Brandon Williams- Low Dimensional Topology
126
Low Dimensional Topology Brandon Williams [email protected] November 25, 2008 Contents 1 Transversality and Intersection Theory 3 1.1 Immersions, Submersions and Transversality ....................... 3 1.2 Intersection Theory ..................................... 6 2 Knot Theory 7 2.1 Basic Definitions ...................................... 7 2.2 The Alexander Polynomial ................................. 13 2.3 Knot Signatures and 4-Ball Genus ............................ 17 2.4 Cyclic and Branched Covers ................................ 20 2.5 Applications ......................................... 22 2.6 Knots in other 3-Manifolds ................................ 24 3 Handlebodies 26 3.1 Handlebody Decompositions ................................ 26 3.2 Handle Moves ........................................ 31 3.3 The Fundamental Group and Homology of a Handlebody ............... 33 3.4 2-Dimensional Handlebodies ................................ 34 3.5 Heegaard Diagrams ..................................... 34 3.6 Kirby Diagrams ....................................... 41 4 Morse Theory 43 4.1 Morse Functions ...................................... 43 4.2 Handlebody Decompositions Induced by Morse Functions ............... 46 4.3 Properties of Gradient Flows ............................... 48 4.4 Existence of Morse Functions ............................... 49 5 Kirby Calculus 52 5.1 Surgery on Links ...................................... 52 5.2 Kirby Moves ........................................ 55 5.3 The Rational Calculus ................................... 58 6 4-Manifold Theory 60 6.1 Intersection Forms on 4-Manifolds ............................ 60 6.2 Kirby Calculus Reinterpreted ............................... 63 1
Transcript of Brandon Williams- Low Dimensional Topology

Low Dimensional Topology
Brandon [email protected]
November 25, 2008
Contents
1 Transversality and Intersection Theory 31.1 Immersions, Submersions and Transversality . . . . . . . . . . . . . . . . . . . . . . . 31.2 Intersection Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Knot Theory 72.1 Basic Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 The Alexander Polynomial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Knot Signatures and 4-Ball Genus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Cyclic and Branched Covers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.5 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.6 Knots in other 3-Manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Handlebodies 263.1 Handlebody Decompositions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2 Handle Moves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.3 The Fundamental Group and Homology of a Handlebody . . . . . . . . . . . . . . . 333.4 2-Dimensional Handlebodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.5 Heegaard Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.6 Kirby Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Morse Theory 434.1 Morse Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2 Handlebody Decompositions Induced by Morse Functions . . . . . . . . . . . . . . . 464.3 Properties of Gradient Flows . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.4 Existence of Morse Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 Kirby Calculus 525.1 Surgery on Links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.2 Kirby Moves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.3 The Rational Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6 4-Manifold Theory 606.1 Intersection Forms on 4-Manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.2 Kirby Calculus Reinterpreted . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
1

7 Morse Homology 667.1 The Morse-Smale Condition and Moduli Spaces of Flow Lines . . . . . . . . . . . . . 667.2 The Compactness and Gluing Theorems . . . . . . . . . . . . . . . . . . . . . . . . . 717.3 The Morse Complex . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.4 A Natural Isomorphism between Morse and Singular Homology . . . . . . . . . . . . 737.5 Direct Invariance of Morse Homology . . . . . . . . . . . . . . . . . . . . . . . . . . . 747.6 Orientations on Moduli Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817.7 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 827.8 Witten’s Complex . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8 Heegaard Floer Homology 878.1 Construction for 3-Manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 878.2 Invariance of Heegaard Floer Homology . . . . . . . . . . . . . . . . . . . . . . . . . 95
8.2.1 Independence of Complex Structures . . . . . . . . . . . . . . . . . . . . . . . 958.2.2 Independence of Isotopies of Attaching Circles . . . . . . . . . . . . . . . . . 978.2.3 Independence of Handle Slides . . . . . . . . . . . . . . . . . . . . . . . . . . 988.2.4 Independence of Stabilizations . . . . . . . . . . . . . . . . . . . . . . . . . . 101
8.3 The Surgery Exact Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1028.4 The Absolute Q Grading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1098.5 Heegaard Floer Knot Homology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
A Homotopy Groups 117
B Duality Theorems 118
C Cohomology with Homotopy 119
D Homeomorphisms of Surfaces 120
E Some Analysis 121
F Some Exercises 124
References 126
2

1 Transversality and Intersection Theory
1.1 Immersions, Submersions and Transversality
Let f : M → N be a smooth map between smooth manifolds. A point p ∈M is said to be regularif dfp : TpM → Tf(p)N is surjective, otherwise it is said to be critical. The image of a criticalpoint is called a critical value, and a regular value in N is any point that is not a critical value.We say that f is an immersion at p ∈ M if dfp is injective, and a submersion at p ∈ M if dfpis surjective. Recall the inverse function theorem and its corollaries pertaining to immersions andsubmersions.
Theorem 1.1 (Inverse Function Theorem). If dfp : TpM → Tf(p)N is an isomorphism, then f is alocal diffeomorphism at p, i.e. there is a neighborhood U of p and V of f(p) such that f |U : U → Vis a diffeomorphism.
Corollary 1.1. If f : Mm → Nn is an immersion at p ∈ M , then there are coordinates φ :U → Rm around p ∈ M and ϕ : V → Rn around f(p) ∈ N such that ϕ f φ−1(x1, . . . , xm) =(x1, . . . , xm, 0, . . . , 0).
Proof. First let φ and ϕ be any charts such that φ(p) = ϕ(p) = 0, and let g = ϕ f φ−1. Thendg0 : Rm → Rn is injective since f is an immersion, so we can change the coordinates so that
dg0 =(Im0
)where Im is the m ×m identity matrix and 0 is the (n −m) ×m zero matrix. We cannot applythe inverse function theorem to g since m < n, but if we define G : φ(U) × Rn−m → Rn byG(x, z) = g(x) + (0, z), then dG0 = In. So G is a local diffeomorphism, and G ϕ is anotherchart around f(p) of N . In these coordinates we have that the local representation of f is just(x1, . . . , xm) 7→ (x1, . . . , xm, 0, . . . , 0).
Corollary 1.2. If f : Mn → Nm is an submersion at p ∈M , then there are coordinates φ : U → Rn
around p ∈M and ϕ : V → Rm around f(p) ∈ N such that ϕ f φ−1(x1, . . . , xn) = (x1, . . . , xm).
Proof. First let φ and ϕ be any charts such that φ(p) = ϕ(p) = 0, and let g = ϕ f φ−1. Thendg0 : Rn → Rm is injective since f is a submersion, so we can change the coordinates so that
dg0 =(Im 0
)where Im is the m ×m identity matrix and 0 is the m × (n −m) zero matrix. We cannot applythe inverse function theorem to g since m < n, but if we define G : Rn → ϕ(V ) × Rn−m byG(x1, . . . , xn) = (g(x), xm+1, . . . , xn), then dG0 = In. So G is a local diffeomorphism, and G−1 φis another chart around p of M . In these coordinates we have that the local representation of f isjust (x1, . . . , xn) 7→ (x1, . . . , xm).
Corollary 1.3. If q is a regular value of f : Mn → Nm, then f−1(q) is a submanifold of M withcodim f−1(q) = m.
Proof. Let p ∈ f−1(q), then f is a submersion at p, so by corollary 1.2 we can find coordinatesφ : U → Rn around p and ϕ : V → Rm around q such that ϕf φ−1(x1, . . . , xn) = (x1, . . . , xm) andϕ(q) = (0, . . . , 0). Thus for x ∈ U and f(x) = q we have φ(x) = (0, . . . , 0, xm+1, . . . , xn) for somexm+1, . . . , xn. So φ restricted to U ∩ f−1(q) provides a chart of the relatively open set U ∩ f−1(q)into Rn−m, making f−1(q) into a submanifold of dimension n−m.
3

Consider the following simple application of corollary 1.3. For real-valued functions f1, . . . , fk :M → R, when is the set Z of common zeros a manifold? If we set f = (f1, . . . , fk) : M → Rk,then it is clear that f−1(0) is a manifold if 0 is a regular value of f . Another way of looking atthis is to see that dfp = ((df1)p, . . . , (dfk)p) : TpM → Tf(p)Rk, and this is surjective if and onlyif (df1)p, . . . , (dfk)p are linearly independent functionals. When this happens we say f1, . . . , fk areindependent at p, and so we have the following corollary.
Corollary 1.4. If f1, . . . , fk : M → R are independent at all points where they simultaneouslyvanish, then the set of common zeros Z is a submanifold with dimZ = dimM − k.
In the case of the above corollary we say that the submanifold Z has been cut out by thefunctions f1, . . . , fk. However, not every submanifold can be globally cut out by independentfunctions.
Now that we know the pre-image of regular values are submanifolds, we naturally wonder if thepre-image of submanifolds are submanifolds. Two smooth maps f : M → N and g : L → N aresaid to be transversal if at any point p ∈M and q ∈ L for which f(p) = g(q) we have
dfp(TpM) + dgq(TqN) = Tf(p)N
and we denote this by f t g. Note that the above sum does not have to be direct, and in factmost of the time will not be. If g is just the inclusion of a submanifold L of N , then we say f istransverse to L and write f t L. If f is also an inclusion of a submanifold M of N , then we saythe submanifolds M and L are transversal, and write M t L.
Proposition 1.1. If f : M → N is transverse to a submanifold L in N , then f−1(L) is a subman-ifold of M with codim f−1(L) = codimL. In particular, if two submanifolds M and L of N aretransversal, then M ∩ L is another submanifold of N and codim(M ∩ L) = codimM + codimL.
An important feature of immersions, submersions, transversal intersections and embeddings isthat they can be “perturbed” slightly, and they will remain in their respective class. To makethis precise we need to define what we mean by perturbation. Fix a smooth map f0 : M → N ,and let F : M × [−1, 1] → N be a smooth map such that F (−, 0) = f0. In fact, we will use thenotation ft = F (−, t). Then any of the smooth maps ft : M → N for t ∈ [−1, 1] are called smoothperturbations of f0; that is, we just smoothly homotoped f0 a little bit. We say that a statementP defined on the space of smooth functions C∞(M,N) is stable if for every f ∈ C∞(M,N) suchthat P (f) and every family of perturbations F of f , then there is a small enough ε such that P (ft)for all |t| < ε.
Theorem 1.2. Let M be compact. The following statements are stable as statements on C∞(M,N).
1. P (f) = f is an immersion.
2. P (f) = f is an submersion.
3. P (f) = f is a local diffeomorphism.
4. For a fixed submanifold Z ⊂ N , P (f) = f is transversal to Z.
5. P (f) = f is an embedding.
6. P (f) = f is an diffeomorphism.
4

Proof.
1. Suppose f0 : Mm → Nn is an immersion, and take a family F : M×[−1, 1]→ N perturbationsof f0, i.e. F (−, 0) = f0. The result will follow if we prove every point (x, 0) ∈ M × [−1, 1]has an open neighborhood Ux such that dfp is injective for all p ∈ U . For then we cantake their union U = ∪xUx and choose an ε > 0 small enough so that M × (−ε, ε) ⊆ U .Since this is now just a local question we might as well assume M is an open subset of Rm
and N is an open subset of Rn. Since (df0)x is injective, we have that the Jacobian matrix(∂(f0)i/∂xj(x))ij contains at least m linearly independent columns. We can of course assumethat these columns are the first m columns of the Jacobian. If we consider the Jacobian as afunction of (x, t) ∈ X × [−1, 1], then we see that the determinant of the first m columns is asmooth function that is not equal to zero at (0, x), hence we can find an ε > 0 small enoughso that it is not zero for (t, x), |t| < ε. Therefore all the ft’s are immersions for |t| < ε.
2. The proof of this identical to 1 as now the Jacobian has n linearly independent rows.
3. This follows directly from 1 since a local diffeomorphism is just an immersion for whendimM = dimN .
4. The condition of being transverse has an equivalent reformulation in terms of local submer-sions, so this follows from 2.
5. Recall that an embedding is a proper, injective immersion f0 : M → N . Since M is compact,f0 is automatically proper, so we only need to prove that if f0 is injective, then ft is injectivefor |t| less than some small ε > 0. We prove this by contradiction, so we can assume there isa sequence of numbers ti → 0 and distinct points xi 6= yi such that fti(xi) = fti(yi). Since Mis compact we can pass to a subsequence such that ti → 0, xi → x, and yi → y. If we definethe function G : M × I → N × I, then we have G(xi, ti) = G(yi, ti) (by definition), hence
G(x, 0) = limi→∞
G(xi, ti) = limi→∞
G(yi, ti) = G(y, 0)
Since f0 is injective this implies x = y. The Jacobian of G at (x, 0) is in block form∗
d(f0)x...∗
0 · · · 0 1
But, d(f0)x is injective, hence dG(x,0) has at least m + 1 linearly independent columns andso G is an immersion at (x, 0). This will remain true in a small neighborhood of (x, 0),which must contain the points (xi, ti) and (yi, ti) for large enough i. This contradicts thatG(xi, ti) = G(yi, ti), therefore no such sequence can exist, and so ft is injective for |t| smallenough.
6.
Now let us extend the ideas of transversality to manifolds with boundary. For a manifold Mwith boundary, and a smooth map f : M → N , the restriction of f to the boundary ∂M will bedenoted by ∂f .
UNFINISHED
5

1.2 Intersection Theory
Recall the following classification of 1-dimensional manifolds and one of its immediate corollaries.
Proposition 1.2. Every compact 1-dimensional manifold is homeomorphic to a disjoint union ofcircles and closed intervals.
Corollary 1.5. The number of boundary components of any compact 1-dimensional manifold iseven.
Consider a smooth map f : M → N , with M compact, and submanifold Z ⊆ M . By slightlyperturbing f , if necessary, we can assume f t Z and so f−1(Z) is a submanifold of M . IfcodimZ = dimM , then codim f−1(Z) = codimZ = dimM , hence f−1(Z) is a 0-dimensionalmanifold. Since M is compact, f−1(Z) consists of finitely many points, so we define the mod-2intersection number of f and Z by I2(f, Z) = #f−1(Z) mod 2. This is well-defined by thefollowing proposition.
Proposition 1.3. If f, g : M → N are homotopic, then I2(f, Z) = I2(g, Z) mod 2.
Proof. Let F : M×I → N be a homotopy between f and g. We can perturb F slightly, while keepingF0 and F1 fixed, to make F t Z. Then F−1(Z) is a submanifold of M × I with codimF−1(Z) =codimZ = dimM , hence dimF−1(Z) = 1. The boundary of F−1(Z) consists of
F−1(Z) ∩ ∂(M × I) = F−1(Z) ∩ (M × 0 ∪M × 1) = f−1(Z)× 0 ∪ g−1(Z)× 1
Since #∂F−1(Z) is even, we must have that #f−1(Z) and #g−1(Z) are both even or both odd,hence I2(f, Z) = I2(g, Z) mod 2.
We can define the mod-2 intersection number of two submanifolds W,Z ⊆ M as I2(W,Z) :=I2(i, Z) where i : W → M is the inclusion. Although we can slightly perturb W and Z to createmore intersection points (or remove intersection points), the above proposition says that pointsmust be added in pairs.
UNFINISHED
6

2 Knot Theory
One of the reasons that low dimensional topology is so much harder to study than higher dimensionsis the appearance of knots. In high dimensions one can unravel all knots to become “trivial,” butthis does not happen in 3 dimensions. Fortunately we can get a combinatorial presentation of3-manifolds from knots, but before that we have to cover some basics of knot theory.
2.1 Basic Definitions
Classically, a knot k is just a smoothly embedded copy of S1 into S3. We could also embed ourknots into R3, the theories would turn out to be equivalent, but S3 is easier to think about since itis a nice compact 3-manifold. The complement of a knot in its surrounding manifold is called theknot complement, and its first homology group is quite simple.
Proposition 2.1. If k is a knot in S3, then H1(S3\k) = Z and is generated by any meridian.
Proof. Let U be an open tubular neighborhood of k in S3, and let V be the complement of theclosure of a smaller tubular neighborhood. Then U is homotopy equivalent to S1, V is homotopyequivalent to the knot complement S3\k, and U ∩ V is homotopy equivalent to a torus S1 × S1.The Mayer-Vietoris sequences gives us the following exact sequence
0 −→ H1(U ∩ V ) −→ H1(U)⊕H1(V ) −→ 0
which is just0 −→ Z⊕ Z −→ Z⊕H1(S3\k) −→ 0
This implies that H1(S3\k) = Z. Further, note that this map is of the form (i∗,−j∗), where i and jare the inclusions of U ∩V into U and V , respectively. The group H1(U ∩V ) = Z⊕Z is generatedby a meridian [µ] and longitude [`], and we can choose this longitude such that j∗[`] = 0. Since [`]is mapped to an element generating the first factor of Z⊕H1(S3\k), we have that j∗[µ] generatesthe second factor.
Given two knots k1, k2 in a manifold S3, we say that they are equivalent, or isotopic, if theyare ambiently isotopic. This means that there is a smooth 1-parameter family of maps ϕt : S3 → S3
such that ϕ0 = id, ϕ1(k1) = k2, and ϕt is a diffeomorphism for all time t. A knot that is isotopicto the standardly embedded S1 in S3 is called the unknot or the trivial knot.
There is a nice way to visualize a knot k in S3. First, move the knot a little if needed so thatit does not pass through the point at infinity. Now k is embedded in R3. For a generic plane Πin R3 not intersecting k, the projection D of k onto Π is a closed curve with finitely many doublepoints, and no other types of singularities. We can decorate these double points as an over orunder crossing depending on whether one strand is above another relative to the plane. Such aprojection D is called a knot diagram of k. Conversely, given a closed curve D in the planewhich is embedded on the complement of finitely many double points and whose double points aredecorated with under or over crossings, we can find a knot k such that D is a projection of k.
Clearly a single knot k can admit many different knot diagrams, and so we hope there is a wayto determine when two diagrams correspond to the same isotopy class of knot. It turns out thereare 3 moves one can apply to a knot diagram, called the Reidemeister moves, such that twoknot diagrams D1 and D2 are the diagrams of two isotopic knots if and only if one can get fromone diagram to the other by the Reidemeister moves (see figure 2.1). We will use R1, R2 and R3
7

R1 R1
R2 R2
R3
Figure 2.1: Reidemeister Moves
+1 −1
Figure 2.2: Crossing Signs
to denote these moves. This reduces a lot of knot theory to combinatorial pictures, from which wecan define a lot of knot invariants.
A slight generalization of a knot is a link. An n-component link is a smooth embedding of ncopies of S1. All of the above definitions and discussion has a direct generalization to links. Clearlyif two links L1 and L2 are isotopic, then their number of components must be equal.
One can put an orientation on a knot k by simply choosing a non-vanishing tangent vector fieldon k, or equivalently placing an arrow on any knot diagram of k. A knot has precisely 2 orientationsand an n-component link has 2n orientations. Given a knot diagram D of an oriented knot k, wecan define the sign of each crossing of D. We adopt the right hand rule for sign conventions, whichmeans signs are determined as in figure 2.2. Note that the sign of a crossing is information we getonce we have chosen a knot diagram, not from just a knot. The sum of all the signs of the crossingof a knot diagram D is called the writhe of the diagram, and is denoted by w(D). The writhe of aknot diagram is not a knot invariant because it is not invariant under R1. It is, however, a ribboninvariant, but we will not discuss that here.
Let k be a knot in S3 and D a diagram of k. A resolution of a crossing, or a smoothing, isthe process of removing the double point and reconnecting the strands so that there is no crossing.There are two ways of doing this, called the 0-resolution and 1-resolution, shown in figure 2.3. Each
8

0-resolution
????????
????????
crossing 1-resolution
Figure 2.3: Ways to resolve a crossing
time one resolves a crossing the number of components of the diagram either stays the same orincreases by one. A resolution of a diagram is the diagram resulting from resolving all crossings,which is just a finite collection of disjoint circles. Clearly if there are n crossings in the diagram D,then there are 2n resolutions, which are parameterized by 0, 1n. If the knot k has an orientation,then there is a canonical resolution of D, called the oriented resolution, where we resolve all thecrossings of sign +1 by a 1-resolution and all crossings of sign −1 by a 0-resolution.
A Seifert surface for a link L in S3 is a smoothly embedded, compact, connected and orientablesurface F in S3 with boundary such that ∂F = L.
Proposition 2.2 (Seifert’s Algorithm). Every link L in S3 has a Seifert surface.
Proof. We can construct the surface explicitly. Choose any orientation on L and let D be a diagramfor L. Let D′ denote the the oriented resolution of D. Fill each component of D′ so that there is adisc for each circle, and connect the discs a twisting band for each crossing. The result is a surfacewith boundary equal to exactly L.
Any link has many Seifert surfaces, and Seifert’s algorithm almost never produces the surfaceof minimal genus. We define the genus of a link L to be the minimum of genera of Seifert surfacesof L, and is denoted by g(L). The four-ball genus of L is the minimum of genera of compact,connected, oriented and smoothly embedded surfaces in D4 whose boundary is L ⊂ ∂D4 = S3, andis denoted by g∗(L).
Lemma 2.1. Let k1, k2 be two knots embedded in S3. Then the genus satisfies g(k1#k2) = g(k1) +g(k2).
Proof. We can think of k1 and k2 embedded in the same sphere, but situated far apart. Let F1 andF2 be Seifert surfaces of minimal genus for k1 and k2, respectively. Then the boundary sum F1]F2
is a Seifert surface of k1#k2, and so we have proved
g(k1#k2) ≤ g(k1) + g(k2)
To prove the other inequality we fix a Seifert surface F of minimal genus for k1#k2. We can fixa 2-sphere Σ in S3 so that Σ∩k1#k2 consists of two points. Then, if the two arcs of k1#k2 betweenthese two points are labelled α1 and α2, and we take a small arc β in Σ between these two points,then the curve α1 + β is k1 and the curve α2 + β is k2. By perturbing Σ slightly we can guaranteethat Σ ∩ F is just a collection of closed curves, as well as the curve β. We will perform surgery onthese closed curves one by one to remove these intersections, so that the only intersection pointsleft is the arc β.
9

Let C be one of these closed curves with the additional property that the disc it bounds in Σdoes not contain any of the other closed curves. These ensures that if we push the interior of thisdisc a little off of Σ (in either direction) it does not intersect F . Let F be the surface obtained fromF by cutting out an open annulus around C (so now there are two more boundary components)and gluing in two discs, each parallel to the disc in Σ bounded by C, and on either side of Σ. Theresult is another Seifert surface F of k1#k2. If the curve C does not separate F , then F will havegenus one less that F (we just cut open a handle!), which is not possible since F is assumed tohave minimal genus. So, we must have that C separates F , hence F consists of a disjoint union ofa 2-sphere and a Seifert surface of k1#k2 that has one less intersection with Σ. Repeating this forall the closed curves in Σ ∩ F shows that we can assume that Σ and F intersect only at the arc β.
Now we can take F1 to be the closure of the part of F outside of the sphere Σ, and F2 the closureof the part of F inside the sphere. Then F1 and F2 are Seifert surfaces of k1 and k2 respectively,hence
g(k1) + g(k2) ≤ g(k1#k2)
Given disjoint, oriented knots k1 and k2, let D be a common projection. We can assign signs tothe double points of D just as before, except now the two strands might belong to different knots.The linking number lk(k1, k2) of k1 and k2 is defined to be the sum of the signs of all crossingswhere k1 passes under k2. In order to show that this definition is well-defined we need to see thatit does not depend on the diagram chosen for k1 ∪ k2. It is an easy matter to show that lk(k1, k2)is invariant under the Reidemeister moves, hence lk(k1, k2) is an invariant of the isotopy class ofk1 ∪ k2. It is also easy to check that lk(k1, k2) = lk(k2, k1) and lk(−k1, k2) = − lk(k1, k2), where−k1 is the knot k1 with opposite orientation.
There are two other ways of describing the linking number that will be useful later. Let L =k1 ∪ k2 be the link with components our knots, and let F be a Seifert surface for L. At each pointon the boundary k1 in F we have a tangent vector τ that determines the orientation of k1 anda vector ν pointing into the surface. Let n be a vector normal to F such that the ordered basis(τ, ν, n) matches with the orientation of S3. The normal vector n can be extended to the rest ofthe surface F , and it determines an orientation. We can perturb k2 slightly if needed so that k2
intersects L transversely in finitely many points. If we assign these points the sign +1 when k2’stangent vector points in the same direct as n and −1 when it points in the opposite direction, thenlk(k1, k2) is equal to the sum of these numbers.
The second way is to notice that the first homology of the knot complement H1(M\k1) = Zis generated by the homology class [µ] of any meridian µ of k1. The other knot k2 determines ahomology class [k2] ∈ H1(M\k1), which must be an integer multiple of [µ]. The linking numberlk(k1, k2) is precisely this number, i.e. [k2] = lk(k1, k2) · [µ].
A framing for a knot k in S3 is a choice of a normal vector field along k. If X is a framing of k,then we can push k a little bit in the direction of X to get a new knot k′, and the integer lk(k, k′)is called the framing number or framing coefficient of X. Conversely, given an integer n wecan find a parallel k′ of k such that lk(k, k′) = n, and this curve is unique up to isotopy in S3\k.So, we can think of framings as either normal vector fields, parallel knots, or just integers assignedto knots. A knot with a framing is called a framed knot, and a framed link is defined similarly. Foran oriented, framed link L with components L1, . . . , Ln we define its linking matrix [L] to be thesymmetric matrix with (i, j)-entry equal to lk(Li, Lj), where we use the convention that lk(Li, Li)is just the framing of the i-th component of L.
10

Figure 2.4: Examples of the canonical longitude and a non-canonical longitude
Given a knot k in S3 the meridian µ of ∂N(k) chosen above is called the canonical meridian,and is always defined. However, a longitude ` of ∂N(k) is not so clear how to define since it canwrap around k in complicated ways. The ways in which ` can wrap around k are parameterizedby linking numbers, so we define the canonical longitude to be the curve ` in ∂N(k) such thatlk(k, `) = 0. This curve is unique up to isotopy, and will be useful in our discussion on knotsurgeries. Given a diagram D of a knot k one can draw the canonical longitude as a parallel of kthat wraps −w(D) full times around k, where w(D) is the writhe of the diagram. Take note thatwe are using the linking number to define the canonical longitude even though our knot need notbe oriented. However, we can given k any orientation and point ` in the same direction, and thenthe linking number will not depend on the orientation we gave k.
In figure 2.4 we have three knots drawn (the bolded knots) with longitudes (not bolded). Thefirst two longitudes are canonical, as one can easily calculate their linking numbers to be 0. Howeverthe third longitude, which seems like a more obvious choice for a longitude than the second, is notcanonical since its linking number is -3.
The fundamental group of the knot complement π1(S3\k) is called the knot group, and clearlyis an invariant of the knot. There is a simple algorithm for computing a presentation of π1(S3\k)given a diagram of D. For a diagram D of k, let n+1 be the number of crossings. Let α0, . . . , αn bethe arcs in D that start at a crossing, travel along the under-strand, and end at the next crossingthat the strand goes under such that αi starts at where αi−1 ends (we always take the subscripts ofthe α’s to be mod n). Also orient these arcs such that αi points towards the starting point of αi+1.For convenience, suppose that k does not pass through (0, 0, 1) (the point at infinity in R3), and letus use this as the base point in S3\k. In terms of the knot diagram, we can think of the base pointas sitting right where we (the viewers) are, and so loops based at ∞ leave from us, travel throughthe knot diagram, and then return to us. Hence, a loop in the knot diagram can be representedby just a curve segment (not a loop), and we just assume the ends are connected to the point atinfinity in the obvious way.
Generators of π1(S3\k) are just short arc segments x0, . . . , xn in the diagram such that xi passesunder αi, and oriented so that it crosses under αi from the right to the left. Each crossing of theknot diagram gives a relation ri on the generators of the fundamental group. Suppose the crossing iswhere the arcs αi, αj and αj+1 come together for some indices i and j (hence αi is the over-strand).If the sign of the crossing is +1, then we add the relation xixj = xj+1xi, and if the sign is −1, thenwe add the relation xjxi = xixj+1. Note that we are computing the sign of these crossings with theorientation on k induced by the orientations on the α arcs, which were chosen for convenience. Ifwe changed those orientations we would get an equivalent presentation of the fundamental group.Let ri denote the relation obtained at the crossing where αi and αi+1 meet.
11

A
B
C
a
b
c
Figure 2.5: Computing the knot group of the trefoil
Proposition 2.3. The fundamental group of S3\k is isomorphic to 〈x0, . . . , xn : r0, . . . , rn〉.Proof. First we isotope k so that it lies in z = 0 ⊂ R3, except at a crossing where the understanddips to the z = −ε plane for a short segment, which we call βi for the crossing corresponding towhere αi and αi+1 meet. We will decompose S3\k into a bunch of pieces and apply van Kampen’stheorem. Let A = z ≥ −ε \k, and let Bi (i = 0, . . . , n) be a small open rectangular box aroundthe segment βi, but with βi remove and with a thin tube connected the box to ∞. Finally, let Cbe the complement of the closure of A ∪B0 ∪ · · · ∪Bn.
First we claim that π1(A) is a free group generated by x0, . . . , xn. To see this let αi be the arcαi whose endpoints dive straight down to connect to the plane z = −ε, and let k be the union ofthese arcs. Then π1(S3\k) is isomorphic to π1(S3\k), so we compute the later group. If we takea curtain below the arc αi to the plane z = −ε and then thicken it we get a ball Bi. Removingthe Bi’s from z ≥ −ε yields a simply connected space, so we determine what happens to thefundamental group when we add the pieces Bi\αi back. The piece Bi\αi is just a punctured disc,so its fundamental group is generated by a loop going around this hole once. Also the piece Bi\αiintersects the space where we removed all the Bj ’s from z ≥ −ε is just a disc, hence we addedone generator by adding the piece Bi\αi. Continuing this we get the claim.
UNFINISHED
This presentation of the knot group is called the Wirtinger presentation.
Example 2.1. Consider the diagram of the trefoil knot k shown in figure 2.5 (we label our arcsby A,B,C and generators of π1 by a, b, c). The Wirtinger representation of the knot group is
π1(S3\k) = 〈a, b, c : ba = ac, ac = cb, cb = ba〉
We can eliminate a generator from this presentation by seeing that c = bab−1, hence anotherpresentation of the fundamental group is given by
π1(S3\k) = 〈a, b : bab = aba〉
If we set x = aba and y = ba, then we see that x2 = abaaba = bababa = y3, hence yet anotherpresentation is given by
π1(S3\k) =⟨x, y : x2 = y3
⟩
12

2.2 The Alexander Polynomial
We will now construct some classical invariants of knots and links in S3. With some work theseinvariants can be extended to links in integral homology spheres, as we will see later. Thesecombinatorial invariants have very interesting relationships with “high-powered” invariants, likeSeiberg-Witten invariants and Heegaard Floer homology.
Fix a diagram D of a knot L in S3 with n components, and give the link any orientation.Suppose this diagram has k double points and the oriented resolution of this diagram has c connectedcomponents. Let us compute the Euler characteristic and genus of the Seifert surface F constructedfrom Seifert’s algorithm on D (see proposition 2.2). The Euler characteristic of c disjoint discsis c, and attaching a band to these discs decreases the Euler characteristic by one. Thereforeχ(F ) = c − k. On the other hand, an orientable surface of genus g with n boundary componentshas Euler characteristic 2− 2g−n. Setting these two Euler characteristics equal to each other andsolving for g shows that the genus of F is
g = 1 +k − c− n
2(2.1)
One can compute that the first homology of a surface of genus g with n ≥ 1 boundary componentsis the free abelian group of rank 2g + n− 1 (just look at the handlebody decomposition of such asurface), therefore, by (2.1), H1(F ) is free abelian with rank 1 + k − c.
Now, for a general Seifert surface F of a link L in S3, let α = (x1, . . . , x`) be an orderedcollection of non-intersecting, oriented, closed curves in F that form an ordered basis for H1(F ).Choose an orientation of F by specifying a nowhere zero, normal vector field n on F . For eachcurve xi, let x+
i be the curve in S3 that is xi pushed off the surface F slightly in the direction of n.For each pair of curves xi, x+
j we can compute their linking numbers (they do not intersect), andso we define the Seifert matrix of F with orientation n to be the matrix [F ] = (lk(xi, x+
j ))`i,j=1.Of course this matrix depends on our choice of orientation of F and basis for H1(F ), so to includethis dependence in the notation we may sometimes write [F ]α,n. Suppose we have fixed our basisx1, . . . , x` with pushed off curves x+
1 , . . . , x+` relative to n. If we change the orientation of F to
−n, then we can translate F a little bit so that x+1 , . . . , x
+` lie in F , in which case the curves
x1, . . . , x` are now the pushed off curves relative to −n. So, the Seifert matrix with respect tothis orientation is (lk(x+
i , xj)). This is equal to (lk(xj , x+i )) by the symmetry of linking numbers,
which is the transpose of the Seifert matrix computed with respect to n. So, reversing orientationstransposed the Seifert matrix. If we fix the orientation, then any two bases of H1(F ) are related byan invertible matrix U (invertible over Z means detU = ±1), so if α and β are two bases relatedby U , then [F ]β = UT [F ]αU .
However, even if we consider two Seifert matrices A and B equivalent if they are related byA = UTBU , for some invertible U , we do not get a knot invariant. We could just analyze howSeifert matrices transform under the Reidemeister moves, but a nicer way is to find a set of movesthat can be performed on Seifert surfaces such that any two Seifert surfaces of a knot are relatedby these moves. One such move is called stabilization and it increases the genus of a Seifert surfaceby one. Let F be a Seifert surface of k embedded in S3 and T ′ a torus with a small disc cut out(so its boundary is S1) also embedded in S3 such that F ∩ T ′ = ∅. Taking the boundary sum ofthese two surfaces F]T ′ gives another Seifert surface of k, and is called the stabilization of F .We say two Seifert surfaces are stably isotopic if they become isotopic after a finite number ofstabilizations.
Proposition 2.4. Any two Seifert surfaces of a fixed knot are stably isotopic.
13

We have already remarked that a change of basis of H1(F ) corresponds to changing the Seifertmatrix of F by UTSU , for some integral matrix with detU = ±1. Let us see how stabilizationof a Seifert surface changes the Seifert matrix. Let F be a Seifert surface of k with generatorsx1, . . . , x2g for H1(F ). By forming F ′ = F]T ′ we are adding two generators to the first homology,one curve going around the longitude of T ′ and one curve going around the meridian, so let y andz denote these curves. Since the torus T ′ can knot and link with F in complicated ways, we havethat column and row of [F ′] corresponding to y can consist of arbitrary integers, except that eitherlk(y, z+) = ±1 and lk(z, y+) = 0, or the opposite. Therefore the Seifert matrix [F ′] is given by
∗ 0
[F ]...
...∗ 0
∗ · · · ∗ ∗ ±10 · · · 0 0 0
or
∗ 0
[F ]...
...∗ 0
∗ · · · ∗ ∗ 00 · · · 0 ±1 0
This leads us to define two operations we can perform on integral matrices. Given an integral,
n × n matrix A (not necessarily invertible), performing an S1 move is to change the matrix toUTAU for some invertible integral matrix U . Performing an S2 move is to change the matrix tothe (n+ 2)× (n+ 2) matrix given by
∗ 0
S...
...∗ 0
∗ · · · ∗ ∗ ±10 · · · 0 0 0
(2.2)
where the ∗’s can be any numbers. We say that two integral matrices are S-related one can bebrought to the other with a finite sequence of S1 and S2 moves. An immediate consequence ofproposition 2.4 is
Corollary 2.1. Any two Seifert matrices of a knot are S-equivalent.
Therefore the S-equivalence class of any Seifert matrix of a knot is an invariant of the knot.There are simpler or more computable invariants we can derive from the Seifert matrix. Given aknot k, let S be any Seifert matrix for k. The Laurent polynomial
∆k(t) = det(t1/2S − t−1/2ST
)in t1/2 is called the Alexander polynomial of k. Technically we should call this the Conwaynormalization of Alexander’s polynomial, as Alexander’s original definition used the infinite cycliccovering of the knot complement, and was defined only up to multiplication by a unit. Since thedimension of S is 2g (where g is the genus of the surface associated to S) we have ∆k(t) is actuallya Laurent polynomial in t, and a direct substitution shows ∆k(t) = ∆k(t−1). If S is of genus g,then we can easily see that ∆k(t) = t−g det(S − tST ).
Proposition 2.5. The Alexander polynomial does not depend on the Seifert matrix chosen, henceis a knot invariant.
14

Proof. If S′ is another Seifert matrix for k, then S and S′ are related by a finite sequence of S1
and S2 moves by corollary 2.1. Let ∆k(t) denote the Alexander polynomial with respect to S, and∆′k(t) the Alexander polynomial with respect to S′. If S′ = UTSU , then we see that
∆′k(t) = det(t1/2UTSU − t−1/2UTSU
)= (detU)2 det
(t1/2S − t−1/2ST
)= ∆k(t)
where the last line follows since detU = ±1. On the other hand, if S′ is the result of performingthe S2 move on S (see (2.2)), then S′T can be written as
∗ 0
ST...
...∗ 0
∗ · · · ∗ ∗ 00 · · · 0 1 0
and the matrix t1/2S′ − t−1/2S′T can be written as
∗ 0
t1/2S − t−1/2ST...
...∗ 0
∗ · · · ∗ ∗ t1/2
0 · · · 0 −t−1/2 0
When computing the determinant of this matrix we can perform a cofactor expansion along thelast column, and then another cofactor expansion along the last row of the resulting matrix, inwhich case we see that the determinant of the above is precisely
−t−1/2(−t1/2 det
(t1/2S − t−1/2ST
))= ∆k(t)
hence the Alexander polynomial is invariant under the S2 moves.
We can extend the definition of Alexander polynomial to links in the obvious way, but it willno longer be independent of the Seifert surface. The problem is that a link L with n componentshas 2n orientations. A Seifert surface F for L can induce two of these orientations on L (and theyare opposite), and conversely we say that a Seifert surface is compatible with an oriented link if theinduced orientation agrees with the link’s orientation. While it is true that any two Seifert surfacescompatible with an oriented link are stably equivalent, it is not true that any two Seifert surfacesof a link are stably equivalent. So, the Alexander polynomial is an invariant of oriented links withcompatible Seifert matrices.
As mentioned above, the Alexander polynomial is not sensitive to the orientation of a knot, i.e.∆k(t) = ∆−k(t). Unfortunately, the Alexander polynomial is also not sensitive to changing a knotto its mirror. The mirror of a knot k is the knot k obtained by reflecting k through any planein R3. This is equivalent to changing all over crossings to under crossings (and vice versa) in adiagram of k.
Proposition 2.6. For any knot k, ∆k(t) = ∆k(t).
15

Proof. If S is a Seifert matrix of k, then −S is a Seifert matrix of k. Let 2m be the order of S.Then
∆k(t) = det(−t1/2S + t−1/2ST
)= det
(t−1/2ST − t1/2S
)= det
(t−1/2S − t1/2ST
)= ∆k(t−1) = ∆k(t)
There are also scalar invariants of knots that one can derive from Seifert matrices.
Proposition 2.7. If S is the Seifert matrix of some Seifert surface of a knot k, then |det(S+ST )|is a knot invariant.
Proof. We just have to check that | det(S + ST )| does not change after applying S1 and S2 movesto S. If we change S by UTSU , then clearly
| det(UTSU + UTSTU)| = |(detU)2 det(S + ST )| = |det(S + ST )|Let S′ be the matrix resulting from applying S1 to S (see (2.2)). Then S′ + S′T is of the form
∗ 0
S + ST...
...∗ 0
∗ · · · ∗ ∗ ±10 · · · 0 ±1 0
By adding multiples of the last column to the other columns, and multiples of the last row to theother rows we can bring this matrix into the form
0 0
S + ST...
...0 0
0 · · · 0 0 ±10 · · · 0 ±1 0
(2.3)
and the determinant of this matrix is −det(S + ST ). Therefore the absolute value of this determi-nant remains invariant under S1 and S2 moves.
We call |det(S+ST )| the determinant of the knot k, and denote it by det(k). The relationshipbetween the determinant of k and the Alexander polynomial is clear.
Proposition 2.8. |∆k(−1)| = det(k)
Proof. Let S be any Seifert matrix of k and let 2m be the order of S (the order must be even fora knot). Then
|∆k(−1)| =∣∣∣det
((−1)1/2S − (−1)−1/2ST
)∣∣∣=∣∣∣det
((−1)1/2S + (−1)1/2ST
)∣∣∣=∣∣(−1)m det(S + ST )
∣∣
16

The Alexander polynomial satisfies a skein relation, which is closely related to another polyno-mial invariant that is essentially the same as the Alexander polynomial. For an oriented link L anda diagram D of L, choose any crossing in this diagram and let L+ denote the diagram resultingfrom switching this crossing to a positive crossing, L− the diagram resulting from switching to anegative crossing, and L0 the diagram resulting from resolving the crossing in the oriented way (see??).
Theorem 2.1. The Alexander polynomial of an oriented link L satisfies the skein relation
∆L+(t)−∆L−(t) = (t1/2 − t−1/2)∆L0(t)
Further, this relation, along with the normalization ∆unknot(t) = 1, uniquely determines the Alexan-der polynomial as a function from oriented links to Z[t1/2, t−1/2].
Proof. Let F0 be the Seifert surface for L0 constructed from Seifert’s algorithm (see proposition 2.2).We can construct Seifert surfaces F± for L± by gluing in a twisted band. Take a basis x1, . . . , xk−1for H1(F0), then we can get a basis for H1(F±) by adding one extra curve xk that goes through thetwisted band once. Let S0 be the Seifert matrix of F0 computed with respect to x1, . . . , xk−1.The Seifert matrices S± of F± are of the form
S+ =
b1
S0...
bk−1
a1 · · · ak−1 N
S− =
b1
S0...
bk−1
a1 · · · ak−1 N − 1
for some integers a1, . . . , ak, b1, . . . , bk, N . Writing out the entries of t1/2S± − t−1/2ST± we see thatthe last column and row of these matrices are equal, except for the bottom-right corner entrywhere one matrix has (t1/2 − t−1/2)N and the other has (t1/2 − t−1/2)(N − 1). So, if we compute∆L+(t)−∆L−(t) by performing a cofactor expansion along the last columns, then the terms from∆L+(t) will cancel those from ∆L−(t) except for the last term, which is equal to
(−1)2k(t1/2 − t−1/2)N∆L0(t)− (−1)2k(t1/2 − t−1/2)(N − 1)∆L0(t) = (t1/2 − t−1/2)∆L0(t)
Therefore ∆L(t) satisfies the skein relation.
Although the Alexander polynomial satisfies a skein relation, this relation does not quite looklike the relation for the Jones polynomial. To make things more uniform we introduce the Conwaypolynomial ∇L(z). This is a function ∇ : oriented links → Z[z] that is uniquely determined bythe normalization ∇unknot(z) = 1 and the skein relation
∇L+(z)−∇L−(z) = z∇L0(z)
The relationship between the Alexander and Conway polynomial is given by ∆L(t) = ∇L(t1/2 − t−1/2
).
2.3 Knot Signatures and 4-Ball Genus
A very important invariant of knots is the signature.
Proposition 2.9. Let ω be a unit complex number not equal to 1, and let S be a Seifert matrix ofthe knot k. Then the signature of the Hermitian matrix (1−ω)S+(1−ω)ST over C is an invariantof the knot.
17

Proof. We just have to check that the signature of (1 − ω)S + (1 − ω)ST does not change afterapplying S1 and S2 moves to S. Clearly the signature is invariant under S1 moves. Let S′ be theSeifert matrix resulting in applying an S2 move, then we have (1−ω)S+ (1−ω)ST is congruent to
0 0
(1− ω)S + (1− ω)ST...
...0 0
0 · · · 0 0 1− ω0 · · · 0 1− ω 0
The signature of this block matrix is the sum of the signatures of the blocks. Since the signatureof the bottom-right block is zero, we have that the signature of the above matrix is the signatureof (1− ω)S + (1− ω)ST , hence the signature is invariant under S2 moves.
We call the signature of (1 − ω)S + (1 − ω)ST the ω-signature of the knot, and denote it byσω(k). If ω = −1, then we just call this the signature of k, and denote it by σ(k).
For a knot k in S3, consider the 4-ball D4 bounded by S3. Let g∗(k) denote the minimal genusof a surface F that can be smooth embedded in D4 with ∂F = k ⊂ S3. This knot invariant iscalled the smooth 4-ball genus, or sometimes the smooth slice genus. A knot is said to beslice if g∗(k) = 0. The relationship between signature and slice knots is the following.
Theorem 2.2. If k is a slice knot, then σ(k) = 0.
We will outline the proof of this theorem in a series of lemmas. Suppose k is a slice knot withslicing disc D ⊂ D4. If F is a Seifert surface for k in S3, then we can glue together F ∪D to obtaina closed surface in D4.
Lemma 2.2. The surface F ∪D bounds a smoothly embedded, orientable 3-manifold M in D4 withM ∩ S3 = F .
Lemma 2.3. Let M be a compact, orientable 3-manifold such that ∂M is a surface of genus g.Then the kernel of the map i∗ : H1(∂M ; Q) → H1(M ; Q) induced by the inclusion is of dimensiong.
Proof. We can put the homology and cohomology long exact sequences of the pair (M,∂M) intothe following commutative diagram
H2(M,∂M ; Q) //
H1(∂M ; Q)i∗ //
H1(M ; Q)
H1(M ; Q) i∗ // H1(∂M ; Q) δ // H2(M,∂M ; Q)
where the vertical arrows are the Poincare and Poincare-Lefschetz duality isomorphisms. By theuniversal coefficient theorem we have that H1(∂M ; Q) is dual to H1(∂M ; Q), H1(M ; Q) is dual toH1(M ; Q), and i∗ is dual to i∗. By the rank-nullity theorem we have
2g = dim im i∗ + dim ker i∗ = dim im i∗ + dim ker δ = dim im i∗ + dim im i∗ = 2 dim im i∗
hence dim im i∗ = g, and so dim ker i∗ = g.
Lemma 2.4. There is a basis xi over Z for H1(∂M) such that i∗(xj) = 0 for 1 ≤ j ≤ g.
18

Proof. We think of H1(∂M) = Z2g as sitting inside H1(∂M ; Q) = Q2g. Let U be the g dimensionalsubspace of Q2g which is the kernel of the map Q2g → H1(M ; Q) induced by the inclusion. We cantake a basis x1, . . . , xg for this vector space such that xi ∈ Z2g, and so let U be the Z-span ofthese vectors.
As a Z-module we can write Z2g/U as A/U ⊕B/U , where A and B are submodules of Z2g suchthat A/U is free and B/U is torsion. The fact that this latter module is torsion means that forb ∈ B there is an integer n such that nb ∈ U , hence nb ∈ U , or simply b ∈ U . Thus a Z-basis for Balso serves as a Q-basis for U . So, the Z-basis we take for H1(∂M) is any extension of a basis forB to a full basis for H1(∂M).
Lemma 2.5. Let F be a genus g Seifert surface for a slice knot k. Then there is a basis for H1(F )such that the associated Seifert matrix is of the form
S =(
0 PQ R
)for some g × g matrices P,Q,R.
Proof. Let D be a slicing disc for k in D4 so that there is a 3-manifold M with ∂M = F ∪D. Letxi be a Z-basis for H1(∂M) as in the previous lemma so that xi = 0 in H1(M ; Q) for 1 ≤ i ≤ g.We can assume that the homology classes xi are represented by oriented, closed curves in ∂M , andwe will also write xi to denote these curves. For each 1 ≤ i ≤ g we can find a non-zero integer nisuch that nixi = 0 in H1(M). The class nixi can be represented by a closed curve in ∂M , whichwe also denote by nixi, and it bounds a 2-chain in M . This means we can find maps fi : Fi → D4,where Fi is a surface with boundary, such that fi(∂Fi) = nixi. If we push the curve nixi off of ∂Min the normal direction, then we can also pushing the mapping fi in this direction. Therefore, for1 ≤ i, j,≤ g the curves nifi and (njfj)+ bound disjoint surfaces in D4, and hence
0 = lk(nifi, (njfj)+) = ninj lk(fi, f+j )
Therefore the upper-left g × g block of the Seifert matrix of F with respect to the basis xi iszero.
Lemma 2.6. If Q is a non-degenerate quadratic form on an even dimensional space that vanisheson a subspace of half dimension, then σ(Q) = 0.
Proof. Suppose the spaceV that Q is defined on is of dimension 2g, and let U be a subspace ofdimension g such that Q(u) = 0 for all u ∈ U . If V ± denote the maximal positive/negative-definitesubspaces of V with respect to Q, then V = V + ⊕ V − since Q is non-degenerate. However, wealso have U ∩ V + = 0 and U ∩ V − = 0, hence dimV + ≤ g and dimV − ≤ g. Since we needdimV + + dimV − = 2g we are forced to have g = dimV + = dimV −, which implies σ(Q) = 0.
Proof of Theorem 2.2. Clearly the combination of the previous lemmas proves the theorem.
We say that two knots k1, k2 in S3 are concordant if there is a smooth embedding of a cylinderS1× I in S3× I such that S1×i maps to ki×i (i = 0, 1). Concordance defines an equivalencerelation on the set of knots in S3. If a knot k is concordant to the unknot, then we can cap off theunknot with a disc and obtain a smoothly embedded disc in D4 that is bounded by k, hence k isslice. Therefore a knot is concordant to the unknot if and only if it is slice.
Let C1 denote the concordance classes of knots in S3. If k1, k′1 and k2, k
′2 are concordant pairs
of knots, then k1#k2 and k′1#k2 are concordant. The cobordism can be constructed by splicing
19

together the cylinders connected k1 to k′1 and k2 to k′2. Next we claim that for any knot k, theknot k#k is slice. Define the following subsets of R4:
R3 =
(x, y, z, 0) ∈ R4
R3− =
(x, y, z, 0) ∈ R4 : z ≤ 0
R3
+ =
(x, y, z, 0) ∈ R4 : z ≥ 0
R2 =
(x, y, 0, 0) ∈ R4
Arrange the knot k#k in R3 so that its intersection with the plane R2 in R4 consists of two pointson the band used in the connect sum. Let k+ denote the intersection of k#k with R3
+, which is justan arc, so that if k− is the reflection of k+ through R2, then k+ ∪ k− is isotopic to k#k. Considerthe set of points
D =
(x, y, z cos θ, z sin θ) ∈ R4 : (x, y, z, 0) ∈ k+, 0 ≤ θ ≤ π
That is, we spin all the points on k+ about the plane R2 in R4 through all angles from 0 to π.Clearly D is just a disc (being a half spin of an arc) with boundary k#k, and this provides us witha slicing disc for k#k.
We can now conclude that C1 forms a group under connect sum with [unknot] serving as theidentity and the mirror of a knot serving as its inverse. Further, if k1 and k2 are concordant, then0 = σ(k1#k2) = σ(k1)−σ(k2), hence σ descends to a well-defined group homomorphism σ : C1 → Z.
2.4 Cyclic and Branched Covers
Now let us discuss Alexander’s original definition of his polynomial using the infinite cyclic cover ofthe complement of a link. To construct this covering space we fix an oriented link L, set X = S3\L,and fix a Seifert surface F (compatible with the orientation of L). Let Y be the space obtainedfrom cutting X along F so that ∂Y consists of two disjoint copies of F , denoted by F+ and F−;that is, Y is homeomorphic to the complement of an open tubular neighborhood of F in S3. Thereis a natural identification φ : F− → F+. Take the countable collection Y × i (i ∈ Z) of copies ofY , and let hi : Y → Yi be the obvious homeomorphism. Form the space X∞ by gluing Yi to Yi+1
via the homeomorphism hi+1 φh−1i ; that is, we glue Yi to Yi+1 by gluing F−×i to F+×i+ 1
via the map hi+1 φ h−1i . The obvious projection π : X∞ → X, where π|Yi : Yi → X is given by
π(x, i) = x, is an infinite cyclic covering space of X.Let t denote the covering transformation of X∞ whose restriction t|Yi : Yi → X∞ is given by
t(x, i) = (x, i + 1). This map induces an isomorphism (which we also denote by t) t : H1(X∞) →H1(X∞), turning H1(X∞) into a Z[t, t−1]-module, called the Alexander module of L. Of course,we need to show that this module is independent of the various choices in its construction
Proposition 2.10. If X∞ and X ′∞ are the infinite cyclic coverings of the link complement Xof a link L constructed from two different Seifert surfaces, then X∞ and X ′∞ are isomorphic hascovering spaces, and H1(X∞) and H1(X ′∞) are isomorphic as Z[t, t−1] modules.
Proof. Recall that covering spaces are determined up to equivalence by the image of the fundamentalgroup of the total space under the covering projection. That subgroup of the fundamental groupof the base space consists of those loops in the base that lift to loops in the total space. So, weshow that the notion of lifting loops to loops does not depend on the Seifert surface F used in theconstruction of X∞.
20

Let α : [0, 1]→ X be any path in X and consider a lift α : [0, 1]→ X∞. This path is a loop inX∞ if and only if α(0) and α(1) are both in X∞, which means the path intersects the chambersF± × i with algebraic multiplicity zero. Down in X this means that that α has zero algebraicintersection number with F , which we know is equivalent to α and L having zero linking number(which is the sum of the linking numbers with each component of L). This statement is of courseindependent of F , hence our notion of path lifting is independent of F , and so these covering spacesare equivalent.
Next we have to check that any two coverings are equivalent via a t-equivariant homeomorphismin order to ensure that the first homology Z[t, t−1]-modules are isomorphic. Suppose p′ : X ′∞ → Xis another covering space constructed with a different Seifert surface F ′. Then there is a homeomor-phism h : X∞ → X ′∞ such that p′ h = p. Let α be a path in X∞ from a point a to the translatet · a. In the base, the path p α is a loop with linking number 1 with L. Then p′ h α = p α,so h α is a path in X ′∞ from a point a′ to its translate t · a′, hence t · h(a) = h(t · a) and so h ist-equivariant.
Since the covering space X∞ → X is well-defined given a link L we have that the Z[t, t−1]-module H1(X∞) is an invariant of the link, called the Alexander module. Let us connect thisinvariant with the Alexander polynomial defined earlier. Given an R-module M , a presentation ofM is an exact sequence
Fα−→ E
φ−→M → 0
where F and E are free R-modules. If we fix bases for F and E then we get a matrix representationof α, called the presentation matrix of M . The r-th elementary ideal of M is the ideal of R generatedby all (m − r + 1) × (m − r + 1) minors of a presentation matrix of M . In particular, the firstelementary ideal of M is simply the determinant of any presentation matrix of M . The relationshipbetween the Alexander polynomial and Alexander module can be stated as the following.
Theorem 2.3. If S is a Seifert matrix for a knot k in S3, then tS − ST is a presentation matrixfor H1(X∞) as a Z[t, t−1]-module.
Proof. In the notation we used when constructing X∞, let us write X∞ = U ∪V , where U = ∪iY2i
and V = ∪iY2i+1. We have H0(U ∩ V ) = ⊕iH0(Fi), and the action of t on this group shifts thesummands of Z by one, so we can identify H0(U ∩ V ) with Z[t, t−1] ⊗H0(F ) generated by 1 ⊗ 1.Similarly, H0(U)⊕H0(V ) = ⊕iH0(Yi) and so we can identify this with Z[t, t−1]⊗H0(Y ) generatedby 1 ⊗ 1. With these identifications we see that the map H0(U ∩ V ) → H0(U) ⊕ H0(V ) in theMayer-Vietoris sequence is given by 1⊗ 1 7→ −1⊗ 1 + t⊗ 1, and so is injective. Therefore the mapH1(U)⊕H1(V )→ H(X∞) is the Mayer-Vietoris sequence is surjective.
Let is now fix a basis xi for H1(F ) and a dual basis yi with respect to the bilinear form β :H1(S3\F )×H1(F )→ Z. Let S = (sij) be the Seifert matrix of F with respect to this basis. Similarto the above arguments we have an identification of H1(U ∩ V ) with Z[t, t−1] ⊗H1(F ), the latterbeing generated by 1⊗ xi, and an identification of H1(U) ⊕H1(V ) with Z[t, t−1] ⊗H1(Y ), thelatter being generated by 1⊗ yi. With these identifications, the map H1(U∩V )→ H1(U)⊕H1(V )in the Mayer-Vietoris sequence is given by 1 ⊗ xi = −1 ⊗ x−i + t ⊗ x+
i . However, as elements inH1(S3\F ), the cycles x+
i and x−i can be written as
x+i =
∑j
sjiyj
x−i =∑j
sijyj
21

Therefore−1⊗ x−i + t⊗ x+
i =∑j
(−1⊗ sijyj + t⊗ sjiyj)
With, with respect to our bases we have that the matrix of the map in the Mayer-Vietoris sequenceis given by tS − ST .
We can change the construction of the infinite cyclic cover of the link exterior slightly to obtaina finite cyclic cover. For an integer k > 0, take k copies of Y (the link exterior cut open along aSeifert surface) by setting Yi = Y × i (i = 0, 1, . . . , k− 1). For the space Xk by gluing Yi to Yi+1
via the homeomorphism hi+1 φ h−1i (where all induces are taken modulo k). Then the obvious
projection πk : Xk → X is a k-fold cyclic covering of the link exterior. Note that we have an infinitecyclic covering X∞ → Xk that maps the points in Yi ⊂ X∞ identically onto Yi mod k. In fact, thespace Xk is simply the quotient X∞/
⟨tk⟩.
This collection of covering spaces depends only on the link L and not on the various choicesused to define it.
This collection of covering spaces can now be extending to cyclic branched covers Xk → S3
of the 3-sphere, branched over the link L. A loop in X lifts to a loop in Xk if and only if it haslinking number 0 (modulo k) with L. For a component Li from the link L, let νLi be a tubularneighborhood. We can identify ∂νLi with S1 × S1 by choosing a meridian µi and longitude `i of∂νLi such that `i links zero times with Li. Then µki (the k-th power of µi) and `i lift to a loops inXk which identify a torus in Xk. The restriction of the covering map to this torus gives a k-foldcovering of one torus over another which is equivalent to (z, w) 7→ (z, wk). We can extend this toa branched covering S1 ×D2 → S1 ×D2 given by (z, w) = (z, wk), where this is branched over thecore circle S1 × 0. So, if we glue solid tori into the boundary components of Xk we obtain a spaceXk with a natural projection Xk → S3 that is a k-fold covering branched over L.
2.5 Applications
Seifert matrices are closely related to the intersection form on a compact, orientable surface. In-tersection forms are defined on any even dimensional manifold, and we give a fuller treatment for4-manifolds in section 6.1, so we will just briefly state the facts. For a closed, oriented surface M ,Poincare duality gives us a non-degenerate, antisymmetric, bilinear form QM : H1(M)⊗H1(M)→Z defined by QM (α, β) = (α ` β, [M ]). It follows that the matrix representation of QM in anybasis of H1(M) has determinant ±1. However, we have the following lemma concerning these typesof matrices.
Lemma 2.7. If A is the matrix representation of a non-degenerate, antisymmetric bilinear form,then there is a matrix U such that A = UTJU , where J is a block diagonal matrix of copies of(
0 1−1 0
)Therefore the matrix of QM with respect to any basis must have determinant +1. There is
a more geometric definition of the intersection form on M . A homology class a ∈ H1(M) canbe represented by a closed, smoothly embedded 1-dimensional submanifold of M , call it Ca. Ifa, b ∈ H1(M) with representative submanifolds Ca and Cb, then perturb them a little so that theyintersect transversely, and let a · b be the signed sum of their points of intersection, called theintersection product. Then one can show that QM (α, β) = PD(α) · PD(β).
22

If M has one boundary component (i.e. M is a Seifert surface of some knot), then QM is still anon-degenerate, antisymmetric, bilinear form, and it can still be expressed in terms of intersectionsof homology classes. If M has more than one boundary component, then QM is an antisymmetric,bilinear form, and can be defined in terms of intersections, but it is now necessarily degenerate,and so any matrix representation has zero determinant.
Proposition 2.11. Let F be a Seifert surface of a knot k with Seifert matrix S in some basis ofH1(F ). Then the intersection form of F in this basis is precisely S − ST .
Proof. At a positive crossing of xi and xj we see that x+j is above xi. So we have lk(xi, x+
j )contributes +1 at this crossing and lk(xj , x+
i ) does not contribute anything (since we only countcrossings where the first strand passes under). On the other hand, at a negative crossing of xiand xj we have that x+
j passes below xi. Hence lk(xi, x+j ) contributes nothing at this crossing and
lk(xj , x+i ) contributes +1. Therefore xi · xj = lk(xi, x+
j )− lk(xj , x+i ).
Corollary 2.2. If k is a knot, then ∆k(1) = 1, and if L is a link, then ∆L(1) = 0.
Proof. Let Fk and FL be Seifert surfaces for k and L. By proposition 2.11 we have ∆k(1) =detQM = 1 and ∆L(1) = detQL = 0.
The Alexander polynomial of the connected sum of two knots has a very simple expression.
Proposition 2.12. If k1 and k2 are knots, then ∆k1#k2(t) = ∆k1(t) ·∆k2(t).
Proof. We can assume that k1 and k2 are situated in S3 far apart, and that F1 and F2 are Seifertsurfaces for k1 and k2 respectively that do not intersect. Then by taking the boundary sum F1]F2
we get a Seifert surface for k1#k2. If S1 and S2 are the Seifert matrices for F1 and F2 respectively,then the Seifert matrix of F1]F2 is (
S1 00 S2
)We clearly now have
∆k1#k2(t) = det(t1/2S1 − t−1/2ST1 ) · det(t1/2S2 − t−1/2ST2 ) = ∆k1(t) ·∆k2(t)
The Alexander polynomial has a clear relationship with the genus of a knot.
Proposition 2.13. For a knot k we have deg ∆k(t) ≤ g(k).
Proof. If S is a Seifert matrix of order 2m for k, then deg ∆k(t) ≤ m, hence deg ∆k(t) ≤ g(k).
Proposition 2.14. If detS 6= 0 for some Seifert matrix S of k, then deg ∆k(t) = g(k).
Proof. If S is a Seifert matrix associated to a Seifert surface of genus g, then we can write ∆k(t) =t−g det(S− tST ). The constant term of the polynomial det(S− tST ) is just detS, which is non-zeroby assumption. Therefore the coefficient of t−g in ∆k(t) is non-zero, and so deg ∆k(t) = g.
A link L is said to be a split link if one can find an embedded 2-sphere in S3 that separatessome components of L from the other components of L.
Proposition 2.15. If L is an oriented, split link L, then ∆L(t) = 0.
23

Proof. Suppose L = k1 ∪ k2 such that k1 can be separated from k2 by an embedded 2-sphere. LetF1 and F2 be Seifert surfaces for k1 and k2 respectively, and let g1 and g2 be the genera of F1 andF2 respectively. We can constructed a Seifert surface for L by taking the connected sum F1#F2;that is, cut small, open discs out of F1 and F2 and glue in a tube S1 × I. Recall that a surface ofgenus g with n boundary components has first homology of rank 2g + n− 1, hence H1(F1) ∼= Z2g1
and H2(F2) ∼= Z2g2 . However, H1(F1#F2) ∼= Z2g1+2g2+1, so this homology group has one extragenerator in addition to the generators coming from F1 and F2. This generator can be representedby the meridian µ of the tube S1× I. This generator does not link with the push offs of any of thegenerators from F1 and F2, hence there is an entire row and column of zeros in the Seifert matrixof F1#F2, and so ∆L(t) = 0.
2.6 Knots in other 3-Manifolds
Much of what we have said so far can be generalized to 3-manifolds other than S3. For example,a knot k in a 3-manifold M is just a smoothly embedded copy of S1 into M . Unfortunately,there is no analogous concept of diagram of knots in a general manifold, but any term we definedbefore without the use of a diagram can be defined for knots in a manifold. We will work towardsextending other concepts and results to knots in a manifold, but almost always we are going to needto require that the manifold is an integral homology sphere so that we have the following property.
Proposition 2.16. If M is a homology sphere and k an embedded knot, then M\k is a homologycircle, that is H∗(M\k) = H∗(S1).
Proof. The proof is the same as in proposition 2.1.
Our first definition of linking number of two oriented, disjoint knots needed a knot diagram,so we cannot use this definition in a manifold. However, if M is an integral homology sphere, andk1 and k2 knots in M , proposition 2.16 says that H1(M\N(k1)) = Z is generated by [µ], where µis any meridian of N(k) (which is just the boundary of any normal cross-section). So, as we didbefore, we define the linking number lk(k1, k2) to be the integer such that [k2] = lk(k1, k2) · [µ]. Wecan also define the canonical longitude ` of a knot k in M to be the closed curve in ∂(M\N(k))such that lk(k, `) = 0.
Let k be a knot in M with canonical longitude `, and orient k and ` such that the basis (k, `, n)is the same as the orientation on M (M is orientable since it is an integral homology sphere),where n is the inward point normal vector. The choice of meridian µ and longitude ` gives anidentification ϕ : ∂(M\N(k))→ S1 × S1. Let p0 : ∂(M\N(k))→ S1 be p0 = πS1 ϕ, where πS1 isprojection onto the second factor.
Proposition 2.17. Let K = M\N(k) be the knot complement. The projection p0 : ∂K → S1
extends to a map p : K → S1.
Proof. Let i : ∂K → K be the inclusion. We claim that p0 extends to p if and only if the homotopyclass [p0] is in the image of the induced map i∗ : [K,S1] → [∂K, S1]. Clearly if such an extensionexists then [p0] = i∗[p]. Conversely, suppose there is some homotopy class of maps [p] such that[p0] = i∗[p]. This means that p0 and p i are homotopic on ∂K, but we need them to be equal.Let H be a homotopy between p i and p0 and let U ⊆ M be a collar of ∂K in K, i.e. U isdiffeomorphic to ∂K × [0, 1] such that ∂K × 0 is mapped identically to ∂K ⊂ U . If we definep′ : K → S1 to be p outside U and H(x, t) on the part of U corresponding to (x, t) ∈ ∂K × I, thenwe see that p′ is an extension of p0.
24

In appendix C we saw that we have a natural isomorphism of groups
[∂K, S1] ∼= H1(∂K)
since S1 is a K(Z, 1) space. The inclusion i induces a map on cohomology, and by naturality of theabove isomorphism, and naturality of the Poincare isomorphisms we get the following commutativediagram from the long exact sequence of the pair (K, ∂K)
H1(∂K)i∗ // H1(K)
H1(∂K)
PD
OO
δ// H2(K, ∂K)
PD
OO
where δ is the connecting homomorphism. We have that [`] is the Poincare dual of [p0], so bycommutativity of the above square we have δ[p0] = PD−1i∗[`] = 0, since [`] is the canonicallongitude, hence [p0] ∈ ker δ. But, by exactness we have [p0] ∈ ker δ = im i∗, hence p0 extends to amap p by our previous claim.
This proposition can easily be extended to links. One might wonder if the map p0 is a fibrationof the knot complement over S1. This is not always true, so it leads to the notion of a “fibered”knot, and will be discussed later. We can use proposition 2.17 to show that Seifert surfaces existfor links in integral homology spheres.
Proposition 2.18. Given a link L in an integral homology sphere M there is a smoothly embedded,compact, orientable and connected surface F such that ∂F = L.
Proof. Let p : K → ∂D2 be the map constructed in proposition 2.17, where K is the link comple-ment in M . We can slightly homotopy p such that it is transverse to a point ∗ ∈ ∂D2, in whichcase F ′ = p−1(∗) is a smoothly embedded submanifold of K of codimension 1 (by proposition 1.1)with boundary contained in ∂K, hence F is a surface. We can connect the boundary of F ′ to Lvia annuli contained in the tubular neighborhoods of the link components to get a Seifert surfaceF .
25

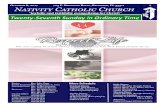
Handle AnatomyAttaching map ϕ : ∂Dk ×Dn → ∂X
Attaching region ∂Dk ×Dn−k
Attaching sphere ∂Dk × 0Belt sphere 0× ∂Dn−k
Core Dk × 0Cocore 0×Dn−k
Belt Sphere
Core
Cocore
Attaching Sphere
Attaching Region
Dn−k
Dk
Figure 3.1: Anatomy of an n-dimensional k-handle
3 Handlebodies
3.1 Handlebody Decompositions
Let X be a smooth n-dimensional manifold with boundary. The process of attaching an n-dimensional k-handle to X is to form the quotient space X ∪ϕ h, where h is a copy of Dk ×Dn−k,and where ϕ : ∂Dk ×Dn−k → ∂X is a smooth embedding. Notice that ∂Dk ×Dn−k is only part ofthe boundary of Dk ×Dn−k. Also, the manifold X ∪ϕ h is not smooth, as it has corners. However,there is a canonical way to smooth the corners, so we may assume the quotient space is a smoothn-manifold with boundary. If two attaching maps ϕ,ϕ′ : ∂Dk × Dn−k → ∂X are isotopic, thenthe resulting manifolds X ∪ϕ h and X ∪ϕ′ h are diffeomorphic. Also note that there is an obviousdeformation retract of Dk×Dn−k onto Dk×0, hence X∪ϕh deformation retracts onto X∪ϕDk×0(where ϕ is suitably restricted in the second space), hence attaching a k-handle is the same asattaching a k-cell.
The anatomy of a handle is simple and the pieces have intuitive names. The map ϕ is calledthe attaching map, while ∂Dk×Dn−k is called the attaching region (and sometimes the imageof this set under ϕ). The subset Dk × 0 is called the core of the handle, and 0×Dn−k the cocore.The region ∂Dk × 0 the attaching sphere, and 0× ∂Dn−k the belt sphere. Finally, the numberk is called the index of the handle. See figure 3.1.
Unfortunately this picture is a little misleading since attaching a k-handle does not alwayslook like attaching a ball along two disconnected pieces of its boundary. For example, attaching
26

a 4-dimensional 2-handle means attaching a copy of D2 ×D2 along the solid torus S1 ×D2. Theboundary of D2 ×D2 is a union of solid tori S1 ×D2 ∪D2 × S1 that intersect at their boundariesS1 × S1, and this decomposition of S3 into two solid tori is clearly the genus 1 Heegaard splitting.
An embedding ϕ : ∂Dk × Dn−k → ∂X is the same as embedding the trivial normal bundleof the attaching sphere ϕ(∂Dk × 0) into ∂X. Therefore ϕ determines, and is determined by, anembedding ϕ0 : ∂Dk × 0→ ∂X of the attaching sphere and an equivalence f of the normal bundleνϕ0(∂Dk) with the trivial vector bundle ∂Dk × Rn−k; this is intuitively plausible, but is also thecontent of the Tubular Neighborhood Theorem. The embedding ϕ0 is just a knot in ∂X, and thevector bundle equivalence f is called a (normal) framing of ∂Dk = Sk−1. If the data (ϕ0, f) and(ϕ′0, f
′) are smoothly isotopic, then the resulting manifolds X ∪ϕ h and X ∪ϕ′ h are isotopic.Fix a framing f0 for Sk−1, i.e. a vector bundle equivalence
Sk−1 × Rn−k f0 //
νϕ0(Sk−1)
Sk−1ϕ0
// ϕ0(Sk−1)
If f is another framing of Sk−1, then f−1 f0 : Sk−1 × Rk → Sk−1 × Rn−k must map (p, v) to(p, g(p) · v), where g : Sk−1 → GL(n − k) is smooth. Without loss of generality we can assumethat g(p) = I for a fixed base point p ∈ Sk−1. Therefore each framing determines an element ofthe group πk−1(GL(n − k)), which is isomorphic to πk−1(O(n − k)) by the deformation retract ofGL(n−k) onto O(n−k), and it is even true that the set of framings are in one-to-one correspondencewith elements of πk−1(O(n − k)). However, the set of framings is not canonically isomorphic toπk−1(O(n− k)), since the identification depends on f0, but it is a principal homogeneous space forπk−1(O(n− k)). Sometimes there is a canonical choice of f0, and this will be useful later.
We can get a lot of information about attaching very low index handles and very high indexhandles. The attaching sphere for a 0-handle D0 ×Dn is empty, so attaching a 0-handle to X isthe same as simply taking the disjoint union of X with Dn. The attaching sphere of a 1-handle isa disjoint pair of points, and so if ∂X is connected and non-empty there is a unique isotopy classof attaching maps (well, except in the case n = 2 and ∂X non-compact, in which case we can alsointerchange the two components of the attaching sphere). Further, since π0(O(n − 1)) = Z/2 forn ≥ 2 there are exactly two framings on S0, hence there are exactly two manifolds one can obtainby attaching a 1-handle to a 0-handle (these are the n-dimensional analogs of annulus and Mobiusband).
Similarly, for (n−1)-handles, with n 6= 2, there is a unique framing of Sn−2 since πn−2(O(1)) = 0.In the case n = 2 we see that (n − 1)-handles are just 1-handles, which were discussed above.Attaching an n-handle is the same as gluing a copy of Dn to ∂X along ∂Dn = Sn−1. Since ∂Xis (n − 1)-dimensional we see that we can only attach Dn to boundary components of X that arediffeomorphic to Sn−1. However, due to issues of exotic n-spheres and exotic diffeomorphisms ofn-spheres we can only say that attaching an n-handle is unique in dimensions ≤ 6.
The other combinations of k and n, where k is neither small nor close to n, are harder tounderstand. If n − k > 2, then there is only one isotopy class of embeddings Sk−1 into (n −1)-dimensional manifolds, hence all embeddings can be “unknotted.” So, the only thing thatcontrols what we get from attaching a k-handle to a 0-handle is the framing of an unknotted spherein Sn−1, which are of course parameterized by πk−1(O(n − k)). Suppose we are attaching a k-handle h2 = Dk × Dn−k to a 0-handle h1 = Dn such that the attaching sphere is the standardlyembedded, unknotted sphere Sk−1 ⊂ Sn−1. Without loss of generality we can assume that we have
27

an identification h1 = Dk×Dn−k and that the attaching map of h1 is of the form ϕ : ∂Dk×Dn−k →∂Dk×Dn−k ⊂ Dn such that π∂Dk ϕ is the identity, and the restriction of ϕ to any slice ∗×Dn−k
is an orthogonal linear map. Let X be the manifold h1∪ϕh2. We claim that there is a canonical mapπ : X → Sk making X into a Dn−k-bundle. Decompose Sk as a union of two discs, the upper andlower hemispheres. Then π projects the handle h1 onto its its first factor, which is then identifiedwith the upper hemisphere, and π projects h2 onto its first factor, which is then identified with thelower hemisphere. It is clear that this makes X into a Dn−k-bundle, and in fact all Dn−k-bundlesare of this form. Further, consider the framing f0 corresponding to id∂Dk×Dn−k . This clearly givesthe trivial bundle X = Sk ×Dn−k, and so this is a canonical element to associate to the identityin O(n− k).
If we apply the above discussion to the case k = 2, then we have that Dn−2-bundles over S2
are classified by Z if n = 4 and by Z/2 if n > 4. In this case we can get a canonical identificationof these bundles with Z (n = 4) and Z/2 (n > 4) by associating the trivial bundle with 0. Forn = 4, the integer associated to a D2 bundle over S2 is called the Euler number of the bundle. Ifn > 4, then we denote the non-trivial Dn−2 bundle over S2 by Dn−2×S2, and we also define theassociated Sn−3 bundle over S2 by Sn−3×S2 = ∂(Dn−2×S2).
Let X be a compact n-manifold with boundary written as ∂+X t ∂−X. If X is oriented give∂+X the induced orientation and ∂−X the opposite of the induced orientation. A handlebodydecomposition of X is an identification of X with an n-manifold obtained by attaching handles to∂−X× I such that ∂−X is identified with ∂−X×0. A manifold with such a decomposition is calleda relative handlebody built on ∂−X, or if ∂−X = ∅ then X is simply called a handlebody.
The theory of handlebodies and Morse theory are closely related, so it is hard to discuss onewithout the other. Unfortunately we have now come to a point where we need to assume the readerhas some knowledge of Morse theory. One can read this section concurrently with section 4.
According to the results in section 4 we have that every smooth, compact n-manifold has ahandlebody decomposition using Morse theory, and this can even be extended to non-compactmanifolds with compact boundary. Amazingly every topological n-manifold with n 6= 4 also admitsa handlebody decomposition, but this is not true in dimension n = 4. For example, there is a4-manifold with intersection form E8 which does not admit a smooth structure or a handlebodydecomposition.
Proposition 3.1. Any handlebody decomposition of a pair (X, ∂−X) can be modified (by isotopingattaching maps) so that handles are attached in order of increasing index, and handles of the sameindex can be attached in any order or simultaneously.
Proof. Suppose we attach a k-handle h1 and then an `-handle h2 to a manifold X, with ` ≤ k. Firstwe will perturb the attaching map of h2 slightly so that its attaching sphere does not intersect h1’sbelt sphere (if needed). Note that h1’s belt sphere, 0× ∂Dn−k, is of dimension n− k − 1 and h2’sattaching sphere, ∂D`× 0, is of dimension `− 1. The codimension of the intersection of genericallypositioned submanifolds is the sum of the submanifolds’ codimension, so the codimension of h1’sbelt sphere intersected with h2’s attaching sphere, in ∂X, is
(n− 1)− (n− k − 1) + (n− 1)− (`− 1) = n− 1− n+ k + 1 + n− 1− `+ 1 = n+ k − ` ≥ n
Hence we can perturb the attaching sphere of h2 slightly so that the spheres become entirelydisjoint. Now take a smooth vector field on X ∪ h1 emanating from the cocore of h1 radially, andflow the attaching sphere of h2 along this vector field. This will push the attaching sphere of h2 to∂X, so we can first attach h2 and then h1.
28

We will always assume that our handlebodies are ordered so that handles are attached withincreasing index, and we will write Xk to denote ∂−X × I union all the handles of index ≤ k.
A handlebody decomposition of a pair (X, ∂−X) naturally leads to a dual handlebody decom-position of (X, ∂+X), where k-handles in the first decomposition become (n − k)-handles in thesecond decomposition. When we attach a k-handle h to X, the points in ∂Dk × Dn−k becomeinterior points of X ∪ h and the points in Dk × ∂Dn−k become boundary points in X ∪ h. Otherhandles will be attached to the part Dk × ∂Dn−k of h, so we could reverse this and instead thinkof h has an (n − k)-handle being attached to those other handles. Intuitively, we are turning thehandlebody upside down. If the handlebody decomposition is given by a Morse function f , thenthe dual handlebody is just the handlebody given by the Morse function 1− f .
Example 3.1. We will show how CPn, complex projective n-space, can be decomposed into ahandlebody with one 2k-handle for each 0 ≤ k ≤ n. Recall that CPn is the quotient of Cn+1−0 byC∗ acting by scalar multiplication. The equivalence class of (z0, . . . , zn) is denoted by [z0 : · · · : zn].Complex projective space is an n-dimensional complex manifold (or 2n-dimensional real manifold)that can be covered with n+ 1 charts ϕi : Cn → CPn defined by
ϕi(z0, . . . , zn−1) = [z0 : · · · : zi−1 : 1 : zi : · · · : zn−1]
The inverses φi : Ui → Cn of these charts are given by
φi([z0, . . . , zn]) = (z0/zi, . . . , zi−1/zi, zi+1/zi, . . . , zn/zi)
where Ui consists of all points [z0, . . . , zn] such that zi 6= 0.Let D be the unit disc in C, and and let Bi = ϕi(D × · · · ×D) (an embedded complex n-ball
in CPn). Every point p ∈ CPn has a unique representative (z0, . . . , zn) such that |zi| = 1 for some0 ≤ i ≤ n and |zj | ≤ 1 for all j (just divide by the coordinate with largest norm), which we willcall the canonical representative of p. It follows that Bi covers CPn. We also see that p ∈ Bi ifand only its canonical representative has |zi| = 1, and p ∈ ∂Bi if and only if |zj | = 1 for some otherj 6= i. From this it follows that two balls Bi and Bj can intersect only at points in the boundariesof each ball: p ∈ Bi ∩ Bj if and only if its canonical representative has |zi| = |zj | = 1 and |zk| ≤ 1for all k. In particular, then ball Bk intersects the union ∪i<kBi at all points whose canonicalrepresentative has |zk| = 1, |zj | = 1 for some 0 ≤ j < k and |z`| ≤ 1 for all `. This means thatthe restriction of ϕk to ∂(D × · · · ×D)×D × · · · ×D ⊂ Dk ×Dn−k is an embedding into ∪i<kBi,therefore ∪i≤kBi can be obtained from ∪i<kBi by attaching a 2k-handle via ϕk.
By replacing R for C in the above construction we get a decomposition of RPn into a handlebodywith one k-handle for each 0 ≤ k ≤ n. We are going to explicitly compute the attaching maps forRP 1,RP 2,CP 1 and CP 2. From the description above we have that RP 1 is constructed by gluingB1 = [x, 1] : −1 ≤ x ≤ 1 to B0 = [1, x] : −1 ≤ x ≤ 1 via the map ϕ1 restricted to ∂D ⊂ R. Inthis case ϕ1 : −1,+1 → B0 and ϕ1(−1) = [−1, 1] and ϕ1(1) = [1, 1]. This is the attaching map,and it attaches one interval to another by identifying endpoints, hence RP 1 is just a circle.
The real projective plane RP 2 can be written as a union of a 0-, 1- and 2-handle. From theconstruction we described we have the following balls
B0 = [1, x, y] : −1 ≤ x, y ≤ 1B1 = [x, 1, y] : −1 ≤ x, y ≤ 1B2 = [x, y, 1] : −1 ≤ x, y ≤ 1
We attach a 1-handle to B0 via the map ϕ1|∂D×D, which maps (±1, x) to [±1, 1, x] = [1,±1,±x] ∈B1. Explicitly, this means that (1, x) is mapped to [1, 1, x] and (−1, x) maps to [1,−1,−x], so
29

Figure 3.2: Attaching the 1-handle in RP 2
Figure 3.3: Attaching the 2-handle in RP 2
this is identifying edges of two squares with a twist (see figure 3.2). We attach a 2-handle toB0 ∪ B1 via ϕ2|∂(D×D) which maps (±1, x) to [±1, x, 1] = [1,±x,±1] ∈ B0 and maps (x,±1) to[x,±1, 1] = [±x, 1,±1] ∈ B1. This glues a disc into B0 ∪ B1 as in figure 3.3, where have not yetidentified the final 2 sides of the square since that would make it difficult to draw B0 ∪B1 ∪B2.
Now consider CP 1, which is the union of a 0-handle and 2-handle. By definition we have
B0 = [1, z] : |z| ≤ 1B1 = [z, 1] : |z| ≤ 1
We attach a 2-handle to B0 via ϕ1 which maps z to [z, 1] = [1, 1/z] = [1, z] ∈ B0. This means weattach two discs along the map z 7→ z, so CP 1 is just the 2-sphere.
Finally, consider CP 2, which is the union of a 0-handle, 1-handle and 2-handle. We have
B0 = [1, z, w] : |z|, |w| ≤ 1B1 = [z, 1, w] : |z|, |w| ≤ 1B2 = [z, w, 1] : |z|, |w| ≤ 1
We attach a 2-handle to B0 via ϕ1 restricted to ∂D × D, which maps (z, w) to [z, 1, w] =[1, 1/z, w/z] = [1, z, zw] ∈ B0. The 4-handle is attached to B0 ∪ B1 via the restriction of ϕ2
to ∂(D ×D), which maps (z, w) to [1, zw, z] on the ∂D ×D part, and maps (z, w) to [zw, 1, w] onthe D × ∂D part.
30

There is a natural handlebody decomposition on the product of two handlebodies. Considerthe simplest case
X = Dn1 ∪ϕ1 h1 h1 = Dk1 ×Dn1−k1 ϕ1 : ∂Dk1 ×Dn1−k1 → ∂Dn1
Y = Dn2 ∪ϕ2 h2 h2 = Dk2 ×Dn2−k2 ϕ2 : ∂Dk2 ×Dn2−k2 → ∂Dn2
Then X × Y has the following handlebody decomposition
X × Y = Dn1 ×Dn2 ∪ϕ1×id h1 ×Dn2 ∪id×ϕ2 Dn1 × h2 ∪ h1 × h2
Here we are thinking of h1 × Dn2 as an (n1 + n2)-dimensional k1-handle since it is just Dk1 ×Dn1−k1 × Dn2 (the second two factors are like a (n1 + n2)-ball), and Dn1 × h2 is an (n1 + n2)-dimensional k2-handle since it is just Dn1 ×Dk2 ×Dn2−k2 (here the factors are out of order, butthat does not matter). We also think of h1× h2 as an (n1 +n2)-dimensional (k1 + k2)-handle sinceit is just Dk1 ×Dn1−k1 ×Dk2 ×Dn2−k2 , and the attaching region of this handle is
∂Dk1 ×Dn1−k1 ×Dk2 ×Dn2−k2 ∪ ∂Dk2 ×Dn2−k2 ×Dk1 ×Dn1−k1
so the attaching map is ϕ1 × id∪ϕ2 × id.Note that if the handlebody decompositions of X and Y are induced by Morse functions f and g,
respectively, then the product handlebody decomposition of X×Y is the same as the decompositioninduced by the Morse function h : X ×Y → R defined by h(x, y) = f(x) + g(y). The critical points(x, y) ∈ X × Y of h are precisely where dh(x,y) = dfx + dgy = 0, hence dfx = 0 and dgy = 0 and sox must be a critical point of f and y a critical point of g. If the critical point x is of index k and yof index l, then (x, y) is of index k + l, for the Hessian is of the form
Hh(x, y) =
( ∂2f∂xi∂xj
)0
0(
∂2g∂yi∂yj
) =(Hf (x) 0
0 Hg(y)
)
3.2 Handle Moves
Any manifold admits many “different” handlebody decompositions, so we want to find a set of movesthat we could perform on handles in order to bring one handlebody presentation into another. Firstwe show how to add a (k−1)-handle and k in a specific way such that the result manifold does notchange; that is, the handles cancelled each other. Let X be an n-manifold with boundary. Write∂Dk as a union of upper and lower hemispheres, Sk−1 = Dk−1
+ ∪Sk−2 Dk−1− . Attach Dk ×Dn−k to
∂X via an embedding of Dk−1− × Dn−k in ∂X (this is not attaching a k-handle). This does not
change the diffeomorphism type of X since it is just take the boundary sum of X with an n ball.We are going to show how to decompose this attached copy of Dk × Dn−k into a (k − 1)-handleand k-handle. Let J be a small neighborhood of Dk−1
+ in Dk, so that J = Dk−1+ ×D1, and let Dk
0
be the disc left from slicing J off of Dk. Then J ×Dn−k is a (k − 1)-handle attached to ∂X, andDk
0 ×Dn−k is a k-handle attached to ∂(X ∪J ×Dn−k). This process of creating a pair of cancelinghandles is called handle creation/cancellation.
Sometimes it is possible to find a (k − 1)-handle and k-handle that are situated in X so thatthey cancel like the above.
Proposition 3.2. A (k− 1)-handle h and a k-handle h′ can be cancelled if the attaching sphere ofh′ intersects the belt sphere of h transversely in a single point.
31

Proof.
The process of finding two handles that cancel each other and canceling them from the han-dlebody is called handle cancellation. We can use handle cancellations to show that connectedhandlebodies can be made to have only one 0-handle and one n-handle.
Proposition 3.3. If X is a compact and connected n-manifold, then X admits a handlebodydecomposition with exactly one 0-handle and one n-handle.
Proof. First we eliminate all 0-handles except for one. The 0-handles X0 of X is just a disjoint unionof n-balls, and since X is connected and since 1-handles are the only handles with disconnectedattaching spheres, we have that each ball of X must be connected to some other ball via a 1-handle.The attaching sphere of a 1-handle is a pair of points, and the belt sphere of a 0-handle is Sn−1, soit is clear by proposition 3.2 that if a 1-handle connects two 0-handles then we can cancel one ofthe 0-handles and the 1-handle. Repeating this for all 1-handles connecting two 0-handles we cancancel all 0-handles except for one.
Now that we have eliminated all 0-handles except for one, take the dual handlebody decompo-sition. This is a handlebody decomposition with a unique n-handle, but possibly many 0-handles.Apply the procedure from before to eliminate all 0-handles except for one and we are left with ahandlebody with a unique 0- and n-handle.
Let (h1, ϕ1) and (h2, ϕ2) be two k-handles with attaching maps, and suppose they are attachedto X simultaneously: X ∪ϕ∪ϕ2 (h1 ∪ h2). Let A be the image of the attaching sphere of h1 in ∂Xand B the image of the belt sphere in ∂X. We can isotope the attaching map of h1, which can alsobe thought of as isotoping the attaching sphere and the framing of the attaching sphere, and theresulting manifold will not change. By isotoping the attaching sphere we are, intuitively, “sliding”the handle h1 around ∂(X ∪ h2). Now, slide the attaching sphere of h1 over the handle h2 untilthe attaching sphere of h1 intersects the belt sphere of h2. Since the attaching sphere of h1 is ofdimension k−1 and the belt sphere of h2 is of dimension n−k−1, we have that they will intersectat a point p, and TpA ⊕ TpB is a codimension 1 subspace of Tp∂(X ∪ h2). This means there aretwo directions we can move A past B (corresponding to the two components of the complement ofthe hyperplane TpA ⊕ TpB). One direction will slide h1 back to where we started. If we push Athe other way, and continue sliding h1 until the attaching sphere lies entirely in ∂X, then we get anew handlebody which is the result of sliding the handle h1 over h2. Without loss of generalitywe can also assume that as we slide h1 over h2, the attaching sphere of h1 stays inside some discDk × pt of h2.
We have not change the manifold X ∪ h1 ∪ h2 by sliding the handle h1 over h2 (since we justisotoped the attaching sphere around), but the framing of h1 might have changed in the process.For example, figure 3.4 shows that sliding a trivially attached 1-handle across a twisted 1-handleresults in another twisting.
It turns out these two moves on handlebody decompositions can always determine when twohandlebody decompositions give the same manifold.
Proposition 3.4. For any two relative handlebody decompositions of a compact pair (X, ∂−X)(with handles attaching in increasing order), it is possible to bring one decomposition into theother via a finite sequence of creation/cancellation of handle pairs, handle slides, and isotopies ofattaching maps.
32

Figure 3.4: A handle slide that changes the framing of a handle
3.3 The Fundamental Group and Homology of a Handlebody
The combinatorial presentation of a manifold as a handlebody immediately gives a presentation ofthe fundamental group of the manifold. Suppose X is a handlebody with unique 0-handle, and givean orientation to the core of each 1-handle. We can make the oriented cores D1 × 0 into orientedloops in X1 by connecting the end points with an oriented, straight line segment to the origin inX0 = Dn. These loops are generators of the free group π1(X1, x0). As we attach 2-handles wewill be adding relations to π1(X1, x0) to get π1(X2, x0). In particular, express the attaching circle∂D2×0 of a handle in terms of the loops in X1 to get the relation that attaching this 2-handle adds.Handles of higher index do not add any other relations since their attaching spheres are simplyconnected, so in particular π1(X2, x0) = π1(X,x0). Note that the above description of π1(X) isanalogous to the presentation of π1(X) in terms of a CW-decomposition of a space.
Next we develop a homology theory in terms of handlebodies, which is similar to cellular ho-mology derived from a CW-complex. For a relative handlebody (X, ∂−X), let the k-chains of ourhomology theory be Ck(X, ∂−X) = Hk(Xk, Xk−1), where Hk(−,−) is just regular singular homol-ogy, hence Ck(X, ∂−X) can be thought of as formal linear combinations of k-handles (once thecores of the handles are given a fixed orientation). The boundary operator ∂k : Ck(X, ∂−X) →Ck−1(X, ∂−X) is defined by the long exact sequence of the triple (Xk, Xk−1, Xk−2). In particular,we have the following pieces of long exact sequences
· · · −→ Hk(Xk, Xk−1) ∆k−→ Hk−1(Xk−1) −→ · · ·
· · · −→ Hk−1(Xk−1)j∗−→ Hk−1(Xk−1, Xk−2) −→ · · ·
where ∆k is the connecting morphism and j∗ is induced by inclusion of the pairs (Xk−1, ∅) →(Xk−1, Xk−2). Then we define ∂k = j∗ ∆k, and clearly ∂2 = 0 since ∆k j∗ = 0. If X is oriented,then there is a more geometric definition of ∂. Let h be a k-handle with attaching sphere A, andlet Bi be the belt sphere of each (k − 1)-handle hi. Then
∂kh =∑i
(A ·Bi)hi (3.1)
where A · Bi is the intersection number computed in ∂+Xk−1. Since ker ∂ ⊂ im ∂ we defineHk(X) = ker ∂k/ im ∂k+1, and call this the k-th handlebody homology group of X (this termis not standard). We can get a homology theory Hk(X, ∂−X;G) with coefficients in any abeliangroup G by defining Ck(X, ∂−X;G) = Ck(X, ∂−X)⊗Z G with boundary operator ∂ ⊗ id. We can
33

also dualize this construction to get handlebody cohomology. In particular, set Ck(X, ∂−X;G) =Hom(Ck(X, ∂−X), G) and let δk : Ck(X, ∂−X;G)→ Ck+1(X, ∂−X;G) be the induced differential,and define Hk(X, ∂−X;G) = ker δk/ im δk−1. This is called the k-th handlebody cohomologygroup of X. If there is risk of confusing the handlebody chain and homology groups with otherhomology theories (such as singular homology), we may sometimes write them as CHBk (X) andHHBk (X). Further, if ∂−X = ∅, then we will write these groups as Ck(X;G), Hk(X;G), and so on.
Since handle moves do not change the diffeomorphism type of X we have that the homology andcohomology groups will be the same. However, handle moves will add extra relations or changeour canonical generators. Suppose a k-handle h and (k − 1)-handle hi form a canceling pair sothat A · Bi = ±1, where A is the attaching sphere of h and Bi is the belt sphere of hi. Then∂h = ±hi+
∑j 6=i ajhj for some integers aj . When we cancel these handles we will add the relations
h = 0 and hi = ∓∑j 6=i ajhj to the chain groups. On the other hand, sliding a handle h across ahandle h′ changes the canonical generators of Ck(X) by replacing the basis element h with h± h′.Example 3.2. Since Sn has a handlebody decomposition 0-handle ∪ 1-handle, we can easily seethat its handlebody homology is Hk(Sn) = Z for k = 0, n and 0 for 0 < k < n. A more interestingexample is writing S3 as a union of a 0, 1, 2 and 3-handle, S3 = h0 ∪ h1 ∪ h2 ∪ h3. The standardlyembedded solid torus X1 = S1 × D2 in S3 is a 0-handle ∪ 1-handle. The attaching circle of the2-handle we attach to X1 is just the longitude S1 × ∗, where ∗ is any point on the boundaryof D2, and let X2 be the result of this attachment. Then ∂X2 is just S2, and so we attach the3-handle in the only way possible, and the result is X3 = S3.
We have Ci(X) = Z 〈hi〉. Since there are no (−1)-handles, we have ∂0 = 0. The attachingsphere of h1 intersects the belt sphere of h0 at two points, but different signs, so ∂1(h1) = 0. Theattaching sphere of h2 intersects the belt sphere of h1 at one point, which we can arrange to haveintersection number +1, hence ∂2(h2) = h1. Finally, the attaching sphere of h3 intersects the beltsphere of h2 at two points, but with different signs, so ∂3(h3) = 0. Taking homology we see againthat H0(S3) = H3(S3) = Z and H1(S3) = H2(S3) = 0.
Example 3.3. We saw in example 3.1 that CPn admits a handlebody decomposition with onek-handle for each even integer k between 0 and 2n. So Ck(CPn) = Z for all even 0 ≤ k ≤ 2n, and0 for all other k. This implies that all the differentials are zero, hence Hk(CPn) = Ck(CPn).
3.4 2-Dimensional Handlebodies
Two dimensional handlebodies have simple descriptions since there are so few ways to attach 2-dimensional k-handles (k = 0, 1, 2). The 0- and 2-handles are just 2-discs, and a 1-handle is a bandI × I. The attaching region of this band consists of two disjoint intervals I t I, and there are twoways to attach the band to a 0-handle: without a twist, or with a twist. Once the 1-handles areattached, there is a unique way to attach the 2-handles so that we get a closed surface (just fillthe holes!), so we can draw diagrams of 2-dimensional handlebodies by just drawing the 0-handle∪ 1-handles. Some examples of these decompositions are shown in figure 3.5, where the first imageis RP 2, the second is T 2#RP 2, and the third is T 2.
3.5 Heegaard Diagrams
Heegaard splittings are an old method for constructing 3-manifolds, and we will see that it is equiv-alent to 3 dimensional handlebody. Although we get nice combinatorial pictures for 3 dimensionalhandlebodies, called Heegaard diagrams, they were still difficult to use. However, much later,
34

Figure 3.5: Examples of 2-dimensional handlebody diagrams
many invariants were built from Heegaard diagrams, including a recent variation of LagrangianFloer homology, which provides powerful invariants of 3- and 4-manifolds.
We define a handlebody of genus g to be a 0-handle ∪ 1-handles such that the result isorientable, i.e. the interior (in the Jordan sense) of an orientable, genus g surface. If H1 andH2 are handlebodies of genus g, then for any orientation-reversing homeomorphism ϕ : ∂H1 →∂H2 of their boundaries, we can form the orientable, compact 3-manifold H1 ∪ϕ H2. Conversely,given a 3-manifold M , it is always possible to find a pair of embedded submanifolds H1, H2, bothhomeomorphic to a handlebody of genus g, such that ∂H1 = ∂H2 (this is proved below). In eithercase we call this a Heegaard splitting, or Heegaard decomposition, of the 3-manifold.
Theorem 3.1. Every compact, orientable 3-manifold admits a Heegaard splitting.
Proof. We will give two different proofs.
• The first proof is more geometric, using the fact that every 3-manifold has a triangulation.Let K be a triangular of M , and let K ′ and K ′′ denote the first and second barycentricsubdivision of K respectively. Let us recall how the barycentric subdivision is defined. Takea 2-face σ in the triangulation and connect, with a new edge, the barycenter of σ with eachvertex of σ and the midpoint of each edge of σ. This divides σ into 6 new 2-faces. Thenwe can divide each 3-face ρ into 24 new 3-faces by coning the barycenter of ρ over eachsubdivided face of ρ. Performing this operation on all faces of K gives us a new triangulationof M , called the first barycentric subdivision K ′. Performing this operation again gives usthe second barycentric subdivision K ′′.
Let H1 be the union of the 3-faces in K ′′ that do not intersect the 1-faces of K, and let H2
be the closure of the complement of H1. Then H1 and H2 are handlebodies which intersectprecisely at their boundaries. This gives a Heegaard splitting of M .
• The second proof is Morse theoretic, and is the beginning of more versatile methods in lowdimensional topology via Morse theory. As we will see later (theorem 4.6), any smoothmanifold admits a self-indexing Morse function f : M → [0, n] with unique index 0 and indexn critical points. Let f : M → [0, 3] be such a Morse function for our 3-manifold, and letH1 = f−1[0, 3/2] and H2 = f−1[3/2, 3]. If f has g index 1 critical points, then H1 is a 0-handle with g 1-handles attached, hence a genus g handlebody. If we dualize the handlebodydecomposition we see that H2 is a 0-handle with h 1-handles attached, where h is the numberof index 2 critical points. Since ∂H2 = ∂H1 = a surface of genus g, we have that g = h, and
35

Figure 3.6: Standardly embedded handlebody
so H2 is also a handlebody of genus g. Therefore M has been expressed as a union of twohandlebodies along their boundary.
The proof of theorem 3.1 is a little discouraging since any manifold admits many triangula-tions, and hence many splittings. But, there is a nice combinatorial picture to help us understandthe structure of a Heegaard splitting. Let H1 and H2 be two copies of the standardly embeddedhandlebody (see figure 3.6), and let Σ be the standardly embedded surface of genus g. Take anorientation-preserving homeomorphism ϕ1 : ∂H1 → Σ and an orientation-reversing homeomor-phism ϕ2 : ∂H2 → Σ, and form the compact, orientable 3-manifold M = H1 ∪ϕ−1
2 ϕ1H2. Let
α1, . . . , αg be the image of the standard circles in Σ (the thin circles in figure 3.6) under ϕ1, andβ1, . . . , βg the image of the standard circles in Σ under ϕ2. The curves α1, . . . , αg are collectivelyknown as the α-curves, and are mutually disjoint, and the curves β1, . . . , βg are collectively knownas the β-curves, and are also disjoint.
We now have a picture associated to any Heegaard decomposition: its a surface with 2g curvesdrawn on it. Many times we will take one of the collections of curves to be the standard curves,which would mean that ϕ1 or ϕ2 is just the identity, in which case we will not even draw them.The data of the surface Σ with these 2g embedded curves is called the Heegaard diagram ofthe splitting. We would like to know that these embedded curves somehow uniquely determinethe 3-manifold obtained from gluing the handlebodies together, but first we state a small technicallemma that will be used repeatedly in these notes.
Lemma 3.1. Let X and Y be two n-manifolds with homeomorphic boundaries, and let Z = X∪f Ybe the space formed by gluing X and Y together along a homeomorphism f : ∂X → ∂Y . Ifτ : ∂X → ∂X is any homeomorphism that extends to a homeomorphism τ : X → X, then Z ishomeomorphism to Z ′ = X ∪fτ Y .
Proof. There are embeddings of X and Y into Z by sending a point to its equivalence class in Z.If x ∈ X, y ∈ Y are in the interior, then the corresponding points in Z are [x] = x and [y] = y,whereas if x ∈ X, y ∈ Y are boundary points, then [x] = x, f(x) and [y] =
y, f−1(y)
. Let
X and Y denote the images of X and Y under these embeddings so that X ∩ Y is just the set ofequivalence classes with representative in ∂X or ∂Y . We define a map g : Z → Z ′ on a point z inX or Y by the following
g(z) =
[τ−1(x)] z ∈ X[y] z ∈ Y
where x ∈ X and y ∈ Y are representatives of z. This map is clearly well-defined. In order for itto be continuous we need [τ−1(x)] = [y] in Z ′ for any z = x, y in X ∩ Y (i.e. y = f(x)). This iseasy to see for on one side we have
[τ−1(x)] = [τ−1(x)] =τ−1(x), f(τ(τ−1(x))
=τ−1(x), f(x)
36

and on the other side we have
[y] = [f(x)] =τ−1(x), f(x)
Therefore the map is continuous, and now it is clear that it is even a homeomorphism.
Theorem 3.2. The homeomorphism type of the manifold resulting from gluing two handlebodiestogether depends only on the image of the standard meridians under the gluing map, hence equalHeegaard diagrams describe homeomorphic manifolds.
Proof. Suppose we are gluing genus g handlebodies H1 and H2 together via a homeomorphismf : ∂H1 → ∂H2. We can glue these handlebodies together in a two step process. First, letα1, . . . , αg denote a small tubular neighborhood of each standard meridian in H1 (hence these areannuli), and let D1, . . . , Dg denote the thickened discs these annuli bound in H1. Then we can firstattach the discs Di to H2 via f to obtain the intermedia space M ′. Now we are left with attachingH1\(D1 ∪ · · · ∪ Dg) to M ′, but this is topologically a ball, and so any homeomorphism from theboundary of this ball to ∂M ′ (which is just a sphere) can be extended to the interior of the ball,and hence any gluing map will give a homeomorphic space by the above gluing lemma. Thereforethe homeomorphism type of H1 ∪f H2 depends only on the images of the αi curves.
We can also define Heegaard diagrams axiomatically. Let us temporarily say that an H-diagramis a surface Σ of genus g and embedded curves α1, . . . , αg, β1, . . . , βg such that the α-curves aredisjoint and the complement of their union is connected, and similarly for the β-curves.
Theorem 3.3. An H-diagram (Σ, α1, . . . , αg, β1, . . . , βg) corresponds to the Heegaard diagram ofsome splitting.
Proof. Let αi, βi be curves with the above properties. First we claim that cutting Σ along theα-curves yields a 2-sphere with 2g holes. Suppose that Σ with the α-curves removed is a surfaceof genus h with 2g holes. Then its Euler characteristic would be 2 − 2h − 2g. On the otherhand, removing circles from surfaces that do not separate the surface does not change the Eulercharacteristic, so we should have 2−2g = 2−2h−2g, hence h = 0, and so Σ\α1, . . . , αg is a spherewith 2g holes.
Since Σ with the removed α-curves is just a sphere with 2g holes, we can homeomorphicallydeform it so that it is in the standard position of a handlebody of genus g with its standard circlescut out. Now it is easy to find a handlebody of genus g with homeomorphism of its boundaryonto Σ taking its standard circles to the α-circles. This can be done for the β curves in the sameway.
Therefore H-diagrams and Heegaard diagrams are equivalent notions, so we will refer to both asHeegaard diagrams from now on. The condition that the complement of the union of the α-curvesin Σ is connected is equivalent to saying that the homology classes of α1, . . . , αg span a rank gsubmodule of H1(Σ) ∼= Z2g.
There is also a Morse theoretic way of thinking of Heegaard diagrams. Let f : M → [0, 3]be a self-indexing Morse function with unique maximum and minimum, and let H1 = f−1[0, 3/2],H2 = f−1[3/2, 3] and Σ = f−1(3/2). By theorem 3.1 we know that H1 and H2 are handlebodiesof the same genus, say g. Let P1, . . . , Pg be the index 1 critical points of f , and Q1, . . . , Qg be theindex 2 critical points. Let αi consist of the points that flow to Pi under −∇gf , and let βi consistof the points that flow to Qi under +∇gf . Then Σ(α1, . . . , αg, β1, . . . , βg) is a Heegaard diagramfor M .
37

Figure 3.7: Heegaard diagrams of S1 × S2, S3,RP 3 respectively
Example 3.4. There is only one Heegaard splitting of genus 0. In this case we have a manifoldM expressed as M = D1 ∪D2 where D1, D2 are 3-balls. Let ϕ : D1 → S3 be an embedding of thefirst 3-ball onto the upper-hemisphere of S3. The restriction of ϕ to ∂D1 = ∂D2 can be extendedto a homeomorphism from D2 to the lower-hemisphere of S3 (by Alexander’s lemma). Pastingthese homeomorphisms together gives a homeomorphism of M with S3, hence all genus 0 Heegaardsplittings are S3.
Example 3.5. The standard Heegaard splitting of S3 is to take the standardly embedded solidtorus H1 in S3, and let H2 be the complement of H1 in S3. The gluing map is just the identity.The standard orientation on S3 induces orientations on H1 and H2. If we let n denote the outwardpointing normal vector field on ∂H1, then the orientation of H1 induces an orientation on ∂H1 bychoosing the equivalence class of bases at a tangent space such that adding n gives the equivalenceclass of bases from the induced orientation on H1. Do something similar to get an orientation on∂H2 induced by H2. Clearly the two orientations induced on ∂H1 = ∂H2 are different, thereforethe gluing map is orientation reversing. This is why we require the gluing map to be orientationreversing in our definition of Heegaard splitting.
Example 3.6. We can also classify all genus 1 splittings. All such splittings are given by anorientation reversing homeomorphism f : T → T , and the isotopy classes of these maps are inbijective correspondence with integer matrices
A =(−q rp s
)detA = pr + qs = 1
so p and q are relatively prime or one is 0 and the other is ±1. We use −q here because we requiredour gluing homeomorphism to be orientation reversing, so the determinant of this matrix should be−1, which can be written simply as pr + qs = 1 with our sign choice. This homeomorphism mapsthe meridian µ to the curve −q · µ + p · λ, i.e. the meridian wraps −q times around the meridianand p times around the longitude. Let M be the manifold resulting from gluing to copies of thesolid torus via f . It is easy to see that M depends only on the image of µ under f by using anargument similar to theorem 3.2. Thus, M is completely determined by the relatively prime pairof integers (p, q), and we call this space the (p, q) Lens space and denote it by L(p, q).
The Heegaard diagram of L(p, q) is just a curve on the torus that wraps −q times aroundthe meridian and p times around the longitude. One can prove that L(p, q) = L(−p, q) andL(p, q) = L(p, q + np) for any integer n, so we can assume p ≥ 0 and 0 ≤ q ≤ p− 1. But, if p = 0then we are forced to have q = ±1, and if q = 0 we are also forced to have p = ±1. In these caseswe have L(±1, n) = S3 for all integers n and L(0,±1) = S1 × S2, so disregarding these exampleswe can assume p ≥ 2 and 1 ≤ q ≤ p− 1. We also have L(2, 1) = RP 3.
Example 3.7. Heegaard diagrams can be quite complicated, for example see figure 3.8. We willshow later that this 3-manifold is simply connected.
38

α1
α2
Figure 3.8: Heegaard diagram of a simply connected 3-manifold
Let us reconcile the above theory of Heegaard splittings of 3-manifolds with our general theory ofhandlebodies. A handlebody of genus g is a 0-handle ∪ 1-handles such that the result is orientable.This is just the first step in building a 3-dimensional handlebody, so let us denote it by X1. Next wecould attach some 2-handles (we certainly cannot attach a 3-handle yet, unless g = 0). Attaching a2-handle is completely determined by the image of the attaching sphere ∂D2×0 (which we will callthe attaching circle in this case) and the framing of the attaching circle, which are parameterizedby π1(O(1)) = 0. Therefore, attaching the 2-handles is equivalent to specifying a collection ofembedded circles in X1, which is just a Heegaard diagram, and let X2 be the result. If ∂X2 is acollection of S3’s, then there is a unique way to cap these off with 3-handles so that the result isa closed 3-manifold. This is precisely the case we draw g embedded curves on X1 such that thecomplement of their union is connected, so such a picture uniquely determines a 3-manifold.
Now we see that a Heegaard splitting is simply a 3-dimensional handlebody, and a Heegaarddiagram is just a collection of curves drawn on X1, we would like to translate our machinery ofhandle moves, handlebody homology and computation of fundamental groups into the Heegaardsetting. We start with handle moves. We fix X1 to be the standardly embedded handlebody ofgenus g since all the information in a 3-dimensional handlebody is in the attaching circles of the2-handles. In the handlebody theory we could isotopy the attaching maps, which just means thatwe can isotopy the α and β curves on the surface of genus g. To create a canceling pair of 1-and 2-handles simply increase the genus of X1 by one (i.e. add a 1-handle) and add the attachingcircle that goes once around the longitude of the new 1-handle but does not venture into the oldpart of X1. Attaching the 2- and 3-handles to this new Heegaard diagram will give the originalmanifold connect summed with S3 (recall the Heegaard diagram of S3, figure 3.7), hence it will bediffeomorphic to the original manifold.
Handle slides are a little more difficult to understand. Sliding the 1-handles is very simple, anddoes not produce anything interesting since we required X1 to be orientable, hence allowed onlyone type of framing on the 1-handles. To get a feeling for sliding 2-handles, consider sliding twohandles that are attaching to D3. Figure 3.9 shows how to do this in the obvious way. Here wesliding the attaching circle of one handle through the disc D2 × 1 of the other handle. A betterway to look at this is just to look at the attaching circles. Then we see that sliding 2-handles isequivalent to taking a parallel of one circle, and forming the banded sum of this circle with theother attaching circle (see figure 3.10).
Now to slide a 2-handle h1 across another 2-handle h2 in a Heegaard diagram make a parallel
39

Figure 3.9: Sliding 3-dimensional 2-handles
Figure 3.10: Sliding 3-dimensional 2-handles
copy of the attaching circle α2 of h2 and form the band sum of the attaching circle α1 of h1 withthe parallel of h2. If we let γ denote the band sum of α1 and the parallel of α2, then note thatα1, α2, and γ bound a pair of pants in X1. Conversely, if there are two attaching circles α1, α2 on∂X1 and another curve γ on ∂X1 such that γ does not intersect any other attaching curves andα1, α2, and γ bound a pair of pants, then we can discard any one of these three curves withoutchanging the resulting 3-manifold. See figure 3.11 for a non-trivial example of this.
Next we see how to compute the fundamental group of a 3-manifold X from one of its Heegaarddiagrams. Choose a basis x1, . . . , xg for the free group π1(X1), and let ri be the word in x1, . . . , xgrepresenting the i-th attaching circle. Then a presentation of π1(X) is simply 〈x1, . . . , xg : r1, . . . , rg〉.Example 3.8. Consider the Heegaard diagram in figure 3.8. Let x1 denote the standard generatoraround the first hole (counter-clockwise orientation) and x2 the generator around the second hole(counter-clockwise orientation). One can easily check that the curve α1 is represented by thecurve x3
1x22 and α2 is represented by the curve x4
1x32. Therefore a presentation for the manifold
M associated to this Heegaard splitting is π1(M) =⟨x1, x2 : x3
1x22 = x4
1x32 = 1
⟩. The first relation
implies that x31x
32 = x2, and plugging this into the second relation gives x1x2 = 1. Therefore x1
and x2 are inverses in π1(M), hence 1 = x31x
22 = x1 and x2 = 1, and so M is simply connected.
Now we compute the homology of a 3-manifold X from one of its Heegaard diagrams. Weclearly have H0(X) = H3(X) = Z, C1(X) = C2(X) = Zg (if X has g 1- and 2-handles). Further,∂1 = 0 since the attaching spheres of the 1-handles intersect ∂D3 at two points of opposite sign,and ∂3 = 0 for similar reasons. Hence all the homology information of X is contained in ∂2. Given
40

Figure 3.11: Sliding 3-dimensional 2-handles
a 2-handle h, ∂2h is a linear combination of the one handles higi=1, where the coefficient of hi isthe intersection number of h’s attaching circle with hi’s belt sphere. The belt sphere of hi is justthe meridian that bounds a disc (the non-bolded curves in figure 3.6).
Example 3.9. If we label the left and right 1-handles of figure 3.8 by h1 and h2 respectively, andlabel the 2-handle corresponding to the black attaching circle by k1 and the other 2-handle by k2,then a close examination of this diagram shows that
∂2h1 = 3k1 + 2k2
∂2h2 = 4k1 + 3k2
We could also see this by just abelianizing the relations of π1. As a linear transformation H2(X) =Z2 → Z2 = H1(X) it is invertible since its determinant is +1, therefore ∂2 is an isomorphism. Thisimplies that H1(X) = 0 = H2(X), and so X is a homology sphere. In fact, X is homeomorphic toS3, as can be checked by sliding handles.
3.6 Kirby Diagrams
A Kirby diagram is a diagram we can associate to a 4-dimensional handlebody X. We start witha 4-ball D4, and think of its boundary ∂D4 = S3 as R3 ∪ ∞. We attach 1-handles to this viaan embedding of D3 tD3. There is the issue of framing (there are two framings), but for now letus choose the framing such that X1 = \mS1 × D3 (here we are attaching m 1-handles). We canrepresent this in R3∪∞ by drawing 2m disjoint embedded 3-balls in R3∪∞ and pairing themso that when we identify pairs in an orientation reversing manner we get X1 = \mS1 ×D3.
To attaching a 2-handle to X1 we specify a knot in X1 (the attaching circle) and label it witha framing. So, a diagram of X2 consists of m pairs of 3-balls and a collection of arcs that eitherstart and end on the boundary of the 3-balls, or form a closed loop. We can specify a framing ona knot component by a nowhere zero normal vector field, or equivalently, a parallel knot. Once wespecify which parallel corresponds to 0 ∈ π1(O(2)) = Z we can get any other framing by addingfull left or right twists. We will choose the parallel which has linking number 0 with the knot tobe the framing corresponding to 0.
It turns out that there is essentially a unique way to attach 3-handles and 4-handles so that weobtain a closed manifold, so our diagram of X can stop here. Things are more complicated when∂X 6= ∅, but we will not deal with that now.
(todo: need more on this...)
Example 3.10. Let us find a Kirby diagram of S2×S2. The 2-sphere has the obvious decompositionS2 = D− ∪ D+, where D− is a 0-handle, D+ a 2-handle, which we think of as the southern andnorthern hemispheres. The attaching map for the 2-handle is just the identity. The handlebodydecomposition of S2 × S2 is just
S2 × S2 =
0−handle︷ ︸︸ ︷D− ×D− ∪
2−handle︷ ︸︸ ︷D+ ×D− ∪
2−handle︷ ︸︸ ︷D− ×D+ ∪
4−handle︷ ︸︸ ︷D+ ×D+
41

First we determine the attaching maps for the 2-handles. One is the map φ1 : ∂D+ × D− →∂(D− ×D−) defined by φ1(x, y) = (x, y), and the other is the map φ2 :
D2 ×D0 ×D0 ×D2
UNFINISHED
Example 3.11. Let us find a handlebody decomposition of S2×S2. Recall that this is the boundaryof the non-trivial D3 bundle over S2.
42

4 Morse Theory
4.1 Morse Functions
We start with a smooth n-manifold M and a smooth function f : M → R. Take a chart (x, U),that is an open set U ⊂ M and a homeomorphism x : U → Rn. If we write x in componentsx = (x1, . . . , xn), then we define the derivative of f at some point p ∈ U with respect to this chartby
∂f
∂xi(p) = Di(f x−1)(x(p))
where Di is the regular derivative of f x−1 : Rn → R in the i-th component. Recall that if (y, V )is another chart, then the derivative of f with respect to these two charts on the overlap are relatedby
∂f
∂yi=
n∑j=1
∂f
∂xj∂xj
∂yi(4.1)
Another way of saying this is to first define the Jacobian matrix of two charts (x, U) and (y, V ).This is the matrix whose (i, j)-entry is equal to ∂xi
∂yj, and it is denoted by Jxy . If we let ∂f
∂x denotethe column vector of derivatives of f , then (4.1) simply says
∂f
∂y= Jxy ·
∂f
∂x
Since ∂f∂xi
is just another smooth map from U to R we can take a second derivative with respect toa chart. The second derivatives calculated with respect to different charts are related by
∂2f
∂yi∂yj=
∂2f
∂xk∂x`∂xk
∂yi∂x`
∂yj(4.2)
As with first derivatives there is another way of looking at this. Let us define the Hessian of fwith respect to the chart x be the matrix whose (i, j)-entry is ∂2f
∂xi∂xj, and it is denoted by Hx
f .Since partial derivatives commute we have that Hx
f is symmetric. We now see that (4.2) can bewritten as
Hyf = (Jxy )t ·Hx
f · Jxy (4.3)
This tells us that even though the Hessian as a matrix is not well-defined (i.e. it depends on thechart), it is well-defined as a bilinear form. There is also a nice coordinate free way of describingthe Hessian. Let ∇ : Γ(TM)×Γ(T ∗M)→ Γ(T ∗M) be any connection on T ∗M , and for any p ∈Mdefine the map Hf (p) : TpM → T ∗pM by
Hf (p)(X) = ∇X(df) (4.4)
This does not depend on the choice of connection, for if ∇ is another connection, then the difference∇− ∇ is tensorial in both arguments and dfp = 0, hence ∇X(df)− ∇X(df) = 0 at p.
Suppose that a point p ∈ M is a critical point of f , i.e. dfp = 0. We say that p is a non-degenerate critical point if detHx
f (p) is nonzero for some chart x, hence every chart by (4.3).We define the index of a critical point p to be the number of negative eigenvalues of the Hessianat p, which is well-defined by (4.3), and is denoted by µ(p). Equivalently, we call the criticalpoint p non-degenerate if Hf (p) does not have 0 for an eigenvalue, and µ(p) is the number of
43

negative eigenvalues of Hf (p). Finally, we define a Morse function is a smooth function with allnon-degenerate critical points.
It turns out that Morse functions look very nice around critical points. The Morse lemma givesa precise statement of this, and will be very important in our discussion of cell decompositionsof spaces via Morse functions. First we recall a basic fact from calculus using the fundamentaltheorem.
Lemma 4.1. Let U be a convex subset of Rn containing 0 and f : U → R a smooth function withf(0) = 0. Then we can write
f(x1, . . . , xn) =n∑i=1
xigi(x1, . . . , xn)
for some gi : U → R with gi(0) = ∂f∂xi
(0).
Proof. For fixed x1, . . . , xn we apply the fundamental theorem of calculus and chain rule to get
f(x1, . . . , xn) =∫ 1
0
df(tx1, . . . , txn)dt
dt =∫ 1
0
n∑i=1
xi · ∂f∂xi
(tx1, . . . , txn) dt
So let gi(x1, . . . , xn) =∫ 1
0∂f∂xi
(tx1, . . . , txn) dt, then clearly gi(0) = ∂f∂xi
(0) and we are done.
Lemma 4.2 (Morse Lemma). Let f : M → R be a smooth function and p ∈ M a non-degeneratecritical point. Then there is a chart y = (y1, . . . , yn) on a neighborhood U of p such that yi(p) = 0and
f = f(p)− (y1)2 − · · · − (yµ)2 + (yµ+1)2 + · · ·+ (yn)2
on U , where µ is the index of p.
Proof. First note that finding a chart so that f can be expressed in the above form is equivalentto finding a chart (x, U) such that on U we have
(f x−1)(t1, . . . , tn) = −t21 − · · · − t2µ + t2µ+1 + · · · t2nwhere ti are real numbers. Therefore we can, without loss of generality, assume that f is defined onsome open set V of Rn (say containing zero), and by performing some translations we can assumep = 0 and f(0) = 0.
Next it is clear that if f can be represented in the above form for some chart (y, U), then wehave
∂2f
∂yi∂yj(p) =
−2 i = j, j ≤ µ2 i = j, j > µ
Therefore the Hessian Hxf is already diagonalized in this coordinate system, and clearly has µ
negative entries along the diagonal. Therefore µ really will be the index of p if we can get f intothe above form.
Let x = (x1, . . . , xn) be the standard coordinates on Rn. By lemma 4.1 we can find functionsgi : V → R such that
f(x1, . . . , xn) =n∑i=1
xi · gi(x1, . . . , xn)
44

and gi(0) = ∂f∂xi
(0). However, since p = 0 is assumed to be a critical point we have ∂f∂xi
(0) = 0, sowe can apply lemma 4.1 to the functions gi to obtain functions hij : V → R such that
gi(x1, . . . , xn) =n∑j=1
xjhij(x1, . . . , xn)
and hij(0) = ∂gi∂xj
(0) = ∂2f∂xi∂xj
(0). Combining the above two expressions yields
f(x1, . . . , xn) =n∑
i,j=1
xixjhij(x1, . . . , xn) (4.5)
If we define hij = 12(hij + hji), then we see that hij = hji and yet still f =
∑xixj hij . Therefore
we can assume that hij = hji. It is also clear that the matrix (hij(0))ij is equal to 12H
xf .
We now simply mimic the proof of the diagonalization of quadratic forms, applied to (hij), toshow that we can find coordinates to bring f into the desired form. By assumption the Hessian isnon-singular, so (hij(0)) is also non-singular. Reordering the coordinate system can assume thath11(0) 6= 0, and so by continuity we have that h11(0) 6= 0 on some small neighborhood V ′ of 0.Let us also assume that h11 > 0 on V ′ (the other case is treated similarly). We introduce a newcoordinate y1 : V ′ → R defined by
y1 =√h11
(x1 +
n∑i=2
xih1i
h11
)(4.6)
The coordinates (y1, x2, . . . , xn) form a chart (in a possibly smaller neighborhood V ′′ of 0). Squaringthis new coordinate gives
(y1)2 = h11
(x1 +
n∑i=2
xih1i
h11
)2
= h11
(x1)2 + 2n∑i=2
x1xih1i
h11+
(n∑i=2
xih1i
h11
)2
= h11(x1)2 + 2n∑i=2
x1xih1i +1h11
(n∑i=2
xih1i
)2
(4.7)
This expression allows us to rewrite (x1)2 as
h11(x1)2 = (y1)2 − 2n∑i=2
x1xih1i − 1h11
(n∑i=2
xih1i
)2
(4.8)
45

Now, using (4.5) and (4.8) we can rewrite f in coordinates (y1, x2, . . . , xn) as
f = h11(x1)2 + 2n∑i=2
x1xih1i +n∑
i,j=2
xixjhij
= (y1)2 − 2n∑i=2
x1xih1i − 1h11
(n∑i=2
xih1i
)2
+ 2n∑i=2
x1xih1i +n∑
i,j=2
xixjhij
= (y1)2 +n∑
i,j=2
xixjhij − 1h11
(n∑i=2
xih1i
)2
Note that had we assumed h11 < 0 on V ′, then we would have −(y1)2 in the above. The terms inthis last expression only involve xi’s for i ≥ 2, so we can repeat the above arguments to find a newcoordinate y2 such that (y1, y2, x3, . . . , xn) is a coordinate system and
f = ±(y1)2 ± (y2)2 ± terms with x3, x4, . . . , xn
Continuing this we get a coordinate system y = (y1, . . . , yn) such that
f = ±(y1)2 ± · · ·+ (yn)2
Since the number of minus signs is equal to µ, which does not depend on coordinate charts, we aredone.
A simple consequence of the Morse lemma is the following.
Corollary 4.1. The critical points of a Morse function are isolated.
4.2 Handlebody Decompositions Induced by Morse Functions
For a manifold M with Morse function f : M → R, let us define the sets Ma = f−1(−∞, a]. If a isnot a critical value, then Ma is a submanifold with boundary. We will now analyze what happensto Ma as a crosses a critical value. Our first theorem towards this says that the diffeomorphismtype of Ma does not change between critical values. First let us develop the notion of gradientvector fields and flows.
Let (M, g) be a Riemannian manifold with Morse function f : M → R. Recall that the metricgives us a canonical isomorphism of tangent spaces with cotangent spaces by mapping a vectorX ∈ TpM to the covector g(X,−) ∈ T ∗pM . The gradient vector field of f is the unique vector field∇gf corresponding to the 1-form df under this isomorphism, hence
g(X,∇gf) = df(X)
for any vector field X. In coordinates (x1, . . . , xn) we can write
∇gf =n∑
i,j=2
gij∂f
∂xj∂
∂xi
where gij are the components of the inverse metric. It is clear that ∇gf vanishes at precisely thecritical points of f .
46

Theorem 4.1. Let [a, b] be an interval that does not contain any critical values and such thatf−1[a, b] is compact. Then Ma is diffeomorphic to M b. In fact, Ma is a deformation retract ofM b.
Proof. First note that the compactness hypothesis would be immediate if we assumed that M iscompact. Let X be a vector field given by
X =∇gf||∇gf ||2
on f−1[a, b], and vanish identically outside some compact set containing f−1[a, b]. Since this vectorfield has compact support it generates a unique 1-parameter group φt : M →M of diffeomorphisms.For fixed p ∈M such that φt(p) lies in f−1[a, b], the function f φ(p) is a map R→ R, and we cancompute (using the chain rule and definition of ∇gf)
df(φt(p))dt
= df(dφt(d/dt)) = g(dφt(d/dt),∇gf) =g(∇gf,∇gf)g(∇gf,∇gf)
= 1
So, the function f φ(p) : R → R is linear; in fact, f(φt(p)) = t + f(φ0(p)) = t + f(p). So, if wetake a point p with f(p) = a, then f(φb−a(p)) = (b − a) + a = b, hence φb−a maps Ma into M b.Similarly, φ−1
b−a = φa−b maps M b into Ma, hence M b is diffeomorphic to Ma, and this proves thefirst part of the theorem.
For the second part of the theorem we can construct the deformation retract explicitly. Considerthe homotopy rt : M b →M b defined by
rt(x) =
x f(x) ≤ aφt(a−f(x))(x) a ≤ f(x) ≤ b
We clearly have r0 = id and r1 is a retract of M b onto Ma, therefore Ma is a deformation retractof M b.
Theorem 4.2. Let f : Mn → R be a smooth function with a non-degenerate critical point p ofindex µ. Let c = f(p) and suppose f−1[c − ε, c + ε] is compact, and contains no critical points off other than p. Then for small enough ε, the manifold M c+ε is diffeomorphic to M c−ε with ann-dimensional µ-handle attached.
Proof. See figure 4.1 for the local behavior of f around the critical point p. Take a chart (x, U)around p as in the Morse lemma. Then the lightly shaded region is the set of points (x1, . . . , xn)with f(x1, . . . , xn) ≤ c − ε, and the medium shaded region is the set of points with c − ε ≤f(x1, . . . , xn) ≤ c + ε. The intersection of the medium shaded region with the (x1, . . . , xµ)-axis isthe set of points (x1, . . . , xµ) with (x1)2+· · · (xµ)2 ≤ ε, hence a µ-dimensional ball. The intersectionof the medium shaded region with the (xµ+1, . . . , xn)-axis is the set of points (xµ+1, . . . , xn) with(xµ+1)2 + · · ·+ (xn)2 ≤ ε, hence a (n− µ)-dimensional ball.
The dark region h in the figure consists of the set of points (x1, . . . , xn) such that
(x1)2 + · · ·+ (xµ)2 − (xµ+1)2 − · · · − (xn)2 ≤ ε and (xµ+1)2 + · · ·+ (xn)2 ≤ δfor sufficiently small δ. Clearly this region is diffeomorphic to Dµ ×Dn−µ, and intersects M c−ε atthe points ∂Dµ ×Dn−µ, i.e.
(x1)2 + · · ·+ (xµ)2 − (xµ+1)2 − · · · − (xn)2 = ε and (xµ+1)2 + · · ·+ (xn)2 ≤ δ
47

xµ+1, . . . , xn
x1, . . . , xµf ≤ c− ε
f ≤ c+ ε
Figure 4.1: Behavior of f around a critical point
One can now use the gradient flow of f to show that M c+ε is diffeomorphic to M c−ε ∪ h, hence aµ-handle was attached.
Theorem 4.2 and figure 4.1 also give an explicit description of the attaching spheres of thehandle attached. If the handle h is attached to M c−ε to obtain M c+ε, then the attaching sphere ofh is precisely where the descending manifold of p intersects the boundary of M c−ε.
Theorem 4.3. If f is a Morse function on a manifold M , and if each Ma is compact, then Mhas a handlebody decomposition with one µ-handle for each critical point of index µ.
4.3 Properties of Gradient Flows
Let us further investigate the properties of flows of gradient vector fields. For this section all of ourmanifolds will be closed.
Proposition 4.1. Every function decreases along its negative gradient flow lines.
Proof. Let f : M → R be C1 and u : R → M a flow line of −∇gf . Since f u is C1 we have, by
48

the fundamental theorem of calculus, that for any b > a
f(u(a))− f(u(b)) =∫ a
b
d
dtf u(t) dt
= −∫ b
adfu(t)(du/dt) dt
= −∫ b
adfu(t)(−∇gf(u(t))) dt
= −∫ b
ag(∇gf(u(t)),−∇gf(u(t))) dt
=∫ b
a||∇gf(u(t))|| dt
≥ 0
Therefore f(u(a)) ≥ f(u(b)), and so f decreased along u.
Proposition 4.2. Letting u be a flow line of f , if u(∞) = p or u(−∞) = p, then p is a criticalpoint of f .
Proof. First suppose u(∞) = p (the other case is similar). We have
limt→∞
∫ t
0||du/dt(s)||2 ds = lim
t→∞(f(u(0))− f(u(t))) = f(u(0))− f(p) <∞
This forces ||du/dt(t)|| → 0 as t→∞. Therefore
||∇gf(p)|| = limt→∞||du/dt(t)|| = 0
and so p is a critical point of f .
Proposition 4.3. If p is a non-degenerate critical point of f , and u is a negative gradient flowline with u(∞) = p, then there are constants C > 0, ε > 0 and T >> 0 such that
d(u(t), p) ≤ Ce−εt
for all t ≥ T .
4.4 Existence of Morse Functions
We have proved quite a bit concerning Morse functions, but we have not yet shown that they alwaysexist. It turns out that not only do they exist, but in some sense, almost all smooth functions satisfythe Morse property. We will prove this result and show that Morse functions can be chosen withspecial properties, such as with “separated” critical points and self-indexing critical points.
Since most theorems that involve the phrase “almost every” invoke Sard’s theorem in some way,we begin with this result. Recall that a smooth function f : M → N is said to have a criticalpoint at p ∈ M if rank f∗p < dimN , and a point q ∈ N is said to be a critical value of f ifq = f(p) for some critical point p ∈M .
Theorem 4.4 (Sard’s Theorem). Let f : Rn → Rm be a smooth function. The critical values of fhave Lebesgue measure zero in Rm.
49

Sard’s theorem gives us an easy proof that Morse functions are numerous on open sets of Rn.
Proposition 4.4. Let f : U → R be a smooth function on an open set U ⊆ Rn. Then there existsnumbers a1, . . . , an such that
f(x1, . . . , xn) = f(x1, . . . , xn)− a1x1 − · · · − anxn
has all non-degenerate critical points. Further, the ai’s can be chosen arbitrary small.
Proof. Define a function h : U → Rn by
h =
h1...hn
=
∂f∂x1
...∂f∂xn
Then the Jacobian of h is
Jh =(∂hi∂xj
)=(
∂2f
∂xi∂xj
)which is just the Hessian Hf of f . So, the critical points of h are precisely where detHf = 0. Bytheorem 4.4 we can find a point a = (a1, . . . , an) ∈ Rn that is not a critical value of h. In fact,there are many such points, and we can choose this point as close to 0 as we want. For this point,define f : U → R by
f(x1, . . . , xn) = f(x1, . . . , xn)− a1x1 − · · · − anxn
Let p ∈ U be a critical point of f , then
0 =∂f
∂xi(p) =
∂f
∂xi(p)− ai
hence h(p) = a. Since a is not a critical value of h we have that p is not a critical point of h, andso detHf 6= 0. Since f and f differ only by a linear function we have that their Hessians are equal,so detH ef = detHf 6= 0, hence p is a non-degenerate critical point of f .
We can use this proposition to prove the more general result
Theorem 4.5. There exists a Morse function on any closed manifold M .
Proof. Start with any smooth function f0 : M → R. We will make a sequence of small changes tothis function to remove degenerate critical points over open sets.
Let Ui be a finite open cover of M by charts, and let ϕi : Ui → R be a collection of bumpfunctions for Ui. Recall that this means that there is a compact set Ki ⊂ Ui such that ϕi ≡ 1 onKi, 0 ≤ ϕ ≤ 1 on Ui and ϕi ≡ 0 outside Ui. Without loss of generality we can assume that Kicovers M . Let Km = K1 ∪ · · · ∪Km and set K0 = ∅.
We will use an induction argument to remove degenerate critical points from Km. Clearly f0
has no degenerate critical points in K0, so let us assume that fm−1 has been constructed withno degenerate critical points in Km−1. Let x : Um → Rn be a chart for Um, then fm−1 x−1 :x(Um)→ R is a function defined on an open set of Rn. By proposition 4.4 we can find small vectora = (a1, . . . , an) such that
fm−1 x−1(x1, . . . , xn)− a1x1 − · · · − anxn
50

has only non-degenerate critical points. We can extend this function to all of M by multiplying bythe bump function, so we define
fm(p) =
fm−1(p)− a · x(p)ϕm(p) p ∈ Umfm−1(p) p /∈ suppϕm
This is a well-defined smooth function on M since ϕm ≡ 0 on the overlap of Um and the complementof suppϕm. Now fm does not have any degenerate critical points on Km, and since fm−1 did nothave any degenerate critical points on Km−1 it follows that fm is a Morse function on Km. Thiscompletes the proof by induction.
The proof of theorem 4.5 actually shows a little more. Since we could pick the numbers a1, . . . , anvery small at each stage we could actually show that the constructed Morse function is C2-close tothe initial function f0, hence there is a Morse function close to any smooth function.
(note: Other theorems to prove)
Theorem 4.6. There is a Morse function f : M → R on any closed manifold M such that ifp, q ∈M are critical points, then f(p) ≤ f(q) if and only if µ(p) ≤ µ(q).
Such Morse functions are called self-indexing, and clearly the image of M under f is precisely[0, n], where n is the dimension of the manifold.
51

5 Kirby Calculus
5.1 Surgery on Links
We have seen that Heegaard diagrams provide a nice combinatorial picture for 3-manifolds, even ifthey are a little unwieldy to work with. This is mostly due to the fact that self-homeomorphismsof high genus surfaces are difficult to understand. We will now present another combinatorialmethod of constructing 3-manifolds, called surgery on links. It has the advantage that we now onlyneed to understand self-homeomorphisms of the torus, but the disadvantage that we now need tounderstand links better.
Given a 3-manifold M , let k be an embedded knot in M and N(k) a tubular neighborhood,which is homeomorphic to D2×S1. Surgery on this knot is the proccess of cutting out the tubularneighborhood and gluing it back in. Since M\N(k) has boundary homeomorphic to S1 × S1 wecan find a homeomorphism ϕ : ∂(D2 × S1) → ∂(M\N(k)) and form the quotient space Mk,ϕ =(M\N(k)) ∪ϕ (D2 × S1), which we call the Dehn surgery on k via ϕ, or simply surgery onk since we are not going to discuss more general surgeries. The construction generalizes to linksby performing it on each link component. Every closed, orientable 3-manifold can be obtained bysuch a construction applied to M = S3, as we will see later.
Proposition 5.1. A surgery Mk,ϕ is completely determined by the image of ∂D2 × ∗ under ϕ.
Proof. The solid torus D2 × S1 can be attached in two steps. Let J be a small segment of S1
containing ∗. Then we can start by attaching D2 × J to M\N(k). This leaves D2 × Jc to beattached along its boundary, which is just a 3-ball being attached along a 2-sphere. There is onlyone way to attach this piece since every orientation preserving homeomorphism of S2 is isotopic tothe identity.
So now a surgery can be described by a knot k and a curve on ∂(M\N(k)), which is where themeridian will be mapped under the attaching map. We can come up with a more combinatorialdescription of this curve, or more specifically, closed curves on the torus. Let α and β be themeridian and longitude of the torus T 2 = S1 × S1 so that π1(T 2) = Z ⊕ Z is generated by [α]and [β]. For p, q integers let γ = pα + qβ denote a curve in the homotopy class p[α] + q[β], i.e.γ wraps p times around the meridian and q times around the longitude. We have the followingcharacterization of these curves.
Proposition 5.2.
1. If a curve γ in the homotopy class p[α] + q[β] has no self-intersections, then either p and qare relatively prime, or one of them is 0 and the other ±1.
2. If two closed curves on the torus are homotopic and without self-intersections, then they areisotopic.
Therefore isotopy classes of curves on T 2 are in one-to-one correspondence with pairs of relativelyprime integers.
Let us apply this to a knot k in S3. Let µ be a canonical meridian of ∂N(k), and let ` be thecanonical longitude of ∂N(k). Recall that this means that lk(`, k) = 0. Choose orientations on µ and` such that the ordered basis (µ, `, n) matches the orientation of S3, where n is the outward pointingnormal to ∂N(k). If we glue a solid torus D2 × S1 into S3\N(k) via ϕ : ∂D2 × S1 → ∂(M\N(k)),then we know ϕ must map the meridian ∂D2 × ∗ to a curve pµ + q`, for some relatively prime
52

integers p, q (or possibly one equal to 0 and the other ±1). Therefore a surgery can now be describedsimply by a knot and an extended rational number p/q ∈ Q ∪ ∞. This is also called rationalsurgery. If q = ±1, then the surgery is called an integral surgery. We call the rational numberp/q the framing index of k, or simply the framing. This discussion applies equally well to knotsembedded in an integral homology sphere.
Here is a simple proposition relating surgeries to Heegaard splittings, as well as a powerfulcorollary.
Proposition 5.3. Let f1, f2 : ∂H → ∂H ′ be homeomorphisms of the surfaces of two handlebodiessuch that f1 = f2 τc, where τc is a Dehn twist along a simple closed curve c in ∂H. Set Mi =H ∪fi H ′ for i = 1, 2. Then M2 is obtained from M1 by an integral surgery along a knot k ∈ M1
isotopic to c.
Proof. Let k be a knot in H obtained from pushing c a little H. Connect a tubular neighborhoodN(k) of k to ∂H via an annulus A ∼= S1 × I such that S1 × 0 corresponds to a longitude k′ on∂N(k) and S1 × 1 corresponds to c. There is a self-homeomorphism ϕ of H\N(k) that is theresult of cutting H\N(k) along A, performing a full twist on one of the rims, and then gluing therims back together. Clearly ϕ is just an extension of τc to H\N(k), but also its restricted to thetorus ∂N(k) is a Dehn twist around k′. Let M ′i = (H\N(k)) ∪fi H ′, i.e. M ′i is Mi with a solidtorus removed. Then M ′1 and M ′2 are homeomorphic via the map
h(x) =
ϕ(x) x ∈ H\N(k)x x ∈ H ′
The fact that M1 and M2 become homeomorphic after removing a solid torus means that M1 isobtained from M2 via a surgery on k. In particular, the meridian µ of ∂N(k) is wrapped aroundµ+ k′, hence it is an integral surgery.
Theorem 5.1 (Lickorish-Wallace). Every closed, orientable 3-manifold M can be obtained froman integral surgery on a link embedded in S3.
Proof. By theorem 3.1 we know that M = H ∪f2 H′, where H,H ′ are handlebodies and f2 is an
orientation reversing homeomorphism of their boundaries. Similarly S3 = H ∪f1 H′. Then f−1
2 f1
is an orientation preserving homomeomorphism of a surface of genus g, hence by the Dehn-Lickorishtheorem ((todo: do this theorem)) we have f1 = f2 τc1 · · · τcn , where τci is a Dehn twist arounda simple, closed curve ci. Therefore by proposition 5.3 we have that M is a sequence of integralsurgeries on knots in S3, or equivalently an integral surgery on a link.
A surgery diagram for S3 is a link diagram with each component labeled with an element ofQ∪∞. The canonical longitude of a knot k can be drawn in a diagram by just drawing a parallelcopy of the knot next to k such that its linking number with k is 0. However, take note that thefirst Reidemeister move will change this canonical longitude, so one needs to be careful. We willnow explain the subtleties of this situation.
Consider the case of integral surgeries on knots in S3, so let k be a knot with integral framingn. This framing uniquely determines (up to isotopy) a longitude ` of k such that lk(k, `), whichis the curve we glue the meridian to when we perform the surgery. What is the meaning of theReidemeister moves in a surgery diagram? It is clear that performing R2 and R3 moves doesnot change the manifold resulting from performing surgery on the knot, so we will continue callingthese moves R1 and R2 on surgery diagrams. However, performing an R1 move makes the longitude
53

Figure 5.1: Belt Trick
Figure 5.2: Ribbon Reidemeister I
wrap one more time around the knot. This is the so-called “belt trick,” and is shown in figure 5.1.This means that the framing of the knot will need to change by ±1, depending on which way youtwist. This move on surgery diagrams will be called R′1 due to its equivalent interpretation as aReidemeister move for ribbons, and is shown in figure 5.2. The inverse of the first R′1 is calledadding a left twist, and the inverse of the other R′1 move is called adding a right twist. Now twosurgery diagrams related by a finite number of R′1, R2 and R3 moves give homeomorphic manifolds,but does the converse hold? Unfortunately no, but there are two more moves one can add, calledKirby moves, for which the converse holds. This is discussed in section 5.2.
Example 5.1. The 1/0 = ∞ surgery on the unknot in S3 results in S3 again since we are justcutting out an unknotted, solid torus and gluing it back in the same way. Performing a 0-surgeryon the unknot means to cut out an unknotted, solid torus H from S3 and glue it back in such thatthe meridian wraps once around the longitude. However, this longitude is precisely the meridian ofthe the solid torus S3\H, so this surgery is really just gluing two solid tori together so that theirmeridians are identified, hence this is S1 × S2.
More generally, a surgery on the unknot in S3 with surgery coefficient −p/q (p and q relativelyprime or one equal to 0 and the other 1) results in L(p, q). This is because we cut out an unknotted,solid torus H from S3 and glue it back it so that the meridian wraps p times around the longitudeand q times around the meridian. However, H’s meridian is precisely S3\H’s longitude, and H’slongitude is precisely S3\H’s meridian, hence we are just gluing together two solid tori so thatthe meridian of one gets wrapped p times around the longitude and q times around the meridianof the other torus. This is precisely the Heegaard splitting description of L(p, q). Compare thiswith example 3.6. We can also find a surgery diagram for L(p, q) that has only integral surgerycoefficients. See figure 5.3.
Let ki, 1 ≤ i ≤ n, denote the components of a surgery diagram of some link, let ki be framedby pi/qi and let M be the 3-manifold resulting from performing this surgery. If we let K =S3\(N(k1) ∪ · · · ∪ N(kn)) be the knot complement, then H1(K) = Zn and is generated by the
54

Figure 5.3: Surgery diagrams for S1 × S2, L(p, q) and L(pq − 1, q)
meridians µi of the link. When we glue in a solid torus S1×D2 so that ∗× ∂D2 is wrapped pitimes around the meridian of ki and qi times around the longitude, when add a relation to H1(K).Namely, we add the relation piµi + qiλi = 0, where λi is the canonical longitude of ki, since weare essentially filling this curve with a disc. The longitudes can be expressed as a relation in termsof the µi’s. Since lk(ki, λi) = 0 we have that λi bounds a surface Fi (i.e. a Seifert surface) inS3\N(ki) (but not necessarily in K). Cut a small disc out of Fi at each intersection point of adifferent component kj with Fi, and orient it positively if the intersection is positive and negativelyif the intersection is negative. Since kj and Fi intersect lk(ki, kj) times (counted with sign), wehave λi =
∑j 6=i lk(ki, kj)µj . We have proved the following.
Proposition 5.4. For a surgery diagram with components k1, . . . , kn and framings p1/q1, . . . , pn/qn,the first homology of this surgery is the free abelian group on n generators modulo the relationspiµi + qi
∑i 6=j lk(ki, kj)µj = 0.
Corollary 5.1. For a surgery diagram with components k1, . . . , kn and integral framings p1, . . . , pn,let A be the linking matrix of this link with respect to any orientation. Then the first homology ofthis surgery is isomorphic to Zn/ imA.
Corollary 5.2. If the linking matrix A has detA = ±1, then the surgery is a homology sphere. Inparticular, a surgery on any knot with framing ±1 is a homology sphere.
5.2 Kirby Moves
We now describe two basic moves that can be performed on surgery diagrams that do not changethe resulting surgered manifold. If a link L can be written as L = L1 ∪ L2, where L1 and L2 arelinks that can be separated by a ball, then clearly a surgery on L is diffeomorphic to the connectedsum of the surgeries on each L1 and L2. So, if we add an unknotted, unlinked component to anylink L with framing ±1, surgery on this new link is the connected sum of the surgery on L and thesurgery on the unknot with framing ±1, which is just S3, hence the manifold is unchanged. Theaddition or removal of an unknotted, unlinked component with framing ±1 from a surgery diagramis called the first Kirby move (K1).
Next, suppose our link L is expressed as L = k1 ∪ k2, where k1 and k2 are knots with framingn1 and n2, and are not necessarily unlinked. Let ` be a longitude of k2 defining its framing (i.e.lk(k2, `) = n2), and let k′1 be the connected sum of k1 with ` along a band disjoint from L and `,and let L′ = k′1 ∪ k2. We then give k′1 the framing n1 + n2 + 2 lk(k1, k2), where the linking numberis computed with respect to the orientations on k1 and k2 that induce an orientation on k′1 (thereare only two, and both have the same linking number). Then surgery on L gives the same manifoldas surgery on L′, but we will wait to show this until later. This process of “adding” the componentk1 to k2, sometimes also called “sliding” k1 across k2, is the second Kirby move (K2). Note that
55

Figure 5.4: Separating an unknotted component from a strand
the link L′ will of course depend on the band we choose in forming k′1. Amazingly these two movesare enough to get between any two surgery diagrams of the same manifold.
Theorem 5.2 (Kirby). Two manifolds presented as a surgery on some links are orientation pre-servingly homeomorphic if and only if one link can be obtained from the other via a finite sequenceof K1 and K2 moves.
We shall now develop many “secondary” moves from K1 and K2 that are easier to apply directly.
Example 5.2. Suppose there is an unknotted component of L with framing ±1 that is linked oncewith a single strand from another component of L with framing n. We claim that we can separatethe unknotted component from the rest of the link, in which case the framing of the linked strandedchanges by ∓1. See figure 5.4 for the case of the unknot framed by −1, where the bolded curves arethe components of the link and the non-bolded curve is the longitude of the unknot determining itsframing. Note that the linking number of the vertical strand with the unknotted component is +1,so the framing of the vertical strand changes to n − 1 + 2 · 1 = n + 1. The framing of this stranddoes not change from the 2nd frame to the 3rd because the two R′1 moves performed cancel eachother out. The case where the unknot is framed by +1 is similar.
Example 5.3. Suppose now there is an unknotted component of L with framing ±1 that is linkedonce with two strands from other components of L. All the steps are shown in figure 5.5. We cansee that separating this unknotted component resulted in a full right twist in the two strands. Ifthe two strands belong to two different link components, then each of their framings will increaseby 1, and if they belong to the same component, the framing will increase by 2.
Example 5.4. The general picture of the previous two examples is that if we can find an unknottedcomponent of L with framing ±1 that is linked once with k strands, then we can separate the unknotfrom these strands by adding a full left/right twist in the strands, and changing their framingsaccordingly. This type of move (see figure 5.6) is called the Fenn-Rourke move. There is anothername for this operation due to its relation to the 4-manifold theory of Kirby calculus. If we usethe first Kirby move to introduce an unknotted, unlinked component with framing ±1, we say thatwe have performed a blow-up operation. Conversely, if we find an unknotted component withframing ±1 that links some strands once, then the operation of sliding the unknotted componentoff the strands and using K1 to discard it is called the blow-down operation.
Example 5.5. Suppose our link L can be written as L = ∪ni=0Li such that L0 is the unknot withframing 0 and links with only L1 once (the other Li’s are free to link with L1 in any way). We claimthat we can use K2 moves to change any crossing of some component Li (i ≥ 1) passing underL1 to an over crossing. By changing all such crossings to over crossings we would have completelyseparated L0 ∪ L1 from all of ∪ni=2Li, and we would have completely unknotted L1.
56

Figure 5.5: Separating an unknotted component from two strands
Figure 5.6: Separating an unknotted component from many strands
Suppose a strand of Li crosses underneath L1. We can isotopy L0 along L1 so that it is close tothis crossing (in a diagram we only need R1 and R2 moves). Sliding Li over L0 and then applyingR1 and R2 allows us to change this crossing to an over crossing (see figure 5.7). If i > 1, then theframing of Li does change from this Kirby move since L0 has framing 0 and Li is not not linkedwith L0. However, if i = 1, then the framing of L1 is changed to n1 + 2 lk(L0, L1), where n1 is theframing of L1.
Once all the crossings have been changed so that L0 ∪ L1 is separated from the rest of the linkand L1 is unknotted to become L′1, we are left to deal with a Hopf link L0∪L′1 with one componentframed by 0 and the other by some integer, say p. By sliding L′1 over L0 like we did above we seethat the framing of L′1 changes by ±2, so doing this repeatedly we can reduce this to the case whenthe Hopf link is framed by 0 and 1, or 0 and 0. Performing surgery on either of these links justgives S3, so we can remove them entirely. In the end, we have separated L0 ∪ L1 from the rest ofL and cancelled it.
Example 5.6. There is a simple way of expressing a surgery on the connected sum of two knotsk1#k2 and the surgery on each knot separately. Suppose k1 and k2 have framings p and q respec-tively, and are linked once by a 0-framed unknot k0. If we slide k1 over k2 to get k′1, then we seethat k0 now only links k2. So, applying the move in example 5.6 allows us to separate k0 ∪ k2 fromk′1 and cancel it. The knot that is left, k′1, is precisely k1#k2 with framing p + q. See ??. (todo:make this pic)
A graph embedded in the plane with vertices vi decorated by elements pi ∈ Q∪ ∞ induces asurgery diagram in the following way. Place an unknotted, unlinked circle ki at each vertex vi and
57

Figure 5.7: Changing under crossings to over via a 0-framed unknot
frame it by pi. If two vertices are connected by an edge, then link the corresponding circles once.If the graph is a tree, then there is a unique way to do this. These surgery tries provide a simplyway to express surgery diagrams that are composed of unknotted components linked together inthe simplest way.
We have seen that a surgery on any knot with framing ±1 results in an integral homology sphere.There is a particular homology sphere that is ubiquitous in low dimensional topology called thePoincare sphere. We will define it to be the space obtained by surgery on the left-hand trefoil withframing −1.
Example 5.7. We will show that the Poincare sphere is homeomorphic to performing surgery onthe E8 Dynkin diagram where each vertex is framed by −2. We blow down this diagram threetimes by adding 3 unknotted components with framings +1 and sliding them over the 3 ends of thediagram. Then we blow up 8 times to remove all components with framing −1. At this point wehave 3 components with framing 3, 2 and 5 linked to a component with framing 1. Blowing thisup we get two components with framing 2 and 4 linked to a component with framing 1. Blowingup again gives a component of framing 3 linked with a component of framing 1, and a final blow ofgives a single knot with framing 2. Performing a few R′1 moves gives the trefoil with framing −1.(todo: make pic)
5.3 The Rational Calculus
Now we will extend our moves on integral surgeries to rational surgeries. The first move wewill consider is called a Rolfsen twist. Recall that the lens spaces L(p, q) and L(p, q + np) arehomeomorphic for any integer n; that is, the surgeries on the unknot with rational coefficients p
q
and pnp+q are homeomorphic. We will describe how to explicitly visualize this homeomorphic, which
will then lead us to a new move on rational surgeries.Let H be the standardly embedded solid torus in S3 and T its boundary torus. We can construct
L(p, q) by a p/q surgery on the unknot in S3, which is equivalent to gluing two solid tori togethervia a map f : T → T that maps the meridian µ to the curve qµ + p`, where ` is the longitude. Ifτ : T → T is a right Dehn twist around µ, then each time the curve qµ+ p` intersects µ (which is ptimes) the curve τ(qµ+ p`) picks up another intersection with `, hence τ(qµ+ p`) = (q+ p)µ+ p`.Since τ extends to a homeomorphism of the solid torus H that T bounds we have that it alsoextends to a homeomorphism of H ∪f H and H ∪τf H by our gluing lemma (lemma 3.1). Thisshows explicitly that L(p, q) is homeomorphic to L(p, p + q). We can generalize this constructionby letting τ be an n-fold Dehn twist around µ (where it is a right twist if n > 0 and a left twist ifn < 0), in which case we get an explicit homeomorphism of L(p, np + q) with L(p, q). If r = p/q,then we can also rephrase this as the r surgery on the unknot is homeomorphic to the 1
n+ 1r
surgery
58

n
r = pq
n± 1
1±1+ 1
r
= p±p+q
Figure 5.8: The Rolfsen Twist
on the unknot for any n.We can now describe the Rolfsen twist. Suppose we have a rationally framed link in S3 such
that one component k is framed with an integer n and is linked once with an unknotted componentU which has any rational framing r = p/q. We claim that surgery on this link is equivalent tosurgery on the link formed by changing k’s framing to n± 1 and U ’s framing to p
±p+q = 1±1+ 1
r
. We
will show this by mimicking the above arguments to describe an explicit homeomorphism betweenthe spaces.
First we remove a tubular neighborhood νU of U from S3 to obtain the space X, and letf : ∂νU → ∂X be the gluing homeomorphism for the surgery on U ; that is, f maps the meridianof ∂νU to q times around the meridian and p times around the longitude of ∂X. Let τ be thehomeomorphism of X that cuts the space open along a disc D ⊂ X such that ∂D is the longitudeon ∂νU , performs a full right twist, then glues everything back, and is the identity outside a smallball containing D. Now glue U back into X via the map τ f . Then clearly this surgery is equivalentto the original surgery, except now U is framed by p
p+q and k is framed by n+ 1.It turns out that the Rolfsen twists are nearly enough to get between any rational surgery
diagrams for the same 3-manifold.
Theorem 5.3. If two 3-manifolds presented as a rational surgery diagram are orientation preserv-ingly diffeomorphic, then one diagram can be brought into the other via a finite sequence of Rolfsentwists and adding/removing a knot component with framing ∞.
Let us look at many examples using these rational calculus moves.
Example 5.8.
Proposition 5.5. We can convert any rational surgery diagram L for a 3-manifold into an integralsurgery diagram L′ for the same 3-manifold by adding unknotted components.
(todo: surgery diagram for L(p, q) in terms of continued fraction expansion of p/q)(todo: any rational surgery can be turned into an integral surgery)
59

6 4-Manifold Theory
6.1 Intersection Forms on 4-Manifolds
Let M be a closed, oriented, connected and simply connected 4-manifold, and let [M ] denote itsfundamental class. Since M is simply connected we have H1(M) = 0, hence H3(M) = 0 byPoincare duality. Further, the split exact sequence of the universal coefficient theorem says that
H2(M) = Ext(H1(M),Z)⊕Hom(H2(M),Z) = Hom(H2(M),Z)
Since Hom(A,B) is torsion free if B is free, we have that H2(M) is torsion free, and hence H2(M)is torsion free by Poincare duality. Define a bilinear form QM : H2(M)⊗H2(M)→ Z by
QM (α, β) = (α ` β, [M ])
This symmetric bilinear form is called the intersection form of M . This form is non-degenerate,which means that its matrix in any basis is non-singular, i.e. determinant = ±1.
There is a more geometric way of defining this bilinear form in terms of counting intersectionsof embedded surfaces. If M is a closed, smooth, oriented n-manifold, we say that a homologyclass a ∈ Hk(M) is represented by an oriented, smoothly embedded k-submanifold i : N → M ifi∗[N ] = a. Then we have the following
Lemma 6.1. Let M be a closed, oriented, smooth 4-manifold. Any homology class a ∈ H2(M) canbe represented by a smoothly embedded surface in M .
Proof. We will prove this for the case when M is simply connected, which is the case we needthe most for our later discussions. Since M is simply connected, the Hurewicz homomorphismh : π2(M) → H2(M) is an isomorphism. Recall that this map is defined by h([f ]) = f∗[S2], soevery homology class α ∈ H2(M) has a corresponding classifying map f : S2 → M such thatf∗[S2] = α. Since dimM = 4 we have that f can be slightly homotoped so that f is an immersionwith finitely many isolated double points. Locally, a double point looks like two planes in R4
intersecting at a point P . We can cut a small disc out of each plane around P and connect theplanes with a cylinder that misses P . Performing this operation on each double point of f(S2) weget a smoothly embedded surface in M representing α.
So, for a 4-manifold M and two homology classes a, b ∈ H2(M), let Fa, Fb ⊂ M be smoothlyembedded, oriented surfaces representing a and b respectively. We can slightly deform the embed-dings, if necessary, so that Fa and Fb intersect transversally in a finite collection of points. Assigna sign of ±1 to each intersection point p depending on whether or not the induced orientation onTpFa ⊕ TpFb from Fa and Fb agrees with TpM . We call the sum of these numbers the intersectionproduct of a and b, and denote it by a · b. Then
Proposition 6.1. QM (α, β) = PD(α) · PD(β)
If we fix a basis e1, . . . , ek of H2(M), then we call the matrix [QM ] = ei · ejij the matrix formof QM . It is clearly symmetric.
Example 6.1. Let M = S2×S2, then H2(M) is generated by a = S2×y0 and b = x0×S2 forsome base point (x0, y0) ∈M . We can slightly deform a to be completely disjoint from the originala, hence a · a = 0, and similarly b · b = 0. We cannot deform a so that it is disjoint from b, but
60

a and b clearly intersect transversally at one point, and by choosing orientations appropriately wehave a · b = 1. Therefore the matrix form of QM with respect to the basis a, b is
[QM ] =(
0 11 0
)Example 6.2. We will see soon that the intersection form on CP 2 is (1) and on CP 2 is (−1).More generally, the intersection form on the D2-bundle over S2 with Euler number n is just (n).
Example 6.3. An easy application of the Mayer-Vietoris sequence shows that H2(M#N) ∼=H2(M)⊕H2(N), and so QM#N = QM ⊕QN .
If M is a compact, oriented, connected and simply connected 4-manifold with boundary, thenH2(M) and H2(M,∂M) are still torsion free, and so Poincare-Lefschetz duality gives us a non-degenerate pairing QM : H2(M) ⊗H2(M,∂M) → Z defined by QM (α, β) = (α ` β, [M,∂M ]). If∂M is an integral homology sphere, then H2(M,∂M) = H2(M), and so QM is a symmetric, non-degenerate pairing of H2(M) with itself. In terms of intersections of surfaces, we can still define theintersection product · : H2(M) ⊗H2(M) → Z in the usual way, and if M is an integral homologysphere we still have QM (α, β) = PD(α) ·PD(β). There is a converse to the non-degeneracy of QM .
Proposition 6.2. The intersection form QM on a compact, oriented, connected and simply con-nected 4-manifold M with boundary is non-degenerate if and only if ∂M is an integral homologysphere.
Proof. If ∂M is a disjoint union of integral homology spheres, then we have already seen that QMis non-degenerate by Poincare-Lefschetz duality.
Suppose QM is non-degenerate. Since M is simply connected we have H1(M) = 0 by theuniversal coefficient theorem, hence H3(M,∂M) = 0 by Poincare-Lefschetz duality. A part of thelong exact sequence of the pair (M,∂M) looks like
0 −→ H2(∂M) i∗−→ H2(M)j∗−→ H2(M,∂M) −→ H1(∂M) −→ 0
So we have i∗ is injective, hence im i∗ = 0 if and only if H2(∂M) = 0. If im i∗ were not trivial, thenfor any a ∈ im i∗ and b ∈ H2(M) we have a · b = 0 since we can move any surface representing b sothat it does not intersect the boundary at all. But, QM is assume to be non-degenerate, so we donot allow this to happen, hence im i∗ = 0, and so H2(∂M) = 0. Finally, this implies H1(∂M) = 0,therefore ∂M is an integral homology sphere.
Intersection forms are very important in 4-dimensional topology. In fact, they nearly classify allsimply connected 4-manifolds by a theorem of Freedman. So, it will be useful to recall some basicfacts of non-degenerate, symmetric, bilinear forms Q : Zn × Zn → Z. We say that two such formsQ1, Q2 are isomorphic if there is an isomorphism ϕ : Zn → Zn such that Q1(x, y) = Q2(ϕ(x), ϕ(y)).The rank of Q is defined to be n. If we think of Q as a bilinear form over R, then we can diagonalizeover the reals and there will be b+ positive values and b− negative values on the diagonal. Thesenumbers are invariants of the isomorphism type of Q, as is the signature signQ = b+− b−. We callQ a definite form if b− = 0 or b+ = 0, and call Q an indefinite form otherwise. We say that Q iseven if Q(x, x) = 0 mod 2 for all x, and otherwise we say Q is odd.
There is a nice relationship between surgeries on links and intersection forms on cobordismsof surgeries. First we will consider a fourth way of defining the linking number of two disjoint,oriented knots (see the other three definitions in section 2.1). For disjoint, oriented knots ki and kj
61

in S3, let Fi and Fj be Seifert surfaces with their induced orientations. We can push the interiorsof these surfaces into the 4-ball D4 that bounds S3 so that Fi ∩ S3 = ki and Fj ∩ S3 = kj . Then,perturbing Fi and Fj slightly so that they intersect transversely if necessary, one can compute thatlk(ki, kj) = Fi · Fj .
Let X be a 4-dimensional 2-handlebody; that is, a 4-manifold that can be decomposed as 0-handle ∪ 2-handles ∪ 4-handle. This is equivalent to specifying a link L = k1 ∪ · · · ∪ kn in ∂D4
with ki framed by an integer pi. For each component ki, let Fi denote a surface of ki embeddedin ∂D4 = S3, then we can push this surface a little bit into D4 to obtain a surface Fi such thatFi ∩ S3 = ∂Fi = ki. Let Gi be the core disc of hi, then by gluing Fi and Gi together along ki weobtain a closed, oriented, smoothly embedded surface αi in X. Put any orientation on ki, then weget induced orientations on Fi and Gi, hence αi also gets an induced orientation.
Proposition 6.3. The surfaces α1, . . . , αn form a basis for H2(X).
Proof. First consider the space obtained from attaching one 2-handle Y = D4∪ϕ (D2×D2). Let Nbe a small open neighborhood of ϕ(∂D2×D2), and let U = D4∪N and V = (D2×D2)∪N . ThenU is homotopy equivalent to D4, V is homotopy equivalent to D2 ×D2, and U ∩ V is homotopyequivalent to S1 ×D2. The Mayer-Vietoris sequence gives the following exact sequence.
H2(U)⊕H2(V ) −→ H2(Y ) ∆−→ H1(U ∩ V ) −→ H1(U ⊕ V )
which implies that the connecting homomorphism ∆ : H2(Y ) → H1(U ∩ V ) is an isomorphism,where clearly H1(U∩V ) ∼= Z. To understand the generator of H2(Y ) let us recall how the connectinghomomorphism is defined. A cycle c ∈ Z2(Y ) can be expressed as c = u + v with u ∈ C2(U) andv ∈ C2(V ). This implies ∂u = −∂v, hence ∂u ∈ Z1(U ∩ V ), and so we define ∆[c] = [∂u].
The attaching sphere knot k of the 2-handle is the generator of H1(U ∩ V ), so we need todetermine what element α of H2(Y ) gets mapped to k. By our description of ∆ we see that α canbe represented by a 2-chain in U and a 2-chain in V whose boundaries are k. Therefore we cantake these chains to be the Seifert surface of k pushed into D4 and the core disc of the 2-handleD2 ×D2, and so α is can be represented by gluing these surfaces together.
Repeating this argument for each 2-handle in X we get a set of n generators of H2(X), whichwe know to be of rank n from its handlebody homology, therefore these generators form a basis.
We call the basis α, . . . , αn the canonical basis of H2(X). Let us compute the matrix of theintersection form with respect to this canonical basis. First we compute the self intersection numberαi · αi. Translate the core disc Gi to a parallel disc G′i in the boundary D2 × ∂D2. This new discwill intersect the boundary of D4 at a longitude of ki, call it k′i, with linking number lk(ki, k′i) = pi.Isotope the Seifert surface Fi to a new surface F ′i such that ∂F ′i = k′i, and then push this surfaceinto D4 to obtain F ′i such that F ′i ∩ S3 = ∂F ′i = k′i and so that Fi and F ′i intersect transversally.By gluing F ′i to G′i we obtain a closed surface α′i that represents the same homology class as α, andclearly
αi · α′i = (Fi ∪Gi) · (F ′i ∪G′i) = Fi · F ′i = lk(ki, k′i) = pi
Repeating this argument for two different components ki and kj , shows that αi · αj = lk(ki, kj).So, we have proved the following.
Proposition 6.4. The intersection form of a 2-handlebody in the canonical basis is equal to thelinking matrix of the associated link.
62

D4
D2 ×D2
Figure 6.1: Surgery Cobordism
Let M = ∂X, i.e. M is the result of performing the surgery on the link L in S3. We saw incorollary 5.1 that H1(M) could be computed as Zn/ im[L], where [L] is the linking matrix of L. Asa corollary we now have
Corollary 6.1. Let X be a 2-handlebody with intersection form QX . Then H1(∂X) is finite if andonly detQX 6= 0, in which case |H1(∂X)| = | detQX |.
6.2 Kirby Calculus Reinterpreted
Kirby calculus is essentially a 4-dimensional technique, and so we take another look at the Kirbymoves. To bring Kirby calculus into the 4-dimensional world we show that surgeries on manifoldsinduce cobordisms. Recall that two compact, oriented, smooth n-manifolds M1 and M2 are saidto be cobordant if there is a compact, oriented, smooth (n + 1)-manifold W such that ∂W =−M1tM2, where −M1 is M1 with the opposite orientation. A manifold M is said to be cobordantto zero if it is cobordant to the empty manifold, i.e. ∂W = M .
Proposition 6.5. The manifold resulting from any surgery on any knot in S3 is cobordant to zero.
Proof. Let k be a knot in S3 with tubular neighborhood N(k), and let ϕ : ∂(S1×D2)→ ∂(M\N(k))be the attaching map that determines the surgery on k. Let c be the image of any meridian ∗×∂D2
under ϕ so that c is a curve in ∂N(k). There is a diffeomorphism φ : ∂D2 ×D2 → N(k) such thatφ(∂D2 × 0) = k and φ(∂D2 × ∗) = c, where ∗ is some point on the boundary of the 2-disc.Let W be the manifold resulting from attaching the 2-handle D2 × D2 to the the 4-ball D4 viaφ : ∂D2 ×D2 → N(k) ⊂ ∂D4.
The boundary of the 4-ball has changed by attaching this 2-handle. The part of the boundaryof D4 outside of N(k) (which is the knot complement) have remained boundary points, and all thepoints in N(k) have now become interior points of M . The “free” part D2×∂D2 of the boundary ofthe 2-handle have now become boundary points of M (see figure 6.1). This means we have removeda solid torus from M and glued in another solid torus. In fact, the solid torus was glued in by adiffeomorphism that maps the meridian ∂D2 × ∗ to the curve c, hence this is just performingthe surgery on k determined by ϕ. Therefore we have constructed a cobordism from the surgeredmanifold to the empty manifold, and so it is cobordant to zero.
Corollary 6.2. Every closed, oriented 3-manifold is cobordant to zero.
63

M
[0, 1]N(k)
D2 ×D2
Figure 6.2: Surgery Cobordism
Proof. By proposition 6.5 we have that every surgery on S3 is cobordant to zero. But, by theo-rem 5.1 every closed, oriented 3-manifold is a surgery on S3, hence every such manifold is cobordantto zero.
Example 6.4. We saw earlier that D2-bundles over S2 are canonically parameterized by Z byattaching a 4-dimensional 2-handle along an unknotted circle in ∂D4. Let En denote this 4-manifoldwith boundary, and since ∂En is the result of performing a surgery on the unknot with framing n,we see that ∂En = L(n, 1). In particular E0 is the trivial bundle S2 ×D2. We also saw that CP 2
is a union of a 0, 2 and 4-handle, and the 2-handle is attached to the 0-handle along an unknottedcircle. So, which of the 4-manifolds En corresponds to CP 2\D4, i.e. CP 2 without its 4-handle? InCP 2 the 2-handle D2×D2 is attached to D4 = D2×D2 via the map ϕ : ∂D2×D2 → ∂(D2×D2)defined by ϕ(z, w) = (z, zw). By fixing a z and restricting |w| = 1 we see that a longitude ofS1×D2 is wrapped once around the meridian and once around the longitude of S1×D2. So, whenwe attach this handle the boundary changes by performing a surgery on the unknot with framing+1, hence CP 2\D4 is diffeomorphic to E1. We also have E−1 is diffeomorphic to CP 2\D4.
A slight generalization of the construction in proposition 6.5 gives an explicit cobordism betweenany manifold and any surgery on that manifold.
Corollary 6.3. Any integral surgery on any 3-manifold M is cobordant to M .
Proof. Mimic the construction in proposition 6.5 by attaching a 2-handle to the component M×1of the 4-manifold M × I. After the handle is attached one component will be M and the othercomponent will be the result of the sugery (see figure 6.2).
For a framed link L, let WL denote the 4-dimensional cobordism of the surgery on L withzero, i.e. WL = 0-handle ∪ a 2-handle for each component of L. This association of a 4-manifoldwith boundary to any framed link is what allows us to recast Kirby calculus as a 4-dimensionaltheory. In fact, this is the way Kirby calculus was originally described. The first Kirby moveadded an unknotted, unlinked component to L with framing ±1 to get the link L′. On the levelof 4-manifolds this amounts to WL′ being diffeomorphic to WL#CP 2 or WL#CP 2, depending onthe framing of the added unknot. This follows from example 6.4 where we saw that E1 = CP 2\D4
and E−1 = CP 2\D4.
64

Next, we claim that performing the second Kirby move on two components of L is equivalentto sliding one handle correspond to one component across the handle corresponding to the othercomponent. Since this whole operation is technically taking place in a 4-dimensional manifold itis difficult to picture it. Figures 3.9 and 3.10 showed how to slide 3-dimensional 2-handles overeach other, and the idea in 4-dimensions is similar. Let us attach two 2-handles h1, h2 to the 4-ballD4 with attaching circles k1, k2 and framings n1, n2 and let X = D4 ∪ h1 ∪ h2. To slide h1 overh2 we need to find a disc parallel to the core of h2 and then isotope the attaching circle of h1
through this disc. We can take any disc parallel to the core, say D2 × p where p 6= 0. Theboundary of this disc is precisely where it intersects the 3-sphere, which is at a longitude k′2 of k2
such that lk(k2, k′2) = n2, i.e. its a longitude determined by the framing. As we saw in figure 3.10,
isotoping the attaching circle of h1 through this disc is the same as form the banded sum of theattaching circle with the boundary of the disc, so the attaching circle of h1 after sliding across h2
is the connect sum of k1 with k2 along some band disjoint from k1 and k2. We could compute theframing of this handle after the slide directly, or appeal to proposition 6.4. Namely, let α1, α2 be thecanonical basis of H2(X), then after a handle slide this canonical basis has changed to α1 +α2, α2.The framing on h1 after the slide is
(α1 + α2) · (α1 + α2) = α1 · α1 + α2 · α2 + 2α1 · α2 = n1 + n2 + 2 lk(k1, k2)
In example 5.5 we saw how an unknotted component with framing 0 that links one other strandexact once allows us to separate and cancel those two components from the rest of the link. Whatreally happened is that we were able to separate the 0-framed unknot and the linked componentfrom the rest of the link, and then we could completely unknot that linked component so that wewere left with a Hopf link with one component framed by 0 and the other framed by some integern. By repeatedly sliding handles we arrived at a Hopf link framed by 0 and 0, or 0 and 1 dependingon the parity of n. The 4-manifolds corresponding to these framed Hopf links are S2 × S2 andS2×S2 respectively. So, example 5.5 has the following two immediate corollaries.
Corollary 6.4. Let M be a 4-dimensional handlebody and let k0, k1 be attaching circles of two 2-handles such that k1 lies entirely in ∂D4 and k0 is a 0-framed meridian of k1. Finally, let N be thehandlebody with all the handles of M except for k1 and k2. Then M is diffeomorphic to N#S2×S2
if the framing coefficient of k1 is even, and otherwise M is diffeomorphic to N#S2×S2.
Corollary 6.5. If M is a 2-handlebody with odd intersection form, then M#S2×S2 is diffeomor-phic to M#S2×S2.
Proof. Since QM is odd we must have that any matrix representation of QM has an odd number ofthe diagonal. In particular, if we take the matrix representation with respect to the canonical basisof H2(M) we see that some 2-handle has odd framing, so let k denote the attaching circle for thishandle. Form M#S2 × S2 by adding a Hopf link `1 ∪ `2, both framed as 0, and slide `1 over k toobtain `′1. Then `′1 has odd framing and is linked once by `2, so we can separate them from the restof the link, and reduce it until it is a Hopf link framed by 0 and 1, hence we have M#S2×S2.
65

7 Morse Homology
7.1 The Morse-Smale Condition and Moduli Spaces of Flow Lines
Let f : X → R be a Morse function on a closed, Riemannian n-dimensional manifold (X, g)with the Levi-Civita connection ∇. The metric g and connection ∇ will be used for backgroundcomputations, and is not really significant. The set of critical points of f of index i will be denotedby criti(f), and we set crit(f) = ∪i criti(f). Recall that at a critical point p ∈ crit(f), the tangentspace TpX splits as a direct sum E−TpX⊕E+TpX, where E−TpX and E+TpX denote the negativeand positive eigenspaces of the Hessian Hf at p and dimE−TpX = µ(p). A negative gradient flowline is a curve u : R → X such that du/dt = −∇gf u. Since X is compact, −∇gf generates a1-parameter group of diffeomorphisms ϕt : X → X, i.e ϕt is a diffeomorphism for all t ∈ R suchthat ϕs+t = ϕs ϕt, ϕ0 = id and for fixed point p ∈ X we have
dϕt(p)dt
= −∇gf(ϕt(p))
For a critical point p ∈ crit(p) we define the ascending and descending manifolds to be
A (p) =x ∈ X : lim
t→∞ϕt(x) = p
D(p) =
x ∈ X : lim
t→−∞ϕt(x) = p
These sets consist of points that flow to critical points in forward or backward time respectively.The ascending manifold is sometimes called the stable manifold and the descending manifold issometimes called the unstable manifold. A study of the dynamics of the negative gradient flowallows one to prove the following important statement.
Proposition 7.1. If p ∈ criti(f), then D(p) and A (p) are smoothly embedded discs of dimensioni and n− i respectively. Further, TpD(p) = E−TpX and TpA (p) = E+TpX.
We will not prove this because it is not useful in our route to defining Morse homology. A pair(f, g) is said to be Morse-Smale if f is a Morse function such that for every pair of critical pointsp, q ∈ crit(f) the ascending and descending manifolds intersect transversely D(p) t A (q). Sincecodimension is additive under transverse intersections we have dim D(p)∩A (q) = µ(p)−µ(q). Wedo not yet know such pairs even exist (they do, in fact, in abundance), but we immediately get thefollowing lemma.
Lemma 7.1. If (f, g) is a Morse-Smale pair on X, then a non-constant flow line of −∇gf from pto q has µ(p) > µ(q).
Proof. Since (f, g) is Morse-Smale we have D(p)∩A (q) is a manifold of dimension µ(p)− µ(q). Ifµ(p) < µ(q), then this manifold is empty, hence there are no flow lines from p to q. If p = q, thenthis is a 0-dimensional manifold whose points correspond to constant flow lines. Therefore if thereis a non-constant flow line from p to q we must have µ(p) > µ(q).
Example 7.1. If we stand the torus T 2 vertically with the induced metric from its embedding inR2, and let f : T 2 → R be the height function, then f does not satisfy the Morse-Smale condition.If we let p, q, r, s denote the critical points of f such that f(p) > f(q) > f(r) > f(s), then wecan see that D(q) does not intersect A (r) transversely. Unfortunately this type of failure of the
66

Morse-Smale condition is common for “obvious” choices of Morse functions, which tend to havemany symmetries. We can perturb f a little so that it satisfies the Morse-Smale condition (forexample, slightly tilt T 2 off its vertical axis), but sometimes it is better to consider a more relaxedrequirement than Morse-Smale, such as the Morse-Bott condition.
Example 7.2. Consider the flat torus T 2 = R2/Z2 with the smooth function f : T 2 → R definedby f(x, y) = cos(2πx)+cos(2πy). This function is clearly well defined, and the critical points are atthe equivalence classes of (0, 0), (1/2, 0), (0, 1/2), (1/2, 1/2) ∈ R2. It is easy to compute the Hessianat these critical points and see that they are non-degenerate, so f is a Morse function. It is alsoeasy to see that all the ascending and descending manifolds intersect transversally, so f satisfiesthe Morse-Smale condition.
There is another way of discussing the Morse-Smale condition that is better suited for infinitedimensional generalizations of Morse homology. For two critical points p, q ∈ crit(f), let Mf (p, q)be the moduli space of flow lines from p to q, i.e.
Mf (p, q) =u : R→ X :
du
dt= −∇gf(u(t)), u(−∞) = p, u(∞) = q
We will show how to put a topology on this set momentarily. This set carries a free R action givenby pre-composition with translation: (s · u)(t) = u(t + s). Let Mf (p, q) denote the quotient ofMf (p, q) by this action, which we call the moduli space of unparameterized gradient flow lines.There is an obvious isomorphism between D(p) ∩A (q) and Mf (p, q) as sets since any flow line isuniquely determined by its initial condition, so we would like to know that Mf (p, q) is actually amanifold.
To pursue this we need to develop significant functional analysis machinery. Let Cp,q be thesubset of W 1,2
loc (R, X) such that if u ∈ Cp,q, then
1. u(−∞) = p and u(∞) = q
2. There is an R < 0 sufficiently negative such that u(−∞, R] is contained in a coordinate chartaround p and u|(−∞,R] ∈W 1,2((−∞, R], X).
3. There is an R > 0 sufficiently positive such that u[R,∞) is contained in a coordinate chartaround p and u|[R,∞) ∈W 1,2([R,∞), X).
Then Cp,q is a Banach manifold modeled on W 1,2(R,Rn). Let πE : E → Cp,q be the Banach bundleover Cp,q defined by
E =⋃
u∈Cp,q
u × L2(u∗TX)
The pullback bundle u∗TX makes sense because the Sobolev embedding W 1,2 → C0 ensures thatu is continuous, so E is a Banach bundle with characteristic fiber L2(R,Rn). For any metric g onX we can define a section F : Cp,q → E by
F (u) = (u, u′ +∇gf u)
where u′ is the weak derivative of u. Technically F depends on the Morse function f , metric g andthe points p, q, but we omit this from the notation. If we let 0E denote the zero section of E → Cp,q,then we have the following:
Proposition 7.2. F−1(0E) =Mf (p, q)
67

Proof. If u ∈ F−1(0E), then u′ = −∇gf u. Since ∇gf and u are continuous, we have u′ iscontinuous, hence u′ is equal to the regular derivative du/dt. Therefore u is C1 and so is anintegral curve from p to q, i.e. u ∈Mf (p, q). On the other hand, if u ∈Mf (p, q), then u convergesexponentially to the critical points p and q, so u ∈W 1,2(R, X) and hence u ∈ F−1(0E).
By applying the standard bootstrapping argument we see that u is actually as smooth as g(assuming f is smooth), hence u is actually Ck.
In this context we say that (f, g) is a Morse-Smale pair if F t 0E , which of course implies thatMf (p, q) is a submanifold of the Banach manifold Cp,q. If we could show that dF is Fredholmat the points in F−1(0E), then we would have that F−1(0E) = Mf (p, q) is a finite dimensionalsubmanifold of Cp,q. If we work a little harder we can actually generalize the above constructions alittle to show something stronger. Let Ak denote the Banach manifold consisting of Ck-metrics onX. Note that this is just a convex subset of the Banach space (i.e. linear space) of Ck sections ofS2T ∗X → X. Let πeE : E → Ak × Cp,q be the Banach bundle that is the pullback of E → Cp,q alongthe projection Ak × Cp,q → Cp,q. In particular, E can be written as
E =⋃
(g,u)∈Ak×Cp,q
(g, u) × L2(u∗TX)
So, the characteristic fiber of E is L2(R,Rn). We define a section F : Ak × Cp,q → E of this bundleby F (g, u) = (g, u, u′+∇gf u). This section depends only on f , but we do not include this in thenotation. Then the most important proposition we want to prove is the following.
Proposition 7.3. The section F is transverse to the zero section: F t 0eE . Further, if π : Ak ×Cp,q → Ak is the projection onto the second factor, then the restriction of π to π : F−1(0eE)→ Ak isFredholm of index µ(p)−µ(q), i.e. dπ(g,u) is Fredholm of index µ(p)−µ(q) at each (g, u) ∈ F−1(0eE).
The immediate corollary of the this proposition is that a generic g ∈ Ak is a regular value ofthe restricted map π, hence π−1(g) is a finite dimensional submanifold of dimension µ(p) − µ(q).Clearly π−1(g) =Mf (p, q), where this moduli space is taken with respect to g, therefore we havethe following.
Corollary 7.1. The moduli space of flow lines Mf (p, q) from p to q for a Morse-Smale pair isa (µ(p) − µ(q))-dimensional submanifold of Cp,q. The moduli space of unparameterized flow linesMf (p, q) is a (µ(p)− µ(q)− 1)-dimensional manifold.
Proposition 7.3 will actually follow reasonably easily from the fact about the vertical differentialDFu of the section constructed for the first Banach bundle E → Cp,q is Fredholm.
Proposition 7.4. For each u ∈ F−1(0E), the vertical differential DFu : TuCp,q → Eu is Fredholmof index µ(p)− µ(q).
So, now we will work to prove proposition 7.4. The first thing we can do is introduce coordinateson our manifolds and bundles so that we can write the vertical differential in a nicer way. Toput coordinates on Cp,q fix u ∈ Cp,q and a small open set U around u. Let N(TX) be a smallenough convex, tubular neighborhood of the zero section of TX so that the exponential map exp :N(TX)→ X is defined, where this is the exponential map with respect to the background metricg and Levi-Civita connection ∇ floating around. This exponential map induces coordinates on Cp,qin the following way. Let u ∈ Cp,q and take another curve v ∈ Cp,q close to u. Then there is a unique
68

πE
φ
ϕ
uU ⊆ Cp,q
0φ(U) ⊆W 1,2(u∗TX)
φ(U)× L2(u∗TX)E|U
Figure 7.1: Trivializing E → Cp,q
section φ(v) ∈ W 1,2(u∗TX) (i.e. a W 1,2 vector field along u) such that v(t) = exp(u(t), φ(v)(t)).So, for a small neighborhood U around u we have a chart φ : U → W 1,2(u∗TX) = TuCp,q withφ(u) = 0.
Next we trivialize πE : E → Cp,q over U . For v ∈ U we can define the bundle map P vu :u∗TX → v∗TX that parallel transports a vector Vt in the fiber of u∗TX over t along the geodesics 7→ (u(t), sφ(v)(t)) to a vector in the fiber of v∗TX over t. This map allows us to identify asection in L2(u∗TX) with a section in L2(v∗TX), which are precisely the fibers of E over u andv. Now that we have coordinates on (φ,U) around u in Cp,q and a trivialization of E|U (and hencecoordinates on E|U ), we can write the coordinate representation F : φ(U)→ φ(U)× L2(u∗TX) ofthe section F as
F (ξ) =(ξ, (P vu )−1
(exp(u, ξ)′ +∇gf exp(u, ξ)
))Computing the vertical differential DFu : φ(U)→ L2(u∗TX) in these coordinates gives
DFu(ξ)(t) =d
ds
∣∣∣∣s=0
F (sξ(t))
=d
ds
∣∣∣∣s=0
((P vu )−1
(exp(u(t), sξ(t))′ +∇gf(exp(u(t), sξ(t))
))= ∇ξ(t)
(u′(t) +∇gf(u(t))
)= ∇ξ(t)u′(t) + ∇ξ(t) (∇gf(u(t)))
where the second from last line follows from the fact that any connection can be recovered from par-allel translations along its geodesics. Also, since the connection is torsion free we have ∇ξ(t)u′(t) =∇u′(t)ξ(t), so
DFu(ξ) = ∇u′ξ + ∇ξ (∇gf(u))
If we trivialize u∗TX using parallel translation with respect to ∇, then vertical differential DFu :W 1,2(R,Rn)→ L2(R,Rn) can be written as
(DFuξ)(t) =d
ds
∣∣∣∣s=t
ξ(s)−Atξ(t)
where A ∈ Ck(R,End(Rn)) is defined by At(V ) = −∇V (∇gf(u(t))). By (4.4) we have
A−∞ = −Hf (p) A∞ = −Hf (q)
69

With this set up we will see that proposition 7.4 follows from a more general proposition concerningspectral flows (see [4]). Before stating this proposition we recall the definition of spectral flow, atleast for the special case we need. Let A ∈ Cb(R,End(Rn)) be a bounded path of operators on Rn
such that A±∞ are symmetric and do not have zero as an eigenvalue. Then we define the spectralflow of the path A to be the number of eigenvalues of As that change from negative to positive ass ranges from −∞ to ∞. We denote this integer by SF(A), and clearly in this special case we have
SF(A) = dimE+(A∞)− dimE+(A−∞)
Proposition 7.5. Let A ∈ Cb(R,End(Rn)) such that A−∞ and A∞ are symmetric and do not havezero as an eigenvalue. Then the operator DA : W 1,2(R,Rn)→ L2(R,Rn) given by
DAξ =d
dtξ −Aξ
is Fredholm withindDA = −SF(A)
Proof.
Applying proposition 7.5 to the vertical differential DFu = d/dt − As we see that DFu isFredholm of index
indDFu = −SF(A)= −(dimE+(−Hf (q))− dimE+(−Hf (p)))= dimE−(Hf (p))− dimE−(Hf (q))= µ(p)− µ(q)
and this finishes the proof proposition 7.4. Let us see how to use proposition 7.4 to prove proposi-tion 7.3.
Proof of proposition 7.3. Our derivation of the local expression of the vertical differential DFu atu ∈ F−1(0E) can be slightly adapted to give the following local expression for the vertical differentialDF(g,u) : T(g,u)(Ak × Cp,q)→ T(g,u,0)E at a point (g, u) ∈ F−1(0eE):
DFu(η, ξ) = DFu(ξ) + ∂η(∇gf(u))
where ∂η denotes the derivative with respect to the η variable (remember that Ak is just a convex,open subset of a linear space).
Let (g, u) ∈ F−1(0eE) and consider the differential dπ(g,u) : T(g,u)F−1(0eE)→ TgAk of the restric-
tion of π to F−1(0eE). We claim that the kernel of dπ(g,u) is isomorphic to the kernel of DFu. Wehave that
T(g,u)F−1(0eE) = (DF(g,u))
−1(T(g,u)0eE)which can be written as
T(g,u)F−1(0eE) =
(η, ξ) ∈ TgAk ⊕ TuCp,q : DFu(ξ) + ∂η(∇gf(u)) = 0
(7.1)
using our coordinates. We clearly have dπ(g,u)(η, ξ) = η, hence
ker dπ(g,u) =
(0, ξ) ∈ TgAk ⊕ TuCp,q : DFu(ξ) = 0
= kerDFu
70

Next we claim that the cokernel of dπ(g,u) is isomorphic to the cokernel of DFu. (todo: do this).Finally, we show that the image of dπ(g,u) is closed. Using our coordinates and (7.1), the image
of dπ(g,u) can be written as
dπ(g,u)
(T(g,u)F
−1(0eE))
=η ∈ TgAk : DFu(ξ) + ∂η(∇gf(u)) = 0 for some ξ ∈ TuCp,q
=η ∈ TgAk : ∂η(∇gf(u)) ∈ imDFu
So, we see that im dπ(g,u) is the pre-image of imDFu under the map η 7→ ∂η(∇gf(u)). This map iscontinuous, and DFu is closed since it is Fredholm, therefore im dπ(g,u) is closed.
Proposition 7.6. A generic Ck function f : X → R (k ≥ 2) is Morse.
Proof. We clearly want to use the Sard-Smale theorem somehow, and in fact we will use theo-rem E.3. In order to use this we need to formulate a Banach bundle such that the zero section cor-responds to what we want. In particular, let π : F → Ck(X)×X be the Banach bundles that is thepullback of the cotangent bundle T ∗X → X along the projection Ck(X)×X → X so that the fiberof F over (f, p) is just T ∗xX. Consider the section s : Ck(X)×X → F given by s(f, p) = dfp ∈ T ∗pX.Let (f, x) ∈ π−1(0F ) and let us compute the vertical differential Ds(f,x) : T(f,x)(Ck(X)×X)→ T ∗xX
at (f, x). Note that since Ck(X) is a linear space we have TfCk(X) is naturally isomorphic toCk(X), so we describe how Ds(f,x) acts on a pair (h, V ) ∈ Ck(X)× TxX.
Ds(f,p)(h, V ) = dh(X) +∇V (df)
UNFINISHED
7.2 The Compactness and Gluing Theorems
The space of unparameterized flow lines Mf (p, q) is not always compact; for example, in figure 7.2we see a sequence of flow lines (the thin curves) on the deformed sphere that converge to a “broken”curve (the bolded curve). A broken flow line from p to q is a sequence of critical points r1 =p, r2, . . . , rk−1, rk = q ∈ crit(f) and curves γ1, . . . , γk−1 in X such that γi is a flow line from rito ri+1. However, there is a canonical compactification of Mf (p, q) to a manifold with cornersby adding “broken” flow lines. There are two parts to this compactification process. The firstpart (called the compactness result) consists of identifying how a sequence can fail to converge inMf (p, q), trying to get a reasonable object out of a diverging sequence, and then adding thesepoints to Mf (p, q) to get a compact space. The second part (called the gluing result) consistsof showing that a broken flow line can be slightly perturbed to an honest flow line so that ourcompactification is a manifold with corners.
Recall that a second countable, Hausdorff space X is said to be a smooth n-manifold withcorners if every point x ∈ X has an open neighborhood Uα and homeomorphism ϕα : Uα →Rn−k × [0,∞)k (for some 0 ≤ k ≤ n) such that the transition functions ϕβ ϕ−1
α are smooth. For0 ≤ k ≤ n, we define the codimension k stratum of X to be the set Xk of points x ∈ X with achart ϕ : U → Rn−k × [0,∞)k such that at least one of the last k coordinates of ϕ(x) is zero. Notethat X0 is just the interior of X, and if X2 = X3 = · · · = Xn = ∅, then X is just a manifold withboundary and X1 = ∂X. So we will use the notation ∂X to denote X1 even when the higher strataare non-empty.
Now we look at what it means for a sequence in Mf (p, q) to converge, and how this convergencecan fail. In Mf (p, q), a sequence of elements converges if it converges in the subspace topology
71

Figure 7.2: Flow lines converging to a broken flow line
induced by the Banach manifold Cp,q. Since modding out by the R action identifies flow lines thatdiffer by only a translation we have that a sequence (un) of unparameterized flow lines in Mf (p, q)converge to a flow line u if for any sequence of lifts (un) of (un) and lift u of u there is a sequence(sn) of real numbers such that sn · un converges to u in Mf (p, q).
(todo: finish compactifications and gluing)– – – – – – – – –The BIG theorem:
Theorem 7.1. If X is a closed n-manifold and (f, g) is a Morse-Smale pair, then for any twocritical points p, q, the manifold Mf (p, q) has a natural compactification to a smooth manifold with
corners Mf (p, q) whose codimension k stratum is
Mf (p, q)k =⋃
r1, . . . , rk ∈ crit(f)p, r1, . . . , rk, q distinct
Mf (p, r1)× Mf (r1, r2)× · · · Mf (rk−1, rk)× Mf (rk, q)
In particular, if k = 1, then as oriented manifolds we have
∂Mf (p, q) =⋃
r ∈ crit(f)p, r, q distinct
(−1)µ(p)+µ(r)+1Mf (p, r)× Mf (r, q)
The two most important special cases of this theorem are when µ(q) = µ(p)− 1, in which caseMf (p, q) is a compact 0-manifold (hence a finite collection of points), and when µ(q) = µ(p) − 2,
in which case Mf (p, q) has a compactification to a 1-manifold with boundary Mf (p, q) such that
∂Mf (p, q) consists of just once broken flow lines:
∂Mf (p, q) =⋃
r∈critµ(p)−1(f)
Mf (p, r)× Mf (r, q)
72

7.3 The Morse Complex
We can now define the Morse complex1 associated to a Morse-Smale pair (f, g). Let CMi(f, g)be the Z/2 vector space generated by the critical points of index i
CMi(f, g) :=⊕
p∈criti(f)
Z/2 〈p〉
We can define this complex with Z coefficients if we work harder and define orientations on themoduli spaces Mf (p, q). It is simpler to work with Z/2 coefficients for now, and we will discussorientation issues later. The differential ∂ : CMi(X)→ CMi−1(X) counts the number of flow linesbetween critical points. Specifically, if p ∈ criti(f), then
∂(p) =∑
q∈criti−1(f)
#Mf (p, q) · q
and extend linearly to CMi(f). The count #Mf (p, q) is of course done modulo 2 (at least untilwe can define orientations).
Proposition 7.7. ∂ ∂ = 0
Proof. First recall that the number of points in the boundary of a 1-manifold is zero when countedmodulo 2. For p ∈ criti(f) we can easily compute
∂ ∂(p) = ∂
∑r∈criti−1(f)
#Mf (p, r) · r
=∑
r∈criti−1(f)
#Mf (p, r) · ∂(r)
=∑
q∈criti−2(f)
∑r∈criti−1(f)
#Mf (p, r) ·#Mf (r, q)
· qSo, the coefficient of q ∈ criti−2(f) in ∂ ∂(p) is precisely #∂Mf (p, q), which is zero since it is acompact 1-dimensional manifold.
We define the Morse homology HM∗(f, g) of the pair (f, g) to be the homology of the chaincomplex (CM∗(f, g), ∂).
7.4 A Natural Isomorphism between Morse and Singular Homology
We would like to show that the homology groups do not depend on our choice of Morse functionor metric. There are many ways of doing this, but the first way we will consider is to showthat HM∗(f, g) is naturally isomorphic to some other known homology theory, such as singularhomology, which of course implies that HM∗(f, g) does not depend on f or g.
The homology theory we will show is naturally isomorphic to HM∗ is defined as follows. Recallthat an i-dimensional current on X is a functional on the space of differential i-forms Ωi(X).
1Some might call this construction the Morse-Smale-Witten complex due to its complicated history. See [1] forthe interesting history of Morse theory and Morse homology
73

The topology on Ωi(X) is defined by saying that a sequence of differential forms ωn converges toω if and only if for every compact set K ⊆ X all partial derivatives of ωn (in any coordinate system)converges uniformly to the partial derivatives of ω. A singular simplex σ : ∆i → X determines ani-dimensional current [σ] by
[σ](ω) =∫
∆i
σ∗ω
We define the chain groups Cci (X) of our homology theory to be the free abelian group generatedby [σ], where σ : ∆i → X is a singular i-simplex that is transverse to A (p) for all p ∈ crit(f). Thedifferential ∂ : Cci (X)→ Ccx−1(X) is defined by
∂[σ](ω) =∫
∆i
σ∗dω
where σ ∈ Ci(X) and ω ∈ Ωi−1(X). We clearly have ∂2 = 0 since d2 = 0. The homology of thischain complex will be denoted by Hc
i (X), and it is naturally isomorphic to singular homology.There is a natural compactification of D(p), for p ∈ crit(f), that is similar to theorem 7.1 by
adding broken flow lines.
Proposition 7.8. There is a natural compactification of D(p) to a smooth manifold with cornersD(p), whose codimension k stratum is
D(p)k =⋃
q1, . . . , qk ∈ crit(f)p, q1, . . . , qk distinct
Mf (p, q1)× Mf (q1, q2)× Mf (qk−1, qk)×D(qk)
In particular, for k = 1 we have
∂D(p) =⋃
p6=q∈crit(f)
(−1)µ(p)+µ(q)+1Mf (p, q)×D(q)
as oriented manifolds. Further, the projections of D(p) onto the last factor D(qk) patch together toform a smooth map e : D(p)→ X whose restriction to D(p) is the inclusion.
The compactified spaces D(p) are homeomorphic to a closed ball of dimension µ(p), and so themaps e : D(p) → X give X a CW-structure with one cell of dimension i for each critical point ofindex i. A consequence of this is that χ(X) is equal to
∑i(−1)ici where ci = # criti(f).
We now define maps D : CMi(X)→ Cci (X) and A : Cci (X)→ CMi(X) that are chain homotopyinverses of each other. For p ∈ criti(f) we have D(p) is a closed disc of dimension i.
UNFINISHED
7.5 Direct Invariance of Morse Homology
Now we will show that HM∗(f, g) does not depend on f and g directly. This line of reasoning ismore applicable to Floer homologies than section 7.4 since there might not be another well-knownhomology theory to compare to. Fix two Morse-Smale pairs (f0, g0) and (f1, g1) with associatedMorse complexes (C0
∗ , ∂0) and (C1
∗ , ∂1). Take any path of pairs Γ = (ft, gt) : t ∈ I from (f0, g0)
to (f1, g1). Two things to note: the pairs (ft, gt) do not have to be Morse-Smale for all t (in fact,it may be impossible), and such a path is always possible as all functions M → R are homotopicand any two metrics can be connected by a straight line of metrics. We will show how such a path(with some simple requirements) induces a chain map ΦΓ : C0
∗ → C1∗ .
74

Let Vt denote the negative gradient vector field of ft with respect to gt, and define the vectorfield VΓ on I ×X by
VΓ = (t+ 1)t(t− 1)∂
∂t+ Vt (7.2)
Since the two components of this vector field are gradient like vector fields, we can define criticalpoints, flow lines, ascending and descending manifolds in the regular way. In particular, the firstcoordinate of VΓ is just the gradient of the function R→ R defined by t 7→ 1
4(t+ 1)2(t− 1)2. Thisfunction only has critical points at −1, 0, 1 of index 0, 1, 0 respectively. Thus, the critical points ofindex i of VΓ are precisely
criti(VΓ) = 0 × criti−1(f0) ∪ 1 × criti(f1) (7.3)
We will say that the path Γ is admissible if the ascending and descending manifolds of the criticalpoints of VΓ intersect transversely. Just as almost all pairs (f, g) are Morse-Smale we also havethat almost all paths of pairs are admissible.
For critical points P,Q of VΓ we define MΓ(P,Q) to be the moduli space of flow lines of VΓ
from P to Q, and MΓ(P,Q) the moduli space of unparameterized flow lines. If Γ is admissible,thenMΓ(P,Q) is a (µ(P )−µ(Q))-dimensional manifold, and so MΓ(P,Q) is a (µ(P )−µ(Q)− 1)-dimensional manifold. The spaces MΓ(P,Q) are without boundary, but are not generally compact.We can compactify them via broken lines as before. We state this result only for the two specialcases we need. If µ(P ) = µ(Q)+1, then MΓ(P,Q) is already compact, and since it is 0-dimensionalwe have that it is just a finite collection of points. If µ(p) = i = µ(q) + 1, then µ((0, p)) = i + 1and µ((1, q)) = i − 1, then MΓ((0, p), (1, q)) is a 1-dimensional manifold with a compactification
MΓ((0, p), (1, q)) by adding broken flow lines that pass through one intermediate critical points ofindex i. These points correspond to eq. (7.3), and so we have
∂MΓ((0, p), (1, q)) =⋃
r∈criti−1(f0)
MΓ((0, p), (0, r))× MΓ((0, r), (1, q))
=⋃
r′∈criti(f1)
MΓ((0, p), (1, r′))× MΓ((1, r′), (1, q))
Note that a flow line between two points in the 0 ×X slice must stay in that slice for all time,and similarly for the 1 ×X slice. The flow lines in the these slices correspond to the flows of f0
and f1 in X, so we haveMΓ((0, p), (0, r)) = Mf0(p, r)
MΓ((1, r′), (1, q)) = Mf1(r′, q)
For p ∈ criti(f0) and q ∈ criti(f1) we have µ((0, p)) = i+1 and µ((0, q)) = i, hence MΓ((0, p), (1, q))is a compact 0-dimensional manifold. We now define ΦΓ : C0
i → C1i on p ∈ criti(f0) by
ΦΓ(p) =∑
q∈criti(f1)
#MΓ((0, p), (1, q)) · q
and extend this linearly to all of C0∗ (where MΓ((0, p), (1, q)) is counted modulo 2).
75

[0, 1]
(X, f0, g0)
(X, f1, g1)
p
q
r
r′
Figure 7.3: Counting flow lines from (0, p) to (1, q)
Proposition 7.9. ΦΓ is a map of chain complexes, i.e. the following diagram commutes
C0i
∂0//
ΦΓ
C0i−1
ΦΓ
C1i ∂1
// C1i−1
Proof. We will use the idea from the proof of proposition 7.7 by showing the coefficient of q ∈criti(f1) in (ΦΓ ∂0 − ∂1 ΦΓ)(p) is equal to a count of the number of boundary components of acompact 1-manifold, and hence is zero (modulo 2).
For p ∈ criti(f0) we have
ΦΓ ∂0(p) =∑
r∈criti−1(f0)
∑q∈criti−1(f1)
#Mf0(p, r) ·#MΓ((0, r), (1, q)) · q
∂1 ΦΓ(p) =∑
r′∈criti(f1)
∑q∈criti−1(f1)
#MΓ((0, p), (1, r′)) ·#Mf1(r′, q) · q (7.4)
Now it is clear that the coefficient of q ∈ criti−1(f1) in (ΦΓ ∂0−∂1 ΦΓ)(p) is precisely the number
of boundary components in the compact 1-manifold MΓ((0, p), (1, q)), hence zero. Therefore ΦΓ isa chain map.
We now have that admissible paths Γ induce maps on Morse homology ΦΓ∗ : HM∗(f0, g0) →HM∗(f1, g1). If we take Γ to be the constant path at a Morse-Smale pair (f, g), then we expect theinduced map ΦΓ to be the identity. This is indeed the case, as is shown in the following proposition.
Proposition 7.10. Let Γ be the constant path at the Morse-Smale pair (f, g). Then Γ is admissibleand ΦΓ = id
Proof. Let V be the vector field on [0, 1] × X induced by the constant path Γ, i.e. V = (t +1)t(t − 1) ∂∂t − ∇gf . Since the vector field (t + 1)t(t − 1) ∂∂t on [0, 1] is directed from 0 to 1, wehave that the descending manifold of a critical point (0, p) of V is D(0, p) = [0, 1)×D(p) and theascending manifold of a critical point (1, q) is A (1, q) = (0, 1]×A (q). These submanifolds clearly
76

intersect transversally. On the other hand, the ascending manifold of (0, p) is just 0 ×A (p) andthe descending manifold of (1, q) is just 1 × D(q), which do not intersect at all. Therefore V isadmissible.
For p, q ∈ criti(f), a flow from (0, p) to (1, q) in [0, 1]×X projects to a flow from p to q in the0 × X slice. This implies p = q since there are no flows between critical points of equal index,unless it is the constant flow. Therefore ΦΓ(p) = p.
Next, we would like to know that ΦΓ depends only on the homotopy type of the path Γ. Wewill use a different model for homotopies than the typical 1-parameter family of maps. Let D bea 2-dimensional manifold with corners such that D has two edges, call them e and e′, and twovertices, call them v and w. Such a space is sometimes called a digon. If Γ1,Γ2 are two pathsbetween pairs (f0, g0) and (f1, g1), then a homotopy is just a family of pairs Ψ = (fd, gd) : d ∈ Dsuch that when restricted to e it coincides with Γ1 and when restricted to e′ it coincides with Γ2.This means that (fv, gv) = (f0, g0) and (fw, gw) = (f1, g1).
Put a metric g on D such that the length of the edges is 1, and let f : D → R be a smoothfunction with only two critical points, one at v of index 2 and one at w of index 0. Further, assumethat the negative gradient vector field V = −∇egf with respect to g is tangent to the edges and isequal to (t+ 1)t(t− 1) on the edges. Finally, define the vector field VΨ on D×X by VΨ = V + Vd,where Vd is the negative gradient vector field of fd with respect to gd. Note that these constructionsare just a higher dimensional version of what we constructed to define VΓ. We see that VΨ restrictedto the slices e × X and e′ × X coincide with the vector fields VΓ1 and VΓ2 , respectively. We canagain define critical points, flow lines, ascending and descending manifolds of VΨ. Also, just likelast time, we will say that Ψ is admissible if the ascending and descending manifolds of criticalpoints intersect transversely, and almost all families are admissible.
The critical points of index i of VΨ are precisely
criti(VΨ) = v × criti−2(f0) + w × criti(f1)
For critical points P,Q of VΨ letMΨ(P,Q) be the moduli space of flow lines of VΨ from P to Q, andMΨ(P,Q) the moduli space of unparameterized flow lines. For any admissible family Ψ we havethat MΨ(P,Q) is a (µ(P ) − µ(Q))-dimensional manifold, and MΨ(P,Q) is a (µ(P ) − µ(Q) − 1)-dimensional manifold. Compactifying these spaces in full generality can be quite complicated, sowe state the results for the two special cases that we need.
If µ(P ) = µ(Q) + 1, then MΨ(P,Q) is already compact, and since it is 0-dimensional we havethat it is just a finite collection of points. If P = (v, p) and Q = (w, q) with µ(p) = i = µ(q),then µ((v, p)) = i + 2 and µ((w, q)) = i, hence MΨ((v, p), (w, q)) is a 1-dimensional manifold and
has a natural compactification to a 1-dimensional manifold MΨ((v, p), (w, q)) with boundary byadding broken flow lines. The boundary of this space has more points than one might think atfirst. The broken flow lines that pass through one intermediate critical point of index i + 1 are ofcourse included in the boundary, and these intermediate critical points are precisely
criti+1(VΨ) = v × criti−1(f0) ∪ w × criti+1(f1)
But, we also have boundary points coming from those flow lines which stay in the e×X and e′×Xfor all time. These flow lines are in correspondence with MΓ1((v, p), (w, q)) and MΓ2((v, p), (w, q)),
77

hence
∂MΨ((v, p), (w, q)) = MΓ1((v, p), (w, q)) ∪ MΓ2((v, p), (w, q))
∪⋃
r∈criti−1(f0)
MΨ((v, p), (v, r))× MΨ((v, r), (w, q))
∪⋃
r′∈criti+1(f1)
MΨ((v, p), (w, r′))× MΨ((w, r′), (w, q))
Note that the flow lines in D ×X that stay in the v ×X slice correspond to the flows in X withrespect to (f0, g0), and similarly for flow lines in the w×X slice, so in the above boundary we have
MΨ((v, p), (v, r)) = Mf0(p, r)MΨ((w, r′), (w, q)) = Mf1(r′, q)
Let us define the map HΨ : CMi(f0, g0)→ CMi+1(f1, g1) on p ∈ criti(f0) by
HΨ(p) =∑
q∈criti+1(f1)
#MΨ((v, p), (w, q)) · q
and extend linearly to CMi(f0, g0).
Proposition 7.11. For any two admissible paths Γ1,Γ2 from (f0, g0) to (f1, g1), the induced mapsΦΓ1 and ΦΓ2 are chain homotopic.
Proof. Let Ψ = (fd, gd) : d ∈ D be an admissible homotopy between Γ1 and Γ2. We claim thatHΨ defined above is a chain homotopy; that is, if we set E = ∂1 HΨ +HΨ ∂0 −ΦΓ1 + ΦΓ2 thenE(p) = 0 for all p ∈ crit(f). We show this by realizing the coefficient of q ∈ criti(f1) in E(p), where
p ∈ criti(f0), as the number of boundary components of MΨ((v, p), (w, q)), which we know to bezero since the space is a compact, 1-dimensional manifold.
We can easily compute the following
HΨ ∂0(p) =∑
r∈criti−1(f0)
∑q∈criti(f1)
#Mf0(p, r) ·#MΨ((v, r), (w, q)) · q
∂1 HΨ(p) =∑
r′∈criti+1(f1)
∑q∈criti(f1)
#MΨ((v, p), (w, r′)) ·#Mf1(r′, q) · q
Let us fix p ∈ criti(f0) and q ∈ criti(f1), then µ((v, p) = i+2 and µ((w, q)) = i, so MΨ((v, p), (w, q))is a 1-dimensional manifold and has its natural compactification described above. We see that bydefinition the coefficient of q in ΦΓ1(p) is precisely #MΓ1((v, p), (w, q)), and similarly for the coeffi-
cient of q in ΦΓ2(p). Now it is clear that the coefficient of q in E(p) is precisely #∂MΨ((v, p), (w, q)),hence zero.
Now we have that ΦΓ∗ depends only on the homotopy class of the path Γ. However, all pathsbetween any two pairs are homotopic (since C∞(M) and the space of metrics is contractible), soΦΓ∗ does not even depend on Γ. This means that just by virtue of the construction of Morsehomology we always get a natural map Φ∗ : HM∗(f0, g0)→ HM∗(f1, g1) for any Morse-Smale pairs(f0, g0) and (f1, g1). We want to show that this naturally defined map is an isomorphism, whichmeans that Morse homology depends only on X.
78

D
(X, f1, g1)
(X, f0, g0)
p
q
r
r′
v
w
Figure 7.4: Counting flow lines from (v, p) to (w, q) in D ×X
In order to show this we need composition of paths Γ2 ∗ Γ1 (where Γ1’s ending point is Γ2’sstarting point) to correspond to composition of induced maps ΦΓ2∗ ΦΓ1∗; that is, we need to showthat ΦΓ2∗Γ1 is chain homotopic to ΦΓ2∗ ΦΓ1∗. To show this we need to introduce a new apparatussimilar to the digon from above. First, slightly homotope Γ2 ∗ Γ1 so that it is admissible. Then,let T be a trigon; that is, a 2-manifold with 3 corners, u, v, w, and 3 edges, euv, evw, euw. LetΩ = (fd, gd) : d ∈ T be a family of pairs such that (fu, gu) = Γ1(0), (fv, gv) = Γ1(1) = Γ2(0),(fw, gw) = Γ2(1), and such that Ω restricted to euv is Γ1, restricted to evw is Γ2, and restrictedto euw is Γ2 ∗ Γ1. Put a metric g on T such that the edges are of length one, and take a smoothfunction f : T → R whose only critical points are u, v, w with µ(u) = 2, µ(v) = 1 and µ(w) = 0,and the negative gradient V = −∇egf is tangent to the edges of T and like (1 + t)t(1 − t). Definethe vector field VΩ on T × X by VΩ = V + Vd, where Vd = −∇gdfd. We can define the criticalpoints, flow lines, ascending and descending manifolds of VΩ in the regular way. We say that Ω isan admissible family if the ascending and descending manifolds of VΩ intersect transversely.
The critical points of index i of VΩ are precisely
criti(VΩ) = u × criti−2(fu) ∪ v × criti−1(fv) ∪ w × criti(fw)
For critical points P,Q of VΩ let MΩ(P,Q) be the moduli space of flow lines from P to Q, andMΩ(P,Q) the moduli space of unparameterized flow lines. For any admissible family Ω we havethat MΩ(P,Q) is a (µ(P ) − µ(Q))-dimensional manifold and MΩ(P,Q) is a (µ(P ) − µ(Q) − 1)-dimensional manifold. Like the spaces MΨ considered above, the space MΩ(P,Q) may haveboundary, and their compactifications can be quite complicated. The description of this space canvary greatly depending on where P and Q are, so we state the results we need in the only twospecial cases used.
If µ(P ) = µ(Q)+1, then MΩ(P,Q) is already compact, and since it is a 0-dimensional manifoldwe have that it is just a finite set of points. If P = (u, p) and Q = (w, q) with µ(p) = i = µ(q), thenµ((u, p)) = i+ 2 and µ((w, q)) = i, hence MΩ((u, p), (w, q)) is a 1-dimensional manifold and has a
natural compactification to a 1-dimensional manifold MΩ((u, p), (w, q)) with boundary by addingbroken flow lines. The broken flow lines that pass through one intermediate critical point of indexi+ 1 are contained in the boundary, and these points are precisely
criti+1(VΩ) = u × criti−1(fu) ∪ v × criti(fv) ∪ w × criti+1(fw)
79

But, we also have boundary points coming from those flow lines that stay in the euw ×X slice forall time. These flow lines correspond to MΓ2∗Γ1((u, p), (w, q)), hence
∂MΩ((u, p), (w, q)) = MΓ2∗Γ1((u, p), (w, q))
∪⋃
r∈criti−1(fu)
MΩ((u, p), (u, r))× MΩ((u, r), (w, q))
∪⋃
r′∈criti+1(fw)
MΩ((u, p), (w, r′))× MΩ((w, r′), (w, q))
∪⋃
s∈criti(fv)
MΩ((u, p), (v, s))× MΩ((v, s), (w, q))
Note that flow lines that stay in the u ×X slice correspond to Mfu(p, r), and similarly for flowsthat stay in the w ×X slice. Therefore we have
MΩ((u, p), (u, r)) = Mfu(p, r)
MΩ((w, r′), (w, q)) = Mfw(r′, q)
Further, the flows from (u, p) to (v, s) must stay in the euv ×X slice and similarly for flows from(v, s) to (w, q), so we have
MΩ((u, p), (v, s)) = MΓ1((u, p), (v, s))
MΩ((v, s), (w, q)) = MΓ2((v, s), (w, q))
See figure 7.5.We define GΩ : CMi(fu, gu)→ CMi+1(fw, gw) on p ∈ criti(fu) by
GΩ(p) =∑
q∈criti+1(fw)
#MΩ((u, p), (w, q)) · q
and extend linearly to all of CMi(fu, gu).
Proposition 7.12. ΦΓ2∗Γ1 is chain homotopic to ΦΓ2 ΦΓ1.
Proof. Let Ω = (fd, gd) : d ∈ T be an admissible family between Γ1,Γ2 and Γ2 ∗ Γ1. We claimthat the map GΩ defined above is a chain homotopy between ΦΓ2∗Γ1 and ΦΓ2 ΦΓ1 , i.e. if we setE = ∂w GΩ + GΩ ∂u − ΦΓ2∗Γ1 + ΦΓ2 ΦΓ1 , then the coefficient of q ∈ criti(fw) in E(p) is zerofor all p ∈ criti(fu).
We can easily compute
GΩ ∂u(p) =∑
q∈criti(fw)
∑r∈criti−1(fu)
#Mfu(p, r) ·#MΩ((u, r), (w, q)) · q
∂w GΩ(p) =∑
q∈criti(fw)
∑r′∈criti+1(fw)
#MΩ((u, p), (w, r′)) ·#Mfw(r′, q) · q
ΦΓ2 ΦΓ1(p) =∑
q∈criti(fw)
∑s∈criti(fv)
#MΓ1((u, p), (v, r)) ·#MΓ2((v, r), (w, q)) · q
Now it is clear that the coefficient of q ∈ criti(fw) in E(p), where p ∈ criti(fu), is precisely
#∂MΩ((u, p), (w, q)), hence zero.
80

u
v
w
p
q
r
r′
sT
Figure 7.5: Counting flow lines from (u, p) to (w, q) in T ×X
Combining propositions 7.10 to 7.12 we get invariance of Morse homology.
Corollary 7.2. For any two Morse-Smale pairs (f0, g0) and (f1, g1), the Morse homologies HM∗(f0, g0)and HM∗(f1, g1) are naturally isomorphic.
7.6 Orientations on Moduli Spaces
There are (at least) two ways to introduce orientations on our moduli spacesMf (p, q) and Mf (p, q)so that we can define the Morse complex with Z coefficients. One way is geometric and technicallythe simplest way to define orientations, but it does not generalize to the infinite dimensional ver-sions of Morse homology. The other way is very technical and uses high powered machinery fromfunctional analysis, but also has obvious interpretations in the infinite dimensional setting. We willgive a superficial description of both of these orientations, and explain why they should give thesame end result.
For the geometric orientations we must assume that our Riemannian manifold (Xn, g) is ori-ented. Let us also fix a Morse function f on X so that (f, g) is a Morse-Smale pair. We statedin proposition 7.1 that the ascending manifold A (p) and descending manifold D(p) of a criticalpoint p ∈ criti(f) are smoothly embedded discs of dimension i and n− i, respectively. Let us defineM f (p, q) to be the intersection D(p)∩A (q), which is a submanifold of dimension µ(p)−µ(q). Weget an R action on M f (p, q) via the 1-paremeter group of diffeomorphisms ϕt : X → X generatedby −∇gf : for t ∈ R and x ∈M f (p, q) we define t · x = ϕt(x). This action is free and smooth, soM f (p, q) = M f (p, q)/R is a (µ(p)− µ(q)− 1)-dimensional manifold.
Proposition 7.13. The map φ :Mf (p, q)→M f (p, q) defined by φ(u) = u(0) is a diffeomorphism,and for each t ∈ R the following diagram commutes
Mf (p, q) t· //
φ
Mf (p, q)
φ
M f (p, q)
t·// M f (p, q)
where t· on the horizontal arrows denotes the R action on the respective spaces. In particular,M f (p, q) is diffeomorphic to Mf (p, q).
Let us put an arbitrary orientation on TpD(p) for all p ∈ crit(f). Since TpD(p)⊕TpA (p) = TpX,and TpX is oriented by assumption, we get an induced orientation on TpA (p). These orientations
81

at p uniquely extend to coherent orientations on all of A (p) and D(p), and so now all ascendingand descending submanifolds are oriented. Now the spaces M f (p, q) get an induced orientation, asdescribed in section 1, so we can orientMf (p, q) by requiring the isomorphism φ in proposition 7.13to be orientation preserving.
UNFINISHED
7.7 Applications
The Morse inequalities are set of nice results that put topological restrictions on a space accordingto what type of Morse functions the space admits, and they nearly come for free with the definitionof Morse homology. It was these inequalities that inspired Floer to define his infinite dimensionalgeneralization of Morse homology in order to prove the Arnold conjecture. Since HM∗(f, g) isisomorphic to H∗(X) we already have that the Euler characteristic of X can be computed byχ(X) =
∑(−1)i# criti(f) for any Morse function f on X. The Morse inequalities strengthen this
quite a bit.First we need to prove a general result concerning finitely generated chain complexes.
Theorem 7.2 (Euler-Poincare Theorem). Take any finitely generated chain complex
0 −→ Cn∂n−→ Cn−1
∂n−1−→ · · · ∂2−→ C1∂1−→ C0 −→ 0
and let Hi = Hi(C∗, ∂∗). Then
n∑i=0
(−1)i rankCi =n∑i=0
rankHi
Proof. At each i = 0, . . . , n we have a short exact sequence
0 −→ ker ∂i −→ Ci∂i−→ im ∂i −→ 0
hence rankCi = rank ker ∂i + rank im ∂i. We also have a short exact sequence
0 −→ im ∂i+1 −→ ker ∂i −→ Hi −→ 0
hence rank ker ∂i = rank im ∂i+1 + rankHi. There is a common rank ker ∂i in each of the equationswe derived from these short exact sequences, and solving for it gives
rank ker ∂i = rankCi − rank im ∂i = rank im ∂i+1 + rankHi
Thereforen∑i=0
(−1)i (rankCi − rank im ∂i) =n∑i=0
(−1)i (rank im ∂i+1 + rankHi)
On the left side we have that rank im ∂i appears with sign (−1)i+1, and on the right rank im ∂iappears with sign (−1)i−1, hence they cancel and we are left with
n∑i=0
(−1)i rankCi =n∑i=0
(−1)i rankHi
82

Theorem 7.3 (Morse Inequalities). Let f : Xn → R be a Morse function. Let ci = # criti(f) bethe number of critical points of index i, and let bi = rankHi(X) be the i-th Betti number of X.Then
ck − ck−1 + · · ·+ (−1)kc0 ≥ bk − bk−1 + · · ·+ (−1)kb0 (7.5)
for all 0 ≤ k ≤ n.
Proof. We have rankHMi(f, g) = rankHi(X) = bi and rankCMi(f, g) = # criti(f). SinceHMi(f, g) is a subquotient of CMi(f, g), we clearly have ci ≥ bi. Let 0 ≤ k ≤ n, and let (C∗, ∂∗)denote the chain complex (CM∗, ∂∗) truncated at k:
0 −→ Ck∂−→ Ck−1
∂−→ · · · ∂−→ C1∂−→ C0 −→ 0
The chain complex (C∗, ∂∗) is finitely generated, so by the Euler-Poincare theorem we have
k∑i=0
(−1)i+k rankCi =k∑i=0
(−1)i+k rankHi(C∗, ∂∗) (7.6)
The inserted signs (−1)k are necessary so that the last term (i = k) in the sums are non-negative.The homology of the chain complex (C∗, ∂∗) is equal to the homology of (CF∗, ∂∗) in all gradingsexcept possibly the last, so we have rankHi(C∗, ∂∗) = bi for all 0 ≤ i ≤ k − 1. For the lastterm we have Hk(C∗, ∂∗) = ker ∂k, hence Hk(CM∗, ∂∗) is a quotient of Hk(C∗, ∂∗), and so we havebk ≤ rankHk(C∗, ∂∗). By replacing the last term rankHk(C∗, ∂∗) in (7.6) with the smaller term bkwe obtain the Morse inequality
ck − ck−1 + · · ·+ (−1)kc0 ≥ bk − bk−1 + · · ·+ (−1)kb0
7.8 Witten’s Complex
In a paper on supersymmetry in physics, Witten was able to rediscover the Morse inequalities(see theorem 7.3) and Morse (co)homology by considering a simple supersymmetric theory on theexterior bundle Λ∗T ∗X of a compact, orientable manifold Xn. First we discuss the mathematicalcontent of his results without mentioning any of the physics.
Let us recall some of the basic results of Hodge theory. If we put a metric g on X, thenwe get an induced volume form volg, and we get a star operator ? : Ωk(X) → Ωn−k(X) whichsatisfies ?2 = (−1)k(n−k) idΩk(X). The de Rham operator d : Ωk(X) → Ωk+1(X) has a formaladjoint δ : Ωk(X) → Ωk−1(X), which can be defined by δ = (−1)kn+n+1 ? d?. We define theLaplace operator ∆ : Ωk(X) → Ωk(X) by ∆ = dδ + δd. This operator has discrete spectrum, anddecomposes Ωk(X) into eigenspaces
Ωk(X) =⊕λ∈R
Ekλ where Ekλ =ω ∈ Ωk(X) : ∆ω = λω
The fundamental theorem of Hodge theory is the following.
Theorem 7.4 (Hodge’s Theorem). Ek0 ∼= HkdR(X)
83

So, we can think of (E∗0 , d) has a finite dimensional chain complex (the differential happens tobe zero) that “computes” the homology of the infinite dimensional chain complex (Ω∗(X), d). Weclearly have d(Ekλ) ⊆ Ek+1
λ , so for λ > 0 we also get a chain complex
0 −→ E0λ
d−→ E1λ
d−→ · · · d−→ Enλ −→ 0
However, this sequence is exact. To see this, let ω ∈ Ekλ such that dω = 0, then
d(λ−1δω
)= λ−1dδω = λ−1∆ω = λ−1λω = ω
therefore ω is exact. This means that the homology of the complex (E∗λ, d) is zero. Now, for fixedλ0 > 0, let
Ωkλ0
=⊕λ≤λ0
Ekλ
That is, Ω∗λ0consists of all the eigenforms of ∆ with eigenvalue less than or equal to λ0. Now,
the restriction of d to Ω∗λ0gives a finite dimensional complex (Ω∗λ0
, d), and since this complex is adirect sum of exact sequences (when λ ∈ (0, λ0]) and a sequence with homology equal to de Rhamhomology (when λ = λ0), we have
H∗(Ω∗λ0, d) = H∗dR(X)
If we have chosen λ0 large enough so that there is an eigenvalue of ∆ in (0, λ0], then we have re-placed the infinite dimension complex (Ω∗, d) with a non-trivial finite dimensional complex (Ω∗λ0
, d)without changing the homology.
We now repeat these same ideas with a slight variation of Hodge theory. For a fixed Morsefunction f : X → R and real parameter t we define the operator dt : Ωk(X)→ Ωk+1(X) by
dt = e−ftdeft
that is, we conjugate the de Rham operator by the linear isomorphism ω 7→ e−ftω. The function fwill remained fixed in our discussion, but we will be taking t to be large soon, so we only put t in ournotation. We clearly have d2
t = 0, and this operator has the formal adjoint δt : Ωk(X)→ Ωk−1(X)defined by
δt = eftδe−ft
and so we define the Laplacian ∆t = dtδt + δtdt. We can also define the homology groups H∗t (X) =ker dt/ im dt, but the isomorphism Ωk → Ωk given by ω 7→ e−ftω descends to an isomorphismH∗dR(X) ∼= H∗t (X), so this homology theory does not give us anything new. Like before we get aneigenspace decomposition
Ωk(X) =⊕λ∈R
Ekλ(t) where Ekλ(t) =ω ∈ Ωk(X) : ∆tω = λω
We also have a Hodge-like theorem that says Ek0 (t) ∼= Hk
dR(X). Also like before, for λ > 0 we havean exact sequence
0 −→ E0λ(t) dt−→ E1
λ(t) dt−→ · · · dt−→ Enλ (t) −→ 0
So, if for fixed λ0 > 0 we define Ωkλ0
(t) =⊕
λ≤λ0Ekλ(t), then the finite dimensional complex
(Ω∗λ0(t), dt) has the same homology as (Ω∗, d). At this point Witten claims that for sufficiently
84

large t >> 0, the dimensions dim Ωkλ0
(t) become independent of t, and so let us write (Ω∗λ0(∞), d∞)
to denote this “stabilized” chain complex. In fact, Witten shows that
dim Ωkλ0
(∞) = # critk(f) = ck
As we saw in theorem 7.3, whenever we have a finite dimensional complex whose chain groupscorrespond to critical points of a Morse function, and whose homology computes the homologyof X, then we get the Morse inequalities for free. So, we have proved the Morse inequalities byconsidering a variation of Hodge theory.
Now let us see the physical ideas behind the above results. Using the definition of dt and δt,one can easily compute that these operators act on a k-form ω ∈ Ωk(X) by
dtω = dω + tdf ∧ ω δtω = δω − tidfωIf we choose coordinates (x, U) on X, and define the operators A∗iω = i ∂
∂xiω and Aiω = dxi ∧ ω,
then one can show that ∆t can be written as
∆t = ∆ + t2 ||df ||2 + tn∑i=1
∂2f
∂xi∂xj[A∗i , Aj ]
As t gets large we expect the eigenforms of this operator to be increasingly concentrated at thecritical points of f . This leads us to look around the critical points. If p ∈ crit(f), then we canchoose normal coordinates (x, U) around p such that f is of the form
f = f(p) +n∑i=1
λi(xi)2 +O(x3)
where the λi’s are the eigenvalues of the Hessian of f at p. In these coordinates, if we ignore termsof order 3 and above, then Laplacian ∆t can be approximated by
∆t =n∑i=1
(− ∂2
(∂xi)2+ t2λ2
i (xi)2 + tλi[A∗i , Ai]
)This looks like a simple harmonic oscillator, plus some other operator. Recall that for a > 0, thesimple harmonic oscillator
H = − d2
dx2+ a2x2
has spectrum (2k + 1)a : k = 0, 1, . . .. So, let us write our approximation of the Laplacian as
∆t =n∑i=1
(Hi + tλiKi)
where Hi = −∂2/(∂xi)2 + t2λi(xi)2 and Ki = [A∗i , Ai]. The Hi’s commute with themselves,the Ki’s commute with themselves, and the Hi’s commute with the Kj ’s. Therefore the spec-trum of ∆t is the sum of the spectrum of the Hi’s and Ki’s. The spectral of Hi is given by(2Ni + 1)t|λi| : Ni = 0, 1, . . .. One can easily compute that
Kidxi1 ∧ · · · ∧ dxik =
+dxi1 ∧ · · · ∧ dxik i ∈ i1, . . . , ik−dxi1 ∧ · · · ∧ dxik i /∈ i1, . . . , ik
85

so the eigenvalues of this operator are just +1’s and −1’s. In fact, the number of +1 eigenvalues isprecisely k. Now, the spectrum of ∆t can be written as the set
t
n∑i=1
((2Ni + 1)|λi|+ niλi) :Ni = 0, 1, . . .ni = ±1
# ni = +1 = k
What choice of Ni and ni give zero? If we rewrite the summand as 2Ni|λi| + |λini| + niλi, thenwe see that we are forced to have Ni = 0 and ni = − sign(λi). Therefore, there is exactly one zeroeigenvalue of ∆t, and all other eigenvalues blow up to ∞ since they are proportional to t. Further,associated eigenform is a k-form, where
k = # ni = +1 = # λi < 0 = µ(p)
So, at each critical point p ∈ crit(f), we are able to associate a µ(p)-form ω such that ∆tω = 0.Since ∆t is only an approximation of ∆t, we do not necessarily have that ∆tω = 0. Therefore, thenumber of k-forms ω which satisfy ∆tω = 0 at some critical point of index k (i.e. the number ofcritical points of index k) is greater than or equal to the number of k-forms with ∆ω = 0 (i.e. thek-th Betti number of X). This proves the weak Morse inequalities.
86

8 Heegaard Floer Homology
8.1 Construction for 3-Manifolds
The Morse homology discussed in the previous section has inspired variations that usually go underthe heading of Floer-type theories. These theories start with some differential equation (in Morsehomology this was the negative gradient flow equation), then one forms a graded group freelygenerated by some points in a space or some other objects, and then one defines a differentialto count the number of solutions to the differential equation that start at one point and end atanother. Hopefully the differential squares to zero so that one can define the homology groups, andhopefully the homology groups do not depend on the various choices used in the construction ofthis homology theory. We now follow this plan to build a homology theory for 3-manifolds fromHeegaard diagrams.
General Idea
First, we will give a general idea of the object we are trying to construct. The details in thisconstruction are very difficult, like it was for Morse homology, requiring a lot of machinery fromanalysis and symplectic geometry. Let (Σ, α1, . . . , αg, β1, . . . , βg) be a genus g Heegaard diagramfor a 3-manifold Y , and assume the α and β curves are in general position so that they intersecttransversally. Let us also fix a base point z in the complement of the α and β curves. We canform the symmetric product Symg(Σ) of Σ, defined to be the quotient of Σ×g under the actionof Sg permuting the components of Σ×g, i.e. Symg(Σ) consists of g-tuples of unordered points ofΣ. Even though Sg does not act freely on Σ, we do have that Symg(Σ) is a smooth manifold, andin fact a complex structure j on Σ induces a complex structure Symg(j) on Symg(Σ).
Since the α curves never intersect each other (and similarly for the β curves), we have that theproducts
Tα = α1 × · · · × αg Tβ = β1 × · · · × βgare smoothly embedded submanifolds of Symg(Σ), and Tα t Tβ, hence the intersect consists offinitely many points. The base point z determines a codimension 2 submanifold Vz of Symg(Σ)defined by
Vz = z × Symg−1(Σ) ⊂ Symg(Σ)
Clearly Vz is disjoint from the tori Tα and Tβ.Let D ⊂ C denote the unit disc, and let e1 = ∂D ∩ Re(z) ≥ 0 and e2 = ∂D ∩ Re(z) ≤ 0.
For two intersection points x,y ∈ Tα ∩ Tβ (this means that x and y are unordered g-tuples ofintersection points of the α and β curves) we define a Whitney disc connecting x to y to be acontinuous map u : D→ Symg(Σ) such that u(−i) = x, u(i) = y, u(e1) ⊂ Tα and u(e2) ⊂ Tβ. Letπ2(x,y) denote the homotopy classes of Whitney discs from x to y.
We define a function nz : π2(x,y) → Z to be the algebraic intersection number of a discφ : D → Symg(Σ) with the submanifold Vz. For a Whitney disc φ, let M(φ) denote the modulispace of pseudoholomorphic representatives of φ, i.e. the set of representatives u : D → Symg(Σ)of φ that satisfies the Cauchy-Riemann equation
∂u
∂s+ i
∂u
∂t= 0
If we introduce the proper perturbations of our set up, then M(φ) will be a smooth manifold, andwe denote its dimension by µ(φ). There is a natural free R acts on this space, and so we denotethe quotient by M(φ) =M(φ)/R.
87

With these definitions we can give an intuitive (but slightly incorrect) definition of HeegaardFloer homology. Let CF (α,β) be the Abelian group freely generated by the points in Tα ∩ Tβ.We define a differential ∂ : CF (α,β)→ CF (α,β) on x ∈ Tα ∩ Tβ by
∂x =∑
y∈Tα∩Tβφ∈π2(x,y)
˛nz(φ)=0µ(φ)=1
ff#M(φ) · y
That is, we are counting the number of pseudoholomorphic discs between two points in Symg(Σ).One can show that ∂2 = 0, so we can define the homology groups HF (α,β). One can also showthat HF (α,β) does not depend on the Heegaard diagram or complex structures chosen in orderto define it, hence HF (α,β) is a topological invariant. Now we work to properly define thesehomology groups.
Morse Functions and Pointed Heegaard Diagrams
Let us fix a Heegaard diagram (Σ, α1, . . . , αg, β1, . . . , βg) for our 3-manifold Y , where Σ is a surfaceof genus g. Recall that this means we attach a 2-handle for each α and β curve, the result being a3-manifold with boundary two disjoint 2-spheres, and so we attach two 3-handles in the only waypossible. So, the α and β curves determine handlebodies U0 and U1 of genus g such that U0∩U1 = Σ.We also have the following Morse theoretic picture of this set up. Let f : Y → [0, 3] be a self-indexing Morse function with g critical points of index 1, denote them by P1, . . . , Pg, and hence gcritical points of index 2, denote them by Q1, . . . , Qg. Then U0 = f−1[0, 3/2], U1 = f−1[3/2, 3] andΣ = f−1(3/2), and the attaching circles can be defined by αi = A (Pi) ∩ Σ and βi = D(Qi) ∩ Σ.We say that a Morse function is compatible with a Heegaard diagram if the Heegaard diagram isequal to the induced Heegaard diagram from the Morse function.
We can make this Heegaard diagram into a pointed Heegaard diagram by choosing a basepoint z ∈ Σ in the complement of the α and β curves. We can consider pointed Heegaard moveson pointed Heegaard diagrams by requiring that isotopies of attaching circles never pass throughz, and the pair of pants defining a handle slide is not allowed to contain z.
The Algebraic Topology of Symmetric Products
Let D denote the fat diagonal in Symg(Σ); that is, D consists of those ordered g-tuples of points inΣ such that at least points are equal. The embedded tori Tα and Tβ miss the diagonal, and sincethe α and β curves intersect transversally, we have Tα t Tβ in Symg(Σ). For a complex structurej on Σ, we get an induced complex structure Symg(j) on Symg(Σ) by requiring the quotient mapπ : Σ×g → Symg(Σ) to be holomorphic, where Σ×g is given the product complex structure j×g. Thehomotopy and homology groups of Symg(Σ) in low dimensions is stated in the following lemmas.
Lemma 8.1. If Σ is a genus g surface, then π1(Symg(Σ)) ∼= H1(Symg(Σ)) ∼= H1(Σ).
Proof. One can show that π1(Symg(Σ)) is abelian, so that gives the first isomorphism. For a fixedpoint x ∈ Σ, the inclusion Σ × x × · · · × x → Symg(Σ) induces an isomorphism H1(Σ) →H1(Symg(Σ)) on homology. To construct the inverse of this map we take a generic loop γ : S1 →Symg(Σ). If we pullback the g!-fold branched cover π : Σ×g → Symg(Σ) along γ we get a g!-fold
88

branched cover p : S1 → S1 such that the following commutes
S1eγ //
p
Σ×g
π
S1
γ// Symg(Σ)
The space S1 is a disjoint union of circles and has a natural Sg action on it such that γ is equivariant.Let S1 = S1/Sg, and let γ : S1 → Σ be the map induced by π1 γ, where π1 : Σ×g → Σ is theprojection onto the first factor. Then the map H1(Symg(Σ))→ H1(Σ) given by [γ] 7→ γ[S1] is theinverse map.
Recall that the fundamental group π1 of a space naturally acts on the higher homotopy groupsπn. Let π′n denote the quotient of πn by the action of π1.
Lemma 8.2. If Σ is a surface of genus g > 1, then π′2(Symg(Σ)) ∼= Z. Further, if g > 2, thenπ1(Symg(Σ)) acts trivially on π2(Symg(Σ)), so π2(Symg(Σ)) ∼= Z for g > 2.
Proof. The isomorphism π′2(Sym2(Σ)) ∼= Z is given by counting the algebraic intersection numberof a sphere with the subvariety x×Symg−1(Σ) for generic x. We can find an explicit generator. Thehyperelliptic involution on Σ gives rise to a sphere S0 ⊂ Sym2(Σ), and so let S = S0×x3×· · ·×xg ⊂Symg(Σ). Then S maps to 1 under the above isomorphism.
Lemma 8.3. The first Chern class c1 of Symg(Σ) satisfies 〈c1, [S]〉 = 1.
Lemma 8.4.H1(Symg(Σ))
H1(Tα)⊕H1(Tβ)∼= H1(Σ)〈[α1], . . . , [αg], [β1], . . . , [βg]〉
∼= H1(Y )
Proof. Since the inclusion of Σ into Symg(Σ) induces an isomorphism on first homology, we seethat the subgroup of H1(Σ) generated by the α curves gets maps to H1(Tα) in H1(Symg(Σ)), andsimilarly for the β curves, and so the first isomorphism follows. The second isomorphism is obvioussince we building Y from Σ by filling the α and β curves with discs.
There is a Morse theoretic interpretation of intersection points x ∈ Tα ∩ Tβ. Let f be aMorse function compatible with our Heegaard diagram with critical points P1, . . . , Pg of index 1and critical points Q1, . . . , Qg of index 2. If x = x1, . . . , xg such that xi ∈ αi ∩ βσ(i) (for somepermutation σ ∈ Sg), then we have xi ∈ A(Pi) ∩ D(Qσ(i)), hence xi can be identified with anunparameterized, gradient flow line from Pi to Qσ(i). The intersection point x can therefore beidentified with a g-tuple of flow lines from index 1 critical points to index 2 critical points, whichwe will denote by γx.
The tori Tα and Tβ in Symg(Σ) have a nice compatibility with the complex structure Symg(j)induced by j. First, recall the definition of a totally real submanifold of a complex manifold. IfL ⊂ Z is a submanifold of the complex manifold (Z, J), then we say that L is totally real ifTpL ∩ JTpL = 0 for all p ∈ L, i.e. the tangent spaces of L do not contain any J-complex lines. Itis clear that the tori Tα,Tβ are totally real when viewed as submanifolds of (Σ×g, j×g). Since theprojection π : Σ×g → Symg(Σ) is holomorphic and a g!-fold cover away from the diagonal D inSymg(Σ), it follows that Tα and Tβ are totally real submanifolds of Symg(Σ).
89

Whitney Discs in the Symmetric Product
There is an obstruction to the existence of Whitney discs between two intersection points x,y ∈Tα∩Tβ. By renaming the β curves, if necessary, we can assume that xi ∈ αi∩βi and yi ∈ αi∩βσ(i),for some permutation σ ∈ Sg. Take a pair of paths a : [0, 1] → Tα, b : [0, 1] → Tβ that start at xand end at y. The difference a − b is a loop in Symg(Σ), and hence determines a homology class.This element vanishes if and only if there is a Whitney disc connecting x to y. Unfortunately, thishomology class depends on the paths a and b, but we can remove this dependence in the followingway. The path a can be written as a(t) = (a1(t), . . . , ag(t)), where ai : [0, 1]→ αi, hence any otherpaths [0, 1]→ Tα differs from a by winding around the α curves some number of times. The waysthis winding can occur is parameterized by H1(Tα) ∼= Zg. Similar statements hold for the curveb and the β curves. So, by modding the subgroups H1(Tα) and H1(Tβ) out of H1(Symg(Σ)) thehomology class of a− b does not depend on a or b, and so the image of this homology class underthe isomorphisms in lemma 8.4 in H1(Y ) is denoted by ε(x,y).
There is also a way of computing this homology class on Σ. Note that a curve a : [0, 1] → Tαcan be thought of as a g-tuple of sub-arcs of the α curves such that the boundary (as a 1-chain)is ∂a = y1 + · · · + yg − x1 − · · · − xg. There is a similar description for a path b : [0, 1] → Tβ andthe β curves, hence the difference a − b is a 1-cycle in Σ. This cycle depends on the paths usedto define it, but only up to additional windings around α and β curves, hence it is a well-definedelement of H1(Σ)/ 〈[α1], . . . , [αg], [β1], . . . , [βg]〉. The image of this homology class in H1(Y ) underthe isomorphism in lemma 8.4 is equal to ε(x,y) that we defined above.
Clearly π2(x,y) is empty if and only if ε(x,y) 6= 0. Further, for x,y, z ∈ Tα ∩ Tβ we have theadditive relation ε(x,y) + ε(y, z) = ε(x, z), so we can define an equivalence relation on Tα ∩ Tβ byx ∼ y if ε(x,y) = 0.
The set π2(x,y) is not a group, but has a natural π′2(Symg(Σ)) action given by splicing a sphereonto a Whitney disc:
∗ : π′2(Symg(Σ))× π2(x,y) −→ π2(x,y)
We can also splice a disc from x to y with a disc from y to z to get a disc from x to z, giving amap
∗ : π2(y, z)× π2(x,y) −→ π2(x, z)
This splicing action makes π(x,x) into a group. The algebraic intersection map nz is clearly additivewith respect to these splicing actions: nz(ψ ∗ φ) = nz(ψ) + nz(φ).
Since it is difficult to visualize discs in Symg(Σ) we would like a way of representing them onthe surface Σ. Recall that the function nw : π2(x,y)→ Z counts the intersection of the subvarietyw×Symg(Σ) with a disk φ ∈ π2(x,y). Let D1, . . . , Dm denote the closures of the components ofΣ− α1 − · · · − αg − β1 − · · · − βg, and choose a point zi in the interior of each Di. For a Whitneydisc u : D→ Symg(Σ) we define the domain of φ to be the form linear combination
D(u) =m∑i=1
nzi(u)Di
If nzi(φ) ≥ 0 for all i, then we write D(φ) ≥ 0. This association does not depend on the points zi,and clearly depends only on the homotopy class of u, hence we get a well-defined map on π2(x,y).Domains are additive with respect to the splicing action defined above:
D(ψ ∗ φ) = D(ψ) +D(φ)
D(S ∗ φ) = D(φ) +∑
Di
90

For φ ∈ π2(x,y), we can think of D(φ) as a 2-chain on Σ in the following way. Let u ∈ φ be arepresentative of φ, then the restriction u|e1 can be thought of as a curve from x to y contained inTα, and u|e2 can be thought of as a curve from y to x contained in Tβ. As noted before, curvesof this type determine 1-chains in Σ with boundaries ∂u|e1 = y1 + · · · + yg − x1 − · · · − xg and∂u|e2 = x1 + · · ·+ xg − y1 − · · · − yg. So, the boundary of the 2-chain D(u) is precisely
∂D(u) =∑i
nzi(u)(∂u|e1 + ∂u|e2)
A 2-chain of the form P =∑aiDi is said to be a periodic domain if the boundary ∂P is a sum of
α and β curves and such that if Di is the component containing z, then ai = 0 (i.e. nz(P ) = 0).For x ∈ Tα ∩Tβ, a class φ ∈ π2(x,y) is called periodic if nz(φ) = 0. For such a class we have D(φ)is periodic. The set of periodic classes at x will be denoted by Px.
Proposition 8.1. If g > 1, then there is an isomorphism
π2(x,x) ∼= Z⊕H1(Y )
where Px is identified with H1(Y ), and the splitting is given by φ 7→ nz(φ). If x,y ∈ Tα ∩ Tβ suchthat ε(x,y) = 0, then
π2(x,y) ∼= Z⊕H1(Y )
as π′2(Symg(Σ))× Px-torsors.
Spinc Structures
We now introduce Spinc structures into our set up. We use Turaev’s formulation of Spinc structureson 3-manifolds in terms of homology classes of unit vector fields. We say that two unit vector fieldsV1 and V2 are homologous if they are homotopic through unit vector fields in the complement offinitely many 3-balls in Y . A Spinc structure on Y is a choice of homology class of non-vanishingvector fields, and the set of Spinc structures on Y is denoted by Spinc(Y ). Recall the following factabout orientable 3-manifolds.
Lemma 8.5. All closed, orientable 3-manifolds are parallelizable.
Proof. Let X be a closed, orientable 3-manifold. If we can find two linearly independent sectionsof TX, then TX can be split as a 2-plane bundle plus a line bundle, which must be orientable andhence trivial. The first obstruction to finding two linearly independent sections is the second Stiefel-Whitney class, which by the Wu formula is given by w2 = w2
1 = 0. The only other obstruction livesin the cohomology of Y with coefficients in π2(V2(R3)) = 0, hence vanishes.
Since TY is trivial we now fix an orthonormal trivialization τ . This trivialization gives us a oneto one correspondence between unit vector fields V on Y and maps fV : Y → S2. Fix a generatorµ ∈ H2(S2) and define the map δτ : Spinc(Y )→ H2(Y ) by δτ (V ) = f∗V (µ).
Lemma 8.6. δτ is well-defined and is a one-to-one correspondence.
Proof. First we need to show that if V1 is homologous to V2, then δτ (V1) = δτ (V2). Let fV1 , fV2 :Y → S2 be the maps corresponding to V1 and V2. By assumption these maps are homotopic onthe complement of 3-ball in Y . UNFINISHED
91

If V1 and V2 are unit vector fields on Y , then we can look at the difference
δ(V1, V2) = δτ (V1)− δτ (V2) ∈ H2(Y )
We have removed the trivialization τ from the notation because this difference does not dependon it. For if τ1, τ2 are two trivializations of TY , then there is a map g : Y → SO(3) such thatτ1(Vp) = g(p) · τ2(Vp) for all vectors Vp in TpY . So, if we take two trivializations τ, g · τ , then thedifference satisfies
δg·τ (V )− δτ (V ) = g∗(w)
where w is the generator of H2(SO(3); Z/2) = Z/2, so the difference does not depend on trivial-izations. So, for fixed V ∈ Spinc(Y ) the one-to-one correspondence δ(v,−) : Spinc(Y ) → H2(Y )makes Spinc(Y ) into an affine space over H2(Y ). For V1, V2 ∈ Spinc(Y ) we will write V1 − V2 as ashort hand for δ(V1, V2).
Now let f be a Morse function on Y compatible with our Heegaard diagram Recall that anintersection point x ∈ Tα ∩ Tβ determined a g-tuple of flow lines from index 2 to index 1 criticalpoints, which we denoted by γx. The base point z has a unique flow line going through it from theindex 3 critical point to the index 0 critical point. If we delete tubular neighborhoods of these g+1flow lines from Y we get a space with boundary consisting of g+ 1 spheres such that ∇gf does notvanish. The restriction of ∇gf to a boundary component is an index 0 vector field on a sphere,and hence can be extended to the ball it bounds. Extending ∇gf to the interior of these spheres,and normalizing so that the vector field is unit length, we define sz(x) to be the Spinc structurethis vector field defines. This gives us a map
sz : Tα ∩ Tβ −→ Spinc(Y )
Lemma 8.7. For x,y ∈ Tα ∩ Tβ we have sz(y)− sx(x) = PD(ε(x,y)).
Therefore sz(x) = sz(y) if and only if x can be connected to y by a Whitney disc. If s ∈ Spinc(Y )is represented by a vector field V , then we let s be the Spinc structure represented by −V . Thefirst Chern class of Spinc structures is a map c1 : Spinc(Y )→ H2(Y ) defined by c1(s) = s− s. Thisis just the first Chern class of the 2-plane bundle over Y given as the orthogonal complement of avector field V representing s.
Analytic Set-Up of the Moduli Spaces
Our definition of the moduli space of pseudoholomorphic representatives is not going to be sufficientin order to ensure that the spaces M(φ) are smooth manifolds. We need to introduce suitableperturbations to the objects involved, which we do now. The quotient map
π : Σ×g → Symg(Σ)
is an honest covering map over Symg(Σ)−D. Let us fix a Kahler structure (j, η) on the surface Σ;that is, j is complex structure on Σ and η is a non-degenerate 2-form on Σ such that j tames η. The2-form ω0 = η×g on Σ×g induces a Kahler form π∗(ω0) on Symg(Σ)−D. Let us fix a collection ofpoints zi ⊂ Σ − α1 − · · · − αg − β1 − · · · − βg, with one zi in each component, and an open setV ⊂ Symg(Σ) with (zi × Symg−1(Σ) ∪D) ⊂ V ⊂ Symg(Σ)
and such that the closure V does not intersect the tori Tα and Tβ. We say that an almost complexstructure J on Symg(Σ) is (j, η, V )-nearly symmetric if J tames π∗(ω0) over Symg(Σ) − V , and J
92

agrees with Symg(j) over V . The space of (j, η, V )-nearly symmetric, almost complex structureswill be denoted by J (j, η, V ). The tameness condition gives us that the tori Tα and Tβ are totallyreal, which is used for energy bounds and Gromov compactness.
We will now describe a more convenient model for Whitney discs. Since the unit disc in C withtwo boundary points removed can be holomorphically identified with the infinite strip [0, 1] × iR,we redefine D to be this infinite strip. Then π2(x,y) consists of the homotopy classes of maps ufrom D into Symg(Σ) such that u(1×R) ⊂ Tα, u(0×R) ⊂ Tβ, and u(s− i∞) = x, u(s+ i∞) = y.For a path J : [0, 1]→ J (j, η, V ) of nearly symmetric, almost complex structures on Symg(Σ) andφ ∈ π2(x,y), we define the moduli space
MJs(φ) =u ∈ φ :
∂u
∂s+ Js
∂u
∂t= 0
There is an R action on Mjs(φ) given by (r · u)(s, t) = u(s + i(t + r)). We define the space ofunparameterized pseudoholomorphic discs to be the quotient
MJs(φ) =MJs(φ)
RLemma 8.8. If u ∈MJs(φ) is a Js-holomorphic disc, then D(u) ≥ 0.
Proof. Since Js is (j, η, V )-nearly symmetric, we have that Js is an honest complex structure ina neighborhood of each zi × Symg−1(Σ). Therefore the disc u must intersect these subvarietiesnon-negatively.
Now we can set up the necessary Banach manifolds and vector bundles to show that MJs(φ)is a smooth manifold. For a vector bundle E over [0, 1] × R and let p, δ > 0 be real numbers andk ≥ 0 an integer. We can put a δ-weighted Sobolev norm on the space of sections of E defined by
||σ||W p,kδ
=k∑j=0
∫[0,1]×R
∣∣∣∣∣∣∇(j)σ(s+ it)∣∣∣∣∣∣ eδτ(t) ds ∧ dt
where τ : R → R is some smooth function with τ(t) = |t| for |t| ≥ 1. The space of sections forwhich this norm is finite is denoted by W k,p
δ (E).For p > 2 let Bδ(x,y) be the space of maps u : [0, 1] × R → Symg(Σ) in W p,1
loc satisfying thefollowing additional properties:
1. The curve u satisfies the boundary conditions u(1× R) ⊂ Tα, u(0× R) ⊂ Tβ.
2. The curve u converges to the points x and y as t 7→ ±∞ exponentially in the sense that thereis T >> 0 and functions
ξ− ∈W p,1δ ([0, 1]× (−∞,−T ], Tx Symg(Σ)) ξ+ ∈W p,1
δ ([0, 1]× [T,∞), Ty Symg(Σ))
such that for all t > T we have
u(s− it) = expx(ξ−(s− it)) u(s+ it) = expy(ξ+(s+ it))
The space Bδ(x,y) is a Banach manifold modeled on W p,1δ ([0, 1] × R,R2g), and the tangent space
at u ∈ Bδ(x,y) is precisely
TuBδ(x,y) =ξ ∈W p,1
δ (u∗T Symg(Σ)) : ξ(1, t) ∈ Tα, ξ(0, t) ∈ Tβ
93

For form the Banach vector bundle πE : E → Bδ(x,y) defined by (at least as a set)
E =⋃
u∈Bδ(x,y)
u × Lpδ(u∗T Symg(Σ))
which has characteristic fiber Lpδ([0, 1]×R,R2g). We define a section F : Bδ(x,y)→ E of this vectorbundle by
F (u) =(u,∂u
∂s+ Js
∂u
∂t
)Now we haveMJs(x,y) is F−1(0E), where 0E is the zero section of the vector bundle. The verticaldifferential of this section at a curve u ∈ F−1(0E) is of the form (in coordinates)
DFu : W p,1δ ([0, 1]× R,R2g) −→ Lpδ([0, 1]× R,R2g)
DFu(v) =∂v
∂s+ Js
∂v
∂t+ (∇vJ(s))
∂u
∂tThis is a Fredholm operator, and so MJs(x,y) is a finite dimensional submanifold of Bδ(x,y). Infact, the Fredholm index of DFu acting on the unweighted space (δ = 0) is precisely the Maslovindex of u. Clearly the components of Bδ(x,y) are in correspondence with the homotopy classes inπ2(x,y), and the Fredholm index of DFu is constant on each of these components.
Theorem 8.1. Fix a Heegaard diagram (Σ,α,β), with α and β curves intersecting transversally,and fix data (j, η, V ). Then for generic path Js of (j, η, V )-nearly symmetric, almost complex struc-tures we have MJs(x,y) is a smooth manifold.
Definition of HF
For simplicity we will restrict to the case b1(Y ) = 0 so that H1(Y ) ∼= H2(Y ) are finite.Fix a pointed Heegaard diagram (Σ,α,β, z) for Y such that the α and β curves intersect
transversally, and choose a Spinc structure s ∈ Spinc(Y ). We also fix a generic complex structurej on Σ and a generic path Js of nearly-symmetric almost complex structures on Symg(Σ). LetCF (α,β, s) be the Z/2 vector spaces generated by all x ∈ Tα ∩ Tβ such that sz(x) = s. We givethis vector space a relative Z-grading by
gr(x,y) = µ(φ)− 2nz(φ)
where φ is any homotopy class in π2(x,y). Since any other disc φ′ ∈ π2(x,y) must be of the formφ′ = φ ∗ kS we have
µ(φ ∗ kS)− 2nz(φ ∗ kS) = µ(φ) + kµ(S)− 2 (nz(φ) + knz(S)) = µ(φ)− 2nz(φ) + 2k − 2k
therefore gr(x,y) is independent of the φ chosen. We define the differential ∂ : CF (α,β, s) →CF (α,β, s) by
∂x =∑
y∈Tα∩Tβsz(y)=s
∑φ∈π2(x,y)µ(φ)=1nz(φ)=0
#M(φ) · y
The second sum actually consists of at most one term since there is at most one Whitney discφ ∈ π2(x,y) such that µ(φ) = 1 and nz(φ) = 0. Technically ∂ depends on Js, and so we maysometimes write ∂Js . Note that if y has non-zero coefficient in ∂x, then
gr(x,y) = µ(φ)− 2nz(φ) = 1
so ∂ lowers the grading by 1.
94

Theorem 8.2. ∂2 = 0
Now we have that (CF (α,β, s), ∂) is a chain complex, and so we can define its homology groups,which we denote by HF (α,β, s). We also define
HF (α,β) =⊕
s∈Spinc(Y )
HF (α,β, s)
8.2 Invariance of Heegaard Floer Homology
8.2.1 Independence of Complex Structures
Theorem 8.3. Let Y be a closed oriented 3-manifold with fixed Spinc structure s. Then thehomology group HF (Y,α,β, s) is independent of the complex structure j on Σ and the path Js.
Proof. Let us fix a complex structure j on Σ and take two paths Js,0, Js,1 of (η, j, V )-nearly sym-metric almost complex structures, and connect them via a path J : [0, 1] × R → J (η, j, V ) suchthat Js,t = Js,0 for t ≤ 0 and Js,t = Js,1 for t ≥ 1. For a Whitney disc φ ∈ π2(x,y) we define themoduli space of time-dependent holomorphic representatives by
MJs,t(φ) =u : [0, 1]× R→ Symg(Σ) :
u ∈ φduds + Js,t
dudt = 0
We define the map
ΦJs,t :(CF (α,β, s), ∂Js,0
)−→
(CF (α,β, s), ∂Js,1
)by
ΦJs,t(x) =∑
y∈Tα∩Tβsz(y)=s
∑φ∈π2(x,y)µ(φ)=0nz(φ)=0
#MJs,t(φ) · y
This map is well-defined, so we have to show that it is a chain map and induces an isomorphism onhomology. To see that ΦJs,t is a chain map we look at the boundary components of a compact 1-dimensional space, namelyMJs,t(ψ) when µ(ψ) = 1. Composing ΦJs,t with the boundary operatorswe see that
ΦJs,t ∂Js,0(x) = ΦJs,t
∑y∈Tα∩Tβsz(y)=s
∑φ∈π2(x,y)µ(φ)=1nz(φ)=0
#MJs,0(φ) · y
=∑
y,z∈TαTβsz(y)=sz(z)=s
∑φ∈π2(x,y)φ′∈π2(y,z)µ(φ)=1µ(φ′)=0
nz(φ)=nz(φ′)=0
#MJs,0(φ) ·#MJs,t(φ′) · z
95

∂Js,1 ΦJs,t(x) = ∂Js,1∑
y∈Tα∩Tβsz(y)=s
∑φ′∈π2(x,y)µ(φ′)=0nz(φ′)=0
#MJs,t(φ′) · y
=∑
y,z∈Tα∩Tβsz(y)=sz(z)=s
∑φ′∈π2(x,y)φ∈π2(y,z)µ(φ′)=0µ(φ)=1
nz(φ′)=nz(φ)=0
#MJs,t(φ′) ·#MJs,1(φ) · z
By Gromov’s compactness we see that for ψ ∈ π2(x, z) with µ(ψ) = 1 we have that MJs,t(ψ) canbe compactified to a 1-dimensional manifold MJs,t(ψ) with boundary
∂MJs,t(ψ) =
∐φ′∗φ=ψ
MJs,0(φ)×MJs,t(φ′)
∐ ∐φ∗φ′=ψ
MJs,t(φ′)× MJs,1(φ)
where the unions are over those homotopy classes of discs such that µ(φ′) = 0 and µ(φ) = 1. Now itis clear that the number of boundary components ofMJs,t(ψ) (modulo 2) is precisely the coefficientof z in (ΦJs,t ∂Js,0 − ∂Js,1 ΦJs,t)(x). Therefore ΦJs,t is a chain map.
To show that the induced map on homology is an isomorphism we show that ΦJs,t ΦJs,1−t ischain homotopic to the identity map. To define the chain homotopy we take a path Js,t,τ betweenthe juxtaposition (in the t coordinate) Js,1−t ∗ Js,t path and the path Js (constant in t). We definethe moduli space of this path to be
MJs,t,τ (φ) =⋃
τ∈[0,1]
MJs,t(τ)(φ)
This is a manifold of dimension µ(φ) + 1, and it already has some boundary components corre-sponding to the τ = 0 and τ = 1 ends. In particular,
∂MJs,t,τ (φ) =MJs,1−t(φ)×MJs,t(φ) ∪MJs(φ) (8.1)
We define the proposed chain homotopy HJs,t,τ :(CF (α,β, s), ∂Js,0
)→(CF (α,β, s), ∂Js,0
)by
HJs,t,τ (x) =∑
y∈Tα∩Tβsz(y)=s
∑φ∈π2(x,y)µ(φ)=−1nz(φ)=0
#MJs,t,τ (φ) · y
Clearly this map is of degree −1. We want to check that the coefficient of z in (∂Js,0 HJs,t,τ +HJs,t,τ ∂Js,0 + ΦJs,t ΦJs,1−t + id)(x) is zero by relating it to the number of boundary componentsin a compact 1-dimensional manifold. The 1-dimensional manifold MJs,t,τ (ψ) (with ψ ∈ π2(x, z)and µ(ψ) = 0) can be compactified by adding broken flows. The boundary of this compactificationhas three forms: two of these correspond to the boundary components of MJs,t,τ (ψ) as shown in(8.1), and now we get an additional form from once broken flows. These broken flows are of theform ∐
φ′∗φ=ψ
MJs,0(φ)×MJs,t,τ (φ′)
∐ ∐φ∗φ′=ψ
MJs,t,τ (φ′)× MJs,0(φ)
96

where the union is over homotopy classes of discs with µ(φ) = 1 and µ(φ′) = −1. It is now clearlythat the boundary components of the compactification of MJs,t,τ (ψ) correspond to the coefficientof z in the chain homotopy formula, and hence is zero.
8.2.2 Independence of Isotopies of Attaching Circles
Now we need to check that the homology groups HF (α,β, s) are invariant under Heegaard movesin our diagram (Σ,α,β). Due to the construction of the chain complex CF (α,β, s) we can onlyconsider pointed moves (those moves which never cross the fixed base point z ∈ Σ), so we need tomake sure that pointed moves generate all moves.
Proposition 8.2. Any two Heegaard diagrams (Σ,α,β, z) and (Σ′,α′,β′, z′) that determine thesame 3-manifold can be transformed into each other via a finite sequence of pointed Heegaard moves.
Proof. We know that we can connect the two diagrams with regular Heegaard moves, so we claimthat each of these moves can be slightly altered to be a pointed move. Clearly stabilization canbe made to miss the base point, and we can slightly isotope the attaching band used in making ahandle slide to also miss the base point. So, we really need to only look at isotopies of the attachingcircles.
Suppose we slightly isotoped the attaching circle α1 to α1, and in the process it crossed the basepoint z. If we surger out the rest of the α curves we obtain a torus with 2g − 2 marked points. Inthis torus α1 can clearly be isotoped to α1 without crossing the base point. However, each markedpoint α1 crosses during this isotopy corresponds to a handleslide across the corresponding handlein Σ. Therefore we can replace the isotopy of α1 to α1 that crossed z with a sequence of handleslides and isotopies that missed z.
Theorem 8.4. Let Y be a closed, oriented 3-manifold equipped with two Heegaard diagrams(Σ,α,β, z) and (Σ,α′,β′, z) such that one can be obtained from the other via a pointed isotopyof the attaching circles. Then
HF (Σ,α,β) ∼= HF (Σ,α′,β′)
Proof. If the two Heegaard diagrams are isotopic via pointed isotopies that keep the α and β curvestransverse at all times, then this is equivalent to varying the metric (or equivalently the complexstructure) on Σ, which we does not change the homology groups by theorem 8.3.
So, we need to consider isotopies that introduce new intersection points between the α and βcurves. We need to do this in a controlled manner, and the way we do this is via exact Hamiltonianflows, so let us recall this machinery. Fix a Hamiltonian Ht : X → R such that Ht = 0 for t /∈ [0, 1].This gives rise to a 1-parameter family of Hamiltonian vector fields Xt defined by
ω(Xt, ·) = dHt
Now this generates a 1-parameter family of diffeomorphisms Ψt : X → X such that
dΨt
dt= Xt
Let us apply this to a special Hamiltonian. Take a smooth bump function h : Σ → R such thatsupph is a small neighborhood of a point on α1 and let f : R→ [0, 1] be smooth with supp f ⊆ (0, 1).The define the Hamiltonian Ht(x) = f(t)h(x) so that the corresponding 1-parameter family ofdiffeomorphisms Ψt moves a small piece of α1 a little bit, but leaves everything else fixed.
97

We now use the isotopies to introduce a pair of canceling intersection points. Suppose α1 isslightly isotoped via an exact Hamiltonian flow to intersect with β1 transversally in an extra pairof canceling points. We can assume this isotopy is supported in Σ\(α2 ∪ · · · ∪ αg ∪ z). The isotopyΨt of Σ induces an isotopy of the torus Tα in Symg(Σ) in the obvious way.
We can now define Whitney discs with dynamic boundary conditions. In particular, a Ψt-Whitney disc from x ∈ Tα ∩ Tβ to y ∈ Ψ1(Tα) ∩ Tβ is a map u : D→ Symg(Σ) satisfying (here weare thinking of D as [0, 1]× R)
u(1 + it) ∈ Ψt(Tα), for all t ∈ Ru(0 + it) ∈ Tβ, for all t ∈ Ru(s− i∞) = x
u(s+ i∞) = y
Let πΨt2 (x,y) denote the set of homotopy classes of such discs, and letMΨt(φ) be the moduli space
of pseudoholomorphic representatives of φ ∈ πΨt2 (x,y). The reason we use these exact Hamiltonian
flows to move the α curves is that one can prove that we still have energy bounds on holomorphicdiscs, and so we can still form the Gromov compactifications.
We can now define a chain map
ΓΨt : CF (α,β) −→ CF (α′,β)
by the formulaΓΨt(x) =
∑y∈Ψ1(Tα)∩Tβ
∑φ∈πΨt
2 (x,y)nz(φ)=0µ(φ)=0
#MΨt(φ) · y
UNFINISHED
8.2.3 Independence of Handle Slides
In order to prove invariance under handle slides we need to introduce Whitney triangles and gener-alize all of our results about Whitney discs to triangles. A Heegaard triple diagram of genus g is agenus g surface Σ with three g-tuples α,β,γ of homologically independent curves in Σ. These curvesdetermine genus g handlebodies Uα, Uβ, Uγ and 3-manifolds Yαβ = Uα ∪ Uβ, Yβγ = Uβ ∪ Uγ , Yαγ =Uα ∪ Uγ . This information specifies a 4-manifold Xαβγ with boundary ∂Xαβ = Yαβ ∪ Yβγ ∪ Yαγin the following way. Let ∆ be the standard 2-simplex with vertices vα, vβ, vγ and edges eα, eβ, eγwhere ei connects vj to vk and i 6= j, i 6= k. If we thicken up Σ by ∆× Σ, then we can glue on thepieces ei × Ui via
Xαβγ =(∆× Σ)
∐(eα × Uα)
∐(eβ × Uβ)
∐(eγ × Uγ)
(eα × Σ) ∼ (eα × Uα), (eβ × Σ) ∼ (eβ × Uβ), (eγ × Σ) ∼ (eγ × Uγ)
The corners of this manifold can naturally be smoothed out.For x ∈ Tα ∩ Tβ,y ∈ Tβ ∩ Tγ , z ∈ Tα ∩ Tγ , we say that a map u : ∆→ Symg(Σ) is a Whitney
triangle connecting x,y, z if u(vγ) = x, u(vα) = y, u(vβ) = z and u(eα) ⊂ Tα, u(eβ) ⊂ Tβ, u(eγ) ⊂Tγ . Let π2(x,y, z) denote the homotopy classes of such maps.
There is an obstruction in the first homology group ofXαβγ to the existence of Whitney triangles.Let a, b, c : [0, 1]→ Symg(Σ) be any paths in Tα,Tβ,Tγ from x to y, y to z and z to z, respectively.
98

Then a + b + c is a 1-cycle in Symg(Σ). Its homology is not well-defined, but its image in thequotient
H1(Symg(Σ))H1(Tα) +H1(Tβ) +H1(Tγ)
∼= H1(Xαβγ)
is well-defined, and we denote it by ε(x,y, z). We have that π2(x,y, z) is non-empty if and onlyif ε(x,y, z) = 0. We can also define the map nz : π2(x,y, z) → Z to be the algebraic intersectionnumber of a triangle with the subvariety z × Symg−1(Σ). The splicing action of discs can beextended to splice a disc and a triangle together. In particular, if φ ∈ π2(x,y) and ψ ∈ π2(y, z,w),then we can splice these together to get a triangle ψ ∗ φ ∈ π2(x, z,w). Clearly nz is additive withrespect to this splicing action: nz(ψ ∗ φ) = nz(ψ) + nz(φ).
We can also extend the definition of domain of a Whitney disc to Whitney triangles. In particu-lar, D(ψ) is a 2-chain in Σ consisting of the formal linear combinations of the regions Σ\(α∪β∪γ).Such a linear combination is said to be a triply-periodic domain if the coefficient of the region con-taining z is zero and its boundary is a sum of α,β and γ curves. The triple (Σ,α,β,γ, z) is saidto be weakly admissible if every non-zero triply-periodic domain has both positive and negativecoefficients.
(todo: blah blah blah ... more to do on the above)If (Σ,α,β,γ) is a weakly-admissible Heegaard triple, then we construct the map
fαβγ : CF (α,β)⊗ CF (β,γ) −→ CF (α,γ)
by counting pseudoholomorphic triangles:
fαβγ(x⊗ y) =∑
z∈Tα∩Tγ
∑ψ∈π2(x,y,z)nz(ψ)=0µ(ψ)=0
#M(ψ) · z (8.2)
If we give CF (α,β)⊗ CF (β,γ) the differential ∂(x⊗ y) = ∂x⊗ y + x⊗ ∂y, then fαβγ is a chainmap. To verify this we need to show the following
∂fαβγ(x⊗ y) + fαβγ(∂x⊗ y) + fαβγ(x⊗ ∂y) = 0
for all x ∈ Tα∩Tβ and y ∈ Tβ ∩Tγ . This holds because there are three types of ends in the modulispace M(ψ) when µ(ψ) = 1 that correspond to splicing a disc onto one of the three vertices of thetriangle.
Let Fαβγ denote the induced map on homology. These maps satisfy an important associativelaw, which we state now. For this we take a Heegaard quadruple (Σ,α,β,γ, δ, z) and so we get fourmaps fαβγ , fαγ,δ, fαβδ, fβγδ from counting pseudoholomorphic triangles and their induced maps onhomology Fαβγ , Fαγδ, Fαβδ, Fβγδ. These maps satisfy
Fαγδ(Fαβγ(−⊗−)⊗−) = Fαβδ(−⊗ Fβγδ(−⊗−))
This is shown by constructing a chain homotopy between the various compositions via countingpseudoholomorphic rectangles. In particular, we can develop the theory of Whitney rectanglesu : → Symg(Σ) in the obvious way, and define the set of homotopy classes of such rectangles byπ2(x,y, z,w). If ϕ is a homotopy class of Whitney rectangles, then M(ϕ) will denote the space ofpseudoholomorphic representatives. We can now define the map
hαβγδ : CF (α,β)⊗ CF (β,γ)⊗ CF (γ, δ) −→ CF (α, δ)
99

by counting pseudoholomorphic rectangles:
hαβγδ(x⊗ y⊗ z) =∑
w∈Tα∩Tδ
∑ϕ∈π2(x,y,z,w)
nz(ϕ)=0µ(ϕ)=0
#M(ϕ) ·w
We claim this map determines a chain homotopy between the maps fαγδ(fαβγ(− ⊗ −) ⊗ −) andfαβδ(−⊗ fβγδ(−⊗−)); that is, we need to show that
∂hαβγδ(x⊗ y⊗ z) + hαβγδ(∂(x⊗ y⊗ z)) + fαγδ(fαβγ(x⊗ y)⊗ z) + fαβδ(x⊗ fβγδ(y⊗ z)) = 0
Note that ∂(x⊗ y⊗ z) = ∂x⊗ y⊗ z + x⊗ ∂y⊗ z + x⊗ y⊗ ∂z, so the above expands to
∂hαβγδ(x⊗ y⊗ z) + hαβγδ(∂x⊗ y⊗ z)+
hαβγδ(x⊗ ∂y⊗ z) + hαβγδ(x⊗ y⊗ ∂z)+
fαγδ(fαβγ(x⊗ y)⊗ z) + fαβδ(x⊗ fβγδ(y⊗ z)) = 0
The coefficient of w in these six terms correspond to the six types of ends of the moduli spaceM(ϕ), where ϕ ∈ π2(x,y, z,w) is a rectangle with µ(ϕ) = 1. In particular, the first four termscorrespond to splicing a disc onto one of the four corners of the rectangle, and the last two termscorrespond to the rectangle degenerating into two triangles meeting at a vertex in two differentways.
We could continue these constructions to discuss pseudoholomorphic m-gons, and their asso-ciative laws, but now we will discuss the handle slide invariance of Floer homology. First we lookat two model calculations that will be used in constructing the isomorphisms.
Example 8.1. . Take the standard Heegaard diagram for #gS1×S2: Σ = E# · · ·#E is the g-foldconnected sum of the torus E, and αi, βi are curves supported in the ith factor that bound discsin the solid genus g handlebody (i.e. they are meridians) and intersect transversally in a pair ofcanceling points. Let z ∈ Σ be a base point far from the α and β curves. Orient these curves inthe same direction and label the positive and negative intersection points of αi and βi by w±i .
We claim that, up to grading shifts, HF (α,β) ∼= H∗(T g). There are 2g intersect points inTα ∩ Tβ, and we can write these as ordered pairs x = (x1, . . . , xg) such that xi = w+
i or w−i . Inparticular, for an integer 1 ≤ i ≤ g, take x,y ∈ Tα∩Tβ such that xi = w+
i , yi = w−i and xj = yj forall j 6= i. The curves αi and βi bound two discs in Σ, call them D1i and D2i, and let φ1, φ2 ∈ π2(x,y)be discs with D(φ1) = D1i and D(φ2) = D2i. It is clear that µ(φ1) = µ(φ2) = 1. Clearly, ifφ′1, φ
′2 ∈ π2(y,x) are discs with D(φ′1) = −D1i and D(φ′2) = −D2i, then µ(φ′1) = µ(φ′2) = −1.
Now for any x,y ∈ Tα ∩ Tβ and φ ∈ π2(x,y) with nz(φ) = we can find the precise value ofµ(φ). Recall that we can think of these discs as a products of the standard discs from xi to yiin Σ. Let p(x) denote the number of w+
i ’s in x. Then of course we can assume xi = w+i and
yi = w+i for i ≤ p(x), hence we have µ(φ) = p(x) − p(y). This gives us the relative gradings,
gr(x,y) = p(x)− p(y), hence the generators are partitioned into g gradings. If we give the lowestrelative grading an absolute grading of 0, then we see that there are precisely
(gi
)generators in
grading i.Finally, we claim that ∂ = 0, which completes the proof of our claim. For any x ∈ Tα ∩ Tβ
let y be a generator with gr(x,y) = 1. If φ ∈ π2(x,y) with nz(φ) = 0, then 1 = gr(x,y) =µ(φ) = p(x)− p(y), hence x has one more + coordinate than y. This means there is an i for which
100

xi = w+i , yi = w−i and xj = yj for j 6= i. As we saw before there are exact two discs connecting
these points, and #M = 1 for both, hence y has zero coefficient in ∂x.The generator of HF (α,β, z) with highest grading is represented by the cycle Θαβ =
w+
1 , . . . , w+g
.
We will use Θαβ to denote both the cycle and the homology class.
Example 8.2. . We take another Heegaard diagram of #gS1×S2, but this time with one handleslid across another. In particular, let Σ = E1# · · ·#Eg, with each Ei a torus, and let αi be a curvesupported in Ei going once around the meridian of Ei. For i > 1 let γi be a curve supported inEi going once around the meridian and intersecting αi in a pair of canceling points. Finally, let γ1
be the curve supported in E1#E2 that is the result of sliding α1 across γ2, and perturbed so thatit intersects α1 in a pair of canceling points and does not intersect either α2 or γ2. Again we canorient the intersection points of the α and γ curves with w±i .
We claim that, up to grading shifts, HF (α,γ) ∼= H∗(T g).UNFINISHED
With these model calculations out of the way we can now prove handle slide invariance. Fixa Heegaard diagram (Σ,α,β) for Y , let γ be a g-tuple of attaching circles such that γ1 is ahandle slide of β1 across β2 and γi (i > 1) is a small perturbation of βi intersecting in a pairof canceling points, and δ is another g-tuple of attaching circles that are small perturbations ofthe β curves such that they intersect at a pair of canceling points. Then the Heegaard diagrams(Σ,α,β), (Σ,α,γ), (Σ,α, δ) all describe Y , and the diagrams (Σ,β,γ), (Σ,γ, δ), (Σ,β, δ) all de-scribe #gS1 × S2. Let Θβγ , Θγδ, Θβδ denote the top grading generators of the Floer homologyof the latter three diagrams. We claim that the map f : CF (α,β) → CF (α,γ) defined byf = fαβγ(− ⊗ Θβγ) is a quasi-isomorphism (let F denote the induced map on homology). Wealready know that the map g : CF (α,β) → CF (α, δ) defined by g = fαβδ(− ⊗ Θβδ) is a quasi-isomorphism, and the associativity law gives us
F (ξ) = Fαβγ(ξ ⊗ Θβγ)
= Fαβγ(ξ ⊗ Fβδγ(Θβδ ⊗ Θδγ))
= Fαδγ(Fαβδ(ξ ⊗ Θβδ)⊗ Θδγ))
The last line is a composition of two isomorphisms, Fαδγ(− ⊗ Θδγ) and Fαβδ(− ⊗ Θβδ), whichwas checked in our model calculations, hence F is an isomorphism. This concludes the proof ofinvariance under handle slides.
8.2.4 Independence of Stabilizations
Theorem 8.5. Let (Σ,α,β, z) be a pointed Heegaard diagram for Y , and let (Σ#E,α′,β′, z) be astabilization, where E is a torus and α′ = α∪αg+1 ,β′ = β∪βg+1 with αg+1, βg+1 homologicallyindependent curves on E intersecting once. Then
HF (α,β) ∼= HF (α, αg+1,β, βg+1)
Proof. We can arrange this stabilization such that the torus E is glued to Σ along a region containedin the component of Σ\(α∪β) containing the base point z. Let c ∈ Σ#E be the intersection pointof αg+1 and βg+1, and let α′ = β∪βg+1 and α′ = α∪αg+1. Let z′ be the corresponding base pointin Σ#E. We clearly have Tα′ ∩ Tβ′ = Tα ∩ Tβ ∪ c, so this gives us an identification of the chaingroups CF (α,β, z) and CF (α′,β′, z′). If x,y ∈ Tα ∩ Tβ and x′ = x× c ,y′ = y× c, then for
101

φ ∈ π2(x,y) with nz(φ) = 0 and φ′ ∈ π2(x′,y′) with nz′(φ′) we have an identification of the modulispaces M(φ′) =M(φ)× c. Therefore the chain complexes are identical.
8.3 The Surgery Exact Sequence
For this section we mostly follow the presentations in [2] and [3]. Let k be a knot in a closed, oriented,integral homology 3-sphere Y . The knot determines a meridian µ in ∂νk, uniquely determined (upto isotopy) by the property that µ is not null-homologous in ∂νk but is null-homologous in νk, anda longitude ` in ∂νk, uniquely determiend (up to isotopy) by the property that ` is null-homologousin Y \k and #(` ∩ µ) = −1. Let Y0 and Y1 denote the 0- and +1-surgeries on k, i.e. we fill thetorus Y \νk with a torus whose meridian is mapped to ` and µ + `, respectively. The theorem wewill work to prove is the following.
Theorem 8.6. There is an exact sequence relating the Heegaard Floer homologies of Y, Y0 and Y1:
HF (Y0)bF0 // HF (Y1)
bF1||zzzz
zzzz
HF (Y )
bFbbDDDDDDDD
(8.3)
There is a considerable amount of machinery we need to set up before we can prove this. Firstwe need to construct special Heegaard diagrams for Y, Y0 and Y1. In fact, we claim there is apointed Heegaard multi-diagram (Σ,α,β,γ, δ, z) such that
1. The Heegaard diagrams (Σ,α,β), (Σ,α,γ), (Σ,α, δ) describe Y, Y0, Y1 respectively.
2. The curves βi, γi, δi, for i = 1, . . . , g − 1, are small isotopic translates of each other thatpairwise, transversally intersect in a pair of canceling points.
3. The curve δg is isotopic to the juxtaposition of βg and γg.
Note that the last two conditions imply that (Σ,β,γ), (Σ,γ, δ), (Σ,β, δ) are all Heegaard diagramsof #(g−1)S1×S2. To construct these special Heegaard diagrams take a self-indexing Morse functionf on Y \νk with one index 0 critical point, g index 1 critical points and (g − 1) index 2 criticalpoints, and set Σ = f−1(3/2). Recall that the attaching circles have the following description. Theα curves are precisely where the ascending manifolds of index 1 critical points intersect Σ, andthe β curves are where the descending manifolds of index 2 critical points intersect Σ. We fill themissing torus in Y \νk by adding a 2-handle in three different ways, and then adding the 3-handlein the unique way to obtain a closed manifold. First we attaching a 2-handle with attaching circleµ, thus obtaining Y . Next we attach a 2-handle with attaching circle `, obtaining Y0. Finally, weattach a 2-handle with attaching circle µ+ `, obtaining Y1. Flowing these attaching circles down tothe surface Σ gives us the circles βg, γg, δg respectively. Let γi and δi be small isotopies of βi (fori = 1, . . . , g − 1) so that these curves pairwise intersect transversally at a pair of canceling points.We have now constructed the Heegaard multi-diagram (Σ,α,β,γ, δ) with the proposed properties.
Label the intersection points of the β,γ and δ curves as in example 8.1
y±i = βi ∩ γi v±i = γi ∩ δi w±i = βi ∩ δiAlso, the curves βg, γg, δg pairwise intersect in exactly one point, so let
yg = βg ∩ γg vg = γg ∩ δg wg = βg ∩ δg
102

Recall the intersection points Θβγ =y+
1 , . . . , y+g−1, yg
, Θγδ =
v+
1 , . . . , v+g−1, vg
and Θβδ =
w+1 , . . . , w
+g−1, wg
are cycles in the top grading of HF (β,γ), HF (γ, δ) and HF (β, δ) respectively.
Recall that we have the following chain maps from counting pseudoholomorphic triangles
fαβγ : CF (α,β)⊗ CF (β,γ) −→ CF (α,γ)
fαγδ : CF (α,γ)⊗ CF (γ, δ) −→ CF (α, δ)
fαβδ : CF (α,β)⊗ CF (β, δ) −→ CF (α, δ)
fβγδ : CF (β,γ)⊗ CF (γ, δ) −→ CF (β, δ)
and their induced maps Fαβγ , Fαγδ, Fαβδ, Fβγδ on homology. Let hαβγδ be the chain homotopybetween the two compositions fαγδ(fαβγ(−⊗ −) ⊗−) and fαβδ(− ⊗ fβγδ(− ⊗−)), which is givenby counting pseudoholomorphic rectangles.
Now we can define the maps in the surgery exact sequence. We define
F = Fαβγ(−⊗ Θβγ)
F0 = Fαγδ(−⊗ Θγδ)
F1 = Fαβδ(−⊗ Θβδ)
First we show that any composition of consecutive maps in this sequence is zero. If ξ ∈ CF (α,β),then one composition looks like
F0 F (ξ) = Fαγδ(Fαβγ(ξ ⊗ Θβγ)⊗ Θγδ) = Fαβδ(ξ ⊗ Fβγδ(Θβγ ⊗ Θγδ))
where we used the associativity law in the last equality. So, if we can show that Fβγδ(Θβγ⊗Θγδ) = 0,then we will have shown that this first composition is zero. We can do this directly by examiningthe Heegaard triple (Σ,β,γ, δ).
We think of this diagram as the first g − 1 torus summands in Σ having three meridian inter-secting pairwise in a pair of canceling points y±i , v
±i , w
±i (the curves being βi, γi, δi, i = 1, . . . , g− 1,
of course), and in the last summand we have three straight curves intersecting pairwise in one point(the curves being βg, γg, δg). Let us examine each of these summands as a model calculation.
Suppose E is a torus with three curves β, γ, δ isotopic to a meridian and such that they pairwiseintersect in a pair of intersecting points y±, v±, w± and with a base point z far from these curves.Then there is a unique homotopy class of triangles connecting y+, v+ and w+ such that its domainis non-negative and nz = 0.
Now suppose E is a torus with three curves β, γ, δ such that β is isotopic to the meridian, γ isisotopic to the longitude, δ is isotopic to β + γ, and they pairwise intersect at one point, denotedby y, v, w. Then for each integer k > 0 there are exactly two homotopy classes ψ±k of trianglesconnecting y, v and w such that nz(ψ±k ) = k(k−1)
2 . To this we lift to the universal cover of E, whichis R2. The lifts of β, γ, δ become the lines x = i , y = i , and
y = x+ i+ 1
2
, for i ∈ Z. Then
we can take ψ+k to be the triangle bounded by
x = 0, y = 0, y = x+ k + 1
2
and ψ−k to be the
triangle bounded byx = 0, y = 0, y = x− k + 1
2
. Further, for each of these triangles there is a
unique holomorphic representative, and so µ(ψ±k ) = 0.Now let us go back to our original situation. We can think of Σ = E1# · · ·#Eg as a sum of tori
with the curves βi, γi, δi supported in Ei. Then the situations in the first g − 1 summands of Σ isidentical to the first example we examined above, and the situation in the last summand of Σ is
103

identical to the last example we examined above. Since the base point z ∈ Σ is placed away fromthe curves we can see that there are exactly two homotopy classes ψ± of triangles from Θβγ , Θγδ
and Θβδ such that nz(ψ±) = 0 = µ(ψ±) and D(ψ±) ≥ 0. These homotopy classes are obtainedby taking the product of the first g − 1 triangles between the points y+
i , v+i , w
+i , and then taking
the product with one of the homotopy classes between yg, vg, wg. Further, each of these homotopyclasses admit the same number of pseudoholomorphic representatives, so #M(ψ+) = #M(ψ−).
Consider the quantity fβγδ(Θβγ ⊗ Θγδ), which we saw above that if this quantity is zero, thenwe have F0 F = 0. Referring to (8.2) for the definition of fβγδ we see that only the coefficient ofΘβδ can possibly have a non-zero coefficient in fβγδ(Θβγ ⊗ Θγδ). However, the coefficient of thisgenerator is the sum of the number of pseudoholomorphic triangles between Θβγ , Θγδ, Θβδ, whichis ≡ 0 mod 2. Therefore fβγδ(Θβγ ⊗ Θγδ) = 0.
We can use completely symmetrical arguments to show that the other two compositions F1 F0
and F0 F are both zero, therefore the surgery triangle is a chain complex. In order to show thatthis chain complex has trivial homology we will use a slightly technical framework in homolog-ical algebra. So, we take a moment to provide the necessary homological background for theseconstructions.
Homological Algebra Background
Let (A1, ∂1) and (A2, ∂2) be chain complexes of Z/2 vector spaces. We are not assuming thesecomplexes are graded even though it would be easy to introduce the proper grading conventions.If f1 : A1 → A2 is a chain map, then we can construct the mapping cone of f1, denoted by(M(f1), ∂). This is the chain complex with chain group equal to A1 ⊕ A2 and differential definedby the matrix
∂ =(∂1 0f1 ∂2
)It is easy to check that ∂2 = 0.
Proposition 8.3. The obvious maps in the sequence
0 −→ A2ι−→M(f1) π−→ A1 −→ 0
are chain maps and this sequence is exact. Further, the connecting morphism in the associated longexact sequence is precisely f1.
Proof. The maps in the sequence are defined by ι(b) = (0, b) and π(a, b) = a, which clearly makesthe sequence exact. It is easy to see that these maps are also chain maps. For the second part ofthe proposition let us recall how the connecting morphism is constructed in general.
Suppose we have a short exact sequence of chain complexes
0 −→ (A, ∂A)f−→ (B, ∂B)
g−→ (C, ∂C) −→ 0
We define a map δ : H(C, ∂C)→ H(A, ∂A) in the following way. If c ∈ C such that ∂Cc = 0, thensince g is surjective we can find b ∈ B such that g(b) = c. But then 0 = ∂Cc = ∂Cg(b) = g(∂Bb),and since im f = ker g there is an element a ∈ A such that f(a) = ∂Bb. Finally we see that0 = ∂2
Bb = ∂Bf(a) = f(∂Aa), and since f is injective this implies that ∂Aa = 0. So, we define
104

δ([c]) = [a]. It is easy to see that this is a well defined map and gives us an exact sequence
H(A, ∂A)f∗ // H(B, ∂B)
g∗zzuuuuuuuuu
H(C, ∂C)δ
ddIIIIIIIII
Now applying this construction to our mapping cone short exact sequence we see that for a ∈ A1,δ([a]) is defined by finding an element (b, c) ∈M(f1) such that a = π(b, c) = b (so (a, 0) will do justfine), then finding an element d ∈ A2 such that (0, d) = ι(d) = ∂(a, 0) = (∂1a, f1(a)) = (0, f1(a))(so d = f1(a) will do just fine). Therefore δ([a]) = [f1(a)], and this proves the proposition.
Proposition 8.4. The mapping cone is functorial and satisfies a naturality condition. Specifically,if f1 : A1 → A2 and g1 : B1 → B2 are two chain maps between chain complexes, and we have mapsψ1, ψ2 such that the following diagram
A1f1 //
ψ1
A2
ψ2
B1 g1
// B2
(8.4)
commutes up to homotopy, then there is an induced map M(ψ1, ψ2) : M(f1) → M(g1). Further,the short exact sequences associated to the cones M(f1) and M(f2) fit into a commutative (up tohomotopy) diagram
0 // A2//
ψ2
M(f1) //
M(ψ1,ψ2)
A1//
ψ1
// 0
0 // B2// M(g1) // B1
// 0
Proof. We clearly want to define the induced mapM(ψ1, ψ2) byM(ψ1, ψ2)(a1, a2) = (ψ1(a1), ψ2(a2)).It is easy to see that this map has the necessary properties.
Proposition 8.5. Let (Ai, ∂i)i∈Z be a collection of chain complexes and let fi : Ai → Ai+1 be achain map for each i ∈ Z satisfying
1. The composition fi+1 fi is chain nullhomotopic via Hi : Ai → Ai+2
2. the map.ψi := fi+2 Hi +Hi+1 fi : Ai → Ai+3
is a quasi-isomorphism.
Then, H(M(fi)) ∼= H(Ai+2).
Proof. First we see that ψi is a chain map; that is, ∂i+3ψi = ψi∂i. Messing with the compositionswe easily see
ψi∂i = fi+2Hi∂i +Hi+1fi∂i
= fi+2∂i+2Hi + fi+2fi+2fi +Hi+1∂i+1fi
= ∂i+3fi+2Hi + ∂i+3Hi+1fi
= ∂i+3ψi
105

We define a map ϕi : M(fi) → Ai+2 by ϕi(a, b) = Hi(a) + fi+1(b) and a map ρi : Ai → M(fi+1)by ρi(ai) = (fi(ai), Hi(ai)). It is easy to check that these maps are chain maps, and we haveϕi+1 ρi = ψi. Consider the following diagram
Aifi //
=
Ai+1ιi+1 //
=
M(fi)πi+1 //
ϕi
Aifi //
ψi
Ai+1
ψi+1
Ai
fi //
ψi
Ai+1fi+1 //
ψi+1
Ai+2fi+2 //
ρi+2
Ai+3fi+3 //
=
Ai+4
=
Ai+3
fi+3 // Ai+4ιi+4 // M(fi+3)
πi+3 // Ai+3fi+3 // Ai+4
All the maps in this diagram are chain maps, and all but two squares are immediately seen tocommute. For the other two we can easily define chain homotopies between the two differentcompositions, so all the squares commute up to homotopy. If we pass two homology we see thatthe top and bottom rows are exact, and the compositions of the columns (except for the middlecomposition) are isomorphisms, so it follows by the five lemma that ρi+2ϕi is also an isomorphism.The fact that ϕiρi−1 = ψi−1 and ρi+2ϕi are quasi-isomorphisms implies that ϕi is an isomorphism,and hence ρi is also a quasi-isomorphism. Therefore H(M(fi)) ∼= H(Ai+2).
Back to the Surgery Exact Sequence
We will now see that proposition 8.5 implies the surgery exact sequence. To do this we takean infinite family of β,γ, δ curves, denoted by β(i),γ(i), δ(i), that are generic exact Hamiltonianperturbations of the β,γ, δ curves, and assume β(0) = β,γ(0) = γ,α(0) = α. Then let A3i =CF (α,β(i)), A3i+1 = CF (α,γ(i)) and A3i+2 = CF (α, δ(i)). Note that A3i, A3i+1, A3i+2 are theFloer complexes for Y, Y0 and Y1 respectively. We define the maps fi : Ai → Ai+1 by countingpseudoholomorphic triangles as before. The fact that f3i+1 f3i, f3i+2 f3i+1, f3i+3 f3i+2 are chainnull-homotopic comes from counting holomorphic rectangles, and the homotopies are given by
H3i := hαβ(i)γ(i)δ(i)(−⊗ Θβ(i)γ(i) ⊗ Θγ(i)δ(i))
H3i+1 := hαγ(i)δ(i)β(i+1)(−⊗ Θγ(i)δ(i) ⊗ Θδ(i)β(i+1))
H3i+2 := hαδ(i)β(i+1)γ(i+1)(−⊗ Θδ(i)β(i+1) ⊗ Θβ(i+1)γ(i+1))
So we need to verify the second hypothesis of proposition 8.5. First we show that Ai is quasi-isomorphic to Ai+3 via a “closest point” map.
Proposition 8.6. For a small perturbation β′ of the β curves let Θββ′ be the top-grading generatorof HF (β,β′). Then the chain map
f : CF (α,β) −→ CF (α,β′)
defined byξ 7→ fαββ′(ξ ⊗ Θββ′)
induces an isomorphism on homology.
106

Proof. We assume that the perturbation is taken so that βi and β′i intersect in a pair of cancelingpoints. The idea is to approximate f = fαββ′(−⊗ Θββ′) with a map that is clearly an isomorphism.To do this we introduce R-filtrations on CF (α,β) and CF (α,β′).
Let us fix an area for on Σ and an intersection point x0 ∈ Tα ∩ Tβ, and define
F : Tα ∩ Tβ −→ R
byF(x) = A(D(φ))− nz(φ) · A(Σ)
where φ ∈ π2(x,x0) and A(R) denotes the area of a region. This is clearly well-defined. Ifb1(Yαβ) > 0, then we need to require that A(P ) = 0 for any periodic domain, which is possiblyto find such an area form for any weakly admissible diagram. We can also assume that the signedbetween the curves βi and β′i is zero. For ξ, ξ′ ∈ CF (α,β) we will write ξ < ξ′ if
maxx∈Tα∩Tβ
x has non-zero coefficient in ξ
F(x) < maxx′∈Tα∩Tβ
x′ has non-zero coefficient in ξ′
F(x′)
We can repeat this construction to get a filtration on CF (α,β′) relative to a reference point x′0.If the β′i is sufficiently close to βi, then for each x ∈ Tα∩Tβ there is a unique closest intersection
point x′ ∈ Tα ∩ Tβ′ . This association sets up a bijection between the sets Tα ∩ Tβ and Tα ∩ Tβ′ ,which we can extend to a linear isomorphism
ι : CF (α,β) −→ CF (α,β′)
Of course this map is not necessarily a chain map, but we claim that the chain map f can bewritten as f = ι + `, where ` : CF (α,β) → CF (α,β′) is a linear map such that ` < ι. Since ι isan isomorphism, this implies that f is an isomorphism on the chain level, and since this map is achain map we have that the chain complexes CF (α,β) and CF (α,β′) are isomorphic.
There is a unique triangle ψ0 ∈ π2(x, Θββ′ , ι(x)) such that D(ψ0) ≥ 0 and is supported in theregion between βi and β′i. This triangle admits a unique holomorphic representative, so #M(ψ0) =0. We now define the map ` : CF (α,β)→ CF (α,β′) by
`(x) =∑ψ
#M(ψ) · ι(x)
where the sum is over all ψ ∈ π2(x, Θββ′ , ι(x)) such that nz(ψ) = 0 and D(ψ) 6= kD(ψ0) for someinteger k (i.e. ψ is not supported in the domain of ψ0. We clearly have f = ι+ `.
UNFINISHED
Proposition 8.6 gives us a quasi-isomorphism θi : Ai → Ai+3 obtained by counting triangles.We claim that θi is chain homotopic to fi+2 Hi +Hi+1 fi : Ai → Ai+3. Let us see this for i = 0,and the general situation will follow easily. Let us write β′ for the β(0) curves for what follows. Wehave the following maps
θ = fαββ′(−⊗ Θββ′) : CF (α,β)→ CF (α,β′)
f0 = fαβγ(−⊗ Θβγ) : CF (α,β)→ CF (α,γ)
f2 = fαδβ′(−⊗ Θδβ′) : CF (α, δ)→ CF (α,β′)
H0 = hαβγδ(−⊗ Θβγ ⊗ Θγδ) : CF (α, β)→ CF (α, δ)
H1 = hαγδβ′(−⊗ Θγδ ⊗ Θδβ′) : CF (α,γ)→ CF (α,β′)
107

We want to show that f2 H0 +H1 f0 is chain homotopic to θ0. This comes from the associativelaw for pseudoholomorphic rectangles. The associative law for rectangles states that for a Heegaardmulti-diagram (Σ,α,β,γ, δ,β′) the following map
G = hαγδβ′(fαβγ(−⊗−)⊗−⊗−) + fαδβ′(hαβγδ(−⊗−⊗−)⊗−)+hαβδβ′(−⊗ fβγδ(−⊗−)⊗−) + fαββ′(−⊗ hβγδβ′(−⊗−⊗−))+hαβγβ′(−⊗−⊗ fγδβ′(−⊗−))
(8.5)
is null-homotopic as a map
G : CF (α,β)⊗ CF (β,γ)⊗ CF (γ, δ)⊗ CF (δ,β′) −→ CF (α,β′)
The null-homotopy is given by counting pseudoholomorphic pentagons. In particular, for theHeegaard multi-diagram (Σ,α,β,γ, δ,β′) we define the map
Pαβγδβ′ : CF (α,β)⊗ CF (β,γ)⊗ CF (γ, δ)⊗ CF (δ,β′) −→ CF (α,β′)
by counting pseudoholomorphic pentagons
Pαβγδβ′(x⊗ y⊗ z⊗w) =∑
p∈Tα∩Tβ′
∑ϕ∈π2(x,y,z,w,p)
nz(ϕ)=0µ(ϕ)=0
#M(ϕ) · p
We claim that ∂ Pαβγδβ′ +Pαβγδβ′ ∂ is equal to the map G in (8.5). This follows from examiningthe ends of M(ϕ) for ϕ ∈ π2(x,y, z,w,p) and µ(ϕ) = 1. In particular there are two kinds ofdegenerations of a pentagon: a disc can break off from one of the five vertices making a pentagonspliced with a disc, or a triangle can break off from one of the vertices making a rectangle splicedwith a triangle.
We can now construct the chain homotopy between f2 H0 +H1 f0 and θ0. It is the map
K : CF (α,β) −→ CF (α,β′)
defined byK = Pαβγδβ′(−⊗ Θβγ ⊗ Θγδ ⊗ Θδβ′)
For ξ ∈ CF (α,β) we have
∂Pαβγδβ′(ξ ⊗ Θβγ ⊗ Θγδ ⊗ Θδβ′) + Pαβγδβ′(ξ ⊗ Θβγ ⊗ Θγδ ⊗ Θδβ′) = G(ξ ⊗ Θβγ ⊗ Θγδ ⊗ Θδβ′)
and by definition of G we have
G(ξ ⊗ Θβγ ⊗ Θγδ ⊗ Θδβ′) =hαγδβ′(fαβγ(ξ ⊗ Θβγ)⊗ Θγδ ⊗ Θδβ′) + fαδβ′(hαβγδ(ξ ⊗ Θβγ ⊗ Θγδ)⊗ Θδβ′)+
hαβδβ′(ξ ⊗ fβγδ(Θβγ ⊗ Θγδ)⊗ Θδβ′) + fαββ′(ξ ⊗ hβγδβ′(Θβγ ⊗ Θγδ ⊗ Θδβ′))+
hαβγβ′(ξ ⊗ Θβγ ⊗ fγδβ′(Θγδ ⊗ Θδβ′))
We can easily see that the first term in this expansion is precisely H1 f0(ξ), the second term isprecisely f2 H0(ξ), the third and fifth terms are zero, and finally we claim the fourth term isidentified with θ0(ξ). It clearly suffices to show that
hβγδβ′(Θβγ ⊗ Θγδ ⊗ Θδβ′) = Θββ′
This follows from a model calculation.
108

Proof of theorem 8.6. We now have all of the necessary machinery to prove the surgery exact se-quence. By proposition 8.5 we have that the chain complex M(f0) is quasi-isomorphic to A2. But,M(f0) = A0 ⊕A1 = CF (α,β)⊕ CF (α,γ) and A2 = CF (α, δ). The short exact sequence
0 −→ CF (α,γ) −→M(f0) −→ CF (α,β) −→ 0
leads to a long exact sequence
HF (α,γ) // H(M(f0))
zzuuuuuu
uuuu
HF (α,β)
ddIIIIIIIII
This is the surgery exact sequence.
Z/2-Gradings
We can introduce Z/2-gradings in CF (α,β) and the homology groups, and the surgery exactsequence is homogenous with respect to these gradings.
A Few Simple Applications
8.4 The Absolute Q Grading
If Y is a rational homology sphere, then the relative Z grading on HF (Y ) can be lifted to anabsolute Q grading. Let W be the cobordism from S3 to Y by adding m 2-handles to D4.
UNFINISHED
8.5 Heegaard Floer Knot Homology
The Construction
We can also construct an invariant of knots in 3-manifolds from Heegaard Floer homology. Let kbe a knot in a closed, oriented 3-manifold Y . First we need to come up with a Heegaard diagramfor Y that somehow encodes information about our knot k. To do this let us first fix a Heegaarddiagram (Σ,α,β0) for the knot complement Y \νk, where α is a g-tuple of curves and β0 is a(g − 1)-tuple of curves. If µ ⊂ ∂νk is a meridian of k, then (Σ,α,β) is a Heegaard diagram for Y ,where β = β0 ∪ µ. Let us place to base points z, w ∈ Σ very close to µ, but on opposite sides,and away from the rest of the α and β curves. We can connect w to z with a small arc δ1 thatcrosses µ transversally in one point, and we can connect z to w with an arc δ2 supported in thecomplement of the α curves in Σ (which is topologically just a disc). Then the curve δ1 ∪ δ2 (as itsits in S3) is ambiently isotopic to k, and if k is oriented it will inherit an orientation.
We will use the base point w to define the regular Floer chain complex CF (α,β, w) (i.e. thedifferential counts discs that miss w × Symg−1(Σ)), whose homology we know consists of a singlecopy of Z/2. Recall that we can lift the relative grading on these Floer chain groups to absolutegradings on homology. In this absolutely graded theory, the Floer homology of S3 is supported indegree 0 and the Floer homology of S1 × S2 is supported in degrees ±1
2 . Let CF i(α,β, w) denotethe subgroup of CF (α,β, w) generated by homogeneous elements of CF (α,β, w) of degree i.
109

Next, we use the base point z to define a filtration on the graded group CF (α,β, w). Definethe function F : (Tα ∩ Tβ)2 → Z acting on x,y ∈ Tα ∩ Tβ by
F(x,y) = nz(φ)− nw(φ)
for any disc φ ∈ π2(x,y). This function can be lifted to a unique function F : Tα ∩ Tβ → Z withthe following two properties:
1. F(x,y) = F(x)−F(y)
2. # x ∈ Tα ∩ Tβ : F(x) = i ≡ # x ∈ Tα ∩ Tβ : F(x) = −i mod 2
Finally we define the filtration F∗ on CF (α,β, w) by letting F jCF (α,β, w) ⊆ CF (α,β, w) be thesubgroup generated by x with F(x) ≤ j. This filtration has the following nice properties:
1. The filtration is decreasing: F jCF (α,β, w) ⊆ F j+1CF (α,β, w).
2. F∗ is bounded: for large enough j we have F jCF (α,β, w) = CF (α,β, w) and for smallenough j we have F jCF (α,β, w) = 0.
3. The filtration respects the absolute grading: F jCF i(α,β, w) ⊆ CF i(α,β, w).
4. The differential ∂ : CF (α,β, w)→ CF (α,β, w) respects the filtration: ∂(F jCF (α,β, w)
)⊆
F jCF (α,β, w).
All of this information implies numerous things. First of all, we can construct the associatedbigraded vector space
CFKi(α,β, z, w, j) := F jCF i(α,β, w)/F j−1CF i(α,β, w)
The differential on CF ∗(α,β, w) descends to a differential on CFK∗(α,β, z, w, ∗), and so we candefine the homology of this complex, which is a bigraded vector space HFK∗(α,β, z, w, ∗). Fur-ther, by the fundamental theorem of spectral sequences, we have that there is a spectral sequenceErp,q, dr
of homological type with E2 = HFK(α,β, z, w) and converging to E∞ = HF (S3).
It turns out this entire spectral sequence is an invariant of the knot, and will be useful later fordefining additional scalar invariants.
This bigraded homology group turns out to be a topological invariant of the knot k, and so wewrite HFKi(Y, k, j) to denote the homology groups.
Proposition 8.7. If (Σ,α,β0, µ) and (Σ′,α′,β′0, µ′) represent the same knot complement, then
one representation can be obtained from the other via a finite sequence of the following moves (andtheir inverses):
1. Handle slides and isotopies amongst the α or β0.
2. Isotopy of µ.
3. Handle slides of µ across the β0 curves.
4. Stabilizations.
Proof.
110

Theorem 8.7. For an oriented knot k in S3 with compatible Heegaard diagram (Σ,α,β, z, w), thefiltered chain homotopy type of CFK(α,β0, z, w) is a topological invariant of k, i.e. it does notdepend on the choice of Heegaard diagram and complex structures used in its construction.
Proof. We proceed like in the proof of invariance of HF , except now we have to make sure thatall of our maps respect the filtration on CFK. First consider a perturbation of the path of nearly-symmetric, almost complex structures Js,0 and Js,1. Early we defined a continuation map ΦJs,t :(CF (α,β), ∂Js,0) → (CF (α,β), ∂s,1) by counting time-dependent pseudoholomorphic discs. Sincethe filtrations on both of these complexes are precisely the same ....
ΦJs,t(x) =∑
y∈Tα∩Tβ
∑φ∈π2(x,y)µ(φ)=0nz(φ)=0
#MJs,t(φ) · y
UNFINISHED
Extension to Links
Now we explain how to extend the above construction to links. Let L be an m-component link in Y ,and let pi, qim−1
i=1 be a set of points in L such that if we identify pi with qi in L we get a connectedgraph. We can think of these points as (m− 1)-embedded 0-spheres. Let W be any null-cobordismof Y , and let κ(Y ) be the boundary of the 4-manifold obtained by attaching (m − 1) 1-handleswhose attaching spheres are precisely pi, qi. Clearly κ(Y ) is diffeomorphic to Y#(m− 1)S1×S2.Then we can connect (m − 1) bands to L in κ(Y ) that start at pi, end at qi and run through thecore of the i-th 1-handle, thus obtaining a knot κ(L) in κ(Y ). The isotopy class of this knot inκ(Y ) depends only on the isotopy class of L in Y .
We now define the Floer homology of a link L in Y as the Floer homology of κ(L) in κ(Y ), i.e.HFK(Y, L) := HFK(κ(Y ), κ(L)). In order to get absolute gradings in HFK for a link, recall thefollowing absolute grading of the Floer homology of #mS1 × S2 (with i ∈ Z):
HF i(#mS1 × S2) =
(Z/2)(
mi+m/2) m even and −m/2 ≤ i ≤ m/2
(Z/2)(m
i+m/2−1/2) m odd and −m/2 ≤ i− 12 ≤ m/2
0 otherwise
That is, the Floer homology of #mS1×S2 is the homology of the m-torus Tm with gradings shiftedso that the homology is symmetric with respect to grading 0.
Exact Sequences for HFK
We can use the surgery exact sequence discussed from theorem 8.6 to derive exact sequences forthe knot homology invariant. Fix an oriented knot k in S3, and let γ be a knot in S3 disjoint fromk such that lk(k, γ) = 0. The surgery exact sequence provides us with maps
F : HF (S3)→ HF (S30(γ))
F0 : HF (S30(γ))→ HF (S3
1(γ))
F1 : HF (S31(γ))→ HF (S3)
111

that fit into an exact triangle. Further, the map F0 and F1 are homogenous maps of degree −1/2,whereas the map F is a sum of homogenous maps which do not increase the grading. It can beshown that the chain maps on CF that induce the above maps respect the filtrations on CF , andhence the surgery exact sequence passes to an exact sequence in knot Floer homology:
HFK(S30(γ), k)
bF0 // HFK(S31(γ), k)
bF1xxppppppppppp
HFK(S3, k)
bFffNNNNNNNNNNN
Example 8.3. We can use the above surgery sequence for knot Floer homology to make some simplecomputations. Let B be the Borromean link in S3, and let B(m,n) be the knot in L(m, 1)#L(n, 1)obtained as one of the components of B after doing surgery on the other two components withframing m and n. For example, B(m,∞) is the unknot in L(m, 1) for any m, and B(1, 1) is theright-handed trefoil in S3. We will compute later that the knot Floer homology of the right-handedtrefoil is precisely
HFKi(S3, B(1, 1), j) =
Z/2 (i, j) = (−2,−1), (−1, 0), (0, 1)0 otherwise
Now we will compute HFK(S1 × S2, B(0, 1)). UNFINISHED
For an oriented link L in S3, let L+, L−, L0 denote the oriented links that are the same asL except in the vicinity of a crossing, in which case L+, L−, L0 have that crossing changed to apositive, negative or oriented smoothing, respectively. If L has m components, then L+ and L−will also have m components, but L0 will have m+ 1 components. In order to talk about the Floerhomology of the links L+ and L− we look at their associated knots in the space #(m− 1)S1 × S2,whereas the associated knot of the link L0 lives in #mS1 × S2. Let γ be an unknot placed arounda crossing of L such that L intersects the spanning disc of γ in a pair of canceling points, and bothstrands at this crossing belong to the same link component. The link L− sitting inside the spaceS3
1(γ) is isotopic to L+ sitting in S3. We claim that L− sitting in S30(γ) ∼= S1 × S2 is isotopic to
the link in S1 × S2 obtained by attaching a 1-handle to S3 near the smoothing in L0, and thenconnecting the two components of L0 near the smoothing with a compatibly oriented band goingthrough the 1-handle.
An Euler Characteristic Calculation
The skein exact sequences for Floer knot homology allow us to compute the Euler characteristic ofHFK∗∗, and compare it to a classical knot invariant.
Getting Heegaard Diagrams for a Certain Class of Knots
We will now explain how to genus 1 Heegaard diagrams for 2-bridge knots, and see that their Floerhomology can be computed combinatorially. A 2-bridge knot is a knot k i S3 such that there is aheight function f : S3 → R such that f |k has precisely two maxima.
112

x1
x2 x3
z
w
x1
x2 x3
β
α
Figure 8.1: A Heegaard diagram for the trefoil knot
The Trefoil Knot
Figure 8.1 shows a Heegaard diagram for S3 that is compatible with the left-handed trefoil. Theintersection points of the α and β curves are labelled x1, x2 and x3. Let us figure out the relativegrading of these generators, computed with respect to the base point w. For gr(x1, x2) note that wehave the obvious disc φ12 which does not intersect w and has a unique holomorphic representative(up to translation), hence gr(x1, x2) = 1. For gr(x2, x3) we also have the obvious disc φ23, butnow the orientations are reversed, so µ(φ23) = −1, and this disc intersects w negatively, hencegr(x2, x3) = −1 − 2(−1) = +1. By additivity of gradings we have gr(x1, x3) = 2, hence thegradings of the generators differ by one with x1 in the top grading and x3 in the bottom grading.To pin down the translation indeterminacy of this grading we compute the homology of the complex(CF (αβ,w), which we know is Z/2 supported in grading zero. In ∂x1 we clearly have the coefficientof x2 is one (we do not need to consider x3 since its grading is too low and ∂ lowers gradings byonly one). Next we have ∂x2 = 0 since the disc connecting x2 to x3 does not support a holomorphicrepresentative. Finally we have ∂x3 = 0 since x3 in the lowest grading. We have now computedker ∂ = 〈x2, x3〉 and im ∂ 〈x2〉, hence HF (α,β) = 〈x3〉, which implies gr(x1) = 2, gr(x2) = 1 andgr(x3) = 0.
Now let us compute the relative Alexander gradings. Recall that this is defined by f(x,y) =nz(φ) − nw(φ). For the disc φ12 connecting x1 to x2 we clearly have f(x1, x2) = 1. The discφ23 connecting x2 to x3 intersects w negatively, hence f(x2, x3) = 1. And by additivity of thisgrading we have f(x1, x3) = 2. The symmetry property this grading is supposed to have impliesthat f(x1) = 1, f(x2) = 0, f(x3) = −1. Finally, we compute the homology of (CFK(α, β, z, w), ∂k).However, none of the discs connecting the intersection points miss the points z and w, hence thedifferentials are zero. Therefore HFK(α, β, z, w) = 〈x1, x2, x3〉, and the gradings look like
HFKij −1 0 12 〈x1〉1 〈x2〉0 〈x3〉
It is clear that the Euler characteristic of this bigraded vector space is just the Alexander polyno-mial: ∆k(t) = t−1 − 1 + t.
113

x1
α
β
x2 x3
x4
x5
x2 x3 x5x1
z
w
x4
Figure 8.2: A Heegaard diagram for the figure eight knot
The Figure Eight Knot
Figure 8.2 shows a Heegaard diagram for S3 that is compatible with the figure eight knot. Let usfirst figure out the relative gradings on these generators with respect to the base point w. Thereis a disc connecting x1 to x2 and it intersects w positively, so gr(x1, x2) = −1. The obvious discconnecting x2 to x3 does not intersect w, and so gr(x2, x3) = 1. The obvious disc connecting x3
to x4 has orientations reversed, and so its Maslov index is −1 and intersects w negatively, hencegr(x3, x4) = 1. Finally, the disc from x4 to x5 has orientations reversed and does not intersect w, sogr(x4, x5) = −1. To pin down the absolute grading we compute the homology of (CF (α, β, w), ∂).The differentials can easily be computed as
∂x1 = x4
∂x2 = x3
∂x3 = 0∂x4 = 0∂x5 = x5
Therefore ker ∂ = 〈x3, x4, x1 + x5〉 and im ∂ 〈x3, x4〉, hence HF (α, β, w) = 〈x1 + x5〉. This meansthat x1 and x5 are in grading zero, and so gr(x2) = 1, gr(x3) = 0 and gr(x4) = −1.
Next we compute the relative Alexander gradings. If we just use the discs we used in computingthe Maslov grading then we see that the relative Alexander gradings are the same as the relativeMaslov gradings. In order for the symmetry property to hold for the maslov gradings we musthave f(x1) = f(x3) = f(x5) = 0, f(x2) = 1 and f(x4), hence the Alexander gradings are preciselythe Maslov gradings. Further, the differential ∂k on CFK(α, β, z, w) is zero, so we have computedHFK:
HFKij −1 0 11 〈x2〉0 〈x1, x3, x5〉−1 〈x4〉
It is clear that the Euler characteristic of this bigraded vector space is the Alexander polynomialof the figure eight: ∆k(t) = t−1 − 3 + t.
114

x1
α
β
x2 x3
x4
x5 x6 x7
x2 x3 x5 x6 x7x1
z
w
x4
Figure 8.3: A Heegaard diagram for the knot 52
A Knot with 5 Crossings
Figure 8.3 shows a Heegaard diagram for S3 that is compatible with the 52 knot (a figure eightknot with an extra twist). Let us first figure out the relative gradings on these generators withrespect to the base point w. There is a disc connecting x1 to x2 that does not intersect w, so wehave gr(x1, x2) = 1, and similarly gr(x2, x3) = 1. However, the disc connecting x3 to x4 passesthrough w positively, and so gr(x3, x4) = −1. Continuing this we can easily compute
gr(x1, x2) = 1 gr(x2, x3) = 1 gr(x3, x4) = −1gr(x4, x5) = −1 gr(x5, x6) = 1 gr(x6, x7) = 1
Next we compute the homology of (CF (α, β, w), ∂) so that we can figure out the absolute gradingsof our generators. We can compute the differentials to be:
∂x1 = x2 + x4 + x6
∂x2 = x3
∂x3 = 0∂x4 = x3 + x7
∂x5 = x2 + x4 + x6
∂x6 = x7
∂x7 = 0
It is easy to see that the kernel of ∂ is 4 dimensional, generated by x3, x7, x1 +x5, x2 +x4 +x6, whileits image is 3 dimensional, generated by x3, x7, x2 + x4 + x6. Therefore HF (α, β, w) is generatedby x1 +x5, and so has absolute grading 0. As a consequence we have gr(x1) = gr(x5) = 0, gr(x2) =gr(x4) = gr(x6) = −1 and gr(x3) = gr(x7) = −2.
Now let us compute the Alexander gradings. We can use the same discs we used to computethe Maslov gradings. In particular, the disc from x1 to x2 intersects z positively but misses w,hence f(x1, x2) = 1, and similarly f(x2, x3) = 1. The disc from x3 to x4 intersects w positively,but misses z, hence f(x3, x4) = −1. The disc from x4 to x5 intersects z negative and misses w,so f(x4, x5) = −1. The disc from x5 to x6 intersects w negatively and misses z, so f(x5, x6) = 1.Finally, the disc from x6 to x7 intersects z positively, and so f(x6, x7) = 1. So, the relativeAlexander gradings are equal to the relative Maslov gradings:
f(x1, x2) = 1 f(x2, x3) = 1 f(x3, x4) = −1f(x4, x5) = −1 f(x5, x6) = 1 f(x6, x7) = 1
115

In particular, x1, x5 are in the same grading, x2, x4, x6 are in the same grading, and x3, x7 arein the same grading. By the symmetry property of the Alexander grading we are forced to havef(x1) = f(x5) = 1, f(x2) = f(x4) = f(x6) = 0 and f(x3) = f(x7) = −1. Further, the differential∂k on CFK(α, β, z, w) is trivial since all discs intersect either z or w, and so we have computedHFK:
HFKij −1 0 10 〈x1, x5〉−1 〈x2, x4, x6〉−2 〈x3, x7〉
It is clear that the Euler characteristic of this bigraded vector space is the Alexander polynomialof the 52 knot: ∆k(t) = 2t−1 − 3 + 2t.
UNFINISHED
116

A Homotopy Groups
Let us assume that we are working in the “nice” category of Hausdorff, compactly generated, non-degenerately based spaces. For based spaces (X,x0) and (Y, y0), let f1, f2 : X → Y be maps (notnecessarily based) and u : I → Y a path. We say that f1 and f2 are freely homotopic along uif there is a homotopy F : X × I → Y from f1 to f2 such that F (x0, t) = u(t) for all t ∈ I, and wedenote this by f1 ∼
uf2. That is, although we are allowing the base point of X to move during the
homotopy, we are restricting it to move along a specific path. If f1 and f2 are based maps, then uis necessarily a loop. Here is a simple lemma to show this definition makes sense.
Lemma A.1.
1. For any map f1 : X → Y and path u : (I, 0) → (Y, f1(x0)) there is a map f2 : X → Y suchthat f1 ∼
uf2.
2. If f1 ∼uf2, f1 ∼
vf3 and u ∼ v rel 0, 1, then f1 ∼
constf3.
3. If f1 ∼uf2 and f2 ∼
vf3, then f1 ∼
v∗uf3.
Proof.
1. By definition of non-degenerately based we have that (X,x0) is a fibration. Therefore thehomotopy extension problem f1 ∪ u : X × 0 ∪ x0 × I → Y can be solved to give a mapF : X × I → Y with the desired properties.
2.
This lemma gives us an action of π1(Y, y0) on the based homotopy classes [X,Y ]∗: for [f ] ∈[X,Y ]∗ and [u] ∈ π1(Y, y0), let [u]·[f ] = [g], where g is any map such that f ∼
ug. This is well-defined
by the above lemma.
Proposition A.1. If Y is path connected, then the forgetful map [X,Y ]∗ → [X,Y ] descends to abijection [X,Y ]∗/π1(Y, y0)→ [X,Y ]. If Y is simply connected, then the forgetful map is bijective.
117

B Duality Theorems
Theorem B.1 (Poincare Duality). If M a closed, oriented n-manifold with fundamental class[M ] ∈ Hn(M ; Z), then the homomorphism
PD : Hp(M ; Z)→ Hn−p(M ; Z)
defined by α 7→ α a [M ] is an isomorphism.
This isomorphism is called the Poincare isomorphism. It is natural in the sense that iff : M → N is a map of closed, oriented manifolds such that f∗[M ] = [N ], then the followingdiagram commutes
Hp(M ; Z) PD // Hn−p(M ; Z)
f∗
Hp(N ; Z)
PD//
f∗
OO
Hn−p(N ; Z)
The duality isomorphism leads to a bilinear pairing
Hp(M ; Z)⊗Hn−p(M ; Z)→ Z
which is non-degenerateWe can drop the orientability assumption and get a Z/2-form of Poincare duality.
Theorem B.2. If M is a closed n-manifold with a Z/2-orientation given by [M ] ∈ Hn(M ; Z/2),then the homomorphism
PD : Hp(M ; Z/2)→ Hn−p(M ; Z/2)
defined by α 7→ α a [M ] is an isomorphism.
We can also extend these duality theorems to manifolds with boundary.
Theorem B.3 (Poincare-Lefschetz Duality). Let M be a compact, oriented n-manifold with bound-ary with fundamental class [M,∂M ] ∈ Hn(M,∂M ; Z). Then the homomorphisms
PD : Hp(M,∂M ; Z)→ Hn−p(M ; Z)
PD : Hp(M ; Z)→ Hn−p(M,∂M ; Z)
given by capping homology classes with [M,∂M ] are isomorphisms.
Finally, a more general form of duality is Alexander duality.
Theorem B.4 (Alexander Duality). Let X be a closed subset of Sn which is a CW complex. Then
H i(Sn\X) ∼= Hn−i−1(X)
118

C Cohomology with Homotopy
There is a way of dealing with cohomology classes in terms of homotopy classes of maps. Recallthat an Eilenberg-MacLane space of type (G,n) (where G is abelian if G ≥ 2) is a CW-complexK(G,n) such that πi(K(G,n)) = G if i = n and 0 otherwise. Hurewicz’s theorem implies thatHi(K(G,n)) = 0 for all i < n and Hn(K(G,n)) = G, and so the exact sequence from the universalcoefficient theorem gives a natural isomorphism
Hn(K(G,n);G) ∼= Hom(Hn(K(G,n)), G) ∼= Hom(G,G)
Let ι ∈ Hn(K(G,n);G) denote the cohomology class associated to id : G → G in the aboveisomorphisms. Then each homotopy class of map f : X → K(G,n) gives a cohomology classf∗ι ∈ Hn(X;G). This association turns out to be a natural isomorphism of abelian groups
[X,K(G,n)] ∼= Hn(X;G)
where [X,K(G,n)] is given the canonical group structure from the H-group structure on K(G,n) =ΩK(G,n − 1). Naturality of the isomorphism means that for any map f : X → Y the followingdiagram commutes
[X,K(G,n)]
∼=
[Y,K(G,n)]
∼=
f∗oo
Hn(X;G) Hn(Y ;G)f∗
oo
where f∗ denotes the induced map both on the homotopy class of maps and on cohomology.In the special case of n = 2 and G = Z we get another view of cohomology. The 2nd degree co-
homology H2(X; Z) is isomorphic to [X,K(Z)] = [X,CP∞]. But, at the same time, the classifyingspace of U(1) is BU(1) = CP∞, and so [X,CP∞] is in one-to-one correspondence with complexline bundles over X. So each cohomology class α ∈ H2(X; Z) corresponds to a complex line bundleLα → X.
119

D Homeomorphisms of Surfaces
When constructing combinatorial pictures of 3-manifolds it will be useful to know something aboutself-homeomorphisms of surfaces. We will be gluing together manifolds with boundary equal to asurface of genus g along a self-homeomorphism of that surface, so in particular we only need toknow self-homeomorphisms of surfaces up to isotopy. This motivates the definition of the mappingclass group. For any manifold M , let Homeo(M) denote the group of orientation preserving, self-homeomorphisms of M , and let Homeo0(M) denote the normal subgroup of Homeo(M) that areisotopic to the identity. The quotient H(M) = Homeo(M)/Homeo0(M) is called the mapping classgroup of M .
The structure of H(M) is usually quite complicated, but in the case of the torus we have asimple description of its mapping class group, and for a general surface we have an explicit set ofgenerators. Let Σ be a surface of genus g, and let c be an embedded circle in Σ. Associated to thiscurve there are 2 elements of H(Σ), which are inverses of each other, called the Dehn twists along c.Take a small tubular neighborhood N(c) of c in Σ. Since N(c) is an annulus, let ϕ : N(c)→ A bea homeomorphism onto the standard annulus A = z : 1 ≤ |z| ≤ 2 such that ϕ(c) = z : |z| = 2.Then define the homeomorphism τc : Σ→ Σ by
τ(x) =
x x /∈ N(c)ϕ−1
(ϕ(x) · e2πi(|ϕ(x)|−1)
)x ∈ N(c)
This determines an element of H(Σ), and had we twisted in the other direction we would havegotten the inverse to the above element. Further Dehn twists around isotopic curves are isotopic.
There is a standard family of 3g embedded curves on a surface Σ of genus g, label them byαi, βi, γj for i = 1, . . . , g and j = 1, . . . , g − 1.
Theorem D.1 (Dehn-Lickorish). The group H(M) is generated by Dehn twists along the curvesαi, βi, γi.
Theorem D.1 gives us an explicit description of the mapping class group of the torus. LetT = S1 × S1 be the 2-torus. Let µ = S1 × 1 and λ = 1 × S1 be the standard meridian andlongitude on T . A homeomorphism f : T → T induces an isomorphism f∗ : π1(T )→ π1(T ), whereπ1(T ) = Z⊕Z is generated by µ and λ. Every automorphism of Z⊕Z is given by an integer-valuedmatrix whose determinant is ±1. If f is orientation preserving, then the matrix representation off∗ has determinant +1. Further, isotopic homeomorphisms induce the same map on homology,hence we have a homomorphism
Φ : H(T ) −→ SL(2,Z) (D.1)
Proposition D.1. The map Φ is an isomorphism.
Proof. We will only show the surjective part of this proposition. Any matrix A ∈ SL(2,Z) can bereduced to the identity by composing with elementary transformations. Over the integers thesetransformations are of the form (
1 ±10 1
) (1 0±1 1
)Under the isomorphism (D.1) these matrices correspond to Dehn twists around µ and λ, which weknow generates H(T ) by theorem D.1. Therefore Φ is surjective.
120

E Some Analysis
Let V and W be Banach spaces and f : V →W a map. We say that f is a differentiable at a pointv ∈ V if there is a bounded linear map dfv : V →W such that
limh→0
||f(v + h)− f(v)− dfv(h)||||h|| = 0
We call dfv the derivative of f at v. If dfv exists for all v ∈ V we obtain a map df : V → L(V,W ),where L(V,W ) is the Banach space of bounded linear maps V → W given the operator norm: forL ∈ L(V,W ) we set ||L|| = sup ||L(v)|| : v ∈ V, ||v|| ≤ 1. Since L(V,W ) is another Banach spacewe can discuss the differentiable properties of df . In general, we say that f is of class C1 if f isdifferentiable and df is continuous (i.e. bounded), and inductively say that f is of class Ck if df isof class Ck−1.
A Ck Banach manifold modeled on a Banach space V is a topological space X with a coverUα and collection of charts xα : Uα → E which are bijections onto the open set xα(Uα) such thatfor any two charts (xα, Uα) and (xβ, Uβ) we have that xβ x−1
α : xα(Uα ∩ Uβ) → xβ(Uα ∩ xβ) isCk as a map between open sets of the Banach space E. If we speak of just Banach manifolds, andleave out its Ck class, then we take the manifold to be C∞. We can develop the notions of tangentvectors and differentials in the same way as finite dimensional manifolds.
Theorem E.1 (Implicit Function Theorem). Let f : X → Y be a Ck map between Banach man-ifolds. If y ∈ Y is a regular value, then f−1(y) is a Ck submanifold of X and Txf
−1(y) = ker dfxfor all x ∈ f−1(y).
A linear map T : V → W between Banach spaces is said to be Fredholm if the kernel andcokernel of T are finite dimensional, and the image of T is closed in W . Such maps are ourbest chance at transferring problems in the infinite dimensional setting to the finite dimensionalworld. The index of a Fredholm operator is defined to be ind(T ) = dim kerT − dim cokerT .The space of Fredholm operators F (V,W ) forms an open set in L(V,W ), and the index functionind : F (V,W )→ Z is locally constant.
Let X be a topological space and P (x) a statement which evaluates to true or false for eachx ∈ X. We say that P (x) is true for generic x ∈ X if the solution set x ∈ X : P (x) contains acountable intersection of open dense sets. The infinite dimensional version of Sard’s theorem cannow be stated.
Theorem E.2 (Sard-Smale). Let X and Y be separable Banach manifolds. Let f : X → Y be aCk map such that dfx : TxX → Tf(x)Y is Fredholm of index l for all x ∈ X. Assume k ≥ 1 andk ≥ l + 1. Then a generic y ∈ Y is a regular value of f , i.e. dfx is onto for all x ∈ f−1(y).
LetX be a Banach manifold modeled on V and E another Banach manifold. A smooth surjectivemap π : E → X of Banach manifolds is said to be a Banach W -bundle (with W a Banach space) ifX is equipped with a covering Uα and smooth charts ϕα : π−1(Uα)→ Uα×Uα×W such that forany two ϕα, ϕβ we have ϕβϕβ : (Uα∩Uβ)×W → (Uα∩Uβ)×W is of the form (p, w) 7→ (p, g(p)(w)),where g : Uα∩Uβ → GL(W ) is smooth (here GL(W ) is the group of topological linear isomorphismsW → W ). This implies that each fiber Ex := π−1(x) has the structure of a Banach space, whichis isomorphic to W but not in any canonical way. We denote the zero section (i.e. all of the zerovectors) of E by 0E .
Let π : E → X be a Banach W -bundle, and let us write the elements of E as pairs (x, e) ∈ X×Ewhere π(e) = x. The tangent space of E at a point (x, 0) in the zero section naturally splits as
T(x,0)E = TxX ⊕ Ex
121

For a point x ∈ X let πx : T(x,0)E → Ex be the projection onto the second factor. If s : X → Eis a section (π s = id) and let x ∈ X be a point such that s(x) = 0. Then using the naturalidentification above we define the vertical part of the differential ds to be the composition Dsx :=πx dsx : TxX → Ex (we use a capital D for the vertical differential and a lower case d for theregular differential). The following result is very useful.
Theorem E.3. Let X and Y be separable Banach manifolds, E → X × Y a Banach bundle, ands : X × Y → E a smooth section. If for each (x, y) ∈ s−1(0E) we have
1. The vertical differential Ds(x,y) : T(x,y)(X × Y )→ E(x,y) is surjective.
2. The vertical differential Ds(x,y) restricted to TyY is Fredholm of index k.
Then for generic x ∈ Y , the set y ∈ Y : s(x, y) = 0 is a k-dimensional submanifold of Y . Further,the restriction of Ds(x,y) to TyY is surjective.
Proof. By the first condition on s we already have that s−1(0E) is a Banach submanifold of X ×Yby the inverse function theorem. Let π : X × Y → X be the projection onto the first factor.Let (x, y) ∈ X × Y such that s(x, y) = 0. Then, as we remarked before, the tangent space at(x, y, 0) in E splits as T(x,y,0)E = TxX ⊕ TyY ⊕ E(x,y), and so the vertical differential is given byDs(x,y) = π(x,y) ds(x,y), where π(x,y) is the projection of T(x,y,0) onto E(x,y).
UNFINISHED
For a region U ⊆ Rn we define Lp(U) to be the space of functions f : U → R such that
||f ||p :=(∫
U|f |p
)1/p
<∞
If f ∈ Lp([a, b]) we say that g ∈ Lp([a, b]) is the weak derivative of f if for every φ ∈ C1([a, b])with φ(a) = φ(b) = 0 we have ∫ b
afφ′ = −
∫ b
agφ
More generally, if f ∈ Lp(U) and α is a multi-index, then we say that g ∈ Lp(U) is the α-th weakderivative of f if for every φ ∈ C1
c (U) we have∫UfDαφ = (−1)|α|
∫Ugφ
where Dα = ∂|α|
∂xα1 ···∂xαk is the α-th differential operator. Weak derivatives are unique (up to aset of measure zero), and if a function is already differentiable then its weak derivative is equalto its regular derivative. Therefore we also denote the weak derivative by Dαf , or just f ′ forU ⊂ R. We can further generalize this ideal to functions in Lp(U,Rn) by defining weak derivativesfor each component. The subset of Lp(U,Rn) with k weak derivatives in Lp(U,Rn) is denoted byW k,p(U,Rn).
Proposition E.1. If f ∈W 1,2(U,Rn) (U ⊆ R) such that f ′ is continuous, then f ∈ C1(U).
122

Proof. For a fixed a ∈ U define g : U → Rn by
g(x) =∫ x
af ′(t) dt
Since f ′ is continuous we have that g is C1. But, then g′ = f ′ and so g = f almost everywhere.Since W 1,2 embeds into C0 we have that f is continuous, hence g = f everywhere, and so f isC1.
(todo: Sobolev norms, completions and embeddings)
Lemma E.1. Let X,Y, Z be Banach spaces, D : X → Y a bounded linear operator and K : X → Za compact linear operator. If there is a constant C > 0 such that
||x||X ≤ C (||Dx||Y + ||Kx||Z)
for all x ∈ X, then D has closed range and finite dimensional kernel.
Proof.
123

F Some Exercises
Exercise F.1. Let k1, k2 be oriented, disjoint knots in S3. The four definitions of lk(k1, k2)presented in these notes are equivalent.
Solution.
1. Let µ1 be a meridian of k1 and F2 be an oriented Seifert surface of k2. Perturb F2 slightly, ifnecessary, so that k1 and F2 intersect transversally in the interior of F2. We claim that theinteger L such that [k2] = L[µ1] is precisely k1 · F2.
Exercise F.2. If k denotes the mirror of k, then ∆k(t) = ∆k(t).
Solution. Suppose k is the reflection of k through a plane Π in R3. If F is a Seifert surface ofk, then let F denote the Seifert surface of k obtained by reflecting through Π. If x1, . . . , x2g aregenerators for H1(F ), then let x1, . . . , x2g denote their reflections, and these generate H1(F ). Wehave the relation
lk(xi, x+j ) = − lk(xi, x+
j )
therefore S = −S. So,
∆k(t) = det(t1/2S − t−1/2ST ) = det(−(t1/2S − t−1/2ST )) = ∆k(t)
Exercise F.3. ∆k1#k2(t) = ∆k1(t) ·∆k2(t)
Proof. If F1, F2 are Seifert surfaces for k1, k2 respectively, then F1]F2 is a Seifert surface for k1#k2.We clearly have H1(F1]F2) ∼= H1(F1) ⊕ H1(F2), so if we pick bases α = x1, . . . , x2g and β =y1, . . . , y2g for H1(F1) and H1(F2) we can take their union to get a basis for H1(F1]F2). Further,the push-offs of the α basis elements do not link the the β elements, and vice-versa, so the Seifertmatrix S with respect to this basis is S1 ⊕ S2, where Si is the Seifert matrix of Fi. Therefore∆k1#k2(t) = ∆k1(t) ·∆k2(t).
Exercise F.4. If k is a knot then ∆k(1) = 1, and if L is a link with more than one componentthen ∆L(1) = 0.
Proof. If S is a Seifert matrix of some Seifert surface of k with respect to some basis, then ∆k(1) =det(S − ST ). The (i, j)-entry of S − ST is lk(xi, x+
j )− lk(xj , x+i ) = lk(xi, x+
j ) + lk(xi, x−j ) = xi · xj .So, S−ST is the matrix of the intersection pairing · : H1(F )⊗H1(F )→ Z in the basis xi, which
we know is a non-degenerate, anti-symmetric form, and so it is a direct sum of matrices(
0 1−1 0
)in some basis. The determinant of this matrix is clearly 1, and so it follows ∆k(1) = 1.
We can repeat the same arguments for a link L with more than one component, except now weclaim the intersection pairing · : H1(F ) ⊗ H1(F ) → Z is degenerate. If F is a Seifert surface forL, then there is a non-trivial 1-cycle α going once around one of the boundary components of F(since ∂L has more than one connected components). However, every embedded curve in F can beisotoped to completely miss the boundary of F , hence the intersection product of α with any othercycle is zero, hence the intersection pairing is degenerate. It follows that so the determinant of anymatrix representation is 0, hence ∆L(t) = 0.
124

Exercise F.5. The Alexander polynomial is zero for any split link.
Proof. If k1 and k2 are knots in S3 that can be separated by a closed 3-ball, then F1#F2 is a Seifertsurface for k1 ∪ k2, where F1, F2 are Seifert surfaces for k1, k2 respectively. If xi and yi arebases for F1 and F2 respectively, then xi, yj , µ is a basis for F1#F2, where µ is a meridian of thetube used to connected F1 and F2. This meridian does not link with any of the push-offs of thexi’s and yi’s, and vice-versa, therefore there is an entire column of zeros in t1/2S− t−1/2ST , and so∆k1∪k2(t) = 0.
Exercise F.6. Let L be an oriented link, and let L+, L−, L0 denote the links obtained from L bechanging a fixed crossing to a positive crossing, a negative crossing, or resolving the crossing in anoriented fashion. Then we have the skein relation
∆L+(t)−∆L−(t) = (t1/2 − t−1/2)∆L0(t)
Proof.
Exercise F.7.
1. σ(k) = −σ(k)
2. σ(k1#k2) = σ(k1) + σ(k2)
3. σ(k) is even for knots k
4. If k1 and k2 are concordant, then σ(k1) = σ(k2).
Proof.
1. If S is a Seifert matrix for k, then −S is a Seifert matrix for k, so
k = σ(−S − ST ) = σ(−(S + ST )) = σ(S + ST ) = σ(k)
2. If S1, S2 are Seifert matrices for k1, k2, then S1⊕ S2 is a Seifert matrix for k1#k2, and so theresult follows.
3. First we claim that det(S + ST ) 6= 0 so that S + ST has no zero eigenvalues. The Alexanderpolynomial can be written as ∆k(t) = a0 +a1(t+t−1)+ · · ·+an(tn+t−n), and since ∆k(1) = 1we must have a0 is odd, and hence det(k) = det(S+ST ) is odd. Since the number of positiveeigenvalues plus the number of eigenvalues of S + ST is equal to 2g, it follows that theirdifference is even.
4. Recall that k1 and k2 are said to be concordant if .....
Exercise F.8. For a knot k we have sign(∆k(−1)) = (−1)σ(k)/2.
Proof. We have ∆k(−1) = det(S + ST ) for some Seifert matrix S of k, and the sign of this is
125

References
[1] R. Bott. Morse theory indomitable. Publications mathematiques de l’I.H.E.S., (68):99–114,1988.
[2] Peter Ozsvath and Zoltan Szabo. On the heegaard floer homology of branched double-covers.arXiv:math/0309170v1 (math.GT), 2003.
[3] Peter Ozsvath and Zoltan Szabo. Lectures on heegaard floer homology. Clay MathematicsProceedings, 2005.
[4] J. Robbin and D. Salamon. The spectral flow and the maslov index. Bull. London Math Soc.,27:1–33, 1995.
126