Cannibalism can drive the evolution of behavioural phase polyphenism in...
37
LETTER Cannibalism can drive the evolution of behavioural phase polyphenism in locusts Vishwesha Guttal, 1,2, †,* Pawel Romanczuk, 3, † Stephen J. Simpson, 4 Gregory A. Sword 5 and Iain D. Couzin 1,* Abstract During outbreaks, locust swarms can contain millions of insects travelling thousands of kilometers while devastating vegetation and crops. Such large-scale spatial organization is preceded locally by a dramatic den- sity-dependent phenotypic transition in multiple traits. Behaviourally, low-density ‘solitarious’ individuals avoid contact with one another; above a critical local density, they undergo a rapid behavioural transition to the ‘gregarious phase’ whereby they exhibit mutual attraction. Although proximate causes of this phase polyphenism have been widely studied, the ultimate driving factors remain unclear. Using an individual- based evolutionary model, we reveal that cannibalism, a striking feature of locust ecology, could lead to the evolution of density-dependent behavioural phase-change in juvenile locusts. We show that this behavioural strategy minimizes risk associated with cannibalistic interactions and may account for the empirically observed persistence of locust groups during outbreaks. Our results provide a parsimonious explanation for the evolution of behavioural plasticity in locusts. Keywords adaptation, behavioural plasticity, collective migration, collective animal behaviour, locust plagues, phase- change, spatial evolutionary ecology, self-organization. Ecology Letters (2012) INTRODUCTION Mass migration of insects such as locusts and Mormon crickets are spectacular examples of collective animal movement. During out- breaks, locust swarms can contain millions of individuals, extend up to several kilometers and may travel over continental scales (Farrow 1990; Lovejoy et al. 2006). To meet their nutrient requirements, these insects primarily feed on plants, but may also consume animal matter and often cannibalize each other (Simpson et al. 2006; Bazazi et al. 2008). The insects themselves also serve as a mobile prey resource for their predators. Therefore, insect mass migrations can influence the ecology of a number of plant and animal species spread over large spatial scales. By virtue of their negative agricultural impacts, locust plagues are estimated to influence the livelihood of one in ten people in the world (Simpson & Sword 2008). As such, an under- standing of proximate and ultimate factors that drive their mass migrations can not only reveal general principles of collective motion and the ecology of migration, but also potentially contribute to designing preventive pest-management strategies (Sword et al. 2010). A key step preceding formation of marching migratory bands of juvenile locusts is the expression of a dramatic form of phenotypic plasticity mediated by local conspecific density. The two phenotypic phases, solitarious and gregarious, exhibited by locusts can be dis- tinct in many traits, such as colouration, neurophysiology or behav- iour (Uvarov 1921; Roffey & Popov 1968; Collett et al. 1998; Simpson et al. 1999; Anstey et al. 2009; Simpson & Sword 2009; Pener & Simpson 2009; Ayali and Yerushalmi 2010; Ma et al. 2011; Guo et al. 2011). The differences can be so dramatic that in one species, Locusta migratoria, individuals in different phases were previ- ously considered to belong to separate species (Uvarov 1921). How- ever, it is the behavioural transition that responds most rapidly, within a few hours, to changes in local population density (Anstey et al. 2009; Pener & Simpson 2009). In the Desert locust, Schistocerca gregaria, local density of conspecifics is assessed by tactile and/or visual and olfactory stimuli (Simpson et al. 1999; Simpson et al. 2001; Pener & Simpson 2009). At low population densities, locusts are solitary individuals where they avoid contact with one another. As the local density increases beyond a critical value, behavioural repulsion among insects declines, and subsequently they begin to be attracted towards others. Full gregarious behavioural characteristics including increased activity levels and mutual attraction are acquired within 2–4 h of forced crowding. As gregarious-phase insects are attracted to others crowding them, they provide a positive feedback that can result in the maintenance and spread of the gregarized state, leading to the formation of mass- moving-migratory bands of juveniles and flying swarms of adults (Buhl et al. 2006; Simpson & Sword 2009). Thus, density-dependent gregarisation is a crucial process preceding, and potentially providing an early indicator of devastating locust outbreaks (Sword et al. 2010). The expression of density-dependent phase polyphenism in locusts has independently evolved several times in multiple lineages on differ- ent continents (Pener & Simpson 2009), thus raising an important 1 Department of Ecology and Evolutionary Biology, Princeton University, Princeton, NJ 08540, USA 2 Centre for Ecological Sciences, Indian Institute of Science, Bengaluru, 560012, India 3 Max Planck Institute for Physics of Complex Systems, 01187, Dresden, Germany 4 School of Biological Sciences and Center for Mathematical Biology, The University of Sydney, Sydney, NSW 2006, Australia 5 Department of Entomology, Texas A&M University, College Station, TX 77842, USA *Correspondence: E-mail: [email protected] and [email protected] †VG and PR contributed equally to this work. © 2012 Blackwell Publishing Ltd/CNRS Ecology Letters, (2012) doi: 10.1111/j.1461-0248.2012.01840.x
Transcript of Cannibalism can drive the evolution of behavioural phase polyphenism in...
-
LETTER Cannibalism can drive the evolution of behavioural phasepolyphenism in locusts
Vishwesha Guttal,1,2, †,* Pawel
Romanczuk,3, † Stephen J.
Simpson,4 Gregory A. Sword5 and
Iain D. Couzin1,*
AbstractDuring outbreaks, locust swarms can contain millions of insects travelling thousands of kilometers whiledevastating vegetation and crops. Such large-scale spatial organization is preceded locally by a dramatic den-sity-dependent phenotypic transition in multiple traits. Behaviourally, low-density ‘solitarious’ individualsavoid contact with one another; above a critical local density, they undergo a rapid behavioural transitionto the ‘gregarious phase’ whereby they exhibit mutual attraction. Although proximate causes of this phasepolyphenism have been widely studied, the ultimate driving factors remain unclear. Using an individual-based evolutionary model, we reveal that cannibalism, a striking feature of locust ecology, could lead to theevolution of density-dependent behavioural phase-change in juvenile locusts. We show that this behaviouralstrategy minimizes risk associated with cannibalistic interactions and may account for the empiricallyobserved persistence of locust groups during outbreaks. Our results provide a parsimonious explanationfor the evolution of behavioural plasticity in locusts.
Keywordsadaptation, behavioural plasticity, collective migration, collective animal behaviour, locust plagues, phase-change, spatial evolutionary ecology, self-organization.
Ecology Letters (2012)
INTRODUCTION
Mass migration of insects such as locusts and Mormon crickets arespectacular examples of collective animal movement. During out-breaks, locust swarms can contain millions of individuals, extend upto several kilometers and may travel over continental scales (Farrow1990; Lovejoy et al. 2006). To meet their nutrient requirements, theseinsects primarily feed on plants, but may also consume animal matterand often cannibalize each other (Simpson et al. 2006; Bazazi et al.2008). The insects themselves also serve as a mobile prey resourcefor their predators. Therefore, insect mass migrations can influencethe ecology of a number of plant and animal species spread overlarge spatial scales. By virtue of their negative agricultural impacts,locust plagues are estimated to influence the livelihood of one in tenpeople in the world (Simpson & Sword 2008). As such, an under-standing of proximate and ultimate factors that drive their massmigrations can not only reveal general principles of collective motionand the ecology of migration, but also potentially contribute todesigning preventive pest-management strategies (Sword et al. 2010).A key step preceding formation of marching migratory bands of
juvenile locusts is the expression of a dramatic form of phenotypicplasticity mediated by local conspecific density. The two phenotypicphases, solitarious and gregarious, exhibited by locusts can be dis-tinct in many traits, such as colouration, neurophysiology or behav-iour (Uvarov 1921; Roffey & Popov 1968; Collett et al. 1998;Simpson et al. 1999; Anstey et al. 2009; Simpson & Sword 2009;
Pener & Simpson 2009; Ayali and Yerushalmi 2010; Ma et al. 2011;Guo et al. 2011). The differences can be so dramatic that in onespecies, Locusta migratoria, individuals in different phases were previ-ously considered to belong to separate species (Uvarov 1921). How-ever, it is the behavioural transition that responds most rapidly,within a few hours, to changes in local population density (Ansteyet al. 2009; Pener & Simpson 2009). In the Desert locust, Schistocercagregaria, local density of conspecifics is assessed by tactile and/orvisual and olfactory stimuli (Simpson et al. 1999; Simpson et al.2001; Pener & Simpson 2009). At low population densities, locustsare solitary individuals where they avoid contact with one another.As the local density increases beyond a critical value, behaviouralrepulsion among insects declines, and subsequently they begin to beattracted towards others. Full gregarious behavioural characteristicsincluding increased activity levels and mutual attraction are acquiredwithin 2–4 h of forced crowding.As gregarious-phase insects are attracted to others crowding them,
they provide a positive feedback that can result in the maintenanceand spread of the gregarized state, leading to the formation of mass-moving-migratory bands of juveniles and flying swarms of adults(Buhl et al. 2006; Simpson & Sword 2009). Thus, density-dependentgregarisation is a crucial process preceding, and potentially providingan early indicator of devastating locust outbreaks (Sword et al. 2010).The expression of density-dependent phase polyphenism in locustshas independently evolved several times in multiple lineages on differ-ent continents (Pener & Simpson 2009), thus raising an important
1Department of Ecology and Evolutionary Biology, Princeton University,
Princeton, NJ 08540, USA2Centre for Ecological Sciences, Indian Institute of Science, Bengaluru,
560012, India3Max Planck Institute for Physics of Complex Systems, 01187, Dresden,
Germany4School of Biological Sciences and Center for Mathematical Biology,
The University of Sydney, Sydney, NSW 2006, Australia
5Department of Entomology, Texas A&M University, College Station, TX
77842, USA
*Correspondence: E-mail: [email protected] and
†VG and PR contributed equally to this work.
© 2012 Blackwell Publishing Ltd/CNRS
Ecology Letters, (2012) doi: 10.1111/j.1461-0248.2012.01840.x
-
question: What are the key evolutionary forces that have repeatedlyshaped this form of extreme phenotypic plasticity?Previous studies have proposed that selection from interspecifc
interactions, namely predation, has been important in the evolutionof density-dependent polyphenism. Under such scenarios, the bene-fits accrued through active aggregation as local population densitiesincrease can include evading, swamping and/or signalling toxicity topredators through their colouration (Sword 1999; Sword et al. 2005;Simpson & Sword 2009) and/or disrupting the connectivity of pre-dators’ food-patches, thereby reducing risks of predation (Reynoldset al. 2009). However, recent experiments have revealed that individ-ual desert locusts (Schistocerca gregaria) and Australian plague locusts(Chortoicetes terminifera) may both benefit from, and pay a significantcost of group membership due to, cannibalism (Bazazi et al. 2008;Hansen et al. 2011). Therefore, the role of inter-vs. intra-specificprocesses and how trade-offs in the costs and benefits of gregarisa-tion have influenced the evolution of the density-dependentbehavioural phase-change remains unclear.In this article, we use an individual-based and spatially explicit evo-
lutionary model, implemented on massively parallel graphics process-ing units (GPUs) (Guttal & Couzin 2010, 2011), to investigate theinfluence of risks of cannibalism on the evolution of behaviouralstrategies in locusts. This is based on empirically motivated models(Romanczuk et al. 2009; Bazazi et al. 2011) which have been success-ful in explaining a range of experimental data on the formation anddynamics of coherent bands (Buhl et al. 2006; Buhl et al. 2011; Bazaziet al. 2011). A key (and differentiating) aspect of our model is thatwe consider a framework in which behavioural interactions and plas-ticity are not pre determined, but rather they evolve. This allows us
to explore the selection pressures, and evolutionary stable strategies/states, of individual movement and local interactions relevant tomigratory band formation and spatial movement. We test generalityof our results to various modifications of the model and discuss itsimplications to our understanding of proximate and ultimate factorsunderlying locust ecology.
MATERIALS AND METHODS
Evolutionary model for local interactions and movement
We introduce a modelling framework for the collective dynamics oflocusts, consisting of an individual-based model for the motion andinteraction of individual insects in two spatial dimensions (Box 1),coupled to an evolutionary algorithm (Box 2) for the socialresponse of individuals.The ability of locusts to modify their direction of motion in
response to the relative motion of nearby individuals (Bazazi et al.2008; Romanczuk et al. 2009; Buhl et al. 2011), defined as those withina sensory radius of ls , is taken into account via two continuous evolv-able social traits. The first trait, denoted by xai , determines how anindividual i moves in response to a perceived approach by others, i.e.,when the relative velocity between them is negative. A negative valueof xai will result in a focal individual moving away from approachinglocusts. In the following we will refer to this response as an ‘escape’behaviour, in analogy to the neurophysiologically characterizedresponse to looming visual stimuli in locusts (Rind et al. 2008; Rogerset al. 2010). A positive value of xai will have the opposite effect, i.e.,movement towards insects that approach.
Box 1 Individual-based model of locust movement and local interactions
We consider self-propelled motion of individuals with a constant speed s0 in two spatial dimensions. The equations of motion for the posi-tion vector riðtÞ of the focal individual i and its instantaneous direction of motion, given by the unit vector v̂i ¼ ðcos hiðtÞ; sin hiðtÞÞT readd
dtri ¼ vi ¼ s0v̂i ;
d
dthi ¼
1
s0fSi;h þ rhni;hðtÞ! "
; ð1Þ
where, fSi;h ¼ f Si;h % v̂i;h, with v̂i;h ¼ ð& sin hiðtÞ; cos hiðtÞÞT , is the component of the total ‘social force’ f Si perpendicular to the directionof motion, which induces turning of the individual due to interactions with others. The last term accounts for the randomness in themotion of individuals with rhni;hðtÞ being an uncorrelated Gaussian random number with mean zero and variance r2h determining thestrength of angular fluctuations.The total social force consists of three terms: f Si ¼ f ai þ fmi þ f ri . The first two terms model the response to approaching ðf aiÞ and
moving-away individuals ðfmiÞ within a finite sensory range ls . The focal individual i distinguishes approach from moving away of individualj via the sign of the relative velocity vji ¼ ðvj & viÞ % r̂ji . The first two response terms read
f ai ¼xainai
X
j 6¼ijvji ĵrji if vji \ 0 and rji \ ls; ð2Þ
fmi ¼xminmi
X
j 6¼ijvji ĵrji if vji > 0 and rji \ ls; ð3Þ
where xai , xmi are evolvable response strengths which might be positive or negative, corresponding to attraction or repulsion. Both forcesact along the unit vector r̂ji ¼ ðrj & riÞ=jrj & ri j pointing from individual i towards individual j and are normalized by the correspondingnumber of interacting partners nai , nmi . Furthermore, the response is assumed proportional to jvji j, leading to stronger response to fasterapproaching or moving-away individuals.The third force term (f ri ) is a short-range repulsion, modelling the tendency of individuals to maintain a minimum distance lb \ ls to others,
independent of their relative velocities (see Appendix S1 for further model details, and Appendix S3 for discussion of a variable speed model).
© 2012 Blackwell Publishing Ltd/CNRS
2 V. Guttal et al. Letter
-
Box 2 Evolutionary algorithm
The behavioural strategy given by the response strengths may evolve freely within a rectangular two-dimensional phenotype space&X ' xai ;xri ' X with Ω > 0.During the numerical integration of the individual-based model, the fitness F i of individual i corresponding to phenotype (xai ;xmi )
changes due to encounters with other individuals. It evolves according to
d
dtF i ¼ GiðtÞ ¼
X
j 6¼i
ð1& xbÞC & xbB if rji \ lb0 else
#ð4Þ
where C and B are cost and benefit functions which in general depend on the positions and velocities of the encountering individualsC ¼ Cðri ; rj ; vi ; vjÞ, B ¼ Bðri ; rj ; vi ; vjÞ (see Appendix S1, S3, S6, S7 and S8 for different forms of cost-benefit functions). The term wb isa measure of relative importance of benefits of nutrients obtained through cannibalizing others to the costs of being cannibalized by others.In general, this implies asymmetric pay-offs to interacting individuals. Please note that, according to Eq. 4, encounters between more thantwo individuals may take place at a given point in time.The fitness F i is reset to 0 after a finite transient time str to exclude influence of initial conditions and then integrated over a finite time
sfit : F i ¼Z strþsfit
strdt 0Giðt 0Þ:
Finally, the fitness for each individual (phenotype) is averaged over different realizations of the system.To determine the next generation, a bout of selection according to the individual fitness is performed, where individuals (phenotypes)
with higher relative fitness have a higher probability to be selected. The phenotypes of offspring undergo a mutation, which is modelled byan additive Gaussian noise with zero mean and a small variance (r2l).After a sufficient number of generations (typically 100–1000) the evolved traits approach a stationary distribution. For unimodal trait dis-
tributions, we define the ESS as the average phenotype ð !xai ; !xmiÞ. Stationary trait distributions with multiple peaks can be interpreted as acoexistence of different strategies (mixed strategies; Maynard–Smith 1984), corresponding to the different maxima of the evolved distribu-tion. In the cases studied here only unimodal stationary phenotype distributions were obtained.Due to the possible extremely high fitness costs of aggression (e.g. injury, death), a special emphasis is put on costs-dominated pay-off
functions, whereby different types of pay-off functions have been studied. Our analysis shows that the general results on the ESS are insen-sitive to the detailed dependence of the pay-offs (in particular costs) on the encounter geometry. Furthermore, we have performed addi-tional simulations with heterogeneous but non-inheritable pay-offs (different costs/benefits for different individuals), accounting forindividual variations in tendency to cannibalise, or to be cannibalised by, others. The corresponding results confirm our general findings forconstant pay-offs, even for large pay-off variations (see Appendix S1, S3, S6, S7 and S8 for details).
The second evolvable trait captures individuals’ response to thosemoving away, denoted by xmi . Here, a positive value of xmi willmake them move towards those moving away. Again, relating thissocial behaviour to the visual loom response, we will refer to theselective attraction to moving-away individuals (xmi > 0) as ‘pur-suit’ behaviour. This is further supported by the structural similarityof the simulated collective dynamics of identical individuals withxmi > 0 to the corresponding social response in a model of collec-tive motion introduced by Romanczuk et al. 2009. In this previousmodel, where individuals can have variable speeds, it has beenshown that pursuit behaviour will lead to reduced distance betweenindividuals. A negative value of this trait (xmi ) will lead individualsto turn away from those moving away resulting in increased dis-tance between individuals and is therefore equivalent to a repulsivebehaviour. Our simulations show that these features continue tohold even when speeds of both individuals are equal and constant.Therefore, we employ a simpler constant speed version of themodel which allows us to perform a more comprehensive analysisof evolutionary dynamics. We have verified that a more complexvariable-speed model does not affect the qualitative nature of thekey results of our article (Appendix S3 and S4).For both xai and xmi , the larger the magnitude of the trait, the
faster is the rate at which individuals turn, and thus move toward
their desired direction (see Box 1, and Appendix S1, for details ofthe model implementation).These local interaction rules capture a deliberately wide range of
both individual and group behaviours, including a solitary correlatedrandom walk (when xai ( 0 and xmi ( 0), avoidance behaviour(xai and xmi ), polarized swarms (xai and xmi ) 0), head-to-headattraction (xai > 0 and xmi ) and the formation of unpolarizedaggregations (xai > 0 and xmi > 0; see Appendix S2 for represen-tative spatial patterns).Locusts that do not detect and/or respond to the approach of
others, in particular to approach from behind, are vulnerable tocannibalism (Bazazi et al. 2008; Hansen et al. 2011). We incorpo-rated this empirical observation by assigning costs to individualsthat are approached by others within a small radius lb (with lb),comparable to their body size. Individuals who cannibalize othersmay also be able to compensate for nutritional deficiencies in aresource-limited environment (Hansen et al. 2011). This is incor-porated by allowing individuals to accumulate benefits when theyare within a small distance lb of others’ abdomens i.e., able tofeed upon others’ rear ends (see Appendix S3 and S7 for alterna-tive implementations of costs and benefits). It is the behaviourof individuals, in the context of the strategies employed by oth-ers in the population, which results in the relative fitness of their
© 2012 Blackwell Publishing Ltd/CNRS
Letter Cannibalism & phase polyphenism in locusts 3
-
strategy (based on the balance of costs and benefits accrued bythem, and by others). Individuals reproduce with a probabilitythat is proportional to their relative fitness and pass on theirsocial traits (xai and xmi ) to offspring with a small rate of muta-tion.We evolve populations in this way until an evolutionary stable
distribution of these behavioural traits is reached (see Box 2 andAppendix S1; also see Maynard-Smith 1982; Guttal & Couzin2010). We note that our focus is not the evolution of cannibal-ism, which is widespread in a diverse range of taxa from proto-zoa to mammals (Elgar & Crespi 1982; Polis & Holt 1992), butto examine how the threat of cannibalism that already exist ininsects can influence evolutionary stable strategy (ESS) of localinteractions. Having obtained such ESS at a range of fixed popu-lation densities, we then determine whether behavioural plasticity(polyphenism) can evolve when individuals are exposed to fluctu-ating population densities. We also investigate extensions of themodel, such as inclusion of variable speed, modification of localinteractions and how cannibalistic costs and benefits are accrued,individual variations in costs and benefits of cannibalism, andfind that these do not affect the qualitative nature of our results(see Appendix S3, S4, S5 and S8).
RESULTS
Risk of cannibalism can select for density-dependent behaviouralstrategies
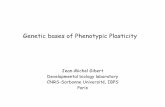
We begin by exploring how (any) costs of cannibalism affect theevolution of individual behaviours as a function of insect density.For a wide range of cost functions, and their parameter values, wefind that evolved interaction strategies exhibit a sharp non-lineartransition as a function of conspecific density (Fig. 1a; AppendixS3). At low population densities, individuals evolve ‘avoidancebehaviour’ (xai , xmi ; both large in magnitude) whereby they avoidall neighbours, regardless of whether they are approaching or mov-ing away. Above a critical density, denoted by qc , individuals evolvean ‘escape-pursuit behaviour’ (xai , xmi > 0; both large in magni-tude), which involves selective repulsion and attraction with otherindividuals. Specifically, they move away from those movingtowards them (escape) and are attracted towards those moving awayfrom them (pursuit).In the low-density avoidance behaviour, individuals typically
spread out in space and do not exhibit coordinated motion (1c–d).Beyond qc , however, the evolved escape-pursuit behaviours result inindividuals aligning locally their direction of motion, resulting in the
A snapshot at density = 1.5
Density (individuals per detection area)
Evo
lved
trai
tsP
olar
izat
ion
A snapshot at density = 0.2(a) (c) (e)
(b) (d) (f)
0.8
0.6
0.5
0.2
0.00.0 0.3 0.6 0.9 1.2 1.5
ai
mi
0.25
0.50
0.0
–0.25
–0.50
Figure 1 The evolution of behavioural polyphenism and swarm formation (a) The evolutionary stable strategy (ESS) in ‘response to those approaching’ (xai), and‘response to those moving away’ (xmi), as a function of density (ρ). (b) Polarisation, a measure of coherence in motion of the evolved population, as a functionof density. (c and e) Spatial patterns of solitarious (ρ = 0.2) and gregarious (ρ = 1.5) behaviours, respectively. (d and f) Close up views of boxed regions from (c)and (e). Parameters: size of population N = 16384, degree of nutritional benefits wb = 0. For other parameter values, details of methods and generality, seeAppendix S1–S3.
© 2012 Blackwell Publishing Ltd/CNRS
4 V. Guttal et al. Letter
-
formation of large mobile bands (Fig. 1e–f), as exhibited by reallocusts (Buhl et al. 2006; Buhl et al. 2011). Consequently, polarisa-tion, a measure of coordination in movement of individuals withinand across groups (Vicsek et al. 1995; Couzin et al. 2002), of theevolved populations display an abrupt density-dependent transitionresembling the sudden onset of locust swarms in the real world(Simpson & Sword 2008).To determine the adaptive significance of a density-dependent
shift in behavioural strategy, we compute the risks of cannibalism asa function of density and the two social traits, xai and xmi (seeAppendix S4 for related methods). We find that, at low densities,the evolved avoidance behaviour (xai and xmi ; i.e., the tendency toturn away from any nearby individual) reduces the number ofencounters, and thus the risk of cannibalism (Fig. 2a). Therefore, aninvasion by an escape-pursuit strategy (xai and xmi > 0) is notevolutionarily stable. However, encounters become unavoidablebeyond a critical density (qc ). At such densities, avoidance-behaviourindividuals continue to move away from all nearby individuals.However, an individual with an escape-pursuit strategy in a popula-tion of avoidance-phase individuals moves in the direction of thosemoving away. This kind of movement strategy exploits the areas leftvacant by other individuals, thus reducing its own frequency of con-tacts with others and thereby the risks of cannibalism. As a resultthe escape-pursuit strategy is selected for and eventually it domi-nates the population (Fig. 2a). It is this evolved behaviour thatresults in the formation of mobile and coherent groups (Fig. 2b).In summary, the low-density evolved strategy is to avoid all nearby
individuals. At high densities, the evolved escape-pursuit behaviour,corresponding to selective repulsion and attraction, mediates large-scale coordinated movement (Bazazi et al. 2008). This density-depen-dent strategy reduces collisions, and thus minimizes the costs of can-nibalism. These evolved individual behaviours closely resemble thebehaviour of real locusts; the avoidance behaviour is analogous to thesolitarious phase whereas the escape-pursuit strategy relates to thegregarious phase. Put simply, our model suggests that both the solita-rious and gregarious phase behaviours expressed by locusts can be anoutcome of selection on the insects to reduce costs of cannibalism byminimising the frequency of contact with each other.
The evolution of density-dependent behavioural polyphenism
Thus far, we have obtained the ESS in local interactions amonglocusts for fixed global population densities; consequently, weassumed individuals use the same strategy at all times within a gen-eration. In reality, however, the size of insect populations can behighly dynamic, and the locusts themselves express behaviouralplasticity mediated by local population density (Simpson & Sword2009). We, therefore, also investigate whether cannibalism can selectfor density-dependent behavioural polyphenism (or plasticity) whenfaced with density-fluctuating environments within the lifetime ofindividuals. We do so by devising a version of the above model thatallows individuals to sense and respond to local population density.Here, individuals may adopt behaviourally fixed strategies, such asbeing solitarious or gregarious throughout their lifetime, or behavio-urally plastic strategies such as density-dependent transition fromsolitarious to gregarious, or gregarious to solitarious phases. Weincorporate variable environments by assuming that individualsspend a fraction, denoted by fl , of their lifetime in relatively lowglobal population densities with the rest being in relatively high den-sities (see Appendix S5 for details of model implementation).For a wide range of values of fl , and choices of low and high
densities, we find that individuals evolve a behaviourally plasticstrategy, i.e., when at a local density below a threshold value, andthus encountering relatively few individuals, they adopt avoidancebehaviour. If individuals experience higher local densities, how-ever, they switch to a gregarious strategy whereby they areattracted to those moving away, thereby forming groups andmobile bands. Thus, we demonstrate that selection to reduce therisk of cannibalism can also account for the evolution of density-dependent behavioural polyphenism (or plasticity) that correspondsto locusts’ behavioural phase-change in response to changing localdensities.
Memory effects in gregarisation
Experimental studies of Schistocerca gregaria demonstrate that behavio-ural gregarisation within an individual’s lifetime occurs more rapidly,
(a) Relative fitness
Res
pons
e to
mov
ing
away
(ω
mi)
0.5 1 1.5−0.5
−0.25
0
0.25
0.5(b)
Density (individuals per detection area)
Polarization
0.5 1 1.5−0.5
−0.25
0
0.25
0.5
0
0.2
0.4
0.6
0.8
1
Figure 2 Density-dependent polyphenism as an adaptive strategy to reduce costs of cannibalism. (a) Relative fitness, and (b) Polarisation, of unimodal phenotypicpopulations given by a narrow Gaussian distribution around mean behavioural traits as a function of density (ρ) and mean response to moving away (xmi,). Here, we setxai = -0.5. N = 256 and the width of the Gaussian phenotype distribution rx
2 = 0.02. See Appendix S4 for details of computing relative fitness landscapes.
© 2012 Blackwell Publishing Ltd/CNRS
Letter Cannibalism & phase polyphenism in locusts 5
-
e.g., within 2 h (Anstey et al. 2009; Pener & Simpson 2009), incomparison to the reverse process of behavioural solitarisation,which may take several developmental stages or even generations(via a parentally mediated epigenetic mechanism) to complete ( Ellis1963a, , b; Miller et al. 2008; Tanaka & Maeno 2010).Motivated by these observations, we investigate memory effects
in the evolved behavioural strategies. To do so, we revert to the ori-ginal model (see Materials and Methods, and Appendix S1, fordetails) and determine an evolutionary stable state for a given popu-lation. We then make small changes to the values for insect density(either increasing, or decreasing), and employ the evolved state fromthe previous values of density as the input for further adaptation oftraits (xai and xmi ); this mimics the empirical observation that thephase state of a parent can be transferred to an offspring. Note thatthis method determines a locally stable ESS, which is in contrast toour results shown in Fig. 1 where we focused on obtaining a robustESS among many possible evolved states (see Appendix S1 fordetails; also see Ellis 1963b).As before, we find a non-linear transition from solitarious to gre-
garious behaviour as a function of increasing population density (3a,b). However, when we restore the population density to lower val-ues, gregarisation does not decline at the same value at which it firstappeared. It continues to persist until lower densities, i.e., it exhibits
memory, or hysteresis (Fig. 3a). As a consequence, once a band oflocusts are on the march, it may require a much greaterreduction in population density to return insects to the solitariousstate (Fig. 3b).
Limited resources and nutritional benefits of cannibalism
So far we have shown that the costs of cannibalism alone can drivethe evolution of phase-change behaviour. We note that cannibalismis a common response to nutritional deficiency in animals, especiallywhen environments are limited in resources (Elgar & Crespi 1982;Richardson et al. 2010) and it may lead to either nutritional imbal-ance or benefits. For example, when insects that are carbohydratedeficient consume protein-rich conspecifics, they will be even morenutritionally imbalanced resulting in potential fitness costs (Simpsonet al. 2004). This is equivalent to increasing the cost of cannibalism,and thus the density-dependent gregarisation remains the ESS. Onthe other hand, cannibalism can provide critical nutritional benefitswhen insects are locally deprived of protein and salt, as in Mormoncrickets and desert locusts (Simpson et al. 2006; Bazazi et al. 2008;Bazazi et al. 2011). Therefore, we consider the role of nutritional
0 0.25 0.5 0.75 1
Density (individuals per detection area)
–0.4
–0.2
0
0.2
0.4
0 0.25 0.5 0.75 1
–0.4
–0.2
0
0.2
0.4
Res
pons
e to
app
roac
h (ω
ai)
Res
pons
e to
mov
ing
away
(ω
pi)
wb = 0.00
wb = 0.33
wb = 0.50
wb = 0.66
wb = 1.00
(a)
(b)
Figure 4 Role of nutritional benefits of cannibalism. Evolved strategies (a) xai,and (b) xmi as a function of density for different degrees of nutritional benefitswb. See Appendix S6–S8 for generality and relative fitness landscapes.
0 0.25 0.5 0.75 1Density (individuals per detection area)
0
0.3
0.6
0.9
Pol
ariz
atio
n
0 0.25 0.5 0.75 1
–0.4
–0.2
0
0.2
0.4
Res
pons
e to
mov
ing
away
(ω
pi)
Increasing ρDecreasing ρ
(a)
(b)
Figure 3 Memory effects in gregarisation. (a) Evolved xmi, as a function ofdensity. The solid black line represents response to increasing ρ, whereas brokenred line is the response to declining ρ. The evolved xai,, as in Fig 1a, isindependent of density and does not show hysteresis. (b) Polarisation of the
evolved population. Here, N = 256 and wb = 0.
© 2012 Blackwell Publishing Ltd/CNRS
6 V. Guttal et al. Letter
-
benefits that cannibalism may provide. Our simulations show thateven if the costs of cannibalism are relatively small, but outweighthe nutritional benefits, the density-dependent phase-change strategycontinues to be evolutionarily stable (Fig. 4a,b; also see AppendixS6 and S7). When the benefits of nutrition exceed the costs of can-nibalism, however, the evolved behaviour for all densities is that of‘pure attraction’ (xai > 0 and xmi > 0; i.e., individuals movetowards those who approach, or move away from, the focal individ-ual). This results in formation of aggregates which typically remainunpolarised and are not mobile.
DISCUSSION
We propose, and provide evidence for, the hypothesis that cannibal-ism could have been a key factor in the evolution of behaviouralphase polyphenism in locusts. We demonstrate that at low insectdensities, the evolutionarily stable strategy is to avoid all nearbyindividuals leading to spatial spread across the landscape. As localdensity increases above a critical value (qc ), however, the favouredstrategy is for individuals to move away from those who approachwhile being attracted to those moving away. This results in the for-mation of dense mobile aggregates. Counter-intuitively, our resultssuggest that a low-density avoidance behaviour followed by a transi-tion to a gregarious behaviour beyond the critical density are bothadaptations to reduce risks of cannibalism. This is favored as a plas-tic strategy across a wide range of fluctuating density regimes.Results of our model are broadly consistent with the behaviour
of locusts at the level of both individuals and collectives. That solit-arious locusts avoid each other, and that gregarious locusts areattracted towards other individuals has been known for a long time(Ellis 1963a; Roessingh & Simpson 1994). Recent experiments pro-vide evidence that gregarious individuals tend to move away fromthose who approach them to avoid risks of cannibalism, resulting information of migratory bands of locusts (Bazazi et al. 2008). Ourcannibalism hypothesis is also shown to account for the observedhysteresis, or memory, effect evident in individual desert locustphase-change behaviour ( Ellis 1963a, , b; Miller et al. 2008; Tanaka& Maeno 2010).We test the robustness of our results by considering other realis-
tic biological scenarios, such as role of nutritional benefits of canni-balism, more complex cost–benefit structures, and the movement ofindividuals at variable speeds. These modifications did not affectthe qualitative nature of our results as long as the benefits of canni-balism are less than the costs. When benefits did exceed costs, how-ever, we do not find conditions that favour the evolution ofdensity-dependent behavioural polyphenism. Instead, for all densi-ties, we find a ‘pathological’ strategy of moving towards those whoare approaching, as well as those running away, resulting in repeatedhead-to-head interactions and grouping unlike that seen in nature.Thus, our work provides evidence that the cost of cannibalism maybe a significant ecological factor influencing the evolution ofbehavioural phase-change.Our model predicts that behaviour of locusts will change from
gregarious to solitarious at much lower densities compared to thatat which the solitarious individuals become gregarious. At a qualita-tive level, this is consistent with the empirical observation thatmemory effects exist in the transition between the two phases (Ellis1963a; Pener & Simpson 2009). This suggests that to control locustoutbreaks by reducing the number of mass-migrating gregarious-
phase individuals, insect population densities must be reduced tosubstantially lower levels than those at which gregarisation occurs.This further emphasizes the need for preventive measures that takeinto account the fact that gregarisation may occur in local popula-tions well before widespread outbreaks and swarm formation(Sword et al. 2010).Although individuals in our model interact locally, for tractability
purposes we did not include other realistic features such as roles ofindividual nutritional state (e.g., that protein-deprived individuals aremore likely to cannibalize) and heterogeneity within populations andin the habitat structure (e.g., arising from patchiness in vegetation).An explicit incorporation of these features is unlikely to alter thequalitative nature of our results. As an example, we considered therole of individual variations in locusts’ ability to cannibalise and/orbe cannibalised by others. Such variability may arise due to inherentdifferences among individuals, differences in their nutritional statesand/or differences in environmental conditions experienced bythem. We found that such variations do not affect the qualitativenature of our results (Appendix S8). With regards to spatial hetero-geneity, it has been shown both empirically and computationallythat even in sparsely spread populations, locally high concentrationsof resource patches can promote crowding of locusts, thus creatingconditions favorable for gregarisation (Roffey & Popov 1968;Collett et al. 1998; Simpson & Sword 2009). Furthermore, protein-deprived insects are likely to be attracted towards both other indi-viduals and to patchy resources, which further facilitates crowding.Within our model framework, these can be thought of as effectivelyincreasing the mean population density. Therefore, incorporatinglandscape features will alter the critical mean population density qcat which gregarisation evolves (but does not affect the principleselucidated). More specifically, we predict that the higher the clumpi-ness of resource distribution, the smaller will be the critical globalpopulation density qc at which behavioural phase-change occurs.Several other factors influence costs and benefits accrued by
insects when they are swarming. For example, locusts and otherinsects are likely to be most vulnerable to cannibalism after moult-ing (Pener & Simpson 2009); therefore, swarming can exacerbatethe risk of cannibalism in moulting individuals. It has been recordedduring an earlier field study of our group (Simpson et al. 2006) thatinsects enter a period of quiescence prior to moulting that functionsto separate individuals from the band. However, studies have shownevidence for synchronization in moulting, mediated through a com-bination of pheromones that act as developmental accelerators andretarders (Hassanali et al. 2005; Pener & Simpson 2009), which mayfurther reduce risks of cannibalism. In addition, swarming may pro-vide both increased opportunities and competition for mating.Although we do not consider these features explicitly in our model,our approach of considering costs of cannibalism and benefits ofnutrition as a function of contacts among individuals could allow usto include payoffs of other biological features by modifying to thecost–benefit parameter values.Prior considerations of the evolution of locust behavioural-phase
polyphenism have relied heavily on predation as the principal selectivefactor (Sword 1999; Sword et al. 2000; Sword et al. 2005; Reynoldset al. 2009). In contrast, we have shown that the expression ofbehavioural phase-change mediated by changes in local populationdensity can evolve exclusively due to intraspecific interactions. Weemployed a spatially explicit computational framework where behav-iours can undergo evolutionary change and provide evidence for a
© 2012 Blackwell Publishing Ltd/CNRS
Letter Cannibalism & phase polyphenism in locusts 7
-
new hypothesis that the threat of cannibalism, i.e., conspecific preda-tion, may account for the evolution of density-dependent behaviouralpolyphenism. We do not argue that cannibalism and predation aremutually exclusive, but rather that cannibalism provides a generallyapplicable, intrinsic, and parsimonious mechanism that shouldsimilarly favor the evolution of behavioural polyphenism acrossspecies. The additional anti-predator benefits of aggregation at highdensity undoubtedly occur (Sword et al. 2000; Sword et al. 2005), butsuch benefits are contingent upon a host of other ecological factorsthat are likely to be both temporally and spatially variable includingthe presence or absence of predators and specific host plants,predator movement patterns and abundance, and the availability ofalternative prey items to name just a few.Our study assumed nutrient-deficient conditions where the risks as
well as benefits of cannibalism contribute significantly to an individ-ual’s fitness. When alternative resources are available to supplementindividual’s nutrient deficiencies, locusts may remain herbivores andthus not indulge in cannibalism. It is also worth noting that heteroge-neous environmental conditions are often considered to play animportant role in the evolution of phenotypic plasticity in variousorganisms (West-Eberhard 2003). It would be interesting to extendour computational model to investigate relative roles of cannibalismwith other such plausible ecological factors, as mentioned above, inshaping the behavioural polyphenism in locusts. Furthermore, itwould be interesting to explore the role of various ecological factors,including that of cannibalism, in the evolution of proximate mecha-nisms such as mechanosensory receptors, and phase-specific genesthat induce phase-change in locusts (Anstey et al. 2009; Miller et al.2008; Tanaka & Maeno 2010; Guo et al. 2011).In summary, we provide evidence that the risk of cannibalism could
have been a key ecological factor underlying the evolution of density-dependent polyphenism in locusts. We demonstrate that phase-changebehaviours minimize the costs of cannibalism. In conjunction withrecent empirical works demonstrating the role of cannibalism andnutrition in the march of locust migratory bands (Sword et al. 2005;Bazazi et al. 2008; Romanczuk et al. 2009; Simpson & Sword 2009;Bazazi et al. 2011; Hansen et al. 2011), this work provides insights intoboth proximate and ultimate factors that shape individual locust behav-iour, local interactions between insects and how these local behavioursscale to landscape-level dynamics of locust migratory bands.
ACKNOWLEDGEMENTS
VG and IDC acknowledge support from a Searle Scholar Award08-SPP-201 to I.D.C., Defense Advanced Research Projects AgencyGrant HR0011-05-1-0057 to Princeton University. This work wasalso supported by National Science Foundation Award PHY-0848755 (I.D.C), Office of Naval Research Award N00014-09-1-1074 (I.D.C), Army Research Office Grant W911NG-11-1-0385(I.D.C.), a Ramalingaswami Fellowship, Department of Biotechnol-ogy, Government of India (V. G.) and the Ministry of Environmentand Forests, Government of India (V. G).
AUTHORSHIP
VG, PR and IDC designed the study. VG and PR performedresearch. All authors analyzed the data and synthesized results. VG,PR and IDC wrote the first draft of the manuscript and all authors-contributed to revisions.
REFERENCES
Anstey, M.L., Rogers, S.M., Ott, S.R., Burrows, M. & Simpson, S.J. (2009).
Serotonin mediates behavioural gregarisation underlying swarm formation in
desert locusts. Science, 323, 627–630.Ayali, A. & Yerushalmi, Y. (2010). Locust research in the age of model
organisms. J. Insect. Physiol., 56, 831–833.Bazazi, S., Buhl, J., Hale, J.J., Anstey, M.L., Sword, G.A., Simpson, S.J. &
Couzin, I.D. (2008). Collective motion and cannibalism in locust migratory
bands. Curr. Biol., 10, 735–739.Bazazi, S., Romanczuk, P., Thomas, S., Schimansky-Geier, L., Hale, J.J., Miller,
G.A., Sword, G.A., Simpson, S.J. & Couzin, I.D. (2011). Nutritional state and
collective motion: From individuals to mass migration. Proc. R. Soc. Lond [Biol],
278, 356–363.Buhl, J., Sumpter, D.J.T., Couzin, I.D., Hale, J.J., Despland, E., Miller, E.R., &
Simpson, S.J. (2006). From disorder to order in marching locusts. Science, 312,
1402–1406.Buhl, J., Sword, G.A., Clissold, F.J. & Simpson, S.J. (2011). Group structure in
locust migratory bands. Behav. Ecol. Sociobiol., 65, 265–273.Collett, M., Despland, E., Simpson, S.J. & Krakauer, D.C. (1998). Spatial scales
of desert locust gregarisation. Proc. Natl. Acad. Sci. USA., 95, 13052–13055.Couzin, I.D., Krause, J., James, R., Ruxton, G.D. & Franks, N.R. (2002).
Collective memory and spatial sorting in animal groups. J. Theo. Biol., 218, 1–11.Elgar, M.A. & Crespi, B.J. (1982). Cannibalism: Ecology and Evolution Among Diverse
Taxa. Oxford University Press, UK.
Ellis, P.E. (1963a). Changes in the social aggregation of locust hoppers with
changes in rearing conditions. Anim. Behav., 11, 152–160.Ellis P.E. (1963b). The influence of some environmental factors on learning and
aggregation in locust hoppers. Anim. Behav., 11, 142–151.Farrow, R.A. (1990). Flight and migration in acridoids. In: Biology of Grasshoppers
(eds Chapman, R. & Joern, A.). Wiley, New York, pp. 227–314.Guo, W., Wang, X., Ma, Z., Xue, L., Han, J., Yu, D. & Kang, L. (2011). CSP
and takeout genes modulate the switch between attraction and repulsion
during behavioural phase-change in the migratory locust.PloS Genet, 7,
e1001291.
Guttal, V. & Couzin, I.D. (2010). Social interactions, information use, and the
evolution of collective migration. Proc. Natl. Acad. Sci. USA, 107, 16172–16177.Guttal, V. & Couzin, I.D. (2011). Leadership, collective motion and the
evolution of migratory strategies. Commun. Integr. Biol., 4, 294–298.Hansen, M.J., Buhl, J., Bazazi, S., Simpson, S.J. & Sword, G.A. (2011).
Cannibalism in the lifeboat–collective movement in Australian plague locusts.Beh. Ecol. Sociobiol., 65, 1715–1720.
Hassanali, A., Njagi, P.G.N. & Bashir, M.O. (2005). Chemical ecology of locusts
and related acridids. Annu. Rev. Entomol., 50, 223–245.Lovejoy, N.R., Mullen, S.P., Sword, G.A., Chapman, R.F. & Harrison, R.G.
(2006). Ancient trans-Atlantic flight explains locust biogeography molecular
phylogenetics of Schistocerca.Proc. R. Soc. Lond [Biol], 273, 767–774.Ma, Z.Y., Guo, W., Guo, X., Wang, X. & Kang, L. (2011). Modulation of
behavioural phase-changes of the migratory locust by the catecholamine
metabolic pathway. Proc. Natl. Acad. Sci. USA, 108, 3882–3887.Maynard-Smith, J. (1982). Evolution and the Theory of Games. Cambridge University
Press, Cambridge, UK.
Miller, G.A., Islam, M.S., Claridge, T.D.W., Dodgson, T. & Simpson, S.J. (2008).
Swarm formation in the desert locust Schistocerca gregaria: Isolation and NMR
analysis of the primary maternal gregarizing agent. J. Exp. Biol., 211, 370–376.Pener, M.P. & Simpson, S.J. (2009). Locust phase polyphenism: An update. Adv.
Insect Physiol., 36, 1–272.Polis, G.A. & Holt, R.D. (1992). Intraguild predation: The dynamics of complex
trophic interactions. Trends. Ecol. Evol., 7, 151–154.Reynolds, A.M., Sword, G.A., Simpson, S.J. & Reynolds, D.R. (2009). Predator
percolation, insect outbreaks, and phase polyphenism. Curr. Biol., 19, 20–24.Richardson, M.L., Mitchell, R.F., Reagel, P.F. & Hanks, L.M. (2010). Causes and
consequences of cannibalism in noncarnivorous insects. Annu. Rev. Entomol.,
55, 39–53.Rind, F.C., Santer, R.D. & Wright, G.A. (2008). Arousal facilitates collision
avoidance mediated by a looming sensitive visual neuron in a fying locust.
J. Neurophysiol., 100, 670–680.
© 2012 Blackwell Publishing Ltd/CNRS
8 V. Guttal et al. Letter
-
Roessingh, P. & Simpson, S.J. (1994). The time-course of behavioural phase-
change in nymphs of the desert locust, Schistocerca gregaria. Physiol. Entomol.,
19, 191–197.Roffey, J. & Popov, G. (1968). Environmental and behavioural processes in a
desert locust outbreak. Nature, 219, 446–450.Rogers, S.M., Harston, G.W.J., Kilburn-Toppin, F., Matheson, T., Burrows, M.,
Gabbiani, F. & Krapp, H.G. (2010). Spatiotemporal receptive field properties
of a looming-sensitive neuron in solitarious and gregarious phases of the
desert locust. J. Neurophysiol., 103, 779–792Romanczuk, P., Couzin, I.D. & Schimansky-Geier, L. (2009). Collective motion
due to individual escape and pursuit response. Phys. Rev. Lett., 102, 010602.
Simpson, S.J. & Sword, G.A. (2009). Phase polyphenism in locusts: mechanisms,
population consequences, adaptive significance and evolution. In: Phenotypic
Plasticity of Insects: Mechanisms and Consequences (eds Whitman, D. &
Ananthakrishnan, T.N.). Science Publishers, Plymouth, pp. 147–190.Simpson, S.J., Despland, E., Hagele, B. & Dodgson, T. (2001). Gregarious
behaviour in desert locusts is evoked by touching their back legs. Proc. Natl.
Acad. Sci. USA, 98, 3895–3897.Simpson, S.J., McCaffery, A. & Haegele, B.F. (1999). A behavioural analysis of
phase-change in the desert locust. Biol. Rev., 74, 461–480.Simpson, S.J., Sibly, R.M., Lee, K.P., Behmer, S.T. & Raubenheimer, D. (2004).
Optimal foraging when regulating intake of multiple nutrients. Anim. Beh., 68,
1299–1311.Simpson, S.J., & Sword, G.A. (2008). Locusts.Curr Biol.,18,R364–R366.Simpson, S.J., Sword, G.A., Lorch, P.D. & Couzin, I.D. (2006). Cannibal crickets
on a forced march for protein and salt. Proc. Natl. Acad. Sci. USA, 103, 4152–4156.
Sword, G.A. (1999). Density-dependent warning coloration. Nature, 397, 217–217.Sword, G.A., Lecoq, M. & Simpson, S.J. (2010). Phase polyphenism and
preventative locust management. J. Insect Physiol., 56, 949–957.Sword, G.A., Lorch, P.D. & Gwynne, D.T. (2005). Migratory bands give crickets
protection. Nature, 433, 703–703.Sword, G.A., Simpson, S.J., El Hadi, O.T.M. & Wilps, H. (2000). Density-
dependent aposematism in the desert locust. Proc. R. Soc. Lond [Biol], 267, 63–68.
Tanaka, S. & Maeno, K. (2010). A review of maternal and embryonic control of
phase-dependent progeny characteristics in the desert locust. J. Insect Physiol.,
56, 911–918.Uvarov, B.P. (1921). A revision of the genus Locusta, L. (Pachytylus, Fieb.), with
a new theory as to the periodicity and migrations of locusts. Bull. Ent. Res.,
12, 135–163.Vicsek, T., Czirók, A., Ben-Jacob, E., Cohen, I. & Shochet, O. (1995). Novel
type of phase transition in a system of self-driven particles. Phys. Rev. Lett., 75,
1226–1229.West-Eberhard, M.J. (2003). Developmental Plasticity and Evolution. Oxford
University Press, Oxford, UK.
SUPPORTING INFORMATION
Additional Supporting Information may be downloaded via the onlineversion of this article at Wiley Online Library (www.ecologyletters.com).
As a service to our authors and readers, this journal provides sup-porting information supplied by the authors. Such materials arepeer-reviewed and may be re-organised for online delivery, but arenot copy-edited or typeset. Technical support issues arising fromsupporting information (other than missing files) should beaddressed to the authors.
Editor, Andrew LiebholdManuscript received 30 April 2012First decision made 2 June 2012Manuscript accepted 29 June 2012
© 2012 Blackwell Publishing Ltd/CNRS
Letter Cannibalism & phase polyphenism in locusts 9
-
Supporting Information: Cannibalism can drive the1evolution of behavioral phase polyphenism in locusts2Vishwesha Guttal1,2‡,∗, Pawel Romanczuk3,‡, Stephen J Simpson4, Gregory A. Sword5, Iain D.3
Couzin1,∗41 Department of Ecology and Evolutionary Biology, Princeton University, Princeton, NJ, 08540, USA5
2 Centre for Ecological Sciences, Indian Institute of Science, Bengaluru, 560050, India.6
3 Max Planck Institute for Physics of Complex Systems, 01187, Dresden, Germany.7
4 School of Biological Sciences and Center for Mathematical Biology, The University of Sydney, Sydney, NSW,8
2006, Australia.9
5 Department of Entomology, Texas A&M University, College Station, TX, 77842-2475, USA.10
‡ These authors contributed equally to this manuscript.11∗ Corresponding authors e-mail: [email protected] and [email protected]
Contents13
Appendix S1: Model details 314
1.1 Movement and local interactions . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
1.2 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
1.3 Numerical integration of equations of motion . . . . . . . . . . . . . . . . . . . . 517
1.4 Initial conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618
1.5 Costs, benefits, fitness and selection . . . . . . . . . . . . . . . . . . . . . . . . . 619
1.5.1 Cannibalistic costs and benefits . . . . . . . . . . . . . . . . . . . . . . . 620
1.5.2 Fitness evaluatation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 721
1.5.3 Selection procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 722
1.5.4 Evolutionary stable states and their robustness . . . . . . . . . . . . . . 823
1.6 Polarization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824
1.7 Table: Model parameters and their typical values . . . . . . . . . . . . . . . . . 825
Appendix S2: Different macroscopic states allowed in the model 1026
Appendix S3: Robustness and generality of results (with costs only) 1127
3.1 Model parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1128
3.2 Variable speed model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1129
3.3 Generalized cost functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1230
3.3.1 Motivating quantification of cannibalistic costs . . . . . . . . . . . . . . . 1231
3.3.2 Defining a perfectly linear and maximally nonlinear cost functions . . . . 1332
3.3.3 Cost on the side . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1433
1
-
3.4 Fitness computation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1434
3.4.1 ESS exhibits robust features irrespective of cost functions chosen . . . . . 1435
Appendix S4: Fitness landscapes, adaptive significance and their robustness to36
different cost functions and a variable speed model 1637
4.1 Computing fitness landscape and adaptive significance . . . . . . . . . . . . . . 1638
4.2 Fitness landscapes are insensitive to details of cost functions chosen . . . . . . . 1739
4.3 Qualitative features of fitness landscape remain the same even for a variable speed40
model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1841
Appendix S5: The evolution of behavioral plasticity in variable environments 1942
5.1 Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1943
5.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2044
Appendix S6: Fitness landscapes with the inclusion of nutritional benefits 2245
Appendix S7: Robustness of results with respect to generalized cost-benefit func-46
tions 2447
Appendix S8: Robustness of results with respect to individual variations 2548
Appendix S9: Supplemental References 2749
2
-
Appendix S1: Model details50
1.1 Movement and local interactions51
We consider an insect population of N individuals in a two dimensional environment of size l in52
each dimension. In the absence of other individuals within their zone of local/social interactions,53
defined as a radius of ls around them, focal individuals move randomly with an average speed54
s0 per unit time.55
If other individuals are present within their zone of local interaction, each individual i with56
position ri(t) and velocity vi(t) at time t moves in response to three local ‘social forces’:57
(i) Repulsive ‘force’ (fri): This results from an individual’s tendency to maintain a minimum58
distance of lb with others, modeled as a “soft-core” repulsion between particles when distance59
between them is less than lb. We assume that this individual trait, denoted by ωr and set to a60
value of 2 units (see Table S1), is non evolvable. The effective repulsive force is given by (Bazazi61
et al., 2011)62
fri = −ωrs0nri
∑
j !=i
r̂ji(t) if |rji| < lb (1)
and fri = 0 if |rji ≥ lb|. In the equation above, rji is a position vector from i to j, i.e.,63
rji = rj − ri
and nri is the number of individuals within a distance of lb. Throughout the paper, the bold64
mathematical characters represent vectors and a hat over them indicates that their magnitude65
is normalized to unity.66
(ii) ‘Force’ due to approaching individuals (fai): This is a response to those who move67
towards i, through an evolvable trait called ‘response to approach’ (ωai), with an effective force68
fai =ωainai
∑
j !=i
vji(t)r̂ji(t) if vji < 0 and |rji| < ls (2)
and fai = 0 otherwise, with vji denoting the relative velocity between i and j, i.e.,69
vji(t) = (vj − vi) · r̂ji
and nai is the number of individuals within the zone of local interactions.70
(iii) ‘Force’ due to moving away individuals (fmi): This results from a response to those71
who move away from i, through an evolvable trait called ‘response to moving away’ (ωmi), with72
an effective force73
fmi =ωminmi
∑
j !=i
vji(t)r̂ji(t) if vji > 0 and |rji| < ls (3)
3
-
and fai = 0 otherwise, where nmi(= nai) is the number of individuals within a distance of ls.74
In addition, individuals may be prone to errors in their perception and motion. Together,75
these can be written as following equations of motion:76
ṙi = vi (4)
v̇i = (α− β|vi|2)vi + fri + fai + fmi + fηi (5)
where the first term in Eq (5) is a propulsion-damping term (Erdmann et al., 2000; Bazazi et al.,77
2011) that ensures individuals move at an average speed 〈si〉 = s0 =√
α/β per unit time and78
fηi is a random force. We can rewrite Eq (5) using polar coordinates to79
ṡi = (α− βs2i )si + fri,s + fei,s + fpi,s + fηi,s (6)
θ̇i =1
s i(fri,θ + fei,θ + fpi,θ + fηi,θ) (7)
The first and second equations above determine, respectively, the temporal evolution of80
speed (si) and direction of motion (as measured by the polar angle θi) of the individual i. The81
scalar force terms (f•i,s or f•i,θ) on the right hand side of Eqs. (6) and (7) are projections of82
the full force vectors (f•i) on unit radial (v̂i,s = cos θix̂ + sin θiŷ) and angular vectors (v̂i,θ =83
− sin θix̂+ cos θiŷ), i.e.,84
f•i,s = f•i · v̂i,s, f•i,θ = f•i · v̂i,θ (8)
The random force (fηi) is given by two independent Gaussian random processes, one in speed85
and the other in direction of motion86
fηi =√
2Dsξi,s(t)v̂i,s +√
2Dθξi,θ(t)v̂i,θ (9)
Here, ξXi denotes uncorrelated random numbers drawn from a normal distribution with zero87
mean and unit variance, i.e., 〈ξXi(t)〉 = 0, 〈ξXi(t)ξY j(t′)〉 = δkXY δkijδd(t− t′) where superscripts k88and d indicate that they represent Kronecker-, and Dirac-, delta functions, respectively (Arfken89
et al., 2005). The constant numbers Ds and Dθ denote the strengths of fluctuations in speed90
and angular noise, respectively. A reflecting condition is introduced in the speed dynamics in91
Eq (6) at si = 0 in order to ensure si ≥ 0.92
1.2 Boundary conditions93
We assume that the space is periodic, i.e., wrapped around, such that a particle leaving one end94
reappears at the opposite end with the same velocity. Thus, the spatial arena is topologically95
4
-
equivalent to a torus. Such a spatial structure is often employed as a computational technique96
to simulate large scale physical and biological systems so that the arena under consideration97
is a typical/representative patch in a much larger real system (Vicsek et al., 1995; Guttal and98
Couzin, 2010).99
In ecological context periodic boundary conditions (PBC) are an abstraction and it is impor-100
tant to consider alternative boundary conditions. In particular, one could argue that an open101
environment with no confinement (no boundary condition) is more appropriate for locust behav-102
ior. In such a scenario individuals may always spread out to reduce risks of cannibalism and thus103
pure avoidance will be always the optimal strategy. However, we first note that for sufficiently104
large spatial areas the influence of boundaries on locusts away from boundaries can be ignored.105
Secondly, due to the patchy nutrient distribution in their natural environment, locusts tend to106
locally aggregate thus effectively confining space available to them. Therefore, although we have107
chosen periodic boundary conditions as a convenient computational choice to maintain constant108
global density of locusts, it is also ecologically reasonable to assume that locusts do not over109
disperse due to patchiness of resources and are, thus, effectively in a confined environment.110
1.3 Numerical integration of equations of motion111
We assume that all individuals move at a constant speed of lb = s0 per unit time, i.e., this112
happens under conditions α, β → ∞ such that√
α/β = s0 = const. Then motion of an113
individual i is entirely described by the following angular stochastic differential equation (from114
Eq. 7)1115
θ̇i = fSi(θ) + σθξi,θ (10)
with fSi(θ) = (−fri,θ+fei,θ+fpi,θ)/lb and σθ =√2Dθ/lb. Numerically, this is solved by following116
Euler discretization scheme (Gardiner, 2003)117
θ(t + dt) = θi(t) + fSi dt+ ξi,θ√σ2dt (11)
This yields us with the new velocity vector v̂i(t + dt) = cos(θi)x̂ + sin(θi)ŷ and the position at118
the next time step is then evaluated by119
ri(t+ dt) = ri(t) + s0 v̂i(t+ dt) dt (12)
Our model is formulated in terms of stochastic differential equations, and the above algorithm120
has well known convergence properties; specifically, the stochastic difference equation (11) is121
1Note that we employ the capitalized subscript S to denote social in equations below where as the small letter
subscript s is used to denote speed direction, or its components, in Eqs (6-9)
5
-
accurate to the order O(√dt) whereas the deterministic difference equation (12) is accurate to122
the order O(dt) (Mannella, 2000; Gardiner, 2003). The algorithm performs a synchronous update123
of all particle positions and velocities for a microscopic numerical time-step dt " 1. Please note124that due to the numerical integration with the small time step, the changes in the state of125
an individual will be microscopic as well. Thus, we expect that there will be no qualitative126
difference between synchronous or asynchronous update, in contrast to other rule-based discrete127
time models or cellular automata often employed in ecological modeling, where the state of an128
individual may change significantly during one numerical step (Caron-Lormier et al., 2008).129
1.4 Initial conditions130
Each run starts with all individuals placed randomly in space with random orientations. For131
traits ωai and ωmi, we chose one of the following starting scenarios: (i) An uniform distribution in132
the range [−0.5, 0.5] (e.g., for simulations of Fig 1 in the main text). (ii) Each individual assigned133a random value from a Gaussian distribution with mean traits ω̄ai and ω̄mi and a relatively small134
standard deviation σω. For example, we employed this initial condition to compute fitness135
landscapes (see Appendix S4 as in Fig 2 of the main text. (iii) A delta-function distribution136
where all individuals are assigned a constant value such as ωai = −0.5 and ωmi = −0.5 (e.g., for137simulations of Fig 3 and 4 of the main text at density ρ = 0.2). (iv) An evolved state from a138
nearby parameter value, as employed in simulations for Fig 3 and 4 for densities greater than139
0.2 units.140
1.5 Costs, benefits, fitness and selection141
1.5.1 Cannibalistic costs and benefits142
An individual who is approached from behind (i.e., rear-end) within a distance lb pays a cost of143
cr units per time step whereas an approach from front leads to a cost of cf units per time step.144
If i is the focal individual interacting with j, then conditions for accruing cannibalistic costs can145
be written as146
Individual i pays a cost cr, if r̂ji · vi < 0 and |rji| < lb (13)
Individual i pays a cost cf , if r̂ji · vi > 0 and |rji| < lb (14)
Since the rear end of an individual is likely to be more vulnerable than the frontal part of an147
individual (Bazazi et al., 2008), we typically consider scenarios where cr > cf .148
6
-
If the individual moves towards other individual with his/her front facing the other, and is149
within a distance of lb, then he/she acquires a benefit of b units per time step. Mathematically150
this can be written as151
Individual i gets a benefit b, if r̂ji · vi > 0 and |rji| < lb (15)
The cost/benefit functions (Box 2, Eq. 4) corresponding to the above rules read:152
C = cr Θ(−r̂ji · vi) + cf Θ(r̂ji · vi) (16)
B = b Θ(r̂ji · vi). (17)
with Θ(x) being the unit step function (Heaviside function).153
We consider generalized and more complex forms of cost-benefit structures in Appendices S3154
and S8. We show that, to a large extent, these do not affect the conclusions presented in the155
main text.156
1.5.2 Fitness evaluatation157
In every run, starting from initial conditions, we let individuals follow equations of motion based158
on their phenotypes ωai and ωmi for ttr time units which corresponds to a transient period159
needed to achieve a stationary state. We then continue simulations for another tfit time units160
during which individuals accrue benefits (denoted by b̄i) and costs (c̄i) based on interactions with161
others. Fitness of an individual is then defined as fi = wb b̄i−(1−wb) c̄i where b̄i =∑ttr+tfit
t=ttr bi(t),162
c̄i =∑ttr+tfit
t=ttr (cri(t) + cfi(t)) and wb is a measure of relative importance of benefits of nutrients163
obtained through cannibalizing others to the costs of being cannibalized by others. At every164
generation, to obtain better statistics, we average fitness for each individual by repeating this165
process for nr number of runs all starting with different starting conditions.166
1.5.3 Selection procedure167
The two evolvable traits, the response to the approach ωai, and moving away of others, ωmi, take168
continuous values that can be positive or negative. For computational tractability, we constrain169
them to the range [−0.5, 0.5]. Depending on the value of their traits, individuals and groups can170exhibit various forms of motion, including solitary random walk, avoidance behavior, unpolarized171
swarms and polarized mobile bands (see Appendix S2). Through further computer simulations,172
by considering a wider range of allowed phenotypic values ([−1.0, 1.0]), we confirm that this173restriction does not alter qualitative nature of the results presented (see Appendix S4).174
7
-
To implement selection at the end of every generation, we use Roulette-wheel algorithm175
where each individual reproduces asexually with a probability that is proportional to its relative176
fitness value (Maynard Smith, 1982). Parents pass on their traits (ωai and ωmi) to their offspring,177
but offspring may slightly differ from them due to small mutations (in each of the traits) which178
are Gaussian random numbers with mean zero and standard deviation σµ. For computational179
simplicity, we keep the number of individuals constant across different generations and assume180
that generations do not overlap. This procedure is continued until a stationary distribution of181
phenotypes is obtained.182
1.5.4 Evolutionary stable states and their robustness183
We refer the reader to SI Appendix C in Guttal and Couzin, 2010 (Guttal and Couzin, 2010)184
where we discuss computational stability analysis of evolved states in detail. In short, we note185
that multiple evolutionary stable states (ESSt) may exist for a given parameter value (e.g., for a186
given density and cost). In such instances, we define a ‘robust evolutionary stable state’ (rESSt)187
as one that is restored by selection after the introduction of a rare mutant from another ESSt,188
or more generally, a rare mutant that is far from the resident population’s phenotype.189
As we show in Guttal and Couzin, 2010, an alternative way of obtaining rEESt is to begin190
an evolutionary simulation with phenotypes drawn from uniform random distribution from the191
phenotypic space of interest (here, in the range [−0.5, 0.5]). Such an initialization effectively in-192troduces competition among a range of phenotypes, and their mixture strategies. This approach193
potentially allows us to find a robust evolutionary stable state among multiple stable states (if194
any). Furthermore, it can reduce the computational time needed to reach a stationary state. We195
use this initial condition to obtain results in Fig 1. For Fig 3 and 4, we obtain ESSt by employing196
ESSt of a nearby parameter value (such as density) as the starting phenotype distribution.197
1.6 Polarization198
The polarization, p, of a population of N individuals with their orientation vectors given by v̂i199
is defined by (Vicsek et al., 1995)200
p =1
N|
N∑
i=1
v̂i| (18)
where |a| denotes the length of any vector a. By definition, the polarization p ∈ [0, 1] with a201value of 0 indicating disordered motion whereas a value of 1 indicates a perfectly ordered and202
synchronous motion of the whole population.203
8
-
1.7 Table: Model parameters and their typical values204
Table S1: Summary of model parameters
Quantity Description Values Units/Dimensions
lb Zone of repulsion, or size of a body length (BL) 1 unit LBL−1
ls Zone of local social interactions 5 ∗ lb LBL−1
ρ Population density 0.1 to 2.0 Individuals per detection area
N Population size 256 or 16, 384 Individuals
l Size of space in each dimension ls√
N/ρ L
s0 Speed of agents lb per unit time L(BLT )−1
Dθ Randomness/error in motion 0.02 rad2 T−1
Ds Randomness/error in motion 0 -
dt Discrete time step 0.02 of a unit T
ωr Strength of repulsive force 2 s20 T−1
ωai Response to approaching individuals i Evolvable -
ωmi Response to moving away individuals i Evolvable -
cr Cost of cannibalism at the rear end of the body 100 F
cf Cost of cannibalism at the front of the body 10 F
b Benefits of cannibalism 20 F
wb Relative weight of benefits to costs 0.0 to 1.0 -
fi Fitness of an individual fi = wb b− (1− wb) c Fτtr Transient time from starting conditions 100 time units T
τfit Time interval during which fitness is computed 500 time units T
nr Number of realizations per generation 30 -
σµ Strength of mutation in ωai and ωmi 0.01 -
Notations are: BL = Body length, L = length, T = time, F = unit of fitness.
9
-
Appendix S2: Different macroscopic states allowed in the205
model206
0
50
100
150
200
250
300
350
0 50 100 150 200 250 300 350
(a) Avoidance behavior (ωai = −0.5;ωmi =−0.5)
0
50
100
150
200
250
300
350
0 50 100 150 200 250 300 350
(b) Polarized swarms (ωai = −0.5;ωmi =0.5)
0
50
100
150
200
250
300
350
0 50 100 150 200 250 300 350
(c) Head-to-head attraction (ωai =
0.5;ωmi = −0.5)
0
50
100
150
200
250
300
350
0 50 100 150 200 250 300 350
(d) Unpolarized aggregations (ωai =
0.5;ωmi = 0.5)
0
50
100
150
200
250
300
350
0 50 100 150 200 250 300 350
(e) Solitary correlated random walks (ωai =
0.0;ωmi = 0.0)
Figure S1: Parameters: N = 256 and ρ = 0.836 (note that this is close to the threshold density
at which gregariousness becomes an ESS, from Fig 1A of the main text). All parameters, unless
stated otherwise above, are as in the Table S1.
10
-
Appendix S3: Robustness and generality of results (with207
costs only)208
In this section we analyze the robustness of our results with respect to (i) different choices of the209
model parameters, (ii) a modified model where individual speeds are variable and (iii) different210
cost functions.211
3.1 Model parameters212
We have verified that the qualitative nature of results remain unaltered for the different choice213
of the parameters summarized in Table S1. More specifically, in addition to those listed in Table214
S1, we have considered different parameter values, such as (i) τtr = 50 and 200 time units, (ii)215
τfit = 200 and 1000 time units, (iii) the allowed range of the evolvable traits [−1.0, 1.0]2, (iv)216strength of mutations for both traits, σµ = 0.02. (v) nr = 200.217
Quantitative differences, however, may occur. For example, an increase in the number of218
realizations per generation (nr), or of the time interval during which fitness is computed (τfit),219
improves the statistics of fitness calculation thus providing a more accurate quantification of220
the critical threshold at which behavioral phase-change occurs. This improvement, however, is221
bounded by the intrinsic stochasticity of the selection process determined by the shape of fitness222
landscape (see Appendix S4) and our choice of strength of mutations. Moreover, this will come223
at the cost of increased computational time.224
3.2 Variable speed model225
Potential issues with a constant speed model: So far we have considered the constant speed226
model (but the velocity does vary because the individuals turn according to force equations of227
Appendix S1 in response to other nearby individuals). It may be argued that when speeds of228
all individuals are equal, no individual can chase, attack and consume a conspecific. In fact,229
one may naively presume that individuals can not get closer to other individuals unless they are230
headed towards each other.231
First, we note that it is not possible to capture all details of pursuit, capture and consumption232
of conspecifics as it happens in the real world in a simple mathematical/computational model.233
Our intention is only to capture evolutionary stable strategies of locust movement and local234
2Note that this typically requires much larger nr (or τfit) thus much longer simulation times in particular at
low densities. The reason is the increased effectiveness of avoidance to reduce contacts, thus costs of cannibalism,
due to stronger repulsive response to approaching individuals.
11
-
interactions among them under the threat of cannibalism. Here, we modeled the threat of235
cannibalism by a cost to an individual when others contact its rear end, which has been shown236
in experiments to be most vulnerable part of locusts body (Bazazi et al., 2008).237
Second, we emphasize that it is indeed possible for an individual i to get closer to other238
individual j when ωmi > 0 and |ωmi| > |ωaj|, thus representing cannibalistic chase. More239generally, a positive ωmi implies an attraction to individuals who are moving away and therefore240
this results, on an average, to decreased distance between conspecifics leading to formation of241
groups, as has already been shown in our earlier work (Romanczuk et al., 2009).242
However, to ensure that our results are not sensitive to specific assumptions, we did consider243
variations of this simple assumption of constant speed (also see Figure S3 in Appendix S4).244
Results of variable speed model: We tested whether our results continue to hold if we make245
the model more realistic by allowing individuals to move with variable speed. To do so, we kept246
values α and β finite (α = 1 per unit time, β = 1 unit time per length square) and assumed a247
relative low value of Ds (= 0.02) so that the speed fluctuations are not too large. The ability of248
individuals to change their speed in response to their neighbors allows a more effective behavioral249
response, e.g., if individuals are able not only to turn away, but also to slow down, or speed250
up, to avoid contacts with conspecifics, the pure repulsion strategy is more effective at lower251
densities. Thus, we predict, and confirm via numerical simulations, that the critical density (ρc)252
at which ESS of locusts transition from a solitarious to a gregarious behavior shifts to higher253
values.254
Also see Figure S3 in Appendix D.3 to see how the qualitative feature of fitness landscape255
remains similar to that of constant speed model.256
3.3 Generalized cost functions257
Here we consider different scenarios where only costs, but no benefits, of cannibalistic interactions258
are important for individual fitness.259
3.3.1 Motivating quantification of cannibalistic costs260
We begin by developing a generalized version of cost functions employed in the main text and261
described in Appendix S1. As before, we assume here that the costs of cannibalistic interactions262
occur via contacts defined as those occurring within a distance of lb of one other. In general,263
costs may depend on the relative position and orientation of the interacting individuals. For264
simplicity, we assume that costs accrued by a focal individual i interacting with other individual265
j depend only on its orientation (v̂i) and the relative position vector (r̂ji) but not the orientation266
12
-
of the other individual. We denote the cost function by C(φi) where φi is the angle between267
these two vectors and is given by268
φi = acos (r̂ji · v̂i) (19)
Note that an angle φi = 0◦ corresponds to a direct frontal contact to the focal individual ( i.e., the269
other individual j is directly ahead of i) whereas φi = 180◦ corresponds to a perfect rear contact270
(i.e., j is directly behind the focal individual i).271
Empirical observations suggest that vulnerability of individuals may be highest when attacks272
happen to rear-end of an individual (Bazazi et al., 2008). Therefore, we can consider C(φ) to273
be a monotonously increasing function of φi. However, there are infinitely many such possible274
functions. Therefore, we introduce two plausible ‘extreme’ forms: a perfectly linear function275
Cl(φi) and a maximally nonlinear heaviside step function Cn(φi) (defined below). We expect276
that if our results do not depend on the particular choice of C(φi) it should definitely not depend277
on whether we take a linear or a maximally nonlinear function.278
3.3.2 Defining a perfectly linear and maximally nonlinear cost functions279
With the above motivation, we define two φi-dependencies of cannibalistic costs280
Cn(φi) = cf + (cr − cf)Θ(φi − 90◦), (20)
Cl(φi) = cf + (cr − cf)φi
180◦, (21)
where cf , cf ≥ 0 and Θ(φi − 90◦) is a heaviside step function defined as281
Θ(φi − 90◦) =
1 if φi > 90
0 otherwise.(22)
The first function Cn(φi) in Eq (20) gives a step-like, highly nonlinear, dependence of costs282
on the angle φi. The costs assume a constant value cf from frontal contacts (0◦ ≤ φ < 90◦) and283cr from rear-end contacts (90◦ ≤ φ ≤ 180◦). Please note that this highly nonlinear cost function284Cl(φ) is identical to the cost function employed for simulations and results presented in the main285
text, in the absence of benefits (wb = 0), with cr = 100.0 and cf = 10.0.286
At the other extreme we define a second cost function Cl(φi) in Eq (21) that increases linearly287
with φi from the value cf for a direct frontal contact (φi = 0◦) to cr for a perfect rear-end contact288
(φi = 180◦).289
For both cost functions, the special case of cr = cf corresponds to C(φ) = const., where the290
costs are isotropic or independent on the relative angle φ. As only the relative costs are important291
13
-
for the evolutionary algorithm, we may quantify the difference between the costs of contacts to292
the front and back, or the anisotropy of the cost function, by the ratio CR = cf/cr. Here,293
CR = 1 corresponds to isotropic costs (i.e., individual is equally vulnerable to cannibalism from294
all sides) and CR = 0 corresponds to a maximal anisotropy with C(0◦) = 0 and C(180◦) = cr295
(i.e., individual is maximally vulnerable at the rear end).296
3.3.3 Cost on the side297
For crickets, it has been demonstrated that the costs of cannibalism may be maximum on their298
sides (Bazazi et al., 2010). We define a corresponding cost function, Cs, by299
Cs(φ) = c0 + (cm − c0)Θ(φ− 45)Θ(135− φ) (23)
which means that an individual accrues maximum costs of cm when other individuals contact300
on the side whereas its minimum of c0 for frontal and rear contacts.301
3.4 Fitness computation302
We can formally calculate individuals accrue costs, as we described in Appendix S1, by the303
following differential equation304
dcidt
= C(φ)Θ(|rji|− lb), (24)
and an initial condition ci(t = ttr) = 0 ∀ i with the heaviside step function (Θ(|rji| − lb)) deter-305mining whether a contact, defined via |rji| < lb, takes place. The fitness of an individual for a306generation is then obtained by fi = −
∫ ttr+tfitt=ttr
ct(t)dt.307
3.4.1 ESS exhibits robust features irrespective of cost functions chosen308
Systematic evolutionary numerical simulations yield three robust results irrespective on the ratio309
CR and the type of the cost function (linear vs. step-like vs. sidewards):310
1. The ESS converges to unimodal phenotype population distributed around a average phe-311
notype value ω̄ai and ω̄mi.312
2. At all densities, the value of the individual response to approach ωai converges towards the313
maximally allowed repulsion ωai # ω(min)ai = −0.5.314
3. At a critical density of individuals ρc the optimal response to moving away individuals315
exhibits a sharp transition from repulsion (ωmi < 0) to attraction (ωmi > 0).316
14
-
These generic features enable us to conclude that our claim, that the costs of cannibalism alone317
can drive the evolution of behavioral polyphenism in locusts, is robust to modifications in the318
model and various parameters values.319
15
-
Appendix S4: Fitness landscapes, adaptive significance320
and their robustness to different cost func-321
tions and a variable speed model322
4.1 Computing fitness landscape and adaptive significance323
In Fig 1A of the main text we show that the ESS is a density-dependent transition from avoidance324
(ωai < 0 and ωmi < 0) to gregarious behavior (ωai < 0 and ωmi > 0). We then discussed how325
this density-dependent strategy could be an adaptation to maximize relative fitness, or minimize326
the costs of cannibalism. This requires a computation of fitness landscape that we presented in327
Fig 2 of the main text and the method is described below.328
We define fitness landscape by the average fitness of an individual in a ‘unimodal population’329
as a function of density, and two mean traits (ω̄ai and ω̄mi). We recall that in an unimodal330
population, the distribution of two traits is a Gaussian distribution with mean response to331
approaching and moving away individuals given by ω̄ai and ω̄mi, respectively. The spread (or332
the standard deviation) of the distribution, σω, is relatively narrow/small. Our choice for this333
distribution is motivated by the fact that ESS of Fig 1A is unimodal for all densities. As shown334
in the previous appendix, this holds for different parameter values and cost functions.335
The fitness of the population depends strongly on the density of individuals; a higher density336
will always correspond to a higher average contact rate, thus to lower fitness in comparison to337
a lower density population. To eliminate this trivial bias, and to identify the optimal strategies338
for different cost functions and different densities, we introduce a relative fitness Frel(ω̄ai, ω̄mi, ρ)339
which is normalized by the minimal and maximal effective fitness at a given fixed density340
Frel(ωai,ωmi, ρ) =f̄(ωai,ωmi, ρ∗)−min(f̄(ωai,ωmi, ρ∗))
max(f̄(ωai,ωmi, ρ∗))−min(f̄(ωai,ωmi, ρ∗))
∣
∣
∣
∣
ρ∗=ρ
(25)
The relative fitness Frel is thus defined on the interval [0, 1]. The value Frel = 1 corresponds341
to the strategy with the maximal fitness for a given density ρ; at the other extreme, a value of342
Frel = 0 corresponds to the strategy with the minimal fitness at that density ρ.343
The fitness landscape as defined above is a function of three parameters, ρ, ω̄ai and ω̄mi.344
Therefore, its full visualization that requires a four dimensional plot. To simplify this, we note345
that the evolved value of the response to approach is given by ωai ≈ −0.5, i.e., maximal repulsion346to, or escape from, approaching individuals, at all densities. Even when nutritional benefits of347
cannibalism are included, and exceed the costs of cannibalism, the evolved ωai does not exhibit348
density-dependence (Fig 4A of the main text). Thus, the response to moving away individuals349
16
-
Alinear cost function, CR=0.0
Res
pons
e to
mov
ing
away
(ωm
i)
Density (individuals per detection area)
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
Blinear cost function, CR=0.5
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
Clinear cost function, CR=1.0
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
Dstep cost function, CR=0.0
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
Estep cost function, CR=0.5
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
Fstep cost function, CR=1.0
0.2 0.4 0.6 0.8−0.5
−0.25
0
0.25
0.5
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure S2: Relative fitness landscape (Frel(ω̄mi, ρ)) for linear and step-like cost functions and
different values of the front/back cost ratio CR = cf/cr. Linear cost function: (A) CR = 0.0,
(B) CR = 0.5, (C) CR = 1.0; Step-like cost function: (D) CR = 0.0, (E) CR = 0.5, (F).
CR = 1.0. Other parameters: N = 256 and see the Table S1 in Appendix S1.
(ωmi) is the relevant evolvable trait. Hence, we reduce the fitness landscape to three dimensions350
by setting ωai = ω(min)ai = −0.5 for all i. Corresponding results are then shown in Fig 2A of the351
main text with x and y axes being ρ and ω̄mi and the relative fitness is captured in the third352
dimension by a gradient of colors.353
4.2 Fitness landscapes are insensitive to details of cost functions cho-354
sen355
The fitness landscapes for the two different cost function types and different values of the ratio356
CR yields qualitatively the