Capstone Fall 2021-Spring 2022 Project Description
3
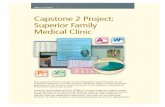
Capstone Fall 2021-Spring 2022 Project Description Title: Lower Limb Assistive Exoskeleton for Multiple Sclerosis Pain Statement: Consider the simple act of walking (Figure 1). Imagine commanding your leg to move forward to initiate a step and it shifts to the side and rotates instead. This is a reality for many of the estimated 1 million individuals (in the US alone) living with Multiple Sclerosis (MS). Caused by lesions (damaged tissues) on the brain and spinal cord, MS is a disease in which the immune system attacks the protective myelin sheath around the nerves that makes signal conduction possible. This makes it difficult to control voluntary movements with precision, primarily in the legs, and leads to a host of other symptoms including numbness, nerve pain, and severe fatigue with effort. Background: MS comes in various forms, some characterized by a cyclic relapsing (appearance) and remitting (disappearance) of symptoms, while another is characterized by a steady progression of worsening symptoms (Figure 2). This latter form called Primary Progressive MS (PPMS) is rare, occurring in about 1 out of 8 cases of MS. Kevin is a 68-year-old male who was diagnosed with PPMS in 2013. Kevin has always been an avid outdoor enthusiast, enjoying hikes, biking, skiing, and much more. Worsening symptoms and a lack of treatment options forced Kevin into an exploratory search for solutions. At the core of his current approach are strict dietary, exercise, and mental conditioning routines. Perhaps the most awe-inspiring of these is the intensity of his daily workout routine that lasts up to 5 hours and can surpass 2500 calories before most of us have had breakfast. Exercise has bolstered his strength and endurance to support the demands of marathon- like endurance activities, but his declining ability to control subtleties like foot placement during gait, limit Figure 3: Motions of the foot: inversion/eversion, dorsi-/planar-flextion, and medial/lateral rotation. Figure 1. The normal gait cycle is composed of a stance phase and a swing phase initiated by heel strike and toe-off, respectively. Figure 2. Types of MS.
Transcript of Capstone Fall 2021-Spring 2022 Project Description

Capstone Fall 2021-Spring 2022 Project Description Title: Lower Limb Assistive Exoskeleton for Multiple Sclerosis Pain Statement: Consider the simple act of walking (Figure 1). Imagine commanding your leg to move forward to initiate a step and it shifts to the side and rotates instead. This is a reality for many of the estimated 1 million individuals (in the US alone) living with Multiple Sclerosis (MS). Caused by lesions (damaged tissues) on the brain and spinal cord, MS is a disease in which the immune system attacks the protective myelin sheath around the nerves that makes signal conduction possible. This makes it difficult to control voluntary movements with precision, primarily in the legs, and leads to a host of other symptoms including numbness, nerve pain, and severe fatigue with effort. Background: MS comes in various forms, some characterized by a cyclic relapsing (appearance) and remitting (disappearance) of symptoms, while another is characterized by a steady progression of worsening symptoms (Figure 2). This latter form called Primary Progressive MS (PPMS) is rare, occurring in about 1 out of 8 cases of MS. Kevin is a 68-year-old male who was diagnosed with PPMS in 2013. Kevin has always been an avid outdoor enthusiast, enjoying hikes, biking, skiing, and much more. Worsening symptoms and a lack of treatment options forced Kevin into an exploratory search for solutions. At the core of his current approach are strict dietary, exercise, and mental conditioning routines. Perhaps the most awe-inspiring of these is the intensity of his daily workout routine that lasts up to 5 hours and can surpass 2500 calories before most of us have had breakfast. Exercise has bolstered his strength and endurance to support the demands of marathon-like endurance activities, but his declining ability to control subtleties like foot placement during gait, limit
Figure 3: Motions of the foot: inversion/eversion, dorsi-/planar-flextion, and medial/lateral rotation.
Figure 1. The normal gait cycle is composed of a stance phase and a swing phase initiated by heel strike and toe-off, respectively.
Figure 2. Types of MS.

his ability to walk more than a few steps without assistance. With effort, the strength is there, but is misdirected, wasting energy in the wrong directions. After nearly a decade of trial and error approaches to increase mobility, it has become increasingly clear that an exoskeleton approach would be ideal to provide guidance and at least partial assistance to leg movements. As is often the case, one of Kevin’s legs has declined in function faster than the other. As Kevin puts it, “I have a bad leg and a really bad leg”. Kevin’s right leg is the worse of the two, having a tendency for the hip to rotate internally and the foot to invert, plantarflex, and rotate medially as well (Figure 3). With these postural challenges in mind, a preliminary soft exosuit was developed from straps of neoprene, nylon, and elastic. The exosuit (Figure 4) provides adjustable elastic forces to reposition the right leg in a pose that should better allow forward swing of the leg and a heel strike in the right direction. While the suit helps with positioning, right leg function is insufficient to self-propel the leg adequately for walking. Additionally, the exosuit has so much adjustability and lack of form, it is difficult to self-don (takes Kevin about 20 min), and difficult to reposition repeatably to achieve the same level of support. The Need: Kevin needs a lightweight exoskeleton structure that secures to the body in a consistent manner with little effort. It should provide limb postural corrections similar to the previous exosuit, and then allow attachment of motors that provide partial assistance to support limb movement during gait at the hip, knee, and ankle. Addressing this need will require students to:
1. Understand client gait limitations and support needs.
2. Learn about basics of normal gait at the hip, knee, and ankle in the primary plane of movement (sagittal plane, Figure 5).
3. Design organic shapes in Solidworks using solid and surface modeling techniques.
4. Learn about our continuous-fiber-reinforced 3d printer and associated software and use to reinforce prints where needed.
5. Iteratively prototype, evaluate, and redesign.
6. Communicate proactively with client remotely via tele- or video-conference tools.
Figure 4. Exosuit.
Figure 5. Torque and power at the hip, knee, and ankle in “normal” gait.

Possible Approaches: Combine benefits of 3D-printed ergonomic structural elements (carbon-fiber-reinforced nylon) with comfortable internal materials (neoprene foam) and easy to secure fastening (Velcro) to address repeatable placement of existing exosuit. For partial assistance, focus on hip assistance first. Use short Bowden cables to allow freedom in placement of motors. Use 4-bar linkage to convert rotary motion from highly geared motor to cyclic motion assistance for hip flexion/extension. Introduce a spring between actuation and driven link to allow more gradual “guiding” assistance. Add knee or ankle support if time permits. Requirements:
1. Relatively quick and easy to for Kevin to self-don (< 5 min) 2. Lightweight (<20% of limb weight) 3. Comfortable to wear for long durations 4. Stable placement for long durations 5. Up to 25% assistance in sagittal plane walking torques 6. Battery-powered 7. Range of 2 miles
Budget: $2,000 Ideal Team:
3 ME (or 2 ME, 1 BE)