CAINS Center for Autonomous Intelligent Network Systems cains.cs.ucla
12
CAINS Center for Autonomous Intelligent Network Systems www.cains.cs.ucla.edu Town Hall Meeting HSSEAS Friday June 8
description
CAINS Center for Autonomous Intelligent Network Systems www.cains.cs.ucla.edu. Town Hall Meeting HSSEAS Friday June 8. Center for Autonomous Intelligent Network Systems. Founded in 2001 - Initial sponsors: ONR and NSF Mission Statement: Forum for Intelligent Autonomous Systems research - PowerPoint PPT Presentation
Transcript of CAINS Center for Autonomous Intelligent Network Systems cains.cs.ucla

CAINSCenter for Autonomous Intelligent
Network Systemswww.cains.cs.ucla.edu
Town Hall Meeting
HSSEAS
Friday June 8

Center for Autonomous IntelligentNetwork Systems
• Founded in 2001 - Initial sponsors: ONR and NSF
• Mission Statement:
– Forum for Intelligent Autonomous Systems research – Interdisciplinary collaboration: technology, tools, and
test beds– Joint research sponsored by Government and Industry
• Director: Mario Gerla
• Scientific Board: Rajive Bagrodia, Babak Daneshrad, Leonard Kleinrock, Izhak Rubin, Mani Srivastava,
John Villasenor, Clifford Anderson (ONR)

Why a Center for Autonomous Intelligent Systems Research?
• There is growing interest in the collective behavior of “swarms” of intelligent agents:
– Unattended Airborne Vehicles (Internet in the sky)– Vehicles in the urban grid– Underwater floating sensors
• The challenge: scalable, fault tolerant, environment-aware systems for complex missions
• Applications: communications, defense, security, search and rescue, industrial control, environmental monitoring, planetary exploration.

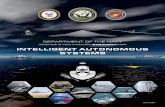
SURVEILLANCE MISSION
SURVEILLANCE MISSION
AIR-TO-AIR MISSION
STRIKE MISSION
FRIENDLY GROUND CONTROL
(MOBILE)
RESUPPLY MISSION
SATELLITE COMMS
Unmanned Control Platform
COMM/TASKING
COMM/TASKING
MannedControl Platform
COMM/TASKING
UAV-UAV NETWORK
Tactical Ad Hoc Network
UAV-UGV NETWORK

Car to Car communications for Safe Driving
Vehicle type: Cadillac XLRCurb weight: 3,547 lbsSpeed: 65 mphAcceleration: - 5m/sec^2Coefficient of friction: .65Driver Attention: YesEtc.
Vehicle type: Cadillac XLRCurb weight: 3,547 lbsSpeed: 45 mphAcceleration: - 20m/sec^2Coefficient of friction: .65Driver Attention: NoEtc.
Vehicle type: Cadillac XLRCurb weight: 3,547 lbsSpeed: 75 mphAcceleration: + 20m/sec^2Coefficient of friction: .65Driver Attention: YesEtc.
Vehicle type: Cadillac XLRCurb weight: 3,547 lbsSpeed: 75 mphAcceleration: + 10m/sec^2Coefficient of friction: .65Driver Attention: YesEtc.
Alert Status: None
Alert Status: Passing Vehicle on left
Alert Status: Inattentive Driver on Right
Alert Status: None
Alert Status: Slowing vehicle aheadAlert Status: Passing vehicle on left

Vehicles as Urban Sensors
VSN-enabled vehicle
Inter -vehiclecommunications
Vehicle -to-roadsidecommunications
Roadside base station
Vid e o Ch e m.
Sensors
S to ra g e
Systems
P ro c.

Research and Technology Objectives
• Collaborations among scientists in different Departments and Schools on autonomous agent projects, exploiting complementary skills and sharing specialized resources
• Research partnerships with existing Centers and with other universities and with industry and government research labs.

Partnerships
• BOEING Phantom Works• Northrop Grumman• Raytheon • Boella Research Lab, Torino, Italy• University of Bologna, Italy• Selex (Finmeccanica), Italy

CAINS Activities
• Current Projects :– Emergency networking using swarms (NSF)– DAWN project (MURY, ARMY)– International Technical Alliance (IBM, ARMY)– DAMASCO (Italian Reasearch Council, Boella)– Urban Networks (MICRO, STM)
• On going collaborations:– Biology inspired systems (Prof Renato Lio’, Cambridge Univ, UK; Prof
Bellavista, Univ of Bologna) – Tactical Systems: Boeing Phantoms Works– CAMPUS Vehicular Testbed (Politecnico Torino, Istituto Boella, University
of Bologna)

The CAMPUS Vehicle Testbed


Recent Publications
“Time-critical Underwater Sensor Diffusion” U. Lee et al Ad Hoc Networks Journal (Elsevier), Special issue on Recent Advances in Wireless Sensor Networks, 2007
“MobEyes: Smart Mobs for Urban Monitoring with a Vehicular Sensor Network, E. Magistretti et al, IEEE Wireless Communications, Vol. 13, No. 5, September 2006.
“The Challenges of Building Scalable Mobile Underwater Wireless Sensor Networks for Aquatic Applications”, Jun-Hong Cui et al, Special Issue of IEEE Network on Wireless Sensor Networking, vol.20, no.3, pp.12-18.