Chapter3 Vibration Ahmedawad
22
III. FREE VIBRATION OF DAMPED SINGLE DEGREE OF FREEDOM SYSTEMS Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.1 3.1. Tvpes of Danrqins 3.1.1. Viscous Damping Viscous damper (dashpot) Damping force on mass = - c X, c is the coefficient of viscous damping I N/(m/s) = N.s/m ]. \1, Mohamed T. Hedaya MECHANICAL VIBRAT]ONS First Edition, p. 3.2
-
Upload
ahmed-awad -
Category
Documents
-
view
22 -
download
0
description
Vibration
Transcript of Chapter3 Vibration Ahmedawad

III. FREE VIBRATION OF DAMPED SINGLE
DEGREE OF FREEDOM
SYSTEMS
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.1
3.1. Tvpes of Danrqins
3.1.1. Viscous Damping
Viscous damper (dashpot)
Damping force on mass = - c X,
c is the coefficient of viscous damping I N/(m/s) = N.s/m ].
\1,
Mohamed T. Hedaya MECHANICAL VIBRAT]ONS First Edition, p. 3.2

{:
%
.t{
)
\/,t4
J[1,n.
'-)
\,I
i
It,' , \Ii, {r" , .\f\.i
N
iI
a 1i); i -t:";ir ll\ r t<Vlg
llc,-IJ "rti\/ [ \( o)
i,..1-,
-1-\i1
hlL l,/',^.,/ Vi Ii
lJ ilL-
t
I
e,oul c- b /r^PM\
DSTt:rA
.l r'
N ).r, ".:tl- .i ,,'.
I. . r__ .ttiI i I -1',I i I r*t
-.t._==
i1---irt.\
l'/
-is
,,-..:.,

3.1.2. Hysteresis Damping (Structural Damping)
When an elastic member
is loaded and unloaded in
its elastic region, the
(Stress - Strain) relation
is not the same during
loading and unloading.
This is due to the friction
between the internal
layers of the material,
which indicates that actual materials are not perfectly elastic. This gives a
loop on the (Stress - Strain) diagram called Hysteresis loop.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.3
Strain(displace rnent)
' Stress (force)
eresIS
The area of the loop on the (Force - Displacement) diagram of the
member denotes the energy disslpated by Hysteresis damping during one
cycle of loading and unloading of this member.
ln order to study the vibrations of systems with Hysteresis damping,
Hysteresis damping is replaced by the viscous damping which dissipates
the same energy per cycle. The coefficient of .this viscous damping is
called the coefficient of equivalent viscous damping (c").
Original system Equivalent system
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition , p.3.4

AIlr-
/.I
L) L'
Ic( -+ k t,,',,n-l -, ' ,i'-)
InLr*uJ -."rn
'!;1 -ti4
At-= Trq kA".t-.
z*d
,t

For a system damped by Hysteresis damping and performing harmonic
motion x = A cos @t, it was found, experimentally, that, the energy
dissipated by Hysteresis darhping per cycle (AE) is proportional to the
maximum strain energy in the system during the cycle t1 t n2;. Tfris givesa ,2
AE=nqkA2 (1) (J,..".-,,i.*)
11 is called the Hysteresis damping factor, the structural damping factor or
the loss factor of the material causing the damping.
It can be proven that, the energy dissipated by viscous damping per cycle,
for the same motion is given by
AE = n cu rr: A2 (2)
(1) and (2) -> j ce =
nku)
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.5
3.1.3. Coulomb Damping (Ory Fniction)
Magnitude of damping force on mass = Fo = P N,
p is the kinematical coefficient of friction.
Damping force on mass is opposite to X.
x
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.6

[n# + cf oK]c=o
ffir'
i'
ur[: Z.Kn ,
rK, r"UK
L,l Kryr_i \ i-Jr
')* s1 (jJn
Nll(,r) =
K,1 ls
: - k*:l5''al
t: N-1,lt
(,0,., . " t.:
=
lrl=
+ C-lt + Kr:e
t- ..lc'*4km
2- rn {}h

3.2. Viscous Dampinq
mX=-cx-kxmX +cX+kx=0This is the differential equation of motion (D.O.F.M.).
Solution of this equation depends on the value of c relative to (2Jk m),
which is equal to (2 p1 urn). This solution is explained in Appendix A.2.
Let(=cl(2mr,.rn).
This gives three Gases: (1) ( > 1, (2) 1= 1, (3) ( < 1
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.7
Case 1: Overdamped System (c > Zmrrl") (( > 1)
E.O.M. o x = Ar er,t + Az e^r' , oAr,Az=(-#rl(;'l *t J rt
Ar and Az ar€ constants determined by initial conditions.
Motion is nonoscillatory.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.8

)*''r,r.C"*ryr
r i'\ll.V l;(- . -)U1 tr -=r-r )C*--:B\,1-ltnr.-tt,(: Lr
Lulr,ll[r,t ^1 Il') 5 / n4 j
t ,/\
-J71,*,'; t7
-
'-A\:r-----=' '--
-r-heItr'tJ\rf . t ,a
{)tll nf'"J|,)J
*1,;{*. t rsclls

Case 2: Critically Damped $ystem (c = 2muln) {( = 1)
D.O.F.M. mX +cx+kx=0E.O.M. I X = (Ar + Ae t) e-rnf ,
A1 and 42 or€ constants determined by initial conditions.
Motion is nonoscillatory.
Mohamed T. Hedaya MECHANICAL VIBMTIONS First Edition, p.3.9
Effect ef Dampinq o0 Settlins Tipe
. With zero irlitial velocily, the time required for the system to reach its
equilibrium position increases as damping increases.
. Critically damped system takes the shortest time. Therefore, the pointers
of measuring instruments are usually designed to be critically damped.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.10 i

Case 3: Underdamped $ystem (c < 2mor) (( < i)D.O.F.M. mX +cx+kx=0E.O.M. ox=as-(r.,rnt cos(t*6t-p), j h)d =h)n J71 ,
j.A and B are constants determined by initial conditions.
- 4g*(t^t"t
Motion is oscillatory with deeaying (amplitude) and eireii{ar frcrquency uro.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.11
har r >nic- r' i:' \
'l ..^rl',.-i
Loa a r i th m i c d e-c re m e Q!
Xr- = **(r^r^(tr-tz) - *(t,r"(tz-t,) -;,x2
X', =
"(r^rnTox2
_ _ 2-_!!"
sJ"r
Mohamed T. Hedaya MECHANICAL VIBMTIONS First Edition, p.3.12

il'.1
l'i,t

x2
x1 -^o t
x26=(urnTo=qwn2I
h)6 uJn frI E,
2n(
^ff426 (= 2nU,lt:(' I is catted the lggryIhglg-desremgnt"
Generally, I1 = X'
= xt -x2 x3 x4
x1 =
X, * *, * I, ....... x xn = en6
Xn+1 X2 X3 X4 Xn+1
This means that, when ( is known, 6 can be determined from the relation
(6 = ZnQ..fi1), and then, the ratio (x1lxn*1) can be found.
xn
The relation r j1-Xn+1
MECHANICAL VIBRATIONS First Edition, p. 3.13
(3)
(4)
1ln x1
n Xn+1
6
J+"U;62^lt
- q'
i A usual practical way to determine ( is to let the system vibrate freely, to
determine the ratio between two amplitudes (x1 / xp*r)and use equation (3)
to find 5. Then, equation (4) can be applied for the determination of (.
Gritical damping coefficient {c"}
c" is defined as the damping coefficient required to make the system
critically damped, or the minimum damping coefficient which produces
nonoscillatory motion. lt is obtained from e c. = 2 m on"
Darnping factor (damping ratio) {0( is defined asthe ratio between cand c*. -p c (= c/ c. = c/ (2 m ron).
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.14

Motion with Different Values of Damping Factor(fl
MECHANICAL VIBRATTONS First Edition, p. 3.15
3.3. Hvsteresis DamEin$ (Strugtural Darnpinsl
Original systemjce=r1 k/tl (5)
ln free vibration, tll is equal to tllo, which
can not applied for direct calculation of c".
Equivalent system
depends on ce. So, equation (5)
Substitution for c" and u gives
,1rQ 6 tdn) =qk
Ldn
.\=2luEquations
1- 1,' (6) -> .21"2-l-t[:F (7)
(6) and (7) can be used for calculation of q and (" respectively.
.l 7l- 5e
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.16

3.4. GoulorTb Dampinq (D_rv Friction)
Consider the following case
k= 2 N/cm N=mg=2A
Fo=[.lN=6
Six equilibrium positions
Frictionless eguilibrium position
N
N
1cm:1
2cm
3cm
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.17
The mass can stay in static equilibrium within an equilibrium zone of tength
6 crn, 3 cm to the left of the frictionless equilibrium position and 3 cm to the
riQht of the frictionless equilibrium position.
r The ma$s of a spring-ma$s system can stay in static equilibrium on arough plane within an equilibrium zone of length 2A, A to the left of the
frictionless equilibrium position and A to the right of the frictionless
equilibrium position,
oA=UN/k= Fd/k.
o During free vibration, the mass stops when its velocity becomes zero
within the equilibrium zone.
MECHANICAL VIBRATIONS First Edition, p. 3.18Mohamed T. Hedaya

a -- ( , _B) *-13-fi (u\ \-unL *y J , k

Equation of motion
Exampl?
Considera spring-mass system with x(0) - Xr: and x(0) = 0.
1- First half cycle (from right to left) (X< 0) L
mX=-kx+FomX+kx=Fo
x = A cos(u.rnt - F) + Fd / k = A cos(,ri, - F) + A
lnitial conditions -) x = (Xo - Ai cos(t*nt) + 6Motion is harmonic with circular frequency
u)n , amplitude (Xo - A) and center Or.
Xtn+A=Xo-A-;>Xtn=Xo-2A (8)
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.19
2- Secon d half cycle (from left to right) $ > A)
mX=-kx-FomX+kx=-Fo
x = A cos(tont - F) - Fd / k = A cos(or,,t - B) - A
lnitial conditions -) x = (Xlz - A) cos(ulnt) - A
Motion is harmonic with circular frequency A
kln , amplitude (Xtn - A) and center O2. * A
Xr +A=X,z-A-;>Xr = X1lz' 2 b, {9)
.X
Mohamed T. Fledaya MECHANICAL VIBRATIONS First Edition, p. 3.20


Reduction of (apparent a
Xtn=Xo-2A (B)
Equations (8) and (9) s
2A everv half cvcle.
Reduction of (apparent amplitude)
Xtn=Xo-2A (B) Xr=Xtn-ZA, (9)
Equations (8) and (9) show that, the (apparent amplitude) is reduced by
2A every half cycle.
(Apparent amplitude) and mass position
r(Apparentamplitude)afternhalfcycles=Xnlz=Xo-2nA>
o Position of mass after n half cycles = xn1 = (-1)n (Xo - 2 n A)
iriass Etop
Mass stops after n half cycle, if (k Xnrz < Fo) , i.e. if (Xnrz 5 A), i.e. if the
mass is inside the equilibrium zone.
ln order to find n, put Xnrz s A. This gives
X6-2 n A<A-), -2nAs -Xo+A-) r n 2 5 -O.U2A
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.21
Examole
m=2kg k='1974N/m U=0.3x(0) = g x(0) = 29 mm (to the right)
Find time and position at which mass stops.
fk- trry = 31.41T radls*)n = {* = l-,
a = L = lN = Fmg - 0.3x2x9.81
= o.oo3 mkkk1s74
2L, 2 x 0.003
tso=9*r=!* 2n =q,. j"-=o.s $2 2 u)n 2 31.417
Xs/z= (-1)u(0.029 - 2x5x 0.003)=0.00t m - 1 mm(tothe right)
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.3.22

\i\cou\f) v' +CX t
X, = €n'x,*
',l"*rnnpk{-e
Q_L
'sL*
(_tJ; Lun
zl\tti t,u*r/
-/) a
1A'.-.,,.,.ir-,
(
\ st-a
ear6*b (pr^^ -.a \ -Yn -: k"r^_'L -{- I \
R.Jr.{ io. Fr'l r,rn .*i I
t?,t',
)J^l I (q cl,.
c'
['.,,1

30
x(mm)
20
10
0
-10
-20
-30
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.23
3.5,_$olved Examples.
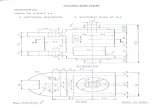
Example 3.1
L=500 mm b=300 mm
m=6 kg
c = 20 N.s/m '
k = 200 N/m
0(0; = 6.7' c.W. 610; = s
Find time and position after two cycles.
x-_b 0
Uniform rod
Mohamed T. Hedaya

t"o \'.. \,\aa\. ',,
T 1"rU)n
2T
.**lwffi
V ' =q.r-{ J a* pJ

Example 3.2
L = 1200 mrn
m=20 kg
q = 0.04
x(0) = 19 mm
d=30 mm
E = 20x1010 N/m2
x(0) = g
Find time and position after two cycles.
Example 3.3
L=500 mm
k = 200 Nlm
0(0) = 6,7o C.W.
m=6 kg
To = 0.5 N.m
6101 = s
Find time and position after two cycles.
Find time and position at which rod stop{
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 3.25
Uniform rod