Calibration of international capacity models for dual lane ...
Bangkok, Thailand, 5-13 February 2018
WMO/ASEAN Training Workshop on Weather Radar Data Quality and Standardization
Japan Meteorological Agency
Calibration of dual-pol data
7 February 2018
Hiroshi Yamauchi Observation Department
Japan Meteorological Agency
Bangkok, Thailand, 5-13 February 2018
WMO/ASEAN Training Workshop on Weather Radar Data Quality and Standardization
Japan Meteorological Agency
• Required accuracy for dual-pol
• Calibration of Z (absolute calibration)
• Calibration of Zdr and Fdp
• rhv correction to mitigate effect of noise
Contents

Required accuracy for dual-pol
■CIMO GUIDE
3
■NEXRAD (Ryzhkov et al. 2005)
■NOAA/National Weather Service Radar Functional Requirements (2015)
Error = random error + systematic error (bias)
Bias of Z ±1 (dB)
Bias of ZDR ±0.1~0.2 (dB) very high accuracy!!
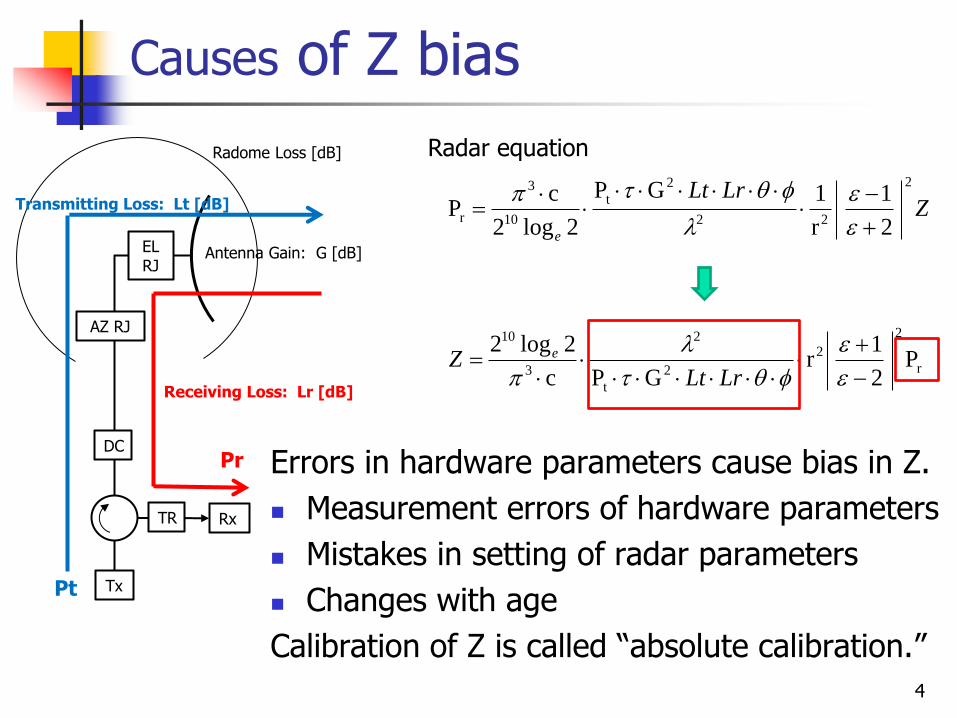
Causes of Z bias
4
Tx
AZ RJ
EL RJ
Rx TR
Transmitting Loss: Lt [dB]
Antenna Gain: G [dB]
DC
Radome Loss [dB]
Receiving Loss: Lr [dB]
ZLrLt
e
2
22
2
t
10
3
r 2
1
r
1GP
2log2
c P
Radar equation
r
2
2
2
t
2
3
10
P 2
1 r
GPc
2log2
LrLtZ e
Errors in hardware parameters cause bias in Z.
Measurement errors of hardware parameters
Mistakes in setting of radar parameters
Changes with age
Calibration of Z is called “absolute calibration.”
Pt
Pr
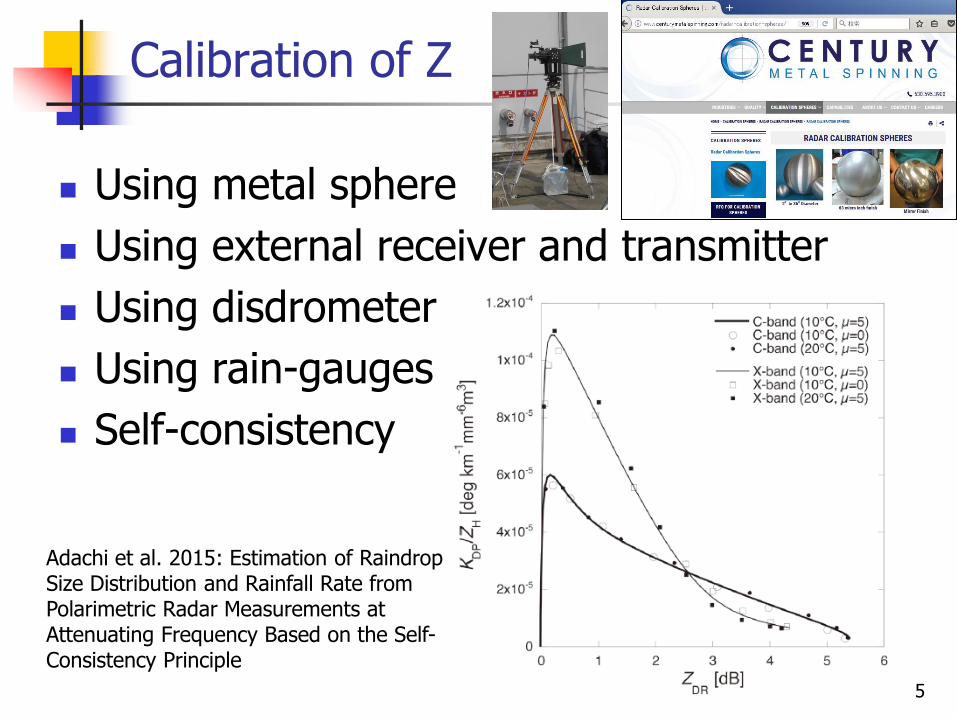
Calibration of Z
Using metal sphere
Using external receiver and transmitter
Using disdrometer
Using rain-gauges
Self-consistency
5
Adachi et al. 2015: Estimation of Raindrop Size Distribution and Rainfall Rate from Polarimetric Radar Measurements at Attenuating Frequency Based on the Self-Consistency Principle
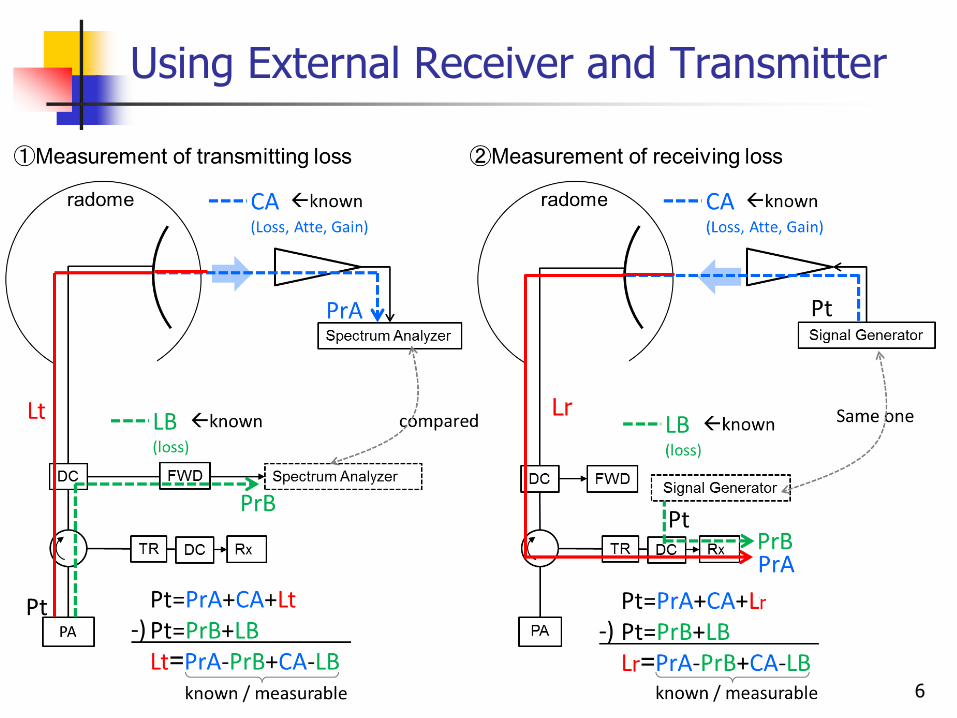
Using External Receiver and Transmitter
6
r
r
Lr

Using Disdrometer
7 Courtesy of Mr. Umehara
radar Disdrometer
Both radar and disdrometer observe Z
time Re
fle
ctivity Z
[ d
BZ
]
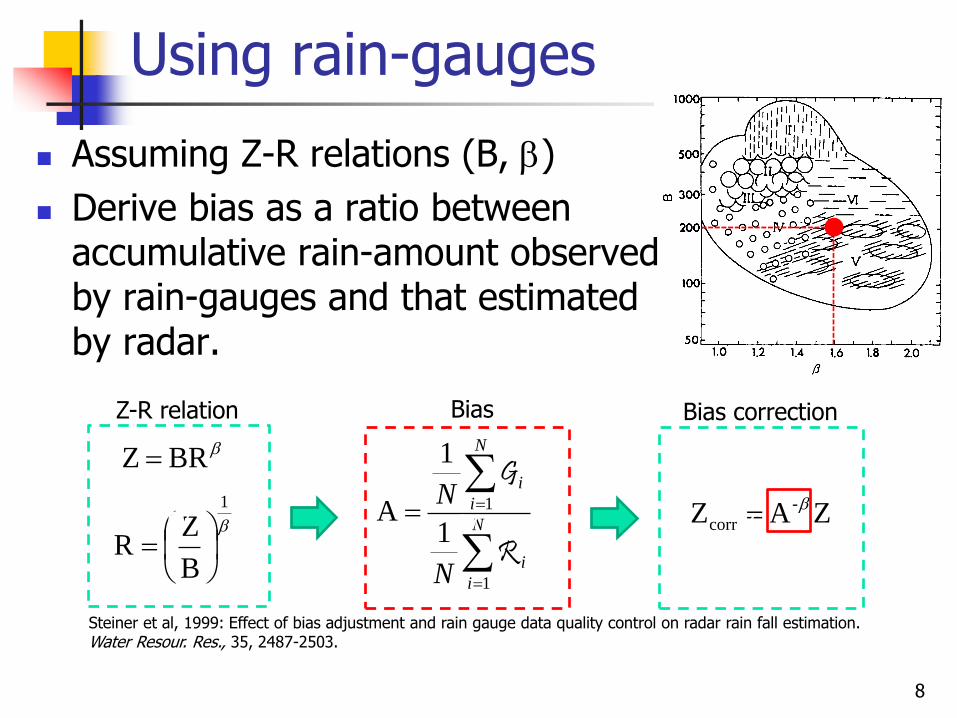
Using rain-gauges
8
Assuming Z-R relations (B, b)
Derive bias as a ratio between accumulative rain-amount observed by rain-gauges and that estimated by radar.
N
i
i
N
i
i
N
N
1
1
1
1
A
R
GbBR Z
ZA Z -
corr
bb
1
B
Z R
cv cv cv
Bias Z-R relation
Steiner et al, 1999: Effect of bias adjustment and rain gauge data quality control on radar rain fall estimation. Water Resour. Res., 35, 2487-2503.
Bias correction
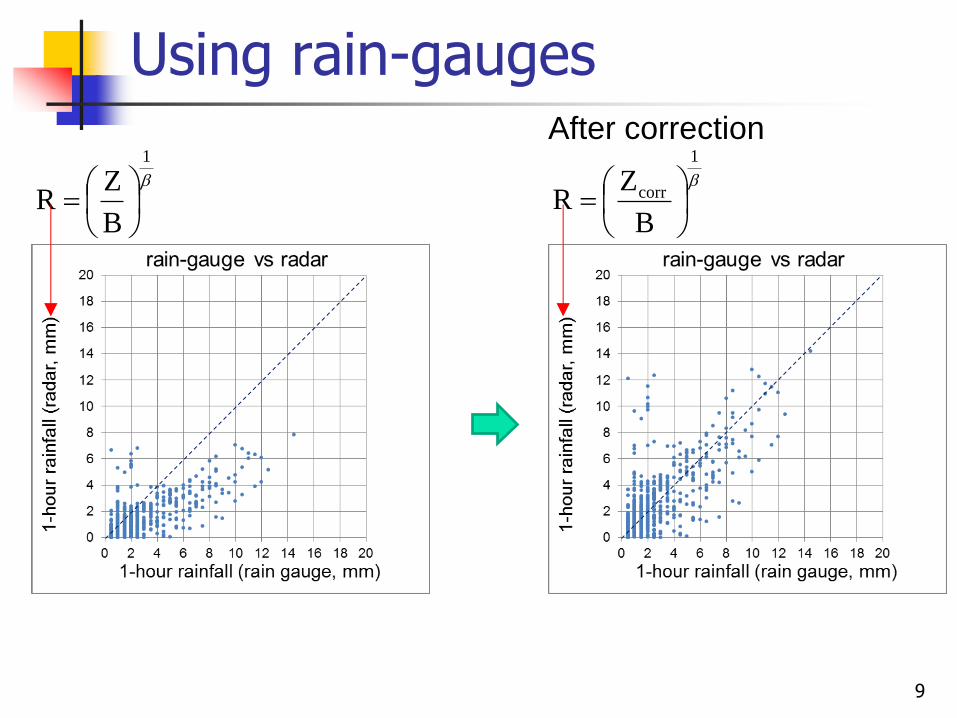
Using rain-gauges
9
b
1
B
Z R
b
1
corr
B
Z R
After correction
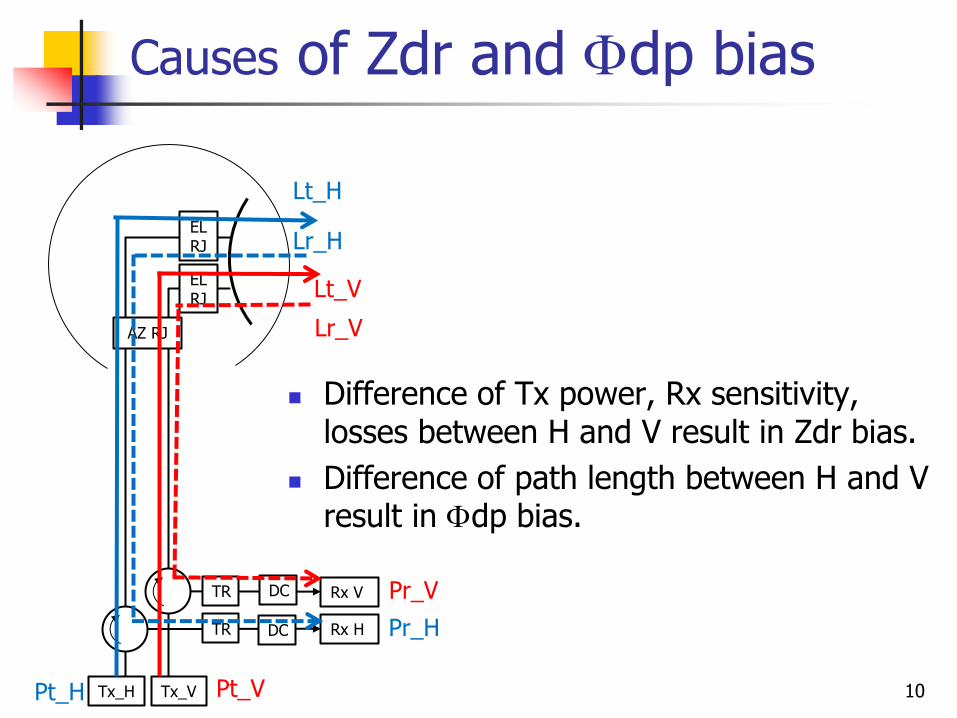
Causes of Zdr and Fdp bias
10
Difference of Tx power, Rx sensitivity, losses between H and V result in Zdr bias.
Difference of path length between H and V result in Fdp bias.
Pt_H Tx_H Tx_V
AZ RJ
EL RJ
EL RJ
Rx V
Rx H
TR
TR
Lt_H
DC
DC
Lr_H
Lt_V
Lr_V
Pr_H
Pr_V
Pt_V

Using metal sphere
Bird-bath scan (PPI scan at el=90°)
Using drizzle or light rain
Using solar signals (only for Receiver bias)
11
Calibration of Zdr and Fdp
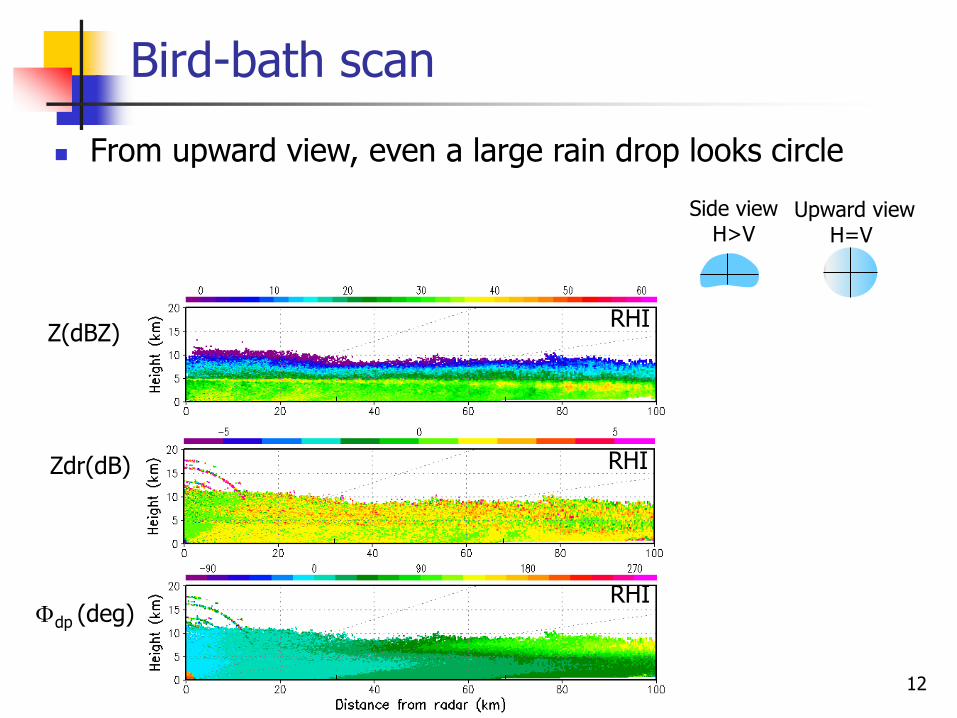
Fdp (deg)
Zdr(dB)
Z(dBZ)
Bird-bath scan
From upward view, even a large rain drop looks circle
RHI
RHI
RHI
12
Side view H>V
Upward view H=V
High Gain: -0.2deg Low Gain: -0.2deg
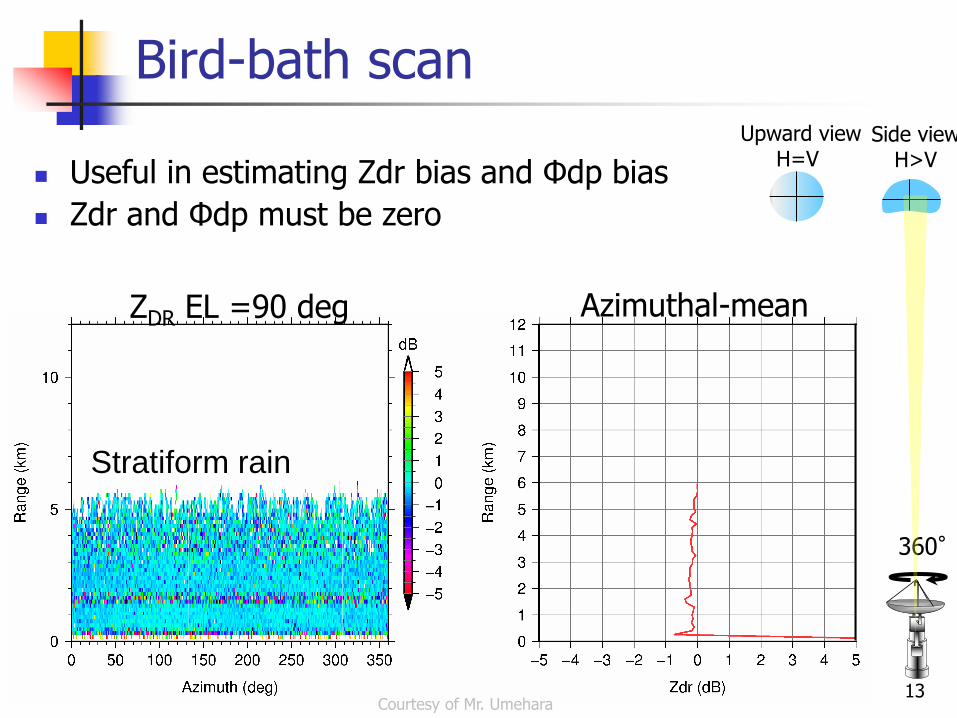
Stratiform rain
ZDR EL =90 deg Azimuthal-mean
Bird-bath scan
Useful in estimating Zdr bias and Φdp bias
Zdr and Φdp must be zero
Side view H>V
Upward view H=V
360°
13 Courtesy of Mr. Umehara
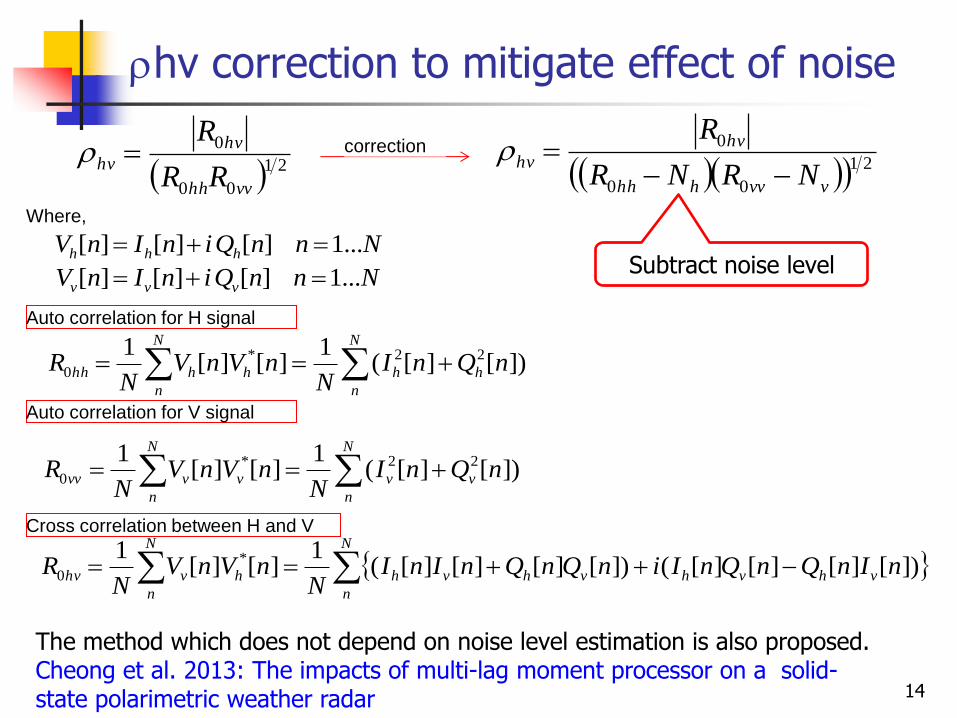
rhv correction to mitigate effect of noise
14
21
00
0
vvhh
hv
hvRR
Rr
N
n
vhvhvhvh
N
n
hvhv nInQnQnIinQnQnInIN
nVnVN
R ])[][][][(])[][][][(1
][][1 *
0
])[][(1
][][1 22*
0 nQnIN
nVnVN
R h
N
n
h
N
n
hhhh
])[][(1
][][1 22*
0 nQnIN
nVnVN
R v
N
n
v
N
n
vvvv
Auto correlation for H signal
Cross correlation between H and V
Where,
21
00
0
vvvhhh
hv
hvNRNR
R
r
Subtract noise level NnnQinInV hhh ...1][][][
NnnQinInV vvv ...1][][][
Auto correlation for V signal
correction
The method which does not depend on noise level estimation is also proposed. Cheong et al. 2013: The impacts of multi-lag moment processor on a solid-state polarimetric weather radar
Summary
High accuracy is needed for dual-pol data to make use of
them.
Calibration of Z (absolute calibration)
Calibration of Zdr and Fdp
rhv correction is needed to mitigate effect of noise
More information will be available via DWD HP of Weather
Radar Calibration & Monitoring workshop 2017
https://www.dwd.de/EN/specialusers/research_education/
seminar/2017/wxrcalmon2017/wxrcalmon_en_node.html
15