BYTE 1979

If you can't read please download the document
-
Upload
wynnwynn88 -
Category
Documents
-
view
63 -
download
0
description
Byte magazine
Transcript of BYTE 1979
-
14 February 1979 BYTE Publications Inc
ioral design aspects of biological systems (ie: bioni cs). Cy beranim etrics allows the designer to apprec iate the variety of methods empl oyed by the various systems because both mechanical and biological systems are exami ned in terms of their similarities in st ructure and organi zatio n. This means that a person designing a sys-tem must be equally famili ar with bio logy, computer sc iences, cybernetics, art ificial intelligence, mechanics, and physics.
Biological Considerations
Generali zati ons regardi ng th e nervous system leave the impress ion that nerves merely conduct informat ion, or that the eye works so mewhat like a television camera that sends an inverted image to the brain for analysis. Th ese oversimplifications might lead designers to believe that they can make a computer "see" by interfacing an array of digital light detectors to it. But, there is more to vision than meets the digital eye. In the compound eye of the ant, for example, th ere are 1200 ommatida (light sensitive elements) . Some of these are so special ized that they are sensit ive o nl y to the pol ar ization of ultraviolet radiation from the sun and are used by the ant exc lusively for navigatio nal purposes. Other ommatida are used for co lor, size , or motion detectio n and all are connected to the brain by nerve fibers that not on ly conduct but also process the video info rmatio n. However, it is ve ry doubtful that an ant "sees" an image in the sense of human co nscio usness; more likely, it apprehends its optical environment in some other way .
Just as important as being ab le to under-stand various biological and mechanical con-cepts is the ability to app ly these concepts to the design of a system. Afte r all , it would be impractical to try to build an authentic copy of an organ ism. I n the prev ious exam-ple, if a neural cybernetist wanted to utili ze digital light se nsors, he might attempt to duplicate the ant 's visual system. But, he would face many prob lems, the toughest be-ing the construction of artifi cial omm atid a. Each ommatid a in the ant's eye has a parti c-ular structure depending on its function, whereas digital senso rs are a matrix of uni-form sensing elements. It wo uld be very diffi cul t to build the individual micro-optics necessary to perform color sep-arat io n li ght polari zation analysis. Of course, some of the analysis cou ld be performed by a computer, but the more effo rt that goes into making a system into a faithful model of the ant, the more the system would be compromised. In the end, it would have been more economical to use a real ant.
If, instead of attempting to copy the
ant like the neural cybernetist, or ignoring the ant like the cognitionist, the designer applies the concepts of ant vision toward a certain goal, he might stand a chance of developing an operational system. I f the system is to navigate by sunlight, certain as pects of the ant's polarization detector would be useful; however, color recog-nition and motion detection would be use-less features and therefo re not included in the system . The purpose of cyberanimetrics as a design philosophy, then, is to inten-tionally apply accepted, standard biological and mec hanical concepts to create a robot or artificial intelligence device that can accomplish certain predefined goals.
Cyberanimetrics and Design
To see how cyberanimetrics works as a design philosophy, consider the design of the system pictured in photo 1. This system, named NELOC (neural log ic cyber-animate), was initi ally designed for use as a subsystem on a land survey vehicle (LSV). Built to be located in a forward turret, the system was designed to gather soil, liquid , and fl ora samples from its location . Ideally, the system could do this either automatically or by remote oper-ator control.
Th e only critical limiting factor in th e system's design is cost. To stay within a reasonable budget, I h ad to organize the manner in which I was going to design the system so my effort would not be wasteful or redund ant. I resolved the matter by formul ating the following steps for re-search and develo pment:
1. Define the system's application . 2. Define the qualities necessary for the
system to perform its application. 3. Based on these definitions, cons ider
the mech anisms employed by bio-logical or mech anical systems that closely match the definition.
4. Analyze the system(s) . 5. Based on this analysis, evaluate the
relative meri ts, (ie: cost, complexity, and performance) of us ing the an-alyzed system's method in the design of the robotic (in this case, turret) sys-tem. Translate this analysis into de-sign.
These gu idelines forced me to clarify the need for the system and the means and method of its operation - and I found that these five steps involving the system design were more important than the phases of its construction.
Design work on the system bega n by defining its characteristics. I determined
Circle 255 on inquiry card. _
-
16 Februa.ry 1979BYTE Publica.tions Inc
that the turret system should be able to locate, classify, and manipulate objects close to it (within reaching distance of the manipulator arm). To accomplish this, the turret system would have to exhibit four animate qualities. First of all , the turret system would have to be organized (ie: that the system had to be able to handle the movement and analysis of data in some consistent manner). The system would also have to express irritability (ie: certain stimuli, whether internal or external, would cause the turret system to act in some characteristic manner). For example, if a specimen moved out of the system's view, the system would respond by look-ing for the lost specimen . The third animate quality was motion, a necessary quality for the system to work in its environment. The last quality required is adaptation, probably the most important feature since I could not envision all of the possible situations the system might encounter. However, this type of adaptation would not be structural, but rather "intellectual" in nature. Without the ability to adapt, the system would not learn from fail ure.
After considering the proposed design characteristics, I selected the frog as a model to study, primarily because of its fas-cinating ability to locate and catch insects. In order to catch a flying insect, for in-stance, the frog must be able to scan an area greater than the reach of its tongue and then classify various objects such as prey, preda-tors, other frogs, etc, based on sensory data. Finally, the frog responds to the flying insect (solely on the basis of visual infor-mation) by attempting to catch the object. Although the structures of the frog and the turret system are significantly different, the function in each case is similar.
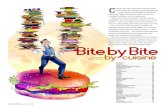
The second reason for selecting the frog is simplicity . By selecting the frog over a more complex organism (ie: more highly evolved), I would save much time in deter-mining a model of how the frog performed its functions. Figure 1 shows the frog and some of its main neurological con-stituents. The eyes and sensory neurons form input devices. The small lobular brain and spinal cord make up' the bul k of the processing system, while the motor nerves and muscles serve as output mech-anisms. This phase and the next involved quite a bit of work, since therp was so much data to examine . It should be noted that the presentation of my analysis here is very abbreviated in order that most of the concepts can be discussed. One structure in particular, the net convexity detector, is given a more detailed treatment, however . The detector's function and structure will be discussed extensively, showing how the
concept was researched and applied to the design of the turret system. This research and development is representative of the work performed on the entire system. A bibliography is provided in part 2 of this article for those who wish to research the subject more.
Optical Processes of the Frog
Analysis of the frog began with the sensory and motor nervous systems, in particular the eye . The frog's eye is classi-fied as a camera-type eye, meaning that the entire image is focused through a single lens. The perception and subsequent analysis of an image begins on the surface of the retina. There, thousands of groups of re-ceptors and their associated neurons cap-ture tiny portions of the total image. After the retinal neurons process the receptor data, they communicate it to the optic nerve, wh ich further processes the data as it is relayed to the brain. The result is the generation of four specific types of in-formation about the image being perceived. The first type of information that the frog's nervous system extracts from the image is net dimming, which describes how much of an image has dimmed when compared to the previous image. Moving edge is the second type, concerned with motion at the periphery of objects in the image field. Next is sustained contrast data. This in-formation relays the shape and size of an object in the image field by describing edges of optical contrast. Finally there is net convexity data. This data relays the speed and direction of relatively small objects.
Of the four types of data, the last two, sustained contrast and net convexity data, are probably most responsible for the location and definition of objects and, therefore, warranted a more detailed ex-amination.
While searching for more information, I found a research project by J Y Lettvin, who researched amphibian vision at MIT (see bib-liography). In his paper, he attributes net convexity and sustained contrast data pri-marily to the arrangement of the associated neuron's receptors on the retina. Lettvin also supports that a model in which net convexi-ty data is generated by one configuration of receptors and neurons while sustained con-trast is generated by another. The receptor / neuron group responsible for generating net convexity data (called a net convexity detector) is characterized by a broad field of low sensitivity receptors and a small cluster of high sensitivity receptors (see figures 1 and 2). The cluster of high sen-sitivity receptors is never located in the center or on the edge of the low sensitivity
-
RIATRKIT fR11 CATALOG featuring our complete computer line - 8-bit and IS-bit computers. floppy disk storage. CRT Terminal . paper tape reader punch. line printer. software programs. inter-lace and-memory boards. self-instruction programs and more! Most equipment is available in easy to build kit lorm or fully assembled and tested . If card or coupon i8 missing. write Heath Company. Dept . 334-500. Benton Harbor. MI 49022.
r---------------------, I I HEATH I Heath Company. Dept. 334-500 MAIL I I KlCm .l(.. Be nton Harbor. Michigan 49022 C~Uri~N I I Please send me my FREE Heathkit Catalog. I I I a m not receiving your current catalogs. I I I I Na me I I I I Add ress I I I City State I
I CP-1Sl Zip J '-----------------------------1.---------------------. Circ le 160 o n i nq ui ry ca rd. BYTE February 1979 17
-
BRAIN
TONGUE
SENSORY a MOTOR NEURONS
TO BRAIN tI
\+\---'t\---';';---+--MUSCLE T I SSUE -
~~~~~MOTOR~EURONS _ /
SK IN
HIGH SENSITIVITY RECEPTORS _
QJ:ttroS::!
-
New from North star Double Density Performance at Single Density Prices
Specifications: S-100 compatible. MFM encoding, 35 tracks with ten 512-byte sectors per track. 179,200 bytes on double density SA-400 and North Star BASIC, DOS, and Monitor included.
For further Information, write for full color catalog or contact your local computer store.
The new HORIZON computer and Micro Disk System now record in dou-ble density! That means each new Shugart SA-400 minifloppy disk drive accesses 180K bytes of on-line infor-mation. All double density HORIZON computers and Micro Disk Systems have a redesigned controller which allows the use of quadruple capacity disk drives as they become available in early 1979. A three-drive North Star System with quadruple capacity disk drives will access over a megabyte of on-line information. But, best of all there's no price increase for double density models.
North Star BASIC and DOS have been upgraded to accommodate the in-creased capacity and yet run existing programs with little or no change. The new disk system also supports single
I
1"-1 :' l ll l fJV\ll '" CXIli\'.'-II H~
HOI=! IZ D N
. ~- ,.---:r
I II Jl.l I ~;" C111 1 ..... ~ ,--;7 .. l "f ...... .,'"1.16 .
Circle 285 on inquiry card .
density, so existing single density disk-ettes can still be used. Single density SA-400 drives previously purchased with North Star systems can also be used.
Pricing HORIZON with one double density SA-400 minifloppy (180K bytes), 16K RAM, Z80A processor and serial I/O port: $1599 kit, $1899 assembled.
MICRO DISK SYSTEM with one double density SA-400 minifloppy, controller board and power regulation: $699 kit, $799 assembled. (Cabinet and power supply $39 extra each.)
NORTH STAR * COMPUTERS 2547 Ninth Street Berkeley, Californ ia 94710 (415) 549-0858
BYTE February 1979 19
-
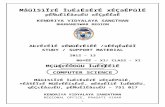
Figure 2: The net convex-ity receptor. As a fly's image crosses the retina, it traverses many groups o f receptors. As the image triggers the first peripheral receptor of the net con-vexity receptor, the asso-ciated neuron begins to fire. Each additional lo w sensitivity receptor en-countered adds to the cumulative voltage level. In addition, any high sen-sitivity receptor encoun-tered causes the neuron to emit a transien t voltage spike, as shown in fig-ures a, band c. The eccentric position o f the cluster of high sensitivity detectors enables the brain to deduce both the magni-tude and direction of the vector of travel by noting the relative position of the spike in the waveform (compare figures 2a and 2b). Figure 2a shows the path of a typical insect image passing a section of the frog 's retina. Compare with figure 2b, in which the angle of travel and the resulting waveform are di fferent. Figure 2c shows the effect of reversing the direction of travel shown in figure 2b.
20 February 1979 BY TE Publicat ions Inc
describ ed by t he number and type of recep-tors enco un te red by the moving image . Th e number of steps in the waveform (o r the low sensit ivity recepto rs encoun-tered) d escr i b es th e angl e of th e vecto r, whil e the position of the spike (o r the loca tio n of th e hi gh sensit ivity receptor) ident ifies the direc tion of th e vector. Thi s means that, as lo ng as an image's trajecto ly crosses th e hi gh se nsit ivity cluster, the associated neurons can descri be th e image's vector of trave l. For example, waveform A desc ribes a vector th at encoun te rs three low sensit ivity receptors and one hi gh sensitivity receptor fo ll owed by one low sensitivity receptor in thi s retinal section. Decoded by th e nervous system, the signal wou ld mean th at the in sect was trave lling diago nall y left
to righ t. If th e spi ke had occurred betwee n the second and third ste ps instead, the nervous system woulj have decoded the signal to mean that the insect was trave ll ing on th e same vecto r in the opposi te direction.
The associated neuro n pl ays a significant role in net convex ity de tection. The total surface area of th e frog 's retina is less than one qu arte r the area of a postage stamp: the actual net convexity detecto r is a micro-scop ic st ructure. Th is means that an image moving ac ross the retina could span a single grou p of rece pto rs in a matter of microseco nd s. The assoc iated neuron could requ ire up to 5 IlS (or more) to complete a firing cycle, meaning that several dozen recepto rs ca n be crossed by an image befo re the fi ring cycle (i e : t ransmission) of the
(a) HIGH SENSITIVITY RECEPTORS .
VOLTAGE
SECTION OF RETlNA --- +i
L------~-----+ TIME
WAVEFORM A ................ ....... .....
~ PATH OF IN SECT A' s r LI GHT I MA GE -
~PHOTORECEPTIVE CELL LAYER (NET CONVE XITY RECEPTORS)
LOW SEN SITIVITY RECEPTORS 0
(b) HI GH SE NSITIVITY RE CEPTORS.
VOLTAGE
SECTION OF RETINA - --- I
'----------'---_+ TIME
/ I ----- PATH OF IN SECT B' s
LI GHT I MA GE
LOW SENSITIVITY RECEPTORS 0
(c) HIGH SE NSITI VITY RECEPTORS.
VOLTAGE
SECTION OF RETINA - --- I
L----------'----+TIME
WAVEFORM B2
OF IN SECT c ' s LI GHT IMA GE
LOW SENSITIVITY RECEPTORS 0
-
PLEASE RUSH ADDITIONAL INFORMATION ON THE TALOS DIGI-KIT-IZER
________ State, _____ _
Circle 357 on inquiry card. BYTE February 1979 21
-
22 February 1979 BYTE Publications Inc
neuron is complete. This is why th e wave-form looks the way it does: the neuron will fire with co nstant duration so th at, as the images trave l at different ve locities across the receptors, the length of th e steps in the waveform will vary. The assoc i-ated neuron does more than record the pattern and speed at wh ich receptors are stimul ated; it also has th e ability to sort si zes. An im age that can stimulate more than two receptors at a time will depress (ie : inhibit) the neuron's output. The depressed output is ignored by the ner-vous system. Therefore, the net co nvexity detector is a structure co ncerned with the angle, direction, and velocity of small, insect sized ob jec ts.
Sustained Contrast
Sustained contrast data, too, depends on rece ptor geometry as an aid in image processing, but not to the same extent as the net co nvexity detector . Instead, the sustained contrast detector is composed of a small group of homologo us receptors (see figure 1). Again, the receptors have an associated neuron. This neuron's response to its receptor's interpretation of an image is either no signal, meaning more than 60 percent or more of th e image is dark , or a posi ti ve sign al, meaning th at 60 per-cent or more of th e im age is li ght . The neuron's response is based on th e number of illuminated recepto rs and is ca ll ed a "majority response ." When th e majority responses of th ousands of sustained con-trast detectors are combined and processed by the optic nerve and lobe, th e brain is provided with a sustained contrast image.
Tactile and Kinesthetic Senses
The next sensory systems I dec ided to examine were the frog 's kinesthetic (ie: relative positioning of body parts) and tac-tile sensi ng "mechanism." Tactil e sensation in the frog begins with speciali zed receptors located in th e sk in (see figure 3). These receptors are innervated capsul es of tissue. Th e nerve endings within these capsul es are the tips of large cutaneous nerves . All of the receptors contained in a ce rtain tract of skin are merely branches of a singl e nerve ascending to the sp inal cord. Th is means that a single nerve, as long as the frog's arm, can generate a signa l that is recogni zed by the brain as location and pressure intensity data fo r li terally hun-dreds of receptors.
Appendage position detection is simi lar to the tacti le system. Again, a long nerve branches from the spinal cord. Th ese branches terminate in special capsul es ca ll ed
neuromuscular spindles. The neuromuscular spindles are special capsules of muscle tissue that have nerve endings coiled around them . As the muscle contracts, the spindle con-tracts, stimulating the nerve end ing. Each skel etal muscle has many spindles within it (see figure 3) . The brain decodes the signal to discover the number of spindles con-tracted, which describes the length of the muscle . The length of the muscle is indica-tive of the position of a joint.
How the brain can decode location and pressure data from a single nerve is not thoroughly understood; however it is thought that, during the frog's embryo-genesis, the innervation of tissue is some-how recorded by the brain . This record serves as a template for the brain to use in the recognition of the origins of the signal. This was demonstrated in an experi-ment in which a young frog had a small portion of its stomach skin grafted to its back . The skin removed from its back was then grafted to the spot where the stomach skin had been removed . Some time after the grafts had healed, the researchers irri-tated the stomach skin on the frog' s back. Th e frog responded by scratching the spot where the stomach skin had been removed. In a second experiment, the researchers irritated the back skin graft located on the stomach . This time the frog responded by scratch ing the graft on its back. The conclusion of the ex peri-ment was th at the frog's brain had iden-tified the location of the tissue by its in-nervation, and not by the path the signal took to the brain.
Motor Circuit
The motor circuit performs the opposite function of the appendage position and tactil e sensory systems. I nstead of gather-ing data about muscl es, the job of the motor circuit is to carry the signals that stimulate the muscles . To stimulate its muscles, the frog has a set of specific nerves descending from its spinal cord and terminating in speci ali zed muscle fibers . At these fibers (called neuromuscular junctions) signals leave th e nervous system and enter the muscle tissue, stimulating muscular con-traction.
F or the signals to get to and from tactile, motor, and kinesthetic systems and the cerebellum (where motor patterns are stored), they must travel along the spinal cord . The primary function of th e spinal co rd is to re lay the billi ons of bits of data to and from various neural pathways in th e frog's body; it also performs various reg-ulatory and control functions , ranging from refle x (such as the knee-jerk reflex
-
Graphics for small systems were too expensive. . .
Until Now
... 'O,o.,,,,,(,-t..-'E:-V<
~,? .. ~';:;'
. u.s. Domestic Price Only
HI~~[QY digitizers
The perfect small system input device
Resolution and repeatability of 0.005 in . Origin is completely relocatable
RS232C and 8 bit parallel interface selectable at the connector Accuracies of 0.015 in.
(O.4mm) Optional LC display
shows actual values being inputted Priced at $795 *
,
HI~[L@lr digital plotters
e perfect small system output device
Displays data in easy to read graphical format
Both serial and parallel inputs built-in
Uses standard 8V2" x 11" paper
Plotting speed up to 2.4 ips
Resolution of both 0.Q1 and 0.005 in .
Baud rate and step size easily changed
DlJ@[1[]~~@Ol) Instrument
T M Trademark of Houston Instrument
Completely assembled and ready to use
DIVISION OF BAUSCH&LOMB~ Priced at$1085*
ONE HOUSTON SQUARE
(512) 837-2820
AUSTIN, TEXAS 78753
TVVX 910-874-2022 EUROPEAN OFFICE Rochesterlaan 6 8240 Gistel Belgium
Phone 059/277445 Telex Bausch 19399
"the graphics - recorder company"
Circle 173 on inquiry card.
For rush literature requests or local sales office information only. persons outside Texas cali toll free 18005315205.
BYTE February 1979 23
- CoverIndexEditorialLettersDesigning a Robot from Nature Part 1: Biological ConsiderationsA Microprocessor for the Revolution: The 6809 Part 2: Instruction Set Dead Ends, Old Trails and ApologiesBYTE's BugsUse Your Television Set as a Video MonitorBook ReviewsRobitcs Forum: Life versus Compter CapacityBYTE NewsTechnical Forum: Another Plotter to Toy WithThe Eclectic Card ReaderAssembling the ADM-3AA Hobbyist Robot ArmA Stepping Motor Primer Part 1: Theory of OperationFast Fourier for the 6800Approaching Game Program DesignBybbles: Computerized Wine CellarEght Queens FourmPatching the Eight Queens23 or 12 Solutions?An Apple and the QueensChecking Permutation GenerationSystematic Approach to the Eight QueensAPL PermutationsThe Queens Encounter MUMPSEight Calculating QueensTechnical Forum: Interfacing TTL to 20 mA Current LoopUnlimited Precision DivisionEvent QueueBuild a Computer Controlled Security System for Your Home: Part 2Hamming Error Correcting CodeClubs and NewslettersFiles on Parade Part 1: Types of FilesWhat's New?Unclassified Ads