
BVH
20
BVH Student: Jack Chang
-
Upload
halla-hobbs -
Category
Documents
-
view
21 -
download
0
description
BVH. Student: Jack Chang. Introduction. Problem: Ray intersection test needs to go through each objects Cost: O(n) Solution approaches: Spatial subdivision Primitive subdivision. Spatial subdivision. Such as… Uniform grid K-D tree Oct-tree. Uniform grid. Oct-tree. - PowerPoint PPT Presentation
Transcript of BVH

BVHStudent: Jack Chang

Introduction• Problem:
• Ray intersection test needs to go through each objects• Cost: O(n)
• Solution approaches:• Spatial subdivision• Primitive subdivision

Spatial subdivision• Such as…
• Uniform grid• K-D tree• Oct-tree
Uniform grid Oct-tree

Primitive subdivision
• Instead of working with space, work with the problems themselves.
• In 1976, James Clark proposed the first hand-constructed BVH.

BVH • Key questions
• How to define the bounding volume?• How to construct the hierarchy?• How to search the hierarchy?

1. Definition of bounding volume• Types
• Sphere• AABB ( Axis aligned bounding box)• OBB (Oriented bounding box)• K-Dop (K direction discrete orientation polytope)

AABB• 3 common representation
• Min Max• Min HWD• Center Radius
Point min;Point max;
Point min;float d[3];
Point c;float r[3];

Kay–Kajiya Slab-based Volumes • Kay–Kajiya Slab-based Volumes (1986)
struct Slab {
float n[3];float dNear; float dFar;
};

Kay–Kajiya Slab-based Volumes • Kay–Kajiya Slab-based Volumes (1986)

K-DOP• Similar to the Kay-Kajiya’s slab-based volume
• But normal are defined as fixed set of axes shared among all BVs.
struct DOP6 {
float min[3];float max[3];
};

Which bounding volume is best?• It depends…

2. Hierarchy construction• 3 approaches
• Top-Down• Bottom-Up• Insertion

2. Hierarchy construction• 3 approaches
• Top-Down• Bottom-Up• Insertion

2. Hierarchy construction• 3 approaches
• Top-Down• Bottom-Up• Insertion

Top-Down construction• Recursive procedure• Splitting hyperplane to divide the input set.

Rearrange & Partition• Choice of Axis
• Local x, y, and z coordinate• Axis through the two most distant points

Rearrange & Partition• Choice of splitting point
• Objects Median• Objects Mean• Spatial Mean
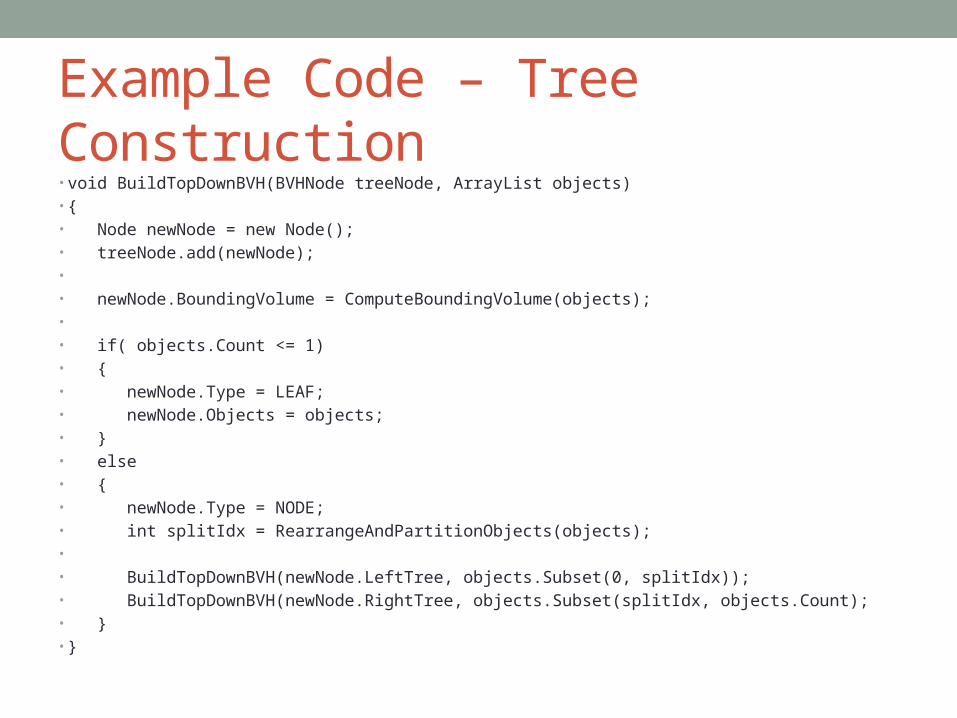
Example Code – Tree Construction• void BuildTopDownBVH(BVHNode treeNode, ArrayList objects) • {• Node newNode = new Node();• treeNode.add(newNode);•
• newNode.BoundingVolume = ComputeBoundingVolume(objects);• • if( objects.Count <= 1) • {• newNode.Type = LEAF;• newNode.Objects = objects;• } • else • {• newNode.Type = NODE;• int splitIdx = RearrangeAndPartitionObjects(objects);• • BuildTopDownBVH(newNode.LeftTree, objects.Subset(0, splitIdx));• BuildTopDownBVH(newNode.RightTree, objects.Subset(splitIdx, objects.Count);• }• }

3. Hierarchy search• 2 fundamental tree traversing
• BFS ( Breadth first search )• DFS ( Depth first search )

Summary• What I have talked about…
• Definition of bounding volume• Hierarchy construction• Hierarchy search
• And what I have NOT talked about…• SAH ( Surface area heuristic )• Compact BVH• Informed traversal
![OLBVH: octree linear bounding volume hierarchy for ......ric meshes. We introduce a novel octree-based linear BVH (OLBVH) based on the linear BVH (LBVH) by Lauterbach et al. [12].](https://static.fdocuments.in/doc/165x107/61468af37599b83a5f004a0d/olbvh-octree-linear-bounding-volume-hierarchy-for-ric-meshes-we-introduce.jpg)





![BADF: BVH-Centric Adaptive Distance Field Computation for ...iccvm.org/2020/docs/paper5.pdfKarras et al. [15] construct the BVH in parallel. That algorithm detects all the edges and](https://static.fdocuments.in/doc/165x107/61468aec7599b83a5f004a09/badf-bvh-centric-adaptive-distance-field-computation-for-iccvmorg2020docs.jpg)









![Incremental BVH Construction for Ray Tracing91 and Laine [1] targeted optimization of BVH traversal on the 92 GPU. Wald studied the possibility of fast rebuilds from scratch 93 on](https://static.fdocuments.in/doc/165x107/61468afc7599b83a5f004a11/incremental-bvh-construction-for-ray-tracing-91-and-laine-1-targeted-optimization.jpg)
