Blioumi, Smilauer: Cross-anisotropic Rock Modelled with Discrete Methods (EURO:TUN 2013)
14
EURO:TUN 2013 3 rd International Conference on Computational Methods in Tunneling and Subsurface Engineering Ruhr University Bochum, 17-19 April 2013 397 Cross-anisotropic Rock Modelled with Discrete Methods Václav Šmilauer 1 and Anastasia Blioumi 1 1 University of Innsbruck, Department of Geotechnical and Tunnel Engineering, Innsbruck, Austria Abstract In rock-engineering practice, layered rocks with cross-anisotropic features are frequently encountered. Alpine tunnel construction sites are often confronted with problems related to cross-anisotropic rocks like phyllites and schists. The assumption of isotropic behaviour is not acceptable to realistically describe the behaviour of such rocks. Rising popularity of discrete methods calls for an appropriate formulation of such materials within their framework. Analytical derivation of parameters of lattice structure which globally exhibits cross-anisotropic behaviour is presented. For this purpose, directionally isotropic lattice, of which links transmit normal and shear load, is considered. Normal and shear stiffnesses are derived as functions of link orientation in such a way that globally observed elastic behaviour recovers cross-anisotropic properties of the continuum. The procedure is based on employing the microplane model as a limit of isotropic and infinitely dense lattice. The result is still a good approximation of less ideal lattices. The aforementioned lattice arrangements can be found as contact configuration in spherical packings used in the Discrete Element Method. Discrete elements with orientation-dependent stiffness are used to show match between theoretically predicted global moduli and behaviour during element tests. A circular tunnel in cross-anisotropic rock subject to radial pressure is also simulated with discrete elements. Keywords: Rock mechanics, cross-anisotropy, discrete methods
description
Paper from proceedings of the EURO:TUN conference in year 2013.
Transcript of Blioumi, Smilauer: Cross-anisotropic Rock Modelled with Discrete Methods (EURO:TUN 2013)

EURO:TUN 2013
3rd International Conference on Computational Methods in Tunneling and Subsurface Engineering Ruhr University Bochum, 17-19 April 2013
397
Cross-anisotropic Rock Modelled with Discrete Methods
Václav Šmilauer1 and Anastasia Blioumi1 1University of Innsbruck, Department of Geotechnical and Tunnel Engineering,
Innsbruck, Austria
Abstract
In rock-engineering practice, layered rocks with cross-anisotropic features are
frequently encountered. Alpine tunnel construction sites are often confronted with
problems related to cross-anisotropic rocks like phyllites and schists. The assumption
of isotropic behaviour is not acceptable to realistically describe the behaviour of such
rocks. Rising popularity of discrete methods calls for an appropriate formulation of
such materials within their framework. Analytical derivation of parameters of lattice
structure which globally exhibits cross-anisotropic behaviour is presented. For this
purpose, directionally isotropic lattice, of which links transmit normal and shear load,
is considered. Normal and shear stiffnesses are derived as functions of link orientation
in such a way that globally observed elastic behaviour recovers cross-anisotropic
properties of the continuum. The procedure is based on employing the microplane
model as a limit of isotropic and infinitely dense lattice. The result is still a good
approximation of less ideal lattices. The aforementioned lattice arrangements can be
found as contact configuration in spherical packings used in the Discrete Element
Method. Discrete elements with orientation-dependent stiffness are used to show
match between theoretically predicted global moduli and behaviour during element
tests. A circular tunnel in cross-anisotropic rock subject to radial pressure is also
simulated with discrete elements.
Keywords: Rock mechanics, cross-anisotropy, discrete methods

Václav Šmilauer and Anastasia Blioumi
398
1 INTRODUCTION
Rocks composed of parallel layers (sedimentation or schistosity, e.g. slates and
schists) belong to the cross-anisotropic materials (often referred as transversely
isotropic or as transverse isotropic materials). In Austria, this subject is of great
interest. A great number of tunnel projects, among them the European infrastructure
project of Brenner base tunnel, are currently under constructions. These Tunnels must
be totally or partly driven through cross-anisotropic rocks like schiefer, quarz phyllite,
black phyllite and Bündner schist which are typical for the Alp region.
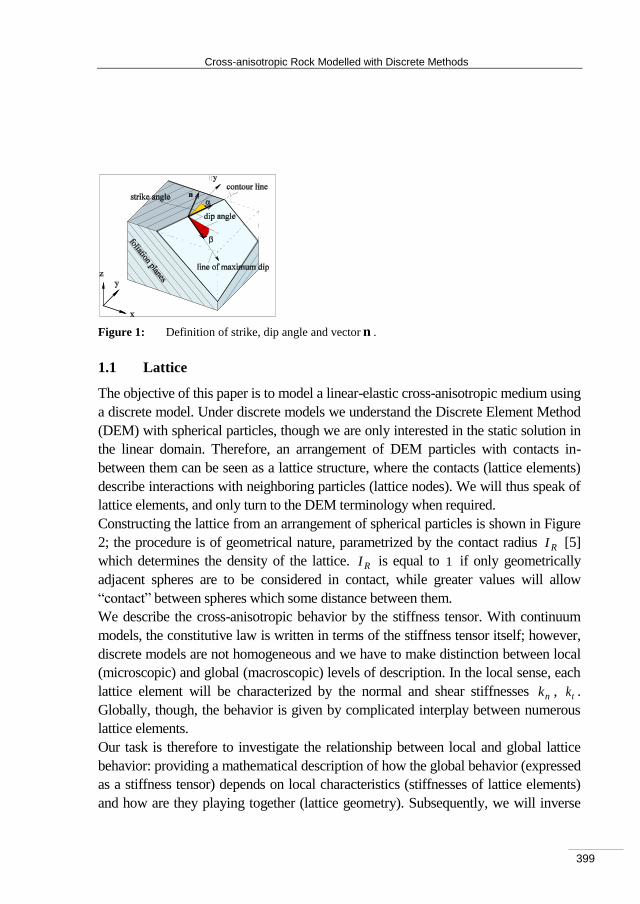
To define the orientation of the foliation planes in the 3-D space, the strike angle
and the dip angle are used. The different definitions of these angles found in the
literature can be puzzling. The authors used following definitions (see Figure 1)strike
angle is the clock-wise angle between the axis y and the contour line, i.e. the line
obtained from the intersection of the foliation plane with a horizontal one. The y -axis
coincides with the axis of the considered cylindrical cavity, e.g. tunnel or drill-hole.
Dip angle is the smallest angle between a horizontal line which is perpendicular to
the contour line and the line of maximum dip of the foliation plane.
Cross-anisotropic materials exhibit rotational symmetry in mechanical response about
the unit vector n normal to the foliation (Figure 1). This means that the material is
isotropic in the plane normal to this vector. For the case where n coincides with the
global z -axis, this symmetry is captured by the stiffness tensor
(1)
with five independent components.
In the Cartesian coordinate system x , y , z , n is given, in respect to the angles and
, as )cos,sinsin,sincos(= n .
200000
00000
00000
000
000
000
=
1211
44
44
331313
131112
131211
CC
C
C
CCC
CCC
CCC
C
Cross-anisotropic Rock Modelled with Discrete Methods
399
Figure 1: Definition of strike, dip angle and vector n .
1.1 Lattice
The objective of this paper is to model a linear-elastic cross-anisotropic medium using
a discrete model. Under discrete models we understand the Discrete Element Method
(DEM) with spherical particles, though we are only interested in the static solution in
the linear domain. Therefore, an arrangement of DEM particles with contacts in-
between them can be seen as a lattice structure, where the contacts (lattice elements)
describe interactions with neighboring particles (lattice nodes). We will thus speak of
lattice elements, and only turn to the DEM terminology when required.
Constructing the lattice from an arrangement of spherical particles is shown in Figure
2; the procedure is of geometrical nature, parametrized by the contact radius RI [5]
which determines the density of the lattice. RI is equal to 1 if only geometrically
adjacent spheres are to be considered in contact, while greater values will allow
“contact” between spheres which some distance between them.
We describe the cross-anisotropic behavior by the stiffness tensor. With continuum
models, the constitutive law is written in terms of the stiffness tensor itself; however,
discrete models are not homogeneous and we have to make distinction between local
(microscopic) and global (macroscopic) levels of description. In the local sense, each
lattice element will be characterized by the normal and shear stiffnesses nk , tk .
Globally, though, the behavior is given by complicated interplay between numerous
lattice elements.
Our task is therefore to investigate the relationship between local and global lattice
behavior: providing a mathematical description of how the global behavior (expressed
as a stiffness tensor) depends on local characteristics (stiffnesses of lattice elements)
and how are they playing together (lattice geometry). Subsequently, we will inverse

Václav Šmilauer and Anastasia Blioumi
400
the previous result, i.e. for some desired stiffness tensor, we will determine local
characteristics (stiffnesses) leading to the behavior described by that tensor.
To this end, we make use of the following assumptions: the lattice is isotropic, i.e. the
orientation of the lattice elements is in average uniformly distibuted; the displacement
of lattice nodes does not deviate from the mean displacement, in another words, the
lattice is deformed uniformly, as whole. The latter is commonly referred to as Voigt
hypothesis [4] and is an important restriction for the lattice behavior. Denser lattices
(with greater RI ) fulfill this assumption by themselves better than loose lattices, as
they have more contacts restricting deviation of individual nodes from the
surrounding deformation. We therefore expect our results to better describe the real
behavior in the case of dense lattices.
Figure 2: Dependence of lattice density on contact radius RI : (a) sphere packing for
constructing the lattice, (b) lattice with small RI , (c) lattice with bigger RI
1.2 Microplane and Lattice
The transition between discrete, i.e. lattice [3] and continuous description will be done
via the microplane theory [2]. This theory describes each material point as an infinite
number of microplanes oriented uniformly in all possible directions at that material
point, each of them characterized by volumetric, deviatoric, normal and shear moduli
(in our case, we only use the latter two, NE and TE ). The cross-anisotropic nature is
introduced by supposing dependency of those moduli on the respective microplane
orientation such that symmetries of a cross-anisotropic medium are satisfied. The
stiffness tensor is obtained by integration of the moduli over all microplanes.
The lattice structure has only a finite number of nodes and a finite number of
isotropically-oriented lattice elements in each node. The stiffness tensor is obtained by
summation of stiffnesses over all elements. We can write the lattice stiffnesses nk , tk
as functions of some yet unknown moduli NE , TE and let the lattice density grow

Cross-anisotropic Rock Modelled with Discrete Methods
401
without bounds. After limit transition, we obtain the stiffness tensor of the infinitely
dense lattice by integration of the unknown moduli over all lattice elements.
By imposing equality of microplane and lattice sttiffness tensors, we obtain the values
of the unknown lattice moduli NE , TE (proportional to the microplane moduli);
using those moduli when constructing the lattice ensures that the stiffness tensor of
the discrete lattice will be equal to the stiffness tensor of the microplane model.
Consequently, for a given stiffness tensor, we can compute lattice moduli which will
lead to the response characterized by that stiffness tensor.
1.3 Tests
The stiffness tensor of a lattice is obtained from element tests (in our case, uniaxial
unconfined compression and simple shear tests) on a periodic lattice. It is
subsequently compared with the prescribed values, and the dependence between
accuracy and lattice density is shown. The second numerical example is modeling of
a tunnel subjected to radial pressure. For space reasons, this paper does not show all
steps of the derivation in form of equations. These will be soon published separately.
2 NOTATION
NE , TE : microplane normal and tangential moduli
NE , TE : lattice normal and tangential moduli
nk , tk : lattice normal and tangential stiffnesses
mnC : stiffness matrix component
)0,2 : azimuth angle in spherical coordinates
)0, : inclination angle in spherical coordinates, from the pole
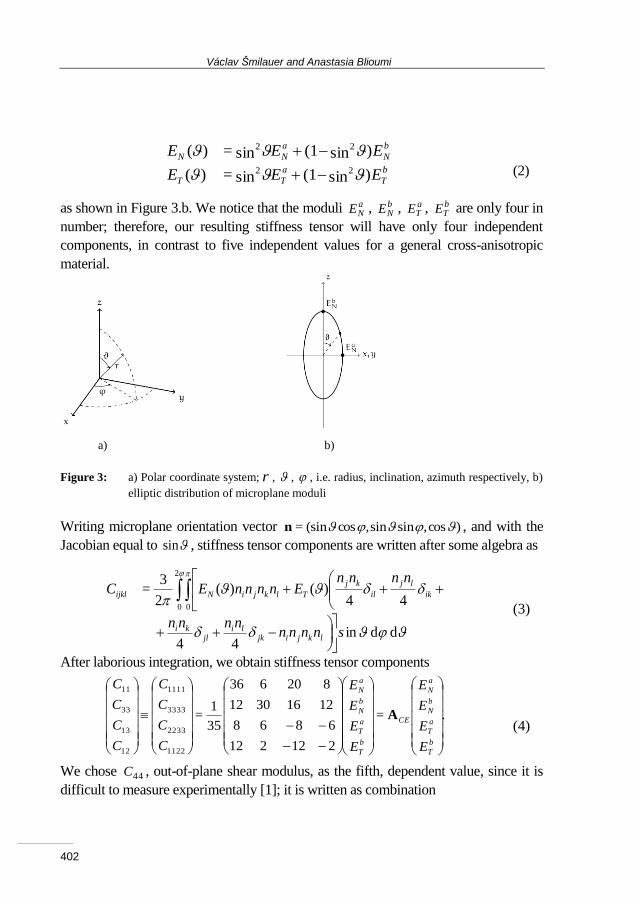
3 MICROPLANE STIFFNESS
We consider the microplane model by [2] where all microplanes only have normal
and shear moduli NE , TE . The stiffness tensor is obtained by integration of the
moduli over all possible orientations of microplanes given by the unit vector n . For
our purposes, we will integrate over angles , (Figure 3.a), z -axis being
coincident with the cross-anisotropy axis; this lets us write microplane moduli as
)(= NN EE and )(= TT EE , independent of the azimuth . We will assume that
those moduli can be given as combination of in-plane ( aNE , a
TE ) and out-of-plane (bNE , b
TE ) ones,
Václav Šmilauer and Anastasia Blioumi
402
(2)
as shown in Figure 3.b. We notice that the moduli aNE , b
NE , aTE , b
TE are only four in
number; therefore, our resulting stiffness tensor will have only four independent
components, in contrast to five independent values for a general cross-anisotropic
material.
a) b)
Figure 3: a) Polar coordinate system; r , , , i.e. radius, inclination, azimuth respectively, b)
elliptic distribution of microplane moduli
Writing microplane orientation vector )cos,sinsin,cossin(= n , and with the
Jacobian equal to sin , stiffness tensor components are written after some algebra as
(3)
After laborious integration, we obtain stiffness tensor components
(4)
We chose 44C , out-of-plane shear modulus, as the fifth, dependent value, since it is
difficult to measure experimentally [1]; it is written as combination
b
T
a
TT
b
N
a
NN
EEE
EEE
)sin(1sin=)(
)sin(1sin=)(22
22
d d in44
44)()(
2
3=
0
2
0
snnnnnnnn
nnnnEnnnnEC
lkjijkli
jlki
ik
lj
il
kj
TlkjiNijkl
.=
212212
6868
12163012
820636
35
1=
1122
2233
3333
1111
12
13
33
11
b
T
a
T
b
N
a
N
CE
b
T
a
T
b
N
a
N
E
E
E
E
E
E
E
E
C
C
C
C
C
C
C
C
A

Cross-anisotropic Rock Modelled with Discrete Methods
403
(5)
The matrix CEA in Eq. (4) is invertible; thus we obtain the solution of the inverse
problem (when ijC are given) as
4 MICROPLANE-LATTICE MODULI PROPORTION
Components of the stiffness tensor were derived for microplane moduli NE , TE ,
which are necessarily proportional to lattice contact moduli NE , TE via a
dimensionless factor , which expresses relative “stiffness density” of the lattice, and
has a geometrical meaning shown below. We will show the derivation only for the
normal moduli; the procedure for tangential moduli is identical.
Considering lattice constructed from spherical packing, we suppose intra-nodal
stiffnesses given as )/(2= 2 rrEk Nn , where 2r is a fictious contact area, divided by
contact length r2 . In general rrEk Nn /ˆ= 2 with some algorithm-dependent constant
(we assume no special value of , in the case mentioned it is equal to /2 ).
Microplane moduli are then related to intra-nodal stiffess via some unknown as
(7)
To find the value of value, we suppose that the lattice is in average isotropic, i.e.
lattice element length r2 is in average orientation-independent; the difference
between r and r accounts for possibly non-unit contact radius RI as explained
above (Figure 2). The lattice occupies volume V and has N contacts, the only
orientation-dependent values are the moduli )(' NE and )(' TE .
By comparing stiffness tensors for lattice after limit transition (Eq. (38) in [3]) with
microplane stiffness integral, we obtain, with some algebra,
(8)
with 2rr denoting the average value of 2rr over all contacts.
.
8
13
6
8
35
1=
0
1/2
1/4
1/4
=
12
13
33
11
232344
b
T
a
T
b
N
a
N
TT
E
E
E
E
C
C
C
C
CC
.=
12
13
33
11
1
C
C
C
C
E
E
E
E
CE
b
T
a
T
b
N
a
N
A
.=/ˆ== 2
NNnN ErrEkE
V
rrN
E
E
E
E
T
T
N
N
ˆ
3
2=
'=
'=
2

Václav Šmilauer and Anastasia Blioumi
404
The geometrical meaning of the equation can be seen better if we consider the special
case of both r and r being constant; averages can be then omitted, giving
(9)
We see that is dimensionless, giving proportion of N contact “volumes” (area 2ˆ2= rAi , length rli 2= ) to the overall lattice volume V .
Since all relationships for )( *ECij in (4) are linear in *E , macroscopic lattice stiffness
can be written as )(=)( ** ECEC ijij . In particular, the Eq. (4) and its inverse become
(10)
5 ELEMENT TESTS
Random dense (porosity equal to 0.5) periodic packing of spheres with equal radius is
considered. The lattice structure is created by finding contacts between particles,
using varying contact radius RI . The cross-anisotropy axis coincides with the global
z -axis. Given laboratory values of 11C , 33C , 13C , 12C , we use the current packing
geometry to determine and lattice moduli via Eq. (10) and assign stiffnesses via
Eq. (2). The goal is to compare the stiffness tensor obtained in three different ways:
the prescribed values (back-calculated from lattice stiffnesses); from the current
lattice by summation of stiffnesses, using Eq. (35) in [3]; from simulated lattice
response, with stiffnesses in Eq. (10), loaded in different ways, as decribed below.
The test is run for a range of contact radii RI , to show that denser lattice has a
stabilizing effect, being closer to the Voigt hypothesis, as mentioned in the
introduction.
5.1 Computing the Stiffness Tensor
We simulate homogeneous loading of periodic lattice structure to obtain parameters of
the cross-anisotropic material. For each axis, we perform an unconfined uniaxial
compression test to obtain normal modulus and Poisson’s ratios, and a shear test to
obtain shear modulus (Figure 4). In total, six tests are run. Out of the 12 values obtained
(three normal moduli, three shear moduli, three Poisson’s ratios, each measured twice),
only five are independent; redundant values are used to check correctness.
.)(
6
1=
)ˆ)(2(2
6
1=
2
V
AlN
V
rrN ii
.1
=
'
'
'
'
,
'
'
'
'
=
12
13
33
11
1
12
13
33
11
C
C
C
C
E
E
E
E
E
E
E
E
C
C
C
C
CE
b
T
a
T
b
N
a
N
b
T
a
T
b
N
a
N
CE AA

Cross-anisotropic Rock Modelled with Discrete Methods
405
Figure 4: Configuration of (a) unconfined uniaxial compression test in the y -direction and (b)
shear test in the xy plane
5.1.1 Normal moduli and Poisson’s ratios
To find normal moduli from simulations, we make use of the normal compliance
relationship for orthotropic material, of which cross-anisotropic material is a special
case:
(11)
and prescribe strain in one direction with zero lateral stresses and evaluate the
response. For instance, for the x -compression we prescribe (prescribed values are
denoted with ˆ)
(12)
and use measured response xx , yy , zz to compute
(13)
5.1.2 Shear moduli
The shear test is purely deformation-controlled. The periodic cell is prescribed shear
strain . Shear moduli are found from shear stiffness equations.
zz
yy
xx
zy
yz
x
xz
z
zy
yx
xy
z
zx
y
yx
x
zz
yy
xx
EEE
EEE
EEE
1
1
1
=
0,==,ˆ=ˆ= zzyyxxxx
.ˆ
=,ˆ
==,ˆ
=xx
zzxz
xx
yy
xx
xyyxy
xx
xxx
EE

Václav Šmilauer and Anastasia Blioumi
406
(14)
5.1.3 Stiffness tensor
Components of the stiffness tensor are found by inversion of the orthotropic
compliance matrix in Eq. (11) using symmetries xy EE = , yzxz = and abbreviating
zx EEe /= , 221= xzxy em :
5.2 Results
Values of input parameters for 1.8=RI are shown in Table 1. Resulting stiffnesses
for all values of RI are given in Table 2. As expected, higher values of RI lead to a
better agreement with simulated results.
Table 1: Input and derived values for the six element tests performed for 1.8=RI .
Input values Derived values
number of spheres 1060 avg. number of contacts per sphere 21
sphere radius (m) 0.04 lattice density scaling 1.89
interaction radius rI 1.8 'aNE (MPa) 64.1
11C (MPa) 130 'bNE (MPa) 6.37
33C (MPa) 55 'aTE (MPa) 3.05
13C (MPa) 28 'bTE (MPa) 1.06
12C (MPa) 40
prescribed strain 1%
.=ˆ2
=,,=2ij
ij
ij
ij
ij
ij
ij
ij GjiG
.
1
)(1
)(1
1
=
2
2
44
33
13
12
11
yz
xy
z
xy
x
xy
xzxy
x
xy
xzx
Gm
E
mE
m
eE
m
eE
C
C
C
C
C
Cross-anisotropic Rock Modelled with Discrete Methods
407
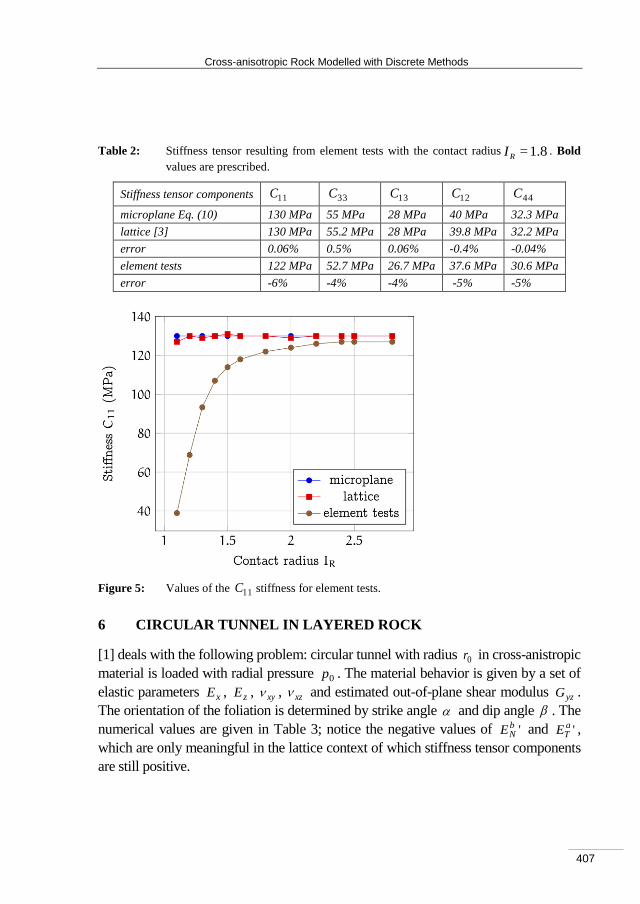
Table 2: Stiffness tensor resulting from element tests with the contact radius 1.8=RI . Bold
values are prescribed.
Stiffness tensor components 11C 33C
13C 12C
44C
microplane Eq. (10) 130 MPa 55 MPa 28 MPa 40 MPa 32.3 MPa
lattice [3] 130 MPa 55.2 MPa 28 MPa 39.8 MPa 32.2 MPa
error 0.06% 0.5% 0.06% -0.4% -0.04%
element tests 122 MPa 52.7 MPa 26.7 MPa 37.6 MPa 30.6 MPa
error -6% -4% -4% -5% -5%
Figure 5: Values of the 11C stiffness for element tests.
6 CIRCULAR TUNNEL IN LAYERED ROCK
[1] deals with the following problem: circular tunnel with radius 0r in cross-anistropic
material is loaded with radial pressure 0p . The material behavior is given by a set of
elastic parameters xE , zE , xy , xz and estimated out-of-plane shear modulus yzG .
The orientation of the foliation is determined by strike angle and dip angle . The
numerical values are given in Table 3; notice the negative values of 'bNE and 'a
TE ,
which are only meaningful in the lattice context of which stiffness tensor components
are still positive.

Václav Šmilauer and Anastasia Blioumi
408
Table 3: Input and derived values for the circular tunnel problem.
Input values Derived values
number of spheres 9100 average number of contacts 14.5
sphere radius (m) 0.24 lattice density scaling 1.32
interaction radius rI 1.5 'a
NE (GPa) 4
foliation strike angle 270° 'b
NE (MPa) -70
foliation dip angle 25° 'a
TE (MPa) -26.5
xE (GPa) 5 'b
TE (GPa) 1.17
zE (GPa) 2 2G =yzG (lattice) (GPa) 1.52
xy
0.25
xz
0.125
yzG (estimate) (GPa) 1.21
0p (MPa) 5
Stiffness tensor components are computed using Eq. (15). Lattice moduli (Eq. (10))
are used with Eq. (2) to obtain stiffnesses for the individual lattice elements. Scaling
parameter in Eq. (7) is computed from the geometrical arrangement via Eq. (9).
The DEM model consists of a regular arrangement of particles at the tunnel wall,
while the rest of the medium is the result of random central-attraction deposition.
Particle radius was chosen such that the tunnel wall has 20 particles around the
perimeter. Simulated domain was cropped circularly to 010 r , and is periodic along
the tunnel axis. All particles (including the ones on the boundaries) are free to move.
The pressure 0p is applied on the tunnel wall as force on each of the particles. The
resulting deformation curve, shown in Figure 5, corresponds qualitatively to the
results of [1] obtained with the finite element method.

Cross-anisotropic Rock Modelled with Discrete Methods
409
Figure 6: Radial displacements of the tunnel wall (innermost layer of particles).
7 CONCLUSIONS
A method of capturing cross-anisotropic behavior with discrete lattice-like models
was presented. We have established relationship between the moduli of dense lattices
and the microplane model under the assumption of the Voigt hypothesis and elliptical
distribution of orientation-dependent stiffnesses. This relationship let us determine
local lattice stiffnesses so that the global behavior corresponds to the desired stiffness
tensor; the agreement depends on the density of the lattice, which is given by the
contact radius RI ; larger values of RI give very good agreement. An example of
deformation of circular tunnel in layered rock subject to radial pressure was given.
Thus, our results find an application in modelling deformation of layered rock with
discrete models, which are becoming increasingly popular in engineering practice.

Václav Šmilauer and Anastasia Blioumi
410
ACKNOWLEDGEMENTS
The authors wish to thank the Austrian Science of Fund (FWF): I 703-N22 for the
financial support.
REFERENCES
[1] Blioumi A. On Linear-Elastic, Cross-Anisotropic Rock. PhD thesis, Faculty
of Civil Engineering of the University of Innsbruck, 2011.
[2] Carol I., Jirásek M. & Bazant Z. P. A framework for microplane models at
large strain, with application to hyperelasticity. International Journal of
Solids and Structures Vol. 410 (2), (2004), 511-557.
[3] Kuhl E., D'Addetta G. A., Leukart M. & Ramm E. Microplane modelling
and particle modelling of cohesive-frictional materials. In Continuous and
Discontinuous Modelling of Cohesive-Frictional Materials, Vol. 568 of
Lecture Notes in Physics, (2001), 31-46. Berlin / Heidelberg: Springer
[4] Liao C.-L., Chang T.-P., Young D.-H. & Chang C. S. Stress-strain
relationship for granular materials based on the hypothesis of best fit.
International Journal of Solids and Structures, Vol. 340 (31-32), (1997),
4087-4100.
[5] Stránský J., Jirásek M. & Šmilauer V. Macroscopic elastic properties of
particle models. In Proc. of the International Conference on Modelling and
Simulation 2010, Prague, June 2010.