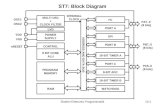
Block diagram &_overall_transferfunction_of_a_multiloop_control_system
19
‼ Control •The meaning of control is to regulate, direct or command a system so that a desire objective is obtained. ‼ Control system • It is an amalgamation of different physical elements linked in such a manner so as to regulate, direct or command itself to obtain certain objectives. or • Control system is a science, which deals with mechanisms, devices or objects joined together for the interaction with the aim to achieve the desired results.
-
Upload
prashant-thakur -
Category
Engineering
-
view
221 -
download
0
Transcript of Block diagram &_overall_transferfunction_of_a_multiloop_control_system

‼ Control• The meaning of control is to regulate, direct or command a system so that
a desire objective is obtained.
‼ Control system
• It is an amalgamation of different physical elements linked in such a manner so as to regulate, direct or command itself to obtain certain objectives.
or
• Control system is a science, which deals with mechanisms, devices or objects joined together for the interaction with the aim to achieve the desired results.

Input: The applied signal or excitation signal that is applied to control system to get a specified output is called input
Output: The actual response that is obtained from a control system due to the application of the input is termed as Output
Fig. 1 Cause and effect relationship between the input and output
Control ActionInput Output
A control system must have
• Input
• Output
• Way to achieve input and output objectives
• Control action

‼ Block Diagram
• The shorthand pictorial representation of the cause-and –effect relationship between the input and output of a physical system is known as block diagram.
Input
G(s) C(s)R(s)
OutputBlock
Fig. 1.1 A simple Block
Fig. 1.62 Block Diagram with gain

‼ Definition of basic elements of the block diagram• Summing point : Its is a small circle with appropriate plus and minus sign
associated with the arrows entering the circle. The output is the algebraic sum of the inputs. There is no limit on the number of inputs entering a summing point.
++
+-
+X(s) X(s) C(s)
Z(s)
C(s)
Y(s)
Y(s)
Fig. 1.3 Summer with Two Inputs
Fig. 1.4 Summer with Three Inputs

X(s) and Y(s) are inputs while C(s) is output.
C(s) = X(s) + Y(s)
C(s)X(s) ,Y(s) and Z(s) are inputs while C(s) is output.
C(s) = X(s) -Y(s) + Z(s)
++
X(s) C(s)
Y(s)
Fig. 1.3 Summer with Two Inputs
+-
+
X(s)
Z(s)
Y(s)
Fig. 1.4 Summer with Three Inputs

• Take off Point : A take off point allows the same signal or variable as input to more than one block or summing point, thus permitting the signal to proceed unaltered along several different paths to several destinations.
X(s)
X(s)
X(s)
X(s)Take off point
Fig. 1.5 Take off point

• Forward Path : The direction of flow of signal from input to output is known as forward path.
• Feedback Path: The direction of flow of signal from input to output is known as forward path.
G1(s) G3(s)G2(s)Input Output
Fig. 1.6 Forward Path
Fig. 1.6 Forward Path
G1(s) G2(s)
H(s)
+-

‼ Transfer Function
Transfer Function : It is the ratio of the Laplace transform of output to the Laplace transform of input (excitation) assuming all the initial conditions to be zero.
If G(s) be the transfer function of the system, we can write mathematically
G(s) = Laplace transform of output Laplace transform of input all initial conditions are zero
C(s)R(s) G(s)
C(s)R(s) all initial conditions are zero

‼ Properties of Transfer function (TF)
• The ratio of Laplace transform of output to input will all initial conditions to be zero is known as transfer function of a system.
• Transfer function cannot be defined for non-linear systems.it can be defined for linear systems only.
• The system poles and zeroes can be determined from its characteristic equitation.
• The transfer function of a system does not depend on the inputs to the system.
• Stability can be found from characteristic equation.

‼ Advantages of transfer function :
• Transfer function is a mathematical model and it gives the gain of the system
• Since Laplace transform is used, the terms are simple algebraic expressions and differential terms are not present.
• If transfer function of a system in known, the response of the system to any input can be determined very easily.
• Transfer function helps in the study of stability analysis of the system.
• Poles and zeroes of a system can be determined from the knowledge of the transfer function of he system. Both poles and zeros have a vital role in the system’s response.

‼ Disadvantages of transfer function :
• Transfer function can be defined for linear systems only.
• Initial conditions lose their importance since transfer function does not take into account the initial condition
• No inferences can be drawn about the physical structure of a system from its transfer function.

‼ Laplace Transform
• The Method of transforming a function from time domain into s domain is known as Laplace transform, where s is a complex operator denoted by
s = ϭ + ϳω
In other words, the Laplace transform will change a function in time domain to s domain.
Multi loop control system
•Multiple loop control means you use multiple feedbacks in a cascade form to influence your controlling medium. This is more rare and is only required in specific situations

Transformation Original Block Diagram Equivalent Block Diagram
G1 G2
R CG1G2
R C
C=(G1G2)R
1. Combining blocks in cascade
2. Combining blocks in parallel or eliminating
the forward loop
G1±G2
R
C=(G1±G2)R
3. Removing a block from a forward path
G1
G2
±
+ CR
G1
G2
±
+ CR
G1
R
G2
G1
C
C±
+
C= G2 (1±G2
G1 ±1) R
‼ Block Diagram Reduction Rules

Transformation Original Block Diagram Equivalent Block Diagram
G1
G2
R
±
C
1±G1G2
G2R C
G2
1±G1G2( )C = R
4. Eliminating a feedback loop
5. Removing a block from a feedback loop
1G2
G1 G2±
+
1 G2
G1G2
1±G1G2)(C = R
G1
G2
R
±
C
6. Rearranging summing points
C = R± X ± Y
±R R±Y ++ C
Y
X
±±
R R±X ++ C
X
Y
±
C = R± X ± Y

Transformation Original Block Diagram Equivalent Block Diagram
C = (R ± X) ± Y = R + (± X ± Y)
Y
C = R + ( ± X ± Y )
±
R
± X ± Y
+ C+
±X
X Y
±R R±X ++ C
±7. Rearranging summing points
GR C
C
C = GR
G
G
C
CR
C = GR
8. Moving a take of point ahead of a block

G1 G2 G3
H3
H1
H2
+ --
+ -+
• Removing the feed back loop having feed back path transfer function H2
Example : Find the simplified block diagram of Fig. 1.8 and obtain transfer function
Fig. 1.8
Fig. 1.9
C
C
R
G3
1+G3H2
G1 G2
H3
H1
+-
-+
R1
2

Interchanging the summing points 1 & 2 ,as well as replacing the cascade block by its equivalent block
G1 G2
H3
H1
+-
-+
R G3
1+G3H2
C
Fig. 2.0
H3
-+
CG3
1+G3H2
G1 G2
1+G1 G2H1
R
Fig. 2.1

C
H3
-+
G1 G2 G3
(1+G1 G2H1 ) (1+G3H2)
R
G1 G2 G3
(1+G1 G2H1 ) (1+G3H2)
G1 G2 G3 H3
(1+G1 G2H1 ) (1+G3H2)
R C
Fig. 2.2
Fig. 2.3

G1 G2 G3
(1+G1 G2H1 ) + (1+G3H2) + G1 G2 G3 H3
C R=
C
R
G1 G2 G3
(1+G1 G2H1 ) + (1+G3H2) + G1 G2 G3 H3
=( Transfer Function )