![UNTITLED - 1 [] · UNTITLED - 1 - 5/15 D Asus4 Eadd11 0 2 2 2 2 0 2 0 0 0 2 2 0 0 (2) 2 0 0 2 22 0 0 (2) 244 4 4 0 4 0 4 (4) 4 B II Dmaj7 Aadd9 2 2 2 4 2 4 2 (2) 2 2 5 2 4 2 2 2 (2)](https://static.fdocuments.in/doc/165x107/5fa90dad12ffeb1f8c259516/untitled-1-untitled-1-515-d-asus4-eadd11-0-2-2-2-2-0-2-0-0-0-2-2-0-0.jpg)
CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2]...
44
CE 272 Traffic Network Equilibrium Lecture 2 Review of Convex Optimization - Part I January 9, 2020 Lecture 2 Review of Convex Optimization - Part I
Transcript of CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2]...
![Page 1: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/1.jpg)
CE 272Traffic Network Equilibrium
Lecture 2Review of Convex Optimization - Part I
January 9, 2020
Lecture 2 Review of Convex Optimization - Part I
![Page 2: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/2.jpg)
2/44
Announcements
I Assignment 1 has been posted online. It is due January 22
Lecture 2 Review of Convex Optimization - Part I
![Page 3: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/3.jpg)
3/44
Previously on Traffic Network Equilibrium...
Nash Equilibrium (1951)
At equilibrium, no player has an incentive to deviate.
I Who are the agents/players of the game?Travelers
I What are the actions available to each player?Paths between the origin-destination (OD) pair
I What are the (dis)utilities of each player for a particularoutcome?Path travel times
Wardrop Equilibrium (1952)
All used paths have equal and minimal travel time.
Lecture 2 Review of Convex Optimization - Part I
![Page 4: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/4.jpg)
4/44
Previously on Traffic Network Equilibrium...
If you build it, they will come. But...
1
2
3
46 6
50 + 𝑥𝑥
50 + 𝑥𝑥10𝑥𝑥
10𝑥𝑥
10 + 𝑥𝑥
Building new road(s) may lead to more congestion. Equivalently,shutting down a road(s) may improve traffic!
Lecture 2 Review of Convex Optimization - Part I
![Page 5: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/5.jpg)
5/44
Lecture Outline
1 Convex Sets
2 Convex Functions
3 Formulating Optimization Problems
4 Unconstrained Optimization
Lecture 2 Review of Convex Optimization - Part I
![Page 6: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/6.jpg)
6/44
Lecture Outline
Convex Sets
Lecture 2 Review of Convex Optimization - Part I
![Page 7: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/7.jpg)
7/44
Convex SetsNote on Notation
Throughout the course we will try to use
I Boldfaced lower case letters to denote vectors (e.g., x, y)
I Boldfaced upper case letters to denote matrices (e.g., A,B)
I Blackboard bold typeface to denote standard sets such as reals,integers (e.g., R,Z)
I Upper case (e.g., X ,Y ) and calligraphic letters (e.g., M,N ) todenote sets and functions
Also, all vectors are assumed to be column vectors.
Lecture 2 Review of Convex Optimization - Part I
![Page 8: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/8.jpg)
8/44
Convex SetsDefinition
Definition (Convex Set)
A set X is convex iff the convex combination of any two points in the setalso belongs to the set. Mathematically,
X ⊆ Rn is convex⇔ ∀ x, y ∈ X and ∀λ ∈ [0, 1], λx + (1− λ)y ∈ X
𝑥𝑥
𝑦𝑦
𝑥𝑥𝑦𝑦
Lecture 2 Review of Convex Optimization - Part I
![Page 9: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/9.jpg)
9/44
Convex SetsExamples
Which of the following sets are convex?
1 Empty Set ∅2 Euclidean Ball B(x0, ε) = {x ∈ Rn | ‖x− x0‖ ≤ ε}
Lecture 2 Review of Convex Optimization - Part I
![Page 10: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/10.jpg)
10/44
Convex SetsExamples
Definition (Hyperplane)
Sets of the form {x ∈ Rn | aTx = b}, where a ∈ Rn, a 6= 0, b ∈ Rare called hyperplanes.
𝒂𝒂
𝒂𝒂𝑇𝑇𝒙𝒙 = 𝑏𝑏
Lecture 2 Review of Convex Optimization - Part I
![Page 11: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/11.jpg)
11/44
Convex SetsExamples
Definition (Halfspace)
Sets of the form {x ∈ Rn | aTx ≤ b}, where a ∈ Rn, a 6= 0, b ∈ Rare called halfspaces.
𝒂𝒂
𝒂𝒂𝑇𝑇𝒙𝒙 ≤ 𝑏𝑏𝒂𝒂𝑇𝑇𝒙𝒙 ≥ 𝑏𝑏
Lecture 2 Review of Convex Optimization - Part I
![Page 12: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/12.jpg)
12/44
Convex SetsExamples
Definition (Polyhedron)
A polyhedron is a set of the form P = {x ∈ Rn |Ax ≤ b} whereA ∈ Rm×n,b ∈ Rm.
𝑨𝑨𝟏𝟏⋅
𝑃𝑃𝑨𝑨𝟐𝟐⋅
𝑨𝑨𝟒𝟒⋅
𝑨𝑨𝟑𝟑⋅
Definition (Polytope)
A bounded polyhedron is called a polytope.
Lecture 2 Review of Convex Optimization - Part I
![Page 13: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/13.jpg)
13/44
Convex SetsExamples
Definition (Cone)
A set C is called a cone if for every x ∈ C and λ ≥ 0, λx ∈ C .
𝟎𝟎
𝒙𝒙
𝟎
𝒚
𝒙
Definition (Convex Cone)
A set C is called a convex cone if it is convex and a cone, i.e., ∀ x, y ∈ Cand λ1, λ2 ≥ 0, λ1x + λ2y ∈ C .
Lecture 2 Review of Convex Optimization - Part I
![Page 14: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/14.jpg)
14/44
Lecture Outline
Convex Functions
Lecture 2 Review of Convex Optimization - Part I
![Page 15: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/15.jpg)
15/44
Convex FunctionsDefinition
Definition (Convex Function)
A function f : X ⊆ Rn → R is convex if ∀ x, y ∈ X , λ ∈ [0, 1],
f (λx + (1− λ)y) ≤ λf (x) + (1− λ)f (y)
𝑥𝑥 𝑦𝑦𝜆𝜆𝑥𝑥 + 1 − 𝜆𝜆 𝑦𝑦
𝑓𝑓(𝜆𝜆𝑥𝑥 + 1 − 𝜆𝜆 𝑦𝑦)
𝜆𝜆𝑓𝑓 𝑥𝑥 + 1 − 𝜆𝜆 𝑓𝑓(𝑦𝑦)
Lecture 2 Review of Convex Optimization - Part I
![Page 16: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/16.jpg)
16/44
Convex FunctionsExamples
Which of the following functions are convex?
1 12x
2 x3
3 x4
4 |x |5 ex
6 sin x
7 log x
8 f (x) = max{x1, x2, . . . , xn}
Lecture 2 Review of Convex Optimization - Part I
![Page 17: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/17.jpg)
17/44
Convex FunctionsDifferentiable Functions
Definition (Convex Function)
A differentiable function of one variable f : X ⊆ R→ R is convex iff
f (y) ≥ f (x) + f ′(x)(y − x)∀ x , y ∈ X
𝑥𝑥 𝑦𝑦
𝑓𝑓′ 𝑥𝑥 (𝑦𝑦 − 𝑥𝑥)
𝑓𝑓(𝑥𝑥)
𝑓𝑓 𝑦𝑦
Lecture 2 Review of Convex Optimization - Part I
![Page 18: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/18.jpg)
18/44
Convex FunctionsDifferentiable Functions
For functions of more than one variable, the derivative can be replacedwith the gradient vector.
Definition (Convex Function)
A differentiable function of multiple variables f : X ⊆ Rn → R is convexiff
f (y) ≥ f (x) +∇f (x)T (y− x)∀ x, y ∈ X
where
∇f (x) =
∂f∂x1
∂f∂x2
...
∂f∂xn
Lecture 2 Review of Convex Optimization - Part I
![Page 19: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/19.jpg)
19/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
For a function of one variable, the gradient at a point in the domainis simply the slope of the tangent at the corresponding functionvalue.
What does the gradient look like for functions of more than onevariable?
Lecture 2 Review of Convex Optimization - Part I
![Page 20: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/20.jpg)
20/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
Definition (Level Sets)
Let c ∈ R. The level set of a function f : X ⊆ Rn → R is defined as
Lf (c) = {x ∈ X | f (x) = c}
When f is a function of two variables, the level sets are also referred to as
contour lines or level curves and when f is a function of three variables
they are called level surfaces.
Lecture 2 Review of Convex Optimization - Part I
![Page 21: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/21.jpg)
21/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
Consider the function f (x) = x21 + 2x2
2
−4 −2 0 2 4 −5
0
50
50
Lecture 2 Review of Convex Optimization - Part I
![Page 22: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/22.jpg)
22/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
Consider the function f (x) = x21 + 2x2
2 . The level sets are ellipsesx2
1 + 2x22 = c .
−4 −2 0 2 4 −5
0
50
50
Lecture 2 Review of Convex Optimization - Part I
![Page 23: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/23.jpg)
23/44
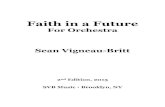
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
The following plot shows the level sets and the gradient [2x1 4x2]T .
−4 −2 0 2 4
−4
−2
0
2
4
The gradient vector is ‘orthogonal to the level sets’∗
∗A formal proof is a little involved but is not difficult and makes use of the Implicit Function Theorem.
Lecture 2 Review of Convex Optimization - Part I
![Page 24: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/24.jpg)
24/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
Consider the function of three variables f (x) = x21 +x2
2 +x23 . (It’s impossible
to visualize this function as we can’t create a 4D plot.) The level sets
however can be drawn as they are spheres x21 + x2
2 + x23 = c .
x1
x2
x3
Lecture 2 Review of Convex Optimization - Part I
![Page 25: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/25.jpg)
25/44
Convex FunctionsDifferentiable Functions - Visualizing the Gradient
Consider the level set x21 + x2
2 + x23 = 1. The gradient of the function is
[2x1 2x2 2x3]T and its value at (0.5, 0.5,√
0.5) is (1, 1, 2√
0.5), which is
normal to the tangent plane at (0.5, 0.5,√
0.5).
(0.5, 0.5,√
0.5)
x1
x2
x3
Lecture 2 Review of Convex Optimization - Part I
![Page 26: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/26.jpg)
26/44
Convex FunctionsTwice-Differentiable Functions
Definition (Convex Function)
A twice-differentiable function of one variable f : X ⊆ R→ R is convexiff f ′′(x) ≥ 0 ∀ x ∈ X .
𝑎𝑎
𝑏𝑏 ≥ 𝑎𝑎
Δ𝑥𝑥 Δ𝑥𝑥
Lecture 2 Review of Convex Optimization - Part I
![Page 27: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/27.jpg)
27/44
Convex FunctionsTwice-Differentiable Functions
In higher dimensions, we make use of the Hessian matrix instead of thesecond derivative. But first, we need some additional definitions.
Definition (Positive Definite Matrix)
A symmetric matrix A ∈ Rn×n is called a positive definite matrix and isdenoted as A � 0 if xTAx > 0 for all non-zero x ∈ Rn.
Definition (Positive Semidefinite Matrix)
A symmetric matrix A ∈ Rn×n is called a positive semidefinite matrix andis denoted as A � 0 if xTAx ≥ 0 for all non-zero x ∈ Rn.
One can similarly define negative definite and negative semidefinitematrices.
Lecture 2 Review of Convex Optimization - Part I
![Page 28: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/28.jpg)
28/44
Convex FunctionsTwice-Differentiable Functions
Definition (Convex Function)
A twice-differentiable function f : X ⊆ Rn → R is convex iff∇2f (x) � 0 ∀ x ∈ X .
where
∇2f (x) =
∂2f∂x2
1
∂2f∂x1∂x2
. . . ∂2f∂x1∂xn
∂2f∂x2∂x1
∂2f∂x2
2. . . ∂2f
∂x2∂xn...
.... . .
...∂2f
∂xn∂x1
∂2f∂xn∂x2
. . . ∂2f∂x2
n
Lecture 2 Review of Convex Optimization - Part I
![Page 29: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/29.jpg)
29/44
Convex FunctionsTwice-Differentiable Functions
Verifying if the Hessian is positive semidefinite is challenging because weneed to check if xTAx ≥ 0 for all possible non-zero vectors x.
However, if the Hessian is a diagonal matrix the following proposition canbe used.
Proposition (Positive Definite Matrix)
A diagonal matrix is positive definite (semidefinite) iff all diagonalelements are strictly positive (non-negative).
Lecture 2 Review of Convex Optimization - Part I
![Page 30: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/30.jpg)
30/44
Convex FunctionsTwice-Differentiable Functions
Which of the following functions are convex?
1 x21 + x4
2 + x23
2 x21 + x3
2 + x2
Lecture 2 Review of Convex Optimization - Part I
![Page 31: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/31.jpg)
31/44
Convex FunctionsStrict Convexity
Definition (Strict Convexity)
A function f : X ⊆ Rn → R is strictly convex if ∀ x, y ∈ X , λ ∈ [0, 1],f (λx + (1− λ)y) < λf (x) + (1− λ)f (y)
Definition (Strict Convexity)
A differentiable one-dimensional function f : X ⊆ Rn → R is strictlyconvex iff f (y) > f (x) +∇f (x)T (y− x)∀ x, y ∈ X
Definition (Strict Convexity)
A twice-differentiable function f : X ⊆ Rn → R is strictly convex iff∇2f (x) � 0 ∀ x ∈ X .
Lecture 2 Review of Convex Optimization - Part I
![Page 32: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/32.jpg)
32/44
Lecture Outline
Formulating Optimization Problems
Lecture 2 Review of Convex Optimization - Part I
![Page 33: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/33.jpg)
33/44
Formulating Optimization ProblemsGeneral Framework
Optimization problems typically have the following three components:
1 Objective function
2 Decision variables
3 Constraints
While the first two are present in all optimization models, it is not necessaryto have constraints. Problems without constraints are called unconstrainedproblems.
Lecture 2 Review of Convex Optimization - Part I
![Page 34: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/34.jpg)
34/44
Formulating Optimization ProblemsGeneral Framework
Any optimization program can be written in the following standard form.
minx
f (x)
s.t. gi (x) ≤ 0 ∀ i = 1, 2, . . . , l
hi (x) = 0 ∀ i = 1, 2, . . . ,m
x ∈ X
The functions g and h define the inequality and equality constraints respectively.∗
The set X is used to represent additional constraints (e.g., integrality),which we won’t have in this course. Instead, we use X to denote implicitconstraints (more on next slide).
The set of decision variables that satisfy all the constraints is called thefeasible region.
Maximization problems can be converted into the standard form by simply
changing the sign of the objective function.∗The equality constraints are superfluous (Why?) but we’ll retain them for reasons that will become apparent later.
Lecture 2 Review of Convex Optimization - Part I
![Page 35: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/35.jpg)
35/44
Formulating Optimization ProblemsGeneral Framework
We assume, throughout this course, that the functions f , g , and h aredifferentiable and have open domains.
These functions (e.g., log x , 1/x) can impose implicit constraints. We’lluse X to denote the set of x that satisfy such implicit constraints.
X = domain(f )l⋂
i=1
domain(gi )m⋂i=1
domain(hi )
It is common practice to not write the implicit constraints in the standardform.
minx
f (x)
s.t. gi (x) ≤ 0 ∀ i = 1, 2, . . . , l
hi (x) = 0 ∀ i = 1, 2, . . . ,m
Lecture 2 Review of Convex Optimization - Part I
![Page 36: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/36.jpg)
36/44
Formulating Optimization ProblemsExamples
Formulate an optimization model in the standard form for the followingproblems:
I You have a 4m long wooden frame that needs to be cut to create awindow frame. What would be the dimensions of the window thatlets in the most light?
I You are given three fixed non-collinear points in a 2D plane. Find afourth point that minimizes the sum of the distances from the threepoints. What if the fourth point must lie within the triangle formedby the three points?
Lecture 2 Review of Convex Optimization - Part I
![Page 37: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/37.jpg)
37/44
Formulating Optimization ProblemsExamples
Optimization models have numerous applications in the area of transporta-tion. For example,
I What is the shortest distance/time between two points in anetwork?
I How to ship goods from production centers to warehouses atminimum cost while preserving capacity constraints?
I Where do you locate fire stations to maximize coverage area for agiven budget?
I What is the maximum rate at which you can evacuate a city duringa disaster?
Lecture 2 Review of Convex Optimization - Part I
![Page 38: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/38.jpg)
38/44
Formulating Optimization ProblemsTypes of Optimization Problems
Optimization problems are commonly classified as:
I Linear Programs (LPs): Objective function and constraints arelinear functions of the decision variables x.
I Integer Programs (IPs): The decision variables take only integervalues (i.e., X ⊆ Z)
I Non-linear Programs (NLPs): The objective function and/orconstraints involves a non-linear function of the decision variables x.
Typically, LPs and convex NLPs are easy to solve when compared to IPsand non-convex NLPs.
In this course, we will mostly deal with convex NLPs in which the objectivefunction and the feasible region are convex.
Lecture 2 Review of Convex Optimization - Part I
![Page 39: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/39.jpg)
39/44
Lecture Outline
Unconstrained Optimization
Lecture 2 Review of Convex Optimization - Part I
![Page 40: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/40.jpg)
40/44
Unconstrained OptimizationLocal and Global Minima
Definition (Global Minimum)
x∗ ∈ X is a global minimum of f : X → R iff f (x∗) ≤ f (x) ∀ x ∈ X .
Definition (Local Minimum)
x∗ ∈ X is a local minimum of f : X → R if ∃ ε > 0 such thatf (x∗) ≤ f (x) ∀ x ∈ X ∩ B(x∗, ε).
𝑥𝑥 𝑦𝑦
Both x and y are local minima but only point x is the global minimum of f .
Lecture 2 Review of Convex Optimization - Part I
![Page 41: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/41.jpg)
41/44
Unconstrained OptimizationOptimality Conditions
Before learning to minimize a function, we’d first like to characterize theoptimal solutions. We will look at methods to find these solutions muchlater.
In other words, we seek answers to the following questions.
I Are there conditions that the optimal solutions satisfy?
I If I gave you a feasible solution, can you tell me if it isoptimal?
These type of results are also called optimality conditions. Note that the
two questions are not synonymous. The conditions satisfied by optimal
solutions may be also be satisfied by non-optimal solutions.
Lecture 2 Review of Convex Optimization - Part I
![Page 42: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/42.jpg)
42/44
Unconstrained OptimizationOptimality Conditions
Let’s answer these questions for unconstrained problems. (We treat prob-lems with implicit constraints as unconstrained programs.)
Proposition (Necessary Conditions)
x∗ is a local minimum of a differentiable function f : X ⊆ Rn → R⇒ ∇f (x∗) = 0
The converse is not true! (Why?) Thus, for x∗ to be optimal it is notsufficient if∇f (x∗) = 0. To derive sufficient conditions, we need convextiy.
Proposition (Necessary and Sufficient Conditions)
x∗ is a global minimum of a differentiable convex functionf : X ⊆ Rn → R ⇔ ∇f (x∗) = 0
These are also referred to as first-order optimality conditions since they
use the first derivatives.
Lecture 2 Review of Convex Optimization - Part I
![Page 43: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/43.jpg)
43/44
Unconstrained OptimizationRemarks on Existence of Optimal Solutions
A function may not have a minimum or may be unbounded. For example,
I ex does not have a minimum (note that infimum exits)
I x is unbounded
However, if the problem is constrained, we could come up with conditionsthat guarantee the existence of an optima. E.g.,
Proposition
A continuous function with a compact domain (closed and bounded)always has a minimum.
Lecture 2 Review of Convex Optimization - Part I
![Page 44: CE 272 Traffic Network Equilibrium - IISc Bangalorecivil.iisc.ac.in/~tarunr/CE_272/Lecture_2.pdf2] T. 4 2 0 2 4 4 2 0 2 4 The gradient vector is ‘orthogonal to the level sets’](https://reader033.fdocuments.in/reader033/viewer/2022042416/5f3175a9a76e980e380dad2b/html5/thumbnails/44.jpg)
44/44
Your Moment of Zen
Just when you thought you found a parking spot...
Lecture 2 Review of Convex Optimization - Part I
![Finale 2008a - [Concerto 11x17 08 FINISHED.MUS]...B?? 42 4 2 4 2 4 2 4 2 42 42 42 42 42 42 42 42 42 42 42 4 2 4 2 4 2 4 2 4 2 4 2 42 42 4 2 4 2 4 2 4 2 4 2 42 42 42 42 4 2 44 4 4 4](https://static.fdocuments.in/doc/165x107/612a063f5c0f480cba5d662b/finale-2008a-concerto-11x17-08-b-42-4-2-4-2-4-2-4-2-42-42-42-42-42-42.jpg)
![Oh Pretty Woman4sc].pdfã ### ### ### ### ### ### ### ### 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4](https://static.fdocuments.in/doc/165x107/60cfb349cd0cbb00d32b6774/oh-pretty-woman-4scpdf-4-4-4-4-4-4-4-4-4-4.jpg)














![Finale 2005 - [Tico - Tico no Fubá.MUS] · bb # # # # # bb bb bb 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 2 42 4 2 4 2 4 2 4 2 4 2 4 2 4 2 4 2 Flauta (C) Requinta 1º Clarinete (Bb) 2º](https://static.fdocuments.in/doc/165x107/5c615c4509d3f2ae6c8cefad/finale-2005-tico-tico-no-fubamus-bb-bb-bb-bb-4-2-4-2-4-2-4.jpg)
