Cathal Bowe - PhD
504
DYNAMIC INTERACTION OF TRAINS AND RAILWAY BRIDGES USING WHEEL RAIL CONTACT METHOD by CATHAL BOWE National University of Ireland, Galway Faculty of Engineering Department of Civil Engineering A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy Dean of College of Engineering & Informatics Research Supervisor Prof. Padraic E. Donoghue Dr. Thomas Mullarkey November 2009
-
Upload
cathalbowe -
Category
Documents
-
view
326 -
download
9
Transcript of Cathal Bowe - PhD

DYNAMIC INTERACTION OF TRAINS AND RAILWAY
BRIDGES USING WHEEL RAIL CONTACT METHOD
by
CATHAL BOWE
National University of Ireland, Galway
Faculty of Engineering
Department of Civil Engineering
A thesis submitted in partial fulfilment of the requirements
for the degree of Doctor of Philosophy
Dean of College of Engineering & Informatics Research Supervisor
Prof. Padraic E. Donoghue Dr. Thomas Mullarkey
November 2009


i
ABSTRACT
The primary objective of this thesis is to develop numerical models that can be used in the safety
assessments of rail-bridge systems. Iarnród Éireann, co-sponsor of this research, is particularly
interested in the dynamic effects caused by the increasing axle loads and by the increase in line speeds
of trains travelling over bridges. The centre span of Boyne Viaduct Railway Bridge is investigated as a
case study, including actions of the railway tracks leading up to and away from the bridge, and is
modelled as a two-dimensional and three-dimensional truss.
ANSYS is the finite element program used throughout the thesis to analyse the dynamic behaviour of a
train traversing a railway bridge. However, it was discovered that this program has many limitations; in
particular, its contact elements are unable to correctly model track irregularities or a train braking.
Nevertheless, this problem is overcome by the author’s development of his own wheel-rail contact
element, which can model the vertical, longitudinal and lateral responses of each wheel on the rail and
also includes track irregularities and wheel-rail separation. This development assumes that a Hertzian
spring element exists between each wheel and the rail and is often called a sprung mass wheel system.
Under smooth rail conditions, results show that the author’s wheel-rail contact element performs better
than the commercial node-to-surface contact elements in ANSYS because the author’s system
maintains accuracy when the number of elements in the model is reduced unlike the ANSYS contact
element system which loses its accuracy.
In this thesis, the author also develops both a modal and finite element model of a moving unsprung
mass traversing a bridge that can include track irregularities. The author highlights the similarities and
differences between the modal and finite element model from the point of view of the form of the final
matrices. The unsprung wheel system assumes that the wheel is permanently attached to the rail and
cannot separate from it; thus, the unsprung mass experiences both local and convective velocities and
accelerations, which must be taken into account. Early studies of the moving unsprung mass show that
the convective velocity and acceleration were omitted from the model; thus their solution is inaccurate.
Nevertheless, many authors are still comparing the results of their models with this inaccurate solution,
ignoring the issue of convective acceleration. The author addresses this issue in the thesis by
specifically presenting the correct solution of a moving unsprung mass traversing a cantilever beam.
Other results reveal that the developed unsprung systems are comparable with the developed wheel-rail
contact element when the Hertzian stiffness is reasonably large value and separation is not allowed.
From our case study of the centre span of the Boyne Viaduct Railway Bridge, the author found that a
passenger train travelling at approximately 200 km/hr has a dynamic deflection equal to the static
loaded deflection multiplied by a factor of 1.07. Moreover, it was found that the bridge could be
susceptible to resonance generated by repetitive loaded vehicles travelling at service speeds; namely,
the train Type 1 travelling at 228 km/hr or train Type 8 travelling at 110 km/hr from the Eurocodes.

ii
DECLARATION
I hereby declare that this thesis, in whole or in part, has not been previously submitted
to any other university as an exercise for a degree. Except where specific reference to
the work of others is given in the text, this thesis is entirely my own work.
Cathal Bowe, November 2009

iii
ACKNOWLEDGEMENTS
This thesis describes work conducted at the Department of Civil Engineering of the National
University of Ireland, Galway (NUIG). The research project has been generously funded by
Irish Rail and Enterprise Ireland. This financial support is greatly acknowledged.
The research was carried out under the supervision of Dr. Thomas Mullarkey, to whom I wish
to express my sincere gratitude for his assistance throughout this thesis. His knowledge of
structural dynamics, elastic beam theories, and finite element methods as well as his help
developing the many mathematical formulations within this thesis are greatly appreciated, in
particular, his help with the development of the time varying moving forces in Chapter 3, the
wheel-rail contact element in Chapter 4, the modal and finite element method of a moving
unsprung mass in Chapter 5, the irregularity functions in Chapter 6 and the many
mathematical equations found in my Appendices. I would also like to thank him for the
countless hours that he has spent reading and fine tuning my thesis.
I would like to thank Dr. Michal Majka, a good friend, for his help, encouragement, and
dynamic expertise. From my early PhD days to its final stages, Michal has always been
supportive, for which, I’m very grateful. In addition, I would like to thank Dr. Michael
Hartnett for his dynamic expertise and for securing financial support in the third year of my
studies.
I would like to thank my parents, Charlie and Teresa Bowe, for their financial support and
their constant encouragement over the years. Additionally, I would like to thank brothers,
sisters and friends, in particular my finacée Amanda, for their support.
Finally, I wish to thank all of my colleagues and staff at NUIG and those who have not been
mentioned by name, but who have helped me during the course of the work,
Thank you.

iv
CONTENTS
LIST OF SYMBOLS AND ABBREVIATIONS .................................................... xii
INTRODUCTION ....................................................................................................... 1
1.1 Background & Motivation ............................................................................... 1
1.2 ANSYS Strength & Weaknesses ..................................................................... 3
1.3 Chapter Summary ............................................................................................ 6
LITERATURE REVIEW ......................................................................................... 11
2.1 Introduction .. ................................................................................................ 11
2.2 Modelling Railway Vehicles ......................................................................... 11
2.2.1 History of Railway Vehicle Dynamics ................................................ 11
2.2.2 Vehicle Model ...................................................................................... 13
2.2.2.1 Moving Constant Force .......................................................... 13
2.2.2.2 Weight and Mass of Moving Wheel ...................................... 14
2.2.2.3 Mass of the Moving Vehicle .................................................. 15
2.2.3 Vehicle Characteristics ......................................................................... 16
2.2.3.1 Vehicle Spacing ..................................................................... 16
2.2.3.2 Vehicle Speed ........................................................................ 17
2.2.3.3 Braking & Accelerating of Vehicles ...................................... 18
2.2.3.4 Passenger Riding Comfort ..................................................... 19
2.2.3.5 Ratio between Sprung & Unsprung Masses .......................... 20
2.2.3.6 Ratio between the Vehicle Mass & Bridge Mass .................. 20
2.3 Modelling Railway Bridges ........................................................................... 21
2.3.1 Railway Bridge Types .......................................................................... 21
2.3.1.1 Beam Railway Bridge ............................................................ 21

v
2.3.1.2 Truss Railway Bridge ............................................................. 22
2.3.1.3 Suspension & Cable Bridges .................................................. 22
2.3.1.4 Boyne Viaduct Railway Bridge .............................................. 23
2.3.2 Bridge Characteristics .......................................................................... 24
2.3.2.1 Bridge Natural Frequency ...................................................... 24
2.3.2.2 Bridge Damping ..................................................................... 25
2.3.2.3 Bridge Span Length ................................................................ 26
2.3.2.4 Rail Approaches ..................................................................... 27
2.3.2.5 Dynamic Amplification Factor ............................................... 27
2.3.3 Numerical Bridge Solutions ................................................................. 28
2.3.3.1 Finite Element Model ............................................................. 29
2.3.3.2 Method of Modal Superposition ............................................ 30
2.4 Modelling Irregularities ................................................................................. 31
2.4.1 Wheel Irregularities .............................................................................. 31
2.4.2 Rail Irregularities .................................................................................. 31
2.5 Wheel-Rail Contacts ...................................................................................... 32
2.5.1 ANSYS contact elements ..................................................................... 33
2.5.2 Hertz Contact Theory ........................................................................... 34
2.5.3 Vehicle-bridge interaction element ...................................................... 34
2.6 Summary ....... ................................................................................................ 35
WHEEL FORCE REPRESENTED AS TIME VARYING NODAL FORCES
AND MOMENTS ...................................................................................................... 37
3.1 Introduction ... ................................................................................................ 37
3.2 Single Moving Force as a Function of Time ................................................. 40
3.2.1 Development of single moving force ................................................... 40

vi
3.2.1.1 Moving force using an approximate simple model ................ 44
3.2.1.2 Moving force using an exact numerical model ...................... 48
3.2.1.3 Moving single force using ANSYS contact elements ............ 52
3.2.2 Validation of moving force as a function of time ................................. 53
3.2.2.1 Cantilever beam subjected to a moving load ......................... 53
3.2.2.2 Simply supported beam subjected to a moving load ............. 54
3.2.2.3 Sensitivity analysis of the developed systems ....................... 56
3.2.2.4 Examining internal forces of the developed systems ............. 60
3.2.3 Application of single load traversing Boyne Viaduct .......................... 73
3.3 Multiple Moving Forces as a Function of Time ............................................... 78
3.3.1 Development of multiple moving forces .............................................. 78
3.3.1.1 Simple solution without overlapping time functions ............. 78
3.3.1.2 Simple solution with overlapping time functions .................. 84
3.3.1.3 Multiple moving forces using ANSYS contact elements ...... 87
3.3.2 Validation of multiple moving forces as a function time ..................... 88
3.3.3 Application of multiple forces traversing the Boyne Viaduct .............. 96
3.3.3.1 Railway Vehicles ................................................................... 96
3.3.3.2 Two-Dimensional Boyne Bridge ........................................... 97
3.3.5.3 Three-Dimensional Boyne Bridge ....................................... 101
3.3.5.4 Twin-track Railway Bridge .................................................. 106
3.3.5.5 Boyne Viaduct subjected to Eurocodes (1991) rail loads .... 109
3.4 Discussion of results and Conclusion ............................................................. 113
SPRUNG MASS REPRESENTED BY TIME VARYING STIFFNESS
MATRICES .............................................................................................................. 117
4.1 Introduction .. .............................................................................................. 117

vii
4.2 Development of the Wheel-Rail Contact Elements ..................................... 120
4.2.1 Vertical Spring Element using time varying matrices ........................ 120
4.2.2 Longitudinal Spring Element using time varying matrices ................ 128
4.2.3 Lateral Spring Element using time varying matrices ......................... 135
4.2.4 Multiple wheels using the WRC element ........................................... 144
4.3 Validating the Wheel-Rail Contact Elements .............................................. 146
4.3.1 Wheel as a sprung load traversing a cantilever beam ......................... 146
4.3.2 Wheel as a sprung mass traversing a cantilever beam ........................ 148
4.3.3 Wheel as a sprung load traversing a simply supported beam ............. 151
4.3.4 Wheel as a sprung mass traversing a simply supported beam............ 153
4.3.5 A travelling bouncing wheel traversing a rigid rail and beam ........... 156
4.3.6 Sprung & unsprung systems at a wide range of contact stiffness ...... 158
4.3.7 Sensitivity analysis of the WRC element ........................................... 160
4.3.8 Simply supported beam subjected to a two-wheeled system ............. 162
4.3.9 Two-wheeled vehicle subjected to braking effects ............................ 165
4.4 Application of WRC element with Boyne Viaduct ..................................... 170
4.4.1 Single sprung wheel traversing two-dimensional Boyne Viaduct ..... 170
4.4.2 Railway Vehicle ................................................................................. 175
4.4.3 Two-dimensional bridge-train model ................................................. 179
4.4.4 Braking and accelerating effects of train on the bridge ...................... 183
4.4.5 Three-dimensional bridge-train model ............................................... 188
4.4.6 Effects of lateral cross winds on the train as it travels ....................... 192
4.5 Discussion of results and Conclusions ......................................................... 194

viii
UNSPRUNG MASS REPRESENTED BY TIME VARYING MASS, DAMPING,
AND STIFFNESS MATRICES WITHIN A MODAL AND FINITE ELEMENT
FRAMEWORK ........................................................................................................ 197
5.1 Introduction .............................................................................................. 197
5.2 Development of the unsprung wheel system ............................................... 200
5.2.1 Modal superposition model incorporating moving unsprung mass ... 200
5.2.1.1 Modal superposition model of a moving load ........................ 205
5.2.1.2 Unsprung wheel-rail separation ............................................. 205
5.2.2 Unsprung finite element solution for unsprung moving mass ........... 207
5.2.3 Modal superposition multiple unsprung masses traversing beam...... 212
5.3 Validating the Unsprung Mass Systems ...................................................... 216
5.3.1 Wheel as a moving unsprung load traversing a cantilever beam ....... 216
5.3.2 Wheel as a moving unsprung mass traversing a cantilever beam ...... 218
5.3.3 Moving unsprung system traversing a simply supported beam ......... 224
5.3.4 Unsprung wheel system at wide range of speeds ............................... 229
5.3.5 Sensitivity analysis of the unsprung systems ..................................... 230
5.3.6 Multiple unsprung vehicles traversing a simply supported beam ...... 236
5.4 Application to the Boyne Viaduct ............................................................... 238
5.4.1 Unsprung wheel traversing Boyne Viaduct modelled as a beam ....... 238
5.4.2 Unsprung wheel traversing two-dimensional Boyne Viaduct ........... 242
5.4.3 Multiple vehicles traversing two-dimensional Boyne Viaduct .......... 247
5.4.4 Multiple vehicles traversing three-dimensional Boyne Viaduct ........ 251
5.5 Discussion of results and Conclusions ........................................................ 255
WHEEL RAIL SYSTEMS ON IRREGULARITIES .......................................... 259
6.1 Introduction ................................................................................................ 259

ix
6.2 Development of Irregularity models ............................................................ 261
6.2.1 Sprung wheel incorporating rail irregularities – WRC model ............ 261
6.2.2 Unsprung wheel incorporating rail irregularities – Modal model ...... 264
6.2.3 Unsprung wheel incorporating rail irregularities – FEM model ........ 268
6.2.4 Sprung wheel incorporating lateral rail irregularities ......................... 271
6.3 Validating systems with irregularities ......................................................... 274
6.3.1 Static analysis of rigid rail with irregularities .................................... 275
6.3.2 Transient analysis of beam and rigid rail with irregularities .............. 275
6.3.3 Manchester Benchmark simulation using author’s models ................ 280
6.4 Boyne Viaduct with irregularities along its rails ......................................... 288
6.4.1 Train model undergoing in-phase irregularities on each rail .............. 289
6.4.2 Train model undergoing out-of-phase irregularities on each rail ....... 295
6.4.3 Train model undergoing random irregularities on each rail ............... 301
6.4.4 Boyne Viaduct with lateral irregularities in-phase on each rail ......... 306
6.5 Discussion of results and Conclusions ......................................................... 311
CONCLUSIONS & RECOMMENDATIONS ...................................................... 313
7.1 Thesis Summary & Conclusions .................................................................. 313
7.2 Recommendations for future work .............................................................. 318
CONVENTION & ELASTIC BEAM THEORY .................................................. 319
A.1 Introduction ... .............................................................................................. 319
A.2 Conventions .............................................................................................. 319
A.2.1 Convention for coordinate axes ......................................................... 319
A.2.2 Convention for moments .................................................................... 320
A.2.3 Convections for internal forces and moments of a beam ................... 321
A.2.4 Convention for stresses ...................................................................... 322

x
A.3 Moment-Curvature Relationship ................................................................. 323
A.4 Differential equations governing the transverse deformation of a beam ..... 328
A.5 Differential equations governing the longitudinal deformation of a beam .... 333
A.6 Differential equations governing the tensional deformation of a beam ...... 336
FEM APPLIED TO EQUATION OF MOTION OF A BEAM .......................... 341
B.1 Introduction .. .............................................................................................. 341
B.2 Beam element in the x-y plane ..................................................................... 341
B.3 Beam element in the x-z plane ..................................................................... 350
B.4 Beam element along x-axis .......................................................................... 357
B.5 Beam element subjected to torque about the x-axis .................................... 362
B.6 Structural beam element .............................................................................. 365
B.7 Transformation from local to global axes.................................................... 367
B.8 Rotating the element equation from local to global coordinates ................. 374
B.9 Equilibrium of the joints – Assembly .......................................................... 377
B.10 Applying rotations to axial elements ........................................................... 380
B.11 Equation for the axial extension of a spring element .................................. 384
NATURAL FREQUENCIES AND MODAL SHAPES FOR A BEAM ............. 387
C.1 Mode shape for any beam ............................................................................ 387
C.2 Cantilever beam – Natural Frequencies and Mode Shapes ......................... 391
C.3 Fixed-Fixed beam – Natural Frequencies and Mode Shapes ...................... 397
C.4 Simply supported beam – Natural Frequencies and Mode Shapes ............. 401
C.5 Dimensionless speed ratio α for a simply supported beam ......................... 405
EQUATION FOR DAMPING ................................................................................ 413
D.1 Introduction .. .............................................................................................. 413
D.2 Viscous damping ......................................................................................... 413

xi
D.3 Numerical damping ...................................................................................... 419
NEWMARK TIME INTEGRATION SCHEME .................................................. 423
E.1 Introduction ... .............................................................................................. 423
E.2 Newmark time integration ........................................................................... 423
E.3 Defining the parameter γ and β .................................................................... 427
BOYNE VIADUCT - TECHNICAL PARAMETERS ......................................... 429
F.1 Dimensions & Geometrical Properties ........................................................ 429
F.2 Static analysis of an unloaded Boyne Viaduct ............................................. 434
F.3 Representing a truss as a simply supported beam ........................................ 434
F.4 Modal analysis of the Boyne Viaduct railway bridge .................................. 436
RAILWAY VEHICLE DYNAMICS ..................................................................... 439
G.1 Introduction ... .............................................................................................. 439
G.2 Axle spacing and weights as a moving force ............................................... 440
G.3 Axle positioning for maximum loading of Boyne Bridge ........................... 442
G.4 Exact model with overlapping time functions ............................................. 444
G.5 Vehicle dimensions and parameters............................................................. 447
G.6 Modal analysis of the railway vehicles ........................................................ 457
REFERENCES ....................................................................................................... 463
BIBLIOGRAPHY .................................................................................................... 472

xii
LIST OF SYMBOLS AND ABBREVIATIONS
The following is the list of symbols and abbreviations used throughout this thesis. All
the symbols are defined at the place they appear in the text. Vector-matrices are
defined by bold letters; bold lower case letters indicate local coordinate system, while
bold upper case letters indicate global coordinate system. A dot placed over a quantity
denotes the derivative with respect to time variable t, while a dash attached to a
quantity denotes the derivative with respect to spatial variable x.
Upper Case Times New Roman
A Area
wA distance between two axle of a single bogie
wB distance between bogies of a single carriage
SC global damping matrix of the entire structure
wC distance between the rear wheel of one carriage and the front
wheel of the following carriage behind it
wD distance between the front wheels of consecutive carriages
E young’s modulus of Elasticity
xE unit vector parallel to the global x-axis
yE unit vector parallel to the global y-axis
zE unit vector parallel to the global z-axis
bF force applied to a bogie
wF force applied to a wheel

xiii
vF force applied to a vehicle body
LxjF global horizontal force in Hertzian spring at local node;j = 1, 2
LyjF global vertical force in Hertzian spring at local node; j = 1, 2
( )F t force due to the unsprung mass
F global force vector of a single finite element
SF global force vector of the entire structure
G weight of the bridge
G shear modulus of Elasticity
( )jG χ rotational beam element shape functions at local node; j = 1, 2
( )jG χ′ 1st derivative of the rotational beam element shape functions with
respect to χ at local node; j = 1, 2
( )jG χ′′ 2nd derivative of the rotational beam element shape functions
with respect to χ at local node; j = 1, 2
( )jG χ′′′ 3rd derivative of the rotational beam element shape functions with
respect to χ at local node; j = 1, 2
( )jH χ linear shape functions at local node; j = 1, 2
( )xH Heaviside function
I second moment of inertia
I unit vector
pI polar moment of area about the y-axis
vI vehicle body mass moment of inertia
yI second moment of area about the y-axis

xiv
zI second moment of area about the z-axis
K global stiffness matrix of a single finite element
SK global stiffness matrix of the entire structure
11LK Upper left corner quadrant of the global (3x3) stiffness matrix
2 11LK Upper left corner quadrant of the global (2x2) stiffness matrix
2 12LK Upper right corner quadrant of the global (2x2) stiffness matrix
2 21LK Bottom left corner quadrant of the global (2x2) stiffness matrix
2 22LK Bottom right corner quadrant of the global (2x2) stiffness matrix
L total length of the beam
M bending moment
M global mass matrix of a single finite element
SM global mass matrix of the entire structure
ˆjM bending moment of element at local node; j = 1, 2
bM bogie mass
vM vehicle body mass
wM wheel mass
xM bending moment about the x-axis
yM bending moment about the y-axis
ˆyjM bending moment about y-axis at local node; j = 1, 2
zM bending moment about the z-axis
ˆzjM bending moment about z-axis at local node; j = 1, 2
cN number of railway carriages

xv
( )jN χ transverse beam element shape functions at local node; j = 1, 2
( )jN χ′ 1st derivative of the transverse beam element shape functions
with respect to χ at local node; j = 1, 2
( )jN χ′′ 2nd derivative of the transverse beam element shape functions
with respect to χ at local node; j = 1, 2
( )jN χ′′′ 3rd derivative of the transverse beam element shape functions
with respect to χ at local node; j = 1, 2
P moving point force
P axial force parallel to the x-axis
1P point force from the front wheel of the first carriage
jP point force from the front wheel of carriage j
ˆjP axial force in the x-direction at local node; j = 1, 2
xP global x components of a unit vector
yP global y components of a unit vector
zP global x components of a unit vector
Q shear force
jQ point force from the second wheel of carriage j
ˆjQ shear force of element at local node; j = 1, 2
yQ shear force parallel to the y-axis
ˆyjQ shear force in y-direction at local node of element; j = 1, 2
zQ shear force parallel to the z-axis
ˆzjQ shear force in z-direction at local node of element; j = 1, 2

xvi
jR point force from the third wheel of carriage j
( )nR t transverse and rotational displacement; n = 1 to 4
( )nR t& transverse and rotational velocity; n = 1 to 4
( )nR t&& transverse and rotational acceleration; n = 1 to 4
0R rotation matrix
Rα rotation α about the y-axis
Rβ rotation β about the z-axis
Rγ rotation γ about the x-axis
jS point force from the fourth wheel of carriage j
T moment about the x-axis i.e. torque
ˆjT torque about x-axis at local node of element; j = 1, 2
T transformation matrix
jU global displacement in x-direction at local node; j = 1, 2
jU&& global acceleration in x-direction at local node; j = 1, 2
LxjU global displacement of the Hertzian spring in the x-direction
at local node; j = 1, 2
LyjU global displacement of the Hertzian spring in the y-direction at
local node; j = 1, 2
U global nodal displacement vector of a single finite element
SU global displacement vector of the entire structure
SU& global velocity vector of the entire structure
U&& global nodal acceleration vector of a single finite element

xvii
SU&& global acceleration vector of the entire structure
jV global displacement in y-direction at local node; j = 1, 2
jV&& global acceleration in y-direction at local node; j = 1, 2
jW global displacement in z-direction at local node; j = 1, 2
jW&& global acceleration in z-direction at local node; j = 1, 2
X global coordinate
( )X t horizontal position of the unsprung mass at time t
( ), ,m j k
X t horizontal position of the m-th wheel of the k-th bogie
of the j-th carriage of the train at time t
Y global coordinate
( )Y t vertical position of the unsprung mass
Z global coordinate
Lower Case Times New Roman
a acceleration of the vehicle
na frequency coefficient
c vehicle speed
c viscous damping
0c initial speed of the vehicle
1c primary suspension damping
2c secondary suspension damping
crc critical speed of vehicle
dA infinitesimal area

xviii
dx infinitesimal length in the x-direction
dy infinitesimal length in the y-direction
dz infinitesimal length in the z-direction
e extension
xe unit vector parallel to the local x-axis
ye unit vector parallel to the local y-axis
ze unit vector parallel to the local z-axis
f local nodal force vector of a single finite element
jf natural frequency of the beam in Hz; j = 1, 2 …
( )nf t time function
g gravity
i node number along the beam
mi contact node number using contact elements
1k primary suspension stiffness
2k secondary suspension stiffness
Hk Hertzian spring stiffness
k local stiffness matrix of a single finite element
l local length of an element
rl distance along rigid rail
m mass per unit length
( ),xm x t torque moment about the x-axis
m local mass matrix of a single finite element
j
xp local x components of unit vector due to rotation; j = α, β, γ

xix
j
yp local y components of unit vector due to rotation; j = α, β, γ
j
zp local z components of unit vector due to rotation; j = α, β, γ
( ),p x t pressure force acting over a length x for time t
( ),xp x t axial load parallel to x-axis
( ),yp x t transverse load parallel to y-axis
( ),zp x t transverse load parallel to z-axis
( )tp horizontal and vertical components of the unsprung mass
r radius of a circle measured in radians
( )nr t displacement coefficient
( )nr t& velocity coefficient
( )nr t&& acceleration coefficient
r unit vector
t time variable
jt time of the jth carriage arriving on the beam
u beam displacement in the x-direction
ju beam displacement in x-direction at local node; j = 1, 2
ju&& beam acceleration in x-direction at local node; j = 1, 2
Bju beam displacement in the x-direction at local node; j = 1, 2
( )Bu χ beam displacement in the x-direction at position χ
u local nodal displacement vector of a single finite element
u&& local nodal acceleration vector of a single finite element
v beam displacement in the y-direction

xx
jv beam displacement in y-direction at local node; j = 1, 2
jv&& beam acceleration in y-direction at local node; j = 1, 2
( )Bv χ beam displacement in the y-direction at position χ
Bjv beam displacement in the y-direction at local node; j = 1, 2
w beam displacement in the z-direction
jw beam displacement in z-direction at local node; j = 1, 2
jw&& beam acceleration in z-direction at local node; j = 1, 2
x beam coordinate
1x beam coordinate to the first node on the beam
ix beam coordinate to node i on the beam
Lx beam coordinate to the last node on the beam
y beam coordinate
z beam coordinate
Greek symbols
α dimensionless speed ratio
α beam rotation about the y-axis
0α Raleigh damping constant applied to the global mass matrix
1α Raleigh damping constant applied to the global stiffness matrix
β beam rotation about the z-axis
χ local distance coordinate in the finite element method
δ Dirac Delta function
inδ Kronicor Delta function

xxi
xδθ weighting function about the x-axis
uδ weighting function in the x-direction
vδ weighting function in the y-direction
wδ weighting function in the z-direction
xxε linear strain in the x-direction
xyε shear strain on x-face in the y-direction
xzε shear strain on x-face in the z-direction
( )n xφ n-th characteristic mode shape
( )( )n X tφ characteristic mode shape at the unsprung mass position
( )( )n X tφ′ first derivative of the characteristic mode shape with respect to x
at the unsprung mass position
( )( )n X tφ′′ second derivative of the characteristic mode shape with respect to
x at the unsprung mass position
ϕ phase angle
γ beam rotation about the x-axis
ν Poisson’s ratio
xθ rotation of the beam’s cross-section about the x-axis
xjθ rotational displacement about x-axis at local node; j = 1, 2
xjθ&&
rotational acceleration about x-axis at local node; j = 1, 2
yθ rotation of the beam’s cross-section about the y-axis
ˆyjθ rotational displacement about y-axis at local node; j = 1, 2
ˆyjθ&&
rotational acceleration about y-axis at local node; j = 1, 2

xxii
zθ rotation of the beam’s cross-section about the z-axis
zjθ rotational displacement about z-axis at local node; j = 1, 2
zjθ&&
rotational acceleration about z-axis at local node; j = 1, 2
Bjq beam rotational displacement local node; j = 1, 2
zjθ rotational displacement about z-axis at local node; j = 1, 2
xσ normal stress acting on the x-face in x-direction
yσ normal stress acting on the y-face in y-direction
zσ normal stress acting on the z-face in z-direction
xyτ shear stress acting on the x-face in the y-direction
xzτ shear stress acting on the x-face in the z-direction
yxτ shear stress acting on the y-face in the x-direction
yzτ shear stress acting on the y-face in the z-direction
zxτ shear stress acting on the z-face in the x-direction
zyτ shear stress acting on the z-face in the y-direction
jω frequency of the beam in rad/sec; j = 1, 2 …
bω damping frequency
byω damping frequency parallel to the y-axis
bzω damping frequency parallel to the z-axis
dω frequency of damped oscillation
iξ damping ratio
ψ vector of order n

xxiii
iψ mode shape associated with the eigenvalue
t∆ time taken for a wheel to traverse a beam element
, ,j k m∆ distance between carriages, bogies and wheels
( )n xΦ beam element shape functions; n = 1 to 4
( )( )n X tΦ beam element shape functions at the unsprung mass position
( )( )n X t′Φ first derivative of the beam element shape functions with respect
to x at the unsprung mass position; n = 1 to 4
( )( )n X t′′Φ second derivative of the beam element shape functions with
respect to x at the unsprung mass position; n = 1 to 4
( )( )n X t′′′Φ third derivative of the beam element shape functions with respect
to x at the unsprung mass position; n = 1 to 4
ˆxjΘ global rotational displacement about x-axis at local node; j = 1, 2
ˆxjΘ
&& global rotational acceleration about x-axis at local node; j = 1, 2
ˆyjΘ global rotational displacement about y-axis at local node; j = 1, 2
ˆyjΘ
&& global rotational acceleration about y-axis at local node; j = 1, 2
ˆzjΘ global rotational displacement about z-axis at local node; j = 1, 2
ˆzjΘ
&& global rotational acceleration about z-axis at local node; j = 1, 2
1Ω forcing frequency of the vehicle
Abbreviations
LHS left hand support, Chap 3
RHS right hand support, Chap 3

xxiv
LN1 local node 1, Chap 3
LN2 local node 2, Chap 3
ANSYS CE ANSYS node-to-surface contact element, Chap 3
DAFU dynamic amplification factor of the bridge deflection, Chap 3
DAFA dynamic amplification factor of the bridge axial force, Chap 3
IF impact factor, Chap 3
W1 front wheel of the locomotive, 1st wheel of train, Chap 4
W7 front wheel of first railway coach, 7th wheel of train, Chap 4
V1 node on vehicle body of the locomotive, Chap 4
V2 node on vehicle body of the first railway coach, Chap 4
WRC wheel-rail contact, Chap 4
FEM finite element model used for the unsprung mass, Chap 5

Chapter 1 - Introduction
1
Chapter 1
Introduction
1.1 Background & motivations
For several decades, research on the dynamic response of trains and railway bridges
has become an important topic in civil engineering. Engineers and researchers have a
responsibility for ensuring the safe passage of trains traversing rails and railway
bridges by carrying out extensive research on existing structures. Much of the
dynamic response, which the bridge and vehicle experience, is contributed to by the
contact that exists between the wheel and the rail. Therefore, by modelling the
different wheel-rail conditions, one can better understand the dynamic response of
vehicles and railway bridges.
The different wheel-rail conditions are modelled in finite element programs, such as
ANSYS, by means of contact elements. These contact elements are defined as:
Special finite elements that describe the contact between two bodies, of
which one can move in space, henceforth called the wheel, and the other is
fixed to the ground, henceforth called the rail (Schwab & Meijaard, 2002).

Chapter 1 - Introduction
2
Contact elements are used to constrain the vertical, horizontal and lateral positions of
the wheel as it traverses the rail as well as calculate the contact or compressive force
between the wheel and rail. On occasion, wheels of a train can experience a zero
contact force, when there is a loss of contact between the wheel and the rail. In these
circumstances, the position of the wheel relative to the rail is still measured by the
extension of the contact elements.
The original aim of this research was the study of the dynamic interaction of trains
and railway-bridges, where the ANSYS contact element was to be used to model
wheel-rail interactions. The Boyne Viaduct is the particular bridge of interest to the
author. However, it was discovered that the ANSYS contact element was unable to
model wheel and rail irregularities and braking. Therefore, the author developed a
wheel-rail contact (WRC) element which resulted in three stiffness matrices. The
author could input these matrices to the ANSYS program. This development is
discussed in greater detail in the following chapters and allows the author to
investigate the following rail scenarios:
• Smooth-rail condition
• Wheel & rail irregularities
• Wheels travelling on a rigid rail
• Wheel losing contact with rail
• Braking & accelerating effects
• Lateral effects on the vehicle
The author was able to address the list of scenarios above at the annual UK ANSYS
User Conference in Warwick in 2002 (Bowe & Mullarkey, 2002).

Chapter 1 - Introduction
3
The numerical models developed in this study are validated using the results from the
literature. In many cases, the bridges consist of beams. The Boyne Viaduct railway-
bridge, located on the Dublin-to-Belfast line in Drogheda, provides a complex three-
dimensional structure on which to test the author’s models.
Besides the WRC model, this thesis also models a moving unsprung mass traversing a
beam or rail. This differs from the moving sprung mass where the spring is simulated
by either the ANSYS contact elements or the WRC element. The unsprung mass has
no spring. The vertical acceleration of the unsprung mass is the sum of the vertical
acceleration of the bridge and a convective acceleration. In the Biggs (1964) and Akin
& Mofid (1989) moving unsprung model, the convective acceleration is omitted from
the model; thus their solution is inaccurate. Nevertheless, many authors are still
comparing the results of their models to this inaccurate solution and are ignoring
convective acceleration. This thesis derives both a modal and finite element model
incorporating a moving unsprung mass and an irregular rail.
1.2 ANSYS Strengths & Weaknesses
In the initial stages of this study it seemed very advantageous for the author to use the
ANSYS finite element program to model the bridge-train systems, as this is a multi-
purpose finite element program that is used worldwide. The author required a finite
element program with static, modal and transient analysis capabilities so that one
could simulate the effects of trains traversing rails and railway bridges. Some of the
reasons for choosing ANSYS the finite element program were:

Chapter 1 - Introduction
4
• Element Library – The program has a large library of structural elements that
would be required by the author. Two-dimensional and three-dimensional
elastic beam elements [BEAM3 & BEAM4] could model beams, rail and
vehicle components, while lumped mass elements [MASS21] would be used
to simulate the wheels of the vehicle. Suspension springs between the wheels
and the vehicle components would be represented by spring damper elements
[COMBIN14], whereas node-to-surface contact elements [CONTAC48]
would be used to model the wheel-rail interaction. Another element that
proved invaluable later in this study is the matrix element [MATRIX27]. This
is an empty 12x12 mass, stiffness or damping matrix created for any pair of
nodes and has been utilized extensively throughout to simulate the WRC
element as well as the modal and the finite element models incorporating the
moving unsprung mass.
• Equation Solvers – In the solution phase of the analysis, equation solvers are
used to solve the set of simultaneous equations that are generated in the finite
element model. For transient analysis one uses the linear solver Newmark-β
for time integration.
• Result as a function of time – Since the majority of the author’s studies
involve transient analyses, one requires the results to be plotted as a function
of time. These results would include deflections, contact forces, axial forces
and bending moments.
• APDL Code – ANSYS Parametric Design Language or APDL is a scripting
language that allows the author to automate common tasks and build models in

Chapter 1 - Introduction
5
terms of parameters. Mastering the APDL code can be tedious, but the rewards
are immense. Like other computer languages it has a wide range of features
such as macros, conditional branching, do-loops, and scalar, vector and matrix
operations.
Thus far one has discussed advantages of ANSYS. However, ANSYS has many
limiting features, which the author eventually overcame. ANSYS limitations include:
• No point force between nodes – In the early stages of the research, moving
point forces were use to model the train wheels traversing a beam or rail.
However, the author discovered that ANSYS can only apply point forces to
nodes along the beam. Point forces could not be applied between the nodes.
The author developed a system whereby forces and moments are applied to the
two nodes of a beam element as a function of time to represent the point force
travelling between these two nodes.
• Contact element cannot model irregularities – Both the two-dimensional
and three-dimensional node-to-surface contact elements [CONTAC48 &
CONTAC49] are unable to simulate wheel or rail irregularities. These
elements can only model smooth-rail conditions. Fortunately with the aid of
the empty 12x12 stiffness matrix [MATRIX27] in ANSYS, the author was
able to develop a wheel-rail contact element incorporating wheel and rail
irregularities.

Chapter 1 - Introduction
6
• Three-dimensional contacts required a surface area – Another drawback of
using the three-dimensional node-to-surface contact elements [CONTAC49]
was that one has to model the rail as a solid block element instead of as a
beam element. In addition, CONTACT49 neglects the lateral support of the
wheels. Using the author’s wheel-rail contact element, one was able to model
the vertical, longitudinal and lateral effects of the wheel on a three-
dimensional beam element.
• Real constant cannot be specified as a function of time – Since the real
constant values, i.e. section properties of the element, cannot be specified as a
function of time within ANSYS, the author has to update these constraints by
stopping and starting the ANSYS program. The real constant values in the
matrix elements [MATRIX27] need to be updated at every timestep. The real
constant values in the matrix elements change when the position of the wheel
changes.
1.3 Chapter Summary
Chapter 2 consists of a discussion of other researchers’ work related to the author’s
study. The chapter is designed to give the reader some insight to this project by
examining different approaches to modelling wheel-rail interaction and how they
differ from the author’s systems. One also examines other aspects of this study, such
as the dynamic response of the vehicle and railway-bridge.
A procedure that represents the wheels of a train as a series of moving forces is
presented in Chapter 3. Forces are applied to nodes along the bridge or beam as a

Chapter 1 - Introduction
7
function of time to simulate the passage of the train. This system was developed
because the author could not apply point forces between nodes in ANSYS. Originally
the technique was setup so that a beam finite element never had to support more than
one point force. Thus a large number of closely spaced wheels of a train would
require a large number of bridge elements and nodes. This increased the execution
time of the analysis. Later, one was able to allow one element to support several point
forces using APDL code. This dramatically reduced the number of nodes in the model
and resulted in a quicker execution time. Moving force models are generally
allowable if the mass of the vehicle is substantially less than the mass of the bridge.
One can then ignore the inertia effects.
The wheel-rail contact (WRC) element is developed by the author in Chapter 4. This
system involves modelling each wheel as a point mass at the centre of the wheel. The
contact element is then placed between the point mass and the rail. The contact
element uses three stiffness matrices to model the contact. The first stiffness matrix is
for the two nodes of the beam element, the second stiffness matrix is for the first local
node of the beam element and the centre node of the wheel and the third stiffness
matrix is for the second local node of the beam element and the centre node of the
wheel. The non-zero values inputted into these stiffness matrices are a combination of
the contact spring stiffness and beam element shape functions, evaluated at the
wheel’s position. The author compares and contrasts the results using the spring
element contact with the results using the node-to-surface contact elements
[CONTAC48] within ANSYS in order to validate the model. Published results and
analytical results are also used for comparison purposes. The author also develops
both the longitudinal and lateral spring elements to support the wheel longitudinally

Chapter 1 - Introduction
8
and laterally. Thus accelerating and braking forces as well as traverse loadings are
possible. The lateral spring elements provide lateral support to the wheels of the
vehicle in three-dimensional analyses.
In Chapter 5 the author examines an alternative to the sprung mass wheel system,
namely the unsprung mass wheel system. The wheel is assumed to be permanently
attached to the beam and cannot separate from it. Thus both the local and convective
accelerations of the unsprung mass must be taken into account. In this chapter, the
author develops both a modal and finite element model incorporating the moving
usprung mass. Both systems have many similarities. The modal method uses modal
characteristic shapes and displacement coefficients, while the finite element solution
uses element shape functions and displacement values at nodes to represent
displacements at all points of the beam. While computing the convective acceleration
terms for the unsprung mass, one must take second derivatives. In the finite element
solution, the second derivative of the element shape function becomes discontinuous
at the nodes. In the modal method, there are no nodes and the second derivative of the
modal characteristic shapes remains continuous at all times. The difference between
the modal and finite element model occurs in the representation of the stiffness
matrix. Integration by parts gives the finite element stiffness matrix a different form to
the modal stiffness matrix
Until now one has considered smooth rail conditions. In Chapter 6, the sprung and
unsprung systems are extended to include the effects of irregularities along the rail.
The author uses a deterministic approach for modelling the irregularity function.
Irregularities on the rail can lead to wheels of a vehicle losing contact with the rail.

Chapter 1 - Introduction
9
This can occur when the extension in the wheel-rail contact (WRC) element for a
particular wheel becomes positive, and all the values in the stiffness matrices related
to that wheel become zero. As a train traverses the rails, the railway carriage can also
experience pitching motion if irregularities on both rails are the same and in-phase or
rolling motion when irregularities on the rails are out-of-phase. This can lead to a
reduction of the passenger riding comfort. In addition, one also modifies the moving
unsprung mass to incorporate the effects of irregularities for both the modal and finite
element systems. The final chapter summarizes the results given in this study as well
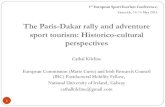
as making recommendations for further research in this area. The key themes
examined by the author in this thesis can be seen in Figure 1.1.
The reader should also refer to the Appendices for all technical data and structural
theories discussed in this study. In particular, Appendix A establishes a consistent
sign convention; it develops moment-curvature relationships as well as deriving the
Bernoulli-Euler differential equation for an elastic beam and spring, while Appendix
B then applies the finite element method to the developed differential equations for
the beam and spring. The natural frequencies and modal shape functions for a
cantilever beam, encastre beam and simply supported beam are then derived in
Appendix C, while the equation of damping and Newmark time integration scheme
are derived in Appendix D and E, respectively. Technical bridge parameters related to
the Boyne Viaduct are given in Appendix F, while railway vehicle dynamics related
to the author’s vehicle model is given in Appendix G.

Chap
ter 1 - In
trod
uctio
n
10
Hertzian springbottom of
No Seperationstiffness equal to infinite using MATRIX27
Seperation
Lateral3D structures
Longitudinalbraking effects
implementation
Constraint
Horizontal
including irregularities
Contact
HertzianStiffnessStiffness
Non-Hertzian
WheelInertia
using MASS21
WheelInertia
local & convective acceleration
Vehicleincluding railway carriages
WheelSingle
WheelsMultiple
Forceweight of wheel
Beam
using BEAM4
FEM
using MATRIX27
ModesAnalytical
2D Truss3D Boyne
centre ofthe wheel
Chap 3
Chap 4
All Chap All Chap
Chap 4
using Newmark-B
Transient
Chap 5 Chap 4
All ChapAll ChapAll Chap
Chap 4Chap 5
Chap 4Chap 5
Chap 4Chap 5All Chap
All Chap
All Chap
Chap 5
Fig
ure 1
.1
Key th
emes exa
min
ed in
this th
esis

Chapter 2 – Literature Review
11
Chapter 2
Literature Review
2.1 Introduction
The dynamic interaction of trains and railway bridges has several components. These
components are the vehicle and its characteristics; the bridge and its characteristics;
the wheel-rail interaction including the effects of wheel and rail irregularities. In this
chapter, the author discusses each component separately using the literature. Varying
certain parameters of each component can have a significant effect on the overall
outcome of the problem, e.g. increasing the vehicle speed generally increases the
maximum dynamic deflection of bridge.
2.2 Modelling Railway Vehicles
2.2.1 History of Railway Vehicle Dynamics
According to Esveld (2001), an Englishman by the name of Trevithick constructed the
first ever steam locomotive in the early nineteenth century. However, it would take
several decades, and a railway bridge disaster, before any theoretical or experimental
studies of railway bridges dynamics would commence. In 1847 following the collapse
of the Chester Railway Bridge in England two pioneers emerged to study railway

Chapter 2 – Literature Review
12
bridges (Yang et al., 2004). These early pioneers were Willis and Stokes. Willis
solved the problem of a moving load crossing a simply supported beam such that the
mass of the beam is substantially less than the mass of the vehicle, while Stokes was
first to obtain experimental data related to this problem (Fryba, 1999).
Not until the early twentieth century did Krylov, Zimmermann and Timoshenko begin
studying the problem of a single concentrated load crossing a simply supported beam
(Fryba 1996). Their studies assumed that the mass of the vehicle was substantially
less than the mass of the beam and ignored vehicle inertia. However, Akin & Mofid
(1989) pointed out that, by ignoring the inertia of the vehicle whose mass is about the
same as the mass of the bridge, there could be an error of 20 to 80% in the dynamic
deflection of the bridge. The error depends on the mass velocity and boundary
conditions of the beam, although their model only took into account the local
accelerations of a moving unsprung mass. In 1921, Saller was first to study both the
gravitational and inertial effects of the moving vehicle crossing a bridge structure. His
work was followed by Jeffcott in 1929, by Steuding in 1934 and by Odman in 1948,
according to Fryba (1999).
The classical study of pulsating or harmonic loads traversing a simply supported beam
at a constant speed is credited to Timoshenko in 1922, while Inglis provided a much
more detailed study in 1934. This was to represent the harmonic action of unbalanced
counterweights of the driving wheels of steam locomotives (Fryba, 1996). Inglis
(1934) examined the dynamics of a steam locomotive traversing a railway bridge both
theoretically and experimentally. This included the motion of the bridge subjected to a
concentrated load, sprung and unsprung masses and a harmonic force crossing a
beam.

Chapter 2 – Literature Review
13
Fryba (1999) tells that Hillerborg was first to solve the problem of a motion of a
sprung mass crossing a simple beam by means of Fourier’s method and the method of
numerical difference in 1951. With the introduction of digital computers, further
advances in this topic were made possible. Using Hillerborg’s method, Tung et al.
(1956) solved the vibration of highway bridges, while Biggs et al. (1959) utilized
Inglis’s method.
Apart from the initial fundamental models, there have been many studies of railway
vehicle dynamics by recognised researchers (Biggs, 1964; Chu et al., 1979; Garg &
Dukkipati, 1984, Esveld, 1989; Akin & Mofid, 1989; Yang & Yau, 1997; Fryba,
1999, Esveld, 2001; Iwnicki, 2006). These authors have modelled realistic bridges
and trains, where the trains can travel at high speed or at variable speeds.
2.2.2 Vehicle Model
This section briefly discusses the different types of vehicle models used by the author
in this thesis to simulate a train traversing a railway bridge.
2.2.2.1 Moving Constant Force
Perhaps the most common and simplest vehicle model comprises several moving
constant point forces i.e. only the weight of the train is taken into account. This type
of vehicle model is generally associated with railway bridges of medium or large
spans (> 30m) because the mass of the bridge tends to be substantially greater than the
mass of the vehicle.

Chapter 2 – Literature Review
14
When it comes to solving this problem, there are many different solutions available.
Fryba (1999) solves the problem using a Fourier integral transformation of the
equation of motion of the beam. The same procedure is also adopted by Green &
Cebon (1994), Yang et al. (1997) and Wang et al. (2003). Biggs (1964) uses a series
of beam modes to calculate the deflection of the beam due to the moving force. This
amounts to Fryba’s solution. A finite element procedure whereby linear forces are
applied to every node along a beam as a function of time to represent the moving
constant force is presented by Bowe & Mullarkey (2000). A study by Wu et al. (2000)
represents the moving constant force as forces and moments applied to the nodes of
the beam as a function of time. In Yang et al. (1997) as well as Yau & Yang (2006)
and Garinei & Risitano (2008), the timing issue of several moving loads arriving on a
beam are handled by Heaviside functions.
2.2.2.2 Weight and Mass of Moving Wheel
There is greater complexity when both the gravitational and inertia effects are
included. Throughout the literature, the wheel mass can be modelled as a sprung or
unsprung mass. Some authors (Akin & Mofid, 1989; Biggs, 1964; Chatterjee et al.,
1994; Lee 1998; Yang et al., 1997; Yang & Wu, 2001) model the wheel as an
unsprung mass always in direct contact with the beam. Thus the deflection of the
wheel and beam are equal at the point of contact. Other authors (Esveld, 1989; Zhai
& Cai, 1997; Zhang et al., 2001; Sun & Dhanaekar, 2002; Iwnicki, 2006; Liu et al.,
2008) place a Hertzian spring between the wheel and the beam. Hence, the deflection
of the wheel and beam differ at the point of contact. Since the wheel and rail share a
common contact point in the unsprung system, convective velocity and acceleration
terms are needed for the wheel.

Chapter 2 – Literature Review
15
This is not applicable to the sprung system. Fryba (1996) adds convective terms but
many authors such as Biggs (1964), Akin & Mofid (1989) and Yang et al. (2004) do
not. Unlike the unsprung mass, wheels that are separated from the rail by a Hertzian
spring can separate from the rail when the spring becomes tensile. Such separation is
studied by Zhai & Cai (1997), Bowe and Mullarkey (2002), Sun & Dhanaekar (2002)
and Liu (2008).
2.2.2.3 Mass of the Moving Vehicle
The moving vehicle comprises wheels supporting a sprung vehicle by means of a
primary suspension. The suspension often consists of a spring dashpot as illustrated
by Biggs (1964), Chang & Liu (1996), Rieker et al. (1996), Green & Cebon (1997),
Cheng et al. (2001), Yang & Wu (2001) and Ju & Lin (2003). The force applied to the
beam by the moving vehicle is due to the gravitational and inertia effects of the
wheels and vehicle.
A typical railway vehicle can also consist of a vehicle body supported by a pair of
bogies, with each bogie supported by two axles and finally a pair of wheels supports
each axle. The bogies are connected to the axles and to the railway vehicle body,
respectively, through the primary and secondary suspension systems, with each
suspension consisting of a spring and dashpot similar to that presented by Garg &
Dukkipati (1984), Xia et al. (2000) and Esveld (2001). In Ireland, the locomotives
tend to be supported by twin bogies, with three axles supporting each bogie, while in
rest of Europe and around the world the number of axles supporting a locomotive can
vary.

Chapter 2 – Literature Review
16
Using the works of Garg & Dukkipati (1984), Xia et al. (2000) and Zhang et al.
(2008), one can describe the motion experienced by a three-dimensional railway
vehicle as it travels. Each wheelset of a vehicle has three degrees-of-freedom
(vertical, lateral and rolling motion), while each bogie and vehicle body has five
degrees-of-freedom (vertical, lateral, rolling, yawing and pitching motion), where the
rolling, yawing and pitching motion are defined as rotations about the x-axis, y-axis
and z-axis, respectively. Xia et al. (2000) models a three-dimensional, four-axle
railway vehicle using 27 degrees-of-freedom, while a similar two-dimensional railway
vehicle given by Au et al. (2002) is described by only 10 degrees-of-freedom. It
should be noted that in the two-dimensional model, only the vertical and pitching
motions of the vehicle are taken into account. Studies conducted by Zhang et al.
(2001) and Sun et al. (2003) have also examined the lateral motion of a railway
vehicle as it travels, while Yang et al. (1999) investigates the pitching motion of vehicles.
2.2.3 Vehicle Characteristics
Using the literature, one now discusses the different vehicle characteristic that can
greatly influence the outcome of the problem.
2.2.3.1 Vehicle Spacing
The importance of vehicle spacing is best illustrated in Yang et al. (1997), Fryba
(2001) and Yau & Yang. (2006). According to Fryba (2001), closely spaced axles or
vehicles can cause the resonant vibration of railway bridges, even at low speeds. The
speed, at which resonance is likely to occur on the bridge can be defined as the first
natural frequency of the bridge multiplied by the repetitive distance between axles,
bogies or railway vehicles traversing the bridge. According to Fryba (2001), medium

Chapter 2 – Literature Review
17
to large spanning bridges, with lower natural frequencies, that are subjected to short
railway vehicles are more susceptible to experiencing resonance vibration e.g. a 40 m
bridge with its first natural frequency equal to 2.5 Hz would resonate at a vehicle
speed of 27.8 km/hr if the repetitive distance between vehicles is equal to 3 m.
However, Li and Su (1999) states that if the number of vehicles traversing the bridge
is very small, resonances may not occur. Yang et al. (1997) observed that a condition
of cancellation that suppresses the resonant vibration of the bridge can occur when the
ratio of the bridge length to the repetitive distance of carriages coincides with the
following values 0.5, 1.5, 2.5, 3.5 etc, for a simply supported beam.
2.2.3.2 Vehicle speed
The next characteristic that one considers is the speed at which the vehicle travels. A
vehicle travelling along a bridge at a low speed behaves in a similar manner to a
stationary vehicle; thus the dynamic deflection experienced by the bridge can be low.
A vehicle travelling at a high speed can significantly increase the dynamic deflection
of the bridge. The maximum vibration of railway bridges can occur if certain critical
speeds are reached. Fryba (1999) calculates the critical speed of the vehicle as the
speed of the vehicle such that the vehicle travels a distance of twice the length of the
bridge in a time equal to the natural period of the bridge.
In Fryba (2001) vehicles travelling at a wide range of critical speeds across different
bridge lengths are studied. It is found from the study that the critical speeds often
exceed the speed even of high-speed vehicles e.g. a 40 m bridge with its first natural
frequency equal to 2.5 Hz would resonate at a vehicle speed of 720 km/hr.

Chapter 2 – Literature Review
18
Olsson (1985), Cheung et al. (1999) and Fryba (1999) have examined the effects of a
moving load, sprung mass and unsprung mass traversing a railway bridge at different
speeds. It is observed that the dynamic response of the bridge tends to increase with
the increasing vehicle speed. However, observations by Fryba (1999) have shown that
the dynamic response of the bridge can also decrease with increasing speed especially
at high speeds greater than the critical speed. Cai et al. (1994) finds that the maximum
deflection of a bridge occurs at less than 0.5 the critical speed for a moving force
model whereas the moving sprung mass system tends to have a maximum deflection
closer to a critical speed of 1. The resonant vibration of simply supported bridges
under high-speed trains has also been investigated by other authors such as Li and Su
(1999) and Xia & Zhang (2005). Findings from Xia & Zhang (2005) have shown that
derail factors and lateral wheel-rail forces of the vehicle also increase with the train
speeds.
2.2.3.3 Braking and accelerating of vehicles
When studying railway dynamics, most authors seem to be more concerned with the
vertical response of the bridge and vehicle; thus the vehicle traverses the bridge at a
constant speed. The horizontal response of the bridge and vehicle due to braking and
accelerating is often ignored. However, according to Esveld (2001) the horizontal load
resulting from a vehicle braking can often be as much as 25% of the vehicle’s weight,
found by multiplying the vehicle weight by the coefficient of friction of the vehicle.
In Fryba (1999), three different cases of a moving load traversing a bridge at variable
speeds are considered. Firstly, a vehicle travelling at a constant speed begins to
decelerate uniformly at the instant it arrives on the bridge (x0 = 0) such that it comes

Chapter 2 – Literature Review
19
to a complete stop at the end of the bridge (x = l). Secondly, a vehicle at rest (x0 = 0)
begins to accelerate uniformly such that it has a constant speed the instant it arrives at
the end of the bridge (x = l). Thirdly, A vehicle travelling at a constant speed begins to
decelerate uniformly at the instant it arrives on the bridge (x0 = 0) such that it comes
to a complete stop at the mid-span of the bridge (x = l/2). Fryba (1999) finds that the
uniform deceleration of the moving load crossing the bridge in the 1st and 3
rd example
results in a higher dynamic deflection than that of a uniform acceleration in the 2nd
example. In addition, Fryba (1999) remarks that there is little difference in the results
between 1st and 3
rd example even though the acceleration of the latter is twice the
former.
In Bowe & Mullarkey (2002), the effects of a locomotive braking along a railway
bridge are examined. The instant the front wheel of the locomotive enters a bridge,
travelling at a constant speed, it begins to decelerate uniformly such that the
locomotive comes to a complete stop when its front wheel reaches the end of the
bridge. As the wheels enter the bridge, it is shown that there is a significant increase
in the horizontal force experienced by the bridge support. Then as the locomotive
slows to a stop there is sudden drop in the force and finally it oscillates about its
equilibrium state. These observations were also made by Yang & Wu (2001).
Vehicles subjected to a forward or retard force in accordance with Newton’s 2nd
law
of motion can be used to model the acceleration and deceleration effects of a vehicle.
In Wang (1998), forward and retard forces are used to accelerate and decelerate a
moving mass traversing a simply supported beam.

Chapter 2 – Literature Review
20
2.2.3.4 Passenger Riding Comfort
In the study of railway vehicle dynamics, one is particularly interested in the
vibrations of the vehicle body as it travels, as these vibrations affect passenger riding
comfort. According to Yau et al. (1999), the vertical and lateral accelerations of the
vehicle body serve as a measure of the riding comfort. The maximum allowable
vertical acceleration adopted by France-SNCF is 0.49m/s2, while the Eurocode (1990)
has implemented a less stringent range of values. The level of passenger riding
comfort ranges from very good to acceptable in the Eurocode (1990). For the riding
comfort to be considered very good, the vertical acceleration must have a value less
than 1.0 m/s2, while a value less than 2.0 m/s
2 is deemed an acceptable. It is observed
in Yau et al. (1999) and Wu & Yang (2003) that the presence of track irregularity can
greatly affect the passenger riding comfort of the train, especially at medium to high
speeds.
A more detailed study into passenger riding comfort is presented in Garg & Dukkipati
(1984). These authors compute the ride quality and the comfort of the rail vehicle by
means of a ride factor, which comprises the vehicle acceleration amplitude and an
acceleration-weighting factor. According to Garg & Dukkipati (1984), a ride factor of
less than 1 gives a very good ride quality and a barely noticeable vibration comfort,
while a ride factor of greater than 4 provides an unacceptable ride quality and an
extremely unpleasant vibration comfort.
2.2.3.5 Ratio of between sprung vehicle mass and unsprung wheel mass
According to Fryba (1999), the ratio between the sprung vehicle mass and unsprung
wheel mass for a single moving sprung mass system tends to have little effect on the
dynamic amplification factor of bridges.

Chapter 2 – Literature Review
21
2.2.3.6 Ratio of the vehicle mass to bridge mass
The relationship between the vehicle mass P and bridge mass G becomes important in
structural dynamics when the vehicle mass is comparable to or greater than the mass
of the bridge, especially at high speeds (Inbanathan & Weiland, 1987). Fryba (1999)
demonstrates that as the vehicle to bridge mass ratio grows the dynamic response of
the bridge also increases. It should also be noted that as the P/G ratio becomes
significantly small, i.e. less than 0.2, the inertia effects of the vehicle are reduced;
hence, there is little difference between modelling the vehicle as a load and modelling
it as a mass traversing a beam as described in Gbadeyan & Oni (1995) and Ickikawa
et al. (2000).
2.3 Modelling Railway Bridges
This section focuses on the different railway bridge types used in this study and it also
discusses the bridge characteristics and how they can influence the dynamic behaviour
of the structure. The author is particularly interested in modelling the centre span of
the Boyne Railway Viaduct as a case study. This comprises a steel truss railway
bridge with a clear length of 80.77m between supports.
2.3.1 Railway Bridge Types
The main types of bridge structures that one focuses on in this study are beam and
truss railway bridges, while all other bridge types are less important.
2.3.1.1 Beam Railway Bridges
Perhaps the simplest and most commonly studied bridge type is a beam railway
bridge. Due to its simplicity many researchers, such as Cheung et al. (1999), Delgado

Chapter 2 – Literature Review
22
& Dos Santos (1997), Yang et al. (1997) and Bowe and Mullarkey (2005), use a
simply supported or cantilever beam model to validate their works before modelling
more sophisticated bridge structures. In these studies, the beam generally behaves in a
linear-elastic manner, with a constant beam mass per unit length. The model may
include damping. Fryba (1999) represents a truss railway bridge as a simply supported
beam using some simple calculations. Firstly, one calculates the mass of the beam per
unit length by dividing the total weight of the bridge structure G by the acceleration
due to gravity as well as the bridge length, while the cross-section areas of the upper
and lower chords of the truss at the appropriate truss height are used to compute a
suitable moment of inertia for the beam. Alternatively, if one knows the maximum
static deflection of the truss due to its own self-weight, one can calculate a suitable
moment of inertia for the beam using the beam deflection equation of a uniformly
distributed load.
2.3.1.2 Truss Railway Bridges
In the early days of railway bridge construction, steel riveted trusses were used
extensively on medium to large spanning structures. In modern times, with the
introduction of new construction methods and materials, the steel riveted truss railway
bridge has been superseded by bolted and welded structures. Nonetheless, many
existing railway bridge are steel riveted truss structures. Studies involving the
dynamic interaction of trains and steel truss bridges can be found in Chu et al. (1979),
Wiriyahai et al (1982), Garg & Dukkipati (1984), Wang et al. (1991), Delgado & Dos
Santos (1997) and Ermopoulos and Spyrakos (2006).
Presently, researchers examining steel riveted railway trusses are studying fatigue.
This is not an objective of the author’s project.

Chapter 2 – Literature Review
23
2.3.1.3 Suspension & Cable Stayed Bridges
Xia et al. (2000), Au et al. (2002) and Yau & Yang (2004) have carried out extensive
studies of trains traversing suspension and cable-stayed bridges; however, these types
of bridge structure are not included in the present study.
2.3.1.4 Boyne Viaduct Railway Bridge
As a case study, the Boyne Viaduct Railway Bridge located in Drogheda is examined,
which is located on the Dublin to Belfast railway line. Figure 2.1 presents the bridge
structure, which consists of two outer trusses and a central-curved truss supported by
masonry piers. A detailed description and historical assessment of the bridge can be
found in Howden (1930). The reader should refer to Appendix F for a more detailed
account of this bridge structure.
Figure 2.1: Boyne Viaduct Railway Bridge
A structural assessment of the Boyne Viaduct railway bridge subjected to a moving
locomotive is presented in Gallagher (2002). In this study, Gallagher uses a
FORTRAN based program to analyse the bridge-train system. Despite certain results
from this study proving to be inconclusive with other research literature, one can get a

Chapter 2 – Literature Review
24
good insight into the behaviour of the Boyne Viaduct railway bridge as vehicles
traverse it. In Majka et al. (2002), the Boyne Viaduct railway bridge is subjected to a
sprung vehicle with different Hertzian stiffness. It is found from this particular study
that varying the Hertzian stiffness has little effect on the bridge but significant effect
on the vehicle, especially for the riding comfort felt by the passengers.
2.3.2 Bridge Characteristics
Using the literature, one now discusses the different bridge characteristics that can
greatly influence the outcome of the problem.
2.3.2.1 Bridge Natural Frequency
Perhaps one of the most important dynamic characteristics in the study of railway
bridges is the natural frequency, as this indicates at which frequencies the bridge is
sensitive to dynamic loads. The unit of frequency is the Hertz (Hz), which is the
number of cycles or vibrations per second. The natural frequency of the bridge is a
function of its length, mass and bridge stiffness. In Appendix C, the author defines the
natural frequency for a simply supported, cantilever and fixed-fixed beam.
Alternatively, Fryba (1996) describes several empirical formulae to calculate the first
natural frequency of the bridge structure. Firstly, the natural frequency can be
computed empirically by dividing a value of 5.62 by the static deflection of the bridge
under its own self-weight, measured in centimetres. Secondly, one divides the value
of 250 by the length of the bridge. In addition, Fryba (1999) plots the first natural
frequency of steel railway bridges as a function of its span length. It is found that a
bridge with a length of 80.77 m has a natural frequency approximately equal to 3.2
Hz. Finally, the natural period of vibration T is computed as the inverse of the natural

Chapter 2 – Literature Review
25
frequency. In dynamics, it is recommended that the timesteps used in the integration
be a fraction of the shortest natural period of vibration being examined (usually a
tenth), so that natural frequencies in the model are not overlooked.
2.3.2.2 Bridge Damping
In structural dynamics, damping plays a vital role in reducing the dynamic response of
the structure as well as in causing a bridge to return to its state of equilibrium soon
after a vehicle has passed (Fryba, 1996). Bridges can have many sources of damping
ranging from the internal friction of the construction materials to the friction of
support bearings or joints. The assumption of viscous damping, used by many
researchers, is where the damping is proportional to the velocity of vibration of the
bridge (Fryba, 1999).
From an extensive study of railway bridges, Fryba (1996) found that there was very
little correlation between damping and the span, the bending stiffness, the deflection
due to the self-weight of the bridge, the dynamic stiffness and the first natural
frequency of the bridge. It was also noted that damping had little or no effect on
bridges with and without ballast.
Fryba (1996) uses several empirical formulae to compute the damping of the bridge
structure. In one such empirical formula, the damping is calculated using the length of
the bridge, while in another formula the natural frequency of the bridge is used.
In Yau et al. (2001), the effects of damping are examined on the resonance response
of a beam subjected to 30 moving loads. It is found from their study that the vibration

Chapter 2 – Literature Review
26
of a damped beam seems to remain in a stable manner, even under the conditions of
resonances, while the amplitude of the undamped beam tends to grow increasingly as
more loads traverse the beam. Kwon et al. (1998) present a paper on the vibration
control of bridges under moving loads using a tuned mass damper (TMD) installed in
the middle of the bridge. In their particular study, it is found that the maximum
displacement induced by a high speed train is decreased by 21% and free vibration
dies out rapidly with the introduction of the tuned mass damper.
When computing a suitable structural damping, many researchers such as Wu & Yang
(2003), and Zhang et al. (2008) tend to use the Rayleigh damping scheme, which is a
linear combination of the mass matrix and stiffness matrix multiplied by coefficients;
whereby these coefficients are a function of the damping ratio and the natural
frequencies of the bridge.
2.3.2.3 Bridge Span Length
As can be seen from the previous two subsections, the bridge span length L governs
the natural frequency and damping coefficient of the bridge structure; hence,
increasing or decreasing the span length can dramatically affect the dynamics. One
should also be aware that short spanning bridges behave differently from longer
spanning bridges when vehicles traverse them. For example, short bridges subjected
to long trains may only experience the action of a single bogie on the structure at any
one time; hence, as a bogie leaves the bridge, the bridge will begin to vibrate freely.
Subsequently, the following bogie arriving on the bridge will experience the
vibrations. Delgado & Dos Santos (1997) concluded that as the length of span
decreases the dynamic response of the bridge structure increases with increasing
speed, especially at high speeds. Yang et al. (1997) made a similar observation.

Chapter 2 – Literature Review
27
2.3.2.4 Rail approaches
Rail approaches located on either side of a bridge allow long vehicles to enter and
leave the bridge structure. The rail approaches are generally modelled as rigid rails,
whereas the bridge structure is flexible. Chu et al. (1985), Bogacz & Kowalska (2001)
and Bowe & Mullarkey (2005) have adopted rigid rail approaches in their bridge
models.
2.3.2.5 Dynamic amplification factor
The dynamic amplification factor can be defined as the ratio of the maximum
dynamic response to the static response of a bridge. This response is often measured
by the deflection of the bridge, but can also be measured by the internal forces of the
structure. Throughout the literature, the dynamic amplification factor has many name
variations.
Fryba (1999) describes it as the dynamic coefficient, while Au et al. (2002) refers to it
as an impact factor, Museros et al. (2002) calls it an impact coefficient, whereas
Cheng et al (2001) describes it as a dynamic magnification factor. Nonetheless, in all
cases it remains the ratio between the dynamic and static response. In this study, one
will refer to this term as the dynamic amplification factor or DAF.
A comprehensive study of the dynamic amplification factor for a train traversing a
railway bridge at different speeds is presented in Delgado and Dos Santo (1997). The
dynamic amplification factor is influenced by the damping on the structure; the train
stiffness; the ballast on the bridge; rail irregularities and the bridge length. Their study
found that the bridge stiffness and varying the bridge length were most influential.
Flexible bridge structures give high amplifications, while rigid bridge structures give

Chapter 2 – Literature Review
28
lower amplifications. In addition, track roughness can increase the dynamic
amplification factor of the bridge, especially if the irregularity coincided with the
natural period of the bridge or train.
In Figure 2.2, the author presents the dynamic amplification factor observed by many
researchers (Cai et al., 1994; Cheung et al., 1999; Fryba, 1999; Savin, 2001; Wu &
Yang, 2003; Majka & Hartnett, 2008) for the deflection of a bridge plotted as a
function of vehicle speeds with bridge damping giving the reader a family of curves.
From the diagram, one can see that the critical speed parameter of the vehicle occurs
at α = 0.6, while the critical damping parameter occurs at β = 1. As found by most
researchers, the DAF tends to increase with increasing speed, but can also decrease at
very high-speeds or with damping included.
Figure 2.2: DAF of bridge deflection subjected to different speeds (Fryba, 1999)
2.3.3 Numerical Bridge Solutions
When it comes to analysing the dynamic behaviour of bridge structures, researchers
have commonly used the following two techniques; the finite element method and the
method of modal superposition. The similarities and differences between the modal
and finite element model, as far as the form of the final matrices are discussed in
Dyn
am
ic a
mp
lifi
cati
on f
act
or

Chapter 2 – Literature Review
29
Bowe & Mullarkey (2008). In addition, the weighting and shape functions of the
finite element method play a similar role as the mode shapes play in the modal
solution. The difference between the two methods occurs in the representation of the
stiffness matrix.
2.3.3.1 Finite Element Method
The finite element method is a technique for analysing complicated structures by
theoretically cutting up the continuum of the structure into a number of small
elements that are connected at discrete joints called nodes (Hambly, 1991). For each
element, the approximate stiffness equation is derived by relating its nodal
displacements with the nodal force on that element. Computers are then used to solve,
often large numbers of, simultaneous equations that relate the nodal forces and
displacements for the entire structure. The finite element method is an approximation
of a real structure and the construction of the finite element models can often affect
the accuracy of the results. Generally, the larger the number of elements used to
discretize the beam or structure, the more accurate the solution (Fenner, 1996).
The finite element method can also be described as a numerical means for finding the
approximate solutions of partial differential equations. As illustrated in Appendix A
as well as in Bathe (1996) and Hutton (2004), the vibration of an elastic beam
subjected to a transverse load can be written in the form of a partial differential
equation. The beam equation contains a fourth order bending stiffness term plus a
second order mass term for the beam. In order to solve this partial differential
equation, both terms are integrated twice; thus, been replaced by weighting function
and shape functions using a technique known as the Galerkin Method, which is

Chapter 2 – Literature Review
30
presented in Appendix B. This technique is also described in most finite element
books by authors such as Bathe (1996), Zienkiewicz (2000), Hutton (2004) and Fish
& Belytschko (2007). ANSYS is the finite element program used by the author
throughout this thesis, and is used to solve both the finite element models as well as
modal superposition models.
2.3.3.2 Method of Modal Superposition
The method of modal superposition is a technique that can be used for analysing
simple structures such as simply supported beams, cantilever beams and continuous
beams subjected to a moving load or vehicle. Modal superposition treats each mode of
vibration of the entire beam as a single degree of freedom oscillator and then
combines the responses of these individual modes into a complete dynamic solution.
When using the method of modal superposition, it is important that a sufficient
number of modes be used to properly capture the dynamic deflection of the beam or
structure. In order to capture the internal forces of the beam, one requires several
more modes of vibration than the deflection of a beam. From the literature, the
method of modal superposition is still popular and authors such as Chatterjee et al.
(1994), Cheng et al. (1999), Greco & Santini (2002) and Deng & Cai (2009) often use
it to solve simple beam problems. In Yang & Lin (2005), the method of modal
superposition is used to derive the solution of a vehicle-bridge system that can
simulate a sprung mass traversing a simply support bridge. In their study, they found
that the first mode of vibration, of the simply supported bridge, gave sufficiently
accurate results for the mid-span deflection of the bridge. However, if they had
considered examining internal forces, many more modes of vibrations would have
been needed.

Chapter 2 – Literature Review
31
2.4 Modelling Irregularities
The greatest amount of damage and impact loads incurred by the track structure or
railway vehicle can be related to track and wheel irregularities. Certain irregularities
can even lead to wheels losing contact with the rail and as the wheels regain contact
with the rail, it can cause large dynamic loads to be applied to a structure, while other
effects can cause a railway vehicle to pitch and roll, which can lead to an undesirable
riding comfort felt by passengers.
In this section, one focuses both on the wheel and track irregularities and examines
their dynamic impact on the bridge and vehicle from the literature.
2.4.1 Wheel Irregularities
According to Esveld (2001), the largest dynamic load experienced by the track
structure from the vehicle results from irregularities on the wheel, such as wheel flats.
The wheel flats are the consequence of wheels sliding as a vehicle applies it brakes. In
the literature, researchers such as Fryba (1996) represent the wheel flat as a periodic
indentation on the rail surface; whereby, the irregularity function is computed using
the depth and length of the wheel flat, the wheel circumference and the distance of the
first impact from the point of origin. Zhai et al. (2001), Sun & Dhanasekar (2002) and
Wu & Thompson (2004) adopt a similar procedure.
2.4.2 Rail Irregularities
As a wheel rolls along the track, it can experience both vertical and lateral
imperfections, which can cause the wheels to vibrate and a vehicle to pitch or roll.
These imperfections can be the result of wear, rail joints, bumps, subsidence and
insufficient maintenance.

Chapter 2 – Literature Review
32
Perhaps the most commonly used procedure for simulating random rail irregularities
amongst researchers, institutes and organizations is the power spectral density PSD
function. This procedure produces random rail irregularities based on the condition of
the track structure, which is described in great detail in Garg & Dukkipati (1984),
Fryba (1996) and ISO-8606 (1995). Using the PSD function, rail irregularities can be
generated by means of the inverse Fourier transform as shown by Song et al. (2003).
Alternatively, one can simulate rail irregularities, such as rail corrugations and track
misalignment by means of periodic deterministic sinusoidal functions. In Xia et al.
(2000), the lateral irregularity of the track is described by means of a sine function
with an additional random phase angle. The summation of several sine functions is
used to describe the profile of the rail surface in Chang & Lin (1996), while Yau et al.
(1999) adds an extra exponential term that allows the rail irregularities to be applied
gradually to the rail surface.
It is an observation amongst many researchers, such as Yau et al. (1999) and Zhang et
al. (2001) that there is often little difference in the dynamic response of the bridge
regardless of the presence of irregularities; whereas the dynamic response of the
vehicle can be quiet substantial. Wu & Yang (2003) remark that the presence of track
irregularities can have a significant affected on the riding comfort of the train.
2.5 Wheel-rail contacts
This section examines the relationship that exists between the wheel and the rail i.e.
the contact. In finite element programs, such as ANSYS, contact elements are used to
simulate the wheel-rail interaction. Alternatively, many researchers have developed
their own contact systems using the fundamental principles of mechanics.

Chapter 2 – Literature Review
33
2.5.1 ANSYS contact elements
Within ANSYS, there are several different types of contact elements available, such
as node-to-node, surface-to-surface and node-to-surface contact elements; however,
the latter type is used extensively throughout this thesis to validate different
developed systems.
The node-to-surface contact element defines two regions that may come into contact
with each other: a rigid contact node (wheel) and a flexible target surface (bridge or
rail). The target surface is defined as a straight line between two sets of nodes.
During the solution phase, the contact node penetrates the target surface, proportional
to the contact stiffness; hence, the contact force that exists between the two surfaces is
equal to the penetration times the contact stiffness (ANSYS Theory Reference, 2002).
Contact can only occur when the contact node penetrates the target surface. In order to
determine if a contact node is near the target surface, a pinball region is located
around each target surface. The pinball region is defined by a circle, defaulted at 1.5
times the target surface length. Pseudo elements are then used if a contact node is
located between several target surfaces. These elements determine which target
surface is in contact with the contact node.
From an examination of the node-to-surface contact elements in ANSYS
(CONTAC48 and CONTAC49), it was discovered that these elements had some
limitations, such as:
Contact elements are unable to simulate a wheel or rail with irregularities.
Three-dimensional contact elements required a surface area instead of a line.

Chapter 2 – Literature Review
34
One is unable to model a contact node (wheel) on an infinite long rigid rail.
Friction models are available but are unsuitable for modelling the accelerating
and decelerating effects of the contact nodes (wheels).
2.5.2 Hertz contact theory
According to Esveld (2001), Hertz contact theory is based on the principal that the
elastic deformation of a steel wheel and a rail create an elliptical contact area. From
the normal force acting on the contact area, one can determine the dimensions of the
contact ellipse, whereby the ratio of the ellipse semi-axes are dependent on the wheel
curvature and rail profile. Typical values of wheel curvature, rail profile and the semi-
axes subjected to a wheel load are presented in Esveld (2001).
As described in Section 2.2.2.3, the Hertzian contact stiffness kH becomes an
important constant in railway dynamics when one assumes that bridge deflection
directly in contact with the wheel is not equal to the deflection of the wheel. Esveld
(2001) computes the Hertzian contact stiffness as a combination of the wheel load,
rail stiffness, radius of wheel curvature, railhead radius and the Poisson ratio.
Alternatively, the Hertzian contact stiffness can be described by a constant depending
on the radii and material properties multiplied by the wheel load. Using Esveld (2001)
one computes that a 1 m wheel diameter and a wheel load of 75kN has a Hertzian
contact stiffness kH = 1.4 GN/m.
2.5.3 Vehicle-bridge interaction element
Throughout the literature, there are many authors such as Yau et al. (1999), Yang &
Wu (2001), Ju & Lin (2003), Song et al. (2003), Wu & Thompson (2004) and Liu et
al. (2008) that have developed their own vehicle-bridge interaction elements or

Chapter 2 – Literature Review
35
contact systems in the study of railway dynamics. The greatest difference between
each system generally lies in the development of wheel-rail relationship. Some
authors adopt the notion that the wheel of the vehicle never parts with the bridge, thus
including both the local and convective acceleration of the wheel, while other authors
simulate the wheel-rail relationship using a Hertzian contact spring. With the latter
system, the wheel can lose contact with the rail when the contact force becomes
tensile.
The vehicle-bridge interaction element is a means of tracking the wheel-rail
relationship. At each new time step, the vehicle advances a known distance along the
bridge, which is dependant on the speed of the vehicle. As the vehicle advances, the
bridge deflects due to the vehicle load. The bridge and vehicle/wheel displacements
are then used to compute a new contact force. This contact force then imparts a force
to both the vehicle and bridge before proceeding to the next time-step. The force
applied to the vehicle can generate an excitation of the suspension system and causes
the sprung masses of the vehicle to undergo the vertical, longitudinal and lateral
motions depending on their mass, stiffness and damping properties (Majka, 2006).
2.6 Summary
In this chapter the author has introduced and described different aspects to railway
dynamics related to this research project. One initially begins by examining the
vehicle types and their characteristics, which leads onto a brief discussion of the
bridge models that one is most considered about studying and their characteristics.
Next the author describes the effects of irregularities and finally the wheel-rail contact
interaction is examined. Many ideas and concepts discussed in this literature review
related to the author’s study are expanded in greater detail in the following chapters.

Chapter 2 – Literature Review
36

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
37
Chapter 3
Wheel forces represented as time varying nodal
forces and moments
3.1 Introduction
In this chapter, the author models the wheels of a vehicle as a series of moving forces
traversing a railway bridge; where each wheel is represented as a moving constant
force. As described in the literature, the earliest vehicular models comprise a train
modelled as moving constant forces i.e. only the weights of the vehicle were taken
into account. Fryba (1996: p. 48) concludes that the inertia effects of the vehicles can
be ignored if the mass of the bridge is substantially greater than the mass of the
vehicle, e.g. large spanning bridges.
Modelling the train as a series of moving forces offers many advantages over the
moving sprung and unsprung mass systems, especially if one is only concerned with
the dynamic behaviour of the bridge structure. Since the train is modelled as a set of
forces, there is no external bridge-vehicle interaction required; thus the execution time
of the solution is often quicker. In addition, the results obtained from the moving
force system are often comparable with the results from the moving sprung and

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
38
unsprung mass systems, even at high speeds (Yang et al., 1997: p. 941; Yang & Wu,
2001: p. 460); thus, modelling a train as a series of moving forces is a recommendable
system of analysing a bridge in the initial stages of any project.
During the early stages of this project, it was discovered that the ANSYS finite
element program would prove to be problematic in the simulation of a moving point
force crossing a beam, as the user was unable to apply a point force between
consecutive nodes; thus, an alternative system was conceived. This alternative system
involves applying nodal forces (approximate simple model) or nodal forces and nodal
moments (exact numerical model) as function of time to the two nodes belonging to
the element on which the moving point force was located.
In order to validate these developed systems within the ANSYS finite element
program, the author introduces the ANSYS node-to-surface contact element
(CONTAC48), where the contact node represents the wheel and the target surface
represents the beam. These contact elements track the horizontal and vertical position
of the contact node in relation with the target surface. To represent the wheel as a
moving force, a point mass element (MASS21) i.e. the wheel, is given a zero mass
and a point force is attached to the node of the point mass element. This node is also
the contact node. In addition, the author must also prescribe a horizontal displacement
to the contact node to simulate the moving force traversing the beam.
Next, the single moving force for the simple model is expanded to simulate several
moving forces traversing a bridge. Originally, to ensure that a node was affected by
only one point force at a time, the distance between wheels of a vehicle had to be

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
39
greater than twice the length of a finite element; however, the drawback to this
technique is that a large number of nodes are required to discretize the beam.
Therefore an alternative system whereby a node could be affected by several point
forces at any instant was later developed. The overlapping system involves the
summation of several forces as a function of time on a particular node; hence, the
nodal force as a time function is no longer simple but quite complex.
Following the validation of each model, the author examines both a single as well as
several moving forces traversing the Boyne Viaduct railway bridge at a wide range of
speeds. Additionally, the results are made dimensionless by dividing the dynamic
solution by its static loaded solution; this ratio is called the dynamic coefficient. As an
alternative to the single track structure, the author also presents a fictional twin-track
structure based on the aesthetic shape of the Boyne Viaduct to investigate the dynamic
effects of a pair of trains traversing the structure at a range of different speeds. As a
final section, the Boyne Viaduct is subjected to rail traffic prescribed by the
Eurocodes (EN 1991-2, 2003).

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
40
3.2 Single Moving Force as a Function of Time
3.2.1 Development of single moving force
Equation (A.22), as derived in Appendix A.4, is the differential equation of motion of
an elastic beam subjected to a moving force with EI constant (subscripts dropped) as:
( )4 2
4 2
( , ) ( , ),
v x t v x tEI m p x t
x t
∂ ∂+ =
∂ ∂ (3.1a)
whereby
( ) ( ),p x t x ct Pδ= − where 0L
tc
≤ ≤ (3.1b)
where x is the distance coordinate with the origin at the left-hand end of the beam; t is
the time coordinate with the origin at the instant the force arrives on the beam; v(x, t)
is the deflection of the beam at point x and time t; E is the Young’s modulus of the
beam; I is the constant moment of inertia of the beam cross section; m is the constant
mass per unit length of the beam; P is the concentrated force of constant magnitude, c
is the constant speed of the load motion and L is the total length of the beam as shown
in Figure 3.1. The load is travelling from left to right.
L
P
ct
Figure: 3.1: Simply supported beam subjected to a single moving force
x
y, v
0

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
41
It should be noted that the first term on the left hand side of Equation (3.1a) describes
the beam stiffness while the second term is the beam inertia, whereas the term on the
right hand side of Equation (3.1a) describes the moving load.
The symbol δ(x- x0) is the Dirac (impulse, or delta) function and can be defined as the
distributional derivative of the Heaviside function ( )0x x−H as presented in Figure
3.2 (a) and (b), respectively. The Dirac delta function is defined as:
( ) ( ) ( )0 0
0
L
f x x x dx f xδ − =∫ so long as 00 x L< < (3.2)
Figure 3.2: Plot of the mathematical functions: (a) Dirac delta function; (b)
Heaviside Function
Recalling Equation (B.10) in Appendix B, the author multiples Equation (3.1a) by a
weighting function vδ and integrates along the local length of a finite element, where
the local coordinate is defined by the symbol χ , giving:
( )4 2
4 2
0
, 0
lv v
EI m p x t vdt
δ χχ
∂ ∂+ − =
∂ ∂ ∫ (3.3)
(a) (b)
Note:
0ε →
0x
( )xδ
ε
0x0
2x
ε+
x x
00
11ε
02
xε
−
( )xH

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
42
Integrating Equation (3.3) by parts twice, as shown in Equation (B.13) gives:
2 2 2
2 2 2
0
lv v v
EI m v dt
δδ χ
χ χ
∂ ∂ ∂+
∂ ∂ ∂ ∫
( ) 1 1 2 20
0 0
ˆ ˆˆ ˆ,
l
l
l
v vp x t vd v Q M v Q M
δ δδ χ δ δ
χ χ
∂ ∂= + + + +
∂ ∂∫ (3.4)
where 1
Q and 2
Q are the nodal shear forces while 1
M and 2
M are the nodal bending
moments at local nodes 1 and 2 of a beam element, respectively.
Next, the weighting function vδ is made equal to a beam shape function. The result is
Equation (B.15) in Appendix B. This equation is rewritten below with the right-hand
side fully evaluated as shown by Equation (B.18) as:
( )( )( )( )
( )( )( )( )
1 1
2 21 1
2 2
2 20 0
2 2
l l
N N
G Gv vEI d m d
N N t
G G
χ χ
χ χχ χ
χ χχ
χ χ
′′ ′′ ∂ ∂
+ ′′ ∂ ∂
′′
∫ ∫
( )( )( )( )
( )
11
1 1
20 2
22
ˆ
ˆ,
ˆ
ˆ
l
QN
G Mp x t d
N Q
G M
χ
χχ
χ
χ
= +
∫ (3.5)
where ( )1N χ , ( )1G χ , ( )2N χ and ( )2G χ are the weighting functions, which are
equal to the shape functions that are defined by Equation (B.8) and plotted in Figure
B.3 in Appendix B. Equation (3.5) will be known as the exact numerical model.
However, one begins by simplifying the first term on the right hand side of Equation
(3.5). This is done by replacing ( )1N χ and ( )2N χ by ( )1H χ and ( )2H χ ,
respectively, where ( )1H χ and ( )2H χ are linear weighting functions. Furthermore,
( )1G χ and ( )2G χ are replaced by zeros. With these changes Equation (3.5) becomes:

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
43
( )( )( )( )
( )( )( )( )
( )
( )( )
11 1 1
2 21 1 1
2 2
2 2 20 0 0 2
2 22
ˆ
ˆ0,
ˆ
0 ˆ
l l l
QN N H
G G Mv vEI d m d p x t d
N N t H Q
G G M
χ χ χ
χ χχ χ χ
χ χχ χ
χ χ
′′ ′′ ∂ ∂
+ = + ′′ ∂ ∂
′′
∫ ∫ ∫ (3.6)
where ( )1H χ and ( )2H χ are defined in Equation (B.47) and can be seen in Figure
B.7 in Appendix B. The solution to Equation (3.6) will be known as the simple model.
In Figure 3.3, the coordinate of node i is xi, which is the distance of node i from the
left hand support. Time t is arranged in such a manner that the point force is over the
left hand support at t = 0.
+1-1 iii
ct
x x x x
3
x
2
x
1
x =
P
L
2 3 i i+i- 11 L1 0
Figure: 3.3: Simply supported beam subjected to a single moving force
The purpose of Sections 3.2.1.1 and 3.2.1.2 is to express the effect of the applied force
P at node i, by means of the simple and exact model, respectively. To affect node i,
the force P must be applied to one of two finite elements, one element to the left of
node i, for which node i is its local node 2 and the other element to the right of node i,
for which node i is its local node 1.
x
y, v

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
44
3.2.1.1 Moving force using an approximate simple model
One begins by examining the finite element to the left of node i. Figure 3.4 presents
an isolated beam element from node i-1 to node i with the point force P between those
two nodes. The distance between nodes xi-1 and xi is l, while the distance from xi-1 to a
typical point of a beam element is defined as χ . The internal shear force and bending
moment at the ends of the beam are defined as Q and M , respectively.
Figure 3.4 An isolated finite element from node i-1 to node i (simple)
The global x position of a typical point on the isolated beam element in Figure 3.4 can
be related to the local χ position as follows:
1ix xχ −= + (3.7)
Substituting Equation (3.7) into (3.1b) gives the local x position of the moving force P
on this isolated beam element as:
( ) ( ) ( ) ( )( )1 1, i ip x t x ct P x ct P ct x Pδ δ χ δ χ− −= − = + − = − − (3.8)
which is only valid for 1i ix x
tc c
− ≤ ≤
( )1 1iPH ct x −− ( )2 1iPH ct x −−
1Q2Q
1M 2M
χ

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
45
Substituting Equation (3.8) into the first term on the right hand side of Equation (3.6)
relates the pressure term ( ),p x t to the moving force P as follows:
( )
( )( )
( )
( )( )( )
1 1
1
2 20 0
0 0,
0 0
l l
i
H H
p x t d ct x PdH H
χ χ
χ δ χ χχ χ
−
= − −
∫ ∫
( )
( )
1 1
2 1
0
0
i
i
H ct x
PH ct x
−
−
−
= −
(3.9)
where the right hand side of Equation (3.9) is evaluated using Equation (3.2).
Recalling Equation (B.47) in Appendix B, the linear shape functions (positive
between 0 lχ< < ) are defined as:
( )1 1H lχ χ= −
( )2H lχ χ= (3.10)
Substituting Equation (3.10) into (3.9) gives
( )
( )
1
1 1
12 1
1
00
0
0
i
i
ii
ct x
H ct x l
P Pct xH ct x
l
−
−
−−
− − −
= −−
for 1i ix x
tc c
− ≤ ≤ (3.11)
Equation (3.11) states that when the point force P is between the nodes i-1 and i, it
can be replaced by two nodal forces acting in the same direction as the force P, one
applied at node i-1 and the other at node i, where both are a function of time.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
46
Now, one examines the element to the right of node i. An isolated beam element from
node i to node i+1 is selected, when the point force P is between these two nodes as
shown in Figure 3.5. On this occasion, the global x position of a typical point on the
isolated beam element in Figure 3.5 can be related to the local χ position as follows:
ix xχ= + (3.12)
Figure 3.5: An isolated finite element from node i to node i+1 (simple)
Substituting Equation (3.12) into (3.1b) gives the local x position of the moving force
P on this isolate beam element as:
( ) ( ) ( ) ( )( ), i ip x t x ct P x ct P ct x Pδ δ χ δ χ= − = + − = − − (3.13)
which is valid for 1i ix x
tc c
+≤ ≤ . Substituting Equation (3.13) into the first term on the
right hand side of Equation (3.6) and evaluating using Equation (3.2) gives:
( )
( )( )
( )
( )( )( )
1 1
2 20 0
0 0,
0 0
l l
i
H H
p x t d ct x PdH H
χ χ
χ δ χ χχ χ
= − −
∫ ∫
( )
( )
1
2
0
0
i
i
H ct x
PH ct x
−
= −
(3.14)
( )1 iPH ct x− ( )2 iPH ct x−
1Q 2Q1M 2M
χ

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
47
Substituting Equation (3.10) into (3.14) gives
( )
( )
1
2
1
00
0
0
i
i
ii
ct x
H ct x l
P Pct xH ct x
l
− − −
= −−
for 1i ix x
tc c
+≤ ≤ (3.15)
where Equation (3.15) tells the reader that when the point force P is between the
nodes i and i+1, it can again be replaced by two nodal forces acting in the same
direction as the force P, one applied at node i and the other at node i+1, where both
are a function of time.
The function between 1ix
c
− and ix
c in Figure 3.6 is the third entry of the vector on the
right hand side of Equation (3.11), while the function between ix
c and 1i
x
c
+ in Figure
3.6 is the first entry of the vector on the right hand side of Equation (3.15)
Figure 3.6: Influence of point force P on node i as a function of time
t
P
1ix
c
+ix
c
1ix
c
−0
1 ict xP
l
− −
1ict xP
l
−−

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
48
3.2.1.2 Moving force using an exact numerical model
Using a similar methodology to that of Section 3.2.1.1, the author begins by
examining the element to the left of node i. An isolated beam element from node i-1
to node i is selected when the point force P is between these nodes as shown in
Figure 3.7.
Figure 3.7 An isolated beam element from node i-1 to node i (exact)
Substituting Equation (3.8) into the first term on the right hand side of Equation (3.5)
relates the pressure term ( ),p x t to the moving force P as follows:
( )( )( )( )
( )
( )( )( )( )
( )( )
1 1
1 1
1
2 20 0
2 2
,
l l
i
N N
G Gp x t d ct x Pd
N N
G G
χ χ
χ χχ δ χ χ
χ χ
χ χ
−
= − −
∫ ∫
( )( )( )( )
1 1
1 1
2 1
2 1
i
i
i
i
N ct x
G ct xP
N ct x
G ct x
−
−
−
−
−
− =
− −
(3.16)
where the right hand side of Equation (3.16) is evaluated using Equation (3.2).
Recalling Equation (B.8) in Appendix B, the shape functions (between 0 lχ< < ) are
defined as:
( )2 1iPG ct x −−( )1 1iPG ct x −−
( )2 1iPN ct x −−( )1 1iPN ct x −−
1Q 2Q1M2M
χ

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
49
( )2 3
1 2 3
3 21N
l l
χ χχ = − +
( )2 3
1 2
2G
l l
χ χχ χ= − +
( )2 3
2 2 3
3 2N
l l
χ χχ = −
( )2 3
2 2G
l l
χ χχ = − + (3.17)
Substituting Equation (3.17) into (3.16) gives
( )( )( )( )
( ) ( )
( )( ) ( )
( ) ( )
( ) ( )
2 3
1 1
2 3
2 31 1 1 1
1 21 1
2 32 1
1 1
2 32 1
2 3
1 1
2
3 2 1
2
3 2
i i
i i i
ii
ii i
i
i i
ct x ct x
l l
N ct x ct x ct xct x
G ct x l lP P
N ct x ct x ct x
G ct x l l
ct x ct x
l l
− −
− − −
−−
−− −
−
− −
− −− +
− − −− − +
− =
− − − − −
− −− +
for 1i ix x
tc c
− ≤ ≤ (3.18)
where Equation (3.18) states that when the point force P is between the nodes i-1 and
i, it can be replaced by two nodal forces as well as two nodal moments, one force and
one moment applied at node i-1 and the other force and moment at node i, where all
are functions of time. It should be noted that the nodal forces applied act in the same
direction as the positive y-axis when positive, while the nodal moments applied act
counter-clockwise about the z-axis when positive, as shown in Figure 3.7.
Next an element to the right of node i is examined. In Figure 3.8 an isolated beam
element from node i to node i+1 is selected when the point force P is between these
particular nodes.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
50
Figure 3.8: An isolated section of the beam from node i to node i+1 (exact)
Substituting Equation (3.13) into the first term on the right hand side of Equation (3.5)
relates the pressure term ( ),p x t to the moving force P as follows:
( )( )( )( )
( )
( )( )( )( )
( )( )
1 1
1 1
2 20 0
2 2
,
l l
i
N N
G Gp x t d ct x Pd
N N
G G
χ χ
χ χχ δ χ χ
χ χ
χ χ
= − −
∫ ∫
( )( )( )( )
1
1
2
2
i
i
i
i
N ct x
G ct xP
N ct x
G ct x
−
− =
− −
(3.19)
While substituting Equation (3.17) into (3.19) gives:
( )( )( )( )
( ) ( )
( )( ) ( )
( ) ( )
( ) ( )
2 3
2 3
2 31
21
2 32
2 32
2 3
2
3 2 1
2
3 2
i i
i i i
ii
ii i
i
i i
ct x ct x
l l
N ct x ct x ct xct x
G ct x l lP P
N ct x ct x ct x
G ct x l l
ct x ct x
l l
− − − + − − − − − +
− =
− − − − −
− −− +
for 1i ix x
tc c
+≤ ≤ (3.20)
As before, Equation (3.20) states that when the point force P is between nodes i and
i+1, it can again be replaced by two nodal forces as well as two nodal moments, one
force and moment applied at node i and the other force and moment at node i+1,
where all are functions of time.
( )2 iPG ct x−( )1 iPG ct x−
( )2 iPN ct x−( )1 iPN ct x−
1Q 2Q1M 2M
χ

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
51
The functions between 1ix
c
− and ix
c in Figure 3.9 (a) and (b) are the third and fourth
entries of the vector on the right hand side of Equation (3.18), respectively, while the
functions between ix
c and 1i
x
c
+ in Figure 3.9 (a) and (b) are the first and second entries
of the vector on the right hand side of Equation (3.20), respectively.
Figure 3.9: Influence of point force P on node i (a) nodal force (b) nodal moment
(a)
(b)
1ix
c
+
1ix
c
+
ix
c
ix
c
1ix
c
−
1ix
c
−
t
t0
0
P
( ) ( )2 3
1 1
2 3
3 2i i
ct x ct xP
l l
− − − −
−
( ) ( )2 3
2 3
3 2 1
i ict x ct x
Pl l
− −− +
( )( ) ( )
2 3
2
2i i
i
ct x ct xP ct x
l l
− −− − +
( ) ( )2 3
1 1
2
i ict x ct x
Pl l
− − − −
− +

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
52
3.2.1.3 Moving single force using ANSYS node-surface contact elements
In Bowe & Mullarkey (2000: p. 46), a wheel of a vehicle is represented by a single
point mass element Mw located at its own unique node im as can be seen in Figure
3.10. Node-to-surface contact elements (CONTAC48) are then used to simulate the
wheel-rail interaction: whereby, node im is referred to as the contact node and the
nodes between x1 to xL of the beam are referred to as the target surface. The contact
element 2 and i are also shown in Figure 3.10.
+1
i+1x
i-1
contact
Lx
i
i
1 ix
contact node
i
L
x
2 3
32x x
i m
target surface
1
1x = 0
Mwelement 2
i-
contact element
Figure 3.10: Single point mass element with NL-1 contact elements
In order to represent the wheel as a moving load, the point mass element Mw is given
zero mass and a point force P is attached to im, the node of the point mass, as
illustrated in Figure 3.11. Within ANSYS, any node can be given a prescribed
displacement that varies with time. Therefore, the point mass is moved across the
beam from left to right by prescribing the longitudinal displacement, U = ct, to node
im, where c is the speed of the point mass element. This system is primarily used to
validate the simple and exact numerical model.
U = ct
Mw
P
Figure 3.11: Massless wheel with a point force P attached
x
x
y, v

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
53
3.2.2 Validation of moving force as a function time
In order to validate simple and exact numerical system, the author compares results
from these techniques with the results of the ANSYS contact element method as well
as with results from the literature.
3.2.2.1 Cantilever beam subjected to a moving load
In this first example, one simulates a moving load traversing a cantilever beam from
the fixed to the free-end, and vice-versa, where the beam has a length L of 7.62 m,
flexural rigidity EI of 9.47 x 106 Nm
2 and mass per unit length m of 46 kg/m;
therefore, using Equation (C.27a), the first natural frequency of this particular beam is
1 27.49 rad/sec.ω = The moving load P of -25.79 kN traverses the beam at a constant
speed c of 50.8 m/s. These properties are the same as those used by Akin & Mofid
(1989). The gravitational and damping effects of the beam are ignored. In all cases,
time t is arranged in such a manner that the load is at the left support at t = 0 sec and
the initial displacement and velocity of the beam are equal to zero. The Newmark-β
time integration scheme (Bathe, 1996) with 100 equal time steps is used to solve the
transient analysis. The beam is discretized into ten beam elements.
The vertical displacement at the free-end of the fixed-free and free-fixed cantilever
beam subjected to a moving load, traversing from left to right, can be seen in Figure
3.12a and 3.12b, respectively. It can be observed from the results that both the
solutions of both the simple system and the exact system are comparable with the
numerical results obtained from Akin & Mofid (1989).

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
54
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Simple Model
Exact Model
Akin & Mofid (1989) ML
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Simple Model
Exact Model
Akin & Mofid (1989) ML
Figure 3.12: Time history at free-end of a cantilever beam: (a) left hand side is
fixed; (b) right hand side is fixed.
3.2.2.2 Simply supported beam subjected to a moving load
In this second example, the beam and vehicle properties adopted are similar to those
of Yang and Wu (2001), such that the bridge has a length L of 25m, Young’s modulus
of elasticity E of 2.87x106 kN/m
2, moment of inertia I of 2.9 m
4, mass per unit length
m of 2.303 t/m and a Poisson’s ratio ν of 0.2. The gravitational and damping effects of
the bridge are ignored. The vehicle traverses the bridge at a constant speed c of 27.78
m/s (100 km/hr) and has a vehicle load P of -56.4 kN. Again one uses the Newmark-β
(a)
(b)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
55
time integration method (Bathe, 1996) with 500 equal time steps to solve each
transient analysis, with the vehicle at the left hand support at t = 0 sec. In addition, the
initial displacement and velocity of the beam are equal to zero at time t = 0 sec. As
before, the beam is discretized into ten elements.
In Figure 3.13(a) the vertical displacement of the beam at mid-span is presented. It
can be seen that there is a great likeness among the solutions of all three systems as
the graphs have identical magnitude and curvature. Examining the vertical
acceleration, ( )2 22 ,v L x∂ ∂ at mid-span of the beam, it is seen that the results in all
cases are also quite similar as shown in Figure 3.13(b). It is observed that the vertical
acceleration of the beam range between -0.3 to 0.4 m/s2 in all cases. In the final plot, the
bending moment at mid-span of the beam as a function of time is presented in Figure
3.13(c). The reader should be aware that in the case of the exact model, the bending
moment at mid-span of the beam varies between the two local nodes at mid-span. This
is due to the applied nodal moment. Hence, results from both local nodes are plotted in Figure
3.13c for the exact model. Similarly to the previous graphs, the simple model gives results which
compare well with results from both the exact model and the use of the ANSYS contact element.
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Simple Model
Exact Model
ANSYS CE
(a)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
56
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Simple Model Exact Model ANSYS CE
Figure 3.13: (a) Vertical displacement; (b) vertical acceleration; (c) bending
moment at mid-span of the beam as a function of time
3.2.2.3 Sensitivity analysis of the developed systems
As seen in the previous results, both the simple model and the exact model have
identical results provided that a suitable number of beam elements are used to
discretize the beam. However, by selecting a coarser beam mesh, i.e. only 4 beam
elements as presented in Figure 3.14, it will be shown that the results from the simple
model can be different from those of the exact model.
(b)
(c)
Point load
arrives at node 4 Point load
arrives at node 6
Point load
arrives at node 5

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
57
L = 25m
1 2 3 4 5Element 1 Element 2 Element 3 Element 4
LN2 LN1 LN2 LN1 LN2 LN1 LN2LN1
l = 6.25m
Figure 3.14: Simply supported beam from Section 3.2.2.2 divided into four elements
In Figure 3.15, the author plots the vertical displacement, acceleration and bending
moment at mid-span of the beam as a function of time for all three methods. For
comparison purposes, the author also presents results from the ANSYS contact model,
where the beam is discretized into 50 elements.
The first noticeable distinction observed in Figure 3.15, is that the results obtained
from the ANSYS node-to-surface contact element, with 4 elements, (CONTAC48) are
almost identical to the results from the simple model, while the second distinction is
that these particular results are somewhat lower than the results from the exact
numerical model and the ANSYS contact model with 50 elements. Additionally, from
inspection of Figure 3.15, one can conclude that the results from the exact model tend
to give better comparisons with the more accurate solutions in Figure 3.13.
It can be seen in Figure 3.15(a) that the maximum mid-span deflection of the simple
model is at least 10% smaller than that of the exact model, while the vertical
acceleration for simple model tends to diverge with increasing time in Figure 3.15(b).
In addition, the bending moment for the simple model in Figure 3.15(c) tends to be
slightly less than the bending moment for the simple model observed in Figure
3.13(c). The reader can see that despite the exact model of Figure 3.15(a) having an
identical deflection with the exact model in Figure 3.13(a), its bending moments in
Figure 3.15(c) are quite different from the exact model’s bending moment of Figure
3.13(c), using the coarser beam mesh.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
58
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
me
nt
(m)
Simple Model (4 elements)
Exact Model (4 elements)
ANSYS CE (4 elements)
ANSYS CE (50 elements)
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Simple Model (4 elements) Exact Model (4 elements)
ANSYS CE (4 elements) ANSYS CE (50 elements)
0
100
200
300
400
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
Simple Model
Exact Model (LN1)
Exact Model (LN2)
ANSYE CE (4 elements)
ANSYE CE (50 elements)
Figure 3.15: Time history at mid-span of the beam using only 4 beam elements: (a)
vertical displacement; (b) vertical acceleration; (c) bending moment
(a)
(b)
(c)
Point load
arrives at node 2 Point load
arrives at node 4
Point load
arrives at node 3

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
59
In Figure 3.16, the author presents two free-body diagrams at the mid-span joint (i=3)
of the beam. One is when the moving point force is on the second element, while the
other is when the moving point force is on the third element. By satisfying joint
equilibrium in Figures 3.16(a) and (b) and using Figure B.2, the internal bending
moments at mid-span of the beam are equal to ( )2 1ˆ ˆ 1,2 .iM M PG i− = = Thus, the
difference or gap between the two internal bending moments is equal to the applied
moment at that joint for the exact model as shown in Figure 3.17. Equally, the internal
shear forces at mid-span of the beam are equal to ( )2 1ˆ ˆ 1, 2 .iQ Q PN i− = =
(a) Internal forces in node 3 when the moving point force is on the 2nd
element
(b) Internal forces in node 3 when the moving point force is on the 3rd
element
Figure 3.16: Free-body diagram of the joint at mid-span of the beam
P
2PG
Node 3
2M1M
2Q1Q
2M1M
1Q 2Q
2PN1PN
1PG
2i = 3i =Elem 2 Elem 33i = 4i =
2M1M
2Q1Q
2M1M
1Q 2Q
2PN1PN
1PG
2i = 3i =Elem 2 Elem 33i = 4i =
P
2PG
Node 3
2Q 1Q
1M2M
3i =
2Q 1Q
1M2M
3i =

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
60
-100
0
100
200
300
400
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
Internal Moment (LN2)
Internal Moment (LN1)
Applied Moment
Figure 3.17: Time history of the internal and applied moments at mid-span of the
beam using the exact model with only 4 beam elements
3.2.2.4 Examining internal forces of the developed systems
Like all finite element programs, ANSYS has it limitations. As mentioned earlier in
this chapter, ANSYS does not allow the user to apply a point force between
consecutive nodes; however, using the author’s developed system this problem can be
overcome. Nonetheless, these developed systems have certain limitations within
ANSYS, which arise when one examines the internal forces. In the following
example, the author adopts the same beam properties as those of Section 3.2.2.3, such
that the beam has a total length L of 25 m; therefore, the distance between consecutive
nodes of a single element l is 6.25 m. In Figure 3.18, a point force P is applied
between two consecutive nodes at a distance 8.75 mx = from the left support or a
distance 0.4l from the second node.
Load P on Elem 1 Load P on Elem 2 Load P on Elem 3 Load P on Elem 4
2 PG
1 PG

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
61
x
y
l
P
1 3 4 52
0.4 0.6ll
x = 8.75m
L = 25m
Figure 3.18: Applying a point force between two consecutive nodes in ANSYS
Using ( )0.4 0.4 6.25 2.5 ml = = with Equation (B.8) and (B.47), the author is able to
compute the shape functions that are used by the simple and exact models as follows:
( )1 2.5 0.600H = ( )2 2.5 0.400H =
( )1 2.5 0.648N = ( )2 2.5 0.352N =
( )1 2.5 0.900G = ( )2 2.5 0.60G = − (3.21)
Using the computed values in Equation (3.21), the author is now able to replace the
original point force in Figure 3.18 with two nodal forces 0.6P and 0.4P applied at
nodes 2 and 3, respectively, for the simple model as shown in Figure 3.19(a). In a
similar manner, the original point force in Figure 3.18 can be replaced by two nodal
forces and two nodal moments for the exact model as shown in Figure 3.19(b). The
nodal forces applied to nodes 2 and 3 are 0.648P and 0.352P, respectively, while the
nodal moments are 0.9P and -0.6P as indicated on the diagram. As an additional
exercise, the author also considers replacing the original point force in Figure 3.18
with a pressure applied to the beam such that the centre position of the pressure is
Element 1 Element 3 Element 4
Element 2

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
62
located at a distance of 0.4l from the second node and the pressure has an overall
length of 0.1l, as can be seen in Figure 3.19(c).
0.6P 0.4P
-0.65P -0.35P
0.648P 0.352P
-0.65 P -0.35P
- 0.6 P0.9 P
-0.65P -0.35P
lp=P0.1
Figure 3.19: Point force represented in ANSYS: (a) simple model; (b) exact model;
(c) pressure load
Using Figure 3.19(a), the resultant reaction forces experienced by the beam are as
follows: the left-hand support or LHS ( ) ( )0.6 3 4 0.4 2 4 0.65P L P L L P= − + = − ; thus,
giving the RHS = –0.35P as illustrated in Figure 3.19. It should also be noted that if
one had chosen Figures 3.19(b) or 3.19(c), the resultant reaction forces would be same
as the computed values. In this example, the point force P is 56.4 kN; therefore, with
the aid of Figure 3.19 and Equation (3.21) the nodal forces and moments used in this
example can be computed as follows:
(a)
(b)
(c)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
63
( )LHS 0.650 56.4 36.66= − = − ( )RHS 0.350 56.4 19.74= − = −
( ) ( )1 2.5 0.600 56.4 33.84PH = = ( ) ( )2 2.5 0.400 56.4 22.56PH = =
( ) ( )1 2.5 0.648 56.4 36.55PN = = ( ) ( )2 2.5 0.352 56.4 19.85PN = =
( ) ( )1 2.5 0.900 56.5 50.76PG = = ( ) ( )2 2.5 0.60 56.4 33.84PG = − = − (3.22)
The reader should take the time to refer back to Equation (3.22) and Figure A.3 as
they examine the internal shear forces in Figure 3.20. In Figure 3.20a, the author
presents the analytical shear force Qy, when the point force is located between nodes 2
and 3, while Figures 3.20b to 3.20d plot the numerical shear forces that one gets from
a finite element program. Figure 3.20b, 3.20c and 3.20d show the internal shear forces
Qy from the simple model, exact model and pressure model, respectively. From
inspection of Figure 3.20, one can see that the numerical solutions are somewhat
similar to the analytical solution and would improve with a larger number of beam elements.
(a)
(b)
(c)
yQ
x
yQ
yQ
x
x

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
64
Figure 3.20: Internal shear force diagram: (a) analytical solution; (b) simple
model; (c) exact model; (d) pressure load
The reader should again refer back to Equation (3.22) and Figure A.3 in order to
check the internal bending moments Mz that are presented in Figure 3.21. In Figure
3.21a, the analytical bending moment, when the point force is located between nodes
2 and 3, is plotted. Figures 3.21b to 3.21d then show the numerical bending moment
that one gets from a finite element program. Figure 3.21b, 3.21c and 3.21d are the
bending moments from the simple model, exact model and pressure model, respectively.
(d)
(a)
(c)
(b)
yQ
x
zM
zM
zM
x
x
x

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
65
Figure 3.21: Internal bending moment diagram: (a) analytical solution; (b) simple
model; (c) exact model; (d) pressure load
Inspecting Figure 3.21, one firstly sees that the bending moment for the simple model
is exactly the same as the pressure model. Secondly, the bending moment between
nodes 2 and 3 for the analytical solution is not captured in any of the numerical
solutions. Thirdly, the exact model has stepped internal moments. These stepped
internal moments are due to the applied moments 1PG and 2PG at nodes 2 and 3. A
free-body diagram of nodes 2 and 3 for the exact model is shown symbolically in
Figure 3.22a and 3.23a, and numerically in Figure 3.22b and 3.23b, respectively. The
numerical values in Figure 3.22b and 3.23b are taken directly from Figures 3.20 and
3.21. However, before applying equilibrium to the joint, one must also refer to Figure
A.3, which shows the sign convention adopted in this thesis. On the negative face, the
shear force is positive downwards and the bending moment is positive in a clockwise
direction, whereas on the positive face, the shear force is positive upwards and the
bending moments are positive in an anti-clockwise direction. Applying equilibrium to
node 2 for the exact model, one gets:
( ) ( ) 1
at element 2 at element 3
0 0y y
Q l Q PN− − =
or 2 1 1ˆ ˆ 0y yQ Q PN− − = ⇒ ( ) ( ) ( )36.66 0.11 36.55 0− − = (3.23a)
( ) ( ) 1
at element 2 at element 3
0 0z z
M l M PG− − =
or 2 1 1ˆ ˆ 0
z zM M PG− − = ⇒ ( ) ( ) ( )229.13 279.89 50.76 0− − − − = (3.23b)
(d) zM
x

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
66
Figure 3.22: Free-body diagram of node 2 (a) symbolically; (b) numerically
Equally, applying equilibrium to node 3 for the exact model, one gets:
( ) ( ) 2
at element 2 at element 3
0 0y y
Q l Q PN− − =
or 2 1 2ˆ ˆ 0y yQ Q PN− − = ⇒ ( ) ( ) ( )0.11 19.74 19.85 0− − − = (3.24a)
( ) ( ) 2
at element 2 at element 3
0 0z z
M l M PG− − =
or 2 1 2ˆ ˆ 0
z zM M PG− − = ⇒ ( ) ( ) ( )280.59 246.75 33.84 0− − − − − = (3.24b)
Figure 3.23: Free-body diagram of node 3 (a) symbolically; (b) numerically
Despite the stepped internal moments for the exact model, Equations (3.23) and (3.24)
show that this solution is numerically correct as joint equilibrium is satisfied.
36.66 0.11
279.89−
229.13− 36.55
50.76
(a) (b)
0.11 19.74−
246.75−280.59−19.85
-33.84
2ˆ
yQ 1ˆ
yQ
1ˆ
zM
2ˆ
zM
1PN
1 PG
2i = 2i =
(a) (b) 2
ˆyQ
1ˆ
yQ
1ˆ
zM
2ˆ
zM
2PN
2 PG
3i = 3i =

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
67
Until now, one has computed the internal forces analytically using the beam element
shape functions; however, ANSYS uses the beam stiffness and nodal displacements as
well as the beam shape functions to calculate the internal forces. Recalling Equation
(A.16) and (A.19) in Appendix A, the bending moment and shear force are computed,
respectively, as follows:
2
2z z
vM EI
χ
∂=
∂ (3.25a)
3
3y z
vQ EI
χ
∂= −
∂ (3.25b)
where the second and third derivative of the shape function with respect to x can be
found in Equation (B.8). Table 3.1 presents the bending moment, while the shear
force can be seen in Table 3.2 for the simple model.
Table 3.1: Bending moment using Equation (3.25a) for simple model
Second derivative of shape functions Nodal Displacements
N1'' G1'' N2'' G2'' Elem 1 Elem 2 Elem 3 Elem 4
Local node 1 0.00E+00 1.35E-03 1.79E-03 1.19E-03
-0.1536 -0.6400 0.1536 -0.3200 2.45E-04 1.59E-04 -1.99E-05 -1.59E-04
Local node 2 1.35E-03 1.79E-03 1.19E-03 0.00E+00
0.1536 0.32 -0.1536 0.64 1.59E-04 -1.99E-05 -1.59E-04 -2.05E-04
Bending Moment in element at LN1 (kNm) 0.00 -229.13 -246.75 -123.37
Bending Moment in element at LN2 (kNm) -229.13 -246.75 -123.37 0.00
Table 3.2: Shear force using Equation (3.25b) for simple model
Third derivative of shape functions Nodal Displacements
N1''' G1''' N2''' G2''' Element 1 Element 2 Element 3 Element 4
Local node 1 0.00E+00 1.35E-03 1.79E-03 1.19E-03
0.0492 0.1536 -0.0492 0.1536 2.45E-04 1.59E-04 -1.99E-05 -1.59E-04
Local node 2 1.35E-03 1.79E-03 1.19E-03 0.00E+00
0.0492 0.1536 -0.0492 0.1536 1.59E-04 -1.99E-05 -1.59E-04 -2.05E-04
Shear force in element at LN1 (kN) 36.66 2.82 -19.78 -19.78
Shear force in element at LN2 (kN) 36.66 2.82 -19.78 -19.78

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
68
In a similar manner, Table 3.3 presents the bending moment, while the shear force is
shown in Table 3.4 for the exact model. Comparing the bending moments and shear
forces for the simple model in Tables 3.1 and 3.2 with Figures 3.20b and 3.21b, the
reader can clearly see that both sets of results are identical. Similarly, comparing the
bending moment and shear forces for the exact model in Table 3.3 and 3.4 with
Figures 3.20c and 3.21c, one can again see that both sets of results are alike.
Table 3.3: Bending moment using Equation (3.25a) for exact model
Second derivative of shape functions Nodal Displacements
N1'' G1'' N2'' G2'' Elem 1 Elem 2 Elem 3 Elem 4
Local node 1 0.00E+00 1.48E-03 1.94E-03 1.26E-03
-0.1536 -0.6400 0.1536 -0.3200 2.65E-04 1.79E-04 -3.15E-05 -1.70E-04
Local node 2 1.48E-03 1.94E-03 1.26E-03 0.00E+00
0.1536 0.32 -0.1536 0.64 1.79E-04 -3.15E-05 -1.70E-04 -2.17E-04
Bending Moment in element at LN1 (kNm) 0.00 -279.89 -246.75 -123.37
Bending Moment in element at LN2 (kNm) -229.13 -280.59 -123.37 0.00
Table 3.4: Shear force using Equation (3.25b) for exact model
Third derivative of shape functions Nodal Displacements
N1''' G1''' N2''' G2''' Element 1 Element 2 Element 3 Element 4
Local node 1 0.00E+00 1.48E-03 1.94E-03 1.26E-03
0.0492 0.1536 -0.0492 0.1536 2.65E-04 1.79E-04 -3.15E-05 -1.70E-04
Local node 2 1.48E-03 1.94E-03 1.26E-03 0.00E+00
0.0492 0.1536 -0.0492 0.1536 1.79E-04 -3.15E-05 -1.70E-04 -2.17E-04
Shear force in element at LN1 (kN) 36.65 0.10 -19.74 -19.74
Shear force in element at LN2 (kN) 36.65 0.10 -19.74 -19.74
Before ending this section, the author will now show that internal forces from
Equation (3.6) and (3.5), for the simple and exact models, are quite similar with the
internal forces for the pressure loaded model shown in Figures 3.20d and 3.21d,
respectively. Recalling Equation (3.6) and (3.5), where the beam inertia has been
omitted as follows:

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
69
( )( )( )( )
( )
( )( )
11 1
21 1
2
2 20 0 2
22
ˆ
ˆ0,
ˆ
0 ˆ
l l
QN H
G MvEI d p x t d
N H Q
G M
χ χ
χχ χ
χ χ χ
χ
′′ ′′ ∂
− = ′′ ∂
′′
∫ ∫ (3.26a)
( )( )( )( )
1
21
2
20
2
l
N
G vEI d
N
G
χ
χχ
χ χ
χ
′′ ′′ ∂
′′ ∂ ′′
∫
( )( )( )( )
( )
11
1 1
20 2
22
ˆ
ˆ,
ˆ
ˆ
l
QN
G Mp x t d
N Q
G M
χ
χχ
χ
χ
− =
∫ (3.26b)
With the aid of Equations (B.15) to (B.19) in Appendix B, the author is able to rewrite
the 1st term on the left hand side of Equation (3.26) as follows:
1
2 2
1
3
2
2 2
2
12 6 12 6
ˆ6 4 6 2
12 6 12 6
ˆ6 2 6 4
z
z
vl l
l l l lEI
vl ll
l l l l
θ
θ
− −
− − − −
( )
( )( )
11
1
20 2
2
ˆ
ˆ0,
ˆ
0 ˆ
l
QH
Mp x t d
H Q
M
χ
χχ
− =
∫ (3.27a)
1
2 2
1
3
2
2 2
2
12 6 12 6
ˆ6 4 6 2
12 6 12 6
ˆ6 2 6 4
z
z
vl l
l l l lEI
vl ll
l l l l
θ
θ
− −
− − − −
( )( )( )( )
( )
11
1 1
20 2
22
ˆ
ˆ,
ˆ
ˆ
l
QN
G Mp x t d
N Q
G M
χ
χχ
χ
χ
− =
∫ (3.27a)
where the nodal displacements 1 1 2 2ˆ ˆ, , and z zv vθ θ are obtained directly from ANSYS.
Finally, substituting Equations (3.14) and (3.19) into Equation (3.27) gives:
1
2 2
1
3
2
2 2
2
12 6 12 6
ˆ6 4 6 2
12 6 12 6
ˆ6 2 6 4
z
z
vl l
l l l lEI
vl ll
l l l l
θ
θ
− −
− − − −
11
1
2 2
2
ˆ
ˆ0
ˆ
0 ˆ
QH
MP
H Q
M
− =
(3.28a)
[k] [u] [fext] [fint]

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
70
1
2 2
1
3
2
2 2
2
12 6 12 6
ˆ6 4 6 2
12 6 12 6
ˆ6 2 6 4
z
z
vl l
l l l lEI
vl ll
l l l l
θ
θ
− −
− − − −
11
1 1
2 2
22
ˆ
ˆ
ˆ
ˆ
QN
G MP
N Q
G M
− =
(3.28a)
Examining Figure 3.19a using Equation (3.28a), the internal forces in the beam for the
simple model are given in Table 3.5. It should also be noted that the external pressure
[fext] in Table 3.5 has already been computed in Equation (3.22).
Table 3.5: Internal forces using Equation (3.28a) for simple model
Ele
me
nt
1
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 0.00E+00 -36.66 0.00 -36.66
1278413 5326720 -1278413 2663360 2.45E-04 0.00 0.00 0.00
-409092 -1278413 409092 -1278413 1.35E-03 36.66 0.00 36.66
1278413 2663360 -1278413 5326720 1.59E-04 -229.13 0.00 -229.13
Ele
me
nt
2
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.35E-03 -2.83 33.84 -36.66
1278413 5326720 -1278413 2663360 1.59E-04 229.13 0.00 229.13
-409092 -1278413 409092 -1278413 1.79E-03 2.83 22.56 -19.74
1278413 2663360 -1278413 5326720 -1.99E-05 -246.75 0.00 -246.75
Ele
me
nt
3
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.79E-03 19.74 0.00 19.74
1278413 5326720 -1278413 2663360 -1.99E-05 246.75 0.00 246.75
-409092 -1278413 409092 -1278413 1.19E-03 -19.74 0.00 -19.74
1278413 2663360 -1278413 5326720 -1.59E-04 -123.37 0.00 -123.27
Ele
me
nt
4
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.19E-03 19.74 0.00 19.74
1278413 5326720 -1278413 2663360 -1.59E-04 123.37 0.00 123.37
-409092 -1278413 409092 -1278413 0.00E+00 -19.74 0.00 -19.74
1278413 2663360 -1278413 5326720 -2.05E-04 0.00 0.00 0.00
In order to correctly interpret Table 3.5, one should recall the sign convection adopted
for positive shear force and bending moment in Equation (B.1) as follows:
( ) ( )1 2ˆ ˆ0 ; Q Q Q Q l= − = + (3.29a)
( ) ( )1 2ˆ ˆ0 ; M M M M l= − = + (3.29b)
[k] [u] [ku] [fext]
[fint]
[k] [u] [fext]
[fint]

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
71
Thus, examining Table 3.5 with Equation (3.29), one can conclude that the negative
values at local node 1 of the element (first two rows of each element) indicate a
positive internal force, while the negative values at local node 2 of element (last two
rows of each element) indicate a negative internal force. Similarly, examining Figure
3.19b using Equation (3.28b), the internal forces in the beam for the exact model are
presented in Table 3.6. Again, the external pressure [fext] is computed in Equation (3.22).
Table 3.6: Internal forces using Equation (3.28b) for exact model
Ele
me
nt
1
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 0.00E+00 -36.66 0.00 -36.66
1278413 5326720 -1278413 2663360 2.65E-04 0.00 0.00 0.00
-409092 -1278413 409092 -1278413 1.48E-03 36.66 0.00 36.66
1278413 2663360 -1278413 5326720 1.79E-04 -229.13 0.00 -229.13
Ele
me
nt
2
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.48E-03 -0.10 36.55 -36.66
1278413 5326720 -1278413 2663360 1.79E-04 279.89 50.76 229.13
-409092 -1278413 409092 -1278413 1.94E-03 0.10 19.85 -19.74
1278413 2663360 -1278413 5326720 -3.15E-05 -280.59 -33.84 -246.75
Ele
me
nt
3
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.94E-03 19.74 0.00 19.74
1278413 5326720 -1278413 2663360 -3.15E-05 246.75 0.00 246.75
-409092 -1278413 409092 -1278413 1.26E-03 -19.74 0.00 -19.74
1278413 2663360 -1278413 5326720 -1.70E-04 -123.37 0.00 -123.27
Ele
me
nt
4
Stiffness matrix Nodal Disp External Pressure Internal Forces
409092 1278413 -409092 1278413 1.26E-03 19.74 0.00 19.74
1278413 5326720 -1278413 2663360 -1.70E-04 123.37 0.00 123.37
-409092 -1278413 409092 -1278413 0.00E+00 -19.74 0.00 -19.74
1278413 2663360 -1278413 5326720 -2.17E-04 0.00 0.00 0.00
As before, one requires Equation (3.29) in order to correctly interpret Table 3.6.
Comparing the internal forces in Table 3.5 and 3.6 with Figures 3.20d and 3.21d, the
reader can see that the simple and exact models have the same internal forces as the
pressure applied between the two consecutive nodes. Moreover, the internal forces
computed by element stiffness [k] and its nodal displacement [u] given by [ku] are
identical to the ANSYS internal forces in Tables 3.1 to 3.4, which indicate that
ANSYS neglects the external pressures on an element when it computes the beam’s
internal forces, for a point force applied to a node on the beam. To summarize, the
[k]
[u]
[ku]
[fext] [fint]

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
72
author’s simple and exact numerical models apply an external pressure load to the
element. ANSYS then transfers these loads to the nodes as nodal forces. However,
ANSYS uses the element stiffness and nodal displacement to compute the internal
forces while neglecting the pressure load applied to the element. This, in turn, gives
an inaccurate solution as ANSYS does not adjust the internal forces to the correct
values. With the aid of Table 3.5 and Table 3.6, the author has shown how to correct
the internal forces. Nevertheless, the author is satisfied with the inaccurate numerical
values given by ANSYS.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
73
3.2.3 Application of single load traversing Boyne Viaduct
The author is now in a position to analyse the Boyne Viaduct subjected to a single
moving load using the simple model. This system is used because of its faster
execution time and its reasonably good results, provided that the distance between
nodes is not excessively large. As described in Section 2.3, the author is only
concerned with the analysis of the centre span of the bridge; therefore, the outer
bridge structures are omitted from this study. However, approach spans with a zero
deflection are used, so the train experiences no vertical acceleration until it enters the
bridge. In the following example, the author focuses on a two-dimensional
representation of the Boyne Viaduct railway bridge as illustrated in Figure 3.24;
where all dimensions, section sizes and properties related to the bridge structure are
defined in Appendix F. As shown in Figure 3.24, the total length of the bridge is
80.77 m, with each of the 10 bays having a length 8.077 m.
Figure 3.24: Two-dimensional representation of the Boyne Viaduct railway bridge
The author begins by investigating the dynamic response of the two-dimensional
Boyne Viaduct with two different vehicle speeds: slow (10 km/hr or 2.778 m/s); and
fast (164 km/hr or 45.55 m/s). Furthermore, the weight of the moving load P is equal
to the weight of the bridge i.e. 1P G = . It is also worth noting that the faster speed of
164 km/hr is currently the maximum operating speed of the 201 Class locomotive
used by Irish-Rail (Wikipedia, 2007), while future locomotives purchased by Irish-
Rail are likely to reach speeds of 200 km/hr or higher.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
74
In Figure 3.25 the vertical displacement and internal axial forces at mid-span of the
bridge as a function of time are plotted, respectively. In each case, the static effects
have been omitted from the results; thus, only the dynamic effects of the vehicle on
the bridge are observed and time t is arranged in such a manner that that the moving
load exits the right support of the bridge at 1ct L = . These results are then made
dimensionless by dividing the dynamic deflection and axial force, by the maximum
static deflection and axial force of the loaded structure at mid-span, and will be known as
the deflection coefficient and axial force coefficient, respectively. It can be seen from Figure
3.25 that the magnitude of the results is greatly influenced by the speed of the vehicle.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt Moving load at 10 km/hr
Moving load at 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
Moving load at 10 km/hr
Moving load at 164 km/hr
Figure 3.25: (a) Deflection; (b) axial force at mid-span of the Boyne Viaduct subject
to a moving load travelling at 10 and 164 km/hr
(a)
(b)
Top chord
Bottom chord

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
75
Hence, a more in-depth analysis of the Boyne Viaduct subjected to a moving load at a
wider range of vehicle speeds is carried out. This varied speed can be made
dimensionless by means of the critical speed cr
c of the vehicle. The critical speed is
the speed of the vehicle at which the vehicle travels a distance of twice the length of
the bridge in a time equal to the first natural period of the bridge and is expressed
using Equation (C.53) as follows:
12cr
c f L= (3.30)
where 1f is the first natural frequency of the bridge. Therefore, the dimensionless
speed ratio α is then defined from Equation (C.52) as:
1
= 2
cr
c c
c f Lα = (3.31)
To explain Equations (3.30) and (3.31), the author must first conduct a modal analysis
of the two-dimensional Boyne Viaduct in order to determine its first natural
frequency. In Figure 3.26, the author presents the first two-flexural mode shapes and
their respective bridge frequencies obtained from a modal analysis. Using Equation
(3.30) and 1 3.403 Hzf = , the critical speed of a vehicle is computed as 550 m/s,=cr
c
which is equivalent to 1980 km/hr. Since the Boyne Viaduct is unlikely to ever
experience such a high speed, the author is really only interested in a more realistic
range of speeds between 0 km/hr to 300 km/hr i.e. 0 0.15α< < . However, given that
the results are presented in a dimensionless format, they can be compared with the

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
76
results of similar literature studies; thus, one also considers the ranges of vehicle
speeds between 0 1.0α< < .
Figure 3.26: 2D Natural frequencies and their corresponding mode shapes
In addition, the maximum dynamic deflection and axial force experienced by the
bridge at different speeds can be made dimensionless by dividing their value by the
maximum static load a mid-span; thus, defining their dynamic amplification factor
and are represented as follows (see Appendix G.3 for the vehicle positioning):
maximum dynamic deflection at midspan of the bridge =
maximum static deflection at midspan of the loaded bridgeU
DAF (3.32a)
maximum dynamic axial force at mid-span of the bridge =
maximum static axial force at mid-span of the loaded bridgeA
DAF (3.32b)
Figure 3.27 plots the dynamic amplification factor DAFU and DAFA, respectively, for
the range of speed values between 0 1.0α< < . Referring to Figure 2.2, the reader
should notice a favourable likeness between the dynamic amplification factor DAFU
of the Boyne Viaduct and a simply supported beam subjected to a moving load. From
the inspection of Figure 3.27, it is observed that the dynamic amplification factor
DAFU and DAFA are close to the minimum values at a speed ratio 0.21α ≈ , while at a
maximum value at a speed ratio 0.5α ≈ . However, these values fall outside the
realistic speeds, which are represented to the left of the vertical dashed line. A close-
up view of DAFU at these realistic speed values can be seen in Figure 3.28.
(a) 1st mode shape - 1 3.403 Hzf = (b) 2
nd mode shape - 2 9.872 Hzf =

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
77
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FU
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FA
Bot Chord
Top Chord
Figure 3.27: Dynamic amplification factor versus speed ratio at mid-span of the
Boyne Viaduct: (a) vertical displacement; (b) axial force
1.00
1.05
1.10
1.15
1.20
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Figure 3.28: Close-up of Figure 3.27a with realistic vehicle speeds
(a)
(b)
Maximum realistic speed of a train traversing
the Boyne Viaduct (300 km/hr)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
78
3.3 Multiple Moving Forces as a Function of Time
3.3.1 Development of multiple moving forces
The author expands the single moving force to several moving forces traversing a
beam. Originally, to avoid having more than one point force on an element at a time,
the length of a beam element had to be less than half the distance between wheels of a
vehicle. The drawback to this is that a large number of nodes are required to discretize
the beam. Therefore an alternative system, which allows several point forces on a
single finite element at once, is now developed. As before, the ANSYS node-to-
surface contact element system is also modified to include several moving forces for
comparison purposes. Equation (3.1b) is rewritten for several moving point forces as
follows:
( ) ( )2 2
, ,
carriages = bogie = wheels
,cN
j k m
j k m
p x t P x ctδ=
= − + ∆∑ ∑ ∑ , ,
0j k m
Lt
c
+ ∆≤ ≤ (3.33)
where ∆ incorporates the distance between carriages, the distance between bogies of a
single carriage, and the distance between wheels of a single bogie, which is only valid
when one or more moving point forces are on a particular beam element, L is the
length of the bridge.
3.3.1.1 Simple solution without overlapping time functions
Figure 3.29 presents a set of railway carriages that consists of a carriage supported by
two bogies, with each bogie supported by two axles, and a pair of wheels supports
each axle, which in the 2-dimensional model become a single point force. The front
pair of wheels of the carriage j is represented by the symbol Pj, the next pair of wheels
by Qj and the last two pairs by Rj and Sj respectively. According to Bowe &

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
79
Mullarkey (2000: p. 44), Aw is the distance the between the two axles of a single
bogie, Bw is the distance between centres of two bogies of a single carriage and Cw is
the distance between the rear axle of one carriage and the front axle of the carriage
behind it. It is clear from this set of dimensions that in the case of a single carriage the
distance between the rear axle of the front bogie and the front axle of the rear bogie is
(Bw-Aw). In this thesis, the distance Aw is considered to be smaller than the distance Cw
and (Bw-Aw). The force on each axle is P, which is a quarter of the combined weight of
a single carriage, two bogies and their associate axles and wheels.
Leading Carriage
Figure 3.29: Set of railway carriages (Bowe & Mullarkey, 2000)
From Figure 3.29, the distance from the front axle of the leading carriage to the front
axle of carriage j is as follows:
( )( ) ( )1 1 1j w w w w
P P A B C j D j= + + − = − (3.34)
The distance from the front axle of the leading carriage to the second axle of carriage j
is defined as:
( )( ) ( )1 1 1j w w w w w w
Q P A B C j A D j A= + + − + = − + (3.35)
Carriage jCarriage 1j +
1jP + jP 1PjQ 1Q1R
jR 1SjS
wB
wA
wC
w wB A−
w w w wD A B C= + +
For a typical train
(see Section G.2 in Appendix G)
( )w w w wA C B A< < −
Carriage 1

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
80
The distance from the front axle of the leading carriage to the third axle of carriage j
can be written as:
( ) ( ) ( )11 1
j w w w w w wR P A B C j B D j B= + + − + = − + (3.36)
And finally, the distance from the front axle of the leading carriage to the fourth axle
of carriage j is as follows:
( ) ( ) ( )11 1
j w w w w w w w wS P A B C j A B D j A B= + + − + + = − + + (3.37)
Now combining Equation (3.33), (3.34), (3.35), (3.36) and (3.37) in the right-hand
side of Equation (3.1) gives the following equation for several point forces traversing
a simply supported beam:
4 2
4 2
( , ) ( , )v x t v x tEI m
x t
∂ ∂+ =
∂ ∂
[ ( ) ( ) ( )2 2
carriages = bogie = wheels
1 1 1cN
w w w
j k m
P x ct D j B k A mδ=
− + − + − + − =
∑ ∑ ∑
[ ] [ ]1
( 1) ( 1)cN
w w w
j
P x ct D j x ct D j Aδ δ=
− + − + − + − +∑
[ ] [ ]( 1) ( 1)w w w w wx ct D j B x ct D j A Bδ δ+ − + − + + − + − + + (3.38)
where Nc is the number of carriages and ( ) ( ) ( ), , is 1 1 1
j k m w w wD j B k A m∆ − + − + − ,
which is only valid when the wheels of the train are between x = 0 and , ,
.j k m
x L= + ∆
Once the final wheel has left the bridge, the system then undergoes free vibration.
wheel 1 = P wheel 2 = Q
bogie 1
wheel 1 = R wheel 2 = S
bogie 2

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
81
The position of the m-th wheel, of the k-th bogie, of the j-th carriage, of the train can
be written as follows:
( ) ( ) ( )1 1 1 0w w w
x ct D j B k A m− + − + − + − = (3.39)
Using Equation (3.39), one is able to compute the time that a particular wheel arrives
on a specific point on the beam. For example, the time a wheel arrives on the left hand
support of the beam i.e. x = 0, one gets:
( ) ( ) ( )1 1 1 0w w wct D j B k A m− + − + − + − =
( ) ( ) ( )1 1 1w w w
D j B k A mt
c
− + − + −= (3.40a)
Equally, the time when a wheel arrives on the right hand support of the beam, x = L;
thus, giving:
( ) ( ) ( )1 1 1 0w w wL ct D j B k A m− + − + − + − =
( ) ( ) ( )1 1 1w w w
L D j B k A mt
c
+ − + − + −= (3.40b)
Similarly, the time when a wheel arrives on node i, x = xi, gives:
( ) ( ) ( )1 1 1 0i w w wx ct D j B k A m− + − + − + − =
( ) ( ) ( )1 1 1i w w w
x D j B k A mt
c
+ − + − + −= (3.40b)
The front wheel of the front bogie ( )1, 1m k= = of carriage j, Pj, is between node i-1
and node i between the times
−+−
c
jD
c
x wi )1(1 to ( 1)i wx D j
c c
− +
, and between

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
82
node i and node i+1 between the times ( 1)i wx D j
c c
− +
to 1 ( 1)i wx D j
c c
+ − +
. Since
wheel P1 is over left hand support at time t = 0, P1 influences node i between the
times c
xi 1− andc
xi 1+ ; hence, Pj influences node i between the times
−+−
c
jD
c
x wi )1(1
and
−++
c
jD
c
x wi )1(1 . The wheels Qj, Rj, and Sj follow a similar pattern to wheel Pj.
The issue of time just discussed can be incorporated in Equation (3.38) using
Heaviside functions H as follows:
4 2
4 2
( , ) ( , )v x t v x tEI m
x t
∂ ∂+ =
∂ ∂
[ ]( ) ( )
1
1 1( 1)
cNw w
w
j
D j D jLP x ct D j t t
c c cδ
=
− − − + − ⋅ − − − −
∑ H H
[ ]( ) ( )1 1
( 1)w ww w
w w
D j D jA ALx ct D j A t t
c c c c cδ
− − + − + − + ⋅ − − − − − −
H H
[ ]( ) ( )1 1
( 1)w ww w
w w
D j D jB BLx ct D j B t t
c c c c cδ
− − + − + − + ⋅ − − − − − −
H H
[ ]( ) ( )1 1
( 1)w ww w w w
w w w
D j D jA B A BLx ct D j A B t t
c c c c cδ
− − + ++ − + − + + ⋅ − − − − − −
H H
(3.41a)
where
( )0 for < 0
1 for 0
t
t
=
≥H t (3. 41b)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
83
Figure 3.30 is a plot of the nodal force versus time and it tells the reader the effects of
carriage j and the front wheel of carriage j+1 on node i. In Figure 3.30 time breaks or
gaps are required between time-force functions to eliminate overlaps, which simplify
the computations i.e. linear functions.
ijInfluence of carriage on node
Gap 1 Gap 2 Gap 3
[xi-1 +
Dw (j-1
)]/c
[(xi +
Dw (j-1
)]/c
[xi+
1 +D
w (j-1)]/c
[xi-1 +
Dw (j-1
)]/c + A
w /c
[xi +
Dw (j-1
)]/c + A
w /c
[xi+
1 +D
w (j-1)]/c +
Aw /c
[xi-1 +
Dw (j-1
)]/c + B
w /c
[xi +
Dw (j-1
)]/c + B
w /c
[xi+
1 +D
w (j-1)]/c +
Bw /c
[xi-1 +
Dw (j-1
)]/c + (A
w +
Bw )/c
[xi +
Dw (j-1
)]/c + (A
w +
Bw )/c
[xi+
1 +D
w (j-1)]/c +
(Aw
+ B
w )/c
[xi-1 +
Dw ( j )]/c
Figure 3.30: Influence of carriage j on node i (Bowe & Mullarkey, 2000)
With the aid of Figure 3.30, it is clear that the size of Gap 1 is as follows:
[ ] [ ])1(1
)1(1
11 −+−+−+ +− jDxcc
AjDx
cwi
wwi = [ ]
c
Axx
c
wii +− +− 11
1 =
c
A
c
l w+−2
= c
lAw 2− (3.42)
Gap 1 must be greater than zero to prevent any overlap; therefore, Aw must be the
greater than 2l, where l is distance between nodes on the beam. This implies that there
should be at least two elements between the two axles of a bogie. Similarly from
Figure 3.30, Gap 2 is defined as:
t
Wheel jP Wheel jQ Wheel jR Wheel jS 1Wheel jP +
P

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
84
[ ]c
ABxx
c
ww
ii
−+− +− 11
1 =
c
AB
c
l ww −+
−2 >
c
A
c
l w+− 2
, because (Bw - Aw) > Aw (3.43)
Therefore Gap 2 is greater than zero. Using Figure 3.30, Gap 3 can be written as:
[ ]c
BA
c
Dxx
c
www
ii
)(111
+−+− +− =
c
C
c
l w+− 2
> c
A
c
l w+− 2
> 0, because Cw > Aw (3.44)
Again, Gap 3 is clearly greater than zero because Gap 1 is greater than zero.
The inequality Aw > 2l demands that a large number of nodes be used to discretize the
beam; however, this model is less complicated than other techniques and still has a
reasonably quick execution time. Getting rid of Gaps 1, 2 and 3 has the advantage of
reducing the number of nodes required on the beam; however, the complexity of the
force as a function of time greatly increases as the number of wheels on a beam
element increases.
3.3.1.2 Simple and exact models with overlapping time functions
In the previous section, the notation of overlapping time function is not considered as
the distance between wheels of a single bogie Aw is always larger than twice the
length of a single element; however, the impracticality of that model is that as the
distance between wheels decreases, the number of elements required in the model
increases. Therefore, by considering overlapping time function, one can reduce the
number of elements in the model as the distance between axles of a single bogie Aw,
no longer determines the length of a beam element l. Nevertheless, the drawback to
this system is that the overlapping time-function requires a larger preparation time, in
the pre-processing step, in order to compute the more complex time function.
Fortunately, Equation (3.38) can still be used to calculate this complex overlapping
time function.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
85
For demonstration purposes, Figure 3.31 presents the spatial and time domain of two
moving forces, with the same magnitude, traversing a beam; for several values of
wA l for node i.
(a) Influence of two point forces at a distance 2l apart on node i
(b) Influence of two point forces at a distance 1.5l apart on node i
(c) Influence of two point forces at a distance l apart on node i
Spatial Domain for node i Time Domain for node i
2wA l=
1Q1P
l
i
P
4l
c
t0
7
2
l
c
t
P
1Q 1P
1.5wA l=
l
i
3l
cl
wA l=
1Q1P
i t
P
0
0
(1)
(2)
(3)
(4)
(5)
(6)
(1)
(2)
(3)
(5)
(6)
(4)
(1)
(2)
(6)
(3) (4)
(5)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
86
(d) Influence of two point forces at a distance 0.5l apart on node i
Figure 3.31: Relationship between spatial and time domain under different load
conditions for two moving forces
Examining Figure 3.31, the first observation is that the time lag between the two loads
is w
A c ; therefore, each time domain occurs over 2
wA l
c
+. The next observation is
that when the first load P1 is on the element to right of node i, while the second load
Q1 is on the element to left of node i, the magnitude of the load applied is constant as
illustrated in Figure 3.31(b) to 3.31(d). The final observation is that when the two
loads are on the same element to the left or right of node i, the slope of the time
function doubles as shown in Figure 3.31(d). For completeness, the author also plots
the time domains, of the two moving forces using the exact numerical model with
overlapping time functions (forces and moment) and can be found in Figure G.6 in
Appendix G.
t0
(1) P1 arrives on node i-1; (2) P1 arrives on node i; (3) P1 arrives on node i+1
(4) Q1 arrives on node i-1; (5) Q1 arrives on node i; (6) Q1 arrives on node i+1
(6) 5
2
l
cl
0.5wA l=P
i
1Q 1P
(1)
(2)
(3)
(5)
(4)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
87
3.3.1.3 Multiple moving forces using ANSYS contact elements
Modifying Section 3.2.1.3, the author expands the system to incorporate several
railway carriage wheels, which in turn increases the number of contact elements
required in this analysis. The front pair of wheels of carriage j is represented by the
point mass element MP j, the next pair of wheels by MQ
j and the last two pairs by MR
j
and MS j respectively as can be seen in Figure 3.32 (Bowe & Mullarkey, 2000; p. 47).
4 Contact Elements
Target Surface
Leading Carriage
PPPPPPP PP PPP
Carriage 1jCarriagej +1Carriage
Figure 3.32: Establishing contact elements between wheels and beam
The nodes associated with these point mass elements are once again defined as
contact nodes, while the nodes on the beam are defined as the target surface. Contact
elements are then established between the contact nodes and the target surface as
shown in Figure 3.32. Each point mass element is given zero mass and a vertical force
P is applied to the associated node.
It should be noted that using the ANSYS node-to-surface contact elements to model
several moving forces has its drawbacks, as the user must also provide entry and exit
approaches on either side of the beam to simulate the train entering and leaving the
bridge structure; thus, increasing the number of contact elements required.
1j
SM + 1j
RM + 1j
QM + 1j
PM + 1
SM 1
RM1
QM 1
PM
wB wC wAw wB A−
w w w wD A B C= + +
j
SM j
RMj
QM j
PM

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
88
3.3.2 Validation of multiple moving forces as a function of time
In order to validate the author’s multiple moving force system; one again compares
the results from the developed systems with the results of the contact elements of
ANSYS using an example obtained from the literature.
In this first example, the bridge and train properties adopted are similar to those of
Yang & Wu (2001), such that the bridge has a length L of 30m, Young’s modulus of
elasticity E of 2.87x107 kN/m
2, moment of inertia I of 6.635 m
4, mass per unit length
m of 32.4 t/m, Poisson’s ratio ν of 0.2; hence, the first natural frequency of the bridge
ω1 is 25.666 rad/sec. Again, one ignores the gravitational and damping effects of the
bridge. In contrast, the train comprises of 10 identical railway carriages traversing the
bridge at a constant speed c of 27.778 m/s (100 km/hr), with each railway carriage
consisting of a two-wheel assembly i.e. no bogies. The distance between wheels of a
single carriage Aw is 19 m, while the distance between the rear wheel of one carriage
and the front wheel of the following carriage Cw is 6m; therefore the repetitive
distance between the front wheels of each carriage Dw = 19 + 6 = 25 m. Each wheel of
the railway carriage applies a force P of -218.2 kN to the bridge. As before, the
Newmark-β time integration method (Bathe, 1996) with 1000 equal time steps is used
to solve the transient analysis. Time t is arranged in such a manner that the front
wheel of the first railway carriage is at the left hand support at t = 0 sec. In addition,
the initial displacement and velocity of the beam are equal to zero at time t = 0 sec.
For the simple model without overlapping time functions the bridge has been
discretized into 16 beam elements, while only 8 beam elements are used to discretize
the bridge for the simple model with overlapping time functions as well as when using
the ANSYS contact element. All approach spans used have zero deflections.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
89
Figure 3.33 plots the influence of four wheels i.e. the 2nd
to the 5th
wheel of the train,
on the mid-span node of the bridge as a function of time for the simple model with
and without overlapping time function. One can see from Figure 3.33 that the simple
model with overlapping time function influences the mid-span node over a longer
time interval because there are fewer nodes used in that system.
-300
-250
-200
-150
-100
-50
0
1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6
Time (sec)
Fo
rce
(k
N)
Simple Model - No Overlapping
Simple Model - Overlapping
Figure 3.33: Influence of the 2nd
to the 5th
wheel of the train on a mid-span node
The vertical displacement, acceleration and bending moment at mid-span of the beam
as a function of time for the three different systems can be seen in Figure 3.34. It can
be seen that there is a great likeness among the results of all three systems in
magnitude and curvature. It can also be noted that the leading wheel of the train
arrives at the right support at 30/27.778 = 1.08 sec, as indicated by the vertical dashed
line on each diagram.
No Overlapping
(1) 2nd wheel left of mid-span node; (2) 2nd wheel at mid-span node; (3) 2nd wheel right of mid-span node
(4) 3rd wheel left of mid-span node; (5) 3rd wheel at mid-span node; (6) 3rd wheel right of mid-span node
Overlapping
(i) 2nd wheel left of mid-span node; (ii) 2nd wheel at mid-span node; (iii) 2nd wheel right of mid-span node
(iv) 3rd wheel left of mid-span node; (v) 3rd wheel at mid-span node; (vi) 3rd wheel right of mid-span node
(i) (1) (3) (4) (6) (vi)
(2)
(ii) (5)
(v)
(iv) (iii)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
90
-0.0015
-0.0012
-0.0009
-0.0006
-0.0003
0.0000
0 2 4 6 8 10
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
) Simple Model - No Overlapping
Simple Model - Overlapping
ANSYS CE
-0.30
-0.20
-0.10
0.00
0.10
0.20
0 2 4 6 8 10
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Simple Model - No Overlapping
Simple Model - Overlapping
ANSYS CE
0
1000
2000
3000
4000
5000
0 2 4 6 8 10
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
Simple Model - No Overlapping
Simple Model - Overlapping
ANSYS CE
Figure 3.34: (a) Vertical displacement; (b) acceleration; (c) bending moment at
mid-span of the beam as a function of time for 10 identical railway
vehicles
Leading wheel over RHS
(c)
(b)
(a)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
91
The second example considered uses the same bridge and train properties to those of
Yang et al. (1997), such that the bridge has a length L of 20m, Young’s modulus of
elasticity E of 29.43x106 kN/m
2, moment of inertia I of 3.81 m
4, mass per unit length
m of 34.088 t/m, Poisson’s ratio ν of 0.2; therefore, the first natural frequency of this
bridge ω1 is 44.75 rad/s (or f1 = 7.122 Hz). As before, one ignores the gravitational
and damping effects of the bridge. The train model comprises of 5 railway carriages,
each having a car length Dw of 24m, with each railway carriage consisting of a two-
wheel assembly i.e. no bogies. The distance between wheels of a single carriage Aw is
18 m and the force applied to the bridge by each wheel P is –215.6 kN. Again, time t
is arranged in such a manner that the front wheel of the first railway carriage is at the
left hand support at t = 0 sec. In addition, the initial displacement and velocity of the
beam are equal to zero at time t = 0 sec. In this example, the bridge is discretized into
10 beam elements for the simple model with overlapping time functions.
The vertical displacement at mid-span of the beam as a function of time for two
different train speeds; 26 m/s (94 km/hr) and 34 m/s (122 km/hr) are plotted in
Figures 3.35a and 3.35b, respectively. From inspection of Figure 3.35a, the reader can
see that with each passing vehicle; the bridge tends to deflect by a similar amount
each time, while in Figure 3.35b the bridge is inclined to experience an increase in the
deflection similar to the effects of resonance with each passing vehicle. Furthermore,
with a change of notation, Yang et al. (1997) and Fryba (2001) formulise that the
resonance of bridges is likely to occur due to the repetitive vehicle loading of the front
wheel of the train at the following speed ratio:
1, 2, 3...2
wD
nnL
α = = (3.45)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
92
Substituting Equations (3.30) and (3.31) into Equation (3.45), one then finds the speed
at which resonance is likely to occur on the bridge, as follows:
1
1, 2, 3...2 2
w
cr
Dc cn
c f L nL= = = (3.46a)
1 1, 2, 3...wf D
c nn
= = (3.46b)
In addition, Yang et al. (1997) has formulised a condition of cancellation, whereby
repetitive vehicle loadings can suppress the bridge resonance and can be written in
terms of the speed ratio, with a change of notation, as follows:
1 1, 2, 3...
2 1n
nα = =
− (3.47)
Substituting Equations (3.30) and (3.31) into Equation (3.47) then gives the speeds at
which the condition of cancellation is likely to occur on the bridge as follows:
1 1, 2, 3...
2 1cr
cn
c n= =
− (3.48a)
12
= 1, 2, 3...2 1 2 1
crc f L
c nn n
= =− −
(3.48b)
Using Equations (3.45) and (3.46b) as well as Equations (3.47) and (3.48b), the author
computes six speeds at which resonance and cancellation effects are likely to occur
for this particular bridge due to repetitive vehicle loading and these results are
presented in Table 3.7. From the results in Table 3.7, one can see that resonance of the
bridge occurs when the train crosses the bridge at 34.2 m/s (123.1 km/hr), which is in
good agreement with Figure 3.35b.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
93
Table 3.7: Yang et al. (1997) bridge model - resonance and cancellation speeds
Moreover, from the results in Table 3.7 it can be seen that when the train has a speed
of 25.9 m/s (93.6 km/hr), the condition of cancellation occurs, which is in good
agreement with Figure 3.35a. As an example, to show that the condition of
cancellation suppresses the risk of resonance on the bridge, the author will also plot
the vertical displacement at mid-span of the beam as a function of time subjected to a
train travelling at 57 m/s (205 km/hr), which is presented in Figure 3.35c. From
inspection of Table 3.7, the reader can see that both resonance and cancellation share
this particular speed.
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
m)
Simple model - Overlapping - Train speed = 26m/s
Yang et al. (1997) Solution
Risk of Resonance Condition of Cancellation
Eq. (3.45) Eq. (3.46b) Eq. (3.47) Eq. (3.48b)
n α c (m/s) α c (m/s)
1 0.60 170.9 1.00 284.9
2 0.30 85.5 0.33 95.0
3 0.20 57.0 0.20 57.0
4 0.15 42.7 0.14 40.7
5 0.12 34.2 0.11 31.7
6 0.10 28.5 0.09 25.9
Leading wheel over RHS
(a)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
94
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
m)
Simple model - Overlapping - Train speed = 34m/s
Yang et al. (1997) Solution
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5
Ve
rtic
al D
isp
lac
me
nt (m
m)
Dimensionless time ct/L
Simpel model - Overlapping - Train speed = 26 m/s
Simpel model - Overlapping - Train speed = 34 m/s
Simpel model - Overlapping - Train speed = 57 m/s
Figure 3.35: Vertical displacement at mid-span of the beam: (a) Train speeds of
26m/s; (b) Train speeds of 34m/s; (c) Train speeds of 57m/s
As can be seen in Figure 3.35c, the vertical displacement at mid-span of the beam
tends to deflect by the same amount with each passing train. This indicates that
resonance does not occur at this particular speed, which is in good agreement with
Yang et al. (1997) that the cancellation effect supersedes the resonance effects. It can
be noted that the first natural frequency of long spanning bridges is generally low,
which makes them more susceptible to resonances of carriages with closely spaced axles.
Leading wheel over RHS
(b)
(c) Rear wheel of last carriage on RHS

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
95
One finishes by examining the dynamic deflection of this particular bridge at various
train speeds using the simple model with overlapping time functions. From the
literature as well as Yang et al. (1997) the impact factor IF can be defined as follows:
( ) ( ) ( )1 1
( ) ( )
d s d
U
s s
R x R x R xIF DAF
R x R x
−= = − = − (3.49)
whereby Rd is the maximum dynamic deflection of beam and Rs is the maximum
static deflection of the beam at position x due to the action of the moving loads. In this
particular example, the maximum deflection will occur at mid-span of the beam.
A plot of the impact factor IF for a range of train speed ratios between 0 1.0α< < is
shown in Figure 3.36. In this diagram, the reader can see a good similarity between
the simple model with overlapping time functions and the numerical solution of Yang
et al. (1997). In addition, one can see that the largest impact factor of 5.5,IF = occurs
when the speed ratio α is equal to 0.6, which coincides with Table 3.7.
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Speed ratio αααα
Imp
ac
t fa
cto
r I
Simple Model - Overlapping
Yang et al. (1997) Solution
Figure 3.36: Impact factor at mid-span of the beam at various train speeds

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
96
3.3.3 Application of multiple moving forces traversing the Boyne Viaduct
In this section, the author examines the dynamic response resulting from several
moving loads traversing the Boyne Viaduct railway bridge, where the bridge is
represented as a two-dimensional or three-dimensional structure. In addition, a twin
track structure subjected to a single train or a pair of trains moving in opposite
directions can be easily implemented. In each example, a typical Irish-Rail vehicle is
chosen.
However, to the author’s knowledge, there has never been any experimental data
collected from this particular bridge; hence, the numerical solution obtained in this
thesis is merely a demonstration of the developed systems acting on a real structure.
Nonetheless, Sections 3.2.2 and 3.3.2 have shown that the results of these developed
moving load systems compare admirably with the results of other research studies.
3.3.3.1 Railway Vehicles
The railway vehicles adopted in each of the following examples are a six-axle 201
class locomotive and a four-axle Mark 3 railway coach. The axle spacing and weights
of these particular vehicles were supplied by the Irish Rail’s Structural Design Office,
Inchicore, Dublin and are presented in Figure 3.37. As shown in Figure 3.37, each
wheel of the locomotive exerts a force of 91.25 kN on the rail and each wheel of the
railway coach exerts a force of 58.86 kN on the rail, respectively. In order for the
Boyne Viaduct to experience the full weight of the train over its entire bridge length,
the author has chosen a train consisting of a single six-axle 201 Class locomotive (see
Figure 3.37a) pulling three four-axle Mark 3 railway coaches (see Figure 3.37b), such
that the total distance between the front axle and rear axle of the train is equal to
( ) ( )21.051 3 23.000 1.969 2.200 85.882m.+ × − + =

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
97
Figure 3.37: Typical axle spacing and load of Irish-Rail vehicles: (a) 201 Class
locomotive; (b) Mark 3 railway coach
3.3.3.2 Two-Dimensional Boyne Bridge
Modifying Section 3.2.3, the two-dimensional Boyne Bridge is now subjected to a
moving train comprising a locomotive and several railway carriages, which can be
simulated using either the simple model with or without overlapping time functions.
However, it is important to note that for the simple model without overlapping time
function, one requires that the bottom chord of the truss be discretized into 100 beam
elements i.e. 10 beam elements per bay, whereas with overlapping time functions, one
can use a single beam element per bay; thus, only requiring 10 beam elements in the
bottom chord of the truss. Table 3.8 presents the time of execution for the simple
model with and without overlapping time function as well as for the contact element
system with 1000 equal time-steps using an Intel Core Duo 2.13 GHz processor with
2048 MB RAM.
(a)
(b)
Mark 3 Railway Coach
201 Class locomotive
Gross Weight = 48 tons
Axle Weight = 12 tons
Axle Load = 117.72 kN
Wheel Load = 58.86 kN
Gross Weight = 111.5 tons
Axle Weight = 18.6 tons
Axle Load = 182.50 kN
Wheel Load = 91.25 kN

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
98
Table 3.8: Time of execution for the developed systems
Time of execution in sec
Timesteps
Simple Model ANSYSCE
No Overlapping Overlapping
(100 beam elements) (10 beam elements) (10 beam elements)
1000 0 42* 0
26 60 55
* = precalculation time prior to executing model
It can be seen from Table 3.8 that the time of execution for the simple model without
overlapping is over 100% faster than the other two systems. However, much of the
slowness for the overlapping system is due to the pre-calculations of the overlapping
time-force functions before it executes the model. By omitting this pre-calculation
from its total execution time, it was found that the overlapping system is
approximately 33% faster than the former method. Nonetheless, most results obtained
in this section use the simple model without overlapping due to its speed of execution.
Figure 3.38 plots the influence of the train on the mid-span node of the bridge as a
function of time for the simple model with and without overlapping.
-300
-250
-200
-150
-100
-50
0
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Dimensionless time ct /L
Fo
rce
(k
N)
Simple Model - No Overlapping
Simple Model - Overlapping
Figure 3.38: Influence of the train on a mid-span node

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
99
Somewhat similar to Section 3.2.3, the author examines the dynamic effects of a train
traversing the Boyne Viaduct at a slow (10km/hr) and fast speed (164 km/hr). In
Figures 3.39 the reader can see a plot of the vertical displacement and axial force in
the top and bottom chord at mid-span of the bridge as a function of time. It should
also be noted from the diagram that the front wheel of the train exits the bridge
structure at time 1ct L = . In Figure 3.39, one can see that the dynamic effects are
minimal at the slow speed, while at the higher speed the bridge tends to experience a
noticeable oscillation.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
De
fle
cti
on
co
eff
icie
nt
Multiple Moving Loads - 10 km/hr
Multiple Moving Loads - 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
Ax
ial fo
rce
co
eff
icie
nt
Multiple Moving Loads - 10 km/hr
Multiple Moving Loads - 164 km/hr
Figure 3.39: (a) Vertical displacement; (b) axial force at mid-span of the 2D Boyne
Viaduct due to a train travelling at 10 km/hr and 164 km/hr
(a)
(b)
Bottom Chord
Top Chord

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
100
In addition, plots of the dynamic amplification factors DAFU and DAFA for the range
of speed values between 0 1.0α< < can be seen in Figure 3.40. Unlike in Figure
3.27, the maximum dynamic deflection experienced by the bridge tends to occur at the
critical speed of the vehicle i.e. α = 1.
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FU
201 Loco + 3 MK3 coaches
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FA
201 Loco + 3 MK3 coaches (Top Chord)
201 Loco + 3 MK3 coaches (Bottom Chord)
Figure 3.40: Dynamic amplification factor at mid-span of the 2D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force
In Figure 3.41, the author presents a close-up view of the DAFU taken from Figure
3.40a; where the vertical dash line represents the maximum realistic vehicle speed that
(a)
(b)
Maximum realistic speed of a train traversing the
Boyne Viaduct (300 km/hr)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
101
is of interest i.e. 0.15α = implies that 300 km/hr.c = Examining Figure 3.41, it can
be seen that the results for several moving loads tends to be much lower than the
results for single moving load, as described in Section 3.2.3, mainly because the
several moving loads are applied to the bridge over its length and not concentrated at
a single point. Nevertheless, the curvature of each set of results is very similar.
1.00
1.05
1.10
1.15
1.20
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Multiple Moving Loads
Single Moving Load - Figure 3.28
Figure 3.41: Close-up of Figure 3.40a with realistic vehicle speeds
3.3.3.3 Three-Dimensional Boyne Bridge
Until now, the author has only considered a two-dimensional representation of the
Boyne Viaduct railway bridge whereas a three-dimensional bridge would better
represent the actual structure. Therefore a comparison is made between the results of
the two-dimensional and three-dimensional Boyne Bridge subjected to multiple
moving loads using either of the developed moving load systems.
Figure 3.42 presents a three-dimensional model of the Boyne Bridge, developed using
the ANSYS finite element program. Section sizes and properties related to the bridge
structure can be found in Appendix F. Unlike the two-dimensional structure, cross-

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
102
beams are located between the main nodes of the truss, which in turn support the
longitudinal beams of the three-dimensional bridge structure. The railway tracks are
then positioned directly above the longitudinal beam; however, the railway tracks are
omitted in this study. Nevertheless, one does simulate the train traversing the bridge
along these longitudinal beams. Delgado & Dos Santos (1997) paper presents a train
traversing a bridge at a wide range of speeds with and without bridge ballast. From
their study it is shown that the bridge ballast does not influence their results hence, the
bridge ballast on the Boyne Viaduct has been omitted from this study.
Figure 3.42: Three-dimensional representation of the Boyne Bridge
In the following example, the three-dimensional Boyne Bridge is subjected to the
same train loads used in Section 3.3.3.2 on each rail, while travelling at a slow (10
km/hr) and fast speed (164 km/hr). In Figures 3.43a and 3.43b, the author plots the
vertical displacement and axial forces in the top and bottom chord at mid-span of the
bridge as a function of time. Like the previous results of Figure 3.39, the dynamic
response tends to be minimal at the slow speed, while at the higher speed the bridge
tends to experience slightly less oscillation than that of its two-dimensional
counterpart. In Figures 3.43c the bending moment at mid-span of the cross-beam
located at mid-span of the bridge as a function of time for both speeds is presented. It
should be noted from the diagrams that the front wheel of the train leaves the bridge at
1.ct L =
Longitudinal beams
Cross-beams

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
103
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
De
fle
cti
on
co
eff
icie
nt
Multiple Moving Loads - 10 km/hr
Multiple Moving Loads - 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
Multiple Moving Loads - 10 km/hr
Multiple Moving Loads - 164 km/hr
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Be
nd
ing
mo
me
nt
co
eff
icie
nt
Multiple Moving Loads - 10 km/hr
Multiple Moving Loads - 164 km/hr
Figure 3.43: (a) Vertical displacement; (b) axial force (c) bending moment of the
cross-beam located at mid-span of the 3D Boyne Viaduct due to a train
travelling at 10 km/hr and 164 km/hr
(a)
(b)
(c)
Bottom Chord
Top Chord

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
104
Prior to examining the dynamic amplification factors DAFU and DAFA for the three-
dimensional structure, the author must now re-calculate the first natural frequency of
the three-dimensional Boyne Viaduct using a modal analysis, as this structure has
become a lot stiffer and heavier than its two-dimensional counterpart. The extra mass
and stiffness associated with the three-dimensional bridge model is due to the addition
of cross-beams and longitudinal beams, which is not modelled in the two-dimensional
bridge model. In Figure 3.44, the author presents the first two-flexural mode shapes
and their respective bridge frequencies obtained from a modal analysis. Using
Equation (3.30) and 1
=f 3.123 Hz , the critical speed of a vehicle is computed as
504 m/s,=cr
c which equivalent to 1814 km/hr. As before, the Boyne Viaduct is
unlikely to ever experience such a high speed; hence, a more realistic range of speeds
between 10 km/hr to 300 km/hr i.e. 0 0.165,α< < are of greatest concern in the
author’s parametric study.
Figure 3.44: 3D Natural frequencies and their corresponding mode shapes
A plot of the dynamic amplification factors DAFU and DAFA for the range of speed
values between 0 1.0α< < can be seen in Figure 3.45. From inspection of Figure
3.45, it can be seen that the dynamic amplification factors are similar for the two-
dimensional and three-dimensional bridge models at speeds 0.4,α < however, as the
speed ratio increases the DAFU and DAFA for the two-dimensional model and three-
dimensional vary by as much as 10%.
(a) 1st mode shape -
13.123 Hz=f (b) 2
nd mode shape -
28.716 Hzf =

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
105
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FU
Multiple Moving Loads - 2D Boyne
Multiple Moving Loads - 3D Boyne
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FA
Multiple Moving Loads - 2D Boyne (Bot)
Multiple Moving Loads - 3D Boyne (Bot)
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FA
Multiple Moving Loads - 2D Boyne (Top)
Multiple Moving Loads - 3D Boyne (Top)
Figure 3.45: Dynamic amplification factor at mid-span of the 3D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force in the
bottom chord; (c) axial force in the top chord at a range of speeds
(b)
(a)
(c)
Maximum realistic speed of a train traversing the
Boyne Viaduct (300 km/hr)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
106
A close-up view of the DAFU obtained from Figure 3.45a can be seen in Figure 3.46,
which uses realistic vehicle speeds instead of the speed parameter; therefore,
0.165α = implies that 300 km/hr.c = Examining Figure 3.46, it can be seen that the
two-dimensional and three-dimensional results are fairly similar to each other apart
from a slight shift of results. This shift of results can be partially due to the difference
observed between the natural frequencies of the two-dimensional (see Figure 3.26)
and three-dimensional bridges (see Figure 3.44). The vehicle in the three-dimensional
model has a smaller critical speed (504 m/s) than the vehicle in the two-dimensional
model (550 m/s).
1.00
1.05
1.10
1.15
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Multiple Moving Loads - 2D Boyne
Multiple Moving Loads - 3D Boyne
Figure 3.46: Close-up of Figure 3.45a with realistic vehicle speeds
3.3.3.4 Twin-track Railway Bridge
Using the simple model with overlapping time functions, one can easily model two
trains travelling in opposite directions on a twin-track bridge. For convenience, one
widens the Boyne Viaduct railway bridge to allow space for an additional railway
track as shown in Figure 3.47.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
107
Figure 3.47: Twin-track railway bridge model
Using the same section sizes and properties of Section 3.3.3.3, the author conducts a
modal analysis of this structure in order to compute its critical speed. Figure 3.48
presents the first two-flexural mode shapes and their respective bridge frequencies
obtained from a modal analysis. Using Equation (3.30) and the first natural frequency
of the bridge1 of 2.801 Hz,f the critical speed of a vehicle is computed as
452 m/s,=cr
c or 1627 km/hr. As in the previous section, it is unlikely that such a
high speed would ever be experienced on this bridge; thus, a more realistic range of
speeds between 10 km/hr to 300 km/hr i.e. 0 0.185,α< < are of interest.
Figure 3.48: Twin-track frequencies and their corresponding mode shapes
The author only examines two railway vehicles arriving on the bridge at the same
time travelling at various speeds in opposite directions as shown in Figure 3.49. In
each example, one assumes that both trains are identical in weight and length.
Twin track
(a) 1st mode shape -
12.801 Hz=f (b) 2
nd mode shape -
25.994 Hz=f

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
108
Figure 3.49: Bridge subjected to two trains arriving at the same time (Plan View)
Figure 3.50 presents the dynamic amplification factor DAFU at mid-span of the twin-
track structure, which is subjected to two trains traversing the bridge at a range of
speeds between 0 0.5α≤ ≤ . On this occasion, the static loaded deflection of the
bridge takes into account the weight of two parked trains on the bridge; therefore, it
can be seen from Figure 3.50 that the DAFU can have a value less than 1.0 when the
trains have significantly different speeds i.e. one train has a high speed while the other
has a low speed. From inspection of Figure 3.50, it can be seen that the maximum
deflection of the bridge occurs when the trains have a relatively similar speed, which
is also observed by (Lin & Ju, 2003: p. 106).
For a more in-depth analysis of a twin-track railway bridge, one can also vary the
vehicle weight, length and arrive time; however this goes beyond the scope of this
study. Nonetheless, the author’s developed systems are not limited to single track
structures.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
109
Figure 3.50: Dynamic amplification factor DAFU at mid-span of the twin track
structure due to two trains traversing simultaneously
3.3.3.5 Boyne Viaduct subjected to Eurocodes (1991) rail traffic loads
This final section subjects the three-dimensional Boyne Viaduct to rail traffic loads
found in Eurocodes (EN 1991-2, 2003), in particular, Type 1 and Type 8 train loads.
The Type 1 train model consists of a locomotive and 12 railway coaches as shown in
Figure 3.51a, while the Type 8 train model comprises a locomotive and 20 freight
wagons as shown in Figure 3.51b. One analyses the Type 1 train model traversing the
Boyne Viaduct at 200 km/hr (the speed suggested in the Eurocodes). The Type 8 train
traverses the Boyne Viaduct at 100 km/hr (the speed suggested in the Eurocodes). In
each example, the simple model with overlapping is used.
DAFU
Maximum realistic speed of a train traversing the
twin track bridge (300 km/hr)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
110
Figure 3.51: Eurocode train models (EN 1991-2, 2003): (a) Type 1; (b) Type8
Figure 3.52 plots the influence of both train types acting on the mid-span node of the
bridge as a function of time for the simple model with overlapping. The vertical
displacement (Figure 3.53) and axial forces in the top chord (Figure 3.54) and bottom
chord (Figure 3.55) at mid-span of the Boyne Viaduct subjected to the two different
train types are shown below. For train Type 1, the maximum static deflection at mid-
span of the loaded bridge is 0.03295 m (32.95 mm), while the maximum static axial
force at mid-span of the loaded bridge are -1637 kN and 1057 kN in the top and
bottom chords of the bridge, respectively. Train Type 8 has a maximum static
deflection at mid-span of the loaded bridge of 0.04809 m (48.09 mm), while the
maximum static axial forces at mid-span of the loaded bridge are -2257 kN and 1500
kN in the top and bottom chords of the bridge, respectively.
From inspection of Figures 3.53 to 3.55, one can see that the dynamic coefficient for
the Boyne Viaduct tends to experience periodic oscillations for the Type 1 train, while
little to no response is observed for the Type 2 train, as both trains traverses the bridge
at the chosen speeds given in the Eurocodes (1991).
(a)
(b)

Chapter 3 – Wheel forces represented as time varying nodal forces and moments
111
-350
-300
-250
-200
-150
-100
-50
0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
Fo
rce
(kN
)
Figure 3.52a: Influence of train Type 1 on a mid-span node
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
Defl
ec
tio
n c
oe
ffic
ien
t
Train Type 1 travelling at 55.55 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.53a: Vertical displacement at mid-span of the Boyne Viaduct subjected
to train Type 1 traversing at 55.55 m/s (200 km/hr)
-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
Ax
ial
forc
e c
oe
ffic
ien
t
Train Type 1 travelling at 55.55 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.54a: Axial force in the top chord at mid-span of the Boyne Viaduct
subjected to train Type 1 traversing at 55.55 m/s (200 km/hr)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
Ax
ial
forc
e c
oe
ffic
ien
t
Train Type 1 travelling at 55.55 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.55a: Axial force in the bottom chord at mid-span of the Boyne Viaduct
subjected to train Type 1 traversing at 55.55 m/s (200 km/hr)
-350
-300
-250
-200
-150
-100
-50
0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Dimensionless time ct /L
Fo
rce
(k
N)
Figure 3.52b: Influence of train Type 8 on a node a mid-span
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
Train Type 8 travelling at 27.78 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.53b: Vertical displacement at mid-span of the Boyne Viaduct subjected to
train Type 8 traversing at 27.78 m/s (100 km/hr)
-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
Ax
ial
forc
e c
oe
ffic
ien
t
Train Type 8 travelling at 27.78 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.54b: Axial force in the top chord at mid-span of the Boyne Viaduct
subjected to train Type8 traversing at 27.78 m/s (100 km/hr)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
Ax
ial
forc
e c
oe
ffic
ien
t
Train Type 8 travelling at 27.78 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.55b: Axial force in the bottom chord at mid-span of the Boyne Viaduct
subjected to train Type 8 traversing at 27.78 m/s (100 km/hr)

Chapter 3 – Wheel forces represented as time varying nodal forces and moments
112
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
De
flec
tio
n c
oeff
icie
nt
Train Type 1 travelling at 63.40 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.56a: Vertical displacement at mid-span of the Boyne Viaduct subjected
to train Type 1 traversing at 63.4 m/s (228.24 km/hr)
-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
Axia
l fo
rce
co
eff
icie
nt
Train Type 1 travelling at 63.40 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.57a: Axial force in the top chord at mid-span of the Boyne Viaduct
subjected to train Type 1 traversing at 63.4 m/s (228.24 km/hr))
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5
Dimensionless time ct /L
Axia
l fo
rce
co
eff
icie
nt
Train Type 1 travelling at 63.40 m/s
Train Type 1 travelling at 1.00 m/s
Figure 3.58a: Axial force in the bottom chord at mid-span of the Boyne Viaduct
subjected to train Type 1 traversing at 55.55 m/s (200 km/hr)
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
De
flec
tio
n c
oeff
icie
nt
Train Type 8 travelling at 30.30 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.56b: Vertical displacement at mid-span of the Boyne Viaduct subjected to
train Type 8 traversing at 30.3 m/s (109.1 km/hr)
-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
Ax
ial
forc
e c
oeff
icie
nt
Train Type 8 travelling at 30.3 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.57b: Axial force in the top chord at mid-span of the Boyne Viaduct
subjected to train Type8 traversing at 30.3 m/s (109.1 km/hr)
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless time ct /L
Axia
l fo
rce
co
eff
icie
nt
Train Type 8 travelling at 30.30 m/s
Train Type 8 travelling at 1.00 m/s
Figure 3.58b: Axial force in the bottom chord at mid-span of the Boyne Viaduct
subjected to train Type8 traversing at 30.3 m/s (109.1 km/hr)

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
113
It is worth examining the Boyne Viaduct subjected to these two train models at
different speeds, in particular, the critical speed at which resonance of the bridge is
likely to occur due to repetitive vehicle loading. Examining Figure 3.51, the repetitive
distance Dw between railway carriages of train Type 1 is 20.3 m, while the repetitive
distance Dw between railway carriages of train Type 8 is 9.7 m. Using Equation
(3.46b) and assuming n = 1, the speeds of the two trains are:
( )1 3.123 20.3 63.4 m/s or 228.24 km/hr train Type 1wc f D= = × = (3.50a)
( )1 3.123 9.7 30.3 m/s or 109.08 km/hr train Type 8wc f D= = × = (3.50b)
The vertical displacement, axial force in the top chord and the axial force in the
bottom chord at mid-span of the Boyne Viaduct subjected to the two different train
types travelling at the speed computed in Equation (3.50) are shown in Figures 3.56 to
3.58, respectively. Inspecting the results in Figure 3.56 to 3.58, it can be seen that, on
this occasion, the dynamic coefficient for the Boyne Viaduct tends to undergo much
larger periodic oscillations compared with the results in Figure 3.53 to 3.55. It also
shows that the Boyne Viaduct is susceptible resonance generated by repetitive loaded
vehicles travelling at realistic speeds.
3.4 Discussion of results and Conclusion
To summarize, this chapter models a vehicle as a moving force i.e. only the
gravitational effects of the vehicle are taken into account. This model type is more
associated with large spanning bridges where the mass of the vehicle is often
substantially less than the mass of the bridge; thus, the inertia effects of the vehicle
are negligible (Fryba, 1996). In addition, if one is primarily interested in the dynamic
response of the bridge, then the moving force is a more suitable model to consider as
the time of execution is often less than that of other systems.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
114
It was discovered in the preliminary stage of this thesis that the ANSYS finite element
program had limitations, such as not being able to apply a point force between the
nodes of an element; therefore, the author conceived the idea of applying nodal forces
(simple model) or nodal forces and nodal moments (exact model) as functions of time
to all the nodes along the bridge to simulate the moving constant force.
In Sections 3.2.2.1 to 3.2.2.2, it has been shown that the simple model is comparable
to the exact model provided that a suitable number of beam elements are used to
discretize the beam because Section 3.2.2.3 highlights the limitations of the simple
model as well as the ANSYS contact element method. The simple model and ANSYS
contact element model tend to lose accuracy as the number of elements in the model is
reduced. The beam deflection of the exact model is unaffected by the reduction in the
number of beam elements. However, the bending moment is affected by the number
of elements. Applying joint equilibrium at a particular node, one found that the
summation of the two internal moments at that node was equal to the applied moment
PG1 or PG2, depending on which element the moving force was located on. Section
3.2.2.4 then reveals that the internal forces from Equation (3.6) and (3.5) for the
simple and exact models are exactly the same as ANSYS produces for a pressure
applied between two consecutive nodes. The ANSYS internal forces are noticeably
different when the point force is applied at the nodes because ANSYS tends to neglect
the pressure loads when it computes the beam’s internal forces; hence, the shear force
and bending moments are stepped. Nevertheless, by applying joint equilibrium to a
node, one can say that the ANSYS solution is numerically correct.

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
115
Next using the developed methods, the author analyses a two-dimensional Boyne
Bridge subjected to single or multiple loads traversing at a constant speed. It is
observed that for a single moving force the maximum dynamic amplification factor,
DAF, occurs when the speed ratio α is 0.5, while for multiple moving forces the
maximum DAF occurred at α = 1.0. Despite these differences, both models tend to
show similarities at lower speeds, that is, at speeds ranging between 0.15 ≤ α ≤ 0.20
when a DAF value of 1.1 or greater is observed. It is shown that the results of the
three-dimensional Boyne Bridge are similar to results of the two-dimensional model
at low to medium speeds, which is, α < 0.4, and while at higher speeds the results
tend to diverge by as much as 10%. Like the two-dimensional model, the three-
dimensional model has a minimal DAF at approximately 0.27α ≈ .
It has been shown in Section 3.2.2 and 3.3.3 that resonance of the bridge can occur if
a critical speed is reached. This critical speed can be related to: (1) the traffic speed
using Equation (3.30); and (2) the repetitive vehicle loading of the bridge using
Equation (3.46b). In this thesis, the critical speed of the three-dimensional Boyne
Viaduct is 1814 km/hr using Equation (3.30), which is an unrealistic speed, while
using Equation (3.46b) and a repetitive distance of Dw of 5 m, the three-dimensional
Boyne Viaduct could be susceptible to resonance at 56.2 km/hr.
For the twin-track structures when the two trains have significantly different speeds
i.e. one train has a high speed while the other has a low speed, the DAFU can have a
value less than 1.0. As a final assessment, the three-dimensional Boyne Viaduct is
subjected to two different Eurocode (EN 1991-2, 2003) train models, in particular,
Type 1 travelling at 200 km/hr and Type 8 travelling at 100 km/hr. At these particular

Chapter 3 - Wheel forces represented as time varying nodal forces and moments
116
speeds, one observes that the dynamic coefficient for both sets of results has a value of
1.0 or less on most occasions. However, when the speeds of both trains were changed
to the values computed in Equation (3.46), it was found that the Boyne Viaduct could
be susceptible to resonance generated by repetitive loaded vehicles travelling at
realistic speeds.
As a final note, the moving force system is not able to incorporate the inertia effects
of the vehicle, but frequently the inertia isn’t important. In addition, one can acquire
reasonable results on the dynamic behaviour of the bridge with minimum effort,
which is excellent in the early stages of the analysis.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
117
Chapter 4
Sprung mass represented by time varying stiffness
matrices
4.1 Introduction
The primary aim of this chapter is to simulate the dynamic vertical response of a
vehicle traversing rigid rails and a railway bridge. This is achieved by using the
author’s wheel-rail contact element (WRC) to model the dynamic interaction between
a sprung wheel and the rail, using a Hertzian spring. The objective in creating this
element is to model the rail and wheel irregularities. The contact elements within the
ANSYS finite element program cannot model these irregularities. The wheel-rail
contact element incorporating irregularities is discussed in Chapter 6.
Many researchers such as Cheng et al. (1999), Yau et al. (1999) and Yang and Wu
(2001) have developed their own vehicle-bridge elements, where there is an unsprung
mass for the wheel and sprung mass for the vehicle body. In these systems, the wheel
is assumed to be in direct contact with the rail at all times; hence, the wheel and rail
have the same deflection and wheel-rail separation is not possible on a rigid rail. In
the author’s model, the wheel is represented by a sprung mass; thus, there is a

Chapter 4 – Sprung mass represented by time varying stiffness matrices
118
Hertzian spring between the wheel and the rail, which is simulated by means of the
WRC elements. In this case, the wheel and beam no longer have the same deflection.
The author’s technique involves modelling each wheel as a point mass and with the
Hertzian spring perpendicular to the surface of the rail. Each WRC element consists
of three stiffness matrices to simulate the action of the wheel on the flexible rail, but
only one stiffness matrix is required to represent the action of the wheel on the rigid
rail. The entries into the stiffness matrices depend on the position of a wheel on a
particular element and the element shape functions. The WRC elements use the
compression in the Hertzian spring at each time-step to calculate the contact force that
exists between the wheel and the rail. Wheel-rail separation occurs when compression
changes to positive extension in the spring, thus all stiffness matrices related to that
particular wheel are made equal to zero (Bowe & Mullarkey, 2005).
In addition to a vertical spring element, the author also develops longitudinal and
lateral spring elements that can take into account the braking and accelerating effect
of railway carriages as well as providing lateral support to the wheels of the carriage.
The braking forces are modelled using longitudinal spring elements located between
the wheels and flexible rail so that when the brakes are applied to the wheels, the
bridge feels the horizontal effects as the train decelerates.
This chapter also exposes the limitations of the ANSYS contact elements. Firstly, the
ANSYS contact elements have friction capabilities, but this cannot be used to model
the braking or accelerating effects of a wheel. Secondly, in three-dimensional models,
one must use a solid brick element to represent the rails, because the three-

Chapter 4 – Sprung mass represented by time varying stiffness matrices
119
dimensional ANSYS contact elements require a surface area. Thirdly, the three-
dimensional ANSYS contact elements neglect the lateral support of the wheels.
However, with the adaptation of the author’s lateral spring element between the
wheels and flexible rails, the wheels can be provided with adequate lateral support.
Furthermore, with the lateral spring element, the author can also examine lateral rail
irregularities, which are conducted in Chapter 6.
It should also be noted that any vehicle consisting of sprung masses must undergo a
static analysis prior to the transient analysis to ensure that the vehicle has settled
under its own weight at time t = 0 sec. Omitting this static analysis will cause sprung
masses in the model to experience free vibration as the transient analysis is initiated.
Following the validation of the WRC element by means of the ANSYS contact
element, the author studies a single sprung wheel as well as multiple railway carriages
traversing the Boyne Viaduct and compares the results of the bridge with the results
of the bridge for the moving loads examined in Chapter 3.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
120
4.2 Development of the Wheel-Rail Contact Elements
4.2.1 Vertical Spring Element using time varying matrices
The author’s wheel-rail contact (WRC) element involves modelling a wheel as a mass
and a Hertzian spring with one node at the centre of the wheel and the other node on
the rail as illustrated in Figure 4.1. It is assumed that the Hertzian spring is always
perpendicular to the surface. Figure 4.1 shows local node 1 of the spring is in contact
with the rail and local node 2 of the spring is attached to the point mass.
Figure 4.1: Wheel modelled as a sprung mass
In Figure 4.2, the reader can see the sprung mass between nodes i-1 to i, as well as the
free-body diagram for the WRC element and one beam finite element representing
part of the rail. In ANSYS, the user can create a stiffness matrix for any pair of nodes
using the 12x12 MATRIX27 element. The author is obliged to use this facility to
input three additional stiffness matrices to simulate the Herztian spring. To simulate
the spring, three additional stiffness matrices are created between local node 1 and
local node 2 of the beam, between local node 1 of the beam and local node 2 of the
spring and finally between local node 2 of the beam and local node 2 of the spring.
2
1
⇒ Sprung mass
Wheel Centre
Rail
Wheel Centre
(a)
L
2x 3x 1ix − ix 1ix +1 0x =
2 31 x
y
x ct=
i 1i +1i −

Chapter 4 – Sprung mass represented by time varying stiffness matrices
121
Figure 4.2: (a) Sprung mass located between node i-1 to node i (b) free-body
diagram of the wheel-rails contact element
Figure 4.2 indicates the beam element coordinate system, where χ is positive along
the beam element, y is positive upward and z is positive outwards. The x-coordinate
is for the entire beam with the origin at the left hand support. The origin of the χ
coordinate system is at local node 1 of the beam. For two-dimensional problems, the
deflection in the x, y plane and rotation about z-axis are denoted as u, v and z
θ ,
respectively, while the subscripts L denote Hertzian spring. The beam element
coordinates will be used for this development. Recalling Equation (3.7), the
relationship between x and χ is as follows:
1ix xχ −= + (4.0)
The interaction between node 1 of the spring and the point of the beam element it
contacts is in accordance with Newton’s third law. The beam acts with a vertical force
of 1LyF on the spring; the spring acts with an equal and opposite force of 1Ly
F− on the
beam. From the free-body in Figure 4.2, the nodal forces in the wheel-rail contact
element can be expressed in the beam element coordinate system as follows:
(b)
ULx2
ULy2
1
1
1
2
2
1
1st stiffness matrix
2nd
stiffness matrix 3rd
stiffness matrix Hertzian
Spring
0
Mw
kH
y
x
z
1u 2u
2v1v
χ
i1-i2
ˆzθ
1ˆzθ
x ct=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
122
1 1
1 12 11 2 12
2 22 21 2 22
2 2
Lx Lx
Ly LyL L
L L
Lx LxL L
Ly Ly
U F
U F
U F
U F
=
K KK U =
K K (4.1)
where only the x and y coordinates of the spring are taken into account for the axial
element; therefore 2LijK (i, j =1, 2) denotes a 2x2 stiffness matrix, LxiU , LyiU (i, j =1,
2) are the nodal displacement vector components and LxiF , LyiF (i, j =1, 2) are the
nodal force vector components of the Hertzian spring (also referred to as a link).
2 11LK is a symmetrical matrix, 2 22L
K is equal to 2 11LK , 2 12L
K is equal to 2 21LK , the
latter being equal to minus one times 2 11LK . From Figure 4.2 and Figure B.16a, one
can see that the Hertzian spring makes an angle o0α = (rotation about the y-axis) and
o90β = (rotation about the z-axis); therefore using Equation (B.97) the stiffness
matrix for the Hertzian spring is as follows (the third row and column that relate to the
z-axis of the axial element are omitted for this two-dimensional development):
2 11
0 0
0 1L Hk
=
K , is non-linear Hertzian spring stiffnessHk (4.2)
The vertical displacement at any point along the beam can be calculated as follows:
( ) ( ) ( ) ( ) ( )1 1 1 1 2 2 2 2ˆ ˆ
B z zv v N G v N Gχ χ θ χ χ θ χ= + + + (4.3)
where ( )1N χ , ( )1G χ , ( )2N χ and ( )2G χ are shape functions that are defined by
Equation (B.8) and plotted in Figure B.3 in Appendix B. The beam element
coordinate is defined by the symbol χ .

Chapter 4 – Sprung mass represented by time varying stiffness matrices
123
The length of the beam element is denoted by l. Since local node 1 of the spring is
located at position x ct= in the beam coordinate system, then its location in the beam
element coordinate system is equal to 1 1i ix x ct xχ − −= − = − ; hence:
( ) ( )1 1Ly B B iU v v ct xχ −= = − (4.4)
Equation (4.4) is only valid when the sprung mass is on the beam. Since it is assumed
that to the left of the left hand support and to the right of the right hand support are
rigid rails; hence, 1LyU becomes zero when the sprung mass is not on the beam. The
substitution of Equation (4.4) into Equation (4.1) gives the following:
( )2 1
1 12 11 2 12
2 22 21 2 22
2 2
Lx Lx
B i LyL L
Lx LxL L
Ly Ly
U F
v ct x F
U F
U F
−
−
=
K K
K K (4.5)
Since it is assumed that the Hertzian spring element remains perpendicular to the
surface at all times, the horizontal displacement on both nodes are equal
( )1 2 .Lx LxU U= In order to represent the vertical spring, the author returns to the exact
model for the moving load developed in Chapter 3. One rewrites Equations (3.16) and
(3.5) in Chapter 3 as:
( )( )( )( )
( )( )( )( )
1 1
2 21 1
2 2
2 20 0
2 2
l l
N N
G Gv vEI d m d
N N t
G G
χ χ
χ χχ χ
χ χχ
χ χ
′′ ′′ ∂ ∂
+ ′′ ∂ ∂
′′
∫ ∫
1
1
2
2
ˆ
ˆ
ˆ
ˆ
Q
M
Q
M
=
( )( )( )( )
( )
1
1
20
2
,
l
N
Gp x t d
N
G
χ
χχ
χ
χ
+
∫ (4.6a)
where

Chapter 4 – Sprung mass represented by time varying stiffness matrices
124
( )( )( )( )
( )
1
1
20
2
,
l
N
Gp x t d
N
G
χ
χχ
χ
χ
∫
( )( )( )( )
( )( )
1
1
1
20
2
l
i
N
Gct x Pd
N
G
χ
χδ χ χ
χ
χ
−
= − −
∫
( )( )( )( )
( )( )( )( )
1 1 1 1
1 1 1 1
1
2 1 2 1
2 1 2 1
i i
i i
Ly
i i
i i
N ct x N ct x
G ct x G ct xP F
N ct x N ct x
G ct x G ct x
− −
− −
− −
− −
− −
− − = =−
− − − −
(4.6b)
Equation (4.6b) is only valid when time t lies between 1ix
c
− and .ix
c The force
imparted to the beam by the spring is equal to 1LyF− located at position 1ict xχ −= − .
Expanding Equation (4.5), with the aid of Equation (4.2), for 1LyF then gives:
[ ] [ ] ( ) [ ] [ ]1 2 11 2 2 11 1 2 12 2 2 12 221 22 12 22Ly L Lx L B i L Lx L LyF U v ct x U U−= ⋅ + ⋅ − + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lyk v ct x k U−= ⋅ − + − ⋅
[ ]( )1
2
B i
H H
Ly
v ct xk k
U
−− = −
(4.7a)
By bringing the right hand side of Equation (4.6b) over to the left hand side, 1LyF
becomes positive and Equation (4.7a) can be rewritten as follows:
( )( )( )( )
( )( )( )( )
( )( )( )( )
[ ]( )
1 1 1 1 1 1
11 1 1 1 1 1
1 1
22 1 2 1 2 1
2 1 2 1 2 1
i i i
B ii i i
Ly Ly H H
Lyi i i
i i i
N ct x N ct x N ct x
v ct xG ct x G ct x G ct xF F k k
UN ct x N ct x N ct x
G ct x G ct x G ct x
− − −
−− − −
− − −
− − −
− − −
− − − − = = −
− − − − − −
(4.7b)
In Equation (4.7b), ( )1B iv ct x −− is replaced by the right hand side of Equation (4.3),
resulting in the following equation:
[ ]
1 1
1 1 1 1 1 1 2 2 2 2
1
2 2 2
2 2
ˆ ˆz z
Ly H H
Ly
N N
G G v N G v N GF k k
N N U
G G
θ θ
+ + +
= −
(4.8)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
125
For convenience, in Equation (4.8) and in future equations ( )1 1iN ct x −− is replaced
by 1N , ( )1 1iG ct x −− is replaced by 1G etc. Equation (4.8) can also be rewritten as:
[ ]
1
1 1
1
1 1 1 1 2 2
21
2 2
22 2
2
ˆ0
0 0 0 0 1ˆ
z
Ly H H
z
Ly
vN N
G G N G N GvF k k
N N
G GU
θ
θ
= −
(4.9)
Expanding Equation (4.9) gives
[ ]
1
1 1 1 1 1 1 2 1 2 1
1
1 1 1 1 1 1 2 1 2 1
21
2 2 1 2 1 2 2 2 2 2
22 2 1 2 1 2 2 2 2 2
2
ˆ
ˆ
z
Ly H
z
Ly
vN N N N G N N N G N
G G N G G G N G G GvF k
N N N N G N N N G N
G G N G G G N G G GU
θ
θ
−
− = − −
(4.10)
Next, the author separates the right hand side of Equation (4.10) into three stiffness
matrices. The first matrix represents the stiffness matrix for local nodes 1 and 2 of the
beam element, the second matrix represents the stiffness matrix for local node 1 of the
beam and local node 2 of the spring element and the third matrix represents the
stiffness matrix for local node 2 of the beam and local node 2 of the spring element.
To facilitate the addition of the longitudinal spring element, which is developed in
Section 4.2.2, the author adds extra zero rows and zero columns to Equation (4.11).
[ ]
1
11 1 1 1 1 1 2 1 2
1 1 1 1 1 1 2 1 2 1
1
2
2 2 1 2 1 2 2 2 2 2
2 2 1 2 1 2 2 2 2 2
0 0 0 0 0 0 0
0 0
ˆ0 0
0 0 0 0 0 0 0
0 0
ˆ0 0
z
Ly H
z
u
vN N N N G N N N G
G G N G G G N G GF k
u
N N N N G N N N G v
G G N G G G N G G
θ
θ
=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
126
[ ] [ ]
1 2
1 21 2
1 21 2
2 2
2 2
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
z zH H
Lx Lx
Ly Ly
u u
v vN N
G Gk k
U U
U U
θ θ
+ − + −
− −
(4.11)
Next, one examines the equation of motion of the point mass, which is attached to
local node 2 of the spring element. This point mass has six degrees of freedom;
however, only the longitudinal, vertical and lateral motions are taken into account at
this time; therefore the equation of motion can be written as follows:
2
2 2
2
0 0 0
0 0
0 0 0
w Lx
w Ly Ly
w Lz
U
U F
U
= −
M
M
M
&&
&&
&&
(4.12a)
Hence, the force imparted to the point mass, representing the wheel, by the spring is
equal to 2LyF− . By bringing the right hand side of Equation (4.12a) to the left hand
side, 2LyF becomes positive and is derived by expanding Equation (4.5) as follows:
[ ] [ ] ( ) [ ] [ ]2 2 21 2 2 21 1 2 22 2 2 22 221 22 12 22Ly L Lx L B i L Lx L LyF U v ct x U U−= ⋅ + ⋅ − + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lyk v ct x k U−= − ⋅ − + ⋅
[ ]( )1
2
B i
H H
Ly
v ct xk k
U
−− = −
(4.12b)
Substituting Equation (4.3) into (4.12b) gives:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
127
[ ]
1
1
1 1 2 2
22
2
2
ˆ0
0 0 0 0 1ˆ
z
Ly H H
z
Ly
v
N G N GvF k k
U
θ
θ
= − =
[ ][ ] [ ]
1
1
2 1 1 2 2 2
2
2
0 0
0 0
ˆ0 0
0 0
ˆ1 1
z
Ly H H Ly
z
v
F k N G N G k Uv
θ
θ
= − +
− −
=
[ ] [ ]
1 2
1 2
1 2
2 2
1 1 2 22 2
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
z zH H
Lx Lx
Ly Ly
u u
v v
k kU U
N G N GU U
θ θ
= − + −
− −
[ ]
1
1
1
2
2
0 0 0 0 0 0
0 0 0 0 0 0
ˆ0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 1 0
0 0 0 0 0 0
zH
Lx
Ly
u
v
kU
U
θ
+
−
(4.12c)
The right hand side of Equation (4.12c) contains three matrix terms, and the third term
by itself represents the effects of the rigid rails. For programming purposes Equations
(4.11) and (4.12c) are combined, resulting in symmetrical stiffness matrices for the
Hertzian spring, updated at each time-step.
The wheel-rail contact force in the spring is evaluated by multiplying the extension by
the spring stiffness. The Hertzian extension is given by Equation (B.109) where α is
equal to 0o
and β is equal to 90o
for the vertical spring and Equation (4.4) has also
been incorporated, giving:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
128
[ ] [ ]1 2
1 2
extension cos cos sin cos cos sinLx Lx
Ly Ly
U U
U Uβ α β β α β
= − +
(4.13a)
[ ]( )
1
1
2
2
extension 0 1 0 1
Lx
B i
Lx
Ly
U
v ct x
U
U
−
−
= −
(4.13b)
In the model, the extension in the spring is calculated at each time-step to determine if
the wheel is in contact with the rail. A negative extension (compression) indicates that
contact exists between the wheel and the rail, while a positive extension (tension)
means that there is no contact; thus all stiffness matrices related to that particular
wheel are set equal to zero when the extension is positive.
4.2.2 Longitudinal Spring Element using time varying matrices
Using a similar methodology to that of the previous section, the author now develops
a longitudinal spring element between wheel centre and the rail surface to simulate
both the accelerating and braking effects of the wheel. This spring element is
tangential to the vertical spring element and is parallel with the beam surface as
shown in Figure 4.3. This particular beam element is also between node i-1 to node i,
with the entire beam shown in Figure 4.2a.
Figure 4.3: Free-body diagram of the longitudinal spring element
1
2
2u
2v
i
1
1
0
y
x
z
1u
1v
χ
1-i
ULx2
ULy2
2
1
Longitudinal
Spring Mw
kH
2ˆz
θ
1ˆz
θ
x ct=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
129
Recalling Equation (4.1), the nodal forces in the longitudinal spring element can be
expressed in the beam element coordinate system as follows:
1 1
1 12 11 2 12
2 22 21 2 22
2 2
Lx Lx
Ly LyL L
L L
Lx LxL L
Ly Ly
U F
U F
U F
U F
=
K KK U =
K K (4.14)
where 2LijK (i, j =1, 2) denotes a 2x2 stiffness matrix. From Figure B.16b, the
longitudinal spring makes an angle o0α = (rotation about the y-axis) and o0β =
(rotation about the z-axis), therefore using Equation (B.98) the stiffness matrix for the
longitudinal spring becomes (again the third row and column that relate to the z-axis
of the axial element are omitted):
2 11
1 0
0 0L H
k
=
K (4.15)
The longitudinal displacement at any point along the beam is calculated as follows:
( ) ( ) ( )1 1 2 2Bu u H u Hχ χ χ= + (4.16)
where ( )1H χ and ( )2H χ are shape functions that are defined by Equation (B.47)
and plotted in Figure B.7 in Appendix B. The beam element coordinate is again
defined by the symbol χ . Since local node 1 of the longitudinal spring is located at
position 1ict xχ −= − on the beam, one can state the following:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
130
( )1 1Lx B iU u ct x −= − (4.17)
Equation (4.17) is only valid when the sprung mass is on the beam; hence, when the
sprung mass is on rigid rails and not on the beam, 1LxU becomes zero. The
substitution of Equation (4.17) into Equation (4.14) gives the following:
( ) 11
122 11 2 12
222 21 2 22
22
LxB i
LyLyL L
LxLxL L
LyLy
Fu ct x
FU
FU
FU
−−
=
K K
K K (4.18)
Since it is assumed that the longitudinal spring remains parallel to the surface at all
times, the vertical displacements on both nodes are equal. On this occasion, to
represent the longitudinal motion of the beam, one requires Equation (B.53) and (3.9), giving:
( )( )
( )( )
( )( )
( )2
1 1 11
2
2 2 20 0 02
ˆ,
ˆ
l l lH H HPu uEA d m d p x t d
H H Hx t P
χ χ χχ χ χ
χ χ χ
′ ∂ ∂ + = +
′ ∂ ∂ ∫ ∫ ∫ (4.19a)
where
( )( )
( )1
20
,
l Hp x t d
H
χχ
χ
∫
( )( )
( )( )1
1
20
l
i
Hct x Pd
H
χδ χ χ
χ −
= − − ∫
( )( )
( )( )
1 1 1 1
1
2 1 2 1
i i
Lx
i i
H ct x H ct xP F
H ct x H ct x
− −
− −
− − = =−
− −
(4.19b)
Equation (4.19) is only valid when time t lies between 1ix
c
− and .ix
c The force
imparted to the beam by the longitudinal spring is equal to 1LxF− located at
position 1ict xχ −= − . Expanding Equation (4.18), using Equation (4.15), for 1Lx
F gives:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
131
[ ] ( ) [ ] [ ] [ ]1 2 11 1 2 11 2 2 12 2 2 12 211 12 11 12Lx L B i L Ly L Lx L LyF u ct x U U U−= ⋅ − + ⋅ + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lxk u ct x k U−= ⋅ − + − ⋅
[ ]( )1
2
B i
H H
Lx
u ct xk k
U
− − = −
(4.20a)
By bringing the right hand side of Equation (4.19b) over to the left hand side, 1LxF
becomes positive and Equation (4.20a) can be rewritten as follows:
( )( )
( )( )
( )( )
[ ]( )1 1 1 1 1 1 1
1 1
2 1 2 1 2 1 2
i i i B i
Lx Lx H H
i i i Lx
H ct x H ct x H ct x u ct xF F k k
H ct x H ct x H ct x U
− − − −
− − −
− − − − = = −
− − − (4.20b)
In Equation (4.20b), ( )1B iu ct x −− can be replaced by the right hand side of Equation
(4.16), resulting in the following equation:
[ ] 1 1 2 21 1
1
22 2
Lx H H
Lx
u H u HH HF k k
UH H
+ = −
(4.21)
For convenience again, in Equation (4.21) ( )1 1iH ct x −− has been replaced by 1H and
( )2 1iH ct x −− has been replaced by 2H . Equation (4.21) can also be rewritten as:
[ ]1
1 1 1 2
1 2
2 2
2
0
0 0 1Lx H H
Lx
uH H H H
F k k uH H
U
= −
(4.22)
Expanding Equation (4.22) gives
[ ]1
1 1 1 1 2 1
1 2
2 2 1 2 2 2
2
Lx H
Lx
uH H H H H H
F k uH H H H H H
U
−
= −
(4.23)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
132
As before, the author separates the right hand side of Equation (4.23) into three
stiffness matrices. The first matrix represents the stiffness matrix for local nodes 1 and
2 of the beam element, the second matrix represents the stiffness matrix for local node
1 of the beam and local node 2 of the longitudinal spring element and the third matrix
represents the stiffness matrix for local node 2 of the beam and local node 2 of the
longitudinal spring element.
[ ]
11 1 1 1 2
1
1
1
22 2 1 2 2
2
2
0 0 0 0
0 0 0 0 0 0 0
ˆ0 0 0 0 0 0 0
0 0 0 0
0 0 0 0 0 0 0
ˆ0 0 0 0 0 0 0
z
Lx H
z
uH H H H H
v
F kuH H H H H
v
θ
θ
=
[ ] [ ]
1 21 1
1 2
1 2
2 2
2 2
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
z zH H
Lx Lx
Ly Ly
u uH H
v v
k kU U
U U
θ θ
+ − + −
− −
(4.24)
Similar to Section 4.2.1, one examines the equation of motion of the point mass,
which is attached to local node 2 of the longitudinal spring element and can be written
as follows:
2 2
2
2
0 0
0 0 0
0 0 0
w Lx Lx
w Ly
w Lz
U F
U
U
− =
M
M
M
&&
&&
&&
(4.25a)
The force imparted to the point mass by the longitudinal spring is equal to 2LxF− . By
bringing the right hand side of Equation (4.25a) to the left hand side, 2LxF becomes
positive and is derived by expanding Equation (4.18) as follows:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
133
[ ] ( ) [ ] [ ] [ ]2 2 21 1 2 21 2 2 22 2 2 22 211 12 11 12Lx L B i L Ly L Lx L LyF u ct x U U U−= ⋅ − + ⋅ + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lxk u ct x k U−= − ⋅ − + ⋅
[ ]( )1
2
B i
H H
Lx
u ct xk k
U
− − = −
(4.25b)
Substituting Equation (4.16) into (4.25b) gives:
[ ]1
1 2
2 2
2
0
0 0 1Lx H H
Lx
uH H
F k k u
U
= − =
[ ][ ] [ ]1
2 1 2 2
2
0 0
0 0
0 0
1 1
0 0
Lx H H Lx
uF k H H k U
u
= − + =
− −
[ ] [ ]
1 2
1 2
1 2
1 12 2
2 2
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
z zH H
Lx Lx
Ly Ly
u u
v v
k kH HU U
U U
θ θ
= − + −
− −
[ ]
1
1
1
2
2
0 0 0 0 0 0
0 0 0 0 0 0
ˆ0 0 0 0 0 0
0 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
zH
Lx
Ly
u
v
kU
U
θ
+
−
(4.25c)
For programming purposes Equations (4.24) and (4.25c) are combined, resulting in
symmetrical stiffness matrices for the longitudinal spring element, updated at each
time-step.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
134
Similar to Section 4.2.1, the braking force or horizontal axial force in the spring
element is evaluated using the extension in the spring element. On this occasion, one
is only concerned with the horizontal nodal displacements; thus α and β are both
equal to 0o. The braking force felt by the wheel is given by Equation (B.109), which
incorporates Equation (4.17) as follows:
[ ] [ ]1 2
1 2
extension cos cos sin cos cos sinLx Lx
Ly Ly
U U
U Uβ α β β α β
= − +
(4.26a)
[ ]
( )1
1
2
2
extension 1 0 1 0
B i
Lx
Lx
Ly
u ct x
U
U
U
−−
= −
(4.26b)
According to Newton’s second law of motion, as the train accelerates, additional
horizontal forces must be applied to the train using Equation (4.27).
, , w w b b v v
F M a F M a F M a= = = (4.27)
where , , w b c
F F F are additional forces and , , w b v
M M M are the mass of the wheels,
bogies and vehicle body of the train, respectively, and a is the acceleration. In order
for the wheels of the train to experience these additional horizontal forces, horizontal
suspension springs are then required between the bogies and wheels and between the
bogies and vehicle body.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
135
4.2.3 Lateral Spring Element using time varying matrices
This section develops the lateral spring element that provides lateral support to the
wheels of the vehicle in three-dimensional analyses. In addition, these elements allow
the author to examine lateral loading from the wind. In Figure 4.4a, the author shows
a free-body diagram for the lateral spring element and one beam element (between
node i-1 to node i of the beam shown in Figure 4.2a) representing part of the rail. As
before, to simulate the lateral spring one uses additional stiffness matrices between
local node 1 and local node 2 of the beam, between local node 1 of the beam and local
node 2 of the spring and finally between local node 2 of the beam and local node 2 of
the spring. In Figure 4.4a the coordinate system is such that χ positive along the
beam element, y positive upward and z positive outwards. The origin of the coordinate
system is at local node 1 of the beam. The deflection in the x, y and z plane and
rotation about the y and z plane are denoted as u, v, w, y
θ and z
θ , respectively.
Figure 4.4a: Free-body diagram of the lateral spring element (x-y plane)
Figure 4.4b shows the lateral spring element in the x-z plane. The development of the
lateral spring in this plane is made easier because this diagram is very similar to
Figure 4.2a. The main difference is a change of direction of the nodal moments. The
y
x
z
1
1
2
1
2
1
2w 2v
2u
1w2v
2u
2ˆ
yθ
1ˆ
yθ 1ˆz
θ2
ˆz
θ
2LzU
2LxU
χ
Mw i i -1
x ct=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
136
updated coordinate system now has χ positive along the beam element, y positive
inwards and z positive upwards; hence, this lateral spring can also be represented as a
two-dimensional problem such that the deflection in the x, z plane and rotation about
y-axis are denoted as u, w and y
θ , respectively.
Figure 4.4b: Free-body diagram of the lateral spring element (x-z plane)
From the free-body in Figure 4.4b, the nodal forces in the lateral spring element can
be expressed in the beam element coordinate system as follows:
1 1
2 11 2 12 1 1
2 21 2 22 2 2
2 2
Lx Lx
L L Lz Lz
L L
L L Lx Lx
Lz Lz
U F
U F
U F
U F
=
K KK U =
K K (4.28)
where Lij
K (i, j =1, 2) denotes a 2x2 stiffness matrix. From Figure 4.4a and Figure
B.16b, one can see that the Hertzian spring makes an angle o270α = (rotation about
the y-axis) and o0β = (rotation about the z-axis); therefore using Equation (B.99) the
stiffness matrix for the lateral spring becomes (the second row and column that relate
to the y-axis of the axial element are omitted):
ULx2
ULz2
1
1
1
2
1
Lateral
Spring
0
Mw
kH
z
x
y
1u 2u
2w1w
χ
2
1st stiffness matrix
2nd
stiffness matrix 3rd
stiffness matrix
i -1 i
2ˆ
yθ1ˆ
yθ
x ct=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
137
2 11
0 0
0 1L H
k
=
K (4.29)
The lateral displacement at any point along the beam can be calculated as follows:
( ) ( ) ( ) ( ) ( )1 1 1 1 2 2 2 2ˆ ˆ
B y yw w N G w N Gχ χ θ χ χ θ χ= − + − (4.30)
where ( )1N χ , ( )1G χ , ( )2N χ and ( )2G χ are shape functions that are defined by
Equation (B.8) and plotted in Figure B.3 in Appendix B. It should be noted that
Equation (4.30) corresponds to Equation (B.28), with its negative rotational shape
functions. As before, the beam element coordinate is defined by the symbol χ .
The length of the beam element is denoted by l and the distance travelled along the
element is given by 1ict xχ −= − , travelling from left to right. Since local node 1 of the
lateral spring is located at position x ct= on the beam, one can state the following:
( ) ( )1 1Lz B B iU w w ct xχ −= = − (4.31)
Equation (4.31) is only valid when the point mass, representing the wheel, is on the
beam. When the wheel is not on the beam, 1LzU becomes zero. The substitution of
Equation (4.31) into Equation (4.28) gives the following:
( )2 1
2 11 2 12 1 1
2 21 2 22 2 2
2 2
Lx Lx
L L B i Lz
L L Lx Lx
Lz Lz
U F
w ct x F
U F
U F
−
−
=
K K
K K (4.32)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
138
Since it is assumed that the lateral spring element remains parallel to the z-axis at all
times, the horizontal displacement on both nodes are equal ( )1 2 .Lx LxU U= In order to
represent the lateral spring, the author rewrites Equation (B.34) in Appendix B, with
the right-hand side fully evaluated in Equation (B.37) as follows:
( )( )( )( )
( )( )( )( )
1 1
2 21 1
2 2
2 20 0
2 2
l l
N N
G Gw wEI d m d
N N t
G G
χ χ
χ χχ χ
χ χχ
χ χ
′′ ′′− −∂ ∂
+ ′′ ∂ ∂
′′− −
∫ ∫
1
1
2
2
ˆ
ˆ
ˆ
ˆ
Q
M
Q
M
=
( )( )( )( )
( )
1
1
20
2
,l
N
Gp x t d
N
G
χ
χχ
χ
χ
− + −
∫
(4.33a)
where, with the aid of Equation (3.16) is
( )( )( )( )
( )
1
1
20
2
,l
N
Gp x t d
N
G
χ
χχ
χ
χ
− −
∫
( )( )( )( )
( )
1
1
20
2
l
N
Gx ct Pd
N
G
χ
χδ χ
χ
χ
− = −
−
∫
( )( )( )( )
( )( )( )( )
1 1 1 1
1 1 1 1
1
2 1 2 1
2 1 2 1
i i
i i
Lz
i i
i i
N ct x N ct x
G ct x G ct xP F
N ct x N ct x
G ct x G ct x
− −
− −
− −
− −
− − − − − −
= =− − −
− − − −
(4.33b)
Equation (4.33b) is only valid when time t lies between 1ix
c
− and .ix
c The force
imparted to the beam by the lateral spring element is equal to 1LzF− located at
position 1ict xχ −= − . Expanding Equation (4.32), with the aid of Equation (4.29), for
1LzF then gives:
[ ] [ ] ( ) [ ] [ ]1 2 11 2 2 11 1 2 12 2 2 12 221 22 12 22Lz L Lx L B i L Lx L LzF U w ct x U U−= ⋅ + ⋅ − + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lzk w ct x k U−= ⋅ − + − ⋅
[ ]( )1
2
B i
H H
Lz
w ct xk k
U
−− = −
(4.34a)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
139
By bringing the right hand side of Equation (4.34a) over to the left hand side, 1LzF
becomes positive and Equation (4.34a) can be rewritten as follows:
( )( )( )( )
( )( )( )( )
( )( )( )( )
[ ]( )
1 1 1 1 1 1
1 1 1 1 1 1 1
1 1
2 1 2 1 2 1 2
2 1 2 1 2 1
i i i
i i i B i
Lz Lz H H
i i i Lz
i i i
N ct x N ct x N ct x
G ct x G ct x G ct x w ct xF F k k
N ct x N ct x N ct x U
G ct x G ct x G ct x
− − −
− − − −
− − −
− − −
− − −
− − − − − − − = = −
− − − − − − − − −
(4.34b)
In Equation (4.34b), ( )1B iw ct x −− is replaced by the right hand side of Equation
(4.30), resulting in the following equation:
[ ]
1 1
1 1 1 1 1 1 2 2 2 21
2 2 2
2 2
ˆ ˆy y
Lz H H
Lz
N N
G G w N G w N GF k k
N N U
G G
θ θ
− − − + −
= −
− −
(4.35)
As before, in Equation (4.35) ( )1 1iN ct x −− has been replaced by 1N , ( )1 1iG ct x −− has
been replaced by 1G etc. Equation (4.35) can also be rewritten as:
[ ]
1
1 1
1
1 1 1 1 2 2
1 2
2 2
22 2
2
ˆ0
0 0 0 0 1ˆ
y
Lz H H
y
Lz
wN N
G G N G N GF k k w
N N
G GU
θ
θ
− − − −
= −
− −
(4.36)
Expanding Equation (4.36) gives
[ ]
1
1 1 1 1 1 1 2 1 2 1
1
1 1 1 1 1 1 2 1 2 1
1 2
2 2 1 2 1 2 2 2 2 2
22 2 1 2 1 2 2 2 2 2
2
ˆ
ˆ
y
Ly H
y
Lz
wN N N N G N N N G N
G G N G G G N G G GF k w
N N N N G N N N G N
G G N G G G N G G GU
θ
θ
− − −
− − − = − − − − − −
(4.37)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
140
The right hand side of Equation (4.37) is developed further, giving rise to the
following equation, which contain the three stiffness matrices used by the lateral
elements:
[ ]
1
11 1 1 1 1 1 2 1 2
11 1 1 1 1 1 2 1 2
1
2
22 2 1 2 1 2 2 2 2
2 2 1 2 1 2 2 2 2 2
0 0 0 0 0 0 0
0 0
ˆ0 0
0 0 0 0 0 0 0
0 0
ˆ0 0
y
Lz H
y
u
wN N N N G N N N G
G G N G G G N G GF k
w
vN N N N G N N N G
G G N G G G N G G
θ
θ
− − − − −
= − −
− − −
[ ] [ ]
1 2
1 21 2
1 21 2
2 2
2 2
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
y yH H
Lx Lx
Lz Lz
u u
w wN N
G Gk k
U U
U U
θ θ
− −
+ − + − − −
(4.38)
There are three matrix terms on the right hand side of Equation (4.38). The first term
represents the stiffness matrix along the beam element (between local node 1 and
local node 2 of the beam), the second term represents the stiffness matrix for local
node 1 of the beam and local node 2 of the lateral spring element and the third term
represents the stiffness matrix for local node 2 of the beam and local node 2 of the
lateral spring element.
Next, the equation of motion of the point mass is examined, which is attached to local
node 2 of the lateral spring element. The point mass has six degrees of freedom;
however, only the longitudinal, vertical and lateral motions are taken into account at
this time; therefore the equation of motion can be written as follows:

Chapter 4 – Sprung mass represented by time varying stiffness matrices
141
2
2
2 2
0 0 0
0 0 0
0 0
w Lx
w Ly
w Lz Lz
U
U
U F
= −
M
M
M
&&
&&
&&
(4.39a)
Hence, the force imparted to the point mass, representing the wheel, by the spring is
equal to 2LzF− . By bringing the right hand side of Equation (4.39a) to the left hand
side, 2LzF then becomes positive and is derived by expanding Equation (4.32) as follows:
[ ] [ ] ( ) [ ] [ ]2 2 21 2 2 21 1 2 22 2 2 22 221 22 12 22Lz L Lx L B i L Lx L LzF U w ct x U U−= ⋅ + ⋅ − + ⋅ + ⋅K K K K
[ ] ( ) [ ]1 2H B i H Lzk w ct x k U−= − ⋅ − + ⋅
[ ]( )1
2
B i
H H
Lz
w ct xk k
U
−− = −
(4.39b)
Substituting Equation (4.31) into (4.39b) gives:
[ ]
1
1
1 1 2 2
2 2
2
2
ˆ0
0 0 0 0 1ˆ
y
Lz H H
y
Lz
w
N G N GF k k w
U
θ
θ
− − = − =
[ ][ ] [ ]
1
1
2 1 1 2 2 2
2
2
0 0
0 0
ˆ0 0
0 0
ˆ
1 1
y
Lz H H Lz
y
w
F k N G N G k Uw
θ
θ
= − − − + = − −
[ ] [ ]
1 2
1 2
1 2
2 2
1 1 2 22 2
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
ˆ ˆ0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
y yH H
Lx Lx
Lz Lz
u u
w w
k kU U
N G N GU U
θ θ
= − + − − −
− −

Chapter 4 – Sprung mass represented by time varying stiffness matrices
142
[ ]
1
1
1
2
2
0 0 0 0 0 0
0 0 0 0 0 0
ˆ0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 1
yH
Lx
Lz
u
w
kU
U
θ
+ −
(4.39c)
The right hand side of Equation (4.39c) contains three matrix terms, and the third term
by itself represents the effects of the rigid rails. For programming purposes Equations
(4.38) and (4.39c) are combined, resulting in symmetrical stiffness matrices for the
lateral spring element, updated at each time-step.
The wheel-rail contact force in the spring is evaluated by multiplying the extension by
the spring stiffness. The Hertzian extension is given by Equation (B.109) where α is
equal to 270o
and β is equal to 0o
for the lateral spring as well as incorporating
Equation (4.4), giving:
[ ] 1
1
extension cos cos cos sinLx
Lz
U
Uβ α β α
= − −
[ ] 2
2
cos cos cos sinLx
Lz
U
Uβ α β α
+ −
(4.40a)
[ ]( )
1
1
2
2
extension 0 1 0 1
Lx
B i
Lx
Lz
U
w ct x
U
U
−
−
= −
(4.40b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
143
In Figure 4.5, the author presents the computational scheme for the wheel-rail contact
element, which includes the vertical, longitudinal and lateral spring elements
developed in Sections 4.2.1 to 4.2.3.
Figure 4.5: Computational scheme of the wheel-rail contact element

Chapter 4 – Sprung mass represented by time varying stiffness matrices
144
4.2.4 Multiple wheels using the WRC element
Until now, one has only considered a single sprung wheel traversing the beam using
the wheel-rail contact element. With the aid of Equation (3.38) and substituting
Equation (4.0) into (4.6), the equation of motion for a single beam element between
nodes i-1 to i, subjected to all the wheels of the train can be written as follows:
( )( )( )( )
( )( )( )( )
1 1
2 21 1
2 2
2 20 0
2 2
l l
N N
G Gv vEI d m d
N N t
G G
χ χ
χ χχ χ
χ χχ
χ χ
′′ ′′ ∂ ∂
+ ′′ ∂ ∂
′′
∫ ∫
1
1
2
2
ˆ
ˆ
ˆ
ˆ
Q
M
Q
M
=
( )( )( )( )
( ) ( ) ( ) ( ) ( )
1
2 21
1 , , 1 = 1 = 120
2
1 1 1c
l N
i w w w m j kj k m
N
Gct x D j B k A m P d
N
G
χ
χδ χ χ
χ
χ
−=
− − − + − + − + −
∑ ∑ ∑∫ (4.41)
where Nc is the number of carriages, Aw is the distance between the two axles of a
single bogie, Bw is the distance between centres of two bogies of a single carriage and
Dw is the distance from the front wheel of each carriage, c is the speed of the train, t is
time and ( ), ,m j kP is the weight of the wheels.
Let’s now begin by examining the Dirac delta function in Equation (4.41), i.e. the
position the m-th wheel, of the k-th bogie, and the j-th carriage of the train is equal to:
( ) ( ) ( ) ( )1 1 1 1 0i w w wct x D j B k A mχ −− − + − + − + − = (4.42a)
( ) ( ) ( ) ( )1 1 1 1i w w wct x D j B k A mχ −= − − − − − − − (4.42b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
145
For multiple wheels acting on a single beam element, the second term on the right
hand side of Equation (4.41) can be written as follows:
( )( )( )( )
( ) ( ) ( ) ( ) ( )
1
2 21
1 , , 1 = 1 = 120
2
1 1 1c
l N
i w w w m j kj k m
N
Gct x D j B k A m P d
N
G
χ
χδ χ χ
χ
χ
−=
− − + − + − + − =
∑ ∑ ∑∫
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
1 1
2 21 1
1 , , 1 = 1 m = 1 2 1
2 1
1 1 1
1 1 1
1 1 1
1 1 1
c
i w w w
Ni w w w
Ly m j k
j k i w w w
i w w w
N ct x D j B k A m
G ct x D j B k A mF
N ct x D j B k A m
G ct x D j B k A m
−
−
= −
−
− − − − − − −
− − − − − − − −
− − − − − − − − − − − − − −
∑ ∑ ∑ (4.43)
It should be noted that Equation (4.43) is only valid when time t lies between
( ) ( ) ( )1 1 1 1i w w w
x D j B k A m
c
− + − + − + − and
( ) ( ) ( )1 1 1i w w w
x D j B k A m
c
+ − + − + −.
Using the same development from Equation (4.7) to (4.12c), the three additional
stiffness matrices for the wheel-rail contact element subjected to multiple wheels are
derived.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
146
4.3 Validating the Wheel-Rail Contact Elements
In order to validate the system, the author compares results from the use of the WRC
element with results from the use of the node-to-surface contact element in ANSYS
(CONTAC48) as well as with results from the literature. In all cases, unless otherwise
stated, the gravitational and damping effects of the beam are ignored, time t is
arranged in such a manner that the wheel (front wheel in Section 4.3.8) is at the left
support at t = 0 sec, the initial displacement and velocity of the beam is equal to zero,
the beam is discretized into 10 beam elements and the Newmark-β time integration
scheme (Bathe, 1996) with 200 equal time steps is used to solve the transient analysis.
It is also important to note that the Hertzian spring and sprung masses in each model
must undergo a static analysis prior to the execution of the transient analysis,
otherwise the masses will go into free vibration as the transient analysis is initiated.
4.3.1 Wheel as a moving sprung load traversing a cantilever beam
The author simulates a moving sprung load traversing a cantilever beam from the
fixed to the free end, and vice-versa as shown in Figure 4.6. The beam has a length L
of 7.62 m, flexural rigidity EI of 9.47 x 106 Nm
2 and mass per unit length m of 46
kg/m. Using Equation (C.27) the first natural frequency of this particular beam is
1 27.49 rad/sec,w = while the moving sprung load P is - 25.79 kN and it traverses the
beam at a constant speed c of 50.8 m/s. These properties are also adopted by Akin &
Mofid (1989). For this particular example, the author uses 200 equal time steps to
solve the transient analysis. The Hertzian spring stiffness kH is 1.4 x 106 kN/m, which
is a reasonably stiff value (Esveld, 2001).

Chapter 4 – Sprung mass represented by time varying stiffness matrices
147
Figure 4.6 Moving sprung load traversing a cantilever beam: (a) fixed-free beam;
(b) free-fixed beam
The vertical displacements at the free-end of the fixed-free and free-fixed cantilever
beam subjected to a moving sprung load, traversing from left to right, are plotted in
Figures 4.7a and 4.7b, respectively. One can see that the numerical results for the
WRC element and the ANSYS contacts agree with each other and with Figure 3.12.
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Figure 4.7: Vertical displacement at the free-end of a cantilever beam subjected to
a moving sprung load: (a) left hand side is fixed; (b) right hand side is fixed
(a)
(b)
L
c
L
c (a) (b)
P P
Hk
Hk

Chapter 4 – Sprung mass represented by time varying stiffness matrices
148
4.3.2 Wheel as a moving sprung mass traversing a cantilever beam
Using the same beam and vehicle properties as in Section 4.3.1, the author now
examines a moving sprung mass traversing a cantilever beam from the fixed to the
free end, and from the free to the fixed end. On this occasion, the sprung mass Mw is
2629 kg, such that is 7.5w
M ml and a Hertzian spring stiffness kH of 1.4 x 106 kN/m
is used.
The vertical displacement at the free-end of the fixed-free and free-fixed cantilever
beam subjected to a moving sprung mass can be seen in Figures 4.8a and 4.8b,
respectively. Again, the results from using the WRC element agree well with the
results from using the ANSYS contact element CONTAC48.
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-0.40
-0.35
-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Figure 4.8: Vertical displacement at the free-end of a cantilever beam subjected to
a moving sprung mass: (a) left hand side is fixed; (b) right hand side is fixed
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
149
In addition to examining the beam deflection, the author also examines the contact
force between the moving sprung mass and the fixed-free and free-fixed cantilever
beam, which are presented in Figures 4.9a and 4.9b. It should be noted that a negative
value indicates a compressive force between the wheel and the rail, while a zero value
of force indicates wheel-rail separation and all stiffness matrices related to that wheel
in the WRC element are set equal to zero. Therefore, one can conclude from Figure
4.9a that the wheel tends to lose contact with the beam at approximately time t = 0.08
sec and re-establishes contact briefly again at time t = 0.111 sec and 0.135 sec for this
particular speed and Hertzian spring stiffness.
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element
ANSYS CONTAC48
-16
-14
-12
-10
-8
-6
-4
-2
0
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element
ANSYS CONTAC48
Figure 4.9: Contact force between the wheel and rail: (a) left hand side is fixed;
(b) right hand side is fixed
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
150
Examining Figure 4.9b, one can conclude that the wheel tends to lose contact with the
beam on several occasions at the start of the analysis and as the wheel moves beyond
mid-span of the beam it gradually increases its wheel-rail compressive force. At time t
= 0.13 sec, the wheel-rail contact force is 15 times larger than the static weight of the
wheel. At time t = 0.14 sec, wheel-rail separation occurs. With the knowledge of
wheel-rail separation occurring in both beam models, the author finally plots the
vertical displacement of the moving sprung mass as a function of time in Figures
4.10a and 4.10b, respectively. It can be seen in Figure 4.10b that the wheel
experiences a positive upward displacement at time t = 0.14 sec, which explains the
loss of contact in Figure 4.9b.
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Beam free end deflection - Figure 4.8a
-0.40
-0.30
-0.20
-0.10
0.00
0.10
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Beam free end deflection - Figure 4.8b
Figure 4.10: Vertical displacement of the sprung mass as it travels along a
cantilever beam: (a) left hand side is fixed; (b) right hand side is fixed
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
151
4.3.3 Wheel as a moving sprung load traversing a simply supported beam
The bridge and vehicle properties adopted in the following examples in Sections 4.3.3
to 4.3.7 are the same as those of Yang and Wu (2001). The bridge has a length L of
25m, Young’s modulus of elasticity E of 2.87x106 kN/m
2, moment of inertia I of 2.9
m4, mass per unit length m of 2.303 t/m and a Poisson’s ratio ν of 0.2. In addition, the
wheel traverses the bridge at a constant speed c of 27.78 m/s (100 km/hr), the
Hertzian spring stiffness kH is 1595 kN/m and 200 equal time steps are used to solve
the transient analysis.
Figure 4.11 presents a simply supported beam, which is subjected to a moving sprung
load P travelling at speed c from left to right. As in Section 4.3.1, the wheel is given a
zero mass and the point force P of 56.4 kN is attached to the centre of the wheel i.e.
local node 2 of the spring.
Figure 4.11: Simply supported beam subjected to a moving sprung load
The vertical displacement, acceleration and bending moment at mid-span of the beam
as a function of time can be seen in Figures 4.12a, 4.12b and 4.12c, respectively. In
this example, the author only examines the internal forces at local node 2 of the
element at mid-span of the beam; however, one is aware that this internal force differs
slightly with local node 1 of the other element at mid-span. The reader should refer
back to Section 3.2.2.2 to 3.2.2.4 for an explanation of the differences between LN1
L

Chapter 4 – Sprung mass represented by time varying stiffness matrices
152
and LN2. In each plot, the author compares the results obtained using the WRC
element with results from using the ANSYS contact element and it can be observed
that both systems give very similar results.
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-0.4
-0.2
0.0
0.2
0.4
0.6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element ANSYS CONTAC48
0
100
200
300
400
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
WRC Element (Element5_LN2)
ANSYS CONTAC48 (Element5_LN2)
Figure 4.12: (a) Vertical displacement; (b) vertical acceleration; (c) bending
moment (local node 2 of the beam element) at mid-span of the beam
due to a moving sprung load as a function of time
(a)
(b)
(c)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
153
4.3.4 Wheel as a moving sprung mass traversing a simply supported beam
In Figure 4.13 a simply supported beam is subjected to a moving sprung mass Mw of
5.75 t traversing a beam at a constant speed from left to right.
Figure 4.13: Simply supported beam subjected to a moving sprung mass
As before, one studies the deflection, vertical acceleration and bending moment at
mid-point of the beam as a function of time in Figures 4.14a, 4.14b and 4.14c,
respectively. The vertical displacement and acceleration of the sprung mass as a
function of time are shown in Figures 4.15a and 4.15b, respectively. In Figure 4.16, a
plot of the contact force between the wheel and the rail is presented. From inspection,
the results from the WRC element are almost identical with the results from ANSYS
CONTAC48 element.
Another interesting feature observed between Figures 4.15b and 4.16 is that vertical
acceleration of the moving sprung mass tends to behave in a somewhat similar
manner to the wheel-rail contact force. As the wheel experiences a positive
acceleration in Figure 4.15b, the wheel rail-contact force undergoes an increase in its
compressive force; whereas, a negative acceleration in Figure 15b tends to decrease
the compressive force.
L

Chapter 4 – Sprung mass represented by time varying stiffness matrices
154
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-0.4
-0.2
0.0
0.2
0.4
0.6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2) WRC Element ANSYS CONTAC48
0
100
200
300
400
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
WRC Element (Element5_LN2)
ANSYS CONTAC48 (Element5_LN2)
Figure 4.14: (a) Vertical displacement; (b) vertical acceleration; (c) bending
moment (local node 2 of the beam element) at mid-span of the beam
due to a moving sprung mass as a function of time
(a)
(b)
(c)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
155
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element
ANSYS CONTAC48
Figure 4.15: (a) Vertical displacement; (b) vertical acceleration of the sprung mass
as a function of time
-1.10
-1.05
-1.00
-0.95
-0.90
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element
ANSYS CONTAC48
Figure 4.16: Contact force between the sprung mass and beam
(b)
(a)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
156
4.3.5 A travelling bouncing wheel traversing a rigid rail and beam
In the following example, one examines the effects of wheel-rail separation, whereby
the wheel is modelled as a travelling sprung mass with an initial positive extension
resulting in a zero contact force. As mentioned earlier, when the extension in the
Hertzian spring becomes positive, no contact exists between the wheel and the rail,
the contact force is zero, and the Hertzian stiffness matrices are put equal to zero.
In this example, rigid rails are located on either side of a simply supported beam as
shown in Figure 4.17. The wheel at time t = 0 sec is at a distance lr of 25m from the
left support of the beam, while the initial vertical extension is 0.01m i.e. separation
between bottom of the wheel and rail is 0.01m. The wheel traverses the simply
supported beam between the times t = 0.9 to 1.8 sec and at all other times the wheel
travels on the rigid rail. The unstrained spring has a length of 0.5m.
Figure 4.17: Rigid rail and simply supported beam subjected to a travelling
bouncing wheel
The vertical displacement of the beam (at mid-point) and the wheel as a function of
time is plotted in Figures 4.18 and 4.19, respectively, while the contact force between
the wheel and rail is shown in Figure 4.20. Again, excellent agreement can be seen
between the solution from using the WRC element and that from using the ANSYS
CONTAC48 element.
L lr

Chapter 4 – Sprung mass represented by time varying stiffness matrices
157
-0.006
-0.005
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.0 0.5 1.0 1.5 2.0 2.5
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Figure 4.18: Vertical displacement at mid-point of the beam due to the travelling
bouncing wheel
-0.12
-0.10
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.0 0.5 1.0 1.5 2.0 2.5
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
Figure 4.19: Vertical displacement of the travelling bouncing wheel
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.0 0.5 1.0 1.5 2.0 2.5
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element ANSYS CONTACT48
Figure 4.20: The contact force between the rail and the travelling bouncing wheel
Wheel on
rigid rail
Wheel on
rigid rail

Chapter 4 – Sprung mass represented by time varying stiffness matrices
158
One can also see from Figure 4.20 that as the wheel regains contact with the rail it
generates a large impact load, much greater than the weight of the wheel; thus the
maximum deflection of the beam shown in Figure 4.18 is much greater than the
corresponding value in Figure 4.14a.
4.3.6 Sprung & unsprung wheel systems at a wide range of contact stiffness
The WRC element models the wheel of a vehicle as sprung mass involving a Hertzian
spring. In this section, the author compares the results using the WRC element with
the results using the unsprung mass of Olsson (1985); however, the author uses both
hard and soft Hertzian springs for the WRC elements because Hertzian springs are
absent from Olsson’s (1985) model as shown in Figure 4.21.
Figure 4.21: (a) Olsson’s (1985) unsprung wheel; (b) the author’s sprung wheel
The bridge properties used in the following examples are the same as Section 4.3.3,
while dimensionless parameters, similar to those of Olsson (1985), are adopted for the
vehicle, such that the vehicle to bridge mass ratio is 0.5; the unsprung wheel mass to
sprung vehicle mass ratio is 0.25; the bridge to vehicle frequency ratio is 3; the
vehicle damping ratio is 0.125; thus, in this example Mw is 5.75 t, Mv is 23 t, k1 is
(a) Olsson unsprung model (b) Authors’ sprung model

Chapter 4 – Sprung mass represented by time varying stiffness matrices
159
2300 kN/m, and c1 is 57.5 kNs/m. Other dimensionless parameters such as speed ratio
α and dynamic amplification factor DAFU have been defined in Section 3.2.3.
In Figure 4.22, the author compares the result using the WRC element with the results
using the unsprung mass of Olsson (1985) under smooth rail conditions for a range of
Hertzian spring stiffness values. The results with the harder Hertzian spring stiffness
have a greater likeness with the solution of Olsson (1985) at all speeds, whereas the
results using softer Hertzian spring stiffness only compare well with Olsson (1985)
results at lower speeds. Hence, the WRC element can also be used for moving
unsprung mass models provided that the Hertzian spring stiffness is given a
reasonably larger value.
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio α α α α
DA
FU
Hertzian Stiffness = 1.595E3 kN/m
Hertzian Stiffness = 1.595E5 kN/m
Hertzian Stiffness = 1.595E7 kN/m
Olsson (1985) Unsprung Mass
Figure 4.22: Simply supported beam subjected to a moving vehicle using different
Hertzian spring stiffness on a smooth rail

Chapter 4 – Sprung mass represented by time varying stiffness matrices
160
4.3.7 Sensitivity analysis of the WRC element
It has been shown in Section 3.2.2.3 that the results from the ANSYS contact
elements tend to lose accuracy as the number of beam elements in the model is
reduced; therefore, the author must also examine the WRC element using a coarser
beam mesh, i.e. only 4 beam elements, to see if this is also true for this model. As an
experiment, the author also replaces the shape functions N1 with H1 and N2 with H2, while
G1 and G2 are set to zero, to show that ANSYS contact element is a linear WRC element.
Using the same bridge and vehicle properties as in Section 4.3.4, Figure 4.23 plots the
vertical displacement and bending moment at mid-span of the beam as a function of
time for both the WRC element and ANSYS contact element method. The bridge is
discretized into four beam elements. The vertical displacement of the sprung mass as
a function of time for both systems is presented in Figure 4.24. It can be seen from
each plot that the accuracy of the WRC element is unchanged when the number of
beam elements in the model is reduced from ten to four elements, unlike the ANSYS
contact element system that seems to lose its accuracy. It should be noted that in
Figure 4.23b, the differences in the bending moment for the WRC element at mid-
span relate to the same numerical issue observed in Figure 3.15 and 3.17.
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - 4 elements
ANSYS CONTAC48 - 4 elements
Linear WRC Element - 4 element
Figure 4.14a - 10 elements
(a)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
161
0
100
200
300
400
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
WRC Element - 4 elements
ANSYS CONTAC48 - 4 elements
Linear WRC Element - 4 elements
Figure 4.14c - 10 elements
Figure 4.23: (a) Vertical displacement; (b) bending moment (local node 2 of the
beam element) at mid-span of the beam due to a moving sprung mass
as a function of time using only 4 beam elements
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - 4 elements
ANSYS CONTAC48 - 4 elements
Linear WRC Element - 4 elements
Figure 4.15a - 10 elements
Figure 4.24: Vertical displacement of the sprung mass as a function of time using
only 4 beam elements
Another issue that the author wishes to examine during this sensitivity analysis of the
WRC element relates to a moving sprung mass traversing a cantilever beam. In
Section 4.3.2, it is shown that the moving sprung mass loses contact with a cantilever
beam, whichever direction it is travelling in; therefore, the author considers modelling
both cantilever beams again using 2000 equal time-step to ensure that the solution is
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
162
unchanged. The reader can see the contact force that exists between the mass and
beam for both the fixed-free and free-fixed cantilever beam in shown Figures 4.25a
and 4.25b, respectively. It can be observed from the results that there are minimal
differences between the graphs of Figure 4.25 and Figure 4.9. The latter only uses 200
equal time-steps. Wheel-rail separation still occurs in both solutions.
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element (200 ts)
WRC Element (2000 ts)
-16
-14
-12
-10
-8
-6
-4
-2
0
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element (200 ts)
WRC Element (2000 ts)
Figure 4.25: Contact force between the wheel and rail using 2000 equal time-steps:
(a) fixed-free beam; (b) free-fixed beam
4.3.8 Simply supported beam subjected to a two-wheeled sprung system
In this section, the author examines the effects of a two-wheeled sprung system
traversing a simply supported beam as shown in Figure 4.26. The vehicle comprises a
rigid vehicle body supported by a pair of axles by means of primary suspensions,
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
163
consisting of a spring and dashpot. Like the bridge and vehicle of Yang and Wu
(2001), the bridge has a length L of 30m, Young’s modulus of elasticity E of
2.943x107 kN/m
2, moment of inertia I of 8.65 m
4, mass per unit length m of 36 t/m
and a Poisson’s ratio ν of 0.2, while the vehicle model has two sprung wheel masses
Mw of 0 t, a vehicle mass Mv of 540 t, a rotational moment of inertia Iv of 13800 t m2,
suspension stiffness k1y of 41350 kN/m, suspension damping c1y of 0 kN s/m, distance
between wheel axles Aw of 17.5 m and a vehicle speed c of 27.778 m/s (100 km/hr).
The Hertzian spring stiffness adopted is kH = 1.595 x107 kN/m. In this model, the
mass and moment of inertia of the vehicle is applied at the centre node of the vehicle
body (Vc) by means of two massless beam elements supported by the suspension springs.
Longitudinal springs with a stiffness k1x of 1000 kN/m are also included in this model.
Figure 4.26: Two-wheeled sprung system traversing a simply supported beam
A plot of the vertical displacement and acceleration at mid-span of the beam as a
function of time can be seen in Figures 4.27a and 4.27b, respectively, while the
vertical acceleration of the vehicle body (Vc) is presented in Figure 4.28. The wheel-
rail contact force for the front wheel of the vehicle is shown in Figure 4.29. As before,
the results from using the WRC element are similar to those from using the ANSYS
contact element, provided that a sufficient number of beam elements are used in the
model.
wM
wM
1yc 1y
c1y
k 1yk
Hk
, v v
M I
cc
V
L
, , E I mwA
Hk
1xk1x
k

Chapter 4 – Sprung mass represented by time varying stiffness matrices
164
-0.010
-0.008
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element
ANSYS CONTAC48
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element
ANSYS CONTAC48
Figure 4.27: (a) Vertical displacement; (b) vertical acceleration at mid-span of the
beam as a function of time due to a two-wheeled vehicle
-0.50
-0.25
0.00
0.25
0.50
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element
ANSYS CONTAC48
Figure 4.28: Vertical acceleration of the vehicle body (Vc) of a two-wheeled vehicle
as a function of time
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
165
-1.10
-1.05
-1.00
-0.95
-0.90
0.0 0.5 1.0 1.5 2.0
Dimesionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element
ANSYS CONTAC48
Figure 4.29: The contact force between the rail and front wheel of the vehicle as a
function of time
4.3.9 Two-wheeled vehicle subjected to braking effects
Until now, one has only focused on the vertical response of the bridge and vehicle;
however, in this section one examines both the vertical and horizontal responses of a
two-wheeled vehicle as it is decelerating along the bridge. The bridge and vehicle
properties are the same as those of Section 4.3.8. In all examples, as the front wheel of
the vehicle enters the bridge at time t = 0 sec, it decelerates at a constant value a
(positive, if accelerating). The distance the vehicle travels as it decelerates is 60 m.
Like Yang and Wu (2001), one considers the following three cases: (1) 50c = m/s,
10a = − m/s2; (2) c = 100 m/s, 10a = − m/s
2; (3) 100c = m/s, 20a = − m/s
2. On this
occasion, results from the developed models are compared with the results from the
literature, as the ANSYS contact elements are unable to simulate the braking effects
of the vehicle. With the aid of Equation (G.10), the author specifically computes the
times when the front wheel of the vehicle arrives on the left-hand support, mid-span
and right-hand support of the beam. In addition, when the front wheel has travelled
47.5 m (Aw + L), the rear wheel of the vehicle arrives on the right hand support. These
computed times are presented in Tables 4.1 to 4.3 for the three models examined.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
166
Table 4.1: Model 1 - Vehicle decelerating at -10 m/s2
Table 4.2: Model 2 - Vehicle decelerating at -10 m/s2
Train decelerates from 100.000 m/s to 93.808 m/s over 60 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 100.000 Front wheel of vehicle at LHS
0.151 15.000 98.488 Front wheel of vehicle at mid-span
0.305 30.000 96.954 Front wheel of vehicle at RHS
0.487 47.500 95.132 Rear wheel of vehicle at RHS
Table 4.3: Model 3 - Vehicle decelerating at -20 m/s2
Train decelerates from 100.000 m/s to 87.178 m/s over 60 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 100.000 Front wheel of vehicle at LHS
0.152 15.000 96.954 Front wheel of vehicle at mid-span
0.310 30.000 93.809 Front wheel of vehicle at RHS
0.500 47.500 90.001 Rear wheel of vehicle at RHS
It should it noted that the speed c used in the dimensionless parameter ct/L in the
following results is computed by averaging the initial and final speed of the vehicle in
each model. For comparison purposes, the vertical displacement at mid-span of the
beam and vertical acceleration of the vehicle body as a function of time are compared
with the results from the literature. The author’s results are shown in Figures 4.30a
and 4.31a, while Yang and Wu (2001) results are shown in Figures 4.30b and 4.31b.
Train decelerates from 50.000 m/s to 36.056 m/s over 60 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 50.000 Front wheel of vehicle at LHS
0.310 15.000 46.904 Front wheel of vehicle at mid-span
0.641 30.000 43.589 Front wheel of vehicle at RHS
1.063 47.500 39.370 Rear wheel of vehicle at RHS

Chapter 4 – Sprung mass represented by time varying stiffness matrices
167
From inspection of these results, it can be seen that there are good similarities
between the author’s solutions and Yang & Wu’s (2001) solutions. Both sets of
results display similar shapes and magnitudes, especially the 2nd
and 3rd
model. In
addition, the results show that the 2nd
and 3rd
model tend to give a larger vertical
response than the 1st model, which indicates that the speed of the vehicle entering the
bridge, at time t = 0 sec, has a greater influence on the vertical response than the
braking effect of the vehicle, even though the deceleration of the vehicle occurs over a
quite limited time frame according to Yang & Wu (2001).
-0.010
-0.008
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC (Model1)
WRC (Model2)
WRC (Model3)
Figure 4.30: Vertical displacement at mid-span of the beam as a function of time
due to vehicles decelerating: (a) numerical solution; (b) Yang and Wu
(2001) solution
(a)
Dimensionless time ct/L
(b) Yang & Wu (2001) Model 1
Yang & Wu (2001) Model 2
Yang & Wu (2001) Model 3

Chapter 4 – Sprung mass represented by time varying stiffness matrices
168
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC (Model1)
WRC (Model2)
WRC (Model3)
Figure 4.31: Vertical acceleration of the vehicle body as a function of time due to
vehicles decelerating: (a) numerical solution; (b) Yang and Wu (2001)
solution
A plot of the horizontal reaction force experienced by the pinned support as the
vehicle decelerates at the different speeds is shown in Figure 4.32. It can be seen from
Figure 4.32 that the horizontal reaction force tends to increase significantly as each
wheel enters the bridge and then as each wheel leaves the bridge there is a sudden
drop in the force followed by a fluctuation of the force, which is a similar observation
made in the Yang & Wu (2001) study. It is unusual from Yang & Wu (2001) results
that all three models tend to give the same shape and values especially when
Newton’s Second Law of motion states that F = Ma and secondly their magnitude
differs by a factor of 5 (Model 1 and 2) and 10 (Model 3) with the author’s solution.
(b)
(a)
Dimensionless time ct/L
Yang & Wu (2001) Model 1 (c = 50 m/s; a = -10 m/s^2)
Yang & Wu (2001) Model 2 (c = 100 m/s; a = -10 m/s^2)
Yang & Wu (2001) Model 3 (c = 100 m/s; a = -20 m/s^2)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
169
-15000
-10000
-5000
0
5000
10000
15000
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Dimensionless time ct /L
Re
ac
tio
n F
orc
e (
kN
)
Model 1 (WRC)
Model 2 (WRC)
Model 3 (WRC)
Figure 4.32: Horizontal reaction force due to the vehicles decelerating: (a) WRC
numerical solution; (b) Yang and Wu (2001) solution
Furthermore, Yang & Wu (2001) relates the ith wheel horizontal contact force i
H to
its vertical weight i
V by i i i
H Vµ= , where i
µ is the friction coefficient for the ith
wheel. This implies that their horizontal reaction force is not dependent on the
acceleration of the vehicle unlike in the author’s system; hence, all three of their
results have similar magnitude and shape. Inspecting Figure 4.32a, the reader can see
that the author’s results are dependant on the acceleration of the vehicle. The bridge
reaction force is then minus one times the applied force.
Yang & Wu (2001) Model 1 (c = 50 m/s; a = -10 m/s^2)
Yang & Wu (2001) Model 2 (c = 100 m/s; a = -10 m/s^2)
Yang & Wu (2001) Model 3 (c = 100 m/s; a = -20 m/s^2)
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
170
4.4 Application of WRC element to Boyne Viaduct
Based on the results of Section 4.3, the author can claim that the wheel-rail contact
element is exceedingly robust for smooth rail conditions; hence, one is in a position to
apply this technique to the Boyne Viaduct railway-bridge subjected to a moving
vehicle. In this section, one begins by representing the railway vehicle as a single
moving sprung mass, while later on in the section; a realistic three-dimensional
vehicle comprising wheels, suspensions and vehicle bodies is used to represent the
train. Depending on the results sought, one can adopt a simple or complex vehicle
model. Should one be primarily interested in the dynamic response of the bridge, then
the single moving sprung mass is the better option. However, if one is also interested
in the vehicle response then a two-dimensional or three-dimensional model of the
vehicle is needed. The two-dimensional bridge and vehicle model has the advantage
of being less complex than the three-dimensional bridge and train model; however,
one is only able to obtain displacements in the vertical and horizontal directions as
well as the rotation about the z-axis (equivalent to the pitching motion for the vehicle)
for the former model. In the three-dimensional bridge and train model, one can obtain
displacements in all three directions (vertical, horizontal and lateral) as well as
obtaining the three rotations about the x, y and z-axes (equivalent to the rolling,
yawing and pitching motion of the vehicle) as external loads are applied to the train.
4.4.1 Single sprung wheel traversing two-dimensional Boyne Viaduct
One starts by examining a two-dimensional Boyne Viaduct railway bridge subject to a
single moving sprung wheel travelling at slow (10 km/hr) and fast speed (164 km/hr).
Since each wheel from the 201 Class Irish-Rail locomotive has a weight of 91.25 kN
as shown in Figure 3.31, its mass Mw is equal to 9.3 t. In this example, 0.1P G ≈ and
the Hertzian contact stiffness used throughout is kH = 1.4 x 106 kN/m, while time t is

Chapter 4 – Sprung mass represented by time varying stiffness matrices
171
arranged in such a manner that the wheel arrives on the bridge at t = 0 sec; thus,
exiting the bridge at 1ct L = . It is unrealistic to model the whole train as a single
moving sprung mass; instead, only the front wheel of the train is chosen in this model.
In Figure 4.33, the author plots the vertical displacement and internal axial forces at
mid-span of the bridge as a function of time. As before, the static effects of the bridge
are omitted; hence, only the dynamic effects are taken into account. From inspection
of Figure 4.33, the reader can see that the dynamic response of the bridge is minimal
at the slow speed (10km/hr), while at the higher speed (164 km/hr) the bridge tends to
experience a noticeable increase in deflection and axial force.
In addition, one also presents the vertical acceleration of the vehicle i.e. the sprung
wheel, which is often used as a measurement of the riding comfort experienced by the
passengers. Many studies such as those of Yau et al. (1999) and Wu and Yang (2003)
recommend that the vertical acceleration not exceed 0.5 m/s2 (as adopted by France-
SNCF and Taiwan-HSR) while the Eurocodes (1990) use a less severe value of 1.0
m/s2. In any case, prolonged exposure to accelerations exceeding these recommended
values can lead to a reduction in the passenger riding comfort. It can be seen from
Figure 4.34 that at the slow speed (10 km/hr) the riding comfort value for sprung mass
wheel lies well within the recommended values, while at the faster speed of 164 km/hr
the sprung mass wheel tends to exceed the value of 0.5 m/s2 on numerous occasions,
whilst remaining within the Eurocodes (1990) value of 1.0 m/s2.
In Figure 4.35 the contact force that exists between the moving sprung wheel and
bridge is plotted. As observed in previous results, the contact force effects between
the vehicle and bridge are minimal at the slow speed and quite substantial at the faster
speed. Nevertheless, wheel-rail separation is not present for this particular problem.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
172
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Dy
na
mic
co
eff
icie
nt
Moving Sprung Wheel - 10 km/hr
Moving Sprung Wheel - 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
Moving Sprung Wheel - 10 km/hr
Moving Sprung Wheel - 164 km/hr
Figure 4.33: (a) Vertical displacement; (b) axial force at mid-span of the Boyne
Viaduct due to a sprung wheel travelling at 10 km/hr and 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ve
rtic
al a
cc
ele
rati
on
(m
/s2)
Moving Sprung Wheel - 10 km/hr (multiplied by a factor of 50)
Moving Sprung Wheel - 164 km/hr
Figure 4.34: Vertical acceleration of the wheel i.e. riding comfort
(a)
Bottom Chord
Top Chord
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
173
-1.15
-1.10
-1.05
-1.00
-0.95
-0.90
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
Moving Sprung Wheel - 10 km/hr
Moving Sprung Wheel - 164 km/hr
Figure 4.35: Contact force between the wheel and bridge as a function of time
For a more in-depth analysis of the Boyne Viaduct subjected to a moving sprung
wheel, the author now considers the dynamic response of the bridge at a range of
wheel speeds. From Section 3.2.3, the critical speed of the vehicle has already been
computed as 550 m/s,cr
c = or 1980 km/hr. However, it should be noted that a more
realistic range of speeds between 10 km/hr to 300 km/hr i.e. 0 0.15α< < are of
greater interest to the author. Furthermore, it is observed from Figure 4.36 that at
extremely high speeds >300 km/hr, the sprung wheel tends to lose contact with the
bridge and the impact loads experienced by the bridge as the wheel regained contact,
greatly increases the dynamic amplification factor as shown in Figure 4.37. The
contact force between the sprung wheel and bridge at speed ratios
0.125 and 0.25,α = which is equivalent to 247 km/hr and 495 km/hr is shown in
Figure 4.36. This plot shows that wheel-rail separation occurs frequently at the
excessively larger speed. The dynamic amplification factors DAFU and DAFA for the
sprung wheel at a range of speeds can be seen in Figure 4.37. As the speed of the
sprung wheel increases beyond 0.25,α < the impact loading due to wheel-rail
separation gives very large DAFU and DAFA values.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
174
-5.0
-4.0
-3.0
-2.0
-1.0
0.0
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
Moving Sprung Wheel - 247 km/hr
Moving Sprung Wheel - 495 km/hr
Figure 4.36: Contact force between the wheel and bridge at extremely high speeds
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FU
Single Sprung Wheel (P/G = 0.1)
Moving Load - Figure 3.23a
1.0
1.5
2.0
2.5
3.0
3.5
4.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FA
Single Sprung Wheel (P/G = 0.1) - Bot Chord
Single Sprung Wheel (P/G = 0.1) - Top Chord
Moving Load - Bot Chord - Figure 3.23b
Moving Load - Top Chord - Figure 3.23b
Figure 4.37: Dynamic amplification factor at mid-span of the Boyne Viaduct versus
speed ratio: (a) deflection; (b) axial internal forces
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
175
A closer examination of the DAFU at a range of realistic speed values, as represented
by the vertical dashed line in Figure 4.37a, can be seen in Figure 4.38. It can be
observed from Figure 4.38 that the additional wheel inertia tends to slightly increase
the dynamic response of the bridge. Furthermore, one can see that as the speed of the
sprung wheel passes between 80 km/hr to 100 km/hr, the DAFU is significantly
greater than the moving load, while at most other speeds the difference in the DAFU
between the moving load and sprung wheel is somewhat less.
1.00
1.05
1.10
1.15
1.20
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Single Sprung Wheel (P/G = 0.1)
Moving Load - Figure 3.24
Figure 4.38: A close-up view of Figure 4.37a using a realistic range of speeds
4.4.2 Railway Vehicle
As shown in Figure 4.39, each vehicle consists of a vehicle body supported by a pair
of bogies, with each bogie supported by axles. Finally a pair of wheels supports each
axle. The bogies are connected to the axles through primary suspensions and to the
vehicle body through secondary suspensions, with each suspension consisting of a
spring and dashpot. In the two-dimensional models, one assumes that the weight of all
components is halved.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
176
secondary suspension
primary suspension
Hertian spring
vehicle body
bogie
wheelset
vehicle body
bogie
Side View
bogie
Front View
wheels wheels
secondary suspension
primary suspension
Hertian spring
vehicle body
bogie
wheelset
vehicle body
bogie
Side View
bogie
Front View
wheels wheels
Figure 4.39: Three-dimensional railway carriage model (a) descriptive; (b) using
symbolization
The total mass of each wheel, bogie frame and vehicle body is denoted by the
symbols Mw, Mb and Mv. In Appendix G, the author computes the equivalent mass
moment of inertia for the bogie frame and vehicle body and these values can be found
in Table 4.4. The primary spring stiffness and damping is given by k1 and c1, while k2
and c2 denote the secondary spring stiffness and damping. The Hertzian spring
stiffness, also known as the wheel-rail contact stiffness, is given by kH. Longitudinal
and lateral springs are required between the vehicle body and the bogie and also
between the bogie and axles to prevent the structure from becoming a mechanism.
These horizontal springs are independent from the main suspension springs.
(a)
2 yk 2 y
c
1yk 1y
k
2 yk
1yc
1yc
2 yc
HkH
kw
Mw
Mw
Mw
M
,v zzv
M I
,b zzb
M I
(b)
,b zzb
M I
,v xxv
M I
bM
1 1,z z
k c
1 1,y y
k c
1 1,z z
k c
1 1,y y
k c
Front View
Side View
2wA
1wA
wb
vb
vl
0h
1h
3h
y
x
y
z
4wA
3wA
wB
2 2,x x
k c
vh

Chapter 4 – Sprung mass represented by time varying stiffness matrices
177
Each wheel of the train is modelled using lumped masses, while elastic beam
elements are used to model the bogie frame and vehicle body. The primary and
secondary suspensions are then modelled using spring elements. Figure 4.40 shows
the author’s six-axle 201 Class locomotive and four-axle Mark3 railway coach
modelled in ANSYS. In addition, the author indicates, in particular, the 1st (W1 is the
front wheel of the locomotive) and 7th
(W7 is the front wheel of the first railway
coach) wheel of the train. The nodes V1 and V2 on the vehicle bodies of the
locomotive and railway coach, respectively, are also shown. These nodes are
examined in the results.
Figure 4.40: Six-axle 201 Class locomotive and four-axle Mark3 railway coach
modelled using beam, spring and lumped mass elements in ANSYS
(Bowe and Mullarkey, 2005)
A list of vehicle properties and dimensions for both the Class 201 locomotive and
Mark3 railway coach adopted in this study are presented in Table 4.4. It should be
noted that the symbol X marked in the left hand column, indicates that this particular
value is not used or required in the two-dimensional vehicle model.
V1
W1 – First wheel of the train (node)
W7 – Seventh wheel of the train (node)
V1 – Vehicle body of the locomotive (node)
V2 – Vehicle body of the railway coach (node) V2
W1
W7

Chapter 4 – Sprung mass represented by time varying stiffness matrices
178
Table 4.4: Vehicle dimensions and parameters (Irish Rail vehicle data sheet)
Data Symbols Unit Loco 201 MK3
coach
Mass properties
Mass of vehicle body Mv t 64.48 35.74
x Roll inertia of vehicle body Ixxv tm2 123.0 68.2
x Yaw inertia of vehicle body Iyyv tm2 2008 1287
Pitch inertia of vehicle body Izzv tm2 2002 1284
Mass of bogie frame Mb t 10.18 3.15
x Roll inertia of bogie frame Ixxb tm2 10.18 3.15
x Yaw inertia of bogie frame Iyyb tm2 21.73 4.91
Pitch inertia of bogie frame Izzb tm2 11.55 1.76
Mass of wheel Mw t 4.52 1.50
Roll inertia of wheel Ixxw tm2 4.52 1.50
Suspension stiffness
Primary suspension in the longitudinal direction k1x kN/m 4240 20260
Secondary suspension in the longitudinal direction k2x kN/m 320 422
Primary suspension in the vertical direction k1y kN/m 1470 3185
Secondary suspension in the vertical direction k2y kN/m 630 566
x Primary suspension in the lateral direction k1z kN/m 2120 10130
x Secondary suspension in the lateral direction k2z kN/m 160 211
Suspension damping
Primary suspension in the longitudinal direction c1x kNs/m 1.00 0.000
Secondary suspension in the longitudinal direction c2x kNs/m 32.00 41.44
Primary suspension in the vertical direction c1y kNs/m 4.00 32.41
Secondary suspension in the vertical direction c2y kNs/m 20.00 26.24
x Primary suspension in the lateral direction c1z kNs/m 1.00 0.00
x Secondary suspension in the lateral direction c2z kNs/m 32.00 41.44
Dimension - longitudinal direction - x
1st axle to c.o.g. of bogie frame Aw1 m 1.689 1.300
2nd axle to c.o.g. of bogie frame Aw2 m 0.000 1.300
3rd axle to c.o.g. of bogie frame Aw3 m 2.019 1.300
4th axle to c.o.g. of bogie frame Aw4 m 1.689 1.300
5th axle to c.o.g. of bogie frame Aw5 m 0.000 -
6th axle to c.o.g. of bogie frame Aw6 m 2.019 -
Rear axle of a vehicle to front axle of next vehicle Cw m 4.169 4.400
Front bogie frame c.o.g. to c.o.g. of rear bogie frame Bw m 13.405 16.000
Half of bogie frame to c.o.g. of vehicle body lbg m 6.703 8.000
Overall length of vehicle body lv m 19.113 20.600
Dimension - vertical direction - y
Height from rail to wheel centre h0 m 0.508 0.460
Height from rail to c.o.g of bogie h1 m 0.843 0.600
Height from rail to secondary suspension h2 m 0.843 0.600
Height from rail to c.o.g. of vehicle body h3 m 1.393 0.220
Overall height of vehicle body hv m 2.200 2.200
Dimension - lateral direction - z
x Gauge width of wheelset bw m 1.500 1.500
x Overall width of vehicle body bv m 2.000 2.000

Chapter 4 – Sprung mass represented by time varying stiffness matrices
179
4.4.3 Two-dimensional bridge-train model
In this section, the author analyses the vertical response of the two-dimensional
Boyne Viaduct subjected to the moving train that is described in Section 4.4.2. As
with previous models, one examines the dynamic response of the bridge subjected to a
vehicle traversing the bridge at a slow speed (10 km/hr) as well as at a high speed
(164 km/hr). Time t is arranged in such a manner that the front wheel enters the bridge
at time t = 0 sec and exits the bridge at 1ct L = . It should also be worth noting that
for the following example the vehicle-to-bridge ratio is computed as P/G = 1.34;
however, this value doesn’t take into account that the train, which measures a length
of 85.88 m from the front wheel to the rear wheel of the train, is slightly longer than
the bridge,. Therefore, the P/G ratio experienced by the bridge varies from 1.20 to
1.05, which relates to the front wheel of the train arriving on the right-hand support
and the rear wheel of the train arriving on the left-hand support, respectively.
A plot of the vertical displacement and axial force in the top and bottom chord at mid-
span of the two-dimensional Boyne Viaduct subjected to a moving train at the two
different speeds is shown in Figure 4.41. It can be seen that the results for faster speed
(164 km/hr) have a greater oscillatory motion than the results for slower speed (10
km/hr); however, the oscillations of the response are smaller than the oscillations of
the moving load solution in Figure 3.33. In addition to the dynamic response of the
bridge, one also examines the vertical acceleration or riding comfort value of the train
travelling at the faster speed (164 km/hr) as shown in Figure 4.42. This plot shows
that the vertical accelerations of both the locomotive (V1 of Figure 4.40) and 1st
railway coach (V2 of Figure 4.40) lie well within the recommended value of 1.0 m/s2
specified in Eurocodes (1990), for the higher vehicle speed.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
180
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
De
fle
cti
on
co
eff
icie
nt
2D Boyne - 2D Train at 10 km/hr
2D Boyne - 2D Train at 164 km/hr
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
Ax
ial fo
rce
co
eff
icie
nt
2D Boyne - 2D Train at 10 km/hr
2D Boyne - 2D Train at 164 km/hr
Figure 4.41: (a) Vertical displacement; (a) axial force at mid-span of the 2D Boyne
Viaduct due to a train travelling at 10 km/hr and 164 km/hr
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
2D Train - 164 km/hr (V1) 2D Train - 164 km/hr (V2)
Figure 4.42: Vertical acceleration (riding comfort value) of the vehicle bodies
(a)
(b)
Bottom chord
Top chord

Chapter 4 – Sprung mass represented by time varying stiffness matrices
181
In Figure 4.43, the contact force that exists between the 1st and 7
th wheel of the train
and the rail are examined at the faster speed (164 km/hr). It can be seen from the
results that, as wheels enter the bridge or immediately after they leave the bridge
(arrives on the rigid rail); the compressive force between the wheel and rail tends to
oscillate abruptly, gradually reducing in amplitude over time.
-1.4
-1.2
-1.0
-0.8
-0.6
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct/L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
2D Train - 164 km/hr (W1)
2D Train - 164 km/hr (W7)
Figure 4.43: Contact force between the 1st and 7
th wheel and the rail
Next, the author examines the dynamic response of the two-dimensional Boyne
Viaduct subjected to the moving train at a range of realistic speeds between
0 0.15α< < i.e. 10 km/hr to 300 km/hr. Exceeding this particular range of speed is
likely to increase the chances of wheel-rail separation, which can greatly change the
dynamic behaviour of the bridge, as shown in Section 4.3.5. Figure 4.44 presents the
dynamic amplification factors DAFU and DAFA for a range of speeds between 10
km/hr to 300 km/hr. First, it can be seen from Figure 4.44 that results from the
author’s wheel-rail contact (WRC) element compare well with the results from
ANSYS contact elements, while second, it is observed that the results for moving
two-dimensional train model are much less oscillatory than results for the bridge
subjected to a moving load.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
182
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
2D Boyne (2D Train using WRC)
2D Boyne (2D Train using ANSYSCE)
2D Boyne (Moving Load)
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Bot Chord (2D Train using WRC)
Bot Chord (2D Train using ANSYSCE)
Bot Chord (Moving Load)
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Top Chord (2D Train using WRC)
Top Chord (2D Train using ANSYSCE)
Top Chord (Moving Load)
Figure 4.44: Dynamic amplification factor at mid-span of the 2D Boyne Viaduct
versus Speed (a) vertical displacement; (b) axial force in the bottom
chord; (c) axial force in the top chord.
(a)
(b)
(c)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
183
4.4.4 Braking and accelerating effects of train on the bridge
Until now, it has been assumed the train has a constant speed as it travels across the
bridge; however, utilizing the longitudinal spring elements described in Section 4.2.2,
the author is also able to simulate the braking and accelerating effects of a vehicle as
it travels along the bridge. This simulation is not possible with the ANSYS contact
element. In the following two examples, the author simulates the braking and then the
accelerating effects of a train as it crosses the Boyne Bridge. It should be noted that as
the train brakes, all the wheels of the train experience a horizontal longitudinal force
from the rail; whereas, when the train accelerates, only the wheels of the locomotive
experience the horizontal longitudinal force from the rail.
In the first two examples, it is assumed that the train is given an initial speed c of
45.55 m/s (164 km/hr) at time t = 0 sec and the moment the front wheel enters the
bridge it begins to decelerate at: (1) a = -2.075 m/s2 so that the train comes to a
complete stop after 500 m; (2) a = -1.037 m/s2 so that the train comes to a complete
stop after 1000 m (the velocity and wheel position at any time are computed using
Equation G.10). These decelerations are likely to occur when the emergency brakes are
applied to the train (Wikipedia, 2010). In the next two examples, it is then assumed
that the train begins from a stationary position, such that the front wheel is on the left
hand support at time t = 0 sec and begins to accelerate at: (3) a = 2.075 m/s2 so that
the train reaches a speed of 45.55 m/s after 500 m; (4) a = 1.037 m/s2 so that the train
reaches a speed of 45.55 m/s after 1000 m. A plot of the position of the front wheel of
the train versus the train speed is shown in Figure 4.45. The two vertical dashed lines,
shown on each plot, indicate the front wheel and rear wheel of the train arriving on the
right hand support of the bridge i.e. front wheel travels 80.77 m and 166.65 m (see
Section 3.3.3.1 for the distance between the front and rear wheel of the train used).

Chapter 4 – Sprung mass represented by time varying stiffness matrices
184
Figure 4.45: Position of the front wheel of the train versus the train speed (a) train
decelerating; (b) train accelerating
With the aid of Equation (G.10), the author has specifically computed the times when
the front wheel of the train arrives on the left-hand support, mid-span and right-hand
support of the bridge. In addition, when the front wheel has travelled 166.65 m, the
rear wheel of the train (single 201 Class locomotive and three Mark3 railway coaches)
arrives on the right hand support. These computed times are presented in Tables 4.5 to
4.8 for the four models examined.
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
185
Table 4.5: Model 1 - Train decelerating at -2.075 m/s2
Table 4.6: Model 2 - Train decelerating at -1.037 m/s2
Train decelerates from 45.55 m/s to 0 m/s over 1000 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 45.550 Front wheel of train at LHS
0.896 40.385 44.621 Front wheel of train at mid-span
1.811 80.770 43.672 Front wheel of train at RHS
3.825 166.650 41.582 Rear wheel of train at RHS
Table 4.7: Model 3 - Train accelerating at -2.075 m/s2
Train accelerates from 0 m/s to 45.55 m/s over 500 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 0.000 Front wheel of train at LHS
6.239 40.385 12.945 Front wheel of train at mid-span
8.824 80.770 18.307 Front wheel of train at RHS
12.674 166.650 26.297 Rear wheel of train at RHS
Table 4.8: Model 4 - Train accelerating at -1.037 m/s2
Train accelerates from 0 m/s to 45.55 m/s over 1000 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 0.000 Front wheel of train at LHS
8.824 40.386 9.154 Front wheel of train at mid-span
12.479 80.771 12.945 Front wheel of train at RHS
17.924 166.650 18.595 Rear wheel of train at RHS
Train decelerates from 45.55 m/s to 0 m/s over 500 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 45.550 Front wheel of train at LHS
0.905 40.385 43.672 Front wheel of train at mid-span
1.851 80.770 41.709 Front wheel of train at RHS
4.028 166.650 37.192 Rear wheel of train at RHS

Chapter 4 – Sprung mass represented by time varying stiffness matrices
186
The vertical displacement at mid-span and horizontal reaction force in the left hand
support of the bridge as a function of time for a train traversing the two-dimensional
Boyne Bridge are shown in Figure 4.46 and 4.47, respectively. For comparison
purposes, the results from the braking train (models 1 and 2) are plotted on the same
graph, while the results for the train accelerating (models 3 and 4) are also plotted on
the same graph. It should it noted that the speed c used in the dimensionless parameter
ct/L is computed by averaging the speeds given in Tables 4.5 to 4.8 for the front wheel.
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4
Dimensionless time ct /L
Dy
na
mic
co
eff
icie
nt
Model 1 - Deceleration = -2.075 m/s^2
Model 2 - Deceleration = -1.037 m/s^2
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Dimensionless time ct/L
Dy
na
mic
co
eff
icie
nt
Model 3 - Acceleration = 2.075 m/s^2 Model 4 - Acceleration = 1.037 m/s^2
Figure 4.46: Vertical displacement at mid-span of the 2D Boyne Viaduct due to
moving train (a) decelerating; (b) accelerating
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
187
-100
0
100
200
300
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4
Dimensionless time ct /L
Re
ac
tio
n F
orc
e (
kN
)
Model 1 - Deceleration = -2.075 m/s^2
Model 2 - Deceleration = -1.037 m/s^2
-150
-100
-50
0
50
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Dimensionless time ct /L
Re
ac
tio
n F
orc
e (
kN
)
Model 3 - Acceleration = 2.075 m/s^2
Model 4 - Acceleration = 1.037 m/s^2
Figure 4.47: Horizontal reaction force in the left hand support of the 2D Boyne
Viaduct due to moving train (a) decelerating; (b) accelerating
From inspection of the results, it can be seen that the vertical response of the bridge as
the train accelerates tends to be slightly greater than, the braking train, at these
particular accelerations. The horizontal response of the bridge tends to be in good
agreement with Section 4.3.9, that is, the reaction force increases significantly as each
wheel enters the bridge and then as each wheel leaves the bridge there is a sudden
drop in the force followed by a fluctuation of the results, until all wheels of the train
have exited the bridge and the reaction force oscillates about zero.
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
188
4.4.5 Three-dimensional bridge-train model
The author now examines the dynamic response of the Boyne Viaduct subjected to a
three-dimensional vehicle initially at operational speeds of 10 km/hr and 164 km/hr,
and later for a wide range of speeds. Again for comparison purposes, one compares
these results with the results for the moving loads of Section 3.3.5.3.
In Figure 4.48, a plot of the vertical displacement, axial force in the upper and lower
chord and bending moment in the mid-span of the cross-beam located at mid-span of
the bridge can be seen for the two different train speeds. Comparing the results in
Figure 4.48 with results in Figure 4.41, the reader can see that the two-dimensional
bridge response is remarkably similar to the three-dimensional bridge response.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
3D Boyne - 3D Train at 10 km/hr
3D Boyne - 3D Train at 164 km/hr
Figure 4.41a - 2D Train at 164 km/hr
-1.2
-0.9
-0.6
-0.3
0.0
0.3
0.6
0.9
1.2
1.5
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
3D Boyne - 3D Train at 10 km/hr
3D Boyne - 3D Train at 164 km/hr
Figure 4.41b - 2D Train at 164 km/hr
(a)
(b)
Bottom chord
Top chord

Chapter 4 – Sprung mass represented by time varying stiffness matrices
189
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Be
nd
ing
mo
me
nt
co
eff
icie
nt 3D Boyne - 3D Train at 10 km/hr
3D Boyne - 3D Train at 164 km/hr
Figure 4.48: (a) Vertical displacement; (b) axial force; (c) bending moment of the
cross-beam located at mid-span of the 3D Boyne Viaduct due to a
three-dimensional vehicle traversing at 10 km/hr and 164 km/hr
Next, the author examines the vertical acceleration of the vehicle as it travels as
shown in Figure 4.49. From inspection of Figure 4.49, it can be seen that the vertical
acceleration or riding comfort of the locomotive (V1) and first railway coach (V2) lie
within the recommended value of 1.0 m/s2, on most occasions, as required by
Eurocodes (1990). Figure 4.49 shows that the three-dimensional locomotive (V1)
tends to be slightly more responsive than its two-dimensional counterpart, while the
responses of both types of railway coaches models (V2) behave quite similarly.
-1.50
-1.00
-0.50
0.00
0.50
1.00
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
3D Train - 164 km/hr (V1) 3D Train - 164 km/hr (V2)
2D Train - 164 km/hr (V1) 2D Train - 164 km/hr (V2)
Figure 4.49: Vertical acceleration (riding comfort value) of the vehicle bodies
(c)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
190
The contact forces between the front wheel of the locomotive and the rail and the
front wheel of the first railway coach i.e. the 1st and 7
th wheel of the train and the rail
are shown in Figure 4.50. Like the contact force in the two-dimensional counterpart,
as each wheel enter the bridge or immediately after they leave the bridge (arrives on
the rigid rail), the contact force between the wheel and rail tends to oscillate abruptly,
gradually reducing in time. In addition, it can be seen that the front wheel of the first
railway coach i.e. the seventh wheel of the train, loses contact with the rail as it enters
the bridge. Nonetheless, wheel-rail separation for the 7th
wheel is brief and the contact
force grows as this wheel travels along the bridge. Figure 4.50 shows that wheel-rail
separation of the railway carriage wheels can be more susceptible at higher speed
when entering a bridge structure because the bridge can be experiencing free vibration
or periodic oscillations generated by other wheels already on the bridge.
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
tht
3D Train - 164 km/hr (W1)
3D Train - 164 km/hr (W7)
Figure 4.50: Contact force between the 1st and 7
th wheel and the rail
To finish, the author investigates the dynamic response of the three-dimensional
Boyne Bridge subjected to a locomotive and several railway carriages travelling at a
realistic range of speeds, 0 0.165,α< < which is equivalent to 0 km/hr to 300 km/hr.

Chapter 4 – Sprung mass represented by time varying stiffness matrices
191
The dynamic amplification factors are presented Figure 4.51. It can be seen from
Figure 4.51a that the dynamic amplification factors DAFU and DAFA of the three-
dimensional structure are quite similar to that of its two-dimensional counter-part at
lower speeds, varying somewhat at higher speeds. In addition, it can be seen that the
dynamic behaviour of the bridge tends to be significantly larger for the moving forces
when compared to the bridge response for two-dimensional and three-dimensional
vehicle models.
1.00
1.02
1.04
1.06
1.08
1.10
1.12
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
3D Boyne (3D Train using WRC)
2D Boyne (2D Train using WRC)
3D Boyne (Moving Load)
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Bot Chord (3D Train using WRC)
Bot Chord (2D Train using WRC)
Top Chord (3D Train using WRC)
Top Chord (2D Train using WRC)
Figure 4.51: Dynamic amplification factor at mid-span of the 3D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force
(a)
(b)

Chapter 4 – Sprung mass represented by time varying stiffness matrices
192
4.4.6 Effects of lateral cross winds on the train as it travels
As a final section, the author utilizes the lateral spring element described in Section
4.2.3 by briefly examining the effects of a lateral cross wind on a moving train. This
section demonstrates the effectiveness of the lateral spring elements. However, the
aerodynamic action of the wind as a train travels goes beyond the scope of this thesis.
Nevertheless, Xu & Ding (2006) remark that wind forces can have significant effects
on the vehicle responses, especially in the lateral direction. Other studies of train
aerodynamics can be found in Chiu (1995) and Rangunathan et al. (2002). In Figure
4.52, the author shows a train exposed to a lateral cross wind pressure, while it travels
at a constant speed along the track.
Figure 4.52: Train exposed to a lateral cross wind pressure
Using the same three-dimensional vehicle properties of Section 4.4.5, the author
assumes that the train is travelling, along rigid rails, at a constant speed c of 45.55 m/s
(164 km/hr). The train is then exposed to a lateral cross wind pressure of 1.0 kN/m2
for a brief moment (0.95secs), before it dissipates to zero. In this example, time t is
arranged in such a manner that it takes 0.05 sec before the train is exposed to the cross
wind, then between the times 0.05 sec to 1.00 sec, the train experiences a positive
lateral pressure of 1.0 kN/m2, while beyond 1.00 sec, the lateral pressure returns to
zero. In Figure 4.53, a plot of the lateral displacement as a function of time for the 1st
and 7th
wheels of the train is plotted, while the lateral acceleration experienced by the
c
lateral wind pressure

Chapter 4 – Sprung mass represented by time varying stiffness matrices
193
vehicle body of the locomotive (V1) and first railway coach (V2) are shown in Figure
4.54. One can see a noticeable lateral shift as the pressure is applied followed by free
vibration when removed in Figures 4.53 and 4.54.
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Time (sec)
La
tera
l d
isp
lac
me
nt
(mm
)
3DTrain - 164 km/hr (W1)
3DTrain - 164 km/hr (W7)
Figure 4.53: Lateral displacement of the 1st and 7
th wheel of the train
Figure 4.54: Lateral acceleration experienced by the vehicle bodies of the train
Lateral pressure applied
Lateral pressure removed

Chapter 4 – Sprung mass represented by time varying stiffness matrices
194
4.5 Discussion of results and Conclusions
The main purpose of this chapter is the development and validation of the author’s
wheel-rail contact (WRC) elements. This system can be seen as an extension to
Chapter 3. Here the moving point force is replaced by a Hertzian spring. Additionally,
the author develops longitudinal and lateral springs to simulate the braking,
accelerating and lateral effects of passing trains. These additional features are current
unavailable for the ANSYS contact elements.
Examining the results presented in Section 4.3.1 to 4.3.5, the reader can see that the
WRC element and the ANSYS contact elements have similar results. In Section 4.3.2
and 4.3.5, it can be seen that both sprung wheel systems (WRC element and ANSYS
contact elements) can undergo a zero contact force, thus wheel-rail separation occurs;
nonetheless, as contact is re-established with the beam there is a large compressive
contact force experienced by the wheel. Section 4.3.6 then shows that a moving
sprung system can generate the same results as a moving unsprung system provided
that one uses reasonably large Hertzian spring stiffness between the wheel and rail,
especially at higher speed. One weakness of the ANSYS contact element method is
exposed in Section 4.3.7, which shows a loss of accuracy in the results as the number
of beam elements in the model decreases. However, this is not the case for the WRC
element, which maintain the correct solution. Additionally, Section 4.3.9 examines
the effects of braking on the bridge. This is also not possible using the ANSYS
contact elements. The results for the vertical response of the bridge and vehicle are in
good agreement with the results from the literature, while the results for the horizontal
response are also good and obey Newton’s second law of motion i.e. .F Ma=

Chapter 4 – Sprung mass represented by time varying stiffness matrices
195
Next using the developed WRC element, the author analyses the dynamic response of
the Boyne Viaduct railway bridge subjected to a single sprung wheel as well as to an
entire train consisting of a single six-axle locomotive and three four-axle railway
coaches. Each railway vehicle is modelled using lumped masses for the wheels,
elastic beam elements for the bogies and vehicle body, which are separated using
spring-dashpot elements, which were used to represent the primary and secondary
suspensions. The results for the single sprung wheel compare well with the results for
the moving load model, especially at low speeds 0.2α ≤ in the parametric study. At
realistic vehicle speeds the DAF results for the sprung wheel tend to be slightly larger
than the DAF results for the moving load due to its additional wheel inertia. This is
not the case for the two-dimensional and three-dimensional train models, which have
significantly lower dynamic amplification factors than the DAF for the multiple
moving loads. In all cases, the DAF experienced by the Boyne Viaduct never exceeds
1.1 at the range of speeds for this particular train type. Furthermore, the vertical
acceleration or riding comfort value of the railway coaches, travelling at a speed of
200 km/hr across the bridge, tend to lie below the recommended value of 1.0 m/s2
recommended in Eurocodes (1990).
Unlike the WRC element that uses rigid rails, the ANSYS contact element method
must use additional beam elements to the left and right of the bridge to support the
train as it enters and leaves the bridge structure, which means it requires additional
contact elements in the model. The braking and accelerating effects of a train as it
travels along the Boyne Viaduct, as presented in Section 4.4.4, are in good agreement
with the literature. Specifically, the reaction force increases significantly as each
wheel enters the bridge and then as each wheel leaves the bridge there is a sudden

Chapter 4 – Sprung mass represented by time varying stiffness matrices
196
drop in the force followed by a fluctuation of the results, until all wheels of the train
have exited the bridge and the reaction force oscillates about zero. For demonstration
purposes, the lateral spring element developed in Section 4.2.3 is used in Section 4.4.6
to provide lateral support to the wheels of the train, as the moving train is exposed to
lateral cross wind effects.
As a final note, it can be concluded that the WRC element is exceedingly robust in
capturing the dynamic response of both the bridge and vehicle. Additionally, one has
shown that the WRC element is comparable to, if not better than the commercial node-
to-surface contact elements in ANSYS. The WRC element can also model
irregularities. This is presented in Chapter 6.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
197
Chapter 5
Moving unsprung mass represented by time varying
mass, damping, and stiffness matrices within a
modal and finite element framework
5.1 Introduction
As shown in the previous chapter, the sprung mass system is greatly influenced by the
Hertzian spring stiffness to the extent that large spring stiffness can cause the ANSYS
finite element program to become unstable during the transient analyses. However,
modelling the wheels of the train as moving unsprung masses can eliminate this
problem, where the Hertzian spring stiffness, kH, is infinite. In this chapter, the author
develops both a modal method as well as a finite element method for simulating a
moving unsprung mass traversing a bridge within the ANSYS framework.
When one deals with the moving unsprung mass its vertical position must be the same
as the vertical position of a point of the beam directly underneath. However, since the
moving unsprung mass is moving horizontally, its vertical velocity is not the same as
the vertical velocity of the point of the beam directly underneath, (which we will call

Chapter 5 – Moving unsprung mass within a modal and finite element framework
198
the local vertical velocity of the beam). In fact the vertical velocity of the moving
unsprung mass is equal to the local vertical velocity of the beam plus a convective
term. Furthermore, the vertical acceleration of the moving unsprung mass is equal to
the local vertical acceleration of the beam plus an additional convective term. Biggs
(1964) and Akin & Mofid (1989) present a moving unsprung model in which the
convective velocity and acceleration are omitted from the model; thus their solution is
inaccurate. This inaccuracy is overcome in the author’s study by including both the
local and convective terms for the moving unsprung mass.
This chapter considers the differential equation governing the vibration of a beam
subjected to the moving unsprung wheel and deriving a modal model with both the
local and convective acceleration of the unsprung mass taken into account. The use of
beam modes reduces the complexity of the solution. Next, the finite element method
for the moving unsprung mass is developed. This is different from the development of
the WRC element in Chapter 4. In this chapter additional mass, stiffness and damping
matrices are added to the beam matrix, whereas only additional stiffness matrices
were required in the WRC element. This chapter also highlights the similarities and
differences between the modal and finite element models from the point of view of
the form of the final matrices. The weighting and shape functions of the finite element
method play the same role as the mode shapes in the modal method. The difference
between the two methods occurs in the representation of the stiffness matrix.
Integration by parts gives the finite element stiffness matrix a different form from the
modal stiffness matrix. Additionally, the second derivatives of the beam element
shape functions are discontinuities in the finite element method.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
199
In order to validate the modal and finite element models, the author compares results
with results from the literature as well as with results from use of the WRC element in
Chapter 4. In the WRC case, the Hertzian spring is given a reasonably large stiffness
and the moving sprung wheel is not allowed to lose contact with the beam i.e. no
separation. Additionally, this chapter highlights and quantifies the effects of omitting
the convective acceleration terms from an unsprung moving mass model as the results
obtained here are very different from Akin & Mofid’s (1989) results. Nevertheless,
many authors are still comparing the results of their models with this inaccurate
solution, ignoring the issue of convective acceleration (Bowe and Mullarkey, 2008).
Following the validation of both unsprung systems the author continues to investigate
the dynamic response to a single unsprung wheel and to multiple unsprung wheels
traversing the Boyne Viaduct and compares these responses with the responses to the
sprung wheel systems in Chapter 4 as well as with the responses to the moving loads
examined in Chapter 3.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
200
5.2 Development of the unsprung wheel system
5.2.1 Modal superposition model incorporating a moving unsprung mass
The author begins by developing the modal superposition model for a moving
unsprung wheel Mw traversing a beam at a constant speed as presented in Figure 5.1.
Figure 5.1: Moving unsprung wheel traversing a beam
The differential equation governing the vibration of a beam subjected to the moving
unsprung wheel mass can be expressed as:
( ) ( )( )
4 2
4 2
, ,v x t v x tEI m p x
x t
∂ ∂+ =
∂ ∂ (5.1a)
whereby
( ) ( ) ( )( )p x F t x X tδ= − − (5.1b)
where ( )F t is the force imparted to moving unsprung mass by the beam, positive if
acting in the positive y-direction, the Dirac Delta function is represented byδ and the
position vector of the moving point mass is as follows:
( ) ( ) ( )t X t Y t= +p i j (5.2)
z, k
x, i
y, v, j
0
m, EI
( )dX tc
dt=
L
Mw

Chapter 5 – Moving unsprung mass within a modal and finite element framework
201
where i and j are the unit vector in the x and y direction, respectively. The horizontal
speed c of the moving mass, as shown in Figure 5.1, is:
( )dX tc
dt= (5.3)
The equation of motion for the moving mass in the y-direction is given as:
( )( )
2
2w w
d Y tM M g F t
dt= − + (5.4)
where g is the acceleration due to gravity. Eliminating ( )F t in Equation (5.1) using
(5.4) gives the following:
( ) ( ) ( )( )( )
4 2 2
4 2 2
, ,w w
v x t v x t d Y tEI m M M g x X t
x t dtδ
∂ ∂+ = − − −
∂ ∂ (5.5)
Since the moving mass is always in contact with the beam, the constraint equation is:
( ) ( )( )
,x X t
Y t v x t=
= (5.6)
Therefore the vertical velocity of the moving mass is as follows:
( ) ( )( )
( )( )
( ), ,x X t x X t
dY t v x t v x t dX t
dt t x dt= =
∂ ∂= +
∂ ∂ (5.7)
convective velocity

Chapter 5 – Moving unsprung mass within a modal and finite element framework
202
Furthermore the vertical acceleration of the moving mass is
( ) ( )( )
2 2
2 2
,x X t
d Y t v x t
dt t=
∂=
∂
( )( )
( ) ( )( )
( ) ( ) ( )( )
( )2 2 2
2 2
, , ,2
x X t x X t x X t
v x t dX t v x t dX t dX t v x t d X t
x t dt x dt dt x dt= = =
∂ ∂ ∂+ + +
∂ ∂ ∂ ∂ (5.8)
Substituting Equation (5.8) into (5.5) yields
( ) ( ) ( )( )
( )( )
( )4 2 2 2
4 2 2
, , , ,2
w x X t x X t
v x t v x t v x t v x t dX tEI m M
x t t x t dt= =
∂ ∂ ∂ ∂+ = − + +
∂ ∂ ∂ ∂ ∂
( )( )
( ) ( ) ( )( )
( )( )( )
2 2
2 2
, ,x X t x X t
v x t dX t dX t v x t d X tg x X t
x dt dt x dtδ
= =
∂ ∂+ + −
∂ ∂ (5.9)
In order to solve Equation (5.9), one uses the method of modal superposition;
whereby ( ),v x t can be represented according to Biggs (1964) as follows:
( ) ( ) ( )1
,N
n n
n
v x t r t xφ=
=∑ (5.10)
where ( )n xφ is the n-th characteristic shape as defined in Appendix C, and ( )nr t is
the n-th function of time which has to be calculated.
Substituting Equation (5.10) into (5.9) gives the following ordinary differential
equation governing ( )nr t , n = 1, 2, 3, … N.
convective acceleration

Chapter 5 – Moving unsprung mass within a modal and finite element framework
203
( ) ( ) ( ) ( ) ( ) ( )( )1 1 1
N N Niv
n n n n w n n
n n n
EI r t x m r t x M r t X tφ φ φ= = =
+ = −
∑ ∑ ∑&& &&
( )( ) ( )( )
( )( ) ( )( )
2
1 1
2N N
n n n n
n n
dX t dX tr t X t r t X t
dt dtφ φ
= =
′ ′′+ +
∑ ∑&
( )( ) ( )( ) ( )( )
2
21
N
n n
n
d X tr t X t g x X t
dtφ δ
=
′+ + −
∑ (5.11)
where a dot over ( )nr t represents a derivative with respect to time, and a dash over
( )n xφ represents a derivative with respect to x. Substituting Equation (C.7) and
(C.12b) into Equation (5.11) to eliminate the fourth derivative of ( )n xφ gives the
following:
( ) ( ) ( ) ( ) ( ) ( )( )4
1 1 1
N N N
n n n n n w n n
n n n
EI r t a x m r t x M r t X tφ φ φ= = =
+ = −
∑ ∑ ∑&& &&
( )( ) ( )( )
( )( ) ( )( )
2
1 1
2N N
n n n n
n n
dX t dX tr t X t r t X t
dt dtφ φ
= =
′ ′′+ +
∑ ∑&
( )( ) ( )( ) ( )( )
2
21
N
n n
n
d X tr t X t g x X t
dtφ δ
=
′+ + −
∑ (5.12)
Multiplying both sides of Equation (5.12) by ( )i xφ , i = 1, 2, 3, … N, integrating
along the beam length, and using Equation (C.21) and (C.22) gives the following:
( ) ( ) ( ) ( )( )4
1 1 1
N N N
n n in n in w n n
n n n
EI r t a L m r t L M r t X tδ δ φ= = =
+ = −
∑ ∑ ∑&& &&
( )( ) ( )( )
( )( ) ( )( )
2
1 1
2N N
n n n n
n n
dX t dX tr t X t r t X t
dt dtφ φ
= =
′ ′′+ +
∑ ∑&
( )( ) ( )( ) ( )( )
2
21
, = 1, 2, 3, ...N
n n i
n
d X tr t X t g X t i N
dtφ φ
=
′+ +
∑ (5.13)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
204
where 1in
δ = when i n= , and 0in
δ = when i n≠ . Rearranging Equation (5.13) in the
order of the mass, damping and stiffness terms with the forcing term on the right-hand
side gives the following:
( )( ) ( )( ) ( )1
N
in w i n n
n
mL M X t X t r tδ φ φ=
+∑ &&
( )( )( ) ( )( ) ( )
1
2N
w i n n
n
dX tM X t X t r t
dtφ φ
=
′+
∑ &
( )( )( ) ( )( )
2
4
1
N
in n w i n
n
dX tEIL a M X t X t
dtδ φ φ
=
′′+ +
∑
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t r t
dtφ φ
′+
( )( ), = 1, 2, 3, ...w iM g X t i Nφ= − (5.14)
Since Akin & Mofid (1989) only include the local accelerations of the moving
unsprung mass, terms containing ( )dX t dt and ( )2 2d X t dt are omitted from their
model. Expanding Equation (5.14) into matrix form gives:
1
2
3
1 0 0 ... 0
0 1 0 ... 0
0 0 1 ... 0
...... ... ... ... ...
0 0 0 ... 1 N
r
r
mL r
r
&&
&&
&&
&&
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
r
M r
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
+
&&
&&
&&
&&
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
2 ...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
&
&
&
&
411
422
433
4
0 0 ... 0
0 0 ... 0
0 0 ... 0
...... ... ... ... ...
0 0 0 ... NN
ra
ra
EIL ra
ra
+

Chapter 5 – Moving unsprung mass within a modal and finite element framework
205
( )
1 1 1 2 1 3 1 1
2 2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′
′′ ′′ ′′ ′′ + ′′ ′′ ′′ ′′
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 22
3 1 3 2 3 3 3 32
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rd X t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
1
2
3
...
w
N
M g
φ
φ
φ
φ
= −
(5.15)
5.2.1.1 Modal superposition model of a moving unsprung load
Should one be only interested in the gravitational effects of a moving unsprung mass
i.e. a moving load, then the inertia effects of the moving unsprung mass can be
eliminated. This reduces Equation (5.15) to the following decoupling form:
1
2
3
1 0 0 ... 0
0 1 0 ... 0
0 0 1 ... 0
...... ... ... ... ...
0 0 0 ... 1 N
r
r
mL r
r
&&
&&
&&
&&
411
422
433
4
0 0 ... 0
0 0 ... 0
0 0 ... 0
...... ... ... ... ...
0 0 0 ... NN
ra
ra
EIL ra
ra
+
1
2
3
...
w
N
M g
φ
φ
φ
φ
= −
(5.16)
5.2.1.2 Unsprung wheel-rail separation
Despite being problematic, the author’s model can allow the unsprung wheel to
separate from the rail when the interaction between the wheel and the rail ceases to be
compressive, Equations (5.4) and (5.6) can be rewritten as:
( )( )2
2w w
d Y tF t M g M
dt= + (5.17a)
and

Chapter 5 – Moving unsprung mass within a modal and finite element framework
206
( ) ( )( )
,x X t
Y t v x t=
= (5.17b)
where ( )F t is the force imparted to the moving unsprung mass by the beam, positive
if acting in the positive y-direction. Equation (5.17b) is the constraint whereby the
unsprung wheel is in contact with the beam. The wheel is in contact with the rail
when ( )F t is positive, and separates from the rail when ( )F t becomes zero, when
the equation of motion of the unsprung wheel becomes:
( )2
20
w w
d Y tM g M
dt= + (5.17c)
At this stage, the constraint equation (5.17b) ceases to apply. It is replaced by the
separation distance d as follows:
( ) ( )( )
,x X t
d Y t v x t=
= − (5.17d)
During separation, Equation (5.17d) must be computed at every time-step in order to
track the vertical position of the unsprung wheel. The wheel remains separated from
the beam, while d is positive. When d becomes equal to zero, separation ceases, at
which time the constraint equation (5.17b) applies once again. Nevertheless, at the
instant the wheel regains contact with the beam; the beam is likely to experience a
large impact load from the wheel. In order to prevent this impact load, the author
would need to have a spring underneath the wheel, for a couple of time steps, so that
the wheel could regain contact with the beam at a gradual rate. However, this then
becomes a sprung wheel, which has been already developed in Chapter 4.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
207
5.2.2 Finite element model incorporating the unsprung moving mass
The author now develops a finite element solution for the unsprung moving mass. In
Figure 5.2, the reader can see a free-body diagram of an unsprung wheel traversing a
beam element representing part of the bridge. The diagram indicates the coordinate
system where x is positive along the beam element, y is positive upward and z is
positive outwards. The origin of the coordinate system is at local node 1 of the beam.
For two-dimensional problems, the deflection in the y-direction and rotation about the
z-axis are defined by R1 and R2 at local node 1 of the beam, respectively, while R3 and
R4 are the deflection in the y-direction and rotation about the z-axis at local node 2 of
the beam. It should be noted that the author has intentionally redefined the nodal
displacement terms in this section so that the form of the finite element equations can
be compared with the form of the modal equations in Section 5.2.1.
Figure 5.2: Moving unsprung wheel traversing a beam element
Additionally, Equation (4.3) with a change of notation, computes the vertical
displacement at any point along the beam as follows:
( ) ( )4
1
, ( )n n
n
v x t R t x=
= Φ∑ (5.18)
R1 R3
R2
R4 z
x
y
0
m, EI
( )dX tc
dt=
Mw 1 2

Chapter 5 – Moving unsprung mass within a modal and finite element framework
208
where ( )1 1( )x N xΦ = , ( )2 1( )x G xΦ = , ( )3 2( )x N xΦ = , and ( )4 2( )x G xΦ = which are
defined by Equation (B.8) and plotted in Figure B.3 in Appendix B.
Substituting Equation (5.18) into (5.9) gives the following equation:
( ) ( ) ( ) ( )4 4
1 1
iv
n n n n
n n
EI R t x m R t x= =
Φ + Φ∑ ∑ &&
( ) ( )( )( )
( ) ( )( )4 4
1 1
2w n n n n
n n
dX tM R t X t R t X t
dt= =
′= − Φ + Φ
∑ ∑&& &
( )( ) ( )( )
( )( ) ( )( ) ( )( )
2 24 4
21 1
n nn n n
n n
dX t d X tR t X t R t X t g x X t
dt dtδ
= =
′′ ′+ Φ + Φ + −
∑ ∑ (5.19)
In order to apply Galerkin’s method of weighted residuals we multiply both sides of
Equation (5.19) by ( )i
xΦ , i = 1, 2, 3 and 4, and integrate along the element length;
( ) ( ) ( ) ( )4 4
1 10 0
( ) ( )
l l
iv
i n n i n n
n n
EI x x dxR t m x x dxR t= =
Φ Φ + Φ Φ =∑ ∑∫ ∫ &&
( )( ) ( )( )
( )( ) ( )4 4
1 10
( ) 2
l
w i n n n n
n n
dX tM x X t R t X t R t
dt= =
′= − Φ Φ + Φ
∑ ∑∫ && &
( )( )( ) ( )
( )( )( ) ( ) ( )( )
2 24 4
21 1
nn n n n
n n
dX t d X tX t R t X t R t g x X t dx
dt dtδ
= =
′′ ′+ Φ + Φ + −
∑ ∑ (5.20)
or
( ) ( )( ) ( )( ) ( )4
1 0
( )
l
i n w i n n
n
m x x dx M X t X t R t=
Φ Φ + Φ Φ +
∑ ∫ &&
( )( )( ) ( )( ) ( )
4
1
2w i n n
n
dX tM X t X t R t
dt=
′Φ Φ +
∑ &
( ) ( )( )
( )( ) ( )( )2
4
1 0
l
iv
i n w i nn
n
dX tEI x x dx M X t X t
dt=
′′Φ Φ + Φ Φ +
∑ ∫

Chapter 5 – Moving unsprung mass within a modal and finite element framework
209
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t R t
dt
′Φ Φ
( )( ) , = 1, 2, 3, and 4w iM g X t i= − Φ (5.21)
The term ( ) ( )0
l
iv
i nx x dxΦ Φ∫ is now integrated by parts twice giving:
( ) ( ) ( ) ( ) ( ) ( )0
0 0
l lliv
i n i n i nx x dx x x x x dx′′′ ′ ′′′Φ Φ = Φ Φ − Φ Φ∫ ∫
( ) ( ) ( ) ( ) ( ) ( )0 0
0
ll l
i n i n i nx x x x x x dx′′′ ′ ′′ ′′ ′′= Φ Φ − Φ Φ + Φ Φ∫
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )0
00
l
i n i n i n i n i nl lx x x x x x x x x x dx′′′ ′′′ ′ ′′ ′ ′′ ′′ ′′= Φ Φ − Φ Φ − Φ Φ + Φ Φ + Φ Φ∫
(5.22)
Equation (5.22) implies the following:
( ) ( ) ( )4
1 0
l
iv
i n n
n
EI x x dxR t=
Φ Φ =∑ ∫
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )4
001
i n i n i n i nl ln
EI x x x x x x x x=
′′′ ′′′ ′ ′′ ′ ′′Φ Φ − Φ Φ − Φ Φ + Φ Φ∑
( ) ( ) ( )0
l
i n nx x dx R t′′ ′′+ Φ Φ∫ (5.23)
By means of Equation (A.16) and (A.19), Equation (5.23) becomes:
( ) ( ) ( )4
1 0
l
iv
i n n
n
EI x x dxR t=
Φ Φ =∑ ∫
( ) ( ) ( ) ( )00
i i i il lx Q x Q x M x M′ ′−Φ + Φ − Φ + Φ ( ) ( ) ( )
4
1 0
l
i n n
n
EI x x dxR t=
′′ ′′+ Φ Φ∑ ∫ (5.24)
Substituting Equation (B.1) into (5.24) gives:
( ) ( ) ( )4
1 0
l
iv
i n n
n
EI x x dxR t=
Φ Φ =∑ ∫

Chapter 5 – Moving unsprung mass within a modal and finite element framework
210
( ) ( ) ( ) ( ) ( ) ( ) ( )4
2 1 2 1
1 0
ˆ ˆ ˆ ˆ0 0
l
i i i i i n n
n
l Q Q l M M EI x x dxR t=
′ ′ ′′ ′′−Φ − Φ − Φ − Φ + Φ Φ∑ ∫ (5.25)
Substituting Equation (5.25) into (5.21) gives the following equation as:
( ) ( )( ) ( )( ) ( )4
1 0
( )
l
i n w i n n
n
m x x dx M X t X t R t=
Φ Φ + Φ Φ +
∑ ∫ &&
( )( )( ) ( )( ) ( )
4
1
2w i n n
n
dX tM X t X t R t
dt=
′Φ Φ +
∑ &
( ) ( )( )
( )( ) ( )( )2
4
1 0
l
i n w i nn
n
dX tEI x x dx M X t X t
dt=
′′ ′′ ′′Φ Φ + Φ Φ +
∑ ∫
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t R t
dt
′Φ Φ
( )( ) ( ) ( ) ( ) ( )1 2 1 2ˆ ˆ ˆ ˆ0 0 , = 1, 2, 3, and 4
w i i i i iM g X t Q l Q M l M i′ ′= − Φ + Φ + Φ + Φ + Φ (5.26)
Expanding Equation (5.26) into matrix form gives:
1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41 1
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42 2
3 1 3 2 3 3 3 4 3 1 3 2 3 3 3 430
4 1 4 2 4 3 4 4 4 1 4 2 4 3 4 44
l
w
R R
R Rm dx M
R
R
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ +
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ
∫
&& &&
&& &&
&& &
&&
3
4
R
R
&
&&
( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
3 1 3 2 3 3 3 4 33
4 1 4 2 4 3 4 4 4
2w
R
dX t RM EI
dt R
R
′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′ ′ ′ ′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
&
&
&
&
1
2
1 3 2 3 3 3 4 30
4 1 4 2 4 3 4 4 4
l
R
Rdx
R
R
′′ ′′ ′′ ′′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
∫
( ) ( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 2
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
2
3 1 3 2 3 3 3 4 3 13
4 1 4 2 4 3 4 4 4
w w
R
RdX t d X tM M
Rdt dt
R
′′ ′′ ′′ ′′ ′ ′ ′ ′ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ′′ ′′ ′′ ′′ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′′ ′′ ′′ ′′ ′ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
1
2
3 2 3 3 3 4 3
4 1 4 2 4 3 4 4 4
R
R
R
R
′ ′ ′ Φ Φ Φ Φ Φ Φ
′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
1 1 1 11
2 2 2 22
1 2 1 2
3 3 3 33
4 4 4 44
0 0
0 0ˆ ˆ ˆ ˆ
0 0
0 0
w
l l
l lM g Q Q M M
l l
l l
′ ′Φ Φ Φ Φ Φ ′ ′Φ Φ Φ ΦΦ
= − + + + + ′ ′Φ Φ Φ ΦΦ
′ ′Φ Φ Φ ΦΦ
(5.27)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
211
With the aid of Figure B.3, Equation (5.27) reduces to the following:
1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41 1
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42 2
3 1 3 2 3 3 3 4 3 1 3 2 3 3 3 430
4 1 4 2 4 3 4 4 4 1 4 2 4 3 4 44
l
w
R R
R Rm dx M
R
R
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ +
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ
∫
&& &&
&& &&
&& &
&&
3
4
R
R
&
&&
( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
3 1 3 2 3 3 3 4 33
4 1 4 2 4 3 4 4 4
2w
R
dX t RM EI
dt R
R
′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′ ′ ′ ′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
&
&
&
&
1
2
1 3 2 3 3 3 4 30
4 1 4 2 4 3 4 4 4
l
R
Rdx
R
R
′′ ′′ ′′ ′′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
∫
( ) ( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 2
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
2
3 1 3 2 3 3 3 4 3 13
4 1 4 2 4 3 4 4 4
w w
R
RdX t d X tM M
Rdt dt
R
′′ ′′ ′′ ′′ ′ ′ ′ ′ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ′′ ′′ ′′ ′′ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′′ ′′ ′′ ′′ ′ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
1
2
3 2 3 3 3 4 3
4 1 4 2 4 3 4 4 4
R
R
R
R
′ ′ ′ Φ Φ Φ Φ Φ Φ
′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
1
2
1 2 1 2
3
4
1 0 0 0
0 0 1 0ˆ ˆ ˆ ˆ0 1 0 0
0 0 0 1
wM g Q Q M M
Φ Φ
= − + + + + Φ Φ
(5.28)
Comparing Equation (5.15) with (5.28), one can clearly see that the modal equation is
remarkably similar to the finite element equation apart from the representation of the
stiffness matrix and the nodal forces, 1 2 1 2ˆ ˆ ˆ ˆ, , and Q Q M M ; moreover, during the finite
element assembly Newton’s Third Law eliminates these forces at internal nodes
(Bowe & Mullarkey, 2008). In addition, the weighting and shape functions of the
finite element model play a similar role as the mode shapes play in the analytical
numerical solution. The difference between the two models occurs in the
representation of the stiffness matrix. Integration by parts gives the finite element
stiffness matrix a different form to the modal stiffness matrix. Furthermore, the
second derivatives of the beam element shape functions are discontinuous in the finite
element model.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
212
5.2.3 Modal superposition for multiple unsprung masses traversing a beam
In this sub-section, the author expands the single moving unsprung mass to several
moving masses traversing a beam. Recalling Equation (5.11), the equation of motion
for a single moving unsprung mass crossing a beam can be rewritten as follows:
( ) ( ) ( ) ( ) ( ) ( )( )1 1 1
N N Niv
n n n n w n n
n n n
EI r t x m r t x M r t X tφ φ φ= = =
+ = −
∑ ∑ ∑&& &&
( )( ) ( )( )
( )( ) ( )( )
2
1 1
2N N
n n n n
n n
dX t dX tr t X t r t X t
dt dtφ φ
= =
′ ′′+ +
∑ ∑&
( )( ) ( )( ) ( )( )
2
21
N
n n
n
d X tr t X t g x X t
dtφ δ
=
′+ + −
∑ (5.29)
For several wheels, ( )X t will denote the horizontal position of the front wheel of
train; hence, the position of the m-th wheel, of the k-th bogie, of the j-th carriage of
the train and is equal to ( ) ( ) ( ) ( )1 1 1 ,w w w
X t D j B k A m− − − − − − where ( ) .X t ct=
Updating Equation (5.29) for several moving unsprung masses then gives:
( ) ( ) ( ) ( )1 1
N Niv
n n n n
n n
EI r t x m r t xφ φ= =
+ =∑ ∑ &&
( ) ( ) ( ) ( ) ( ) ( )( )2 2
, ,1 1 1 1
1 1 1cN N
n n w w ww j k m
j k m n
M r t X t D j B k A mφ= = = =
− − − − − − −
∑∑∑ ∑ &&
( )( ) ( ) ( ) ( ) ( )( )
1
2 1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑ &
( )( ) ( ) ( ) ( ) ( )( )
2
1
1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′′+ − − − − − −
∑
( )( ) ( ) ( ) ( ) ( )( )
2
21
1 1 1N
n n w w w
n
d X tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑
] ( ) ( ) ( ) ( )( )1 1 1w w wg x X t D j B k A mδ+ − + − + − + − (5.30)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
213
where ( ), ,w j k mM is the unsprung mass of the m-th wheel, of the k-th bogie, of the j-th
carriage of the train. With the aid of Equations (3.40a) and (3.40b), the m-th wheel, of
the k-th bogie, of the j-th carriage of the train is only on the beam between the times
( ) ( ) ( )1 1 1w w w
D j B k A m
c
− + − + − to
( ) ( ) ( )1 1 1.
w w wL D j B k A m
c
+ − + − + − Following
a similar methodology to Section 5.2.1, Equations (C.7) and (C.12b) are substituted
into Equation (5.30) to eliminate the fourth derivative of ( )n xφ giving:
( ) ( ) ( ) ( )4
1 1
N N
n n n n n
n n
EI r t a x m r t xφ φ= =
+ =∑ ∑ &&
( ) ( ) ( ) ( ) ( ) ( )( )2 2
, ,1 1 1 1
1 1 1cN N
n n w w ww j k m
j k m n
M r t X t D j B k A mφ= = = =
− − − − − − −
∑∑∑ ∑ &&
( )( ) ( ) ( ) ( ) ( )( )
1
2 1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑ &
( )( ) ( ) ( ) ( ) ( )( )
2
1
1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′′+ − − − − − −
∑
( )( ) ( ) ( ) ( ) ( )( )
2
21
1 1 1N
n n w w w
n
d X tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑
] ( ) ( ) ( ) ( )( )1 1 1w w wg x X t D j B k A mδ+ − + − + − + − (5.31)
Multiplying both sides of Equation (5.31) by ( )i xφ , i = 1, 2, 3, … N, integrating
along the beam length, and using Equation (C.21) and (C.22) gives the following:
( ) ( )4
1 1
N N
n n in n in
n n
EI r t a L m r t Lδ δ= =
+ =∑ ∑ &&
( ) ( ) ( ) ( ) ( ) ( )( )2 2
, ,1 1 1 1
1 1 1cN N
n n w w ww j k m
j k m n
M r t X t D j B k A mφ= = = =
− − − − − − −
∑∑∑ ∑ &&
( )( ) ( ) ( ) ( ) ( )( )
1
2 1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑ &

Chapter 5 – Moving unsprung mass within a modal and finite element framework
214
( )( ) ( ) ( ) ( ) ( )( )
2
1
1 1 1N
n n w w w
n
dX tr t X t D j B k A m
dtφ
=
′′+ − − − − − −
∑
( )( ) ( ) ( ) ( ) ( )( )
2
21
1 1 1N
n n w w w
n
d X tr t X t D j B k A m
dtφ
=
′+ − − − − − −∑
] ( ) ( ) ( ) ( )( )1 1 1 , = 1, 2, 3, ...i w w wg X t D j B k A m i Nφ+ − − − − − − (5.32)
where 1in
δ = when i n= , and 0in
δ = when i n≠ . Rearranging Equation (5.32) in the
order of the mass, damping and stiffness terms with the forcing term on the right-hand
side gives the following:
( ) ( ) ( ) ( ) ( )( )2 2
, ,1 1 1 1
1 1 1cNN
in i w w ww j k mn j k m
mL M X t D j B k A mδ φ= = = =
+ − − − − − −
∑ ∑∑∑
( ) ( ) ( ) ( )( ) ( )1 1 1n w w w n
X t D j B k A m r tφ⋅ − − − − − − &&
( )( ) ( ) ( ) ( ) ( )( )
2 2
, ,1 1 1 1
2 1 1 1cNN
i w w ww j k m
n j k m
dX tM X t D j B k A m
dtφ
= = = =
+ − − − − − −
∑ ∑∑∑
( ) ( ) ( ) ( )( ) ( )1 1 1n w w w n
X t D j B k A m r tφ′⋅ − − − − − − &
( )
( )2
2 24
, ,1 1 1 1
cNN
in n w j k mn j k m
dX tEIL a M
dtδ
= = = =
+ +
∑ ∑∑∑
( ) ( ) ( ) ( )( ) 1 1 1i w w wX t D j B k A mφ⋅ − − − − − −
( ) ( ) ( ) ( )( ) 1 1 1n w w wX t D j B k A mφ′′⋅ − − − − − −
( )
( )( ) ( ) ( ) ( )( )
22 2
, , 21 1 1
1 1 1cN
i w w ww j k mj k m
d X tM X t D j B k A m
dtφ
= = =
+ − − − − − −∑∑∑
( ) ( ) ( ) ( )( ) ( ) 1 1 1n w w w nX t D j B k A m r tφ′⋅ − − − − − −
( ) ( ) ( ) ( ) ( )( )2 2
, ,1 1 1
1 1 1 , = 1, 2, 3, ...cN
i w w ww j k mj k m
M g X t D j B k A m i Nφ= = =
= − − − − − − −∑∑∑ (5.33)
Expanding Equation (5.33) into matrix form gives:

Chapter 5 – Moving unsprung mass within a modal and finite element framework
215
1
2
3
1 0 0 ... 0
0 1 0 ... 0
0 0 1 ... 0
...... ... ... ... ...
0 0 0 ... 1 N
r
r
mL r
r
&&
&&
&&
&&
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 22 2
3 1 3 2 3 3 3 3, ,1 1 1
1 2 3
...
...
...
... ... ... ... ... ...
...
c
N
NN
Nw j k mj k m
N N N N N N
r
r
M r
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
= = =
+
∑∑∑
&&
&&
&&
&&
( )
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 22 2
3 1 3 2 3 3 3 3, ,1 1 1
1 2 3
...
...
2 ...
... ... ... ... ... ...
...
c
N
NN
Nw j k mj k m
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
= = =
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
∑∑∑
&
&
&
&
411
422
433
4
0 0 ... 0
0 0 ... 0
0 0 ... 0
...... ... ... ... ...
0 0 0 ... NN
ra
ra
EIL ra
ra
+
( )
( )
1 1 1 2 1 3 1 1
2 2 1 2 2 2 3 2 22 2
3 1 3 2 3 3 3 3, ,1 1 1
1 2 3
...
...
...
... ... ... ... ... ...
...
c
N
NN
Nw j k mj k m
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
= = =
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′
′′ ′′ ′′ ′′ + ′′ ′′ ′′ ′′
∑∑∑
( )
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 222 2
3 1 3 2 3 3 3 3, , 21 1 1
1 2 3
...
...
...
... ... ... ... ... ...
...
c
N
NN
Nw j k mj k m
N N N N N N
r
rd X t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
= = =
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
∑∑∑
( )
1
22 2
3, ,1 1 1
...
cN
w j k mj k m
N
M g
φ
φ
φ
φ
= = =
= −
∑∑∑ (5.34)
In the matrices, 1 2 3, , φ φ φ etc. are evaluated at ( ) ( ) ( ) ( )1 1 1 .w w w
X t D j B k A m− − − − − −

Chapter 5 – Moving unsprung mass within a modal and finite element framework
216
5.3 Validating the Unsprung Mass Systems
In order to validate modal and finite element unsprung mass models, the author
compares their results with suitable results obtained from the literature. In all
examples, the gravitational and damping effects of the beam are ignored. In addition,
one uses the Newmark time integration method with 500 equal time steps to solve the
transient analysis and time t is arranged in such a manner that the front wheel of the
train is at the left support at t = 0 sec. The initial displacement and velocity of the
unsprung wheel and beam are equal to zero. It should be noted that in each example,
unless otherwise stated, the author uses 6 modes in the modal system, while in the
finite element system the beam is discretized into 10 beam elements.
5.3.1 Wheel as a moving unsprung load traversing a cantilever beam
In this first example, the author examines the effects of a moving unsprung mass
traversing a fixed-free cantilever beam at constant speed c of 50.8 m/s from left to
right, where the inertia effects of the wheel mass are omitted; thus only the
gravitational effects of the mass are taken into account i.e. the mass of the wheel Mw
is equal to 2629 kg, thus the wheel has a weight of 25.79 kN. The author adopts the
same cantilever beam as Akin & Mofid (1989), such that the beam has a length L of
7.62 m, Young modulus of elasticity E of 2.07 x 1011
N/m2, moment of inertia I of
4.58 x 10-5
m4, and mass per unit length m of 46 kg/m, so .7.5
wM mL = Using
Equation (C.27a) the first natural frequency of this particular beam is
1 27.49 rad/ c.seω = It should also be noted that the beam properties used are very
responsive and unrealistic in practise and are only used for comparison purposes.
The vertical displacement at the free-end of the cantilever beam is plotted as a
function of time in Figure 5.5. The results shown in Figure 5.5a relate to the moving

Chapter 5 – Moving unsprung mass within a modal and finite element framework
217
unsprung load traversing a fixed-free cantilever beam (fixed at x = 0), while Figure
5.5b shows the results of the moving unsprung load traversing a free-fixed cantilever
(fixed at x = L). One can observe a striking similarity between the results from both
for the author’s system and the results obtained from Akin & Mofid (1989). The
reader should be aware that in Akin & Mofid’s (1989) paper, gravity acts in the
upwards direction. In addition, one can also conclude that all results are identical to
those obtained in Figure 3.12 for the exact and simple model.
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Akin & Mofid (1989)
Modal (6 Modes)
Finite Element Model
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Akin & Mofid (1989)
Modal (6 Modes)
Finite Element Model
Figure 5.5: Vertical displacement at the free-end of the cantilever beam due to a
moving unsprung load: (a) Fixed-free cantilever beam; (b) Free-fixed
cantilever beam (Bowe & Mullarkey, 2008)
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
218
5.3.2 Wheel as a moving unsprung mass traversing a cantilever beam
Using the same beam and point mass properties as those of Section 5.3.1, one now
investigates the effects of a moving unsprung mass traversing a cantilever beam as
shown in Figure 5.6. On this occasion the inertia effects of the wheel mass as well as
its gravitational effects are taken into account. The wheel is traversing at constant
speed c = 50.8 m/s from left to right across the beam. In this particular model, the
unsprung wheel has a mass Mw = 2629 kg, i.e. 7.5.w
M mL =
Figure 5.6: Moving unsprung mass traversing a cantilever beam
In Figure 5.7, the author plots the vertical displacement at the free-end of the fixed-
free cantilever beam (fixed at x = 0) as a function of time. Only the local acceleration
of the moving unsprung wheel is taken into account in Figure 5.7a, while Figure 5.7b
presents the results with the total (local plus convective) acceleration of the moving
unsprung wheel. In addition, the author plots in Figure 5.7b the results of a moving
sprung wheel traversing the cantilever, as developed in Chapter 4, where the Hertzian
spring is given a reasonably large stiffness value of 1.4x106 kN/m. In one example,
the moving sprung wheel is not allowed to separate from the beam; in another, it is
allowed to separate. Examining the results of Figure 5.7a, it can be seen that the
results of the author’s model are quite similar to the results of Akin & Mofid’s (1989)
modal system when the author omits convective acceleration. The results for the
author’s two unsprung models in Figure 5.7b show a striking similarity with the
z
y
0
L
Mw
x
c

Chapter 5 – Moving unsprung mass within a modal and finite element framework
219
results from the sprung model with no separation. Figure 5.7b shows that the results
from the sprung model with separation are slightly different.
-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Akin & Mofid (1989)
Modal (6 Modes) - Local acceleration only
Finite Element Model - Local acceleration only
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t m
)
Modal (6 Modes) - Total acceleration
Finite Element Model - Total acceleration
Sprung Wheel - Without seperation
Sprung Wheel - With seperation (Figure 4.8a)
Figure 5.7: Vertical displacement of the free end of a fixed-free cantilever beam due to a
moving unsprung wheel travelling at 50.8 m/s: (a) local acceleration only;
(b) total (local plus convective) acceleration (Bowe & Mullarkey, 2008)
The reader can see by comparing Figure 5.7a with 5.7b that convective acceleration
should not be omitted. It can be seen that the free-end deflection in Figure 5.7b is a
quarter the deflection in Figure 5.7a at time t = 0.15 sec. Moreover, the graphs in
Figure 5.7a are different in form from the graphs of Figure 5.7b.
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
220
In Figure 5.8, one can see that the contact force between the moving unsprung wheel
and the beam goes negative at time t = 0.085 sec. In the case of the moving sprung
wheel, separation occurs at this time; contact is re-established at time t = 0.114 sec.
For the moving unsprung systems, it is shown that the reaction force becomes
negative at a much earlier time t = 0.099 sec. During separation, the reaction force of
the unsprung wheel must still be computed in order to track its vertical position.
-2.0
-1.5
-1.0
-0.5
0.0
0.5
0 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Modal (6 Modes) - Total acceleration
Finite Element Model - Total acceleration
Sprung Wheel - Without Seperation
Sprung Wheel - With Seperation (Figure 4.9a)
Figure 5.8: Contact force between the moving unsprung mass and beam
Next the authors examine the dynamic effects of the moving unsprung wheel
traversing a free-fixed cantilever beam (fixed at x = L) as shown in Figure 5.9.
Figure 5.9: Moving unsprung mass traversing a free-fixed cantilever beam
z
y
0
L
Mw
x
c

Chapter 5 – Moving unsprung mass within a modal and finite element framework
221
The vertical displacement at the free-end of the cantilever beam as a function of time
is plotted in Figure 5.10. As before, only the local acceleration of the moving
unsprung wheel is taken into account in Figure 5.19a, while Figure 5.10b presents
results for the total (local plus convective) acceleration of the moving unsprung wheel.
-0.12
-0.10
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Akin & Mofid (1989)
Modal (6 Modes) - Local acceleration only
Finite Element Model - Local acceleration only
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.00 0.03 0.06 0.09 0.12 0.15
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 Modes) - Total acceleration
Finite Element Model - Total acceleration
Sprung Wheel - Without seperation
Sprung Wheel - With seperation (Figure 4.8b)
Figure 5.10: Vertical displacement of the free-end of a free-fixed cantilever beam due to
a moving unsprung mass travelling at 50.8 m/s: (a) local acceleration only;
(b) total (local plus convective) acceleration (Bowe & Mullarkey, 2008)
Examining the results of Figure 5.10a, it can be clearly seen that the results of the
author’s model are very similar to the results of Akin & Mofid’s (1989) modal
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
222
system, while the results for the author’s unsprung model in Figure 5.10b are
comparable with the results from the sprung model with no separation. Comparing the
free-end deflection of the beam in Figure 5.10a with 5.10b, it can be seen that the
results vary by a factor of 4, which is a similar ratio to that observed in Figure 5.7.
It can be observed from Figure 5.11 that as the moving unsprung wheel approaches
the right-hand support of the cantilever beam, it experiences a substantial compressive
reaction force from the beam until time t = 0.135 sec. Beyond time t = 0.135 sec the
wheel then experiences a very large tensile reaction force from the beam. In the case
of the moving sprung wheel, separation occurs at this time and contact with the beam
is not re-established for the remaining duration of this analysis.
-20
-15
-10
-5
0
5
10
15
20
0 0.03 0.06 0.09 0.12 0.15
Time (sec)
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Modal (6 Modes) - Total Acceleration
Finite Element Model - Total Acceleration
Sprung Wheel - Without seperation
Sprung Wheel - With seperation (Figure 4.9b)
Figure 5.11: Contact force between the moving unsprung mass and beam
The author now examine the effects of convective accleration at lower speeds. Figure
5.12 presents the vertical displacement at the free-end of a cantilever beam as a
function of time where the cantilever is subjected to an unsprung mass traversing the
cantilever at a speed c of 27.78 m/s as well as at a very slow speed c of 1 m/s using

Chapter 5 – Moving unsprung mass within a modal and finite element framework
223
the author’s models. The results obtained from the fixed-free cantilever beam (fixed at
x = 0) are shown in Figure 5.12a, while Figures 5.12b and 5.12c plot the results from
the free-fixed cantilever beam (fixed at x = L) due to the moving unsprung mass.
Examining Figures 5.12a and 5.12b, the reader can see that the free-end deflection of
the cantilever beam without convective acceleration varies by a factor of 3 with the
results for the total (local plus convective) acceleration at the speed c of 27.78 m/s.
Whereas, at the very slow speed c of 1 m/s, Figure 5.12a shows that there are no
significant difference between the convective acceleration and the total (local plus
convective) acceleration, while Figure 5.12c shows a noticeable difference in results
at lower speeds.
It can be seen from Figure 5.12c that as the moving unsprung mass enters the free-end
of the free-fixed cantilever beam it tends to undergo a periodic oscillation; however,
the local acceleration model tends to decay at a much quicker rate than the total (local
plus convective) acceleration model as the moving unsprung mass approaches the
support (Bowe & Mullarkey, 2008).
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal & FEM - Local acceleration (1m/s)
Modal & FEM - Local acceleration (27.78 m/s)
Modal & FEM - Local plus convective acceleration (1m/s)
Modal & FEM - Local plus convective acceleration (27.78 m/s)
(a)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
224
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal & FEM - Local acceleration (27.78 m/s)
Modal & FEM - Local plus convective acceleration (27.78 m/s)
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal & FEM - Local acceleration (1 m/s)
Modal & FEM - Local plus convective acceleration (1 m/s)
Figure 5.12: Vertical displacement at the free-end of a cantilever beam due to a
moving unsprung mass at various speeds: (a) fixed-free cantilever
beam at both speeds; (b) free-fixed cantilever beam at 27.78 m/s; (c)
free-fixed cantilever beam at 1 m/s (Bowe & Mullarkey, 2008)
5.3.3 Moving unsprung system traversing a simply supported beam
For comparison purposes, one now examines a simply supported beam subjected to a
single moving system as presented in Figure 5.13. This system comprises two masses,

Chapter 5 – Moving unsprung mass within a modal and finite element framework
225
one an unsprung mass Mw in contact with beam and the other a sprung mass Mv
supported by means of a spring of stiffness k1. In accordance with Fryba (1999), the
author will now show that varying the ratio between the sprung mass Mv and the
unsprung mass Mw will have little dynamic effect on the bridge. In all simulations, the
system traverses the beam at a constant speed c of 27.78 m/s (100 km/hr). The total
mass of the vehicle ( )w vM M+ is equal to 5.75t, while the spring stiffness k1 is 1595
kN/m. The different w v
M M ratios examined by the author are: 0.01, 0.25, 1.0, 4.0
and 100. Using the same data as Yang and Wu (2001), the beam has a length L of
25m, Young’s modulus of elasticity E of 2.87x106 kN/m
2, moment of inertia I of 2.9
m4, mass per unit length m of 2.303 t/m and a Poisson’s ratio ν of 0.2. As in previous
models, the gravitational and damping effects of the beam are ignored. In each case,
time t is arranged in such a manner that the wheel is at the left hand support at t = 0
sec and the initial displacement and velocity of the beam are equal to zero. In
addition, the author describes the mid-span deflection of the simply supported beam
using the first 6 modes of vibration in the modal system, while in the finite element
system the beam is discretized into 10 beam elements. The Newmark time integration
method (Bathe, 1996) with 500 equal time steps is used to solve the transient analysis.
In this particular model, the vehicle to beam mass ratio is ( ) 0.01.w vM M mL+ =
Figure 5.13: Moving unsprung system traversing a simply supported beam
z
y
0
L
x
c
Mw
Mv
k1

Chapter 5 – Moving unsprung mass within a modal and finite element framework
226
In Figure 5.14, the author presents the vertical displacement, vertical acceleration and
bending moment at mid-point of the beam as a function of time for both the modal
and finite element models. Since the w v
M M ratio is relatively small, comparisons
with the results can also be made with the results presented in Section 4.3.4 for the
sprung mass model. For the internal forces in finite element models, the author has
only chosen local node 2 of the 5th
element (see Section 3.2.2.3 for details about
internal forces). From inspection of Figure 5.14, one can see that all results are very
similar with each other.
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 modes)
Finite Element Model
Sprung Wheel - Figure 4.14a
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Modal (6 modes) Finite Element Model Sprung Wheel - Figure 4.14b
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
227
0
50
100
150
200
250
300
350
400
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
Modal (6 modes)
Finite Element Model
Sprung Wheel - Figure 4.14c
Figure 5.14: Time history at mid-span of the beam: (a) vertical displacement; (b)
vertical acceleration; (c) bending moment
The vertical displacements at mid-span of the beam as a function of time, for the
remaining w v
M M ratios, are then plotted in Figure 5.15. Examining the results in
Figure 5.15, one can see that the results for the modal method are very similar with
the results for the finite element models. In addition, one can see that varying the ratio
between the sprung and unsprung masses tends to have little effect on the dynamic
response of the beam, as observed by Fryba (1999), for these specific values.
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 modes) - Mw /Mv=0.25
Finite Element Model - Mw /Mv=0.25
(c)
(a)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
228
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 modes) - Mw /Mv=1.00
Finite Element Model - Mw /Mv=1.00
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 modes) - Mw /Mv=4.00
Finite Element Model - Mw /Mv=4.00
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (6 modes) - Mw /Mv=100
Finite Element Model - Mw /Mv=100
Figure 5.15: Vertical displacement at mid-span of simply supported beam as a
function of time due to a moving unsprung system with various
w vM M ratios: (a) 0.25; (b) 1.00; (c) 4.00; (d) 100
(b)
(c)
(d)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
229
5.3.4 Unsprung wheel system at wide range of speeds
Adopting the same simply supported beam properties to that of Yang & Wu (2001),
such that bridge has a length L of 25m, Young’s modulus of elasticity E of 2.87x106
kN/m2, moment of inertia I of 2.9 m
4, mass per unit length m of 2.303 t/m and a
Poisson’s ratio ν of 0.2, the author now considers the following unsprung vehicle
model as shown in Figure 5.16. The vehicle to bridge mass ratio is 0.5; the unsprung
wheel mass to sprung vehicle mass ratio is 0.25; the bridge to vehicle frequency ratio
is 3; the vehicle damping ratio is 0.125. These values are the same as those used by
Olsson (1985); thus, in this example Mw is 5.75 t, Mv is 23 t, k1 is 2300 kN/m, and c1
is 57.5 kNs/m. In Figure 5.17, the author plots the dynamic amplification factor at
mid-span of the beam for a wide range of speeds for the moving unsprung vehicle.
From the results, one can observe that the results of the modal and finite element
system are remarkably similar to Olsson’s (1985) results. Comparing Figure 5.17 with
Figure 4.22, the author can reinforce the point that the unsprung model is comparable
to the sprung model provided that the Hertzian spring stiffness is given a reasonably
large value.
Figure 5.16: Moving unsprung vehicle traversing a simply supported beam
z
y
0
L
x
c
Mw
Mv
k1 c1

Chapter 5 – Moving unsprung mass within a modal and finite element framework
230
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0.0 0.2 0.4 0.6 0.8 1.0
Velocity Ratio αααα
Dy
na
mic
am
plifi
ca
tio
n f
ac
tor D
d
Olsson [10] Unsprung System
Modal (6 Modes)
Finite Element Model
Figure 5.17: Moving unsprung vehicle at a wide range of speeds
5.3.5 Sensitivity analysis of the unsprung systems and simply supported beam
In this section the author conducts a sensitivity analysis of the unsprung models by
examining the beam’s internal forces, which are much more sensitive to the number
of modes used when compared with the beam deflection. Recalling Equation (A.16)
and (A.19), the bending moment and shear force of the beam are proportional to the
second and third derivatives of the deflection as follows:
2
2
vM EI
x
∂=
∂ (5.35a)
3
3
vQ EI
x
∂= −
∂ (5.35b)
For the modal solution, the deflection ( ),v x t is computed using Equation (5.10),
which is rewritten again as follows:
( ) ( ) ( ),n n
n
v x t r t xφ=∑ (5.36)
where ( )n xφ is the n-th characteristic shape as defined in Appendix C, and ( )nr t is
the n-th function of time which has to be calculated.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
231
With the aid of Equation (C.47) the characteristic shape for a simply supported beam
can be written as follows:
( ) 2 sinn
n xx
L
πφ = (5.37)
The derivatives of Equation (5.37) with respect to x are given as:
( ) ( )( ) 2 cosn x n x L n Lφ π π′ = × (used to find beam rotations) (5.38a)
( ) ( )2
( ) 2 sinn
x n x L n Lφ π π′′ = − × (used to find bending moment) (5.38b)
( ) ( )3
( ) 2 cosn
x n x L n Lφ π π′′′ = − × (used to find shear force) (5.38c)
where each dash over ( )n xφ represents a derivative with respect to x. Comparing
( )n
xφ ′′′ in Equation (5.38c) with 1( )G x′′′ and 2 ( )G x′′′ in Equation (B.8), the reader can see
that the modal derivatives do not suffer discontinuities at the boundaries, unlike the
finite element shape functions. Nevertheless, in Section 3.2.2.4 the author has shown
that the finite element model gives good shear forces using third order derivatives.
Using the same beam and vehicle properties as Section 5.3.3, the author now plots the
vertical displacement, bending moment and shear force at mid-span of the beam as a
function of time using 3, 6 and 12 modes in Figure 5.18. It can be seen from the
results that the beam deflection is insensitive to the number of modes; the bending
moment is slightly sensitive; while the shear force is very sensitive to the number of
modes used.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
232
-0.0030
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Modal (3 modes)
Modal (6 modes)
Modal (12 modes)
0
50
100
150
200
250
300
350
400
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Be
nd
ing
Mo
me
nt
(kN
m)
Modal (3 modes)
Modal (6 modes)
Modal (12 modes)
-40
-30
-20
-10
0
10
20
30
40
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Sh
ea
r F
orc
e (
kN
)
Modal (3 modes)
Modal (6 modes)
Modal (12 modes)
Figure 5.18: Time history at mid-span of the simply supported beam: (a) vertical
displacement; (b) bending moment; (c) shear force
(a)
(b)
(c)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
233
Next, the author compares the bending moment and shear force as functions of time at
mid-span of the beam generated by the modal model and the finite element model as
shown in Figure 5.19. In the finite element model, the beam is discretized into 20
beam elements. Figure 5.19 shows that the bending moments for both systems are
very alike, while the shear force for the modal solution is somewhat better than the
finite element solution with 20 beam elements. Increasing the number of beam
elements in the finite element model will gradually give a better comparison.
0
50
100
150
200
250
300
350
400
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Ben
din
g M
om
en
t (k
Nm
)
Modal (12 Modes)
FEM (20 elements) LN1 at midspan
FEM (20 elements) LN2 at midspan
-40
-30
-20
-10
0
10
20
30
40
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Time (sec)
Sh
ea
r F
orc
e (
kN
m)
Modal (12 Modes)
FEM (20 elements) LN1 at midspan
FEM (20 elements) LN2 at midspan
Figure 5.19: Comparing the modal with the finite element solution at mid-span of
the beam as a function of time: (a) bending moment; (b) shear force
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
234
Subsequently, the author examines the bending moment and shear force in the simply
supported beam at a specific time i.e. time t = 0.45 sec. Table 5.1 presents the modal
solution for the deflection, bending moment and shear force using Equations (5.37b)
and (5.37c) at a position x = 5 m and 12.5 m at the selected time. From inspection of
the results, it can be seen that the bending moment and shear force at n = 1 differ by
as much as 20% from the bending moment and shear force at n = 12. The deflections
only differ by 2%.
Table 5.1a: Analytical modal bending moment and shear force at x = 5 m
Table 5.1b: Analytical modal bending moment and shear force at x = 12.5 m

Chapter 5 – Moving unsprung mass within a modal and finite element framework
235
Figure 5.20 plots the bending moment and shear force at different positions along the
beam at this selected time using the modal model and the finite element method. It
can be seen from the results that the modal solution tends to give slightly lower values
(approximately 5%) than its finite element counterpart. Re-examining Table 5.1, it
would seem unlikely that the bending moment would increase by much beyond the
12th
mode.
0
100
200
300
400
0 5 10 15 20 25
Position along beam (m)
Be
nd
ing
Mo
me
nt
(kN
m)
Modal (12 modes)
FEM (10 elements)
-40
-30
-20
-10
0
10
20
30
40
0 5 10 15 20 25
Position along beam (m)
Sh
ea
r F
orc
e (
kN
)
Modal (12 modes)
FEM (10 elements) LN1
FEM (10 elements) LN2
Figure 5.20: (a) Bending moment; (b) shear force along the simply supported beam
at time t = 0.45 sec for the modal and finite element system
(b)
(a)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
236
5.3.6 Multiple unsprung vehicles traversing a simply supported beam
Next, the author examines the effects of several vehicles traversing a simply
supported beam as presented in Figure 5.21. Each vehicle comprises a rigid vehicle
body supported by a pair of axles by means of primary suspensions. The primary
suspension consists of spring and dashpot. The beam has a length L of 30 m, Young’s
modulus of elasticity E of 2.87x107 kN/m
2, moment of inertia I of 6.635 m
4, mass per
unit length m of 32.4 t/m, Poisson’s ratio ν of 0.2 and first natural frequency 1ω of
25.666 rad/sec (i.e. 4.085 Hz). These properties appear in the works of Yang and Wu
(2001). The bridge beam is discretized into ten beam elements. The data adopted for
the vehicle is the same as that presented by Yang and Wu (2001). This data is taken
from the Manchester vehicle model (Iwnicki, 1999). The unsprung wheel mass Mw is
6.241 t, the vehicle mass Mv is 32 t, the mass moment of inertia of the vehicle Iv is
1970 t m2, the suspension stiffness k1 is 430 kN/m, the suspension damping c1 is 20
kN/m, the distance between axles of a single vehicle Aw is 19 m and the distance
between the rear wheel on a vehicle and the front wheel of the following vehicle Dw is
6 m. The train consists of 10 identical vehicles traversing the beam at a constant speed
c of 27.778 m/s (100km/hr). One ignores both the gravitational and damping effects
of the beam. The Newmark time integration method (Bathe, 1996) with 2000 equal
time steps is used to solve the transient analysis. Time t is arranged in such a manner
that the front wheel is at the left support at t = 0 sec. The initial displacement and
velocity of the unsprung wheel and beam are equal to zero.
The author compares the results from the unsprung finite element system with the
results from the sprung mass system using the ANSYS contact element as well as
with the results using a moving load solution. The Hertzian spring stiffness kH is
1.4x106 kN/m.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
237
Figure 5.21: Multiple unsprung vehicles traversing simply supported beam
In Figure 5.22, a plot of the deflection and vertical acceleration at mid-span of the
beam as a function of time for the unsprung finite element system can be seen. It can
be observed from Figure 5.22 that the three models compare well with each other.
-0.0014
-0.0012
-0.0010
-0.0008
-0.0006
-0.0004
-0.0002
0.0000
0.0002
0 2 4 6 8 10
Time (sec)
Vert
ical D
isp
lacem
en
t (m
)
Unsprung f inite element model
Sprung mass system
Moving Load - Figure 3.30a
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0 2 4 6 8 10
Time (sec)
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Unsprung f inite element model
Sprung mass system
Moving Load - Figure 3.30b
Figure 5.22: Time history at mid-span of the beam: (a) vertical displacement; (b)
vertical acceleration
(a)
, v v
M I
wM
1c1k 1k
wM
c
, , E I mwA
L
1c
wD
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
238
5.4 Application to the Boyne Viaduct
The author is now confident in analysing the dynamic behaviour of the Boyne
Viaduct railway bridge subjected to the unsprung mass systems. The Boyne Viaduct
is modelled as a simply supported beam during the unsprung modal simulations. The
unsprung finite element system has no restriction regarding the structure shape, thus
the Boyne Viaduct can be represented as a two-dimensional or three-dimensional
structure. More details regarding the modelling of the Boyne Viaduct truss bridge as a
simply supported beam can be found in Appendix F as well as Fryba (2001).
5.4.1 Single unsprung wheel traversing Boyne Viaduct modelled as a beam
The author examines the Boyne Viaduct that is represented as a simply supported
beam, subjected to a single moving unsprung wheel travelling at a slow (10 km/hr)
and fast speed (164 km/hr). In Appendix F, it is found that the Boyne Viaduct can be
represented as a simply supported beam using the following beam properties: length L
of 80.77 m, Young’s modulus of elasticity E of 2.05x108 kN/m
2, moment of inertia I
of 1.22 m4, mass per unit length m of 1.1775 t/m and Poisson’s ratio ν of 0.3. The first
natural frequency 1ω is 22.048 rad/sec, which is equivalent to 3.51 Hz. This natural
frequency differs by about 3% with the natural frequency for the two-dimensional
truss presented in Section 3.2.3. In addition, the unsprung wheel chosen is the front
wheel of a 201 Irish-Rail locomotive. Therefore Mw = 9.3 t, which has an equivalent
weight of 91.25 kN; hence, is 0.1P G . In each example, time t is arranged in such a
manner that the wheel arrives on the bridge at 0ct L = and exits the bridge at
1ct L = . The beam is represented by 12 modes.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
239
In Figure 5.23, the author plots the vertical displacement and bending moment at mid-
span of the beam as a function of time. As before, the static effects of the beam are
omitted; hence, only the dynamic effects are taken into account. From inspection of
Figure 5.23, the reader can see that the dynamic response of the beam is minimal at
the slow speed (10km/hr), while at the higher speed (164 km/hr) the beam tends to
experience a noticeable oscillation in deflection and bending moment. In addition, one
can see that modal solution is very similar to the finite element method.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
Moving Unsprung Wheel - 10 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (FEM)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Be
nd
ing
mo
me
nt
co
eff
icie
nt
Moving Unsprung Wheel - 10 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (FEM)
Figure 5.23: (a) Vertical displacement; (b) bending moment at mid-span of a simply
supported beam representing the Boyne Viaduct subjected to an
unsprung wheel travelling at 10 km/hr and 164 km/hr
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
240
In Figure 5.24 and 5.25, the author presents the vertical acceleration of the wheel and
contact force between the unsprung wheel and beam as a function of time, where only
the higher vehicle speed is considered. The reaction force between the unsprung
wheel and beam in Figure 5.25 is computed using Equation (5.17a). Inspecting
Figures 5.24 and 5.25, it can be observed that the modal solution and finite element
solution are very similar.
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Moving Unsprung Wheel - 164 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (FEM)
Figure 5.24: Vertical acceleration of the unsprung wheel i.e. riding comfort
-1.10
-1.05
-1.00
-0.95
-0.90
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
Moving Unsprung Wheel - 164 km/hr (Modal)
Moving Unsprung Wheel - 164 km/hr (FEM)
Figure 5.25: Contact force between the unsprung wheel and beam

Chapter 5 – Moving unsprung mass within a modal and finite element framework
241
Before finishing with the modal solution, the author investigates the dynamic effects
of the moving unsprung wheel traversing a simply supported beam (which represents
the Boyne Viaduct) at a wide range of speeds. Since the first natural frequency of the
simply supported beam is 3.51 Hz, the critical speed of the vehicle is computed using
Equation (3.30) as 567 m/s,=cr
c which is 2041 km/hr. As a parametric study, Figure
5.26a plots the dynamic amplification factor DAFU at a range of speeds between
0 1.0α< < for the moving unsprung wheel; however, Figure 5.26b plots the DAFU at
a more realistic range of speeds 10 km/hr to 300 km/hr i.e. 0 0.147α< < for this
structure. A value for α of 0.147 is indicated by the dashed line in Figure 5.26a.
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Speed ratio αααα
DA
FU
Single Unsprung Wheel (P/G = 0.1)
Moving Load - Figure 3.27a
1.00
1.05
1.10
1.15
1.20
1.25
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Single Unsprung Wheel (P/G = 0.1)
Moving Load - Figure 3.28
Figure 5.26: Dynamic amplification factor at mid-span of the Boyne Viaduct versus
speed ratio: (a) parametric study; (b) realistic vehicle speeds
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
242
Examining Figure 5.26a, it can be seen that the results for the moving unsprung wheel
are similar to the results for the moving load especially at lower speeds 0.25α < ;
however at the higher speed the results can vary by as much as 10%; nonetheless the
curvatures of both sets of results are very similar. Figure 5.26b shows that the
additional wheel inertia causes a slight increase in the dynamic response, which was
also observed in Figure 4.38 for the moving sprung wheel. However, at a range of
speeds between 80 to 100 km/hr, one can see that the results in Figure 5.26b are
different from the results in Figure 4.38. Between these speeds, the moving unsprung
wheel traversing the simply supported beam does not suffer a large increase in the
DAFU, which may only occur when the bridge is modelled as a truss.
5.4.2 Single unsprung wheel traversing two-dimensional Boyne Viaduct
The two-dimensional Boyne Viaduct railway bridge is subjected to an unsprung
wheel travelling at a slow (10 km/hr) and fast speed (164 km/hr). The unsprung wheel
chosen is the front wheel of a 201 Irish-Rail locomotive. Therefore Mw = 9.3 t, which
is equivalent to a weight of 91.25 kN; hence, is 0.1P G . It should be noted that on
this occasion the modal solution is not available as the structure is quite complex to
model. Only solutions from the finite element method developed in Section 5.2.2 are
used. Time t is arranged in such a manner that the wheel arrives on the bridge at
0ct L = and it exits the bridge at 1ct L = .
Figure 5.27(a) and (b) presents the vertical displacement and internal axial forces,
respectively, at mid-span of the bridge as a function of time. The static effects of the
bridge are omitted. Only the dynamic effects are taken into account. From inspection
of Figure 5.27, the reader can see that the dynamic response of the bridge is minimal

Chapter 5 – Moving unsprung mass within a modal and finite element framework
243
at the slow speed (10km/hr), while at the higher speed (164 km/hr) the bridge tends to
experience a noticeable oscillation in its deflection and axial force at mid-span. For
comparison purposes, the author also compares the results of the moving unsprung
wheel with the results obtained in Chapter 4 for the moving sprung wheel traversing
the two-dimensional Boyne Viaduct. It can be seen that both the unsprung wheel and
sprung wheel give very similar results. This is due to the reasonably large Hertzian
spring used for the sprung wheel, which has a spring stiffness of 61.4 10 kN/m.×
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
Moving Unsprung Wheel - 10 km/hr
Moving Unsprung Wheel - 164 km/hr
Sprung Wheel - Figure 4.33a - 164 km/hr
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
Moving Unsprung Wheel - 10 km/hr
Moving Unsprung Wheel - 200 km/hr
Sprung Wheel - Figure 4.33b - 200 km/hr
Figure 5.27: (a) Vertical displacement; (b) internal axial force at mid-span of the
Boyne Viaduct subjected to an unsprung wheel travelling at 10 km/hr
and 164 km/hr
L
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
244
Next, the vertical acceleration of the unsprung wheel as a function of time is shown in
Figure 5.28. The contact force between the unsprung wheel and bridge as a function
of time is shown in Figure 5.29. Again the author compares these results with the
results from the moving sprung wheel model and it can be seen that the unsprung
wheel tends to be slightly more responsive than the sprung wheel.
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Moving Unsprung Wheel - 164 km/hr
Sprung Wheel - Figure 4.34 - 164 km/hr
Figure 5.28: Vertical acceleration of the unsprung wheel i.e. riding comfort
-1.2
-1.1
-1.0
-0.9
-0.8
-0.7
0.0 0.2 0.4 0.6 0.8 1.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
Moving Unsprung Wheel - 164 km/hr
Sprung Wheel - Figure 4.35 - 164 km/hr
Figure 5.29: Contact force between the unsprung wheel and beam

Chapter 5 – Moving unsprung mass within a modal and finite element framework
245
Before analysing the unsprung wheel at a range of realistic speeds, the author firstly
conducts a parametric study of the unsprung wheel at a range of speeds, 0 1.0α< < .
In Section 3.2.3 the critical speed of the vehicle cr
c is computed as 550 m/s, which is
equal to 1980 km/hr for the two-dimensional Boyne Viaduct. The dynamic
amplification factors DAFU and DAFA for the unsprung wheel at a range of speed,
0 1.0α< < , can be seen in Figure 5.30. Examining the results, the reader can see that
good similarities can be observed between all results at slow speed, while at higher
speeds the results for the unsprung wheel diverge from the results for the sprung
wheel.
1.0
1.2
1.4
1.6
1.8
2.0
0.0 0.2 0.4 0.6 0.8 1.0
DA
FU
Speed ratio αααα
Unsprung Wheel - P/G ratio = 0.1
Sprung Wheel - Figure 4.37a
Moving Load
1.0
1.5
2.0
2.5
3.0
3.5
0.0 0.2 0.4 0.6 0.8 1.0
DA
FA
Speed ratio αααα
Unsprung Wheel - P/G ratio = 0.1 (Bot)
Sprung Wheel - Figure 4.37b (Bot)
Moving Load (Bot)
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
246
1.0
1.5
2.0
2.5
3.0
3.5
0.0 0.2 0.4 0.6 0.8 1.0
DA
FA
Speed ratio αααα
Unsprung Wheel - P/G ratio = 0.1 (Top)
Sprung Wheel - Figure 4.37b (Top)
Moving Load (Top)
Figure 5.30: Dynamic amplification factor at mid-span of the 2D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force in the
bottom chord; (c) axial force in the top chord
A closer examination of the DAFU at a realistic range of speeds, as represented by
values of α to the left of the vertical dashed line in Figure 5.30a, can be seen in Figure
5.31, which shows that the results for a moving unsprung wheel resemble the results
for the sprung wheel and moving load.
1.00
1.05
1.10
1.15
1.20
0 50 100 150 200 250 300
DA
FU
Speed (km/hr)
Unsprung Wheel - P/G = 0.1
Sprung Wheel - Figure 4.38
Moving Load - Figure 3.24
Figure 5.31: A close-up view of Figure 5.30a using a realistic range of speeds
(c)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
247
5.4.3 Multiple vehicles traversing two-dimensional Boyne Viaduct
This section analyses the vertical response of the two-dimensional Boyne Viaduct
subjected to several moving vehicles. All the wheels are modelled as unsprung
masses. This differs from Section 4.4.3 where the wheels are assumed to be separated
from the rail by a Hertzian spring. Authors such as Chatterjee et al. (1994), Lee
(1998), Yang et al. (1997) and Yang & Wu (2001) have conducted their studies using
the unsprung system, while authors such as Esveld (1989), Zhai & Cai (1997), Zhang
et al. (2001) and Sun & Dhanaekar, 2002 are in favour of the sprung system. In this
section the author compares results from both systems. Vehicles must undergo a static
analysis prior to the execution of the transient analysis. Otherwise sprung components
of the vehicle, i.e. bogie and car body, will not have settled under their own weight at
time t = 0 sec and would go into free vibration as the transient analysis is initiated.
The train model adopted is the same as Section 4.4.3 i.e. a locomotive and three
railway coaches. Figure 5.32(a) and (b) presents the vertical displacement and internal
axial force in the top and bottom chord of the two-dimensional Boyne Viaduct
subjected to the moving train at a slow (10 km/hr) and fast speed (164 km/hr).
Examining Figure 5.32, it can be seen that the dynamic responses of the bridge to the
unsprung wheels and to the sprung wheel models are similar. The vertical
acceleration, i.e. riding comfort, of the locomotive (V1) and first railway coach (V2)
travelling at the faster 164 km/hr is shown in Figure 5.33. The reader should refer to
Figure 4.40 for the position (V1) and (V2) selected on the train. This plot shows that
the absolute value of the vertical acceleration of the locomotive and railway coach is
less than the limit of 1.0 m/s2 recommended in Eurocodes (1990). Comparing Figure
5.33 with Figure 4.42, the reader can see that vertical acceleration of the unsprung
wheel is less than the sprung model; nevertheless, the results are fairly similar.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
248
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
2D Boyne - 10 km/hr (unsprung w heels)
2D Boyne - 164 km/hr (unsprung w heels)
Figure 4.41a - 164 km/hr (sprung w heels)
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
2D Boyne - 10 km/hr (unsprung w heels)
2D Boyne - 164 km/hr (unsprung w heels)
Figure 4.41b - 164 km/hr (sprung w heels)
Figure 5.32: (a) Vertical displacement; (b) axial force at mid-span of the 2D Boyne
Viaduct due to a train travelling at 10 km/hr and 164 km/hr
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
2D Train using unsprung w heels - 164 km/hr (V1)
2D Train using unsprung w heels - 164 km/hr (V2)
Figure 5.33: Vertical acceleration (riding comfort value) of the 2D vehicle bodies
(b)
Bottom chord
Top chord
(a)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
249
In Figure 5.34, the contact forces that exist between the 1st and 7
th unsprung wheels of
the train and the rail are examined at the faster speed (164 km/hr). It can be seen from
the results that as wheels enter the bridge or immediately after they leave the bridge
(and arrive on the rigid rail), the compressive force between the wheel and rail tends
to oscillate abruptly. Figure 5.34 is also somewhat similar to Figure 4.43.
-1.6
-1.4
-1.2
-1.0
-0.8
-0.6
-0.4
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
2D Train using unsprung w heels - 164 km/hr (W1)
2D Train using unsprung w heels - 164 km/hr (W7)
Figure 5.34: Contact force between the 1st and 7
th wheel and the rail
Next, the author examines the dynamic response of the two-dimensional Boyne
Viaduct subjected to the moving train at a range of realistic speeds, 0 0.15α< < i.e.
0 km/hr to 300 km/hr. Again, these results are compared with the results for sprung
wheel train models of Section 4.4.3. Figure 5.35 presents the dynamic amplification
factors DAFU and DAFA for a range of speeds between 10 km/hr to 300 km/hr. From
inspection of Figure 5.35, it can be seen that the amplification factors for unsprung
models tends to be slightly less than those for sprung models at speeds lower than 200
km/hr. The opposite is true at speeds exceeding 200 km/hr.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
250
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
2D Boyne (unsprung w heels)
2D Boyne (sprung w heels) - Figure 4.44a
2D Boyne (moving load)
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Bot Chord (unsprung w heels)
Bot Chord (sprung w heels) - Figure 4.44b
Bot Chord (moving load)
1.00
1.02
1.04
1.06
1.08
1.10
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Top Chord (unsprung w heels)
Top Chord (sprung w heels) - Figure 4.44c
Top Chord (moving load)
Figure 5.35: Dynamic amplification factor at mid-span of the 2D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force in the
bottom chord; (c) axial force in the top chord.
(a)
(b)
(c)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
251
5.4.4 Multiple vehicles traversing three-dimensional Boyne Viaduct
To finish the author examines the dynamic response of the three-dimensional Boyne
Viaduct railway bridge subjected to a train whose wheels are unsprung. The train
travels at operational speeds of 10 km/hr and 164 km/hr. This section also investigates
the dynamic response of the Boyne Viaduct railway bridge at a wide range of vehicle
speeds. Table 5.2 presents the time of execution of the unsprung system as well the
sprung system and multiple moving force system. Each model consists of 1000 equal
time-steps. The program was executed using an Intel Core Duo 2.13 GHz processor
with 2048 RAM. It is clear from the results that the moving force system has the
smallest execution time, while the unsprung system is approximately 25% faster than
the system using ANSYS contact elements and 350% faster than the system using
WRC element. The sprung wheel models require a large number of contact elements,
whether provided by the author or by ANSYS.
Table 5.2: Time of execution for the developed systems
3D Boyne Viaduct with 1000 time steps Cumulative Element Count
Time of execution (sec) Bridge Train Contacts
Train modelled with unsprung wheels
Unsprung wheel-rail contact element system 154 372 - 368
Train modelled with sprung wheels
Wheel-rail contact element system 154 372 788 1372
ANSYS contact elements 154 372 804 464
Train modelled by multiple moving forces
Simple model with overlapping 154 - - 55
Simple model without overlapping 334 - - 40
The vertical displacement, axial force in the top and bottom chord and bending
moment at mid-span of the cross-beam at mid-span of the bridge as a function of time
can be seen in Figure 5.36. It can be seen that there is little difference between the
results for the train modelled with unsprung wheels and those for the train with sprung
wheels.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
252
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
De
fle
cti
on
co
eff
icie
nt
3D Boyne - 10 km/hr (unsprung w heels)
3D Boyne - 164 km/hr (unsprung w heels)
Figure 4.48a - 164 km/hr (sprung w heels)
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ax
ial fo
rce
co
eff
icie
nt
3D Boyne - 10 km/hr (unsprung w heels)
3D Boyne - 164 km/hr (unsprung w heels)
Figure 4.48b - 164 km/hr (sprung w heels)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Be
nd
ing
mo
me
nt
co
eff
icie
nt 3D Boyne - 10 km/hr (unsprung w heels)
3D Boyne - 164 km/hr (unsprung w heels)
Figure 4.48c - 164 km/hr (sprung w heels)
Figure 5.36: (a) Vertical displacement; (b) axial force; (c) bending moment of the
cross-beam located at mid-span of the 3D Boyne Viaduct due to
vehicles travelling at 10 km/hr and 164 km/hr
Bottom chord
Top chord
(a)
(b)
(c)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
253
Next, the vertical acceleration of the locomotive (V1) and first railway coach (V2) as
they travel along the bridge are shown in Figure 5.37. Inspecting Figure 5.37, the
reader can see that the vertical acceleration, in absolute value, or riding comfort of the
locomotive (V1) and railway coach (V2) is less than the 1.0 m/s2 recommended in
Eurocodes (1990). Figure 5.38 presents the contact force between the 1st and 7
th
unsprung wheel and the rail with the train travelling at the faster speed (164 km/hr). It
can be seen from the results that as the wheels enter and exits the bridge; they
experience an abrupt tensile and compressive contact force and oscillate momentarily.
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
3D Train using unsprung w heels - 164 km/hr (V1)
3D Train using unsprung w heels - 164 km/hr (V2)
Figure 5.37: Vertical acceleration (riding comfort) of the 3D vehicle bodies
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.0 0.5 1.0 1.5 2.0
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
3D Train using unsprung w heels - 164 km/hr (W1)
3D Train using unsprung w heels - 164 km/hr (W7)
Figure 5.38: Contact force between the 1st and 7
th unsprung wheel and the rail

Chapter 5 – Moving unsprung mass within a modal and finite element framework
254
Finally, the author investigates the dynamic response of the three-dimensional Boyne
Viaduct subjected to the moving train at a range of realistic speeds, 0 0.15α< < i.e.
0 km/hr to 300 km/hr. These results are compared with the results for sprung wheel
train models of Section 4.4.5 as well as with the results for the two-dimensional
model of Section 5.4.3. In Figure 5.39, the dynamic amplification factors DAFU and
DAFA for a range of speeds between 0 km/hr to 300 km/hr are plotted. Examining
Figure 5.39, it can be seen that the results for the 3D unsprung model are close to the
results for the sprung model. Nevertheless, the results are reasonable similar, with
most results lying within 20% of each other at any particular speed.
1.00
1.02
1.04
1.06
1.08
1.10
1.12
1.14
1.16
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
3D Boyne (3D Train unsprung w heels)
2D Boyne (2D Train unsprung w heels) - Figure 5.35a
3D Boyne (3D Train sprung w heels) - Figure 4.51a
3D Boyne (3D Train as moving loads) - Figure 3.46
1.00
1.02
1.04
1.06
1.08
1.10
1.12
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Bot Chord (3D Train unsprung w heels)
Bot Chord (2D Train unsprung w heels) - Figure 5.35b
Bot Chord (3D Train sprung w heels) - Figure 4.51b
(a)
(b)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
255
1.00
1.02
1.04
1.06
1.08
1.10
1.12
0 50 100 150 200 250 300
Speed (km/hr)
DA
FA
Top Chord (3D Train unsprung w heels)
Top Chord (2D Train unsprung w heels) - Figure 5.35c
Top Chord (3D Train sprung w heels) - Figure 4.51b
Figure 5.39: Dynamic amplification factor at mid-span of the 3D Boyne Viaduct
versus speed ratio: (a) vertical displacement; (b) axial force in the
bottom chord; (c) axial force in the top chord.
5.5 Discussion of results and Conclusions
To summarize, this chapter develops both a modal model as well as finite element
model for moving unsprung wheels traversing a bridge. The system requires that the
unsprung wheel has the same vertical position as the vertical position of a point of the
beam directly underneath. Since the moving unsprung wheel is moving horizontally,
its vertical velocity is not the same as the vertical velocity of the point of the beam
directly underneath. In fact the vertical velocity of the moving unsprung mass is equal
to the local vertical velocity of the beam plus a convective term. Furthermore, the
vertical acceleration of the moving unsprung mass is equal to the local vertical
acceleration of the beam plus an additional convective term. Wheel-rail separation can
also occur; however, this concept is problematic. As the unsprung wheel regains
contact with the beam, it is likely to cause a large impact load to the beam. A spring
(c)

Chapter 5 – Moving unsprung mass within a modal and finite element framework
256
beneath the wheel would resolve this issue, but this idea is already developed in
Chapter 4.
As stated in Section 5.3.2, Akin & Mofid (1989) omit this additional convective
acceleration; thus, their solution for the deflection of the free-end of a cantilever beam
subjected to a moving unsprung mass is inaccurate. Section 5.3.2 also shows that the
results for an unsprung wheel and sprung wheel are comparable provided that the
wheel-rail contact (WRC) element is given a reasonably large Hertzian stiffness and
separation is not allowed. Examining the results presented in Section 5.3.1 to 5.3.5,
the reader can see that the modal model gives very similar results to the finite element
model for a single moving unsprung wheel. In Section 5.3.5, the reader can see that
the deflection at mid-span of the simply supported beam subjected to a moving
unsprung wheel is accurate with only 3 modes. However, at least 12 modes are
required to accurately describe its shear force. Furthermore, the internal forces in the
beam for the modal and finite element models can differ by approximately 5%.
Next, the author analyses the Boyne Viaduct railway-bridge modelled as a simply
supported beam, two-dimensional truss and three-dimensional bridge subjected to
either a single or multiple unsprung wheels. For the Boyne Viaduct modelled as a
simply supported beam (Section 5.4.1), the dynamic amplification factor for the
moving unsprung wheel and for the moving load are similar, especially in the range of
realistic vehicle speeds. When the Boyne Viaduct is modelled as a two-dimensional
truss (Section 5.4.2), the dynamic amplification factor for the moving unsprung
wheel, for a sprung wheel and for a moving load at the range of realistic vehicle
speeds are similar, but quite different at higher speeds beyond 0.2α ≥ .

Chapter 5 – Moving unsprung mass within a modal and finite element framework
257
Analyzing the two-dimensional truss (Section 5.4.3) subjected to multiple vehicles;
one found again that the dynamic amplification factor for the unsprung wheel system
and the sprung wheel system are similar. The moving multiple loads described in
Section 3.3.3.2 tend to have a much larger dynamic amplification factor, especially at
high speeds. Examining the results, the DAFU tends to peak at 200 km/hr with an
approximate value of 1.05. Finally in Section 5.4.4, the author simulates the dynamic
response of the three-dimensional Boyne Viaduct railway bridge subjected to a three-
dimensional train modelled with unsprung wheels. The results presented show that the
DAFU also tends to reach a peak at 200 km/hr with an approximate value of 1.07.
Additionally, it is shown that the vertical acceleration or riding comfort of the train is
unlikely to exceed the recommended value of 1.0 m/s2 as it traverses the bridge at its
maximum speed.
As a final note, it can be concluded that the results of the unsprung systems compare
well to the results from the wheel-rail contact (WRC) element. The computational
time of the unsprung system was found to be approximately 25% faster than the
computational time for the use of ANSYS contact elements and about 350% faster
than the computational time for the use of WRC element in the case of the three-
dimensional Boyne Viaduct subjected to multiple vehicles.

Chapter 5 – Moving unsprung mass within a modal and finite element framework
258

Chapter 6 – Wheel rail systems with irregularities
259
Chapter 6
Wheel rail systems with irregularities
6.1 Introduction
Until now, the thesis has assumed smooth wheel-rail conditions. However, rails can
have vertical and lateral deviations, which can lead to a pitching and rolling motion of
the vehicle as well as to wheel separation. This chapter goes beyond the scope of the
ANSYS contact elements by modelling rail irregularities for both the sprung and
unsprung wheel.
In the following development the author uses a deterministic irregularity function h
that is defined by the summation of several sinusoidal curves. This is the same
irregularity function as that presented by Chang & Lin (1996) and Yau et al. (1999).
( )1
2 sin
N
j
j j
xh x a
l
π
=
=
∑ (6.1)
where j
l and aj are the wavelength and amplitude, respectively, of the jth
wave, N is
the number of sine curves and x is the horizontal distance from the left support of the
beam.

Chapter 6 – Wheel rail systems with irregularities
260
In order to simulate the irregularity function in the wheel-rail contact (WRC) element,
one must apply forces and moments to the nodes of the beam element directly beneath
the wheel, and one must also apply a nodal force to the centre of the wheel. These
forces and moments are related to the beam element shape functions as well as the
Hertzian spring stiffness. The unsprung systems follow a similar development;
however, the vertical acceleration of the unsprung wheel introduces additional terms
such as the second derivative with respect to x for the irregularity function. The author
also develops the wheel-rail contact (WRC) element incorporating lateral rail
irregularities.
To facilitate the validation of the irregularity system, the author makes use of the
Manchester Benchmark Report (Iwnicki, 1999) by comparing and contrasting results
from the developed system with the results from this study. In particular, one
examines case studies TC3 and TC4 from the report, which simulates a freight wagon
(Benchmark Vehicle 2) traversing track with lateral and vertical irregularities.
This then leads to a brief examination of the dynamic effects caused by periodic
irregularities along the Boyne Viaduct. The author examines several scenarios; short
and long wavelength irregularities with in-phase rail irregularities (inducing a vehicle
pitching motion), out-of-phase rail irregularities (inducing a vehicle rolling motion)
and a random irregularity created by several sinusoidal functions. The author finishes
by simulating track with lateral irregularities.

Chapter 6 – Wheel rail systems with irregularities
261
6.2 Development of Irregularity models
6.2.1 Sprung wheel incorporating rail irregularities – Finite element model
Similar to Section 4.2.1, the wheel can be modelled as a sprung mass with a Hertzian
spring located between the wheel centre and the rail, as illustrated in Figure 6.1. In
addition, it is assumed that the spring always remains perpendicular to the surface
(Bowe and Mullarkey, 2005).
Figure 6.1: Wheel modelled as a sprung mass traversing an uneven rail
Referring to Figure 4.2a, one can see the sprung mass between nodes i-1 to node i and
its free-body diagram showing irregularities on the rail in Figure 6.2. This figure
shows the Hertzian spring following the profile of the irregularities on the rail. Both
the distance from the left-hand support x and the irregularity function h are shown in
this figure. From inspection of Figure 6.2, one can modify Equation (4.4) as:
( ) ( ) ( ) ( )1 1Ly B B iU v h x v ct x h ctχ −= + = − + (6.2)
Figure 6.2: Free-body diagram of the WRC element with irregularities
Hertzian
Spring
⇒Sprung mass
Wheel Centre
1
1 1
2
2
)(xh
z
x
y
0
Rail
Wheel Centre
2LxU
2LyU
1u
1ˆzθ
1v2
ˆzθ
2u
2v
1
1i −i
x ct=
χ

Chapter 6 – Wheel rail systems with irregularities
262
Substituting Equation (6.2) into Equation (4.5) gives the following equation:
( ) ( )2 1
1 12 11 2 12
2 22 21 2 22
2 2
Lx Lx
B i LyL L
Lx LxL L
Ly Ly
U F
v ct x h ct F
U F
U F
−
− +
=
K K
K K (6.3)
Modifying Equation (4.7b) to include the effects of irregularities on the rails yields
the following equation:
( )( )( )( )
( )( )( )( )
[ ]( ) ( )
1 1 1 1
11 1 1 1
1
22 1 2 1
2 1 2 1
i i
B ii i
Ly H H
Lyi i
i i
N ct x N ct x
v ct x h ctG ct x G ct xF k k
UN ct x N ct x
G ct x G ct x
− −
−− −
− −
− −
− −
− + − − = −
− − − −
( )( )( )( )
[ ]( )
( )( )( )( )
[ ]( )
1 1 1 1
11 1 1 1
22 1 2 1
2 1 2 1
0
i i
B ii i
H H H H
Lyi i
i i
N ct x N ct x
v ct xG ct x G ct x h ctk k k k
UN ct x N ct x
G ct x G ct x
− −
−− −
− −
− −
− −
−− − = − + −
− − − −
( )( )( )( )
[ ]( )
( )( )( )( )
( )
1 1 1 1
11 1 1 1
22 1 2 1
2 1 2 1
i i
B ii i
H H H
Lyi i
i i
N ct x N ct x
v ct xG ct x G ct xk k k h ct
UN ct x N ct x
G ct x G ct x
− −
−− −
− −
− −
− −
−− − = − +
− − − −
(6.4)
where the irregularity function ( )h ct has been isolated. Examining the second term on
the right hand side of Equation (6.4), it can be concluded that the effects of the
irregularities are simulated by applying forces and moments to the nodes of a
particular beam segment. The nodal forces and moments are the product of the
Hertzian spring stiffness, the irregularity height and the element shape function. Next
by modifying Equation (4.12c) to include irregularities, one gets:

Chapter 6 – Wheel rail systems with irregularities
263
[ ][ ] [ ]
1
1
2 1 1 2 2 2
2
2
0 0
0 0
ˆ0 0
0 0
ˆ1 1
z
Ly H H Ly
z
v
F k N G N G k Uv
θ
θ
= − +
− −
[ ] ( )
0
0
0
0
1
Hk h ct
+ −
−
(6.5)
Again, inspecting the second term on the right-hand side of Equation (6.5), it can be
concluded that the effects of the irregularities also require that a nodal force be
applied to the wheel, which is the product of the Hertzian spring stiffness and the
irregularity height.
The Hertzian extension must also be modified to include the effects of the irregularity
function h and takes the form of Equation (6.6), which is found by substituting
Equation (6.2) into (B.109b), where α is equal to 0o
and β is equal to 90o
for the
vertical spring. The contact element of ANSYS is unsuitable for modelling
irregularities as its equation for extension does not include function h.
[ ] [ ]1 2
1 2
extension cos cos sin cos cos sinLx Lx
Ly Ly
U U
U Uβ α β β α β
= − +
(6.6a)
[ ]( ) ( )
1
1
2
2
extension 0 1 0 1
Lx
B i
Lx
Ly
U
v ct x h ct
U
U
−
− +
= −
(6.6b)
As explained in Chapter 4, a negative extension, i.e. compression, indicates that
contact exists between the wheel and the rail, while a positive extension, i.e. tension,
means that there is no contact; thus all stiffness matrices, forces and moments related
to that particular wheel are set equal to zero when the extension is positive.

Chapter 6 – Wheel rail systems with irregularities
264
6.2.2 Unsprung wheel incorporating rail irregularities – Modal model
Figure 6.3 presents an unsprung mass Mw traversing a section of beam at a constant
speed c. As the unsprung mass travels along the beam, it is assumed that it remains in
direct contact with the beam at all times while following the vertical profile of the
irregularities h.
Figure 6.3: Unsprung wheel traversing a beam with irregularities
Recalling Equation (5.5), the differential equation governing the vibration of a beam
subjected to a moving unsprung wheel mass can be expressed as:
( ) ( ) ( )( )( )
4 2 2
4 2 2
, ,w w
v x t v x t d Y tEI m M M g x X t
x t dtδ
∂ ∂+ = − − −
∂ ∂ (6.7)
Next, one modifies Equation (5.6) to include the irregularity function as follows:
( ) ( )( )
( )( )
,x X t x X t
Y t v x t h x= =
= + (6.8)
Equation (6.8) is the vertical position of the unsprung mass, which is the beam
deflection plus the irregularity function. The vertical velocity of the unsprung mass
with irregularities can then be written as follows:
Mw
z
x
( )dX tc
dt=
y
h

Chapter 6 – Wheel rail systems with irregularities
265
( ) ( )( )
( )( )
( ) ( )( )
( ), ,x X t x X t x X t
dY t v x t v x t dX t dh x dX t
dt t x dt dx dt= = =
∂ ∂= + +
∂ ∂ (6.9)
Furthermore, its vertical acceleration is equal to:
( ) ( )( )
2 2
2 2
,x X t
d Y t v x t
dt t=
∂=
∂
( )( )
( ) ( )( )
( ) ( ) ( )( )
( )2 2 2
2 2
, , ,2
x X t x X t x X t
v x t dX t v x t dX t dX t v x t d X t
x t dt x dt dt x dt= = =
∂ ∂ ∂+ + +
∂ ∂ ∂ ∂
( )( )
( ) ( ) ( )( )
( )2 2
2 2x X t x X t
d h x dX t dX t dh x d X t
dx dt dt dx dt= =
+ + (6.10)
Substituting Equation (6.10) into (6.7) yields
( ) ( ) ( )( )
( )( )
( )4 2 2 2
4 2 2
, , , ,2
w x X t x X t
v x t v x t v x t v x t dX tEI m M
x t t x t dt= =
∂ ∂ ∂ ∂+ = − + +
∂ ∂ ∂ ∂ ∂
( )( )
( ) ( ) ( )( )
( )2 2
2 2
, ,x X t x X t
v x t dX t dX t v x t d X tg
x dt dt x dt= =
∂ ∂+ +
∂ ∂
( )( )
( ) ( ) ( )( )
( )( )( )
2 2
2 2x X t x X t
d h x dX t dX t dh x d X tx X t
dx dt dt dx dtδ
= =
+ + −
(6.11)
which extends Equation (5.9) to include irregularity terms. Equation (6.11) is then
solved by the method of superposition using Equation (5.10), which then leads to the
elimination of the fourth-order derivative of ( )n xφ using Equation (C.7 ) and (C.12b),
and finally both sides of the equation are multiplied by ( )i xφ and integrated along the
length of the beam using Equation (C.21) and (C.22) to give the following equation:
( ) ( ) ( ) ( )( )4
1 1 1
N N N
n n in n in w n n
n n n
EI r t a L m r t L M r t X tδ δ φ= = =
+ = −
∑ ∑ ∑&& &&

Chapter 6 – Wheel rail systems with irregularities
266
( )( ) ( )( )
( )( ) ( )( )
2
1 1
2N N
n n n n
n n
dX t dX tr t X t r t X t
dt dtφ φ
= =
′ ′′+ +
∑ ∑&
( )( ) ( )( )
2
21
N
n n
n
d X tr t X t g
dtφ
=
′+ +∑
( ) ( )( )
( ) ( )( ) ( )( )
2 2 2
2 2, = 1, 2, 3, ...
ix X t x X t
dX t d h x d X t dh xX t i N
dt dx dt dxφ
= =
+ +
(6.12)
where 1in
δ = when i n= , and 0in
δ = when i n≠ . Rearranging Equation (6.12) in the
order of the mass, damping and stiffness terms with the forcing term on the right-hand
side gives the following:
( )( ) ( )( ) ( )1
N
in w i n n
n
mL M X t X t r tδ φ φ=
+∑ &&
( )( )( ) ( )( ) ( )
1
2N
w i n n
n
dX tM X t X t r t
dtφ φ
=
′+
∑ &
( )( )( ) ( )( )
2
4
1
N
in n w i n
n
dX tEIL a M X t X t
dtδ φ φ
=
′′+ +
∑
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t r t
dtφ φ
′+
( ) ( )( )
( ) ( )( ) ( )( )
2 2 2
2 2, = 1, 2, 3, ...
w ix X t x X t
dX t d h x d X t dh xM g X t i N
dt dx dt dxφ
= =
= − + +
(6.13)
Expanding Equation (6.13) into matrix form gives:
1
2
3
1 0 0 ... 0
0 1 0 ... 0
0 0 1 ... 0
...... ... ... ... ...
0 0 0 ... 1 N
r
r
mL r
r
&&
&&
&&
&&
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
r
M r
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
+
&&
&&
&&
&&

Chapter 6 – Wheel rail systems with irregularities
267
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
2 ...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
&
&
&
&
411
422
433
4
0 0 ... 0
0 0 ... 0
0 0 ... 0
...... ... ... ... ...
0 0 0 ... NN
ra
ra
EIL ra
ra
+
( )
1 1 1 2 1 3 1 1
2 2 1 2 2 2 3 2 2
3 1 3 2 3 3 3 3
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rdX t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′
′′ ′′ ′′ ′′ + ′′ ′′ ′′ ′′
( )
1 1 1 2 1 3 1 1
2 1 2 2 2 3 2 22
3 1 3 2 3 3 3 32
1 2 3
...
...
...
... ... ... ... ... ...
...
N
N
w N
N N N N N N
r
rd X t
M rdt
r
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
φ φ φ φ φ φ φ φ
′ ′ ′ ′ ′ ′ ′ ′
′ ′ ′ ′ + ′ ′ ′ ′
1
2
3
...
w
N
M g
φ
φ
φ
φ
= −
( ) ( )( )
1
2 22
32
...
w x X t
N
dX t d h xM
dt dx
φ
φ
φ
φ
=
−
( ) ( )( )
1
22
32
...
w x X t
N
d X t dh xM
dt dx
φ
φ
φ
φ
=
−
(6.14)
The first and second derivatives of the irregularity function given in Equation (6.1)
are:
( )1
2 2 cos
N
j
j j j
dh x xa
dx l l
π π
=
=
∑ (6.15a)
( )2
2
21
2 2 sin
N
j
j j j
d h x xa
dx l l
π π
=
= −
∑ (6.15b)
In order to compute the new reaction force under the unsprung moving mass, the
author updates Equation (5.17) with Equation (6.10) as follows:

Chapter 6 – Wheel rail systems with irregularities
268
( )( )2
2w
d Y tF t M g
dt
= + =
( )( )
( )( )
( )2 2
2
, ,2w x X t x X t
v x t v x t dX tM g
t x t dt= =
∂ ∂+ +
∂ ∂ ∂
( )( )
( ) ( ) ( )( )
( )2 2
2 2
, ,x X t x X t
v x t dX t dX t v x t d X t
x dt dt x dt= =
∂ ∂+ +
∂ ∂
( )( )
( ) ( ) ( )( )
( )2 2
2 2x X t x X t
d h x dX t dX t dh x d X t
dx dt dt dx dt= =
+
(6.16)
6.2.3 Unsprung wheel incorporating rail irregularities – Finite element model
The author now develops a finite element model which includes an unsprung moving
mass on an irregular rail. A free-body diagram of the unsprung mass traversing a
beam segment is shown in Figure 6.4. The diagram indicates that the coordinate
system where x is positive along the beam element, y is positive upward and z is
positive outwards. The deflection in the y-direction and rotation about the z-axis are
defined by R1 and R2, respectively, at local node 1 of the beam, while R3 and R4 are
the deflection in the y-direction and rotation about the z-axis at local node 2 of the
beam.
Figure 6.4: Unsprung wheel traversing a beam segment with irregularities
One begins by substituting Equation (5.18) into (6.11) giving:
Mw
z
x
( )dX tc
dt=
y
h
R1 R3
R2
R4 0 1 2

Chapter 6 – Wheel rail systems with irregularities
269
( ) ( ) ( ) ( )4 4
1 1
iv
n n n n
n n
EI R t x m R t x= =
Φ + Φ∑ ∑ &&
( ) ( )( )( )
( ) ( )( )4 4
1 1
2w n n n n
n n
dX tM R t X t R t X t
dt= =
′= − Φ + Φ
∑ ∑&& &
( )( ) ( )( )
( )( ) ( )( )
2 24 4
21 1
n nn n n
n n
dX t d X tR t X t R t X t g
dt dt= =
′′ ′+ Φ + Φ +
∑ ∑
( ) ( )( )
( ) ( )( ) ( )( )
2 2 2
2 2x X t x X t
dX t d h x d X t dh xx X t
dt dx dt dxδ
= =
+ + −
(6.17)
In order to apply the Galerkin’s method of weighted residuals one multiplies both
sides of Equation (6.17) by ( )i
xΦ , i = 1, 2, 3 and 4, and integrates along the element
length as follows:
( ) ( )( ) ( )( ) ( )4
1 0
( )
l
i n w i n n
n
m x x dx M X t X t R t=
Φ Φ + Φ Φ +
∑ ∫ &&
( )( )( ) ( )( ) ( )
4
1
2 w i n n
n
dX tM X t X t R t
dt=
′Φ Φ +
∑ &
( ) ( )( )
( )( ) ( )( )2
4
1 0
l
iv
i n w i nn
n
dX tEI x x dx M X t X t
dt=
′′Φ Φ + Φ Φ +
∑ ∫
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t R t
dt
′Φ Φ
( )( )w iM g X t= − Φ
( ) ( )( )
( ) ( )( ) ( )( )
2 2 2
2 2, = 1, 2, 3, and 4
w ix X t x X t
dX t d h x d X t dh xM X t i
dt dx dt dx= =
− + Φ
(6.18)
Substituting Equation (5.25) into (6.18) gives the following equation as:
( ) ( )( ) ( )( ) ( )4
1 0
( )
l
i n w i n n
n
m x x dx M X t X t R t=
Φ Φ + Φ Φ +
∑ ∫ &&

Chapter 6 – Wheel rail systems with irregularities
270
( )( )( ) ( )( ) ( )
4
1
2w i n n
n
dX tM X t X t R t
dt=
′Φ Φ +
∑ &
( ) ( )( )
( )( ) ( )( )2
4
1 0
l
i n w i nn
n
dX tEI x x dx M X t X t
dt=
′′ ′′ ′′Φ Φ + Φ Φ +
∑ ∫
( )( )( ) ( )( ) ( )
2
2w i n n
d X tM X t X t R t
dt
′Φ Φ
( )( ) ( ) ( ) ( ) ( )1 2 1 2ˆ ˆ ˆ ˆ0 0w i i i i iM g X t Q l Q M l M′ ′= − Φ + Φ + Φ + Φ + Φ
( ) ( )( )
( ) ( )( ) ( )( )
2 2 2
2 2, = 1, 2, 3, and 4
w ix X t x X t
dX t d h x d X t dh xM X t i
dt dx dt dx= =
− + Φ
(6.19)
With the aid of Figure B.3, Equation (6.19) can then be reduced to the following
matrix form:
1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41 1
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42 2
3 1 3 2 3 3 3 4 3 1 3 2 3 3 3 430
4 1 4 2 4 3 4 4 4 1 4 2 4 3 4 44
l
w
R R
R Rm dx M
R
R
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ +
Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ
∫
&& &&
&& &&
&& &
&&
3
4
R
R
&
&&
( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
3 1 3 2 3 3 3 4 33
4 1 4 2 4 3 4 4 4
2 w
R
dX t RM EI
dt R
R
′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′ ′ ′ ′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
&
&
&
&
1
2
1 3 2 3 3 3 4 30
4 1 4 2 4 3 4 4 4
l
R
Rdx
R
R
′′ ′′ ′′ ′′ ′′ ′′ Φ Φ Φ Φ Φ Φ Φ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
∫
( ) ( )1 1 1 2 1 3 1 4 1 1 1 2 1 3 1 41
2 2
2 1 2 2 2 3 2 4 2 1 2 2 2 3 2 42
2
3 1 3 2 3 3 3 4 3 13
4 1 4 2 4 3 4 4 4
w w
R
RdX t d X tM M
Rdt dt
R
′′ ′′ ′′ ′′ ′ ′ ′ ′ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ΦΦ ′′ ′′ ′′ ′′ ′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ + +
′′ ′′ ′′ ′′ ′ Φ Φ Φ Φ Φ Φ Φ Φ Φ Φ ′′ ′′ ′′ ′′Φ Φ Φ Φ Φ Φ Φ Φ
1
2
3 2 3 3 3 4 3
4 1 4 2 4 3 4 4 4
R
R
R
R
′ ′ ′ Φ Φ Φ Φ Φ Φ
′ ′ ′ ′Φ Φ Φ Φ Φ Φ Φ Φ
( ) ( )( )
( ) ( )( )
11 1 12 2 2
2 1 2 2
2 2
3 3 32
4 4 42
ˆ
ˆ
ˆ
ˆ
w w wx X t x X t
Q
M dX t d h x d X t dh xM g M M
dt dx dt dxQ
M
= =
Φ Φ Φ Φ Φ Φ
= − + − − Φ Φ Φ Φ Φ Φ
(6.20)

Chapter 6 – Wheel rail systems with irregularities
271
Comparing Equation (6.14) with Equation (6.20), the reader can clearly see that the
two equations are very similar in the representation of the irregularity function. Since
the irregularity function comprises the summation of several sine curves, the first and
second derivatives of this irregularity function are not discontinuous in the finite
element solution, as illustrated by Equation (6.15).
6.2.4 Sprung wheel incorporating lateral rail irregularities – WRC element
In the following section, the author develops the wheel-rail contact (WRC) element
incorporating lateral rail irregularities. Similar to Figure 4.4b, the lateral spring
element is presented in the x-z plane. Hence, the free-body diagram for the lateral
spring element is the same as Figure 6.2 with a change of notation and the direction of
the nodal moments. The free-body diagram with lateral irregularities on the rail is
shown in Figure 6.5. The updated coordinate system now has x positive along the
beam element, y positive inwards and z positive upwards. The deflection in the x, z
plane and rotation about y-axis are denoted as u, w and y
θ , respectively. The lateral
irregularity function f is positive upwards.
Figure 6.5: Free-body diagram of the WRC element with lateral irregularities
Lateral
Spring
1
1 1
2
2
( )f x y
x
z
0
2LxU
2LzU
1u
1ˆ
yθ
1w 2ˆ
yθ
2u
2w
1
ct
1i − i
χ

Chapter 6 – Wheel rail systems with irregularities
272
From inspection of Figure 6.5, one can modify Equation (4.31) as follows:
( ) ( ) ( ) ( )1 1Lz B B iU w f x w ct x f ctχ −= + = − + (6.21)
Substituting Equation (6.21) into Equation (4.28) gives the following equation:
( ) ( )2 1
12 11 2 12 1
22 21 2 22 2
2 2
Lx Lx
B iL L Lz
LxL L Lx
Ly Lz
U F
w ct x f ct F
U F
U F
−
− +
=
K K
K K (6.22)
Modifying Equation (4.34b) to include the effects of irregularities on the rails yields
the following equation:
( )( )( )( )
( )( )( )( )
[ ]( ) ( )
1 1 1 1
1 1 1 1 1
1
2 1 2 1 2
2 1 2 1
i i
i i B i
Lz H H
i i Lz
i i
N ct x N ct x
G ct x G ct x w ct x f ctF k k
N ct x N ct x U
G ct x G ct x
− −
− − −
− −
− −
− −
− − − − − + = −
− − − − − −
( )( )( )( )
[ ]( )
( )( )( )( )
[ ]( )
1 1 1 1
11 1 1 1
22 1 2 1
2 1 2 1
0
i i
B ii i
H H H H
Lyi i
i i
N ct x N ct x
w ct xG ct x G ct x f ctk k k k
UN ct x N ct x
G ct x G ct x
− −
−− −
− −
− −
− −
−− − − − = − + −
− − − − − −
( )( )( )( )
[ ]( )
( )( )( )( )
( )
1 1 1 1
1 1 1 11
2 1 2 12
2 1 2 1
i i
i iB i
H H H
i iLz
i i
N ct x N ct x
G ct x G ct xw ct xk k k f ct
N ct x N ct xU
G ct x G ct x
− −
− −−
− −
− −
− −
− − − − − = − +
− − − − − −
(6.23)
where the lateral irregularity function ( )f ct has been isolated. Examining the second
term on the right hand side of Equation (6.23), it can be concluded that the effects of
the irregularities are simulated by applying forces and moments to the nodes of a

Chapter 6 – Wheel rail systems with irregularities
273
particular beam segment. The nodal forces and moments are the product of the lateral
spring stiffness, the irregularity height and the element shape function. Next by
modifying Equation (4.39b) to include irregularities, one gets:
[ ][ ] [ ]
1
1
2 1 1 2 2 2
2
2
0 0
0 0
ˆ0 0
0 0
ˆ
1 1
y
Lz H H Lz
y
w
F k N G N G k Uw
θ
θ
= − − − + − −
[ ] ( )
0
0
0
0
1
Hk f ct
+ − −
(6.24)
Again, inspecting the second term on the right-hand side of Equation (6.24), it can be
concluded that the effects of the irregularities also require that a nodal force be
applied to the wheel, which is the product of the lateral spring stiffness and the
irregularity height.
The extension in the lateral spring must also be modified to include the effects of the
irregularity function f and takes the form of Equation (6.25a), which is found by
substituting Equation (6.21) into (B.109b), where α is equal to 270o
and β is equal to
0o
for the lateral spring. The contact element of ANSYS is unsuitable for modelling
irregularities as its equation for extension does not include function f.
[ ] 1
1
extension cos cos cos sinLx
Lz
U
Uβ α β α
= − −
[ ] 2
2
cos cos cos sinLx
Lz
U
Uβ α β α
+ −
(6.25a)
[ ]( ) ( )
1
1
2
2
extension 0 1 0 1
Lx
B i
Lx
Lz
U
w ct x f ct
U
U
−
− +
= −
(6.25b)

Chapter 6 – Wheel rail systems with irregularities
274
6.3 Validating systems with irregularities
In order to validate both the sprung and unsprung models including irregularities, the
author compares the results from the models with suitable results obtained from the
literature. The author also conducts a static analysis of the sprung and unsprung
system on an irregular rigid rail and beam.
The beam and vehicle properties adopted in the following examples from Section
6.3.1 to 6.3.2 are similar to those of Section 5.4.1, which modelled to the centre span
of the Boyne Viaduct Railway Bridge, as a simply supported beam. The beam has a
length L of 80.77 m, a Young’s modulus of elasticity E of 2.05x108 kN/m
2, moment
of inertia I of 1.22 m4, mass per unit length m of 1.1775 t/m and Poisson’s ratio ν of
0.3. Using Equation (C.48) the first natural frequency of the simply supported beam
1ω is 22.048 rad/sec, which is equal to 3.51 Hz. The sprung or unsprung wheel mass
Mw is 9.3 t. In Section 6.3.2, only the sprung wheel is positioned on rigid rails at a
distance of 10 m to the left of the left-hand support, and must negotiate the
irregularities on the rigid rail before it enters the beam. The irregularity function
chosen has a wavelength 1 of 5 m,l while the irregularity height is 10 mm; thus the
amplitude 1 is 5 mma or 0.005 m. This irregularity function used can be seen in
Figure 6.6.
The gravitational and damping effects of the beam are again ignored. The Newmark-β
time integration method with 1000 equal time steps is used to solve the transient
analysis. The initial displacement and velocity of the wheel and beam are equal to
zero. Six modes are used to describe the modal solution. In the finite element system
the beam is discretized into 10 beam elements.

Chapter 6 – Wheel rail systems with irregularities
275
6.3.1 Static analysis of beam with irregularities
One begins by conducting a static analysis of the three models. In Figure 6.6 the
author presents the vertical displacement at the centre of the wheel at different
positions along the beam, where the left-hand support of the bridge coincides with the
origin. From the result, it can be clearly seen that both the sprung and unsprung
wheels follow the profile of irregularity on the rigid rail. All models experience
positive displacements when the irregularity function is positive and negative
displacements when the irregularity function is negative.
-0.010
-0.005
0.000
0.005
0.010
0.0 1.0 2.0 3.0 4.0 5.0
Position along rigid rail (m)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Irregularity function
WRC Element - Sprung Wheel
FEM & Modal - Unsprung Wheel
Figure 6.6: Static analysis of developed systems with irregularities along a beam
6.3.2 Transient analysis of beam with irregularities
In this example, the author examines the dynamic effects caused by the sprung and
unsprung wheel traversing a beam, whose upper flange is irregular. The two speeds
chosen are a slow speed c of 2.778 m/s (10 km/hr) and a medium speed c = 22.778
m/s (82 km/hr). The vertical displacement and bending moment at mid-span of the
beam as a function of time due to the wheel traversing the beam with irregularities is
shown in Figure 6.7. The vertical displacement and vertical acceleration as well as

Chapter 6 – Wheel rail systems with irregularities
276
contact force between the wheel and beam can be seen in Figure 6.8. From inspection
of Figures 6.7 and 6.8, one can see that all models give very similar results as the
wheel traverses this beam with an irregular surface at 10 km/hr. It can also be seen
from each plot that the wheel enters the beam at 0.124ct L = and exits the beam at
1.124ct L = , as indicated by the vertical dashed lines in each plot.
-0.006
-0.005
-0.004
-0.003
-0.002
-0.001
0.000
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
0
500
1000
1500
2000
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
Figure 6.7: (a) Vertical displacement; (b) bending moment at mid-span of the
beam as a function of time due to a wheel traversing at 10 km/hr
across the beam with irregularities
Wheel arriving on LHS
Wheel arriving on RHS
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
277
-0.015
-0.010
-0.005
0.000
0.005
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
-1.10
-1.05
-1.00
-0.95
-0.90
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
Figure 6.8 (a) Vertical displacement of wheel; (b) vertical acceleration of wheel;
(c) the contact force between the wheel and beam due to a wheel
traversing at 10 km/hr across the beam with irregularities
(a)
(b)
(c)

Chapter 6 – Wheel rail systems with irregularities
278
Next using the same irregularity function, the author examines the dynamic effects on
the bridge and of the wheel at a medium speed c of 22.778 m/s (82 km/hr). The
vertical displacement and bending moment at mid-span of the beam due to this
particular speed and irregularity function are shown in Figure 6.9, while Figure 6.10
presents the vertical displacement and acceleration of the wheel as well as the contact
force between the wheel and beam as a function of time.
-0.010
-0.008
-0.006
-0.004
-0.002
0.000
0.002
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
-500
0
500
1000
1500
2000
2500
3000
3500
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
Figure 6.9: (a) Vertical displacement; (b) bending moment at mid-span of the
beam as a function of time due to a wheel traversing at 82 km/hr
across the beam with irregularities
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
279
-0.015
-0.010
-0.005
0.000
0.005
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
-10
-8
-6
-4
-2
0
2
4
6
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
-2.50
-2.00
-1.50
-1.00
-0.50
0.00
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Dimensionless time ct /L
Co
nta
ct
forc
e / S
tati
c w
eig
ht
WRC Element - Sprung Wheel
Modal (6 modes) - Unsprung Wheel
Finite Element System - Unsprung Wheel
Figure 6.10 (a) Vertical displacement of wheel; (b) vertical acceleration of wheel;
(c) the contact force between the wheel and beam due to a wheel
traversing the beam with irregularities, travelling at 82 km/hr
(a)
(b)
(c)

Chapter 6 – Wheel rail systems with irregularities
280
As before, the reader can clearly see that Figures 6.9 and 6.10 again show that all
three developed systems give very similar results as the sprung or unsprung wheel
traverses the irregularity function at 82 km/hr. As a final note, the times of execution
of the above example for all three developed systems incorporating irregularities are
presented in Table 6.1. In each simulation, an Intel Core 2.13 GHz processor with
2048 RAM with 1000 equal time-steps is used. The results show that the unsprung
finite element method (FEM) solves twice as fast as the modal unsprung model, and
approximately three times faster than the sprung finite element model.
Table 6.1 Time of execution for the three developed systems with irregularities
Timesteps Time of execution in sec
WRC Modal FEM
1000 178 124 61
6.3.3 Manchester Benchmark simulations using the three models
In the previous two sections, the author has shown that the three models produce
similar results. One is now in a position to compare the results from these systems
with simulations and results from the literature, in particular the author investigates
the dynamic response of a twin-axle freight wagon (Benchmark Vehicle 2) traversing
a track with lateral or vertical irregularities (Track Case 3 or 4) in accordance with the
Manchester Benchmark for Rail Vehicle Simulation, Iwnicki (1999). The natural
frequencies obtained from the vehicle body of the twin-axle freight wagon using the
modal analysis in ANSYS finite element program are compared with some typical
values from the Manchester Benchmark report in Table 6.2. It can be seen from Table
6.2 that the ANSYS results are within a couple percent of the results from the finite

Chapter 6 – Wheel rail systems with irregularities
281
element program Vampire, and these results are comparable with other finite element
results.
Table 6.2 Natural frequencies of vehicle body of the twin-axle freight wagon
used in the Manchester Benchmark study (Iwnicki, 1999)
Mode Frequency (Hz)
ANSYS Vampire Other participants
Lateral oscillation 1.069 1.043 0.90 - 1.05
Bouncing 2.075 2.078 2.08 - 2.27
Pitching 2.164 2.298 2.08 - 2.32
Rolling 2.642 2.656 2.58 - 2.90
Yawing 2.729 2.736 2.60 - 2.72
To explain the different vehicle modes, Figure 6.11 presents all six modes that a
railway vehicle can experience as it travels along a rail. Longitudinal oscillation,
bouncing and lateral oscillation are motions parallel to the x, y and z-axis,
respectively. Rolling, yawing and pitching are rotational motions about the x, y, and z-
axis, respectively.
y
x
y
z
Longitudinal oscillation Rolling
x
y
x
z
Yawing Bouncing
(a)
(b) (e)
(d)

Chapter 6 – Wheel rail systems with irregularities
282
Figure 6.11: Six modes that the railway vehicle can experience as it travels along
the rail (a) longitudinal oscillation; (b) bouncing; (c) lateral
oscillation; (d) rolling; (e) yawing; (f) pitching (Iwnicki, 2006)
In this first simulation, the vehicle begins on smooth rails and must travel a distance
of 50 m before it undergoes five lateral sinusoidal irregularities as shown in Figure
6.12. Once the vehicle has traversed the five lateral irregularities, the rails become
smooth again. The lateral irregularities on each rail are in-phase with each other. Both
have a wavelength of 11.88 m and a peak-to-peak height of 31.75 mm. In the
Manchester Benchmark for Rail Vehicle Simulation (Iwnicki, 1999) this track is
known as Track Case 3. For this track, the vehicle traverses the rail at a constant
speed of 22.5 m/s (81 km/hr)
Figure 6.12 Plan view of lateral irregularities – Track Case 3 (Iwnicki, 1999)
x
z
Lateral oscillation
x
y
Pitching
(c) (f)

Chapter 6 – Wheel rail systems with irregularities
283
The lateral displacement of the leading wheel relative to the track and the lateral
displacement of the vehicle body as a function of time are plotted in Figures 6.13 and
6.14, respectively. The results presented in Figure 6.13a and 6.14a are obtained from
the author’s developed WRC element model, while the results in Figure 6.13b and
6.14b are taken from Iwnicki (1999) studies.
-50
-40
-30
-20
-10
0
10
20
30
40
50
0 50 100 150
Distance Along Track (m)
La
tera
l D
isp
lac
em
en
t (m
m)
Leading Wheel - WRC
Left Track - WRC
Right Track - WRC
Figure 6.13 Lateral displacement of leading wheelset relative to the track as a
function of time: (a) author’s model; (b) Iwinicki (1999). p. 34, Fig 24
(b)
(a)

Chapter 6 – Wheel rail systems with irregularities
284
-6
-4
-2
0
2
4
6
0 50 100 150
Distance Along Track (m)
La
tera
l D
isp
lac
em
en
t (m
m)
Vehicle Body - WRC
Figure 6.14 Lateral displacement of the vehicle body as a function of time: (a)
author’s models; (b) Iwinicki (1999). p. 34, Fig 23
Examining the results in Figure 6.14, the reader can see that the lateral displacement
of the vehicle body is somewhat different than the results from the literature.
Nevertheless, the lateral displacement of the leading wheelset shown in Figure 6.13
has good agreement with Iwinicki (1999) results. The periodic lateral movement of
axles known as the Klingel movement (Esveld, 1989) has been omitted from the
author’s model, which could explain the differences between Figure 6.14a and 6.14b.
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
285
In this next simulation, the vehicle again begins on smooth rail and must travel a
distance of 50 m before it undergoes any vertical irregularities. Beyond 50 m, from
the starting position, the vehicle is then subjected to vertical sinusoidal irregularities,
with a wavelength of 9 m and peak-to-peak height of 20 mm as shown in Figure 6.15.
During this particular simulation, the vehicle begins with an initial speed of 20 m/s
(72 km/hr) as it travels along the smooth rail for 50 m. Then between the distances 50
to 250 m, from its original starting position, the speed of the vehicle is increased
linearly from 20 to 24 m/s (86.4 km/hr) with an acceleration of 0.44 m/s2. Beyond 250
m, the vehicle travels with a constant speed of 24 m/s for another 120 m. It should be
noted that the acceleration term ( )2 2d X t dt in the unsprung model is activated in
this solution.
Figure 6.15 Elevation view of vertical irregularities – Track Case 4 (Iwnicki, 1999)
The vertical displacement of the vehicle body and the vertical displacement of the
leading wheelset relative to the track as a function of time are plotted in Figures 6.16
and 6.17, respectively. As before, the results in Figure 6.16a and 6.17a are obtained
from the author’s developed models, while the results in Figure 6.16b and 6.17b are
found in Iwnicki (1999) studies. It can be seen from Figures 6.16a and 6.17a that the
results of the moving sprung model with irregularities are very similar to the results of

Chapter 6 – Wheel rail systems with irregularities
286
the moving unsprung model with irregularities. In addition, by comparing Figure
6.16a with 6.16b, the reader can see that the results of the author’s models are
comparable with the results obtained from the Manchester Benchmark report.
Moreover, the results in Figures 6.17a and 6.17b behave in a similar manner.
0
3
6
9
12
15
0 50 100 150 200 250 300
Distance Along Track (m)
Ve
rtic
al D
isp
lac
me
nt
(mm
)
Unsprung Model - FEM
Sprung Model - WRC
Figure 6.16: Vertical displacement at the centre of the vehicle body as a function of
time: (a) author’s models; (b) Iwinicki (1999). p. 37, Fig 29
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
287
0
5
10
15
20
25
0 50 100 150 200 250 300
Distance Along Track (m)
Ve
rtic
al D
isp
lac
me
nt
(mm
)
Unspung Model - FEM Spung Model - WRC
Figure 6.17: Vertical displacement of the leading wheelset relative to the track as a
function of time: (a) author’s models; (b) Iwinicki (1999). p 37, Fig 30
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
288
6.4 Boyne Viaduct with irregularities along the rail
After establishing that the author’s models are suitable for simulating track
irregularities, the author is now in a position to investigate the effects of a three-
dimensional train traversing the Boyne Viaduct with rail irregularities. To ensure the
bridge does not suffer any initial shock due to the irregularities, the front wheel of the
train is positioned on rigid rail at a distance of 10 m to the left of the left support. This
also allows the train to undergo pitching or rolling motion prior to entering the bridge.
In the following examples, the train comprises a single six-axle 201 Class locomotive
and a single four-axle Mark 4 railway coach. This train model has a computational
time half that of the train model used in Section 4.4.5. In the following sub-sections,
the author analyses the dynamic response of the Boyne Viaduct and railway vehicle
subjected to four types of irregularity function:
1. Single irregularity function, in-phase on each rail, inducing pitching motion
2. Single irregularity function, out-of-phase on each rail, inducing rolling motion
3. Multiple random irregularity functions on each rail
4. Single lateral irregularity function, in-phase on each rail
In addition, the author examines the effects of the train traversing irregularity
functions with short and long wavelengths. In one example, a wavelength 1 of 5l m
(short) is used, while in the other a wavelength 1 of 40l m (long). The height is 10
mm; thus, 1 5 mma = or 0.005 m as shown in Figure 6.18. In each simulation, the
train travels along the uneven track at a constant speed c of 22.78 m/s (82 km/hr),
which is half its maximum operating speed. For convenience, the train is now
modelled using sprung wheels; nevertheless, Section 6.3 has shown that the unsprung
wheel system is an equally suitable method for modelling irregularities.

Chapter 6 – Wheel rail systems with irregularities
289
-10
-5
0
5
10
-40 -20 0 20 40 60 80 100 120
Distance Along Track (m)
Ve
rtic
al P
rofi
le (
mm
)
Short Wave Irregularity - 5 m
Long Wave Irregularity - 40 m
Figure 6.18: Vertical profile of two types of irregularity function considered
6.4.1 Boyne Viaduct with vertical irregularities on each rail in-phase
In this first sub-section, each rail along the Boyne Viaduct is given in-phase
irregularities, thus, inducing a vehicle pitching motion (rotation about the z-axis) as
the vehicle travels along the rail. The two irregularity functions examined are shown
in Figure 6.18, one has a wavelength 1 of 5l m (short) and the other has a wavelength
2 of 40l m (long). The vertical displacement, axial force and bending moment at mid-
span of the Boyne Viaduct as a function of time due to the train traversing both types
of irregularities are shown in Figure 6.19.
-0.030
-0.025
-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Tme ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Short Wave Irregularity
Long Wave Irregularity
Left support Right support
Front wheel on LHS
Front wheel on RHS
Rear wheel on RHS
(a)

Chapter 6 – Wheel rail systems with irregularities
290
-1500
-1000
-500
0
500
1000
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ax
ial F
oc
e (
kN
)
Short Wave Irregularity
Long Wave Irregularity
0
50
100
150
200
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
Short Wave Irregularity
Long Wave Irregularity
Figure 6.19: (a) Vertical displacement; (b) axial force; (c) bending moment (mid-
span of the cross-beam) at mid-span of the Boyne Viaduct as a function
of time due to the train travelling at 82 km/hr across in-phase
irregularities on each rail
In Figure 6.20, the author now plots the vertical displacement of the front wheel of the
train (W1) as well as its wheel-rail contact force, while Figures 6.21 and 6.22 present
the vertical acceleration and pitching angle (rotation about z-axis), respectively, of the
vehicle body of the locomotive (V1) and railway coach (V2) as a function of time as
the train travels along the in-phase irregularities.
(b)
(c)
Bottom Chord
Top Chord

Chapter 6 – Wheel rail systems with irregularities
291
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
me
nt
(m)
Short Wave Irregularity
Long Wave Irregularity
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Short Wave Irregularity
Long Wave Irregularity
Figure 6.20: (a) Vertical displacement of wheel; (b) contact force between the front
wheel of the train and rail as a function of time due to the train
travelling at 82 km/hr over in-phase irregularities on each rail
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2) Short Wave Irregularity - Loco
Long Wave Irregularity - Loco
(a)
(b)
(a)

Chapter 6 – Wheel rail systems with irregularities
292
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2) Short Wave Irregularity - Coach
Long Wave Irregularity - Coach
Figure 6.21: Vertical acceleration of the vehicle body as a function of time
subjected to in-phase irregularities: (a) locomotive; (b) railway coach
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Pit
ch
ing
An
gle
(m
rad
)
Short Wave Irregularity - Loco
Long Wave Irregularity - Loco
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Pit
ch
ing
An
gle
(m
rad
)
Short Wave Irregularity - Coach
Long Wave Irregularity - Coach
Figure 6.22: Pitching angle of the vehicle body as a function of time subjected to in-
phase irregularities: (a) locomotive; (b) railway coach
(a)
(b)
(b)

Chapter 6 – Wheel rail systems with irregularities
293
In Figure 6.19, the dynamic response of the bridge structure for the short and long
wave irregularity functions are very similar. The results for the train for the short and
long wave irregularity functions are quite different. Yau et al. (1999) and Zhang et al.
(2001) have noted that the dynamic response of the bridge is not sensitive to
irregularities. The dynamic response of the vehicle is very sensitive to differences in
wavelength and amplitude between irregularity functions.
Studying Figure 6.20a, one can see that the front wheel of the train follows both
irregularity profiles given in Figure 6.18. Figure 6.20b then shows that the shorter
irregularity function tends to produce larger fluctuations in the contact force than the
longer irregularity function. This indicates that for the shorter irregularity the wheel is
more susceptible to separation from the rail at higher speeds. From inspection of
Figure 6.21, it can be seen that the vertical acceleration in absolute value or riding
comfort of the locomotive and railway coach is less than 1.0 m/s2, most of the time, as
recommended in Eurocodes (1990). The pitching angle of the vehicle body, measured
in radians/1000 i.e. (mrad), is shown in Figure 6.22.
Exaggerating the vertical, horizontal and lateral displacements as well as the vertical
height of the irregularity function by a factor 20, the author draws the train traversing
the Boyne Viaduct in the presence of the shortwave irregularity function, at two
different times in Figure 6.23. As shown in the diagrams, the bogies of the vehicles
are more susceptible to pitching than the vehicle body.

Chapter 6 – Wheel rail systems with irregularities
294
Figure 6.23: Animation frame taken at (a) 2.425 sec; (b) 3.785 sec for the
locomotive and railway carriage traversing the Boyne Viaduct railway
bridge at 82 km/hr in the presence of short in-phase irregularities (all
displacements and irregularity function exaggerated by a factor of 20)
(a)
(b)
Direction of travel

Chapter 6 – Wheel rail systems with irregularities
295
6.4.2 Boyne Viaduct with vertical irregularities on the rail out-of-phase by 180o
The author is now interested in the rolling effects (rotation about the x-axis) of the
vehicle. Thus, the rails have a single sinusoidal irregularity out of phase by 180o with
each other. As before, the two irregularity functions chosen are shown in Figure 6.18.
One has a wavelength 1 of 5l m (short) and the other has a wavelength 2 of 40l m
(long). The right rail is on the right hand side of the observer who is facing the
direction of travel of the train. The left rail has the same irregularity function as
shown in Figure 6.18, while the right rail has the same irregularity function that is
out-of-phase by 180o with the left rail. The vertical displacement, axial force and
bending moment at mid-span of the Boyne Viaduct as a function of time due to the
train traversing both types of irregularities are shown in Figure 6.24.
-0.030
-0.025
-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Short Wave Irregularity
Long Wave Irregularity
-1500
-1000
-500
0
500
1000
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ax
ial F
oc
e (
kN
)
Short Wave Irregularity
Long Wave Irregularity
Front wheel on LHS
Front wheel on RHS
Rear wheel on RHS
Bottom Chord
Top Chord
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
296
0
50
100
150
200
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
Short Wave Irregularity
Long Wave Irregularity
Figure 6.24: (a) Vertical displacement; (b) axial force; (c) bending moment at mid-
span of the Boyne Viaduct as a function of time due to the train
travelling at 82 km/hr across out-of-phase irregularities on each rail
Next, the author plots the vertical displacement of the front wheel of the train (W1) as
well as its wheel-rail contact force, where Figure 6.25 presents the left front wheel
and Figure 6.26 presents the right front wheel. The vertical acceleration and rolling
angle (rotation about x-axis) of the vehicle body of the locomotive (V1) and railway
coach (V2) as a function of time as the train travels along the out-of-phase
irregularities are then shown in Figures 6.27 and 6.28, respectively.
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
me
nt
(m)
Short Wave Irregularity
Long Wave Irregularity
(c)
(a)

Chapter 6 – Wheel rail systems with irregularities
297
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Short Wave Irregularity
Long Wave Irregularity
Figure 6.25: (a) Vertical displacement of left wheel; (b) contact force between the
front left wheel and rail of the train as a function of time (left rail)
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
me
nt
(m)
Short Wave Irregularity
Long Wave Irregularity
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Short Wave Irregularity
Long Wave Irregularity
Figure 6.26: (a) Vertical displacement of right wheel; (b) contact force between the
front right wheel and rail of the train as a function of time (right rail)
(b)
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
298
-1.0
-0.5
0.0
0.5
1.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2) Short Wave Irregularity - Loco
Long Wave Irregularity - Loco
-1.0
-0.5
0.0
0.5
1.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2) Short Wave Irregularity - Coach
Long Wave Irregularity - Coach
Figure 6.27: Vertical acceleration of the vehicle body subjected to out-of-phase
irregularities as a function of time: (a) locomotive; (b) railway coach
-15
-10
-5
0
5
10
15
20
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ro
llin
g A
ng
le (
mra
d)
Short Wave Irregularity (multiplied by a factor of 10)
Long Wave Irregularity
(a)
(b)
(a)

Chapter 6 – Wheel rail systems with irregularities
299
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ro
llin
g A
ng
le (
mra
d)
Short Wave Irregularity (multiplied by a factor of 10)
Long Wave Irregularity
Figure 6.28: Rolling angle of the vehicle body subjected to out-of-phase
irregularities as a function of time: (a) locomotive; (b) railway coach
Examining the results in Figure 6.24, one can see that as the train traverses the bridge
over out-of-phase irregularities, the bridge shows little additional dynamic response.
Comparing the results in Figure 6.20 with the results in Figure 6.25 and 6.26, it can be
seen that the wheels tend to correctly follow the vertical profile shown in Figure 6.18.
In addition, the shorter irregularity function gives rise to less response in Figure 6.25b
and 6.26b when compared to Figure 6.20. The vertical acceleration in absolute value
or riding comfort of both vehicle types is then shown to be less than 0.5 m/s2, most of
the time in Figure 6.27. Finally, Figure 6.28 shows that the roll angle of the vehicle
body (V1 and V2) are much larger for the long wave than for the shorter wave
irregularity function.
Exaggerating the vertical, longitudinal and lateral displacements as well as the vertical
height of the irregularity function by a factor 20, the author draws the train traversing
the Boyne Viaduct in the presence of a long wave irregularity function, in Figure 6.29.
As observed in Figure 6.28, the vehicle bodies experience rolling effects.
(b)

Chapter 6 – Wheel rail systems with irregularities
300
Figure 6.29: Animation frame taken at (a) 2.865 sec; (b) 3.800 sec for the
locomotive and railway carriage traversing the Boyne Viaduct railway
bridge at 82 km/hr in the presence of short in-phase irregularities (all
displacements and irregularity function exaggerated by a factor of 20)
(b)
(a) Right rail
Left rail
Direction of travel

Chapter 6 – Wheel rail systems with irregularities
301
6.4.3 Boyne Viaduct with random vertical irregularities on each rail
Next, the author examines the dynamic responses of both the bridge and train in the
presence of random irregularities on both tracks. The irregularity function used on
each track comprises several sine curves (N = 5); thus, simulating more realistic rail
conditions and can be seen in Figure 6.30 or equated using Equation (6.1) as follows:
Left
2 2 2 2 2 0.002 sin sin sin sin sin
8 16 24 32 40
x x x x xh
π π π π π = − − − +
(6.26a)
Right
2 2 2 2 2 0.002 sin sin sin sin sin
7 13 19 23 37
x x x x xh
π π π π π = + + + +
(6.26b)
It should be again noted that the rail on the observer’s right-hand side as he faces the
train’s direction of travel is denoted the right rail. The other rail is the left rail. As in
previous sections, the train traverses the uneven track at a constant speed c = 22.78
m/s (82 km/hr), which is half its maximum operating speed.
-10
-5
0
5
10
-40 -20 0 20 40 60 80 100 120
Distance Along Track (m)
Ve
rtic
al P
rofi
le (
mm
)
Left Rail
Right Rail
Figure 6.30: Vertical profile of the random irregularity functions on each rail
The vertical displacement, axial force in the upper and lower chord and bending
moment in the centre of the cross-beam at mid-span of the Boyne Viaduct as a
function of time is shown in Figure 6.31. For comparison purposes, the author plots
on Figure 6.31 the dynamic response of the bridge as the train traverses the bridge in
the presence of a smooth rail.
Left support Right support

Chapter 6 – Wheel rail systems with irregularities
302
-0.030
-0.025
-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Smooth Rail
Random Irregularities
-1500
-1000
-500
0
500
1000
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ax
ial F
orc
e (
kN
) Smooth Rail
Random Irregularities
0
50
100
150
200
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
Smooth Rail
Random Irregularities
Figure 6.31: (a) Vertical displacement; (b) axial force; (c) bending moment at mid-
span of the Boyne Viaduct as a function of time. The train is travelling
at 82 km/hr across random irregularities on each rail
Front wheel on LHS
Front wheel on RHS
Rear wheel on RHS
Bottom Chord
Top Chord
(a)
(b)
(c)

Chapter 6 – Wheel rail systems with irregularities
303
Next, the author plots the vertical displacement of the front wheels of the train (W1)
as well as the wheel-rail contact forces as a function of time in Figure 6.32. The
vertical acceleration, pitching angle and rolling angle of the vehicle body of the
locomotive (V1) and railway coach (V2) as a function of time are then shown in
Figures 6.33a, 6.33b and 6.33c, respectively.
-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al D
isp
lac
me
nt
(m)
Wheel on Left Rail
Wheel on Right Rail
-2.0
-1.5
-1.0
-0.5
0.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Wheel on Left Rail
Wheel on Right Rail
Figure 6.32: (a) Vertical displacement of front wheels; (b) contact force between the
fronts wheel and rail of the train as a function of time
(a)
(b)

Chapter 6 – Wheel rail systems with irregularities
304
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Loco Coach
-3.0
-2.0
-1.0
0.0
1.0
2.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Pit
ch
ing
An
gle
(m
rad
)
Loco
Coach
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75
Dimesionless Time ct /L
Ro
llin
g A
ng
le (
mra
d)
Loco Coach
Figure 6.33: (a) Vertical acceleration; (b) pitching angle; (c) rolling angle of the
vehicle body as a function of time. The train is travelling at 82 km/hr
across random irregularities on each rail
(a)
(b)
(c)

Chapter 6 – Wheel rail systems with irregularities
305
From inspection of Figure 6.31, the reader can see that the observation of Yau et al.
(1999) and Zhang et al. (2001) are true, namely that the dynamic response of the
bridge is not affected by irregularities along its rails. Figure 6.32 then shows the front
wheels of the train following the vertical profile of each rail presented in Figure 6.30,
along with the wheel-rail contact forces. Unlike previous examples, the vertical
acceleration, in absolute value, or riding comfort value of the locomotive and railway
coach, tends to barely lie within the recommended value of 1.0 m/s2 on most
occasions in Figure 6.33a. Figure 6.33b and 6.33c show that the random irregularities
induce pitching and rolling of the vehicle bodies. The locomotive tends to experience
a greater roll angle than the railway coach. Finally, Figure 6.34 presents two drawings
at different times of the train traversing the Boyne Viaduct over random irregularities
along each rail. All bridge and vehicle displacements as well as the irregularity
function have been exaggerated by a factor of 20.
(a)
Right rail
Left rail
Direction of travel

Chapter 6 – Wheel rail systems with irregularities
306
Figure 6.34: Animation frame taken at (a) 1.930 sec; (b) 3.600 sec for the
locomotive and railway carriage traversing the Boyne Viaduct railway
bridge at 82 km/hr undergoing random rail irregularities on each rail
(displacements and irregularity function exaggerated by a factor of 20)
6.4.4 Boyne Viaduct with lateral irregularities in-phase on each rail
In this final sub-section, the author examines the dynamic response of a train
traversing a track with lateral irregularities in-phase on each rail; thus, inducing a
lateral oscillation of the vehicle body. The lateral irregularity function used has a
wavelength of 1 of 40l m and a peak-to-peak height of 50 mm; hence its amplitude 1a
is 25 mm or 0.025m as illustrated in Figure 6.35. As in previous sections, the train
traverses the uneven track at a constant speed c = 22.78 m/s (82 km/hr), which is half
its maximum operating speed.
(b)

Chapter 6 – Wheel rail systems with irregularities
307
-50
-25
0
25
50
-40 -20 0 20 40 60 80 100 120
Distance Along Track (m)
La
tera
l P
rofi
le (
mm
)
Figure 6.35: Lateral profile of irregularity function considered (Plan view)
For consistency, the vertical displacement, axial force in the upper and lower chord
and bending moment in the centre of the cross-beam at mid-span of the Boyne
Viaduct as a function of time is shown in Figure 6.36. For comparison purposes again,
the dynamic response of the bridge without lateral irregularities is also shown in
Figure 6.36. Comparing Figure 6.36 with Figures 6.19, 6.24 and 6.31, the reader can
see that the lateral irregularities on the track have little dynamic effect on the Boyne
Viaduct, similar to previous observations.
-0.030
-0.025
-0.020
-0.015
-0.010
-0.005
0.000
0.005
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Ve
rtic
al D
isp
lac
em
en
t (m
)
Smooth Rail
Lateral Irregularity
Left support Right support
(a)

Chapter 6 – Wheel rail systems with irregularities
308
-1500
-1000
-500
0
500
1000
1500
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Ax
ial F
orc
e (
kN
)Smooth Rail
Lateral Irregularity
0
50
100
150
200
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Be
nd
ing
Mo
me
nt
(kN
m)
Smooth Rail
Lateral Irregularity
Figure 6.36: (a) Vertical displacement; (b) axial force; (c) bending moment at mid-
span of the Boyne Viaduct as a function of time. The train is travelling
at 82 km/hr along the track with in-phase lateral irregularities
Next, the author plots the lateral displacement of the front wheels of the train (W1) as
well as the wheel-rail contact forces as a function of time in Figure 6.37. The vertical
acceleration, lateral acceleration, rolling angle (see Figure 6.11) and yawing angle of
the vehicle body of the locomotive (V1) and railway coach (V2) as a function of time
are then shown in Figures 6.38a, 6.38b, 6.38c and 6.33d, respectively.
Bottom Chord
Top Chord
(c)
(b)

Chapter 6 – Wheel rail systems with irregularities
309
-0.050
-0.025
0.000
0.025
0.050
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
La
tera
l D
isp
lac
em
en
t (m
)
Front w heel of the locomotive (W1)
Front w heel of the railw ay coach (W7)
-2.0
-1.5
-1.0
-0.5
0.0
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Co
nta
ct
Fo
rce
/ S
tati
c W
eig
ht
Front w heel of the locomotive (W1)
Front w heel of the railw ay coach (W7)
Figure 6.37: (a) Lateral displacement; (b) vertical contact force between the 1st and
7th
wheel and the rail
-1.00
-0.50
0.00
0.50
1.00
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Ve
rtic
al A
cc
ele
rati
on
(m
/s2)
Loco (V1)
Coach (V2)
(a)
(b)
(a)

Chapter 6 – Wheel rail systems with irregularities
310
-1.00
-0.50
0.00
0.50
1.00
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
La
tera
l A
cc
ele
rati
on
(m
/s2)
Loco (V1)
Coach (V2)
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Ro
llin
g A
ng
le (
mra
d)
Loco (V1)
Coach (V2)
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
0 0.25 0.5 0.75 1 1.25 1.5 1.75
Dimensionless Time ct /L
Ya
win
g A
ng
le (
mra
d)
Loco (V1)
Coach (V2)
Figure 6.38: (a) Vertical acceleration; (b) lateral acceleration; (c) rolling angle;
(d) yawing angle of the vehicle body as a function of time. The train is
travelling at 82 km/hr across lateral irregularities on each rail
(d)
(c)
(b)

Chapter 6 – Wheel rail systems with irregularities
311
From inspection of Figure 6.37, one can see that the wheels of the train (W1 and W7)
correctly follow the lateral profile as presented in Figure 6.35. In addition, these
wheels remain in contact with the rails at all times, oscillating somewhat close to its
own static weight. The vertical and lateral acceleration, in absolute value, or riding
comfort value of the locomotive and railway coach, tends to lie well within the
recommended value of 1.0 m/s2 on all occasions as shown in Figure 6.38a and Figure
6.38b. Figures 6.38c and 6.38d show that the lateral irregularities induce rolling and
yawing of the vehicle bodies.
6.5 Discussion of results and Conclusions
The main purpose of this chapter is the modification of the sprung and unsprung
wheel-rail systems to incorporate track irregularities. ANSYS contact elements cannot
incorporate such irregularities. The author uses a deterministic irregularity function
defined by one or more sinusoidal curves to simulate uneven rail conditions. For the
sprung finite element system, it is shown that the irregularity function along the track
can be simulated for each wheel by applying a force to the wheel and forces and
moments to the nodes of the element underneath the wheel. In the unsprung system,
the acceleration terms in Equation (6.14) to (6.20) involve the second derivative of the
irregularity function.
Examining the results in Section 6.3.1 to 6.3.3, the reader can see that the sprung and
unsprung wheel systems with irregularities along the track are similar. Furthermore,
the author’s results compare reasonably well with the Manchester Benchmark
simulation i.e. a twin-axle freight wagon traversing a track with lateral or vertical
irregularities (Track Case 3 or 4). Of the three developed systems with irregularities,

Chapter 6 – Wheel rail systems with irregularities
312
the unsprung finite element model has the fastest computational time. Its
computational time is half of the modal solution and a third of the wheel-rail contact
(WRC) element. Despite this slow time, it is the preferred method used by the author
to simulate a train traversing the Boyne Viaduct with track irregularities, as it is able
to simulate wheel-rail separation.
The results presented in Section 6.4, for the Boyne Viaduct, are in good agreement
with the literature of Yau et al. (1999) and Zhang et al. (2001) that the dynamic
response of the bridge due to the presence of track irregularities are insignificant,
while the dynamic response of the vehicle is substantial. This is evident in Figures
6.19, 6.24, 6.30 and 6.36 as the dynamic responses of the Boyne Viaduct show little
change in all the different simulations, while Figures 6.20 to 6.22, 6.25 to 6.28, 6.32
to 6.33 and 6.37 to 6.38 show a significant difference with one another.
As a final note, the drawings presented by the author in Figures 6.23, 6.29 and 6.34,
clearly show the train traversing the different track profiles, which is a primary aim of
this thesis to create wheel-rail contact elements that can simulate track irregularities.

Chapter 7 – Conclusions & Recommendations
313
Chapter 7
Conclusions & Recommendations
7.1 Thesis Summary & Conclusions
This thesis primarily focuses on the dynamic interaction between trains and bridges.
The trains are simulated as moving point loads in Chapter 3. Wheels are presented as
sprung masses in Chapter 4, and as unsprung masses in Chapter 5. In Chapter 6
smooth rails are replaced with rails with irregular upper surfaces. All simulations have
been conducted using the ANSYS finite element program. The ANSYS program has
some limitations. Many of these limitations have been overcome with mathematical
algorithms developed by the author.
Train’s modelled as moving point loads are acceptable if the mass of the bridge is
substantially greater than the mass of the vehicle. This is true of large spanning
bridges (Fryba, 1996). In the moving point load system, nodal forces (simple model)
or nodal forces and nodal moments (exact model) are applied to nodes along the beam
as a function of time to represent the passage of a train. It was found that the results
from the simple model are comparable to the results from the exact model provided
that a sufficient number of beam elements is used to discretize the beam. One did find

Chapter 7 – Conclusions & Recommendations
314
that the results for the simple model with fewer beam elements were remarkably
similar to the results from the ANSYS contact element, both losing accuracy as the
number of beam elements was reduced. The exact model did not suffer a loss of
accuracy of deflection with a reduction of beam elements. However, it has a
significantly different bending moment. Applying joint equilibrium on a particular
node, one found that the summation of the two internal moments at that node was
equal to the applied moment PG1 or PG2, depending on which element the moving
force was located on. This then gave a stepped bending moment across the beam
element. It was also revealed that that the internal forces from Equation (3.6) and (3.5)
for the simple and exact models are exactly the same internal forces as from a pressure
applied between two consecutive nodes.
The next development involves the wheel-rail contact (WRC) element. It can be
described as an improvement on the moving load system. Springs are placed between
the wheel and rail. These springs can be vertical (Hertzian), longitudinal, or lateral.
The longitudinal spring allows the train to brake or accelerate. The lateral springs
provide lateral stability of the wheels in three-dimensional models. The longitudinal
and lateral features are currently unavailable within ANSYS. Through the results
presented, the reader can see that the WRC element gives remarkably similar results
to the ANSYS contact elements. Additionally, the author has shown that the ANSYS
contact element suffers a loss of accuracy in the results as the number of beam
elements in the model decreases; however, this is not the case for the WRC elements,
which maintain the correct solution. Moreover, it has been shown that if one replaces
the shape functions N1 with H1 and N2 with H2, while G1 and G2 are set to zero, the results

Chapter 7 – Conclusions & Recommendations
315
from the ANSYS contact element are equal to results from a linear WRC element.
Nonetheless, both systems give similar results for wheel-rail separation.
Subsequently, the author develops both a modal model and finite element model
incorporating unsprung wheels traversing a bridge. The unsprung wheel has the same
vertical position as the point of the beam directly underneath. However, since the
moving unsprung wheel is moving horizontally, its vertical acceleration is not the
same as the vertical acceleration of the point of the beam directly underneath. In fact
the vertical acceleration of the moving unsprung mass is equal to the local vertical
acceleration of the beam plus an additional convective term. A comparison of the final
form of the modal model with the final form of the finite element model reveals that if
the mode shapes of the modal solution are replaced by the finite element weighting
and shape functions, the finite element solution is derived, apart from the stiffness
matrix and the nodal shear force and bending moment.
These unsprung systems were developed to allow comparison with Akin & Mofid’s
(1989) paper, which omits the additional convective acceleration; thus, their solution
is inaccurate by a factor of 4 for a moving unsprung mass traversing a cantilever
beam. Moreover, it has been shown from the results that the unsprung solution is
comparable to the sprung wheel system provided that the wheel-rail contact (WRC)
element is given a reasonable large Hertzian stiffness and is not allowed undergo
separation. It can be seen from the results that the deflection at mid-span of the simply
supported beam subjected to a moving unsprung wheel (modal solution) can be
described accurately with only 3 modes, but at least 12 modes are required for an
accurate description of the shear force. Furthermore, the modal and finite element

Chapter 7 – Conclusions & Recommendations
316
model differ by only 5% in predicting the internal forces in the beam; and are
remarkable similar to each other.
Another limitation of the ANSYS finite element program was contact elements that
could not model irregularities. Fortunately, the author was able to modify the sprung
(WRC element) and unsprung models (modal and finite element models) to simulate
irregularities along the track. It was found that in order to simulate the irregularity
function in the wheel-rail contact (WRC) element; one must apply forces and
moments to the nodes of the beam element directly beneath the wheel as well as apply
a nodal force to the centre of the wheel. The unsprung systems follow a similar
development; however, the vertical acceleration of the unsprung wheel introduces
additional terms such as a second derivative with respect to x for the irregularity
function. One finds that the results from the developed models compare reasonably
well with the Manchester Benchmark simulation i.e. a twin-axle freight wagon
traversing a track with lateral or vertical irregularities (Track Case 3 or 4).
The train model used extensively throughout this thesis consists of a single 201 Class
locomotive and three Mark3 railway coaches, with an overall length from the front
axle to the rear axle of 85.88 m, traversing the Boyne Viaduct. Examining the results
from the Boyne Viaduct subjected to the train travelling at a constant speed, one finds
that the maximum dynamic amplification factor for the deflection at mid-span of the
bridge (DAFU) tends to be always less than 1.1 for realistic vehicle speeds. This value
comes from modelling the train as a series of multiple moving point forces. Modelling
the train as two-dimensional and three-dimensional railway vehicles tends to lower
the maximum DAFU to a maximum value of 1.07 for realistic vehicle speeds. The

Chapter 7 – Conclusions & Recommendations
317
results also show that the train modelled with sprung or unsprung wheels gives fairly
similar results. It has been shown in Chapter 3 that resonance of the bridge can occur
if a critical speed is reached. This critical speed can be related to: (1) the traffic speed;
and (2) the repetitive vehicle loading of the bridge. The critical speed of the three-
dimensional Boyne Viaduct is 1627 km/hr, which is an unrealistic speed; however,
several freight wagons with a short repetitive distance between axles, make the Boyne
Viaduct vulnerable to resonance as they transverse the bridge at realistic speeds, as
observed in Section 3.3.3.5
The primary aims of this thesis were to create a contact element that could be used to
simulate a train traversing a railway bridge. From the results presented in this thesis,
the reader should agree that the wheel-rail contact (WRC) element is exceedingly
robust in capturing the dynamic response of both the bridge and vehicle. This model
has the advantage of also simulating wheel-rail separation, rigid rails, braking and
accelerating as well as vertical and lateral irregularities. The unsprung modal and
finite element model may not be as versatile as the WRC element but their results are
comparable with the results from the WRC element. The unsprung models were
developed to address Akin & Mofid’s (1989) paper, which omits the convective
acceleration term. Nevertheless, many authors such as Yang and Wu (2001) are still
comparing their developed models with Akin and Mofid’s (1989) inaccurate solution,
ignoring the issue of convective acceleration (Bowe & Mullarkey, 2008)
Referring to the drawings presented by the author in Figures 6.23, 6.29 and 6.34, the
reader can see the train traversing different track profiles, which is a primary aim of
this thesis to simulate track irregularities.

Chapter 7 – Conclusions & Recommendations
318
7.2 Recommendations for future work
As this thesis has developed, the author’s dependency on the ANSYS finite element
program has reduced. Originally, it was thought that this versatile finite element
program would satisfy the author’s needs in the study of railway dynamics; however,
it has been shown throughout all the chapters that ANSYS has limitations. Its greatest
asset still remains its time-integration scheme to solve both the numerical and modal
transient analyses. Additionally, its best element became the empty mass, stiffness
and damping matrix element [MATRIX27], which would be used in the development
of the wheel-rail contact element as well as the unsprung modal and finite element
solution. Therefore, it would be highly advantageous for the author to develop a finite
element program with these mathematical implementations independent of ANSYS’s
program and license. Other developments that would be beneficial for future study
are:
• Extending the wheel-rail contact element to include the effects of a train
traversing a curved track or bridge structure.
• Modification of the modal unsprung solution to simulate more complex bridge
structures (only simple beam structures were adopted in this study).
• A more comprehensive study of two trains travelling in opposite directions i.e.
with different train lengths, speeds, weights, axle spacing and arriving times.
• Examining other Irish Rail bridges that have to experimental data recorded so
that one can verify the numerical simulations with the experimental data.
• A re-examination of the wheel-rail contact element algorithm in order to
improve its current time of execution.

Appendix A – Conventions & Elastic beam theory
319
Appendix A
Conventions & Elastic beam theory
A.1 Introduction
This appendix has three main purposes: (1) to establish a consistent sign convention
that is used throughout this thesis, (2) to develop the moment-curvature relationship,
(3) to derive the Bernoulli-Euler differential equation for an elastic beam. In addition,
the equation of motion for a spring, that is, axial motion, is derived.
A.2 Conventions
A.2.1 Convention for coordinate axes
This thesis uses a right-handed Cartesian system of mutually perpendicular axes Ox,
Oy and Oz, similar to that of Coates et al. (1997). By choosing two positive directions
for the x and the y axes, the positive direction for the z-axis is the advance of a right-
handed screw when turned from the x-axis to the y-axis through the right angle
between the positive directions of these two axes. Figure A.1 presents the right-
handed systems used throughout this thesis.

Appendix A – Conventions & Elastic beam theory
320
90o
o90
xO
zy
O x
z
y
Figure A.1: Right-handed co-ordinate system
A.2.2 Convection for moments
The convention for moment M, of magnitude M, acting on a plane is shown in Figure
A.2a. According to Coates et al. (1997), the moment can be represented by means of a
vector with double-arrow heads whose length corresponds to the magnitude M and
whose direction is normal to the plane in which it acts. The direction of the arrow is
that of the advance of a right-handed screw turned in the same sense as the moment M
(Coates et al., 1997).
A moment vector parallel to a coordinate axis is considered positive if its direction is
the same as the positive direction of that axis as illustrated in Figure A.2b.
O x
z
M
outwards
inwards
(a)
outwards

Appendix A – Conventions & Elastic beam theory
321
xM
Mz
yM
z
xO
Figure A.2: Convention for positive moments acting (a) in a plane (b) about the
coordinate axes x, y, and z (Coates et al., 1997).
A.2.3 Convections for internal forces and moments of a beam
The x-axis is the longitudinal centroidal axis of the beam, the y and z-axes are
principal axes of the beam’s cross-section with the origin located at the centroid of the
cross section; thus, the products of inertia of the cross-section are zero. If the outward
normal to the beam’s cross-section is in the positive x-coordinate direction, then the
positive axial force (P) acting through the centroid, the positive shear forces (y
Q
andz
Q ) passing through the centroid, the positive torque (T) and positive bending
moments (y
M and z
M ) are in the positive coordinate directions; however, if the
outward normal to the cross-section is in the negative coordinate direction, then the
positive axial force, shear forces and moments on that face are in the negative
coordinate direction in accordance with Newton’s Third Law (action and reaction are
equal and opposite) as shown in Figure A.3.
outwards

Appendix A – Conventions & Elastic beam theory
322
Figure A3: Positive internal forces and moments acting on the cross-sections of a
three-dimensional beam segment
A.2.4 Convection for stresses
The convention for stresses acting on an infinitesimal parallelepiped is as follows: a
normal stress is defined as positive if it is tensile and the normal stress is defined as
negative if it is compressive. In accordance with Coates et al. (1997), the positive
normal and shear stresses acting on a face are in the positive coordinate directions
when the outward normal to that face is in the positive coordinate directions, while,
the positive normal and shear stresses acting on a face are in the negative coordinate
directions when the outward normal to that face is in the negative coordinate
directions in accordance with Newton’s third law as illustrated in Figure A.4. For
shear stress the first subscript denotes the outward normal to the surface, while the
second subscript denotes the direction of the shear stress.
T
T Mz
yM
My
zM
xz
y
Qz
yQ
P
P
Qz
yQ

Appendix A – Conventions & Elastic beam theory
323
τzy
zxτ
τzx
zyτ
σz
zσ
yzτ
τyz
τyx
yxτ
σy
yσ
xστxz
τxy τxz
xyτ
z
y
xσx
Figure A.4: Positive normal and shear stresses acting on an infinitesimal
parallelepiped (Coates et al., 1997)
A.3 Moment-Curvature Relationship
Figure A.5 shows an undeformed beam axis and cross-section ab in side view in the
x-y plane. Transverse loading is applied in the y-direction and the cross-section ab
moves to its new location a b′ ′ . The cross section of the beam is perpendicular to the
axis of the undeformed beam and remains perpendicular to the axis of the deformed
beam.
dz
dx
dy

Appendix A – Conventions & Elastic beam theory
324
zθ
p'
p
a'
b'
b
a
y, v
x, u
(z-axis out)
Figure A.5: Displacement of a beam axis and cross-section in the x-y plane due to
transverse loading
The x-component of the displacement of a typical point p of the cross-section is
( ), , , :u x y z t
( ), , , sin zu x y z t y θ= − (A.1)
where y is the distance of p above the centroidal axis of the beam and z
θ is the angle
between the tangent and the x-axis. Since the angle z
θ is small, it is approximately
equal to sinz
θ or tanz
θ , but tanz
θ is the slope of the deformed beam axis; therefore:
sin tanz z z
v
xθ θ θ
∂= = =
∂ (A.2)
where ( ),v x t is the displacement of the longitudinal axis in the positive y-direction.
Substituting Equation (A.2) into (A.1) gives
vu y
x
∂= −
∂ (A.3)
vu y
x
∂= −
∂

Appendix A – Conventions & Elastic beam theory
325
x, u
z, w
c
d
d'
c'
p
p'
(y-axis in)
Figure A.6: Displacement of a beam axis and cross-section in the x-z plane
The axis and cross-section of the beam in side view are re-examined in the x-z plane.
Figure A.6 presents the undeformed beam axis and cross-section cd. A transverse
loading is applied in the z-direction and the cross-section cd moves to its new location
c d′ ′ . The x-component of the displacement of a typical point p of the cross-section is
( ), , , :u x y z t
( ), , , sin yu x y z t z θ= (A.4)
where z is the distance of p above the centroidal axis of the beam and y
θ is the angle
between the tangent and the x-axis. As before, since the angle y
θ is considered to be
small, it is approximately equal to siny
θ or tany
θ , which is the slope of the deformed
beam axis so that:
sin tany y y
w
xθ θ θ
∂= = = −
∂ (A.5)
wu z
x
∂= −
∂
yθ

Appendix A – Conventions & Elastic beam theory
326
where w is the displacement of the longitudinal axis in the positive z-direction.
Substituting Equation (A.5) into (A.4) gives:
wu z
x
∂= −
∂ (A.6)
Combining Equation (A.3) and (A.6) gives the total horizontal displacement u as:
v wu y z
x x
∂ ∂= − −
∂ ∂ (A.7)
The linear strain xx
ε in the beam fibres is:
xx
u
xε
∂=
∂ (A.8)
Substituting Equation (A.7) into (A.8) gives
2 2
2 2xx
v wy z
x xε
∂ ∂= − −
∂ ∂ (A.9)
It is assumed that the elastic beam obeys Hooke’s Law, and that Poisson’s ratio is
zero; therefore, the uniaxial stress-strain equation is:
x xxEσ ε= (A.10)
where E is Young’s modulus of elasticity. Substituting Equations (A.9) into (A.10)
gives:

Appendix A – Conventions & Elastic beam theory
327
2 2
2 2x
v wEy Ez
x xσ
∂ ∂= − −
∂ ∂ (A.11)
Figure A.7 shows that the positive bending moment acting on a cross-section whose
outward normal is in the positive x-direction can be related to the normal stress x
σ as
follows:
z x
A
M y dAσ= −∫ (A.12a)
y x
A
M z dAσ= ∫ (A.12b)
Substituting Equation (A.11) into (A.12) gives:
2 22
2 2z
A A
v wM E y dA E yzdA
x x
∂ ∂= +
∂ ∂∫ ∫ (A.13a)
2 22
2 2y
A A
w vM E z dA E yzdA
x x
∂ ∂= − −
∂ ∂∫ ∫ (A.13b)
(y-axis in)
(z-axis out)
Beam centroidal axis
z
x
dA
Beam centroidal axis
y
(b) Beam section(a) Stress distribution
M
x
y
z
σx
+y
xσ
xσ
σx
dAz
M
z
y
+z y
Figure A.7: Stress distribution on an elastic beam segment due to bending moment
Stress and moment
(z-axis out)
(y-axis in)

Appendix A – Conventions & Elastic beam theory
328
The integrals in Equation (A.13) are section properties that are defined as:
2
z
A
y dA I=∫ (A.14a)
2
y
A
z dA I=∫ (A.14b)
0A
yzdA =∫ (since y and z are principal axes) (A.14c)
where Iz and Iy are the second moment of area of the cross-section of the beam.
Substituting Equation (A.14) into (A.13) gives the moment-curvature equation of the
Bernoulli-Euler beam as:
2
2z z
vM EI
x
∂=
∂ (A.15a)
2
2y y
wM EI
x
∂= −
∂ (A.15b)
Equally, substituting Equation (A.15) into (A.11) gives the relationship between the
normal stress and the bending moment as follows:
yzx
z y
M zM y
I Iσ = − + (A.15c)
A.4 Differential equations governing the transverse deformation of a beam
In Figure A.8, an elastic beam is subjected to a transverse load ( ),yp x t , where m is
the mass per unit length and EIz is the flexural property of the beam.

Appendix A – Conventions & Elastic beam theory
329
y
z
y, v
x
L
p (x)
x dxEI , m
z
Figure A.8: Elastic beam subjected to a transverse load in the x-y plane
Figure A.9 presents a differential beam segment of length dx subjected to a transverse
load ( ),yp x t acting in the positive y direction. The shear force y
Q and bending
moment z
M acting on this particular segment obey the sign convention described in
Section A.2.3.
y
M
Q
dx
p (x)
M + dxx
Mz z
z
y
x
y, v
zy
yQ
dxQ +
Figure A.9: Free body diagram of a beam segment in the x-y plane
Recalling Equation (A.15a), the constitutive law relating bending moment to
curvature states:
2
2z z
vM EI
x
∂=
∂ (A.16)
( ),yp x t
( ),y
p x t
outward

Appendix A – Conventions & Elastic beam theory
330
For the segment, the sum of moments about the z-axis on the positive face of the free-
body diagram must be equal to zero (ignoring rotatory inertia):
( )( )2
,0
2
yzz y z
p x t dxMM dx Q dx M
x
∂ + + − + = ∂
(A.17)
Simplifying Equation (A.17) gives the following relationship between the bending
moment z
M and the shear force y
Q :
zy
MQ
x
∂= −
∂ (A.18)
Substituting Equation (A.16) into (A.18) gives
2
2y z
vQ EI
x x
∂ ∂= −
∂ ∂ (A.19)
Next, Newton’s second law is applied in the vertical y-direction:
2
2( , ) 2
y
y y by y
Q v vQ dx p x t dx m dx Q mdx
x t tω
∂ ∂ ∂+ + − − =
∂ ∂ ∂ (A.20)
where by
ω is frequency of damping of the beam in the y-direction, (see Appendix D).
Equation (A.20) reduces to the following:
2
2( , ) 2
y
y by
Q v vp x t m m
x t tω
∂ ∂ ∂+ = +
∂ ∂ ∂ (A.21)
Substituting Equation (A.19) into (A.21) gives:

Appendix A – Conventions & Elastic beam theory
331
2 2 2
2 2 22 ( , )z by y
v v vEI m m p x t
x x t tω
∂ ∂ ∂ ∂+ + =
∂ ∂ ∂ ∂ (A.22)
which is the equation of motion of an elastic beam in the y-direction.
Next the equation of motion of the beam in the x-z plane is derived. Figure A.10
shows a differential beam segment of length dx subjected to a load ( )zp x acting in
the positive z direction. The shear force z
Q and bending moment y
M acting on this
particular beam segment obey the sign convention described in Section A.2.3.
z
Q + dxx
Qz
z
y
z, w
x
z
yyy
M
xdxM +
p (x)
dx
Q
M
Figure A.10: Free body diagram of a beam segment in the x-z plane
Recalling Equation (A.15b), the constitutive law relating bending moment to
curvature states:
2
2y y
wM EI
x
∂= −
∂ (A.23)
The sum of moments about the y-axis on the positive face of the free-body diagram
must be equal to zero (ignoring rotatory inertia):
( ),zp x t
inward

Appendix A – Conventions & Elastic beam theory
332
( )( )( )
2,
02
y z
y z y
M p x t dxM dx Q dx M
x
∂+ + − + =
∂ (A.24)
Simplifying Equation (A.24) gives the following relationship between the bending
moment y
M and the shear force z
Q :
y
z
MQ
x
∂=
∂ (A.25)
Substituting Equation (A.23) into (A.25) gives
2
2z y
wQ EI
x x
∂ ∂= −
∂ ∂ (A.26)
Next, Newton’s second law is applied in the vertical z-direction:
2
2( , ) 2z
z z bz z
Q w wQ dx p x t dx m dx Q mdx
x t tω
∂ ∂ ∂+ + − − =
∂ ∂ ∂ (A.27)
where bzω is frequency of damping of the beam in the z-direction, (see Appendix D).
Equation (A.27) is simplified as follows:
2
2( , ) 2z
z bz
Q w wp x t m m
x t tω
∂ ∂ ∂+ = +
∂ ∂ ∂ (A.28)
Substituting Equation (A.26) into (A.28):

Appendix A – Conventions & Elastic beam theory
333
2 2 2
2 2 22 ( , )y bz z
w w wEI m m p x t
x x t tω
∂ ∂ ∂ ∂+ + =
∂ ∂ ∂ ∂ (A.29)
which is the equation of motion of elastic beam in the z-direction.
A.5 Differential equation governing the longitudinal deformation of a beam
In Figure A.11a, an elastic beam is subjected to a longitudinal load ( ), .xp x t The
longitudinal loading causes a cross-section ab to move to a new location a b′ ′ as
shown in Figure 11b. The displacement of a typical point p on the cross section of the
beam is ( ),u x t .
(z-axis out)
u
b'
a'p'p
b
a
y, v
x, u
Figure A.11: (a) Elastic beam subjected to a longitudinal load (b) displacement of a
beam cross-section in the x direction
The linear strain x
ε in the fibres of the beam can be defined as:
(a)
(b)
( ), .xp x t , , E A m
L
, x u
, y v
z dxx

Appendix A – Conventions & Elastic beam theory
334
xx
u
xε
∂=
∂ (A.30)
Substituting Equation (A.30) into (A.10) gives
x
uE
xσ
∂=
∂ (A.31)
Figure A.12 shows that the positive axial force acting on the positive face of the
segment can be related to the normal stress x
σ acting on the cross section as follows:
x
A
P dAσ= ∫ (A.32)
(z-axis out)
P
(a) Stress distribution (b) Beam section
σx
+y
xσ
z
yy
dA
x
Beam centroidal axis
Figure A.12: Stress distribution on an elastic beam segment due to axial force
Substituting Equation (A.31) into (A.32) gives:
A
u uP E dA EA
x x
∂ ∂= =
∂ ∂∫ (A.33)
In Figure A.13, a differential beam segment of length dx is subjected to load ( )xp x
acting in the positive x direction.

Appendix A – Conventions & Elastic beam theory
335
x
P
z
y, v
x, u
P
xdxP +
p (x)
dx
Figure A.13: Beam segment undergoing axial loading
Newton’s second law is applied in the horizontal direction:
( )2
2, 2
x bx
P u uP dx p x t dx P m dx mdx
x t tω
∂ ∂ ∂+ + − − =
∂ ∂ ∂ (A.34)
where bxω is frequency of damping of the beam in the x-direction, (see Appendix D).
Simplifying Equation (A.34) yields:
( )2
2, 2
x bx
P u up x t m m
x t tω
∂ ∂ ∂+ − =
∂ ∂ ∂ (A.35)
Substituting Equation (A.33) into (A.35) and rearranging gives the equation of motion
for axial vibration of an elastic spring:
( )2
22 ,
bx x
u u uEA m m p x t
x x t tω
∂ ∂ ∂ ∂ − + + =
∂ ∂ ∂ ∂ (A.36)
( ),x
p x t
outward

Appendix A – Conventions & Elastic beam theory
336
A.6 Differential equation governing the torsional deformation of a beam
In this section, the equation of motion for an elastic beam subjected to torque is
derived. It is assumes that every cross section remains plane and perpendicular to the
longitudinal axis. In Figure A.14, the torsional loading causes the cross-section to
rotate about the longitudinal axis. A typical point p moves to its new location .p′ The
rotation of the cross-section is x
θ .
p'x, u
y, v
a
b
p
(z-axis out)
w
v
p'
p
(x-axis out)z
O
Figure A.14: Displacement due to applied torque of a beam cross-section (a) in the
xy plane (b) in the yz plane
Examining the displacement of a typical point p to p′ , assuming the displacement and
rotational angle is small, one gets (ignoring warping):
( ) ( ), , , , sin ,x xv x y z t r z x tθ α θ= − = − (A.37a)
( ) ( ), , , cos ,x xw x y z t r y x tθ α θ= = (A.37b)
where r is the distance between the beam’s longitudinal axis and the point p. The
shear strains in the fibres of the beam can then be defined as:
α
(a)
(b)
xθ
α
r

Appendix A – Conventions & Elastic beam theory
337
1
2xy
v u
x yε
∂ ∂= +
∂ ∂ (A.38a)
1
2xz
w u
x zε
∂ ∂ = +
∂ ∂ (A.38a)
Substituting Equation (A.37) into (A.38) gives:
2
xxy
z
x
θε
∂ = −
∂ (A.39a)
2
xxz
y
x
θε
∂ =
∂ (A.39a)
For a linear-elastic infinitesimal body, Hooke’s Law for shear states that:
2xy xy
Gτ ε= (A.40a)
2xz xz
Gτ ε= (A.40a)
where G is the shear modulus of elasticity. Substituting Equation (A.40) into (A.39)
gives the following expression:
xxy
Gzx
θτ
∂= −
∂ (A.41a)
xxz
Gyx
θτ
∂=
∂ (A.41a)
Examining the shear stress distribution of the cross-section of body in Figure A.15,
one finds that positive moment about the centroidal longitudinal axis i.e. torque, is as
follows:

Appendix A – Conventions & Elastic beam theory
338
( )xz xy
A
T y z dAτ τ= −∫ (A.42)
Substituting Equation (A.41) into (A.42) gives
( )2 2x
A
T G y z dAx
θ∂= +
∂ ∫ (A.43)
+z
+y dA
T
r
τxz
xyτ
zdA
z
(b) Cross-section(a) Shear stress distribution
Figure A.15: Shear stress distribution on the cross-section of an elastic body
The integral in Equation (A.43) is defined as:
( )2 2 2
p
A A
y z dA r dA I+ = =∫ ∫ (A.44)
where p
I is the polar moment of inertia of the cross-section of the elastic body.
Substituting Equation (A.44) into (A.43) gives the relationship between the torque
and angle of twist of the body as:
xp
T GIx
θ∂=
∂ (A.45)

Appendix A – Conventions & Elastic beam theory
339
The inertia of a parallelepiped of a beam undergoing a positive rotation about the
centroidal longitudinal axis as shown in Figure A.16 is as follows:
( )2
2
m vdydz dx
A t
∂
∂ (in the y-direction) (A.46a)
( )2
2
m wdydz dx
A t
∂
∂ (in the z-direction) (A.46b)
where m is the mass per unit length of the beam.
Figure A.16: Segment of a beam subjected to a torque ( ),xm x t
The acceleration terms with the aid of Equation (A.37) are:
22
2 2
xvz
t t
θ∂∂= −
∂ ∂ (A.47a)
22
2 2
xwy
t t
θ∂∂=
∂ ∂ (A.47a)
TT dx
x
∂+
∂
( ),x
m x t
outward
dx
,x u
,y v
,z w
T

Appendix A – Conventions & Elastic beam theory
340
Equation (A.46a) is multiplied by z− and Equation (A.46b) by y+ , which gives:
( )2
2
m vz dydz
A t
∂−
∂ (A.48a)
and
( )2
2
m wy dydz
A t
∂
∂ (A.48b)
Substituting Equations (A.47) into Equation (A.48) and then adding Equations
(A.48a) to (A.48b) and integrating over the cross-section gives the rotational inertia
about the longitudinal axis as:
( )2 2
2 2
2 2
x x
p
A
m my z dA I
A t A t
θ θ∂ ∂+ =
∂ ∂∫ (A.49)
Newton’s second law tell us that the rotational inertia about the longitudinal axis of
the beam segment of Figure A.16 is equal to the sum of the moments about the x-axis:
( ) ( )2
2, 2 ,
p x x x
x p brx x
mI Tm x t GI m m x t
A t x x x t
θ θ θω
∂ ∂ ∂∂ ∂ = + = + +
∂ ∂ ∂ ∂ ∂
or
( )2
22 ,
px x x
p brx x
mIGI m m x t
x x A t t
θ θ θω
∂ ∂ ∂∂ − + + =
∂ ∂ ∂ ∂ (A.50)
where ( ),xm x t is the torque moment about the x-axis and brx
ω is the frequency of
damping of the beam about the x-axis.

Appendix B – FEM applied to equations of motion of a beam
341
Appendix B
FEM applied to equations of motion of a beam
B.1 Introduction
In this appendix, the finite element method is applied to the differential equations
governing the motion for the beam. The Galerkin weighted residual method is used.
B.2 Beam Element in the x-y plane
In Figure B.1, a beam finite element of length l is subjected to a uniformly distributed
load, ( ),yp x t acting in the positive y direction. The nodal displacements, forces and
moments have the following convention: the nodal shear forces, 1ˆ
yQ and 2ˆ
yQ , and
nodal displacements 1v and 2v are positive in the positive y-direction and the nodal
bending moments , 1ˆ
zM and 2
ˆz
M , and the nodal rotations, 1ˆz
θ and 2ˆz
θ , are positive in
the positive direction of the z-axis. The integer subscripts denote the local node of the
element.

Appendix B – FEM applied to equations of motion of a beam
342
l
21 x
z
Figure B.1: Beam element subjected to a uniformly distributed load in x-y plane.
Figure B.2 presents the sign convention for internal forces, i.e. positive axial force,
positive shear force and positive bending moment used in the elastic beam theory in
Appendix A. Comparing Figure B.1 with B.2, it is found that:
( ) ( )1 2ˆ ˆ0 ; y y y yQ Q Q Q l= − = + (B.1a)
( ) ( )1 2ˆ ˆ0 ; z z z zM M M M l= − = + (B.1b)
y y
z zP P
Q
M
Q
M
Figure B.2: Sign convection for positive internal forces and bending moments
The beam element in the x-y plane, has four degrees of freedom; therefore, a cubic
displacement function ( ),v x t with four coefficients ( )1, 4ia i = is used:
2 3
1 2 3 4v a a x a x a x= + + + (B.2)
z
x
y, v
0
1 1ˆˆ ,z zM θ 2 2
ˆˆ ,z zM θ
1 1ˆ ,yQ v
2 2ˆ ,yQ v
, zEI m
( ),yp x t

Appendix B – FEM applied to equations of motion of a beam
343
Using Equation (A.2), the slope at each node is defined as:
2
2 3 42 3z
dva a x a x
dxθ = = + + (B.3)
The coefficients ( )1, 4ia i = used are evaluated from the nodal value of displacement
and its first derivate, which are evident from inspection of Figure A.5 and Figure B.1 as:
1 1ˆ and
z z
dvv v
dxθ θ= = = at x = 0 (B.4a)
2 2ˆ and
z z
dvv v
dxθ θ= = = at x = l (B.4b)
Substituting Equation (B.4) into Equation (B.2) and (B.3), one obtains in matrix form:
1 1
1 2
2 3
2 3
2
42
1 0 0 0
ˆ 0 1 0 0
1
ˆ 0 1 2 3
z
z
v a
a
v al l l
al l
θ
θ
=
(B.5)
Inverting Equation (B.5) gives
11
2 1
2 23 2
4 23 2 3 2
1 0 0 0
0 1 0 0ˆ
3 2 3 1
ˆ2 1 2 1
z
z
va
a
a vl l l l
a
l l l l
θ
θ
= − − − −
(B.6)
Substituting Equation (B.6) into (B.2) and gathering terms yields
2 3 2 3 2 3 2 3
1 1 2 22 3 2 2 3 2
3 2 2 3 2ˆ ˆ1z z
x x x x x x x xv v x v
l l l l l l l lθ θ
= − + + − + + − + − +

Appendix B – FEM applied to equations of motion of a beam
344
( ) ( ) ( ) ( )1 1 1 1 2 2 2 2ˆ ˆz zN x v G x N x v G xθ θ= + + + (B.7)
where ( )1N x , ( )1G x , ( )2N x and ( )2G x are known as shape functions and are
defined as:
( )2 3
1 2 3
3 21
x xN x
l l= − + , ( )
2
1 2 3
6 6x xN x
l l′ = − + , ( )1 2 3
6 12xN x
l l′′ = − + , ( )1 3
12N x
l′′′ =
( )2 3
1 2
2x xG x x
l l= − + , ( )
2
1 2
4 31
x xG x
l l′ = − + ( )1 2
4 6xG x
l l′′ = − + , ( )1 2
6G x
l′′′ =
( )2 3
2 2 3
3 2x xN x
l l= − , ( )
2
2 2 3
6 6x xN x
l l′ = − , ( )2 2 3
6 12xN x
l l′′ = − , ( )2 3
12N x
l′′′ = −
( )2 3
2 2
x xG x
l l= − + , ( )
2
2 2
2 3x xG x
l l′ = − + , ( )2 2
2 6xG x
l l′′ = − + , ( )2 2
6G x
l′′′ = (B.8)
Each dash over the shape functions ( )1N x ( )1G x , ( )2N x and ( )2G x represents a
derivative with respect to x. A plot of the beam element shape functions can also be
seen in Figure B.3.
l
x
1
0
l
x
1
0
1
x
l0
1
x
l
0
Figure B.3: Beam element shape functions
N1
G1
N2
G2
45o
45otan 45 1o =

Appendix B – FEM applied to equations of motion of a beam
345
Recalling Equation (A.22) with z
EI constant and omitting the damping term, the
differential equation of motion for an elastic beam is given as:
( )4 2
4 2,
z y
v vEI m p x t
x t
∂ ∂+ =
∂ ∂ (B.9)
where E is Young’s modulus of elasticity, Iz is the moment of inertia and m is the
mass per unit length. It should be noted that m Aρ= , whereby A is the cross-sectional
area of the beam and ρ is density of the beam material.
In order to apply the method of weighted residuals, one multiplies both sides of
Equation (B.9) by a weighting function vδ and integrates along the element length:
( )4 2
4 2
0
, 0
l
z y
v vEI m p x t vdx
x tδ
∂ ∂+ − =
∂ ∂ ∫ (B.10)
The term 4
4
0
l
z
vEI v dx
xδ
∂
∂∫ in Equation (B.10) is now integrated by parts twice using the
following general expression:
0
0 0
l ll
udv uv vdu= −∫ ∫ (B.11)
resulting in the following:
4 3 3
4 3 3
0 00
ll l
z z z
v v v vEI v dx vEI EI dx
x x x x
δδ δ
∂ ∂ ∂ ∂= −
∂ ∂ ∂ ∂∫ ∫
3 2 2 2
3 2 2 2
00 0
l l l
z z z
v v v v vvEI EI EI dx
x x x x x
δ δδ
∂ ∂ ∂ ∂ ∂= − +
∂ ∂ ∂ ∂ ∂∫

Appendix B – FEM applied to equations of motion of a beam
346
3 3 2 2 2 2
3 3 2 2 2 2
000
l
z z z z z
l l
v v v v v v v vvEI vEI EI EI EI dx
x x x x x x x x
δ δ δδ δ
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= − − + +
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∫
2 2
2 20 0 0
l
y y z z zll
v v v vvQ vQ M M EI dx
x x x x
δ δ δδ δ
∂ ∂ ∂ ∂= − + − + +
∂ ∂ ∂ ∂∫
2 2
2 1 2 1 2 200 0
ˆ ˆ ˆ ˆl
y y z z zll
v v v vv Q v Q M M EI dx
x x x x
δ δ δδ δ
∂ ∂ ∂ ∂= − − − − +
∂ ∂ ∂ ∂∫ (B.12)
where the shear force y
Q and the bending moment z
M are defined by Equations
(A.19) and (A.16), respectively. Substituting Equation (B.12) into (B.10) and
rearranging gives:
2 2 2
2 2 2
0
l
z
v v vEI m v dx
x x t
δδ
∂ ∂ ∂+
∂ ∂ ∂ ∫
( ) 1 1 2 2000
ˆ ˆˆ ˆ,
l
y y z y zll
v vp x t vdx v Q M v Q M
x x
δ δδ δ δ
∂ ∂= + + + +
∂ ∂∫ (B.13)
We now apply Galerkin’s method of weighted residuals, where the four shape
functions are used as weighting functions. The result is the following four equations:
( ) ( ) ( ) ( ) ( )2 2
1 1 1 1 1 1 1 1 2 1 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
z y y z y z
v vEI N mN dx p x t N dx N Q N M N l Q N l M
x t
∂ ∂′′ ′ ′+ = + + + + ∂ ∂
∫ ∫ (B.14a)
( ) ( ) ( ) ( ) ( )2 2
1 1 1 1 1 1 1 1 2 1 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
z y y z y z
v vEI G mG dx p x t Gdx G Q G M G l Q G l M
x t
∂ ∂′′ ′ ′+ = + + + + ∂ ∂
∫ ∫ (B.14b)
( ) ( ) ( ) ( ) ( )2 2
2 2 2 2 1 2 1 2 2 2 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
z y y z y z
v vEI N mN dx p x t N dx N Q N M N l Q N l M
x t
∂ ∂′′ ′ ′+ = + + + + ∂ ∂
∫ ∫ (B.14c)
( ) ( ) ( ) ( ) ( )2 2
2 2 2 2 1 2 1 2 2 2 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
z y y z y z
v vEI G mG dx p x t G dx G Q G M G l Q G l M
x t
∂ ∂′′ ′ ′+ = + + + + ∂ ∂
∫ ∫ (B.14d)
where each dash on the displacement function indicates a derivative with respect to x.

Appendix B – FEM applied to equations of motion of a beam
347
Rewriting Equation (B.14) in matrix form gives:
1 1
2 21 1
2 2
2 20
2 2
l
z
N N
G Gv vEI m dx
N Nx t
G G
′′ ′′ ∂ ∂ + ′′ ∂ ∂ ′′
∫
( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
1 1 1 11
1 1 1 11
1 1 2 2
2 2 2 220
2 2 2 22
0 0
0 0ˆ ˆˆ ˆ,
0 0
0 0
l
y y z y z
N N N l N lN
G G G l G lGp x t dx Q M Q M
N N N l N lN
G G G l G lG
′ ′ ′ ′
= + + + + ′ ′
′ ′
∫ (B.15)
Next one substitutes Equation (B.7) in (B.15) giving:
[ ] [ ]
111 1
1 1 1 1
1 1 2 2 1 1 2 2
2 2 2 20 0
2 22 2
ˆ ˆ
ˆ ˆ
l l
z z
z
z z
vvN N
G GEI N G N G dx m N G N G dx
N v N v
G G
θ θ
θ θ
′′ ′′
′′ ′′ ′′ ′′ + ′′
′′
∫ ∫
&&
&&
&&
&&
( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
1 1 1 11
1 1 1 11
1 1 2 2
2 2 2 220
2 2 2 22
0 0
0 0ˆ ˆˆ ˆ,
0 0
0 0
l
y y z y z
N N N l N lN
G G G l G lGp x t dx Q M Q M
N N N l N lN
G G G l G lG
′ ′ ′ ′
= + + + + ′ ′
′ ′
∫ (B.16)
where each dot over a nodal displacement indicates a derivative with respect to t. The
shape functions and their derivatives are evaluated at 0x = and x l= using Equation
(B.8). Substituting the results into the right hand side of Equation (B.16) leads to the
following:
[ ] [ ]
111 1
1 1 1 1
1 1 2 2 1 1 2 2
2 2 2 20 0
2 22 2
ˆ ˆ
ˆ ˆ
l l
z z
z
z z
vvN N
G GEI N G N G dx m N G N G dx
N v N v
G G
θ θ
θ θ
′′ ′′
′′ ′′ ′′ ′′ + ′′
′′
∫ ∫
&&
&&
&&
&&

Appendix B – FEM applied to equations of motion of a beam
348
( )
1
1
1 1 2 2
20
2
1 0 0 0
0 1 0 0ˆ ˆˆ ˆ,0 0 1 0
0 0 0 1
l
y y z y z
N
Gp x t dx Q M Q M
N
G
= + + + +
∫ (B.17)
Multiplying the column vector and the row vector of shape functions in Equation
(B.17) gives:
11 1 1 1 1 2 1 2 1 1 1 1 1 2 1 2
1 1 1 1 1 2 1 2 1 1
2 1 2 1 2 2 2 2 20 0
2 1 2 1 2 2 2 2 2
ˆ
ˆ
y
l l
z
z
y
z
vN N N G N N N G N N N G N N N G
G N GG G N G G G NEI dx m
N N N G N N N G v
G N G G G N G G
θ
θ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ +
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′
∫ ∫
1
1 1 1 1 2 1 2 1
2 1 2 1 2 2 2 2 2
2 1 2 1 2 2 2 22
ˆ
ˆ
y
z
y
z
v
GG G N G Gdx
N N N G N N N G v
G N G G G N G G
θ
θ
&&
&&
&&
&&
( )
11
1 1
20 2
22
ˆ
ˆ,
ˆ
ˆ
y
l
z
y
y
z
QN
G Mp x t dx
N Q
G M
= +
∫ (B.18)
Carrying out the integration on the left hand side of Equation (B.18) gives the
following matrix equation governing transverse motion of the beam element in the x-y
plane as:
11
2 2 2 2
1 1
3
2 2
2 2 2 2
2 2
12 6 12 6 156 22 54 13
ˆ ˆ6 4 6 2 22 4 13 3
12 6 12 6 54 13 156 22420
ˆ6 2 6 4 13 3 22 4 ˆ
z zz
z z
vvl l l l
l l l l l l l lEI ml
v vl l l ll
l l l l l l l l
θ θ
θ θ
− − − − + − − − − − − − −
&&
&&
&&
&&
( )
11
1 1
20 2
22
ˆ
ˆ,
ˆ
ˆ
y
l
z
y
y
z
QN
G Mp x t dx
N Q
G M
= +
∫ (B.19)

Appendix B – FEM applied to equations of motion of a beam
349
The first term on the right-hand side of Equation (B.19) can be written as:
( ) ( )
2 3
2 3
2 31
2 31
2 320 0
2 3
2
2 3
2 3
3 21
2
, ,3 2
l l
y y
x x
l lN x x
xG l l
p x t dx p x t dxN x x
G l l
x x
l l
− +
− + =
−
− +
∫ ∫ (B.20)
Equation (B.20) is evaluated easily when ( ) ( ),y yp x t p t= i.e. independent of x:
( ) ( ) ( )
3 4
2 3
0
2 3 4
1
2 3 2
01
3 420
22 3
20
3 4
2 3
0
2
2 0.5000
2 3 4 0.0833,
0.5000
0.08332
3 4
l
l
l
y y yl
l
x xx
l l
x x xN l
l lG lp x t dx p t p t
N lx xG ll l
x x
l l
− +
− +
= =
− −
− +
∫ (B.21)

Appendix B – FEM applied to equations of motion of a beam
350
B.3 Beam Element in the x-z plane
A beam finite element of length l is subjected to a uniformly distributed load, ( ),zp x t
acting in the positive z direction as illustrated in Figure B.4. The coordinate system,
defined by (x, z) for the beam element, is such that the nodal shear forces, 1ˆ
zQ and
2ˆ
zQ , nodal displacement 1w and 2w are positive in the positive z-direction and the
nodal bending moment, 1ˆ
yM and 2ˆ
yM , and the nodal rotation, 1ˆ
yθ and 2ˆ
yθ , are
positive in the positive direction of the y-axis.
l
y
x1 2
Figure B.4: Beam element subjected to a uniformly distributed load in x-z plane.
The sign convention for positive axial force, shear force and bending moment
described in Section A.2.3 can be seen in Figure B.5.
z z
y y
P PQ
M
Q
M
Figure B.5: Sign convection for positive internal forces and bending moments
1 1ˆˆ ,y yM θ
2 2ˆˆ ,y yM θ
1 1ˆ ,zQ w 2 2
ˆ ,zQ w
, yEI m
( ),zp x t
y
x
z, w
0

Appendix B – FEM applied to equations of motion of a beam
351
Comparing Figure B.4 with B.5, it can be seen that:
( ) ( )1 2ˆ ˆ0 ; z z z zQ Q Q Q l= − = + (B.22a)
( ) ( )1 2ˆ ˆ0 ; y y y yM M M M l= − = + (B.22b)
The beam element in the x-z plane, also has four degrees of freedom; therefore, a
cubic displacement function with four coefficients is used ( )5,8ia i = , as follows:
2 3
5 6 7 8w a a x a x a x= + + + (B.23)
Using Equation (A.5), the slope at each node is defined as:
2
6 7 82 3y
dwa a x a x
dxθ− = = + + (B.24)
The coefficients ( )5,8ia i = used are evaluated from the nodal values of displacement
and its first derivates, which is evident from an inspection of Figure A.6 and Figure
B.4 as:
1 1ˆ and
y y
dww w
dxθ θ= − = = − at x = 0 (B.25a)
2 2ˆ and
y y
dww w
dxθ θ= − = = − at x = l (B.25b)
Substituting Equation (B.25) into Equation (B.23) and (B.24), one obtains in matrix
form:

Appendix B – FEM applied to equations of motion of a beam
352
15
1 6
2 32 7
2
82
1 0 0 0
ˆ 0 1 0 0
1
ˆ 0 1 2 3
y
y
w a
a
w al l l
al l
θ
θ
− =
− − −
(B.26)
Inverting Equation (B.26) gives
15
16
2 227
8 23 2 3 2
1 0 0 0
0 1 0 0ˆ
3 2 3 1
ˆ2 1 2 1
y
y
wa
a
wa l l l l
a
l l l l
θ
θ
−
= − − − −
(B.27)
Substituting Equation (B.27) into (B.23) and gathering terms yields
2 3 2 3 2 3 2 3
1 1 2 22 3 2 2 3 2
3 2 2 3 2ˆ ˆ1 y y
x x x x x x x xw w x w
l l l l l l l lθ θ
= − + + − + − + − + −
or
( ) ( ) ( ) ( )1 1 1 1 2 2 2 2ˆ ˆ
y yw N x w G x N x w G xθ θ= − + − (B.28)
where ( )1N x , ( )1G x , ( )2N x and ( )2G x are the shape functions and are defined in
Equation (B.8). Recalling Equation (A.29) with y
EI constant and omitting the
damping term, the differential equation of motion for an elastic beam is given as:
( )4 2
4 2,
y z
w wEI m p x t
x t
∂ ∂+ =
∂ ∂ (B.29)

Appendix B – FEM applied to equations of motion of a beam
353
where E is Young’s modulus of elasticity, Iy is the moment of inertia and m is the
mass per unit length.
In order to apply the method of weighted residuals, one multiplies both sides of
Equation (B.29) by a weighting function wδ and integrates along the element length:
( )4 2
4 2
0
, 0
l
y z
w wEI m p x t wdx
x tδ
∂ ∂+ − =
∂ ∂ ∫ (B.30)
The term 4
4
0
l
y
wEI w dx
xδ
∂
∂∫ in Equation (B.30) is now integrated by parts twice using
Equation (B.11), resulting in the following:
4 3 3
4 3 3
0 00
ll l
y y y
w w w wEI w dx wEI EI dx
x x x x
δδ δ
∂ ∂ ∂ ∂= −
∂ ∂ ∂ ∂∫ ∫
3 2 2 2
3 2 2 2
00 0
l l l
y y y
w w w w wwEI EI EI dx
x x x x x
δ δδ
∂ ∂ ∂ ∂ ∂= − +
∂ ∂ ∂ ∂ ∂∫
3 3 2 2 2 2
3 3 2 2 2 2
000
l
y y y y y
l l
w w w w w w w wwEI wEI EI EI EI dx
x x x x x x x x
δ δ δδ δ
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= − − + +
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∫
2 2
2 20
0 0
l
z z y y yll
w w w wwQ wQ M M EI dx
x x x x
δ δ δδ δ
∂ ∂ ∂ ∂= − + + − +
∂ ∂ ∂ ∂∫
2 2
2 1 2 1 2 200 0
ˆ ˆ ˆ ˆl
z z y y yll
w w w ww Q w Q M M EI dx
x x x x
δ δ δδ δ
∂ ∂ ∂ ∂= − − + + +
∂ ∂ ∂ ∂∫ (B.31)
where the shear force z
Q and the bending moment y
M are defined by Equations
(A.26) and (A.23), respectively. Substituting Equation (B.31) into (B.30) and
rearranging gives:

Appendix B – FEM applied to equations of motion of a beam
354
2 2 2
2 2 2
0
l
y
w w wEI m w dx
x x t
δδ
∂ ∂ ∂+
∂ ∂ ∂ ∫
( ) 1 1 2 2000
ˆ ˆˆ ˆ,
l
z z y z yll
w wp x t wdx w Q M w Q M
x x
δ δδ δ δ
∂ ∂= + − + −
∂ ∂∫ (B.32)
We now apply Galerkin’s method of weighted residuals, where the four shape
functions are used as weighting functions. The result is the following four equations:
( ) ( ) ( ) ( ) ( )2 2
1 1 1 1 1 1 1 1 2 1 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
y z z y z y
w wEI N mN dx p x t Ndx N Q N M N l Q N l M
x t
∂ ∂′′ ′ ′+ = + − + − ∂ ∂
∫ ∫ (B.33a)
( ) ( ) ( ) ( ) ( )2 2
1 1 1 1 1 1 1 1 2 1 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
y z z y z y
w wEI G mG dx p x t Gdx G Q G M G l Q G l M
x t
∂ ∂′′ ′ ′− + =− − + − + ∂ ∂
∫ ∫ (B.33b)
( ) ( ) ( ) ( ) ( )2 2
2 2 2 2 1 2 1 2 2 2 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
y z z y z y
w wEI N mN dx p x t N dx N Q N M N l Q N l M
x t
∂ ∂′′ ′ ′+ = + − + −
∂ ∂ ∫ ∫ (B.33c)
( ) ( ) ( ) ( ) ( )2 2
2 2 2 2 1 2 1 2 2 2 22 2
0 0
ˆ ˆˆ ˆ, 0 0
l l
y z z y z y
w wEI G mG dx p x t Gdx G Q G M G l Q G l M
x t
∂ ∂′′ ′ ′− + =− − + − +
∂ ∂ ∫ ∫ (B.33d)
where each dash on the displacement function indicates a derivative with respect to x.
It should be noted that Equation (B.33b) and (B.33d) have both been multiplied by -1,
so that the sign of the weighting function corresponds with the sign of the shape
functions in Equation (B.28). Rewriting Equation (B.33) in matrix form, one gets:
1 1
2 21 1
2 2
2 20
2 2
l
y
N N
G Gw wEI m dx
N Nx t
G G
′′ ′′− −∂ ∂ + ′′ ∂ ∂ ′′− −
∫

Appendix B – FEM applied to equations of motion of a beam
355
( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
1 1 1 11
1 1 1 11
1 1 2 2
2 2 2 220
2 2 2 22
0 0
0 0ˆ ˆˆ ˆ,
0 0
0 0
l
z z y z y
N N N l N lN
G G G l G lGp x t dx Q M Q M
N N N l N lN
G G G l G lG
′ ′ ′ ′− − − −−
= + − + − ′ ′
′ ′− − − −−
∫ (B.34)
Next, one substitutes Equation (B.28) into (B.34) giving:
[ ] [ ]
111 1
1 11 1
1 1 2 2 1 1 2 2
2 22 20 0
2 22 2
ˆ ˆ
ˆ ˆ
l ly y
y
y y
wwN N
G GEI N G N G dx m N G N G dx
w wN N
G G
θ θ
θ θ
′′ ′′ − − ′′ ′′ ′′ ′′− − + − −
′′ ′′− −
∫ ∫
&&
&&
&&
&&
( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
1 1 1 11
1 1 1 11
1 1 2 2
2 2 2 220
2 2 2 22
0 0
0 0ˆ ˆˆ ˆ,
0 0
0 0
l
z z y z y
N N N l N lN
G G G l G lGp x t dx Q M Q M
N N N l N lN
G G G l G lG
′ ′ ′ ′− − − −−
= + − + − ′ ′
′ ′− − − −−
∫ (B.35)
where each dot over a nodal displacement indicates a derivative with respect to t. The
shape functions and their derivatives are evaluated at x = 0 and x = l using Equation
(B.8). Substituting the results into the right hand side of Equation (B.35) leads to the
following:
[ ] [ ]
111 1
1 11 1
1 1 2 2 1 1 2 2
2 22 20 0
2 22 2
ˆ ˆ
ˆ ˆ
l ly y
y
y y
wwN N
G GEI N G N G dx m N G N G dx
w wN N
G G
θ θ
θ θ
′′ ′′ − − ′′ ′′ ′′ ′′− − + − −
′′ ′′− −
∫ ∫
&&
&&
&&
&&
( )
1
1
1 1 2 2
20
2
1 0 0 0
0 1 0 0ˆ ˆˆ ˆ,0 0 1 0
0 0 0 1
l
z z y z y
N
Gp x t dx Q M Q M
N
G
− −
= + − + − − −
∫ (B.36)

Appendix B – FEM applied to equations of motion of a beam
356
Multiplying the column vector and the row vector of shape functions in Equation
(B.36) gives:
11 1 1 1 1 2 1 2
11 1 1 1 1 2 1 2
22 1 2 1 2 2 2 20
2 1 2 1 2 2 2 2 2
ˆ
ˆ
ly
y
y
wN N N G N N N G
G N G G G N G GEI dx
wN N N G N N N G
G N G G G N G G
θ
θ
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′− − ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′− −
′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′ − − ′′ ′′ ′′ ′′ ′′ ′′ ′′ ′′− −
∫
( )
1 11 1 1 1 1 2 1 2 1
1 11 1 1 1 1 2 1 2 1
22 1 2 1 2 2 2 2 20 0 2
2 1 2 1 2 2 2 2 222
ˆ
ˆ ˆ,
ˆ
ˆ ˆ
z
l ly y
z
z
yy
w QN N N G N N N G N
MG N GG G N GG Gm dx p x t dx
wN N N G N N N G N Q
G N G G G N G G G M
θ
θ
− − − − − + = + − − − − −
∫ ∫
&&
&&
&&
&&
(B.37)
Integrating the left hand side of Equation (B.37) gives the following matrix equation
governing transverse motion of the beam in the x-z plane:
11
2 2 2 21 1
32 2
2 2 2 2
2 2
12 6 12 6 156 22 54 13
ˆ ˆ6 4 6 2 22 4 13 3
12 6 12 6 54 13 156 22420
ˆ6 2 6 4 13 3 22 4 ˆ
y yy
y y
wwl l l l
EI l l l l l l l lml
w wl l l ll
l l l l l l l l
θ θ
θ θ
− − − − − − − − + − − − −
&&
&&
&&
&&
( )
11
11
20 2
22
ˆ
ˆ,
ˆ
ˆ
z
ly
z
z
y
QN
MGp x t dx
N Q
G M
− = +
−
∫ (B.38)
The first term on the right-hand side of Equation (B.38) can be written as:

Appendix B – FEM applied to equations of motion of a beam
357
( ) ( )
2 3
2 3
2 3
1
2 3
1
2 320 0
2 3
2
2 3
2 3
3 21
2
, ,3 2
l l
z z
x x
l l
N x xx
l lGp x t dx p x t dx
N x x
G l l
x x
l l
− +
− − + − =
− −
− − +
∫ ∫ (B.39)
Evaluating Equation (B.39) when ( ) ( ),z zp x t p t= , i.e. independent of x gives the
following:
( ) ( )
3 4
2 3
0
2 3 4
1
2 3 2
01
3 420
22 3
20
3 4
2 3
0
2
2 0.5000
2 3 4 0.0833,
0.5000
0.08332
3 4
l
l
l
z z zl
l
x xx
l l
x x xN l
l lG lp x t dx p t p
N lx xG ll l
x x
l l
− +
− − + − − = =
− −
− − +
∫ ( )t (B.40)
B.4 Beam Element along x-axis
Next one considers the simpler truss or axial element. The element consists of two
pin-connected nodes that can only experience axial deformation. The element is
assumed to behave in a linear-elastic manner. In Figure B.6, the truss element is
subjected to an axial force ( ),x
p x t along the x-axis of the element. The coordinate
system, defined by (x, y) for the axial element, is such that the nodal axial forces, 1P
and 2P , and nodal displacements 1u and 2u are in the positive x-direction.

Appendix B – FEM applied to equations of motion of a beam
358
E, A, m
l
z
x, up(x)
y, v
Figure B.6: Axial element subjected to an axial force p(x,t) along its length
Comparing Figure B.6 with Figure A.13, it is seen that:
( ) ( )1 2ˆ ˆ0 ; P P P P l= − = + (B.41)
Since the axial element has only two degrees of freedom, a linear displacement
function with two coefficients ( )9,10ia i = is used as follows:
9 10u a a x= + (B.42)
where the coefficients ( )9,10ia i = used are evaluated from the nodal values of the
displacement:
1u u= at x = 0 (B.43a)
2u u= at x = l (B.43b)
Substituting Equation (B.43) into Equation (B.42), one obtains in matrix form:
91
102
1 0
1
au
au l
=
(B.44)
1 1ˆ , P u
2 2ˆ , P u
( ),x
p x t

Appendix B – FEM applied to equations of motion of a beam
359
Inverting Equation (B.44) gives
9 1
10 2
1 0
1 1a u
a ul l
= −
(B.45)
Substituting Equation (B.45) into (B.42) and gathering terms yields
1 21x x
u u ul l
= − +
(B.46a)
or
( ) ( )1 1 2 2u H x u H x u= + (B.46b)
where
( )1 1x
H xl
= − ( )1
1H x
l′ = −
( )2
xH x
l= ( )2
1H x
l′ = (B.47)
A plot of these shape functions of the axial element can be seen in Figure B.7.
l
1
0
x
l
0
1
x
Figure B.7: Plot of the displacement functions for the axial element
H1 H2

Appendix B – FEM applied to equations of motion of a beam
360
Recalling Equation (A.36) with EA constant and omitting the damping term, the
differential equation of motion for an axial element is given as:
( )2 2
2 2,
x
u uEA m p x t
x t
∂ ∂− + =
∂ ∂ (B.48)
where E is Young’s modulus of elasticity, A is the cross-sectional area of the beam
and m is the mass per unit length.
In order to apply the method of weighted residuals, one multiplies both sides of
Equation (B.48) by a weighting function uδ and integrates along the element length:
( )2 2
2 2
0
, 0
l
x
u uEA m p x t udx
x tδ
∂ ∂− + − =
∂ ∂ ∫ (B.49)
The term 2
2
0
lu
EA u dxx
δ∂
∂∫ in Equation (B.49) is now integrated by parts using Equation
(B.11) resulting in the following:
2
2
00 0
ll lu u u u
EA u dx uEA EA dxx x x x
δδ δ
∂ ∂ ∂ ∂= −
∂ ∂ ∂ ∂∫ ∫
00
l
l
u uuP uP EA dx
x x
δδ δ
∂ ∂= − −
∂ ∂∫
2 10
0
ˆ ˆl
l
u uu P u P EA dx
x x
δδ δ
∂ ∂= + −
∂ ∂∫ (B.50)
where the axial force P is defined in Equations (A.33). Substituting Equation (B.50)
into (B.49) and rearranging gives:

Appendix B – FEM applied to equations of motion of a beam
361
( )2
1 22 0
0 0
ˆ ˆ,
l l
x l
u u uEA dx m u dx p x t udx u P u P
x x t
δδ δ δ δ
∂ ∂ ∂+ = + +
∂ ∂ ∂ ∫ ∫ (B.51)
We now apply Galerkin’s method of weighted residuals, where the two shape
functions are used as weighting functions. The result is the following two equations:
( ) ( ) ( )2
1 1 1 1 1 1 22
0 0
ˆ ˆ, 0
l l
x
u uEAH mH dx p x t H dx H P H l P
x t
∂ ∂′ + = + + ∂ ∂
∫ ∫ (B.52a)
( ) ( ) ( )2
2 2 2 2 1 2 22
0 0
ˆ ˆ, 0
l l
x
u uEAH mH dx p x t H dx H P H l P
x t
∂ ∂′ + = + +
∂ ∂ ∫ ∫ (B.52b)
Rewriting Equation (B.52) in matrix form, one gets:
( )( )( )
( )( )
21 11 1 1
1 22
2 22 2 20 01
0ˆ ˆ,
0
l l
x
H H lH H Hu uEA m dx p x t dx P P
H H lH H Hx t
′ ∂ ∂ + = + +
′ ∂ ∂ ∫ ∫ (B.53)
Substituting Equation (B.46b) into (B.53) gives:
[ ] [ ]1 1 1 1
1 2 1 2
2 2 2 20 0
l lH u H uEA H H dx m H H dx
H u H u
′ ′ ′ +
′ ∫ ∫
&&
&&
( )( )( )
( )( )
1 11
1 2
2 220
0ˆ ˆ,
0
l
x
H H lHp x t dx P P
H H lH
= + +
∫ (B.54)
The shape functions are evaluated at x = 0 and x = l using Equation (B.47).
Substituting the results into the right hand side of Equation (B.54) gives the
following:

Appendix B – FEM applied to equations of motion of a beam
362
[ ] [ ]1 1 1 1
1 2 1 2
2 2 2 20 0
l lH u H uEA H H dx m H H dx
H u H u
′ ′ ′ +
′ ∫ ∫
&&
&&
( )1
1 2
20
1 0ˆ ˆ,
0 1
l
x
Hp x t dx P P
H
= + +
∫ (B.55)
Multiplying the column vector and the row vector of shape functions in Equation
(B.55) gives:
1 1 1 2 1 1 1 1 2 1
2 1 2 2 2 2 1 2 2 20 0
l lH H H H u H H H H uEA dx m dx
H H H H u H H H H u
′ ′ ′ ′ + ′ ′ ′ ′
∫ ∫&&
&&
( )1 1
20 2
ˆ,
ˆ
l
x
H Pp x t dx
H P
= +
∫ (B.56)
Integrating the left hand side of Equation (B.56) gives the following matrix equation
governing longitudinal motion of a beam element as:
1 1
2 2
1 1 2 1
1 1 1 26
u uEA ml
u ul
− + −
&&
&&( )1 1
20 2
ˆ,
ˆ
l
x
H Pp x t dx
H P
= + ∫ (B.57)
B.5 Torsion Element along the x-axis
To finish, the author examines the torsion effects on an element. Figure B.8 presents a
torsion element subjected to an applied torque ( ),x
p x t about the x-axis of the
element. The coordinate system, defined by (x, y) for the torsion element, is such that
the nodal torques, 1T and 2T , and nodal rotation 1ˆx
θ and 2ˆx
θ are positive in the
direction of the positive x-axis.

Appendix B – FEM applied to equations of motion of a beam
363
E, A, m
l
z
x, up(x)
y, v
Figure B.8: Torsion element subjected to a torque force along its length
Comparing Figure B.8 with Figure A.3, it is found that:
( ) ( )1 2ˆ ˆ0 ; T T T T l= − = + (B.58)
Since the torsion element has only two degrees of freedom, Equations (B.42) to
(B.47) are once again utilized, i.e. ( ) ( )1 1 2 2x x xH x H xθ θ θ= + .
Recalling Equation (A.48) with G and Ip constants, the differential equation of motion
for a torsion element is given as:
( )2 2
2 2,
px xp x
mIGI m x t
x A t
θ θ∂ ∂− + =
∂ ∂ (B.59)
In order to apply the method of weighted residuals, one multiplies both sides of
Equation (B.59) by a weighting function x
δθ and integrates along the element length:
( )2 2
2 2
0
, 0
l
px xp x x
mIGI m x t dx
x A t
θ θδθ
∂ ∂− + = =
∂ ∂ ∫ (B.60)
1 1ˆˆ , x
T θ2 2ˆ ,
xT θ
( ),x
p x t , , pG I m

Appendix B – FEM applied to equations of motion of a beam
364
The term 2
2
0
l
xp
GI dxx
θ∂
∂∫ in Equation (B.60) is now integrated by parts using Equation
(B.11) resulting in the following:
2
2 12 0
0 0
ˆ ˆl l
x x xp x x pl
GI dx T T GI dxx x x
θ δθ θδθ δθ
∂ ∂ ∂= + −
∂ ∂ ∂∫ ∫ (B.61)
where the torque T is defined in Equations (A.43). Substituting Equation (B.61) into
(B.60) and rearranging gives:
( )2
1 22 0
0 0
ˆ ˆ,
l lpx x x
p x x x x x l
mIGI dx dx m x t dx T T
x x A t
δθ θ θδθ δθ δθ δθ
∂ ∂ ∂+ = + +
∂ ∂ ∂ ∫ ∫ (B.62)
Comparing Equation (B.62) with (B.51), one can see a remarkable similarity between
both equations. The terms EA , m , u and P in Equation (B.51) are replaced by the
terms p
GI , pmI A ,
xθ and T in Equation (B.62), respectively; thus, one can
conclude that:
( )11 1 1 2 1 1 1 2 1 11
22 1 2 2 2 1 2 2 20 0 1 0 2
ˆ,
ˆ
l l lpx x
p x
x x
mIH H H H H H H H H TGI dx dx m x t dx
H H H H H H H H HA T
θ θ
θ θ
′ ′ ′ ′ + = + ′ ′ ′ ′
∫ ∫ ∫&&
&&
(B.63)
Integrating the left hand side of Equation (B.63), one gets the following matrix
equation governing the rotational motion about the longitudinal axis.
1 1
2 2
1 1 2 1
1 1 1 26
p px x
x x
GI mI l
l A
θ θ
θ θ
− + −
&&
&&( )1 1
20 2
ˆ,
ˆ
l
x
H Tm x t dx
H T
= + ∫ (B.64)

Appendix B – FEM applied to equations of motion of a beam
365
B.6 Structural-Beam Element
Combining Equation (B.19), (B.38) (B.57) and (B.64), one can write the stiffness and
mass matrix, as well as the force vector for a three-dimensional structural beam
element in local coordinates. The following matrix equation governing the complete
motion of the beam element, in beam element coordinates, results:
3 2 3 2
3 2 3 2
2
2
3 2
3 2
0 0 0 0 0 0 0 0 0 0
12 6 12 60 0 0 0 0 0 0
12 6 12 60 0 0 0 0 0
0 0 0 0 0 0 0
4 6 20 0 0 0 0
4 6 20 0 0 0
0 0 0 0 0
12 60 0 0
12 60 0
0 0
40
4.
z z z z
y y y y
p p
y y y
z z z
z z
y y
p
y
z
A A
l l
I I I I
l l l l
I I I I
l l l l
GI GI
El El
I I I
l l l
I I I
l l lE
A
l
I I
l l
I I
l l
GI
El
I
l
Isym
l
−
− − − − −
−
−
1
1
1
1
1
1
2
2
2
2
2
2
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
x
y
z
x
y
z
u
v
w
u
v
w
θ
θ
θ
θ
θ
θ

Appendix B – FEM applied to equations of motion of a beam
366
1
2 2
2 2
2
2
140 0 0 0 0 0 70 0 0 0 0 0
156 0 0 0 22 0 54 0 0 0 13
156 0 22 0 0 0 54 0 13 0
140 700 0 0 0 0 0 0
4 0 0 0 13 0 3 0
4 0 13 0 0 0 3
140 0 0 0 0 0420
156 0 0 0 22
156 0 22 0
1400 0
4 0
. 4
p p
p
u
l l
l l
I I
A A
l l l
l l lml
l
l
I
A
l
sym l
− −
− − −
+ −
&&
&1
1
1
1
1
2
2
2
2
2
2
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
x
y
z
x
y
z
v
w
u
v
w
θ
θ
θ
θ
θ
θ
=
&
&&
&&
&&
&&
&&
&&
&&
&&
&&
&&
( )( )( )( )( )( )( )( )( )( )( )( )
1
1
1
1
11
11
11
1 1
02 2
22
21
2
22
22
2
ˆ
, ˆ,
ˆ,
ˆ,
ˆ,
ˆ,
ˆ,
, ˆ
, ˆ
,ˆ
,ˆ
,ˆ
x
y
y
zz
x
yy
lz z
x
yy
zy
x
y
yz
z
PH p x t dx
QN p x t dx
QN p x t dx
TH m x t dx
MG p x t dx
G p x t dx M
H p x t dx P
N p x t dx QN p x t dx
QH m x t dx
TG p x t dx
MG p x t dx
M
− = +
−
∫ ext int
= + =
f f f (B.65)
Equation (B.65) can also be rewritten in finite element form as:
ku + mu = f&& (B.66)
where k and m are the local stiffness and mass matrix of the beam element, while u
and u&& are the local displacement and acceleration vectors, while f is the force vector.

Appendix B – FEM applied to equations of motion of a beam
367
B.7 Transformation from local to global axes
Until now, one has only ever concentrated on the local coordinate system of an
element; however, in order to assemble the mass and stiffness matrix for the entire
structure, we must first define each element in a global coordinate system. The local
right-hand coordinate system of an element is defined by x, y, and z, while the global
right-hand coordinate system for the entire structure is X , Y and Z as shown in
Figure B.9. Additionally, the six unit vectors parallel to the axes are also shown on the
diagram.
Figure B.9: Local and global coordinate system
In Figure B.10, the vector P can be represented in local or global coordinates as
follows:
x x y y z z x x y y z zp p p P P PP e e e E E E= + + = + + (B.67)
where, for example,x
p and x
e are the component and unit vector of P in the x
direction.
xe
ye yE
XxE
zE
ze
Yy
x
z
Z

Appendix B – FEM applied to equations of motion of a beam
368
Taking the dot product of Equation (B.67) with x
e one gets the following:
x x x x y y x z z x x x x y y x z z xp p p P P PP e e e e e e e E e Ε e E e⋅ = ⋅ + ⋅ + ⋅ = ⋅ + ⋅ + ⋅ (B.68)
This can also be written as follows:
x x x x y y x z z xp P P PE e E e E e= ⋅ + ⋅ + ⋅ (B.69a)
Similarly,
y x x y y y y z z yp P P PE e E e E e= ⋅ + ⋅ + ⋅ (B.69b)
z x x z y y z z z zp P P P= ⋅ + ⋅ + ⋅E e E e E e (B.69c)
Figure B.10: Vector P in local or global coordinates
Equation (B.69) can also be written in matrix form as:
xp y
p
yP
Xz
P
zp
Y
Z
x
z
y
xP
xey
e
yE
xE
zE
ze

Appendix B – FEM applied to equations of motion of a beam
369
0
x x x x y x z x x
y y x y y y z y y
z z x z y z z z z
p P P
p P P
p P P
⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅
e E e E e E
e E e E e E R
e E e E e E
(B.70a)
where 0R is known as the rotation matrix and is defined as:
0
x x x y x z
y x y y y z
z x z y z z
⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
e E e E e E
R e E e E e E
e E e E e E
(B.70b)
It should be noted that any quantity defined in terms of axes X , Y and Z can be
redefined in terms of the axes x, y, and z by pre-multiplying by the rotation matrix.
Initially, one takes a beam element whose x-axis lies along the X -direction with its y-
and z-axes lying along the Y and Z axes respectively. Then it moves by a series of
three rotations to come to its final position. The rotations are (1) a rotation α about the
y-axis; (2) a rotation β about the current z-axis; and (3) a rotation γ about the current
x-axis. Figure B.11 shows the rotation α of the member OA to OA′ about the z-axis.
The rotation matrix Rα of the member is obtained from Equation (B.70b) as:
( )
( )
o o
o o o
o o
cos cos90 cos 90
cos90 cos0 cos90
cos 90 cos90 cos
x x x y x z
y x y y y z
z x z y z z
α α α
α α αα
α α α
α α
α α
+ ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ −
e E e E e E
R e E e E e E
e E e E e E
(B.71)

Appendix B – FEM applied to equations of motion of a beam
370
Figure B.11: Rotation α of member OA about y-axis
Equation (B.71) is now solved using the following general expressions:
( )cos cos cos sin sinA B A B A B+ = − (B.72a)
( )cos cos cos sin sinA B A B A B− = + (B.72b)
resulting in the following:
cos 0 sin
0 1 0
sin 0 cos
α
α α
α α
− =
R (B.73)
hence,
x x
y y
z z
p P
p P
p P
R
α
αα
α
=
(B.74)
α
α
xe
α
yeαy
E
xE
zE
ze
α
x
, y Y
X
Z
z

Appendix B – FEM applied to equations of motion of a beam
371
Next, the member is rotated from OA′ to OA′′ by means of the rotation β about the z-
axis as shown in Figure B.12. It should be noted that the finished rotated position of
Figure B.11, now becomes the new datum position at which the new angles will be
measured. The rotation matrix Rβ is obtained from Equation (B.70b) as follows:
( )
( )
o o
o o
o o o
cos cos 90 cos90
cos 90 cos cos90
cos90 cos90 cos0
x x x y x z
y x y y y z
z x z y z z
β α β α β α
β α β α β αβ
β α β α β α
β β
β β
− ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = + ⋅ ⋅ ⋅
e e e e e e
R e e e e e e
e e e e e e
(B.75)
Solving Equation (B.75) using (B.72), one gets
cos sin 0
sin cos 0
0 0 1
β
β β
β β
= −
R (B.76)
Figure B.12: Rotation β of member OA′ about z-axis
β
α
yeα
xE
zE
, z z
e eα β
x
Z
X
Yy
α
β
z
xe
α
xe
β
yE
yeβ

Appendix B – FEM applied to equations of motion of a beam
372
The effects of this second rotation are obtained by pre-multiplying the result of (B.74)
by Rβ, giving:
x x x
y y y
z z z
p p P
p p P
p p P
R R R
β α
β αβ β α
β α
= =
(B.77)
Finally, one rotates the element OA′′ about its own centroidal axis i.e. the x-axis, by
means of the rotation γ as illustrated in Figure B.13. As before, the finished rotated
position of Figure B.12 now becomes the new datum position at which the new angles
will be measured. The rotation matrix Rγ from Equation (B.70b) is given as:
( )
( )
o o o
o o
o o
cos0 cos90 cos90
cos90 cos cos 90
cos90 cos 90 cos
x x x y x z
y x y y y z
z x z y z z
β β β
β β βγ
β β β
γ γ
γ γ
⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = − ⋅ ⋅ ⋅ +
e e e e e e
R e e e e e e
e e e e e e
(B.78)
Figure B.13: Rotation γ of member OA′′ about its centroidal axis (x-axis)
γ
β
α
x
Z
X
Yy
α
β
z
γ
yeα
xE
zE
ze
α
xe
α
yeγyE
yeβ
zeβ
zeγ
xe
βx
eγ

Appendix B – FEM applied to equations of motion of a beam
373
Solving Equation (B.78) using (B.72) gives
1 0 0
0 cos sin
0 sin cos
γ γ γ
γ γ
= −
R (B.79)
The effects of the third rotation are obtained by pre-multiplying the result of (B.77) by
Rγ, which gives:
0
x x x x
y y y y
z z z z
p p P P
p p P P
p p P P
R R R R R
γ β
γ βγ γ β α
γ β
= = =
where 0R is defined as:
0
1 0 0 cos sin 0 cos 0 sin
0 cos sin sin cos 0 0 1 0
0 sin cos 0 0 1 sin 0 cos
β β α α
γ γ β β
γ γ α α
− = − −
R
1 0 0 cos cos sin cos sin
0 cos sin sin cos cos sin sin
0 sin cos sin 0 cos
β α β β α
γ γ β α β β α
γ γ α α
− = − −
cos cos sin cos sin
cos sin cos sin sin cos cos cos sin sin sin cos
sin sin cos cos sin sin cos sin sin sin cos cos
β α β β α
γ β α γ α γ β γ β α γ α
γ β α γ α γ β γ β α γ α
− = − + + + − − +
(B.80)

Appendix B – FEM applied to equations of motion of a beam
374
B.8 Rotating the element equation from local to global coordinates
In this section, the author rotates the element equation from the local to global
coordinate system. Recalling Equation (B.66), the element equation in local
coordinates is defined as follows:
ku + mu = f&& (B.81)
where k and m are the local stiffness and mass matrix of the beam element, while u
and u&& are the nodal displacement and acceleration vectors and f is the force vector.
From Section B.6, it is found that the local displacement is transformed to a global
displacement as follows:
u TU= (B.82)
where the transformation matrix T is defined as:
0
0
0
0
0 0 0
0 0 0
0 0 0
0 0 0
R
RT
R
R
=
(B.83)
where each 0R represents a 3x3 matrix as given in Equation (B.80). Therefore,
Equation (B.81) can be rewritten in global coordinates as:
kTU + mTU = f&& (B.84)

Appendix B – FEM applied to equations of motion of a beam
375
Then, pre-multiplying Equation (B.84) by TT gives:
T T TT kTU + T mTU = T f&& (B.85a)
or
T =KU + MU = T f F&& (B.85b)
where K and M are the stiffness and mass matrix in global coordinates, respectively,
while F is force vector of the structure in global coordinates. Equation (B.85) is the
complete equation of motion of a beam element in the global coordinate system.
Equation (B.85a) can now be expanded using Equation (B.65) giving:
3 2 3 2
3 2 3 2
2
2
3 2
3 2
0 0 0 0 0 0 0 0 0 0
12 6 12 60 0 0 0 0 0 0
12 6 12 60 0 0 0 0 0
0 0 0 0 0 0 0
4 6 20 0 0 0 0
4 6 20 0 0 0
0 0 0 0 0
12 60 0 0
12 60 0
0 0
40
4.
z z z z
y y y y
p p
y y y
z z z
T
z z
y y
p
y
z
A A
l l
I I I I
l l l l
I I I I
l l l l
GI GI
El El
I I I
l l l
I I I
l l lE
A
l
I I
l l
I I
l l
GI
El
I
l
Isym
l
−
− − − − −
−
−
T
1
1
1
1
1
1
2
2
2
2
2
2
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
x
y
z
x
y
z
U
V
W
U
V
W
Θ
Θ Θ
Θ Θ Θ
T

Appendix B – FEM applied to equations of motion of a beam
376
2 2
2 2
2
2
140 0 0 0 0 0 70 0 0 0 0 0
156 0 0 0 22 0 54 0 0 0 13
156 0 22 0 0 0 54 0 13 0
140 700 0 0 0 0 0 0
4 0 0 0 13 0 3 0
4 0 13 0 0 0 3
140 0 0 0 0 0420
156 0 0 0 22
156 0 22 0
1400 0
4 0
. 4
p p
T
p
l l
l l
I I
A A
l l l
l l lml
l
l
I
A
l
sym l
− −
− − −
+ −
T T
&&1
1
1
1
1
1
2
2
2
2
2
2
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
x
y
z
x
y
z
U
V
W
U
V
W
Θ Θ Θ
= Θ Θ Θ
&&
&&
&&
&&
&&
&&
&&
&&
&&
&&
&&
( )( )( )( )( )( )( )( )( )( )( )( )
1
1
1
1
11
11
11
1 1
02 2
22
21
2
22
22
ˆ
, ˆ,
ˆ,
ˆ,
ˆ,
ˆ,
ˆ,
, ˆ
, ˆ,
ˆ,
ˆ,
ˆ
x
y
y
zz
x
yy
lz zT T
x
yy
zy
x
y
yz
z
PH p x t dx
QN p x t dx
QN p x t dx
TH p x t dx
MG p x t dx
G p x t dx M
H p x t dx P
N p x t dx QN p x t dx
QH p x t dx
TG p x t dx
MG p x t dx
M
− = +
−
∫T T ext int
2
= + =
F F F (B.86)
where U, V and W are the global displacements in the X, Y and Z-direction,
respectively, while ˆx
Θ , ˆyΘ and ˆ
zΘ are the global nodal rotations about the X, Y and
Z-axis, respectively. In addition, each dot over a symbol represents a derivative with
respect to time. The internal forces in Equation (B.86) are then eliminated by forcing
the joint into equilibrium during assembly, as shown in the next subsection.

Appendix B – FEM applied to equations of motion of a beam
377
B.9 Equilibrium of the joints - Assembly
The aim of this sub-section is to show that the internal forces between elements cancel
during assembly. Two rules must be satisfied to achieve the assembled global matrix.
Firstly, there must be compatibility of displacement at the element node i.e. all
members meeting at a joint must have the same displacement. Secondly, there must
be force equilibrium i.e. the sum of the internal forces meeting at a joint must balance
the external forces applied to that joint (Fish & Beltschko, 2007). As an example, the
author presents a beam of length L discretized into four beam elements of length l as
can be seen in Figure B.14a. An external force ( ),yp x t is then applied to the 2nd
beam element as shown in Figure B.14b.
1 3 4 52
Figure B.14: (a) Beam of length L discretized into four beam elements; (b) external
force applied to 2nd
element
Ignoring the mass of the beam, the global equation for the entire structure, denoted by
subscript s is constructed, with the aid of Equation (B.85b), as follows:
0s s s
− =K U F (B.87a)
L
l
element 1
( ),yp x t
(a)
(b)
element 2 element 3 element 4
1
2
1
2
1
2
1
2
,X U
,Y V

Appendix B – FEM applied to equations of motion of a beam
378
where
( )
1
Ee
s
e=
=∑K K (B.87b)
and the superscript in brackets in Equation (B.87b) refers to the element number.
Expanding Equation (B.87b) for our particular example give:
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
1 1
11 121 1
1 1 2 2
21 22 11 12 2 2
2 2 3 33 321 22 11 12
3 3 4 44 4
21 22 11 12
4 4 5 521 22
0 0 0
0 0
00 0
0 0
0 0 0
+
− =+
+
K K U F
K K K K U F
U FK K K K
U FK K K K
U FK K
(B.88a)
or
1 111 12
2 221 22 23
3 331 33 34
4 443 44 45
5 554 55
0 0 0
0 0
00 0
0 0
0 0 0
− =
U FK K
U FK K K
U FK K K
U FK K K
U FK K
(B.88b)
As seen in Equation (B.88a), the global stiffness matrix of the entire structure is
formed by the addition of beam elements that share a common joint. The process
known as joint connectivity tells the user which elements share a common joint.
Next author applies equilibrium at the nodes in order to compute the internal forces in
the beam. The joint examined is node number 2. This node is connected to local node
2 of the 1st element and local node 1 of the 2
nd element as shown in Figure B.14a. In
accordance with Newton’s third law, the internal forces applied to the joint must be

Appendix B – FEM applied to equations of motion of a beam
379
equal and opposite to the internal forces applied at the ends of the beam. It is
important that the reader refers to Figures B.1, as this shows the sign convention for
internal forces acting on an element, while the sign conventions for internal forces
acting on a particular face are shown in Figure B.2. A free-body diagram of node 2 is
shown in Figure B.15
Figure B.15: Free-body diagram of node number 2 and its internal forces
Summing the internal and external forces acting on node 2 can be written as follows:
( ) ( ) ( ) ( )10
at element 1 at element 2
0 , 0l
y y yQ l Q N x p x t dx− − =∫
or ( ) ( )2 1 10
ˆ ˆ , 0l
y y yQ Q N x p x t dx− − =∫ (B.89a)
( ) ( ) ( ) ( )10
at element 1 at element 2
0 , 0l
z z yM l M G x p x t dx− − =∫
or ( ) ( )2 1 10
ˆ ˆ , 0l
z z yM M G x p x t dx− − =∫ (B.89b)
From inspection of Equation (B.89), one can see that if there are no external forces
acting on a particular node, then the internal forces between elements must be equal:
2 1ˆ ˆ 0y yQ Q− = then 2 1
ˆ ˆy yQ Q= (B.90a)
2 1ˆ ˆ 0
z zM M− = then 2 1
ˆ ˆz z
M M= (B.90a)
Node 2
2ˆ
zM
1ˆ
zM
2ˆ
yQ1
ˆy
Q
2ˆ
zM1
ˆz
M
1ˆ
yQ 2
ˆy
Q1i = 2i =Elem 1 Elem 22i = 3i =
( ),yp x t
2ˆ
yQ1
ˆyQ
1ˆ
zM2
ˆz
M
2i =

Appendix B – FEM applied to equations of motion of a beam
380
B.10 Applying rotations to axial elements
This section rotates an axial element that is defined in Section B.4 from local to global
coordinates, which is used in the development of the wheel-rail contact elements in
Chapter 4. Additionally, the author omits the mass matrix from the following
equations as this axial element i.e. wheel-rail contact element has a zero mass;
therefore, Equation (B.85) becomes:
T TT kTU = T f (B.91a)
or
KU = F (B.91b)
where K is the global stiffness matrix, U is the global displacement vector, f is the
local force vector and T is the transformation matrix. By selecting the first three terms
on the left-hand side of Equation (B.91a), one can rewrite the global stiffness matrix
of the axial element are follows:
011 120
00
021 220
00
0 0 00 00 0 0
0 0 00 0 0 00 0 0
0 0 00 00 0 0
0 0 00 0 0 00 0 0
T
L L
T
T
T
L L
T
Rk kR
RRT kT =
Rk kR
RR
00 11 0 12
0
00 21 0 22
0
0 0 00 0
0 0 00 0 0 0
0 0 00 0
0 0 00 0 0 0
T T
L L
T T
L L
=
RR k R k
R
RR k R k
R
11 120 11 0 0 12 0
21 220 21 0 0 22 0
0 00 0
0 0 0 00 0 0 0
0 00 0
0 0 0 00 0 0 0
T TL LL L
T TL LL L
= =
K KR k R R k R
K KR k R R k R (B.92)

Appendix B – FEM applied to equations of motion of a beam
381
where 0R is defined in Equation (B.80), Lij
K (i, j =1, 2) denotes the axial element
(3 3× ) stiffness matrix in the global coordinate system and Lijk (i, j =1, 2) denotes the
axial element (3 3× ) stiffness matrix in the local coordinate system, which can be
written from Equation (B.65) as:
11 12 21 22
0 0
0 0 0
0 0 0
L L L L
EA l = − = − = =
k k k k (B.93)
Since it is assumed that the axial element never undergoes a rotation γ about the x-
axis, it is given a value of zero; therefore, Equation (B.80) becomes:
0
cos cos sin cos sin
sin cos cos sin sin
sin 0 cos
R
β α β β α
β α β β α
α α
− = −
(B.94)
Substituting Equation (B.94) into the first quadrant of Equation (B.92) gives:
11 0
1 0 0 C C S C S C C S C S
0 0 0 S C C S S 0 0 0
0 0 0 S 0 C 0 0 0
L
EA EA
l lk R
β α β β α β α β β α
β α β β α
α α
− − = − =
(B.95)
where, for convenience, C cosα α= , S sinα α= , C cosβ β= and S sinβ β= . Now,
combining Equation (B.95) with the transpose of Equation (B.94), one gets:
0 11 0 11
C C S C S C C S C S
S C 0 0 0 0
C S S S C 0 0 0
T
L L
EA
lR k R K
β α β α α β α β β α
β β
β α β α α
− − = = −

Appendix B – FEM applied to equations of motion of a beam
382
2 2 2
2
2 2 2
C C C S C C C S
C S C S C S S
C C S C S S C S
EA
l
β α β β α β α α
β β α β β β α
β α α β β α β α
−
= − − −
(B.96)
For a vertical spring element as shown in Figure B.16a, one assumes that the rotation
β about the z-axis is equal to o90 , while the rotation α about the y-axis is equal to
zero; therefore, Equation (B.96) becomes:
0 11 0 11
0 0 0
0 1 0
0 0 0
T
L L
EA
lR k R K
= =
(B.97)
For a longitudinal spring element presented in Figure B.16b, one assumes that the
rotation β about the z-axis is equal to o0 while the rotation α about the y-axis remains
equal to zero; therefore, Equation (B.96) becomes:
0 11 0 11
1 0 0
0 0 0
0 0 0
T
L L
EA
lR k R K
= =
(B.98)
Finally, for the lateral spring element as can be seen in Figure B.16c, one assumes that
the rotation β about the z-axis is equal to o0 , while the rotation α about the y-axis is
equal to o270 so that the lateral spring is aligned with the positive z-axis; therefore,
Equation (B.96) becomes:
0 11 0 11
0 0 0
0 0 0
0 0 1
T
L L
EA
lR k R K
= =
(B.99)

Appendix B – FEM applied to equations of motion of a beam
383
Figure B.16: Spring element aligned with the global Y, X and Z-axis
(b) X
Y
Z
x
21
y
z
(c) X
Y
Z x
2
1
y
z
(a) X
Y
Z
x
2
1
y
z

Appendix B – FEM applied to equations of motion of a beam
384
B.11 Equation for the axial extension of a spring element
In this section, the author develops an equation for the axial extension of a spring
element, which is used in Chapter 4 to calculate the contact force between the wheel
and the rail. Recalling Equation (A.8), the strain along the element length is equal to:
xx
u
xε
∂=
∂ (B.100a)
or
change in length of the element
original length of the elementxx
l
lε
∆= = (B.100b)
Substituting Equation (B.46a) into (B.100a) then gives:
1 21xx
x xu u
x l x lε
∂ ∂ = − +
∂ ∂
1 2
1 1u u
l l
= − +
(B.101)
Next, substituting Equation (B.100b) into (B.101), one can relate the change in length
of the spring element i.e. the extension as follows:
1 2
1 1lu u
l l l
∆ = − +
1 2 extensionl u u∆ = − + = (B.102)
To transform the local displacements in Equation (B.102) to global displacements, the
author must use Equation (B.82), which is rewritten here as:
u TU= (B.103)

Appendix B – FEM applied to equations of motion of a beam
385
where the transformation matrix T is defined again as:
0
0
0
0
0 0 0
0 0 0
0 0 0
0 0 0
R
RT
R
R
=
(B.104)
In Section B.10, one found that since the spring element is only rotated about two
axes, firstly about the y-axis and secondly about the z-axis, R0 can be rewritten with
the aid of Equation (B.94) as follows:
0
cos cos sin cos sin
sin cos cos sin sin
sin 0 cos
R
β α β β α
β α β β α
α α
− = −
(B.105)
Substituting Equation (B.105) into (B.104) and then into Equation (B.103) gives the
local displacements in the global coordinate system as follows:
0
0
0
0
0 0 0
0 0 0
0 0 0
0 0 0
=
R
Ru U
R
R
(B.106a)
1 1
1 1
1 1
2 2
2 2
2 2
cos cos sin cos sin 0 0 0
sin cos cos sin sin 0 0 0
sin 0 cos 0 0 0
0 0 0 cos cos sin cos sin
0 0 0 sin cos cos sin sin
0 0 0 sin 0 cos
u U
v V
w W
u U
v V
w W
β α β β α
β α β β α
α α
β α β β α
β α β β α
α α
− −
= −
−
(B.106b)

Appendix B – FEM applied to equations of motion of a beam
386
Expanding only the 1st and 4
th row of Equation (B.106b), the displacement of the
spring element in the local x direction can be written as follows:
1
1
1 1
2 2
2
2
cos cos sin cos sin 0 0 0
0 0 0 cos cos sin cos sin
U
V
u W
u U
V
W
β α β β α
β α β β α
−
= −
(B.107a)
or with a change of notation as:
1
1
1 1
2 2
2
2
cos cos sin cos sin 0 0 0
0 0 0 cos cos sin cos sin
Lx
Ly
Lz
Lx
Ly
Lz
U
U
u U
u U
U
U
β α β β α
β α β β α
−
= −
(B.108)
where Lxi
U (i = 1, 2) is the global horizontal displacement, Lyi
U (i = 1, 2) is the
global vertical displacement and Lzi
U (i = 1, 2) is the global lateral displacement of
the spring element. With the aid of Equation (B.102) and (B.108), the extension on
the spring element in the global coordinate system can be written as:
[ ]1
1
1
extension cos cos sin cos sin
Lx
Ly
Lz
U
U
U
β α β β α
= − −
[ ]2
2
2
cos cos sin cos sin
Lx
Ly
Lz
U
U
U
β α β β α
+ −
(B.109)
As a test, let α be equal to 0o and β be equal to 90
o, then Equation (B.109) reduces to:
[ ]1
1
1
extension 0 1 0
Lx
Ly
Lz
U
U
U
= −
[ ]2
2
2
0 1 0
Lx
Ly
Lz
U
U
U
+
(B.110)

Appendix C – Natural Frequencies and Modal Shapes for a beam
387
Appendix C
Natural Frequencies and Modal Shapes for a beam
C.1 Mode shape for any beam
In this Appendix, the author calculates the natural frequencies and modal shapes of
single-span beams as shown in Figure C.1 under different end restraints.
Figure C.1: Single span beam and coordinate system
From Equation (A.22) with z
EI constant and omitting the damping term, the
differential equation governing the free vibration of a beam is expressed as:
4 2
4 20
v vEI m
x t
∂ ∂+ =
∂ ∂ (C.1)
z
x
y, v
0 m, EIz
L

Appendix C – Natural Frequencies and Modal Shapes for a beam
388
where E is Young’s modulus of elasticity, I is the second moment of area and m is the
mass per unit length of the beam. It should also be noted that beam deflection ( ),v x t
is expressed as a function of both time t and position x along the span.
According to Biggs (1964), since the right-hand side of Equation (C.1) is set equal to
zero, one can define the beam deflection of the n-th mode by:
( ) ( ) ( ),n n nv x t f t xφ= (C.2)
where ( )nf t is a time function, ( )n xφ is the characteristic shape. From Equation
(C.2), one can also write the following relationships:
( ) ( )( )
22
2 2
,n nn
d f tv x tx
t dtφ
∂=
∂ and
( )( )
( )4 4
4 4
,n n
n
v x t d xf t
x dx
φ∂=
∂ (C.3)
Substituting Equation (C.3) into (C.1) gives
( )( ) ( )
( )4 2
4 20
n n
n n
d x d f tEIf t m x
dx dt
φφ+ = (C.4a)
or
( )( )
( )( )4 2
4 2
1n n
n n
d x d f tEI
m x dx f t dt
φ
φ= − (C.4b)
From inspection of Equation (C.4b), one can conclude that the left side varies only
with x, while the right side varies only with t; hence, each expression can be set equal
to a constant term, H. We can now rewrite the left-hand side and the right-hand side
of Equation (C.4b) separately as follows:

Appendix C – Natural Frequencies and Modal Shapes for a beam
389
( ) ( )2
20
n n
df t Hf t
dt+ = (C.5a)
( ) ( )4
40
n n
d mHx x
dx EIφ φ− = (C.5b)
If H is zero or negative, the solution, ( )nf t , of Equation (C.5a) is not periodic in time
and so we would not be solving the natural period problem, which is associated with
the modal shape. Therefore H must be positive and the solution to Equation (C.5a) is
as follows:
( ) 1 2sin cosnf t C Ht C H t= + (C.6)
Clearly, H is the frequency, n
ω . We can now rewrite Equation (C.5b) as:
( ) ( )24
40n
n n
mdx x
dx EI
ωφ φ− = (C.7)
Let the solution to Equation (C.7) be
( ) px
n x Ceφ = (C.8)
where C is constant. Substituting Equation (C.8) into (C.7) gives
24 0px pxn
mp Ce Ce
EI
ω− = or
24 0n
mp
EI
ω− = (C.9)

Appendix C – Natural Frequencies and Modal Shapes for a beam
390
Factorizing Equation (C.9), one gets:
( )( )2 2 2 2 0n n
p m EI p m EIω ω− + = (C.10a)
or
( )( )( )( )2 2 2 24 4 4 4 0n n n n
p m EI p m EI p i m EI p i m EIω ω ω ω− + − + = (C.10b)
where the following mathematical expression are used to evaluate the roots
( )( )2 2p a p a p a− = − + (C.11a)
( ) ( )2 2p a p ia p ia+ = + − (C.11b)
1i = − (C.11c)
Equation (C.10b) is substituted into (C.8) and thus gives rise to the following solution
for ( )n xφ
( ) sin cos sinh coshn n n n n n n n n
x a x a x a x a xφ = + + +A B C D (C.12a)
where
24n na m EIω= (C.12b)
, A B, C, D are constant values evaluated by using the boundary conditions of the beam.
Equation (C12a) is valid for any type of end restraint. The 1st, 2
nd and 3
rd derivatives
of Equation (C.12a) are as follows:
[ ]( ) cos sin cosh sinhn n n n n n n n n n
dx a a x a x a x a x
dxφ = − + +A B C D (C.12c)
[ ]2
2
2( ) sin cos sinh cosh
n n n n n n n n n n
dx a a x a x a x a x
dxφ = − − + +A B C D (C.12d)
[ ]3
3
3( ) cos sin cosh sinh
n n n n n n n n n n
dx a a x a x a x a x
dxφ = − + + +A B C D (C.12e)

Appendix C – Natural Frequencies and Modal Shapes for a beam
391
C.2 Cantilever Beam –Natural Frequencies and Mode Shapes
In the following example, the author examines the free vibration of a cantilever beam
that is supported at the origin; hence, the boundary conditions are as follows:
0v
vx
∂= =
∂ at x = 0 (C.13a)
2 3
2 30
v vEI EI
x x
∂ ∂= − =
∂ ∂ at x = L (C.13b)
where v is the deflection of the beam, v x∂ ∂ is the slope as shown in Equation (A.2),
2 2EI v x∂ ∂ is the bending moment as shown in Equation (A.16), and 3 3EI v x− ∂ ∂ is
the shear force as shown in Equation (A.19). The function ( )n
xφ satisfies the same
boundary condition as ( , )v x t . This can be seen by substituting Equation (C.2) into
Equation (C.13). Evaluating ( )n
xφ at x = 0 using Equation (C.12a) and the first
derivative of that equation gives:
( )0 0n n nφ = = +B D n n
= −D B
(0) 0n n n n n
da a
dxφ = = +A C
n n= −C A (C.14)
Substituting Equation (C.14) back into (C.12a) gives the following:
( ) ( )( ) sin sinh cos coshn n n n n n nx a x a x a x a xφ = − + −A B (C.15)
Similarly, one substitutes x = L into the second and third derivative of ( )n
xφ using
Equation (C.12):

Appendix C – Natural Frequencies and Modal Shapes for a beam
392
( ) ( )2
2 2
2( ) sin sinh cos cosh 0
n n n n n n n n n
dL a a L a L a a L a L
dxφ = − − − − =A +B (C.16a)
( ) ( )3
3 3
3( ) cos cosh sin sinh 0
n n n n n n n n n
dL a a L a L a a L a L
dxφ = − − + − =A B (C.16b)
Since ,n nA B cannot both be equal to zero for a non-trivial value of
nφ , then the
determinant of the coefficients must be zero. The result is:
sin sinh cos cosh0
cos cosh sin sinh
n n n n
n n n n
a L a L a L a L
a L a L a L a L
− − − −=
− − − (C.17)
The formula for evaluating the determinants of a 2x2 matrix is:
a bad bc
c d= − (C.18a)
Equation (C.17) therefore becomes:
( )( ) ( )( )sin sinh sin sinh cos cosh cos cosh 0n n n n n n n n
a L a L a L a L a L a L a L a L− − − − − − − − = (C.18b)
which can also be written as follows:
( ) ( )sin sin sinh sinh sin sinhn n n n n na L a L a L a L a L a L− − − −
( ) ( )cos cos cosh cosh cos cosh 0n n n n n na L a L a L a L a L a L+ − − + − − = (C.18c)
Tidying up Equation (C.18c), one gets:
2 2sin sin sinh sin sinh sinhn n n n n n
a L a L a L a L a L a L− + − +
2 2cos cos cosh cos cosh cosh 0n n n n n n
a L a L a L a L a L a L− − − − = (C.18d)

Appendix C – Natural Frequencies and Modal Shapes for a beam
393
Rearranging Equation (C.18d) gives:
( ) ( )2 2 2 22cos cosh sin cos cosh sinh 0n n n n n n
a L a L a L a L a L a L+ + + − = (C.18e)
From trigonometry one has the following:
2 2sin cos 1A A+ = (C.18f)
2 2cosh sinh 1A A− = (C.18g)
Substituting Equation (C.18f) and (C.18g) into Equation (C.18e) gives:
2cos cosh 2 0n n
a L a L + =
which reduces to
cos cosh 1 0n n
a L a L + = (C.18h)
Solving Equation (C.16a) for nA gives:
( ) ( )2 2sin sinh cos cosh 0n n n n n n n na a L a L a a L a L− − − − =A +B (C.19a)
( ) ( )2 2sin sinh cos coshn n n n n n n na a L a L a a L a L− − = − − −A B (C.19b)
( )( )
cos cosh cos cosh
sin sinh sin sinh
n n n nn n n
n n n n
a L a L a L a L
a L a L a L a L
− − += − = −
− − + A B B (C.19c)
Substituting Equation (C.19c) into Equation (C.15) then gives
( ) ( )cos cosh
( ) sin sinh cos coshsin sinh
n n
n n n n n n n
n n
a L a Lx a x a x a x a x
a L a Lφ
+= − − + −
+ B B (C.20)

Appendix C – Natural Frequencies and Modal Shapes for a beam
394
The undetermined amplitude nB is then evaluated by normalizing ( )n xφ as follows:
( )2
0
L
nx dx Lφ =∫ (C.21)
As an exercise, nB is evaluated for the cantilever beam in Section C.6. It should be
noted that Equation (C.21) can have a value of plus or minus nB ; however, in this
thesis one uses the negative value. In addition, the modes are orthogonal:
( ) ( )0
L
n i inx x dx Lφ φ δ=∫ (C.22)
The natural frequencies,n
ω , of the cantilever beam are related to the roots n
a of
Equation (C.18h) through Equation (C.12b). In order to compute the roots n
a of
Equation (C.18h), this equation is rewritten as follows:
cos cosh 1 0n n
β β + = (C.23a)
n na Lβ = (C.23b)
The roots n
β of Equation (C.23a) are got by plotting the following function:
( ) cos cosh 1β β βΨ = + (C.24)
in Figure C.2. The roots occur when Ψ crosses the β-axis. These roots are
approximated by the points where cos β crosses the β-axis as can be seen in Figure
C.2. The roots of cos β are giving by the following equation, as stated in Biggs
(1964):
2 1, 1, 2, 3, ...
2n
nnβ π
− = =
(C.25)

Appendix C – Natural Frequencies and Modal Shapes for a beam
395
-20
-15
-10
-5
0
5
10
0 2 4 6 8 10 12
ββββ
True
Cos
Figure C.2: Comparing the roots of Ψ and cos β graphically
In Table C1, the author presents βn, n = 1, 6 evaluated both exactly and approximately
for the cantilever beam. For n = 1, the approximate value is unsuitable as the error is
over 16%. For n > 1, the approximate roots are suitable because the differences
between the evaluated and approximate roots are less than 0.5%.
Table C1: First 6 roots of a cantilever beam
n Ψ (β) = 0 cos 0β = % Diff
1 1.875190 1.570796 16.23270%
2 4.694091 4.712389 0.38981%
3 7.854757 7.853982 0.00987%
4 10.995541 10.995574 0.00030%
5 14.137168 14.137167 0.00001%
6 17.278760 17.278760 0.00000%
Using Equation (C.20), a plot of the first 6 mode shapes of the cantilever beam can be
seen in Figure C.3. Substituting Equation (C.23b) into (C.12b) and rearranging in
3
2
π 5
2
π 7
2
π
2
π
Ψ (Ψ (Ψ (Ψ (ββββ)))) cos ββββ

Appendix C – Natural Frequencies and Modal Shapes for a beam
396
terms of the natural frequencies n
ω , one gets the following relationship (measured in
rad/sec):
2
2
nn
EI
L m
βω = (C.26)
Using Table C1, one can write the first natural frequency 1ω using Equation (C.26) as
follows:
( )( )2
1 2
1.87519 EI
L m
π πω = (C.27a)
Alternatively, substituting Equation (C.25) into (C.26) gives approximate natural
frequencies for the cantilever beam, which are most suitable when n > 1.
( )2 2
2
1 2n
n EI
L m
πω
−= (C.27b)
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless length
n = 1 n = 2 n = 3 n = 4 n = 5 n = 6
Figure C.3: First 6 mode shapes of the cantilever beam

Appendix C – Natural Frequencies and Modal Shapes for a beam
397
C.3 Fixed-Fixed Beam – Natural Frequencies and Mode Shapes
In this example, the free vibration of a fixed-fixed beam is examined using a similar
methodology to the previous section; thus the boundary conditions are as follows:
0v
vx
∂= =
∂ at x = 0 (C.28a)
0v
vx
∂= =
∂ at x = L (C.28b)
where v is the deflection of the beam, v x∂ ∂ is the slope. The function ( )n
xφ satisfies
the same boundary conditions as ( , )v x t , namely Equation (C.28). Substituting x = 0
into Equation (C.12a) and into the first derivative of that Equation (C.12c), gives
( )0 0n n nφ = = +B D n n
= −D B
(0) 0n n n n n
da a
dxφ = = +A C
n n= −C A (C.29)
Substituting Equation (C.29) back into (C.12a) gives the following:
( ) ( )( ) sin sinh cos coshn n n n n n nx a x a x a x a xφ = − + −A B (C.30)
Equally, one substitutes x = L into Equation (C.30) and into the first derivative of that
equation giving:
( ) ( )( ) sin sinh cos cosh 0n n n n n n nL a L a L a L a Lφ = − + − =A B (C.31a)
( ) ( )( ) cos cosh sin sinh 0n n n n n n n n n
dL a a L a L a a L a L
dxφ = − + − − =A B (C.31b)

Appendix C – Natural Frequencies and Modal Shapes for a beam
398
Since ,n nA B cannot both be equal to zero for a non-trivial value of
nφ , then the
determinant of the coefficients must be zero, resulting in
sin sinh cos cosh0
cos cosh sin sinh
n n n n
n n n n
a L a L a L a L
a L a L a L a L
− −=
− − − (C.32)
which reduces to
cos cosh 1 0n n
a L a L − = (C.33)
Solving Equation (C.31a) for nA , one gets:
( ) ( )sin sinh cos cosh 0n n n n n na L a L a L a L− + − =A B (C.34a)
( ) ( )sin sinh cos coshn n n n n na L a L a L a L− = − −A B (C.34a)
( )( )cos cosh cos cosh
sin sinh sin sinh
n n n nn n n
n n n n
a L a L a L a L
a L a L a L a L
− − += − =
− + A B B (C.34c)
Substituting Equation (C.34c) into Equation (C.30) then gives
( ) ( )cos cosh
( ) sin sinh cos coshsin sinh
n n
n n n n n n n
n n
a L a Lx a x a x a x a x
a L a Lφ
− += − + −
+ B B (C.35)
The undetermined amplitude nB is evaluated by normalizing ( )n xφ from Equation
(C.21); thus nB is given a value of unity. The evaluation of the natural
frequencies,n
ω , of the fixed-fixed beam are related to the roots n
a of Equation (C.33)
through Equation (C.12b); thus one computes the roots n
a of Equation (C.33) as
follows:

Appendix C – Natural Frequencies and Modal Shapes for a beam
399
cos cosh 1 0n n
β β − = (C.36a)
where
n na Lβ = (C.36b)
The roots n
β of Equation (C36a) are got by plotting the following function
( ) cos cosh 1β β βΨ = − (C.37)
in Figure C.4. The roots occur when Ψ crosses the β-axis. These roots are
approximated by the points where cos β crosses the β-axis as can be seen in Figure
C.4. The roots of cos β are giving by the following equation:
2 1, 1, 2, 3, ...
2n
nnβ π
+ = =
(C.38)
-10
-5
0
5
10
0 2 4 6 8 10 12
ββββ
True
Cos
Figure C.4: Comparing the roots of Ψ and cos β graphically
Table C2 shows βn, n = 1, 6 evaluated both exactly and approximately for the fixed-
fixed beam. It can be clearly seen from Table C2 that the approximate roots have a
3
2
π 5
2
π 7
2
π
2
π
Ψ (Ψ (Ψ (Ψ (ββββ))))
cos ββββ

Appendix C – Natural Frequencies and Modal Shapes for a beam
400
striking similarity to the exact roots. A plot of the first 6 mode shapes of the fixed-
fixed beam is presented in Figure C.5.
Table C2: First 6 roots of a fixed-fixed beam
n Eq. (37) Eq. (38) % Diff
1 4.730041 4.712389 0.37319%
2 7.853205 7.853982 0.00989%
3 10.995610 10.995574 0.00032%
4 14.137170 14.137167 0.00002%
5 17.278760 17.278760 0.00000%
6 20.420352 20.420352 0.00000%
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless length
n = 1 n = 2 n = 3 n = 4 n = 5 n = 6
Figure C.5: First 6 mode shapes of the fixed-fixed beam
Substituting Equation (C.38) into (C.26) gives approximate natural frequencies for the
fixed-fixed beam as follows:
( )2 2
2
1 2n
n EI
L m
πω
+= n = 1, 2, 3 … (C.39)

Appendix C – Natural Frequencies and Modal Shapes for a beam
401
C.4 Simply Supported Beam – Natural Frequencies and Mode Shapes
As a final example, the free vibration of a simply supported beam is examined. The
boundary conditions are as follows:
2
20
vv EI
x
∂= =
∂ at x = 0 (C.40a)
2
20
vv EI
x
∂= =
∂ at x = L (C.40b)
where v is the deflection of the beam, 2 2EI v x∂ ∂ is the bending moment. The
function ( )n
xφ satisfies the same boundary conditions as ( , )v x t , namely Equation
(C.40). Substituting Equation (C.12a) into Equation (C.40a) and into (C.40b) gives
( )0 0n n nφ = = +B D n n
= −D B
22 2
2(0) 0
n n n n n
da a
dxφ = = − +B D
n n=D B (C.41)
From Equation (C.41), one can conclude that both nB and
nD must be equal zero;
thus, Equation (C.12a) can be rewritten as follows:
( ) sin sinhn n n n n
x a x a xφ = +A C (C.42)
Substituting x = L into Equation (C.42) and its second derivative, one gets
( ) sin sinh 0n n n n n
L a L a Lφ = + =A C (C.43a)

Appendix C – Natural Frequencies and Modal Shapes for a beam
402
22 2
2( ) sin sinh 0
n n n n n n
dL a a L a L
dxφ = − + =A C (C.43b)
Adding and subtracting Equation (C.43a) to (C.43b) after first cancelling the 2
na term
in Equation (C.43b) gives the following relationship:
2 sin 0n n
a L =A
2 sinh 0n n
a L =C (C.44b)
Since sinhn
a L cannot be equal to zero, then 0n
=C . Furthermore 0n
≠A , otherwise
the beam would experience no vibration; thus the roots are as follows:
sin 0β = (C.45a)
where
, 1, 2, 3, ...n n
a L n nβ π= = = (C.45b)
Since 0n n n
= = =B C D , then with the aid of Equation (C.45b), one can rewrite
Equation (C.12a) as follows, where nA is arbitrary.
( ) sinn n
n xx
L
πφ = A (C.46)
However in order to satisfy Equation (C.21), one must modify Equation (C.46) as
follows (as an exercise nA is evaluated in Section C.6):

Appendix C – Natural Frequencies and Modal Shapes for a beam
403
( ) 2 sinn
n xx
L
πφ = (C.47a)
where
2n
=A (C.47b)
Figure C.6 plots the first 6 mode shapes of the simply supported beam.
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Dimensionless length
n = 1 n = 2 n = 3 n = 4 n = 5 n = 6
Figure C.5: First 6 mode shapes of the simply supported beam
Finally, substituting Equation (C.45b) into (C.26) gives the natural frequencies for the
simply supported beam as follows:
2 2
2n
n EI
L m
πω = (C.48)

Appendix C – Natural Frequencies and Modal Shapes for a beam
404
C.5 Dimensionless speed ratio αααα for a simply supported beam
In this section, the dimensionless speed ratio α is defined. This parameter is used
throughout this thesis as a means of measuring the current operating vehicle speed
against a critical operating speed. The ratio of first natural frequency of the vehicle
1Ω to the first natural frequency of the bridge 1ω is called α and is written as:
1
1
αω
Ω= (C.49)
where
1
c
L
πΩ = (C.50)
The natural frequency of the bridge 1ω in Equation (C.49) is then replaced by 12 fπ ,
where 1f is in cycles per second giving:
1
12 f
απ
Ω= (C.51)
Substituting Equation (C.50) into (C.51) gives the following equation:
1
1 1 12 2 2 cr
c c c
f f L f L c
πα
π π
Ω= = = = (C.52)
where
12crc f L= (C.53)
Equation (C.53) relates the current operating speed c of the vehicle against its critical
operating speed crc traversing a simply supported beam.

Appendix C – Natural Frequencies and Modal Shapes for a beam
405
C.6 Undetermined amplitude evaluated by normalization
As stated in previous sub-sections, the undetermined amplitude is evaluated by
normalizing the displacement function ( )n xφ as follows:
( )2
0
L
nx dx Lφ = ∫ (C.54)
One first begins with a simple model i.e. the normalization of the simply supported
beam. Recalling Equation (C.46) as follows:
( ) sinn n
n xx
L
πφ = A (C.55)
Squaring Equation (C.55) then gives:
[ ]2
2 2 2( ) sin sinn n n
n x n xx
L L
π πφ
= = A A (C.56)
Integrating Equation (C.56), with limits from 0 to L, one gets:
[ ]2 2 2
0 0
( ) sin
L L
n n
n xx dx dx
L
πφ
=
∫ ∫A (C.57a)
( )2
0
sin 2
2 4
L
n
L n x Lx
n
π
π
= −
A (C.57 b)
( )2 2sin 2
2 4 2n n
L n L LL LL
n
π
π
= − = =
A A (C.57c)

Appendix C – Natural Frequencies and Modal Shapes for a beam
406
From inspection of Equation (C.57c), the reader can see that nA must be equal to
2± in order to satisfy Equation (C.54). In this thesis, the author uses 2+ . Using
real numbers, one will now show that Equation (C.57c) is true for a simply supported
beam by assuming the beam has a length L of 7.62 m and n has a value of 1; thus,
giving:
[ ]( )2 2
0
sin 2( )
2 4
L
n n
L n L LLx dx
n
πφ
π
= −
∫ A
( )2
7.62*27.62sin
7.62 7.622 7.62
2 4
π
π
= − =
(C.58)
In the case for a simply supported beam, nA is fully analytically. However, for the
cantilever beam, due to the complicated formula for the mode, the author will
integrate ( )n
xφ partially analytically and partially numerically. In order to evaluate
the undetermined amplitude nB for the cantilever beam, one normalises its
displacement function. Recalling Equation (C.20) as follows:
( ) ( )cos cosh
( ) sin sinh cos coshsin sinh
n nn n n n n n n
n n
a L a Lx a x a x a x a x
a L a Lφ
+= − − + −
+ B B (C.59a)
[ ]sin sinh cos coshn n n n n n n
C a x C a x a x a x= − + −B (C.59b)
whereby
cos cosh
sin sinh
n nn
n n
a L a LC
a L a L
+= −
+ (C.59c)

Appendix C – Natural Frequencies and Modal Shapes for a beam
407
Squaring Equation (C.59b) then gives
2 2 2 2 2( ) sin sin sinh sin cos sin coshn n n n n n n n n n n n n
x C a x C a x a x C a x a x C a x a xφ = − + −B
2 2 2sinh sin sinh sinh cos sinh coshn n n n n n n n n n n
C a x a x C a x C a x a x C a a x− + − +
2cos sin cos sinh cos cos coshn n n n n n n n n
C a x a x C a x a x a x a x a x+ − + −
2cosh sin cosh sinh cosh cos coshn n n n n n n n n
C a x a x C a x a x a x a x a x− + − + (C.60)
Simplifying Equation (C.60) gives
2 2 2 2 2 2 2( ) sinh sin 2 sinh sinn n n n n n n n n
x C a x C a x C a x a xφ = −B +
2 cos sin 2 cosh sin 2 cosh sinhn n n n n n n n n
C a x a x C a x a x C a x a x+ − +
2 22 sinh cos 2cosh cos cos coshn n n n n n n
C a a x a x a x a x a x− − + + (C.61)
Next, one integrates Equation (C.61) with limits from 0 to L; thus giving:
2 2 2 2 2 2 2
0 0 0 0
( ) sinh sin 2 sinh sin
L L L L
n n n n n n n n nx dx C a xdx C a xdx C a x a xφ
= + −
∫ ∫ ∫ ∫B
0 0 0
2 cos sin 2 cosh sin 2 cosh sinh
L L L
n n n n n n n n nC a x a xdx C a x a xdx C a x a xdx+ − +∫ ∫ ∫
2 2
0 0 0 0
2 sinh cos 2 cosh cos cos cosh
L L L L
n n n n n n nC a a xdx a x a xdx a xdx a xdx
− − + +
∫ ∫ ∫ ∫
2 2 2 22
0 0
sinh 2 sin 2
2 4 2 4
L L
n n n n n nn
n n
C x C a x C x C a x
a a
= − + + −
B
2 2
0
cos sinh cosh sinL
n n n n n n
n n
C a x a x C a x a x
a a
+ −

Appendix C – Natural Frequencies and Modal Shapes for a beam
408
2 2
0 0 0
cos cos cosh sin sinh coshL L L
n n n n n n n n n n
n n n n
C a x C a x a x C a x a x C a x
a a a a
+ − + − +
0 0
sin sinh cos cosh cosh sin cos sinhL L
n n n n n n n n n n
n n n n
C a x a x C a x a x a x a x a x a x
a a a a
+ − − + − −
0 0
sin 2 sinh 2
2 4 2 4
L L
n n
n n
a x a xx x
a a
+ + + +
(C.62)
Expanding Equation (C.25) and simplifying gives:
2 22 2
0
sinh 2 sin 2( )
4 4
L
n n n nn n
n n
C a L C a Lx dx L
a aφ
= + −
∫ B
2 2cos sinh cosh sinn n n n n n
n n
C a L a L C a L a L
a a+ −
2 2cos coshn n n n
n n
C a L C a L
a a− +
2 sin sinhn n
n
C a L a L
a−
cosh sin cos sinhn n n n
n n
a L a L a L a L
a a− −
sin 2 sinh 2
4 4
n n
n n
a L a L
a a
+ +
(C.63a)
or
2 2 2
2 2
0
cosh sinh cos sin cos sinh( )
2 2
L
n n n n n n n n nn n
n n n
C a L a L C a L a L C a L a Lx dx L
a a aφ
= + − +
∫ B
2 2 2cosh sin cos coshn n n n n n n
n n n
C a L a L C a L C a L
a a a− − +
2 sin sinh cosh sin cos sinhn n n n n n n
n n n
C a L a L a L a L a L a L
a a a− − −
cos sin cosh sinh
2 2
n n n n
n n
a L a L a L a L
a a
+ +
(C.63b)
Recalling the normalization equation in Equation (C.54), one must now find nB such
that the right hand side of Equation (C.63b) is equal to L.

Appendix C – Natural Frequencies and Modal Shapes for a beam
409
With the aid of real numbers, the author will show that the right hand side of Equation
(C.63b) is equal to the length of the beam. Using the exact same beam properties as
Section 5.3.1, the beam has a length L of 7.62, a mass per unit length m of 46 kg/m,
and a bending stiffness EI of 6 29.47 10 Nm .× Then by using Equations (C.27a),
(C.12b) and (C.59c), the first natural frequency of the beam 1ω is equal to 27.477
rad/sec, 1a has a value of 0.24609 and C1 has a value of -0.73410. Inputting these
constants into Equation (C.63b) for n = 1 then gives:
2 2 22 2 1 1 1 1 1 1 1 1 1
1 1
1 1 10
cosh sinh cos sin cos sinh( )
2 2
LC a L a L C a L a L C a L a L
x dx La a a
φ
= + − +
∫ B
2 2 2
1 1 1 1 1 1 1
1 1 1
cosh sin cos coshC a L a L C a L C a L
a a a− − +
1 1 1 1 1 1 1
1 1 1
2 sin sinh cosh sin cos sinhC a L a L a L a L a L a L
a a a− − −
1 1 1 1
1 1
cos sin cosh sinh
2 2
a L a L a L a L
a a
+ +
( ) ( ) ( ) ( ) ( ) ( )2 2
2
1
0.7341 cosh 1.8752 sinh 1.8752 0.7341 cos 1.8752 sin 1.87527.62
0.49217 0.49217
− −= + −
B
( ) ( ) ( ) ( ) ( ) ( )2 2
0.7341 cos 1.8752 sinh 1.8752 0.7341 cosh 1.8752 sin 1.8752
0.24608 0.24608
− −+ −
( ) ( ) ( ) ( )2 20.7341 cos 1.8752 0.7341 cosh 1.8752
0.24608 0.24608
− −− +
( ) ( ) ( ) ( ) ( )2 0.7341 sin 1.8752 sinh 1.8752 cosh 1.8752 sin 1.8752
0.24608 0.24608
−− −
( ) ( ) ( ) ( )cos 1.8752 sinh 1.8752 cos 1.8752 sin 1.8752
0.24608 0.49217− +
( ) ( )cosh 1.8752 sinh 1.8752
0.49217
+

Appendix C – Natural Frequencies and Modal Shapes for a beam
410
2
1 7.6200 11.6374 0.3131 2.0900 6.9730 0.2680 33.2318= + + − − + −B
2
118.1249 12.9395 3.8783 0.5810 21.5948 7.621+ − + − + = B (C.64)
The term 2
17.621B on the right hand side of Equation (C.64) must be equal to L, which
has a value of 7.62. Hence, 2
1B is approximately equal to 1. This implies that 2
1B must
be equal to 1.± In this thesis, 1B has a the value equal of -1. To show that this is true
for any value of n, the author conducts a second example, using the same beam
properties as before, but on this occasion one uses a value n = 3. Using Equations
(C.27b), (C.12b) and (C.59c), the third natural frequency of the beam 3ω is
approximately equal to 482.021 rad/sec, 3a has a value of 1.0308 and C3 has a value
of -0.9992. Inputting these constants into Equation (C.63b) for n = 3 then gives:
2 2 22 2 3 3 3 3 3 3 3 3 33 3
3 3 30
cosh sinh cos sin cos sinh( )
2 2
LC a L a L C a L a L C a L a L
x dx La a a
φ
= + − +
∫ B
2 2 2
3 3 3 3 3 3 3
3 3 3
cosh sin cos coshC a L a L C a L C a L
a a a− − +
3 3 3 3 3 3 3
3 3 3
2 sin sinh cosh sin cos sinhC a L a L a L a L a L a L
a a a− − −
3 3 3 3
3 3
cos sin cosh sinh
2 2
a L a L a L a L
a a
+ +
( ) ( ) ( ) ( ) ( ) ( )2 2
2
3
0.9992 cosh 7.8539 sinh 7.8539 0.9992 cos 7.8539 sin 7.85397.62
2.0614 2.0614
− −= + −
B
( ) ( ) ( ) ( ) ( ) ( )2 2
0.9992 cos 7.8539 sinh 7.8539 0.9992 cosh 7.8539 sin 7.8539
1.0308 1.0308
− −+ −
( ) ( ) ( ) ( )2 20.9992 cos 7.8539 0.9992 cosh 7.8539
1.0308 1.0308
− −− +

Appendix C – Natural Frequencies and Modal Shapes for a beam
411
( ) ( ) ( ) ( ) ( )2 0.9992 sin 7.8539 sinh 7.8539 cosh 7.8539 sin 7.8539
1.0308 1.0308
−− −
( ) ( ) ( ) ( )cos 7.8539 sinh 7.8539 cos 7.8539 sin 7.8539
1.0308 2.0614− +
( ) ( )cosh 7.8539 sinh 7.8539
2.0614
+
2
3 7.620 803494.702 0.000 0.000 1247.677 0.000 1608237.081= + + − − + −B
2
32497.290 1249.614 0.000 0.000 804742.378 7.618+ − + − + = B (C.65)
As before, the term 2
37.618B on the right hand side of Equation (C.65) must be equal
to the length of the beam L, which has a value of 7.62. Therefore, 2
3B has a value
almost equal to 1. This then implies that 2
3B must be equal to 1.± In this thesis, 3B
has a the value equal of -1.

Appendix C – Natural Frequencies and Modal Shapes for a beam
412

Appendix D – Equation for Damping
413
Appendix D
Equation for Damping
D.1 Introduction
In Appendix A, the development of the differential equation of an elastic beam,
included a damping term of 2b
mω without much explanation; however, with the
derivation of the modal equation in Appendix C, one can finally develop this damping
term. Additionally, the numerical damping matrix term C is also derived
D.2 Viscous Damping
Recalling Equation (A.22) the differential equation of an elastic beam is given as:
4 2
4 2( , )
v v vEI m c p x t
tx t
∂ ∂ ∂+ + =
∂∂ ∂ (D.1)
where EI is constant and c is the unknown damping term. In addition, the subscripts
have also been dropped. In order to solve Equation (D.1), one uses the method of
modal superposition; whereby ( ),v x t can be represented as follows
( ) ( ) ( ),n n
n
v x t r t xφ=∑ (D.2)

Appendix D – Equation for Damping
414
where ( )n xφ is the n-th characteristic shape defined above by Equation (C.12a) and
( )nr t is the n-th function of time which has to be calculated. Substituting Equation
(D.2) into (D.1) gives the following equation:
( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 1
,N N N
iv
n n n n n n
n n n
EI r t x m r t x c r t x p x tφ φ φ= = =
+ + =∑ ∑ ∑&& & (D.3)
where a dot over ( )nr t represents a derivative with respect to time, and a dash over
( )n xφ represents a derivative with respect to x. Substituting Equation (C.7) and
(C.12b) into Equation (D.3) to eliminate the fourth derivative of ( )n xφ gives the
following:
( ) ( ) ( ) ( ) ( ) ( ) ( )4
1 1 1
,N N N
n n n n n n n
n n n
EI r t a x m r t x c r t x p x tφ φ φ= = =
+ + =∑ ∑ ∑&& & (D.4)
Multiplying both sides of Equation (D.4) by ( )i xφ , i = 1, 2, 3, … N, integrating along
the beam length, and using Equation (C.21) and (C.22) gives the following set of
ordinary differential equations governing ( )nr t , n = 1, 2, 3 … N
( ) ( ) ( ) ( ) ( ) ( )4
1 1 1 0
, =1,
LN N N
n n in n in n in i
n n n
EI r t a L m r t L c r t L p x t x dx i Nδ δ δ φ= = =
+ + =∑ ∑ ∑ ∫&& & (D.5)
where 1in
δ = when i n= , and 0in
δ = when i n≠ . Rearranging Equation (D.5) in the
order of the mass, damping and stiffness terms with the forcing term on the right-hand
side gives the following:

Appendix D – Equation for Damping
415
( ) ( ) ( ) ( ) ( ) ( )4
1 1 1 0
, 1,
LN N N
n in n in n n in i
n n n
mL r t cL r t EIL r t a p x t x dx i Nδ δ δ φ= = =
+ + = =∑ ∑ ∑ ∫&& & (D.6)
Recalling Equation (C.12b), n
a is defined as:
24n na m EIω= (D.7)
Then, substituting Equation (D.7) into (D.6) gives:
( ) ( ) ( ) ( ) ( ) ( )2
1 1 1 0
, 1,
LN N N
n in n in n n in i
n n n
mL r t cL r t mL r t p x t x dx i Nδ δ ω δ φ= = =
+ + = =∑ ∑ ∑ ∫&& & (D.8)
Expanding Equation (D.8) gives the following equation:
( ) ( ) ( ) ( )( )1 1 2 2 3 3 ... i i i N iN
mL r t r t r t r tδ δ δ δ+ + + +&& && && &&
( ) ( ) ( ) ( )( )1 1 2 2 3 3 ... i i i N iN
cL r t r t r t r tδ δ δ δ+ + + + +& & & &
( ) ( ) ( ) ( )( ) ( ) ( ) ( )2 2 2 2
1 1 1 2 2 2 3 3 3
0
... , 1,
L
i i i n N iN imL r t r t r t r t p x t x dx i Nω δ ω δ ω δ ω δ φ+ + + + + = =∫&
(D.9)
Examining the Kronecker Delata function in
δ in Equation (D.9), one finds:
( ) ( ) ( ) ( ) ( )2
1 1 1 1 1
0
,
L
mLr t cLr t m Lr t p x t x dxω φ+ + = ∫&& & at 1i =
( ) ( ) ( ) ( ) ( )2
2 2 2 2 2
0
,
L
mLr t cLr t m Lr t p x t x dxω φ+ + = ∫&& & at 2i =
( ) ( ) ( ) ( ) ( )2
3 3 3 3 3
0
,
L
mLr t cLr t m Lr t p x t x dxω φ+ + = ∫&& & at 3i =
or
( ) ( ) ( ) ( ) ( ) ( )2
0
, 1,
L
i i i i imLr t cLr t m Lr t p x t x dx i Nω φ+ + = =∫&& & (D.10)

Appendix D – Equation for Damping
416
Next, by dividing across by L and putting the right-hand side of Equation (D.10) equal
to zero gives:
( ) ( ) ( )20i i i imr t cr t m r tω+ + =&& & (D.11)
The solution of Equation (D.11) now becomes:
( ) st
ir t Ae= (D.12)
where s and the constants on integration A may be real or complex, depending on
the relative values of the mass, stiffness and damping terms. Substituting Equation
(D.12) into (D.11), one can find the roots of the following equation as:
2 2 0st
ims cs m eω + + = (D.13)
where s defines two roots as follows:
2 2 214
2 2i
cs c m
m mω= − ± −
( )221
22 2
i
cc m
m mω= − ± − (D.14)
From Equation (D.12), one can consider three cases:
( )22
0
2 0
0
ic mω
>
− =<
(overdamped) (D.15a)
(critical damping) (D.15b)
(underdamped) (D.15c)

Appendix D – Equation for Damping
417
However, only Equation (D.15c) is of interest in this thesis. In the case of
underdamped structures, that is, ( )22 2 0,ic mω − <
the values of s in Equation
(D.14) become the following complex number as:
( ) ( )2 22 21 1
2 22 2 2 2
i i
c cs m c i m c
m m m mω ω = − ± − − = − ± −
( )
( ) ( )
2 2 22
2 2
2
2 22 2
i
i
m cc c ci i
m mm m
ωω
−= − ± = ± − (D.16a)
or
2 2
b i bs iω ω ω= − ± − (D.16b)
and
2b
c
mω= (D.16c)
where b
ω is the damped natural frequency of the beam. Equation (D.16b) can then be
rewritten as follows
2b
c mω= (D.17)
The unknown damping term c in Equation (D.1) is now replaced with Equation
(D.17), which fully derives Equation (A.22) as:
4 2
4 22 ( , )b
v v vEI m m p x t
tx tω
∂ ∂ ∂+ + =
∂∂ ∂ (D.18)
Additionally, Equation (D.16b) can be substituted into (D.12) giving the following:
( ) ( ) ( )2 2exp expi b i b
r t t i tω ω ω= − ± − (D.19)

Appendix D – Equation for Damping
418
The imaginary term, 2 2 ,i bω ω− in Equation (D.19) can also be defined as:
2
2 2 21 1bi b i i i di
i
ωω ω ω ω ξ ω
ω
− = − = − =
(D.20)
With the aid of Equation (D.16c) and the natural frequency of the system without
damping, i.e. i
k mω = , the damping ratio ξ can be written as follows:
2
22 4 2
b
i
i
c m cc k
m m m k mk
ωξ
ω= = = = (D.21)
Substituting Equation (D.20) and (D.21) into Equation (D.19) gives:
( ) ( ) ( )exp expi i i di
r t t i tξ ω ω= − ±
( ) ( )2exp exp 1i i i i
t i tξ ω ω ξ= − ± − (D.22)
With the aid of Thomson (1993), Equation (D.22) can be written as follows:
( ) ( ) ( )2exp sin 1i i i i
r t X t tξ ω ξ ω ϕ= − − + (D.23)
where the arbitrary constants and X ϕ are determined from the initial conditions.
Equation (D.23) can be simplified using the following general expression:
( )sin sin cos cos sinA B A B A B+ = + (D.24)
resulting in the following equation:

Appendix D – Equation for Damping
419
( ) ( )( )2 2exp sin 1 cos cos 1 sini i i i i
r t X t t tξ ω ξ ω ϕ ξ ω ϕ= − − ⋅ + − ⋅ (D.25a)
or
( ) ( )2 2sin 1 cos cos 1 sini it
i i ir t e X t X X t X
ξ ω ξ ω ϕ ξ ω ϕ−= − ⋅ + − ⋅ (D.25b)
The effects of Equation (D.25) are shown in Figure D.1.
Figure D.1: Damping oscillation for underdamped motion (Thomson, 1993)
D.3 Numerical damping solution
The damping matrix is dissimilar to the global mass and stiffness matrices because it
cannot be constructed from the element damping matrices during assembly and it
must approximate the overall energy dissipation during the system response (Bathe,
1996). By means of mode superposition and assuming that the damping is
proportional to the vertical velocity of the beam, the normalization of the damping
matrix can be written as follows:
2T
i S i i iω ξ=ψ C ψ (D.26)
where iω is the natural frequency, iξ is the damping ratio of the i-th equation,
eigenvector iψ is the mode shape associated with this eigenvalue and SC is the
itω
( )exp i iX tξ ω−
sinX ϕ
X

Appendix D – Equation for Damping
420
damping matrix. The mass matrix MS and stiffness matrix KS of the entire structure
are then related to the damping matrix CS using the Rayleigh Method as follows:
0 1S S Sα α= +C M K (D.27)
where 0α and 1α are damping constants. Substituting Equation (D.27) into (D.26):
( )0 1 2T
i S S i i iα α ω ξ+ =ψ M K ψ (D.28)
According to Bathe (1996), when the eigenvector iψ is normalised for the mass and
stiffness matrices, one gets the following equations:
1T
i S i =ψ M ψ (D.29a)
2T
i S i iω=ψ K ψ (D.29b)
By assuming two unequal natural frequencies, then gives:
2
0 1 2i i iα ω α ω ξ+ = (D.30a)
2
0 1 2j j jα ω α ω ξ+ = (D.30b)
Subtracting Equation (D.44b) from (D.44a) then gives:
( ) ( )2 2
1 2i j i i j j
α ω ω ω ξ ω ξ− = − (D.31a)
or
1 2 2
2 2i i j j
i j
ω ξ ω ξα
ω ω
−=
− (D.31b)

Appendix D – Equation for Damping
421
Substituting Equation (D.31b) into Equation (D.30a) and solving for 0α yields:
3 2 3 2
2
0 2 2 2 2
2 2 2 2 2 22
i i j j i i i j j i i i i j
i i i
i j i j
ω ξ ω ξ ω ξ ω ω ξ ω ξ ω ξ ωα ω ω ξ
ω ω ω ω
− − + + −= − + = − −
( )2 2
2 2 2 2
22 2 i j i j j ji j j i i j
i j i j
ω ω ω ξ ω ξω ω ξ ω ξ ω
ω ω ω ω
−−= =
− − (D.32)
Should it be considered that i j
ξ ξ ξ= = , then Equation (D.31b) and (D.32) can further
reduced to the following:
( ) ( )( ) ( )0 2 2
2 2 2i j i j i j i j i j
i j i ji j i j
ω ω ω ξ ω ξ ω ω ξ ω ω ω ω ξα
ω ω ω ωω ω ω ω
− −= = =
− ++ − (D.33a)
( ) ( )( )( )1 2 2
2 2 2i j i j
i j i ji j i j
ξ ω ω ξ ω ω ξα
ω ω ω ωω ω ω ω
− −= = =
− ++ − (D.33b)
Rearranging Equation (D.30a) with subscripts i and j dropped, the relationship
between the damping coefficient ξ and the natural frequencies ω for Rayleigh
damping can be seen in Figure D.2.
0
1
2
3
4
5
6
7
8
0 1 2 3 4 5 6 7 8
Mass Proportional
Stif fness Proportional
Combined
Figure D.2: Damping coefficient versus natural frequencies for Rayleigh damping
ω
ξ
0
01, when 0
2
αξ α
ω= =
10, when 0
2
α ωξ α= =
0 1
2 2
α α ωξ
ω= +

Appendix D – Equation for Damping
422
0 1
2 2
α ωαξ
ω= + (D.34)
The equation of equilibrium governing the linear dynamic response of a structure,
including damping, is now written as follows:
S S S S S S S+ +M U C U K U = F&& & (D.35)
where MS, CS and KS are the global mass, damping and stiffness matrices; FS is the
force vector; , and S S S
U U U& && are the displacement, velocity and acceleration vectors
of the entire finite element assemblage.

Appendix E –Newmark Time Integration Scheme
423
Appendix E
Newmark Time Integration Scheme
E.1 Introduction
In this appendix, the author derives the Newmark time integration scheme as this
system is used extensively throughout this thesis to solve the finite element equations.
E.2 Newmark Time Integration
The Newmark time integration scheme is an implicit scheme because it solves the
equation of motion at time ,t t+ ∆ by directly combining the displacements, velocities
and acceleration equations at time ;t t+ ∆ whereas, an explicit scheme solves the
equation of motion at time ,t t+ ∆ by combining the displacements, velocities and
acceleration equations at time .t Recalling Equation (D.47), the equation of motion is
defined as follows:
MU + CU + KU = F&& & (E.1)
where M, C and K are the mass, damping and stiffness matrices, respectively, F is the
external force vector, and , and U U U& && are the displacement, velocity and acceleration
vectors of the finite element assembly. Therefore, at time t, Equation (E.1) becomes

Appendix E –Newmark Time Integration Scheme
424
t t t tMU + CU + KU = F&& & (E.2)
It is assumed that at time t, the values of the displacement, velocity and acceleration
are known, while at the end of the time interval t t+ ∆ these values are unknown.
With the aid of Taylor series, the displacement and velocity at time t t+ ∆ can be
written as follows:
2 3
. . .2 6
t t t t t t
t tt+∆
∆ ∆= + ∆ + + +U U U U U& && &&& (E.3a)
2
. . .2
t t t t t
tt+∆
∆= + ∆ + +U U U U& & && &&& (E.3b)
Newmark (1952) then condensed these equations to the following form by
introducing the parameters β and γ:
23
2t t t t t t
tt tβ+∆
∆= + ∆ + + ∆U U U U U& && &&& (E.4a)
2
t t t t tt tγ+∆ = + ∆ + ∆U U U U& & && &&& (E.4b)
By assuming that the acceleration remains linear within the time step, one gets the
following equation:
( )t t t
tt
+∆ −=
∆
U UU
&& &&
&&& (E.5)
Substituting Equation (E.5) into Equation (E.4a) and (E.4b) gives the displacement
and velocity at time t t+ ∆ as defined by Newmark (1959) as follows:

Appendix E –Newmark Time Integration Scheme
425
( )23
2
t t t
t t t t t
tt t
tβ
+∆
+∆
−∆= + ∆ + + ∆
∆
U UU U U U
&& &&
& &&
22 2
2t t t t t t
tt t tβ β+∆
∆= + ∆ + + ∆ − ∆U U U U U& && && &&
21
2t t t t t
t tβ β +∆
= + ∆ + − + ∆
U U U U& && && (E.6a)
( )2
t t t
t t t tt t
tγ
+∆
+∆
−= + ∆ + ∆
∆
U UU U U
&& &&
& & &&
( ) t t t t t
t tγ +∆= + ∆ + ∆ −U U U U& && && &&
( )1t t t t
tγ γ +∆ = + − + ∆ U U U& && && (E.6b)
Examining Equation (E.6), the acceleration term at the end of the time interval t t+∆U&& ,
despite being unknown at this time, can be related to the displacement and velocity at
time .t t+ ∆ By rearranging Equation (E.6a), the acceleration at time t t+ ∆ can be
written as:
( )2
1 1 11
2t t t t t t t
t tβ β β+ ∆ + ∆
= − − − −
∆ ∆ U U U U U&& & && (E.7)
Substituting Equation (E.7) into (E.6b), then gives the velocity at time t t+ ∆ as:
( ) ( )2
1 1 11 1
2t t t t t t t t t
tt t
γ γβ β β
+∆ +∆
= + − + − − − − ∆
∆ ∆ U U U U U U U& & && & &&
( ) ( )12
t t t t t t tt tt
γ γ γγ γ
β β β+∆
= + − ∆ + − − − − ∆
∆ U U U U U U& && & &&
( ) 1 12
t t t t tt
t
γ γ γ
β β β+ ∆
= − + − − ∆ −
∆ U U U U& && (E.8)

Appendix E –Newmark Time Integration Scheme
426
At time t t+ ∆ Equation (E.2) now becomes:
t t t t t t t t+∆ +∆ +∆ +∆MU + CU + KU = F&& & (E.9)
Substituting Equation (E.7) and (E.8) into Equation (E.9) gives:
2
1t t
t t
γ
β β+ ∆
+ + =
∆ ∆ M C K U
2
1 1 11
2t t t t t
t tβ β β+∆
+ + + −
∆ ∆ F M U U U& &&
1 12
t t ttt
γ γ γ
β β β
+ + − + − ∆
∆ C U U U& && (E.10)
Solving Equation (E.10), one finds the displacement value t t+∆U at time t t+ ∆ . This
known value can then be substituted into Equation (E.7) and (E.8) to obtain the
acceleration and velocity at time ,t t+ ∆ in accordance with ANSYS Theory
Reference (2002).
Alternatively, one can assume a value for the acceleration t t+∆U&& at the end of the time
interval in order to compute the velocity t t+∆U& and
t t+∆U using Equation (E.6b) and
(E.6a). The computed displacement t t+∆U is then used to compute the resisting force
for the structure. Next the applied loads and resisting forces t t+∆F at the end of the
interval are used to recompute the acceleration t t+∆U&& at the end of the time interval.
The derived acceleration is then compared with assumed acceleration. If these values
are the same, the calculation is complete. If the values are different, then the
calculation is repeated using a different assumed acceleration (Newmark, 1959).

Appendix E –Newmark Time Integration Scheme
427
E.3 Defining the parameter γ and β
According to Newmark (1959), the term γ must have a value of 1 2 , to avoid
damping the results; therefore, one can rewrite Equation (E.6b) as follows:
2 2
t t tt t t t+∆+∆
= + + ∆
U UU U
&& &&& & (E.11)
In Figure E.1, the author plots the relationship of three β values on the acceleration
between tU&& and
t t+∆U&& over the time interval t∆ . Firstly, when β has a value of 1 6,
the acceleration over the time interval t∆ remains linear. Secondly, one can see that
when β has a value of 1 4, a uniform value of acceleration occurs during the time
interval equal to the mean of the initial and final values of acceleration, and thirdly,
when β has a value of 1 8, a step function with a uniform value equal to the initial
value of the first half of the time interval and a uniform value equal to the final value
for the second half of the time interval can be seen. In ANSYS, the default setting for
γ is 1 2 and β is 1 4 . These parameters determine the accuracy and stability of the
scheme and are unconditionally stable at these particular values.
Figure E.1: Plot of acceleration between time t and t t+ ∆ for three values of β
t t t+ ∆
time
Acc
eler
atio
n
t∆
t t+∆U&&
tU&&
1 8β =
1 6β =
1 4β =

Appendix E –Newmark Time Integration Scheme
428

Appendix F - Boyne Viaduct - Technical Parameters
429
Appendix F
Boyne Viaduct – Technical Parameters
F.1 Dimensions & Geometrical Properties
In this study, one is primarily interested in the centre span of the Boyne Viaduct
railway bridge; hence, all dimensions, sections sizes and bridge properties related to
this particular bridge structure are present in this section. Figure F.1 presents a side
view, while a sectional view of the bridge structure can be seen in Figure F.2, along
with all critical dimensions.
Figure F.1: Front elevation of Boyne Viaduct railway-bridge
Bridge Length = 80.77m
Number of spans = 10
Distance between main nodes of each span = 8.077m
Distance between the upper and lower chords at the supports = 5.80m
Distance between the upper and lower chord at midspan = 9.14m
All other heights along the bridge = ( ) ( )9.14 5.80 sin 5.80xL
π− ⋅ +
Width between truss = 5.5m
Track gauge = 1.5m

Appendix F - Boyne Viaduct - Technical Parameters
430
Figure F.2: Sectional view of Boyne Viaduct railway-bridge
A three-dimensional representation of the Boyne Viaduct railway bridge is presented
in Figure F.3, which only takes into account the main nodes of the truss. One can
observe from the diagram, two longitudinal beams running parallel with truss. The
main purpose of these beams is to transfer the weight of the train safely to cross
beams (located perpendicular to the longitudinal beams at every 8.077m), which in
turn transfers the weight to the truss.
Figure F.3: Three-dimensional view of Boyne Viaduct railway-bridge
In Table F.1 the bridge fixities of the three-dimensional model are defined.
Support 1
Support 3
Support 5
Support 7
Support 2
Support 4
Support 6
Support 8
Longitudinal beams
Rail Rail

Appendix F - Boyne Viaduct - Technical Parameters
431
Table F.1 Support Fixities
Support X Y Z Rot X Rot Y Rot Z
1 Fixed Fixed Fixed Free Free Free
2 Free Fixed Fixed Fixed Fixed Free
3 Free Fixed Free Free Free Free
4 Free Fixed Free Free Free Free
5 Free Fixed Free Free Free Free
6 Free Fixed Free Free Free Free
7 Fixed Fixed Fixed Free Free Free
8 Free Fixed Fixed Fixed Fixed Free
Next, using the geometrical dimensions of a section, one can evaluate some sectional
properties of typical members of the truss. In each case, the sectional properties
related to that particular section are given in Table F.2. A cross-sectional view of the
upper chord of the bridge is shown in Figure F.4. It should be noted that no sectional
views are available for the lower chord; therefore, it is assumed that the properties of
the lower chord are similar to those of the upper chord of the truss.
Figure F.4: Cross-sectional view of the upper chord of the truss
Next, one examines a typical vertical member located along the bridge as illustrated in
Figure F.5. It is assumed that all vertical members are of a similar shape and size.

Appendix F - Boyne Viaduct - Technical Parameters
432
Figure F.5: Cross-sectional view of a vertical member
A typical diagonal member located along the bridge is illustrated in Figure F.6. Again
it is assumed that all diagonal members are of a similar shape and size.
Figure F.6: Cross-sectional view of a diagonal member on bridge
Next, one considers the longitudinal beams that are located beneath the bridge
decking and run parallel to the track. Figure F.7 shows a typical cross-sectional view
of the longitudinal beam
Figure F.7: Cross-sectional view of the longitudinal beam on bridge

Appendix F - Boyne Viaduct - Technical Parameters
433
Finally, a cross-sectional view of a typical cross beams is presented in Figure F.8.
Figure F.8: Cross-sectional view through the cross beam on bridge
Table F.2 Section properties of key bridge members
Cro
ss-S
ecti
on
Are
a (m
2)
Mas
s p
er m
etre
(t/
m3)
– a
ll s
teel
pro
per
ties
Sec
on
d m
om
ent
of
iner
tia
abou
t Y
-Y (
m4)
Sec
on
d m
om
ent
of
iner
tia
abou
t Z
-Z (
m4)
Th
ick
nes
s in
Y (
m)
Th
ick
nes
s in
Z (
m)
Upper & Lower Chords 0.05 0.393 - - 0.65 0.76
Vertical Members 0.025 0.196 - - 0.45 0.45
Diagonal Members 0.012 0.094 - - 0.3 0.3
Longitudinal Beams 0.032 0.251 0.00014 0.0034 0.91 0.4
Cross Beams 0.044 0.345 0.00021 0.0042 0.94 0.46

Appendix F - Boyne Viaduct - Technical Parameters
434
F.2 Static analysis of an unloaded Boyne Viaduct
Table F.3 presents results obtained from a static analysis of an unloaded Boyne
Viaduct railway bridge using the dimensions and geometrical properties of Section
F.1. These results include the vertical displacement, axial force in the upper and lower
chords and bending moment at mid-span of the bridge as well as its overall weight. It
should be noted that the geometrical properties of the simply supported beam are
defined in Section F.3.
Table F.3: Static analysis of the Boyne Bridge
Sim
ply
su
pp
ort
ed b
eam
Tw
o-d
imen
sio
na
l tr
uss
Th
ree-
dim
ensi
on
al
bri
dg
e
Maximum deflection at mid-span (m) = 0.0256 0.0256 0.0300
Total weight of the bridge structure (kN) = 933.0 933.0 2527.4
Maximum axial force in the upper chord at midspan (kN) = N/A -1059 -1396.8
Maximum axial force in the lower chord at midspan (kN) = N/A 1052.8 904.8
Maximum bending moment at midspan (kNm) = 9420 N/A 104.6*
* = longitudinal beam of the three-dimensional bridge
F.3 Representing a truss as a simply supported beam
In Chapter 5, the author analysis the Boyne Viaduct as a simply supported beam using
the developed modal model; therefore, this sub-section examines Fryba’s (1999)
concept of modelling a truss railway bridge as a simply supported beam. In the
previous section, one found that the overall weight of the two-dimensional truss is 933

Appendix F - Boyne Viaduct - Technical Parameters
435
kN, thus, the mass per unit length m of the simply supported beam can be calculated
as follows:
Gm
gL=
933.0
80.77 9.81=
× 31.1775 t/m= (F.1)
where G is the total weight of the bridge, g is gravity, and L is the length of the beam.
It is also found that the static deflection at mid-span of the two dimensional truss is
equal to 0.0253 m. Therefore, using the equation for the deflection of a simply
supported beam subjected to a uniformly disturbed load as given in Equation (F.2),
one can compute an appropriate second moment of inertia I for the beam.
45
384st
mgLv
EI= (F.2)
where vst is the static deflection at mid-span of the beam, and E is Young’s Modulus
of Elasticity of the beam. Rearranging Equation (F.2) in terms of I gives:
45
384st
mgLI
Ev= (F.3)
Assuming E is 2.05 x 108 kN/m
2, then using Equation (F.3), I is 1.22 m
4. Since
ANSYS requires the user to specify the cross-section area of two and three-
dimensional beam elements, one assumes that the density of the steel used in the
simply supported beam ρ is 7.85 t/m3; therefore, the cross-section area A = m/ρ, which
is equal to 0.15 m2.

Appendix F - Boyne Viaduct - Technical Parameters
436
F.4 Modal analysis of the Boyne Viaduct railway bridge
The first 5 natural frequencies (measured in Hertz) for the Boyne Viaduct are given in
Table F.4. These results include an analytical modal solution using Equation (C.48),
and three finite element modal solutions with the bridge represented as a simply
supported beam, two-dimensional truss and three-dimensional.
Table F.4: Natural frequencies of the Boyne Viaduct.
Natural frequencies in the y-direction (Hz)
j = 1 j = 2 j = 3 j = 4 j = 5
Simply supported beam (analytical) 3.51 14.04 31.58 56.14 87.73
Simply supported beam 3.49 13.70 29.97 51.32 76.72
Two-dimensional truss 3.40 9.87 15.97 21.01 28.78
Three-dimensional bridge 3.12 8.72 13.86 18.28 24.99
In Figure F.9, F.10 and F.11, the author plots the first 5 mode shapes of the simply
supported beam, two-dimensional truss and three-dimensional truss, respectively.
(a) 1st mode – 3.49 Hz (b) 2
nd mode – 13.70 Hz
(c) 3rd
mode – 29.97 Hz (d) 4th
mode – 51.32 Hz
(e) 5th
mode – 76.72 Hz
Figure F.9 First 5 modes shapes in the y-direction for the simply supported beam

Appendix F - Boyne Viaduct - Technical Parameters
437
(a) 1st mode – 3.40 Hz (b) 2
nd mode – 9.87 Hz
(c) 3rd
mode – 15.97 Hz (d) 4th
mode – 21.01 Hz
(e) 5th
mode – 28.78 Hz
Figure F.10 First 5 modes shapes in the y-direction for the two-dimensional truss
(a) 1st mode – 3.12 Hz (b) 2
nd mode – 8.72 Hz
(c) 3rd
mode – 13.86 Hz (d) 4th
mode – 18.28 Hz

Appendix F - Boyne Viaduct - Technical Parameters
438
(e) 5th
mode – 24.99 Hz
Figure F.11 First 5 modes shapes in the y-direction for the three-dimensional truss

Appendix G – Railway Vehicle Dynamics
439
Appendix G
Railway Vehicle Dynamics
G.1 Introduction
Since this thesis involves the dynamic response of vehicle traversing a railway bridge,
it is important that each railway vehicle is simulated correctly. In Chapter 3, the
author is primarily interested in modelling each railway vehicle as a series of moving
forces; whereas, in Chapter 4, 5 and 6 both a two-dimensional and three-dimensional
railway vehicle, comprising of a vehicle body, bogies and axles separated by primary
and secondary suspensions, is sought. The railway vehicles adopted in this study are
the 201 Class Irish-Rail locomotive (six-axles) as well as the Mark3 railway coach
(four axles). A photo of the 201 Class locomotive and Mark3 railway coach is shown
in Figure G.1, respectively. According to Wikipedia (2008), the 201 Class locomotive
is the most powerful diesel locomotives operating in Ireland since 1994. It has an
overall weight of approximately 111.5 tonnes and a maximum speed of 164 km/h
(102 mph). The Mark3 railway coach is a passenger carriage and has an overall
weight of approximately 48 tonnes.

Appendix G – Railway Vehicle Dynamics
440
Figure G.1: Photos of Irish-Rail railway vehicles: (a) 201 Class Irish-Rail
locomotive; (b) Mark3 railway coach
G.2 Axle spacing and weights as a moving force
The axle spacing and weights of the 201 Class locomotive and Mark3 railway coach
were supplied by the Irish Rail’s Structural Design Office, Inchicore, Dublin and are
presented in Figure G.2. As illustrated in Figure G.2, each wheel of the locomotive
and railway coach exerts a force of 91.25 kN on the rail and each wheel of the railway
coach exerts a force of 58.86 kN on the rail, respectively. These values are computed
as follows:
(a)
(b)

Appendix G – Railway Vehicle Dynamics
441
Wheel load per track Overall weight of the vehicle in tonnes gravity
Number of axles two wheels per axle
×=
×
Locomotive wheel load 111.5 9.81
= 91.25 kN6 2
×=
×
Railway coach wheel load 48 9.81
= 58.86 kN4 2
×=
×
Additionally, to ensure that the Boyne Viaduct railway bridge experiences the full
weight of the train over its entire length, the author has chosen that each train consists
of a single six-axle locomotive, 201 Class type, followed by three four-axle Mark3
railway coaches such that the total distance between the front axle and rear axle of the
train is equal to ( ) ( )21.051 3 23.000 1.969 2.200 85.882 m.+ × − + = Examining Figure
G.2, the reader can also see that the distance between two axles of a single bogie Aw
are 1.689 m and 2.019 m for the 201 Class locomotive and 2.600 m for the Mark3
railway coaches. In addition, the distance between the rear axle of the locomotive and
the front axle of the railway carriage Cw is 1.969 2.200 4.169 m,+ = and the distance
between the rear axle of a carriage and front axle of the carriage behind it Cw is
2.200 2.200 4.400 m.+ = Both of these lengths, Aw and Cw, are clearly shorter than
the distance between the rear axle of front bogie and the front axle of the rear bogie
(Bw–Aw), which is 9.697 for the locomotive and 13.400 m for the railway carriage.
Hence, one can state that ( ).w w w w
A C B A< < −
(a)
201 Class locomotive
Gross Weight = 111.5 tons
Axle Weight = 18.6 tons
Axle Load = 182.50 kN
Wheel Load = 91.25 kN

Appendix G – Railway Vehicle Dynamics
442
Figure G.2: Typical axle spacing and load of Irish-Rail vehicles: (a) 201 Class
locomotive; (b) Mark 3 railway coach
G.3 Axle positioning for maximum loading of Boyne Bridge
Throughout this thesis, the author has been dividing the dynamic results (deflection
and axial forces) by the maximum static results at mid-span of the loaded Boyne
Viaduct Railway Bridge to compute the dynamic amplification factor DAFU and
DAFA. The maximum static results (deflection and axial forces) at mid-span of the
Boyne Bridge are determined from the position of the front axle of the train. For a
single moving load, the axle is positioned at 80.77/2 = 40.385 m from the left hand
support, while for multiple moving forces the front axle is positioned at 60.577 m
from the left hand support, for the maximum static load, as shown in Figure G.3.
Figure G.3: Axle positioning that causes the maximum static results of Boyne
Bridge: (a) single moving load; (b) multiple moving forces
(b)
Mark 3 Railway Coach
Gross Weight = 48 tons
Axle Weight = 12 tons
Axle Load = 117.72 kN
Wheel Load = 58.86 kN
(a)
(b)
40.385 m
60.577 m

Appendix G – Railway Vehicle Dynamics
443
Figure G.3b shows that the maximum static results (deflection and axial forces) occur
when the rear wheel of the locomotive is positioned slightly to the right of the mid-
span of the Boyne Bridge, mainly because the locomotive is 130% heavier than a
single railway carriage. The maximum static deflections at mid-span of the loaded
Boyne Bridge used to compute DAFU are:
Deflection of 2D bridge due to a single moving load (used in Figure 3.27a) = 40.91 mm
Deflection of 2D bridge due to multiple moving loads (used in Figure 3.39) = 31.08 mm
Deflection of 3D bridge due to multiple moving loads (used in Figure 3.45a) = 27.66 mm
One can see that the maximum static deflection of the two-dimensional bridge for the
single moving point force, which has a P/G ratio of 1, is approximately 30% greater
than the maximum static deflection of the same bridge for the multiple moving forces.
Nonetheless, the author shows with the aid of Figure G.4 that the dynamic
amplification factor remains unchanged even when the P/G ratio is reduced to 0.7.
1.00
1.05
1.10
1.15
1.20
0 50 100 150 200 250 300
Speed (km/hr)
DA
FU
Multiple Moving Loads
Single Moving Load - P/G = 1.00 - Figure 3.28
Single Moving Load - P/G = 0.7
Figure G.4: Dynamic amplification factor unchanged even when the P/G ratio for a
single moving load is reduced from 1.0 to 0.7

Appendix G – Railway Vehicle Dynamics
444
The maximum static deflection of the loaded two-dimensional Boyne Bridge, for a
single moving point force with a P/G ratio of 0.7, is equal to 28.64 mm. The
maximum static axial forces at mid-span of the loaded Boyne Bridge used to compute
DAFA are as follows:
Bottom chord of 2D bridge for the single moving load (used in Figure 3.27b) = 1834 kN
Top chord of 2D bridge for the single moving load (used in Figure 3.27b) = -1909 kN
Bottom chord of 2D bridge for the multiple moving loads (used in Figure 3.40b) = 1346 kN
Top chord of 2D bridge for the multiple moving loads (used in Figure 3.40b) = -1369 kN
Bottom chord of 3D bridge for the multiple moving loads (used in Figure 3.45b) = 871 kN
Top chord of 3D bridge for the multiple moving loads (used in Figure 3.45c) = -1350 kN
G.4 Exact model with overlapping time functions
In Section 3.3.1.2, the author presents the simple model with overlapping time
functions, which can be seen again in Figure G.5. This figure shows the spatial and
time domain of two moving forces, with the same magnitude, traversing a beam; for
several values of wA l for node I. For completeness, the author will now plot the time
domains, of the two moving forces using the exact model with overlapping time
functions (forces and moment) as illustrated in Figure G.6.
(a) Influence of two point forces at a distance 2l apart on node i
2wA l=
1Q1P
l
i
P
4l
c
t0
(1)
(2)
(3)
(4)
(5)
(6)

Appendix G – Railway Vehicle Dynamics
445
(b) Influence of two point forces at a distance 1.5l apart on node i
(c) Influence of two point forces at a distance l apart on node i
(d) Influence of two point forces at a distance 0.5l apart on node i
Figure G.5: Relationship between spatial and time domain under different load
conditions for two moving forces using the simple model
7
2
l
c
t
P
1Q 1P
1.5wA l=
l
i
3l
cl
wA l=
1Q1P
i t
P
t
0
0
0
(1) P1 arrives on node i-1; (2) P1 arrives on node i; (3) P1 arrives on node i+1
(4) Q1 arrives on node i-1; (5) Q1 arrives on node i; (6) Q1 arrives on node i+1
(1)
(2)
(3)
(5)
(6)
(4)
(1)
(2)
(6)
(6) 5
2
l
cl
0.5wA l=P
i
1Q 1P
(1)
(2)
(3)
(5)
(4)
(3) (4)
(5)

Appendix G – Railway Vehicle Dynamics
446
(a) Influence of two point forces at a distance 2l apart on node i
(b) Influence of two point forces at a distance 1.5l apart on node i
(c) Influence of two point forces at a distance l apart on node i
(d) Influence of two point forces at a distance 0.5l apart on node i
Figure G.6: Time domain of the two moving forces using the exact model with
overlapping time functions
P
P
(1) P1 arrives on node i-1; (2) P1 arrives on node i; (3) P1 arrives on node i+1
(4) Q1 arrives on node i-1; (5) Q1 arrives on node i; (6) Q1 arrives on node i+1
( )1
( )2
( )3 ( )6( )4
( )5
( )1
( )2
( )3 ( )6
( )4
( )5
( )1
( )2
( )3 ( )6( )4
( )5
( )4
( )3( )2
( )6
( )1
( )5
( )1
( )2
( )3 ( )6( )4
( )5P
P
t
( )4
( )3( )2
( )6
( )1
( )5
( )4
( )3( )2
( )6
( )1
( )5
t
t
t
( )6
( )1 t
t
t
t
P
P M
M
M
M

Appendix G – Railway Vehicle Dynamics
447
G.5 Vehicle dimensions and parameters
As shown in Figure G.7, each vehicle consists of a vehicle body supported by a pair
of bogies, with each bogie supported by axles. Finally a pair of wheels supports each
axle. The bogies are connected to the axles through primary suspensions and to the
vehicle body through secondary suspensions, with each suspension consisting of a
spring and dashpot. In the two-dimensional models, one assumes that the weight of all
components is halved.
secondary suspension
primary suspension
Hertian spring
vehicle body
bogie
wheelset
vehicle body
bogie
Side View
bogie
Front View
wheels wheels
secondary suspension
primary suspension
Hertian spring
vehicle body
bogie
wheelset
vehicle body
bogie
Side View
bogie
Front View
wheels wheels
Figure G.7: Three-dimensional railway carriage model (a) descriptive; (b) using
symbolization
(a)
2 yk 2 y
c
1yk 1y
k
2 yk
1yc
1yc
2 yc
HkH
kw
Mw
Mw
Mw
M
,v zzv
M I
,b zzb
M I
(b)
,b zzb
M I
,v xxv
M I
bM
y
x
1 1,z z
k c
1 1,y y
k c
1 1,z z
k c
1 1,y y
k c
Front View
Side View
4wA
3wA 2w
A1w
Aw
b
vb
wB
y
z
vl
0h
1h
3h

Appendix G – Railway Vehicle Dynamics
448
The total mass of each wheel, bogie frame and vehicle body is denoted by the
symbols Mw, Mb and Mv. The primary spring stiffness and damping is given by k1 and
c1, while k2 and c2 denote the secondary spring stiffness and damping. The Hertzian
spring stiffness, also known as the wheel-rail contact stiffness, is given by kH.
Longitudinal and lateral springs are required between the vehicle body and the bogie
and also between the bogie and axles to prevent the structure from becoming a
mechanism. These horizontal springs are independent from the main suspension
springs.
Each wheel of the train is modelled using lumped masses, while elastic beam
elements are used to model the bogie frame and vehicle body. The primary and
secondary suspensions are then modelled using spring elements. The author’s six-axle
201 Class locomotive and four-axle Mark3 railway coach modelled in ANSYS can be
seen in Figure G.8.
Figure G.8: Six-axle 201 Class locomotive and four-axle Mark3 railway coach
modelled using beam, spring and lumped mass elements in ANSYS
(Bowe and Mullarkey, 2005)
V1
W1 – First wheel of the train (node)
W7 – Seventh wheel of the train (node)
V1 – Vehicle body of the locomotive (node)
V2 – Vehicle body of the railway coach (node) V2
W1
W7

Appendix G – Railway Vehicle Dynamics
449
The author indicates in Figure G.8, in particular, the 1st (W1) and 7
th (W7) wheel of
the train, one is the front wheel of the locomotive and the other is the front wheel of
the first railway coach. The nodes V1 and V2 on the vehicle bodies of the locomotive
and railway coach, respectively, are also shown. These nodes are examined in the
results.
A list of vehicle properties and dimensions for both the Class 201 locomotive and
Mark3 railway coach adopted in this study are presented in Table G.1. The symbol X
marked in the left hand column indicates that this particular value is not used or
required in the two-dimensional vehicle model.
Table G.1: Vehicle dimensions and parameters
Data Symbols Unit Loco 201 MK3
coach
Mass properties
Mass of vehicle body Mv t 64.48 35.74
x Roll inertia of vehicle body Ixxv tm2 123.0 68.2
x Yaw inertia of vehicle body Iyyv tm2 2008 1287
Pitch inertia of vehicle body Izzv tm2 2002 1284
Mass of bogie frame Mb t 10.18 3.15
x Roll inertia of bogie frame Ixxb tm2 10.18 3.15
x Yaw inertia of bogie frame Iyyb tm2 21.73 4.91
Pitch inertia of bogie frame Izzb tm2 11.55 1.76
Mass of wheel Mw t 4.52 1.50
Roll inertia of wheel Ixxw tm2 4.52 1.50
Suspension stiffness
Primary suspension in the longitudinal direction k1x kN/m 4240 20260
Secondary suspension in the longitudinal direction k2x kN/m 320 422
Primary suspension in the vertical direction k1y kN/m 1470 3185
Secondary suspension in the vertical direction k2y kN/m 630 566
x Primary suspension in the lateral direction k1z kN/m 2120 10130
x Secondary suspension in the lateral direction k2z kN/m 160 211
Suspension damping
Primary suspension in the longitudinal direction c1x kNs/m 1.00 0.000
Secondary suspension in the longitudinal direction c2x kNs/m 32.00 41.44
Primary suspension in the vertical direction c1y kNs/m 4.00 32.41
Secondary suspension in the vertical direction c2y kNs/m 20.00 26.24
x Primary suspension in the lateral direction c1z kNs/m 1.00 0.00
x Secondary suspension in the lateral direction c2z kNs/m 32.00 41.44

Appendix G – Railway Vehicle Dynamics
450
Dimension - longitudinal direction - x
1st axle to c.o.g. of bogie frame Aw1 m 1.689 1.300
2nd axle to c.o.g. of bogie frame Aw2 m 0.000 1.300
3rd axle to c.o.g. of bogie frame Aw3 m 2.019 1.300
4th axle to c.o.g. of bogie frame Aw4 m 1.689 1.300
5th axle to c.o.g. of bogie frame Aw5 m 0.000 -
6th axle to c.o.g. of bogie frame Aw6 m 2.019 -
Rear axle of a vehicle to front axle of next vehicle Cw m 4.169 4.400
Front bogie frame c.o.g. to c.o.g. of rear bogie frame Bw m 13.405 16.000
Half of bogie frame to c.o.g. of vehicle body lbg m 6.703 8.000
Overall length of vehicle body lv m 19.113 20.600
Dimension - vertical direction - y
Height from rail to wheel centre h0 m 0.508 0.460
Height from rail to c.o.g of bogie h1 m 0.843 0.600
Height from rail to secondary suspension h2 m 0.843 0.600
Height from rail to c.o.g. of vehicle body h3 m 1.393 0.220
Overall height of vehicle body hv m 2.200 2.200
Dimension - lateral direction - z
x Gauge width of wheelset bw m 1.500 1.500
x Overall width of vehicle body bv m 2.000 2.000
Vehicles components such as the bogies and vehicle body are represented by elastic
beam elements within the ANSYS finite element program, as this system is easy
implemented. However, this technique required the author to pre-calculate the centre
of gravity of each component and its mass moment of inertia. Additionally, these
values can change if the geometry, dimensions or number of elements in the model is
altered. This is illustrated in the following example, where the centre of gravity and
mass moments of inertia (roll, yaw and pitch) of the vehicle body of the Class 201
locomotive is computed. A three-dimensional representation of the locomotive
modelled in ANSYS using beam elements can be seen in Figure G.9. It should be
noted in this particular example that the author has assumed that the vertical and
lateral beam elements are insignificant compared with the longitudinal beams; hence
are omitted in the calculations. Additionally, one assumes that the bottom beam
contribute 75% of the total mass of the vehicle body, while the top beam only
contribute 25%.

Appendix G – Railway Vehicle Dynamics
451
Figure G.9: Three-dimensional locomotive in ANSYS using beam elements
Next, the author isolates the vehicle body of the locomotive, which is shown in Figure
G.10. Examining this diagram, the reader can see that the vehicle body comprises
eight beam elements; six beam elements on the bottom surfaces, while only two beam
elements on the top surface, numbered from 1 to 8 as indicated (model A).
Figure G.10: Isolated vehicle body modelled using 8 beam elements (model A)
Due to symmetry, the centre of gravity in the longitudinal and lateral direction of the
vehicle body is located at a distance of 9.5565 m and 1.000 m from the origin,
respectively. However, in order to calculate the centre of gravity of the vehicle body
in the vertical direction, the author must use the following equation (ANSYS, 2002):
1
N
c vi vi v
i
Y m y M=
=∑ (G.1)

Appendix G – Railway Vehicle Dynamics
452
where area density lengthvi
m = × × of the i-th beam element, Mv is the total mass of
the vehicle body and vi
y is the distance from neutral axis of the beam element to the
origin of the vehicle body i.e. the intersection of the x, y and z-axis. With the aid of
Table G.1 and Figure G.10, the author computes the vertical centre of gravity of the
vehicle body as follows:
1 1 2 2 3 3 8 8 . . . +c v v v v v v v v v
Y m y m y m y m y M= + + +
( ) ( ) ( ) ( ) 3.402 0 17.376 0 3.402 0 +8.06 2.2 2 64.48= + + ×
35.464 64.48 0.550 m= =
Using the three centres of gravity of the vehicle body i.e. 9.5565 m, 0.550 m and
1.000 m in the longitudinal, vertical and lateral directions, respectively, one now
calculates the three equivalent mass moments of inertia (roll, yaw and pitch) for the
vehicle body using the following equations (ANSYS, 2002):
( ) ( )2 2
1
N
xx vi vi vi
i
I m y z=
= + ∑ (rolling inertia) (G.2a)
( ) ( )2 2
1
N
yy vi vi vi
i
I m x z=
= + ∑ (yawing inertia) (G.2b)
( ) ( )2 2
1
N
zz vi vi vi
i
I m x y=
= + ∑ (pitching inertia) (G.2c)
where vi
x , vi
y and vi
z is the distance from the neutral axis of the beam element at its
own local centre of gravity to the centre of gravity of the vehicle body. With the aid of
Figure G.10 and Equation (G.2), the mass moments of inertia of the vehicle body are
calculated as follows:

Appendix G – Railway Vehicle Dynamics
453
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( )
2 2 2 2 2 2
1 1 1 2 2 2 8 8 8
2 2 2 2 2 2
2 2
2
. . . +
3.402 0.55 1.00 17.376 0.55 1 3.402 0.55 1.00
+8.06 1.65 1.00 2
4.431+22.632+4.431+30.003 2 123.0 tm
xx v v v v v v v v vI m y z m y z m y z = + + + + +
= + + + + +
+ ×
= × =
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( )
2 2 2 2 2 2
1 1 1 2 2 2 8 8 8
2 2 2 2 2
2
2
. . . +
3.402 8.212 1.00 17.376 0 1.00 3.402 8.212 1.00
+8.06 0 1.00 2
232.822+17.376+232.822+8.060 2 982.2 tm
yy v v v v v v v v vI m x z m x z m x z = + + + + +
= + + + + +
+ ×
= × =
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( )
2 2 2 2 2 2
1 1 1 2 2 2 8 8 8
2 2 2 2 2
2
2
. . . +
3.402 8.212 0.55 17.376 0 0.55 3.402 8.212 0.55
+8.06 0 1.65 2
230.450+5.256+230.450+21.943 2 976.2 tm
zz v v v v v v v v vI m x y m x y m x y = + + + + +
= + + + + +
+ ×
= × =
However, it should also be noted that these above values are dependent on the
quantity and positioning of beam elements in the locomotive model shown in Figure
G.10. Supposing the bottom surface of the vehicle body is now discretized into four
beam elements instead of three, such that the middle element is divided into two
smaller elements as shown in Figure G.11, then the three equivalent mass moments of
inertia using Equation (G.2) are equal to:
2123.0 tmxx
I = (model B shown in Figure G.11)
21391.9 tmyyI = (model B shown in Figure G.11)
21385.9 tmzz
I = (model B shown in Figure G.11)

Appendix G – Railway Vehicle Dynamics
454
In a similar manner, if the vehicle body is also discretized into several beam elements
i.e. ten elements on the top and bottom surface, then the equivalent mass moment of
inertia will again change to the following values:
2123.0 tmxx
I = (model C shown in Figure G.12)
22002 tmyyI = (model C shown in Figure G.12)
22005 tmzz
I = (model C shown in Figure G.12)
Figure G.11: Isolated vehicle body modelled using 10 beam elements (model B)
Figure G.12: Isolated vehicle body modelled using 40 beam elements (model C)

Appendix G – Railway Vehicle Dynamics
455
Beyond ten beam elements used to simulate the vehicle body, the additional increase
in the mass moment of the inertia of the vehicle body becomes less significant.
Thus far, it has been shown that the equivalent mass moment of inertia of the vehicle
body tends to increase as the number of beam elements in the model increases.
However, in the following example it will be shown that this additional mass moment
of inertia in the three different simulation i.e. model A, B and C has little or no effect
on the finite element solution. The reasoning been is that the mass matrix of the beam
element tends to distribute the mass to both ends of the beam whereas the equivalent
mass moment of inertia tends to assume that the mass is located at the centre of
gravity of the beam. Therefore, one can confidently simulate the vehicle body with
fewer beam elements in the finite element solution, while still achieving the same
equivalent mass moment of inertia of a vehicle body with many beam elements.
By assuming the three different vehicle bodies i.e. model A, B and C are supported by
vertical, longitudinal and lateral suspension springs located at its free ends along the
bottom surface and that massless beam elements support the top surface beams as
shown in Figure G.9, the author is now in a position to conduct a transient analysis on
each vehicle body. Firstly, one examines the effects of releasing the vehicle body
from its unsettled static position such that it will undergo free-vibration in the
transient analysis, while secondly an additional rotational displacements (about the x-
axis and z-axis) are added to the vehicle body in the static analysis; thus, causing the
vehicle body to pitch and roll as well as free-vibrate in the transient analysis.
The vertical displacement of each of the vehicle bodies undergoing free vibration only
is presented G.13. It can be seen from the results that the different mass moment of

Appendix G – Railway Vehicle Dynamics
456
inertia of the vehicle body has little or effect on the vertical displacement of the
vehicle body under free-vibration. Next, the author presents the rolling and pitching
motion of the three different vehicle bodies, respectively, in Figure G.14. Again, the
reader can see that the vehicle body simulated by beam elements, which can have
different mass moments of inertia, has little or no effect in the finite element solution.
Therefore, the equivalent mass moment of inertia has little or no dynamic effect when
one models the vehicle body and bogies using beam elements in the finite element
solution.
-0.20
-0.15
-0.10
-0.05
0.00
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Time (sec)
Ve
rtic
al D
isp
lac
em
en
t (m
)
Model A Model B Model C
Figure G.13: Vertical displacement of the vehicle body as a function of time
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
0.08
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Time (sec)
Ro
llin
g D
isp
lac
em
en
t (r
ad
)
Model A Model B Model C
(a)

Appendix G – Railway Vehicle Dynamics
457
-0.010
-0.008
-0.005
-0.003
0.000
0.003
0.005
0.008
0.010
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Time (sec)
Pit
ch
ing
Dis
pla
ce
me
nt
(ra
d)
Model A Model B Model C
Figure G.14: (a) Rolling; (b) pitching motion of vehicle body as a function of time
using the three different mass moments of inertia for the vehicle body
It should be noted that the centre of gravity of the bogie and wheels as well as its mass
moment of inertia are computed in a similar manner.
G.6 Modal analysis of the railway vehicles
Table G.2 presents results obtained from a modal analysis of the 201 Class
locomotive and Mark3 railway coach. The different mode shapes of the railway
vehicles are then shown in Figure G.15.
Table G.2: Modal analysis of vehicle body of the 201 Class locomotive and Mark3
railway coach used extensively throughout this thesis
Mode Frequency (Hz)
201 Loco (V1) MK3 Coach (V2)
Rolling 1.917 2.003
Bouncing 5.433 6.255
Pitching 5.968 7.129
Yawing 54.469 51.761
(b)

Appendix G – Railway Vehicle Dynamics
458
Figure G.15: Six modes that the railway vehicle can experience as it travels along
the rail (a) longitudinal oscillation; (b) bouncing; (c) lateral
oscillation; (d) rolling; (e) yawing; (f) pitching (Iwnicki, 2006)
G.7 Braking and accelerating effects of a train
In Section 4.4.4, the train experiences acceleration; thus, the speed of the train is no
longer constant. The mathematical formula used to compute the change in speed and
the positions of any wheel at any time t are derived in this sub-section. One begins
with a linear acceleration defined by:
( )( )
2
2
d X tX t Bt D
dt= = +&& (G.3)
y
x
y
z
Longitudinal oscillation Rolling
x
y
x
z
Yawing Bouncing
x
z
Lateral oscillation
x
y
Pitching
(c)
(a)
(b) (e)
(f)
(d)

Appendix G – Railway Vehicle Dynamics
459
where ( )X t and ( )X t&& are the displacement and acceleration of the front wheel of the
train at time t, and B and D are unknown constants. At time 0,t = on finds that
Equation (G.3) reduces to:
( ) ( )0 0X B D= +&&
( )0X D=&& (G.4)
Substituting Equation (G.4) back into (G.3) and solving for B gives:
( ) ( )0X t Bt X= +&& && (G.5a)
( ) ( )0X t XB
t
−=
&& &&
(G.5b)
Integrating Equation (G.3), one finds the velocity of wheel at time t equal to:
( )( )
0 0
2
2
t t
t t
d X tdt Bt D dt
dt= +∫ ∫ (G.6a)
( )
00
2 2
2 2
t t
tt
d X t BtDt
dt
= +
(G.6b)
( ) ( ) 220 0
02 2
dX t dX t BtBtDt Dt
dt dt
− = + − −
(G.6c)
( ) ( ) 220 0
02 2
dX t dX t BtBtDt Dt
dt dt= + + − − (G.6d)
where 0t is the initial time.

Appendix G – Railway Vehicle Dynamics
460
Integrating Equation (G.6d), one finds the displacement of wheel at time t equal to:
( ) ( )
0 0
220 0
02 2
t t
t t
dX t dX t BtBtdt Dt Dt dt
dt dt
= + + − −
∫ ∫ (G.7a)
( )( )
0
0
23 20 0
06 2 2
t
t
t
t
dX t Bt tBt DtX t t Dt t
dt
= + + − −
(G.7b)
( ) ( )( ) 23 2
0 00 0
6 2 2
dX t Bt tBt DtX t X t t Dt t
dt
− = + + − −
( ) 3 2 30 20 0 0
0 06 2 2
dX t Bt Dt Btt Dt
dt
− − − + +
(G.7c)
( ) ( )( ) 23 2
0 00 0
6 2 2
dX t Bt tBt DtX t X t t Dt t
dt= + + + − −
( ) 3 2 30 20 0 0
0 06 2 2
dX t Bt Dt Btt Dt
dt− − − + + (G.7d)
If one assumes that time 0 0t = and that the acceleration remains constant, 0B = , then
Equations (G.6d) can be rewritten as follows:
( ) ( ) ( )( )
0 00
dX t dX dXDt X t
dt dt dt= + = + && (G.8a)
or
( ) ( ) ( )0 0X t X X t= +& & && (G.8b)
Equally, if 0 0t = and 0B = , Equation (G.7d) can be rewritten as follows:
( ) ( )( )
( )( ) ( ) 220 0 0
0 02 2
dX dX X tDtX t X t X t
dt dt= + + = + +
&&
(G.9a)
or
( ) ( ) ( ) ( ) 210 0 0
2X t X X t X t= + +& && (G.9b)

Appendix G – Railway Vehicle Dynamics
461
With a change of notation in Equation (G.8b) and (G.9b), one can write the velocity
and displacement of the front wheel of the train as follows:
( )X t c at= +& (G.10a)
( ) ( ) 210
2X t X ct at= + + (G.10b)
If one assumes that the front wheel of the train is at the left support of the bridge at
time 0t = , then Equation (G.10b) can be rewritten as follows:
( ) 21
2X t ct at= + (G.10c)
Using Equation (G.10c) and (3.39), the position of the m-th wheel, of the k-th bogie,
and the j-th carriage of the train is then equal to:
( ) ( ) ( ) ( )2
, ,
11 1 1
2w w wm j k
X t ct at D j B k A m= + − − − − − − (G.11)
As an example, a train is assumed to have an initial speed c of 45.55 m/s (164 km/hr)
at time t = 0 sec and the moment the front wheel enters the Boyne Viaduct Railway
Bridge, it begins to decelerate at a = -2.075 m/s2, so that the train comes to a complete
stop after 500 m. Using Equation (G.10c), one is first able to compute the time when
the front wheel arrives at a certain position on the bridge, while Equation (G.10a) is
then used to compute the train speed at that particular time. In Table G.3, the author
selects different positions along the bridge and computes the time and velocity of the
front wheel at these locations. Assuming the train consists of a single 201 Class

Appendix G – Railway Vehicle Dynamics
462
locomotive and three Mark3 railway coaches, then according to Section G.2, the
distance from the front wheel to the rear wheel of the train is 85.882 m; thus, the front
wheel of the train would have to travel 80.77 85.88 166.65 m+ = before the rear wheel
of the train reaches the right hand support of the bridge.
Table G.3: Wheel position and velocity of a train as it decelerates along Boyne Bridge
Train decelerates from 45.55 m/s to 0 m/s over 500 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 45.550 Front wheel of train at LHS
0.905 40.385 43.672 Front wheel of train at mid-span
1.851 80.769 41.709 Front wheel of train at RHS
4.028 166.650 37.192 Rear wheel of train at RHS
As a second example, the train is now assumed to be stationary with the front wheel
of the train at the left-hand support at time t = 0 sec. The train then accelerates
constantly at a = 2.075 m/s2, so that it reaches a speed of 45.55 m/s (164 km/hr) after
500 m. Using the same formulae as before, the author computes the time it takes for
the front wheel of the train to reach a specific location on the bridge as well as the
velocity of the train at that particular time as presented in Table G.4
Table G.4: Wheel position and velocity of a train as it accelerates along Boyne Bridge
Train accelerates from 0 m/s to 45.55 m/s over 500 m
Time X(t) Vel(t) Comments
(s) (m) (m/s)
0.000 0.000 0.000 Front wheel of train at LHS
6.239 40.385 12.945 Front wheel of train at mid-span
8.824 80.770 18.307 Front wheel of train at RHS
12.674 166.650 26.297 Rear wheel of train at RHS

References
463
References
Akin J.E. and Mofid, F. (1989), Numerical solution for response of beam with moving
mass, Journal of Structural Engineering, Vol. 115 (1): pp. 120-131.
ANSYS (2002), ANSYS 6.1 Documentation, Canonsburg, Pensylvania, USA.
Au, F.T.K., Wang, J.J. and Cheung, Y.K. (2002), Impact study of cable-stayed
railway bridges with random rail irregularities, Engineering Structures, Vol. 24: pp.
529–541.
Bathe, K.J. (1996), Finite element procedures, Prentice-Hall, Englewood Cliffs, New
Jersey, USA.
Biggs, J. M., Suer, H. S., and Louw, J. M., (1959), Vibration of Simple Span Highway
Bridges, Transaction of the American Society of Civil Engineers, Vol. 124 (2979): pp.
291-318.
Biggs, J.M. (1964), Introduction to structural dynamics, MsGraw-Hill Book
Company, New York, USA.
Bogacz, R. and Kowalska, Z. (2001), Computer simulation of the interaction between
a wheel and a corrugated rail, European Journal of Mechanics and Solids, Vol. 20:
pp. 673–684.

References
464
Bowe, C.J. and Mullarkey, T.P. (2000), Verification of contact elements by triangular
force technique, Symposium on Trends in the Application of Mathematics to
Mechanics 2000, Elsevier, pp. 42-49, National University of Ireland, Galway.
Bowe, C.J. and Mullarkey, T.P (2002), Train-railway interaction incorporating
irregularities, ANSYS/ICEM UK Conference 2002, Warwick.
Bowe, C.J. and Mullarkey, T.P. (2005), Wheel-rail contact elements incorporating
irregularities, Advances in Engineering Software, Vol. 36 (11-12): pp. 827-837.
Bowe, C.J. and Mullarkey, T.P (2008), Unsprung wheel-rail interactions using a
modal method and finite element method, Advances in Engineering Software, Vol. 39:
pp. 911-922.
Cai, Y., Chen, S.S., Rote, D.M. and Coffey, H.T. (1994), Vehicle/Guideway
interaction for high speed vehicles on a flexible guideway, Journal of Sound and
Vibration, Vol. 175 (5): pp. 625-646.
Chang, T.P. and Liu, Y.N. (1996), Dynamic finite element analysis of a nonlinear
beam subjected to a moving load, International Journal for Solid & Structures, Vol. 33
(12): pp. 1673-1688.
Chatterjee, P.K., Datta, T.K. and Surana, C.S. (1994), Vibration of continous bridge
under moving vehicles, Journal of Sound and Vibration, Vol. 169 (5): pp. 619-632.
Cheng, Y.S., Au, F.T.K. and Cheung, Y.K. (2001), Vibration of railway bridges
under a moving train by using bridgetrack-vehicle element, Engineering Structures,
Vol. 23: pp. 1597–1606.
Cheung, Y.K., Au, F.T.K., Zheng, D.Y. and Cheng, Y.S. (1999), Vibration of multi-
span non uniform bridges under moving vehicles and trains using modified beam
vibration functions, Journal of Sound and Vibration, Vol. 228 (3): pp. 611-628.

References
465
Chu, K., Dhar, C.L. and Garg, V.K. (1979), Railway-bridge impact: simplified train
and bridge model, Journal of the Structural Division, Vol. 105 (9), pp. 1823-1844.
Chu, K. H., Garg, V.K. and Bhatti, M.H. (1985), Impact in truss bridge due to freight
trains, ASCE Journal of Engineering Mechanics, Vol. 111 (2): pp. 159-174.
Chiu, T.W. (1995), Prediction of the aerodynamic loads on a railway train in a cross-
wind at large yaw angles using an integrated two- and three-dimensional
source/vortex panel method, Journal of Wind Engineering and Industrial
Aerodynamics, Vol. 57: pp. 19-39.
Coates, R.C., Coutie, M.G. and Kong, F.K. (1997), Structural analysis, Chapman &
Hall, London, UK.
Delgado, R.M. and Santos, S.M. dos (1997), Modelling of railway bridge-vehicle
interaction on high speed tracks, Computers & Structures, Vol. 63 (3): pp. 511-523.
Esveld, C. (1989), Modern railway track, MRT-Productions, Duisburg, Germany.
Esveld, C. (2001), Modern railway track, MRT-Productions, Zaltbommel.
Deng, L and Cai, C.S. (2009) Identification of parameters of vehicles moving on
bridges, Engineering Structures, [article in press].
Ermopoulos, J. and Spyrakos, C.C. (2006), Validated analysis and strengthening of a
19th century railway bridge, Engineering Structures, Vol. 28 (5): pp. 783-792.
Fenner, R.T. (1996), Finite Element Methods for Engineers, Imperial College Press,
London, UK.
Fish, B. and Belytschko, T. (2007), A First Course in Finite Elements, John Wiley &
Sons Ltd, 1st Edition, The Atrium, Southern Gate, Chichester, UK.
Frýba, L. (1996), Dynamics of railway bridges, Thomas Telford, London, UK.

References
466
Frýba, L. (1999), Vibration of solids and structures under moving loads, Thomas
Telford, London, UK.
Fryba, L. (2001), A rough assessment of railway bridges for high speed trains,
Engineering Structures 23, Vol. 23: pp. 548–556.
Gbadeyan, J.A. and Oni, S.T. (1995), Dynamic behaviour of beams and rectangular
plates under moving loads, Journal of Sound and Vibration, Vol. 182 (5): pp. 677-
695.
Gallagher, R. (2002), Structural analysis of the Boyne railway viaduct, Msc Thesis,
Department of Civil Engineering, Trinity College, Dublin, Ireland.
Garg, V.K. and Dukkipati, R.V. (1984), Dynamics of railway vehicle systems,
Academic Press, New York, USA.
Garinei, A. and Risitano, G. (2008), Vibrations of railway bridges for high speed
trains under moving loads varying in time, Engineering Structures, Vol. 30: pp. 724–
732.
Greco, A. and Santini, A. (2002) Dynamic response of a flexural non-classically
damped continuous beam under moving loadings, Computers and Structures, Vol. 80:
pp. 1945–1953.
Green, M.F. and Cebon, D. (1994), Dynamic response of highway bridges to heavy
vehcile loads: theory and experimental validation, Journal of Sound and Vibration,
Vol. 170 (1): pp. 51-78.
Green, M.F. and Cebon, D. (1997), Dynamic interaction between heavy vehicles and
highway bridges, Computers & Structures, Vol. 62 (2): pp. 253-264.
Hambly, E.C. (1991) Bridge Deck Behaviour, Spons Architecture Price Book, 2nd
Edition,

References
467
Howden (1930), Reconstruction of the Boyne viaduct, Drogheda, Transactions of the
Institution of Civil Engineering of Ireland, Ireland
Hutton, D.V. (2004), Fundamental of finite Element Analysis, McGraw-Hill, 1st
Edition, New York, USA.
Ichikawa, M., Miyakawa, Y. and Matsuda, A. (2000), Vibration analysis of the
continuous beam subjected to a moving mass, Journal of Sound and Vibration, Vol.
230 (3): pp. 493-506.
Inbanathan, M. and Wieland, M. (1987), Bridge Vibrations due to Vehicle Moving
over Rough Surface, Journal of Structural Engineering, Vol. 113 (9). pp. 1994-2008.
Inglis, C. E. (1934), A mathematical treatise on vibrations in railway bridges,
Cambridge University Press, London, UK.
Iwnicki, S. E (1999), The Manchester Benchmarks for rail vehicle simulation, Swets
& Zeitlinger, Lisse, The Netherlands.
Iwnicki, S. E (2006), Handbook of Railway Vehicle Dynamics, CRC Press, 1st Edition,
Manchester Metropolitan University, UK.
ISO 8606: (1995, E). Mechanical vibration - road surface profiles - reporting of
measured data.
Ju, S.H. and Lin, H.T. (2003), Numerical investigation of a steel arch bridge and
interaction with high-speed trains, Engineering Structures, Vol. 25: pp. 241–250.
Kwon, H.C., Kim, M.C. and Lee, I.W. (1998), Vibration control of bridges under
moving loads, Computers & Structures, Vol. 66: pp. 473-480.
Lee, H.P (1998), Dynamic response of a Timoshenko beam on a Winkler foundation
subjed to a moving mass, Applied Acoustics, Vol. 55 (3): pp. 203-215.

References
468
Li, J.Z. and Su, M.B. (1999), The resonant vibration for a simply supported girder
bridge under high-speed trains, Journal of Sound and Vibration, Vol. 224: pp.897–
915.
Liu, X.W., Xie, J., Wu, C. and Huang, X.C. (2008), Semi-analytical solution of
vehicle–bridge interaction on transient jump of wheel, Engineering Structures, Vol.
30: pp. 2401–2412.
Majka, M., Hartnett, M., and O’Dwyer, D. (2002), The influence of Hertzian spring
stiffness on the dynamic response of a bridge model, Proceedings of the Sixth
International Conference on Computational Structures Technology, September 04-06,
pp.339-340.
Majka, M. (2006), Dynamic response of railway bridges: Analysis of bridge - train
Interaction using numerical modelling and experimental techniques, PhD Thesis,
Department of Civil Engineering, National University of Ireland, Galway, Ireland.
Majka, M. and Hartnett, M. (2008), Effects of speed, load and damping on the
dynamic response of railway bridges and vehicles, Computers and Structures, Vol. 86
(6): pp. 556-572
Museros, P., Romero, M. L., Poy, A. and Alarcon, E. (2002), Advances in the analysis
of short span railway bridges for high-speed lines, Computers and Structures, Vol.
80: pp. 2121–2132.
Olsson, M. (1985), Finite element, modal co-ordinate analysis of structures subjected
to moving loads, Journal of Sound and Vibration, Vol. 9: pp. 1-12.
Raghunathan, R.S., Kim, H.D. and T.Setoguchi (2002), Aerodynamics of high-speed
railway train, Progress in Aerospace Sciences, Vol. 38: pp. 469–514.
Rieker, J.R., Lin, Y.H. and Trethewey, M.W. (1996), Discretization considerations in
moving load finite element beam models, Finite Elements in Analysis and Design,
Vol. 21: pp. 129-144.

References
469
Schwab, A. L. and Meijaard, J. P. (2002), Two Special Finite Elements for Modelling
Rolling Contact in a Multibody Environment, Proceedings of ACMD’02 - The First
Asian Conference on Multibody Dynamics 2002, July 31 – August 2, 2002, Iwaki,
Fukushima, Japan.
Savin, E. (2001). Dynamic amplification factor and response spectrum for the
evaluation of vibrations of beams under successive moving loads, Journal of Sound
and Vibration, Vol. 248: pp. 267-288.
Sun, Y.Q. and Dhanasekar, M. (2002), A dynamic model for the vertical interaction of
the rail track and wagon system, International Journal of Solids and Structures, Vol.
39: pp. 1337–1359.
Tung, T.P., Goodman, L.E., Chen, T.Y. and Newmark, N.M. (1956) Highway-Bridge
Impact Problems, Highway Research Board Bull, No. 124: pp. 111-134.
Wang, J.F., Lin, C.C. and Chen, B.L. (2003), Vibration suppression for high-speed
railway bridges using tuned mass dampers, International Journal of Solids and
Structures, Vol. 40: pp. 465–491.
Wang, Y.M. (1998), The dynamical analysis of a finite inextensible beam with an
attached accelerating mass, International Journal for Solid & Structures, Vol. 35 (9-
10): pp. 831-854.
Wikipedia (2007) http://en.wikipedia.org/wiki/IE_201_Class
Wikipedia (2010) http://en.wikipedia.org/wiki/Emergency_brake_%28train%29
Wiriyachai, A., Chu, K. H. and Garg, V. K. (1982), Bridge impact due to wheel and
track irregularities, ASCE Journal of the Engineering Mechanics Division, Vol. 108
(4): pp. 648-666.
Wu, J.J, Whittaker, A.R. and Cartmell, M.P. (2000), The use of finite element
techniques for calculating the dynamic response of structures to moving loads,
Computers and Structures, Vol. 78: pp. 789-799.

References
470
Wu, T.X. and Thompson, D.J. (2004), On the parametric excitation of the wheel/track
system, Journal of Sound and Vibration, Vol. 278: pp. 725–747.
Wu, Y.S. and Yang, Y.B. (2003), Steady-state response and riding comfort of trains
moving over a series of simply supported bridges, Engineering Structures, Vol. 25:
pp. 251–265.
Xia, H., Xu, Y.L. and Chan, T.H.T. (2000), Dynamic interaction of long suspension
bridges with running trains, Journal of Sound and Vibration, Vol. 237 (2): pp. 263-
280.
Xia, H. and Zhang, N. (2005), Dynamic analysis of railway bridge under high-speed
trains, Computers and Structures, Vol. 83: pp.1891–1901.
Xia, H., Zhang, H. and Guo, W.W (2006), Analysis of resonance mechanism and
conditions of train–bridge system, Journal of Sound and Vibration, Vol. 297: pp. 810–
822.
Xu, Y.L. and Ding, Q.S. (2006), Interaction of railway vehicles with track in cross-
winds, Journal of Fluids and Structures, Vol. 22: pp. 295–314.
Yang, Y.B., Yau, J.D. and Hsu, L.C. (1997), Vibration of simple beams due to trains
moving at high speeds, Engineering Structures, Vol. 19 (11): pp. 936-944.
Yang, Y.B. and Wu, Y.S. (2001), A versatile element for analyzing vehicle–bridge
interaction response, Engineering Structures, Vol. 23: pp. 452–469.
Yang, Y. B, Yau, J. D. and Wu, Y. S. (2004), Vehicle-Bridge Interaction Dynamics -
With Applications to High Speed Railways, World Scientific, New Jersey, USA.
Yang, Y.B., Lin, C.W. and Yau, J.D. (2004), Extracting bridge frequencies from the
dynamic response of a passing vehicle, Journal of Sound and Vibration, Vol. 272: pp.
471–493.

References
471
Yang, Y.B., and Lin, C.W. (2005), Vehicle–bridge interaction dynamics and potential
applications, Journal of Sound and Vibration, Vol. 284: pp. 205–226.
Yau, J.D., Yang, Y.B. and Kuo, S.R. (1999), Impact response of high speed rail
bridges and riding comfort of rail cars, Engineering Structures, Vol. 21: pp. 836–844.
Yau, J. D., Wu, Y. S., and Yang, Y. B. (2001). Impact response of bridges with elastic
bearings to moving loads, Journal of Sound and Vibration, Vol. 248(1): pp.9–30.
Yau, J.D. and Yang, Y.B. (2004), Vibration reduction for cable-stayed bridges
travelled by high-speed trains, Finite Elements in Analysis and Design, Vol. 40: pp.
341–359.
Yau, J.D. and Yang, Y.B. (2006), Vertical accelerations of simple beams due to
successive loads traveling at resonant speeds, Journal of Sound and Vibration, Vol.
289: pp. 210–228.
Zhai, W. and Cai, Z. (1997), Dynamic interaction between a lumped mass vehicle and
a discretely supported continuous rail track, Computers & Structures Vol. 63, No. 5,
pp. 981497, 1991, Vol. 63 (5): pp. 987-997.
Zhang, Q.L., Vrouwenvelder, A. and Wardenier, J. (2001), Numerical simulation of
train-bridge interaction dynamics, Computers & Structures, Vol. 79: pp. 1059-1075.
Zhang, N., Xia, H. and Guo, W. (2008) Vehicle–bridge interaction analysis under
high-speed trains, Journal of Sound and Vibration, Vol. 309: pp. 407–425.
Zhai, W.M., Wang, Q.C., Lu, Z.W. and Wu, X.S. (2001), Dynamic effects of vehicles
on tracks in the case of raising train speeds, Proceedings of the Institution of
Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, Vol. 215 (2): pp.
125-135.
Zienkiewicz, O.C. and Taylor, R.L (2000), The Finite Element Method: The Basis,
Butterworth-Heinemann, Fifth Edition, Oxford, UK.

Bibliography
472
Bibliography
Ahmed, T.U., Ramachandra, L.S. and Bhattacharyya, S.K. (2001), Elasto-plastic
response of free-free beams subjected to impact loads, International Journal of Impact
Engineering, Vol. 25 (2): pp. 661-681.
Au, F.T.K., Jiang, R.J. and Cheung, Y.K. (2004), Parameter identification of vehicles
moving on continuous bridges, Journal of Sound and Vibration, Vol. 269: pp. 91–111.
Beards, C.E. (1996), Structural Vibration: Analysis and Damping, John Wiley &Sons
Inc., New York, USA..
Brebbia, C. A. and Walker, S. (1979), Dynamic analysis of offshore structures,
Newnes-Butterworths, London, UK.
Chatterjee, P.K and Datta, T.K. (1995), Dynamic analysis of arch bridges under
travelling loads, International Journal for Solid & Structures, Vol. 32 (11): pp. 1585-
1594.
Cheng, S.H., Lau, D.T. and Cheung, M.S. (2003), Comparison of numerical
techniques for 3D flutter analysis of cable-stayed bridges, Computers and Structures,
Vol. 81: pp. 2811–2822.
Clough, R. W. and Penzien, J. (1975), Dynamics of structures, McGraw-Hill, New
York, USA.

Bibliography
473
Craig, R. R (1996), Structural dynamics - An introduction to computer methods, John
Wiley & Sons, New York, USA.
De Silva, C.W. (2000), Vibration: Fundamentals and Practice, CRC Press, London,
UK.
Escalona, J.L., Mayo, J. and Dominguez, J. (1999), A new numerical method for the
dynamic analysis of impact loads in flexible beams, Mechanism and Machine Theory,
Vol. 34: pp. 765-780.
Esmailzadeh, E. and Ghorashi, M. (1995), Vibration analysis of beams traversed by
uniform partially distributed moving masses, Journal of Sound and Vibration, Vol.
184 (1): pp. 9-17.
Esmailzadeha, E. and Jalilib, N. (2003), Vehicle-passenger-structure interaction of
uniform bridges traversed by moving vehicles, Journal of Sound and Vibration, Vol.
260: pp. 611–635.
Fagan, M. J. (1992), Finite element analysis - Theory and practice, Prentice Hall,
London, UK.
Fenner, R. T. (1989), Mechanics of solids, Blackwell Scientific Publications, Oxford.
Foda, M.A. and Abduljabbar, Z. (1998), A dynamic green function formulation for the
response of a beam structure to a moving mass, Journal of Sound and Vibration, Vol.
210 (3): pp. 184_295.
Gohary, A.E. (2001), Global stability of the rotational motion of a rigid body
containing moving masses, International Journal of Non-Linear Mechanics, Vol. 36:
pp. 663669.
Gomez, I. and Vadillo, E.G. (2003), A linear model to explain short pitch corrugation
on rails, Wear, Vol. 255: pp. 1127–1142.

Bibliography
474
Guo, W.H. and Xu, Y.L. (2001), Fully computerised approach to study cable-stayed
bridge-vehicle interaction, Journal of Sound and Vibration, Vol. 248 (4): pp. 745-761.
Harris, C.M. and Piersol, A.G. (2002), Harris’ Shock and vibration handbook,
McGraw-Hall, Fifth Edition, New York, USA.
Heather, S. R. (2003), Writing for science and engineering, Buttrtworth-Heinemann,
Oxford, USA.
Henchi, K., Fafard, M., Talbot, M. and Dhatti, G. (1998), An efficient algorithm for
dynamic analysis of bridges under moving vehicles using a coupled modal and
physcial component approach, Journal of Sound and Vibration, Vol. 212 (4): pp. 663-
683.
Huang, C.S., Tsengb, Y.P., Changb, S.H. and Hungb, C.L. (2000), Out-of-plane
dynamic analysis of beams with arbitrarily varying curvature and cross-section by
dynamic stiffness matrix method, International Journal of Solids and Structures, Vol.
37: pp. 495-513.
Jaiswal, O.R. and Iyengar, R.N. (1997), Dynamic response of railway tracks to
oscillatory moving mass, Journal of Engineering Mechanics ASCE, Vol. 123 (7): pp.
753-757.
Jendel, T. (2002), Prediction of wheel profile wear—comparisons with field
measurements, Wear 253, Vol. (89–99): pp.
Jiang, R.J., Au, F.T.K. and Cheung, Y.K. (2003), Identification of masses moving on
multi-span beams based on a genetic algorithm, Computers and Structures, Vol. 81:
pp. 2137–2148.
Jin, X.S., Wen, Z.F. and Wang, K.Y. (2005), Effect of track irregularities on initiation
and evolution of rail corrugation, Journal of Sound and Vibration, Vol. 285: pp. 121–
148.

Bibliography
475
Karoumi, R. (1998), Response of cable-stayed and suspension bridges to moving
vehicles. Analysis methods and practical modelling techniques, PhD Thesis,
Department of Structural Engineering, Royal Institute of Technology (KTH),
Stockholm, Sweden.
Kim, S.M. (2004), Vibration and stability of axial loaded beams on elastic foundation
under moving harmonic loads, Engineering Structures, Vol. 26: pp. 95–105.
Kiss, K. and Dunai, L. (2000), Stress history generation for truss bridges using multi-
level models, Computers and Structures, Vol. 78: pp. 329-339.
Kwark, J.W., Choi, E.S., Kim, Y.J., Kim, B.S. and Kim, S I. (2004), Dynamic
behavior of two-span continuous concrete bridges under moving high-speed train,
Computers and Structures, Vol. 82: pp. 463–474.
Law, S.S. and Zhu, X.Q. (2005), Bridge dynamic responses due to road surface
roughness and braking of vehicle, Journal of Sound and Vibration, Vol. 282 (3-5): pp.
805-830.
Lee, H.P. (1996), Dynamic response of a beam with a moving mass, Journal of Sound
and Vibration, Vol. 191 (2): pp. 289-294.
Lee, H.P. (1996), Transverse vibration of a Timoshenko beam acted on by an
accelerating mass, Applied Acoustics, Vol. 47 (4): pp. 319-330.
Lei, X. and Noda, N.A. (2002), Analyses of dynamic response of vehicle and track
coupling system with random irregularity of track vertical profile, Journal of Sound
and Vibration, Vol. 258 (1): pp. 147–165.
Logan, D. L. (1993), A first course in finite element methods, Thomson Publishing,
Boston, USA.

Bibliography
476
Menini, L. and Tornambe, A. (2001), Velocity observers for linear mechanical
systems subject to single non-smooth impacts, Systems & Control Letters, Vol. 43: pp.
193–202.
Michaltsos, G. and Sophianopoulos, D. (1996), The effects of a moving mass and
other parameters on the dynamic response of a simply supported beam, Journal of
Sound and Vibration, Vol. 191 (3): pp. 357-362.
Michaltsos, G.T. (2001), The influence of centripetal and coriolis forces on the
dynamic response of light bridges under moving vehicles, Journal of Sound and
Vibration, Vol. 247 (2): pp. 261-277.
Michaltsos, G.T. (2002), Dynamic behaviour of a single-span beam subjected to loads
moving with variable speeds, Journal of Sound and Vibration, Vol. 258 (2): pp. 359–
372.
Mofid, M. and Akin, J.E. (1996), Discrete element response of beams with travelling
mass, Advances in Engineering Software, Vol. 25: pp. 321-331.
Nielsen, J.C.O. (2003), Numerical prediction of rail roughness growth on tangent
railway tracks, Journal of Sound and Vibration, Vol. 267: pp. 537–548.
Nielsen, J.C.O. and Igeland, A. (1995), Vertical dynamic interaction between train
and track-influence of wheel and track imperfections, Journal of Sound and Vibration,
Vol. 187 (5): pp. 825-839.
Pan, T.C. and Li, J. (2002), Dynamic vehicle element method for transient response of
coupled vehicle-structure systems, Journal of Structural Engineering, Vol. 128 (2): pp.
214-223.
Park, S. and Youm, Y. (2001), Motion of a moving elastic beam carrying a moving
mass - analyses and experimental verification, Journal of Sound and Vibration, Vol.
240 (1): pp. 131-157.

Bibliography
477
Sato, Y., Matsumoto, A. and Knothe, K. (2002), Review on rail corrugation studies,
Wear, Vol. 253: pp. 130–139.
Senthilvasan, J., Thambiratnam, D.P. and Brameld, G.H. (2002), Dynamic response of
a curved bridge under moving truck load, Engineering Structures, Vol. 24: pp. 1283–
1293.
Shadnam, M.R., Mofid, M. and Akin, J.E. (2001), On the dynamic response of
rectangular plate with moving mass, Thin-Walled Structures, Vol. 39: pp. 797–806.
Sheng, X., Jones, C.J.C. and Thompson, D.J. (2004), A theoretical model for ground
vibration from trains generated by vertical track irregularities, Journal of Sound and
Vibration, Vol. 272: pp. 937–965.
Siddiqui, S.A.Q., Golnaraghi, M.F. and Heppler, G.R. (2000), Dynamic of a flexible
beam carrying a moving mass using perturbation, numerical and time frequency
analysis techniques, Journal of Sound and Vibration, Vol. 229 (5): pp. 1023-1055.
Siddiqui, S.A.Q., Golnaraghi, M.F. and Heppler, G.R. (2003), Large free vibrations of
a beam carrying a moving mass, International Journal of Non-Linear Mechanics, Vol.
38: pp. 1481-1493.
Silva, J.G.S. (2004), Dynamical performance of highway bridge decks with irregular
pavement surface, Computers and Structures, Vol. 82 (11-12): pp. 871-881.
Song, M.K., Noh, H.C. and Choi, C.K. (2003), A new three-dimensional finite
element analysis model of high-speed train–bridge interactions, Engineering
Structures, Vol. 25: pp. 1611–1626.
Stribersky, A., Moser, F. and Rulka, W. (2002), Structural dynamics and ride comfort
of a rail vehicle system, Advances in Engineering Software, Vol. 33: pp. 541–552.
Thomson, W. T. (1998), Theory of vibration with applications, Prentice Hall, New
Jersey, USA.

Bibliography
478
Wu, J.J., Whittaker, A.R. and Cartmell, M.P. (2001), Dynamic responses of structures
to moving bodies using combined finite element and analytical methods, International
Journal of Mechanical Sciences, Vol. 43: pp. 2555–2579.
Xia, H., Roeck, G. De, Zhang, H.R. and Zhang, N. (2001), Dynamic analysis of train-
bridge system and its application in steel girder reinforcement, Computers &
Structures, Vol. 79: pp. 1851-1860.
Xia, H. and Zhang, N. (2005), Dynamic analysis of railway bridge under high-speed
trains, Computers and Structures, Vol. 83: pp. 1891–1901.
Xia, H., Zhang, N. and Roeck, G. De (2003), Dynamic analysis of high speed railway
bridge under articulated trains, Computers and Structures, Vol. 81: pp. 2467–2478.
Xu, X., Xu, W. and Genin, J. (1997), A non-linear moving mass problem, Journal of
Sound and Vibration, Vol. 204 (3): pp. 495-504.
Yavari, A., Nouri, M. and Mofid, M. (2002), Discrete element analysis of dynamic
response of Timoshenko beams under moving mass, Advances in Engineering
Software, Vol. 33: pp. 143-153.
Zaman, M., Taheri, M.R. and Khanna, A. (1996), Dynamic response of cable-stayed
bridges to moving vehicles using the structural impedance method, Appl. Math.
Modelling, Vol. 20: pp. 877-889.
Zboinski, K. (1998), Dynamical investigation of railway vehicles on a curved track,
European Journal of Mechanics and Solids, Vol. 17: pp. 1001-1020.
Zheng, D.Y., Cheung, Y.K., Au, F.T.K. and Cheng, Y.S (1998), Vibration of multi-
span non-uniform beams under moving loads by using modified beam vibration
function, Journal of Sound and Vibration, Vol. 212 (3): pp. 455-467.