Calibration of Under Water Neutrino Telescope ANTARES
54
Calibration of Under Water Neutrino Telescope ANTARES Garabed HALLADJIAN October 15 th , 2008 GDR Neutrino, CPPM, Marseille
description
Calibration of Under Water Neutrino Telescope ANTARES. Garabed HALLADJIAN October 15 th , 2008 GDR Neutrino, CPPM, Marseille. Presentation plan. Introduction Time calibration Dark room calibration In situ calibration Efficiency control Acoustic positioning system Conclusion. - PowerPoint PPT Presentation
Transcript of Calibration of Under Water Neutrino Telescope ANTARES

Calibration of Under Water Neutrino Telescope ANTARES
Garabed HALLADJIANOctober 15th, 2008
GDR Neutrino, CPPM, Marseille

15/10/2008 GDR Neutrino - G. Halladjian 2
Presentation plan
• Introduction• Time calibration
– Dark room calibration– In situ calibration
• Efficiency control• Acoustic positioning system• Conclusion

15/10/2008 GDR Neutrino - G. Halladjian 3
Introduction
Good neutrino astronomy=
Good angular resolution neutrino telescope

15/10/2008 GDR Neutrino - G. Halladjian 4
Introduction
Good neutrino astronomy=
Good angular resolution neutrino telescope=
Good calibration

15/10/2008 GDR Neutrino - G. Halladjian 5
Detection principle
neutrino
muon
interaction
Cherenkov light
earth
water
3D OMnetwork
neutrino

15/10/2008 GDR Neutrino - G. Halladjian 6
Detection principle
neutrino
muon
interaction
Cherenkov light
earth
water
3D OMnetwork
1.Time2.Positions3.Charge

15/10/2008 GDR Neutrino - G. Halladjian 7
ANTARES ν-telescope
2475m
450m
70m
12 lines25 stories
3 OM

15/10/2008 GDR Neutrino - G. Halladjian 8
Storey components
Hydrophone:acoustic positioning
Optical Module:10”
Hamamatsu PMT
in 17” glass sphere
(TTS 1.3 ns)photon
detectionLocal Control Module
(in Ti cylinder):Front-end ASIC,
DAQ/SC, DWDM, Clock, tilt/compass, power distribution…
Optical Beaconwith blue LEDs:timing calibration

15/10/2008 GDR Neutrino - G. Halladjian 9
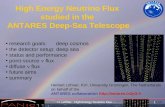
Angular resolution
Angular resolution better than 0.3° above a few TeV, limited by:
• Light scattering + chromatic dispersion in sea water: σ ~ 1.0 ns
• TTS in photomultipliers: σ ~ 1.3 ns
• Electronics + time calibration: σ < 0.5 ns
• OM position reconstruction: σ < 10 cm (↔ σ < 0.5 ns)
dominated by reconstruction
rec− true
rec− dominated
by kinematics

15/10/2008 GDR Neutrino - G. Halladjian 10
Time calibration
• Internal clock calibration system
• Optical Beacons• K40 decay• Internal Optical
Module LEDs• …

15/10/2008 GDR Neutrino - G. Halladjian 11
Local Control ModulesLCM clock boards
Link Cables200-500 m fibre
START STOPTDC
STARTSTOPGPS E/O/E
TXRX
Main Electro-Optical Cable 40 km
from shore to Junction BoxSingle bidirectional fibre
(1534 nm / 1549 nm)
Junction Box116 passive splitter
String Control ModuleBIDI modules
O/E and E/O convertersby sectors (5 storeys)
On-shore Station
Clock distribution

15/10/2008 GDR Neutrino - G. Halladjian 12
Transit time measuring of principal EO cable
In situ measurementsof clock delay

15/10/2008 GDR Neutrino - G. Halladjian 13
σ ~ 9 ps Line 4, storey 16 Line 12, storey 8σ ~ 11 ps
Clock phase in situmeasurements
Individual relative delay measuring of clock for each storey

15/10/2008 GDR Neutrino - G. Halladjian 14
OM time calibration
Dark room calibration In situ calibration

15/10/2008 GDR Neutrino - G. Halladjian 15
Optical fibers
t0
t1t2
t3
Optical Splitter
Laser 532 nm
Attenuator
Filter
Dark room calibration
Apparatus check !

15/10/2008 GDR Neutrino - G. Halladjian 16
OMs calibration in dark room
t (ns)

15/10/2008 GDR Neutrino - G. Halladjian 17
OMs calibration in dark room
t (ns)

15/10/2008 GDR Neutrino - G. Halladjian 18
Optical beacon
Optical Beaconwith blue LEDs:timing calibration
• 36 LEDs• λ = 470 nm• Rise time ~ 1.9 ns• FWHN ~ 5 ns

15/10/2008 GDR Neutrino - G. Halladjian 19
Led OpticalBeacon:
32 blue LEDssynchronisedflash < 0.5 ns
Timing resolution of electronics
<0.5ns
Time difference between signalsfrom 2 OMs in a storey
Time in OMs relative to reference PMT in OB
MILOM
15 m
Intense light flash:PMT TTS
contributionis negligible
Optical beacon

15/10/2008 GDR Neutrino - G. Halladjian 20
Line 1 time calibrationwith MILOM LED beacon
MILOM
~70 m
~150 m = 0.7 ns
= 2.6 ns
t [ns]
"horizontal"
"diagonal"
larger distance
• less intensity
• light scattering
All timing measurements in good agreement with expectations
Line 1

15/10/2008 GDR Neutrino - G. Halladjian 21
Light attenuation measuredby optical LED beacons

15/10/2008 GDR Neutrino - G. Halladjian 22
Light attenuation measuredby optical LED beacons

15/10/2008 GDR Neutrino - G. Halladjian 23
Optical
fibresLaser
On shorelaser
system
In seaLED beacon
system
LED beacon
RMS 0.74ns
RMS 0.60ns
Time calibration

15/10/2008 GDR Neutrino - G. Halladjian 24
In situ calibration with K40
40K40Ca
e-
Cherenkovphotons
Gaussian peak on coincidence plot
Peak time offset : Cross check of time calibration
Integral under peak = rate of correlated
coincidences
High precision (~5%) monitoring of OM efficiencies
MC prediction =13 ± 4 Hz

15/10/2008 GDR Neutrino - G. Halladjian 25
Coincidence on 2 storeys
2 pairs of coincidences in adjacent storeys
±20 ns in same storey

15/10/2008 GDR Neutrino - G. Halladjian 26
Calibration with down-goingmuons
2 pairs of coincidences in adjacent storeys±100 ns between storey
Preliminary

15/10/2008 GDR Neutrino - G. Halladjian 27
Relative positioning of detector
Z(m)
r(m)
Example forSea currentV = 25 cm/srmax = 22 m

15/10/2008 GDR Neutrino - G. Halladjian 28
AutonomousTransponder
TransmitterReceiver
5 + 1 Receiver / line
Acoustic positioning system

15/10/2008 GDR Neutrino - G. Halladjian 29
Acoustic positioning system
• Frequency = 40 – 60 kHz• Accuracy < 10 cm• Acoustic cycle: Successive emission of
each BSS in each second• Simultaneous measure of acoustic
propagation times between each transmitter and all hydrophones
• 3D position determination of each hydrophone using all RxTxRx distances of acoustic cycle (global positioning each 2 minutes)

15/10/2008 GDR Neutrino - G. Halladjian 30
Acoustic components
After current correction
Transmitter / Receiver
Pressure sensor
Celerimeter
CCTD
Receiver
Current velocityPressureE. ConductivityTemperature

15/10/2008 GDR Neutrino - G. Halladjian 31
Sound Velocity
00 0171.0, zztVtzV

15/10/2008 GDR Neutrino - G. Halladjian 32
Acoustic measurementsof fixed distances
After current correction
L2→L3 L3→L2 average
5 mm

15/10/2008 GDR Neutrino - G. Halladjian 33
Acoustic measurementsof fixed distances
After current correction
L2→L3 L3→L2 average
5 mm
+
+
=
=

15/10/2008 GDR Neutrino - G. Halladjian 34
Acoustic measurementsof fixed distances
After current correction
L2→L3 L3→L2 average
5 mm

15/10/2008 GDR Neutrino - G. Halladjian 35
Hydrophone : Ligne 4 étage 25
Emission RxTx ligne 5Emission transpondeur
Acoustic measurementsof hydrophone distances

15/10/2008 GDR Neutrino - G. Halladjian 36
Acoustic triangulationof hydrophones

15/10/2008 GDR Neutrino - G. Halladjian 37
Acoustic triangulationof hydrophones

15/10/2008 GDR Neutrino - G. Halladjian 38
Radial displacement
Acoustic triangulationof hydrophones

15/10/2008 GDR Neutrino - G. Halladjian 39
Storey 1Storey 8
Storey 14Storey 20Storey 25
Radial displacement
Acoustic triangulationof hydrophones

15/10/2008 GDR Neutrino - G. Halladjian 40
Radial displacement
Radial displacement

15/10/2008 GDR Neutrino - G. Halladjian 41
BSS absolute positions
• BSS position are measured by the boat• Boat position are measured by satellites
DGPS
LF LBL (σx σy ~ 1m)

15/10/2008 GDR Neutrino - G. Halladjian 42
Before triangulation

15/10/2008 GDR Neutrino - G. Halladjian 43
Before triangulation
7 m

15/10/2008 GDR Neutrino - G. Halladjian 44
BSS position uncertainty
Before triangulation

15/10/2008 GDR Neutrino - G. Halladjian 45
BSS position uncertainty
Before triangulation

15/10/2008 GDR Neutrino - G. Halladjian 46
BSS position uncertainty
Before triangulation

15/10/2008 GDR Neutrino - G. Halladjian 47
BSS position uncertainty
Before triangulation

15/10/2008 GDR Neutrino - G. Halladjian 48
BSS absolute positions
Distances between BSSs (acoustic distances) decrease the uncertainty on BSS positions.
DGPS
HF

15/10/2008 GDR Neutrino - G. Halladjian 49
BSS position uncertainty
Before triangulation After triangulation

15/10/2008 GDR Neutrino - G. Halladjian 50
BSS position uncertainty
Before triangulation After triangulation

15/10/2008 GDR Neutrino - G. Halladjian 51
Before triangulation
7 m

15/10/2008 GDR Neutrino - G. Halladjian 52
After triangulation
7 m

15/10/2008 GDR Neutrino - G. Halladjian 53
Angular Error due to BSS
σ (horizontal) = 0.13 degree
σ (vertical) = 0.02 degree

15/10/2008 GDR Neutrino - G. Halladjian 54
Conclusion
• ANTARES is complete and working very well• Detector calibration is permanently controlled in
situ• Calibration performance agree with expectation:
– Time uncertainty < 0.5 ns– Position uncertainty < 10 cm
• ANTARES should reach its excellent angular resolution ~ 0.3o