
Build EV
55
Make: EV
-
Upload
abhijeet-khandagale -
Category
Education
-
view
15 -
download
0
Transcript of Build EV

Make: EV

why are you here?

Hybrid VehiclesTHE BEGINNING.




Electric VehiclesTHE CRAZE.

SE-3 Patroller by Segway
Convertible E- Bike

Bikes or Cars?What’s your favourite?

Mission Motors | Mission R | 14kWh | 141 HP | 160+ mph

Rimac | Concept_one Model S P85D | 762 hp | 0 to 60mph in 2.8s


EeVeeTHE TECH.




MOTORS
Basics
AC Motors
Hub Motors
DriveTrain
Motor Control

Motors: Basics.
Fleming’s Left Hand Rule!

AC Motors

Hub Motors

Motors: Drivetrain.

Motors: Drivetrain.Tank to Wheel-
Motor Efficiency - 90% Inverter Efficiency - 95% (DC to AC conversion) Battery Leakage - 90% Charging Efficiency - 95%
Actual Battery - 80% & Charger Eff
Overall - 70%
Well to Wheel-
Generator Efficiency - 50% Power line Efficiency - 95% T2W Efficiency - 70%
Overall 33%
Gasoline T2W - 16% W2W - 14%

Motors: Control.


BATTERY
Basics
Li-ion
BMS
Charging Systems

Battery: Basics.

Battery: BMS
Cell Protection
Charge Control
Demand Management
SOC
SOH
Cell Balancing






CONTROLS
Basics
CU
CAN Protocol
Motor Control
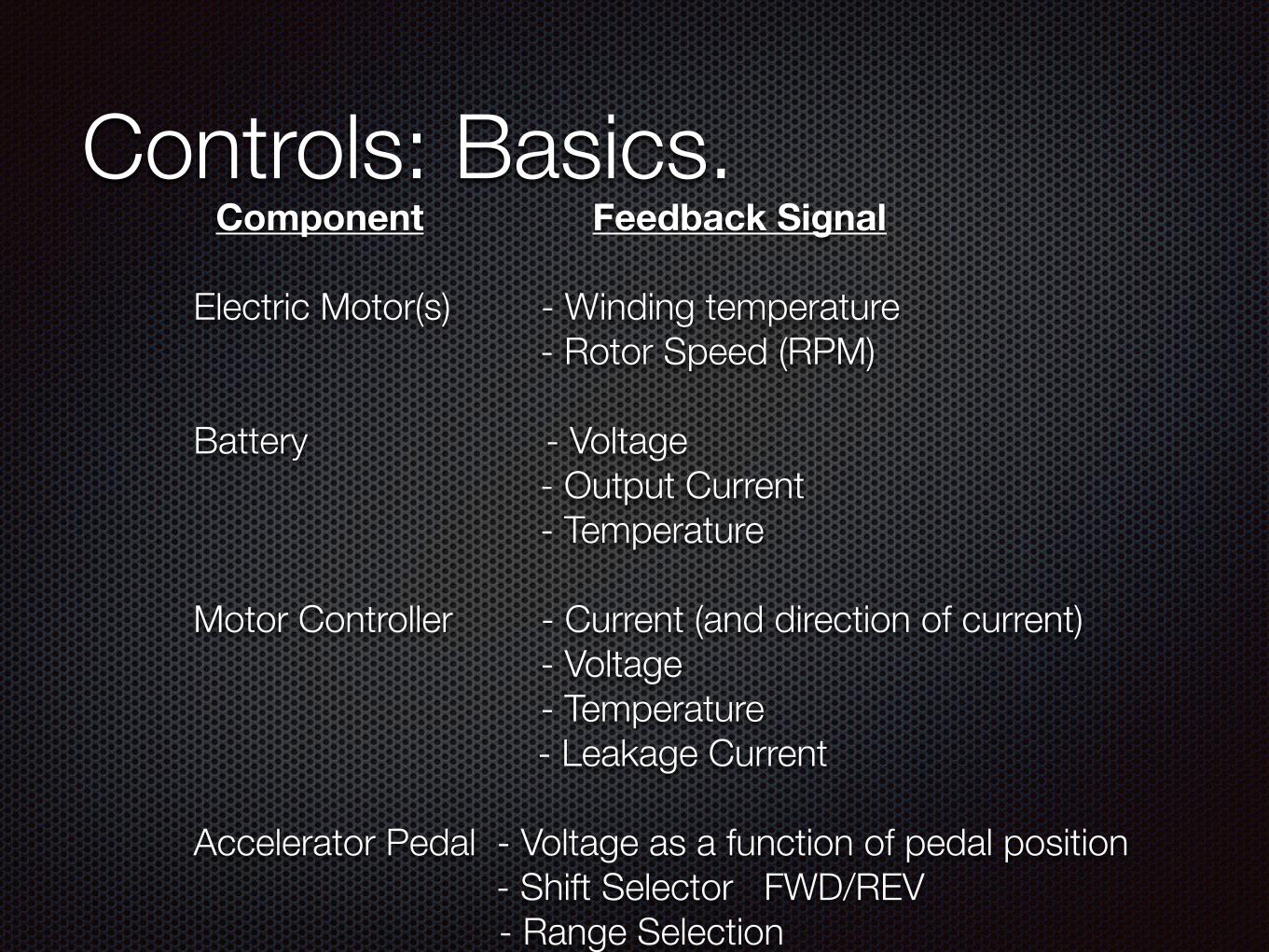
Controls: Basics.Component Feedback Signal
Electric Motor(s) - Winding temperature - Rotor Speed (RPM)
Battery - Voltage - Output Current - Temperature
Motor Controller - Current (and direction of current) - Voltage - Temperature
- Leakage Current
Accelerator Pedal - Voltage as a function of pedal position - Shift Selector FWD/REV
- Range Selection





CAN Bus The physical layer uses differential transmission on a twisted pair wire.
A non-destructive bit-wise arbitration is used to control access to the bus.
The messages are small (at most eight data bytes) and are protected by a checksum.
There is no explicit address in the messages, instead, each message carries a numeric value which controls its priority on the bus.
An elaborate error handling scheme that results in retransmitted messages when they are not properly received.
There are effective means for isolating faults and removing faulty nodes from the bus.


Design.CONCEPTS





Partners

AI Labs

VAH Analytics
Taleho
Hashtag Loyalty
Superfan
Faclon
ReDesyn
Maker’s Asylum

Design Contest
















![How to [and not to] Build an Electric · PDF fileElectric Motorcycle Zachary Rubin. Why Build an EV?](https://static.fdocuments.in/doc/165x107/5a7abc3c7f8b9a0a668b7f01/how-to-and-not-to-build-an-electric-motorcycle-zachary-rubin-why-build-an-ev.jpg)




