Chapter 7 Angular Momentum - cool.ntu.edu.tw
16
Chapter 7 Angular Momentum Benson: Chap.11 & Chap.12 Q: What is the fundamental difference between linear motion and circular motion? The angular momentum is an analogue of the linear momentum, but associated with circular motion. 7.1 Torque and Angular Momentum Take the cross product of r with Newton’s 2nd Law, F = ma ) r ⇥ F = mr ⇥ dv dt = m d dt (r ⇥ v) - m dr dt ⇥ v = m d dt (r ⇥ v) . (7.1) Thus we have This is similar to F = dp/dt, but with linear motion replaced by angular rotation. ⌧ = d dt L, (7.2) where ⌧ ⌘ r ⇥ F, (7.3) L ⌘ mr ⇥ v (7.4) are the torque and the angular momentum for the particle. The direction of the angular momentum is defined by the right-hand rule. Q: Do the total external torque and the total angular momentum of a system of N particles satisfy the same relation? The discussion of composite systems of particles only is incomplete because electromagnetic fields can also carry energy, momentum and angular momentum. Define the total external torque and the total angular momentum for a system of particles by superposition ⌧ ext tot ⌘ X i ⌧ ext i = X i r i ⇥ F ext i , (7.5) L tot ⌘ X i L i = X i m i r i ⇥ v i , (7.6) 63
Transcript of Chapter 7 Angular Momentum - cool.ntu.edu.tw
Chapter 7
Angular Momentum
Benson: Chap.11& Chap.12
Q: What is thefundamental
differencebetween linear
motion andcircular motion?
The angular momentum is an analogue of the linear momentum, but associated withcircular motion.
7.1 Torque and Angular Momentum
Take the cross product of r with Newton’s 2nd Law,
F = ma
) r⇥ F = mr⇥ dv
dt= m
d
dt(r⇥ v)�m
dr
dt⇥ v
= md
dt(r⇥ v) . (7.1)
Thus we haveThis is similar toF = dp/dt, but
with linearmotion replaced
by angularrotation.
⌧ =d
dtL, (7.2)
where
⌧ ⌘ r⇥ F, (7.3)
L ⌘ mr⇥ v (7.4)
are the torque and the angular momentum for the particle.The direction of the angular momentum is defined by the right-hand rule.
Q: Do the total external torque and the total angular momentum of a system of Nparticles satisfy the same relation?
The discussion ofcompositesystems of
particles only isincomplete
becauseelectromagnetic
fields can alsocarry energy,
momentum andangular
momentum.
Define the total external torque and the total angular momentum for a system ofparticles by superposition
⌧ ext
tot⌘X
i
⌧ ext
i=X
i
ri ⇥ Fext
i, (7.5)
Ltot ⌘X
i
Li =X
i
miri ⇥ vi, (7.6)
63

where F ext
iis the external force acting on the i-th particle of the system, and ri, vi
are the position and velocity of the i-th particle.Assuming that the force between two particles is always parallel to their separation
vector, i.e.Fij k (ri � rj), (7.7)
we find
⌧ ext
tot=
d
dtLtot. (7.8)
Equivalently, Zdt⌧ ext
tot= �Ltot. (7.9)
Exercise: Prove the statement above.Solution:We have
d
dtLtot =
X
i
d
dtLi =
X
i
⌧i =X
i
ri ⇥ Fi
=X
i
ri ⇥
2
4Fext
i +X
j 6=i
Fij
3
5 =X
i
ri ⇥ Fext
i +X
i 6=j
ri ⇥ Fij
=X
i
⌧ ext
i +1
2
X
i 6=j
[ri ⇥ Fij + rj ⇥ Fji]
= ⌧ ext
tot +1
2
X
i 6=j
(ri � rj)⇥ Fij = ⌧ ext
tot . (7.10)
The total angular momentum is conserved for an isolated system.
A hypothetical example that violates the assumption (7.7) is Fij = A(ri ⇥ vj � rj ⇥ vi). Eq.(7.8)would be violated for this force.
Q: Are there forces in nature that disobeys eq.(7.7)?Yes. The expectation that forces should always be in the direction of the displacement between twobodies might have delayed the discovery of the force between electric currents and magnets.
Q: Does this mean that internal force can generate total angular momentum, and angular momen-tum would no longer be conserved?Even when there are forces (e.g. magnetic force on a charge) that do not satisfy eq.(7.7), we canmodify the definition of the angular momentum so that it is still conserved. (Recall Noether’stheorem.)
Q: How would ⌧ ext
totand Ltot transform under a translation?
64

A translation (a shift of the origin) by r0,
ri ! r0i= ri � r0, (7.11)
leads toIn the center ofmass frame, the
angularmomentum is
invariant under ashift of the
origin.
⌧tot ! ⌧ 0tot
= ⌧tot � r0 ⇥ Ftot, (7.12)
Ltot ! L0tot
= Ltot � r0 ⇥Ptot. (7.13)
Q: If eq.(7.8) holds for a choice of the origin, will it hold for a shift of the origin?
Angular momentum is
1. additive,
2. conserved for isolated systems,
3. associated with rotation symmetry.
Angular momentum is different from linear momentum in that
1. it depends on the choice of a reference point (the origin),
2. there can be internal angular momentum (spin),
3. conservation of angular momentum for any choice of origin demands conserva-tion of linear momentum.
Example:
1. What is the angular momentum of a free particle moving at a given velocity v?
2. What is the angular momentum of the system of two stars circulating aroundeach other? Consider two choices of the origin: (1) at the center of mass, (2)far away from both stars with a boost.
3. Rotations of rigid bodies: spinning tops, gyroscopes. (The rotation axis can bemoving and rotating.)
7.2 Rigid Body
It is not easy to predict the behavior of rigid bodies because the internal force maybe hard to calculate and the deformation hard to observe. Hence, general principles
Recall“rattleback”.such as the conservation of angular momentum are important.
It is remarkable that, despite our ignorance of all the details (the motion and forces of all thedifferent parts of a rigid body), it is still possible to have a predictive theory of rigid bodies.
65

Example: Rotating wheel.Anti-gravity?
A rotating wheel has one end of its axis tied to a string hung on the ceiling.
1. Q: What is the relation between the direction of the wheel’s rotation aroundits axis and the direction its axis rotates around the string?
2. Q: How much is the force of the string pulling on the axis?
3. Q: Why does the wheel’s axis slowly tilt downward?
4. Q: When we let go of the rotating wheel, the axis starts to rotate and the angularmomentum acquires an upward component. How is the angular momentum ofthe system not conserved in the vertical direction?
What happens inside a rigid body system is hard to tell from its appearance, since the internal forceon different parts of the rigid body does not result in observable deformation. However, physicallaws must be obeyed, and conservation laws (including their non-conservation due to external forces)are ready to apply to the whole system, ignoring many details that we cannot observe.
Q: We need 6 parameters (x, y, z, px, py, pz) to specify uniquely the physical state of apoint particle. How many parameters do we need to specify the state of a rigid bodyat any instant of time?
The state of a rigid body is specified by
1. the center-of-mass position rCM , or (xCM , yCM , zCM).
2. the center-of-mass velocity vCM , or (pCM
x, pCM
y, pCM
z).
3. the orientation specified by 3 angular parameters for a generic non-symmetricrigid body.
4. the instantaneous angular velocity ! = !n, or equivalently the axis of rotationand the angular frequency (3 parameters).
66

Q: What is the translational velocity of a point at r on a rotating rigid body?v = ! ⇥ r.
(Assume that the origin is on the axis of rotation.)ar = R!2, whereR is the distancefrom the axis of
rotation.Q: What is the centripetal acceleration of a point at r on a rigid body with angularvelocity ! = !n?
Q: What is the tangential acceleration of a point at r on a rigid body with angularaT = R↵, whereR is the distancefrom the axis of
rotation.acceleration ↵? (Assume that ↵ = d!
dtn for a rotation with a fixed axis n.)
In the following, we will focus on rigid bodies with a fixed axis of rotation. The more general caseof time-dependent axis of rotation (↵ , !) can be very complicated. (c.f. tippe top).
7.3 Moment Of Inertia And Rigid Body
There are several different types of problems: (1) A rigid body is mechanically re-stricted to rotate around a fixed axis. (2) A rigid body is free to move and rotatepossibly with external forces but no external torque with respect to the center ofmass. (3) A rigid body is free to move and rotate under the influence of externaltorques with respect to the center of mass.
A rigid body hasa fixed distance
between any twogiven points.
The notion ofrigid body does
not exist inspecial relativity.
For a rigid body composed of a single point mass at r, assuming that the originis on the axis of rotation and that the angular velocity is ! = !n, we have
L = mr⇥ v = mr⇥ (! ⇥ r). (7.14)
The projection of L in the direction of ! is
Notice that theaxis of rotationis fixed in this
section.
L! ⌘ ! ·L =m
!! · (r⇥ (!⇥ r)) =
m
!(r⇥!) · (r⇥!) =
m
!|r⇥!|2 = mR2!, (7.15)
whereR ⌘ |r⇥ !| (7.16)
is the distance from the point to the axis of rotation.For a rigid body composed of N particles, the magnitude of the total angular
This isreminiscent of
p = mv, but itis not a vector
identity.
momentum is
L! = I!, (7.17)
where the moment of inertia is
I ⌘X
i
miR2i. (7.18)
67

Q: Do we always have L = I!?In general, the equation (7.17) cannot be promoted to the vector equation L = I!. In the center-of-mass frame, the total angular momentum is independent of the point of reference.
Example: Let ! = z!, m1 = m2 = m, r1 = �r2 = xx + zz at an instant of time t, thenL1 = L2 = m!x2z � m!zx at t. This is in the CoM frame and the reference point lies on therotation axis. The total angular momentum is Ltot = 2mx2!z� 2m!zx , ! at t. In this case, thecomponent of L in the ! direction is constant, but the components of L in other directions are not.This can happen since there are external torques.When there is no external torque, we expect both L and ! to be constant, so the identity (7.19)below implies that L k ! and thus L = L!! = I!.
Exercise: Prove that, for a rigid body rotating at a constant angular velocity !, wehave
d
dtL = ! ⇥ L. (7.19)
Solution:For a rigid body decomposed as N point masses, the velocity for the i-th point mass isvi = ! ⇥ ri. With d
dt! = 0, we have
d
dtL =
X
i
mi (vi ⇥ vi + ri ⇥ (! ⇥ vi)) =X
i
mi (!(ri · vi)� vi(ri · !)) = �X
i
mivi(ri · !).
On the other hand,
! ⇥ L =X
i
mi! ⇥ (ri ⇥ vi) =X
i
mi (ri(! · vi)� vi(! · ri)) = �X
i
mivi(! · ri).
Hence the identity is proved.
Q: What is the moment of inertia of a uniform rod of mass M and length L rotatingI = 1
3ML2.along the perpendicular axis at one end?
Q: What is the moment of inertia of a uniform rod of mass M and length L rotatingI = 1
12ML2.along the perpendicular axis at the center?
Q: What is the moment of inertia of a uniform disc of mass M and radius R rotatingI = 1
2MR2.along the perpendicular axis through its center?
Q: What is the moment of inertia of a uniform disc of mass M and radius R rotatingI = 1
4MR2.along the axis parallel to the disc through its center?
Q: What is the moment of inertia for a rigid body with a given mass density distri-bution ⇢(r) and an axis of rotation n?
Comments:
1. I is always proportional to M .
2. I is proportional to R2 if R is the only parameter with the dimension of length.
68

3. The numerical factor can differ a lot.
Example: Ice skaters.
Q: Why do they spin faster with arms folded?Q: Does toilet
water alwaysdrain
counterclockwisein the Northern
Hemisphere?
Q: Why is everything (the earth, the moon, all the planets, the sun, the galaxy, ...)rotating?
Exercise: Rod pendulum.What is the frequency?
Exercise: Prove that the kinetic energy of a rigid body rotating around a fixed axisat the angular velocity ! is
K =1
2I!2. (7.20)
Solution:
K =1
2
X
i
miv2i =
1
2
X
i
mi(Ri!)2 =
1
2I!2. (7.21)
Exercise: For a rigid body rotating around a fixed axis, show thatZ
⌧ extd✓ = �K. (7.22)
Solution:Z
⌧ exttot d✓ =
ZdLtot
dt!dt =
ZI!
d!
dtdt =
Z1
2d(I!2) = �K. (7.23)
Example: Cylinders rolling down a hill.
Q: Which rolls down faster?For a cylinder of radius R, moment of inertia I and mass M , its speed v is related
to the angular velocity ! by v = R!. The gravitational potential energy is transferredinto kinetic energy
K =1
2Mv2 +
1
2I!2 =
1
2
✓M +
I
R2
◆v2. (7.24)
For a cylinder starting at rest and falling down a height h,
gh =1
2
✓1 +
I
MR2
◆v2. (7.25)
Cylinders with larger ratios of I/MR2 have slower velocities. A hollow cylinder isslower than a solid one.
69

7.4 Center-Of-Mass Frame For Rigid BodyThe motion of
the center ofmass of an
arbitrary systemhas been
discussed in theprevious chapter.
In principle, the motion of a rigid body can be decomposed into the motion of itscenter of mass and its rotation with respect to its center of mass.
When the total external force vanishes, the center-of-mass (CoM) frame is theinertial frame in which the center-of-mass velocity vCM vanishes.
In the CoM frame, the total angular momentum of a system is invariant under atranslation of the origin. The choice of the origin becomes irrelevant.
For a rigid body, the kinetic energy isKCM = 1
2I!2 is
analogous toK = 1
2mv2.K =
1
2Mv2
CM+
1
2I!2. (7.26)
Q: How are I and ! in the equation above defined?
Exercise: Prove the statement above.Solution:Let the kinetic energy of a system of N particles in the CoM frame be denoted
KCM ⌘X
i
1
2mi(vi � vCM )2. (7.27)
For a rigid body, the CoM kinetic energy can only be the kinetic energy of rotationAssume a fixed
axis to define I.KCM =
X
i
1
2mi(! ⇥ ri)
2
=1
2
X
i
miR2i!
2 =1
2I!2. (7.28)
The kinetic energy in a general reference frame is
Ktot =NX
i=1
1
2miv
2i =
X
i
1
2mi [(vi � vCM ) + vCM ]2
=X
i
1
2mi
⇥(vi � vCM )2 + 2vCM · (vi � vCM ) + v2CM
⇤
= KCM + vCM · X
i
mivi �MvCM
!+
1
2Mv2CM
= KCM +1
2Mv2CM . (7.29)
Hence, we find eq.(7.26).The work-kinetic energy theorem has its rotational version:
�
✓1
2I!2
◆=
Zd
dt
✓1
2I!2
◆dt =
ZI!
d
dt!dt
=
ZId
dt!d✓ =
Zd
dtLd✓ =
Z⌧d✓. (7.30)
70

Hence, for rotations around a fixed axis (with respect to which the moment of inertiaI is defined), the work is R
⌧d✓ =
�⇥12I!
2⇤
isanalogous toR
F · dr =
�⇥12Mv2
⇤.
W =
Z⌧d✓. (7.31)
analogy among energy, momentum and angular momentum
symmetry conserv. change ratet ! t+ c E powerr ! r+ c P force✓ ! ✓ + c L torque
7.5 Exercises
HW: (E-4) A person of weight W runs with a velocity v along a line tangent to astationary uniform circular platform of radius R and mass M , and jumps on. Theplatform can rotate about a vertical axis. Find
1. the angular velocity after the person jumps on,
2. the loss in kinetic energy,
3. whether the loss in kinetic energy would increase or decrease for a larger massof the platform.
Assume that the platform is a uniform disk.Solution:1. The initial angular momentum with respect to the center of the platform is L = vRW/g.The moment of inertia of the platform is I = MR2/2. The moment of inertia of the platformwith the person is Itot = MR2/2 +WR2/g. Angular momentum conservation implies that
! =L
Itot=
vRW/g
MR2/2 +WR2/g=
Wv
R(Mg/2 +W ). (7.32)
2. The loss in kinetic energy is
1
2
W
gv2 � 1
2Itot!
2 =WMv2
2(Mg + 2W ). (7.33)
3. The loss in energy increases for a larger M .
Exercise: A dumbbell consists of two equal particles of mass m separated by adistance 2a. It is initially attached along a radial line to a disk that is rotating at! rad/s about a vertical axis. The center of the dumbbell is at distance R from thecenter of the disk. What is the kinetic energy of the dumbbell after it is suddenlyfreed? Assume that all the motions occur on a horizontal frictionless plane.
71

Solution:Two approaches:Approach 1:
K =1
2mv21 +
1
2mv22 =
1
2m⇥(R+ a)2 + (R� a)2
⇤!2 = m(R2 + a2)!2. (7.34)
Approach 2:
K =1
2Mv2 +
1
2I!2 =
1
2(2m)(R!)2 +
1
2(2ma2)!2 = m(R2 + a2)!2. (7.35)
Exercise: A disk of radius R and moment of inertia I1 rotates with angular velocity!0. The axis of a second disk of radius r and moment of inertia I2 is at rest. The axesof the two disks are parallel. The disks are moved together so that they touch. Aftersome initial slipping, the two disks rotate together. Find the final rate of rotation ofthe smaller disk.Solution:Angular momentum is not conserved even though there is only internal force for the systemof the two disks. But we should not think of it as a single system as there are two axes,while each axis exerts torque with respect to the other axis.The forces on the two disks are of equal magnitude f by Newton’s 3rd law.According to eq.(7.9), the changes in the angular momentum in both disks are related inmagnitude (and opposite in direction)
|⌧1| = fR, |⌧2| = fr
) |⌧1|R
=|⌧2|r
)Z
dt|⌧1|R
=
Zdt|⌧2|r
) |�L1|R
=|�L2|
r) I1(!0 � !1)
R=
I2!2
r
)I1(!0 � r
R!2)
R=
I2!2
r) !2 =
I1!0
Rr�I1R2 + I2
r2
� . (7.36)
Exercise: A rope of length L and mass M hangs over a pulley of radius R andmoment of inertia I. Suppose the initial velocity is zero when the two ends arealmost equally high, find the velocity of the rope when the two ends have a heightdifference of x, assuming that there is no slipping and L > ⇡R + x.Solution:Approach 1:Let the total friction between the rope and the pulley be f (not added as a vector butintegrated along the rope).The torque on the pulley is
fR = I↵ = Ia
R. (7.37)
72

The rope has the acceleration
a =M x
Lg � f
M=
M x
Lg � I a
R2
M, (7.38)
where x is the difference in height of the two ends of the rope, so
a =x
Lg
1 + I
MR2
⌘ C2
2x
C ⌘
s2Lg
1 + I
MR2
!(7.39)
where a = 12d2x
dt2. To solve the differential equation, try the ansatz x(t) = Aebt. We find
b = ±C, sox = AeCt +Be�Ct. (7.40)
At t = 0, x(0) = A + B and v(0) = 12dx/dt = (A � B)/2. If we have x = ✏ and v = 0 at
t = 0, we haveA = B =
✏
2, (7.41)
sox(t) = ✏ cosh(Ct). (7.42)
The velocity at t is
v =1
2
dx
dt=
C
2✏ sinh(Ct) =
C
2
px2 � ✏2 ' Cx
2. (7.43)
Approach 2:The change in the potential energy of the rope is
�Urope = �x
2
x/2
LMg = � x2
4LMg. (7.44)
The change in the kinetic energy of the rope is
�Krope =1
2Mv2. (7.45)
The change in the kinetic energy of the pulley is
�Kpulley =1
2I!2 =
1
2Iv2
R2. (7.46)
Energy conservation saysNote that
eq.(7.43) allowsus to solve x(t).0 = �E = �Krope +�Urope +�Kpulley = � x2
4LMg +
1
2M
✓1 +
I
MR2
◆v2, (7.47)
which implies eq.(7.43).
HW: (E-5) A ruler of length L and mass M sits at rest on a frictionless surface alongthe y-axis. A piece of clay of equal mass M moving at velocity u = u0 cos ✓x+u0 sin ✓y
hits on the ruler at a distance L/2 above the center of the ruler, and sticks to itafterwards.
1. Where is the center of mass of the ruler-clay system after the collision?
73
2. What is the center-of-mass velocity of the ruler-clay system after the collision?
3. Assuming that the ruler is uniform, what is its moment of inertia of the ruler-clay system with respect to its center of mass?
4. What is the angular velocity of the ruler-clay system after the collision?
Solution:
1. L/4.2. vCM = u/2.3. Itot =
RL/4�3L/4 dx
M
Lx2 +M(L/4)2 = 5ML
2
24 .
4. ! =�zMu0
L4 cos ✓
Itot= �z6u0 cos ✓
5L .
Exercise: A spinning top of mass m and moment of inertia I spins at the angularvelocity z!. What would be the reading of its weight on a weight scale? Solution:
mg. (7.48)
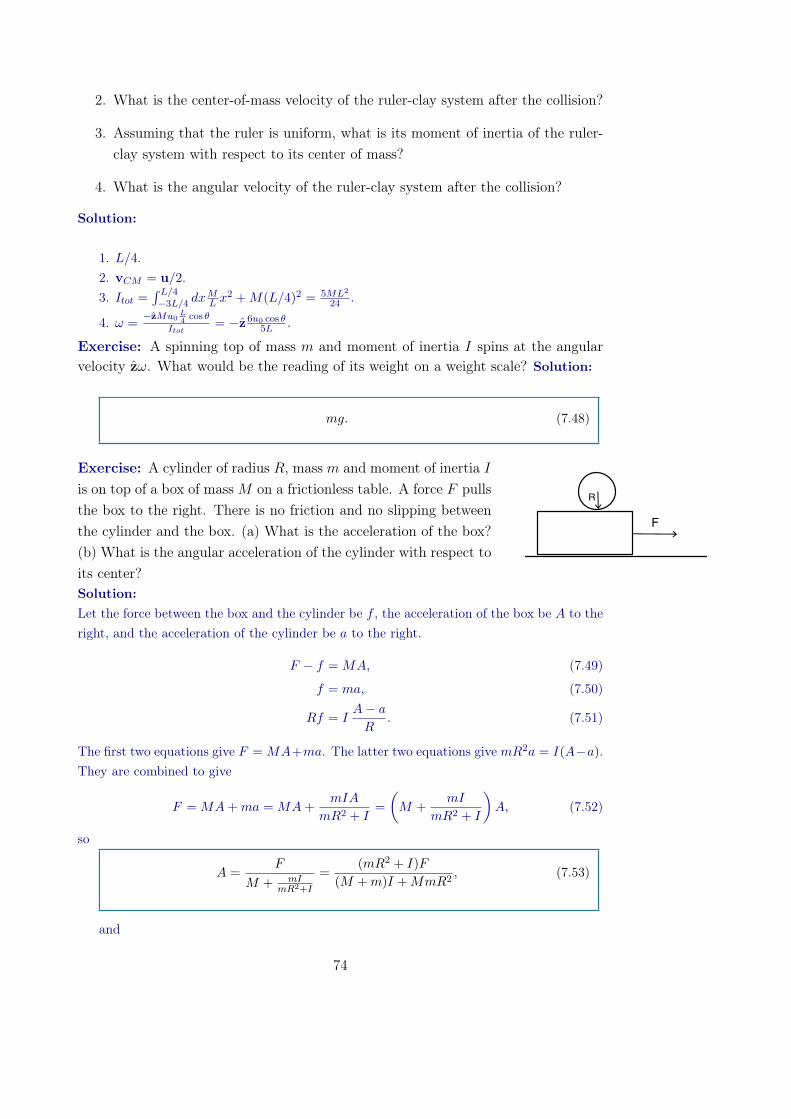
Exercise: A cylinder of radius R, mass m and moment of inertia I
is on top of a box of mass M on a frictionless table. A force F pullsthe box to the right. There is no friction and no slipping betweenthe cylinder and the box. (a) What is the acceleration of the box?(b) What is the angular acceleration of the cylinder with respect toits center?Solution:Let the force between the box and the cylinder be f , the acceleration of the box be A to theright, and the acceleration of the cylinder be a to the right.
F � f = MA, (7.49)
f = ma, (7.50)
Rf = IA� a
R. (7.51)
The first two equations give F = MA+ma. The latter two equations give mR2a = I(A�a).They are combined to give
F = MA+ma = MA+mIA
mR2 + I=
✓M +
mI
mR2 + I
◆A, (7.52)
so
A =F
M + mI
mR2+I
=(mR2 + I)F
(M +m)I +MmR2, (7.53)
and
74

↵ =A� a
R=
mRF
(M +m)I +MmR2. (7.54)
The direction of A is to the right and that of ↵ is out of the paper.
Exercise: A spaceship of initial mass M moves in the x-direction by ejecting gasat the velocity v relative to the spaceship at the rate of mass k per unit time in the(�x)-direction. The velocity of the spaceship is xu0 at t = 0. (a) What is the velocityof the spaceship at a later time t (t > 0)? (b) What is the fictitious force Ffict(t) ona particle of mass m with respect to the spaceship’s rest frame?Solution:(a) The mass of the spaceship is
M(t) = M � kt. (7.55)
When the spaceship is at the velocity u(t),
d
dt(M(t)u(t)) = k(v � u(t)).
) M(t)u(t) = kv.
) u(t) =kv
M � kt.
) u(t) = u0 � v log(M � kt)|t0 = u0 + v log
✓M
M � kt
◆. (7.56)
The velocity is
u = x
u0 + v log
✓M
M � kt
◆�. (7.57)
(b) The fictitious force is
Ffict = �mu = �xmkv
M � kt. (7.58)
Exercise: A spool of mass M and radius R has an axle of radius raround which a string of negligible mass is wrapped. The momentof inertia about the center is I. The spool is placed on a wedgeof angle ✓ and pulled by the string with tension T . The coefficientof friction between the wedge and the spool is µ. (a) What is themaximal value of T for the spool to roll without slipping? (b) Fora given T , what is the angular frequency ! of the spool when thespool is pulled up from rest over a distance d along the slope?Solution:(a) The total force on the spool along the slope is related to the acceleration along the slope
75

via
T � f �Mg sin ✓ = Ma. (7.59)
The total torque on the spool is
rT +Rf = Id!
dt= I
a
R. (7.60)
The two equations above can be combined to remove a and solve T :
rT +Rf =I
MR(T � f �Mg sin ✓).
)✓R+
I
MR
◆f +
I
Rg sin ✓ =
✓I
MR� r
◆T.
) |f | =����(I �MRr)T � IMg sin ✓
MR2 + I
���� µMg cos ✓. (7.61)
Hence, when (I �MRr)T > IMg sin ✓, we have
T µ cos ✓(MR2 + I) + I sin ✓
I �MRrMg, (7.62)
assuming that I > MRr. On the other hand, when (I �MRr)T < IMg sin ✓, we have
T I sin ✓ � µ cos ✓(MR2 + I)
I �MRrMg, (7.63)
which assumes either I < MRr and I sin ✓ < µ cos ✓(MR2 + I), or I > MRr and I sin ✓ >
µ cos ✓(MR2 + I).(b) Approach 1:
Energy conservation has
Td⇣1 +
r
R
⌘=
1
2MR2!2 +
1
2I!2 +Mgd sin ✓, (7.64)
so
! =
s2d [(R+ r)T �MgR sin ✓]
R(MR2 + I). (7.65)
Approach 2:Use eqs.(11.98) and (11.99) to solve for
a =R
I +MR2[(R+ r)T �MgR sin ✓] . (7.66)
Then !2 = v2/R2 = 2ad/R2, which reproduces the same answer.
76

7.6 Statics Of Rigid Body
For a rigid body to be in static equilibrium, we must have
Ftot = 0, ⌧tot = 0. (7.67)
About static equilibrium:
1. There are 3 types of static equilibrium: stable, unstable, and neutral (marginallystable).
2. Whether a system is stable has to do with the time scale.
Gömböc: a uniform 3D objectwith only one stable and oneunstable equilibrium points.
Q: Is it possible to find something with no stable equilibrium point?
Example: Balancing a pencil on its tip.
Example: 3-legged table.
Example: Standing on ice in ice skates.
Exercise: A ladder leaning on a wall. (Degeneracy)Given the weight, length, angle, and the coefficients of static friction on the wall andon the floor, can we uniquely determine the physical state? What are the normalforces on the wall and on the floor?
Q: On a lever, what is the internal force at a point of distance r from the fulcrum?Is it inversely proportional to r?
Q: A rope hanging on two ends. (Catenary)
77

78