Chapter 14 Week 14. Non-Uniform Circular Motion · Chapter 14 Week 14. Non-Uniform Circular Motion...
32
Chapter 14 Week 14. Non-Uniform Circular Motion 14.1 Lecture - Non-Uniform Circular Motion In this lesson, we will study non-uniform circular motion using Newton’s Laws in an r✓ coordinate system. A two-dimensional r✓ coordinate system is sometimes called a “polar” coordinate system, while a commonly used three-dimensional r✓z coordinate system is called a cylindrical coordinate system. We employ both polar and cylindrical coordinates in this course. In later courses such as “Dynamics” and “Orbital Mechanics” you may use an alternative three-dimensional spherical coordinate system that employs a radius and two angular variables, r✓φ. The spherical coordinate system is commonly used for navigation around the surface of the Earth, or for space travel applications. In lecture this week, we will solve two problems: (Problem A) analysis of the motion of a single particle, P , in non-uniform circular motion through an arc of constant radius, r, and varying tangential speed, v(t), and (Problem B) analysis of the motion of a rigid body in non-uniform circular motion, comprised of an infinite number of discrete particles, rotating about an axis with varying speed. A rigid body is an object wherein all of the mass of the body is in a fixed location relative to the other mass of the body. For example, solid blocks of metal and wood are rigid bodies, since the mass remains in a constant relative position to the body, even when the entire body itself moves. Conversely, bodies of water are not rigid bodies, because the molecules of the water move relative to the other molecules in the body of water. During lab we will study the non-uniform circular motion case for a rigid body. During studio we will compare the laboratory data to the theoretical models developed during lecture and continue our skills development with the Matlab software environment by developing a model to integrate the first order simultaneous di↵erential equations describing the non- uniform motion. 431
Transcript of Chapter 14 Week 14. Non-Uniform Circular Motion · Chapter 14 Week 14. Non-Uniform Circular Motion...

Chapter 14
Week 14. Non-Uniform CircularMotion
14.1 Lecture - Non-Uniform Circular Motion
In this lesson, we will study non-uniform circular motion using Newton’s Laws in an r✓coordinate system. A two-dimensional r✓ coordinate system is sometimes called a “polar”coordinate system, while a commonly used three-dimensional r✓z coordinate system is calleda cylindrical coordinate system. We employ both polar and cylindrical coordinates in thiscourse. In later courses such as “Dynamics” and “Orbital Mechanics” you may use analternative three-dimensional spherical coordinate system that employs a radius and twoangular variables, r✓�. The spherical coordinate system is commonly used for navigationaround the surface of the Earth, or for space travel applications.
In lecture this week, we will solve two problems: (Problem A) analysis of the motion of asingle particle, P , in non-uniform circular motion through an arc of constant radius, r, andvarying tangential speed, v(t), and (Problem B) analysis of the motion of a rigid body innon-uniform circular motion, comprised of an infinite number of discrete particles, rotatingabout an axis with varying speed. A rigid body is an object wherein all of the mass of thebody is in a fixed location relative to the other mass of the body. For example, solid blocksof metal and wood are rigid bodies, since the mass remains in a constant relative position tothe body, even when the entire body itself moves. Conversely, bodies of water are not rigidbodies, because the molecules of the water move relative to the other molecules in the bodyof water.
During lab we will study the non-uniform circular motion case for a rigid body. Duringstudio we will compare the laboratory data to the theoretical models developed during lectureand continue our skills development with the Matlab software environment by developinga model to integrate the first order simultaneous di↵erential equations describing the non-uniform motion.
431

14.1.1 Problem A. Formulate
State the Problem
We are given a particle, P , moving in a circle having constant radius r. The tangentialspeed of the particle, v(t), changes with time. Develop expressions for the velocity, �!v (t),and acceleration, �!a (t), of the particle as a function of time in polar coordinates.
State the Known Information
r = Constant Known [m] � radius of motion of particle P (14.1)�!v tang(t) ⌘ v(t) Known [m/s] � non-uniform tangential speed of P (14.2)
State the Desired Information
�!v (t) = ? [m/s] ↵ velocity of P vs. time (14.3)�!a (t) = ? [m/s2] ↵ acceleration of P vs. time (14.4)
14.1.2 Problem A. Assume
dr
dt= 0 [m/s] � circular motion (14.5)
14.1.3 Problem A. Chart
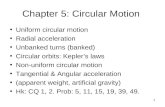
In our previous work on uniform circular motion, we used a cylindrical coordinate system,with radial and tangential components of displacement, velocity and acceleration. Buildingupon our prior work, consider the motion of a small particle, P , moving in a circular arcas shown in Figure 14.1. In our prior work, we assumed that the tangential speed of theparticle was constant for uniform circular motion. In this lesson, we allow the tangentialspeed, v(t), to be variable, but fix the radius of motion, r, as a constant. This is a variationof the case we studied in the previous lesson, when the system is speeding up or slowingdown. This special case of motion is also referred to as “rotary motion” since it is commonlyencountered when particles and rigid bodies rotate about a fixed axis.
This figure shows both our traditional x, y Cartesian coordinate system and an r, ✓ polar(or cylindrical) coordinate system. In both coordinate systems the third axis, z, would beperpendicular to and directed out of the page. We notice that in some problems we haveemployed the Greek letter theta, ✓ for angular displacement, while in other problems weused the Greek letter phi, �. In the future, when we work with three-dimensional systems,we will see that another Greek letter psi, , is also used for angular displacements. Just aswe have three common symbols for position displacement, x, y, and z, engineers often usethe three symbols ✓, � and for angular displacement.
432

Figure 14.1: Motion of a particle in non-uniform circular motion about the origin.
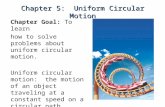
The relationship between the Cartesian and polar coordinate systems is illustrated inFigure 14.2. The angle ✓ and the distance s are measured from the positive x axis. The
Figure 14.2: Relationship between Cartesian and polar coordinate systems.
distance s is related to the polar coordinates r and ✓ by
s = r✓ Or, (14.6)
✓ =s
r(14.7)
We define the vector r to be a unit vector parallel to the position vector �!r and we define theunit vector ✓ to be perpendicular to �!r and tangent to the circle in the direction of increasing✓ and s.
433

14.1.4 Problem A. Execute
When the particle, P , is moving in a circular motion of constant radius, r, and varyingtangential speed, v(t), we can write
�!r = rr (14.8)
�!V = v(t)✓ =
ds
dt✓ = r
d✓
dt✓ (14.9)
From trigonometry we can write
x(t) = r cos ✓(t) [m] x position (14.10)
y(t) = r sin ✓(t) [m] y position (14.11)�!r (t) = r cos ✓(t)ı+ r sin ✓(t)| [m] Or, (14.12)
r(t) =�!rr
= cos ✓(t)ı+ sin ✓(t)| [�] And, (14.13)
✓(t) = � sin ✓(t)ı+ cos ✓(t)| [�] (14.14)
Unlike the Cartesian unit vectors ı and | which are time invariant, the polar coordinatevectors r and ✓ are dependent upon the current position of the particle, P . Thus, the unitvectors r(t) and ✓(t) change continuously as the particle P moves through its circular motion.We can compute the time rate of change of the unit vectors r(t) and ✓(t) by taking the firsttime derivatives of Equations 14.13 and 14.14 to compute the velocity and accelerationvectors for circular motion:
dr
dt=
d
dt(cos ✓(t)ı+ sin ✓(t)|)
= � sin ✓d✓
dtı+ cos ✓
d✓
dt|
=d✓
dt(� sin ✓ı+ cos ✓|) =
d✓
dt✓ (14.15)
d✓
dt=
d
dt(� sin ✓(t)ı+ cos ✓(t)|)
= � cos ✓d✓
dtı� sin ✓
d✓
dt|
= �d✓
dt(cos ✓ı+ sin ✓|) = �d✓
dtr (14.16)
Now that we have a solid understanding of the polar coordinate system, we can use thedefinition of the derivative to find the velocity and acceleration of the particle, P , movingin a circular path with constant radius, r. If we are given the position of the particle,�!r (t) = rr(t), as a function of time, we can take the first derivative to get its velocity vector:
�!V (t) =
d�!r (t)dt
= rdr
dt= r
d✓
dt✓ (14.17)
434

Recall that the radius of motion, r, is constant for a circular path, but that the unit vector,r(t), varies with time. Also, the time varying tangential speed, v(t), is related to the polarcoordinates by:
v(t) =ds
dt= r
d✓
dt(14.18)
In polar coordinates the velocity is given by
��!v(t) = v(t)✓ (14.19)
Since we know that both the speed v(t) and the unit vector ✓ vary with time, we usethe product rule of di↵erentiation to take the first derivative of Equation 14.19 to get anexpression for the acceleration of the particle, P , in polar coordinates:
��!a(t) =
d��!v(t)
dt= v(t)
d✓
dt+
dv(t)
dt✓(t) (14.20)
But, we can use Equation 14.16 in Equation 14.20 to write
��!a(t) = v(t)
�d✓
dtr +
dv(t)
dt✓ (14.21)
Now, if we recall that the tangential speed is related to the angular speed by d✓/dt = v/rfrom our previous work on uniform circular motion, then we can write Equation 14.21 as:
��!a(t) = �v2(t)
rr +
dv(t)
dt✓ (14.22)
14.1.5 Problem A. Test
Equation 14.22 is a very interesting result. If we limit ourselves to the case of uniform circularmotion, then v(t) = v, (constant) and dv(t)/dt = 0, and Equation 14.22 reduces to thefamiliar expression previously developed for centripetal acceleration! When v(t) 6= Constant,then the acceleration has two components: the centripetal acceleration due to the changingdirection of particle P and the tangential acceleration due to the changing speed of particleP !
14.1.6 Problem B. Formulate
State the Problem
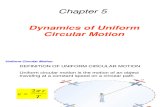
Consider the experimental apparatus shown in Figure 14.3. A flywheel is a�xed to a free-wheeling shaft, which in turn has an encoder attached. The encoder, used previously in ourpendulum experiment, can be used to measure the angular position of the shaft upon whichthe flywheel is attached. The flywheel is a cylindrical mass that can be used to study the
435

non-uniform rotational motion of rigid bodies. Wrapped around the outer circumference ofthe flywheel is a cable, much in the way that fishing line is wrapped around the spool of afishing reel, or that sewing thread is wrapped around a spool. The free end of the cable isattached to a dead weight. We will use our pendulum bobs as the flywheels, the pendulumshaft as the rotary encoder assembly, and the masses from our Hooke’s Law experiment asthe dead weight. At time zero, the dead weight is released from rest, and allowed to falltoward the center of the Earth due to the action of gravity. Determine the vertical position,velocity and acceleration of the dead weight as a function of time as well as the angularposition, velocity, and acceleration of the flywheel as a function of time.
State the Known Information
A schematic diagram of the system is presented in Figure 14.4. The following informationis provided for the configuration of the apparatus.
m1
= Known [kg] � flywheel mass (14.23)
R1
= Known [m] � flywheel inner radius (14.24)
R2
= Known [m] � flywheel outer radius (14.25)
m2
= Known [kg] � dead weight mass (14.26)
Z2
= Known [m] � initial height of dead weight (14.27)
We will also specify that the deflection angle, ✓, of the flywheel can be experimentallydetermined in the lab, by interpreting the encoder count as a function of time. Recall thatour encoder generates count = 2880 [counts/revolution].
✓(t) = Measured in Lab [counts] � flywheel angle displacement (14.28)
count = 2880 [counts/rev] � encoder resolution (14.29)
State the Desired Information
It is sometimes convenient to denote the first time derivative of a variable with a single “dot”over the name of the variable, and the second time derivative of a variable with a double “dot”over the name of the variable. This convention is used frequently in engineering textbooks,and so we introduce it here:
Z(t) = ? [m] ↵ vertical displacement of m2
vs. time (14.30)
Vz(t) = Z(t) = ? [m/s] ↵ vertical velocity m2
vs. time (14.31)
az(t) = Z(t) = ? [m/s2] ↵ vertical acceleration of m2
vs. time (14.32)
✓(t) = ? [rad] ↵ angular displacement of m1
vs. time (14.33)
!(t) = ✓(t) = ? [rad/s] ↵ angular velocity of m1
vs. time (14.34)
↵(t) = ✓(t) = ? [rad/s2] ↵ angular acceleration of m1
vs. time (14.35)
436

14.1.7 Problem B. Assume
We will assume in this analysis that the cable is wound around the flywheel such that theflywheel rotates in the clockwise direction, while the positive ✓ angle is measured in thecounterclockwise direction.
✓(t) < 0 [rad] � negative angular displacement of m1
vs. time (14.36)
We will neglect all friction e↵ects in the system for this analysis. This includes air frictionand bearing friction (in the flywheel bearing). We will neglect the mass of the flywheel driveshaft and collars in comparison to the mass of the flywheel itself.
�!F f (t) ⇡ 0 [N ] � neglect friction (14.37)
m1
>> mshaft [kg] � neglect shaft mass (14.38)
14.1.8 Problem B. Chart
The apparatus that we will use in Lab and analyze here is illustrated in Figure 14.3. Thependulum shaft, mounting brackets, bearing supports and shaft encoder are mounted tothe upright of the lab station as illustrated in the photograph. We use one or both of thecircular masses (steel and aluminum) are both available that were previously employed asthe pendulum bob. this time, we use the circular mass as a flywheel (a flywheel is a rotatingmass used to store rotational kinetic energy) a�xed to the pendulum shaft. We tape a stringto the outer circumference of the flywheel as illustrated in the photograph, and then attacha dead weight to the free end of the string. The dead weights are also familiar – we usedthem in the spring mass oscillation experiment and our Hooke’s Law experiment previously.A schematic diagram of the apparatus is illustrated in Figure 14.4. We use a Cartesiancoordinate xy system (lower case) whose origin is at the axis of the flywheel shaft, alongwith an r✓ polar coordinate system for the flywheel, m
1
. The positive z axis is directed outof the page in accordance with the right hand rule for coordinate system definition. We alsouse a second Cartesian XZ coordinate system (upper case), defined such that Z = 0 at thefloor of the room, and X = 0 centered below the dead weight, m
2
. The positive Y axis isdirected into the page, to preserve our right hand rule sign convention. As the dead weightm
2
is released from rest, it moves downward due to gravity. The cable unwinds from thecircumference of the flywheel. The dead weight accelerates under the action of gravity, ata rate less than it would have experienced in free fall, since the dead weight also needs toaccelerate the flywheel m
1
in rotary motion. We assume that the cable does not stretch, butthat the length of the cable increases as it unwinds from the circumference of the flywheel.We will analyze the motion from the instant after the dead weight is released from its initialheight Z
0
until just before the dead weight reaches the floor at Z = 0.Free body diagrams for the flywheel and the dead weight are presented in Figure 14.5.
The flywheel has three forces acting on it. First, the cable exerts a downward force due tothe tension in the cable, �T |. The second force is the downward force (the weight of m
1
) due
437

Figure 14.3: Photograph and solid model of laboratory apparatus.
Figure 14.4: Schematic diagram of laboratory apparatus.
438

Figure 14.5: Free body diagrams of flywheel and dead weight.
to the local acceleration of gravity near the surface of the Earth, directed towards the centerof the Earth, W
1
= �m1
g|. The third force acting upon the flywheel is the reaction forcebetween the flywheel shaft and m
1
. The flywheel shaft prevents the flywheel from falling tothe floor. The reaction force exerted by the shaft upon the flywheel is denoted as +F | andit acts in the upward +| direction. While we have not drawn an FBD for the flywheel shaft,we must note that the flywheel exerts an equal and opposite force upon the shaft, directedin the downward �| direction. The dead weight has two forces acting upon it. First, thecable exerts an upward force due to the tension in the cable, +TK. The second force is thedownward force (the weight of m
2
) due to the local acceleration of gravity near the surfaceof the Earth, directed towards the center of the Earth, W
2
= �m2
gK. Notice that we usethe xy coordinate system for m
1
and the XZ coordinate system for m2
. While we have notdrawn an FBD for the Earth, we note that the flywheel exerts an equal and opposite forceupon the Earth, directed in the upward +W
1
| direction and that the dead weight also exertsan upward force upon the Earth +W
2
K direction. Thus, we have demonstrated that ourFBDs satisfy Newton’s Third Law. This is a crucial observation! We must always verifythat our FBDs contain equal and opposite forces. If our FBDs fail to satisfy Newton’s ThirdLaw, then our analysis cannot be correct.
Two additional views of the apparatus are presented in Figure 14.6. Numerous compo-nents of this assembly rotate about the centerline of the shaft. The shaft itself is made ofstainless steel. The encoder contains some rotary and many stationary parts. The flywheelis attached to the shaft with two collars made of steel, both of which rotate. A third collar isused to retain the shaft in the assembly. Two rubber O-Rings are used between the collarsand the flywheel to ensure that the flywheel rotates with the shaft rather than spinningfreely. Each bearing contains 14 balls, and there are two bearings, so there are a total of28 balls that rotate about the shaft axis, along with the inner rotating raceway that retainsthe balls in the bearing. Figure 14.6 shows only a single flywheel attached to the shaft.However, the solid model in Figure 14.3 illustrates a configuration with both an aluminumand a steel flywheel attached to the shaft. A variety of configurations are possible for thelaboratory experiment. It is essential that an accurate record is created to reflect the actualconfiguration used when collecting experimental data.
439

Figure 14.6: Flywheel mounted on shaft with encoder.
14.1.9 Problem B. Execute
Recall the governing equations:
If :X�!
F = 0 Then : �!a = 0 Newton’s 1st Law (14.39)
X�!F =
d(m�!V )
dtNewton’s 2nd Law (14.40)
�!F Action = ��!
F Reaction Newton’s 3rd Law (14.41)�!F g = g ·m # Newton’s Law of Gravity near Earth (14.42)
�E = E2
� E1
= Q1!2
�W1!2
work energy theorem (14.43)
We will employ a Cartesian XZ coordinate system for the dead weight. We used Newton’sThird Law to develop the free body diagram for dead weight. For the dead weight:
XFZ = +T �m
2
g vertical forces from FBD (14.44)X
FX = 0 horizontal forces from FBD (14.45)
The tension in the cable must be equal and opposite to the force applied to the flywheel.The tension in the cable is generally not equal to the weight of the mass m
2
since we knowthat the mass is moving. Since there are no net horizontal forces, we do not expect motionin the X direction. To begin our analysis, let’s use another Cartesian xy coordinate systemfor the flywheel. From Newton’s third law and the free body diagram for the flywheel, wecan write:
XFy = +F � T �m
1
g vertical forces from FBD (14.46)X
Fx = 0 horizontal forces from FBD (14.47)
440

Since there are no net horizontal forces, we do not expect motion in the x direction. Also, inthe vertical, y, direction, we do not expect the center of mass of the flywheel to move. Thatis, the assembly remains fixed at a constant elevation above the surface of the Earth. Sincethe flywheel does not translate vertically, we expect the shaft to exert an upward force uponthe flywheel to balance the weight of the flywheel and the tension in the cable:
F = +T +m1
g vertical reaction force when a1
= 0 (14.48)
This simple analysis of the FBDs suggests that all of our forces on the flywheel are in “bal-ance” which should indicate a condition of static equilibrium. But, we know from experiencethat motion will occur. What are we missing? In order to understand the motion in thissystem we need to take a deeper look into the flywheel and its FBD. The reaction force Fand the weight W
1
= m1
g both act through the centerline axis of rotation of the flywheel.The tension T does not act through the centerline. All three of these forces collectivelyinhibit the y translational motion of the flywheel. The FBD at first glance suggests thatthat flywheel will not move. And, true, it will not “translate.” However, it will “rotate.”The tension T acts a distance R from the centerline of the flywheel. The angle between aline extending from the centerline of the flywheel to the contact point of the cable is 90�.The perpendicular distance between the line of action of a force and the resulting axis ofrotation is called the “moment arm.” A “linear force,” T , acting through a “moment arm,”R
2
, is defined as the “torque.” ⌧ :
⌧ ⌘ TR2
applied torque (14.49)
[Nm] = [N ][m] units
The torque causes a rotation about the z axis. Torque has units of force, [N ], times distance,[m]. This torque indeed causes motion, but not translational motion. Instead, it causesrotary motion. We need to study this rotational motion in more detail. from our priore↵orts related to the work and energy theorem, we know that the kinetic energy, KE, of anobject is defined as
KE ⌘ 1
2mV 2 kinetic energy (14.50)
[Nm] =[�]
[�][kg][m/s]2 units
Interestingly, the units of energy appear the same as the units of torque. Consider theflywheel as shown in the previous figures. While the flywheel is not translating throughspace, it will rotate about its axis. Thus, the mass contained within the flywheel will rotatewith some speed about the centerline. To illustrate this concept, refer to Figure 14.1. If theparticle P has some di↵erential mass �m, and is a particle contained in a rigid flywheel,then particle P and all of the other mass particles in the flywheel are constrained to rotatein unison. If the flywheel rotates through some angle �✓ during a small interval of time, �t,
441

then the arc length, �s, that particle P will move through is fixed by geometry:
�s = r�✓ small displacement (14.51)
[m] = [m][radians] units
Or, dividing though by �t and taking the limit as �t ! 0, we can write:
lim�t!0
�s
�t= r lim
�✓!0
angular speed (14.52)
[m]
[s]= [m]
[radians]
[s]units
Clearly, the tangential speed of particle P depends upon the angular rotational speed of theflywheel and the distance that particle P resides from the origin. We define the angularspeed, !, and the angular acceleration, ↵, as the first and second time derivatives of angularposition, ✓.
! ⌘ d✓
dtangular speed (14.53)
[rad/s] =[radians]
[s]units
↵ ⌘ d!
dt=
d2✓
dt2angular acceleration (14.54)
[rad/s] =[rad/s]
[s]=
[radians]
[s2]units
Using these definitions we can then relate the tangential displacement, velocity and acceler-ation of particle P to its angular displacement, speed and acceleration with:
s = r✓ displacement (14.55)
[m] = [m][rad] units
v = r! speed (14.56)
[m/s] = [m][rad/s] units
a = r↵ acceleration (14.57)
[m/s2] = [m][rad/s2] units
Clearly, those particles, P , which are closer to the centerline of the flywheel will have asmaller tangential speed, while those particles near the outer edge of the flywheel will havea larger tangential speed. However, all of the particles will move with a uniform angularspeed! Since kinetic energy is proportional to the square of the speed, then those particlesnear the outer edge of the flywheel will store larger kinetic energy than those particles nearthe centerline of the flywheel. Consider the di↵erential annular segment of the flywheel shownin Figure 14.7 The di↵erential volume of the small annular element, dV , is the circumference
442

Figure 14.7: Di↵erential annular element of a flywheel.
of the element, 2⇡r, times the di↵erential radial length of the element, dr, times the axiallength of the flywheel, h:
dV = 2⇡rdrh di↵erential volume (14.58)
[m3] = [�][rad][m][m][m] units
The di↵erential mass of the small annular element, dm, is the di↵erential volume of theelement, dV , times the density of the material that the flywheel is made of, ⇢:
dm = ⇢dV = ⇢(2⇡r)drh di↵erential mass (14.59)
[kg] =[kg]
[m3][m3] =
[kg]
[m3]([�][rad][m])[m][m] units
The di↵erential kinetic energy of the small annular element, d(KE), is 1/2 times the di↵er-ential mass of the element, (dm), times the square of its speed, v2:
d(KE) =1
2(dm)v2 =
1
2
(dm)z }| {0
B@⇢ (2⇡r)drh| {z }(dV )
1
CA v2 di↵erential KE (14.60)
[Nm] = [�][kg]hms
i2
= [�]
✓[kg]
[m3]([�][rad][m])[m][m]
◆hms
i2
units
443

The total kinetic energy of the flywheel can be obtained by integrating the contributions ofeach di↵erential element from the inner radius of the flywheel, R
1
, to the outer radius of theflywheel, R
2
:
KE =
Z r=R2
r=R1
d(KE) total KE (14.61)
[Nm] =
Z r=R2
r=R1
[Nm] units
Now, we can use the definition of the di↵erential kinetic energy, d(KE), from Equation 14.60and the speed from Equation 14.56 in Equation 14.61 to write:
KE =
Z r=R2
r=R1
⇢(⇡r)drh(r2!2) total KE
= ⇡⇢!2h
Z r=R2
r=R1
r3dr rearrange KE (14.62)
[Nm] = [�][rad][kg]
[m3]
✓[rad]
[s]
◆2
[m]
Z[m]3[m] units
We remind ourselves that [rad] are actually a pure dimensionless number, and thus our unitsbalance properly. Now, we can evaluate the integral between its upper and lower limits:
KE = ⇡h⇢
✓r4
4
◆����r=R
2
r=R1
!2 evaluate integral
= ⇡h⇢
✓R4
2
4� R4
1
4
◆!2 apply limits
= ⇡h⇢
✓R2
2
2� R2
1
2
◆✓R2
2
2+
R2
1
2
◆!2 factor term (14.63)
However, the mass of the annular flywheel, m1
, is equal to the density of the material timesthe cross sectional area of the flywheel times it axial length:
m1
= ⇡h⇢�R2
2
�R2
1
�flywheel mass (14.64)
[kg] = [rad][m][kg]
[m3]
�[m]2 � [m]2
�units
Using the known mass of the flywheel from Equation 14.64 in the KE Equation 14.63 wecan write:
KE =1
2m
1
✓R2
2
+R2
1
2
◆!2 flywheel KE (14.65)
444

Now, we introduce a new term. The “Moment of Inertia about the z axis”, Iz, is defined interms of the mass and geometry of the flywheel:
Iz ⌘ m1
✓R2
2
+R2
1
2
◆moment of inertia (14.66)
We use the definition of the moment of inertia as given by Equation 14.66 in Equation 14.65to write
KE =1
2Iz!
2 flywheel KE (14.67)
Thus, we see that the usage of “mass” in linear translational systems is analogousto the usage of “moment of inertia” for rotational systems! This is an importantresult with many intuitive implications that we should remember throughout our study ofmechanical engineering. Using this very strong mathematical analogy, we can now writeNewton’s Law’s of Motion for Rotational Systems as:
If :X
⌧ = 0 Then : ↵ = 0 Newton’s 1st Law of Rotation (14.68)X
⌧ = I↵ Newton’s 2nd Law of Rotation (14.69)
⌧Action = �⌧Reaction Newton’s 3rd Law of Rotation (14.70)
Newton’s First Law of Rotation states that “a body at rest will remain at rest unless actedupon by a net torque.” Newton’s Second Law of Rotation states that “a net torque exertedupon a body having a moment of inertia will result in an angular acceleration.” Newton’sThird Law of Rotation states that “for every torque their is an equal and opposite torque.”
Now that we have developed an expression for the moment of inertia for the flywheel andwe have expressions for Newton’s Second Law for the rotating flywheel, we can write:
�TR2
= Iz↵1
Newton’s 2nd Law of Rotation for the Ffywheel (14.71)
+T �m2
g = m2
a2
Newton’s 2nd Law for the dead weight (14.72)
a2
= R2
↵1
kinematic constraint between flywheel and dead weight (14.73)
The mass of the dead weight, m2
, the moment of inertia for thee flywheel, I, the outerradius of the flywheel, R
2
, and local acceleration of gravity, g, are known quantities. Thecable tension, T , vertical acceleration of the dead weight, a
2
, and angular acceleration of theflywheel, ↵
1
, are unknown. We thus have three equations and three unknowns. The tensioncauses a negative angular acceleration of the flywheel. We solve Equation 14.71 to determinethe tension in terms of the other variables:
T = �Iz↵1
R2
tension (14.74)
Now, use Equation 14.74 in Equation 14.72 to get:
�Iz↵1
R2
�m2
g = m2
a2
Newton’s 2nd Law for the dead weight (14.75)
445

Next, we rearrange Equation 14.73 to get
↵1
=a2
R2
kinematic constraint (14.76)
Now, Use Equation 14.76 in Equation 14.75 and rearrange:
� IzR
2
a2
R2
�m2
g = m2
a2
combined equation (14.77)
� IzR2
2
a2
�m2
a2
= m2
g combined equation (14.78)
a2
= �✓
m2
(Iz/R2
2
) +m2
◆g vertical acceleration (14.79)
The vertical acceleration of mass m2
is constant, and directed toward the center of the Earth.
14.1.10 Problem B. Test
As the moment of inertia of the flywheel is increased, the vertical acceleration of m2
isreduced. The units are correct.
446

14.2 Lab - Non-Uniform Circular Motion
14.2.1 Scope
This week you will investigate the principles of non-uniform circular motion (circular motionwith angular acceleration) by observing and quantifying the dynamic motion of a flywheelsystem. The system is comprised of the cylindrical masses and encoder device used previouslyfor the pendulum investigation, re-arranged.
14.2.2 Goal
The goals of this laboratory experiment are to: The goals of this laboratory experiment areto
1. use an encoder system for transient angular motion analysis, and
2. begin to understand the physics of non-uniform circular motion.
14.2.3 Units of Measurement to Use
All reports shall be presented in the SI system of units. Raw data may be collected in avariety of units.
Table 14.1: Units of measurement to be used for non-uniform circular motion system.Quantity Basic units Derived units
Mass [kg] [kg]Time [s] [s]Length [m] [m]Velocity [m/s] [m/s]
Acceleration [m/s2] [m/s2]Angle [radians] [radians]
Angular Speed [rad/s] [rad/s]Angular Acceleration [rad/s2] [rad/s2]
14.2.4 Reference Documents
Refer to the lab videos for this week for all information regarding the proper installation anduse of all equipment and software resources.
14.2.5 Terminology
The following terms must be fully understood in order to achieve the educational objectivesof this laboratory experiment.
447

Displacement Velocity SpeedAcceleration Radial TangentialCentripetal Circumferential AngularPeriod Angle FrequencyBearing Radians Count
14.2.6 Summary of Test Method
On the myCourses site for this course you will find links to one or more videos on YouTubefor this week’s exercise. Watch all of the available videos, and complete the online lab quizfor the week. The videos are your best reference for the specific tasks and procedures tofollow for completing the laboratory exercise.
14.2.7 Calibration and Standardization
By now in this course, students should be in a position to conduct independent calibra-tions of hardware, and properly configure the use of all hardware, without having detailedinstructions.
As noted in the previous investigation with the pendulum, the encoder device is treatedas a primary instrument as is not calibrated. However, in that investigation, it was necessaryto assign a zero-position of the pendulum when it was hanging still, vertically oriented. Theprocess for the current investigation does not require a similar zeroing of position, and thecapability is therefore not provided in the software interface (which is similar to, but not thesame as that which was used previously for the pendulum).
14.2.8 Apparatus
All required apparatus and equipment components are described and demonstrated in theinstructional videos for this exercise, or will be familiar from common or previous use. Referto previous figures in this chapter for illustrations of the basic experimental apparatus,schematics, and definitions of terms used.
14.2.9 Measurement Uncertainty
The encoder device used for this investigation is capable of representing each full revolutionof its shaft with 2048 digital pulses that are captured by the control electronics and thesoftware program that interfaces to the system. Therefore, knowing that each revolutionis 360[�] and treating the device as a primary instrument, the least count of the rotationalposition measurement (the encoder) becomes 360[�]/2048 = 0.176[�]. In turn, the uncertaintyof the encoder as a primary instrument is then taken to be:
✏encoder = ±1
2ILCencoder ⇡ ±1
20.176[degrees] ⇡ ±0.089[degrees] (14.80)
448

14.2.10 Preparation of Apparatus
All required equipment for conducting the laboratory exercise is made available either withinone or both of the drawers attached to the lab bench, or available from the laboratory instruc-tor. You are expected to bring all other necessary materials, particularly your logbook and aflash drive for storing electronic data as appropriate. You are to follow the general specifica-tions for team roles within the lab. Although there are specific, individual expectations foreach role, you are each responsible overall to ensure that the objectives and requirements ofthe laboratory exercise are met, and that all rules and procedures are followed at all times,especially any that are related to safety in the lab. When finished, all equipment is to bereturned to the proper location, in proper working order.
14.2.11 Sampling, Test Specimens
The basic apparatus for the flywheel system has two parameters that can be changed: thenumber and selection of cylindrical masses added to the shaft (three di↵erent arrangementspossible), and the amount of mass added to the string that “unwinds” and accelerates thesystem. Of all of the resulting possible variations in the system, every group member shouldselect at least two di↵erent combinations to operate the system and make the correspondingmeasurements. As always, it is recommended that several trials be conducted at each uniquesetting to ensure that valid data sets are obtained.
14.2.12 Procedure - Lab Portion
Record all observations and notes about your lab experiment inyour logbook.
The instructional videos for this exercise cover the specific procedures to follow as you setup the apparatus to make measurements, and for actually collecting data with the variousdevices and software interfaces. More generally, you should always observe the followinggeneral procedures as you conduct any of the exercises in this laboratory.
1. Come prepared to lab, having watched the videos in detail, then completing the asso-ciated lab quiz and preparing your logbook before you arrive to class.
2. Follow the basic outline of elements to include in your logbook related to headers,footer, and signatures.
3. As you conduct the exercise, please pay attention to the following safety concerns:
• Watch for tripping hazards, due to cables and moving elements.
• Watch for pinch points, during assembling and disassembly.
449

• Be careful of shock hazards while connecting and operating electrical components
4. Every week, for every exercise, your logbook will minimally contain background notesand information that you collect before the lab, at least one schematic of the apparatus,various standard tables for recording the organization of your roles and equipmentused, the actual data collected and/or notes related to the data collected (if doneelectronically for instance), and any other information relevant to the reporting andanalysis of the data and understanding of the exercise itself.
5. All students should create and complete a table indicating the sta�ng plan for theweek (that is, the roles assumed by each group member), as shown in Table 1.2.
6. All students should create and complete a table listing all equipment used for the exer-cise, the location (from where was it obtained: top drawer, bottom drawer, instructor?)and all identifying information that is readily available. If the manufacturer and se-rial number are available, then record both (this would be an ideal scenario). If not,record whatever you can about the component. In some, cases, there will be no specificidentifying information whatsoever either because of the simplicity of the component,or because of its origin. In these cases, just identify the component as best you can,perhaps as “Manufactured by RITME.” The point here is to give as much informationas possible in case someone was to try to reproduce or verify what you did. Refer toTable 1.3.
7. For the Lab Manager only: create a key sign-out/sign-in table for obtaining thekey to the equipment drawers, as shown in Table 1.4.
8. All students should create a table or series of tables as appropriate to collect his/herown data for the exercise, as well as any specific notes related to the data collectionactivities. In those cases where data collection is done electronically, there may not beany data tables required.
9. Many of the laboratory exercises will require the use of a specific software interfacefor measurements and/or control. In all cases, these will be made available on themyCourses site unless stated otherwise.
10. The Scribe (or a designated alternative) should take a photo of each group memberperforming some aspect of the laboratory exercise for inclusion in the lab reportthat will be generated during the studio session. Refer to the example lab report formore details.
11. Record all relevant data and observations in your logbook, even those that may nothave been explicitly requested or indicated by the textbook or videos. If in doubtabout any measurements, it is better to make the measurement rather than not.
450

12. When you are finished with all lab activities, make sure that all equipment has beenreturned to the proper place. Log out of the computer, and straighten up everythingon the lab bench as you found it. Put the lab stools back under the bench and out ofthe way.
13. Prepare for the upcoming studio session for the week by carefully read and understandsub-Section 3 of the textbook, and complete the Studio pre-work prior to your arrivalat Studio.
Before leaving the lab, be sure you have measured and recorded values for the inner andout diameters of the flywheels, the flywheel masses, and the length of the from the end ofthe dead weight to the contact point with the tape on the flywheel.
451

14.3 Studio - Matlab Simulation of Non-Uniform Cir-cular Motion
This week in Studio you will write a Matlab script to extract the portion of the data set thatcorresponds to the initial drop of the dead weight from its maximum elevation to its lowestpoint, before the flywheel lifts the deadweight back up again. Then, plot the original data andthe subset of data to confirm that your extraction is correct. Next, compute the cumulativecircumferential flywheel displacement (and the corresponding vertical displacement of thedeadweight) from the angle data. Plot the cumulative displacement as a function of time.Finally, compare the maximum displacement with the string length measured in lab.
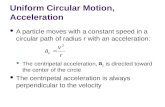
As you have observed in lab, the flywheel causes the dead weight to oscillate after itsinitial descent. The complete experimental data set is illustrated in Figure 14.8. Your taskis to use appropriate logic to extract ONLY the data that corresponds to the initial descent,which is the data to the left of the vertical dashed red line in this example data set. Inviewing the plots in this figure, it is clear that the initial descent of the dead weight is asmall fraction of the complete data set.
The flywheel is initially wound by hand, with the mass and cable around the flywheel.As the mass is allowed to drop, the counts decrease, representing the motion of the system.Let’s imagine that this descent takes places as a clockwise (CW) rotation, depending uponthe lateral viewing angle that you observe the motion from. The decrease in the counts up toapproximately 2.5[s] represents CW rotation of the flywheel as the deadweight approachesits minimum elevation as seen in the bottom plot of the figure. We observe that the flywheelcontinues to rotate in the CW direction beyond the vertical red line up to the green dashedline. This suggests that the flywheel has progressed beyond the minimum elevation and isactually lifting the deadweight back up toward the flywheel as the cable is spooled around theflywheel in the opposite direction. At the bottom of the “valley” in the Counts curve (greendashed line), the flywheel has reached its maximum CW displacement where it briefly comesto rest and then reverses direction, rotating now in the counter-clockwise (CCW) direction.The CCW rotation continues until the next “valley” in the Counts data at approximately 12seconds. The peak angular displacement continues to decrease with each cycle, representingthe frictional decay of the system. There is quite a bit happening in this physical system!
14.3.1 Calculation and Interpretation of Results
The equations needed for Studio this week were derived in the lecture portion of the text. Be-low is a brief summary of the key relationships that are needed for this analysis of centripetalacceleration.
✓ = Count2⇡
2048experimental angle (14.81)
[rad] = [count][rad]
[count]units
452

Figure 14.8: Plots of a typical nonuniform circular motion experiment showing the behaviorof the system over time.
s = R2
✓ experimental displacement (14.82)
[m] = [m][rad] units
! = d✓dt angular velocity (14.83)
[rad]/[s] = [rad]/[s] units
! ⇡ ✓i+1
� ✓i�1
ti+1
� ti�1
central di↵erencing method (14.84)
14.3.2 Procedure - Studio Portion
Studio Pre-work
Prior to arriving at Studio, each student should have acquired the necessary data in lab,recorded data in your notebook and stored data on a thumb drive. You should also have a
453

corresponding schematic that clearly identifies where each measurement was made in sym-bolic notation. You will need to know the flywheel outer radius, R
2
, the string length L,and the dead weight mass m
2
for each data set.In addition, please complete steps 1-6 prior to coming to studio. You may
type your script into a text file using a simple text editor (such as Notepad) if you don’thave MATLAB on your own computer. Note that the software can be downloaded forfree following the instructions on the home page of our myCourses site. You will need toeventually run the code in MATLAB to debug it. You will receive a quiz grade based on thecompleteness of your submission.
14.3.3 Non-Uniform Circular Motion Data Plotting
1 CREATE A SCRIPT FILE: from within the Matlab environment, use the pull-downcommand to execute “File - New - Script.” After the script editor window opens, usethe pull down command to execute “File - Save As” and save this file to your thumbdrive, in a folder named studio14 and a file named Lastname nonuniform circular motion.m.
2 CREATE A TITLE BLOCK: In the script editor window, create a title block for yourcomputer simulation program. In the ME department, your title block should alwaysinclude the name of the author, the academic term, the name of the course, and adescriptive title. You may add comments to explain the use and limitations of yourscripts. Over your career, as you develop a library of scripts, this will be an importantway for you to build upon previous knowledge. In Matlab, the special character %is used to indicate that any text on the current line to the right of the character isconsidered a comment, and is not considered a command to Matlab. It is good practiceto start each script with commands to clear all variables from workspace memory, andto clear the contents of the command window.
% Example program for MECE-102% This program is not intended to be copied electronically% Students may manually re-type this script to help learn matlab% Any text (like this) following a percent sign is a comment
% Plotting of Non-Uniform Circular Motion Data
clear % clear up the workspace, removing old junk from memoryclc % clear command window
3 CREATE A LIST OF KNOWN INFORMATION: In the script editor window, createa number of scalar variables that contain known information.
% Define the Encoder relationship and geometry
454

CPerRev = 2048; % [count/revolution]RadPerC = 2.0 * pi / CPerRev; % [rad/count]Radius = 1.5 ; % [in] Flywheel radius
4 READ THE EXPERIMENTAL DATA: Verify that your raw data is in the correct (tabdelimited) format, with the appropriate column headers at the top of each column ofdata. Then, modify the Matlab code so that it points to the path and name of yourraw data file. You will need to put the data file in the same directory as your scriptto have the tdfread function recognize the filename. If you are have trouble havingthe tdfread function read your text file, then simply type “tdfread;”, which will bringup the open file dialog when you run the code. You can then find the text file forMATLAB.
% READ THE EXPERIMENTAL DATA% read the file and echo a summary of the data to the screen% place the path and filename of your file inside the quotes below% Please include the text field ’TimeData’ in Row 1 Column A% Please include the text field ’EncoderData’ in Row 1 Column B% The first column contains time, in [s]% The second column contains encoder data, in [counts]tdfread(’c:\temp\AlFlywheel25gm.txt’)
% Upon completion of the line above, two arrays will be filled.% TimeData will contain the raw experimental time in [s]% EncoderData will contain the raw encoder data in [counts]
Note that the flywheel was supposed to be wound such that the initial Count value isat its maximum value and decreases initially with time. Either run the script at thispoint to get the array loaded into the Workspace or open the text file and check to seethat this is the case. If you see that your data is starting at a minimum count valueand increasing with time, then add the following lines of code to invert the Count dataarray. Only use these lines if your values of Count are increasing initiallyinstead of decreasing.
% The following line will invert the Count data:Count = -1*(Count - mean(Count)) + mean(Count);
5 FIND THE POINT WHERE THE FLYWHEEL IS DEFINITELY MOVING: Depend-ing of how you timed the start of data collection with letting go of the flywheel, theremay be a few initial Count points where their values are not changing. Write a simpleconditional while loop as shown below to test for when successive values of Count aredecreasing by at least 0.1 percent.
455

i = 1; % Search for point where Count first decreases by at least 0.1 %while abs(Count(i+1)-Count(i))<0.001*Count(i)
i = i + 1;endiStart = i; % Define initial index
6 FIND POINT OF FIRST DEADWEIGHT MINIMUM: Ultimately, you will be creat-ing a series of plots like the ones shown in Figure 14.9. To do this, you will need tofind the point in the data series corresponding to the first time the deadweight reachesits minimum elevation. It will probably be helpful to refer back to Figure 14.8 and thediscussion at the beginning of the Studio section. To do this task you will need to usethe expressions shown at the beginning of the Studio section to convert the Countsarray into and Angle one. Then, use central di↵erencing to calculate the angular ve-locity using the Angle and Time data arrays. A conditional loop can be used to testthe angular velocity data array until consecutive values of its absolute value are foundto be decreasing in magnitude. This will represent the first inflection in the angle vs.time data. Remember that MATLAB uses variables as arrays, which makes it verysimple to calculate something like the Angle array once the Count array is defined. So,something like the following can be used to calculate the Angle array:
% The following line calculates the Angle data arrayAngle = Count*RadperC;
Set up a for loop to calculate the Omega array using central di↵erencing. We needto also calculate the initial and final values of Omega using forward and backwarddi↵erencing, respectively so that the Omega array has the same number of elementsas the other ones.
start this loop at i = 2 and end at i = NCount � 1 to allow for the fact that thecentral di↵erencing method has to begin at the second row of data and end at thesecond-to-last row.
Omega(1) = (Angle(2)-Angle(1))/(TimeData(2)-TimeData(1));Omega(NCount) = (Angle(NCount)-Angle(NCount-1))...
(TimeData(NCount)-TimeData(NCount-1));for i=2:NCount-1
Omega(i) = (Angle(i+1)-Angle(i-1))/(TimeData(i+1)-TimeData(i-1));end
Once you have Omega defined, write a while loop to scan through the array looking forthe first instance where successive values of omega decrease in magnitude. Referringto the third plot of Figure 14.8, this is seen at about 2.5[s]. See if you can developthis loop using what you have learned about MATLAB so far and referring to other
456

code you have written. You need to use a while loop with the appropriate conditionaltest involving successive values of Omega. You should define the counter variable i asiStart before the while loop. Add a line in the while loop that adds 1 to i for eachiteration of the loop. Once the while loop detects the point where Omega starts goingto smaller negative values, this will correspond to the inflection point. Use this valueof i to define the end index, end angle, and end displacement. We will review this stepin Studio and then complete the rest of the script.
Figure 14.9: Example plots for non-uniform circular motion analysis. (Kody Kubrin, MECE-102, Fall Semester 2013).
EXTRACT THE RELEVANT DATA: Now that the endpoint has been identified forthe data range of interest, use this index to define results arrays for T ime,Angle, Omega,and Displacement. For example, one would write the following to define the resultsfor T ime called subT ime meaning it is a subset of the T ime array:
subTime = TimeData(iStart:iEnd);
457

Write similar lines for the other arrays. Also, write lines of code to define the maximumdisplacement of the dead weight from the flywheel and the angle of the flywheel at thatpoint.
7 PLOT THE RELEVANT DATA: Write a Matlab program to plot three graphs in asingle figure. In the upper plot, present the raw encoder count data as a function oftime. In the middle plot, present the angular position data versus time for only theinitial descent. In the lower plot, present the vertical displacement data versus timefor only the initial descent.
8 SAVE AND EXECUTE THE SCRIPT: Periodically, as you work, save your work toyour USB drive, so that you have a convenient recovery point in the event of a signifi-cant error. After saving your completed script, we will next enter a single command,the name of your m-file, as a command in the command window. Use the “File - SaveAs” menu option in the Figure window to save your figure as a PNG image file.
9 OBSERVATIONS AND ANALYSIS: Write responses to the following questions in yourlogbook.
• Does your data appear to be reasonable?
• What observations can you make about the motion of the system, particularly whenthe direction of vertical motion of the dead weight reversed?
• What observations can you make about the motion of the system, particularly whenthe direction of rotary motion of the flywheel reversed?
• What role does the shaft play in the experiment?
• Is friction significant?
• Estimate the initial potential energy of the deadweight before its release.
• Estimate the PE and KE of the dead weight when it was at the minimum pointof its trajectory. Estimate the kinetic energy of the flywheel at this same instant.Comment on your results.
10 SUBMIT YOUR WORK: Upload your PNG figure and the Matlab code.
11 CONGRATULATIONS! You have just completed the Studio portion for week 14.
12 WRITE THE REPORT: Please refer to section 14.3.4 Report on details for the reportsubmission. Before leaving Studio, decide on a date and time to meet with your teammates to prepare the report.
458

14.3.4 Report
Please use the same task distribution for writing the report that was outlined in Week 1.This week we have added a theory section, which should be completed by the Team Manager.The scribe is responsible for compiling the report, however all team members are responsiblefor ensuring that the report is uploaded correctly and on time.
Prepare a report to include only the following components:
• TITLE PAGE: Include the title of your experiment, “Non-Uniform Circular Motion”,Team Number, date, authors, with the scribe first, the team member’s role for theweek, and a photograph of each person beginning to initiate their trial, with a labelbelow each photo providing team member’s name.
• PAGE 1: The heading should read Theory. In no more than one page, briefly describethe theory related to the experiment and simulation. Include important equationsrelevant to the lab. Be sure to define every variable in the equations, and includeunits. Remember to format the equations using the same structure as this book.
• PAGE 2: The heading on this page should read Experimental Set-up. Create adiagram of the experimental set-up. We will include only the diagram and no text.Thus, is it important that your diagram clearly communicate the set-up, includingeach key component and where measurements were taken. The important informationto communicate are the variable names, distances, axis and datums that relate to yourmeasurements and results. At the bottom of the figure include a figure caption, forexample Figure 1. A brief figure caption. Refer to the text for examples.
Note: Figure captions are required for every plot and diagram in the report, exceptfor the title page. Figure captions are placed below the figures, and are numberedsequentially beginning with Figure 1 for the first figure in the report.
• PAGE 3: The heading on this page should read Results. Include the information foreach team member, for all cases measured: flywheel information, deadweight informa-tion, maximum displacement, and time interval for first displacement.
Remember that any measured data point or value calculated from measured data hasan uncertainty. At the top of the table, include a table caption, for example Table 1.A brief figure caption. Refer to the text for examples.
We will include only tables and plots with no accompanying text. Thus, it is importantthat your tables, graphs and captions clearly communicate to the reader what the datarepresents.
Note: Table captions are required for every table in the report, except for the title page.Unlike figure captions, table captions are placed above the tables, and are numberedsequentially (independent of figure caption numbering) beginning with Table 1 for thefirst table in the report.
459

• PAGES 4, 5, 6, 7: No headings are needed on these pages, since it is a continuation ofthe Results section. On each page, include the three-part figures that were preparedby each team member, one page per team member. Format the figures so that theyare easily compared one to another.
• PAGE 5: The heading on this page should read Conclusions. Here you will statethe major conclusions that can be drawn from this analysis. In other words, youwill qualitatively and quantitatively answer the questions posed by the experiment.Consider the following guiding questions when preparing your conclusion. Evaluateyour estimates for angular displacement and linear displacement, consider if therewere any systematic bias errors present in your results. What are the most significantcontributors to uncertainty, and how would you mitigate them? Estimate the verticalacceleration of the dead weight during its initial descent, for each of the four team-member’s cases. Compare and contrast the observed vertical acceleration of the deadweight to the acceleration of gravity, Explain your results, using the theory presentedin this chapter.
Your conclusion should be NO LONGER than 1/2 a page when typed in 12 pt font.
• The final report should be collated into one document with page numbers and a con-sistent formatting style for sections, subsections and captions. Before uploading thefile, you must convert it to a pdf. Non-pdf version files may not appear the same indi↵erent viewers. Be sure to check the pdf file to make sure it appears as you intend.
460

14.4 Recitation
Recitation this week will focus on problem solving. Please come prepared, with your attemptsat the homework problems already in your logbooks. Additional problems and real-worldexamples of non-uniform circular motion will be discussed in Recitation.
461

14.5 Homework Problems
1 Compute the moment of inertia, Iz, about the axis of an aluminum flywheel with aninner and outer radius and axial length given by your experimental apparatus.
2 Compute the moment of inertia, Iz, about the axis of a steel flywheel with an innerand outer radius and axial length given by your experimental apparatus.
3 Compute the moment of inertia, Iz, about the axis of a solid steel shaft as given byyour experimental apparatus.
4 Estimate the expected vertical acceleration, a, of the deadweight. Compare the esti-mated vertical acceleration to the experimentally observed vertical acceleration. Ex-plain your findings.
5 Estimate the rotational kinetic energy stored in the aluminum flywheel when it isrotating at a constant speed of 1, 000[rpm].
6 Estimate the rotational kinetic energy stored in the steel flywheel when it is rotatingat a constant speed of 1, 000[rpm].
7 Estimate the rotational kinetic energy stored in the aluminum flywheel when it isrotating at a constant speed of 10, 000[rpm].
8 Estimate the rotational kinetic energy stored in the steel flywheel when it is rotatingat a constant speed of 10, 000[rpm]
9 A flywheel is used to store energy from an internal combustion engine. One purposeof the flywheel is to dampen the variation in power output of the engine as the pistonsmove through each reciprocating motion, so that the driveshaft is presented with astandard power output. The flywheel will rotate at 1, 000[rpm] and will be made ofsteel. The average power output of the engine is 100[hp]. The power output of theengine varies from 75% of average to 125% of average in the absence of the flywheel.The flywheel is desired to limit the variation to ±5%. The flywheel must store 20%of the engine output as rotational kinetic energy. Estimate the required moment ofinertia and mass of such a flywheel.
462