Chapter 1: Differential Form of Basic Equationsbj/MEG_741_F04/Lectures/Lecture 03.pdf · 3-1 MEG...
31
3-1 MEG 741 Energy and Variational Methods in Mechanics I Brendan J. O’Toole, Ph.D. Associate Professor of Mechanical Engineering Howard R. Hughes College of Engineering University of Nevada Las Vegas TBE B-122 (702) 895 - 3885 [email protected] Chapter 1: Differential Form of Basic Equations
-
Upload
truonghanh -
Category
Documents
-
view
223 -
download
6
Transcript of Chapter 1: Differential Form of Basic Equationsbj/MEG_741_F04/Lectures/Lecture 03.pdf · 3-1 MEG...

3-1
MEG 741 Energy and Variational Methods in Mechanics I
Brendan J. O’Toole, Ph.D.Associate Professor of Mechanical Engineering
Howard R. Hughes College of EngineeringUniversity of Nevada Las Vegas
TBE B-122(702) 895 - [email protected]
Chapter 1: Differential Form of Basic Equations

3-2
Lecture 03 Outline
• Some Comments on Shear Strain• Material Laws• Equilibrium• Boundary Conditions• Governing Equations

3-3
What Is the Difference Between Engineering Strain and Tensorial Strain
• Engineering and Tensorial Normal strains are defined the same: εxx = ε11 = ∆L/L
• Engineering Shear strain, γxy, is defined as the change in angle of two perpendicular axes as a material is deformed in shear.
• Tensorial shear strain is defined as ½ of engineering shear strain:
ε12 = (γ12)/2 and εxy = (γxy)/2
x
y
γxy
τxy
τxy
τxy
τxy

3-4
Engineering Strain and Tensorial Strain• It is sometimes convenient to write related equations in matrix
form so that they are more compact. • Albert Einstein devised a shorthand notation, Einstein’s Indicial
Notation, to be able to write equations in an even more efficient manner (but we will not be using that here).
• All terms written with matrix notation should be exactly the same as if all the equations were written out explicitly.
• Example:Strain Energy Density, W, is defined as the area under the stress-strain curve. In the linear region of the curve, the area forms a triangle so:
This example assumes a 2-D problem with applied normal stresses in the x- and y- directions, and an applied shear stress.
W = ½ (σx εx + σy εy + τxy γxy)

3-5
• Strain Energy Density
• We would like to be able to define strain energy density in terms of matrix operations: W = ½ [σ][ε]– Using engineering strain
– Using tensorial strain
• Tensorial Strain Must Be Used In All Matrix Operations
( )yyxyxyxxyxy
xyx
yxy
xyxW εσγτεσεγγε
σττσ
++=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡= 22
12
1
Engineering Strain and Tensorial Strain
W = ½ (σx εx + σy εy + τxy γxy)This is the correct definition of W.
Using engineering strain in matrix equations does not
give the correct W.
( )yyxyxyxxy
x
yxy
xyxxy
xy
W εσγτεσε
εσττσ
γ
γ
++=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡= 2
1
2
22
1Using tensorial strain in matrix equations does
give the correct W.

3-6
Material Laws(Constitutive Relations)
(Stress - Strain Equations)
• The stress-strain equations or constitutive relations are a good example of the usefulness of the indicial notation.
• The most basic constitutive relation that we first learn in Mechanics of Materials is the 1-D “Hookes Law” equation:
• σ = E ε, Stress equals Young's modulus times strain.
• Later, we learned that if there is strain in more than one direction, the stress will be a function of all strains.

3-7
General 3-D Constitutive Relations• The first two (of nine) stress equations can be written as
shown below. Each of the nine stress components is a function of all nine strain components. Each Q variable is a different function of material properties.
σxx = Qxxxxεxx + Qxxxyεxy + Qxxxzεxz + Qxxyxεyx +
Qxxyyεyy + Qxxyzεyz + Qxxzxεzx +
Qxxzyεzy + Qxxzzε zz
σxy = Qxyxxεxx + Qxyxyεxy + Qxyxzεxz + Qxyyxεyx +
Qxyyyεyy + Qxyyzεyz + Qxyzxεzx +
Qxyzyεzy + Qxyzzε zz

3-8
General 3-D Constitutive Relations• Both the shorthand and full matrix versions of
the 3-D constitutive equations are shown below.
where i, j, k and l represent x, y and z. Sometimes the numbers1, 2 and 3 are substituted for x, y and z.
σ ij = Qijklε kl
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
zzzyzxyzyyyxxzxyxx
zzzzQzzzyQzzzxQzzyzQzzyyQzzyxQzzxzQzzxyQzzxxQzyzzQzyzyQzyzxQzyyzQzyyyQzyyxQzyxzQzyxyQzyxxQzxzzQzxzyQzxzxQzxyzQzxyyQzxyxQzxxzQzxxyQzxxxQyzzzQyzzyQyzzxQyzyzQyzyyQyzyxQyzxzQxzxyQyzxxQyyzzQyyzyQyyzxQyyyzQyyyyQyyyxQyyxzQyyxyQyyxxQyxzzQyxzyQyxzxQyxyzQyxyyQyxyxQyxxzQyxxyQyxxxQxzzzQxzzyQxzzxQxzyzQxzyyQxzyxQxzxzQxzxyQxzxxQxyzzQxyzyQxyzxQxyyzQxyyyQxyyxQxyxzQxyxyQxyxxQxxzzQxxzyQxxzxQxxyzQxxyyQxxyxQxxxzQxxxyQxxxxQ
zzzyzxyzyyyxxzxyxx
εεεεεεεεε
σσσσσσσσσ

3-9
Simplifying the Constitutive Relations
• The general constitutive equations have 81 elastic constants. Luckily, the number of constants is reduced for most practical materials.
• Both the stress and strain tensors are symmetric.
σij = σji and εij = εji
This reduces the number of independent stresses and strains to 6.

3-10
Constitutive Relations
• Since there are only six independent stresses and strains, another shorthand notation is introduced using numeric subscripts. Let
σ1 = σxx and ε1 = εxxσ2 = σyy and ε2 = εyyσ3 = σzz and ε3 = εzz
σ4 = σyz = σzy and ε4 = 2εyz = 2εzyσ5 = σxz = σzx and ε5 = 2εxz = 2εzx σ6 = σxy = σyx and ε6 = 2εxy = 2εyx

3-11
Constitutive Relations• This reduces the number of independent
material constants to 36.
• A thermodynamics proof can be used to show that the Q matrix itself is symmetric, or Qij = Qji.
• This reduces the number of independent constants to 21.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
654
321
666564636261565554535251464544434241363534333231262524232221161514131211
654321
εεεεεε
σσσσσσ
QQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQ

3-12
Symmetry of Stiffness Matrix• Symmetry of the stiffness matrix is shown by considering the definition of
Strain Energy: W = σε• The use of Einstein’s Indicial Notation simplifies the proof. The proof is
shown here but we will not be covering indicial notation in this course.
This implies that ‘Q’, the stiffness matrix is symmetric and reduces the number of independent constants from 36 to 21.
klijijkl
klijklijijklijkl
klijklijklkl
ijklijkl
ijklijklijij
klijklij
QQTherefore
QW
Q
QW
Q
=
=
===
=
===
==
:
:equated becan and validareenergy strain for the sexpressionBoth
:subscriptsdifferent with rewritten becan equations These
εεεε
εεεσ
εσ
εεεσ
εσ
σε
σε
Qεσ

3-13
Anisotropy and Material Symmetry
• General Anisotropy• A material with different material properties in all
directions exhibits general anisotropy.• 21 independent elastic constants are required to define the
stress-strain relationship for this type of material.
• Orthotropic Material• Has 3 mutually orthogonal planes of elastic symmetry• e.g.: A material with the same properties in the +x and -x
directions has elastic symmetry about the y-z plane.• Most composite materials exhibit elastic symmetry about
three planes• Requires 9 independent elastic constants

3-14
Orthotropic Stress-Strain Equations
or σi = Qij εj , where Qij is know as the stiffness matrix. Inverting the matrix equation yields:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
654321
660000005500000044000000332313
000232212
000131211
654
321
σσσσσσ
εεεεεε
SS
SSSSSSSSSS
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
654
321
660000005500000044000000332313
000232212
000131211
654321
εεεεεε
σσσσσσ
QQQQQQQQQQ
or εi = Sij σj , where Sij is know as the compliance matrix. [S] =[Q]-1

3-15
Compliance Matrix• The compliance matrix values are easier to
define than the stiffness matrix values.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
654321
660000005500000044000000332313
000232212
000131211
654
321
σσσσσσ
εεεεεε
SS
SSSSSSSSSS
S12 = S21 = − ν12E11
= − ν21E22
S13 = S31 = − ν13E11
= − ν31E33
S23 = S32 = − ν23E22
= − ν32E33
S11 = 1E11
S44 = 1G23
S22 = 1E22
S55 = 1G13
S33 = 1E33
S66 = 1G12

3-16
Stiffness Matrix
• The Qij components are found by inverting Sij
Q11 = E11 1− ν23ν32( ) ∆ Q44 = G23
Q22 = E22 1 − ν31ν13( ) ∆ Q55 = G13
Q33 = E33 1 − ν12 ν21( ) ∆ Q66 = G12
Q12 = E11 ν21 + ν31ν23( ) ∆ = E22 ν12 + ν32 ν13( ) ∆
Q13 = E11 ν31 + ν21ν32( ) ∆ = E33 ν13 + ν12 ν23( ) ∆
Q23 = E22 ν32 + ν12 ν31( ) ∆ = E33 ν23 + ν21ν13( ) ∆
∆ = 1 − ν12 ν21 − ν23ν32 − ν31ν13 − 2ν21ν32 ν13

3-17
Isotropic Stress-Strain Relations
( )( )
( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+−−
−−−−
yzxzxyzyx
yzxzxyzyx
E
τττσσσ
νν
ννν
νννν
γγγεεε
120000001200000012000000100010001
1
( )( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−−
−−
−+
yzxzxyzyx
yzxzxyzyx
E
γγγεεε
ν
ν
νννν
νννννν
τττσσσ
νν
22100000
02210000
00221000
000100010001
211

3-18
Isotropic Stress-Strain Relations(Matrix Form of Equations)
εσ E=σε 1E−=(Index Form of Equations)
( )( ) ( )
ijkkijij
ijkkijijEE
µεελδσ
εν
εδνν
νσ
2or
1211
+=
++
−+=
Where λ and µ are known as Lame’s constants.Note that only 2 independent constants are needed to describe
isotropic material behavior.
Also note that µ = G = shear stiffness or modulus of rigidity

3-19
Common 2-D Conditions: Plane Stress
x
y
z
σy
σxτxy
• Applied to thin flat plates where the loads are generally in the plane of the plate.
• Assume normal and shear stresses in the z-direction are zero:
• Assume all other stresses and strains do not vary through the thickness.
• Substitute these assumptions into the general isotropic material law equations to get the following:
0=== yzxzz ττσ
( ) ( )yxzxzyz εεννεγγ +
−−
===1
and 0

3-20
Common 2-D Conditions: Plane Strain
• Applied to long structures where loads are in the transverse direction (long pressurized cylinders). Can be applied to other structures where strain is restricted in the z-direction.
• Assume strains along the long axis of the cylinder are zero z-direction):
• Substitute these assumptions into the general isotropic material law equations to get the following:
0=== yzxzz γγε
( )yxzxzyz σσνσττ +=== and 0
x
y
z

3-21
Material Laws for Plane Problems
Plane Stress:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−xy
y
x
xy
y
x E
γεε
νν
ντσσ
ν2
12
000101
1
Plane Strain:
( )( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
−+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−xy
y
x
xy
y
x E
γεε
νννν
νντσσ
ν221000101
211

3-22
Stress Resultants
x
y
z
σy
σxτxy x
y
z
ny
nxnxy
t
It is sometimes convenient to define stress resultants (nx, ny, nxy) as an alternative for stresses. Calculate the stress resultant as force/width (not force/thickness). Units are force/length.
∫∫∫ −−−===
2/
2/
2/
2/
2/
2/
t
t xyxy
t
t yy
t
t xx dzndzndzn τσσ
( )( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
−+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−xy
y
x
xy
y
x Et
nnn
γεε
νννν
ννν
221000101
211
Plane StrainPlane Stress
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−xy
y
x
xy
y
x Et
nnn
γεε
νν
νν
21
2
000101
1

3-23
Total State of Strain• Thermal strains or initial strains can be added to strains
caused by applied loads:
• A change in temperature causes the following strains in an isotropic body:
( )o
o1
εεEσεσEε
−=
+= −
0===
∆===oyz
oxz
oxy
oz
oy
ox T
γγγ
αεεε
where α is the coefficient of thermal expansion.
3-24
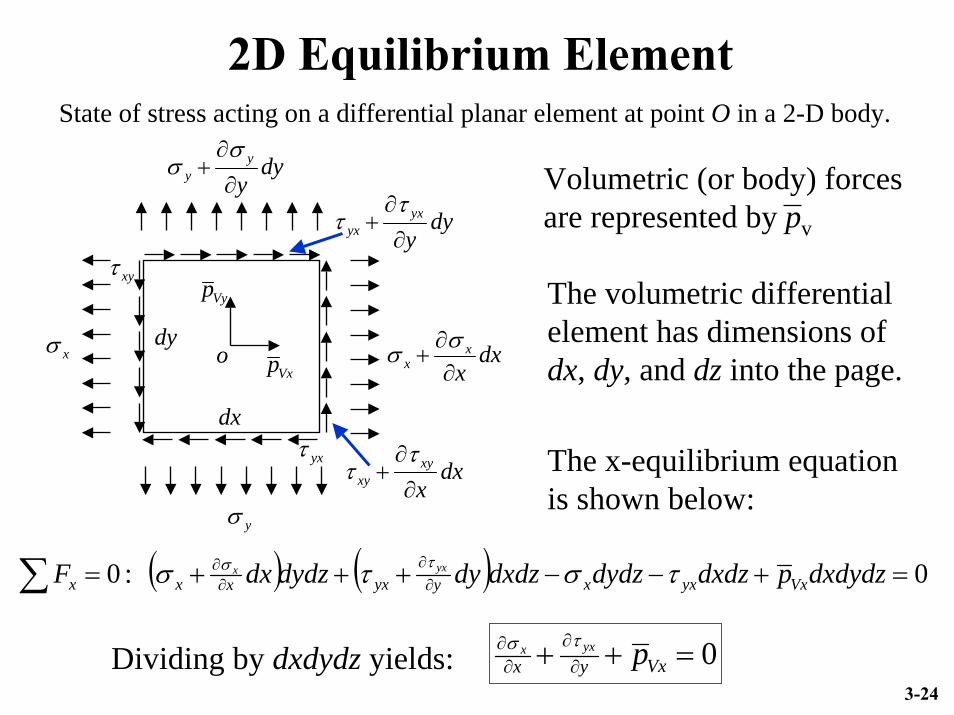
2D Equilibrium ElementState of stress acting on a differential planar element at point O in a 2-D body.
dxx
xx ∂
∂+
σσ
yxτ
yσ
dyyyx
yx ∂∂
+τ
τ
dyy
yy ∂
∂+
σσ
dxxxy
xy ∂∂
+τ
τ
dx
dy
Vyp
Vxpo
xyτ
Volumetric (or body) forces are represented by pv
The volumetric differential element has dimensions of dx, dy, and dz into the page.
The x-equilibrium equation is shown below:
xσ
( ) ( ) 0 :0 =+−−+++= ∂∂
∂∂∑ dxdydzpdxdzdydzdxdzdydydzdxF Vxyxxyyxxxx
yxx τστσ τσ
0=++ ∂∂
∂∂
Vxyx pyxx τσDividing by dxdydz yields:

3-25
2D Equilibrium EquationsWriting a force balance equation in the y-direction and a moment balance equation about point O yields:
xyyx ττ =0=++ ∂∂
∂∂
Vyxy pxyy τσ
Writing the 2-D equilibrium equations in matrix form:
00
0=⎥
⎦
⎤⎢⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡∂∂∂∂
Vy
Vx
xy
y
x
xy
yx
pp
τσσ
0pσD VT =+

3-26
Stress FunctionsIt is often convenient to express the different stresses in terms of a single ‘stress function’. Then, instead of solving for 3 different stresses, there will only be one unknown stress function.
Airy’s stress function (ψ) is most common. In the absence of body forces it is:
2
2
2
2
2
yxxy xyyx ∂∂∂
−=∂∂
=∂∂
=ψτψσψσ
The stress function must satisfy the equilibrium equations.
Verify that these equations satisfy equilibrium.

3-27
Boundary Conditions
Structural Body
Displacement Boundary Conditions along this edge.
Force Boundary Conditions along this edge.
Force boundary condition may be pressure, moment, point load, or zero load.
Su
SpThe entire boundary of the structure must be defined as Su OR Sp .
uSuu on =
Where u are the prescribed displacements.
Applied surface forces (per unit area) are referred to as surface tractions p .
pSpp on =

3-28
Governing Equations
( )ikkiik
ijkkijij
Vii
ij
uu
Px
,,21
2
0
+=
+=
=+∂∂
ε
µεελδσ
σEquilibrium (3):
Material Law (6):
Strain Displacement Equations (6):
15 Equations with
15 unknowns: ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
z
y
x
yz
xz
xy
z
y
x
yz
xz
xy
z
y
x
uuu
γγγεεε
τττσσσ

3-29
Displacement Formulation of Governing Equations
Matrix Form of Equations
ε = D uStrain Displacement Equations:
Material Law:
Equilibrium:
(1)
(2)
(3)
σ = E εDT σ + pV = 0
Substitute (1) into (2) into (3): DT E D u + pV = 0
021
1
021
1
021
1
2
2
2
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
−+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
−+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
−+∇
Gp
zu
yu
xu
zu
Gp
zu
yu
xu
yu
Gp
zu
yu
xu
xu
Vzzyxz
Vyzyxy
Vxzyxx
ν
ν
ν Now there are only 3 equations and 3 unknowns:
ux, uy, uz,

3-30
Displacement Formulation of Governing Equations
Shorthand Notation
( ) 0,2 =+++∇ Vikiki puGuG λ
If there are no body forces than this can be simplified even further:
022 =∇∇ iu
This is the classic biharmonic differential equation that appears frequently in mathematics. ∇2 is the Laplacian or harmonic operator:
2222zyxiu ∂+∂+∂=∇

3-31
Next Class
• Stress Analysis• Engineering Beam Theory• Torsion Theory