CH3
13
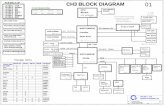
SINGLE PAHSE AC SUPPLY 230V, 50Hz CENTRE TAPPED TRANSFORMER O/P: (9-0-9) V CYCLOCONVERTER LOAD ARDUINO CONTROLLER CHAPTER 3 HARDWARE IMPLEMENTATION 3.1 BLOCK DIAGRAM & COMPONENTS DESCRIPTION: Fig: 3.1 Block diagram of cyclo-converter using microcontroller Here the single phase 230 V 50Hz supply is given to the centre tapped transformer (9-0-9) V. The output of the centre tapped transformer voltage is supplied to the cycloconverter module as input and the same output of the centre tapped transformer of 5 volts is supplied to the Arduino controller as input supply. By Arduino controller the gate triggering pulses of cycloconverter is controlled according to the required output voltage and frequency. 3.2 CENTRE TAPPED TRANSFORMER: A Centre Tapped transformer works in more or less the same way as a usual transformer. The difference lies in just the fact that its secondary winding is divided 12
-
Upload
rajaiah-jagari -
Category
Documents
-
view
213 -
download
0
description
gthi
Transcript of CH3
CHAPTER 3HARDWARE IMPLEMENTATION
3.1 BLOCK DIAGRAM & COMPONENTS DESCRIPTION:
SINGLE PAHSE AC SUPPLY230V, 50HzCENTRE TAPPED TRANSFORMERO/P: (9-0-9) V CYCLOCONVERTERLOADARDUINO CONTROLLER
Fig: 3.1 Block diagram of cyclo-converter using microcontroller Here the single phase 230 V 50Hz supply is given to the centre tapped transformer (9-0-9) V. The output of the centre tapped transformer voltage is supplied to the cycloconverter module as input and the same output of the centre tapped transformer of 5 volts is supplied to the Arduino controller as input supply. By Arduino controller the gate triggering pulses of cycloconverter is controlled according to the required output voltage and frequency.
3.2 CENTRE TAPPED TRANSFORMER:A Centre Tapped transformer works in more or less the same way as a usual transformer. The difference lies in just the fact that its secondary winding is divided into two parts, so two individual voltages can be acquired across the two line ends.The internal process is the same, which is when analternating currentis supplied to the primary winding of the transformer it creates a magnetic flux in the core, and when the secondary winding is brought near, an alternating magnetic flux is also induced in the secondary winding as the flux flows through the ferromagnetic iron core and changes its direction with each and every cycle of thealternating current. In this way analternating current also flows through the two halves of the secondary winding of the transformer and flows to the external circuit.
The primary difference that is evident here is that a normal transformer provides you with only one voltage, for example, say 240 V. But a center tapped transformer will provide you with two voltages each of 240/9-0-9V, so that we can drive two independent circuits.
3.3 THYRISTOR:Thyristors or Silicon Controlled Rectifiers, SCR are find many uses in electronics, and in particular for power control. These devices have even been called the workhorse of high power electronics. Thyristors are able to switch large levels of power are accordingly they used in a wide variety of different applications. Thyristors even finds uses in low power electronics where they are used in many circuits from light dimmers to power supply over voltage protection. The term SCR or silicon controlled rectifier is often used synonymously with that of thyristor - the SCR or silicon controlled rectifier is actually a trade name used by General Electric.The thyristor is a four-layered, three terminal semiconductor devices, with each layer consisting of alternatelyN-typeorP-typematerial, for example P-N-P-N. The main terminals, labelled anode and cathode, are across all four layers. The control terminal, called the gate, is attached to p-type material near the cathode. (A variant called an SCSSilicon Controlled Switchbrings all four layers out to terminals.) The operation of a thyristor can be understood in terms of a pair of tightly coupledbipolar junction transistors, arranged to cause a self-latching action:
Fig: 3.2 Structure on the physical and electronic level, and the thyristor symbolThyristor have three states: Reverse blocking mode Voltage is applied in the direction that would be blocked by a diode Forward blocking mode Voltage is applied in the direction that would cause a diode to conduct, but the thyristor has not been triggered into conduction Forward conducting mode the thyristor has been triggered into conduction and will remain conducting until the forward current drops below a threshold value known as the "holding current". When the anode is at a positive potential VAKwith respect to the cathode with no voltage applied at the gate, junctions J1and J3are forward biased, while junction J2is reverse biased. As J2is reverse biased, no conduction takes place (off state).Now if VAKis increased beyond the breakdown voltageVBOof the thyristor,avalanche breakdownof J2takes place and the thyristor starts conducting (On state).If a positive potentialVGis applied at the gate terminal with respect to the cathode, the breakdown of the junction J2occurs at a lower value ofVAK. By selecting an appropriate value ofVG, the thyristor can be switched into the on state quickly. Once avalanche breakdown has occurred, the thyristor continues to conduct, irrespective of the gate voltage, until: (a) the potentialVAKis removed or (b) the current through the device (anodecathode) is less than the holding current specified by the manufacturer. HenceVGcan be a voltage pulse, such as the voltage output from aUJToscillator. The gate pulses are characterized in terms of gate trigger voltage (VGT) and gate trigger current (IGT). Gate trigger current varies inversely with gate pulse width in such a way that it is evident that there is a minimum gatechargerequired to trigger the thyristor.
3.3.1 Switching Characteristics:In a conventional thyristor, once it has been switched on by the gate terminal, the device remains latched in the on-state (i.e.does not need a continuous supply of gate current to remain in the on state), providing the anode current has exceeded the latching current (IL).
Fig: 3.3 Switching characteristics of thyristorAs long as the anode remains positively biased, it cannot be switched off until the anode current falls below the holding current (IH).A thyristor can be switched off if the external circuit causes the anode to become negatively biased (a method known as natural, or line, commutation). In some applications this is done by switching a second thyristor to discharge a capacitor into the cathode of the first thyristor. This method is called forced commutation.
After the current in a thyristor has extinguished, a finite time delay must elapse before the anode can again be positively biasedandretain the thyristor in the off-state. This minimum delay is called the circuit commutated turn off time (TQ). Attempting to positively bias the anode within this time causes the thyristor to be self-triggered by the remaining charge carriers (holesandelectrons) that have not yetrecombined.
3.3.2 Holding Current:- The holding current (hypostatic) for electrical, electromagnetic and electronic devices is the minimum current which must pass through a circuit in order for it to remain in the 'ON' state. The term can be applied to a single switch or to an entire device. A simple example of holding current is in a Spark gap. In the most basic of circuits, if the current falls below the holding current even briefly, the circuit is turned 'OFF' (becomes blocked). However, complex circuits and devices may have different delays built-in between the time the current falls below this level and the time the device turns 'OFF'. Whether a device turns 'ON' when current is restored is a design issue. The current necessary to restore the circuit to the 'ON' state, called the "threshold current" (See threshold voltage), may be much greater than the holding current, or only very slightly more. Nevertheless, where the device is designed to turn back 'ON' upon restoration of the current and where the device is running at or about the holding current level, slight variations in the current can cause flicker as the device cycles 'OFF' and 'ON. If flicker is undesirable, it can be reduced by the use of capacitors or other circuits; on the other hand, flicker can be used to measure small events as in a GeigerMuller tube.
3.3.3 Latching Current:A related term is latching current, which is the minimum additional current that can make up for any missing input (gate) current in order to keep the device 'ON', in other words to keep the device's internal structure latched.
3.4 ARDUINO:Arduino is a tool for making computers that can sense and control more of the physical world than your desktop computer. It's an open-source physical computing platform based on a simple microcontroller board, and a development environment for writing software for the board. Arduino can be used to develop interactive objects, taking inputs from a variety of switches or sensors, and controlling a variety of lights, motors, and other physical outputs.
Fig: 3.4 Arduino boardArduino can be used to develop interactive objects, taking inputs from a variety of switches or sensors, and controlling a variety of lights, motors, and other physical outputs. Arduino projects can be stand-alone, or they can communicate with software running on your computer (e.g. Flash, Processing,and Max MSP.)The Arduino programming language is an implementation of Wiring, a similar physical computing platform, which is based on the Processing multimedia programming environment. Handy board and many others offer similar functionality. All of these tools take the messy details of microcontroller programming and wrap it up in an easy-to-use package. Arduino also simplifies the process of working with microcontrollers, but it offers some advantage for teachers, students, and interested amateurs over other systems. Open source and extensible hardware. The Arduino is based on Atmel ATMEGA8 and ATMEGA168 microcontrollers. The plans for the modules are published under a creative common license, so experienced circuit designers can make their own version of the module, extending it and improving it.
Fig: 3.5 ATMEGA328P-PU MicrocontrollerIt comes with a simple integrated development environment (IDE) that runs on regular personal computers and allows users to write programs for Arduino using C or C++.The Arduino integrated development environment (IDE) is a cross-platform application written in Java, and derives from the IDE for the Processing programming language and the Wiring projects. It is designed to introduce programming to artists and other newcomers unfamiliar with software development. It includes a code editor with features such as syntax highlighting, brace matching, and automatic indentation, and is also capable of compiling and uploading programs to the board with a single click. A program or code written for Arduino is called a sketch. 3.4.1 Pin Configuration:
VIN (input voltage): The input voltage to the Arduino board when it's using an external power source (as opposed to 5 volts from the USB connection or other regulated power source). You can supply voltage through this pin, or, if supplying voltage via the power jack, access it through this pin.
Vcc5V: This pin outputs a regulated 5V from the regulator on the board. The board can be supplied with power either from the DC power jack (7 - 12V), the USB connector (5V), or the VIN pin of the board (7-12V). Supplying voltage via the 5V or 3.3V pins bypasses the regulator, and can damage your board. We don't advise it.
3V: A 3.3 volt supply generated by the on-board regulator. Maximum current draw is 50 mA.
GND (ground): Ground pins. I/O REF (input output reference): This pin on the Arduino board provides the voltage reference with which the microcontroller operates. A properly configured shield can read the I/O REF pin voltage and select the appropriate power source or enable voltage translators on the outputs for working with the 5V or 3.3V.
Memory: The ATmega328 has 32 KB (with 0.5 KB used for the boot loader). It also has 2 KB of SRAM and 1 KB of EEPROM (which can be read and written with the EEPROM library).
Fig: 3.6 ATMEGA328P-PU Microcontroller pin descriptionInput and Output: Each of the 14 digital pins on the Uno can be used as an input or output, using pin Mode ( ), digital Write ( ), and digital Read ( ) functions. They operate at 5 volts. Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of 20-50 kilo-ohms. In addition, some pins have specialized functions:Serial: 0 (RX) and 1 (TX): Used to receive (RX) and transmit (TX) TTL serial data. These pins are connected to the corresponding pins of the ATmega8U2 USB-to-TTL Serial chip.
External Interrupts: 2 and 3: These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attach Interrupt () function for details. PWM: 3, 5, 6, 9, 10, and 11. Provide 8-bit PWM output with the analog Write () function. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication using the SPI library. LED 13: There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it's off. The Uno has 6 analog inputs, labelled A0 through A5, each of which provide 10 bits of resolution (i.e. 1024 different values). By default they measure from ground to 5 volts, though is it possible to change the upper end of their range using the AREF pin and the analog Reference ( ) function. Additionally, some pins have specialized functionality: TWI: A4 or SDA pin and A5 or SCL pin: Support TWI communication using the Wire library. There are a couple of other pins on the board: AREF: Reference voltage for the analog inputs. Used with analog Reference ( ). Reset. Bring this line LOW to reset the microcontroller.
3.4.2 Arduino Board Ratings:Micro controller -ATMEGA 328Operating voltage-5VInput voltage (recommended)-7-12VInput voltage (limits)-6-20VDigital I/O pins-14 (of which 6 provide PWM output)Analog input pins-6DC current per I/O pin-40mADC current for 3.3V pin-50mAFlash memory-32KB (Atmega328) of which 0.5 KB used by boot loaderSRAM-2KB (atmega328)EEPROM-1 KB (Atmega328)Clock speed-16MHz3.4.3 USB over current Protection: The Arduino Uno has a resettable poly fuse that protects your computer's USB ports from shorts and over current. Although most computers provide their own internal protection, the fuse provides an extra layer of protection. If more than 500mA is applied to the USB port, the fuse will automatically break the connection until the short or overload is removed. 20