wesolvethem.com Cheat Sheet for College Math By WeSolveThem and JJtheTutor Subjects Covered: •...
198
Ultimate Cheat Sheet for College Math By WeSolveThem and JJtheTutor Subjects Covered: • Algebra • Trigonometry • Precalculus • Calculus I aka Differential • Calculus II aka Integral • Calculus III aka Multi or Several Variable • Linear Algebra • Differential Equations with Linear Algebra • Mathematical Physics Operations Students and or Parents: Thank you for reviewing my work. I have over 5-years of experience tutoring subjects such as Algebra, Trigonometry, Precalculus, Calculus (all areas), Linear Algebra, Differential Equations and Physics with outstanding results! Historically, if any student sticks with me for a few hours per week, during the semester, they easily finish the course with an A or at least a high B. My goal in life is to help students understand complex material with ease. I intend on pursuing a career as a math/physics professor. This means you will likely not find someone as dedicated to understanding the information and reiterating as I am. I ensure my utmost attention to every student I work with i.e. I make myself available outside of sessions via text/email for any questions a student may have while studying, I offer additional sessions during exam weeks (per bulk tutoring option), and I have thousands of free resources I have created via my YouTube channel, website, and books I have written on the topics. All of which are free with my services. Thank you again and I look forward to assisting you! Jonathan T. https://jjthetutor.com https://jonathantullis.com https://youtube.com/wesolvethem https://wesolvethem.com
Transcript of wesolvethem.com Cheat Sheet for College Math By WeSolveThem and JJtheTutor Subjects Covered: •...

UltimateCheatSheetforCollegeMath
ByWeSolveThemandJJtheTutorSubjectsCovered:
• Algebra• Trigonometry• Precalculus• CalculusIakaDifferential• CalculusIIakaIntegral• CalculusIIIakaMultiorSeveralVariable• LinearAlgebra• DifferentialEquationswithLinearAlgebra• MathematicalPhysicsOperations
Students and or Parents: Thank you for reviewing my work. I have over 5-years of experience tutoring subjects such as Algebra, Trigonometry, Precalculus, Calculus (all areas), Linear Algebra, Differential Equations and Physics with outstanding results! Historically, if any student sticks with me for a few hours per week, during the semester, they easily finish the course with an A or at least a high B. My goal in life is to help students understand complex material with ease. I intend on pursuing a career as a math/physics professor. This means you will likely not find someone as dedicated to understanding the information and reiterating as I am. I ensure my utmost attention to every student I work with i.e. I make myself available outside of sessions via text/email for any questions a student may have while studying, I offer additional sessions during exam weeks (per bulk tutoring option), and I have thousands of free resources I have created via my YouTube channel, website, and books I have written on the topics. All of which are free with my services. Thank you again and I look forward to assisting you! Jonathan T. https://jjthetutor.com https://jonathantullis.com https://youtube.com/wesolvethem https://wesolvethem.com

Copyright©WESOLVETHEMLLC|WeSolveThem.com2
BooknotationsNote:Somesymbolsmayhavedifferentmeaningsindifferentcoursesi.e.neverassume.And ∧Or ∨In ∈Manipulationorrowreductionoccurred ~Implies ⇒Becomes ⇐Ifandonlyif ⇔Therefore ∴Because ∵Equivalent/definedas ≡Euler’snumber𝑒
𝑒 =1𝑛!
∞
012
= lim0→∞
1 +1𝑛
0
Anyothervector(scalarnotbold/hat/vec) 𝑣 ≡ 𝐯

Copyright©WESOLVETHEMLLC|WeSolveThem.com 3
TableofContentsBooknotations...................................................................................................................................2
ALGEBRA..........................................................................................................................................17GeneralSymbolsandNotations.......................................................................................................................................................17Typesofnumbers...................................................................................................................................................................................18Properties...................................................................................................................................................................................................18Meanings....................................................................................................................................................................................................18Complementationofsets.....................................................................................................................................................................18SetLaws......................................................................................................................................................................................................19DeMorgan’sLaws...................................................................................................................................................................................19NumberofElementsinaSet..............................................................................................................................................................19Axioms.........................................................................................................................................................................................................19Arithmetic..................................................................................................................................................................................................20Exponents..................................................................................................................................................................................................20Radicals.......................................................................................................................................................................................................20ComplexNumbers..................................................................................................................................................................................21AddingandSubtractingFractions...................................................................................................................................................21Logarithmic...............................................................................................................................................................................................21Log“Base”Notation................................................................................................................................................................................21Log“Natural”Notation.........................................................................................................................................................................21
*Factoring...................................................................................................................................................................................................22Note:...............................................................................................................................................................................................................22
LongDivision............................................................................................................................................................................................22CompleteTheSquare............................................................................................................................................................................22Example1:Solvingforx(Formula1)..............................................................................................................................................23Example2:Solvingforx(Formula2)..............................................................................................................................................23
Compositions............................................................................................................................................................................................24Functions....................................................................................................................................................................................................24VerticalLineTest......................................................................................................................................................................................24Even/OddFunction..................................................................................................................................................................................24AverageRateofChange........................................................................................................................................................................24SecantLine..................................................................................................................................................................................................24DifferenceQuotient.................................................................................................................................................................................24
DistanceFormula....................................................................................................................................................................................24MidpointFormula...................................................................................................................................................................................25QuadraticFormula.................................................................................................................................................................................25Proof:.............................................................................................................................................................................................................25Discriminant:..............................................................................................................................................................................................25
GraphingaLine........................................................................................................................................................................................26PointSlopeForm:.....................................................................................................................................................................................26SlopeInterceptForm:.............................................................................................................................................................................26StandardorGeneralForm...................................................................................................................................................................27ParallelLine(equalslopes).................................................................................................................................................................27PerpendicularLine(productofslopesare-1).............................................................................................................................27
*DomainRestrictions............................................................................................................................................................................27Polynomial..................................................................................................................................................................................................27Fraction........................................................................................................................................................................................................27Radical,ifniseven..................................................................................................................................................................................27Radical,ifnisodd....................................................................................................................................................................................27FractionwithRadicalindenominator...........................................................................................................................................27NaturalLog.................................................................................................................................................................................................27

Copyright©WESOLVETHEMLLC|WeSolveThem.com4
Exponential.................................................................................................................................................................................................27InverseFunctions...................................................................................................................................................................................27Asymptotes,HolesandGraphs.........................................................................................................................................................28HoleinaGraph..........................................................................................................................................................................................28ThreeGeneralCasesforHorizontalAsymptotes........................................................................................................................28Ex.1HorizontalandVertical..............................................................................................................................................................29
..................................................................................................................................................................29Ex.2Oblique...............................................................................................................................................................................................29
..............................................................................................................................................................29Ex.3HorizontalandVertical..............................................................................................................................................................29
................................................................................................................................................................29Inequalities................................................................................................................................................................................................29InterestFormulas...................................................................................................................................................................................29PhysicsFormulas....................................................................................................................................................................................29Symmetry...................................................................................................................................................................................................29ByPoint.........................................................................................................................................................................................................30Testing...........................................................................................................................................................................................................30
Variations(Proportionality)..............................................................................................................................................................30CommonGraphsandFormulas........................................................................................................................................................30EquationofaLine....................................................................................................................................................................................33EquationofParabola.............................................................................................................................................................................33EquationofCircle.....................................................................................................................................................................................33EquationofEllipse...................................................................................................................................................................................33EquationofHyperbola(1)...................................................................................................................................................................33EquationofHyperbola(2)...................................................................................................................................................................33Areas..............................................................................................................................................................................................................34SurfaceAreas.............................................................................................................................................................................................34Volumes........................................................................................................................................................................................................34BusinessFunctions...................................................................................................................................................................................34
AverageRateofChangeof𝒇andSlopeofSecantLine...........................................................................................................35DifferenceQuotient.................................................................................................................................................................................35
Functions....................................................................................................................................................................................................35GraphShiftsandCompressions........................................................................................................................................................35Systemsofequations.............................................................................................................................................................................36

Copyright©WESOLVETHEMLLC|WeSolveThem.com 5
Rankofmatrixandpivots...................................................................................................................................................................36Determinate’sofa(2x2)matrix.......................................................................................................................................................37Determinateofa(3x3)andhighermatrices...............................................................................................................................37CofactorExpansion.................................................................................................................................................................................37
TRIGONOMETRY...............................................................................................................................38*Note:...........................................................................................................................................................................................................38RadianandDegreeConversion........................................................................................................................................................38BasicGraphs..............................................................................................................................................................................................39UsingPythagorean’sTheorem..........................................................................................................................................................41ReciprocalIdentities.............................................................................................................................................................................43PythagoreanIdentities.........................................................................................................................................................................44EvenandOddFunctions......................................................................................................................................................................44Example........................................................................................................................................................................................................45
DoubleAngleFormulas........................................................................................................................................................................46HalfAngleFormulas..............................................................................................................................................................................47SumandDifferenceFormulas...........................................................................................................................................................48ProducttoSumFormulas....................................................................................................................................................................48SumtoProductFormulas....................................................................................................................................................................49HyperbolicFunctions........................................................................................................................50Notation......................................................................................................................................................................................................50Graphs..........................................................................................................................................................................................................50Identities.....................................................................................................................................................................................................51DIFFERENTIALCALCULUS(CALCI).....................................................................................................52Translation-...............................................................................................................................................................................................52NotationsforLimits...............................................................................................................................................................................52Theactuallimit.........................................................................................................................................................................................52Lefthandlimit...........................................................................................................................................................................................52Righthandlimit........................................................................................................................................................................................52Limitexists..................................................................................................................................................................................................52Limitdoesnotexists(DNE).................................................................................................................................................................52Continuousfunction................................................................................................................................................................................52LeftContinuousfunction.......................................................................................................................................................................52RightContinuousfunction....................................................................................................................................................................52Non-continuousfunction......................................................................................................................................................................52
TypesofDiscontinuity..........................................................................................................................................................................53Jump...............................................................................................................................................................................................................53Removable...................................................................................................................................................................................................53Infinite...........................................................................................................................................................................................................53
LimitLawsandProperties..................................................................................................................................................................54LimitofaConstant..................................................................................................................................................................................54LimitofSingleVariable.........................................................................................................................................................................54IfTheFunctionisContinuous.............................................................................................................................................................54TheConstantMultipleLaw..................................................................................................................................................................54TheSumandDifferenceLaw..............................................................................................................................................................54TheProductLaw......................................................................................................................................................................................54TheQuotientLaw.....................................................................................................................................................................................54ThePowerLaw..........................................................................................................................................................................................54TheRootLaw.............................................................................................................................................................................................54ExponentialLaw.......................................................................................................................................................................................54
InfiniteLimits...........................................................................................................................................................................................54Case1:...........................................................................................................................................................................................................54

Copyright©WESOLVETHEMLLC|WeSolveThem.com6
Case2:...........................................................................................................................................................................................................54Case3:...........................................................................................................................................................................................................54
PreciseDefinitionofaLimit𝜺, 𝜹.......................................................................................................................................................55Limit...............................................................................................................................................................................................................55LeftHandLimit.........................................................................................................................................................................................55RightHandLimit......................................................................................................................................................................................55
Derivationof“TheDifferenceQuotient”.......................................................................................................................................55SlopeofSecantLineorDifferenceQuotient.................................................................................................................................55IntermediateValueTheorem..............................................................................................................................................................55
CommonLimits........................................................................................................................................................................................56InfiniteLimits.............................................................................................................................................................................................56
Derivatives.......................................................................................................................................57TheLimitDefinitionofaDerivative.................................................................................................................................................57
Notations....................................................................................................................................................................................................57TimeDerivatives.......................................................................................................................................................................................57TheSlopeNotationforCalculus........................................................................................................................................................58
TangentLine.............................................................................................................................................................................................58PhysicsNotation......................................................................................................................................................................................58DerivativeRules(operatornotations)..........................................................................................................................................59DerivativeofaConstant........................................................................................................................................................................59SumandDifference.................................................................................................................................................................................59PowerRule..................................................................................................................................................................................................59ConstantMultipleRule...........................................................................................................................................................................59ProductRule...............................................................................................................................................................................................59QuotientRule.............................................................................................................................................................................................59ChainRule....................................................................................................................................................................................................59
DerivativeRules(primenotations)................................................................................................................................................60DerivativeofaConstant........................................................................................................................................................................60PowerRule..................................................................................................................................................................................................60ConstantMultipleRule...........................................................................................................................................................................60ProductRule...............................................................................................................................................................................................60QuotientRule.............................................................................................................................................................................................60ChainRule....................................................................................................................................................................................................60
ExponentialandLogarithmic............................................................................................................................................................60exp{u}............................................................................................................................................................................................................60NaturalLog.................................................................................................................................................................................................60BaseLog.......................................................................................................................................................................................................60Exponential.................................................................................................................................................................................................60
InverseFunctionDerivative...............................................................................................................................................................60TrigDerivatives.......................................................................................................................................................................................61Standard.......................................................................................................................................................................................................61Inverse...........................................................................................................................................................................................................61
CommonDerivatives.............................................................................................................................................................................61Operator.......................................................................................................................................................................................................61Prime..............................................................................................................................................................................................................62
ImplicitDifferentiation.....................................................................................................................62TangentLine.............................................................................................................................................................................................62RelatedRates............................................................................................................................................................................................63HyperbolicFunctions........................................................................................................................63Notation......................................................................................................................................................................................................63Graphs..........................................................................................................................................................................................................64

Copyright©WESOLVETHEMLLC|WeSolveThem.com 7
Identities.....................................................................................................................................................................................................65Derivatives.................................................................................................................................................................................................65Standard.......................................................................................................................................................................................................65Inverse...........................................................................................................................................................................................................65
Extrema............................................................................................................................................66GraphingProcess....................................................................................................................................................................................66CriticalNumbers.......................................................................................................................................................................................66Max/Min.......................................................................................................................................................................................................66Increasinganddecreasing...................................................................................................................................................................67Concavity......................................................................................................................................................................................................67Pointsofinflection...................................................................................................................................................................................67
Theorems...................................................................................................................................................................................................67Rolle’sTheorem.........................................................................................................................................................................................67MeanValueTheorem..............................................................................................................................................................................67
First&SecondDerivativeTest.........................................................................................................................................................67L’Hospital’sRule...............................................................................................................................68IndeterminateForms............................................................................................................................................................................68Rule...............................................................................................................................................................................................................68Process..........................................................................................................................................................................................................68
Optimization....................................................................................................................................69
BusinessFormulas............................................................................................................................69
Antiderivatives&Integration...........................................................................................................70BasicRules.................................................................................................................................................................................................70RiemannSumforAreaApproximation.........................................................................................................................................70AreaApproximationRules.................................................................................................................................................................71MidpointRule.............................................................................................................................................................................................71TrapezoidRule..........................................................................................................................................................................................71SimpsonRule..............................................................................................................................................................................................71
TheIntegralNotation∫ ...................................................................................................................71DefiniteIntegralProperties...............................................................................................................................................................71FundamentalTheorems.......................................................................................................................................................................72LimitDefinitionofaDefiniteIntegral............................................................................................................................................72DifferentialEquation(1storder).......................................................................................................................................................72CommonIntegrals....................................................................................................................................................................................73
DefiniteIntegralRules..........................................................................................................................................................................73Substitution.................................................................................................................................................................................................74IntegrationbyParts................................................................................................................................................................................74
INTEGRALCALCULUS(CALCLII).........................................................................................................74
ParametricandPolarOperations......................................................................................................74Notations....................................................................................................................................................................................................74FirstDerivative..........................................................................................................................................................................................74SecondDerivative.....................................................................................................................................................................................74
Trigonometric..........................................................................................................................................................................................75Circle..............................................................................................................................................................................................................75Ellipse............................................................................................................................................................................................................75PolarDerivative........................................................................................................................................................................................75PolarEquationsforEllipse...................................................................................................................................................................75PolarEquationsforHyperbola..........................................................................................................................................................75

Copyright©WESOLVETHEMLLC|WeSolveThem.com8
PolarEquationsforParabola.............................................................................................................................................................76Antiderivatives&Integration...........................................................................................................76BasicRules.................................................................................................................................................................................................76RiemannSumforAreaApproximation.........................................................................................................................................77AreaApproximationRules.................................................................................................................................................................77MidpointRule.............................................................................................................................................................................................77TrapezoidRule..........................................................................................................................................................................................77
TheIntegralNotation∫ ...................................................................................................................77DefiniteIntegralProperties...............................................................................................................................................................77FundamentalTheorems.......................................................................................................................................................................78LimitDefinitionofaDefiniteIntegral............................................................................................................................................78DifferentialEquation(1storder).......................................................................................................................................................79CommonIntegrals....................................................................................................................................................................................79
DefiniteIntegralRules..........................................................................................................................................................................80Substitution.................................................................................................................................................................................................80IntegrationbyParts................................................................................................................................................................................80
TrigSubstitution.....................................................................................................................................................................................80TrigIdentity..............................................................................................................................................................................................80PartialFractions......................................................................................................................................................................................80IntegrationSteps..............................................................................................................................81ImproperIntegration............................................................................................................................................................................81InfiniteBounds..........................................................................................................................................................................................81UndefinedBounds....................................................................................................................................................................................81
Areas,Volumes,andCurveLength...................................................................................................82Areawithrespecttoanaxis...............................................................................................................................................................82Cartesian......................................................................................................................................................................................................82
Areabetweencurves.............................................................................................................................................................................82PolarArea...................................................................................................................................................................................................82Volumeaboutanaxis(DiskMethod).............................................................................................................................................82Volumebetweencurves(WasherMethod).................................................................................................................................82CylindricalShellMethod......................................................................................................................................................................83ArcLength..................................................................................................................................................................................................83SurfaceArea..............................................................................................................................................................................................83PhysicsApplications..............................................................................................................................................................................83CenterofMasswithConstantDensity.............................................................................................................................................83
SequencesvsSeries..........................................................................................................................84
SequenceTests.................................................................................................................................84
SeriesTests......................................................................................................................................84Taylorseries.............................................................................................................................................................................................85MaclaurinSeries......................................................................................................................................................................................85PowerSeries.............................................................................................................................................................................................85Radius/IntervalofConverges...........................................................................................................................................................853DCalculus.......................................................................................................................................86Magnitude..................................................................................................................................................................................................86UnitVectors...............................................................................................................................................................................................86Dot/CrossProduct.................................................................................................................................................................................87Dot...................................................................................................................................................................................................................87Properties....................................................................................................................................................................................................87

Copyright©WESOLVETHEMLLC|WeSolveThem.com 9
Cross...............................................................................................................................................................................................................87Properties....................................................................................................................................................................................................87
AnglesBetweenVectors......................................................................................................................................................................87Projections.................................................................................................................................................................................................87Areas/Volume..........................................................................................................................................................................................88Triangle........................................................................................................................................................................................................88Parallelogram............................................................................................................................................................................................88Parallelepiped............................................................................................................................................................................................88
Line...............................................................................................................................................................................................................88Linefromtiptotip...................................................................................................................................................................................88
EquationofaPlane................................................................................................................................................................................88VectorFunctions.....................................................................................................................................................................................88Limit...............................................................................................................................................................................................................89Derivative....................................................................................................................................................................................................89DefiniteIntegral........................................................................................................................................................................................89IndefiniteIntegral....................................................................................................................................................................................89
DifferentiationRules.............................................................................................................................................................................89Arclength...................................................................................................................................................................................................89Tangents.....................................................................................................................................................................................................89UnitTangentVector................................................................................................................................................................................90Curvature1.................................................................................................................................................................................................90Curvature2(vectorfunction).............................................................................................................................................................90Curvature3(singlevariable).............................................................................................................................................................90Curvature4(parametric).....................................................................................................................................................................90NormalVector...........................................................................................................................................................................................90BinormalVector........................................................................................................................................................................................90
TangentialandNormalComponents(acceleration)...............................................................................................................91PhysicsNotations...................................................................................................................................................................................91Position.........................................................................................................................................................................................................91Velocity.........................................................................................................................................................................................................91Speed..............................................................................................................................................................................................................91Acceleration................................................................................................................................................................................................91Curvature.....................................................................................................................................................................................................91TangentialComponent(acceleration)...........................................................................................................................................91NormalComponent(acceleration)..................................................................................................................................................91Acceleration................................................................................................................................................................................................91Note:...............................................................................................................................................................................................................91DotProductofVelocityandAcceleration......................................................................................................................................91TangentialAcceleration........................................................................................................................................................................91NormalAcceleration...............................................................................................................................................................................91Frenet-SerretFormulas.........................................................................................................................................................................92
PartialDerivatives............................................................................................................................92MixedPartial.............................................................................................................................................................................................92TangentPlane...........................................................................................................................................................................................92ChainRule..................................................................................................................................................................................................92MULTIVARIABLECALCULUS(CALCIII)...............................................................................................93Magnitude..................................................................................................................................................................................................93UnitVectors...............................................................................................................................................................................................93Dot/CrossProduct.................................................................................................................................................................................93Dot...................................................................................................................................................................................................................93Properties....................................................................................................................................................................................................93

Copyright©WESOLVETHEMLLC|WeSolveThem.com10
Cross...............................................................................................................................................................................................................93Properties....................................................................................................................................................................................................94
AnglesBetweenVectors......................................................................................................................................................................94Projections.................................................................................................................................................................................................94Areas/Volume..........................................................................................................................................................................................94Triangle........................................................................................................................................................................................................94Parallelogram............................................................................................................................................................................................94Parallelepiped............................................................................................................................................................................................94
Line...............................................................................................................................................................................................................94Linefromtiptotip...................................................................................................................................................................................94
EquationofaPlane................................................................................................................................................................................95VectorFunctions.....................................................................................................................................................................................95Limit...............................................................................................................................................................................................................95Derivative....................................................................................................................................................................................................95DefiniteIntegral........................................................................................................................................................................................95IndefiniteIntegral....................................................................................................................................................................................95
DifferentiationRules.............................................................................................................................................................................95Arclength...................................................................................................................................................................................................95Tangents.....................................................................................................................................................................................................96UnitTangentVector................................................................................................................................................................................96Curvature1.................................................................................................................................................................................................96Curvature2(vectorfunction).............................................................................................................................................................96Curvature3(singlevariable).............................................................................................................................................................96Curvature4(parametric).....................................................................................................................................................................96NormalVector...........................................................................................................................................................................................96BinormalVector........................................................................................................................................................................................96
TangentialandNormalComponents(acceleration)...............................................................................................................97PhysicsNotations...................................................................................................................................................................................97Position.........................................................................................................................................................................................................97Velocity.........................................................................................................................................................................................................97Speed..............................................................................................................................................................................................................97Acceleration................................................................................................................................................................................................97Curvature.....................................................................................................................................................................................................97TangentialComponent(acceleration)...........................................................................................................................................97NormalComponent(acceleration)..................................................................................................................................................97Acceleration................................................................................................................................................................................................97Note:...............................................................................................................................................................................................................97DotProductofVelocityandAcceleration......................................................................................................................................97TangentialAcceleration........................................................................................................................................................................97NormalAcceleration...............................................................................................................................................................................97Frenet-SerretFormulas.........................................................................................................................................................................98
PartialDerivatives............................................................................................................................98MixedPartial.............................................................................................................................................................................................98EquationofaPlane................................................................................................................................................................................98NormalVector...........................................................................................................................................................................................98
Distance/VectorBetweenPoints.....................................................................................................................................................98Vectorfromtwopoints..........................................................................................................................................................................98
TangentPlane...........................................................................................................................................................................................98Equationofasphere..............................................................................................................................................................................99ChainRule..................................................................................................................................................................................................99Gradient𝜵𝒇...............................................................................................................................................................................................99DirectionalDerivative...........................................................................................................................................................................99

Copyright©WESOLVETHEMLLC|WeSolveThem.com 11
Differentials...............................................................................................................................................................................................99ImplicitDifferentiation.........................................................................................................................................................................99Extrema..........................................................................................................................................100LagrangeMultipliers...........................................................................................................................................................................100TwoConstraints.....................................................................................................................................................................................101
MultipleIntegrals...........................................................................................................................101Double........................................................................................................................................................................................................101AverageValue.........................................................................................................................................................................................101TypeI.........................................................................................................................................................................................................101TypeII........................................................................................................................................................................................................101Polar...........................................................................................................................................................................................................102TypeIII......................................................................................................................................................................................................102Moments&CenterofMass...............................................................................................................................................................102Moments....................................................................................................................................................................................................102Centerofmass.........................................................................................................................................................................................102MomentofInertia.................................................................................................................................................................................102
SurfaceArea............................................................................................................................................................................................103TripleIntegrals......................................................................................................................................................................................103Moments&CenterofMass...............................................................................................................................................................103Moments....................................................................................................................................................................................................103CenterofMass.........................................................................................................................................................................................104MomentsofInertia...............................................................................................................................................................................104
CylindricalCoordinates......................................................................................................................................................................104SphericalCoordinates.........................................................................................................................................................................104ChangeofVariables.............................................................................................................................................................................1042DJacobian..............................................................................................................................................................................................1043DJacobian..............................................................................................................................................................................................105
LineIntegrals..................................................................................................................................105General......................................................................................................................................................................................................105Smooth.......................................................................................................................................................................................................105NotSmooth..............................................................................................................................................................................................105
𝒙, 𝒚Derivatives......................................................................................................................................................................................105Vectorform..............................................................................................................................................................................................106Respectto𝒛.............................................................................................................................................................................................106MultipleFunctions𝑷,𝑸, 𝑹................................................................................................................................................................106Work...........................................................................................................................................................................................................106GradientLineIntegral.........................................................................................................................................................................107ConservativeVectorField.................................................................................................................................................................107Green’sTheorem...................................................................................................................................................................................107Curl𝜵.........................................................................................................................................................................................................107Divergence...............................................................................................................................................................................................107StokesTheorem.....................................................................................................................................................................................107DivergenceTheorem...........................................................................................................................................................................108PreCalculusReview........................................................................................................................108Arithmetic................................................................................................................................................................................................108Exponential..............................................................................................................................................................................................108Radicals.....................................................................................................................................................................................................108Fractions...................................................................................................................................................................................................108Logarithmic.............................................................................................................................................................................................109OtherFormulas/Equations..............................................................................................................................................................109

Copyright©WESOLVETHEMLLC|WeSolveThem.com12
Areas...........................................................................................................................................................................................................111SurfaceAreas..........................................................................................................................................................................................111Volumes....................................................................................................................................................................................................111DomainRestrictions............................................................................................................................................................................111RightTriangle.........................................................................................................................................................................................112ReciprocalIdentities............................................................................................................................................................................112
DoubleAngleFormulas......................................................................................................................................................................113HalfAngleFormulas............................................................................................................................................................................113SumandDifferenceFormulas.........................................................................................................................................................113ProducttoSumFormulas..................................................................................................................................................................113SumtoProductFormulas..................................................................................................................................................................113
UnitCircle......................................................................................................................................114
Pre-CALCIIIReference....................................................................................................................115DerivativeRules(primenotations)..............................................................................................................................................115DerivativeofaConstant.....................................................................................................................................................................115PowerRule...............................................................................................................................................................................................115ConstantMultipleRule........................................................................................................................................................................115ProductRule............................................................................................................................................................................................115QuotientRule..........................................................................................................................................................................................115ChainRule.................................................................................................................................................................................................115
ExponentialandLogarithmic..........................................................................................................................................................115exp{u}.........................................................................................................................................................................................................115NaturalLog..............................................................................................................................................................................................115BaseLog....................................................................................................................................................................................................115Exponential..............................................................................................................................................................................................115
InverseFunctionDerivative.............................................................................................................................................................115TrigDerivatives.....................................................................................................................................................................................116Standard....................................................................................................................................................................................................116Inverse........................................................................................................................................................................................................116
CommonDerivatives...........................................................................................................................................................................116Operator....................................................................................................................................................................................................116Prime...........................................................................................................................................................................................................117
ImplicitDifferentiation...................................................................................................................117TangentLine...........................................................................................................................................................................................117RelatedRates..........................................................................................................................................................................................118HyperbolicFunctions......................................................................................................................118Notation....................................................................................................................................................................................................118Identities...................................................................................................................................................................................................118Derivatives...............................................................................................................................................................................................119Standard....................................................................................................................................................................................................119Inverse........................................................................................................................................................................................................119
Antiderivatives&Integration.........................................................................................................119BasicRules...............................................................................................................................................................................................119RiemannSumforAreaApproximation.......................................................................................................................................119AreaApproximationRules...............................................................................................................................................................120MidpointRule..........................................................................................................................................................................................120TrapezoidRule.......................................................................................................................................................................................120
TheIntegralNotation∫ .................................................................................................................121DefiniteIntegralProperties.............................................................................................................................................................121

Copyright©WESOLVETHEMLLC|WeSolveThem.com 13
FundamentalTheorems.....................................................................................................................................................................121LimitDefinitionofaDefiniteIntegral..........................................................................................................................................122DifferentialEquation(1storder)....................................................................................................................................................122CommonIntegrals.................................................................................................................................................................................122
DefiniteIntegralRules........................................................................................................................................................................123Substitution..............................................................................................................................................................................................123IntegrationbyParts.............................................................................................................................................................................123
TrigSubstitution...................................................................................................................................................................................123TrigIdentity............................................................................................................................................................................................123PartialFractions....................................................................................................................................................................................123PHYSICSINFO.................................................................................................................................124Basicsymbols.........................................................................................................................................................................................124Derivingformulas.................................................................................................................................................................................124Units..............................................................................................................................................125SystemInternationalUnits(S.I.Units)........................................................................................................................................125Unitconversion.....................................................................................................................................................................................125Example.....................................................................................................................................................................................................125
Vectors...........................................................................................................................................125Notation....................................................................................................................................................................................................125Addition/Subtraction..........................................................................................................................................................................125Visually.......................................................................................................................................................................................................125DotProduct..............................................................................................................................................................................................126CrossProduct..........................................................................................................................................................................................126MagnitudeorLengthofavector....................................................................................................................................................127Unitizingavector..................................................................................................................................................................................127ResultantVector....................................................................................................................................................................................127
Summingitup........................................................................................................................................................................................128FreeBodyDiagram..............................................................................................................................................................................129Averagevelocity(straight-line)......................................................................................................................................................130Instantaneousvelocity(Calculus).................................................................................................................................................130ParametricEquationGraphingExample...................................................................................................................................131
AverageAcceleration(straight-line)............................................................................................................................................131InstantaneousAcceleration(Calculus).......................................................................................................................................131Formulas(one-dimensional)...........................................................................................................................................................131Velocity:.....................................................................................................................................................................................................132AverageVelocity:...................................................................................................................................................................................132Distance:....................................................................................................................................................................................................132Velocity:.....................................................................................................................................................................................................132Distance:....................................................................................................................................................................................................132
IntegrationDerivations(Calculus)................................................................................................................................................132VectorNotations...................................................................................................................................................................................132VectorDerivatives................................................................................................................................................................................132Magnitudeofvector.............................................................................................................................................................................133ProjectileMotion...................................................................................................................................................................................133CircularMotion..............................................................................................................................133
Force..............................................................................................................................................134Resultantvector𝑹(thesumofallvectors)...............................................................................................................................134
Newton’sFirstLawofMotion.........................................................................................................................................................134Newtonunit𝑵........................................................................................................................................................................................134
Newton’sSecondLawofMotion....................................................................................................................................................134

Copyright©WESOLVETHEMLLC|WeSolveThem.com14
Formulas...................................................................................................................................................................................................134LINEARALGEBRA............................................................................................................................134
Rankofmatrixandpivots...............................................................................................................135
Lengthofavectorandtheunitvector............................................................................................135
SolutionsofAugmentedMatrices...................................................................................................136CoefficientMatrix.................................................................................................................................................................................136UniqueSolution.....................................................................................................................................................................................137InfiniteSolution.....................................................................................................................................................................................137NoSolution..............................................................................................................................................................................................137SolvingSystemofEquations...........................................................................................................137
GaussJordanAugmentedMatrix....................................................................................................138
RowOperationRulesandGuidelinesforSolveaSystemofMatrices..............................................139
EchelonForms:EF,REF,RREF.........................................................................................................141EchelonForm.........................................................................................................................................................................................141ReducedEchelonForm......................................................................................................................................................................141ReducedRowEchelonForm............................................................................................................................................................141LinearDependence.........................................................................................................................142Linearcombination..............................................................................................................................................................................142Ex1:Setu,v,wLinearlyDependent..............................................................................................................................................142Ex2:Setu,v,wLinearlyIndependent...........................................................................................................................................143Ex3:VectorsLinearlyIndependent.............................................................................................................................................143Ex4:VectorsLinearlyD.....................................................................................................................................................................143ependent...................................................................................................................................................................................................143Ex5:Polynomials..................................................................................................................................................................................144Ex6:(M_(2x2))......................................................................................................................................................................................144ColumnSpace-RowSpace-NullSpace-Kernel.............................................................................145IdentifyRowSpace...............................................................................................................................................................................145IdentifyColumnSpace........................................................................................................................................................................145NullSpace(Kernel)..............................................................................................................................................................................145LUDDecompositionandElementaryMatrices................................................................................146
Transpose.......................................................................................................................................147
SymmetricmatrixforA=LDU=LDL^T...............................................................................................148
Matrixadditionandsubtraction.....................................................................................................149
Multiplythematrices(2x2)(2x3).....................................................................................................150
MatrixMultiplication(mxn)(nxp)...................................................................................................150
Idempotentmatrix.........................................................................................................................152
RotationandTranslate...................................................................................................................153Ex.1.............................................................................................................................................................................................................153Ex.2.............................................................................................................................................................................................................154Rotateaboutapoint𝒄, 𝒅................................................................................................................155
Nilpotentmatrix(eigenvaluesarezero)..........................................................................................155

Copyright©WESOLVETHEMLLC|WeSolveThem.com 15
Determinantrules..........................................................................................................................156
Proofs............................................................................................................................................157
Determinate’sofa(2x2)matrix......................................................................................................158
Determinateofa(3x3)andhighermatrices....................................................................................159CofactorExpansion..............................................................................................................................................................................159VectorSpace,SubspaceandSubset................................................................................................161
Cramer’srules................................................................................................................................162
Basiscoordinatevector..................................................................................................................162Ex.1..............................................................................................................................................................................................................162Ex.2.............................................................................................................................................................................................................163Adjugateofamatrix.......................................................................................................................164ComputetheAdjugate........................................................................................................................................................................165Inverseofa2x2Matrix...................................................................................................................165
Inverseof3x3.................................................................................................................................167
Trace..............................................................................................................................................168
CholeskyDecomposition................................................................................................................169
Eigenvalues....................................................................................................................................170
Eigenvectors...................................................................................................................................170
DiagonlizeaMatrix........................................................................................................................171
SingularValueDecomposition........................................................................................................172
Systemofdifferentialequations.....................................................................................................173
LinearProgramming:SimplexMethod............................................................................................174
DIFFERENTIALEQUATIONS.............................................................................................................175Introtothefirst-orderdifferentialequation............................................................................................................................175Homogeneous..........................................................................................................................................................................................176Nonhomogeneous..................................................................................................................................................................................176Linear.........................................................................................................................................................................................................176Non-linear................................................................................................................................................................................................176
1stOrderSolutionMethods............................................................................................................177SeparableVariable...............................................................................................................................................................................177Scenario.....................................................................................................................................................................................................177Ex.1(Explicitvs.Implicit).................................................................................................................................................................177Ex.2(SeparableVariable)................................................................................................................................................................178Ex.3*(IVPProblem)............................................................................................................................................................................178
1stOrderLinearNon-homogeneousi.e.y’+P(x)y=Q(x)........................................................................................................179Process.......................................................................................................................................................................................................179Ex.1.............................................................................................................................................................................................................179Ex.2.............................................................................................................................................................................................................179
ExactDifferentialEquation..............................................................................................................................................................180Situation....................................................................................................................................................................................................180Ex.1.............................................................................................................................................................................................................180

Copyright©WESOLVETHEMLLC|WeSolveThem.com16
Note:............................................................................................................................................................................................................181General,ParticularandSuperpositionSolutions....................................................................................................................181GeneralSolution....................................................................................................................................................................................181ParticularSolution...............................................................................................................................................................................181SuperpositionSolution........................................................................................................................................................................181
LinearHomogenouswithConstantCoefficients.....................................................................................................................181Scenario.....................................................................................................................................................................................................181Auxiliaryequation................................................................................................................................................................................181Solution(s)................................................................................................................................................................................................181GenerallySpeaking...............................................................................................................................................................................182Ex.1.............................................................................................................................................................................................................182Ex.2.............................................................................................................................................................................................................183Ex.3.............................................................................................................................................................................................................183Ex.4.............................................................................................................................................................................................................183Ex.5IVPy(0)=1,y’(0)=2,y’’(0)=3,y’’’(0)=4...............................................................................................................................184
ReductionofOrder...............................................................................................................................................................................184Process.......................................................................................................................................................................................................184Solution......................................................................................................................................................................................................184Ex.1.............................................................................................................................................................................................................185
Substitution.............................................................................................................................................................................................185GeneralSituation...................................................................................................................................................................................185SubstitutionSolutionMethod..........................................................................................................................................................185
IntegratingFactors...............................................................................................................................................................................187Ex.1.............................................................................................................................................................................................................187
SECONDORDERDIFFERENTIALEQUATIONS....................................................................................188Auxiliaryequation................................................................................................................................................................................188Solution(s)...............................................................................................................................................................................................188ReductionofOrder...............................................................................................................................................................................191Bessel’sEquationofOrder𝒗............................................................................................................................................................193SolutiontoFirstKindBessel(𝒗 =fraction)..............................................................................................................................193SolutiontoSecondKindBessel(𝒗 =integer)...........................................................................................................................194SolutiontoThirdKindBessel(𝜶𝒙 = 𝒕).......................................................................................................................................194
Variationofparameters.....................................................................................................................................................................194Methodofundeterminedcoefficients..........................................................................................................................................195SecondSolutionforReductionofOrder.....................................................................................................................................196UnitCircle......................................................................................................................................198
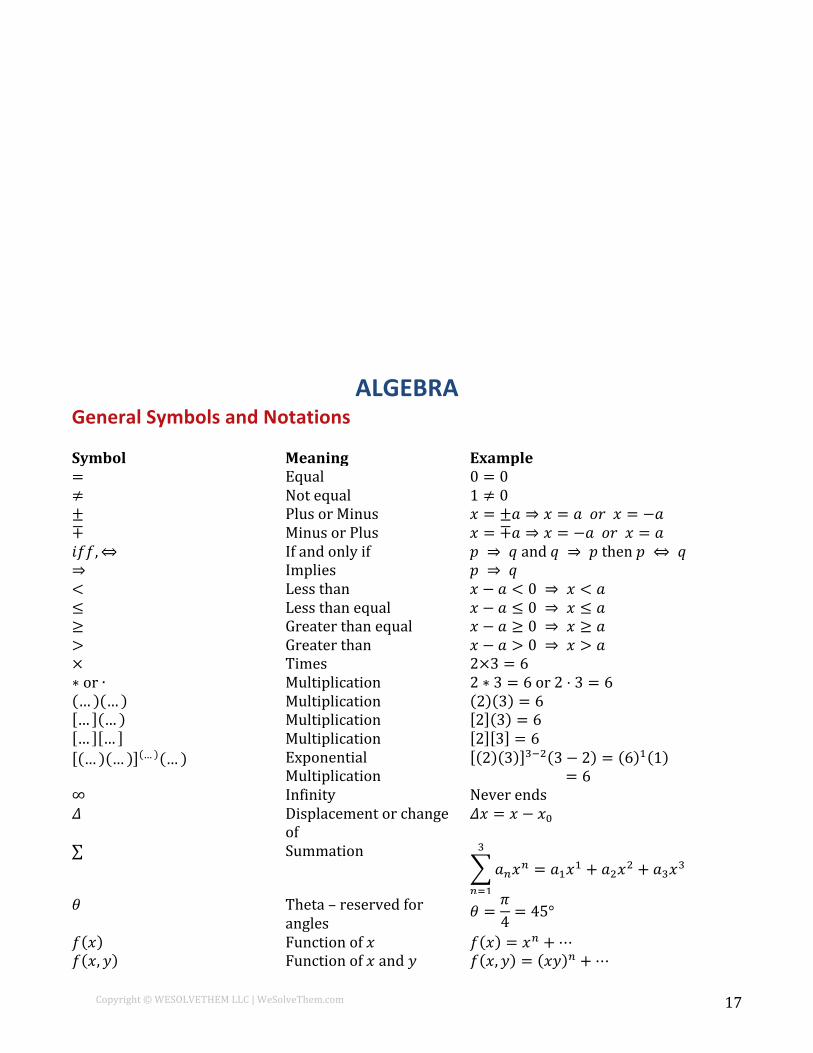
Copyright©WESOLVETHEMLLC|WeSolveThem.com 17
ALGEBRAGeneralSymbolsandNotationsSymbol Meaning Example= Equal 0 = 0≠ Notequal 1 ≠ 0± PlusorMinus 𝑥 = ±𝑎 ⇒ 𝑥 = 𝑎𝑜𝑟𝑥 = −𝑎∓ MinusorPlus 𝑥 = ∓𝑎 ⇒ 𝑥 = −𝑎𝑜𝑟𝑥 = 𝑎𝑖𝑓𝑓,⇔ Ifandonlyif 𝑝 ⇒ 𝑞and𝑞 ⇒ 𝑝then𝑝 ⇔ 𝑞⇒ Implies 𝑝 ⇒ 𝑞< Lessthan 𝑥 − 𝑎 < 0 ⇒ 𝑥 < 𝑎≤ Lessthanequal 𝑥 − 𝑎 ≤ 0 ⇒ 𝑥 ≤ 𝑎≥ Greaterthanequal 𝑥 − 𝑎 ≥ 0 ⇒ 𝑥 ≥ 𝑎> Greaterthan 𝑥 − 𝑎 > 0 ⇒ 𝑥 > 𝑎× Times 2×3 = 6∗ or ∙ Multiplication 2 ∗ 3 = 6or2 ⋅ 3 = 6… … Multiplication 2 3 = 6… … Multiplication 2 3 = 6… … Multiplication 2 3 = 6… … … … Exponential
Multiplication2 3 opq 3 − 2 = 6 r 1
= 6∞ Infinity Neverends𝛥 Displacementorchange
of𝛥𝑥 = 𝑥 − 𝑥2
∑ Summation𝑎0𝑥0
o
01r
= 𝑎r𝑥r + 𝑎q𝑥q + 𝑎o𝑥o
𝜃 Theta–reservedforangles
𝜃 =𝜋4 = 45°
𝑓 𝑥 Functionof𝑥 𝑓 𝑥 = 𝑥0 +⋯𝑓 𝑥, 𝑦 Functionof𝑥and𝑦 𝑓 𝑥, 𝑦 = 𝑥𝑦 0 +⋯
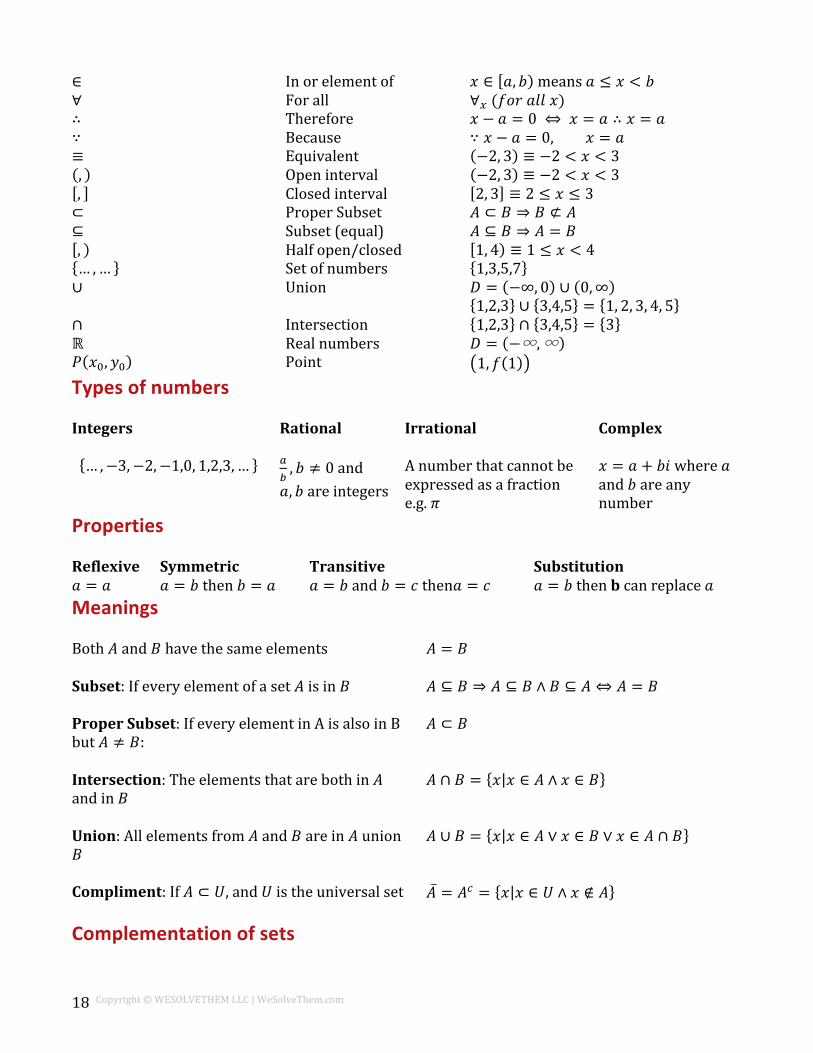
Copyright©WESOLVETHEMLLC|WeSolveThem.com18
∈ Inorelementof 𝑥 ∈ 𝑎, 𝑏 means𝑎 ≤ 𝑥 < 𝑏∀ Forall ∀�(𝑓𝑜𝑟𝑎𝑙𝑙𝑥)∴ Therefore 𝑥 − 𝑎 = 0 ⇔ 𝑥 = 𝑎 ∴ 𝑥 = 𝑎∵ Because ∵ 𝑥 − 𝑎 = 0, 𝑥 = 𝑎≡ Equivalent −2, 3 ≡ −2 < 𝑥 < 3, Openinterval −2, 3 ≡ −2 < 𝑥 < 3, Closedinterval 2, 3 ≡ 2 ≤ 𝑥 ≤ 3⊂ ProperSubset 𝐴 ⊂ 𝐵 ⇒ 𝐵 ⊄ 𝐴⊆ Subset(equal) 𝐴 ⊆ 𝐵 ⇒ 𝐴 = 𝐵, Halfopen/closed 1, 4 ≡ 1 ≤ 𝑥 < 4… ,… Setofnumbers 1,3,5,7 ∪ Union 𝐷 = −∞, 0 ∪ 0,∞
1,2,3 ∪ 3,4,5 = 1, 2, 3, 4, 5 ∩ Intersection 1,2,3 ∩ 3,4,5 = 3 ℝ Realnumbers 𝐷 = −∞,∞ 𝑃 𝑥2, 𝑦2 Point 1, 𝑓 1 TypesofnumbersIntegers
Rational
Irrational
Complex
… ,−3,−2,−1,0, 1,2,3, … ��, 𝑏 ≠ 0and𝑎, 𝑏areintegers
Anumberthatcannotbeexpressedasafractione.g.𝜋
𝑥 = 𝑎 + 𝑏𝑖where𝑎and𝑏areanynumber
PropertiesReflexive Symmetric Transitive Substitution𝑎 = 𝑎 𝑎 = 𝑏then𝑏 = 𝑎 𝑎 = 𝑏and𝑏 = 𝑐then𝑎 = 𝑐 𝑎 = 𝑏thenbcanreplace𝑎MeaningsBoth𝐴and𝐵havethesameelements 𝐴 = 𝐵
Subset:Ifeveryelementofaset𝐴isin𝐵
𝐴 ⊆ 𝐵 ⇒ 𝐴 ⊆ 𝐵 ∧ 𝐵 ⊆ 𝐴 ⇔ 𝐴 = 𝐵
ProperSubset:IfeveryelementinAisalsoinBbut𝐴 ≠ 𝐵:
𝐴 ⊂ 𝐵
Intersection:Theelementsthatarebothin𝐴andin𝐵
𝐴 ∩ 𝐵 = 𝑥 𝑥 ∈ 𝐴 ∧ 𝑥 ∈ 𝐵
Union:Allelementsfrom𝐴and𝐵arein𝐴union𝐵
𝐴 ∪ 𝐵 = 𝑥 𝑥 ∈ 𝐴 ∨ 𝑥 ∈ 𝐵 ∨ 𝑥 ∈ 𝐴 ∩ 𝐵
Compliment:If𝐴 ⊂ 𝑈,and𝑈istheuniversalset
𝐴 = 𝐴� = 𝑥 𝑥 ∈ 𝑈 ∧ 𝑥 ∉ 𝐴
Complementationofsets

Copyright©WESOLVETHEMLLC|WeSolveThem.com 19
a. 𝑈� = ∅
b. ∅� = 𝑈
c. 𝐴� � = 𝐴
d. 𝐴 ∪ 𝐴� = 𝑈
e. 𝐴 ∩ 𝐴� = ∅
SetLaws𝐴 ∪ 𝐵 = 𝐵 ∪ 𝐴
Commutativelawforunion
𝐴 ∩ 𝐵 = 𝐵 ∩ 𝐴 Commutativelawforintersection
𝐴 ∪ 𝐵 ∪ 𝐶 = 𝐴 ∪ 𝐵 ∪ 𝐶
Associativelawforunion
𝐴 ∩ 𝐵 ∩ 𝐶 = 𝐴 ∩ 𝐵 ∩ 𝐶
Associativelawforintersection
𝐴 ∪ 𝐵 ∩ 𝐶 = 𝐴 ∪ 𝐵 ∩ 𝐴 ∪ 𝐶
Distributivelawforunion
𝐴 ∩ 𝐵 ∪ 𝐶 = 𝐴 ∩ 𝐵 ∪ 𝐴 ∩ 𝐶 DistributivelawforintersectionDeMorgan’sLaws
i. 𝐴 ∪ 𝐵 � = 𝐴� ∩ 𝐵� ii. 𝐴 ∩ 𝐵 � = 𝐴� ∪ 𝐵� NumberofElementsinaSetNote:𝐴 ∧ 𝐵arefinitesets𝑛 𝐴 ∪ 𝐵 = 𝑛 𝐴 + 𝑛 𝐵 − 𝑛 𝐴 ∩ 𝐵 𝑛 𝐴 ∩ 𝐵 = 𝑛 𝐴 + 𝑛 𝐵 − 𝑛 𝐴 ∪ 𝐵 𝑛 𝐴 ∪ 𝐵 ∪ 𝐶 = 𝑛 𝐴 + 𝑛 𝐵 + 𝑛 𝐶 − 𝑛 𝐴 ∩ 𝐵 − 𝑛 𝐴 ∩ 𝐶 − 𝑛 𝐵 ∩ 𝐶 + 𝑛(𝐴 ∩ 𝐵 ∩ 𝐶)AxiomsSubstitutionPrinciple If𝑎 = 𝑏,then𝑎canbesubstitutedfor𝑏
Commutative–Addition 𝑎 + 𝑏 = 𝑏 + 𝑎
Commutative–Multiplication 𝑎𝑏 = 𝑏𝑎
Associativity–Addition 𝑎 + 𝑏 + 𝑐 = 𝑎 + 𝑏 + 𝑐
Associativity–Multiplication 𝑎 𝑏𝑐 = 𝑎𝑏 𝑐
Reflexive 𝑎 = 𝑎
Symmetric If𝑎 = 𝑏then𝑏 = 𝑎
Transitive If𝑎 = 𝑏and𝑏 = 𝑐then𝑎 = 𝑐

Copyright©WESOLVETHEMLLC|WeSolveThem.com20
DistributionProperty 𝑎 𝑏 + 𝑐 = 𝑎𝑏 + 𝑎𝑐and 𝑎 + 𝑏 𝑐 = 𝑎𝑐 + 𝑏𝑐
CancellationProperty − −𝑎 = 𝑎
Identity–Addition 𝑎 + 0 = 𝑎and0 + 𝑎 = 𝑎
AdditiveInverse 𝑎 + −𝑎 = 0and– 𝑎 + 𝑎 = 0
Identity–Multiplication 𝑎 1 = 𝑎and 1 𝑎 = 𝑎
MultiplicativeProperty–Zero 𝑎 0 = 0and 0 𝑎 = 0
MultiplicativePropertyfor-1 𝑎 −1 = −𝑎and −1 𝑎 = −𝑎
MultiplicativeInverse 𝑎 𝑎pr = 1and 𝑎pr 𝑎 = 1
Arithmetic𝑎𝑏 ± 𝑎𝑐 = 𝑎 𝑏 ± 𝑐 = 𝑏 ± 𝑐 𝑎
𝑎𝑏𝑐 =
𝑎𝑏𝑐
𝑎𝑏 ±
𝑐𝑑 =
𝑎𝑑 ± 𝑏𝑐𝑏𝑑
𝑎 − 𝑏𝑐 − 𝑑 =
𝑏 − 𝑎𝑑 − 𝑐
𝑎𝑏 + 𝑎𝑐𝑎 = 𝑏 + 𝑐, 𝑎 ≠ 0
𝑎𝑏𝑐 =
𝑎𝑏𝑐
𝑎𝑏𝑐=
𝑎1 ∙
𝑐𝑏 =
𝑎𝑐𝑏
𝑎 ± 𝑏𝑐 =
𝑎𝑐 ±
𝑏𝑐
𝑎𝑏𝑐𝑑
=𝑎𝑏 ∙𝑑𝑐 =
𝑎𝑑𝑏𝑐
𝑖𝑓𝑎 ± 𝑏 = 0𝑡ℎ𝑒𝑛𝑎 = ∓𝑏 Exponents𝑎r = 𝑎
𝑎2 = 1
𝑎p0 =1𝑎0
1𝑎p0 = 𝑎0
𝑎0𝑎� = 𝑎0��
𝑎0
𝑎� = 𝑎0p�
𝑎𝑏
0=𝑎0
𝑏0
𝑎𝑏
p0=𝑎p0
𝑏p0 =𝑏0
𝑎0
𝑎0r� = 𝑎
0� = 𝑎
r�
0
𝑎0 � = 𝑎0� = 𝑎�0 = 𝑎� 0Radicals

Copyright©WESOLVETHEMLLC|WeSolveThem.com 21
𝑎 = 𝑎� = 𝑎r� = 𝑎rq
𝑎��= 𝑎�� = 𝑎
r�0
𝑎0� = 𝑎, 𝑛𝑖𝑠𝑜𝑑𝑑
𝑎𝑏
�=
𝑎�
𝑏� =𝑎r0
𝑏r0=
𝑎𝑏
r0
𝑎�� = 𝑎�0
𝑎0� = 𝑎 , 𝑛𝑖𝑠𝑒𝑣𝑒𝑛
𝑥q = 𝑥 , −∞ < 𝑥 <∞ 𝑥q= 𝑥, 𝑥 ≥ 0
ComplexNumbers𝑥 = 𝑎 ± 𝑖𝑏
Conjugate𝑥 = 𝑎 ∓ 𝑏𝑖 𝑎 + 𝑏𝑖 𝑐 + 𝑑𝑖 = 𝑎𝑐 − 𝑏𝑑 + 𝑎𝑑 + 𝑏𝑐 𝑖
𝑖 = −1
𝑖q = −1
−𝑎 = 𝑖 𝑎,𝑎 ≥ 0𝑥𝑥 = 𝑎q + 𝑏q
AddingandSubtractingFractions
𝑎𝑏 ±
𝑐𝑑 =
𝑎𝑑 ± 𝑏𝑐𝑏𝑑
𝑔 𝑥𝑓 𝑥 ±
ℎ 𝑥𝑟 𝑥 =
𝑔 𝑥 𝑟 𝑥 ± 𝑓 𝑥 ℎ 𝑥𝑓 𝑥 𝑟 𝑥
LogarithmicLog“Base”NotationNote:log 𝑥 = logr2 𝑥 oritmaybe log 𝑥 = ln 𝑥 = log¤ 𝑥;log xisthegeneralnotationforln xbutinsomebooksorcalculatorslog x = logr2 xandvice-versa.ln 𝑏ln 𝑎 = log� 𝑏
𝑦 = log� 𝑥 ⇒ 𝑥 = 𝑏¦
𝑒 = 2.718281828…
log� 𝑎 = 1
log� 1 = 0
log� 𝑎� = 𝑥
log¤ 𝑥 = ln 𝑥
log� 𝑥� = 𝑏 log� 𝑥
log� 𝑥𝑦 = log� 𝑥 + log� 𝑦
log�𝑥𝑦 = log� 𝑥 − log� 𝑦
𝑒 =
1𝑛!
∞
012
𝑒�© =𝑎0𝑡0
𝑛!
∞
012
Log“Natural”Notation*Itisunlikelythatthenotationinvolving“log”willbeusedthroughoutthecourse;youmayseeitinthebeginningofthecourse,asareviewofsomesortbutthatshouldbeaboutallyou’llsee.The“ln 𝑢”notationwillbethestandardasitiseasiertomanipulate.
log� 𝑏 =ln 𝑏ln 𝑎
𝑦 = ln 𝑥 ⇒ 𝑥 = 𝑒¦
𝑦 = 𝑒� ⇒ 𝑥 = ln 𝑦

Copyright©WESOLVETHEMLLC|WeSolveThem.com22
𝑒 =1𝑛!
«
012
ln 𝑎 = undefined, 𝑎 ≤ 0
ln 1 = 0
ln 𝑒� = 𝑥 ⇒ 𝑒®¯ � = 𝑥
ln 𝑒r = 1 ⇒ 𝑒®¯ r = 1
ln 𝑥� = 𝑏 ln 𝑥
ln 𝑥𝑦 = ln 𝑥 + ln 𝑦
ln𝑥𝑦 = ln 𝑥 − ln 𝑦
ln 𝑥pr = ln1𝑥 = − ln 𝑥
Domains: ln 𝑥 , 𝐷 = 0,∞
ln 𝑥 , 𝐷 = 𝑥 𝑥 > 0, 𝑥 < 0
*Factoring𝑥0 + 𝑥� = 𝑥0 1 + 𝑥�p0 = 𝑥� 𝑥0p� + 1
𝑥q − 𝑎q = 𝑥 + 𝑎 𝑥 − 𝑎
𝑥q + 2𝑎𝑥 + 𝑎q = 𝑥 + 𝑎 q 𝑥q + 𝑎 + 𝑏 𝑥 + 𝑎𝑏 = (𝑥 + 𝑎)(𝑥 + 𝑏)
𝑥o + 3𝑎𝑥q + 3𝑎q𝑥 + 𝑎o = 𝑥 + 𝑎 o
𝑥o − 3𝑎𝑥q + 3𝑎q𝑥 − 𝑎o = 𝑥 − 𝑎 o
𝑥o + 𝑎o = (𝑥 + 𝑎)(𝑥q − 𝑎𝑥 + 𝑎q)
𝑥o − 𝑎o = 𝑥 − 𝑎 𝑎q + 𝑎𝑥 + 𝑥q
𝑥 + 𝑎 o = 𝑥o + 3𝑎𝑥q + 3𝑎q𝑥 + 𝑎o
𝑥 − 𝑎 o = 𝑥o − 3𝑎𝑥q + 3𝑎q𝑥 − 𝑎o
Note:*Commonmistakestudentsmakewhen
solvingforx:
Thesolutionof𝑥 = 0waslost,thus:
𝑥q − 𝑥 = 0 ⇒ 𝑥q = 𝑥 ⇒ 𝑥 = 1 𝑥q − 𝑥 = 0
⇒ 𝑥 𝑥 − 1 = 0 ⇔ 𝑥 = 0𝑜𝑟𝑥 = 1LongDivision(quotient)(divisor)+(remainder)=dividend
P=Divisor Q=Dividend R=Quotient
CompleteTheSquare

Copyright©WESOLVETHEMLLC|WeSolveThem.com 23
𝑦 = 𝑎𝑥q + 𝑏𝑥 + 𝑐
= 𝑎 𝑥q +𝑏𝑎 𝑥 + 𝑐 = 𝑎 𝑥q +
𝑏𝑎 𝑥 +
𝑏2𝑎
q
−𝑏2𝑎
q
+ 𝑐
= 𝑎 𝑥q +𝑏𝑎 𝑥 +
𝑏2𝑎
q
− 𝑎𝑏2𝑎
q
+ 𝑐 = 𝑎 𝑥 +𝑏2𝑎
q
− 𝑎𝑏q
4𝑎q + 𝑐
= 𝑎 𝑥 +𝑏2𝑎
q
−𝑏q
4𝑎 + 𝑐
∴ 𝑦 = 𝑎 𝑥 +𝑏2𝑎
q
+ 𝑐 −𝑏q
4𝑎Example1:Solvingforx(Formula1)
𝑎𝑥q + 𝑏𝑥 = 0
⇒ 𝑥q +𝑏𝑎 𝑥 =
0𝑎 ⇒ 𝑥q +
𝑏𝑎 𝑥 + 0 = 0
⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑏2𝑎
q
−𝑏2𝑎
q
= 0 ⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑏2𝑎
q
=𝑏2𝑎
q
⇒ 𝑥 +𝑏2𝑎
q
=𝑏q
4𝑎q ⇒ 𝑥 +𝑏2𝑎 = ±
𝑏q
4𝑎q ⇒ 𝑥 = −𝑏2𝑎 ±
𝑏2𝑎
∴ 𝑥 = 0or𝑥 = −𝑏𝑎
Example2:Solvingforx(Formula2)
𝑎𝑥q + 𝑏𝑥 + 𝑐 = 0
⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑐𝑎 =
0𝑎 ⇒ 𝑥q +
𝑏𝑎 𝑥 +
𝑐𝑎 +
𝑏2𝑎
q
−𝑏2𝑎
q
= 0
⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑏2𝑎
q
=𝑏q
2q𝑎q −𝑐𝑎 ⇒ 𝑥 +
𝑏2𝑎
q
=𝑏q − 4𝑎𝑐4𝑎q
⇒ 𝑥 +𝑏2𝑎 = ±
𝑏q − 4𝑎𝑐2𝑎 ⇒ 𝑥 = −
𝑏2𝑎 ±
𝑏q − 4𝑎𝑐2𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com24
∴ 𝑥 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎
Compositions𝑓 ∘ 𝑔 𝑥 = 𝑓 𝑔 𝑥
𝑓 ± 𝑔 𝑥 = 𝑓 𝑥 ± 𝑔 𝑥
𝑓 ∙ 𝑔 𝑥 = 𝑓 𝑥 𝑔 𝑥
𝑓𝑔 𝑥 =
𝑓 𝑥𝑔 𝑥 , 𝑔 𝑥 ≠ 0
FunctionsVerticalLineTest𝑓 𝑥 isafunctionifitpassestheverticallinetesti.e.ifyoudrawaverticallineanywhereonthegraph,andthegraphof𝑓onlycrossesitonce.Even/OddFunctionEven: 𝑓 −𝑥 = 𝑓 𝑥
(symmetricwithrespectto𝑦-axis)
Odd: 𝑓 −𝑥 = −𝑓 𝑥 (symmetricwithrespecttoorigin)
AverageRateofChange
𝛥𝑦𝛥𝑥 =
𝑓 𝑥 − 𝑓 𝑥2𝑥 − 𝑥2
, 𝑥 ≠ 𝑥2
SecantLineTheslopeofthesecantlineisthesameastheaveragerateofchangei.e.𝑚 = ² � p² �³
�p�³youthen
takeoneofthetwopointsandplugtheitinto𝑦 − 𝑦2 =² � p² �³
�p�³𝑥 − 𝑥2 andsimplify.
DifferenceQuotient
𝑚 =𝑓 𝑥 + 𝛥𝑥 − 𝑓 𝑥
𝛥𝑥 =𝑓 𝑥 + ℎ − 𝑓 𝑥
ℎ
DistanceFormulaDistancebetweentwopointsonanumberline
DistancebetweentwopointsinaCartesiancoordinatesystemi.e.xvs.ygraph
𝑃 𝑥2 = 𝑃 𝑥r = 𝑃 𝑎 , 𝑄 = 𝑄 𝑥 = 𝑄 𝑥q = 𝑄 𝑏
𝑃 𝑥2, 𝑦2 , 𝑄 𝑥, 𝑦

Copyright©WESOLVETHEMLLC|WeSolveThem.com 25
𝑑 𝑃, 𝑄 = 𝑥 − 𝑥2 q = 𝑥 − 𝑥2
= 𝑏 − 𝑎 q = 𝑏 − 𝑎 = 𝑥q − 𝑥r q = 𝑥q − 𝑥r
𝑑 𝑃, 𝑄 = 𝑥 − 𝑥2 q + 𝑦 − 𝑦2 q
MidpointFormula𝑃 𝑥r, 𝑦r &𝑄 𝑥q, 𝑦q 𝑚 𝑃,𝑄 =
𝑥q + 𝑥r2 ,
𝑦q + 𝑦r2
QuadraticFormula
𝑎𝑥q + 𝑏𝑥 + 𝑐 = 0 ⇔ 𝑥 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎 Proof:
𝑎𝑥q + 𝑏𝑥 + 𝑐 = 0
⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑐𝑎 =
0𝑎 ⇒ 𝑥q +
𝑏𝑎 𝑥 +
𝑐𝑎 +
𝑏2𝑎
q
−𝑏2𝑎
q
= 0
⇒ 𝑥q +𝑏𝑎 𝑥 +
𝑏2𝑎
q
=𝑏q
2q𝑎q −𝑐𝑎 ⇒ 𝑥 +
𝑏2𝑎
q
=𝑏q − 4𝑎𝑐4𝑎q
⇒ 𝑥 +𝑏2𝑎 = ±
𝑏q − 4𝑎𝑐2𝑎 ⇒ 𝑥 = −
𝑏2𝑎 ±
𝑏q − 4𝑎𝑐2𝑎
∴ 𝑥 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎
Discriminant:
i)Tworealsolutionsif𝑏q − 4𝑎𝑐 > 0ii)Repeatedsolutionsif𝑏q − 4𝑎𝑐 = 0iii)Twocomplexsolutions𝑖𝑓𝑏q − 4𝑎𝑐 < 0

Copyright©WESOLVETHEMLLC|WeSolveThem.com26
GraphingaLineFromtheform𝑦 = 𝑚𝑥 + 𝑏youcaneasilygraphalinebyidentifyingtwopointsandthenconnectingthem.Theequationwillmoregenerallyappearas𝑦 = �
±»𝑥 + 𝑏where𝑚 = �
±»,𝑐istheriseand
±𝑑istherun(𝑐alwaysgoesupand𝑑goeseitherleftorright.)
Thefirstpointis𝑃r 0, 𝑏 Thesecondpointis𝑃q(±𝑑, 𝑏 + 𝑐)Plotthesetwopointsandconnectalinethroughthem.
PointSlopeForm:𝑦 − 𝑦2 = 𝑚 𝑥 − 𝑥2
𝑚 = 𝑠𝑙𝑜𝑝𝑒 =𝛥𝑦𝛥𝑥
⇒ 𝑚 =𝛥𝑦𝛥𝑥 =
𝑦 − 𝑦2𝑥 − 𝑥2
⇒ 𝑚 =
𝑦 − 𝑦2𝑥 − 𝑥2
⇒ 𝑥 − 𝑥2 𝑚 = 𝑦 − 𝑦2
∴ 𝑦 − 𝑦2 = 𝑚(𝑥 − 𝑥2)
SlopeInterceptForm:𝑦 = 𝑚𝑥 + 𝑏
𝑚 = 𝑠𝑙𝑜𝑝𝑒 =𝛥𝑦𝛥𝑥 ⇒ 𝑚 =
𝛥𝑦𝛥𝑥 =
𝑦 − 𝑦2𝑥 − 𝑥2
⇒ 𝑚 =
𝑦 − 𝑦2𝑥 − 𝑥2
⇒ 𝑥 − 𝑥2 𝑚 = 𝑦 − 𝑦2 ⇒ 𝑚𝑥 − 𝑚𝑥2 = 𝑦 − 𝑦2⇒ 𝑦 = 𝑚𝑥 −𝑚𝑥2 + 𝑦2

Copyright©WESOLVETHEMLLC|WeSolveThem.com 27
⇒ 𝑦 = 𝑚𝑥 + 𝑦2 − 𝑚𝑥2⇒ 𝑦 = 𝑚𝑥 + 𝑦2 − 𝑚𝑥2 , setting𝑏 = 𝑦2 − 𝑚𝑥2
∴ 𝑦 = 𝑚𝑥 + 𝑏StandardorGeneralForm
𝐴𝑥 + 𝐵𝑦 = 𝐶ParallelLine(equalslopes)
𝑦r = 𝑚𝑥 + 𝑏r ∥ 𝑦q = 𝑚𝑥 + 𝑏qPerpendicularLine(productofslopesare-1)
𝑦r = 𝑚𝑥 + 𝑏r ⊥ 𝑦q = −1𝑚𝑥 + 𝑏q
*DomainRestrictionsForthefollowing,𝑓 𝑥 , 𝑔 𝑥 , ℎ 𝑥 areassumedtobecontinuousforallrealnumbers.Polynomial 𝑥 = 𝑎2𝑥0 ± 𝑎r𝑥0pr ± 𝑎q𝑥0pq ± ⋯± 𝑎0𝑥0p0 NoRestrictions
Fraction
ℎ 𝑥 =𝑓 𝑥𝑔 𝑥
𝒈 𝒙 ≠ 𝟎
Radical,ifniseven
𝑓 𝑥 = 𝑔(𝑥)� 𝒈 𝒙 ≥ 𝟎
Radical,ifnisodd
𝑓 𝑥 = 𝑔(𝑥)� NoRestrictions
FractionwithRadicalindenominator
ℎ 𝑥 =𝑓 𝑥𝑔 𝑥�
𝐈𝐟𝐧𝐢𝐬𝐞𝐯𝐞𝐧𝒈 𝒙> 𝟎𝐢𝐟𝐧𝐢𝐬𝐨𝐝𝐝𝒈 𝒙≠ 𝟎
NaturalLog
𝑓 𝑥 = ln 𝑔 𝑥 𝒈 𝒙 > 𝟎
Exponential
ℎ(𝑥) = 𝑓 𝑥 È � 𝐍𝐨𝐑𝐞𝐬𝐭𝐫𝐢𝐜𝐭𝐢𝐨𝐧𝐬
InverseFunctions𝑦 = 𝑓 𝑥 ⇒ 𝑥 = 𝑓 𝑦pr = 𝑓 𝑓pr 𝑥 If𝑓 𝑥 isone-to-oneithasaninverseThedomainof𝑓 𝑥 istherangeof𝑓pr 𝑥 Therangeof𝑓 𝑥 isthedomainof𝑓pr 𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com28
𝑦 = 𝑓 𝑥 ⇒ 𝑥 = 𝑓 𝑦 ⇒ 𝑦 = 𝑓pr 𝑥 Asymptotes,HolesandGraphs
Anasymptoteoccurswherethefunctionisgettinginfinitelyclosetoalineonthegraphbutnevertouchestheline.Horizontalasymptotesmaycrossthelinefromtime-to-time;itistheendbehaviorweareconcernedwith.Therearethreetypesofasymptotes:Horizontal,VerticalandOblique.Obliqueasymptotes,willmostlikely,notbeusedinyourcalculuscoursebutverticalandhorizontalwillbeusedfrequentlyinordertographfunctions.HoleinaGraph 𝑓 𝑥 =
𝑥q − 4𝑥 − 2 ⇒ 𝑥 ≠ 2
ThreeGeneralCasesforHorizontalAsymptotesSincetherearesomanyconditionsandsituationsforasymptotesandthemethodslearnedinalgebraaresominimaltowhatisusedincalculus,wewillcomebacktothislater.Case1
𝑓 𝑥 =𝑥� + 𝑥�pr + ⋯𝑥0 + 𝑥0pr + ⋯
𝑛 > 𝑚 ⇒ 𝐻𝐴:𝑦 = 0
Case2𝑓 𝑥 =
𝑥� + 𝑥�pr + ⋯𝑥0 + 𝑥0pr + ⋯
𝑛 < 𝑚 ⇒ 𝐻𝐴:𝑛𝑜𝑛𝑒
Case3𝑓 𝑥 =
a𝑥� + 𝑥�pr + ⋯b𝑥0 + 𝑥0pr + ⋯ 𝑛 = 𝑚 ⇒ 𝐻𝐴:𝑦 =
𝑎𝑏
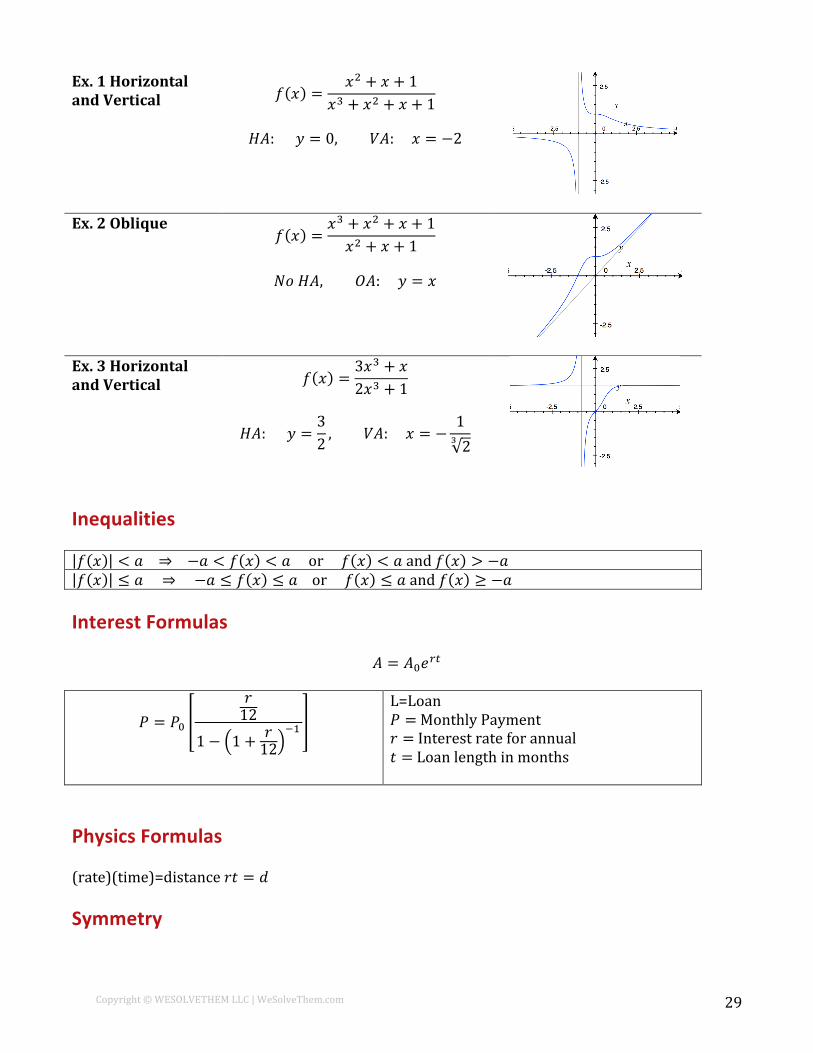
Copyright©WESOLVETHEMLLC|WeSolveThem.com 29
Ex.1HorizontalandVertical 𝑓 𝑥 =
𝑥q + 𝑥 + 1𝑥o + 𝑥q + 𝑥 + 1
𝐻𝐴:𝑦 = 0, 𝑉𝐴:𝑥 = −2
Ex.2Oblique𝑓 𝑥 =
𝑥o + 𝑥q + 𝑥 + 1𝑥q + 𝑥 + 1
𝑁𝑜𝐻𝐴, 𝑂𝐴:𝑦 = 𝑥
Ex.3HorizontalandVertical 𝑓 𝑥 =
3𝑥o + 𝑥2𝑥o + 1
𝐻𝐴:𝑦 =32 , 𝑉𝐴:𝑥 = −
12Ó
Inequalities𝑓 𝑥 < 𝑎 ⇒ −𝑎 < 𝑓 𝑥 < 𝑎or𝑓 𝑥 < 𝑎and𝑓 𝑥 > −𝑎𝑓 𝑥 ≤ 𝑎 ⇒ −𝑎 ≤ 𝑓 𝑥 ≤ 𝑎or𝑓 𝑥 ≤ 𝑎and𝑓 𝑥 ≥ −𝑎InterestFormulas
𝐴 = 𝐴2𝑒Ô©
𝑃 = 𝑃2
𝑟12
1 − 1 + 𝑟12
pr L=Loan𝑃 =MonthlyPayment𝑟 =Interestrateforannual𝑡 =Loanlengthinmonths
PhysicsFormulas(rate)(time)=distance𝑟𝑡 = 𝑑Symmetry

Copyright©WESOLVETHEMLLC|WeSolveThem.com30
ByPoint𝑥-axis Foreverypoint 𝑥, 𝑦 thereisa 𝑥,−𝑦 𝑦-axis Foreverypoint 𝑥, 𝑦 thereisa −𝑥, 𝑦 origin Foreverypoint 𝑥, 𝑦 thereisa −𝑥,−𝑦 Testing𝑥-axis:Replaceeach𝑦witha– 𝑦,ifthesameequationresults,itissymmetric.𝑦-axis:Replaceeach𝑥witha– 𝑥,ifthesameequationresults,itissymmetric.Origin:Replaceeach𝑥, 𝑦witha−𝑥, – 𝑦,ifthesameequationresults,itissymmetric.Variations(Proportionality)𝑘istheconstantofproportionality
𝑦isproportionaltox:y=𝑘𝑥
𝑦isinverselyproportionalto𝑥:𝑦 = Ö
�
CommonGraphsandFormulas
𝑦 = 𝑥q𝑦 = 𝑥o
_________________________________________________________________________________________________________
𝑦 = 𝑥𝑦 =1𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 31
_________________________________________________________________________________________________________
𝑦 = 𝑒�𝑦 = ln 𝑥
_________________________________________________________________________________________________________
𝑥q + 𝑦q = 1𝑥q − 𝑦q = 1
_________________________________________________________________________________________________________
𝑦q − 𝑥q = 1𝑦 = 𝑥q − 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com32

Copyright©WESOLVETHEMLLC|WeSolveThem.com 33
EquationofaLine
𝑠𝑙𝑜𝑝𝑒 = 𝑚 =𝑦q − 𝑦r𝑥q − 𝑥r
𝑦 = 𝑚𝑥 + 𝑏
𝑦q − 𝑦r = 𝑚 𝑥q − 𝑥r
𝐴𝑥 + 𝐵𝑦 = 𝐶
EquationofParabola
Vertex: ℎ, 𝑘 = − �q�, 𝑓 − �
q�
𝑦 = 𝑎𝑥q + 𝑏𝑥 + 𝑐
𝑦 = 𝑎 𝑥 − ℎ q + 𝑘
EquationofCircleCenter: ℎ, 𝑘 Radius:𝑟
𝑥q + 𝑦q + 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0 ⇒
𝑥 − ℎ q + 𝑦 − 𝑘 q = 𝑟q
EquationofEllipse
RightPoint: ℎ + 𝑎, 𝑘
LeftPoint: ℎ − 𝑎, 𝑘
TopPoint: ℎ, 𝑘 + 𝑏
BottomPoint: ℎ, 𝑘 − 𝑏
𝑥 − ℎ q
𝑎q +𝑦 − 𝑘 q
𝑏q = 1
EquationofHyperbola(1)Center: ℎ, 𝑘 Slope:± �
�
Asymptotes:𝑦 = ± ��𝑥 − ℎ + 𝑘
Vertices: ℎ + 𝑎, 𝑘 , ℎ − 𝑎, 𝑘
𝑥 − ℎ q
𝑎q −𝑦 − 𝑘 q
𝑏q = 1
EquationofHyperbola(2)Center: ℎ, 𝑘 Slope:± �
�
Asymptotes:𝑦 = ± ��𝑥 − ℎ + 𝑘
Vertices: ℎ, 𝑘 + 𝑏 , ℎ, 𝑘 − 𝑏
𝑦 − 𝑘 q
𝑎q −𝑥 − ℎ q
𝑏q = 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com34
AreasSquare:𝐴 = 𝐿q = 𝑊qRectangle:𝐴 = 𝐿 ∙ 𝑊Circle:𝐴 = 𝜋 ∙ 𝑟qEllipse:𝐴 = 𝜋 ∙ 𝑎𝑏Triangle:𝐴 = r
q𝑏 ∙ ℎTrapezoid:𝐴 = r
q𝑎 + 𝑏 ∙ ℎ
Parallelogram:𝑏 ∙ ℎRhombus:𝐴 = ÙÚ
q,𝑝and𝑞arethediagonals
SurfaceAreas
Cube:𝐴Û = 6𝐿q = 6𝑊qBox:𝐴Û = 2(𝐿𝑊 +𝑊𝐻 +𝐻𝐿)Sphere:𝐴Û = 4𝜋𝑟qCone:𝐴Û = 𝜋𝑟 𝑟 + ℎq + 𝑟q Cylinder:2𝜋𝑟ℎ + 2𝜋𝑟q
VolumesCube:𝑉 = 𝐿o = 𝑊oBox:𝑉 = 𝐿 ∙ 𝑊 ∙ 𝐻Sphere:𝑉 = Ü
o𝜋 ∙ 𝑟o
Cone:𝑉 = r
o𝜋 ∙ 𝑟qℎEllipsoid:𝑉 = Ü
o𝜋 ∙ 𝑎𝑏𝑐,𝑎, 𝑏, 𝑐aretheradii
BusinessFunctionsCostFunction𝐶 𝑥
RevenueFunction𝑅 𝑥
ProfitFunction𝑃 𝑥 = 𝑅 𝑥 − 𝐶 𝑥
MarginalCostFunction𝐶Þ 𝑥
MarginalRevenueFunction𝑅Þ 𝑥
MarginalProfitFunction𝑃Þ 𝑥 = 𝑅Þ 𝑥 =𝐶Þ 𝑥
AverageCostFunction 𝐶 𝑥 =
𝐶 𝑥𝑥
AverageRevenueFunction𝑅 𝑥 = ß �
�
AverageProfitFunction𝑃 𝑥 = à �
�= ß � pá �
�

Copyright©WESOLVETHEMLLC|WeSolveThem.com 35
AverageRateofChangeof𝒇andSlopeofSecantLine
â¦â�= ² � p² �
�p�= 𝑚Û¤��0©from𝑃r(𝑎, 𝑓 𝑎 )and𝑃q 𝑏, 𝑓 𝑏
DifferenceQuotient𝑚Û¤��0© =
² â���³ p² �³â�
,𝛥𝑥 = ℎ ⇒ 𝑚Û¤��0© =² ��ã p² �
ã, ℎ ≠ 0
FunctionsConstantFunction 𝑦 = 𝑐IdentityFunction 𝑦 = 𝑥SquareFunction 𝑦 = 𝑥qCubeFunction 𝑦 = 𝑥oSquareRootFunction 𝑦 = 𝑥CubeRootFunction 𝑦 = 𝑥Ó ReciprocalFunction 𝑦 =
1𝑥
AbsoluteValueFunction 𝑦 = 𝑥 GreatestIntegerFunction 𝑦 = int 𝑥 ∗PiecewiseFunction 𝑓 𝑥 = 𝑔 𝑥 , 𝑥 ∈ 𝐷r
ℎ 𝑥 , 𝑥 ∈ 𝐷q
PowerFunction 𝑦 = 𝑎𝑥0RationFunction
𝑓 𝑥 =𝑔 𝑥ℎ 𝑥 , ℎ 𝑥 ≠ 0
GraphShiftsandCompressionsVerticallyupfor𝑓 𝑥 𝑓 𝑥 + 𝑘Verticallydownfor𝑓 𝑥 𝑓 𝑥 − 𝑘Horizontallyleftfor𝑓 𝑥 𝑓 𝑥 + ℎ Horizontallyrightfor𝑓 𝑥 𝑓 𝑥 − ℎ 𝑎𝑓 𝑥 multiplyeachy-coordinatebyaVerticallyCompressed:0 < 𝑎 < 1VerticallyStretched:𝑎 > 1
𝑥, 𝑎𝑦
𝑓 𝑎𝑥 Multiplyeachx-coordinatebyr�
HorizontalCompression:𝑎 > 1HorizontalStretch:0 < 𝑎 < 1
1𝑎 𝑥, 𝑦
Reflectionaboutx-axis −𝑓 𝑥 Reflectionabouty-axis 𝑓 −𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com36
Systemsofequations
𝑎𝑥 + 𝑏𝑦 = 𝑒𝑐𝑥 + 𝑑𝑦 = 𝑓 ⇒ 𝑎 𝑏
𝑐 𝑑𝑥𝑦 =
𝑒𝑓 ⇒ 𝑎 𝑏
𝑐 𝑑𝑒𝑓
𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑𝑒𝑥 + 𝑓𝑦 + 𝑔𝑦 = ℎ𝑖𝑥 + 𝑗𝑦 + 𝑘𝑧 = 𝑙
⇒ 𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
𝑥𝑦𝑧=
𝑑ℎ𝑙⇒
𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
𝑑ℎ𝑙
TheCoefficientMatrix=𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
Rankofmatrixandpivots
𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴r = 1
𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴ç = 1
𝟏1 , 𝑟𝑎𝑛𝑘 𝐴q = 1
𝟏0 , 𝑟𝑎𝑛𝑘 𝐴è = 1
𝟏 1 1 , 𝑟𝑎𝑛𝑘 𝐴o = 1
𝟏 1 1 , 𝑟𝑎𝑛𝑘 𝐴r2 = 1
𝟏11, 𝑟𝑎𝑛𝑘 𝐴Ü = 1
𝟏00, 𝑟𝑎𝑛𝑘 𝐴rr = 1
𝟏 00 𝟏 , 𝑟𝑎𝑛𝑘 𝐴é = 2
𝟏 1 11 1 11 1 1
, 𝑟𝑎𝑛𝑘 𝐴rq = 1
𝟏 0 00 𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴ê = 2
𝟏 1 11 1 −𝟏1 1 1
, 𝑟𝑎𝑛𝑘 𝐴ro = 2
𝟏 00 00 𝟏
, 𝑟𝑎𝑛𝑘 𝐴ë = 2
𝟏 1 10 𝟏 10 0 𝟏
, 𝑟𝑎𝑛𝑘 𝐴rÜ = 3

Copyright©WESOLVETHEMLLC|WeSolveThem.com 37
Determinate’sofa(2x2)matrixVariouswaystocheckdeterminant(2x2):
𝐴 = 𝑎 𝑏
𝑐 𝑑 ⇒ det 𝐴 = 𝐴 = 𝑎 𝑏𝑐 𝑑 = 𝑎 𝑑 − 𝑏 𝑐
𝐴 = 𝑎 𝑏
0 𝑐 ⇒ det 𝐴 = 𝐴 = 𝑎 𝑏0 𝑐 = 𝑎 𝑐
𝐴 = 𝑎 0
0 𝑏 ⇒ det 𝐴 = 𝐴 = 𝑎 00 𝑏 = 𝑎 𝑏
Determinateofa(3x3)andhighermatricesCofactorExpansionNote:
𝑎 𝑏𝑐 𝑑 = 𝑎 𝑑 − 𝑏 𝑐
𝑎 𝑏 𝑐𝑑 𝑒 𝑓𝑔 ℎ 𝑖
= +𝑎 𝑒 𝑓ℎ 𝑖
− 𝑏 𝑑 𝑓𝑔 𝑖 + 𝑐 𝑑 𝑒
𝑔 ℎ
𝑎 𝑏𝑒 𝑓
𝑐 𝑑𝑔 ℎ
𝑖 𝑗𝑚 𝑛
𝑘 𝑙𝑜 𝑝
= +𝑎𝑓 𝑔 ℎ𝑗 𝑘 𝑙𝑛 𝑜 𝑝
− 𝑏𝑒 𝑔 ℎ𝑖 𝑘 𝑙𝑚 0 𝑝
+ 𝑐𝑒 𝑓 ℎ𝑖 𝑗 𝑙𝑚 𝑛 𝑝
− 𝑑𝑒 𝑓 𝑔𝑖 𝑗 𝑘𝑚 𝑛 𝑜

Copyright©WESOLVETHEMLLC|WeSolveThem.com38
TRIGONOMETRYIntrigonometry,muchislearned,buttobeeffectiveinCalculus,thereisonlyasmallportionoftrigonometrythatmustbemasteredandmemorizedinordertosolveproblems.Mainly:howtoevaluatetheunitcircle,righttriangles,performtrigonometricsubstitutionsandafewothers.Forthisportionofthebookwewillfocusonthesetopics.
*Note:
cospr 𝜃 = arccos 𝜃 ≠1
cos 𝜃 , cos 𝜃 pr =1
cos 𝜃 = sec 𝜃 ≠ cospr 𝜃
Thisisacommonreasonwhy arccos θ pronouncedarccosine isusedinplaceof cospr θ (pronouncedcosineinverse)
Thisistrueforallfunctionsandoperatorsi.e.𝑓pr 𝑥 istheinverseof𝑓where 𝑓 𝑥 pristhereciprocalof𝑓i.e. 𝑓 𝑥 pr = r
² �
RadianandDegreeConversion
𝜃îïðñïï = 𝜃ñòîóò¯180°
𝜋 𝜃ñòîóò¯ = 𝜃îïðñïï𝜋
180°
i. e.
𝜃îïðñïï = 45° ⇒ 𝜃ñòîóò¯ = 45°𝜋
180° =45180 (1°p°)𝜋 =
14 12 𝜋 =
𝜋4
Noticethatthedegreecancelsoutjustlikeavariableandthattheabsenceofthedegree
symbolsimpliesradians.
𝜃ñòîóò¯ =𝜋4 ⇒ 𝜃îïðñïï =
𝜋4
180°
𝜋 =1804
° 𝜋𝜋 = 45° 1 = 45°

Copyright©WESOLVETHEMLLC|WeSolveThem.com 39
BasicGraphs
𝑦 = sin 𝑥 𝑦 = cos 𝑥
_________________________________________________________________________________________________________________
_
𝑦 = csc 𝑥 𝑦 = sec 𝑥
_________________________________________________________________________________________________________________
_
𝑦 = tan 𝑥 𝑦 = cot 𝑥
_________________________________________________________________________________________________________________
_
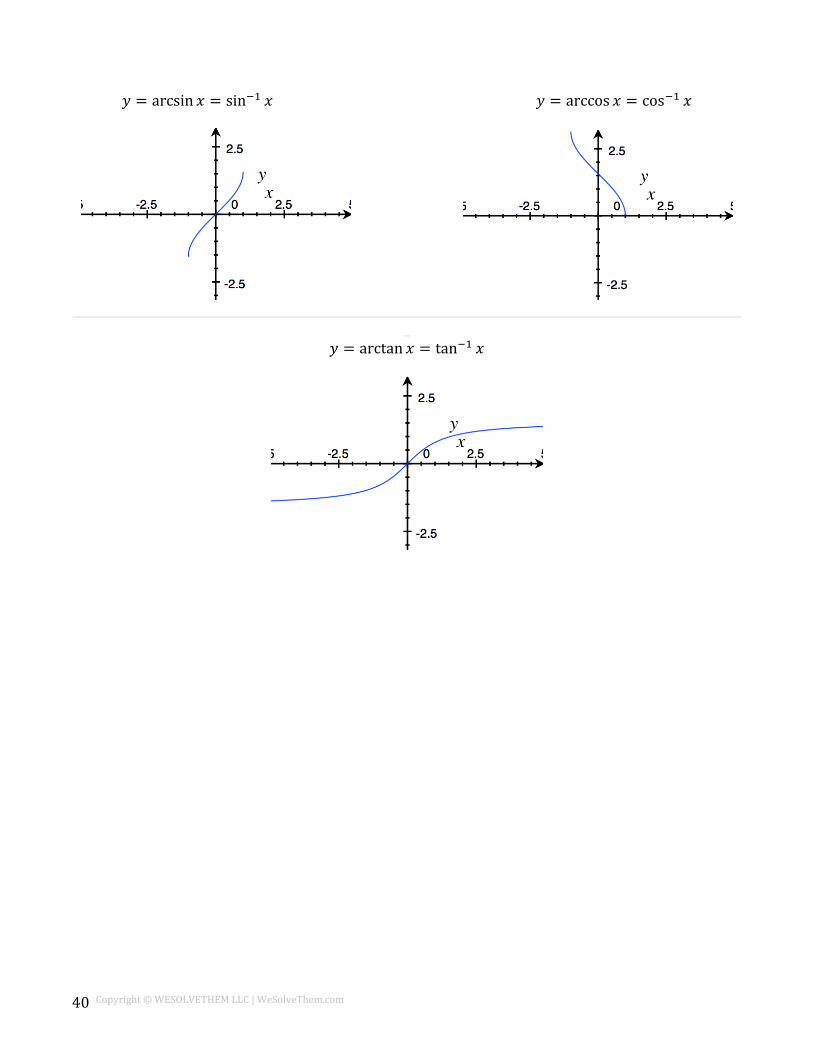
Copyright©WESOLVETHEMLLC|WeSolveThem.com40
𝑦 = arcsin 𝑥 = sinpr 𝑥 𝑦 = arccos 𝑥 = cospr 𝑥
_________________________________________________________________________________________________________________
_𝑦 = arctan 𝑥 = tanpr 𝑥
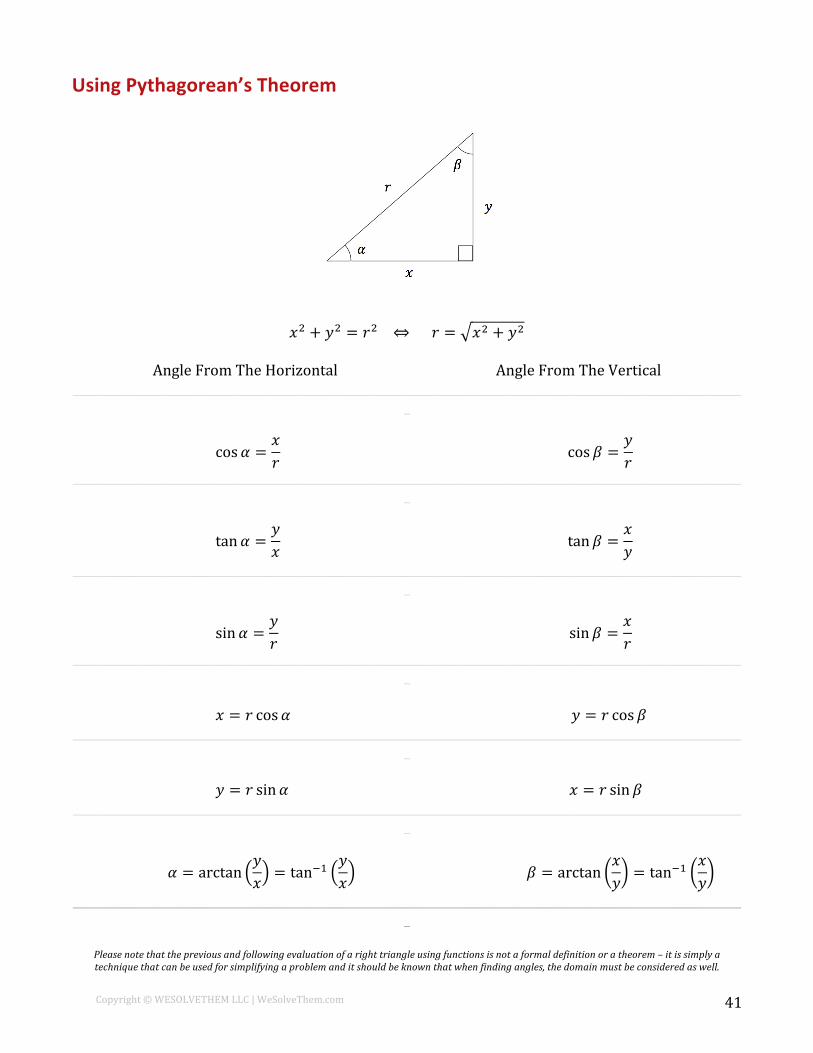
Copyright©WESOLVETHEMLLC|WeSolveThem.com 41
UsingPythagorean’sTheorem
𝑥q + 𝑦q = 𝑟q ⇔ 𝑟 = 𝑥q + 𝑦q
AngleFromTheHorizontalAngleFromTheVertical_________________________________________________________________________________________________________________
_
cos 𝛼 =𝑥𝑟 cos 𝛽 =
𝑦𝑟
__________________________________________________________________________________________________________________
tan 𝛼 =
𝑦𝑥 tan 𝛽 =
𝑥𝑦
__________________________________________________________________________________________________________________
sin 𝛼 =
𝑦𝑟 sin 𝛽 =
𝑥𝑟
__________________________________________________________________________________________________________________
𝑥 = 𝑟 cos 𝛼 𝑦 = 𝑟 cos 𝛽
__________________________________________________________________________________________________________________
𝑦 = 𝑟 sin 𝛼 𝑥 = 𝑟 sin 𝛽
__________________________________________________________________________________________________________________
𝛼 = arctan
𝑦𝑥 = tanpr
𝑦𝑥 𝛽 = arctan
𝑥𝑦 = tanpr
𝑥𝑦
__________________________________________________________________________________________________________________
Pleasenotethatthepreviousandfollowingevaluationofarighttriangleusingfunctionsisnotaformaldefinitionoratheorem–itissimplyatechniquethatcanbeusedforsimplifyingaproblemanditshouldbeknownthatwhenfindingangles,thedomainmustbeconsideredaswell.

Copyright©WESOLVETHEMLLC|WeSolveThem.com42
𝑓 𝑥 q + 𝑔 𝑥 q = ℎ 𝑥 q
AngleFromTheHorizontalAngleFromTheVertical_________________________________________________________________________________________________________________
_
cos 𝛼 =𝑓 𝑥ℎ 𝑥 cos 𝛽 =
𝑔 𝑥ℎ 𝑥
__________________________________________________________________________________________________________________
sin 𝛼 =𝑔 𝑥ℎ 𝑥 sin 𝛽 =
𝑓 𝑥ℎ 𝑥
__________________________________________________________________________________________________________________
tan 𝛼 =𝑔 𝑥𝑓 𝑥 tan 𝛽
𝑓 𝑥𝑔 𝑥
__________________________________________________________________________________________________________________
α = arctan𝑔 𝑥𝑓 𝑥 𝛽 = arctan
𝑓 𝑥𝑔 𝑥
__________________________________________________________________________________________________________________
𝑓 𝑥 = ℎ 𝑥 cos 𝛼 𝑔 𝑥 = ℎ 𝑥 cos 𝛽
__________________________________________________________________________________________________________________
𝑔 𝑥 = ℎ 𝑥 sin 𝛼 𝑓 𝑥 = h x sin 𝛽

Copyright©WESOLVETHEMLLC|WeSolveThem.com 43
________________________________________________________________________________________________________________
*IMPORTANT:Makesureeverythingaboutevaluatingrighttriangles,theunitcircleandtrigonometricidentitiesisfullyunderstoodasthiswillbeusedindetailthroughoutCalculusand
Physics.
TrigonometricFormulasandIdentities
Becausetherearequiteafewtrigonometricformulasandidentitiesanditisquitedifficulttomemorizeallofthem,itisextremelyimportanttounderstandhowtoderivetheseformulasand
identitiesfromknownformulasandidentities.
Whenworkingincalculusonewillfrequentlyreplaceatrigonometricstatementwithanothertrigonometricstatement.Thisisoneofthemostdifficultpartsofcalculusforpeopletograsp,itisnotbecauseitishard,itisbecausestudentsflythroughtrigonometryandneverreallyunderstandwhattheyweredoinganddonothaveenoughpracticewithsymbolrecognitionforreplacement.
ReciprocalIdentities
sin 𝜃 =1
csc 𝜃 csc 𝜃 =1
sin 𝜃 tan 𝜃 =1
cot 𝜃
csc 𝜃 =1
sec 𝜃 sec 𝜃 =1
cos 𝜃 cot 𝜃 =1
tan 𝜃
tan 𝜃 =sin 𝜃cos 𝜃 cot 𝜃 =
cos 𝜃sin 𝜃
Important:Thisisagoodplacetostartgettingacquaintedwithhowtousetrig-substitution,asthiswillappearfrequentlythroughoutcalculus.
tan 𝜃 =sin 𝜃cos 𝜃 = sin 𝜃
1cos 𝜃 ⇒ sin 𝜃
1cos 𝜃 = sin 𝜃 sec 𝜃
⇒ sin 𝜃 sec 𝜃 =1
csc 𝜃 sec 𝜃 ⇒ 1
csc 𝜃 sec 𝜃 =sec 𝜃csc 𝜃
tan 𝜃 =sec 𝜃csc 𝜃 ⇒ tan 𝜃 q =
sec 𝜃csc 𝜃
q
⇒ tanq 𝜃 =secq 𝜃cscq 𝜃 =
tanq 𝜃 + 11 + cotq 𝜃
Asseeninthepreviousexamples,thepossibilitiesfortrig-substitutionareendless.Often,in
calculus,onejusthastokeeptryingdifferentformsuntilaformthatworksisfound.

Copyright©WESOLVETHEMLLC|WeSolveThem.com44
PythagoreanIdentities
Oftenstudentscannotrememberalltheidentitiesbutwithsinq 𝜃 + cosq 𝜃 = 1andafewsimple
concepts,alltheidentitiescaneasilybefound.
Derivationsinq 𝜃 + cosq 𝜃 = 1:
𝑥 = 𝑟 cos 𝜃 , 𝑦 = 𝑟 sin 𝜃 , 𝑥q + 𝑦q = 𝑟q
𝑥q + 𝑦q = 𝑟 cos 𝜃 q + 𝑟 sin 𝜃 q = 𝑟q cosq 𝜃 + 𝑟q sinq 𝜃
= 𝑟q cosq 𝜃 + sinq 𝜃 = 𝑟q 1 = 𝑟q
∴ 𝑥q + 𝑦q = 𝑟q
__________________________________________________________________________________________________________________
Derivationfortanq 𝜃 + 1 = secq 𝜃:
1cosq 𝜃 sinq 𝜃 + cosq 𝜃 = 1 ⇒
sinq 𝜃cosq 𝜃 +
cosq 𝜃cosq 𝜃 =
1cosq 𝜃 ⇒
sin 𝜃cos 𝜃
q
+ 1 =1
cos 𝜃
q
∴ tanq 𝜃 + 1 = secq 𝜃_________________________________________________________________________________________________________________
_
Derivationfor1 + cotq 𝜃 = cscq 𝜃:
1sinq 𝜃 sinq 𝜃 + cosq 𝜃 = 1 ⇒
sinq 𝜃sinq 𝜃 +
cosq 𝜃sinq 𝜃 =
1sinq 𝜃 ⇒ 1 +
cos 𝜃sin 𝜃
q
=1
sin 𝜃
q
∴ 1 + cotq 𝜃 = cscq 𝜃
EvenandOddFunctions
Even ⇔ 𝑓 −𝑥 = 𝑓 𝑥
Odd ⇔ 𝑓 −𝑥 = −𝑓 𝑥
Odd sin −𝜃 = −sin 𝜃
Even cos −𝜃 = cos 𝜃

Copyright©WESOLVETHEMLLC|WeSolveThem.com 45
Odd tan −𝜃 = − tan 𝜃
Odd csc −𝜃 = −csc 𝜃
Even sec −𝜃 = sec 𝜃
Odd cot 𝜃 = −cot 𝜃
Example
TheremaybeatimeinCalculusi.e.IntegralCalculusortowardstheendofthefirstsemesterofCalculusorduringthesecondsemester,depending…Youwillneedtobeabletoeasilyidentifyan
oddfunction.Hereisanexamplewhenthismaybenecessary:
sin 𝑥 cos 𝑥ln |𝑥| − sinq 𝑒�
q
pq𝑑𝑥
Thisiscalleda‘DefiniteIntegral,’trynotbescaredofit,itisactuallyquitesimpletoevaluateinthiscasebecause 𝑓 𝑥�
p� 𝑑𝑥 = 0if𝑓 𝑥 isanoddfunction.Wemustnowshow𝑓 𝑥 isanoddfunction.
𝑓 𝑥 =sin 𝑥 cos 𝑥ln 𝑥 − sinq 𝑒� ⇒ 𝑓 −𝑥 =
sin −𝑥 cos −𝑥ln −𝑥 − sinq 𝑒 p� �
sin −𝑥 = −sin 𝑥 𝑜𝑑𝑑
cos −𝑥 = cos 𝑥 𝑒𝑣𝑒𝑛
ln −𝑥 = ln 𝑥 𝑒𝑣𝑒𝑛
sinq 𝑒 p� � = sinq 𝑒�� 𝑒𝑣𝑒𝑛
Plugeverythingbackin
∴ 𝑓 −𝑥 = −sin 𝑥 cos 𝑥ln 𝑥 − sinq 𝑒� = −𝑓 𝑥
Inotherwords,inordertoshowafunctionisodd,simplypluganegativesigninwitheveryxandthenevaluateeachindividualfunctionandseeifyouhaveanevenoroddnumberofnegative
signs.

Copyright©WESOLVETHEMLLC|WeSolveThem.com46
DoubleAngleFormulas
*Important
ThehalfangleanddoubleangleformulasalongwiththePythagoreanidentitiesareusedfrequentlythroughout
calculus.Itisamustthatyoumemorizetheunderstandingandderivationsisfullycomprehended.
Foradetailedlistofallidentities,seethereferencesheetsinthebackofthebook.
Derivationforsin 2𝜃 = 2 sin 𝜃 cos 𝜃:
sin 2𝜃 = sin 𝜃 + 𝜃 = sin 𝜃 cos 𝜃 + sin 𝜃 cos 𝜃 = 2 sin 𝜃 cos 𝜃_________________________________________________________________________________________________________________
_
Derivationforcos 2𝜃 = 1 − 2 sinq 𝜃:
cos(2𝜃) = cosq 𝜃 − sinq 𝜃 = 2 cosq 𝜃 − 1 = 1 − 2 sinq 𝜃_________________________________________________________________________________________________________________
_
Asonecansee,theseformulasareallderivedfromthePythagoreanidentitiesandtherearemanywaystofindthem.Ifthiscanbeunderstoodproperlythenmemorizingthemisnotentirelynecessary.
OtherDerivations:
cos 2𝜃 = cos(𝜃 + 𝜃) = cos 𝜃 cos 𝜃 − sin 𝜃 sin 𝜃 = cosq 𝜃 − sinq 𝜃
__________________________________________________________________________________________________________________
cos 2𝜃 = cos(𝜃 + 𝜃) = cos 𝜃 cos 𝜃 − sin 𝜃 sin 𝜃 = cosq 𝜃 − sinq 𝜃 = cosq 𝜃 − (1 − cosq 𝜃)
= cosq −1 + cosq 𝜃 = 2 cosq 𝜃 − 1
__________________________________________________________________________________________________________________
cos 2𝜃 = cos(𝜃 + 𝜃) = cos 𝜃 cos 𝜃 − sin 𝜃 sin 𝜃 = cosq 𝜃 − sinq 𝜃
= 1 − sinq 𝜃 − sinq 𝜃 = 1 − 2 sinq 𝜃
__________________________________________________________________________________________________________________
tan 2𝜃 = tan 𝜃 + 𝜃 =tan 𝜃 + tan 𝜃1 − tan 𝜃 tan 𝜃 =
2 tan 𝜃1 − tanq 𝜃

Copyright©WESOLVETHEMLLC|WeSolveThem.com 47
HalfAngleFormulas
sinq 𝜃 =12 1 − cos 2𝜃
Derivation:
sinq 𝜃 = 1 − cosq 𝜃 = 1 − cos 𝜃 cos 𝜃 = 1 −12 cos 𝜃 − 𝜃 + cos 𝜃 + 𝜃
= 1 −12 cos 0 + cos 2𝜃 = 1 −
12 1 + cos 2𝜃 = 1 −
12 −
12 cos 2𝜃
=12 −
12 cos 2𝜃 =
12 [1 − cos(2𝜃)]
__________________________________________________________________________________________________________________
cosq 𝜃 =12 [1 + 𝑐𝑜𝑠 2𝜃 ]
Derivation:
cosq 𝜃 = 1 − sinq 𝜃 = 1 − sin 𝜃 sin 𝜃 = 1 −12 cos(𝜃 − 𝜃 − cos 𝜃 + 𝜃 ]
= 1 −12 cos 0 − cos 2𝜃 = 1 −
12 1 − cos 2𝜃 = 1 −
12 +
12 cos 2𝜃
=12 +
12 cos 2𝜃 =
12 1 + cos 2𝜃
__________________________________________________________________________________________________________________
tanq 𝜃 =1 − cos(2𝜃)1 + cos(2𝜃)
Derivation:
tanq 𝜃 = secq 𝜃 − 1 =1
cos 𝜃
q
− 1 =1
cos 𝜃 cos 𝜃 − 1 =1
12 cos 𝜃 − 𝜃 + cos 𝜃 + 𝜃
− 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com48
=2
1 + cos 2𝜃 − 1 =2
1 + cos 2𝜃 −1 + cos 2𝜃1 + cos 2𝜃 =
2 − 1 + cos 2𝜃1 + cos 2𝜃 =
1 − cos 2𝜃1 + cos 2𝜃
SumandDifferenceFormulas
sin 𝛼 ± 𝛽 = sin 𝛼 cos 𝛽 ± cos 𝛼 sin 𝛽
__________________________________________________________________________________________________________________
cos(𝛼 ± 𝛽) = cos 𝛼 cos 𝛽 ∓ sin 𝛼 cos 𝛽_________________________________________________________________________________________________________________
_
tan 𝛼 ± 𝛽 =tan𝛼 ± tan𝛽1 ∓ tan𝛼 𝑡𝑎𝑛𝛽
__________________________________________________________________________________________________________________
Thederivationsofthesum&difference,producttosumandsumtoproductformulasareabitmorecomplicated.Trytoshowtheyaretruewithoutreferencinganything.Thiswillprovetobeanexcellentpractice.Remember,gettingitcorrectisnotalwaysthepointofpractice.Onemust
sometimesgointhewrongdirectiontolearnthattheyarenotontherightpath.
ProducttoSumFormulas
sin 𝛼 sin 𝛽 =12 [cos 𝛼 − 𝛽 − cos(𝛼 + 𝛽)]
__________________________________________________________________________________________________________________
cos 𝛼 cos 𝛽 =12 [cos 𝛼 − 𝛽 + cos(𝛼 + 𝛽)]
__________________________________________________________________________________________________________________
sin 𝛼 cos 𝛽 =12 [sin 𝛼 + 𝛽 + sin 𝛼 − 𝛽 ]
__________________________________________________________________________________________________________________
cos 𝛼 sin 𝛽 =12 sin 𝛼 + 𝛽 − sin 𝛼 − 𝛽

Copyright©WESOLVETHEMLLC|WeSolveThem.com 49
SumtoProductFormulas
sin 𝛼 + sin 𝛽 = 2 sin𝛼 + 𝛽2 cos
𝛼 − 𝛽2
__________________________________________________________________________________________________________________
sin 𝛼 − sin 𝛽 = 2 cos𝛼 + 𝛽2 sin
𝛼 − 𝛽2
__________________________________________________________________________________________________________________
cos 𝛼 + cos 𝛽 = 2 cos𝛼 + 𝛽2 cos
𝛼 − 𝛽2
__________________________________________________________________________________________________________________
cos 𝛼 − cos 𝛽 = −2 sin𝛼 + 𝛽2 sin
𝛼 − 𝛽2

Copyright©WESOLVETHEMLLC|WeSolveThem.com50
HyperbolicFunctions
Irarelyseehyperbolicfunctionsintheaveragecalculuscoursebuteveryonceinawhilethetopicpopsupanditseemsliketheteacherisobsessedwiththemwhenitdoes.Itisgoodtoknowhowtousethem.Nottoodifferentfromworkingwithtrigonometricoperations,justalittlemore
involved.
Notation
sinh 𝑥 =𝑒� − 𝑒p�
2 csch 𝑥 =2
𝑒� + 𝑒p�
cosh 𝑥 =𝑒� + 𝑒p�
2 sech 𝑥 =2
𝑒� + 𝑒p�
tanh 𝑥 =𝑒� − 𝑒p�
𝑒� + 𝑒p� coth 𝑥 =𝑒� + 𝑒p�
𝑒� − 𝑒p�
Graphs
sinh 𝑥 =𝑒� − 𝑒p�
2 csch 𝑥 =2
𝑒� + 𝑒p�
_

Copyright©WESOLVETHEMLLC|WeSolveThem.com 51
cosh 𝑥 =𝑒� + 𝑒p�
2 sech 𝑥 =2
𝑒� + 𝑒p�
__________________________________________________________________________________________________________________
tanh 𝑥 =𝑒� − 𝑒p�
𝑒� + 𝑒p� coth 𝑥 =𝑒� + 𝑒p�
𝑒� − 𝑒p�
Identities
sinh −𝑥 = −sinh 𝑥 cosh −𝑥 = cosh 𝑥
coshq 𝑥 − sinhq 𝑥 = 11 − tanhq 𝑥 = sechq 𝑥
sinh 𝑥 + 𝑦 = sinh 𝑥 cosh 𝑦 + cosh 𝑥 sinh 𝑦
cosh 𝑥 + 𝑦 = cosh 𝑥 cosh 𝑦 + sinh 𝑥 sinh 𝑦
sinhpr 𝑥 = ln 𝑥 + 𝑥q + 1 , −∞ ≤ 𝑥 ≤∞
coshpr 𝑥 = ln 𝑥 + 𝑥q − 1 , 𝑥 ≥ 1
tanhpr 𝑥 =12 ln
1 + 𝑥1 − 𝑥 , −1 < 𝑥 < 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com52
DIFFERENTIALCALCULUS(CALCI)Translation-Thelimitoffofxasxgoestoa lim
�→�𝑓(𝑥)
fofxapproachesthelimitasxapproachesa 𝑓 𝑥 → 𝐿as𝑥 → 𝑎
NotationsforLimitsTheactuallimit lim
�→�𝑓(𝑥) = 𝐿 ⇔ 𝐿p = 𝐿�
Lefthandlimit lim�→�ü
𝑓 𝑥 = 𝐿p
Righthandlimit lim�→�ý
𝑓 𝑥 = 𝐿�
Limitexists lim�→�ü
𝑓 𝑥 = lim�→�ý
𝑓(𝑥)
Limitdoesnotexists(DNE) lim�→�ü
𝑓 𝑥 ≠ lim�→�ý
𝑓 𝑥
Continuousfunction 𝑓 𝑎 = 𝐿 = 𝐿±
LeftContinuousfunction 𝑓 𝑎 = 𝐿p
RightContinuousfunction 𝑓 𝑎 = 𝐿�
Non-continuousfunction 𝑓 𝑎 = 𝑈𝑛𝑑𝑒𝑓𝑖𝑛𝑒𝑑 ≠ 𝐿

Copyright©WESOLVETHEMLLC|WeSolveThem.com 53
TypesofDiscontinuity
Jump
Occurswithpiecewisefunctionsi.e.
𝑓 𝑥 = −𝑥,𝑥 < 1𝑥 + 1,𝑥 ≥ 1
Removable
𝑓 𝑥 =𝑥q − 4𝑥 − 2 =
𝑥 − 2 𝑥 + 2𝑥 − 2 ⇒
𝑔 𝑥 = 𝑥 + 2 ⇒ 𝑥 ≠ 2 ∵ 𝑓 2 =00
Occursatholesinthegraph
Infinite
𝑓 𝑥 =𝑥q + 𝑥 + 1
𝑥o + 𝑥q + 𝑥 + 1∴ 𝐻𝐴:𝑦 = 0, 𝑉𝐴:𝑥 = −2
Occursatasymptotes

Copyright©WESOLVETHEMLLC|WeSolveThem.com54
LimitLawsandPropertiesLimitofaConstant lim
�→�𝑐 = 𝑐
LimitofSingleVariable lim�→�
𝑥 = 𝑎
IfTheFunctionisContinuous lim�→�
𝑓(𝑥) = 𝑓(𝑎)
TheConstantMultipleLaw lim�→�
[𝑐𝑓 𝑥 ] = 𝑐 lim�→�
𝑓(𝑥)
TheSumandDifferenceLaw lim�→�
[𝑓 𝑥 ± 𝑔 𝑥 ] = lim�→�
𝑓(𝑥) ± lim�→�
𝑔(𝑥)
TheProductLaw lim�→�
[𝑓 𝑥 𝑔 𝑥 ] = lim�→�
𝑓(𝑥) ∙ lim�→�
𝑔(𝑥)
TheQuotientLawlim�→�
𝑓 𝑥𝑔 𝑥 =
lim�→�
𝑓(𝑥)
lim�→�
𝑔(𝑥) , lim�→�
𝑔(𝑥) ≠ 0
ThePowerLaw lim�→�
𝑓 𝑥 0 = lim�→�
𝑓 𝑥0, 𝑛 ∈ ℕ
TheRootLaw lim�→�
𝑓(𝑥)� = lim�→�
𝑓(𝑥)� , 𝑛 ∈ ℕ
ExponentialLaw lim�→�
𝑎² � = 𝑎®óÿ!→"² �
InfiniteLimits
Therearethreebasiccasesforevaluatingnon-trig/logfunctionsatinfinity.Thisiswherethehorizontalasymptoteformulasarise--usedinAlgebra.Case1:
lim�→∞
𝑥� + 𝑥�pr + ⋯𝑥0 + 𝑥0pr + ⋯ = 0
𝑛 > 𝑚, 𝑀𝑢𝑙𝑡𝑖𝑝𝑙𝑦𝑏𝑦𝑥−𝑛
𝑥−𝑛
Ratioofpolynomialsofdegreem&n
Case2:
lim�→∞
𝑥� + 𝑥�pr + ⋯𝑥0 + 𝑥0pr + ⋯ =∞
𝑛 < 𝑚, 𝑀𝑢𝑙𝑡𝑖𝑝𝑙𝑦𝑏𝑦𝑥−𝑛
𝑥−𝑛
Ratioofpolynomialsofdegreem&n
Case3:
lim�→∞
a𝑥� + 𝑥�pr + ⋯b𝑥0 + 𝑥0pr + ⋯ =
ab
𝑛 = 𝑚, 𝑀𝑢𝑙𝑡𝑖𝑝𝑙𝑦𝑏𝑦𝑥−𝑛
𝑥−𝑛
Ratioofpolynomialsofdegreem&n

Copyright©WESOLVETHEMLLC|WeSolveThem.com 55
PreciseDefinitionofaLimit𝜺, 𝜹Thelimitoffofxasxgoestoa lim
�→�𝑓(𝑥)
fofxapproachesthelimitasxapproachesa
𝑓 𝑥 → 𝐿as𝑥 → 𝑎
LimitForevery𝜖 > 0,thereisa𝛿 > 0suchthat0 < 𝑥 − 𝑎 < 𝛿and 𝑓 𝑥 − 𝐿 < 𝜖LeftHandLimitForevery𝜖 > 0,thereisa𝛿 > 0suchthat𝑎 − 𝛿 < 𝑥 < 𝑎and 𝑓 𝑥 − 𝐿 < 𝜖RightHandLimitForevery𝜖 > 0,thereisa𝛿 > 0suchthat𝑎 < 𝑥 < 𝑎 + 𝛿and 𝑓 𝑥 − 𝐿 < 𝜖Derivationof“TheDifferenceQuotient”
𝑚 =𝛥𝑦𝛥𝑥 ⇒
𝛥𝑦𝛥𝑥 =
𝑦 − 𝑦2𝑥 − 𝑥2
, 𝑦 = 𝑓(𝑥)
⇒𝑦 − 𝑦2𝑥 − 𝑥2
=𝑓 𝑥 − 𝑓 𝑥2
𝑥 − 𝑥2, 𝛥𝑥 = 𝑥 − 𝑥2 ⇔ 𝑥 = 𝛥𝑥 + 𝑥2
⇒𝑓 𝑥 − 𝑓(𝑥2)
𝑥 − 𝑥2=𝑓 𝛥𝑥 + 𝑥2 − 𝑓(𝑥2)
𝛥𝑥 ≡𝑓 𝑥 + ℎ − 𝑓(𝑥)
ℎ
SlopeofSecantLineorDifferenceQuotient
𝑚 =𝑓 𝑥 + ℎ − 𝑓 𝑥
ℎ ≡𝑓 𝑥 + 𝛥𝑥 − 𝑓 𝑥
𝛥𝑥 ⇔ ℎ = 𝛥𝑥
IntermediateValueTheoremIf𝑓iscontinuouson 𝑎, 𝑏 ,𝑓 𝑎 < 𝑁 < 𝑓 𝑏 and𝑓 𝑎 ≠ 𝑓 𝑏 ,thenthereisa𝑐 ∈ 𝑎, 𝑏 ∋ 𝑓 𝑐 =𝑁.(∋means“suchthat”)

Copyright©WESOLVETHEMLLC|WeSolveThem.com56
CommonLimitsInfiniteLimitslim�→∞
𝑥0 =∞, 𝑛 > 0 lim�→∞
1𝑥0 = 0 , 𝑛 > 0
lim�→∞
𝑥0 = 0, 𝑛 < 0
lim�→∞
1𝑥0 =∞, 𝑛 < 0 lim
�→∞𝑒� =∞
lim�→∞
1𝑒� = 0
lim�→∞
𝑒p� = 0 lim�→∞
1𝑒p� =∞
lim�→∞
ln 𝑥 =∞
lim�→∞
1ln 𝑥 = 0
lim�→∞
ln 𝑥pr = −∞
lim�→∞
1ln 𝑥pr = 0
lim�→∞
sin 𝑥 = −1to1, 𝐷𝑁𝐸 lim�→∞
sin1𝑥 = 0 lim
�→∞cos 𝑥 = −1to1
lim�→∞
tan 𝑥 = −∞to∞, 𝐷𝑁𝐸 lim�→∞
cos1𝑥 = 1 lim
�→∞csc 𝑥
= −∞to − 1&1to∞,DNE
lim�→∞
tan1𝑥 = 0 lim
�→∞csc
1𝑥 =∞ lim
�→∞sec 𝑥
= −∞to − 1&1to∞,DNE
lim�→∞
sec1𝑥 = 1 lim
�→∞cot 𝑥 = −∞to∞ lim
�→∞cot
1𝑥 =∞

Copyright©WESOLVETHEMLLC|WeSolveThem.com 57
DerivativesTheLimitDefinitionofaDerivative
𝑓Þ 𝑥 = limã→2
𝑓 𝑥 + ℎ − 𝑓(𝑥)ℎ ≡ lim
�→�³
𝑓 𝑥 + 𝛥𝑥 − 𝑓 𝑥𝛥𝑥 ⇔ ℎ = 𝛥𝑥
Theapostrophein𝑓Þ 𝑥 or𝑦′denotesderivative.
Notations0thDerivative 𝑦 = 𝑓 𝑥 =
𝑑𝐹𝑑𝑥 =
𝑑𝑌𝑑𝑥
1stDerivative 𝑦Þ = 𝑓Þ 𝑥 =𝑑𝑦𝑑𝑥
2ndDerivative𝑦ÞÞ = 𝑓ÞÞ 𝑥 =
𝑑q𝑦𝑑𝑦q
3rdDerivative𝑦ÞÞÞ = 𝑓ÞÞÞ 𝑥 =
𝑑o𝑦𝑑𝑦o
4thDerivative𝑦 Ü = 𝑓 Ü 𝑥 =
𝑑Ü𝑦𝑑𝑦Ü
𝑛-.Derivative 𝑦 0 = 𝑓 0 𝑥 =𝑑0𝑦𝑑𝑦0
Note:
1. Anyderivativeafterthe3rdiswrittenas𝑓(0) 𝑥 or𝑦(0)nottobeconfusedwithapower𝑦 Ü =4thderivative≠ 𝑦Ü = 𝑦 ∙ 𝑦 ∙ 𝑦 ∙ 𝑦
2. »»[… ]
iscalled“TheDerivativeOperator”itsimplymeanstotakethederivativeofwhateverfollowswithrespecttowhateverisin[…].
TimeDerivatives𝑑𝑑𝑡 𝑦 = 𝑦Þ 𝑡 = 𝑦,1/-derivativewithrespecttotime
𝑑q
𝑑𝑡q 𝑥 = 𝑥ÞÞ 𝑡 = 𝑥,2¯îderivativewithrespecttotime

Copyright©WESOLVETHEMLLC|WeSolveThem.com58
TheSlopeNotationforCalculus
𝑚 = lim�→�
𝑓 𝑥 − 𝑓 𝑎𝑥 − 𝑎 ≡ lim
ã→2
𝑓 𝑎 + ℎ − 𝑓 𝑎ℎ = 𝑚
Slopeoffunctionakaderivative:
𝑓Þ 𝑥 = limã→2
𝑓 𝑥 + ℎ − 𝑓(𝑥)ℎ
𝑦 = 𝑓 𝑥 ⇒ 𝑦2 = 𝑓 𝑥2
∴ 𝑓 𝑥 − 𝑓 𝑥2 = 𝑓Þ 𝑥 (𝑥 − 𝑥2)
TangentLine
𝑓 𝑥 , 𝑥 = 𝑎 𝑦0 = 𝑓Þ 𝑎 𝑥 − 𝑎 + 𝑓 𝑎
PhysicsNotation
𝑠 = 𝑠 𝑡 , Distance
𝑣 = 𝑣 𝑡 = 𝑠Þ = 𝑠Þ 𝑡 =𝑑𝑠𝑑𝑡 = 𝑠, 1/-DerivativeVelocity
𝑎 = 𝑎 𝑡 =𝑑𝑣𝑑𝑡 = 𝑣Þ 𝑡 = 𝑣Þ = 𝑣 =
𝑑q𝑠𝑑𝑡q = 𝑠ÞÞ 𝑡 = 𝑠ÞÞ = 𝑠, 2ndDerivativeAcceleration

Copyright©WESOLVETHEMLLC|WeSolveThem.com 59
DerivativeRules(operatornotations)DerivativeofaConstant
𝑑𝑑𝑥 𝑐 = 0
SumandDifference 𝑑𝑑𝑥 𝑓 𝑥 + 𝑔 𝑥 =
𝑑𝑑𝑥 𝑓 𝑥 +
𝑑𝑑𝑥 𝑔 𝑥
PowerRule 𝑑
𝑑𝑥 𝑥0 = 𝑛𝑥0pr
ConstantMultipleRule
𝑑𝑑𝑥 𝑐𝑓 𝑥 = 𝑐
𝑑𝑑𝑥 𝑓 𝑥
ProductRule 𝑑
𝑑𝑥 𝑓 𝑥 𝑔 𝑥 = 𝑓 𝑥𝑑𝑑𝑥 𝑔 𝑥 + 𝑔 𝑥
𝑑𝑑𝑥 𝑓 𝑥
QuotientRule 𝑑
𝑑𝑥𝑓 𝑥𝑔 𝑥 =
𝑔 𝑥 𝑑𝑑𝑥 𝑓 𝑥 − 𝑓 𝑥 𝑑
𝑑𝑥 𝑔 𝑥𝑔 𝑥 q
ChainRule
𝑑𝑑𝑥 𝑓 ∘ 𝑔 𝑥 =
𝑑𝑑𝑥 𝑓 𝑔 𝑥 =
𝑑𝑓𝑑𝑔 ⋅
𝑑𝑔𝑑𝑥 = 𝑓′ 𝑔 𝑥 ∙ 𝑔′(𝑥)
_
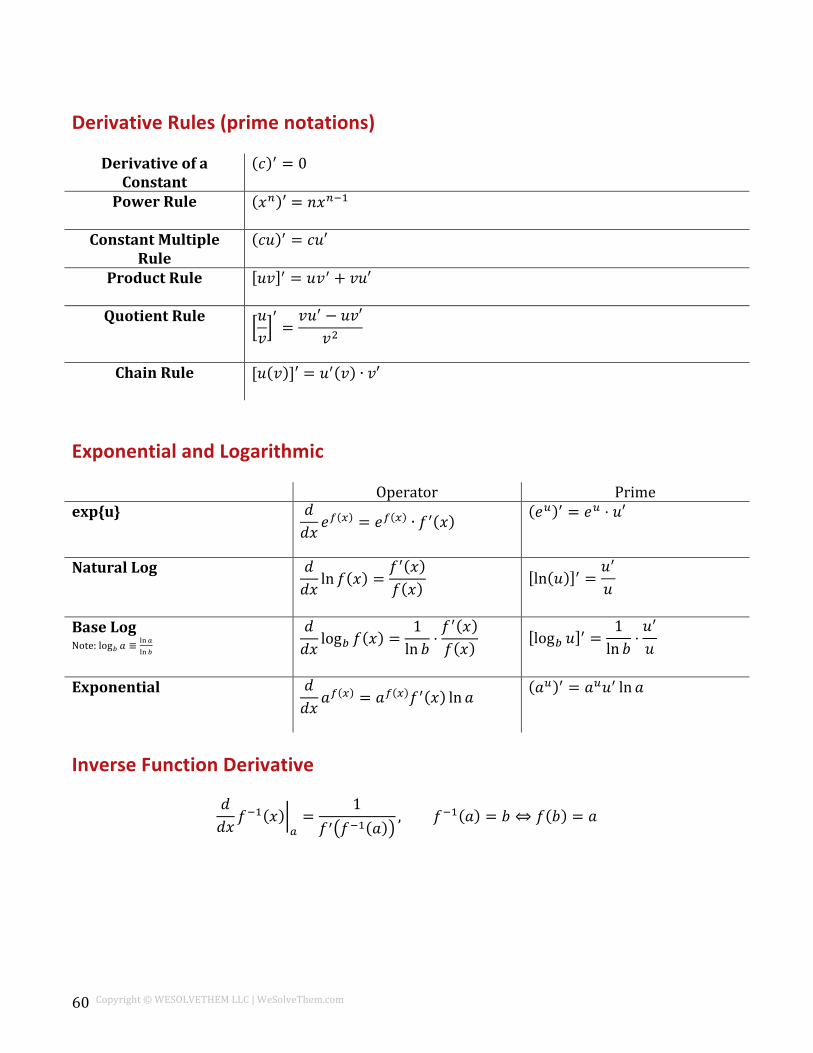
Copyright©WESOLVETHEMLLC|WeSolveThem.com60
DerivativeRules(primenotations)
DerivativeofaConstant
𝑐 Þ = 0
PowerRule 𝑥0 ′ = 𝑛𝑥0pr
ConstantMultipleRule
𝑐𝑢 Þ = 𝑐𝑢′
ProductRule 𝑢𝑣 Þ = 𝑢𝑣Þ + 𝑣𝑢′
QuotientRule
𝑢𝑣
Þ=𝑣𝑢Þ − 𝑢𝑣′
𝑣q
ChainRule
[𝑢 𝑣 ]′ = 𝑢Þ 𝑣 ∙ 𝑣′
ExponentialandLogarithmic
Operator Primeexp{u} 𝑑
𝑑𝑥 𝑒² � = 𝑒² � ∙ 𝑓Þ 𝑥
𝑒3 Þ = 𝑒3 ⋅ 𝑢′
NaturalLog 𝑑𝑑𝑥 ln 𝑓 𝑥 =
𝑓Þ 𝑥𝑓 𝑥
ln 𝑢 Þ =𝑢Þ
𝑢
BaseLogNote:log� 𝑎 ≡
®¯ �®¯ �
𝑑𝑑𝑥 log� 𝑓 𝑥 =
1ln 𝑏 ⋅
𝑓Þ 𝑥𝑓 𝑥
log� 𝑢 Þ =1ln 𝑏 ⋅
𝑢Þ
𝑢
Exponential 𝑑𝑑𝑥 𝑎
² � = 𝑎² � 𝑓Þ 𝑥 ln 𝑎
𝑎3 Þ = 𝑎3𝑢Þ ln 𝑎
InverseFunctionDerivative
𝑑𝑑𝑥 𝑓
pr 𝑥�=
1𝑓Þ 𝑓pr 𝑎
, 𝑓pr 𝑎 = 𝑏 ⇔ 𝑓 𝑏 = 𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com 61
TrigDerivativesStandard
sin 𝑢 Þ = cos 𝑢 ∙ 𝑢Þ cos 𝑢 Þ = − sin 𝑢 ∙ 𝑢Þ tan 𝑢 Þ = secq 𝑢 ∙ 𝑢Þ
csc 𝑢 Þ = − csc 𝑢 cot 𝑢 ∙ 𝑢Þ sec 𝑢 Þ = sec 𝑢 tan 𝑢 ∙ 𝑢Þ cot 𝑢 Þ = − cscq 𝑢 ∙ 𝑢′
Inverse
sinpr 𝑢 Þ =𝑢′1 − 𝑢q
cospr 𝑢 Þ = −𝑢′1 − 𝑢q
tanpr 𝑢 Þ =𝑢′
1 + 𝑢q
cscpr 𝑢 Þ = −𝑢′
𝑢 𝑢q − 1 secpr 𝑢 Þ =
𝑢′𝑢 𝑢q − 1
cotpr 𝑢 Þ = −𝑢′
1 + 𝑢q
CommonDerivativesOperator𝑑𝑑𝑥 𝑦 =
𝑑𝑦𝑑𝑥
𝑑𝑑𝑥 𝑥
0 = 𝑛𝑥0pr𝑑𝑑𝑥 𝑦
0 = 𝑛𝑦0pr𝑑𝑦𝑑𝑥
𝑑𝑑𝑥 𝑒
� = 𝑒�𝑑𝑑𝑥 𝑒
² � = 𝑒² � 𝑓Þ 𝑥 𝑑𝑑𝑥 ln 𝑥 =
1𝑥
𝑑𝑑𝑥 ln 𝑓 𝑥 =
𝑓Þ 𝑥𝑓 𝑥
𝑑𝑑𝑥 𝑎
� = 𝑎� ln 𝑎𝑑𝑑𝑥 𝑎
² � = 𝑎² � 𝑓Þ 𝑥 ln 𝑎
𝑑𝑑𝑥 sin 𝑥 = cos 𝑥
𝑑𝑑𝑥 csc 𝑥 = −csc 𝑥 cot 𝑥
𝑑𝑑𝑥 cos 𝑥 = −sin 𝑥
𝑑𝑑𝑥 (sec 𝑥) = sec 𝑥 tan 𝑥
𝑑𝑑𝑥 tan 𝑥 = secq 𝑥
𝑑𝑑𝑥 cot 𝑥 = −cscq 𝑥
𝑑𝑑𝑥 sin
pr 𝑥 =1
1 − 𝑥q
𝑑𝑑𝑥 csc
pr 𝑥 =−1
𝑥 𝑥q − 1
𝑑𝑑𝑥 cos
pr 𝑥 =−11 − 𝑥q
𝑑𝑑𝑥 sec
pr 𝑥 =1
𝑥 𝑥q − 1
𝑑𝑑𝑥 tan
pr 𝑥 =1
1 + 𝑥q𝑑𝑑𝑥 cot
pr 𝑥 =−1
1 + 𝑥q
𝑑𝑑𝑥 sinh 𝑥 = cosh 𝑥
𝑑𝑑𝑥 csch 𝑥 = −csch 𝑥 coth 𝑥
𝑑𝑑𝑥 cosh 𝑥 = sinh 𝑥
𝑑𝑑𝑥 sech 𝑥 = −sech 𝑥 tanh 𝑥
𝑑𝑑𝑥 tanh 𝑥 = sechq 𝑥
𝑑𝑑𝑥 coth 𝑥 = −cschq 𝑥
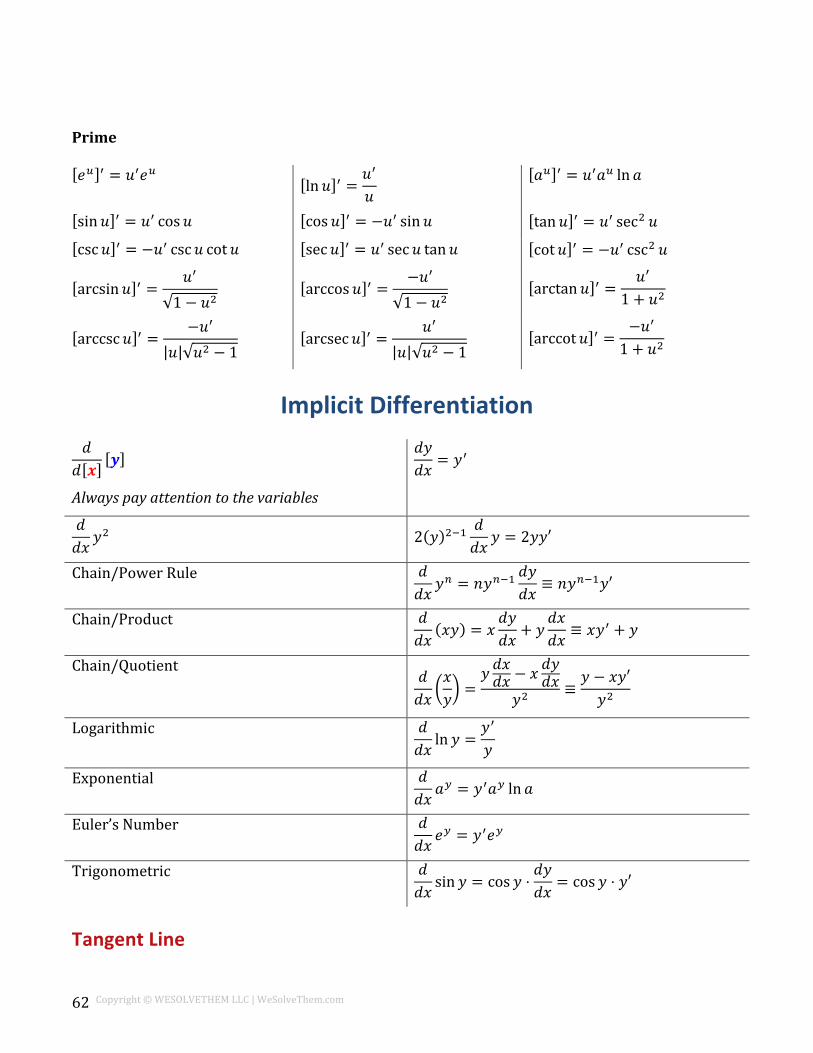
Copyright©WESOLVETHEMLLC|WeSolveThem.com62
Prime𝑒3 Þ = 𝑢Þ𝑒3
ln 𝑢 Þ =𝑢Þ
𝑢 𝑎3 Þ = 𝑢Þ𝑎3 ln 𝑎
sin 𝑢 Þ = 𝑢Þ cos 𝑢 cos 𝑢 Þ = −𝑢Þ sin 𝑢 tan 𝑢 Þ = 𝑢Þ secq 𝑢
csc 𝑢 Þ = −𝑢Þ csc 𝑢 cot 𝑢 sec 𝑢 Þ = 𝑢Þ sec 𝑢 tan 𝑢 cot 𝑢 Þ = −𝑢Þ cscq 𝑢
arcsin 𝑢 Þ =𝑢Þ
1 − 𝑢q arccos 𝑢 Þ =
−𝑢Þ
1 − 𝑢q arctan 𝑢 Þ =
𝑢Þ
1 + 𝑢q
arccsc 𝑢 Þ =−𝑢Þ
𝑢 𝑢q − 1 arcsec 𝑢 Þ =
𝑢Þ
𝑢 𝑢q − 1 arccot 𝑢 Þ =
−𝑢Þ
1 + 𝑢q
ImplicitDifferentiation𝑑𝑑 𝒙 𝒚
Alwayspayattentiontothevariables
𝑑𝑦𝑑𝑥 = 𝑦Þ
𝑑𝑑𝑥 𝑦
q 2 𝑦 qpr 𝑑𝑑𝑥 𝑦 = 2𝑦𝑦′
Chain/PowerRule 𝑑𝑑𝑥 𝑦
0 = 𝑛𝑦0pr𝑑𝑦𝑑𝑥 ≡ 𝑛𝑦0pr𝑦′
Chain/Product 𝑑𝑑𝑥 𝑥𝑦 = 𝑥
𝑑𝑦𝑑𝑥 + 𝑦
𝑑𝑥𝑑𝑥 ≡ 𝑥𝑦Þ + 𝑦
Chain/Quotient𝑑𝑑𝑥
𝑥𝑦 =
𝑦 𝑑𝑥𝑑𝑥 − 𝑥𝑑𝑦𝑑𝑥
𝑦q ≡𝑦 − 𝑥𝑦′𝑦q
Logarithmic 𝑑𝑑𝑥 ln 𝑦 =
𝑦Þ
𝑦
Exponential 𝑑𝑑𝑥 𝑎
¦ = 𝑦Þ𝑎¦ ln 𝑎
Euler’sNumber 𝑑𝑑𝑥 𝑒
¦ = 𝑦Þ𝑒¦
Trigonometric 𝑑𝑑𝑥 sin 𝑦 = cos 𝑦 ⋅
𝑑𝑦𝑑𝑥 = cos 𝑦 ⋅ 𝑦′
TangentLine

Copyright©WESOLVETHEMLLC|WeSolveThem.com 63
𝑓 𝑥, 𝑦 = 0, 𝑃 𝑎, 𝑏 ⇒ 𝑦0 = 𝑓Þ 𝑎, 𝑏 𝑥 − 𝑎 + 𝑏RelatedRatesTheideaforrelatedrates,ingeneral,istofindtheequationthatrelatesgeometricallytothequestion,implicitlydifferentiateit,andthenpluginthegivenvariablesandsolvefortheunknown.Hereareafewexamplesi.e.justusetheequation/formulathatmimicstheobjectinquestion.Righttriangle 𝑎q + 𝑏q = 𝑐q ⇒ 𝑎𝑎Þ 𝑡 + 𝑏𝑏Þ 𝑡 = 𝑐𝑐Þ 𝑡
Circle 𝐴 = 𝜋𝑟q ⇒ 𝑑𝐴𝑑𝑡 = 2𝜋𝑟𝑟Þ𝑟 𝑡
Sphere 𝑉 =43𝜋𝑟
o ⇒ 𝑉Þ 𝑡 = 4𝜋𝑟q𝑑𝑟𝑑𝑡
HyperbolicFunctions
Notation
sinh 𝑥 =𝑒� − 𝑒p�
2 csch 𝑥 =2
𝑒� + 𝑒p� tanh 𝑥 =𝑒� − 𝑒p�
𝑒� + 𝑒p�
sech 𝑥 =2
𝑒� + 𝑒p� cosh 𝑥 =𝑒� + 𝑒p�
2 coth 𝑥 =𝑒� + 𝑒p�
𝑒� − 𝑒p�

Copyright©WESOLVETHEMLLC|WeSolveThem.com64
Graphs
sinh 𝑥 =𝑒� − 𝑒p�
2 csch 𝑥 =2
𝑒� + 𝑒p�
cosh 𝑥 =
𝑒� + 𝑒p�
2 sech 𝑥 =2
𝑒� + 𝑒p�
tanh 𝑥 =
𝑒� − 𝑒p�
𝑒� + 𝑒p� coth 𝑥 =𝑒� + 𝑒p�
𝑒� − 𝑒p�

Copyright©WESOLVETHEMLLC|WeSolveThem.com 65
Identities
sinh −𝑥 = −sinh 𝑥 cosh −𝑥 = cosh 𝑥
coshq 𝑥 − sinhq 𝑥 = 11 − tanhq 𝑥 = sechq 𝑥
sinh 𝑥 + 𝑦 = sinh 𝑥 cosh 𝑦 + cosh 𝑥 sinh 𝑦
cosh 𝑥 + 𝑦 = cosh 𝑥 cosh 𝑦 + sinh 𝑥 sinh 𝑦
sinhpr 𝑥 = ln 𝑥 + 𝑥q + 1 , −∞ ≤ 𝑥 ≤∞
coshpr 𝑥 = ln 𝑥 + 𝑥q − 1 , 𝑥 ≥ 1
tanhpr 𝑥 =12 ln
1 + 𝑥1 − 𝑥 , −1 < 𝑥 < 1
DerivativesStandardsinh 𝑢 Þ = 𝑢′ cosh 𝑢 cosh 𝑢 Þ = 𝑢Þ sinh 𝑢 tanh 𝑢 Þ = 𝑢Þ sechq 𝑢
csch 𝑢 Þ = −𝑢Þ csch 𝑢 coth 𝑢 sech 𝑢 Þ = −𝑢Þ sech 𝑢 tanh 𝑢 coth 𝑢 Þ = −𝑢Þ cschq 𝑢
Inverse
sinhpr 𝑢 Þ =𝑢Þ
1 + 𝑢q coshpr 𝑢 Þ =
𝑢Þ
𝑢q − 1 tanhpr 𝑢 Þ =
𝑢Þ
1 − 𝑢q
cschpr 𝑢 Þ = −𝑢Þ
𝑢 1 + 𝑢q sechpr 𝑢 Þ = −
𝑢Þ
𝑢 1 − 𝑢q cothpr 𝑢 Þ =
𝑢Þ
1 − 𝑢q

Copyright©WESOLVETHEMLLC|WeSolveThem.com66
ExtremaGraphingProcess
i) Identifythedomainofthefunction,asymptotes,andintercepts.
ii) Computethefirstderivative,setitequaltozeroandsolvefor𝑦Þ = 0, 𝑦Þ = undefined(criticalnumbers).
iii) Identifywhetherthefirstderivativeispositiveornegativetotheleftandrightofeachcriticalnumber.Ifitispositive,itisincreasing.Ifitisnegative,itisdecreasing.
iv) Computethesecondderivative,setitequaltozeroandsolve𝑦ÞÞ = 0, 𝑦Þ′ = undefined(criticalnumbers).
v) Identifywhetherthesecondderivativeispositiveornegativetotheleftandrightofeachcriticalnumber.Ifitispositive,itisconcaveup.Ifitisnegative,itisconcavedown.
vi) Verifythattheintervalsofincreasing,decreasingandconcavitylineupwiththedomainandthenidentifywhetherthecriticalnumbersaremaximums,minimumsorpointsofinflection.
vii) Usethisinformationtographthefunction.
CriticalNumbersCriticalnumbersoccurwherethederivative(s)isequaltozeroandorundefined.Max/MinAbsoluteMaximum
AbsoluteMinimum
LocalMax
LocalMin
𝑓 𝑐 ≥ 𝑓 𝑥 ∀�∈ 𝐷 𝑓 𝑐 ≤ 𝑓 𝑥 ∀�∈ 𝐷 𝑓 𝑐 ≥ 𝑓 𝑥 ∀�𝑥 → 𝑐 𝑓 𝑐 ≥ 𝑓 𝑥 ∀�𝑥 → 𝑐

Copyright©WESOLVETHEMLLC|WeSolveThem.com 67
Note:Absolutemax/mincanoccuratlocalsi.e.ifthelocalisthehighest/lowestpointonthegraph,itisalsoabsolute.Themax/minoccuronlyif𝑓 𝑐 isdefinedi.e.thefunctionmustbecontinuousatthecriticalnumberorendofintervals.IncreasinganddecreasingWhereverthefirstderivativeispositive,thefunctionisincreasing.Whereverthefirstderivativeisnegative,thefunctionisdecreasing.ConcavityWhereverthesecondderivativeispositive,thefunctionisconcaveup.Whereverthesecondderivativeisnegative,thefunctionisconcavedown.PointsofinflectionApointofinflectionoccurswhentotheleft/rightofthecriticalnumberhaveoppositeconcavity,and𝑓 𝑐 isdefined.TheoremsRolle’sTheoremIfthefollowingthreeconditionshold,thereisavalueintheinterval 𝑎, 𝑏 suchthat𝑓′ 𝑣𝑎𝑙𝑢𝑒 = 0
1) 𝑓iscontinuouson 𝑎, 𝑏 2) 𝑓isdifferentiableon 𝑎, 𝑏 3) 𝑓 𝑎 = 𝑓 𝑏
MeanValueTheoremIfthefollowingtwoconditionsholdtrue,thenthereisavaluein 𝑎, 𝑏 suchthat
𝑓Þ 𝑐 =𝑓 𝑏 − 𝑓 𝑎
𝑏 − 𝑎
1) 𝑓iscontinuouson 𝑎, 𝑏 2) 𝑓isdifferentiableon 𝑎, 𝑏 3) Simplyverifythefirsttwoconditions,andthesolvefor𝑐intheaboveequations,andthen
verify𝑐isin 𝑎, 𝑏
First&SecondDerivativeTest1st:Thefirsttestistoosimplytesttheleftandrightsideofthecriticalnumber(s)toseeifthefunctionisincreasing/decreasingandthenif𝑓isdefinedatthatcriticalnumberitisamax/min.

Copyright©WESOLVETHEMLLC|WeSolveThem.com68
2nd:Forthesecondderivativetest,thereisamaximumoraminimumifthefollowingaretrue.Minimum Maximum TestFails𝑓Þ 𝑐 = 0 ∧ 𝑓ÞÞ 𝑐 > 0 𝑓Þ 𝑐 = 0 ∧ 𝑓ÞÞ 𝑐 < 0 𝑓Þ 𝑐 = 0 ∧ 𝑓ÞÞ 𝑐 = 0
L’Hospital’sRuleIndeterminateForms
lim�→�
𝑓 𝑥 =00
lim�→�
𝑓 𝑥 =±∞±∞
lim�→�
𝑓 𝑥 = ±∞
∞ lim
�→�𝑓 𝑥 = 0 ⋅∞
lim�→�
𝑓 𝑥 =∞−∞ lim�→�
𝑓 𝑥 = 02 lim�→�
𝑓 𝑥 = 1∞ lim�→�
𝑓 𝑥 =∞2
RuleIfthelimitisoneofthefollowingforms:
lim�→�
𝑓 𝑥 = 0 ⋅∞,∞−∞, 02, 1∞,∞2
andcanthebemanipulatedintoonofthefollowingforms:
lim�→�
𝑓 𝑥 ~ lim�→�
𝑔 𝑥ℎ 𝑥 =
00 ,±∞±∞ , ±
∞
∞
Then
lim�→�
𝑔 𝑥ℎ 𝑥 = lim
�→�
𝑔′ 𝑥ℎ′ 𝑥 = lim
�→�
𝑔′′ 𝑥ℎ′′ 𝑥 = ⋯ lim
�→�
𝑔 0 𝑥ℎ 0 𝑥
ProcessYouwillneedtoperformmanipulationstothefunctionsinordertousethisrule(ingeneral).ThemostcommonscenarioisapplyingalogarithmicrulewhenyouhaveaexponentialfunctionLet𝑢 = 𝑓 𝑥 ,and𝑣 = 𝑔 𝑥
lim�→�
𝑔 𝑥 ² � = lim�→�
𝑣3 = lim�→�
𝑒®¯ 45 = lim�→�
𝑒3 ®¯ 4 = lim�→�
𝑒®¯ 4r3 = 𝑒
®óÿ!→"
®¯ 4r3

Copyright©WESOLVETHEMLLC|WeSolveThem.com 69
= 𝑒22 = 𝑒
∞∞ =ℋ 𝑒
®óÿ!→"
»»� ®¯ 4»»�r3
Nowyoumaygettheexponentintotheappropriateindeterminateform,andtaketheratioofderivatives.Note:Thepreviousproblems,isacommonprobleminschool.Therearemanydifferentmanipulationsfordifferentfunctions.Tolistthemallwouldbeimpossible,anditwouldtakeawayfromthepurposeoflearningproblemsolvingskills.Youwillneedtousetheentirealgebraic,limit,andderivativerulestogetherinordertosuccessfullysolvetheproblems.
Optimization(Ingeneral)Optimizationistosimplyfindtwofunctionsthatfitageometricshapei.e.onethatrepresentsthegeometry,andtheothertofitthenumbergivenintheprobleme.g.areaofrectanglewithperimeterP.Rearrangetoplugonefunctionintheotherandthenusederivativeteststofindthemax/min(s).GeneralIdea:Maxareofrectanglewithperimeter𝑃
𝐴 𝑥, 𝑦 = 𝑥𝑦, 2𝑥 + 2𝑦 = 𝑃
∴ 𝐴 𝑥 = 𝑥𝑃 − 2𝑥2
Onceyoufindthefunctionthatyouaretryingtooptimize,inthiscase“maxarea”usethederivativeteststofindthevaluesinquestion.
BusinessFormulasCostFunction 𝐶 𝑥
MarginalCostFunction 𝐶Þ 𝑥 =𝑑𝑑𝑥 𝐶 𝑥
Demand/Pricefunction(priceperunit) 𝑝 𝑥
Revenue 𝑅 𝑥 = 𝑝 𝑥 ⋅ 𝑥
MarginalRevenue 𝑅Þ 𝑥 =𝑑𝑑𝑥 𝑅 𝑥 = 𝑝 𝑥 + 𝑥𝑝Þ 𝑥
ProfitFunction 𝑃 𝑥 = 𝑅 𝑥 − 𝐶 𝑥
MarginalProfitFunction 𝑃Þ 𝑥 = 𝑅Þ 𝑥 − 𝐶Þ 𝑥
AverageProfitFunction𝑃 𝑥 =
𝑃 𝑥𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com70
Antiderivatives&IntegrationBasicRulesPowerRuleforantiderivatives 𝑦Þ = 𝑥0 ⇒ 𝑦 =
1𝑛 + 1𝑥
0 + 𝐶 ⇔ 𝑛 ≠ −1
Exponential𝑦Þ = 𝑎� ⇒ 𝑦 =
𝑎�
ln 𝑎 + 𝐶
NaturalLog(case1) 𝑦Þ =1𝑥 ⇒ 𝑦 = ln 𝑥 + 𝐶
NaturalLog(case2) 𝑦Þ =1
𝑎𝑥 + 𝑏 ⇒ 𝑦 =1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶
NaturalLog(case3)𝑦Þ =
𝑢Þ 𝑥𝑢 𝑥 ⇒ 𝑦 = ln 𝑢 𝑥 + 𝐶
Euler’sNumber(case1) 𝑦Þ = 𝑒�� ⇒ 𝑦 =1𝑎 𝑒
�� + 𝐶
Euler’sNumber(case2) 𝑦Þ = 𝑒���� ⇒ 𝑦 =1𝑎 𝑒
���� + 𝐶
Euler’sNumber(case3) 𝑦Þ = 𝑢Þ 𝑥 𝑒3 � ⇒ 𝑦 = 𝑒3 � + 𝐶
Anti-Chain-RuleSubstitutionMethod 𝑦Þ = 𝑓Þ 𝑔 𝑥 𝑔Þ 𝑥 ⇒ 𝑦 = 𝑓 𝑔 𝑥 + 𝐶
RiemannSumforAreaApproximation
𝐴 ≈ lim0→∞
𝑓 𝑥8∗0
81r
𝛥𝑥 , 𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥
𝑐0
81r
= 𝑐𝑛 𝑖0
81r
=𝑛 𝑛 + 1
2
𝑐𝑓 𝑥8
0
81r
= 𝑐 𝑓 𝑥8
0
81r
𝑖q0
81r
=𝑛 𝑛 + 1 2𝑛 + 1
6
𝑓 𝑥8 ± 𝑔 𝑥8
0
81r
= 𝑓 𝑥8
0
81r
± 𝑔 𝑥8
0
81r
𝑖o0
81r
=𝑛 𝑛 + 1
2
q

Copyright©WESOLVETHEMLLC|WeSolveThem.com 71
AreaApproximationRulesMidpointRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎𝑛 𝑓
𝑥r + 𝑥q2 + 𝑓
𝑥q + 𝑥o2 +⋯
TrapezoidRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎2𝑛 𝑓 𝑥r + 2𝑓 𝑥q + 2𝑓 𝑥o + ⋯+ 2𝑓 𝑥0pr + 𝑓 𝑥0
SimpsonRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎3𝑛 𝑓 𝑥r + 4𝑓 𝑥q + 2𝑓 𝑥o + 4𝑓 𝑥Ü + ⋯+ 2𝑓 𝑥0pq + 4𝑓 𝑥0pr + 𝑓 𝑥0
TheIntegralNotation∫
lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 ≡ 𝑓(𝑥)�
�𝑑𝑥
DefiniteIntegralProperties
𝑓 𝑥�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎 𝑐
�
�𝑑𝑥 = 𝑐 𝑏 − 𝑎
𝑓 𝑥�
�𝑑𝑥 = 0 𝑐𝑓 𝑥
�
�𝑑𝑥 = 𝑐 𝑓 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 0
⇔ 𝑓 −𝑥 = −𝑓 𝑥 odd
𝑓 𝑥 ± 𝑔 𝑥�
�𝑑𝑥 = 𝑓 𝑥
�
�𝑑𝑥 ± 𝑔 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 2 𝑓 𝑥
�
2
⇔ 𝑓 −𝑥 = 𝑓 𝑥 even
𝑓 𝑥�
�𝑑𝑥 = 𝑓 𝑥
𝒌
�𝑑𝑥 + 𝑓 𝑥
�
𝒌𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com72
NOTE:
𝑓 𝑥 ⋅ 𝑔 𝑥 𝑑𝑥 ≠ 𝑔 𝑥 𝑑𝑥 ⋅ 𝑓 𝑥 𝑑𝑥
𝑓 𝑥�
�𝑑𝑥 = − 𝑓 𝑥
�
�𝑑𝑥
FundamentalTheorems
Let𝑓 𝑥 = 𝑢and𝑔 𝑥 = 𝑣forthefollowing:
𝑖)𝑦 = 𝑓 𝑡 𝑑𝑡4
3⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑢 ∙ 𝑢′
𝑦 = 𝑓 𝑡 𝑑𝑡4
�⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑎 ∙ 𝑎Þ = 𝑓 𝑣 ∙ 𝑣Þ − 0 = 𝑓 𝑣 ∙ 𝑣Þ
𝑦 = 𝑓 𝑡 𝑑𝑡�
3⇒ 𝑦Þ = 𝑓 𝑏 ∙ 𝑏Þ − 𝑓 𝑢 ∙ 𝑢Þ = 0 − 𝑓 𝑢 ∙ 𝑢Þ = −𝑓 𝑢 ∙ 𝑢′
LimitDefinitionofaDefiniteIntegral
𝑖𝑖) lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 = 𝑓(𝑥)�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎
𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥
DifferentialEquation(1storder)
𝑦Þ = 𝑓Þ 𝑥 ⇒ 𝑑𝑦𝑑𝑥 = 𝑓Þ 𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥
⇒ 𝑦 + 𝑐r = 𝑓 𝑥 + 𝑐q ⇒ 𝑦 = 𝑓 𝑥 + 𝑐q − 𝑐r = 𝑓 𝑥 + 𝑐o ≡ 𝑓 𝑥 + 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com 73
CommonIntegrals
𝑑𝑥 = 𝑥 + 𝐶 𝑘 𝑑𝑥 = 𝑘𝑥 + 𝐶 𝑥 𝑑𝑥 =12 𝑥
q + 𝐶
𝑥q 𝑑𝑥 =13 𝑥
o + 𝐶 𝑥0 𝑑𝑥 =1
𝑛 + 1𝑥0�r + 𝐶
⇔ 𝑛 ≠ −1
1𝑥 𝑑𝑥 = ln |𝑥| + 𝐶
𝑒� 𝑑𝑥 = 𝑒� + 𝐶 𝑒�� 𝑑𝑥 =1𝑎 𝑒
�� + 𝐶 𝑒���� 𝑑𝑥 =1𝑎 𝑒
���� + 𝐶
1𝑥 + 1𝑑𝑥 = ln 𝑥 + 1 + 𝐶
1𝑎𝑥 + 𝑏 𝑑𝑥 =
1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶 𝑓 𝑢 𝑢′𝑑𝑢 = 𝐹 𝑢 + 𝐶
𝑒3𝑢′𝑑𝑢 = 𝑒3 + 𝐶 𝑢Þ
𝑢 𝑑𝑢 = ln 𝑢 + 𝐶 𝑓 𝑥�
�= 𝐹 𝑏 − 𝐹 𝑎
𝑢Þ cos 𝑢 𝑑𝑢 = sin 𝑢 + 𝐶 𝑢Þ sin 𝑢 𝑑𝑢 = −cos 𝑢 + 𝐶 𝑢Þ secq 𝑢 𝑑𝑢 = tan 𝑢 + 𝐶
𝑢Þ csc 𝑢 sec 𝑢 𝑑𝑢 = −csc 𝑢 + 𝐶 𝑢Þ sec 𝑢 tan 𝑢 𝑑𝑢 = sec 𝑢 + 𝐶 𝑢Þ cscq 𝑢 𝑑𝑢 = −cot 𝑢 + 𝐶
𝑢Þ
1 − 𝑢q𝑑𝑢 = arcsin 𝑢 + 𝐶
−𝑢Þ
1 − 𝑢q𝑑𝑢 = arccos 𝑢 + 𝐶
𝑢Þ
1 + 𝑢q 𝑑𝑢 = arctan 𝑢 + 𝐶
DefiniteIntegralRules

Copyright©WESOLVETHEMLLC|WeSolveThem.com74
Substitution𝑓 𝑔 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑢
È �
È �𝑑𝑢
IntegrationbyParts
𝑓 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑥 𝑔 𝑥 �
� − 𝑔 𝑥 𝑓Þ 𝑥�
�𝑑𝑥
Let𝑢 = 𝑓 𝑥 𝑑𝑣 = 𝑔Þ 𝑥 𝑑𝑥𝑑𝑢 = 𝑓Þ 𝑥 𝑑𝑥 𝑣 = 𝑔 𝑥 Then
𝑢�
�𝑑𝑣 = 𝑢𝑣 �
� − 𝑣�
�𝑑𝑢
INTEGRALCALCULUS(CALCLII)
ParametricandPolarOperationsNotations
𝑥 = 𝑥 𝑡 , 𝑡 ∈ 𝑎, 𝑏 𝑦 = 𝑦 𝑡 , 𝑡 ∈ 𝑎, 𝑏
𝑥Þ 𝑡 =𝑑𝑥𝑑𝑡 ≡ 𝑥 𝑦Þ 𝑡 =
𝑑𝑦𝑑𝑡 ≡ 𝑦
FirstDerivative
𝑦Þ 𝑡𝑥Þ 𝑡 =
𝑑𝑦𝑑𝑡𝑑𝑥𝑑𝑡
=𝑑𝑦𝑑𝑡 ⋅
𝑑𝑡𝑑𝑥 =
𝑑𝑦𝑑𝑥
SecondDerivative
𝑑q𝑦𝑑𝑥q =
𝑑𝑑𝑥𝑑𝑦𝑑𝑥 =
𝑑𝑑𝑥𝑦Þ 𝑡𝑥Þ 𝑡 =
𝑥Þ 𝑡 𝑑𝑑𝑥 𝑦
Þ 𝑡 − 𝑦Þ 𝑡 𝑑𝑑𝑥 𝑥
Þ 𝑡𝑥Þ 𝑡 q =
𝑥Þ 𝑡 𝑑𝑑𝑥𝑑𝑦𝑑𝑡 – 𝑦
Þ 𝑡 𝑑𝑑𝑥𝑑𝑥𝑑𝑡
𝑥Þ 𝑡 q
=𝑥Þ 𝑡 𝑑
𝑑𝑡𝑑𝑦𝑑𝑥 − 𝑦
Þ 𝑡 𝑑𝑑𝑡𝑑𝑥𝑑𝑥
𝑥Þ 𝑡 q =𝑥Þ 𝑡 𝑑
𝑑𝑡𝑑𝑦𝑑𝑥 − 𝑦
Þ 𝑡 𝑑𝑑𝑡 1
𝑥Þ 𝑡 q =𝑥Þ 𝑡 𝑑
𝑑𝑡𝑑𝑦𝑑𝑥
𝑥Þ 𝑡 q =𝑑𝑑𝑡𝑑𝑦𝑑𝑥
𝑥Þ 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com 75
∴𝑑q𝑦𝑑𝑥q =
𝑑𝑑𝑡𝑑𝑦𝑑𝑥𝑑𝑥𝑑𝑡
Trigonometric𝑥q + 𝑦q = 𝑟q 𝑥 = 𝑟 cos 𝜃 𝑦 = 𝑟 sin 𝜃 𝜃 = arctan
𝑦𝑥
Circle𝑥 − ℎ𝑟
q
+𝑦 − 𝑘𝑟
q
= 1 = cos 𝜃 q + sin 𝜃 q ⇒ 𝑥 − ℎ𝑟 = cos 𝜃 ∧
𝑦 − 𝑘𝑟 = sin 𝜃 , 𝜃 ∈ 0, 2𝜋
Ellipse𝑥 − ℎ𝑎
q
+𝑦 − 𝑘𝑏
q
= 1 = cos 𝜃 q + sin 𝜃 q ⇒ 𝑥 − ℎ𝑎 = cos 𝜃 ∧
𝑦 − 𝑘𝑏 = sin 𝜃 , 𝜃 ∈ 0, 2𝜋
PolarDerivative
𝑑𝑦𝑑𝑥 =
𝑑𝑦𝑑𝜃𝑑𝑟𝑑𝜃
=𝑑𝑑𝜃 𝑟 sin 𝜃𝑑𝑑𝜃 𝑟 cos 𝜃
=𝑟 𝜃 cos 𝜃 + 𝑟Þ 𝜃 sin 𝜃𝑟Þ 𝜃 cos 𝜃 − 𝑟 𝜃 sin 𝜃
PolarEquationsforEllipse𝑥q
𝑎q +𝑦q
𝑏q = 10 ≤ 𝑎 < 𝑏 𝑐q = 𝑎q − 𝑏q
Foci ±𝑐, 0 Vertices ±𝑎, 0
𝑥q
𝑏q +𝑦q
𝑎q = 10 ≤ 𝑎 < 𝑏 𝑐q = 𝑎q − 𝑏q
Foci 0,±𝑐, Vertices 0,±𝑎,
𝑒 < 1 𝑒 =eccentricity,𝑑 =diretrix
𝑟 𝜃 =𝑒𝑑
𝑎 ± 𝑒 cos 𝜃 𝑟 𝜃 =𝑒𝑑
𝑎 ± 𝑒 sin 𝜃𝑐q = 𝑎q − 𝑏q𝑒 =
𝑐𝑎
PolarEquationsforHyperbola
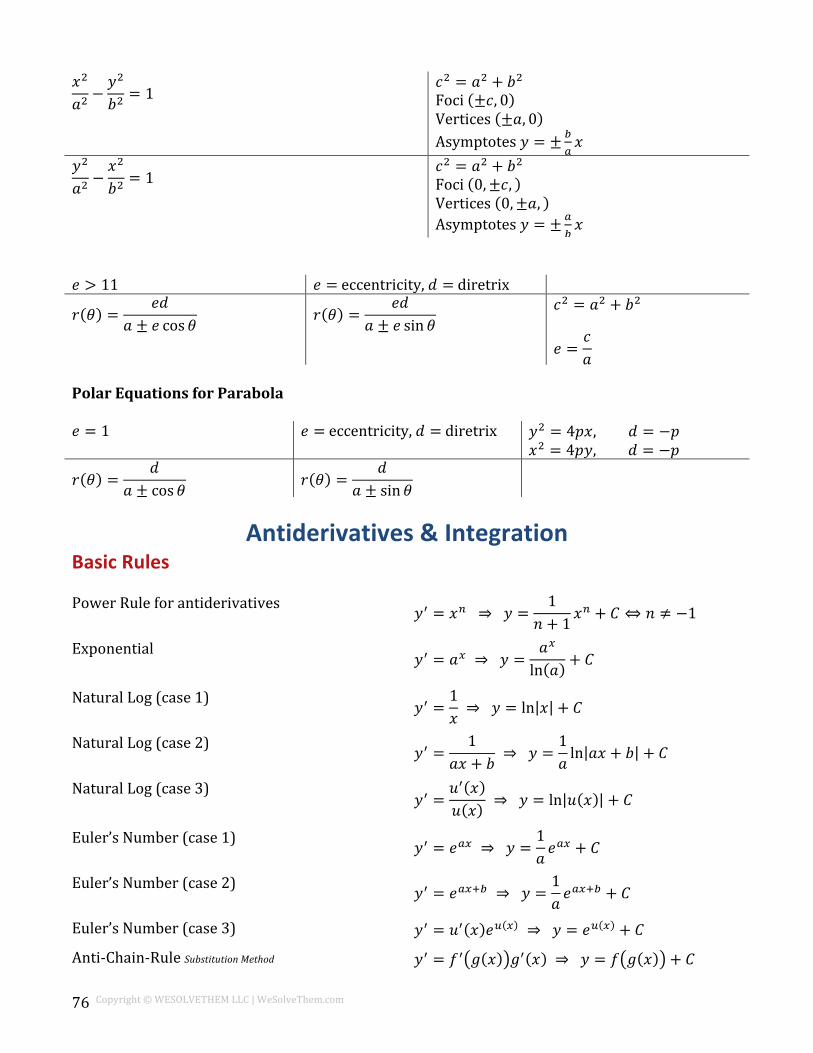
Copyright©WESOLVETHEMLLC|WeSolveThem.com76
𝑥q
𝑎q −𝑦q
𝑏q = 1𝑐q = 𝑎q + 𝑏qFoci ±𝑐, 0 Vertices ±𝑎, 0 Asymptotes𝑦 = ± �
�𝑥
𝑦q
𝑎q −𝑥q
𝑏q = 1𝑐q = 𝑎q + 𝑏qFoci 0,±𝑐, Vertices 0,±𝑎, Asymptotes𝑦 = ±�
�𝑥
𝑒 > 11 𝑒 =eccentricity,𝑑 =diretrix
𝑟 𝜃 =𝑒𝑑
𝑎 ± 𝑒 cos 𝜃 𝑟 𝜃 =𝑒𝑑
𝑎 ± 𝑒 sin 𝜃𝑐q = 𝑎q + 𝑏q𝑒 =
𝑐𝑎
PolarEquationsforParabola𝑒 = 1 𝑒 =eccentricity,𝑑 =diretrix 𝑦q = 4𝑝𝑥, 𝑑 = −𝑝
𝑥q = 4𝑝𝑦, 𝑑 = −𝑝
𝑟 𝜃 =𝑑
𝑎 ± cos 𝜃 𝑟 𝜃 =𝑑
𝑎 ± sin 𝜃
Antiderivatives&IntegrationBasicRulesPowerRuleforantiderivatives 𝑦Þ = 𝑥0 ⇒ 𝑦 =
1𝑛 + 1𝑥
0 + 𝐶 ⇔ 𝑛 ≠ −1
Exponential𝑦Þ = 𝑎� ⇒ 𝑦 =
𝑎�
ln 𝑎 + 𝐶
NaturalLog(case1) 𝑦Þ =1𝑥 ⇒ 𝑦 = ln 𝑥 + 𝐶
NaturalLog(case2) 𝑦Þ =1
𝑎𝑥 + 𝑏 ⇒ 𝑦 =1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶
NaturalLog(case3)𝑦Þ =
𝑢Þ 𝑥𝑢 𝑥 ⇒ 𝑦 = ln 𝑢 𝑥 + 𝐶
Euler’sNumber(case1) 𝑦Þ = 𝑒�� ⇒ 𝑦 =1𝑎 𝑒
�� + 𝐶
Euler’sNumber(case2) 𝑦Þ = 𝑒���� ⇒ 𝑦 =1𝑎 𝑒
���� + 𝐶
Euler’sNumber(case3) 𝑦Þ = 𝑢Þ 𝑥 𝑒3 � ⇒ 𝑦 = 𝑒3 � + 𝐶
Anti-Chain-RuleSubstitutionMethod 𝑦Þ = 𝑓Þ 𝑔 𝑥 𝑔Þ 𝑥 ⇒ 𝑦 = 𝑓 𝑔 𝑥 + 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com 77
RiemannSumforAreaApproximation
𝐴 ≈ lim0→∞
𝑓 𝑥8∗0
81r
𝛥𝑥 , 𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥
𝑐0
81r
= 𝑐𝑛 𝑖0
81r
=𝑛 𝑛 + 1
2
𝑐𝑓 𝑥8
0
81r
= 𝑐 𝑓 𝑥8
0
81r
𝑖q0
81r
=𝑛 𝑛 + 1 2𝑛 + 1
6
𝑓 𝑥8 ± 𝑔 𝑥8
0
81r
= 𝑓 𝑥8
0
81r
± 𝑔 𝑥8
0
81r
𝑖o0
81r
=𝑛 𝑛 + 1
2
q
AreaApproximationRulesMidpointRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎𝑛 𝑓
𝑥r + 𝑥q2 + 𝑓
𝑥q + 𝑥o2 +⋯
TrapezoidRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎2𝑛 𝑓 𝑥r + 2𝑓 𝑥q + 2𝑓 𝑥o + ⋯+ 2𝑓 𝑥0pr + 𝑓 𝑥0
TheIntegralNotation∫
lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 ≡ 𝑓(𝑥)�
�𝑑𝑥
DefiniteIntegralProperties
𝑓 𝑥�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎 𝑐
�
�𝑑𝑥 = 𝑐 𝑏 − 𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com78
𝑓 𝑥�
�𝑑𝑥 = 0 𝑐𝑓 𝑥
�
�𝑑𝑥 = 𝑐 𝑓 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 0
⇔ 𝑓 −𝑥 = −𝑓 𝑥 odd
𝑓 𝑥 ± 𝑔 𝑥�
�𝑑𝑥 = 𝑓 𝑥
�
�𝑑𝑥 ± 𝑔 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 2 𝑓 𝑥
�
2
⇔ 𝑓 −𝑥 = 𝑓 𝑥 even
𝑓 𝑥�
�𝑑𝑥 = 𝑓 𝑥
𝒌
�𝑑𝑥 + 𝑓 𝑥
�
𝒌𝑑𝑥
NOTE:
𝑓 𝑥 ⋅ 𝑔 𝑥 𝑑𝑥 ≠ 𝑔 𝑥 𝑑𝑥 ⋅ 𝑓 𝑥 𝑑𝑥
𝑓 𝑥�
�𝑑𝑥 = − 𝑓 𝑥
�
�𝑑𝑥
FundamentalTheorems
Let𝑓 𝑥 = 𝑢and𝑔 𝑥 = 𝑣forthefollowing:
𝑖)𝑦 = 𝑓 𝑡 𝑑𝑡4
3⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑢 ∙ 𝑢′
𝑦 = 𝑓 𝑡 𝑑𝑡4
�⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑎 ∙ 𝑎Þ = 𝑓 𝑣 ∙ 𝑣Þ − 0 = 𝑓 𝑣 ∙ 𝑣Þ
𝑦 = 𝑓 𝑡 𝑑𝑡�
3⇒ 𝑦Þ = 𝑓 𝑏 ∙ 𝑏Þ − 𝑓 𝑢 ∙ 𝑢Þ = 0 − 𝑓 𝑢 ∙ 𝑢Þ = −𝑓 𝑢 ∙ 𝑢′
LimitDefinitionofaDefiniteIntegral
𝑖𝑖) lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 = 𝑓(𝑥)�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎
𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 79
DifferentialEquation(1storder)
𝑦Þ = 𝑓Þ 𝑥 ⇒ 𝑑𝑦𝑑𝑥 = 𝑓Þ 𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥
⇒ 𝑦 + 𝑐r = 𝑓 𝑥 + 𝑐q ⇒ 𝑦 = 𝑓 𝑥 + 𝑐q − 𝑐r = 𝑓 𝑥 + 𝑐o ≡ 𝑓 𝑥 + 𝐶
CommonIntegrals
𝑑𝑥 = 𝑥 + 𝐶 𝑘 𝑑𝑥 = 𝑘𝑥 + 𝐶 𝑥 𝑑𝑥 =12 𝑥
q + 𝐶
𝑥q 𝑑𝑥 =13 𝑥
o + 𝐶 𝑥0 𝑑𝑥 =1
𝑛 + 1𝑥0�r + 𝐶
⇔ 𝑛 ≠ −1
1𝑥 𝑑𝑥 = ln |𝑥| + 𝐶
𝑒� 𝑑𝑥 = 𝑒� + 𝐶 𝑒�� 𝑑𝑥 =1𝑎 𝑒
�� + 𝐶 𝑒���� 𝑑𝑥 =1𝑎 𝑒
���� + 𝐶
1𝑥 + 1𝑑𝑥 = ln 𝑥 + 1 + 𝐶
1𝑎𝑥 + 𝑏 𝑑𝑥 =
1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶 𝑓 𝑢 𝑢′𝑑𝑢 = 𝐹 𝑢 + 𝐶
𝑒3𝑢′𝑑𝑢 = 𝑒3 + 𝐶 𝑢Þ
𝑢 𝑑𝑢 = ln 𝑢 + 𝐶 𝑓 𝑥�
�= 𝐹 𝑏 − 𝐹 𝑎
𝑢Þ cos 𝑢 𝑑𝑢 = sin 𝑢 + 𝐶 𝑢Þ sin 𝑢 𝑑𝑢 = −cos 𝑢 + 𝐶 𝑢Þ secq 𝑢 𝑑𝑢 = tan 𝑢 + 𝐶
𝑢Þ csc 𝑢 sec 𝑢 𝑑𝑢 = −csc 𝑢 + 𝐶 𝑢Þ sec 𝑢 tan 𝑢 𝑑𝑢 = sec 𝑢 + 𝐶 𝑢Þ cscq 𝑢 𝑑𝑢 = −cot 𝑢 + 𝐶
𝑢Þ
1 − 𝑢q𝑑𝑢 = arcsin 𝑢 + 𝐶
−𝑢Þ
1 − 𝑢q𝑑𝑢 = arccos 𝑢 + 𝐶
𝑢Þ
1 + 𝑢q 𝑑𝑢 = arctan 𝑢 + 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com80
DefiniteIntegralRulesSubstitution
𝑓 𝑔 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑢
È �
È �𝑑𝑢
IntegrationbyParts
𝑓 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑥 𝑔 𝑥 �
� − 𝑔 𝑥 𝑓Þ 𝑥�
�𝑑𝑥
Let𝑢 = 𝑓 𝑥 𝑑𝑣 = 𝑔Þ 𝑥 𝑑𝑥𝑑𝑢 = 𝑓Þ 𝑥 𝑑𝑥 𝑣 = 𝑔 𝑥 Then
𝑢�
�𝑑𝑣 = 𝑢𝑣 �
� − 𝑣�
�𝑑𝑢
TrigSubstitution𝑎q − 𝑥q 𝑎q + 𝑥q 𝑥q − 𝑎q
1 − sinq 𝜃 = cosq 𝜃 1 + tanq 𝜃 = secq 𝜃 secq 𝜃 − 1 = tanq 𝜃
𝑥 = 𝑎 sin 𝜃 𝑥 = 𝑎 tan 𝜃 𝑥 = 𝑎 sec 𝜃
𝜃 ∈ −𝜋2 ,𝜋2 𝜃 ∈ −
𝜋2 ,𝜋2 𝜃 ∈ 0,
𝜋2 ∨ 𝜃 ∈ 𝜋,
3𝜋2
TrigIdentity
tan 𝑥 𝑑𝑥 =sin 𝑥cos 𝑥 𝑑𝑥 = −
1cos 𝑥 ⋅ − sin 𝑥 𝑑𝑥,
𝑑𝑑𝑥 ln 𝑢 𝑥 =
1𝑢𝑑𝑢𝑑𝑥
= − ln cos 𝑥 + 𝐶 = ln1
cos 𝑥 + 𝐶 = ln sec 𝑥 + 𝐶
PartialFractions𝑝 𝑥
𝑥 𝑥 + 1 =𝐴𝑥 +
𝐵𝑥 + 1
𝑝 𝑥𝑥q 𝑥 + 1 =
𝐴𝑥 +
𝐵𝑥q +
𝐶𝑥 + 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com 81
𝑝 𝑥𝑥 𝑥q + 1 =
𝐴𝑥 +
𝐵𝑥 + 𝐶𝑥q + 1
𝑝 𝑥𝑥 𝑥q + 1 q =
𝐴𝑥 +
𝐵𝑥 + 𝐶𝑥q + 1 +
𝐷𝑥 + 𝐸𝑥q + 1 q
IntegrationSteps
Askyourselfthefollowingquestions:
1. Istheintegrandinintegratableform?2. CanIperformafunctionortrig-identitymanipulation?3. ShouldIuseU-SubstitutionorTrig-Substitution?4. IntegrationbyParts?5. Partialfractiondecomposition?
Foradefiniteintegralalwayschecktoseeifthefunctionisdefinedonthebounds
ImproperIntegrationInfiniteBounds
𝑓 𝑥�∞
p∞𝑑𝑥 = 𝑓 𝑥
2
p∞𝑑𝑥 + 𝑓 𝑥
�∞
2𝑑𝑥 = lim
©:→p∞𝑓 𝑥2
©:𝑑𝑥 + lim
©�→∞𝑓 𝑥
©�
2𝑑𝑥
UndefinedBounds
𝑓 𝑥�
�𝑑𝑥, 𝑥 ∈ 𝑎, 𝑏 ⇒ lim
©:→ ! ü𝑓 𝑥2
©:𝑑𝑥 + lim
©�→�ý𝑓 𝑥
©�
2𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com82
Areas,Volumes,andCurveLengthAreawithrespecttoanaxisCartesian𝑥 − 𝑎𝑥𝑖𝑠 𝑦 − 𝑎𝑥𝑖𝑠
𝐴 = 𝑓 𝑥�
�𝑑𝑥 ⇔ 𝑓 𝑥 ≥ 0∀�∈ 𝑎, 𝑏 𝐴 = 𝑔 𝑦
»
�𝑑𝑦 ⇔ 𝑔 𝑦 ≥ 0∀¦∈ 𝑐, 𝑑
AreabetweencurvesGiventwocurves𝑓 ∧ 𝑔setthemequaltoeachothertofindallx-coordinatesofintersection.
𝐴 = 𝑓 𝑥 − 𝑔 𝑥�
�𝑑𝑥 ⇔ 𝑓 𝑥 ≥ 𝑔 𝑥 ∀�∈ 𝑎, 𝑏
or
𝐴 = 𝑓 𝑥 − 𝑔 𝑥�;ý:
�;𝑑𝑥 = 𝑓 𝑥 − 𝑔 𝑥
��
�:𝑑𝑥 + 𝑓 𝑥 − 𝑔 𝑥
�Ó
��𝑑𝑥 +⋯
PolarArea
𝐴 =12 𝑟 𝜃 q
<�
<:𝑑𝜃 ∧ 𝐴 =
12 𝑅 𝜃 q − 𝑟 𝜃 q
<�
<:𝑑𝜃
Volumeaboutanaxis(DiskMethod)𝑥 − 𝑎𝑥𝑖𝑠 𝑦 − 𝑎𝑥𝑖𝑠
𝑉 = 𝜋 𝑓 𝑥 q�
�𝑑𝑥 ⇔ 𝑓 𝑥 ≥ 0∀�∈ 𝑎, 𝑏 𝑉 = 𝜋 𝑔 𝑦 q
»
�𝑑𝑦 ⇔ 𝑔 𝑦 ≥ 0∀¦∈ 𝑐, 𝑑
Volumebetweencurves(WasherMethod)Giventwocurves𝑓 ∧ 𝑔setthemequaltoeachothertofindallx-coordinatesofintersection.
𝑉 = 𝜋 𝑓 𝑥 q − 𝑔 𝑥 q�
�𝑑𝑥 ⇔ 𝑓 𝑥 ≥ 𝑔 𝑥 ∀�∈ 𝑎, 𝑏
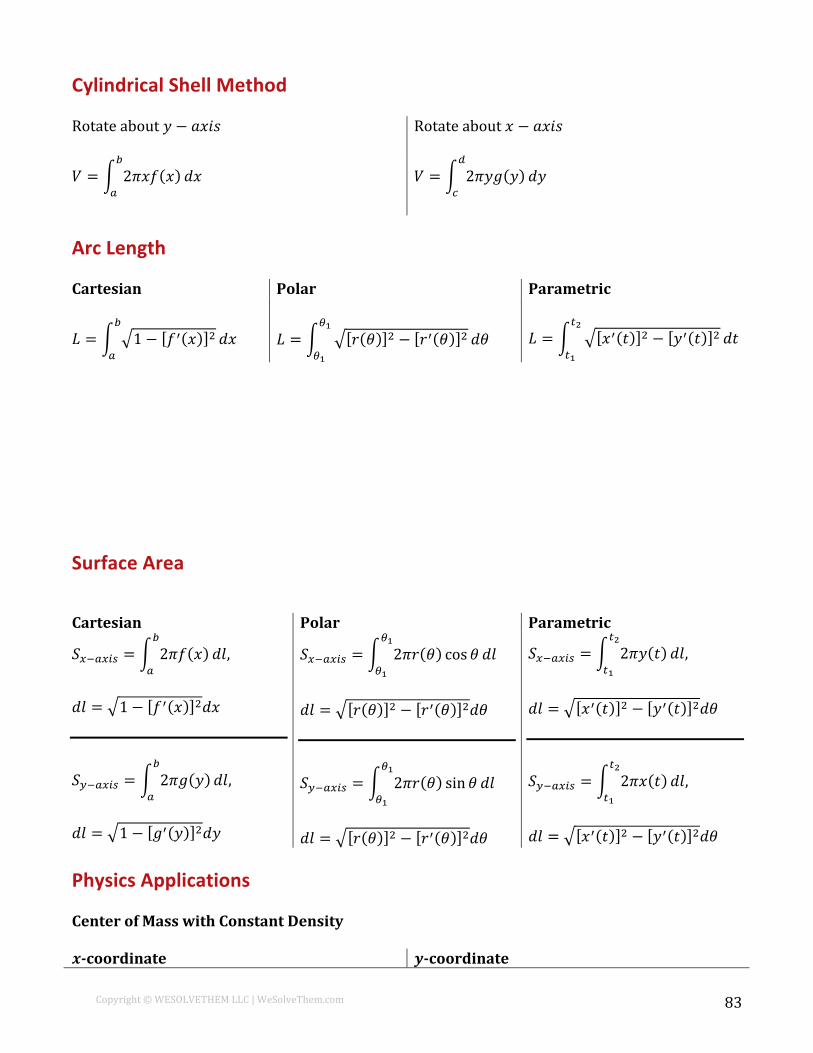
Copyright©WESOLVETHEMLLC|WeSolveThem.com 83
CylindricalShellMethodRotateabout𝑦 − 𝑎𝑥𝑖𝑠 Rotateabout𝑥 − 𝑎𝑥𝑖𝑠
𝑉 = 2𝜋𝑥𝑓 𝑥�
�𝑑𝑥 𝑉 = 2𝜋𝑦𝑔 𝑦
»
�𝑑𝑦
ArcLengthCartesian Polar Parametric
𝐿 = 1 − 𝑓Þ 𝑥 q�
�𝑑𝑥
𝐿 = 𝑟 𝜃 q − 𝑟Þ 𝜃 q<:
<:𝑑𝜃
𝐿 = 𝑥Þ 𝑡 q − 𝑦Þ 𝑡 q©�
©:𝑑𝑡
SurfaceAreaCartesian Polar Parametric
𝑆�p��8Û = 2𝜋𝑓 𝑥�
�𝑑𝑙,
𝑑𝑙 = 1 − 𝑓Þ 𝑥 q𝑑𝑥
𝑆¦p��8Û = 2𝜋𝑔 𝑦�
�𝑑𝑙,
𝑑𝑙 = 1 − 𝑔Þ 𝑦 q𝑑𝑦
𝑆�p��8Û = 2𝜋𝑟 𝜃 cos 𝜃<:
<:𝑑𝑙
𝑑𝑙 = 𝑟 𝜃 q − 𝑟Þ 𝜃 q𝑑𝜃
𝑆¦p��8Û = 2𝜋𝑟 𝜃 sin 𝜃<:
<:𝑑𝑙
𝑑𝑙 = 𝑟 𝜃 q − 𝑟Þ 𝜃 q𝑑𝜃
𝑆�p��8Û = 2𝜋𝑦 𝑡©�
©:𝑑𝑙,
𝑑𝑙 = 𝑥Þ 𝑡 q − 𝑦Þ 𝑡 q𝑑𝜃
𝑆¦p��8Û = 2𝜋𝑥 𝑡©�
©:𝑑𝑙,
𝑑𝑙 = 𝑥Þ 𝑡 q − 𝑦Þ 𝑡 q𝑑𝜃
PhysicsApplicationsCenterofMasswithConstantDensity𝒙-coordinate 𝒚-coordinate

Copyright©WESOLVETHEMLLC|WeSolveThem.com84
𝑥 =𝑀¦
𝑚 𝑦 =𝑀�
𝑚
𝑀¦ = 𝜌 𝑥𝑓 𝑥�
�𝑑𝑥 𝑀� =
𝜌2 𝑓 𝑥 q
�
�𝑑𝑥
𝑚 = 𝜌𝐴 = 𝜌 𝑓 𝑥�
�𝑑𝑥, 𝑓 𝑥 ≥ 0 ∈ 𝑎, 𝑏 𝑚 = 𝜌𝐴 = 𝜌 𝑓 𝑥
�
�𝑑𝑥, 𝑓 𝑥 ≥ 0 ∈ 𝑎, 𝑏
∴ 𝑥 =1𝐴 𝑥𝑓 𝑥
�
�𝑑𝑥 ∴ 𝑦 =
12𝐴 𝑓 𝑥 q
�
�𝑑𝑥
𝑥 =1𝐴 𝑥 𝑓 𝑥 − 𝑔 𝑥
�
�𝑑𝑥, 𝑓 ≥ 𝑔 ∈ 𝑎, 𝑏 𝑀� =
12𝐴 𝑓 𝑥 q − 𝑔 𝑥 q
�
�𝑑𝑥, 𝑓 ≥ 𝑔 ∈ 𝑎, 𝑏
SequencesvsSeriesSequence Series
𝑎0 = 𝑎2, 𝑎r, 𝑎q, …
𝑎0
∞
012
= 𝑎2 + 𝑎r + 𝑎q + ⋯
SequenceTests𝑎0Converges 𝑎0Diverges
lim0→∞
𝑎0 = 𝐿 lim0→∞
𝑎0 = ±∞ ∨ 𝐷𝑁𝐸
SeriesTestsTest Form Condition Diverges ConvergesGeometric
𝑎𝑟0pr∞
01r
𝒓 ≥ 𝟏 𝒓 < 𝟏𝑺 =
𝒂𝟏 − 𝒓
P-Series 1𝑛Ù
∞
01r
𝒑 ≤ 𝟏 𝒑 > 𝟏
IntegralTest𝑎0
∞
01r
𝒂𝒏ispositiveanddecreasingon[𝟏,∞) 𝒇 𝒙 𝒅𝒙 =∞
∞
𝟏
𝒆. 𝒈.𝒂𝒏 =𝟏𝒏𝟐
⇒ 𝒇 𝒙 =𝟏𝒙𝟐
𝒇 𝒙 𝒅𝒙 = 𝒌∞
𝟏
Comparison𝑎0
∞
01r
𝒂𝒏,𝒃𝒏𝐚𝐫𝐞𝐩𝐨𝐬𝐢𝐭𝐢𝐯𝐞 𝒂𝒏 ≥ 𝒃𝒏∀𝒏
⇔ 𝒃𝒏𝐝𝐢𝐯𝐞𝐫𝐠𝐞𝐬
𝒂𝒏 ≤ 𝒃𝒏∀𝒏⇔ 𝒃𝒏𝐜𝐨𝐧𝐯𝐞𝐫𝐠𝐞𝐬

Copyright©WESOLVETHEMLLC|WeSolveThem.com 85
LimitComparison 𝑎0
∞
01r
𝒂𝒏,𝒃𝒏𝐚𝐫𝐞𝐩𝐨𝐬𝐢𝐭𝐢𝐯𝐞𝐥𝐢𝐦𝒏→∞
𝒂𝒏𝒃𝒏
= 𝒌, 𝒌 > 𝟎
𝜮𝒃𝒏𝐃𝐢𝐯𝐞𝐫𝐠𝐞𝐬 𝜮𝒃𝒏𝐂𝐨𝐧𝐯𝐞𝐫𝐠𝐞𝐬
AlternatingSeries −1 0pr𝑐0
∞
01r
𝒄𝒏 > 𝟎
Doesnotshowdivergence
𝒄𝒏�𝟏 ≤ 𝒄𝒏∀𝒏&𝐥𝐢𝐦𝒏→∞
𝒄𝒏 = 𝟎Ratio
𝑎0
∞
01r
𝐥𝐢𝐦
𝒏→∞
𝒂𝒏�𝟏𝒂𝒏
> 𝟏
𝐨𝐫 =∞
𝐥𝐢𝐦𝒏→∞
𝒂𝒏�𝟏𝒂𝒏
< 𝟏
Root𝑎0
∞
01r
𝐥𝐢𝐦
𝒏→∞𝒂𝒏
𝒏 > 𝟏𝐨𝐫 =∞
𝐥𝐢𝐦𝒏→∞
|𝒂𝒏|𝒏 < 𝟏
TestforAbsolute/ConditionalConvergence
AbsolutelyConvergent
ConditionallyConvergent
If 𝑎0
∞
01r
𝐂𝐨𝐧𝐯𝐞𝐫𝐠𝐞𝐬𝐭𝐡𝐞𝐧 |𝑎0
∞
01r
|Converges |𝑎0
∞
01r
|Diverges
Ifallelsefails,perform“ThenthTermforDivergenceTest”i.e.if lim
0→∞𝑎0 ≠ 0or𝐷𝑁𝐸thenthesum
diverges—doesnotshowconvergence.Taylorseries
𝑓 𝑥 ≈𝑓 0 𝑎𝑛! 𝑥 − 𝑎 0 = 𝑓 𝑥 + 𝑓Þ 𝑥 𝑥 − 𝑎 +
𝑓ÞÞ 𝑥2! 𝑥 − 𝑎 q +
𝑓ÞÞÞ 𝑥3! 𝑥 − 1 o + ⋯
MaclaurinSeries
𝑓 𝑥 ≈𝑓 0 0𝑛! 𝑥 0 = 𝑓 0 + 𝑓Þ 0 𝑥 +
𝑓ÞÞ 02! 𝑥q +
𝑓ÞÞÞ 03! 𝑥o + ⋯
PowerSeries
11 − 𝑢 = 𝑢 0
∞
012
Radius/IntervalofConvergesTheROCandintervalofconvergenceforafunctionisfoundbyputting𝑓intoit’spowerseriesrepresentation,andthenapplying,ingeneral,either“geometricseriestest”,“ratiotest”,andor

Copyright©WESOLVETHEMLLC|WeSolveThem.com86
“roottest”.Note:Theratio/roottestrequireyoutoplugtheintervalendsbackintotheseries,andusewhatevertestisnecessarytofindiftheseriesisdivergent/convergentatthatend-point.From 𝑥 − 𝑎 < 𝑅𝐼 = 𝑎 − 𝑅, 𝑎 + 𝑅 𝐼 = 𝑎 − 𝑅, 𝑎 + 𝑅 𝐼 = 𝑎 − 𝑅, 𝑎 + 𝑅 𝐼 = (𝑎 − 𝑅, 𝑎 + 𝑅)
3DCalculusMagnitude
𝑣 = 𝐯 = 𝑣r, 𝑣q, 𝑣o ⇒ 𝑣 = 𝐯 = 𝑣rq + 𝑣qq + 𝑣oq
UnitVectors
𝑣 =𝑣𝑣 ≡ 𝐯 =
𝐯𝐯
𝚤 ≡ 𝐢 𝚥 ≡ 𝐣 𝑘 ≡ 𝐤𝚤 = 1, 0, 0 𝚥 = 0, 1, 0 𝑘 = 1, 0, 0 Note:𝑣 = 𝑣r, 𝑣q, 𝑣o = 𝑣r 1, 0, 0 + 𝑣q 0, 1, 0 + 𝑣o 0, 0, 1 = 𝑣r𝚤 + 𝑣q𝚥 + 𝑣o𝑘 = 𝑣r𝐢 + 𝑣q𝐣+ 𝑣o𝐤

Copyright©WESOLVETHEMLLC|WeSolveThem.com 87
Dot/CrossProductDot𝑎 ⋅ 𝑏 = 𝐚 ⋅ 𝐛
= 𝑎r, 𝑎q, 𝑎o ⋅ 𝑏r, 𝑏q, 𝑏o
= 𝑎r𝑏r + 𝑎q𝑏q + 𝑎o𝑏o
Properties𝐚 ⋅ 𝐚 = 𝐚 q 𝐚 ⋅ 𝐛 = 𝐛 ⋅ 𝐚
𝐚 ⋅ 𝐛+ 𝐜 = 𝐚 ⋅ 𝐛+ 𝐚 ⋅ 𝐜 k𝐚 ⋅ 𝐛 = k 𝐚 ⋅ 𝐛 = 𝐚 ⋅ k𝐛
Cross𝑎×𝑏 = 𝐚×𝐛 = 𝑎r, 𝑎q, 𝑎o × 𝑏r, 𝑏q, 𝑏o
=𝚤 𝚥 𝑘𝑎r 𝑎q 𝑎o𝑏r 𝑏q 𝑏o
=
𝑎q 𝑎o𝑏q 𝑏o 𝚤 −
𝑎r 𝑎o𝑏r 𝑏o 𝚥 +
𝑎r 𝑎q𝑏r 𝑏q 𝑘
= 𝑎q𝑏o − 𝑏q𝑎o 𝚤 − 𝑎r𝑏o − 𝑏r𝑎o 𝚥 + 𝑎r𝑏q − 𝑏r𝑎q 𝑘
Properties𝐚×𝐛 = −𝐛×𝐚
k𝐚 ×𝐛 = k 𝐚×𝐛 = 𝐚× k𝐛
𝐚 ⋅ 𝐛×𝐜 = 𝐚×𝐛 ⋅ 𝐜
𝐚+ 𝐛 ×𝐜 = 𝐚×𝐜 + 𝐛×𝐜
𝐚× 𝐛+ 𝐜 = 𝐚×𝐛+ 𝐚×𝐜 𝐚× 𝐛×𝐜 = 𝐚 ⋅ 𝐜 𝐛− 𝐚 ⋅ 𝐛 𝐜
AnglesBetweenVectors𝑎 ⋅ 𝑏 = 𝑎 𝑏 cos 𝜃 𝑎×𝑏 = 𝑎 𝑏 sin 𝜃
⇒ 𝜃 = arccos𝑎 ⋅ 𝑏𝑎 𝑏
⇒ 𝜃 = arcsin𝑎×𝑏𝑎 𝑏
ProjectionsScalar Vector
compò𝑏 =𝑎 ⋅ 𝑏𝑎 proj𝐚𝑏 =
𝑎 ⋅ 𝑏𝑎 q 𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com88
Areas/VolumeTriangle
Parallelogram
Parallelepiped
𝐴 =12 𝑎×𝑏 𝐴 = 𝑎×𝑏 𝑉 = 𝑎 ⋅ 𝑏×𝑐
Lineℒ 𝑡 = 𝑃2 + 𝑡𝑣
= 𝑥2, 𝑦2, 𝑧2 + 𝑡 𝑎, 𝑏, 𝑐
= 𝑥2 + 𝑎𝑡, 𝑦2 + 𝑏𝑡, 𝑧2 + 𝑐𝑡 = 𝑥2, 𝑦2, 𝑧2 + 𝑡 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2
𝑣 = 𝑃r𝑃q = 𝑃q − 𝑃r
= 𝑥, 𝑦, 𝑧 − 𝑥2, 𝑦2, 𝑧2 = 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2
= 𝑎, 𝑏, 𝑐
LinefromtiptotipAlinesegmentfromthetipstwovectorsbeginningfromtheoriginto𝑣r → 𝑣qis
ℒ 𝑡 = 1 − 𝑡 𝑣r + 𝑡𝑣q, 𝑡 ∈ 0, 1
EquationofaPlane𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑 ⇒ 𝑛 = 𝑎, 𝑏, 𝑐 ⊥ surface𝑛isperpendiculartothesurface 𝑣isintheplane,𝑃2 = 𝑥2, 𝑦2, 𝑧2 (pointinplane)𝑛 ⊥ 𝑣 ⇒ 𝑛 ⋅ 𝑣 = 𝑎, 𝑏, 𝑐 ⋅ 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2 = 𝑎 𝑥 − 𝑥2 + 𝑏 𝑦 − 𝑦2 + 𝑐 𝑧 − 𝑧2 = 0VectorFunctions𝑟 𝑡 = 𝑟r 𝑡 , 𝑟q 𝑡 , 𝑟o 𝑡 = 𝑓 𝑡 , 𝑔 𝑡 , ℎ 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com 89
Limit lim©→�
𝑟 𝑡 = lim©→�
𝑓 𝑡 , lim©→�
𝑔 𝑡 , lim©→�
ℎ 𝑡
Derivative 𝑑𝑟𝑑𝑡 = 𝑓Þ 𝑡 , 𝑔Þ 𝑡 , ℎÞ 𝑡
DefiniteIntegral𝑟 𝑡
©�
©:𝑑𝑡 = 𝑟r 𝑡
©�
©:𝑑𝑡 𝚤 + 𝑟q 𝑡
©�
©:𝑑𝑡 𝚥 + 𝑟o 𝑡
©�
©:𝑑𝑡 𝑘
IndefiniteIntegral 𝑟 𝑡 𝑑𝑡 = 𝑟r 𝑡 𝑑𝑡 𝚤 + 𝑟q 𝑡 𝑑𝑡 𝚥 + 𝑟o 𝑡 𝑑𝑡 𝑘 + 𝐶
DifferentiationRulesNote:𝑣 𝑡 , 𝑢 𝑡 , 𝑓 𝑡 FunctiondotVector VectorcrossVector
𝑑𝑑𝑡 𝑓 𝑡 ⋅ 𝑢 𝑡 = 𝑢 𝑡
𝑑𝑓𝑑𝑡 + 𝑓 𝑡
𝑑𝑢𝑑𝑡
𝑑𝑑𝑡 𝑢 𝑡 ×𝑣 𝑡 =
𝑑𝑢𝑑𝑡 ×𝑣 𝑡 + 𝑢 𝑡 ×
𝑑𝑣𝑑𝑡
VectordotVector ChainRule
𝑑𝑑𝑡 𝑢 𝑡 ⋅ 𝑣 𝑡 = 𝑣 𝑡 ⋅
𝑑𝑢𝑑𝑡 + 𝑢 𝑡 ⋅
𝑑𝑣𝑑𝑡
𝑑𝑑𝑡 𝑢 𝑓 𝑡 = 𝑢Þ 𝑓 𝑡 𝑓Þ 𝑡
Arclength
𝐿 =𝑑𝑟r𝑑𝑡
q
+𝑑𝑟q𝑑𝑡
q
+𝑑𝑟o𝑑𝑡
q©�
©:𝑑𝑡 = 𝑓Þ 𝑡 q + 𝑔Þ 𝑡 q + ℎÞ 𝑡 q
©�
©:𝑑𝑡 =
𝑑𝑟𝑑𝑡
©�
©:𝑑𝑡
Tangents

Copyright©WESOLVETHEMLLC|WeSolveThem.com90
UnitTangentVector𝐓 𝑡 =
𝐫Þ 𝑡𝐫Þ 𝑡 , 𝐫Þ 𝑡 =
𝑑𝑠𝑑𝑡
Curvature1𝜅(𝑡) =
𝑑𝐓𝑑𝑠 =
𝑑𝐓𝑑𝑡𝑑𝑡𝑑𝑠 =
𝑑𝐓𝑑𝑡𝑑𝑠𝑑𝑡
=𝐓Þ 𝑡𝐫Þ 𝑡
Curvature2(vectorfunction)𝜅(𝑡) =
𝐫Þ 𝑡 ×𝐫ÞÞ 𝑡𝐫Þ 𝑡 o
Curvature3(singlevariable)𝜅(𝑥) =
𝑓ÞÞ 𝑥
1 + 𝑓Þ 𝑥 qoq
Curvature4(parametric)𝜅 𝑡 =
𝑥Þ 𝑡 𝑦ÞÞ 𝑡 − 𝑦Þ 𝑡 𝑥ÞÞ 𝑡
𝑥Þ 𝑡 q + 𝑦Þ 𝑡 qoq
NormalVector𝐍 𝑡 =
𝐓Þ 𝑡𝐓Þ 𝑡
BinormalVector 𝐁 𝑡 = 𝐓 𝑡 ×𝐍 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com 91
TangentialandNormalComponents(acceleration)PhysicsNotationsPosition 𝑟 𝑡 ≡ 𝐫 𝑡
Velocity 𝑣 𝑡 = 𝑟Þ 𝑡 =
𝑑𝑟𝑑𝑡 =
𝑑𝐫𝑑𝑡 = 𝐫Þ 𝑡
Speed
𝑣 = 𝑣 𝑡 = 𝑟Þ 𝑡
Acceleration 𝑎 𝑡 = 𝑣Þ 𝑡 = 𝑟ÞÞ 𝑡
𝐓 𝑡 =𝐫Þ 𝑡𝐫Þ 𝑡 =
𝑣 𝑡𝑣 𝑡 =
𝑣𝑣
𝑣 = 𝑣𝐓 ⇒ 𝑑𝑣𝑑𝑡 = 𝑎 = 𝑣Þ𝐓+ 𝑣𝐓′
Curvature𝜅 =
𝐓Þ
𝐫Þ =𝐓Þ
𝑣 ⇒ 𝜅𝑣 = 𝐓′
TangentialComponent(acceleration) 𝑎^ =𝑑𝑑𝑡 𝑟
Þ =𝑑𝑣𝑑𝑡 = 𝑣Þ, 𝑣 = 𝑣 = 𝑟′ ≡ 𝐫′
NormalComponent(acceleration) 𝑎_ = 𝜅𝑣q
Acceleration
𝒂 = 𝑣Þ𝐓+ 𝜅𝑣q𝐍 = 𝑎^𝐓+ 𝑎_𝐍
Note:
𝐓 ⋅ 𝐓 = 1 ∧ 𝐓 ⋅ 𝐍 = 0
DotProductofVelocityandAcceleration
𝑣 ⋅ 𝑎 = 𝑣𝐓 ⋅ 𝑣Þ𝐓+ 𝜅𝑣q𝐍 = 𝑣𝑣Þ𝐓 ⋅ 𝐓+ 𝜅𝑣o𝐓 ⋅ 𝐍 = 𝑣𝑣′
TangentialAcceleration 𝑎^ = 𝑣Þ =
𝑣 ⋅ 𝑎𝑣 =
𝐫Þ 𝑡 ⋅ 𝐫ÞÞ 𝑡𝐫Þ 𝑡
NormalAcceleration𝑎_ = 𝜅𝑣q =
𝐫Þ 𝑡 ×𝐫ÞÞ 𝑡𝐫Þ 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com92
Frenet-SerretFormulas𝑑𝐓𝑑𝑠 = 𝜅𝐍
𝑑𝐍𝑑𝑠 = −𝜅𝐓+ 𝜏𝐁
𝑑𝐁𝑑𝑥 = −𝜏𝐍
PartialDerivativesGivenamultivariablefunctione.g.𝑓 𝑥, 𝑦, 𝑧 ,thenapartialderivativeisthederivativewithrespecttoavariablewheretheothervariablesaretreatingasconstantsi.e.donotimplicitlydifferentiate.𝜕𝑓𝜕𝑥 = 𝑓� = 𝑓� 𝑥, 𝑦, 𝑧
𝜕𝑓𝜕𝑦 = 𝑓¦ = 𝑓¦ 𝑥, 𝑦, 𝑧
𝜕𝑓𝜕𝑧 = 𝑓b = 𝑓b 𝑥, 𝑦, 𝑧
𝜕q𝑓𝜕𝑥q = 𝑓��
𝜕q𝑓𝜕𝑦q = 𝑓¦¦
𝜕q𝑓𝜕𝑧q = 𝑓bb
MixedPartial
𝜕q𝑓𝜕𝑥𝜕𝑦 = 𝑓�¦,
𝜕q𝑓𝜕𝑦𝜕𝑥 = 𝑓¦�
TangentPlane
𝑧 − 𝑧2 = 𝑓� 𝑥2, 𝑦2 𝑥 − 𝑥2 + 𝑓¦ 𝑥2, 𝑦2 𝑦 − 𝑦2
ChainRule𝑑𝑧𝑑𝑡 =
𝜕𝑧𝜕𝑥𝑑𝑥𝑑𝑡 +
𝜕𝑧𝜕𝑦𝑑𝑦𝑑𝑡 , 𝑥 = 𝑥 𝑡 ∧ 𝑦 = 𝑦 𝑡
𝜕𝑧𝜕𝑠 =
𝜕𝑧𝜕𝑥𝜕𝑥𝜕𝑠 +
𝜕𝑧𝜕𝑦𝜕𝑦𝜕𝑠 ,
𝜕𝑧𝜕𝑡 =
𝜕𝑧𝜕𝑥𝜕𝑥𝜕𝑡 +
𝜕𝑧𝜕𝑦𝜕𝑦𝜕𝑡 , 𝑥 = 𝑥 𝑠, 𝑡 ∧ 𝑦 = 𝑦 𝑠, 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com 93
MULTIVARIABLECALCULUS(CALCIII)Magnitude
𝑣 = 𝐯 = 𝑣r, 𝑣q, 𝑣o ⇒ 𝑣 = 𝐯 = 𝑣rq + 𝑣qq + 𝑣oq
UnitVectors
𝑣 =𝑣𝑣 ≡ 𝐯 ≡ 𝐮 =
𝐯𝐯
𝚤 ≡ 𝐢 𝚥 ≡ 𝐣 𝑘 ≡ 𝐤𝚤 = 1, 0, 0 𝚥 = 0, 1, 0 𝑘 = 1, 0, 0 Note:𝑣 = 𝑣r, 𝑣q, 𝑣o = 𝑣r 1, 0, 0 + 𝑣q 0, 1, 0 + 𝑣o 0, 0, 1 = 𝑣r𝚤 + 𝑣q𝚥 + 𝑣o𝑘 = 𝑣r𝐢 + 𝑣q𝐣+ 𝑣o𝐤Dot/CrossProductDot𝑎 ⋅ 𝑏 = 𝐚 ⋅ 𝐛
= 𝑎r, 𝑎q, 𝑎o ⋅ 𝑏r, 𝑏q, 𝑏o
= 𝑎r𝑏r + 𝑎q𝑏q + 𝑎o𝑏o
Properties𝐚 ⋅ 𝐚 = 𝐚 q 𝐚 ⋅ 𝐛 = 𝐛 ⋅ 𝐚
𝐚 ⋅ 𝐛+ 𝐜 = 𝐚 ⋅ 𝐛+ 𝐚 ⋅ 𝐜 k𝐚 ⋅ 𝐛 = k 𝐚 ⋅ 𝐛 = 𝐚 ⋅ k𝐛
Cross𝑎×𝑏 = 𝐚×𝐛 = 𝑎r, 𝑎q, 𝑎o × 𝑏r, 𝑏q, 𝑏o
=𝚤 𝚥 𝑘𝑎r 𝑎q 𝑎o𝑏r 𝑏q 𝑏o
=
𝑎q 𝑎o𝑏q 𝑏o 𝚤 −
𝑎r 𝑎o𝑏r 𝑏o 𝚥 +
𝑎r 𝑎q𝑏r 𝑏q 𝑘
= 𝑎q𝑏o − 𝑏q𝑎o 𝚤 − 𝑎r𝑏o − 𝑏r𝑎o 𝚥 + 𝑎r𝑏q − 𝑏r𝑎q 𝑘

Copyright©WESOLVETHEMLLC|WeSolveThem.com94
Properties𝐚×𝐛 = −𝐛×𝐚
k𝐚 ×𝐛 = k 𝐚×𝐛 = 𝐚× k𝐛
𝐚 ⋅ 𝐛×𝐜 = 𝐚×𝐛 ⋅ 𝐜
𝐚+ 𝐛 ×𝐜 = 𝐚×𝐜 + 𝐛×𝐜
𝐚× 𝐛+ 𝐜 = 𝐚×𝐛+ 𝐚×𝐜 𝐚× 𝐛×𝐜 = 𝐚 ⋅ 𝐜 𝐛− 𝐚 ⋅ 𝐛 𝐜
AnglesBetweenVectors𝑎 ⋅ 𝑏 = 𝑎 𝑏 cos 𝜃 𝑎×𝑏 = 𝑎 𝑏 sin 𝜃
⇒ 𝜃 = arccos𝑎 ⋅ 𝑏𝑎 𝑏
⇒ 𝜃 = arcsin𝑎×𝑏𝑎 𝑏
ProjectionsScalar Vector
compò𝑏 =𝑎 ⋅ 𝑏𝑎 proj𝐚𝑏 =
𝑎 ⋅ 𝑏𝑎 q 𝑎
Areas/VolumeTriangle
Parallelogram
Parallelepiped
𝐴 =12 𝑎×𝑏 𝐴 = 𝑎×𝑏 𝑉 = 𝑎 ⋅ 𝑏×𝑐
Lineℒ 𝑡 = 𝑃2 + 𝑡𝑣
= 𝑥2, 𝑦2, 𝑧2 + 𝑡 𝑎, 𝑏, 𝑐
= 𝑥2 + 𝑎𝑡, 𝑦2 + 𝑏𝑡, 𝑧2 + 𝑐𝑡 = 𝑥2, 𝑦2, 𝑧2 + 𝑡 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2
𝑣 = 𝑃r𝑃q = 𝑃q − 𝑃r
= 𝑥, 𝑦, 𝑧 − 𝑥2, 𝑦2, 𝑧2 = 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2
= 𝑎, 𝑏, 𝑐
LinefromtiptotipAlinesegmentfromthetipstwovectorsbeginningfromtheoriginto𝑣r → 𝑣qis
ℒ 𝑡 = 1 − 𝑡 𝑣r + 𝑡𝑣q, 𝑡 ∈ 0, 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com 95
EquationofaPlane𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑 ⇒ 𝑛 = 𝑎, 𝑏, 𝑐 ⊥ surface𝑛isperpendiculartothesurface 𝑣isintheplane,𝑃2 = 𝑥2, 𝑦2, 𝑧2 (pointinplane)𝑛 ⊥ 𝑣 ⇒ 𝑛 ⋅ 𝑣 = 𝑎, 𝑏, 𝑐 ⋅ 𝑥 − 𝑥2, 𝑦 − 𝑦2, 𝑧 − 𝑧2 = 𝑎 𝑥 − 𝑥2 + 𝑏 𝑦 − 𝑦2 + 𝑐 𝑧 − 𝑧2 = 0VectorFunctions𝑟 𝑡 = 𝑟r 𝑡 , 𝑟q 𝑡 , 𝑟o 𝑡 = 𝑓 𝑡 , 𝑔 𝑡 , ℎ 𝑡
Limit lim©→�
𝑟 𝑡 = lim©→�
𝑓 𝑡 , lim©→�
𝑔 𝑡 , lim©→�
ℎ 𝑡
Derivative 𝑑𝑟𝑑𝑡 = 𝑓Þ 𝑡 , 𝑔Þ 𝑡 , ℎÞ 𝑡
DefiniteIntegral𝑟 𝑡
©�
©:𝑑𝑡 = 𝑟r 𝑡
©�
©:𝑑𝑡 𝚤 + 𝑟q 𝑡
©�
©:𝑑𝑡 𝚥 + 𝑟o 𝑡
©�
©:𝑑𝑡 𝑘
IndefiniteIntegral 𝑟 𝑡 𝑑𝑡 = 𝑟r 𝑡 𝑑𝑡 𝚤 + 𝑟q 𝑡 𝑑𝑡 𝚥 + 𝑟o 𝑡 𝑑𝑡 𝑘 + 𝐶
DifferentiationRulesNote:𝑣 𝑡 , 𝑢 𝑡 , 𝑓 𝑡 FunctiondotVector VectorcrossVector
𝑑𝑑𝑡 𝑓 𝑡 ⋅ 𝑢 𝑡 = 𝑢 𝑡
𝑑𝑓𝑑𝑡 + 𝑓 𝑡
𝑑𝑢𝑑𝑡
𝑑𝑑𝑡 𝑢 𝑡 ×𝑣 𝑡 =
𝑑𝑢𝑑𝑡 ×𝑣 𝑡 + 𝑢 𝑡 ×
𝑑𝑣𝑑𝑡
VectordotVector ChainRule
𝑑𝑑𝑡 𝑢 𝑡 ⋅ 𝑣 𝑡 = 𝑣 𝑡 ⋅
𝑑𝑢𝑑𝑡 + 𝑢 𝑡 ⋅
𝑑𝑣𝑑𝑡
𝑑𝑑𝑡 𝑢 𝑓 𝑡 = 𝑢Þ 𝑓 𝑡 𝑓Þ 𝑡
Arclength
𝐿 =𝑑𝑟r𝑑𝑡
q
+𝑑𝑟q𝑑𝑡
q
+𝑑𝑟o𝑑𝑡
q©�
©:𝑑𝑡 = 𝑓Þ 𝑡 q + 𝑔Þ 𝑡 q + ℎÞ 𝑡 q
©�
©:𝑑𝑡 =
𝑑𝑟𝑑𝑡
©�
©:𝑑𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com96
TangentsUnitTangentVector
𝐓 𝑡 =𝐫Þ 𝑡𝐫Þ 𝑡 , 𝐫Þ 𝑡 =
𝑑𝑠𝑑𝑡
Curvature1𝜅(𝑡) =
𝑑𝐓𝑑𝑠 =
𝑑𝐓𝑑𝑡𝑑𝑡𝑑𝑠 =
𝑑𝐓𝑑𝑡𝑑𝑠𝑑𝑡
=𝐓Þ 𝑡𝐫Þ 𝑡
Curvature2(vectorfunction)𝜅(𝑡) =
𝐫Þ 𝑡 ×𝐫ÞÞ 𝑡𝐫Þ 𝑡 o
Curvature3(singlevariable)𝜅(𝑥) =
𝑓ÞÞ 𝑥
1 + 𝑓Þ 𝑥 qoq
Curvature4(parametric)𝜅 𝑡 =
𝑥Þ 𝑡 𝑦ÞÞ 𝑡 − 𝑦Þ 𝑡 𝑥ÞÞ 𝑡
𝑥Þ 𝑡 q + 𝑦Þ 𝑡 qoq
NormalVector𝐍 𝑡 =
𝐓Þ 𝑡𝐓Þ 𝑡
BinormalVector 𝐁 𝑡 = 𝐓 𝑡 ×𝐍 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com 97
TangentialandNormalComponents(acceleration)PhysicsNotationsPosition 𝑟 𝑡 ≡ 𝐫 𝑡
Velocity 𝑣 𝑡 = 𝑟Þ 𝑡 =
𝑑𝑟𝑑𝑡 =
𝑑𝐫𝑑𝑡 = 𝐫Þ 𝑡
Speed
𝑣 = 𝑣 𝑡 = 𝑟Þ 𝑡
Acceleration 𝑎 𝑡 = 𝑣Þ 𝑡 = 𝑟ÞÞ 𝑡
𝐓 𝑡 =𝐫Þ 𝑡𝐫Þ 𝑡 =
𝑣 𝑡𝑣 𝑡 =
𝑣𝑣
𝑣 = 𝑣𝐓 ⇒ 𝑑𝑣𝑑𝑡 = 𝑎 = 𝑣Þ𝐓+ 𝑣𝐓′
Curvature𝜅 =
𝐓Þ
𝐫Þ =𝐓Þ
𝑣 ⇒ 𝜅𝑣 = 𝐓′
TangentialComponent(acceleration) 𝑎^ =𝑑𝑑𝑡 𝑟
Þ =𝑑𝑣𝑑𝑡 = 𝑣Þ, 𝑣 = 𝑣 = 𝑟′ ≡ 𝐫′
NormalComponent(acceleration) 𝑎_ = 𝜅𝑣q
Acceleration
𝒂 = 𝑣Þ𝐓+ 𝜅𝑣q𝐍 = 𝑎^𝐓+ 𝑎_𝐍
Note:
𝐓 ⋅ 𝐓 = 1 ∧ 𝐓 ⋅ 𝐍 = 0
DotProductofVelocityandAcceleration
𝑣 ⋅ 𝑎 = 𝑣𝐓 ⋅ 𝑣Þ𝐓+ 𝜅𝑣q𝐍 = 𝑣𝑣Þ𝐓 ⋅ 𝐓+ 𝜅𝑣o𝐓 ⋅ 𝐍 = 𝑣𝑣′
TangentialAcceleration 𝑎^ = 𝑣Þ =
𝑣 ⋅ 𝑎𝑣 =
𝐫Þ 𝑡 ⋅ 𝐫ÞÞ 𝑡𝐫Þ 𝑡
NormalAcceleration𝑎_ = 𝜅𝑣q =
𝐫Þ 𝑡 ×𝐫ÞÞ 𝑡𝐫Þ 𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com98
Frenet-SerretFormulas𝑑𝐓𝑑𝑠 = 𝜅𝐍
𝑑𝐍𝑑𝑠 = −𝜅𝐓+ 𝜏𝐁
𝑑𝐁𝑑𝑥 = −𝜏𝐍
PartialDerivativesGivenamultivariablefunctione.g.𝑓 𝑥, 𝑦, 𝑧 ,thenapartialderivativeisthederivativewithrespecttoavariablewheretheothervariablesaretreatingasconstantsi.e.donotimplicitlydifferentiate.𝜕𝑓𝜕𝑥 = 𝑓� = 𝑓� 𝑥, 𝑦, 𝑧
𝜕𝑓𝜕𝑦 = 𝑓¦ = 𝑓¦ 𝑥, 𝑦, 𝑧
𝜕𝑓𝜕𝑧 = 𝑓b = 𝑓b 𝑥, 𝑦, 𝑧
𝜕q𝑓𝜕𝑥q = 𝑓��
𝜕q𝑓𝜕𝑦q = 𝑓¦¦
𝜕q𝑓𝜕𝑧q = 𝑓bb
MixedPartial
𝜕q𝑓𝜕𝑥𝜕𝑦 = 𝑓�¦,
𝜕q𝑓𝜕𝑦𝜕𝑥 = 𝑓¦�
EquationofaPlane
𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑NormalVectorThenormalvector𝑛 = 𝑎, 𝑏, 𝑐 ,isextractedfromtheequationofaplane,andthenormalvectorisperpendiculartothesurface.Distance/VectorBetweenPointsVectorfromtwopoints
𝑃r 𝑎, 𝑏, 𝑐 ∧ 𝑃q 𝑑, 𝑒, 𝑓 ⇒ 𝑃r𝑃q = 𝑃q − 𝑃r = 𝑑 − 𝑎, 𝑒 − 𝑏, 𝑓 − 𝑐
𝑃r𝑃q = 𝑑 − 𝑎 q + 𝑒 − 𝑏 q + 𝑓 − 𝑐 qTangentPlane
𝑧 − 𝑧2 = 𝑓� 𝑥2, 𝑦2 𝑥 − 𝑥2 + 𝑓¦ 𝑥2, 𝑦2 𝑦 − 𝑦2

Copyright©WESOLVETHEMLLC|WeSolveThem.com 99
Equationofasphere
𝑥 − ℎ q + 𝑦 − 𝑘 q + 𝑧 − 𝑙 q = 𝑟q, center: ℎ, 𝑘, 𝑙 radius: 𝑟
ChainRule𝑑𝑧𝑑𝑡 =
𝜕𝑧𝜕𝑥𝑑𝑥𝑑𝑡 +
𝜕𝑧𝜕𝑦𝑑𝑦𝑑𝑡 , 𝑥 = 𝑥 𝑡 ∧ 𝑦 = 𝑦 𝑡
𝜕𝑧𝜕𝑠 =
𝜕𝑧𝜕𝑥𝜕𝑥𝜕𝑠 +
𝜕𝑧𝜕𝑦𝜕𝑦𝜕𝑠 ,
𝜕𝑧𝜕𝑡 =
𝜕𝑧𝜕𝑥𝜕𝑥𝜕𝑡 +
𝜕𝑧𝜕𝑦𝜕𝑦𝜕𝑡 , 𝑥 = 𝑥 𝑠, 𝑡 ∧ 𝑦 = 𝑦 𝑠, 𝑡
Gradient𝜵𝒇Thesymbol𝛻iscallednablaordel;𝜕iscalledpartialordel.Itwouldbeappropriatetouse“del”asdelisforpartialderivativesjustasnablais.Thegradientof𝑓isnotedas𝛻𝑓,andisequalthevectorfunctionofpartialsi.e.
𝛻𝑓 =𝜕𝑓𝜕𝑥 𝐢 +
𝜕𝑓𝜕𝑦 𝐣+
𝜕𝑓𝜕𝑧 𝐤
DirectionalDerivativeGiven𝑓 𝑥, 𝑦, 𝑧 ,𝑣 = 𝑣r, 𝑣q, 𝑣o ,and𝑃 𝑥2, 𝑦2, 𝑧2
𝐷𝐮𝑓 ≡ 𝛻𝑓 𝑥2, 𝑦2, 𝑧e ⋅ 𝐮 ≡ 𝛻𝑓 𝑥2, 𝑦2, 𝑧e ⋅𝑣𝑣
𝐷𝐮𝑓 =1𝑣 𝑓� 𝑥2, 𝑦2, 𝑧e , 𝑓¦ 𝑥2, 𝑦2, 𝑧e , 𝑓b 𝑥2, 𝑦2, 𝑧e ⋅ 𝑣r, 𝑣q, 𝑣o
Differentials
𝑑𝑓 = 𝑓� 𝑥, 𝑦 𝛥𝑥 + 𝑓¦ 𝑥, 𝑦 𝛥𝑦 + 𝑓b 𝑥, 𝑦 𝛥𝑧ImplicitDifferentiation
𝜕𝑧𝜕𝑥 = −
𝜕𝐹𝜕𝑥𝜕𝐹𝜕𝑧
∧ 𝜕𝑧𝜕𝑦 = −
𝜕𝐹𝜕𝑦𝜕𝐹𝜕𝑧

Copyright©WESOLVETHEMLLC|WeSolveThem.com100
ExtremaGivenathree-dimensionalfunction𝑓,wecanfindtheextremabyusingpartialderivatives,andderivativetests.Process:Set𝑓� = 0 Set𝑓¦ = 0 Solvefor
𝑥, 𝑦 = 𝑐r, 𝑐q (criticalpoint)Evaluate𝑓�� 𝑐r, 𝑐q 𝑓¦¦ 𝑓�¦ 𝑓¦� True:𝑓�¦ = 𝑓¦�
𝐷 =𝑓�� 𝑓�¦𝑓¦� 𝑓¦¦
= 𝑓��𝑓¦¦ − 𝑓�¦q
LocalMin:𝐷 > 0and𝑓�� 𝑐r, 𝑐q > 0LocalMax:𝐷 > 0and𝑓�� 𝑐r, 𝑐q < 0Saddle:𝐷 < 0LagrangeMultipliersThesearelikepuzzlesi.e.thesetupisprettystraightforward,butyoumayneedtomakemultipleattemptstofindtherightpattern.2DGiven𝑓 𝑥, 𝑦 (function)and𝑔 𝑥, 𝑦 = 𝑘(constraint)then𝛻𝑓 𝑥, 𝑦 = 𝜆𝛻𝑔 𝑥, 𝑦 Solvethefollowingsystem:𝑓� = 𝜆𝑔� 𝑓¦ = 𝜆𝑔¦ 𝑔 𝑥, 𝑦 = 𝑘3DGiven𝑓 𝑥, 𝑦, 𝑧 (function)and𝑔 𝑥, 𝑦, 𝑧 = 𝑘(constraint)then𝛻𝑓 𝑥, 𝑦, 𝑧 = 𝜆𝛻𝑔 𝑥, 𝑦, 𝑧 Solvethefollowingsystem:𝑓� = 𝜆𝑔� 𝑓¦ = 𝜆𝑔¦ 𝑓b = 𝜆𝑔b 𝑔 𝑥, 𝑦, 𝑧 = 𝑘Onceyoufindallpossiblevalues,thenyousimplyplugtheminto𝑓,andseewhichislargest/smallest.Thesearethenyourmax/min.

Copyright©WESOLVETHEMLLC|WeSolveThem.com 101
TwoConstraints
𝛻𝑓 𝑥, 𝑦, 𝑧 = 𝜆𝛻𝑔 𝑥, 𝑦, 𝑧 + 𝜇𝛻ℎ 𝑥, 𝑦, 𝑧 𝑓� = 𝜆𝑔� + 𝜇ℎ� 𝑓¦ = 𝜆𝑔¦ + 𝜇ℎ¦ 𝑓b = 𝜆𝑔b + 𝜇ℎb 𝑔 𝑥, 𝑦, 𝑧 = 𝑘r ℎ 𝑥, 𝑦, 𝑧 = 𝑘q
MultipleIntegralsDouble
𝑓 𝑥, 𝑦»
�
�
�𝑑𝑦𝑑𝑥 ≡ 𝑓 𝑥, 𝑦
ß𝑑𝐴, 𝑅 = 𝑥, 𝑦 𝑥 ∈ 𝑎, 𝑏 , 𝑦 ∈ 𝑐, 𝑑 ≡ 𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑
Note1:
𝑓 𝑥, 𝑦»
�
�
�𝑑𝑦𝑑𝑥 = 𝑓 𝑥, 𝑦
�
�
»
�𝑑𝑥𝑑𝑦 ⇔ 𝑎 ≤ 𝑥 ≤ 𝑏 ∧ 𝑐 ≤ 𝑦 ≤ 𝑑
Note2:𝑓 𝑥, 𝑦 = 𝑓 𝑥 𝑔 𝑦
𝑓 𝑥, 𝑦»
�
�
�𝑑𝑦𝑑𝑥 = 𝑓 𝑥 𝑔 𝑦
»
�
�
�𝑑𝑦𝑑𝑥 = 𝑔 𝑦
»
�𝑑𝑦 𝑓 𝑥
�
�𝑑𝑥
AverageValue
1𝑑 − 𝑐
1𝑏 − 𝑎 𝑓 𝑥, 𝑦
»
�
�
�𝑑𝑦𝑑𝑥
TypeI
𝑓 𝑥, 𝑦h
𝑑𝐴 = 𝑓 𝑥, 𝑦È� �
È: �
�
�𝑑𝑦𝑑𝑥, 𝐷 = 𝑥, 𝑦 𝑥 ∈ 𝑎, 𝑏 , 𝑦 ∈ 𝑔r 𝑥 , 𝑔q 𝑥
TypeII
𝑓 𝑥, 𝑦h
𝑑𝐴 = 𝑓 𝑥, 𝑦ã� ¦
ã: ¦
»
�𝑑𝑥𝑑𝑦, 𝐷 = 𝑥, 𝑦 𝑥 ∈ ℎr 𝑦 , ℎq 𝑦 , 𝑦 ∈ 𝑐, 𝑑

Copyright©WESOLVETHEMLLC|WeSolveThem.com102
Polar𝑟q = 𝑥q + 𝑦q 𝑥 = 𝑟 cos 𝜃 𝑦 = 𝑟 sin 𝜃
𝑓 𝑥, 𝑦ß
𝑑𝐴 = 𝑟𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃Ô�
Ô:
<�
<:𝑑𝑟𝑑𝜃, 𝑅 = 𝑟, 𝜃 𝑟 ∈ 𝑟r, 𝑟q , 𝜃 ∈ 𝜃r, 𝜃q
Note:Donotforgettheextra𝑟multipliedby𝑓TypeIII𝑓iscontinuousonapolarregion
𝑓 𝑥, 𝑦ß
𝑑𝐴 = 𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟È� <
È: <
<�
<:𝑑𝑟𝑑𝜃,
𝑅 = 𝑟, 𝜃 𝑟 ∈ 𝑔r 𝜃 , 𝑔q 𝜃 , 𝜃 ∈ 𝜃r, 𝜃q
Moments&CenterofMassMoments𝑀� 𝑦𝜌 𝑥, 𝑦
h𝑑𝐴
𝑀¦ 𝑥𝜌 𝑥, 𝑦h
𝑑𝐴
Centerofmass
𝑥 =𝑀¦
𝑚 1𝑚 𝑦𝜌 𝑥, 𝑦
h𝑑𝐴, 𝑚 = 𝜌 𝑥, 𝑦
h𝑑𝐴
𝑦 =𝑀�
𝑚 1𝑚 𝑥𝜌 𝑥, 𝑦
h𝑑𝐴, 𝑚 = 𝜌 𝑥, 𝑦
h𝑑𝐴
MomentofInertia𝐼� 𝑦q𝜌 𝑥, 𝑦
h𝑑𝐴
𝐼¦ 𝑥q𝜌 𝑥, 𝑦h
𝑑𝐴
𝐼2(aboutorigin) 𝑥q + 𝑦q 𝜌 𝑥, 𝑦h
𝑑𝐴
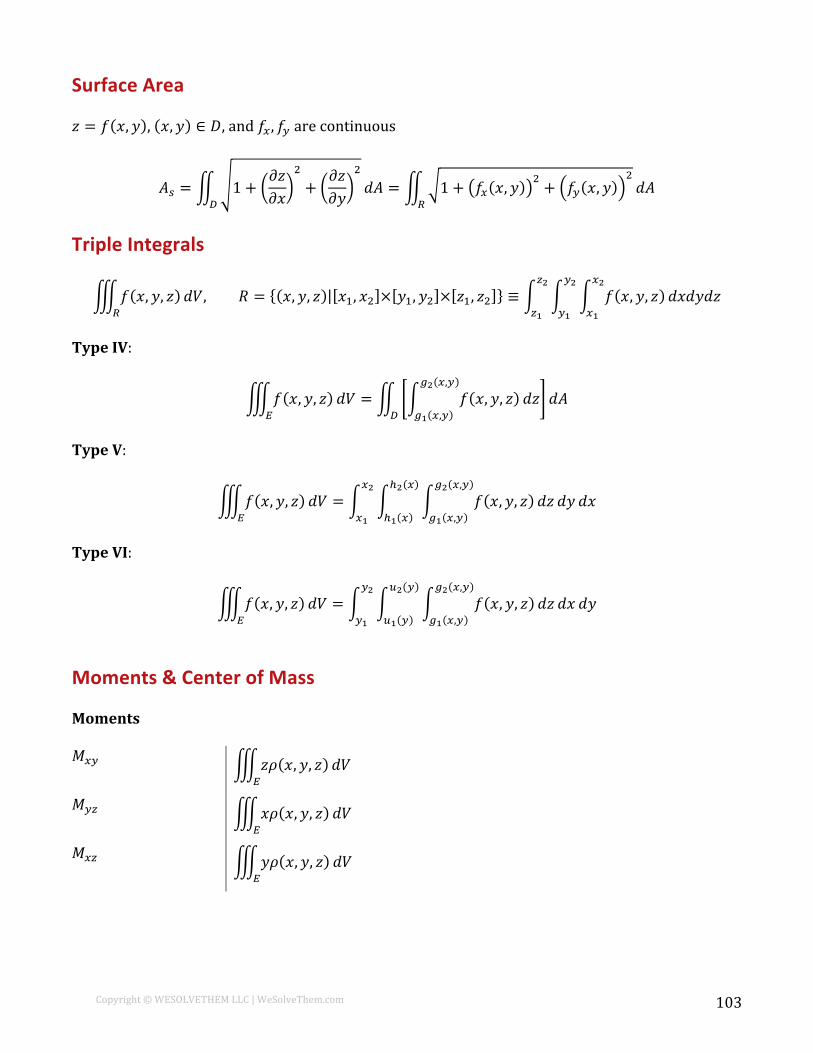
Copyright©WESOLVETHEMLLC|WeSolveThem.com 103
SurfaceArea𝑧 = 𝑓 𝑥, 𝑦 , 𝑥, 𝑦 ∈ 𝐷,and𝑓�, 𝑓¦arecontinuous
𝐴Û = 1 +𝜕𝑧𝜕𝑥
q
+𝜕𝑧𝜕𝑦
q
h𝑑𝐴 = 1 + 𝑓� 𝑥, 𝑦
q + 𝑓¦ 𝑥, 𝑦q
ß𝑑𝐴
TripleIntegrals
𝑓 𝑥, 𝑦, 𝑧ß
𝑑𝑉, 𝑅 = 𝑥, 𝑦, 𝑧 𝑥r, 𝑥q × 𝑦r, 𝑦q × 𝑧r, 𝑧q ≡ 𝑓 𝑥, 𝑦, 𝑧��
�:
¦�
¦:
b�
b:𝑑𝑥𝑑𝑦𝑑𝑧
TypeIV:
𝑓 𝑥, 𝑦, 𝑧i
𝑑𝑉 = 𝑓 𝑥, 𝑦, 𝑧È� �,¦
È: �,¦𝑑𝑧
h𝑑𝐴
TypeV:
𝑓 𝑥, 𝑦, 𝑧i
𝑑𝑉 = 𝑓 𝑥, 𝑦, 𝑧È� �,¦
È: �,¦𝑑𝑧
ã� �
ã: �𝑑𝑦
��
�:𝑑𝑥
TypeVI:
𝑓 𝑥, 𝑦, 𝑧i
𝑑𝑉 = 𝑓 𝑥, 𝑦, 𝑧È� �,¦
È: �,¦𝑑𝑧
3� ¦
3: ¦𝑑𝑥
¦�
¦:𝑑𝑦
Moments&CenterofMassMoments𝑀�¦ 𝑧𝜌 𝑥, 𝑦, 𝑧
i𝑑𝑉
𝑀¦b 𝑥𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉
𝑀�b 𝑦𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉

Copyright©WESOLVETHEMLLC|WeSolveThem.com104
CenterofMassThecentroidof𝐸isthecenterofmass(𝑥, 𝑦, 𝑧)forconstantdensity.
𝑚 = 𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉
𝑥 =𝑀¦b
𝑚 𝑦 =𝑀�b
𝑚 𝑧 =𝑀�¦
𝑚 MomentsofInertia
𝐼� = 𝑦q + 𝑧q 𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉 𝐼¦ = 𝑥q + 𝑧q 𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉 𝐼b = 𝑥q + 𝑦q 𝜌 𝑥, 𝑦, 𝑧i
𝑑𝑉
CylindricalCoordinates𝑟q = 𝑥q + 𝑦q tan 𝜃 =
𝑦𝑥
𝑥 = 𝑟 cos 𝜃 𝑦 = 𝑟 sin 𝜃 𝑧 = 𝑧
𝑓 𝑥, 𝑦, 𝑧i
𝑑𝑉 = 𝑟𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 , 𝑧ã� Ô jk/ <,Ô /ó¯<
ã: Ô jk/ <,Ô /ó¯<
� <
È: <
<�
<:𝑑𝑧𝑑𝑟𝑑𝜃
Note:Donotforgettheextra𝑟SphericalCoordinates𝑥 = 𝜌 sin𝜙 cos 𝜃 𝑦 = 𝜌 sin𝜙 sin 𝜃 𝑧 = 𝜌 cos𝜙 𝜌q = 𝑥q + 𝑦q + 𝑧q
𝐸 = 𝜌, 𝜃,𝜙 𝜌 ∈ 𝜌r,𝜌q , 𝜃 ∈ 𝜃r, 𝜃q ,𝜙 ∈ 𝜙r,𝜙q
𝑓 𝑥, 𝑦, 𝑧i
𝑑𝑉 = 𝑓 𝜌 sin𝜙 cos 𝜃 ,𝜌 sin𝜙 sin 𝜃 ,𝜌 cos𝜙 𝜌q sin𝜙m�
m:
<�
<:
n�
n:𝑑𝜌𝑑𝜃𝑑𝜙
ChangeofVariables2DJacobian
𝜕 𝑥, 𝑦𝜕 𝑢, 𝑣 =
𝜕𝑥𝜕𝑢
𝜕𝑥𝜕𝑣
𝜕𝑦𝜕𝑢
𝜕𝑦𝜕𝑣
=𝜕𝑥𝜕𝑢
𝜕𝑦𝜕𝑣 −
𝜕𝑥𝜕𝑣𝜕𝑦𝜕𝑢 , 𝑥 = 𝑥 𝑢, 𝑣 ∧ 𝑦 = 𝑦 𝑢, 𝑣
𝑓 𝑥, 𝑦ß
𝑑𝐴 = 𝑓 𝑥 𝑢, 𝑣 , 𝑦 𝑢, 𝑣o
abs𝜕 𝑥, 𝑦𝜕 𝑢, 𝑣 𝑑𝑢𝑑𝑣

Copyright©WESOLVETHEMLLC|WeSolveThem.com 105
Note:Donotconfusethedeterminantwiththeabsolutevaluei.e.
𝜕𝑥𝜕𝑢
𝜕𝑥𝜕𝑣
𝜕𝑦𝜕𝑢
𝜕𝑦𝜕𝑣
≠𝜕 𝑥, 𝑦𝜕 𝑢, 𝑣 = abs
𝜕𝑥𝜕𝑢
𝜕𝑥𝜕𝑣
𝜕𝑦𝜕𝑢
𝜕𝑦𝜕𝑣
3DJacobian
𝐽 =
𝜕𝑥𝜕𝑢
𝜕𝑥𝜕𝑣
𝜕𝑥𝜕𝑤
𝜕𝑦𝜕𝑢
𝜕𝑦𝜕𝑣
𝜕𝑦𝜕𝑤
𝜕𝑧𝜕𝑢
𝜕𝑧𝜕𝑣
𝜕𝑧𝜕𝑤
, 𝑥 = 𝑥 𝑢, 𝑣,𝑤 ∧ 𝑦 = 𝑦 𝑢, 𝑣,𝑤 ∧ 𝑧 = 𝑧 𝑢, 𝑣,𝑤
𝑓 𝑥, 𝑦, 𝑧r
𝑑𝑉 ⇒ 𝑑𝑉 = 𝐽 𝑑𝑢𝑑𝑣𝑑𝑤, 𝐽 =𝜕 𝑥, 𝑦𝜕 𝑢, 𝑣
LineIntegralsGeneralSmooth
𝑓 𝑥, 𝑦á
𝑑𝑠 = 𝑓 𝑥 𝑡 , 𝑦 𝑡 𝑥Þ 𝑡 q + 𝑦Þ 𝑡 q©�
©:𝑑𝑡
NotSmooth
𝑓 𝑥, 𝑦á
𝑑𝑠 = 𝑓 𝑥, 𝑦á:
𝑑𝑠 + 𝑓 𝑥, 𝑦á�
𝑑𝑠 + ⋯ 𝑓 𝑥, 𝑦á�
𝑑𝑠
𝒙, 𝒚DerivativesRespectto𝑥 𝑓 𝑥, 𝑦
á𝑑𝑥 𝑓 𝑥 𝑡 , 𝑦 𝑡 𝑥Þ 𝑡
©�
©:𝑑𝑡
Respectto𝑦 𝑓 𝑥, 𝑦á
𝑑𝑦 𝑓 𝑥 𝑡 , 𝑦 𝑡 𝑦Þ 𝑡©�
©:𝑑𝑡
Note:Changingdirectionof𝑥, 𝑦 𝑓 𝑥, 𝑦
pá𝑑𝑠 = − 𝑓 𝑥, 𝑦
á𝑑𝑠
Arclength 𝑓 𝑥, 𝑦pá
𝑑𝑠 = 𝑓 𝑥, 𝑦á
𝑑𝑠

Copyright©WESOLVETHEMLLC|WeSolveThem.com106
Vectorform
𝑓 𝑥, 𝑦, 𝑧á
𝑑𝑠 = 𝑓 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡 𝑥Þ 𝑡 q + 𝑦Þ 𝑡 q + 𝑧Þ 𝑡 q©�
©:𝑑𝑡
∵ 𝐫 𝑡 = 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡 ∧ 𝐫 𝑡 = 𝑥Þ 𝑡 q + 𝑦Þ 𝑡 q + 𝑧Þ 𝑡 q
∴ 𝑓 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡 𝑥Þ 𝑡 q + 𝑦Þ 𝑡 q + 𝑧Þ 𝑡 q©�
©:𝑑𝑡 = 𝑓 𝐫 𝑡 𝐫 𝑡
©�
©:𝑑𝑡
Respectto𝒛
𝑓 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡 𝑧Þ 𝑡©�
©:𝑑𝑡
MultipleFunctions𝑷,𝑸, 𝑹
𝑃 𝑥, 𝑦, 𝑧á
𝑑𝑥 + 𝑄 𝑥, 𝑦, 𝑧 𝑑𝑦 + 𝑅 𝑥, 𝑦, 𝑧 𝑑𝑧 = 𝑔r 𝑡 + 𝑔q 𝑡 + 𝑔o ©
©�
©:𝑑𝑡
WorkCaseI 𝑊 = 𝐅 𝑥, 𝑦, 𝑧 ⋅ 𝐓 𝑥, 𝑦, 𝑧
á𝑑𝑠
CaseII 𝑊 = 𝐅 ⋅ 𝐓
á𝑑𝑠
CaseIII
𝑊 = 𝐅 𝐫 𝑡 ⋅𝐫Þ 𝑡𝐫Þ 𝑡
©�
©:𝐫Þ 𝑡 𝑑𝑡
CaseIV
𝑊 = 𝐅 𝐫 𝑡 ⋅ 𝐫Þ 𝑡©�
©:𝑑𝑡
CaseV 𝑊 = 𝐅 𝐫 𝑡 ⋅ 𝑑𝐫
á
CaseVI 𝑊 = 𝑃𝑑𝑥 + 𝑄𝑑𝑦 + 𝑅𝑑𝑧
á, 𝐅 = 𝑃,𝑄, 𝑅

Copyright©WESOLVETHEMLLC|WeSolveThem.com 107
GradientLineIntegralCaseI:FundamentalTheorem 𝛻𝑓 ⋅ 𝑑𝐫
á= 𝑓 𝐫 𝑡q − 𝑓 𝐫 𝑡r
CaseII 𝛻𝑓 ⋅ 𝑑𝐫
á= 𝑓 xq, yq, 𝑧q − 𝑓 xr, 𝑦r, 𝑧r
CaseIII
𝛻𝑓 𝐫 𝑡 ⋅ 𝐫Þ 𝑡©�
©:𝑑𝑡 =
𝜕𝑓𝜕𝑥𝑑𝑥𝑑𝑡 +
𝜕𝑓𝜕𝑦𝑑𝑦𝑑𝑡 +
𝜕𝑓𝜕𝑧𝑑𝑧𝑑𝑡
©�
©:𝑑𝑡
CaseIV 𝑑
𝑑𝑡
©�
©:𝑓 𝐫 𝑡 𝑑𝑡 = 𝑓 𝐫 𝑡q − 𝑓 𝐫 𝑡r
ConservativeVectorField
𝛻𝑓 = 𝐅 x, y = 𝑃 x, y , 𝑄 x, y ∧ 𝜕𝑃𝜕𝑦 =
𝜕𝑄𝜕𝑥
Green’sTheorem
𝑃𝑑𝑥 + 𝑄𝑑𝑦á
=𝜕𝑄𝜕𝑥 −
𝜕𝑃𝜕𝑦h
𝑑𝐴
Curl𝜵Note:gradientof𝑓is𝛻𝑓,andcurl/divergenceof𝑓is𝛻×𝛻𝑓and𝛻 ⋅ 𝛻𝑓,where𝛻(nabla)isreferredtoasdel.
𝛻 =𝜕𝜕𝑥 𝐢 +
𝜕𝜕𝑦 𝐣+
𝜕𝜕𝑧 𝐤 ≡ 𝜕�,𝜕¦,𝜕b
𝛻×𝛻𝑓 = 𝛻×𝐅 =𝐢 𝐣 𝐤𝜕� 𝜕¦ 𝜕b𝜕�² 𝜕¦
² 𝜕b², 𝜕�
²,𝜕¦²,𝜕b
² ≡𝜕𝑓𝜕𝑥 𝐢 +
𝜕𝑓𝜕𝑦 𝐣+
𝜕𝑓𝜕 𝐤
Conservativeifcurl𝐅 = 0Divergence
𝛻 ⋅ 𝛻𝑓 = 𝛻 ⋅ 𝐅 = 𝜕�,𝜕¦,𝜕b ⋅ 𝜕�²,𝜕¦
²,𝜕b²
StokesTheorem

Copyright©WESOLVETHEMLLC|WeSolveThem.com108
𝛻𝑓 ⋅ 𝑑𝐫á
= 𝐅 ⋅ 𝑑𝐫á
= ∇×𝐅o
⋅ 𝑑𝐒 = curl𝐅o
⋅ 𝑑𝐒
DivergenceTheorem
𝐅o⋅ 𝑑𝐒 = 𝛻 ⋅ 𝛻𝑓
i𝒅𝑽 = 𝛻 ⋅ 𝐅
i𝑑𝑉 = div𝐅
i𝑑𝑉
PreCalculusReviewArithmetic
𝑎𝑏 ± 𝑎𝑐 = 𝑎 𝑏 ± 𝑐 = 𝑏 ± 𝑐 𝑎𝑎𝑏𝑐 =
𝑎𝑏𝑐
𝑎𝑏 ±
𝑐𝑑 =
𝑎𝑑 ± 𝑏𝑐𝑏𝑑
𝑎 − 𝑏𝑐 − 𝑑 =
𝑏 − 𝑎𝑑 − 𝑐
𝑎𝑏 + 𝑎𝑐𝑎 = 𝑏 + 𝑐, 𝑎 ≠ 0𝑎
𝑏𝑐 =
𝑎𝑏𝑐
𝑎𝑏𝑐=
𝑎1 ∙
𝑐𝑏 =
𝑎𝑐𝑏
𝑎 ± 𝑏𝑐 =
𝑎𝑐 ±
𝑏𝑐
𝑎𝑏𝑐𝑑
=𝑎𝑏 ∙𝑑𝑐 =
𝑎𝑑𝑏𝑐
Exponential
𝑎r = 𝑎𝑎2 = 1𝑎p0 =1𝑎0
1𝑎p0 = 𝑎0𝑎0𝑎� = 𝑎0��
𝑎0
𝑎� = 𝑎0p� 𝑎𝑏
0=𝑎0
𝑏0 𝑎𝑏
p0=𝑏0
𝑎0 𝑎0
r� = 𝑎
r�
0 𝑎0 � = 𝑎� 0
Radicals
𝑎��= 𝑎�� = 𝑎
r�0 𝑎0� = 𝑎, 𝑛𝑖𝑠𝑜𝑑𝑑 𝑎0� = 𝑎 , 𝑛𝑖𝑠𝑒𝑣𝑒𝑛
𝑎 = 𝑎� = 𝑎r� = 𝑎rq 𝑎�� = 𝑎
�0
𝑎𝑏
�=
𝑎�
𝑏� =𝑎r0
𝑏r0=
𝑎𝑏
r0
Fractions
𝑎𝑏 ±
𝑐𝑑 =
𝑎𝑑 ± 𝑏𝑐𝑏𝑑
𝑔 𝑥𝑓 𝑥 ±
ℎ 𝑥𝑟 𝑥 =
𝑔 𝑥 𝑟 𝑥 ± 𝑓 𝑥 ℎ 𝑥𝑓 𝑥 𝑟 𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 109
Logarithmicln 𝑏ln 𝑎 = log� 𝑏 𝑦 = log� 𝑥 ⇔ 𝑥 = 𝑏¦𝑒 ≈ 2.72 log� 𝑎 = 1
log� 1 = 0 log� 𝑎3 = 𝑢 log¤ 𝑢 = ln 𝑢 log� 𝑢� = 𝑏 log� 𝑢
log� 𝑢𝑣 = log� 𝑢 + log� 𝑣 log�𝑢𝑣 = log� 𝑢 − log� 𝑣 log� 𝑏 =
ln 𝑏ln 𝑎
𝑣 = ln 𝑢 ⇒ 𝑢 = 𝑒4𝑣 = 𝑒3 ⇒ 𝑢 = ln 𝑣 𝑒 =1𝑛!
«
012
ln 𝑎 = undefined, 𝑎 ≤ 0 ln 1 = 0 ln 𝑒3 = 𝑢 ⇒ 𝑒®¯3 = 𝑢ln 𝑒r = 1 ⇒ 𝑒®¯ r = 1 ln 𝑢� = 𝑏 ln 𝑢 ln 𝑢𝑣 = ln 𝑢 + ln 𝑣 ln
𝑢𝑣 = ln 𝑢 − ln 𝑣
OtherFormulas/Equations
QuadraticFormula
𝑎𝑥q + 𝑏𝑥 + 𝑐 = 0 ⇒ 𝑥 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎
DiscriminantTwoRealSolutions𝑏q − 4𝑎𝑐 > 0RepeatedSolution𝑏q − 4𝑎𝑐 = 0ComplexSolution 𝑥 = 𝛼 ± 𝛽𝑖 if𝑏q − 4𝑎𝑐 < 0
CompletetheSquare
𝑦 = 𝑎𝑥q + 𝑏𝑥 + 𝑐 ⇒ 𝑦 = 𝑎 𝑥 +𝑏2𝑎
q
+ 𝑐 −𝑏q
4𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com110
OtherFormulasDistanceFormula
MidpointFormula
𝐷 = 𝑥 − 𝑥2 q + 𝑦 − 𝑦2 q
𝑀 =𝑥 + 𝑥22 ,
𝑦 + 𝑦22
EquationofaLine
𝑠𝑙𝑜𝑝𝑒 = 𝑚 =𝑦q − 𝑦r𝑥q − 𝑥r
𝑦 = 𝑚𝑥 + 𝑏
𝑦q − 𝑦r = 𝑚 𝑥q − 𝑥r
𝐴𝑥 + 𝐵𝑦 = 𝐶
EquationofParabolaVertex: ℎ, 𝑘
𝑦 = 𝑎𝑥q + 𝑏𝑥 + 𝑐
𝑦 = 𝑎 𝑥 − ℎ q + 𝑘
EquationofCircleCenter: ℎ, 𝑘 Radius:𝑟
𝑥 − ℎ q + 𝑦 − 𝑘 q = 𝑟q
EquationofEllipse
RightPoint: ℎ + 𝑎, 𝑘
LeftPoint: ℎ − 𝑎, 𝑘
TopPoint: ℎ, 𝑘 + 𝑏
BottomPoint: ℎ, 𝑘 − 𝑏
𝑥 − ℎ q
𝑎q +𝑦 − 𝑘 q
𝑏q = 1
EquationofHyperbolaCenter: ℎ, 𝑘 Slope:± �
�
Asymptotes:𝑦 = ± ��𝑥 − ℎ + 𝑘
Vertices: ℎ + 𝑎, 𝑘 , ℎ − 𝑎, 𝑘
𝑥 − ℎ q
𝑎q −𝑦 − 𝑘 q
𝑏q = 1
EquationofHyperbolaCenter: ℎ, 𝑘 Slope:± �
�
Asymptotes:𝑦 = ± ��𝑥 − ℎ + 𝑘
Vertices: ℎ, 𝑘 + 𝑏 , ℎ, 𝑘 − 𝑏
𝑦 − 𝑘 q
𝑎q −𝑥 − ℎ q
𝑏q = 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com 111
AreasSquare:𝐴 = 𝐿q = 𝑊qRectangle:𝐴 = 𝐿 ∙ 𝑊Circle:𝐴 = 𝜋 ∙ 𝑟qEllipse:𝐴 = 𝜋 ∙ 𝑎𝑏Triangle:𝐴 = r
q𝑏 ∙ ℎTrapezoid:𝐴 = r
q𝑎 + 𝑏 ∙ ℎ
Parallelogram:𝑏 ∙ ℎRhombus:𝐴 = ÙÚ
q,𝑝and𝑞arethediagonals
SurfaceAreas
Cube:𝐴Û = 6𝐿q = 6𝑊qBox:𝐴Û = 2(𝐿𝑊 +𝑊𝐻 +𝐻𝐿)Sphere:𝐴Û = 4𝜋𝑟qCone:𝐴Û = 𝜋𝑟 𝑟 + ℎq + 𝑟q Cylinder:2𝜋𝑟ℎ + 2𝜋𝑟q
VolumesCube:𝑉 = 𝐿o = 𝑊oBox:𝑉 = 𝐿 ∙ 𝑊 ∙ 𝐻Sphere:𝑉 = Ü
o𝜋 ∙ 𝑟o
Cone:𝑉 = r
o𝜋 ∙ 𝑟qℎEllipsoid:𝑉 = Ü
o𝜋 ∙ 𝑎𝑏𝑐,𝑎, 𝑏, 𝑐aretheradii
DomainRestrictions
𝑦 =
𝑢𝑣 , 𝑣 ≠ 0𝑦 = 𝑢, 𝑢 ≥ 0𝑦 = ln 𝑢 , 𝑢 > 0
𝑦 = 𝑎3,none𝑦 = 𝑢� noneif𝑛isodd,𝑢 ≥ 0if𝑛iseven

Copyright©WESOLVETHEMLLC|WeSolveThem.com112
RightTriangle
𝑥q + 𝑦q = 𝑟q ⇔ 𝑟 = 𝑥q + 𝑦q
cos 𝛼 =
𝑥𝑟 cos 𝛽 =
𝑦𝑟
tan 𝛼 =
𝑦𝑥 tan 𝛽 =
𝑥𝑦
sin 𝛼 =
𝑦𝑟 sin 𝛽 =
𝑥𝑟
𝑥 = 𝑟 cos 𝛼 𝑦 = 𝑟 cos 𝛽𝑦 = 𝑟 sin 𝛼 𝑥 = 𝑟 sin 𝛽
𝛼 = arctan𝑦𝑥 = tanpr
𝑦𝑥 𝛽 = arctan
𝑥𝑦 = tanpr
𝑥𝑦
ReciprocalIdentities
sin 𝜃 =1
csc 𝜃 csc 𝜃 =1
sin 𝜃 tan 𝜃 =1
cot 𝜃
csc 𝜃 =1
sec 𝜃 sec 𝜃 =1
cos 𝜃 cot 𝜃 =1
tan 𝜃
tan 𝜃 =sin 𝜃cos 𝜃 cot 𝜃 =
cos 𝜃sin 𝜃

Copyright©WESOLVETHEMLLC|WeSolveThem.com 113
DoubleAngleFormulassin 2𝜃 = 2 sin 𝜃 cos 𝜃cos 2𝜃 = 1 − 2 sinq 𝜃cos 2𝜃 = cosq 𝜃 − sinq 𝜃 cos 2𝜃 = 2 cosq 𝜃 − 1cos 2𝜃 = 1 − 2 sinq 𝜃 tan 2𝜃 = q -ò¯<
rp-ò¯� <Officia
HalfAngleFormulas
sinq 𝜃 =12 1 − cos 2𝜃 cosq 𝜃 =
12 1 + 𝑐𝑜𝑠 2𝜃 tanq 𝜃 =
1 − cos(2𝜃)1 + cos(2𝜃)
SumandDifferenceFormulas
sin 𝛼 ± 𝛽 = sin 𝛼 cos 𝛽 ± cos 𝛼 sin 𝛽
cos(𝛼 ± 𝛽) = cos 𝛼 cos 𝛽 ∓ sin 𝛼 sin 𝛽
tan 𝛼 ± 𝛽 =tan𝛼 ± tan𝛽1 ∓ tan𝛼 𝑡𝑎𝑛𝛽
ProducttoSumFormulas
sin 𝛼 sin 𝛽 =12 [cos 𝛼 − 𝛽 − cos(𝛼 + 𝛽)]
cos 𝛼 cos 𝛽 =
12 [cos 𝛼 − 𝛽 + cos(𝛼 + 𝛽)]
sin 𝛼 cos 𝛽 =12 [sin 𝛼 + 𝛽 + sin 𝛼 − 𝛽 ]
cos 𝛼 sin 𝛽 =
12 sin 𝛼 + 𝛽 − sin 𝛼 − 𝛽
SumtoProductFormulas
sin 𝛼 + sin 𝛽 = 2 sin𝛼 + 𝛽2 cos
𝛼 − 𝛽2
sin 𝛼 − sin 𝛽 = 2 cos
𝛼 + 𝛽2 sin
𝛼 − 𝛽2
cos 𝛼 + cos 𝛽 = 2 cos𝛼 + 𝛽2 cos
𝛼 − 𝛽2
cos 𝛼 − cos 𝛽 = −2 sin
𝛼 + 𝛽2 sin
𝛼 − 𝛽2

Copyright©WESOLVETHEMLLC|WeSolveThem.com114
UnitCircle

Copyright©WESOLVETHEMLLC|WeSolveThem.com 115
Pre-CALCIIIReferenceDerivativeRules(primenotations)
DerivativeofaConstant
𝑐 Þ = 0
PowerRule 𝑥0 ′ = 𝑛𝑥0pr
ConstantMultipleRule
𝑐𝑢 Þ = 𝑐𝑢′
ProductRule 𝑢𝑣 Þ = 𝑢𝑣Þ + 𝑣𝑢′
QuotientRule
𝑢𝑣
Þ=𝑣𝑢Þ − 𝑢𝑣′
𝑣q
ChainRule
[𝑢 𝑣 ]′ = 𝑢Þ 𝑣 ∙ 𝑣′
ExponentialandLogarithmic
Operator Primeexp{u} 𝑑
𝑑𝑥 𝑒² � = 𝑒² � ∙ 𝑓Þ 𝑥
𝑒3 Þ = 𝑒3 ⋅ 𝑢′
NaturalLog 𝑑𝑑𝑥 ln 𝑓 𝑥 =
𝑓Þ 𝑥𝑓 𝑥
ln 𝑢 Þ =𝑢Þ
𝑢
BaseLogNote:log� 𝑎 ≡
®¯ �®¯ �
𝑑𝑑𝑥 log� 𝑓 𝑥 =
1ln 𝑏 ⋅
𝑓Þ 𝑥𝑓 𝑥
log� 𝑢 Þ =1ln 𝑏 ⋅
𝑢Þ
𝑢
Exponential 𝑑𝑑𝑥 𝑎
² � = 𝑎² � 𝑓Þ 𝑥 ln 𝑎
𝑎3 Þ = 𝑎3𝑢Þ ln 𝑎
InverseFunctionDerivative
𝑑𝑑𝑥 𝑓
pr 𝑥�=
1𝑓Þ 𝑓pr 𝑎
, 𝑓pr 𝑎 = 𝑏 ⇔ 𝑓 𝑏 = 𝑎

Copyright©WESOLVETHEMLLC|WeSolveThem.com116
TrigDerivativesStandard
sin 𝑢 Þ = cos 𝑢 ∙ 𝑢Þ cos 𝑢 Þ = − sin 𝑢 ∙ 𝑢Þ tan 𝑢 Þ = secq 𝑢 ∙ 𝑢Þ
csc 𝑢 Þ = − csc 𝑢 cot 𝑢 ∙ 𝑢Þ sec 𝑢 Þ = sec 𝑢 tan 𝑢 ∙ 𝑢Þ cot 𝑢 Þ = − cscq 𝑢 ∙ 𝑢′
Inverse
sinpr 𝑢 Þ =𝑢′1 − 𝑢q
cospr 𝑢 Þ = −𝑢′1 − 𝑢q
tanpr 𝑢 Þ =𝑢′
1 + 𝑢q
cscpr 𝑢 Þ = −𝑢′
𝑢 𝑢q − 1 secpr 𝑢 Þ =
𝑢′𝑢 𝑢q − 1
cotpr 𝑢 Þ = −𝑢′
1 + 𝑢q
CommonDerivativesOperator𝑑𝑑𝑥 𝑦 =
𝑑𝑦𝑑𝑥
𝑑𝑑𝑥 𝑥
0 = 𝑛𝑥0pr𝑑𝑑𝑥 𝑦
0 = 𝑛𝑦0pr𝑑𝑦𝑑𝑥
𝑑𝑑𝑥 𝑒
� = 𝑒�𝑑𝑑𝑥 𝑒
² � = 𝑒² � 𝑓Þ 𝑥 𝑑𝑑𝑥 ln 𝑥 =
1𝑥
𝑑𝑑𝑥 ln 𝑓 𝑥 =
𝑓Þ 𝑥𝑓 𝑥
𝑑𝑑𝑥 𝑎
� = 𝑎� ln 𝑎𝑑𝑑𝑥 𝑎
² � = 𝑎² � 𝑓Þ 𝑥 ln 𝑎
𝑑𝑑𝑥 sin 𝑥 = cos 𝑥
𝑑𝑑𝑥 csc 𝑥 = −csc 𝑥 cot 𝑥
𝑑𝑑𝑥 cos 𝑥 = −sin 𝑥
𝑑𝑑𝑥 (sec 𝑥) = sec 𝑥 tan 𝑥
𝑑𝑑𝑥 tan 𝑥 = secq 𝑥
𝑑𝑑𝑥 cot 𝑥 = −cscq 𝑥
𝑑𝑑𝑥 sin
pr 𝑥 =1
1 − 𝑥q
𝑑𝑑𝑥 csc
pr 𝑥 =−1
𝑥 𝑥q − 1
𝑑𝑑𝑥 cos
pr 𝑥 =−11 − 𝑥q
𝑑𝑑𝑥 sec
pr 𝑥 =1
𝑥 𝑥q − 1
𝑑𝑑𝑥 tan
pr 𝑥 =1
1 + 𝑥q𝑑𝑑𝑥 cot
pr 𝑥 =−1
1 + 𝑥q
𝑑𝑑𝑥 sinh 𝑥 = cosh 𝑥
𝑑𝑑𝑥 csch 𝑥 = −csch 𝑥 coth 𝑥
𝑑𝑑𝑥 cosh 𝑥 = sinh 𝑥
𝑑𝑑𝑥 sech 𝑥 = −sech 𝑥 tanh 𝑥
𝑑𝑑𝑥 tanh 𝑥 = sechq 𝑥
𝑑𝑑𝑥 coth 𝑥 = −cschq 𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 117
Prime𝑒3 Þ = 𝑢Þ𝑒3
ln 𝑢 Þ =𝑢Þ
𝑢 𝑎3 Þ = 𝑢Þ𝑎3 ln 𝑎
sin 𝑢 Þ = 𝑢Þ cos 𝑢 cos 𝑢 Þ = −𝑢Þ sin 𝑢 tan 𝑢 Þ = 𝑢Þ secq 𝑢
csc 𝑢 Þ = −𝑢Þ csc 𝑢 cot 𝑢 sec 𝑢 Þ = 𝑢Þ sec 𝑢 tan 𝑢 cot 𝑢 Þ = −𝑢Þ cscq 𝑢
arcsin 𝑢 Þ =𝑢Þ
1 − 𝑢q arccos 𝑢 Þ =
−𝑢Þ
1 − 𝑢q arctan 𝑢 Þ =
𝑢Þ
1 + 𝑢q
arccsc 𝑢 Þ =−𝑢Þ
𝑢 𝑢q − 1 arcsec 𝑢 Þ =
𝑢Þ
𝑢 𝑢q − 1 arccot 𝑢 Þ =
−𝑢Þ
1 + 𝑢q
ImplicitDifferentiation𝑑𝑑 𝒙 𝒚
Alwayspayattentiontothevariables
𝑑𝑦𝑑𝑥 = 𝑦Þ
𝑑𝑑𝑥 𝑦
q 2 𝑦 qpr 𝑑𝑑𝑥 𝑦 = 2𝑦𝑦′
Chain/PowerRule 𝑑𝑑𝑥 𝑦
0 = 𝑛𝑦0pr𝑑𝑦𝑑𝑥 ≡ 𝑛𝑦0pr𝑦′
Chain/Product 𝑑𝑑𝑥 𝑥𝑦 = 𝑥
𝑑𝑦𝑑𝑥 + 𝑦
𝑑𝑥𝑑𝑥 ≡ 𝑥𝑦Þ + 𝑦
Chain/Quotient𝑑𝑑𝑥
𝑥𝑦 =
𝑦 𝑑𝑥𝑑𝑥 − 𝑥𝑑𝑦𝑑𝑥
𝑦q ≡𝑦 − 𝑥𝑦′𝑦q
Logarithmic 𝑑𝑑𝑥 ln 𝑦 =
𝑦Þ
𝑦
Exponential 𝑑𝑑𝑥 𝑎
¦ = 𝑦Þ𝑎¦ ln 𝑎
Euler’sNumber 𝑑𝑑𝑥 𝑒
¦ = 𝑦Þ𝑒¦
Trigonometric 𝑑𝑑𝑥 sin 𝑦 = cos 𝑦 ⋅
𝑑𝑦𝑑𝑥 = cos 𝑦 ⋅ 𝑦′
TangentLine
𝑓 𝑥, 𝑦 = 0, 𝑃 𝑎, 𝑏 ⇒ 𝑦0 = 𝑓Þ 𝑎, 𝑏 𝑥 − 𝑎 + 𝑏

Copyright©WESOLVETHEMLLC|WeSolveThem.com118
RelatedRatesTheideaforrelatedrates,ingeneral,istofindtheequationthatrelatesgeometricallytothequestion,implicitlydifferentiateit,andthenpluginthegivenvariablesandsolvefortheunknown.Hereareafewexamplesi.e.justusetheequation/formulathatmimicstheobjectinquestion.Righttriangle 𝑎q + 𝑏q = 𝑐q ⇒ 𝑎𝑎Þ 𝑡 + 𝑏𝑏Þ 𝑡 = 𝑐𝑐Þ 𝑡
Circle 𝐴 = 𝜋𝑟q ⇒ 𝑑𝐴𝑑𝑡 = 2𝜋𝑟𝑟Þ𝑟 𝑡
Sphere 𝑉 =43𝜋𝑟
o ⇒ 𝑉Þ 𝑡 = 4𝜋𝑟q𝑑𝑟𝑑𝑡
HyperbolicFunctions
Notation
sinh 𝑥 =𝑒� − 𝑒p�
2 csch 𝑥 =2
𝑒� + 𝑒p� tanh 𝑥 =𝑒� − 𝑒p�
𝑒� + 𝑒p�
sech 𝑥 =2
𝑒� + 𝑒p� cosh 𝑥 =𝑒� + 𝑒p�
2 coth 𝑥 =𝑒� + 𝑒p�
𝑒� − 𝑒p�
Identities
sinh −𝑥 = −sinh 𝑥 cosh −𝑥 = cosh 𝑥
coshq 𝑥 − sinhq 𝑥 = 11 − tanhq 𝑥 = sechq 𝑥
sinh 𝑥 + 𝑦 = sinh 𝑥 cosh 𝑦 + cosh 𝑥 sinh 𝑦
cosh 𝑥 + 𝑦 = cosh 𝑥 cosh 𝑦 + sinh 𝑥 sinh 𝑦
sinhpr 𝑥 = ln 𝑥 + 𝑥q + 1 , −∞ ≤ 𝑥 ≤∞
coshpr 𝑥 = ln 𝑥 + 𝑥q − 1 , 𝑥 ≥ 1
tanhpr 𝑥 =12 ln
1 + 𝑥1 − 𝑥 , −1 < 𝑥 < 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com 119
DerivativesStandardsinh 𝑢 Þ = 𝑢′ cosh 𝑢 cosh 𝑢 Þ = 𝑢Þ sinh 𝑢 tanh 𝑢 Þ = 𝑢Þ sechq 𝑢
csch 𝑢 Þ = −𝑢Þ csch 𝑢 coth 𝑢 sech 𝑢 Þ = −𝑢Þ sech 𝑢 tanh 𝑢 coth 𝑢 Þ = −𝑢Þ cschq 𝑢
Inverse
sinhpr 𝑢 Þ =𝑢Þ
1 + 𝑢q coshpr 𝑢 Þ =
𝑢Þ
𝑢q − 1 tanhpr 𝑢 Þ =
𝑢Þ
1 − 𝑢q
cschpr 𝑢 Þ = −𝑢Þ
𝑢 1 + 𝑢q sechpr 𝑢 Þ = −
𝑢Þ
𝑢 1 − 𝑢q cothpr 𝑢 Þ =
𝑢Þ
1 − 𝑢q
Antiderivatives&IntegrationBasicRulesPowerRuleforantiderivatives 𝑦Þ = 𝑥0 ⇒ 𝑦 =
1𝑛 + 1𝑥
0 + 𝐶 ⇔ 𝑛 ≠ −1
Exponential𝑦Þ = 𝑎� ⇒ 𝑦 =
𝑎�
ln 𝑎 + 𝐶
NaturalLog(case1) 𝑦Þ =1𝑥 ⇒ 𝑦 = ln 𝑥 + 𝐶
NaturalLog(case2) 𝑦Þ =1
𝑎𝑥 + 𝑏 ⇒ 𝑦 =1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶
NaturalLog(case3)𝑦Þ =
𝑢Þ 𝑥𝑢 𝑥 ⇒ 𝑦 = ln 𝑢 𝑥 + 𝐶
Euler’sNumber(case1) 𝑦Þ = 𝑒�� ⇒ 𝑦 =1𝑎 𝑒
�� + 𝐶
Euler’sNumber(case2) 𝑦Þ = 𝑒���� ⇒ 𝑦 =1𝑎 𝑒
���� + 𝐶
Euler’sNumber(case3) 𝑦Þ = 𝑢Þ 𝑥 𝑒3 � ⇒ 𝑦 = 𝑒3 � + 𝐶
Anti-Chain-RuleSubstitutionMethod 𝑦Þ = 𝑓Þ 𝑔 𝑥 𝑔Þ 𝑥 ⇒ 𝑦 = 𝑓 𝑔 𝑥 + 𝐶
RiemannSumforAreaApproximation

Copyright©WESOLVETHEMLLC|WeSolveThem.com120
𝐴 ≈ lim0→∞
𝑓 𝑥8∗0
81r
𝛥𝑥 , 𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥
𝑐0
81r
= 𝑐𝑛 𝑖0
81r
=𝑛 𝑛 + 1
2
𝑐𝑓 𝑥8
0
81r
= 𝑐 𝑓 𝑥8
0
81r
𝑖q0
81r
=𝑛 𝑛 + 1 2𝑛 + 1
6
𝑓 𝑥8 ± 𝑔 𝑥8
0
81r
= 𝑓 𝑥8
0
81r
± 𝑔 𝑥8
0
81r
𝑖o0
81r
=𝑛 𝑛 + 1
2
q
AreaApproximationRulesMidpointRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎𝑛 𝑓
𝑥r + 𝑥q2 + 𝑓
𝑥q + 𝑥o2 +⋯
TrapezoidRule
𝑓 𝑥�
�𝑑𝑥 ≈
𝑏 − 𝑎2𝑛 𝑓 𝑥r + 2𝑓 𝑥q + 2𝑓 𝑥o + ⋯+ 2𝑓 𝑥0pr + 𝑓 𝑥0

Copyright©WESOLVETHEMLLC|WeSolveThem.com 121
TheIntegralNotation∫
lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 ≡ 𝑓(𝑥)�
�𝑑𝑥
DefiniteIntegralProperties
𝑓 𝑥�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎 𝑐
�
�𝑑𝑥 = 𝑐 𝑏 − 𝑎
𝑓 𝑥�
�𝑑𝑥 = 0 𝑐𝑓 𝑥
�
�𝑑𝑥 = 𝑐 𝑓 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 0
⇔ 𝑓 −𝑥 = −𝑓 𝑥 odd
𝑓 𝑥 ± 𝑔 𝑥�
�𝑑𝑥 = 𝑓 𝑥
�
�𝑑𝑥 ± 𝑔 𝑥
�
�𝑑𝑥
𝑓 𝑥�
p�𝑑𝑥 = 2 𝑓 𝑥
�
2
⇔ 𝑓 −𝑥 = 𝑓 𝑥 even
𝑓 𝑥�
�𝑑𝑥 = 𝑓 𝑥
𝒌
�𝑑𝑥 + 𝑓 𝑥
�
𝒌𝑑𝑥
NOTE:
𝑓 𝑥 ⋅ 𝑔 𝑥 𝑑𝑥 ≠ 𝑔 𝑥 𝑑𝑥 ⋅ 𝑓 𝑥 𝑑𝑥
𝑓 𝑥�
�𝑑𝑥 = − 𝑓 𝑥
�
�𝑑𝑥
FundamentalTheorems
Let𝑓 𝑥 = 𝑢and𝑔 𝑥 = 𝑣forthefollowing:
𝑖)𝑦 = 𝑓 𝑡 𝑑𝑡4
3⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑢 ∙ 𝑢′
𝑦 = 𝑓 𝑡 𝑑𝑡4
�⇒ 𝑦Þ = 𝑓 𝑣 ∙ 𝑣Þ − 𝑓 𝑎 ∙ 𝑎Þ = 𝑓 𝑣 ∙ 𝑣Þ − 0 = 𝑓 𝑣 ∙ 𝑣Þ
𝑦 = 𝑓 𝑡 𝑑𝑡�
3⇒ 𝑦Þ = 𝑓 𝑏 ∙ 𝑏Þ − 𝑓 𝑢 ∙ 𝑢Þ = 0 − 𝑓 𝑢 ∙ 𝑢Þ = −𝑓 𝑢 ∙ 𝑢′

Copyright©WESOLVETHEMLLC|WeSolveThem.com122
LimitDefinitionofaDefiniteIntegral
𝑖𝑖) lim0→∞
𝑓(𝑥8∗)0
81r
𝛥𝑥 = 𝑓(𝑥)�
�𝑑𝑥 = 𝐹 𝑏 − 𝐹 𝑎
𝛥𝑥 =𝑏 − 𝑎𝑛 , 𝑥8 = 𝑎 + 𝑖 ∙ 𝛥𝑥
DifferentialEquation(1storder)
𝑦Þ = 𝑓Þ 𝑥 ⇒ 𝑑𝑦𝑑𝑥 = 𝑓Þ 𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥 ⇒ 𝑑𝑦 = 𝑓Þ 𝑥 𝑑𝑥
⇒ 𝑦 + 𝑐r = 𝑓 𝑥 + 𝑐q ⇒ 𝑦 = 𝑓 𝑥 + 𝑐q − 𝑐r = 𝑓 𝑥 + 𝑐o ≡ 𝑓 𝑥 + 𝐶
CommonIntegrals
𝑑𝑥 = 𝑥 + 𝐶 𝑘 𝑑𝑥 = 𝑘𝑥 + 𝐶 𝑥 𝑑𝑥 =12 𝑥
q + 𝐶
𝑥q 𝑑𝑥 =13 𝑥
o + 𝐶 𝑥0 𝑑𝑥 =1
𝑛 + 1𝑥0�r + 𝐶
⇔ 𝑛 ≠ −1
1𝑥 𝑑𝑥 = ln |𝑥| + 𝐶
𝑒� 𝑑𝑥 = 𝑒� + 𝐶 𝑒�� 𝑑𝑥 =1𝑎 𝑒
�� + 𝐶 𝑒���� 𝑑𝑥 =1𝑎 𝑒
���� + 𝐶
1𝑥 + 1𝑑𝑥 = ln 𝑥 + 1 + 𝐶
1𝑎𝑥 + 𝑏 𝑑𝑥 =
1𝑎 ln 𝑎𝑥 + 𝑏 + 𝐶 𝑓 𝑢 𝑢′𝑑𝑢 = 𝐹 𝑢 + 𝐶
𝑒3𝑢′𝑑𝑢 = 𝑒3 + 𝐶 𝑢Þ
𝑢 𝑑𝑢 = ln 𝑢 + 𝐶 𝑓 𝑥�
�= 𝐹 𝑏 − 𝐹 𝑎
𝑢Þ cos 𝑢 𝑑𝑢 = sin 𝑢 + 𝐶 𝑢Þ sin 𝑢 𝑑𝑢 = −cos 𝑢 + 𝐶 𝑢Þ secq 𝑢 𝑑𝑢 = tan 𝑢 + 𝐶
𝑢Þ csc 𝑢 sec 𝑢 𝑑𝑢 = −csc 𝑢 + 𝐶 𝑢Þ sec 𝑢 tan 𝑢 𝑑𝑢 = sec 𝑢 + 𝐶 𝑢Þ cscq 𝑢 𝑑𝑢 = −cot 𝑢 + 𝐶
𝑢Þ
1 − 𝑢q𝑑𝑢 = arcsin 𝑢 + 𝐶
−𝑢Þ
1 − 𝑢q𝑑𝑢 = arccos 𝑢 + 𝐶
𝑢Þ
1 + 𝑢q 𝑑𝑢 = arctan 𝑢 + 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com 123
DefiniteIntegralRulesSubstitution
𝑓 𝑔 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑢
È �
È �𝑑𝑢
IntegrationbyParts
𝑓 𝑥 𝑔Þ 𝑥�
�𝑑𝑥 = 𝑓 𝑥 𝑔 𝑥 �
� − 𝑔 𝑥 𝑓Þ 𝑥�
�𝑑𝑥
Let𝑢 = 𝑓 𝑥 𝑑𝑣 = 𝑔Þ 𝑥 𝑑𝑥𝑑𝑢 = 𝑓Þ 𝑥 𝑑𝑥 𝑣 = 𝑔 𝑥 Then
𝑢�
�𝑑𝑣 = 𝑢𝑣 �
� − 𝑣�
�𝑑𝑢
TrigSubstitution𝑎q − 𝑥q 𝑎q + 𝑥q 𝑥q − 𝑎q
1 − sinq 𝜃 = cosq 𝜃 1 + tanq 𝜃 = secq 𝜃 secq 𝜃 − 1 = tanq 𝜃
𝑥 = 𝑎 sin 𝜃 𝑥 = 𝑎 tan 𝜃 𝑥 = 𝑎 sec 𝜃
𝜃 ∈ −𝜋2 ,𝜋2 𝜃 ∈ −
𝜋2 ,𝜋2 𝜃 ∈ 0,
𝜋2 ∨ 𝜃 ∈ 𝜋,
3𝜋2
TrigIdentity
tan 𝑥 𝑑𝑥 =sin 𝑥cos 𝑥 𝑑𝑥 = −
1cos 𝑥 ⋅ − sin 𝑥 𝑑𝑥,
𝑑𝑑𝑥 ln 𝑢 𝑥 =
1𝑢𝑑𝑢𝑑𝑥
= − ln cos 𝑥 + 𝐶 = ln1
cos 𝑥 + 𝐶 = ln sec 𝑥 + 𝐶
PartialFractions𝑝 𝑥
𝑥 𝑥 + 1 =𝐴𝑥 +
𝐵𝑥 + 1
𝑝 𝑥𝑥q 𝑥 + 1 =
𝐴𝑥 +
𝐵𝑥q +
𝐶𝑥 + 1
𝑝 𝑥𝑥 𝑥q + 1 =
𝐴𝑥 +
𝐵𝑥 + 𝐶𝑥q + 1
𝑝 𝑥𝑥 𝑥q + 1 q =
𝐴𝑥 +
𝐵𝑥 + 𝐶𝑥q + 1 +
𝐷𝑥 + 𝐸𝑥q + 1 q

Copyright©WESOLVETHEMLLC|WeSolveThem.com124
PHYSICSINFOBasicsymbolsNote:Aboldletteri.e.𝒗isthesameassaying𝑣.Vector-hatsareusuallydonebyhand,andboldaregenerallyusedinprint(probablybecausethevectorhatwasnotonatypewriterinthepast).Bothwillbeusedthroughoutthistext.Time 𝑡Position
𝑟 𝑡 = 𝒓 𝑡 = 𝑟r 𝑡 , 𝑟q 𝑡 , 𝑟o 𝑡 𝑟 𝑡 = 𝑠
Velocity 𝑣 = 𝒗 =
𝑑𝑟𝑑𝑡 =
𝑑𝒓𝑑𝑡 = 𝑟′r 𝑡 , 𝑟′q 𝑡 , 𝑟′o 𝑡
𝑣 = 𝒗 =𝑑𝑠𝑑𝑡 = 𝑠Þ 𝑡 = 𝑠 = 𝑣 𝑡 = 𝑣
Acceleration 𝑎 = 𝒂 =
𝑑𝑣𝑑𝑡 =
𝑑𝒗𝑑𝑡 =
𝑑q𝑟𝑑𝑡q =
𝑑q𝒓𝑑𝑡q = 𝑟′′r 𝑡 , 𝑟′′q 𝑡 , 𝑟′′o 𝑡
𝑎 = 𝒂 = 𝒗′ =𝑑q𝑠𝑑𝑡q = 𝑠 =
𝑑𝑣𝑑𝑡 = 𝑣 = 𝑣Þ 𝑡 = 𝑎 𝑡 = 𝑎
DerivingformulasStartingwithconstantacceleration
𝑑𝑣𝑑𝑡 = 𝑎 ⇒ 𝑑𝑣 = 𝑎𝑑𝑡 ⇒ 𝑑𝑣 = 𝑎 𝑑𝑡 ⇒ 𝑣 = 𝑎𝑡 + 𝑣2
Nowvelocity
𝑑𝑠𝑑𝑡 = 𝑣 = 𝑎𝑡 + 𝑣2 ⇒ 𝑑𝑠 = 𝑎𝑡 + 𝑣2 𝑑𝑡 ⇒ 𝑠 =
12𝑎𝑡
q + 𝑣2𝑡 + 𝑠2
𝑠 =12𝑎𝑡
q + 𝑣2𝑡 + 𝑠2 =𝛥𝑥 = 𝑣2,�𝑡 +
12𝑎�𝑡
q
𝛥𝑦 = 𝑣2,¦𝑡 +12𝑎¦𝑡
q
Mostformulasarealreadyderivedinaphysicsbooksoeventhoughcalculusmaybeaprerequisite,itmaynotreallybeusedinproblemsolving.

Copyright©WESOLVETHEMLLC|WeSolveThem.com 125
UnitsSystemInternationalUnits(S.I.Units)Meters(m) Seconds(s) Kilograms(kg)Note:Unitsarenotitalicized,asvariablesaree.g.𝑚 = 16kgand𝛥𝑥 = 10m:𝑚isthevariableformass,wheremistheunitofmeasurementformeters.UnitconversionUnitconversionisprettystraightforward;let’slookatanexample.ExampleConvert100meterspersecondtoinchesperhoursFindtheappropriaterelationsandsolvefor1sothatwhentheproductcancelsouttheunits:
1m = 100cm ⇒ 1 =100cm1m 1in = 2.54cm ⇒ 1 =
1in2.54cm 3600s = 1hr ⇒ 1 =
3600s1hr
100ms100cm1m
1in2.54cm
3600s1hr =
100 ⋅ 100 ⋅ 36002.54
inhr =
100 ⋅ 100 ⋅ 36002.54
inhr = 1.42×10ë
inhr
Tosumupunitconversion,justmakesureyouhavetheappropriaterelations,andthensetthemequalto1(1multipliedbyanythingisstillthesamething)intheorderofcancelingunits.
VectorsNotation
𝑎 = 𝑎r, 𝑎q in2Dor𝑎 = 𝑎r, 𝑎q, 𝑎o in3D
Addition/Subtraction
𝑎 ± 𝑏 = 𝑎r, 𝑎q ± 𝑏r, 𝑏q = 𝑎r ± 𝑏r, 𝑎q ± 𝑏q
𝑎 ± 𝑏 = 𝑎r, 𝑎q, 𝑎o ± 𝑏r, 𝑏q, 𝑏o = 𝑎r ± 𝑏r, 𝑎q ± 𝑏q, 𝑎o ± 𝑏o Visually

Copyright©WESOLVETHEMLLC|WeSolveThem.com126
DotProduct
𝑎 ⋅ 𝑏 = 𝑎r, 𝑎q ⋅ 𝑏r, 𝑏q = 𝑎r𝑏r + 𝑎q𝑏q
𝑎 ⋅ 𝑏 = 𝑎r, 𝑎q, 𝑎o ⋅ 𝑏r, 𝑏q, 𝑏o = 𝑎r𝑏r + 𝑎q𝑏q + 𝑎o𝑏oCrossProduct
𝑎×𝑏 = −𝑏×𝑎
𝑎×𝑏 =𝚤 𝚥 𝑘𝑎r 𝑎q 𝑎o𝑏r 𝑏q 𝑏o
= 𝚤
𝑎q 𝑎o𝑏q 𝑏o − 𝚥
𝑎r 𝑎o𝑏r 𝑏o + 𝑘
𝑎r 𝑎q𝑏r 𝑏q
= 𝚤 𝑎q 𝑏o − 𝑎o 𝑏q − 𝚥 𝑎r 𝑏o − 𝑎o 𝑏r + 𝑘 𝑎r 𝑏q − 𝑎q 𝑏r
𝚤, 𝚥,and𝑘arecalledunitvectors.Aunitvector,isavectoroflength1
𝚤 = 1, 0, 0 , 𝚥 = 0, 1, 0 , 𝑘 = 0, 0, 1
= 𝑎q 𝑏o − 𝑎o 𝑏q , 0, 0 − 0, 𝑎r 𝑏o − 𝑎o 𝑏r , 0 + 0, 0, 𝑎r 𝑏q − 𝑎q 𝑏r
= 𝑎q 𝑏o − 𝑎o 𝑏q , 𝑎r 𝑏o − 𝑎o 𝑏r , 𝑎r 𝑏q − 𝑎q 𝑏r
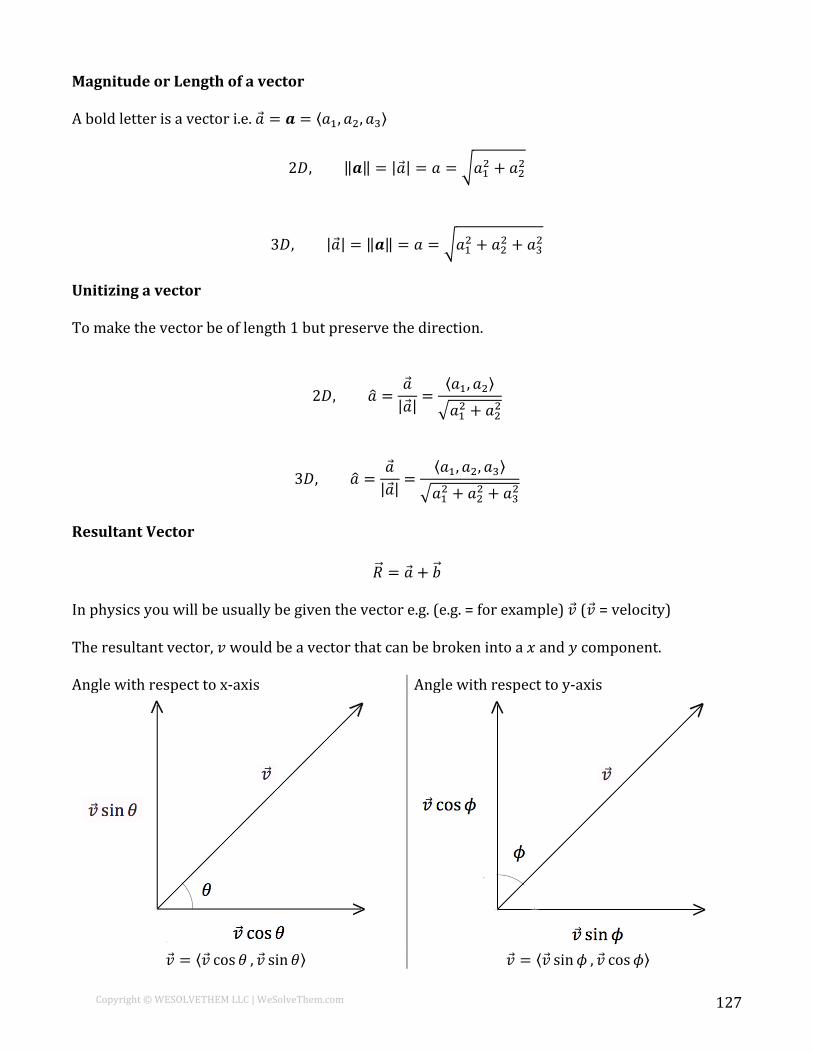
Copyright©WESOLVETHEMLLC|WeSolveThem.com 127
MagnitudeorLengthofavectorAboldletterisavectori.e.𝑎 = 𝒂 = 𝑎r, 𝑎q, 𝑎o
2𝐷, 𝒂 = 𝑎 = 𝑎 = 𝑎rq + 𝑎qq
3𝐷, 𝑎 = 𝒂 = 𝑎 = 𝑎rq + 𝑎qq + 𝑎oq
UnitizingavectorTomakethevectorbeoflength1butpreservethedirection.
2𝐷, 𝑎 =𝑎𝑎 =
𝑎r, 𝑎q𝑎rq + 𝑎qq
3𝐷, 𝑎 =𝑎𝑎 =
𝑎r, 𝑎q, 𝑎o𝑎rq + 𝑎qq + 𝑎oq
ResultantVector
𝑅 = 𝑎 + 𝑏Inphysicsyouwillbeusuallybegiventhevectore.g.(e.g.=forexample)𝑣(𝑣=velocity)Theresultantvector,𝑣wouldbeavectorthatcanbebrokenintoa𝑥and𝑦component.Anglewithrespecttox-axis Anglewithrespecttoy-axis
𝑣 = 𝑣 cos 𝜃 , 𝑣 sin 𝜃 𝑣 = 𝑣 sin𝜙 , 𝑣 cos𝜙

Copyright©WESOLVETHEMLLC|WeSolveThem.com128
𝑣,𝑣� = 𝑣 cos 𝜃 , 𝑣� = 𝑣 cos 𝜃 , 0𝑣¦ = 𝑣 sin 𝜃 , 𝑣¦ = 0, 𝑣 sin 𝜃
𝑣,𝑣� = 𝑣 sin𝜙 , 𝑣� = 𝑣 sin𝜙 , 0𝑣¦ = 𝑣 cos𝜙 , 𝑣¦ = 0, 𝑣 cos𝜙
𝑅 = 𝑣 = 𝑣� + 𝑣¦ = 𝑣 cos 𝜃 , 0 + 0, 𝑣 sin 𝜃 = 𝑣 cos 𝜃 , 𝑣 sin 𝜃 𝑣 = 𝑣 cos 𝜃 q + 𝑣 sin 𝜃 q = 𝑣q cosq 𝜃 + 𝑣q sinq 𝜃 = 𝑣q cosq 𝜃 + sinq 𝜃 = 𝑣q 1 = 𝑣
Thismaybeslightlyconfusingwiththenotationbecauseofthevectorsbutinphysics,youwillbegivenanumberforthevectori.e.𝑣 = −25ÿ
/,𝜃 = 25°(avectorhasmagnitudeanddirection,
whichmeansitcanbe𝑣 = −25ÿ/cos 25° , −25ÿ
/sin 25° orformagnitude 𝑣 = 𝑣 = 25ÿ
/.
SummingitupSincewearealwaysworkingwithnumbersingeneral,notvectornotationi.e. 𝑎r, … ,andweareinaphysicscourse,wecansimplyrefertodistance,velocity,andaccelerationwithoutanyvectorhatsi.e.𝑣 …sovelocityis𝑣,accelerationis𝑎,anddistanceiseither𝑥or𝑦(incalculusdistanceis𝑠).Forthetimebeing.
𝑣,𝑣� = 𝑣 cos 𝜃𝑣¦ = 𝑣 sin 𝜃 , 𝑎,
𝑎� = 𝑎 cos 𝜃𝑎¦ = 𝑎 sin 𝜃 , 𝛥𝑥 = 𝑥 − 𝑥2, 𝛥𝑦 = 𝑦 − 𝑦2
Forsomevector𝐴,𝐴� = 𝐴 cos 𝜃𝐴¦ = 𝐴 sin 𝜃
Resultantvector:𝑅 = ∑𝐴� q + ∑𝐴¦q,𝐴isanyvector
Theexampleonthenextpageisaproblemusuallyfoundaroundchapters3-5.TheproblemdemonstrateshowtorelateafreebodydiagramtoaCartesiancoordinatesystem.Thisisextremelyimportanttounderstand.Moststudentsstrugglewiththis,somakesuretotakethetimetounderstanditfully.

Copyright©WESOLVETHEMLLC|WeSolveThem.com 129
FreeBodyDiagramA250-Nforceisdirectedhorizontallytopusha29-kgboxupaninclinedplaneataconstantspeed.Determinethemagnitudeofthenormalforce,FN,andthecoefficientofkineticfriction.Theangleoftheinclineis27degrees.Step1)Identifytheunknowns,andthegivens.Given Angle 𝜃 = 27°Force 𝐹 = 250N Gravity 𝑔 = 9.81
msq
Mass 𝑚 = 29kg Weight 𝑤 = 29 ∗ 9.81N
Step2)FreeBodyDiagram.
FreeBody GraphRelation
Step3)Locateallrelatedequations. 𝐹 = 0 ∧ 𝜇Ö =
²x0
𝒙-direction 𝒚-direction𝐹� = 𝐹 cos 𝜃r = 250 cos 333°N 𝐹¦ = 𝐹 sin 𝜃r = 250 sin 333°N
𝑤� = 𝑚𝑔 cos 𝜃q = 29 9.81 cos 243°N 𝑤¦ = 𝑚𝑔 sin 𝜃q = 29 9.81 sin 243°N
𝐹� = 𝑓Ö + 𝐹 cos 𝜃r + 𝑚𝑔 cos 𝜃q = 0
⇒ 𝑓Ö = − 250 cos 333° + 29 9.81 cos 243° N
⇒ 𝐹Ö ≈ −93.59587378N ⇒ 𝐹Ö = 𝑓Ö = 94N
𝐹¦ = 𝑛 + 𝐹 sin 𝜃r + 𝑚𝑔 sin 𝜃q = 0
⇒ 𝑛 = − 250 sin 333° + 29 9.81 sin 243° N
⇒ 𝑛 ≈ 366.980071 ⇒ 𝑛 = 367N
Step4)Pluginallvalues
∴ 𝑛 = 367N, 𝜇Ö =𝐹Ö𝑛 =
𝑓Ö𝑛 =
𝐹 cos 𝜃r + 𝑚𝑔 cos 𝜃q𝐹 sin 𝜃r + 𝑚𝑔 sin 𝜃q
=−93.59587378366.980071 ≈ 0.26
Copyright©WESOLVETHEMLLC|WeSolveThem.com130
Averagevelocity(straight-line)
𝑣òy ≡ 𝑣 𝑣bar =𝛥𝑠𝛥𝑡 =
𝑠 − 𝑠2𝑡 − 𝑡2
=𝑠q − 𝑠r𝑡q − 𝑡r
Note:"𝑠"(italicized)isthestandardvariablefordistance/displacementincalculus,where"s"(notitalicized)istheunitfortime𝑡.Ofteninphysics,“𝑑”willbeusedfordistance/displacementbutincalculus,the𝑑isreservedforderivatives,whichiswhywewillstickwith𝑥and𝑦torepresentdistances.𝒙-direction y-direction
𝑣� ≡ 𝑣òyp� =𝑥 − 𝑥2𝑡 − 𝑡2
=𝛥𝑥𝛥𝑡 𝑣¦ ≡ 𝑣òyp¦ =
𝑦 − 𝑦2𝑡 − 𝑡2
=𝛥𝑦𝛥𝑡
Note:𝑥2maybereferredtoasx-initial,x-naughtorx-subzero.Instantaneousvelocity(Calculus)LimitDefinition 𝑣 = lim
â©→2
𝛥𝑠𝛥𝑡 , straight − line
𝑣 = limâ©→2
𝑠 𝑡 + 𝛥𝑡 − 𝑠 𝑡𝛥𝑡 , curve
𝒙-direction 𝑣� = limâ©→2
𝛥𝑥𝛥𝑡 , straight − line
= limâ©→2
𝑥 𝑡 + 𝛥𝑡 − 𝑥 𝑡𝛥𝑡
y-direction 𝑣¦ = limâ©→2
𝛥𝑦𝛥𝑡 , straight − line
= limâ©→2
𝑦 𝑡 + 𝛥𝑡 − 𝑦 𝑡𝛥𝑡 , curve
OperatorNotation 𝑣 =𝑑𝑑𝑡 𝑠 𝑡 =
𝑑𝑠𝑑𝑡 = 𝑠Þ 𝑡 ≡ 𝑠
𝒙-direction 𝑣� =𝑑𝑑𝑡 𝑥 𝑡 =
𝑑𝑥𝑑𝑡 = 𝑥Þ 𝑡 ≡ 𝑥
y-direction 𝑣¦ =𝑑𝑑𝑡 𝑦 𝑡 =
𝑑𝑦𝑑𝑡 = 𝑦Þ 𝑡 ≡ 𝑦
Copyright©WESOLVETHEMLLC|WeSolveThem.com 131
Note:Whenyouhaveafunction𝑦 = 𝑓 𝑥 ,itcanbeseparatedinto“parametricequations”𝑦 =𝑦 𝑡 and𝑥 = 𝑥 𝑡 ,whichgivestwonewgraphingsystems.ParametricEquationGraphingExample
𝑦 𝑥 = + 25 − 𝑥q
− 25 − 𝑥q
𝑥q + 𝑦q = 25
⇒𝑥5
q+
𝑦5
q= 1 = cosq 𝑡 + sinq 𝑡
⇒ 𝑥 𝑡 = 5 cos 𝑡 ∧ 𝑦 𝑡 = 5 sin 𝑡 , 𝑡 ∈ 0,2𝜋 AverageAcceleration(straight-line)
𝑎 ≡ 𝑎òy =𝑣 − 𝑣2𝑡 − 𝑡2
=𝛥𝑣𝛥𝑡
InstantaneousAcceleration(Calculus)Acceleration
𝑎 = limâ©→2
𝑣 𝛥𝑡 − 𝑡 − 𝑣 𝑡𝛥𝑡 =
𝑑𝑣𝑑𝑡 = 𝑣 =
𝑑𝑑𝑡
𝑑𝑠𝑑𝑡 = 𝑠
𝒙-direction 𝑎� =𝑑𝑣�𝑑𝑡 =
𝑑𝑑𝑡
𝑑𝑥𝑑𝑡
𝒚-direction𝑎¦ =
𝑑𝑣¦𝑑𝑡 =
𝑑𝑑𝑡
𝑑𝑦𝑑𝑡
Formulas(one-dimensional)Note:Thefollowingformulascanbeusedinthe𝑦-directionaswellbutbecarefulbecauseinthe𝑦-direction𝑎maybeequaltogravityandorthevelocitymaynotbeconstanti.e.dependingonhowthecoordinatesarechoseninreferencetotheobject(s)inquestion.

Copyright©WESOLVETHEMLLC|WeSolveThem.com132
Velocity:Accelerationisconstantin𝑥-direction
𝑣� = 𝑣�,2 + 𝑎�𝑡
AverageVelocity:𝑎isconstantin𝑥-direction 𝑣òyp� = 𝑣�,2 +
12𝑎�𝑡
Distance:𝑎isconstantin𝑥-direction 𝛥𝑥 = 𝑥 − 𝑥2 = 𝑣�,2𝑡 +
12𝑎�𝑡
q
Velocity:𝑎isconstantin𝑥-direction
𝑣�q = 𝑣�,2q + 2𝑎�𝛥𝑥
𝑣²q = 𝑣8q + 2𝑎𝑑
Distance:𝑎isconstantin𝑥-direction 𝛥𝑥 = 𝑥 − 𝑥2 =
𝑣� + 𝑣�,22 𝑡
𝑑² − 𝑑8 =𝑣² + 𝑣82 𝑡
Note:𝑣�,2isreadastheinitialvelocityinthe𝑥-directionIntegrationDerivations(Calculus)Note:Aderivativeisthe“rate-of-change,”wereaderivationistoderivesomething.
𝑑𝑣𝑑𝑡 = 𝑎 ⇒ 𝑑𝑣 = 𝑎 𝑑𝑡 ⇒ 𝑣 = 𝑎𝑡 + 𝑣2
𝑑𝑠𝑑𝑡 = 𝑣 = 𝑎𝑡 + 𝑣2 ⇒ 𝑑𝑠 = 𝑎𝑡 + 𝑣2 𝑑𝑡 ⇒ 𝑠 − 𝑠2 =
𝑎𝑡q
2 + 𝑣2𝑡
VectorNotations
𝐫 = 𝑥 𝑡 𝐢 + 𝑦 𝑡 𝐣+ 𝑧 𝑡 𝐤 ≡ 𝑟 = 𝑥 𝑡 𝚤 + 𝑦 𝑡 𝚥 + 𝑧 𝑡 𝑘
𝑥 𝑡 𝚤 + 𝑦 𝑡 𝚥 + 𝑧 𝑡 𝑘 = 𝑥 𝑡 1, 0, 0 + 𝑦 𝑡 0, 1, 0 + 𝑧 𝑡 0, 0, 1 = 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡 ∴ 𝑟 = 𝑥 𝑡 𝚤 + 𝑦 𝑡 𝚥 + 𝑧 𝑡 𝑘 = 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡
VectorDerivatives
𝑣 =𝑑𝑟𝑑𝑡 =
𝑑𝑥𝑑𝑡 𝚤 +
𝑑𝑦𝑑𝑡 𝚥 +
𝑑𝑧𝑑𝑡 𝑘 = 𝑥Þ 𝑡 , 𝑦Þ 𝑡 , 𝑧Þ 𝑡 = 𝑥, 𝑦, 𝑧
𝑎 =𝑑𝑣𝑑𝑡 =
𝑑q𝑟𝑑𝑡q =
𝑑q𝑥𝑑𝑡q 𝚤 +
𝑑q𝑦𝑑𝑡q 𝚥 +
𝑑q𝑧𝑑𝑡q 𝑘 = 𝑥ÞÞ 𝑡 , 𝑦ÞÞ 𝑡 , 𝑧ÞÞ 𝑡 = 𝑥, 𝑦, 𝑧

Copyright©WESOLVETHEMLLC|WeSolveThem.com 133
Note:Sometimesyouwillseeaderivativesuchas𝑥Þ 𝑡 = 𝑣� =»�»©,butinthree-dimensional
calculus,𝑣� ={4{!,whichisthepartialderivativeof𝑣withrespectto𝑥.Justpayattentiontowhat
eachbookdefinesnotationsas,astheymaynotalwaysbeconsistent.
∴ 𝑣 =𝑑𝑟𝑑𝑡 =
𝑑𝑥𝑑𝑡 𝚤 +
𝑑𝑦𝑑𝑡 𝚥 +
𝑑𝑧𝑑𝑡 𝑘 = 𝑥Þ 𝑡 , 𝑦Þ 𝑡 , 𝑧Þ 𝑡 ≡ 𝑣�, 𝑣¦, 𝑣b
𝑎 =𝑑q𝑟𝑑𝑡q =
𝑑q𝑥𝑑𝑡q 𝚤 +
𝑑q𝑦𝑑𝑡q 𝚥 +
𝑑q𝑧𝑑𝑡q 𝑘 = 𝑎�, 𝑎¦, 𝑎b
Magnitudeofvector
v = 𝑣 = 𝑣 = 𝑥Þ 𝑡 q + 𝑦Þ 𝑡 q + 𝑧Þ 𝑡 q
ProjectileMotion𝑥 = 𝑣2 cos 𝜃2 𝑡 𝑦 = 𝑣2 sin 𝜃2 𝑡 −
12𝑔𝑡
q
𝑣� = 𝑣2 cos 𝜃2 𝑣¦ = 𝑣2 sin 𝜃2 − 𝑔𝑡
𝑦 = tan 𝜃2 𝑥 −𝑔𝑥q
2𝑣2q cosq 𝜃2 𝑡 =
𝑣2 sin 𝜃2 ± 𝑣2q sinq 𝜃2 − 2𝑔𝑦𝑔
CircularMotion𝑇istheperiod,𝑅istheradiusUniformcircularmotion
𝑎ñòî =𝑣q
𝑅
Uniformcircularmotion 𝑣 =2𝜋𝑅𝑇
Uniformcircularmotion𝑎ñòî =
4𝜋q𝑅𝑇q
Uniformcircularmotion𝑅 =
𝑣q
𝑎ñòî
Uniformcircularmotion𝑎-ò¯ =
𝑑 𝑣𝑑𝑡
Non-uniformcircularmotion𝑎-ò¯ =
𝑑𝑣𝑑𝑡

Copyright©WESOLVETHEMLLC|WeSolveThem.com134
Uniformcircularmotion 𝑑𝑣𝑑𝑡 =
𝑎q
𝑟
Non-uniformcircularmotion 𝑑𝑣𝑑𝑡 = 𝑎ñòî q + 𝑎-ò¯ q
ForceResultantvector𝑹(thesumofallvectors)
𝑅� = 𝐹�,r + 𝐹�,q + 𝐹�,o + ⋯ = 𝐹� 𝑅¦ = 𝐹¦,r + 𝐹¦,q + 𝐹¦,o + ⋯ = 𝐹¦
𝑅 = 𝐹r + 𝐹q + 𝐹o + ⋯ = 𝐹 ⇒ 𝑅 = 𝐹 = 𝑅�q+ 𝑅¦
q= 𝐹�
q+ 𝐹¦
q
Newton’sFirstLawofMotionAbodyactedon,withzeronetforce,moveswithconstantvelocityandnoacceleration.Newtonunit𝐍
N = kg ⋅msq mass times acceleration
Newton’sSecondLawofMotionIfaforceisactedonabody,thenthebodyaccelerates,andthedirectionofaccelerationisthesameasthenetforcesdirection.
𝐹 = 𝑚𝑎
FormulasWeight 𝑤 = 𝑚𝑔,(mass)(gravity)
𝑤 = 𝑚𝑎ForceactingonanotherForce 𝐹r,q = −𝐹q,r
LINEARALGEBRA

Copyright©WESOLVETHEMLLC|WeSolveThem.com 135
Rankofmatrixandpivots
𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴r = 1
𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴ç = 1
𝟏1 , 𝑟𝑎𝑛𝑘 𝐴q = 1
𝟏0 , 𝑟𝑎𝑛𝑘 𝐴è = 1
𝟏 1 1 , 𝑟𝑎𝑛𝑘 𝐴o = 1
𝟏 1 1 , 𝑟𝑎𝑛𝑘 𝐴r2 = 1
𝟏11, 𝑟𝑎𝑛𝑘 𝐴Ü = 1
𝟏00, 𝑟𝑎𝑛𝑘 𝐴rr = 1
𝟏 00 𝟏 , 𝑟𝑎𝑛𝑘 𝐴é = 2
𝟏 1 11 1 11 1 1
, 𝑟𝑎𝑛𝑘 𝐴rq = 1
𝟏 0 00 𝟏 1 , 𝑟𝑎𝑛𝑘 𝐴ê = 2
𝟏 1 11 1 −𝟏1 1 1
, 𝑟𝑎𝑛𝑘 𝐴ro = 2
𝟏 00 00 𝟏
, 𝑟𝑎𝑛𝑘 𝐴ë = 2
𝟏 1 10 𝟏 10 0 𝟏
, 𝑟𝑎𝑛𝑘 𝐴rÜ = 3
Note:maxrankisthesmallerdimensionof𝑛×𝑚e.g.3×7meansthat3isthehighestpossiblerank.Itgoeswiththetransposeaswelli.e.7×3stillhasahighestrankof3.
𝐴 = 1 2−1 −2
1 11 1
1 11 1 𝑅1 + 𝑅2 ⇐ 𝑅2
~ 𝟏 20 0
1 1𝟐 2
1 12 2 ⇒ 𝑟𝑎𝑛𝑘 𝐴 = 2
𝐴𝑥 = 𝑏 ⇒3 2 31 3 33 2 1
131~𝟏 0 00 𝟏 00 0 𝟏
−37870
, 𝑟𝑎𝑛𝑘 𝐴 = 3𝑖. 𝑒.𝐴 = 𝑓𝑢𝑙𝑙𝑟𝑎𝑛𝑘
Lengthofavectorandtheunitvector

Copyright©WESOLVETHEMLLC|WeSolveThem.com136
Givenavector𝒙 = 𝑥 = 𝑥r, 𝑥q, 𝑥o, … , 𝑥0 =
𝑥r𝑥q𝑥o⋮𝑥0
Thelengthofthevectoristhemagnitudeofthevector
𝒙 ≡ 𝑥 = 𝑥rq + 𝑥qq + 𝑥oq + ⋯+ 𝑥0q
Ex:Findthelengthof 1,2,3,4
1,2,3,4 =
1234
⇒ 1,2,3,4 = 1q + 2q + 3q + 4q = 1 + 4 + 9+ 16 = 30units
Ex:Fromthevectorabove,finditsunitvector.
𝑣𝑣 =
𝒗𝒗 ⇒
𝑣𝑣 =
𝒗𝒗 = 1units
𝒙𝒙 =
11 + 4 + 9+ 16
1234
=1,2,3,430
=130,230,330,430
𝑥𝑥 =
130
q
+230
q
+330
q
+430
q
=130 +
430 +
930 +
1630 =
3030 = 1units
SolutionsofAugmentedMatricesConsiderthebasicscenarioi.e.rememberfromalgebrawhenyouhave𝑎𝑥 + 𝑏𝑦 = 𝑐and𝑑𝑥 +𝑒𝑦 = 𝑓?Rememberthatthesetwolineseitherlyeoneachother,intersectornevertouch,andthismeanstheyhaveeitherauniquesolution,infinitesolutions,onnosolution.Thesamegoeswith𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑,exceptthisisaplane.Forℝo,considerthefollowingsystemanditsthreepossiblesolutionsafterreduction:CoefficientMatrix

Copyright©WESOLVETHEMLLC|WeSolveThem.com 137
𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 = 𝑑𝑒𝑥 + 𝑓𝑦 + 𝑔𝑦 = ℎ𝑖𝑥 + 𝑗𝑦 + 𝑘𝑧 = 𝑙
⇒ 𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
𝑥𝑦𝑧=
𝑑ℎ𝑙⇒
𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
𝑑ℎ𝑙
TheCoefficientMatrix=𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
UniqueSolution
~1 0 00 1 00 0 1
∗∗∗⇒
𝑥𝑦𝑧=
∗∗∗
In2𝐷/3𝐷hereisasinglepointofintersection
InfiniteSolution
~1 0 00 1 00 0 0
∗∗0⇒
𝑥𝑦𝑧=
∗∗0+ 𝑠
001
In3𝐷twoplaneslieontopofeachotherIn2𝐷twolineslieontopofeachother
NoSolution
~1 0 00 1 00 0 0
∗∗∗⇒
𝑥𝑦0=
∗∗∗
Twoplanes/linesnevertouch
SolvingSystemofEquations
𝑥q + 𝑥Ü = 5 ∧ 𝑥o − 4𝑥Ü = 4

Copyright©WESOLVETHEMLLC|WeSolveThem.com138
Iliketosetupamatrixforthisproblem,andsolvethematrixi.e.
𝑥q + 𝑥Ü = 5 ⇒ 0𝑥r + 𝑥q + 0𝑥o + 𝑥Ü = 5
𝑥o − 4𝑥Ü = 4 ⇒ 0𝑥r + 0𝑥q + 𝑥o − 4𝑥Ü = 4
⇒ 0010011−4
54 ⇒
0 00 1
0 00 1
0 00 0
1 −40 0
0540
Thishelpstoseethepivots,andidentifythat𝑥r ∧ 𝑥Üarefreevariables.Whichmeansyoucansetthemequaltothemselves.
0 00 1
0 00 1
0 00 0
1 −40 0
0540
⇒ 𝒙 =
𝑥r𝑥q𝑥3𝑥4
=
𝑥r5 − 𝑥Ü4 + 4𝑥4𝑥4
=
0 + 𝑥r + 0𝑥Ü5 + 0𝑥r − 𝑥Ü4 + 0𝑥1 + 4𝑥40 + 0𝑥1 + 𝑥4
=
0540
+
1000
𝑥r +
0−141
𝑥Ü
Youcanchoose𝑥r ∧ 𝑥Ü = 𝑠 ∧ 𝑡sincetheyarefree
∴ 𝒙 =
0540
+ 𝑠
1000
+ 𝑡
0−141
= 𝑠, 5 − 𝑡, 4 + 4𝑡, 𝑡
GaussJordanAugmentedMatrix

Copyright©WESOLVETHEMLLC|WeSolveThem.com 139
2𝑥 − 𝑦 = 2𝑥 + 2𝑦 = 112𝑥 + 3𝑦 = 18
⇒2 −11 22 3
21118
𝑅2 ⇐12𝑅1 − 𝑅2 ∧ 𝑅3 ⇐ 𝑅1 − 𝑅3 ⇒
2 −10 −520 −4
2−10−16
𝑅2 ⇐ −25𝑅2 ∧ 𝑅3 ⇐ −
14𝑅3 ⇒
2 −10 10 1
244
𝑅3 ⇐ 𝑅2 − 𝑅3 ⇒2 −10 10 0
240
𝑅1 ⇐ 𝑅1 + 𝑅2 ⇒2 00 10 0
640
𝑅1 ⇐12𝑅1 ⇒
1 00 10 0
340⇒ 𝐼q𝒙 =
34 ⇒ 𝑥 = 3
𝑦 = 4
∴ 𝑥, 𝑦 = 3,4
RowOperationRulesandGuidelinesforSolveaSystemofMatrices
Solvethesystemofequationsrref[{-1/4,1,0,1},{1,0,1,2},{3,-1,1,2}]
−14𝑥 + 𝑦 = 1𝑥 + 𝑧 = 2
3𝑥 − 𝑦 + 𝑧 = 2
⇒−14 1 01 0 13 −1 1
122
Alwaysgointhefollowingorderunlessazeroalreadyexistsandorarowoperationmakesitexist.
1st
∗ ∗1 ∗
∗ ∗∗ ∗
2 43 5
∗ ∗6 ∗
∗∗∗∗
,2nd∗ 120 ∗
11 910 8
0 00 0
∗ 70 ∗
∗∗∗∗
,3rd1 00 1
0 00 0
0 00 0
1 00 1
∗∗∗∗
Generalallowedoperationswhensolveasystem(notthesameforamatrixA)

Copyright©WESOLVETHEMLLC|WeSolveThem.com140
1. Rowswapping𝑅1 ⇔ 𝑅2(meansswaprow1withrow2)
2. Divide/multiplyaRowr
é𝑅2 ∧ −3𝑅4(meansdividerow2by5andmultiplyrow4by-3)
3. Adding/subtractingscaledrows5𝑅1 + 𝑅2 ⇐ 𝑅2(meansthenewrow2=5 row1 +
row2 )
−14 1 01 0 13 −1 1
122
Takealookatthematrix.Firstmultiplyrow1by−4andthenswaprow2androw3
−4𝑅1 = −4 −14 1 0 1 = 1 −4 0 −4 ⇐ 𝑅1
𝑅2 ⇔ 𝑅3
1 −4 03 −1 11 0 1
−422
Noweliminate3and1fromcolumn1
−3𝑅1 + 𝑅2 = −3 1 −4 0 −4 + 3 −1 1 2 = 0 11 1 14 ⇐ 𝑅2
−𝑅1 + 𝑅3 = (−1) 1 −4 0 −4 + 1 0 1 2 = 0 4 1 6 ⇐ 𝑅3
1 −4 00 11 10 4 1
−4146
Noweliminate4fromcolumn2
−411𝑅2 + 𝑅3 = −
411 0 11 1 14 + 0 4 1 6 = 0 0
711
1011
⇐ 𝑅3
1 −4 00 11 10 0 7
11
−4141011
Multiplyrow2by r
rrandrow3byrr
ë

Copyright©WESOLVETHEMLLC|WeSolveThem.com 141
111𝑅2 = 0 1
111
1411
117 𝑅3 = 0 0 1
107
1 −4 00 1 1
110 0 1
−41411107
⇒
𝑥 − 4𝑦 = −4 ⇒ 𝑥 = 487 − 4 =
47
𝑦 +111 𝑧 =
1411 ⇒ 𝑦 =
1411 −
111
107 =
87
𝑧 =107
∴ ! =
4787107
=17
4810
=27
245
EchelonForms:EF,REF,RREF
𝑥q − 𝑥r − 𝑥o = 22𝑥r − 𝑥q = 2
2𝑥r + 𝑥q + 𝑥o = 2⇒
−1 1 −12 −1 02 1 1
222
EchelonFormakaef−1 1 −12 −1 02 1 1
2222𝑅1 + 𝑅2 ⇐ 𝑅22𝑅1 + 𝑅3 ⇐ 𝑅3
~−1 1 −10 1 −20 3 −1
266−3𝑅2 + 𝑅3 ⇐ 𝑅3
~ −𝟏 1 −1𝟎 𝟏 −2𝟎 𝟎 𝟓
26−12
ReducedEchelonFormakaref
−1 1 −10 1 −20 0 5
26−12
−𝑅1 ⇐ 𝑅115𝑅3 ⇐ 𝑅3
~𝟏 −1 1𝟎 𝟏 −2𝟎 𝟎 𝟏
26
−125
ReducedRowEchelonFormakarref

Copyright©WESOLVETHEMLLC|WeSolveThem.com142
1 −1 10 1 −20 0 1
−26
−1252𝑅3 + 𝑅2 ⇐ 𝑅2−𝑅3 + 𝑅1 ⇐ 𝑅1
~1 −1 00 1 00 0 1
2565
−125
𝑅2 + 𝑅1 ⇐ 𝑅1~
𝟏 𝟎 𝟎𝟎 𝟏 𝟎𝟎 𝟎 𝟏
8565
−125
[{-1,1,-1,2},{2,-1,0,2},{2,1,1,2}]
LinearDependence
LinearcombinationSayyouhaveℬ = 𝑢, 𝑣,𝑤 ,writeitasalinearcombination.Allthatmeansis𝑢𝑥r + 𝑣𝑥q + 𝑤𝑥oNowtoverifylinearindependence/dependencesetthecombinationequaltozero.Ifthereisauniquesolution,thevectorsarelinearlyindependentelsedependenti.e.if𝑢, 𝑣, 𝑜𝑟𝑤canbewrittenasalinearcombinationoftheotherse.g.𝑢 = 𝑣 − 𝑤or𝑣 = 𝑢 + 2𝑤thentheyaredependent.DifferentwaystoverifydependencyofvectorsEx1:Setu,v,wLinearlyDependentArethesetslineardependent/independent?(ℬdenotesbasis.𝒲isgenerallysubset/space)
𝒲r = 𝑢 − 2𝑣 + 𝑤,𝑤 + 𝑣 − 𝑢, 2𝑤 − 𝑣 (itcaneasilybeseenthat 𝑢 − 2𝑣 + 𝑤 + 𝑤 + 𝑣 − 𝑢 = 2𝑤 − 𝑣,whichmeansthesetisdependent)
𝒲r: 𝑢 − 2𝑣 + 𝑤 𝑥r + 𝑤 + 𝑣 − 𝑢 𝑥q + 2𝑤 − 𝑣 𝑥o
= 𝑢 − 2𝑣 + 𝑤 −𝑢 + 𝑣 + 𝑤 0𝑢 − 𝑣 + 2𝑤𝑥r𝑥q𝑥o
= 𝑢 𝑣 𝑤1−21
𝑢 𝑣 𝑤−111
𝑢 𝑣 𝑤0−12
𝑥r𝑥q𝑥o
= 𝑢 𝑣 𝑤1 −1 0−2 1 −11 1 2
𝑥r𝑥q𝑥o
rref1 −1 0−2 1 −11 1 2
=1 0 10 1 10 0 0
, notfullrank ∴ LD

Copyright©WESOLVETHEMLLC|WeSolveThem.com 143
Ex2:Setu,v,wLinearlyIndependent
𝒲q = 𝑢, 𝑣 + 2𝑢, 𝑢 − 2𝑣
𝑢𝑥r + 𝑣 + 2𝑢 𝑥q + 𝑢 − 2𝑣 + 𝑤 𝑥o = 0 ⇒
=
= 𝑢 𝑣 𝑤100
𝑢 𝑣 𝑤210
𝑢 𝑣 𝑤1−21
𝑥r𝑥q𝑥o
= 𝑢 𝑣 𝑤1 2 10 1 −20 0 1
𝑥r𝑥q𝑥o
rref1 2 10 1 −20 0 1
, fullrank ∴ LI
Ex3:VectorsLinearlyIndependentDetermineifthesetislinearlyindependentordependent
𝒲 =123
,321
,11−1
𝑢𝑥r + 𝑣𝑥q + 𝑤𝑥o =123
𝑥r +321
𝑥q +11−1
𝑥o = 0 𝐴𝒙 = 0
rref1 3 12 2 13 1 −1
000
=1 0 00 1 00 0 1
000
Thisisafullrankmatrixthereforeitisalinearlyindependentsetofvetors.Ex4:VectorsLinearlyDependent Determineifthesetislinearlyindependentordependent
𝒲 =123
,321
,−3−6−9

Copyright©WESOLVETHEMLLC|WeSolveThem.com144
1 3 −32 2 −63 1 −9
000
𝐴𝒙 = 0 ⇒ 𝐴0𝐴pr𝐴𝒙 = 𝐴0𝐴pr0 ⇒ " # 𝐼 𝒙 = 0 ⇒ 𝐴0𝒙 = 0
∴1 2 33 2 1−3 −6 −9
000𝑅1 = −3𝑅3 ∴ LDi. e.notfullrank
3𝑅1 + 𝑅2 ⇐ 𝑅3 ⇒ 1 2 33 2 1−3 −6 −9
000~1 2 33 2 10 0 0
000
Ex5:Polynomials Determineifthesetislinearlyindependentordependent
𝑝r = 𝑥q + 𝑥, 𝑝q = 𝑥 − 𝑥q, 𝑝o = 1Don’tbescaredofthepolynomial,justfollowtherules,anditwillworkitselfout!(note:𝑝 𝑥 = 𝑎𝑥q + 𝑏𝑥 + 𝑐orhigherorderpolynomials)
𝑥q + 𝑥 𝑣r + 𝑥 − 𝑥q 𝑣q + 1 𝑣o = 0
𝑥q + 𝑥 𝑥 − 𝑥q 1𝑣r𝑣q𝑣o
=000⇒
𝑥q + 𝑥 + 0 −𝑥q + 𝑥 + 0 0𝑥q + 0𝑥 + 1𝑣r𝑣q𝑣o
=000⇒ 𝑥q 𝑥 1
1 −1 01 1 00 0 1
𝑣r𝑣q𝑣o
=000
−𝑅1 + 𝑅2 ⇒1 −1 00 2 00 0 1
Fullrankandlinearlyindependent
Ex6:(M_(2x2))
𝒲 = 1 01 1 , 1 1
0 1 , 1 00 1 , 1 0
1 0
1 01 1 𝑥r +
1 10 1 𝑥q +
1 00 1 𝑥o +
1 01 0 𝑥Ü = 0
𝑥r 0𝑥r 𝑥r
+𝑥q 𝑥q0 𝑥q + 𝑥o 0
0 𝑥o+ 𝑥Ü 0
𝑥Ü 0 = 0

Copyright©WESOLVETHEMLLC|WeSolveThem.com 145
𝑥r + 𝑥q + 𝑥o + 𝑥Ü 𝑥q𝑥r + 𝑥Ü 𝑥r + 𝑥q + 𝑥o
= 0 00 0
𝑥r + 𝑥q + 𝑥o + 𝑥Ü = 0
𝑥q = 0𝑥r + 𝑥Ü = 0
𝑥r + 𝑥q + 𝑥o = 0
⇒1 10 1
1 10 0
1 01 1
0 11 0
0000
~1 00 1
0 00 0
0 00 0
1 00 1
0000
Thisisafullrankmatrix,thereforeitisalinearlyindependentsetof2X2matrices
ColumnSpace-RowSpace-NullSpace-Kernel
𝐴 =−323
9−6−9
−24−2
−782
Step1rref(𝐴)rref[{-3,9,-2,-7},{2,-6,4,8},{3,-9,-2,2}]
−323
9−6−9
−24−2
−782
~𝟏00
−300
0𝟏0
32540
IdentifyRowSpace
𝟏𝟎0
−𝟑𝟎0
𝟎𝟏0
𝟑/𝟐𝟓/𝟒0
⇒ ℬßo =
1−303/2
,
0015/4
IdentifyColumnSpace
−𝟑𝟐𝟑
9−6−9
−𝟐𝟒−𝟐
−782
~𝟏00
−300
0𝟏0
3/25/40
⇒ ℬáo =−323
,−24−2
Checkyouworki.e.Note:CS*RS=A
−3 −22 43 −2
1 −3 0 3/20 0 1 5/4 =
−323
9−6−9
−24−2
−782
NullSpace(Kernel)

Copyright©WESOLVETHEMLLC|WeSolveThem.com146
−323
9−6−9
−24−2
−782
~100
−𝟑00
010
𝟑/𝟐𝟓/𝟒0
⇒ ℬ�o =
3100
,
−60−54
Youcanextractthenullspacequicklybychangingthesignofthenon-pivotelementandaddingapivotwherethepivotwouldlineuptoanidentitymatrixbutthisishowtocomputeit:The‘NullSpace’isthesolutionto𝐴𝒙 = 𝟎
100
−300
010
3/25/40
𝑥r𝑥q𝑥o𝑥Ü
=
0000
⇒
𝑥r − 3𝑥q +32 𝑥Ü = 0
𝑥q = 𝑥q𝑓𝑟𝑒𝑒
𝑥o +54 𝑥Ü = 0
𝑥Ü = 𝑥Ü𝑓𝑟𝑒𝑒
⇒
𝑥r = 3𝑥q −32 𝑥Ü
𝑥q = 𝑥q + 0𝑥Ü
𝑥o = 0𝑥q −54 𝑥Ü
𝑥Ü = 0𝑥q + 𝑥Ü
⇒ 𝒙 =
3100
𝑥q +
−320
−541
𝑥Ü, 𝑥q = 1 ∧ 𝑥Ü = 4 ⇒ ℬ�o =
3100
,
−60−54
CheckyourworkA*NS=0:
−323
9−6−9
−24−2
−782
31
−6−5
00
04
=0 00 00 0
= 𝟎
LUDDecompositionandElementaryMatrices
𝐴 =1 2 13 2 11 2 4
, 𝐴 = 𝐿𝑈𝐷 =? note∗ 6𝑡ℎ 5𝑡ℎ1𝑠𝑡 ∗ 4𝑡ℎ2𝑛𝑑 3𝑟𝑑 ∗
∧∗ 12𝑡ℎ1𝑠𝑡 ∗
11𝑡ℎ 9𝑡ℎ10𝑡ℎ 8𝑡ℎ
2𝑛𝑑 4𝑡ℎ3𝑟𝑑 5𝑡ℎ
∗ 7𝑡ℎ6𝑡ℎ ∗
1 2 13 2 11 2 4
−3𝑅1 + 𝑅2 = −3 −6 −3 + 3 2 1 = 0 −4 −2 ⇐ 𝑅2 −1 𝑅1 + 𝑅3 = −1 −2 −1 + 1 2 4 = 0 0 3 ⇐ 𝑅3

Copyright©WESOLVETHEMLLC|WeSolveThem.com 147
⇒1 2 10 −4 −20 0 3
∨ $ 1𝐴 =1 0 0−3 1 0−1 0 1
1 2 13 2 11 2 4
=1 2 10 −4 −20 0 3
⇒1 2 10 −4 −20 0 3
23𝑅3 + 𝑅2 = 0 0 2 + 0 −4 −2 = 0 −4 0 ⇐ 𝑅2
−13𝑅3 + 𝑅1 = 0 0 −1 + 1 2 1 = 1 2 0 ⇐ 𝑅1
⇒1 2 00 −4 00 0 3
12𝑅2 + 𝑅1 = 0 −2 0 + 1 2 0 = 1 0 0 ⇐ 𝑅1
⇒1 0 00 −4 00 0 3
∨ $ 3𝐸q𝐸r𝐴 =1
12 0
0 1 00 0 1
1 0 −13
0 123
0 0 1
1 0 0−3 1 0−1 0 1
1 2 13 2 11 2 4
=1 0 00 −4 00 0 3
= 𝐷
𝐿 =1 0 0𝟑 1 0𝟏 0 1
, 𝑈 =1 −
𝟏𝟐
𝟏𝟑
0 1 −𝟐𝟑
0 0 1
, 𝐷 =1 0 00 −4 00 0 3
∴ 𝐴 = 𝐿𝑈𝐷 =1 0 0𝟑 1 0𝟏 0 1
1 −𝟏𝟐
𝟏𝟑
0 1 −𝟐𝟑
0 0 1
1 0 00 −4 00 0 3
=1 2 13 2 11 2 4
Transpose
𝑛×𝑚 0 = 𝑚×𝑛
Ex1:

Copyright©WESOLVETHEMLLC|WeSolveThem.com148
12345
0
= 1 2 34 5
Ex2:
1 2 31 3 2
0=
1 12 33 2
Ex3:
1 2 34 5 67 8 9
0
=1 4 72 5 83 6 9
Ex4:
𝐴𝐵 0 = 𝐵0𝐴0
4×3 3×5 0 = 3×5 0 4×3 0 = 5×3 3×4 = 5×4
SymmetricmatrixforA=LDU=LDL^T
𝐴 =1 3 43 1 34 3 −1
𝐸r𝐴 =1 0 0−3 1 0−4 0 1
1 3 43 1 34 3 −1
=1 3 40 −8 −90 −9 −17

Copyright©WESOLVETHEMLLC|WeSolveThem.com 149
𝐸q 𝐸r𝐴 =
1 0 00 1 0
0 −98 1
1 3 40 −8 −90 −9 −17
=
1 3 40 −8 −9
0 0 −558
𝐴 = 𝐿𝐷𝐿0 = 𝐿𝐷𝑈 =
1 0 03 1 0
498 1
1 0 00 −8 0
0 0 −558
1 0 03 1 0
498 1
0
∴ 𝐴 =
1 0 03 1 0
498 1
1 0 00 −8 0
0 0 −558
1 3 4
0 198
0 0 1
Matrixadditionandsubtraction
𝑛×𝑚 ± 𝑛×𝑚 = 𝑛×𝑚 Ex1:
𝐴 = 1 2 11 1 1 ∧ 𝐵 = 1 1 1
1 2 1 , 𝐴 + 𝐵 =?
𝐴 + 𝐵 = 1 2 11 1 1 + 1 1 1
1 2 1 = 1 + 1 2 + 1 1 + 11 + 1 1 + 2 1 + 1 = 2 3 2
2 3 2 Ex2:
𝐶 =1 22 22 2
∧ 𝐷 =1 11 11 1
, 𝐶 − 𝐷 =?
𝐶 − 𝐷 =1 22 22 2
−1 11 11 1
=1 − 1 2 − 12 − 1 2 − 12 − 1 2 − 1
=0 11 11 1
Ex3:
𝐴 + 𝐵 0 − 5 𝐶 − 𝐷 =?
2 3 22 3 2
0− 5
0 11 11 1
=2 23 32 2
−0 55 55 5
=2 −3−2 −2−3 −3

Copyright©WESOLVETHEMLLC|WeSolveThem.com150
Multiplythematrices(2x2)(2x3)
(𝑚×𝑛)(𝑛×𝑝) = (𝑚×𝑝)
(𝟐×2)(2×𝟑) = (2×3)
1 5−1 2
1 5 04 0 2 =
1 5 14 1 5 5
0 1 5 02
−1 2 14 −1 2 5
0 −1 2 02
= 1 1 + 5 4 1 5 + 5 0 1 0 + 5 2−1 1 + 2 4 −1 5 + 2 0 −1 0 + 2 2
= 21 5 10
7 −5 4
MatrixMultiplication(mxn)(nxp)
𝒎×𝒏 𝒏×𝒑 = 𝒎×𝒑 Matrixmultiplicationiskindoflikeagiant‘dotproduct’ThisistherowbycolumnmethodEx1:
2×2 2×1 = 2×1 : 1 21 1
31 =
1 2 31
1 1 31
= 1 3 + 2 11 3 + 1 1 = 5
4
Ex2:

Copyright©WESOLVETHEMLLC|WeSolveThem.com 151
2×3 3×1 = 2×1 : 1 2 22 1 2
131=
1 2 2131
2 1 2131
= 1 1 + 2 3 + 2 12 1 + 1 3 + 2 1 = 9
7
Ex3:
3×3 1𝑥3 = 𝐷𝑁𝐸:1 3 21 2 21 1 2
1 2 3
Ex4:
3×3 1𝑥3 0 = 3×3 3×1 = 3×1 :1 3 21 2 21 1 2
1 2 3 0 =1 3 21 2 21 1 2
123=
1 3 2123
1 2 2123
1 1 2123
=1 1 + 3 2 + 2 31 1 + 2 2 + 2 31 1 + 1 2 + 2 3
=13119
Ex5:
2×3 3×3 = 2×3 : 1 4 13 1 1
1 4 32 1 11 2 2
=1 4 1
121
1 4 1412
1 4 1312
3 1 1121
3 1 1412
3 1 1312
= 1 1 + 4 2 + 1 1 1 4 + 4 1 + 1 2 1 3 + 4 1 + 1 23 1 + 1 2 + 1 1 3 4 + 1 1 + 1 2 3 3 + 1 1 + 1 2
= 10 10 9
6 15 12 Ex6:

Copyright©WESOLVETHEMLLC|WeSolveThem.com152
2×3 3×3 3×2 = 2×3 3×2 = 2×2 :
1 4 13 1 1
1 4 32 1 11 2 2
1 00 11 0
= 10 10 96 15 12
1 00 11 0
= 19 1018 15
Idempotentmatrix
𝐴𝐴 = 𝐴 ⇒ 𝐴0 = 𝐴Ex1:
𝐴 =2 −2 −4−1 3 41 −2 −3
⇒ 𝐴𝐴 =2 −2 −4−1 3 41 −2 −3
2 −2 −4−1 3 41 −2 −3
=2 −2 −4−1 3 41 −2 −3
⇒ 𝐴𝐴𝐴 =2 −2 −4−1 3 41 −2 −3
2 −2 −4−1 3 41 −2 −3
2 −2 −4−1 3 41 −2 −3
=2 −2 −4−1 3 41 −2 −3
⇒ 𝐴0 =2 −2 −4−1 3 41 −2 −3
0
=2 −2 −4−1 3 41 −2 −3
= 𝐴
Ex2:(2X2)DetermineifAisIdempotentwithoutmultiplication
𝐴 = 𝑎 𝑏𝑐 𝑑 ⇒ 𝐴Ö = 𝑎q + 𝑏𝑐 𝑎𝑏 + 𝑏𝑑
𝑐𝑎 + 𝑐𝑑 𝑏𝑐 + 𝑑qÖ= 𝑎q + 𝑏𝑐 𝑎𝑏 + 𝑏𝑑
𝑐𝑎 + 𝑐𝑑 𝑏𝑐 + 𝑑q
4 −112 −3
𝑎 = 𝑎q + 𝑏𝑐 ⇒ 4 = 4q + −1 12 = 16 − 12 = 4
𝑏 = 𝑎𝑏 + 𝑏𝑑 ⇒ −1 = 4 −1 + −1 −3 = −4 + 3 = −1
𝑐 = 𝑐𝑎 + 𝑐𝑑 ⇒ 12 = 12 4 + 12 −3 = 48 − 36 = 12
𝑑 = 𝑏𝑐 + 𝑑q ⇒ −3 = −1 12 + −3 q = −12 + 9 = −3
∴ 4 −112 −3
4 −112 −3 = 4 −1
12 −3 = 4 −112 −3
Ö,YesAisidempotent

Copyright©WESOLVETHEMLLC|WeSolveThem.com 153
RotationandTranslateEx.1Givethe4×4matrixthatrotatespointsinℝoaboutthe𝑧-axisthroughanangleof−30°,andthentranslatesby𝐩 = 5,−2, 1 Unitpointsinℝoandjust𝒗 = 𝒆r, 𝒆q, 𝒆o ,note:𝒆0 = 0, 0, … 1,… 0, 0 Aboutthe𝑧-axismeanstoCreatea3×3rotationmatrixfor−30°about𝑧-axis(1)Wewanttomoveapointonthe𝑥𝑦-plane30°towards– 𝑦-axis,whichiscos −30° , sin −30° , 0 = o
q, − r
q, 0 .Note:wearemoving𝑥inapositivedirection,and𝑦ina
negativedirectioni.e.choosetheanglewisely.(2)Nextwewanttomoveapointinthe𝑥𝑦-planetowardsthepositive𝑥-axis(twopositivecoordinates)Lookattheunitcircle,coordinate(0,1).Weanttomovethis−30°thecoordinateforthisis cos 60° , sin 60° = r
q, oqjustput
thisinto3×1columnvector rq, oq, 0
(3)Sincewearegoingaboutthe𝑧-axis,thethirdcoordinate 0,0,1 doesnotmove.Finally,wegetthefollowingmatrix𝐴
𝐴 =
32
12 0
−12
32 0
0 0 1
⇒
32
12
−12
32
0 00 0
0 00 0
1 00 1
Translatedvector:Mapping𝑥, 𝑦, 𝑧, 1 → 𝑥 + 5, 𝑦 − 2, 𝑧 + 1,1 givesthefollowingmatrix
𝑥 + 5𝑦 − 2𝑧 + 11
=
𝑥 + 0𝑦 + 0𝑧 + 50𝑥 − 0𝑦 + 0𝑧 − 20𝑥 + 0𝑦 + 𝑧 + 10𝑥 + 0𝑦 + 0𝑧 + 1
=1 00 1
0 50 −2
0 00 0
1 10 1
𝑥𝑦𝑧1

Copyright©WESOLVETHEMLLC|WeSolveThem.com154
∴1 00 1
0 50 −2
0 00 0
1 10 1
32
12
−12
32
0 00 0
0 00 0
1 00 1
=
32
12
−12
32
0 50 −2
0 00 0
1 10 1
Ex.2TranslateTranslateby −2, 3 ,andthenscalethe𝑥-coordinateby0.8andthe𝑦-coordinateby1.2.Note:Wheneveryoutranslateavector,addanadditionaldimensionwithelementas#1i.e.
ℝ0×r ⟼ ℝ 0�r ×r ⇒ −23 →
−23𝟏
Translate:
𝑥, 𝑦, 1 → (𝑥 + 2, 𝑦 + 3, 1)Scale𝑥-coordinate:
𝟎.𝟖 1, 0, 0 = 𝟎.𝟖, 0, 0 Scale𝑦-coordinate:
𝟏.𝟐 0, 1, 0 = 0, 𝟏.𝟐, 0 Assemblethe3×3matrixwiththescaledpositions:
𝟎.𝟖 0 00 𝟏.𝟐 00 0 𝟏
Assemblethe3×3translatematrix
𝑥 + 2, 𝑦 + 3, 1 =𝑥 − 2𝑦 + 31
=𝑥 + 0𝑦 − 20𝑥 + 𝑦 + 30𝑥 + 0𝑦 + 1
=1 0 −20 1 30 0 1
𝑥𝑦1
∴0.8 0 00 1.2 00 0 1
1 0 −20 1 30 0 1
=0.8 0 −1.60 1.2 3.60 0 1
Copyright©WESOLVETHEMLLC|WeSolveThem.com 155
Rotateaboutapoint 𝒄, 𝒅 Note:𝐷=dilate,𝑅 =rotation,𝑇 =translate.Scale𝑥 ∧ 𝑦by𝛼,rotateby𝜃,andtranslate 𝑎, 𝑏
𝐷 =𝛼 0 00 𝛼 00 0 1
, 𝑅 =cos 𝜃 − sin 𝜃 0sin 𝜃 cos 𝜃 00 0 1
,𝑇 =1 0 𝑎0 1 𝑏0 0 1
1 0 𝑐0 1 𝑑0 0 1
cos 𝜃 − sin 𝜃 0sin 𝜃 cos 𝜃 00 0 1
1 0 −𝑐0 1 −𝑑0 0 1
Nilpotentmatrix(eigenvaluesarezero)
𝐴0�0Ö = 0, 𝑘 ≤ 𝑛Ex1:
𝐴 =0 1 10 0 10 0 0
𝐴q =0 1 10 0 10 0 0
0 1 10 0 10 0 0
=0 0 10 0 00 0 0
𝐴o =0 1 10 0 10 0 0
0 1 10 0 10 0 0
0 1 10 0 10 0 0
=0 0 00 0 00 0 0

Copyright©WESOLVETHEMLLC|WeSolveThem.com156
Ex2:Find𝑘suchthat𝐴Ö = 0
10 −6 430 −18 1220 −12 8
10 −6 430 −18 1220 −12 8
=
10 −6 4103020
10 −6 4−6−18−12
10 −6 44128
30 −18 12103020
30 −18 12−6−18−12
30 −18 124128
20 −12 8103020
20 −12 8−6−18−12
20 −12 84128
Note: 𝑎 𝑏 𝑐𝑑𝑒𝑓= 𝑎 𝑑 + 𝑏 𝑒 + 𝑐 𝑓
=0 0 00 0 00 0 0
∴ 𝑘 = 2
Determinantrules
(1) det 𝐴0 = det 𝐴(2) det 𝐴pr = r
îï- �
(3) det 𝐴𝐵 = det 𝐴 det 𝐵 ⇔ 𝐴 = 𝑛𝑥𝑛 = 𝐵(4) det 𝑐𝐴 = 𝑐0 det 𝐴 𝑓𝑜𝑟𝑛𝑥𝑛
Givendet 𝐴pr = 5, det 𝐵0 = 6
Evaluatedet 𝐴𝐵 + det 5𝐴 𝐵0 ,𝐴 = 4𝑥4 = 𝐵
det 𝐴𝐵 + det 5𝐴 𝐵0 = det 𝐴 det 𝐵 + det 5𝐴 det 𝐵0 = det 𝐴 det 𝐵 + 5Ü det 𝐴 det 𝐵
∵ det 𝐴pr =1
det 𝐴 ∴ det 𝐴pr = 5 ⇒
1det 𝐴 = 5 ⇔ det 𝐴 =
15

Copyright©WESOLVETHEMLLC|WeSolveThem.com 157
=15 6 + 5Ü
15 6 =
65 + 5
o ⋅ 6 =66130
ProofsLet𝐴and𝑃besquarematrices,with𝑃invertible.Showthatdet 𝑃𝐴𝑃pr = det 𝐴.Usingdeterminantrule2i.e.det 𝐴pr = r
îï- �,wefind:
det 𝑃𝐴𝑃pr = det 𝑃 det 𝐴 det 𝑃pr =det 𝑃 det 𝐴det 𝑃 =
det 𝑃det 𝑃 det 𝐴 = det 𝐴
Findaformulafordet 𝑟𝐴 when𝐴isan𝑛×𝑛matrix.Longversion
𝐴 = 𝐿𝑈𝐷 ⇒𝑎rr ⋯ 𝑎r0⋮ ⋱ ⋮𝑎0r ⋯ 𝑎00
=1 0 0⋮ 1 0𝑙0r ⋯ 1
1 ⋯ 𝑢r00 1 ⋮0 0 1
𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑑00
1 0 0⋮ 1 0𝑙0r ⋯ 1
1 ⋯ 𝑢r00 1 ⋮0 0 1
𝑟𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑑00
= det1 0 0⋮ 1 0𝑙0r ⋯ 1
1 ⋯ 𝑢r00 1 ⋮0 0 1
𝑟𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑑00
det1 0 0⋮ 1 0𝑙0r ⋯ 1
det1 ⋯ 𝑢r00 1 ⋮0 0 1
det 𝑟𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑑00
= 1 1 det 𝑟𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑑00
= det𝑟𝑑rr ⋯ 0⋮ ⋱ ⋮0 ⋯ 𝑟𝑑00
= 𝑟𝑑rr𝑟𝑑qq … 𝑟𝑑00 = 𝑟0𝑑rr𝑑qq …𝑑00 = 𝑟0 det 𝐴
Shortversion
det 𝑟𝐴 = det 𝑟𝐿𝑈𝐷 = det 𝐿𝑈 𝑟𝐷 = det 𝐿𝑈 det 𝑟𝐷 = 1 𝑟𝑑r𝑟𝑑q𝑟𝑑o ⋯𝑟𝑑0
= 1 𝑟0 det 𝐷 = det 𝐿𝑈 𝑟 det𝐷 = 𝑟 det 𝐿𝑈 det𝐷 = 𝑟 det 𝐿𝑈𝐷 = 𝑟 det 𝐴

Copyright©WESOLVETHEMLLC|WeSolveThem.com158
Determinate’sofa(2x2)matrixVariouswaystocheckdeterminant(2x2):
𝐴 = 𝑎 𝑏
𝑐 𝑑 ⇒ det 𝐴 = 𝐴 = 𝑎 𝑏𝑐 𝑑 = 𝑎 𝑑 − 𝑏 𝑐
𝐴 = 𝑎 𝑏
0 𝑐 ⇒ det 𝐴 = 𝐴 = 𝑎 𝑏0 𝑐 = 𝑎 𝑐
𝐴 = 𝑎 0
0 𝑏 ⇒ det 𝐴 = 𝐴 = 𝑎 00 𝑏 = 𝑎 𝑏
Formula:
1 −32 1 = 1 1 — 3 2 = 1 + 6 = 7
1 2−1 −2 = 1 −2 − 2 −1 = −2 + 2 = 0
1 30 −3 = 1 −3 = −3
1 00 −5 = 1 −5 = −5
Rowoperation:
1 34 5 ~ 1 3
0 −7 ⇒ 1 34 5 = 1 −7 = −7
−4𝑅1 + 𝑅2 = −4 −12 + 4 5 = 0 −7 ⇐ 𝑅2Noteforfuturereference:
𝐴 = 𝐸r𝑈 ⇒1 34 5 = 1 0
4 11 30 −7 ⇒ det 𝐴 = det𝐸r𝑈 = det𝐸r det 𝑈 =
1 04 1
1 30 −7
= 1 1 1 −7 = −7

Copyright©WESOLVETHEMLLC|WeSolveThem.com 159
Determinateofa(3x3)andhighermatricesCofactorExpansionNote:
𝑎 𝑏𝑐 𝑑 = 𝑎 𝑑 − 𝑏 𝑐
𝑎 𝑏 𝑐𝑑 𝑒 𝑓𝑔 ℎ 𝑖
= +𝑎 𝑒 𝑓ℎ 𝑖
− 𝑏 𝑑 𝑓𝑔 𝑖 + 𝑐 𝑑 𝑒
𝑔 ℎ
𝑎 𝑏𝑒 𝑓
𝑐 𝑑𝑔 ℎ
𝑖 𝑗𝑚 𝑛
𝑘 𝑙𝑜 𝑝
= +𝑎𝑓 𝑔 ℎ𝑗 𝑘 𝑙𝑛 𝑜 𝑝
− 𝑏𝑒 𝑔 ℎ𝑖 𝑘 𝑙𝑚 0 𝑝
+ 𝑐𝑒 𝑓 ℎ𝑖 𝑗 𝑙𝑚 𝑛 𝑝
− 𝑑𝑒 𝑓 𝑔𝑖 𝑗 𝑘𝑚 𝑛 𝑜
Cofactorexpansion:(bestfor3x3andhigherbutrowoperationscanbeeasierNote:Payattentionto0’s
𝑎 𝑏 𝑐𝑑 𝑒 𝑓0 ℎ 0
= +0 𝑏 𝑐𝑒 𝑓 − ℎ
𝑎 𝑐𝑑 𝑓 + 0 𝑎 𝑏
𝑑 𝑒 = −ℎ𝑎 𝑐𝑑 𝑓
Example1:
1 2 22 1 11 3 4
= + 1 1 13 4 − 2 2 1
1 4 + 2 2 11 3
= + 1 1 4 − 1 3 − 2 2 4 − 1 1 + 2 2 3 − 1 1 = −3
Example2:(lookforthezero’selseitwillbeapain!)
1 33 2
3 11 1
0 01 2
0 43 0
= +03 3 12 1 12 3 0
− 01 3 13 1 11 3 0
+ 01 3 13 2 11 2 0
− 41 3 33 2 11 2 3
= −41 3 33 2 11 2 3
= −4 −8 = 32

Copyright©WESOLVETHEMLLC|WeSolveThem.com160
Example3:
1 03 2
0 11 1
0 01 2
0 43 0
= +00 0 12 1 12 3 0
− 01 0 13 1 11 3 0
+ 01 0 13 2 11 2 0
− 41 0 03 2 11 2 3
= −41 0 03 2 11 2 3
= −4 +1 2 12 3 − 0 3 1
1 3 + 0 3 21 2 = −4 2 3 − 1 2 = −4 4 = −16
RowOperations:Youmustfollowtheexactelementremovalforthistowork
∗ ∗ ∗1𝑠𝑡 ∗ ∗2𝑛𝑑 3𝑟𝑑 ∗
,
∗ ∗1𝑠𝑡 ∗
∗ ∗∗ ∗
2𝑛𝑑 4𝑡ℎ3𝑟𝑑 5𝑡ℎ
∗ ∗6𝑡ℎ ∗
𝐴 =1 2 22 1 11 3 4
⇒ det 𝐴 = −3
−2𝑅1 + 𝑅2 = −2 −4 −4 + 2 1 1 = 0 −3 −3 ⇐ 𝑅2
1 2 22 1 11 3 4
~1 2 20 −3 −31 3 4
−𝑅1 + 𝑅3 = −1 −2 −2 + 1 3 4 = 0 1 2 ⇐ 𝑅3
1 2 22 1 11 3 4
~1 2 20 −3 −31 3 4
~1 2 20 −3 −30 1 2
13𝑅2 + 𝑅3 = 0 −1 −1 + 0 1 2 = 0 0 1 ⇐ 𝑅3
∴1 2 22 1 11 3 4
~1 2 20 −3 −31 3 4
~1 2 20 −3 −30 1 2
~1 2 20 −3 −30 0 1
⇒ det 𝐴 = 1 −3 1 = −3
Thisworksbecausewedecomposed𝐴usingelementarymatrices.Youwillprobablytouchonthislaterbuthereitis.
𝐴 =1 2 22 1 11 3 4
=1 0 02 1 01 0 1
1 0 00 1 0
0 −13 1
1 2 20 −3 −30 0 1
=
1 0 02 1 0
1 −13 1
1 2 20 −3 −30 0 1
Copyright©WESOLVETHEMLLC|WeSolveThem.com 161
= 𝐸q𝐸r𝑈 = 𝐿𝑈 ⇒ det 𝐿𝑈 = det 𝐿 det 𝑈 = 1 −3 = −3
VectorSpace,SubspaceandSubsetAsetisvectorspaceif:
1. 𝒖+ 𝒗 ∈ 𝑉2. 𝒖+ 𝒗 = 𝒗 + 𝒖3. 𝒖+ 𝒗 +𝒘 = 𝒖+ 𝒗 +𝒘 4. 𝒖+ 𝟎 = 𝒖.5. 𝒖+ −𝒖 = 06. 𝑐𝒖 ∈ 𝑉.7. 𝑐 𝒖+ 𝒗 = 𝑐𝒖+ 𝑐𝒗8. 𝑐 + 𝑑 𝒖 = 𝑐𝒖+ 𝑑𝒖9. 𝑐 𝑑𝒖 = 𝑐𝑑 𝒖10. 1𝒖 = 𝒖
Asetisasubspaceif:
a. Thezerovectorof𝑉isin𝐻.b. 𝐻isclosedundervectoraddition.c. 𝐻isclosedunderscalarmultiplication.
Whenshowingthefollowingsetsaresubspaces,thezerovectorsisevaluatingallconstantsat0Determineifthesetisasubspaceofℙ0Allpolynomialsoftheform𝒑 𝑡 = 𝑎 + 𝑡q,where𝑎 ∈ ℝ1)𝑎 = 0 ⇒ 0 + 𝑡q = 𝑡q ∉ ℙo ∴notasubspaceNoAllpolynomialsinℙ0suchthat𝑃 0 = 0(1)
𝑃 0 = 0 ⇒ 𝑃 𝑡 = 𝑎r𝑡 + 𝑎q𝑡q + 𝑎o𝑡o + ⋯+ 𝑎0pr𝑡0pr ∴ 𝑎0pr = 𝟎 ⇒ 𝑃 0 = 0Case1:True
(2)
𝑃r + 𝑃q = 𝑎r𝑡 + 𝑎q𝑡q + 𝑎o𝑡o + ⋯+ 𝑎0pr𝑡0pr + 𝑏r𝑡 + 𝑏q𝑡q + 𝑏o𝑡o + ⋯+ 𝑏0pr𝑡0pr
= 𝑎 + 𝑏 r𝑡 + 𝑎 + 𝑏 q𝑡q + 𝑎 + 𝑏 o𝑡o + ⋯+ 𝑎 + 𝑏 0pr𝑡0pr ⇒ 𝑃r + 𝑃q 0 = 0Case2:True(3)

Copyright©WESOLVETHEMLLC|WeSolveThem.com162
𝑐𝑃 = 𝑐 𝑎r𝑡 + 𝑎q𝑡q + 𝑎o𝑡o + ⋯+ 𝑎0pr𝑡0pr = 𝑐𝑎 r𝑡 + 𝑐𝑎 q𝑡q + 𝑐𝑎 o𝑡o + ⋯+ 𝑐𝑎 0pr𝑡0pr⇒ 𝑐𝑃 0 = 0
Case3:True-Yesitisasubspaceofℙ0
Cramer’srules
𝑥0 =det 𝐴0 𝒃det 𝐴
ThesolutioninawayyoumayalreadyknowisRref[{4,1,6},{3,2,7}]
4 13 2
67 ~ 𝐼q
12 ⇒ 𝒙 = 𝑥r = 1
𝑥q = 2
Letsfindthiswith“Cramer’sRule”
4 𝟏3 𝟐
𝟔𝟕 ⇒ 𝐴r 𝒃 = 𝟔 𝟏
𝟕 𝟐 ⇒ det 𝐴r 𝒃 = 2 6 − 1 7 = 12 − 7 = 5
∴ 𝑥r =det 𝐴r 𝒃det 𝐴 =
55 = 1
𝟒 1𝟑 2
𝟔𝟕 ⇒𝐴q 𝒃 = 𝟒 𝟔
𝟑 𝟕 ⇒ det 𝐴q 𝒃 = 4 7 − 6 3 = 10
∴ 𝑥q =det 𝐴q 𝒃det 𝐴 =
105 = 2
IMPORTANT:Noticethattheindexof𝐴isthelocationof𝒃i.e.ifyouhada4×4𝐴o 𝒃 = 𝒗r 𝒗q 𝒃 𝒗o
BasiscoordinatevectorGivenasetℬ,andvector𝑥putℬintoamatrixequation𝐴𝒖 = 𝑥 ⇒ 𝒖 = 𝑥 ℬ Ex.1
𝑏r =1−3 , 𝑏q =
−35 , 𝑥 = −7
5
1 −3−3 5 𝑥 ℬ =
−75 ⇒ 1 −3
−3 5−75 ~ 1 0
0 154 ⇒ 𝑥 ℬ = 5,4
∨∵ det 𝐴 ≠ 0, 𝑥 ℬ = 𝐴pr𝑥 =1
1 5 − −3 −35 33 1
−75 = −
14−20−16 = 5
4

Copyright©WESOLVETHEMLLC|WeSolveThem.com 163
∴ 𝑥 ℬ =
54
Ex.2
𝑏r =−31−4
, 𝑏q =75−6
, 𝑥 =1107
𝑥 ℬ =
𝑐r𝑐q⋮𝑐0
⇔ ℬ = 𝑏r, 𝑏q, … , 𝑏0 ⇒ 𝑏r𝑐r + 𝑏q𝑐q + ⋯+ 𝑏0𝑐0 = 𝒙
−31−4
𝑐r +75−6
𝑐q =1107
⇒−3 71 5−4 −6
1107
~1 00 10 0
−52120
∴ 𝑥 ℬ =12−52

Copyright©WESOLVETHEMLLC|WeSolveThem.com164
Adjugateofamatrix
𝐴pr =ajd 𝐴det 𝐴
𝐴 = 𝑎 𝑏
𝑐 𝑑 ⇒ adj 𝐴q×q = +𝑑 −𝑏−𝑐 +𝑎
𝐴 =𝑎 𝑏 𝑐𝑑 𝑒 𝑓𝑔 ℎ 𝑖
⇒ adj 𝐴o×o =
+ 𝑒 𝑓ℎ 𝑖
− 𝑑 𝑓𝑔 𝑖 + 𝑑 𝑒
𝑔 ℎ
− 𝑏 𝑐ℎ 𝑖 +
𝑎 𝑐𝑔 𝑖 − 𝑎 𝑏
𝑔 ℎ
+ 𝑏 𝑐𝑒 𝑓 −
𝑎 𝑐𝑑 𝑓 + 𝑎 𝑏
𝑑 𝑒
0
𝐴 =
𝑎 𝑏𝑒 𝑓
𝑐 𝑑𝑔 ℎ
𝑖 𝑗𝑚 𝑛
𝑘 𝑙𝑜 𝑝
⇒ adj 𝐴Ü×Ü
=
+𝑓 𝑔 ℎ𝑗 𝑘 𝑙𝑛 𝑜 𝑝
−𝑒 𝑔 ℎ𝑖 𝑘 𝑙𝑚 𝑜 𝑝
−𝑏 𝑐 𝑑𝑗 𝑘 𝑙𝑛 𝑜 𝑝
+𝑎 𝑐 𝑑𝑖 𝑘 𝑙𝑚 𝑜 𝑝
+𝑒 𝑓 ℎ𝑖 𝑗 𝑙𝑚 𝑛 𝑝
−𝑒 𝑓 𝑔𝑖 𝑗 𝑘𝑚 𝑛 𝑜
−𝑎 𝑏 𝑑𝑖 𝑗 𝑙𝑚 𝑛 𝑝
+𝑎 𝑏 𝑐𝑖 𝑗 𝑘𝑚 𝑛 𝑜
+𝑏 𝑐 𝑑𝑓 𝑔 ℎ𝑛 𝑜 𝑝
−𝑎 𝑐 𝑑𝑒 𝑔 ℎ𝑚 𝑜 𝑝
−𝑏 𝑐 𝑑𝑓 𝑔 ℎ𝑗 𝑘 𝑙
+𝑎 𝑐 𝑑𝑒 𝑔 ℎ𝑖 𝑘 𝑙
+𝑎 𝑏 𝑑𝑖 𝑗 𝑙𝑚 𝑛 𝑝
−𝑎 𝑏 𝑐𝑖 𝑗 𝑘𝑚 𝑛 𝑜
−𝑎 𝑏 𝑑𝑒 𝑓 ℎ𝑒 𝑗 𝑙
+𝑎 𝑏 𝑐𝑒 𝑓 𝑔𝑖 𝑗 𝑘
0

Copyright©WESOLVETHEMLLC|WeSolveThem.com 165
ComputetheAdjugate
𝐴 =1 1 3−2 2 10 1 1
𝐵 =𝑎 𝑏 𝑐𝑑 𝒆 𝒇𝑔 𝒉 𝒊
⇒ adj 𝐵 =
+ 𝒆 𝒇𝒉 𝒊
− 𝑑 𝑓𝑔 𝑖 + 𝑑 𝑒
𝑔 ℎ
− 𝑏 𝑐ℎ 𝑖 +
𝑎 𝑐𝑔 𝑖 − 𝑎 𝑏
𝑔 ℎ
+ 𝑏 𝑐𝑒 𝑓 −
𝑎 𝑐𝑑 𝑓 + 𝑎 𝑏
𝑑 𝑒
0
adj A =
+ 2 11 1 − −2 1
0 1 + −2 20 1
− 1 31 1 + 1 3
0 1 − 1 10 1
+ 1 32 1 − 1 3
−2 1 + 1 1−2 2
0
=+ 2 1 − 1 1 − −2 1 − 1 0 + −2 1 − 2 0− 1 1 − 3 1 + 1 1 − 3 0 − 1 1 − 1 0+ 1 1 − 2 3 − 1 1 − 3 −2 + 1 2 − 1 −2
0
=𝟏 𝟐 −𝟐𝟐 𝟏 −𝟏−5 −7 4
0
=𝟏 𝟐 −5𝟐 𝟏 −7−𝟐 −𝟏 4
Inverseofa2x2Matrix
Inverseof 𝟐×𝟐 :
Option1)
𝐴 𝐼 ~ 𝐼 𝐴pr
−3 21 3
1 00 1 ~ 1 0
0 1− 311
211
111
311

Copyright©WESOLVETHEMLLC|WeSolveThem.com166
Option2)
𝐴 = 𝑎 𝑏𝑐 𝑑 ⇒ 𝐴pr =
adj 𝐴det 𝐴 =
1𝑎𝑑 − 𝑏𝑐
𝑑 −𝑏−𝑐 𝑎 ∧ 𝐴𝑥 = 𝑏 ⇒ 𝑥 = 𝐴pr𝑏 ⇔ det 𝐴 ≠ 0
𝐴 = −3 21 3 ⇒ 𝐴pr =
1−3 3 − 2 1
3 −2−1 −3 = −
111
3 −2−1 −3 =
111
−3 21 3
SolveasystemofequationswithaninverseTheorem:
𝐴𝒙 = 𝑏 ⇒ 𝐴pr𝐴𝒙 = 𝐴pr𝑏 ⇒ 𝐼𝒙 = 𝐴pr𝑏 ⇒ 𝒙 = 𝐴pr𝑏 ⇔ det 𝐴 ≠ 0(Note:𝑥 = 𝒙 = 𝑥r, 𝑥q, … , 𝑥0 )
−3 21 3 𝒙 = 2
1 ⇒ 𝒙 = −111
3 −2−1 −3
21 = −
111
3 −2 21
−1 −3 21
= −111
3 2 + −2 1−1 2 + −3 1
= −111
6 − 2−2 − 3 = −
111
4−5 =
−411511
Similarlyyoucouldsolvewithrrefi.e.
−3 21 3 𝒙 = 2
1 ⇒ −3 21 3
21 ~ 1 0
0 1− 411511

Copyright©WESOLVETHEMLLC|WeSolveThem.com 167
Inverseof3x3
𝐴𝒙 = 𝑏 ⇒ 𝐴pr𝐴𝒙 = 𝐴pr𝑏 ⇒ 𝐼𝒙 = 𝐴pr𝑏 ⇒ 𝒙 = 𝐴pr𝑏 ⇔ det 𝐴 ≠ 0Option1)
𝐴 𝐼 ~ 𝐼 𝐴pr
𝐴 =1 1 21 2 12 1 1
(symmetricmatrix)
1 1 21 2 12 1 1
1 0 00 1 00 0 1
~1 0 00 1 00 0 1
−14 −1434
−1434 −14
34 −14 −14
⇒ 𝐴pr = −14
1 1 −31 −3 1−3 1 1
Option2)
𝐴pr =adj 𝐴det 𝐴
𝐴 =1 1 21 2 12 1 1
⇒ det 𝐴 = −4 ∧ adj 𝐴 = −
+ 2 11 1 − 1 1
2 1 + 1 22 1
1 21 1 + 1 2
2 1 − 1 12 1
+ 1 22 1 − 1 2
1 1 + 1 11 2
=+ 2 1 − 1 1 − 1 1 − 1 2 + 1 1 − 2 2− 1 1 − 1 2 + 1 1 − 2 2 − 1 1 − 1 2+ 1 1 − 2 2 − 1 1 − 1 2 + 1 2 − 1 1
=1 1 −31 −3 1−3 1 1
alsosymmetric
∴ 𝐴pr =adj 𝐴det 𝐴 = −
14
1 1 −31 −3 1−3 1 1
alsosymmetric

Copyright©WESOLVETHEMLLC|WeSolveThem.com168
Trace
𝑡𝑟 𝐴 = 𝜆0
det 𝐴 − 𝐼𝜆 = 0Ex1:
𝐴 =1 20 2
2 22 2
0 00 0
1 10 −1
⇒ 𝑡𝑟 𝐴 = 1 + 2 + 1 − 1 = 3
Ex2:
𝐴 =1 2 22 2 11 2 2
⇒ det 𝐴 − 𝐼𝜆 =1 − 𝜆 2 22 2 − 𝜆 11 2 2 − 𝜆
= 0
⇒ 1 − 𝜆 2 − 𝜆 1
2 2 − 𝜆 − 2 2 11 2 − 𝜆 + 2 2 2 − 𝜆
1 2 = 0
⇒ 1 − 𝜆 2 − 𝜆 2 − 𝜆 − 2 1 − 2 2 2 − 𝜆 − 1 1 + (2) 2 2 − 1 2 − 𝜆
= 5 − 𝜆 𝜆q = 0 ⇒ 𝜆 = 0,5
∴ 𝑡𝑟 𝐴 = 0 + 5 = 5Ex3:Given𝑡𝑟 𝐴 = 5 ∧ det 𝐴 = 6,find𝐴
𝐴 = 𝑎 10 𝑑
det 𝐴 = 𝑎𝑑 = 6
𝑡𝑟 𝐴 = 𝑎 + 𝑑 = 5
∴ 𝑑 = 5 − 𝑎 ⇒ 𝑎 5 − 𝑎 = 6 ⇒ 5𝑎 − 𝑎q = 6 ⇒ 𝑎q − 5𝑎 + 6 = 𝑎 − 2 𝑎 − 3 = 0
⇔ 𝑎 = 2 ∨ 𝑎 = 3 ⇒ 𝑑 = 2 ∨ 𝑑 = 3
∴ 𝑎, 𝑑 = 2,3 ∨ 𝑎, 𝑑 = 3,2
⇒ 𝐴 = 2 1
0 3 ∨ 3 10 2

Copyright©WESOLVETHEMLLC|WeSolveThem.com 169
CholeskyDecomposition
𝐴 = 𝐿𝐷𝑈 = 𝐿𝐷𝐿0 = 𝐿𝐷rq𝐷
rq𝐿0 = 𝐿𝐷
rq 𝐷
rq𝐿0 = 𝐾∗𝐾
𝐴 =9 00 9
−27 18−9 −27
−27 −918 −27
99 −27−27 121
Useelementarymatricestofind𝐿(watchlessononElementaryMatricesandorLDUdecomposition)
𝐿 =1 00 1
0 00 0
−9 −36 −9
1 00 1
∧ 𝑈 = 𝐿0 =1 00 1
−9 6−3 −9
0 00 0
1 00 1
𝐷 =9 00 9
0 00 0
0 00 0
9 00 4
⇒ 𝐷rq =
3 00 3
0 00 0
0 00 0
3 00 2
∴ 𝐿𝐷rq𝐷
rq𝐿0 =
1 00 1
0 00 0
−9 −36 −9
1 00 1
3 00 3
0 00 0
0 00 0
3 00 2
3 00 3
0 00 0
0 00 0
3 00 2
1 00 1
−9 6−3 −9
0 00 0
1 00 1
=3 00 3
0 00 0
−9 −36 −9
3 00 2
3 00 3
−9 6−3 −9
0 00 0
3 00 2
= 𝐾∗𝐾

Copyright©WESOLVETHEMLLC|WeSolveThem.com170
Eigenvalues
𝐴 =1 2 22 1 10 0 1
⇒ det 𝐴 − 𝐼𝜆 =1 − 𝜆 2 22 1 − 𝜆 10 0 1 − 𝜆
1 − 𝜆 2 22 1 − 𝜆 10 0 1 − 𝜆
= 0 ⋅ 2 21 − 𝜆 1 − 0 ⋅ 1 − 𝜆 2
2 1 + 1 − 𝜆 1 − 𝜆 22 1 − 𝜆
∴ 1 − 𝜆 1 − 𝜆 22 1 − 𝜆 = 1 − 𝜆 1 − 𝜆 q − 4 = 1 − 𝜆 −3 − 2𝜆 + 𝜆q
= 1 − 𝜆 𝜆 + 1 𝜆 − 3
CharacteristicPolynomial:𝑝 𝜆 = 1 − 𝜆 𝜆 + 1 𝜆 − 3 ⇒ 𝑝 𝜆 = 0 ⇔ 𝜆 = −1, 1, 3
𝑒𝑖𝑔𝑒𝑛𝑣𝑎𝑙𝑢𝑒𝑠 𝐴 = −1, 1, 3
EigenvectorsPartII-EasiestwaytofindEigenVectors
𝐴 =1 2 22 1 10 0 1
⇒ det 𝐴 − 𝐼𝜆 =1 − 𝜆 2 22 1 − 𝜆 10 0 1 − 𝜆
= 0 ⇒ 𝜆 = −1, 1, 3
𝜆r ⇒1 − −1 2 2
2 1 − −1 10 0 1 − −1
=2 2 22 2 10 0 2
~1 1 00 0 10 0 0
⇒ 𝒙 = 𝑠r−110
⇒ 𝑣r =−110
𝜆q ⇒1 − 1 2 22 1 − 1 10 0 1 − 1
=0 2 22 0 10 0 0
~1 0
12
0 1 10 0 0
⇒ 𝒙 = % q−12
−11
⇒ 𝑣q =−1−22
𝜆o ⇒1 − 3 2 22 1 − 3 10 0 1 − 3
=−2 2 22 −2 10 0 −2
~1 −1 00 0 10 0 0
⇒ 𝒙 = 𝑠o110
⇒ 𝑣o =110

Copyright©WESOLVETHEMLLC|WeSolveThem.com 171
Note:𝑠isafreevariablei.e.𝑠r = 1, 𝑠q = 2, 𝑠o = 1
∴ 𝛬 =−110
,−1−22
,110
DiagonlizeaMatrixPartIII-Diagonlize𝐴 = 1,2,2 , 2,1,1 , 0,0,1 ,notedet 𝐴 ≠ 0 ∴ 𝐴 = 𝑆𝐷𝑆pr
𝐴 =1 2 22 1 10 0 1
⇒ det 𝐴 − 𝐼𝜆 =1 − 𝜆 2 22 1 − 𝜆 10 0 1 − 𝜆
= 0 ⇒ 𝜆 = −1, 1, 3
𝑣r, 𝑣q, 𝑣o =−110
,−1−22
,110
𝐴 = 𝑆𝐷𝑆pr = 𝑣r𝑣q𝑣o 𝜆r𝑒r𝜆q𝑒q𝜆o𝑒o 𝑣r𝑣q𝑣o pr
Note:𝑒0 = 0, 0,⋯ , 1,⋯ , 0
∴ 𝐴 = 𝑆𝐷𝑆pr =−1 −1 11 −2 10 2 0
−1 0 00 1 00 0 3
−1 −1 11 −2 10 2 0
pr
=−1 −1 11 −2 10 2 0
−1 0 00 1 00 0 3
−12
12
14
0 012
12
12
34

Copyright©WESOLVETHEMLLC|WeSolveThem.com172
SingularValueDecomposition
𝐴 = 𝑈𝛴𝑉0 , 𝐴 =1 10 1−1 1
Identifytheunknowns
𝑉0 = 𝑒𝑖𝑔𝑒𝑛𝑣𝑒𝑐𝑡𝑜𝑟𝑠 𝐴0𝐴 0 =𝑣r𝑣q
𝑈 =1𝜎r𝐴𝑣r
1𝜎q𝐴𝑣q
𝑁𝑆 𝐴0
𝑁𝑆 𝐴0, 𝛴 =
𝜎r 00 𝜎q0 0
⇔ 𝜎0 = 𝜆0
∴ 𝐴 =1𝜎r𝐴𝑣r
1𝜎q𝐴𝑣q
𝑁𝑆 𝐴0
𝑁𝑆 𝐴0𝜎r 00 𝜎q0 0
𝑣r 𝑣q 0
Findallvalues
𝐴 =1 10 1−1 1
⇒ 𝐴0𝐴 = 2 00 3 ⇒ 𝜆r, 𝜆q = 3,2 ∧ 𝑣r, 𝑣q = 0
1 , 10
∴ 𝑉0 = 0 1
1 0
𝑈 =13
1 10 1−1 1
01
12
1 10 1−1 1
10
𝑁𝑆 𝐴0
𝑁𝑆 𝐴0
𝑁𝑆 𝐴0 ⇒ 𝐴0𝑥 = 0 ⇒ 1 1 11 0 −1
00 ~ 1 0 −1
0 1 200 ⇒ 𝑥 = 𝑥o
1−21
, 𝑥o = 𝑓𝑟𝑒𝑒 = 1 ∴ 𝑢o
=1−21
𝑢o = 1 + 4 + 1 = 6

Copyright©WESOLVETHEMLLC|WeSolveThem.com 173
⇒ 𝑈 =
13
12
16
13
0 −26
13
−12
16
, ∴ 𝐴 =
13
12
16
13
0 −26
13
−12
16
3 00 20 0
0 11 0 =
1 10 1−1 1
SystemofdifferentialequationsNote: 𝑆𝐷𝑆pr Ö = 𝑆𝐷Ö𝑆pr(easytoprove,tryitoutwithk=1,2,3,4…hint𝑆𝑆pr = 𝐼)
𝑑𝑋𝑑𝑡 = 𝐴𝑋 ⇒ 𝑑𝑋 = 𝑋𝐴𝑑𝑡 ⇒
1𝑋 𝑑𝑥 = 𝐴𝑑𝑡 ⇒ ln 𝑋 = 𝐴𝑡 + 𝐶r ⇒ 𝑋 = 𝑒á:��© = 𝑒á:𝑒�© = 𝐶𝑒�©
∴ 𝑋 = 𝐶𝑒�© ⇒ 𝑋 = 𝐶𝐴Ö𝑡Ö
𝑘!
∞
Ö12
= 𝐶𝑆𝐷Ö𝑆pr𝑡Ö
𝑘!
∞
Ö12
= 𝐶𝑆𝐷Ö𝑡Ö
𝑘!
∞
Ö12
𝑆pr
𝑥rÞ = 3𝑥r + 𝑥q − 𝑥o𝑥qÞ = 𝑥r + 3𝑥q − 𝑥o𝑥oÞ = 3𝑥r + 3𝑥q − 𝑥o
⇒ 𝑋Þ =3 1 −11 3 −13 3 −1
𝑋 ⇒ 𝑋 = 𝐶3 1 −11 3 −13 3 −1
Ö𝑡Ö
𝑘!
∞
Ö12
Diagonlize𝐴,𝐴 =3 1 −11 3 −13 3 −1
⇒ " =1 1 −11 0 13 1 0
1 0 00 2 00 0 2
−1 −1 13 3 −21 2 −1
∴ 𝐶1 1 −11 0 13 1 0
1 0 00 2 00 0 2
−1 −1 13 3 −21 2 −1
Ö𝑡Ö
𝑘!
∞
Ö12
= 𝐶1 1 −11 0 13 1 0
1 0 00 2 00 0 2
Ö𝑡Ö
𝑘!
∞
Ö12
−1 −1 13 3 −21 2 −1
= 𝐶1 1 −11 0 13 1 0
1Ö𝑡Ö
𝑘!
∞
Ö12
0 0
02Ö𝑡Ö
𝑘!
∞
Ö12
0
0 02Ö𝑡Ö
𝑘!
∞
Ö12
−1 −1 13 3 −21 2 −1
= 𝑐r 𝑐q 𝑐o1 1 −11 0 13 1 0
𝑒 0 00 𝑒q 00 0 𝑒q
−1 −1 13 3 −21 2 −1

Copyright©WESOLVETHEMLLC|WeSolveThem.com174
Oruseaformula(easiestwiththreeeigenvectors)
𝑋 = 𝑐r𝑣r𝑒�: + 𝑐q𝑣q𝑒�� + 𝑐o𝑣o𝑒�Ó = 𝑐r113
𝑒 + 𝑐q101
𝑒q + 𝑐o−110
𝑒q
LinearProgramming:SimplexMethodSolvethelinearprogrammingproblembythesimplexmethod.Maximize𝑃 = 5𝑥 + 4𝑦subjectto3𝑥 + 5𝑦 ≤ 145and4𝑥 + 𝑦 ≤ 104and𝑥 ≥ 0and𝑦 ≥ 0SimplexTableau:(note:𝑃 = 5𝑥 + 4𝑦 ⇒ 𝑃 − 5𝑥 − 4𝑦 = 0)
𝑥 𝑦 𝑢 𝑣 𝑃 Constant3 5 1 0 0 1454 1 0 1 0 104−5 −4 0 0 1 0
1stSince−4 > −5thesecondcolumnisthepivotcolumn2ndPerformr
é𝑅1 ∧ − r
Ü𝑅3tomakecolumn2have1’s
𝑥 𝑦 𝑢 𝑣 𝑃 Constant35
1 15
0 0 29
4 1 0 1 0 10454
1 0 0 14
0
3rdWewantcolumntwotobeaunitcolumni.e. 0,1,0 perform𝑅2 − 𝑅1 ∧ 𝑅2 − 𝑅3
𝑥 𝑦 𝑢 𝑣 𝑃 Constant175
0 −15
1 0 75
4 1 0 1 0 104114
0 0 1 −14
104
4thRepeatforcolumn1{1,0,0}−q2
rë𝑅1 + 𝑅2 ∧ − é
rërrÜ𝑅1 + 𝑅3
𝑥 𝑦 𝑢 𝑣 𝑃 Constant175
0 −15
1 0 75
0 1 417 −
317
0 26817

Copyright©WESOLVETHEMLLC|WeSolveThem.com 175
0 0 1168
1368 −
14
−294768
5th é
rë𝑅1 ∧ −4𝑅3
𝑥 𝑦 𝑢 𝑣 𝑃 Constant1 0 −
117
1 0 37517
0 1 417 −
317
0 26817
0 0 −1117 −
1317
1 294717
Maximize𝑃 = 5𝑥 + 4𝑦subjectto3𝑥 + 5𝑦 ≤ 145and4𝑥 + 𝑦 ≤ 104and𝑥 ≥ 0and𝑦 ≥ 0
max 𝑃 =294717 ⇔ 𝑥, 𝑦 =
117 375,268
DIFFERENTIALEQUATIONSIntrotothefirst-orderdifferentialequation
𝑦Þ = 𝑥 ⇒ 𝑑𝑦𝑑𝑥 = 𝑥
Type:First-order-nonhomogeneouslineardifferentialequationSolutionMethod:SeparablevariableAnswer:Explicit-generalsolution
𝑑𝑦 = 𝑥𝑑𝑥
⇒ 𝑑𝑦 = 𝑥 𝑑𝑥𝑦
⇒ 𝑦 + 𝑐r =12 𝑥
q + 𝑐q
⇒ 𝑦 =12 𝑥
q + 𝑐q − 𝑐r, 𝐧𝐨𝐭𝐞:𝑐q − 𝑐r = 𝑐o = 𝐶
∴ 𝑦 =12 𝑥
q + 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com176
HomogeneousAdifferentialequationthathasafunctionofwhichdoescontainthevariablethatisbeingdifferentiated.
𝑦 0 +⋯𝑦0 +⋯ = 0
Example:
𝑦 é − 𝑦ÞÞ +𝑦Þ
𝑦 𝑥q − cos 𝑥𝑦 = 0
NonhomogeneousAdifferentialequationthathasafunctionofwhichdoesnotcontainthevariablethatisbeingdifferentiated.
𝑓��r𝑦 0 + ⋯𝑓� 𝑥 𝑦0 +⋯ = 𝑔 𝑥
Example:
𝑦 é − 𝑦ÞÞ +𝑦Þ
𝑦 𝑥q − cos 2𝑥 = 0
LinearAdifferentialequationthatcontainsonlyderivativesinthenumeratorstate,hasthehighestpowerofthevariablebeingdifferentiatedis1,andthedifferentiatedvariableisnotbeingoperatedon.
Example:
𝑦 0 + 𝑦 0pr + ⋯𝑦 = 0
𝑎0 𝑥 𝑦 0 + 𝑎0pr 𝑥 𝑦 0pr + ⋯ = 0
Non-linearAdifferentialequationwherethedifferentiatedvariableisalsobeingoperatedonbyfunctions.
Example:
𝑦ÞÞ +𝑦Þ
𝑦 𝑥q − cos 2𝑥 = 0,
1𝑦 = 𝑦pr
𝑦 é − 𝑦ÞÞ + 𝑦Þ𝑥q − cos 𝑥𝑦 = 0
𝑦𝑦Þ = 𝑥
Note:MakesuretounderstandhowthefollowingtermsrelatetoaDEi.e.thetypeofDEwilltellyouwhatmethodtouseinordertosolvetheDEType:Order–Linearity–HomogeneityProblem:
• Initial-ValueProblem(IVP)hasaParticularSolution• NON-IVPhasaGeneralSolution(Constant𝐶insolution)• ExplicitSolution:𝑦 = 𝑓 𝑥 • Implicitsolution:𝑦0 ⋯ = 𝑓 𝑥,…
Theorderofadifferentialequationisdependentuponthehighestderivativee.g.𝑦ÞÞÞ + 𝑦ÞÞ = 0isathird-orderdifferentialequation.Note:Donotconfuse𝑦0with𝑦(0)
• 𝑦(0)isthenthderivative• 𝑦0isthenthpower

Copyright©WESOLVETHEMLLC|WeSolveThem.com 177
e.g.𝑦Ü = 𝑦 ∙ 𝑦 ∙ 𝑦 ∙ 𝑦where𝑦(Ü) = »»�
»»�
»»�
»»�𝑦
Orderofderivativenotation:𝑌, 𝑦, 𝑦Þ, 𝑦ÞÞ, 𝑦ÞÞÞ, 𝑦 Ü , …𝑦 0 Respecttotime:𝑦, 𝑦, 𝑦 ≡ 𝑦Þ 𝑡 , 𝑦ÞÞ 𝑡 , 𝑦ÞÞÞ 𝑡 ≡ »¦
»©, »
�¦»©�
, »Ó¦»©Ó
Letslookatacoupleexamplesofequationsthatarelinearandnonlinear.
𝑦é + 𝑥𝑦ÞÞ − »�¦»��
= sin 𝑥𝑦 ,Sixth-Order-Nonlinearandhomogeneous𝑥𝑦ÞÞ − »�¦
»��= sin 𝑥 ,Sixth-Order-Linearandnonhomogeneous
𝑦′′+ 𝑦′+ 𝑦𝑥 = 0,Second-Order-Linearandhomogeneous𝑦ÞÞ + 𝑦𝑦Þ = ln 𝑥,Second-Order-NonlinearandnonhomogeneousNote:Althoughthepowerofyis1inthiscase,itisdependentupony’makingitnonlinear.𝑦′′′+ 𝑦q + 𝑥𝑒¦ = 0,Third-Order-Nonlinearandhomogeneous
1stOrderSolutionMethodsSeparableVariableScenarioTheseparablevariableequationisprettymuchjustanaverageintegrationproblemyoumayhaveencounteredincalculus.Theideaisthatyouhaveafirst-orderDEanditisintheformofafunctionof𝑥, 𝑦,and𝑓 𝑥, 𝑦 canbefoundinaDEe.g.𝑓 𝑥, 𝑦 𝑦Þ = 𝑝 𝑥 ,whichcanbeseparatedintotheform𝑔 𝑦 𝑑𝑦 = ℎ 𝑥 𝑑𝑥.Theseparablevariablecouldalsobeviewedas𝑦′ = 𝑓r 𝑦 𝑓q 𝑥 Ex.1(Explicitvs.Implicit)Given𝑓 𝑥, 𝑦 = 𝑥𝑦and𝑝 𝑥 = 𝑥qSolve𝑓 𝑥, 𝑦 𝑦Þ = 𝑝 𝑥 Type:First-Order-Nonlinear-Nonhomogeneous-ODEODE-OrdinaryDifferentialEquationPDE-PartialDifferentialEquationsSolutionMethod:SeparableVariable
𝑓 𝑥, 𝑦 𝑦Þ = 𝑝 𝑥
⇒ 𝑥𝑦𝑦Þ = 𝑥q
⇒ 𝑥𝑦𝑑𝑦𝑑𝑥 = 𝑥q
⇒ 𝑦𝑑𝑦 = 𝑥𝑑𝑥
⇒ 𝑦𝑑𝑦 = 𝑥𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com178
Answer:Implicit-GeneralSolution ⇒
𝑦q
2 + 𝑐r =𝑥q
2 + 𝑐q⇒ 𝑦q + 𝑐o = 𝑥q + 𝑐Ü
⇒ 𝑦q = 𝑥q + 𝑐Ü − 𝑐o = 𝑥q + 𝑐é
∴ 𝑦q = 𝑥q + 𝐶
Ex.2(SeparableVariable)SolvetheDE
𝑥𝑦Þ − 𝑥 = 2Type:first-order-linearnonhomogeneousdifferentialequationSolution:SeparableVariableAnswer:Explicit-GeneralSolution
𝑥𝑑𝑦𝑑𝑥 = 2 + 𝑥
⇒𝑑𝑦𝑑𝑥 =
2 + 𝑥𝑥
⇒ 𝑑𝑦 =2 + 𝑥𝑥 𝑑𝑥
⇒ 𝑑𝑦 =2 + 𝑥𝑥 𝑑𝑥
⇒ 𝑦 + 𝑐r = 2 ln 𝑥 + 𝑥 + 𝑐q
∴ 𝑦 = 2 ln |𝑥| + 𝑥 + 𝐶
Ex.3*(IVPProblem)GivetheimplicitsolutiontotheIVP:-𝑦𝑥pr = 𝑥Þ 𝑦 ; 𝑦 −3 = 4
−𝑦𝑥 =
𝑑𝑥𝑑𝑦 ⇒ 𝑦𝑑𝑦 = 𝑥𝑑𝑥 ⇒ 𝑦 𝑑𝑦 = − 𝑥 𝑑𝑥 ⇒
12 𝑦
q = −12𝑥
q + 𝑐q − 𝑐r
⇒ 𝑦q + 𝑥q = 2 𝑐q + 𝑐r = 𝐶
Solvingimplicitly
𝑦 = ± 𝐶 − 𝑥q
Letssolvethisimplicitlyfirst −3 q + 5 q = 25 = 𝐶so𝑥q + 𝑦q = 5qacirclecenteredattheoriginwithradius5.

Copyright©WESOLVETHEMLLC|WeSolveThem.com 179
Nowletstakealookatthisexplicitly
−3 =− 𝐶 − 4 q
+ 𝐶 − 5 q
Butwait!Because 𝑢 ≥ 0∀3∈ 𝑅 − 3 =1stOrderLinearNon-homogeneousi.e.y’+P(x)y=Q(x)ProcessGivenafirstorderlinearnon-homogeneousdifferentialequationoftheform𝑦Þ + 𝑃 𝑥 𝑦 = 𝑄 𝑥 thesolutionis:
𝑦 =1𝐼 𝑥 𝐼 𝑥 𝑄 𝑥 𝑑𝑥 + 𝐶 , 𝐼 𝑥 = 𝑒 Ù � »�
Ex.1
𝑑𝑦𝑑𝑥 +
9𝑥 𝑦 =
1𝑥ç
𝑃 𝑥 =9𝑥 , 𝑄 𝑥 =
1𝑥ç , 𝐼 𝑥 = 𝑒
è�»� = 𝑒è ®¯ � = 𝑒 ®¯ �� = 𝑥è
⇒ 𝑦 =1𝑥è 𝑥è ∙
1𝑥ç 𝑑𝑥 + 𝑐r =
1𝑥è 𝑥 𝑑𝑥 + 𝑐r =
1𝑥è
12 𝑥
q + 𝑐r =1𝑥è
𝑥q + 2 ∙ 𝑐r2
=𝑥q + 𝐶2𝑥è
Ex.2
𝑦 ∙ sin 𝑥 𝑑𝑦 − yq ∙ csc 𝑥 𝑑𝑥 = 𝑦 ∙ csc 𝑥 𝑑𝑥
TherearemanyformsDE’scantakeonandmanysolutionstothem,someareeasierthanotherssotheonlytruewaytounderstandwhentousewhatistoexposeyourselftomanysituations.
𝑦pr csc 𝑥1𝑑𝑥 𝑦 ∙ sin 𝑥 𝑑𝑦 − yq ∙ csc 𝑥 𝑑𝑥 = 𝑦 ∙ csc 𝑥 𝑑𝑥 ⇒
𝑑𝑦𝑑𝑥 − csc
q 𝑥 𝑦 = cscq 𝑥
∴ 𝑃 𝑥 = −cscq 𝑥 , 𝑄 𝑥 = sec 𝑥 , 𝐼 𝑥 = 𝑒 p j/j� � »� = 𝑒jk- �
𝑦 =1
𝑒jk- �𝑒jk- � ∙ cscq 𝑥 𝑑𝑥 + 𝐶 = 𝑒p jk- � −𝑒jk- � + 𝐶 = −1 + 𝐶𝑒p jk- �
∴ 𝑦 𝑥 = 𝐶𝑒p jk- � − 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com180
ExactDifferentialEquationTheexactequationisnotverycommonandstemsfrompartialderivatives.Thesolutionisgenerallyverysimple.Situation
𝑓� 𝑥, 𝑦 𝑑𝑥 + 𝑓¦ 𝑥, 𝑦 𝑑𝑦 = 0 ⇔ 𝜕𝜕𝑦 𝑓� =
𝜕𝜕𝑥 𝑓¦
Thisimpliesthatthereisacommonfunctionℎ 𝑥, 𝑦 ineachindividualantiderivativeEx.1
𝑥q − 𝑦q 𝑑𝑥 + 𝑦q − 2𝑥𝑦 𝑑𝑦 = 0
𝑓� = 𝑥q − 𝑦q ⇒ 𝜕𝜕𝑦 𝑓� = −2𝑦
𝑓¦ = 𝑦q − 2𝑥𝑦 ⇒ 𝜕𝜕𝑥 𝑓¦ = −2𝑦
∴ 𝜕𝜕𝑦 𝑓� = −2𝑦 =
𝜕𝜕𝑥 𝑓¦
SothisisanexactequationAllyouhavetodoisintegrateandfindthecommontermandrecallfromseveralvariablecalculusthatweareintegratingamultiplevariablefunctionthattheconstantaddedisafunctionofthevariablenotbeingintegratedi.e.
𝑥q − 𝑦q 𝑑𝑥 = 0 ⇒ 13 𝑥
o − 𝑥𝑦q + 𝑘 𝑦 = 𝑐r
𝑦q − 2𝑥𝑦 𝑑𝑦 = 0 ⇒ 13 𝑦
o − 𝑥𝑦q + 𝑙 𝑥 = 𝑐q
Fromthiswecaneasilyidentify𝑘 𝑦 and𝑙 𝑥 oritmayjustbeeasytoseethesimilarityi.e.thinkabouttakingpartialderivativesof𝑓 𝑥, 𝑦 = r
o𝑥o − 𝑥𝑦q + r
o𝑦o
𝑘 𝑦 =13𝑦
o, 𝑙 𝑥 =13 𝑥
o, 𝑐𝑜𝑚𝑚𝑜𝑛𝑡𝑒𝑟𝑚 = −𝑥𝑦q
∴ 𝑓 𝑥, 𝑦 = 13 𝑥
o − 𝑥𝑦q +13𝑦
o = 𝐶

Copyright©WESOLVETHEMLLC|WeSolveThem.com 181
Thereareotherapproachestothis;infactyoucouldsolvethisinonstraightshotbyjustintegratingthewholeequationandidentifyingthecommontermbutcheckwithyourteacherhowmuchdetailtheywouldprefer.Note:Thisproblemisnotlikelytoshowuponexams(maybeaquiz)becauseitissuchararecaseandisreallyverysimpletosolve.Yourexamswillmostlikelyhaveallsecondorderorhigherdifferentialequations.General,ParticularandSuperpositionSolutionsFordifferentialequationsofhigherorderthan1,therewillbemultiplesolutionsi.e.𝑦r, 𝑦q, … , 𝑦0whereeachindividualyandallthey’stogetheraresolutionstotheDE.GeneralSolutionThegeneralsolutioncontainsaconstante.g.𝑦 = 𝑥 + 𝐶𝑒/ó¯ � ParticularSolution Theparticularsolutioncontainsnoconstants,usuallyduetoaninitialvalueoraspartofanon-homogeneoussolution.SuperpositionSolutionForDE’swithmultiplesolutions,thesumofthesolutionsisalsoasolutioni.e.𝑦 = 𝑐r𝑦r + 𝑐q𝑦q +⋯+ 𝑐0𝑦0andinanon-homogeneoussituationthesolutionwillbethesumofthesolutiontothehomogenouspartoftheequationandthenon-homogenouspartgenerallynotedas𝑦 = 𝑦� + 𝑦Ù.Thegeneralsolutionisgenerallynotedas𝑦� andtheparticular𝑦Ùgivingthesolutiontobe𝑦 =𝑦� + 𝑦Ù
𝑦 = (𝑐r𝑦�,r + 𝑐q𝑦�,q + ⋯+ 𝑐0𝑦�,0) + (𝑦Ù,r + 𝑦Ù,q + ⋯+ 𝑦Ù,0)
LinearHomogenouswithConstantCoefficientsScenario
𝑎r𝑦 0 + ⋯+ 𝑎q𝑦 0pÖ + ⋯+ 𝑎�𝑦 = 0
AuxiliaryequationSubstitute𝑦 = 𝑒Ô©intotheequation,eliminate𝑒Ô©andsolveforr
𝑎r𝑟0 + ⋯+ 𝑎q𝑟 0pÖ + ⋯+ 𝑎� = 0
Solution(s)

Copyright©WESOLVETHEMLLC|WeSolveThem.com182
If𝑟hasapairofsolutions
𝑦� = 𝑐r𝑒Ô:© + 𝑐q𝑒Ô�©
If𝑟hasnrepeatingsolutions
𝑦� = 𝑐r𝑒Ô© + 𝑐q𝑡𝑒Ô© + 𝑐o𝑡q𝑒Ô© + ⋯+ 𝑐0𝑡0pr𝑒Ô©
If𝑟hasapairofcomplexsolutions
𝑟 = 𝛼 ± 𝑖𝛽, 𝑦 = 𝑒�© cos 𝛽𝑡 + 𝑒�© sin 𝛽𝑡
GenerallySpeaking
𝑎𝑦ÞÞ + 𝑏𝑦 + 𝑐𝑦 = 0, 𝑦 = 𝑒��, 𝑦Þ = 𝑚𝑒��, 𝑦ÞÞ = 𝑚q𝑒��
⇒ 𝑎 𝑚q𝑒�� + 𝑏 𝑚𝑒�� + 𝑐 𝑒�� = 𝑒�� 𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0
Identify𝑒�� > 0soithasnopurposeforoursolutionleaving𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0,whichistheauxiliaryequationandthequadraticequationmaybeusedtosolveit.
𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0, 𝑚 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎
Two-real𝑏q − 4𝑎𝑐 > 0
𝑦 = 𝑐r𝑒�:� + 𝑐q𝑒���
Repeated𝑏q − 4𝑎𝑐 = 0
𝑦 = 𝑐r𝑒�� + 𝑐q𝑥𝑒��
Complexi.e.𝑏q − 4𝑎𝑐 < 0 ⇒ 𝑥 = 𝛼 ± 𝑖𝛽
𝑦 = 𝑒�� 𝑐r cos 𝛽𝑥 + 𝑐q sin 𝛽𝑥
Ex.1
3𝑦ÞÞ + 4𝑦Þ + 5𝑦 = 0
Extractauxiliaryequationi.e.3𝑟q + 4𝑟 + 5 = 0,solvefor𝑟
𝑟 =−4 ± 16 − 4 ∙ 3 ∙ 5
2 ∙ 3 = −46 ±
−446 = −
23 ± 𝑖
26 11 = −
23 ± 𝑖
13 11
𝛼 = −23 , 𝛽 =
113

Copyright©WESOLVETHEMLLC|WeSolveThem.com 183
∴ 𝑦 = 𝑒 pqo © 𝑐r cos113 𝑡 + 𝑐q sin
113 𝑡
Theothertwoareeasytosolvewiththegivenformulas.WhatwearereallyinterestedinnowishowtousethegivenformulasforhigherorderDE’s.Ex.2
3𝑦ÞÞÞ + 4𝑦Þ = 0
Theauxiliaryequationis3𝑟o + 0 ∙ 𝑟q + 4𝑟 + 0 = 3𝑟o + 4𝑟 = 0
3𝑟o + 4𝑟 = 0 ⇒ 𝑟 3𝑟q + 4 = 0 ⇒ 𝑟 = 0&𝑟 = 0 ± 𝑖23
Wenowhave3solutionsi.e.𝑦 = 𝑐r𝑦r + 𝑐q𝑦q + 𝑐o𝑦oThecomplexscenarioshouldbeprettyobviousjustplugitintotheformula
𝑐r𝑦r + 𝑐q𝑦q = 𝑒2∙© 𝑐r cos23𝑡 + 𝑐q sin
23𝑡 = 𝑐r cos
23𝑡 + 𝑐q sin
23𝑡
Whataboutthesolution0?0isrepeatedoncehence
𝑐o𝑦o = 𝑐o𝑒2∙© = 𝑐o 1 = 𝑐o
∴ 𝑦 = 𝑐r cos23𝑡 + 𝑐q sin
23𝑡 + 𝑐o
Ex.3
𝑦ÞÞÞ + 8𝑦 = 0
𝑥o + 𝑎o = 𝑥 + 𝑎 𝑥q − 𝑎𝑥 + 𝑎q
𝑟o + 8 = 0 ⇒ 𝑟 + 2 𝑟q − 2𝑟 + 4 = 0 ⇒ 𝑟 = −2, 1 ± 𝑖 3
𝑦r,q = 𝑒© 𝑐r cos 3𝑡 + 𝑐q sin 3𝑡 , 𝑦o = 𝑐o𝑒pq©
∴ 𝑦 = 𝑒© 𝑐r cos 3𝑡 + 𝑐q sin 3𝑡 + 𝑐o𝑒pq©
Ex.4
𝑦 Ü + 8𝑦ÞÞÞ = 0 ⇒ 𝑟Ü + 8𝑟o = 𝑟o 𝑟 + 8 = 0 ⇒ 𝑟o = 0, 𝑟 = −8
Zeroisrepeatedthreetimeshere

Copyright©WESOLVETHEMLLC|WeSolveThem.com184
𝑦r,q,o = 𝑐r𝑒2∙� + 𝑐q𝑥𝑒2∙� + 𝑐o𝑥q𝑒2∙� = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q, 𝑦Ü = 𝑐Ü𝑒pç�
∴ 𝑦 = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q + 𝑐Ü𝑒pç�
Ex.5IVPy(0)=1,y’(0)=2,y’’(0)=3,y’’’(0)=4Usingthesolutionfromexample4
𝑦� = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q + 𝑐Ü𝑒pç�
𝑦Þ = 𝑐q + 2𝑐o𝑥 − 8𝑐Ü𝑒pç�, 𝑦ÞÞ = 2𝑐o + 64𝑐Ü𝑒pç�, 𝑦ÞÞÞ = −512𝑐Ü𝑒pç�
𝑦 0 = 1 ⇒ 1 = 𝑐r + 𝑐q ∙ 0 + 𝑐o ∙ 0 + 𝑐Ü𝑒2 = 𝑐r + 𝑐Ü
𝑦Þ 0 = 2 ⇒ 2 = 𝑐q + 2𝑐o ∙ 0 − 8𝑐Ü𝑒2 = 𝑐q − 8𝑐Ü
𝑦ÞÞ 0 = 3 ⇒ 3 = 2𝑐o + 64𝑐Ü𝑒2 = 2𝑐o + 64𝑐Ü
𝑦ÞÞÞ 0 = 4 ⇒ 4 = −512𝑐Ü𝑒2 = −512𝑐Ü
Solvethesystem
𝑐r + 𝑐Ü = 1, 𝑐q − 8𝑐Ü = 2, 2𝑐o + 64𝑐Ü = 3, −512𝑐Ü = 4
𝑐r =129128 , 𝑐q =
3116 , 𝑐o =
74 , 𝑐Ü = −
1128
∴ 𝑦Ù =129128 +
3116 𝑥 +
74 𝑥
q −1128 𝑒
pç�
ReductionofOrderProcessGivenasecondorderlinearhomogeneousDEoftheform𝑦ÞÞ + 𝑃 𝑥 𝑦Þ + 𝑄 𝑥 = 0accompaniedwith𝑦r(𝑥)SolutionSincethefirstsolutionisgiven,youmustfindthesecondsolution,whichis:
𝑦q 𝑥 = 𝑦r 𝑥𝑒p à � »�
𝑦r 𝑥 q 𝑑𝑥, ∴ 𝑦 = 𝑐r𝑦r + 𝑐q 𝑦r 𝑥𝑒p à � »�
𝑦r 𝑥 q 𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 185
Ex.1
𝑥q𝑦ÞÞ + 2𝑥𝑦Þ − 6𝑦 = 0, 𝑦r = 𝑥q
Find𝑃 𝑥
1𝑥q 𝑥q𝑦ÞÞ + 2𝑥𝑦Þ − 6𝑦 = 0 ⇒ 𝑦ÞÞ +
2𝑥 𝑦
Þ −6𝑥q 𝑦 = 0 ⇒ 𝑃 𝑥 =
2𝑥
∴ 𝑦q = 𝑥q𝑒p
q�»�
𝑥q q 𝑑𝑥 = 𝑥q𝑒pq ®¯ �
𝑥Ü 𝑑𝑥 = 𝑥q𝑒®¯ �ü�
𝑥Ü 𝑑𝑥 = 𝑥q𝑥pq
𝑥Ü 𝑑𝑥 = 𝑥q 𝑥pê 𝑑𝑥
= 𝑥q1−5𝑥
pé = −15𝑥
po ⇒ 𝑦q =1𝑥o
Theconstantcanbeignoredbecauseaconstanttimesaconstantisaconstant
∴ 𝑦 = 𝑐r𝑥q +
𝑐q𝑥o
Atthispointitshouldbecomeobviousthat𝑐r + 𝑐q + ⋯+ 𝑐0 = 𝐶,thisisalsotruefornumbersi.e.𝑐r + 5 + 𝑒 + ln 10 + 𝑒�Ó + 6𝑐q = 𝐶.Inotherwords:aconstantwithaconstantisaconstant.SubstitutionGeneralSituationThemethodofsubstationworkswellwithDE’sthatlooksimilartoanexactequationi.e.
𝑥q + 4𝑥𝑦 𝑑𝑥 + 𝑦q − 4𝑥q 𝑑𝑦 = 0Wecancheckforanexactandseethat𝜕¦𝑓� = 4𝑥 ≠ −8𝑥 = 𝜕�𝑓¦soweknowwecannotusethatmethodbecausetheyarenotequal.SubstitutionSolutionMethodSet𝑦 = 𝑣 𝑥 ∙ 𝑥andtakethederivativei.e.𝑦Þ = 𝑣 𝑥 + 𝑥 ∙ 𝑣Þ 𝑥 andsolvefor𝑑𝑦.
𝑑𝑦𝑑𝑥 = 𝑣 + 𝑥 ∙
𝑑𝑣𝑑𝑥 ⇒ 𝑑𝑥
𝑑𝑦𝑑𝑥 = 𝑣 + 𝑥 ∙
𝑑𝑣𝑑𝑥 ⇒ 𝑑𝑦 = 𝑣𝑑𝑥 + 𝑥𝑑𝑣
Ifyouusethismethodanditgetsreallysloppy,itprobablyisnotthebestchoicesotrysomethingelse;letsseehowthisDEplaysout.Substitute𝑦and𝑑𝑦andsimplifyi.e.
𝑥q + 4𝑥 𝑣𝑥 𝑑𝑥 + 𝑣𝑥 q − 4𝑥q 𝑣𝑑𝑥 + 𝑥𝑑𝑣 = 0

Copyright©WESOLVETHEMLLC|WeSolveThem.com186
⇒ 𝑥q𝑑𝑥 + 4𝑥q𝑣𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥q𝑣𝑑𝑥 − 4𝑥o𝑑𝑣 = 0
⇒ 𝑥q𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 4𝑥q𝑣𝑑𝑥 − 4𝑥q𝑣𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥o𝑑𝑣 = 0
⇒1𝑥q 𝑥q𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥o𝑑𝑣 = 0
⇒ 𝑑𝑥 + 𝑣o𝑑𝑥 + 𝑥𝑣q𝑑𝑣 − 4𝑥𝑑𝑣 = 0
⇒ 1 + 𝑣o 𝑑𝑥 + 𝑥 𝑣q − 4 𝑑𝑣 = 0 ⇒ 𝑥 𝑣q − 4 𝑑𝑣 = − 1 + 𝑣o 𝑑𝑥
⇒𝑣q − 41 + 𝑣o 𝑑𝑣 = −
1𝑥 𝑑𝑥
Nowintegratetheseparablevariabledifferentialequation.
𝑣q
1 + 𝑣o −4
1 + 𝑣o 𝑑𝑣 = −1𝑥 𝑑𝑥
Atthispoint,itisjustareallytediouscalculusproblem. 𝑣 = ¦
�Twooftheintegralsaresimplei.e.
13 ln 1 + 𝑣
o − 41
1 + 𝑣o 𝑑𝑣 = − ln 𝑥 + 𝐶 ⇒ 13 ln 1 +
𝑦𝑥
o− 4
11 + 𝑣o 𝑑𝑣 = − ln 𝑥 + 𝐶
Wejustneedtointegrate rr�4Ó
.Thisisaverycomplicatedintegraltodobyhand.IusedWolfram|Alphatocompletethis.
∴1
1 + 𝑣o =16 − ln 𝑣q − 𝑣 + 1 + 2 ln 𝑣 + 1 + 2 3 tanpr
2𝑣 − 13
⇒13 ln 1 +
𝑦𝑥
o− 4
16 − ln 𝑣q − 𝑣 + 1 + 2 ln 𝑣 + 1 + 2 3 tanpr
2𝑣 − 13
= − ln 𝑥 + 𝐶
⇒13 ln 1 +
𝑦𝑥
o− 4
16 − ln
𝑦𝑥
q−𝑦𝑥 + 1 + 2 ln
𝑦𝑥 + 1 + 2 3 tanpr
2 𝑦𝑥 − 1
3
= − ln 𝑥 + 𝐶Thiswasaveryloadedsituation;itishighlyunlikelytoseesomethinglikethisinanundergraduateDEcourse.Whentousethismethod?Ifyouhaveasituationwithafirst-orderdifferentialequationthatisnotlinearandtheexactequationmethoddoesnotworkoristwocomplicatedandviceversa.

Copyright©WESOLVETHEMLLC|WeSolveThem.com 187
IntegratingFactorsWhenyouhavethe“exactequation”lookingsituationbutitisnotanexactequationi.e.
𝑀𝑑𝑥 + 𝑁𝑑𝑦 = 0&𝜕𝑀𝜕𝑦 ≠
𝜕𝑁𝜕𝑥
Thenyoucanmultiplythewholeequationby𝜇 𝑥 or𝜇 𝑦 anditwillthenbecomeanexactequation.
𝜇 𝑥 = 𝑒� p�!
� »�, 𝜇 𝑦 = 𝑒�!p� � »¦
Ex.1
𝑥𝑦 𝑑𝑥 + 2𝑥q + 3𝑦q − 20 𝑑𝑦 = 0
𝑀 = 𝑥𝑦, 𝑁 = 2𝑥q + 3𝑦q − 20
𝜕𝑀𝜕𝑦 = 𝑥 ≠ 4𝑥 =
𝜕𝑁𝜕𝑥 ,
𝑀¦ − 𝑁�𝑁 =
−3𝑥2𝑥q + 3𝑦q − 20 ,
𝑁� −𝑀¦
𝑀 =3𝑥𝑥𝑦 =
3𝑦
Wearelookingfortheonethathasasinglevariableandalsoeasiesttointegrate.
∴ 𝜇 𝑦 = 𝑒o¦»¦ = 𝑒o ®¯ ¦ = 𝑒®¯ ¦Ó = 𝑦o
Nowmultiplytheoriginalequationby𝑦o
𝑦o ∙ 𝑥𝑦 𝑑𝑥 + 2𝑥q + 3𝑦q − 20 𝑑𝑦 = 0 ⇒ 𝑥𝑦Ü 𝑑𝑥 + 2𝑥q𝑦o + 3𝑦é − 20𝑦o 𝑑𝑦 = 0
∴ 𝜕𝜕𝑦 𝑥𝑦Ü = 4𝑥𝑦Üpr = 4𝑥𝑦o ⇒ 4𝑥𝑦o = 2 2𝑥𝑦o =
𝜕𝜕𝑥 2𝑥q𝑦o + 3𝑦é − 20𝑦o ⇔
𝜕𝑀𝜕𝑦
=𝜕𝑁𝜕𝑥
Thus,itisanexactequationnow.Integrateallthewaythroughandidentifytheequivalenttermi.e.
𝑥𝑦Ü 𝑑𝑥 = 𝑐r ⇒ 12 𝑥
q𝑦Ü + 𝑔 𝑦 = 𝑐r

Copyright©WESOLVETHEMLLC|WeSolveThem.com188
2𝑥q𝑦o + 3𝑦é − 20𝑦o 𝑑𝑦 = 𝑐q ⇒ 12 𝑥
q𝑦Ü +12𝑦
ê − 5𝑦Ü + ℎ 𝑥 = 𝑐r
Settingthesetwoequationsequal(therearemanywaystofindthisbytheway,thisisjustonemethod,seeexactequations)finding𝑔 𝑦 andℎ 𝑥
12 𝑥
q𝑦Ü +12𝑦
ê − 5𝑦Ü + ℎ 𝑥 =12𝑥
q𝑦Ü + 𝑔 𝑦 + 0
⇒12 𝑥
q𝑦Ü =12 𝑥
q𝑦Ü = 𝑓 𝑥, 𝑦 , 𝑔 𝑦 =12𝑦
ê − 5𝑦Ü , ℎ 𝑥 = 0, 𝑐r + 𝑐q = 𝐶
𝑓 𝑥, 𝑦 + 𝑔 𝑦 + ℎ 𝑥 = 𝐶 ∴ 12 𝑥
q𝑦Ü +12𝑦
ê − 5𝑦Ü = 𝐶
SECONDORDERDIFFERENTIALEQUATIONSLinearHomogenouswithConstantCoefficientsScenario
𝑎r𝑦 0 + ⋯+ 𝑎q𝑦 0pÖ + ⋯+ 𝑎�𝑦 = 0AuxiliaryequationSubstitute𝑦 = 𝑒Ô©intotheequation,eliminate𝑒Ô©andsolveforr
𝑎r𝑟0 + ⋯+ 𝑎q𝑟 0pÖ + ⋯+ 𝑎� = 0Solution(s)If𝑟hasapairofsolutions
𝑦� = 𝑐r𝑒Ô:© + 𝑐q𝑒Ô�©If𝑟hasnrepeatingsolutions
𝑦� = 𝑐r𝑒Ô© + 𝑐q𝑡𝑒Ô© + 𝑐o𝑡q𝑒Ô© + ⋯+ 𝑐0𝑡0pr𝑒Ô©If𝑟hasapairofcomplexsolutions
𝑟 = 𝛼 ± 𝑖𝛽, 𝑦 = 𝑒�©𝑐r cos 𝛽𝑡 + 𝑒�©𝑐q sin 𝛽𝑡 GenerallySpeaking

Copyright©WESOLVETHEMLLC|WeSolveThem.com 189
𝑎𝑦ÞÞ + 𝑏𝑦 + 𝑐𝑦 = 0, 𝑦 = 𝑒��, 𝑦Þ = 𝑚𝑒��, 𝑦ÞÞ = 𝑚q𝑒��
⇒ 𝑎 𝑚q𝑒�� + 𝑏 𝑚𝑒�� + 𝑐 𝑒�� = 𝑒�� 𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0
Identify𝑒�� > 0soithasnopurposeforoursolutionleaving𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0,whichistheauxiliaryequationandthequadraticequationmaybeusedtosolveit.
𝑎𝑚q + 𝑏𝑚 + 𝑐 = 0, 𝑚 =−𝑏 ± 𝑏q − 4𝑎𝑐
2𝑎 Two-real𝑏q − 4𝑎𝑐 > 0
𝑦 = 𝑐r𝑒�:� + 𝑐q𝑒���Repeated𝑏q − 4𝑎𝑐 = 0
𝑦 = 𝑐r𝑒�� + 𝑐q𝑥𝑒��Complexi.e.𝑏q − 4𝑎𝑐 < 0 ⇒ 𝑥 = 𝛼 ± 𝑖𝛽
𝑦 = 𝑒�� 𝑐r cos 𝛽𝑥 + 𝑐q sin 𝛽𝑥 Ex.1
3𝑦ÞÞ + 4𝑦Þ + 5𝑦 = 0Extractauxiliaryequationi.e.3𝑟q + 4𝑟 + 5 = 0,solvefor𝑟
𝑟 =−4 ± 16 − 4 ∙ 3 ∙ 5
2 ∙ 3 = −46 ±
−446 = −
23 ± 𝑖
26 11 = −
23 ± 𝑖
13 11
𝛼 = −23 , 𝛽 =
113
∴ 𝑦 = 𝑒 pqo © 𝑐r cos113 𝑡 + 𝑐q sin
113 𝑡
Theothertwoareeasytosolvewiththegivenformulas.WhatwearereallyinterestedinnowishowtousethegivenformulasforhigherorderDE’s.Ex.2
3𝑦ÞÞÞ + 4𝑦Þ = 0Theauxiliaryequationis3𝑟o + 0 ∙ 𝑟q + 4𝑟 + 0 = 3𝑟o + 4𝑟 = 0

Copyright©WESOLVETHEMLLC|WeSolveThem.com190
3𝑟o + 4𝑟 = 0 ⇒ 𝑟 3𝑟q + 4 = 0 ⇒ 𝑟 = 0&𝑟 = 0 ± 𝑖23
Wenowhave3solutionsi.e.𝑦 = 𝑐r𝑦r + 𝑐q𝑦q + 𝑐o𝑦oThecomplexscenarioshouldbeprettyobviousjustplugitintotheformula
𝑐r𝑦r + 𝑐q𝑦q = 𝑒2∙© 𝑐r cos23𝑡 + 𝑐q sin
23𝑡 = 𝑐r cos
23𝑡 + 𝑐q sin
23𝑡
Whataboutthesolution0?0isrepeatedoncehence
𝑐o𝑦o = 𝑐o𝑒2∙© = 𝑐o 1 = 𝑐o
∴ 𝑦 = 𝑐r cos23𝑡 + 𝑐q sin
23𝑡 + 𝑐o
Ex.3
𝑦ÞÞÞ + 8𝑦 = 0
𝑥o + 𝑎o = 𝑥 + 𝑎 𝑥q − 𝑎𝑥 + 𝑎q
𝑟o + 8 = 0 ⇒ 𝑟 + 2 𝑟q − 2𝑟 + 4 = 0 ⇒ 𝑟 = −2, 1 ± 𝑖 3
𝑦r,q = 𝑒© 𝑐r cos 3𝑡 + 𝑐q sin 3𝑡 , 𝑦o = 𝑐o𝑒pq©
∴ 𝑦 = 𝑒© 𝑐r cos 3𝑡 + 𝑐q sin 3𝑡 + 𝑐o𝑒pq©Ex.4
𝑦 Ü + 8𝑦ÞÞÞ = 0 ⇒ 𝑟Ü + 8𝑟o = 𝑟o 𝑟 + 8 = 0 ⇒ 𝑟o = 0, 𝑟 = −8Zeroisrepeatedthreetimeshere
𝑦r,q,o = 𝑐r𝑒2∙� + 𝑐q𝑥𝑒2∙� + 𝑐o𝑥q𝑒2∙� = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q, 𝑦Ü = 𝑐Ü𝑒pç�
∴ 𝑦 = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q + 𝑐Ü𝑒pç�Ex.5IVPy(0)=1,y’(0)=2,y’’(0)=3,y’’’(0)=4Usingthesolutionfromexample4

Copyright©WESOLVETHEMLLC|WeSolveThem.com 191
𝑦� = 𝑐r + 𝑐q𝑥 + 𝑐o𝑥q + 𝑐Ü𝑒pç�
𝑦Þ = 𝑐q + 2𝑐o𝑥 − 8𝑐Ü𝑒pç�, 𝑦ÞÞ = 2𝑐o + 64𝑐Ü𝑒pç�, 𝑦ÞÞÞ = −512𝑐Ü𝑒pç�
𝑦 0 = 1 ⇒ 1 = 𝑐r + 𝑐q ∙ 0 + 𝑐o ∙ 0 + 𝑐Ü𝑒2 = 𝑐r + 𝑐Ü
𝑦Þ 0 = 2 ⇒ 2 = 𝑐q + 2𝑐o ∙ 0 − 8𝑐Ü𝑒2 = 𝑐q − 8𝑐Ü
𝑦ÞÞ 0 = 3 ⇒ 3 = 2𝑐o + 64𝑐Ü𝑒2 = 2𝑐o + 64𝑐Ü
𝑦ÞÞÞ 0 = 4 ⇒ 4 = −512𝑐Ü𝑒2 = −512𝑐Ü
Solvethesystem
𝑐r + 𝑐Ü = 1, 𝑐q − 8𝑐Ü = 2, 2𝑐o + 64𝑐Ü = 3, −512𝑐Ü = 4
𝑐r =129128 , 𝑐q =
3116 , 𝑐o =
74 , 𝑐Ü = −
1128
∴ 𝑦Ù =129128 +
3116 𝑥 +
74 𝑥
q −1128 𝑒
pç�ReductionofOrderProcessGivenasecondorderlinearhomogeneousDEoftheform𝑦ÞÞ + 𝑃 𝑥 𝑦Þ + 𝑄 𝑥 = 0accompaniedwith𝑦r(𝑥)SolutionSincethefirstsolutionisgiven,youmustfindthesecondsolution,whichis:
𝑦q 𝑥 = 𝑦r 𝑥𝑒p à � »�
𝑦r 𝑥 q 𝑑𝑥, ∴ 𝑦 = 𝑐r𝑦r + 𝑐q 𝑦r 𝑥𝑒p à � »�
𝑦r 𝑥 q 𝑑𝑥
Ex.1
𝑥q𝑦ÞÞ + 2𝑥𝑦Þ − 6𝑦 = 0, 𝑦r = 𝑥qFind𝑃 𝑥
1𝑥q 𝑥q𝑦ÞÞ + 2𝑥𝑦Þ − 6𝑦 = 0 ⇒ 𝑦ÞÞ +
2𝑥 𝑦
Þ −6𝑥q 𝑦 = 0 ⇒ 𝑃 𝑥 =
2𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com192
∴ 𝑦q = 𝑥q𝑒p
q�»�
𝑥q q 𝑑𝑥 = 𝑥q𝑒pq ®¯ �
𝑥Ü 𝑑𝑥 = 𝑥q𝑒®¯ �ü�
𝑥Ü 𝑑𝑥 = 𝑥q𝑥pq
𝑥Ü 𝑑𝑥 = 𝑥q 𝑥pê 𝑑𝑥
= 𝑥q1−5𝑥
pé = −15𝑥
po ⇒ 𝑦q =1𝑥o
Theconstantcanbeignoredbecauseaconstanttimesaconstantisaconstant
∴ 𝑦 = 𝑐r𝑥q +𝑐q𝑥o
Atthispointitshouldbecomeobviousthat𝑐r + 𝑐q + ⋯+ 𝑐0 = 𝐶,thisisalsotruefornumbersi.e.𝑐r + 5 + 𝑒 + ln 10 + 𝑒�Ó + 6𝑐q = 𝐶.Inotherwords:aconstantwithaconstantisaconstant.SubstitutionGeneralSituationThemethodofsubstationworkswellwithDE’sthatlooksimilartoanexactequationi.e.
𝑥q + 4𝑥𝑦 𝑑𝑥 + 𝑦q − 4𝑥q 𝑑𝑦 = 0Wecancheckforanexactandseethat𝜕¦𝑓� = 4𝑥 ≠ −8𝑥 = 𝜕�𝑓¦soweknowwecannotusethatmethodbecausetheyarenotequal.SubstitutionSolutionMethodSet𝑦 = 𝑣 𝑥 ∙ 𝑥andtakethederivativei.e.𝑦Þ = 𝑣 𝑥 + 𝑥 ∙ 𝑣Þ 𝑥 andsolvefor𝑑𝑦.
𝑑𝑦𝑑𝑥 = 𝑣 + 𝑥 ∙
𝑑𝑣𝑑𝑥 ⇒ 𝑑𝑥
𝑑𝑦𝑑𝑥 = 𝑣 + 𝑥 ∙
𝑑𝑣𝑑𝑥 ⇒ 𝑑𝑦 = 𝑣𝑑𝑥 + 𝑥𝑑𝑣
Ifyouusethismethodanditgetsreallysloppy,itprobablyisnotthebestchoicesotrysomethingelse;letsseehowthisDEplaysout.Substitute𝑦and𝑑𝑦andsimplifyi.e.
𝑥q + 4𝑥 𝑣𝑥 𝑑𝑥 + 𝑣𝑥 q − 4𝑥q 𝑣𝑑𝑥 + 𝑥𝑑𝑣 = 0
⇒ 𝑥q𝑑𝑥 + 4𝑥q𝑣𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥q𝑣𝑑𝑥 − 4𝑥o𝑑𝑣 = 0
⇒ 𝑥q𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 4𝑥q𝑣𝑑𝑥 − 4𝑥q𝑣𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥o𝑑𝑣 = 0
⇒1𝑥q 𝑥q𝑑𝑥 + 𝑥q𝑣o𝑑𝑥 + 𝑥o𝑣q𝑑𝑣 − 4𝑥o𝑑𝑣 = 0
⇒ 𝑑𝑥 + 𝑣o𝑑𝑥 + 𝑥𝑣q𝑑𝑣 − 4𝑥𝑑𝑣 = 0
⇒ 1 + 𝑣o 𝑑𝑥 + 𝑥 𝑣q − 4 𝑑𝑣 = 0 ⇒ 𝑥 𝑣q − 4 𝑑𝑣 = − 1 + 𝑣o 𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com 193
⇒𝑣q − 41 + 𝑣o 𝑑𝑣 = −
1𝑥 𝑑𝑥
Nowintegratetheseparablevariabledifferentialequation.
𝑣q
1 + 𝑣o −4
1 + 𝑣o 𝑑𝑣 = −1𝑥 𝑑𝑥
Atthispoint,itisjustareallytediouscalculusproblem. 𝑣 = ¦
�Twooftheintegralsaresimplei.e.
13 ln 1 + 𝑣
o − 41
1 + 𝑣o 𝑑𝑣 = − ln 𝑥 + 𝐶 ⇒ 13 ln 1 +
𝑦𝑥
o− 4
11 + 𝑣o 𝑑𝑣 = − ln 𝑥 + 𝐶
Wejustneedtointegrate rr�4Ó
.Thisisaverycomplicatedintegraltodobyhand.IusedWolfram|Alphatocompletethis.
∴1
1 + 𝑣o =16 − ln 𝑣q − 𝑣 + 1 + 2 ln 𝑣 + 1 + 2 3 tanpr
2𝑣 − 13
⇒13 ln 1 +
𝑦𝑥
o− 4
16 − ln 𝑣q − 𝑣 + 1 + 2 ln 𝑣 + 1 + 2 3 tanpr
2𝑣 − 13
= − ln 𝑥 + 𝐶
⇒13 ln 1 +
𝑦𝑥
o− 4
16 − ln
𝑦𝑥
q−𝑦𝑥 + 1 + 2 ln
𝑦𝑥 + 1 + 2 3 tanpr
2 𝑦𝑥 − 1
3
= − ln 𝑥 + 𝐶Thiswasaveryloadedsituation;itishighlyunlikelytoseesomethinglikethisinanundergraduateDEcourse.Whentousethismethod?Ifyouhaveasituationwithafirst-orderdifferentialequationthatisnotlinearandtheexactequationmethoddoesnotworkoristwocomplicatedandviceversa.Bessel’sEquationofOrder𝒗Form
𝑥q𝑦ÞÞ + 𝑥𝑦Þ + 𝑥q − 𝑣q 𝑦 = 0SolutiontoFirstKindBessel(𝒗 =fraction)
𝑦 = 𝑐r𝐽4 𝑥 + 𝑐q𝐽p4 𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com194
𝐽4 𝑥 =−1 0
𝑛!𝛤 1 + 𝑣 + 𝑛𝑥2
q0�4∞
012
, 𝐽p4 𝑥 =−1 0
𝑛!𝛤 1 − 𝑣 + 𝑛𝑥2
q0p4∞
012
16𝑥q𝑦ÞÞ + 16𝑥𝑦Þ + 16𝑥q − 1 𝑦 = 0
⇒ 𝑥q𝑦ÞÞ + 𝑥𝑦Þ + 𝑥q −14
q
𝑦 = 0
𝑣 =14
SolutiontoSecondKindBessel(𝒗 =integer)
𝑦 = 𝑐r𝐽4 𝑥 + 𝑐q𝑌4 𝑥 , 𝑌4 𝑥 =cos 𝑣𝜋 𝐽4 𝑥 − 𝑐q𝐽p4 𝑥
sin 𝑣𝜋
16𝑥q𝑦ÞÞ + 16𝑥𝑦Þ + 16𝑥q − 1 𝑦 = 0
⇒ 𝑥q𝑦ÞÞ + 𝑥𝑦Þ + 𝑥q − 9 𝑦 = 0
𝑣 = 3SolutiontoThirdKindBessel(𝜶𝒙 = 𝒕)
𝑥q𝑦ÞÞ + 𝑥𝑦Þ + 𝛼q𝑥q − 𝑣q 𝑦 = 0 ⇒ 𝑥q𝑦ÞÞ + 𝑥𝑦Þ + 𝑡q − 𝑣q 𝑦 = 0Solution
𝑦 = 𝑐r𝐽4 𝑡 + 𝑐q𝑌4 𝑡 = 𝑐r𝐽4 𝛼𝑥 + 𝑐q𝑌4 𝛼𝑥
16𝑥q𝑦ÞÞ + 16𝑥𝑦Þ + 16𝑥q − 1 𝑦 = 0
𝛼 = 4Variationofparameters
𝑦ÞÞ + 4𝑦′ = 3 sin 𝑥1stsolvehomogenoususingconstantcoefficients
𝑦ÞÞ + 4𝑦Þ = 0 ⇒ 𝑦ã = 𝑐r𝑒pÜ� + 𝑐q

Copyright©WESOLVETHEMLLC|WeSolveThem.com 195
2ndSolvetheparticularsolutionusingvariationsofparametersIdentify𝑦r, 𝑦q, 𝑔 𝑥
𝑦r = 𝑒pÜ�, 𝑦q = 1, 𝑔 𝑥 = 3 sin 𝑥 ComputeWronskian
𝑊 𝑥 =𝑦r 𝑦q𝑦rÞ 𝑦qÞ
⇒ 𝑒pÜ� 1−4𝑒pÜ� 0
= 𝑒pÜ� 0 − 1 −4𝑒pÜ� = 4𝑒pÜ�
𝑦Ù = 𝑢r𝑦r + 𝑢q𝑦q
𝑢r = −𝑦r𝑔𝑊 𝑑𝑥 = −
𝑒pÜ�3 sin 𝑥4𝑒pÜ� 𝑑𝑥 =
34 − sin 𝑥 𝑑𝑥 =
34 cos 𝑥
𝑢q =𝑦q𝑔𝑊 𝑑𝑥 =
3 sin 𝑥4𝑒pÜ� 𝑑𝑥 =
34 𝑒Ü� sin 𝑥 𝑑𝑥 = −
368 𝑒
Ü� 4 sin 𝑥 + cos 𝑥
∴ 𝑦 = 𝑦ã + 𝑦Ù
⇒
𝑦 = 𝑐r𝑒pÜ� + 𝑐q +34 cos 𝑥 𝑒pÜ� −
368 𝑒
Ü� 4 sin 𝑥 + cos 𝑥 Methodofundeterminedcoefficients
𝑦ÞÞ + 2𝑦Þ + 5𝑦 = 𝑥𝑒p�
𝑦 = 𝑦� + 𝑦Ùi)
𝑟q + 2𝑟 + 5 = 0 ⇔ 𝑟 = −1 ± 2𝑖 ⇒ 𝑦� = 𝑒p� 𝑐r cos 2𝑥 + 𝑐q sin 2𝑥 ii)
𝑦Ù = 𝐴𝑥𝑒p�, 𝑦Þ = 𝐴𝑒p� − 𝐴𝑥𝑒p�, 𝑦ÞÞ = −𝐴𝑒p� − 𝐴𝑒p� − 𝐴𝑥𝑒p� = −2𝐴𝑒p� + 𝐴𝑥𝑒p�
𝑦ÞÞ + 2𝑦Þ + 5𝑦 = 𝑥𝑒p�
⇒ 𝐴𝑥𝑒p� − 2𝐴𝑒p� + 2 𝐴𝑒p� − 𝐴𝑥𝑒p� + 5 𝐴𝑥𝑒p�, = 𝑥𝑒p�

Copyright©WESOLVETHEMLLC|WeSolveThem.com196
⇒ 𝐴𝑥 − 2𝐴 + 2𝐴 − 2𝐴𝑥 + 5𝐴𝑥 = 𝑥
⇒ 4𝐴𝑥 = 𝑥 ⇒ 𝐴 =14
∴ 𝑦 = 𝑒p� 𝑐r cos 2𝑥 + 𝑐q sin 2𝑥 +𝑥4 𝑒
p�
SecondSolutionforReductionofOrderFindthegeneralsolutionofFrom𝑦 = 𝑦ã + 𝑦Ùtheℎimpliesthehomogeneoussolutionalsothegeneralsolution,the𝑝impliestheparticularsolution.Thisproblemwillnotbeeasytofindtheparticularsolution,henceitstates“findthegeneralsolution”.
𝑥q − 1 𝑦ÞÞ − 2𝑥𝑦Þ + 2𝑦 = 𝑥q + 1Weneedtomakeaguessonthesolutionfor𝑦r.Sincethecoefficientsarepolynomials,weshouldalsochooseapolynomialtobe𝑦r.Startwiththeeasiestoptioni.e.𝑦r = 𝑥.Whydidwechoosethis?Well,𝑦 = 𝑥 ⇒ 𝑦Þ = 1 ⇒ 𝑦ÞÞ = 0 ∴ 𝑥q − 1 0 − 2𝑥 1 + 2 𝑥 = −2𝑥 + 2𝑥 = 0.Wechoseitbecauseitzeroesthehomogeneoussolution.Formula:
𝑦ÞÞ + 𝑷 𝒙 𝑦Þ + 𝑄 𝑥 𝑦 = 0, 𝑦r = 𝒚𝟏 𝒙 , 𝑦q = 𝑣𝒚𝟏, 𝑣 =1𝒚𝟏 q 𝑒
p 𝑷 𝒙 »�𝑑𝑥
1
𝑥q − 1 𝑥q − 1 𝑦ÞÞ − 2𝑥𝑦Þ + 2𝑦 = 𝑥q + 1 ⇒ 𝑦ÞÞ + −𝟐𝒙
𝒙𝟐 − 𝟏 𝑦Þ +2
𝑥q − 1 𝑦 =𝑥q + 1𝑥q − 1
∴ 𝑷 𝒙 = −2𝑥
𝑥q − 1 ⇒ 𝑣 =1𝑥 q 𝑒
p p 𝟐𝒙𝒙𝟐p𝟏
»�𝑑𝑥 =1𝑥q 𝑒
»»� ��pr��pr »�𝑑𝑥 =
1𝑥q 𝑒
®¯ ��pr 𝑑𝑥
1𝑥q 𝑥q − 1 𝑑𝑥 = 1 − 𝑥pq 𝑑𝑥 = 𝑥 +
1𝑥
∴ 𝑦ã = 𝑐r𝑥 + 𝑥 𝑥 +1𝑥 𝑐q = 𝑐r𝑥 + 𝑥q + 1 𝑐q
Solvefortheparticularusingundeterminedcoefficients(Ifyoutry𝐴𝑥q + 𝐵𝑥 + 𝐶itwon’tworksomoveupthepolynomial)
𝑦Ù = 𝐴𝑥o + 𝐵𝑥q + 𝐶𝑥 + 𝐷 ⇒ 𝑦ÙÞ = 3𝐴𝑥q + 2𝐵𝑥 + 𝐶 ⇒ 𝑦ÙÞÞ = 6𝐴𝑥 + 2𝐵
𝑥q − 1 𝑦ÞÞ − 2𝑥𝑦Þ + 2𝑦 = 𝑥q + 1

Copyright©WESOLVETHEMLLC|WeSolveThem.com 197
⇒ 𝑥q − 1 6𝐴𝑥 + 2𝐵 − 2𝑥 3𝐴𝑥q + 2𝐵𝑥 + 𝐶 + 2 𝐴𝑥o + 𝐵𝑥q + 𝐶𝑥 + 𝐷 = 𝑥q + 1
⇒ 2𝐴𝑥o − 6𝐴𝑥 − 2𝐵 + 2𝐷 = 0 𝑥o + 1 𝑥q + 0 𝑥 + 1 𝑥2
⇒ 𝑛𝑜𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛𝑎𝑔𝑎𝑖𝑛…
Tryvariationofparameters
𝑊 = 𝑥 𝑥q + 11 2𝑥
= 2𝑥q − 𝑥q + 1 = 𝑥q − 1
𝑢r =𝑦q𝑔𝑊 𝑑𝑥 =
𝑥q + 1 q
𝑥q − 1 𝑑𝑥
𝑢q =𝑦r𝑔𝑊 𝑑𝑥 =
𝑥 𝑥q + 1𝑥q − 1 𝑑𝑥

Copyright©WESOLVETHEMLLC|WeSolveThem.com198
UnitCircle
Copyright©WeSolveThem.com|WESOLVETHEMLLCPublished:August2017,U.S.A.