
第13 章 塑性变形·极限分析 -...
18
·280· *第 13 章 塑性变形·极限分析 13.1 概 述 求解一个完整的材料力学问题,一般需同时考虑构件变形的几何关系、力与变形间的物 理关系和静力平衡关系 3 个方面。在前面章节中,力与变形间的物理关系服从虎克定律,应 力与应变间呈线性关系,即变形均限定在线弹性范围内。所以,前面各章节都属于材料力学 的弹性分析的内容。 当变形超过线弹性范围,进入塑性变形阶段时,材料力学问题同样需考虑几何、物理和 静力 3 方面的关系,只是因为所考虑的塑性变形不太大,其几何、静力关系仍旧不变,但物 理关系则有较大变化,其应力与应变间一般呈非线性关系,这种关系与材料的屈服条件、加 载历史及强化规律等复杂因素有关,故使材料力学问题的求解变得复杂。在工程实际中,通 常将这种关系作必要的简化处理,这样考虑材料塑性变形的部分问题就可在材料力学范畴内 得以解决。这就是本章的材料力学的极限分析或塑性分析的内容 。 图 13.1 应力-应变图 由拉伸实验可知,典型的低碳钢在轴向拉伸时的应力-应变图如图 13.1 (a),由于图 中材料的比例极限、弹性极限和屈服极限 3 点非常接近,可以认为应力在达到屈服极限 以前是弹性的,超过屈服极限材料进入塑性状态。同时,根据图 13.1(a)中曲线的水平 锯齿形屈服阶段的相对尺度可知,材料开始强化时的应变远大于它刚进入塑性时的应 变,在屈服阶段,材料的应变在不断增加,而应力基本保持常量。这样,在塑性变形不 太大的情况下,其应力-应变关系可简化为如图 13.1(b)所示的模型,称为理想弹塑性 模型 (elastic perfectly plastic model ),即假设材料在屈服前应力-应变关系是线弹性的, 屈服后是完全塑性的,可发生无限制塑性变形,并且材料在拉伸和压缩时有相同的弹 性模量和屈服极限,屈服后从曲线上任一点处卸载,其应力-应变关系曲线与初始加载 曲线平行。 本章所讨论的构件材料都属于这种理想弹塑性模型。利用它进行材料力学强度计算时,
Transcript of 第13 章 塑性变形·极限分析 -...

材 料 力 学
·280·
*第 13 章 塑性变形·极限分析
13.1 概 述
求解一个完整的材料力学问题,一般需同时考虑构件变形的几何关系、力与变形间的物
理关系和静力平衡关系 3 个方面。在前面章节中,力与变形间的物理关系服从虎克定律,应
力与应变间呈线性关系,即变形均限定在线弹性范围内。所以,前面各章节都属于材料力学
的弹性分析的内容。 当变形超过线弹性范围,进入塑性变形阶段时,材料力学问题同样需考虑几何、物理和
静力 3 方面的关系,只是因为所考虑的塑性变形不太大,其几何、静力关系仍旧不变,但物
理关系则有较大变化,其应力与应变间一般呈非线性关系,这种关系与材料的屈服条件、加
载历史及强化规律等复杂因素有关,故使材料力学问题的求解变得复杂。在工程实际中,通
常将这种关系作必要的简化处理,这样考虑材料塑性变形的部分问题就可在材料力学范畴内
得以解决。这就是本章的材料力学的极限分析或塑性分析的内容。
图 13.1 应力-应变图
由拉伸实验可知,典型的低碳钢在轴向拉伸时的应力-应变图如图 13.1(a),由于图
中材料的比例极限、弹性极限和屈服极限 3 点非常接近,可以认为应力在达到屈服极限
以前是弹性的,超过屈服极限材料进入塑性状态。同时,根据图 13.1(a)中曲线的水平
锯齿形屈服阶段的相对尺度可知,材料开始强化时的应变远大于它刚进入塑性时的应
变,在屈服阶段,材料的应变在不断增加,而应力基本保持常量。这样,在塑性变形不
太大的情况下,其应力-应变关系可简化为如图 13.1(b)所示的模型,称为理想弹塑性
模型(elastic perfectly plastic model),即假设材料在屈服前应力-应变关系是线弹性的,
屈服后是完全塑性的,可发生无限制塑性变形,并且材料在拉伸和压缩时有相同的弹
性模量和屈服极限,屈服后从曲线上任一点处卸载,其应力-应变关系曲线与初始加载
曲线平行。 本章所讨论的构件材料都属于这种理想弹塑性模型。利用它进行材料力学强度计算时,

*第 13 章 塑性变形·极限分析
·281·
有两种不同的设计方法: 1.材料在线弹性范围内的许用应力法(allowable stress method)或弹性载荷法(elastic load
method)。它不允许构件或结构中出现任何塑性变形,构件都必须在弹性范围内工作,把构
件危险载面上的危险点处的相当应力σ r 达到材料的极限应力σ u(脆性材料取σ b,塑性材料取
σ s),即危险点丧失承载能力,作为强度计算的标准。并将此时的载荷称为弹性极限载荷,
用 Fe 表示。即
[ ]rσ σ≤ (13.1)
式中,许用应力为 [ ] u
nσ
σ = ,n 为许用应力法的安全因数。采用许用应力法对结构进行分析
称为弹性分析(elastic analysis)。这就是前面章节使用的方法。 2.材料超过线弹性范围,进入塑性变形阶段的许用载荷法(allowable load method)或
极限载荷法(ultimate load method)。它允许构件或结构中存在塑性变形,并把结构的整体
垮塌(collapse),即完全丧失承载能力,作为强度计算的标准。把结构即将垮塌时所承受的
载荷,称作塑性极限载荷,简称极限载荷(ultimate 1oad),记作 Fu,与极限载荷相对应的
平衡状态称为塑性极限状态,简称极限状态。许用载荷法要求构件或结构的实际最大工作载
荷 FPmax 不能大于极限载荷 Fu 除以相应的安全因数 nu,即
[ ]Pmax uF F≤ (13.2)
式中, [ ] uu
u
FF
n= 为许用极限载荷。采用许用载荷法对结构进行分析称为极限分析(ultimate
analysis)或塑性分析(plastic analysis)。 实际上,对于由塑性材料制成的梁,其横截面上应力为非均匀分布,当其中危险点处的
应力达到σ s 时,其它点并未丧失承载能力。只有当横截面上全部点的应力都达到σ s 时,梁
才会失去对塑性变形的制约,进而变成几何可变的“运动机构”,即完全丧失承载能力。 可见,许用应力法是把构件内危险点处所承受的应力作为考虑的对象,而许用载荷法是
把结构整体所能承受的载荷作为考虑的对象。因许用载荷法放松了对塑性变形的限制,所以
能更充分地利用材料和减轻结构自重。 本章将讨论简单结构的极限分析,并与弹性分析结果进行比校。
13.2 杆系·拉压极限分析
对于静定桁架这样的杆系,各杆的轴力均可由静力平衡方程求出。若材料为理想弹塑性
材料,在继续增大载荷的情况下,应力最大的杆件将首先出现塑性变形,当杆系中有任一根
杆件发生无限制塑性变形时,桁架就成为几何可变的“运动机构”,丧失其承载能力,这时
的载荷也就是极限载荷。因此,对于静定桁架而言,其弹性分析与极限分析没有区别。 本节重点则是讨论超静定桁架杆系的极限载荷(包括弹性极限载荷 Fe、塑性极限载
荷 Fu),其问题将比较复杂。下面通过平面桁架杆系实例来说明弹性分析与极限分析间
的异同。
设 3 杆铰接的超静定桁架如图 13.2(a)所示,3 杆的材料相同,其材料为弹性-理想塑

材 料 力 学
·282·
性如图 13.1(b)所示,弹性模量为 E = 200 GPa,屈服极限为σ s = 240 MPa。三杆的横截面面
积均为 A = 100 mm2,α = 45°,l3 = 120 mm。承受铅垂载荷 FP 作用。试对超静定桁架作弹性
分析和极限分析,分别求结构的弹性极限载荷 Fe 和塑性极限载荷 Fu。 1.对超静定桁架作弹性分析,求杆系结构的弹性极限载荷 Fe。 当载荷FP较小时,3杆的轴向应力都小于屈服极限σ s,杆件处于弹性状态,由变形的几
何关系,得各杆变形的协调关系为
1 2l lΔ = Δ , 13 cos
ll
αΔ
Δ = (13.3)
再由物理关系和图 13.2(b)的静力平衡关系可解出杆件的轴力 2
PN1 N2 3
cos1 2cosFF F α
α= =
+, P
N3 31 2cosFF
α=
+ (13.4)
及节点 A 的垂直位移
( )N3 3 P 32
2 2Ay
F l F lEA EA
δ = =+
(13.5)
随着载荷增加,由于杆 3 轴力最大,其横截面上的应力首先达到屈服极限σ s,即
N3 sF Aσ=
此时,对应杆系上的最大弹性载荷即为弹性极限载荷 Fe,如图 13.2(b)所示,即
( )3e P N3 1 2cosF F F α= = + ( )3
s 1 2cosAσ α= + (13.6)
图 13.2 超静定桁架杆系的极限载荷
再将已知数据代入式(13.6),得 杆系弹性极限载荷 Fe = 40.97 kN
*第 13 章 塑性变形·极限分析
·283·
N1 N2F F= = 12.00 kN, N3F = 24.00 kN
节点 A 的垂直位移 ( ) 6
e144 10 mAyδ −= ×
如图 13.2(c)所示。 采用材料力学弹性分析的许用应力法进行强度计算。
设安全系数 n = 2,则此超静定桁架的许可最大的工作载荷 ( )P max eF ,由式(13.1)得
( )( ) [ ]P maxN3 e u s
r 31 2cos
FFA n nA
σ σσ σ
α= = = =
+≤
( ) ( )3 eP max se
40.97 kN1 2cos / 20.49 kN2.0
FF A n
nσ α+ = = =≤
节点 A 的许可最大的垂直位移
( ) ( ) 66
,max144 10 72 10 m
2.0Ay e
Ay e n
δδ
−−×
= = = ×
2.对超静定桁架作极限分析,求杆系结构的塑性极限载荷 Fu。 若载荷达到弹性极限载荷Fe时,杆系并没有丧失承载能力,随着载荷继续增加,杆 3保
持轴力 e sF Aσ= 不变,两边杆受力逐渐增加,但仍处于弹性状态,其轴力由图 13.2(c)的平
衡条件可得,但图中的 Fe 应换成可变载荷 FP,于是
P s PN1 N2
24.0 kN2cos 2cos
F A FF Fσα α
− −= = =
直到两边杆件中的应力都达到屈服极限σ s 时,整个杆系才会因失去对塑性变形的约束而成
为几何可变“机构”,发生机构运动,即完全丧失承载能力。此时的载荷即为塑性极限载荷
Fu,并可由图 13.2(d)的平衡条件得到
u s s(1 2cos ) (1 2) 57.94 kNF A Aσ α σ= + = + =
而即将跨塌时,节点 A 的垂直位移为
( ) 6s 1 s 3u
22 2 288 10 mAy AC
Al ll
EA Eσ σ
δ −= Δ = = = ×
载荷与节点 A 的垂直位移的关系如图 13.2(e)所示。 采用材料力学极限分析的许用载荷法进行强度计算。 设安全系数 u 2n = ,则此超静定桁架的许可最大的工作载荷 ( )P max u
F ,由式(13.2)得
[ ] uPmax u
u
FF F
n=≤
( ) uP max u
u
57.94 kN 28.97 kN2.0
FF
n= =≤
在此载荷下,节点 A 许可最大的垂直位移为
( ) ( ) 66u
,max uu
288 10 m 144 10 m2
AyAy n
δδ
−−×
= = = × 。

材 料 力 学
·284·
3.用叠加法分析残余应力 载荷达到塑性极限载荷 Fu 后即卸载,卸载过程中各杆的应力-应变关系均为线弹性,弹
性模量与加载时相同,只是由于两边杆的应力刚达到屈服极限,还没有塑性变形。但就杆 3
而言,它已产生了不可恢复的残余变形 ( )3 rlΔ ,即
( ) ( ) ( )3 r u eAy Ayl δ δΔ = − (13.7)
( ) 6 6 63 r
288 10 m-144 10 m 144 10 ml − − −Δ = × × = ×
在逐渐卸载过程中,两边杆试图恢复原长的企图将受到杆 3 的阻止,当载荷卸至零
时,杆 3 内还将存在一定的压应力,而两边杆内同样存在一定的拉应力。这些在完全卸载
后尚存的应力称为残余应力(residual stress),这类似于第二章中因加工误差而引起装配应
力。对于静定桁架,杆件若发生塑性变形后卸载,虽存在残余应变,但由于没有多余约
束,所以不会出现残余应力。对于超静定桁架,若某些杆件发生塑性变形后卸载,也将引
起残余应力。 残余应力采用叠加法进行分析,通过杆系在两种受力状态下各杆内力的叠加而求得。 第一种受力状态是杆系受塑性极限载荷 Fu 作用,所有的杆件都已屈服,如图 13.2(d)
所示,即各杆内力
( ) ( ) ( )N1 N2 N3 su u u24 kNF F F Aσ= = = =
第二种受力状态是设想杆系受反向的塑性极限载荷 Fu,并且认为在整个加载过程中杆
系是弹性的,杆 3 与两边杆的内力按比例增长,最终可由图 13.2(c)按载荷比例求得
( ) ( )N1 N2u u
57.9412 kN 16.97 kN40.97
F F− −
−⎛ ⎞= = × = −⎜ ⎟⎝ ⎠
( )N3 u
57.9424 kN 33.94 kN40.97
F−
−⎛ ⎞= × = −⎜ ⎟⎝ ⎠
叠加以上两种受力状态下各杆的内力,得各杆的残余内力
( ) ( ) ( )Ni Ni Nir u uF F F
−= + (13.8)
( ) ( ) ( )N1 N2r r24.00 16.97 kN 7.03 kNF F= = − = ( ) ( )N3 r
24.00 33.94 kN 9.94 kNF = − = −
则各杆的残余应力分别为
( ) ( )N rr
ii
i
FA
σ = (13.9)
( ) ( ) N11 2r r
70.3 MPaFA
σ σ= = = ( ) N33 r
99.4 MPaFA
σ = = −
平面桁架杆系实例说明了弹性分析与极限分析间的异同,并分析了杆系加载到塑性极限
载荷 Fu 后,再卸载到零时,杆系中各杆内均留有残余应力及其分析方法。 综上所述,考虑塑性的强度计算时,若取安全因数相同,用许用载荷法所得许可最大工
作载荷比用许用应力法所得要大(本例为 41%,即杆系结构承载能力可提高 41%),若杆系
为静定结构,则二者没有区别;若为超静定结构,超静定次数越高,这两种方法所得结果的
差别一般越大。另外,由于卸载后存有残余应力,因此极限分析对交变载荷不适用。

*第 13 章 塑性变形·极限分析
·285·
13.3 圆轴·扭转极限分析
由第 3 章已知,在材料为线弹性的情况下,直径为 d 的圆轴扭转时横截面上任一点的切
应力和截面边缘最大切应力公式为
P
TIρρτ = max 3
P
16π
T TW d
τ = = (13.10)
1.弹性极限扭矩分析 对于理想弹塑性材料,其切应力τ 和切应变γ 的关系如图 13.3 所示。 随着扭矩 T 的逐渐增加,当 eT T= 时,截面边缘的最大切应力 maxτ 首先达到剪切屈服强
度 sτ ,如图 13.4(b)所示。这时相应的扭矩 eT 称为弹性极限扭矩(elastic ultimate),由式
(13.10)可得
emax s
p
TW
τ τ= =
图 13.3 理想弹塑性材料τ -γ 关系 图 13.4 圆轴截面弹性极限扭矩应力分布
从而得到弹性极限扭矩
e s pT Wτ= i (13.11) 3
e sπ16dT τ= (13.12)
2.塑性极限扭矩分析 扭矩继续增大,当 e uT T T< < 时,横截面靠近边缘部分应力先后达到 sτ ,并相继屈服而
形成塑性区,如图 13.4(c)所示呈现出弹塑性状态。扭矩再继续增大,当 uT T= 时,横截面
上所有点的切应力全部达到 sτ 时,构件丧失抵抗扭转变形的能力,发生机构运动。呈现出
图 13.4(d)所示塑性极限状态,扭矩 uT 称为塑性极限扭矩(plastic ultimate),为 3/ 2 2
u s s s0
πd 2π d12
d
A
dT Aρτ τ ρ ρ τ= = =∫ ∫ (13.13)
比较式(13.12)和式(13.13),得
u
e
43
TT
= (13.14)
再次应证了考虑塑性的强度计算时,若取安全因数相同,用许用载荷法所得塑性极限扭矩

材 料 力 学
·286·
比用许用应力法所得弹性极限扭矩大(本例大 33.3%,即圆轴承载能力可提高 33.3%)。 3.残余应力分析 若圆轴加载至塑性极限外扭矩后卸载,在卸载过程中,应力-应变关系为线性弹性关
系,如图 13.5 所示,因此卸载过程中产生的应力可由(13.10)式中的 ρτ 和 maxτ 求得。 当卸载至零时最大应力 maxτ 为
umax s3
16 4π 3
Td
τ τ= = (13.15)
其方向与加载时产生切应力的方向相反,加载过程中产生的切应力与卸载过程产生的切应力
叠加,即为完全卸载后圆轴内的残余应力,叠加过程如图13.5所示,圆轴中心处残余应力为
r1 sτ τ= (13.16)
图 13.5 圆轴中心处残余应力
横截面外缘处的残余应力为
r2 max s s13
τ τ τ τ= − = (13.17)
若改为外径为 D,内径为 d,且 / 0.8d D α= = 的空心圆轴,材料剪切屈服强度为τ s,有
兴趣的读者可分析其弹性极限扭矩和塑性极限扭矩,并与实心圆轴进行比较。
13.4 直梁·弯曲极限分析
无论材料是线弹性的还是塑性的,平面假设均成立。因此,在讨论直梁塑性弯曲时,可
利用梁横截面上沿不同高度的线应变呈直线分布的几何关
系、理想弹塑模型如图 13.6 所示的物理关系以及静力平衡
关系,对梁进行极限分析。 1.弹性极限弯矩分析 在线弹性范围内,梁弯曲时,危险截面上的正应力呈
线性分布,如图 13.7(a)所示。由第 6 章可知,设中性轴为
对称轴,则距中性轴最远的上、下边缘处的最大正应力为
maxz
MW
σ = (13.8)
对于横截高度为 h、宽度为 b 的矩形截面梁,其弹性抗弯截面系数2
6zbhW = 。若是横力
弯曲,因其截面上由剪力引起的切应力相对于正应力非常小而被忽略。在弯矩 M 随载荷增
图 13.6 理想弹塑模型σ - ε 关系

*第 13 章 塑性变形·极限分析
·287·
加而增大的过程中,当最大正应力σ max 达到屈服极限σ s 时,如图 13.7(c),对应的最大弹
性弯矩称为弹性极限弯矩(elastic ultimate moment),简称屈服弯矩(yield moment),记作
Me,有
e szM W σ= i (13.19)
2.塑性极限弯矩分析 随着载荷继续增加,横截面上正应力达到屈服极限σ s 的塑性区域逐渐由上、下边缘向
中性轴扩展,(设弹塑性区的边界到中性轴的距离用 ys 表示,如图 13.7(d)),直至横截
面上所有点的正应力均达到σ s 时,如图 13.7(d),则整个截面完全屈服,对应的弯矩称为
塑性极限弯矩(plastic ultimate moment),简称极限弯矩,记作 Mu。则有
( )2
u s s s s u sd2 4 2 4 4A
h h h h bhM y A b b Wσ σ σ σ σ⎛ ⎞ ⎛ ⎞= = + − − = =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠∫ i i i i (13.20)
图 13.7 梁弯曲时危险截面上的正应力分布图
式中,Wu 称为塑性抗弯截面系数。 由式(13.19)和式(13.20)可知,截面上塑性极限弯矩 Mu 与弹性极限弯矩 Me 之比等
于 Wu 与 Wz 之比,即
u u
e z
M Wf
M W= = (13.21)
式中,f 定义为形状系数(shape factor)。 可知,从截面开始屈服到截面完全屈服,梁潜在的承载能力得到了进一步发挥,其承载
能力提高的百分比为
( ) u1 100% 1 100%z
Wf
W⎛ ⎞
− × = − ×⎜ ⎟⎝ ⎠
对于横截高度为 h、宽度为 b 的矩形截面梁 2
u2
/ 4 1.5/ 6z
W bhfW bh
= = =
即表明从截面开始屈服到截面完全屈服,矩形截面的承载能力可提高 1 50%f − = 。不同形
状的横截面有不同的形状系数,几种常用截面的形状系数列于表 13.1。
材 料 力 学
·288·
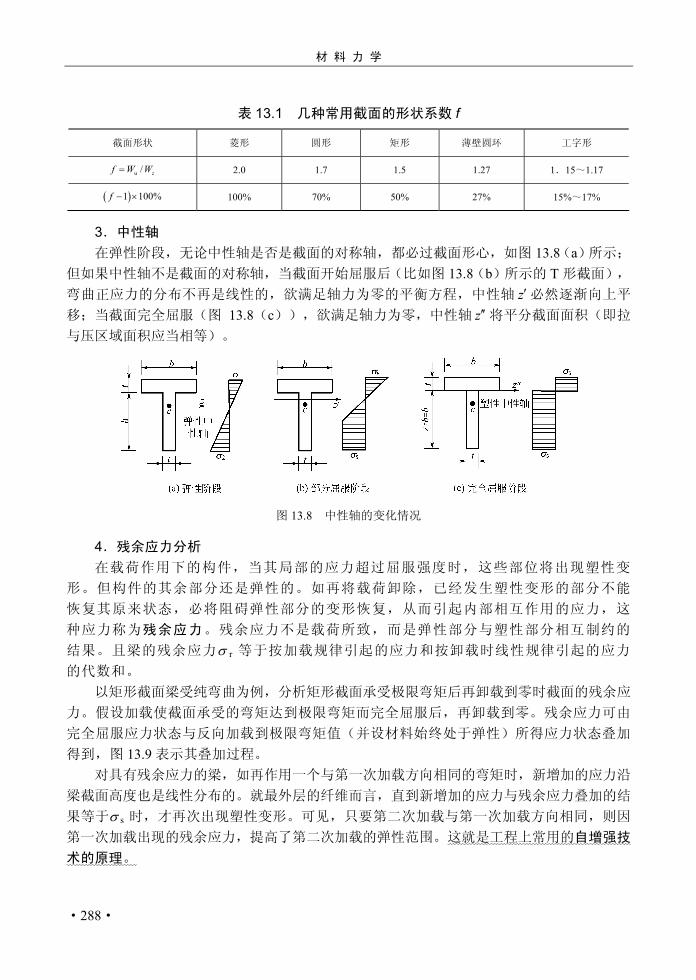
表 13.1 几种常用截面的形状系数 f
截面形状 菱形 圆形 矩形 薄壁圆环 工字形
u / zf W W= 2.0 1.7 1.5 1.27 1.15~1.17
( )1 100%f − × 100% 70% 50% 27% 15%~17%
3.中性轴 在弹性阶段,无论中性轴是否是截面的对称轴,都必过截面形心,如图 13.8(a)所示;
但如果中性轴不是截面的对称轴,当截面开始屈服后(比如图 13.8(b)所示的 T 形截面),
弯曲正应力的分布不再是线性的,欲满足轴力为零的平衡方程,中性轴 z′必然逐渐向上平
移;当截面完全屈服(图 13.8(c)),欲满足轴力为零,中性轴 z′′将平分截面面积(即拉
与压区域面积应当相等)。
图 13.8 中性轴的变化情况
4.残余应力分析 在载荷作用下的构件,当其局部的应力超过屈服强度时,这些部位将出现塑性变
形。但构件的其余部分还是弹性的。如再将载荷卸除,已经发生塑性变形的部分不能
恢复其原来状态,必将阻碍弹性部分的变形恢复,从而引起内部相互作用的应力,这
种应力称为残余应力。残余应力不是载荷所致,而是弹性部分与塑性部分相互制约的
结果。且梁的残余应力σ r 等于按加载规律引起的应力和按卸载时线性规律引起的应力
的代数和。 以矩形截面梁受纯弯曲为例,分析矩形截面承受极限弯矩后再卸载到零时截面的残余应
力。假设加载使截面承受的弯矩达到极限弯矩而完全屈服后,再卸载到零。残余应力可由
完全屈服应力状态与反向加载到极限弯矩值(并设材料始终处于弹性)所得应力状态叠加
得到,图 13.9 表示其叠加过程。 对具有残余应力的梁,如再作用一个与第一次加载方向相同的弯矩时,新增加的应力沿
梁截面高度也是线性分布的。就最外层的纤维而言,直到新增加的应力与残余应力叠加的结
果等于σ s 时,才再次出现塑性变形。可见,只要第二次加载与第一次加载方向相同,则因
第一次加载出现的残余应力,提高了第二次加载的弹性范围。这就是工程上常用的自增强技
术的原理。

*第 13 章 塑性变形·极限分析
·289·
图 13.9 残余应力σ r 分布
5.塑性铰 上面讨论了梁截面的屈服弯矩(弹性极限弯矩)Me 和极限弯矩(塑性极限弯矩)Mu,现
举例说明梁的极限载荷的求解方法。 考虑跨中受集中力的矩形截面简支梁,如图 13.10 所示,增加载荷,当跨中(x = 0)处
的弯矩达到极限弯矩 Mu 时,按图 13.10(b)中弯矩图的比例计算,距离跨中为 x 处截面上
的弯矩 M(x)为
u( ) l xM x Ml−⎛ ⎞= ⎜ ⎟
⎝ ⎠ (13.22a)
由式(13.20),有 2
s( )4
bh l xM xl
σ −⎛ ⎞= ⎜ ⎟⎝ ⎠
(13.22b)
设 ys 为截面上中性轴到弹塑性区边界的距离,如图 13.7(c)。当截面开始屈服时 s =2hy ,
当截面完全屈服时 ys = 0。那么根据截面上应力的分布,同样可计算出距离跨中为 x处截面上
的弯矩
图 13.10 矩形截面简支梁塑性铰

材 料 力 学
·290·
22s s s
s s s s s2( ) 2
2 4 2 2 3 4 3y y yh h hM x b y b y bσ σ σ
⎛ ⎞⎡ ⎤⎛ ⎞⎛ ⎞= − + + = −⎜ ⎟⎜ ⎟⎢ ⎥⎜ ⎟⎝ ⎠ ⎝ ⎠⎣ ⎦ ⎝ ⎠i i (13.22c)
由式(13.22b)及式(13.22c),得
s3
2h xy
l= (13.23)
上式表明沿梁的长度弹塑性区的边界线是 x 的二次抛物线,塑性区延伸到 / 3x l= ± 处,
整个塑性区由图 13.10(a)中阴影所示,此时梁已不能继续承担载荷,跨中截面两侧的梁在
极限弯矩 Mu 作用下相互转动已不受制约,相当于在跨中截面处形成了一个铰链,在铰链的
两侧作用有大小等于极限弯矩的力偶,力偶的转向与其所在部分的梁绕此铰转动的方向相
反,如图 13.10(c),这样的铰链称为塑性铰(plastic hinge)。显然,梁横力弯曲时,塑性
铰总是在最大弯矩截面处形成。 6.静定梁的极限载荷 对于静定梁,当出现塑性铰时,梁变成几何可变的“机构”,即处于整体垮塌前的极限
状态。产生塑性铰所需的载荷即为梁的(塑性)极限载荷,可根据简单的静力学原理计算求
出。 图 13.10 所示横截高度为 h、宽度为 b 的矩形截面静定简支梁的极限载荷可由
uu 2C B
FM M F l l= = =i i 和式(13.20),得
2u u s
u s2 2M W bhF
l l lσ
σ= = =
【例 13.1】 图 13.11(a)所示等截面静定简支梁,左半部
承受均布载荷 q 的作用,试求梁的极限载荷 qu。 【解】:作静定简支梁的弯矩图,见图 13.11(b)。最大
弯矩 maxM 发生在矩左端 3 /8l 处的 D 截面上,为
2max
9128DM M ql= =
当载荷q增加到使 maxM 达到截面的极限弯矩时,D截面处
出现塑性铰,梁处于极限状态,如图 13.11(c)所示,此时载
荷即为梁的极限载荷,即
2max u u
9128
M q l M= =
故 uu 2
1289
Mq
l=
7.超静定梁的极限载荷 对于超静定梁,情况则有所不同。对一次超静定梁,当出现第一个塑性铰时,并不会引
起梁的完全破坏,这是因为一方面塑性铰抵消了多余约束使超静定梁成为静定梁;另一方面
在塑性铰截面处仍可承担极限弯矩的作用。在继续加载的情况下,梁的弯矩将重新分配,塑
性铰截面处的弯矩保持极限弯矩不变,而其他截面的弯矩将增大,直到第二个塑性铰出现,
图 13.11 例 13.1 图

*第 13 章 塑性变形·极限分析
·291·
梁才处于垮塌的极限状态。因此,产生第二个塑性铰时的载荷即为梁的极限载荷。对 n 次超
静定梁,同样可推出,当出现 n + 1 个塑性铰时,梁处于垮塌前的极限状态,相应的载荷即
为该梁的极限载荷。 【例 13.2】 试求图 13.12(a)所示一次超静定等截面梁最大弹性载荷与极限载荷的比值。 【解】:设想载荷 F 从零逐渐增加,当梁处于弹性阶段,弯矩图如图 13.12(b)所示,
最大弯矩 M1 产生于固定端 A 处。随着载荷增加,截面 A 上最大应力首先达到屈服极限,此
时截面 A 上的弯矩为最大弹性弯矩,梁的载荷为最大弹性载荷
ee
163M
Fl
= (13.24)
继续增大载荷 F,截面 A 处首先形成塑性铰,梁变为静定的简支梁,除原载荷 F 外,在
截面 A 处承受大小为极限弯矩 Mu 的力偶,如图 13.12(c)。再进一步增大载荷 F,直到截面
C 也形成塑性铰,梁成为几何可变的“机构”,处于垮塌的极限状态,如图 13.12(d)。
图 13.12 例 13.2 图
再研究梁处于极限状态时刻的平衡,可确定极限载荷的大小。
考虑整体,由 0AM =∑ ,得
uu 0
2 BF l
M F l− + = (13.25)
考虑 CB 部分,由 0CM =∑ ,得
u 02BF lM− + = (13.26)
由式(13.25)和式(13.26)可得
uu
6MF
l= (13.27)
根据式(13.24)和式(13.26)可得极限载荷与最大弹性载荷的比值
u u u
e e
9 9 98 8 8z
F M Wf
F M W= = =

材 料 力 学
·292·
明显地,在静定梁中 Fu 与 Fe 的比值即为截面形状系数 f。超静定梁中 Fu 与 Fe 比值的增
加是因为梁中一个截面被破坏(形成塑性铰),其他部分开始承受附加载荷,使弯矩重新分
配,从而增大了超静定梁的极限强度。 8.用虚位移原理求梁的极限载荷 极限载荷是根据梁处于极限状态时的平衡条件来确定的。这使得我们可以应用虚位移原
理(principl Of Virtual displacement)来求解极限载荷。虚位移原理指出:一刚体体系在一力
系作用下处于平衡,则在该体系产生微小虚位移的过程中,力系所作的功之和必定为零。在
极限状态下,可忽略梁各部分的弹性变形,将其可看成由塑性铰相连的刚性杆件, 用虚位移求【例 13.2】极限载荷。在图 13.12(d)中,设给定杆 AC 沿机构运动方向产
生一微小虚位移δ θ ,则杆 BC 将转过相同的角度δ θ ,点 C 将垂直向下移动 / 2lδθ i 。在整
个虚位移过程中,截面 A 处的极限弯矩所作虚功为 uM δθ− ,截面 C 处的极限弯矩所作虚功
为 u2M δθ− (负号是因为 Mu 的转向与δ θ 转动方向相反)。极限载荷 Fu 所做的功为 u 2lF δθ i,
所以虚功方程为
u u u2 02
lF M Mδθ δθ δθ− − =i
消去定义的虚位移δ θ ,得
uu
6MF
l=
可见,所得结果与式(13.27)相同。 【例 13.3】 试用虚位移原理求解如图 13.13(a)所示的等截面超静定梁的极限载荷 Fu。 【解】:在前面的例子里,我们是根据梁在弹性范围内的弯矩图来确定极限状态时塑性铰
的位置的,这往往需要进行超静定分析。其实,极限分析只需找出所有可能的极限状态,并
计算其相应的极限载荷,最后加以比较,其中最小的极限载荷即为梁真正的极限载荷。 本题在截面C和D处施加两个集中载荷,梁中弯矩的峰值将发生于载荷或支座反力所作
用的截面 A、C 及 D 处,其中任意两个截面出现塑性铰,梁即处于极限状态,共有 3 种可能
性,其极限状态分别如图 13.13(b)、图 13.13(c)和图 13.13(d)所示。
图 13.13 例 13.3 图

*第 13 章 塑性变形·极限分析
·293·
对于图 13.13(b)所示极限状态,虚功方程为
u1 u2 u u 2 02 4
l lF F M Mθ θ θ θ⎛ ⎞ ⎛ ⎞+ − − =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
i i
因恒有 u1 u u2 u2F F F F= =, ,可得
uu
3MF
l=
同理,由虚位移原理,图 13.13(c)、图 13.13(d)所示极限状态的极限载荷分别为
uu
52M
Fl
=
uu
6MF
l=
比校这 3 个结果,其中最小的极限载荷即为本超静定梁真实的极限载荷,即 uumin
52M
Fl
= ,
所对应的极限状态为图 13.13(c)所示。 【例 13.4】 试求图 13.14(a)所示等截面超静定连续梁的极限载荷(设 EI 为常量)。 【解】:图 13.14(a)所示超静定梁,已知 /16AF ql= , 17 /16BF ql= , 3 /8DF ql= ,作
弯矩图如图 13.14(b)。可知,随载荷的增加截面 C 首先形成塑性铰,然后,当截面 B 形成
塑性铰时,梁处于极限状态(图 13.14(c))。
图 13.14 例 13.4 图
考虑 BD 段极限平衡状态,由 0BM =∑ ,有
u u 04 2Dl lM F F− + = (13.28)
考虑 CD 段极限平衡状态,由 0CM =∑ ,有
u 04DlM F− + = (13.29)

材 料 力 学
·294·
由式(13.28)与式(13.29),得
u s uu
12 12M WF
l lσ
= = (13.30)
对于超静定连续梁,通常垮塌仅出现在其中一跨。在解此题时,不同的载荷是按比例
(本例为 /F q l= )增加的,若改变载荷比例(比如 / / 4F q l= ),则极限状态有可能改变,
此时另一种可能的极限状态由图 13.14(d)所示。本题也可用虚位移原理求解。
思 考 题
思 13.1 何谓许用应力法?何谓许用载荷法?构件的失效和结构的整体垮塌有什么不同? 思 13.2 服从理想弹塑性模型的材料应满足什么条件? 思 13.3 何谓弹性分析?何谓塑性分析或极限分析?
思 13.4 杆件、圆轴和梁的极限内力与极限载荷相同吗? 思 13.5 什么是塑性铰?试比较塑性铰和普通铰的异同。 思 13.6 什么是残余应力?为什么说极限分析对交变载荷不适用?
分 类 习 题
☆【13.1 类】 计算题(拉压杆系·极限分析) 题 13.1.1 试求如图所示结构的极限载荷,已知每个杆件达到屈服时的受力为 24 kN。 题 13.1.2 一水平刚性杆 AC,A 端为固定铰链支承,在 B、C 处分别与两根长度 l、横
截面面积 A 和材料均相同的等直杆铰接,如图所示。两杆的材料可理想化为理想弹塑性模
型,其弹性模量为 E、屈服极限为σ s。若在刚性杆的 D 处承受集中载荷 F,试求结构的屈服
载荷 Fs 和极限载荷 Fu。
题 13.1.1 图 题 13.1.2 图
题 13.1.3 刚性梁 AB 由 4 根同一材料制成的等直杆 1、2、3、4 支承,在 D 点处承受铅 垂载荷 F,如图所示。4 杆的横截面面积均为 A,材料可视为理想塑弹性模型,其弹性模量
为 E、屈服极限为σ s。试求结构的极限载荷。
*第 13 章 塑性变形·极限分析
·295·
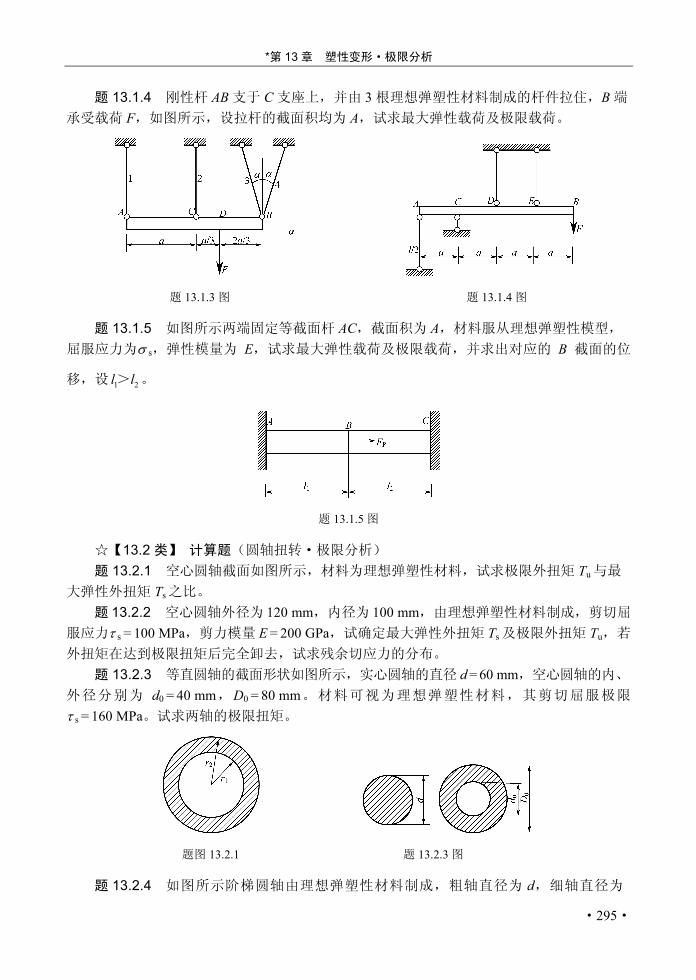
题 13.1.4 刚性杆 AB 支于 C 支座上,并由 3 根理想弹塑性材料制成的杆件拉住,B 端 承受载荷 F,如图所示,设拉杆的截面积均为 A,试求最大弹性载荷及极限载荷。
题 13.1.3 图 题 13.1.4 图
题 13.1.5 如图所示两端固定等截面杆 AC,截面积为 A,材料服从理想弹塑性模型, 屈服应力为σ s,弹性模量为 E,试求最大弹性载荷及极限载荷,并求出对应的 B 截面的位
移,设 1 2l l> 。
题 13.1.5 图
☆【13.2 类】 计算题(圆轴扭转·极限分析) 题 13.2.1 空心圆轴截面如图所示,材料为理想弹塑性材料,试求极限外扭矩 Tu 与最
大弹性外扭矩 Ts 之比。 题 13.2.2 空心圆轴外径为 120 mm,内径为 100 mm,由理想弹塑性材料制成,剪切屈
服应力τ s = 100 MPa,剪力模量 E = 200 GPa,试确定最大弹性外扭矩 Ts 及极限外扭矩 Tu,若
外扭矩在达到极限扭矩后完全卸去,试求残余切应力的分布。 题 13.2.3 等直圆轴的截面形状如图所示,实心圆轴的直径 d = 60 mm,空心圆轴的内、
外径分别为 d0 = 40 mm,D0 = 80 mm。材料可视为理想弹塑性材料,其剪切屈服极限
τ s = 160 MPa。试求两轴的极限扭矩。
题图 13.2.1 题 13.2.3 图
题 13.2.4 如图所示阶梯圆轴由理想弹塑性材料制成,粗轴直径为 d,细轴直径为

材 料 力 学
·296·
d/2,跨中承受集中外扭矩 T,若剪切屈服应力为σ s,试求最大弹性外扭矩 Ts 及极限外
扭矩 Tu。
题 13.2.4 图
☆【13.3 类】 计算题(梁的弯曲·极限分析) 题 13.3.1 试求图示受均布载荷矩形截面简支梁,在极限载荷时塑性区的形状及范围,
设 d 为截面上中性轴到弹塑性区边界的距离。 题 13.3.2 矩形截面 b × h 的直梁承受纯弯曲,梁材料可视为理想弹塑性,弹性模量为
E,屈服极限为σ s。当加载至塑性区达到 h/4 的深度(如图所示),梁处于弹性-塑性状态时,
卸除载荷。试求:(1)卸载后,梁的残余变形(残余曲率);(2)为使梁轴回复到直线状
态,需施加的外力偶矩。
题 13.3.1 图 题 13.3.2 图
题 13.3.3 如图所示矩形截面简支梁长 l =1200 mm,跨中 C 截面承受集中载荷 FP,试 问当 C 截面处中性轴到弹塑性区边界的距离 d = 24 mm 时,载荷的大小及塑性区沿梁的长
度 a。
题 13.3.3 图
题 13.3.4 受均布载荷作用的简支梁如图所示。已知该梁的材料可视为理想弹塑性,屈 服极限σ s = 235 MPa。试求梁的极限载荷。
题 13.3.5 矩形截面简支梁受载如图所示。已知梁的截面尺寸为 b = 60 mm,h = 120 mm; 梁的材料可视为理想弹塑性,屈服极限σ s = 235 MPa。试求梁的极限载荷。

*第 13 章 塑性变形·极限分析
·297·
题 13.3.4 图(单位:mm) 题 13.3.5 图
题 13.3.6 试求图示梁的极限载荷及塑性铰的位置。
题 13.3.6 图
题 13.3.7 试求图示梁的极限载荷 Fu 及 qu。
题 13.3.7 图
题 13.3.8 如图所示等截面梁在 C 处受集中力 FP,在 D 处受集中力βFP,其中β 为一正 的系数,试求此梁的极限载荷 Fu,并求出使梁的总极限载荷取最大值时的β 。
题 13.3.9 试求图示两跨梁的极限载荷,假设系数β = 1 或β = 2/3。
题 13.3.8 图 题 13.3.9 图


















