CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.

CEE598 - Visual Sensing for
Civil Infrastructure Eng. & Mgmt.
Session 5 – Single View Metrology
Department of Civil and Environmental Engineering, University of Illinois at Urbana-Champaign
Mani Golparvar-Fard Department of Civil and Environmental Engineering
3129D, Newmark Civil Engineering Lab
e-mail: [email protected]

Reminders
“App Turns iPhone into a Smarted Camera” • Technology Review:
http://www.technologyreview.com/computing/32235/?p1=MstRcnt&a=f
http://www.youtube.com/watch?v=b0zLgCF42Vk&feature=player_embedded
“Google’s Art Project” • http://www.googleartproject.com/
(Based on an image-based reconstruction algorithm):
• http://www.youtube.com/watch?v=RAvnJCBYHgE&feature=player_embedded
Camera Calibration
Wikipage
Assignment 1 will be online Next Tuesday
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
2

Single View Metrology
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
3
Vermeer’s Music Lesson
Reconstructions by Criminisi et al.

New Papers in this area
Yu Chen, Duncan Robertson and Roberto Cipolla.
A Practical System for Modelling Body Shapes
from Single View Measurements. Proceedings of the
British Machine Vision Conference, pages 82.1-82.11.
BMVA Press, September 2011.
http://dx.doi.org/10.5244/C.25.82
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
4

Outline
Single View Metrology
• Review calibration
• Points and Lines
• Vanishing Points
• Measuring Height
5
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013 Some slides in this lecture are courtesy to Profs. D. Hoiem and S. Savarese
Reading: [HZ] Chapters 2,3,8

Outline
Single View Metrology
• Review calibration
• Points and Lines
• Vanishing Points
• Measuring Height
6
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013

jC
ii PMP
i
i
iv
up
In pixels
TRKM
100
v0
ucot
100
00
001
K o
o
sin
1
World ref. system
Calibration Problem
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
7

jC
ii PMP
i
i
iv
up
Need at least 6 correspondences
11 unknown
TRKM
In pixels World ref. system
Calibration Problem
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
8

Calibrating the Camera
Method 1: Use an object (calibration grid) with
known geometry
• Correspond image points to 3d points
• Get least squares solution (or non-linear solution)
134333231
24232221
14131211
Z
Y
X
mmmm
mmmm
mmmm
w
wv
wu
9 CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
9

Estimating the Projection Matrix
Place a known object in the scene
• Identify correspondence between image and
scene
• Compute mapping from scene to image
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
10
11 34333231
24232221
14131211
Z
Y
X
mmmm
mmmm
mmmm
v
u
TRKM

Direct Linear Calibration
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
11

Direct Linear Calibration
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
12

Direct Linear Calibration
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
13

Direct Linear Calibration
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
14
Can solve for 𝑚𝑖𝑗 by linear least squares

Calibration with linear method
Advantages: easy to formulate and solve
Disadvantages • Doesn’t tell you camera parameters • Doesn’t model radial distortion • Can’t impose constraints, such as known focal
length • Doesn’t minimize right error function (see HZ p.
181)
Non-linear methods are preferred • Define error as difference between projected points
and measured points • Minimize error using Newton’s method or other
non-linear optimization 15
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
15

Pinhole perspective projection
TRKM
C
Ow
-Internal parameters K are known
-R, T are known – but these can only relate C to the calibration rig
P p
Can I estimate P from the measurement p from a single image?
No - in general [P can be anywhere along the line defined by C and p]
Once the camera is calibrated...
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
16

Pinhole perspective projection
C
Ow
P p
unknown known Known/
Partially known/
unknown
Recovering structure from a single view
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
17

Outline
Single View Metrology
• Review calibration
• Points and Lines
• Vanishing Points
• Measuring Height
18
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013

Camera Calibration
What if world coordinates are not known?
Can we use scene features(vanishing points)?
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
19

Calibrating the Camera
Method 2: Use vanishing points
• Find vanishing points corresponding to orthogonal directions
Vanishing point
Vanishing line
Vanishing point
Vertical vanishing
point (at infinity)
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
20

Vanishing Points and Lines
Scene contains lines along directions that are
orthogonal
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
21

Calibration by orthogonal vanishing points
Intrinsic camera matrix
• Use orthogonality as a constraint
• Model K with only f, u0, v0
What if you don’t have three finite vanishing points?
• Two finite VP: solve f, get valid u0, v0 closest to image center
• One finite VP: u0, v0 is at vanishing point; can’t solve for f
ii KRXp 0j
T
i XX
For vanishing points
22 CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
22

Calibration by vanishing points
Intrinsic camera matrix
Rotation matrix
• Set directions of vanishing points
e.g., X1 = [1, 0, 0]
• Each VP provides one column of R
• Special properties of R
inv(R)=RT
Each row and column of R has unit length
ii KRXp
23 CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
23

(0,0,0)
The projective plane Why do we need homogeneous coordinates?
• represent points at infinity, homographies, perspective projection, multi-view relationships
What is the geometric intuition? • a point in the image is a ray in projective space
(sx,sy,s)
• Each point (x,y) on the plane is represented by a ray (sx,sy,s)
– all points on the ray are equivalent: (x, y, 1) (sx, sy, s)
image plane
(x,y,1)
-y
x -z
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
24

Projective lines
What does a line in the image correspond to in
projective space?
• A line is a plane of rays through origin
– all rays (x,y,z) satisfying: ax + by + cz = 0
z
y
x
cba0 :notationvectorin
• A line is also represented as a homogeneous 3-vector l
l p
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
25

l l
Point and line duality
• A line l is a homogeneous 3-vector
• It is to every point (ray) p on the line: l p=0
p1 p2
What is the intersection of two lines l1 and l2 ?
• p is to l1 and l2 p = l1 l2
Points and lines are dual in projective space
• given any formula, can switch the meanings of points and lines
to get another formula
l1
l2
p
What is the line l spanned by rays p1 and p2 ?
• l is to p1 and p2 l = p1 p2
• l is the plane normal
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
26

Ideal points and lines
Ideal point (“point at infinity”)
• p (x, y, 0) – parallel to image plane
• It has infinite image coordinates
(sx,sy,0) -y
x -z image plane
Ideal line
• l (a, b, 0) – parallel to image plane
(a,b,0)
-y
x
-z image plane
• Corresponds to a line in the image (finite coordinates)
– goes through image origin (principle point) CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
27

Homographies of points and lines
Computed by 3x3 matrix multiplication
• To transform a point: 𝒑′ = 𝑯𝒑
• To transform a line: 𝒍𝒑 = 0 𝑙′𝑝′ = 0
0 = 𝒍𝒑 = 𝒍𝑯−𝟏𝑯𝒑 = 𝒍𝑯−𝟏𝒑′ 𝒍′ = 𝒍𝑯−𝟏
lines are transformed by post multiplication of 𝑯−𝟏
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
28

3D projective geometry
These concepts generalize naturally to 3D
Homogeneous coordinates
Projective 3D points have four coords:
𝑷 = (𝑋, 𝑌, 𝑍, 𝑊)
Duality
A plane 𝑵 is also represented by a 4-vector
Points and planes are dual in 3D: 𝑵 𝑷 = 0
Projective transformations
Represented by 4x4 matrices 𝑻:
𝑷′ = 𝑻𝑷, 𝑵′ = 𝑵 𝑇−1
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
29

3D to 2D: “perspective” projection
Matrix Projection: ΠPp
1************
ZYX
w
wywx
What is not preserved under perspective
projection?
• Length, angles, parallelism
What IS preserved?
• Lines, incidences
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
30

Vanishing points
Vanishing point
• projection of a point at infinity
image plane
camera center
ground plane
vanishing point
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
31

Vanishing points (2D)
image plane
camera center
line on ground plane
vanishing point
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
32

Vanishing points
Properties
• Any two parallel lines have the same vanishing point v
• The ray from C through v is parallel to the lines
• An image may have more than one vanishing point
in fact every pixel is a potential vanishing point
image plane
camera center
C
line on ground plane
vanishing point V
line on ground plane
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
33

Vanishing lines
Multiple Vanishing Points • Any set of parallel lines on the plane define a vanishing point • The union of all of these vanishing points is the horizon line also called vanishing line
• Note that different planes define different vanishing lines
v1 v2
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
34

Vanishing lines
Multiple Vanishing Points • Any set of parallel lines on the plane define a vanishing point • The union of all of these vanishing points is the horizon line also called vanishing line
• Note that different planes define different vanishing lines
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
35

Computing vanishing points
V
DPP t 0
P0
D
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
36

Computing vanishing points
Properties • 𝑷 is a point at infinity, 𝒗 is its projection
• They depend only on line direction
• Parallel lines 𝑷0 + 𝑡𝑫, 𝑷1 + 𝑡𝑫 intersect at 𝑷
V
DPP t 0
0/1
/
/
/
1
Z
Y
X
ZZ
YY
XX
ZZ
YY
XX
tD
D
D
t
t
DtP
DtP
DtP
tDP
tDP
tDP
PP
ΠPv
P0
D
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
37

Computing vanishing lines
Properties
• 𝒍 is intersection of horizontal plane through 𝑪 with image
plane
• Compute 𝒍 from two sets of parallel lines on ground plane
• All points at same height as 𝑪 project to 𝒍 points higher than 𝐶 project above 𝑙
• Provides way of comparing height of objects in the scene
ground plane
l C
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
38

Is the Parachute higher than the person
who is taking this picture?
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
39

Fun with vanishing points
Perspective Cues?
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
40

Perspective cues
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
41

CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
42
Perspective cues 42

CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
43
Perspective cues 43

Ames Room
44
http://www.youtube.com/watch?v=hCV2Ba5wrcs&feature=related
http://www.youtube.com/watch?v=6aJlX0AEWys&feature=related
http://www.youtube.com/watch?v=6aJlX0AEWys&feature=related
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013

Vanishing
Point
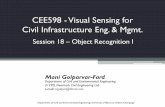
Comparing heights
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
45

CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
1
2
3
4
5 5.4
2.8
3.3
Camera height
Comparing heights
46

q1
Computing vanishing points (from lines)
Intersect p1q1 with p2q2
v
p1
p2
q2
Least squares version
• Better to use more than two lines and compute the “closest” point of
intersection
• See notes by Bob Collins for one good way of doing this:
– http://www-2.cs.cmu.edu/~ph/869/www/notes/vanishing.txt
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
47

C
Measuring height without a ruler
ground plane
Compute Z from image measurements
• Need more than vanishing points to do this
Z
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
48

The cross ratio
A Projective Invariant
• Something that does not change under projective transformations
(including perspective projection)
P1
P2
P3 P4
1423
2413
PPPP
PPPP
The cross-ratio of 4 collinear points
Can permute the point ordering
• 4! = 24 different orders (but only 6 distinct values)
This is the fundamental invariant of projective geometry
1
i
i
i
iZ
Y
X
P
3421
2431
PPPP
PPPP
Proof available on Scholar CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
49

vZ
r
t
b
tvbr
rvbt
Z
Z
image cross ratio
Measuring height
B (bottom of object)
T (top of object)
R (reference point)
ground plane
H C
TBR
RBT
scene cross ratio
1
Z
Y
X
P
1
y
x
pscene points represented as image points as
R
H
R
H
R
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
50

CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
Measuring height
R H
vz
r
b
t
R
H
Z
Z
tvbr
rvbt
image cross ratio
H
b0
t0
v vx vy
vanishing line (horizon)
51

CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
Measuring height vz
r
b
t0
vx vy
vanishing line (horizon)
v
t0
m0
What if the point on the ground plane b0 is not known?
• Here the guy is standing on the box, height of box is known
• Use one side of the box to help find b0 as shown above
b0
t1
b1
52

Computing (X,Y,Z) coordinates
Okay, we know how to compute height (Z
coords)
• how can we compute X, Y?
• Exact same idea as before, but substitute X for
Z (e.g., need a reference object with known X
coordinates)
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
53

3D Modeling from a photograph
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
54

Some Related Techniques
Image-Based Modeling and Photo Editing
• Mok et al., SIGGRAPH 2001
• http://graphics.csail.mit.edu/ibedit/
Single View Modeling of Free-Form Scenes
• Zhang et al., CVPR 2001
• http://grail.cs.washington.edu/projects/svm/
Tour Into The Picture
• Anjyo et al., SIGGRAPH 1997
• http://koigakubo.hitachi.co.jp/little/DL_TipE.html
CEE598 Visual Sensing for Civil Infrastructure Eng. & Mgmt. © Mani Golparvar-Fard, 2013
55