Biomimetic-inspired CFRP to perforated steel joints
10
Biomimetic-inspired CFRP to perforated steel joints Evangelos I. Avgoulas ⇑ , Michael P.F. Sutcliffe Department of Engineering, University of Cambridge, Trumpington Street, Cambridge CB2 1PZ, United Kingdom article info Article history: Received 7 December 2015 Revised 6 May 2016 Accepted 7 June 2016 Available online 7 June 2016 Keywords: Joints/joining Hybrid CFRP Perforated steel Biomimetics Resin transfer moulding (RTM) abstract In many high-performance applications there is a need to join steel to CFRP parts. However the stiffness mismatch between these materials leads to high stress concentrations in such joints. This paper uses the biomimetics approach to help develop solutions to this problem. Nature has found many ingenious ways of joining dissimilar materials, with a transitional zone of stiffness at the insertion site commonly used. In engineering joints, one way to reduce the material stiffness mismatch is to gradually decrease the effec- tive stiffness of the steel part of the joint by perforating it with holes. This paper investigates joining of flat perforated steel plates to a CFRP part by a co-infusion resin transfer moulding process. The possible effect of mechanical interlocking as resin fills the perforations is assessed by filling the holes with PTFE prior to moulding to prevent such resin ingress. The joints are tested under static tensile loading. The per- forated steel joints show a 175% increase of joint strength comparing to non-perforated joints. Finite ele- ment analyses are used to interpret the experimental results. It has been found that the model is able to reproduce with accuracy the experimental load–displacement test curves and show the failure mecha- nisms of the joint. Ó 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY license (http:// creativecommons.org/licenses/by/4.0/). 1. Introduction Joining of composite parts is a key issue because these struc- tural discontinuities are often the Achilles heel of a composite design. In an ideal world, joints would be eliminated from struc- tures altogether so as to remove these sources of complexity and weakness, as well as reducing weight [1]. However this ideal can- not be realised for many reasons, such as requirements for struc- ture disassembly during transportation, access for repair and inspection, and size limitations imposed by the materials or man- ufacture processes. Adhesive bonding is a popular method for join- ing dissimilar materials because such joints have higher structural efficiency, excellent fatigue life, a particularly small weight pen- alty, and more uniform stress fields than alternatives such as fastening or riveting. Moreover adhesive bonding allows joining of dissimilar materials as corrosion can be prevented and different thermal expansions in the adherends can be accommodated [2–6]. When joining dissimilar materials, a ‘‘hybrid” structure is created, which gives structural properties not attainable by any of the indi- vidual materials. Joining of dissimilar materials, such as carbon fibre reinforced plastic (CFRP) or glass fibre reinforced plastic (GFRP) to steel or alu- minium, is widely used in the aeronautics, aerospace, high perfor- mance sports, automotive and marine industries. However difficulties arise when joining dissimilar materials due to the large difference in material properties between the adherends. In partic- ular a stiffness mismatch leads to high stress concentrations, and accordingly weak joints [7]. Since such joints are used in high per- formance structures, a new approach is needed to meet this challenge. This paper uses the biomimetic approach to inspire a new joint design. Biomimetics is the imitation of nature’s design principles as applied to engineering or man-made structures. Nature has the advantage of billions of years to produce an amazing range of design solutions to the many problems that biological organisms face. In particular the natural world has many examples where two components of differing material properties are joined together [8]. Hence a biomimetic-inspired approach to find an innovative joint method sounds attractive. However, biomimetics cannot simply copy the designs of nature because of significant dif- ferences between nature’s materials and engineering materials. Vertechy and Parenti-Castelli [9] recommend the following steps in a biomimetic-inspired approach for the joints: (1) comprehen- sion and analysis of the functionalities and the structure of biolog- ical joints; (2) identification of the features that may be transferred from biological to man-made types of joints; (3) devising the most favourable joint configuration that will highlight the identified fea- tures by considering the available technology and materials; and http://dx.doi.org/10.1016/j.compstruct.2016.06.014 0263-8223/Ó 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/). ⇑ Corresponding author. E-mail addresses: [email protected] (E.I. Avgoulas), [email protected] (M.P.F. Sutcliffe). Composite Structures 152 (2016) 929–938 Contents lists available at ScienceDirect Composite Structures journal homepage: www.elsevier.com/locate/compstruct
Transcript of Biomimetic-inspired CFRP to perforated steel joints

Composite Structures 152 (2016) 929–938
Contents lists available at ScienceDirect
Composite Structures
journal homepage: www.elsevier .com/locate /compstruct
Biomimetic-inspired CFRP to perforated steel joints
http://dx.doi.org/10.1016/j.compstruct.2016.06.0140263-8223/� 2016 The Authors. Published by Elsevier Ltd.This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/).
⇑ Corresponding author.E-mail addresses: [email protected] (E.I. Avgoulas), [email protected]
(M.P.F. Sutcliffe).
Evangelos I. Avgoulas ⇑, Michael P.F. SutcliffeDepartment of Engineering, University of Cambridge, Trumpington Street, Cambridge CB2 1PZ, United Kingdom
a r t i c l e i n f o
Article history:Received 7 December 2015Revised 6 May 2016Accepted 7 June 2016Available online 7 June 2016
Keywords:Joints/joiningHybridCFRPPerforated steelBiomimeticsResin transfer moulding (RTM)
a b s t r a c t
In many high-performance applications there is a need to join steel to CFRP parts. However the stiffnessmismatch between these materials leads to high stress concentrations in such joints. This paper uses thebiomimetics approach to help develop solutions to this problem. Nature has found many ingenious waysof joining dissimilar materials, with a transitional zone of stiffness at the insertion site commonly used. Inengineering joints, one way to reduce the material stiffness mismatch is to gradually decrease the effec-tive stiffness of the steel part of the joint by perforating it with holes. This paper investigates joining offlat perforated steel plates to a CFRP part by a co-infusion resin transfer moulding process. The possibleeffect of mechanical interlocking as resin fills the perforations is assessed by filling the holes with PTFEprior to moulding to prevent such resin ingress. The joints are tested under static tensile loading. The per-forated steel joints show a 175% increase of joint strength comparing to non-perforated joints. Finite ele-ment analyses are used to interpret the experimental results. It has been found that the model is able toreproduce with accuracy the experimental load–displacement test curves and show the failure mecha-nisms of the joint.� 2016 The Authors. Published by Elsevier Ltd. This is an openaccess article under the CCBY license (http://
creativecommons.org/licenses/by/4.0/).
1. Introduction
Joining of composite parts is a key issue because these struc-tural discontinuities are often the Achilles heel of a compositedesign. In an ideal world, joints would be eliminated from struc-tures altogether so as to remove these sources of complexity andweakness, as well as reducing weight [1]. However this ideal can-not be realised for many reasons, such as requirements for struc-ture disassembly during transportation, access for repair andinspection, and size limitations imposed by the materials or man-ufacture processes. Adhesive bonding is a popular method for join-ing dissimilar materials because such joints have higher structuralefficiency, excellent fatigue life, a particularly small weight pen-alty, and more uniform stress fields than alternatives such asfastening or riveting. Moreover adhesive bonding allows joiningof dissimilar materials as corrosion can be prevented and differentthermal expansions in the adherends can be accommodated [2–6].When joining dissimilar materials, a ‘‘hybrid” structure is created,which gives structural properties not attainable by any of the indi-vidual materials.
Joining of dissimilar materials, such as carbon fibre reinforcedplastic (CFRP) or glass fibre reinforced plastic (GFRP) to steel or alu-
minium, is widely used in the aeronautics, aerospace, high perfor-mance sports, automotive and marine industries. Howeverdifficulties arise when joining dissimilar materials due to the largedifference in material properties between the adherends. In partic-ular a stiffness mismatch leads to high stress concentrations, andaccordingly weak joints [7]. Since such joints are used in high per-formance structures, a new approach is needed to meet thischallenge.
This paper uses the biomimetic approach to inspire a new jointdesign. Biomimetics is the imitation of nature’s design principles asapplied to engineering or man-made structures. Nature has theadvantage of billions of years to produce an amazing range ofdesign solutions to the many problems that biological organismsface. In particular the natural world has many examples wheretwo components of differing material properties are joinedtogether [8]. Hence a biomimetic-inspired approach to find aninnovative joint method sounds attractive. However, biomimeticscannot simply copy the designs of nature because of significant dif-ferences between nature’s materials and engineering materials.Vertechy and Parenti-Castelli [9] recommend the following stepsin a biomimetic-inspired approach for the joints: (1) comprehen-sion and analysis of the functionalities and the structure of biolog-ical joints; (2) identification of the features that may be transferredfrom biological to man-made types of joints; (3) devising the mostfavourable joint configuration that will highlight the identified fea-tures by considering the available technology and materials; and

930 E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938
(4) by using the available technology, materials and the chosenjoint configuration, design optimised solutions for the applicationat hand.
Following these guidelines an extensive literature survey of nat-ural joint systems has been conducted [8] to understand the func-tions of natural joint systems and to identify features that may betransferred from natural to engineering joints between metal andcomposite. A common solution found in nature when joining dis-similar materials is to use a transitional zone of stiffness at theinsertion site [8]. One example is the way that relatively complianttendon is attached to much stiffer bone through a complex transi-tional region [10–14]. Other examples include the byssus threadsthat anchor mussels to rocky shores [15–17], and the hard jawsof marine polychaete worms, which anchor to soft tissue at theirbase [18,19].
One way to apply this approach to engineering joints is to grad-ually decrease the stiffness of the metal part of the joint by perfo-rating it. The concept of reducing the stiffness of a steel plate usingperforations was first proposed and patented by Unden and Ridder[20]. Related studies have been conducted by Melogranaa andGrenestedt [21], where perforated stainless steel to glass fibre rein-forced vinyl ester composite joints with different surface prepara-tions, adhesives and primers were experimentally investigated.Cao and Grenestedt [7] experimentally tested a co-infused sand-wich structure with composite (glass fibre) skins joined to a perfo-rated steel hybrid structure. Similar studies that remove materialfrom the adherend with the larger stiffness to increase the jointstrength have been carried out by Hart-Smith [22], where heexperimentally investigated adhesively-bonded double scarf andstepped-lap joints with dissimilar adherends.
This paper builds upon previous research by applying the perfo-ration concept to co-infused CFRP to perforated steel joints. Thehybrid joints were numerically and experimentally investigatedusing static mechanical testing. The hypothesis that the resin orfibres in the perforations produce mechanical interlocking to givehigher strength to the joints was experimentally evaluated, testingthe assumption of previous researchers [7,21]. A high speed cam-era was used to identify the failure mode of the joints.
The structure of this paper is as follows. The joint design con-cept and the perforated steel details are defined in Section 2, andthe numerical modelling details are given in Section 3. In Section 4the experimental methodology is presented, with the results and
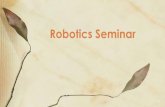
Butt end
CFRP skinsResin in the holes
Fig. 1. CFRP to perforated steel m
discussion of the outputs analysed in Section 5. Lastly, Section 6presents the conclusions.
2. Design concept
Fig. 1 illustrates the proposed joint configurations studied inthis paper, consisting of joints between unidirectional CFRP andsteel parts. The steel plates were perforated to create a transitionalzone of stiffness between the steel and CFRP adherends. These con-cepts were examined both numerically using the finite elementapproach and with an experimental programme of testing. Asshown in Fig. 1, perforated steel plates were inserted into a stackmade of CFRP. There are three contact areas between the CFRPand the steel parts. The butt end of the steel contacts the middlelayer of CFRP, while the top and bottom of the steel plate makescontact with the two outer CFRP layers. The same geometry wasused for both numerical and experimental parts. This embeddedjoint geometry has been previously used by researchers to investi-gate the strength of perforated steel to GFRP adherends [7,20,21].For comparison, reference specimens were tested with the sameconfiguration but with no perforations in the steel part.
2.1. Perforation details
A preliminary parametric finite element analysis (using linear-elastic material properties) was carried out with the finite elementsoftware ABAQUS� 6.12 to optimise the perforation patterns usedboth in the experimental and numerical modelling, while keepingall the other aspects of the joint geometry constant. In this prelim-inary analysis, the following parameters were investigated: thenumber of rows of perforations, the perforation diameters, the dis-tance between perforations, and the range of perforation diame-ters. Fig. 2 shows the predicted shear stresses rxy along the jointoverlap length and the stresses rxx normal to the butt end of thesteel part of the joint, for various ranges of perforation diameters.The locations with x = 0 and x = 60 mm correspond to the left andright end of the overlap length, respectively. The locations withz = 0 and z = 5 mm correspond to the bottom and top end of thebutt edge of the joint, respectively. This preliminary analysisshowed that two styles of perforation pattern performed well, apattern with a maximum hole diameter of 4 mm (denoted ‘‘SH”for small hole), and a large hole (‘‘LH”) pattern with a maximum
Perforated steel
CFRP edge
odel design configuration.

-40
-30
-20
-10
0
10
20
0 20 40 60
xysh
ear s
tress
(MPa
)
Position along the overlap x (mm)
REFPerforation diameter range: 4 to 2.5 mmPerforation diameter range: 4.5 to 3 mmPerforation diameter range: 5 to 3.5 mmPerforation diameter range: 5.5 to 4 mm
0
40
80
120
160
0 1 2 3 4 5
xxno
rmal
stre
ss (M
Pa)
Through-thickness position z (mm)
Fig. 2. Effect of the range of perforation diameters on the shear stresses rxy along the overlap length and on the stresses rxx normal to the butt end of the steel part of thejoint; rows of perforation – 7; step increment between rows of perforation – 0.25 mm with each row; Perforation diameter range – maximum to minimum diameter.
R1.
625
R1.
75R
1.87
5R
2
R1.
5R
1.37
5R
1.25
3.75
3.75
7.5
7.5
7.5 7.
57.
57.
57.
5 7.5
7.5
7.5
7.5
7.5
7.5
7.5
3.75
3.75
R1.
75R
1.87
5R
2 R2.
25R
2.37
5
R2.
125
R2.
58
4
1216
2024
28
48
1216
2024
28HLHS
Fig. 3. Small Holes (SH) and Large Holes (LH) steel perforation patterns, dimensions in mm.
E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938 931
hole diameter of 5 mm. In both cases there were seven rows ofholes, with a change in diameter between rows of holes of0.25 mm. These patterns are illustrated in Fig. 3. The SH patternmost reduced the shear stress rxy along the overlap length (OL)of the joint, while the LH pattern most reduced the stresses rxx act-ing at the butt end of the steel part, which it was assumed wasadhered to the opposing composite face. At the same time theseconfigurations did not lead to very high stress concentrations inthe steel part arising from the existence of the holes.
3. Numerical modelling
Following on from the preliminary analysis described abovewhich was used to identify appropriate optimised hole designs,more sophisticated three-dimensional finite-element models ofthe chosen perforated steel to CFRP joints were developed withthe finite element software ABAQUS� 6.12. A three-dimensionalmodel was required to study the joint behaviour due to the threedimensional stress state introduced by the complicated geometryof the perforation patterns. The dimensions of the model can be
seen in Fig. 4. The overlap length and the free lengths of the steeland CFRP parts were all equal to 60 mm.
The CFRP and steel adherends were modelled with elasticorthotropic and isotropic material properties, respectively. A fullcharacterisation of the CFRP material properties has been carriedout by GE Aviation (Dowty Propellers) but for commercial sensitiv-ity reasons, representative values, which are close to the onesobtained, have been used for the numerical modelling. Materialproperties used for the CFRP adherends are presented in Table 1.These correspond to the properties of the material used in theexperimental specimens. The Young’s modulus of the steel mate-rial was taken as 200 GPa and the Poisson’s ratio as 0.28. Linear8-node incompatible modes brick elements (Abaqus element typeC3D8I) were used for both adherends. For convergence reasons, themesh and geometry were kept consistent between the non-perforated and perforated joint models. Thus, in all the cases, geo-metrical partitions of the perforation patterns were created inABAQUS, which were simulated with an isotropic material. Thiswas steel in the non-perforated joint (i.e. using the same propertiesas the adherend) and resin Araldite LY564/Aradur 2954 (Table 2) in

(a)
(b)
z
x
ux
Fig. 4. (a) Joint geometry (dimensions in mm) and (b) loading and boundary conditions.
Table 1Material properties of the CFRP adherends.
E1(GPa)
E2(GPa)
E3(GPa)
m12 m13 m23 G12
(GPa)G13
(GPa)G23
(GPa)
100 5 5 0.3 0.28 0.28 2 1.5 1.5
Table 2Properties of the adhesive Araldite LY564/Aradur 2954.
Property Araldite LY564/Aradur 2954
Young’s modulus, E (GPa) 15.9Shear modulus, G (GPa) 6.0Poisson’s ratio 0.35Tensile ultimate strength, rf (MPa) 46Shear ultimate strength, sf (MPa) 63Mode I toughness, GIC (J/m2) 180Mode II toughness, GIIC (J/m2) 380
932 E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938
the perforated joint. The mesh density was chosen as the best com-promise between convergence, accuracy and computational cost.The mesh was automatically created by ABAQUS including biaseffects, with smaller sized elements near the overlap edges andthe butt end of the joint, and in the thickness direction near theadhesive layers. This approach was used because it is known that,theoretically, there is a stress singularity at the overlap edges [23].To provide identical modelling conditions for the adhesive layer inall the models, the element edge size was taken equal throughoutthe overlap (with a size of approximately 0.2 mm). The final totalnumber of elements in the model was approximately 315,000.
To calculate the load carrying capacity of the adhesive joints,cohesive elements were used for the simulation [24,25]. The adhe-sive layer was modelled with a single layer of 8-node three-dimensional cohesive elements (Abaqus element type COH3D8)with a thickness of 0.2 mm. The cohesive elements were placedin between the CFRP and steel adherends in the overlap and buttpart of the joint (see Fig. 4). A triangular cohesive zone degradationformulation was chosen because of its simplicity, widespread usefor investigation purposes, especially for brittle adhesives [26],and availability in ABAQUS. A quadratic nominal stress criterionwas used to define damage initiation, using:
tnton
� �2
þ tstos
� �2
þ tttot
� �2
¼ 1 ð1Þ
where tn, ts and tt represent the normal and the two shear tractionsdirections, respectively. The quantities ton, t
os and tot represent the
peak values of the nominal stress when the deformation is eitherpurely normal to the interface or purely in the first or the second
shear direction, respectively. An energy power-law mixed-modecriterion was used to define damage evolution as follows:
Gn
GCn
( )a
þ Gs
GCs
( )a
þ Gt
GCt
( )a
¼ 1 ð2Þ
where Gn, Gs and Gt denote the work done by the tractions and theirconjugate relative displacements in the normal, first, and secondshear directions, respectively. The quantities GC
n , GCs and GC
t referto the critical fracture energies required to cause failure in the nor-mal, the first, and the second shear directions, respectively. Thevalue of a was chosen to be equal to 2. The material properties usedto define the cohesive law were taken from the manufacturer’s datasheets and summarised in Table 2, based on the adhesive AralditeLY564/Aradur 2954 which was used in the experiments. A full char-acterisation of the adhesive material properties has been carried outby GE Aviation (Dowty Propellers), but as for the CFRP adherends,for commercial sensitivity reasons representative values, whichare close to the ones obtained, have been used for the numericalmodelling.
A geometrically non-linear static analysis was performed. Fixedboundary conditions were applied to the CFRP end of the joint. Adisplacement ux was applied to the steel end of the model togetherwith a lateral restraint (see Fig. 4).
4. Experimental methodology
4.1. Specimen manufacture
The perforated joint concepts described above were realisedexperimentally using resin transfer moulding (RTM) to co-infuseand bond the composite-to-steel joint. A two-part mould wasdesigned and manufactured for the purpose of this study. Springsteel plate specimens (EN 42) were cut to a width of 180 mm tofit into the mould. For high accuracy of hole diameter, the steelparts were perforated with a water-jet cutter. The steel parts weresand-blasted and cleaned before moulding, given the importanceof surface roughness in increasing the adhesion [27–29]. Dry unidi-rectional CFRP fibres were placed in the mould around the steelplate to assemble the joint configuration (Fig. 5). The resin (Ara-ldite LY564/Aradur 2954; see Table 2) was then injected. A pres-sure cycle of 70 kPa (10 psi) to 483 kPa (70 psi) followed, withthe temperature held at 70 �C during this cycle. The panels werepost-cured in an oven (using a 170 �C post-cure cycle accordingto the resin supplier’s recommended cure procedure). The panelswere then cut by a water-jet into specimens with a nominal widthof 30 mm. End tabs were not used. Further details of the design andmanufacturing details can be found in [30].

(a) (b)Fig. 5. Joint assembly in the mould showing the dry CFRP fabric and perforated steel plates: (a) without and (b) with PTFE inserts in the holes.
E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938 933
In the standard manufacturing procedure, resin was able to flowinto the holes to fully fill them. At some locations, fibres wereobserved to intrude into the perforations due to the pressure ofthe mould. It was hypothesised that the mechanical interlockingeffect of these resin/fibres regions would enhance the jointmechanical properties. To test this hypothesis all of the holes insome test specimens were filled with PTFE plugs turned down froma circular rod of 6 mm nominal diameter, so preventing ingress ofresin or fibres into the holes, see Fig. 5b.
4.2. Tensile testing and high speed camera
Static tensile tests were performed using an Instron 6025 testmachine with a 100 kN load cell. A fixed displacement rate of0.2 mm/min was used for all the tests. The specimens were testeduntil final failure. The load and displacement readings wereobtained from the machine load cell and clip gauge extensometerswith a 90 mm span, respectively. Displacement measurementswere also taken from the test machine cross head displacement.The cross head displacement was significantly larger than the dis-placement taken from the extensometers due to the compliance ofthe machine. Extensometers were not used in all the tests, as themain aim of the experiments was focusing on the failure load.Wedge type grips were used for all the tests. The tested configura-tions consisted of five reference specimens (using non-perforatedsteel parts), five specimens with a SH and five with a LH perfora-tion pattern. Finally four and two specimens, respectively, weretested with SH-with-PTFE and LH-with-PTFE perforation patterns.Fewer joints were tested for the SH-with-PTFE and LH-with-PTFEperforation patterns due to manufacturing limitations.
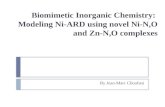
Fig. 6. Comparison between the numerical predictions and measured experimentalload–displacement response curves, comparing non-perforated (REF) and perfo-rated (SH) steel joints.
Cameras were used to image the initiation and propagation ofthe joint failure of selected tests. For the perforated steel configu-rations, a Phantom v.12 high speed camera was used to capture thecatastrophic failure of the joints at a frame rate of 16,000 framesper second (fps). Halogen lamps were used to produce lightingneeded to take high quality picture frames. A gold colour markerwas used to draw lines through the thickness of the specimen tofacilitate the visualisation of the failure. Because the high speedcamera was able to capture with high accuracy only the last 10 sbefore the final failure of the joint, this camera was not suitablefor recording the slow and progressive failure of the reference con-figuration joints. For these tests a PixeLINK camera (model PL-B873CU) was used to video the test at a frame rate of 0.1 fps.
Additional data related to this publication is available at theCambridge University data repository (http://dx.doi.org/10.17863/CAM.211).
5. Results and discussion
5.1. Load–displacement response
Fig. 6 shows the load versus displacement results from experi-mental tests on a SH joint without PTFE inserts and on a referencejoint configuration. The displacements were taken from exten-someter measurements across a 90 mm gauge length spanning
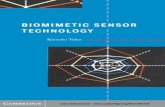
Fig. 7. Comparison of the average maximum load between non-perforated andperforated steel joints; Reference (REF) non-perforated steel; Small Holes (SH) and(LH) steel perforation patterns; perforation patterns with PTFE in the holes (PTFESH, PTFE LH).

934 E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938
the overlap length of the joint. The perforated joint has only a smalldrop in stiffness before it fails catastrophically. By contrast, thenon-perforated reference joint failed prematurely at the butt endof the joint steel part, with a crack propagating away from thereto give failure of one of the two laps. This gives the sharp changein the load–displacement curve as seen in the dashed experimentallines of Fig. 6. After this initial failure, the remaining intact lap wasable to carry a further increased load until final failure occurred.
Fig. 6 shows that the perforated joint exhibited a slightlyreduced stiffness compared to the reference joint from the numer-ical models. The experimental stiffness for the perforated joint wasin good agreement with predictions, while the reference jointshowed a significantly reduced stiffness, perhaps due to microc-racking in the initial loading phase.
Fig. 6 includes as solid lines the load displacement curves pre-dicted by the finite element models for the two joint configura-tions, again taking the displacement over a 90 mm spansymmetrically covering the overlap length of the joint. Includedin the Figure is a simulation for the standard reference configura-tion and an additional calculation where one of the laps of the ref-
(a)
(b)Fig. 8. (a) Catastrophic failure of a perforated SH specimen, showing selected frames froframe number; the time between frames is 1/16,000 s), (b) schematic representation of
erence joint was assumed to fail at the load observed in theexperimental test. The numerical and experimental results are ingood agreement for the SH joint. For the reference joint, the initialstiffness of the joint is well modelled, but the response associatedwith premature failure of one lap is not captured. However wherethis failure is explicitly included in the numerical model, the sub-sequent response seen in the experiments is well modelled, indi-cating the accuracy of the finite element model.
5.2. Maximum load
Fig. 7 summarises the average maximum loads obtained fromthe experiments. The percentage increase for each perforated jointconfiguration, compared with the non-perforated reference joints,is presented. The error bars represent the standard deviation foreach test configuration. As expected from the results of previouswork on perforated steel to GFRP joints [7,21,31], the perforatedjoints have a significantly higher strength than the non-perforated joints. The average maximum load for the referencejoint configurations was 17.7 kN, while the average maximum load
m the high speed camera video (time proceeds from left to right as indicated by thethe failure mechanisms seen in the images.

E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938 935
was 47.6 kN, 44.9 kN and 48.7 kN for the SH, LH and SH-with-PTFEperforated configurations, respectively. Compared to non-perforated joints, the perforated SH with PTFE configurationshowed a 175% increase of joint strength.
The strengths predicted from the numerical models for the ref-erence and SH joint configuration were 18.9 kN and 43.3 kN,respectively. Compared to the average maximum load obtainedfrom the experiments, the numerical model over-estimated thejoint strength for the reference configuration by 7% and under-estimated the joint strength for the SH configuration by 9%.
The difference in the measured average maximum load for per-forated joints with and without PTFE in the SH specimens was neg-ligible. Thus, the hypothesis that resin or fibre ingress into theholes gives an increase in joint strength associated with mechani-cal interlocking is not correct for this perforation case. Instead it is
(a)
(b) Fig. 9. (a) Progressive failure of a non-perforated reference specimen, taking selected frabetween frames is 10 s), (b) schematic representation of the failure mechanisms seen in
presumed that the dominant factor which contributed to the sig-nificantly higher strength of the perforated joints, comparing tothe non-perforated ones, is the transitional zone of stiffness. Forthe LH configuration, specimens without PTFE inserts were 100%stronger on average than those with PTFE. However the paucityof PTFE results (only two) and the large difference in their maxi-mum load makes it difficult to draw firm conclusions regardingthe mechanical interlocking hypothesis from this set of LHtests. Nevertheless, these results are included for the sake ofcompleteness.
5.3. Failure observation using high speed camera
For the perforated joints, high-speed camera images showedthat the failure initiated at the CFRP end of the joint with a crack
mes from the low-speed camera video (time proceeding from left to right, time-stepthe images.

936 E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938
propagating rapidly towards the butt end. The crack propagated atthe steel and composite interface. Fig. 8 shows selected framescapturing the failure initiation and the catastrophic failure of aSH joint. Key failure events were identified from the high speedcamera and are presented in Fig. 8. It is worth noting that, for allthe perforated joints, the whole failure event took place within0.20–6.75 ms. The fastest catastrophic failure occurred in SH-PTFE specimens.
On the other hand, the low-speed videos taken of the non-perforated joints indicated that the failure initiated at the butt endof the steel part of these joints, propagating towards the CFRP jointend until the first lap failed (c.f. Fig. 9). From that point, the singleintact lap carried a further increased load until final failure occurred.
No difference was observed in the failure mode of perforatedjoints with and without PTFE material in the holes.
These observations indicate that the perforations in the steelpart changed the failure mode of the joints, from failure initiallyat the butt end for the non-perforated joints, to initial failure atthe CFRP end of the perforated joints. It is inferred that it is thischange in failure mode associated with the change in steel stiffnesswhich gives the observed increase in failure strength. It is believedthat the perforations arrest the failure mechanisms from the buttpart of the joint and transfers the failure initiation/propagationto the CFRP end of the joint.
5.4. Visual specimen observation after failure
Visual observation after testing showed that the circular holesof the steel had remained circular, implying that only elastic defor-
(a)
Fig. 10. (a) Shear stiffness degradation factor and (b) von Mises stress distribution in thapply to each set of figures.
mation occurred. This is consistent with the observation that thenon-perforated joints showed very little deformation prior to fail-ure (around 150–200 lm elongation, see Fig. 6).
As mentioned above, the failure of the non-perforated joints ini-tiated at the butt end of the joint. This is in line with the observa-tions of Melograna and Grenestedt [21] from testing GFRP-to-perforated steel joints in a similar configuration. The authorsobserved that, for the non-perforated steel joints (with and with-out surface primers), delaminations always initiated at the buttend of the steel and propagated towards the end of the composite.
5.5. Failure prediction in numerical models
The failure mechanisms identified experimentally in the perfo-rated joints suggested that the perforations arrested the crack ini-tiation/progression. Finite element models were used to predictand compare the failure mechanisms observed in the experimentalresults. Fig. 10 shows the damage progression and the von Misesstress distribution along one of the adhesive layers obtained fromthe numerical results for the SH steel perforation pattern. The out-put variable plotted in Fig. 10(a) to monitor the damage progres-sion in the cohesive zone elements is the stiffness degradation inshear (SDEG). A value of shear degradation equal to zero corre-sponds to the undamaged material while a value of one denotescomplete failure. Fig. 10 shows predictions of damage in the non-perforated joints initiating at the steel butt end of the joint andpropagating towards the perforations. The joint reaches its peakload when the damage propagation reaches the end of the perfora-tions. Final failure occurred with cracks propagating from both
(b)
e adhesive layer at various loading stages (SH perforation pattern). The same scales

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
8
16
24
32
40
48 Peak Load
Damage Initiation
Joint Stiffness Degradation Initiation
Extensometer displacement (mm)
Forc
e (k
N)
0
Fig. 11. Failure mechanisms identified in the behaviour of the load–displacementcurve obtained from the numerical modelling for the SH steel perforation pattern.
E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938 937
directions (towards the end of the lap; from the CFRP towards thebutt end). The failure mechanism predicted with the finite elementmodel can be divided into three events. These are damage initia-tion, joint stiffness degradation initiation, and damage propagationup to peak load. These are illustrated in Fig. 10.
Fig. 11 illustrates how the failure events of the joint affected thebehaviour of the load–displacement curve obtained from thenumerical modelling for the SH steel perforation pattern. In the ini-tial stage of loading the joint stiffness was maximum. Although theonset of damage in the adhesive layer has occurred, there is only aslight reduction in joint stiffness. It is believed that the first row ofperforations arrests the crack from the point of damage initiationto the point of joint stiffness degradation initiation (see Figs. 10and 11). Joint stiffness degradation initiated as the crack propa-gated through the perforations. A progressive loss of joint stiffnessoccurred with the peak load being reached when the crack propa-gated up to the end of the perforations. Finally, after slight furtherdeformation, the joint completely failed. The model showed thatthe perforations initially arrested and then delayed the damagepropagation, as was hypothesised from the experimental observa-tions. This demonstrates that the finite element formulation andmaterial cohesive zone modelling adopted were able to capturethe experimentally observed failure mechanisms.
6. Conclusions
A numerical and experimental investigation of CFRP to perfo-rated steel joints has been presented. Small hole (SH) and largehole (LH) perforation configurations have been compared with areference configuration without perforations in the steel. Com-pared to non-perforated joints, perforated joints showed a 175%increase of joint strength, a linear response, larger stiffness andfailed catastrophically. High speed camera images showed thatthe failure initiated at the CFRP end with a crack propagatingabruptly towards the butt end of the joint. By contrast, non-perforated joints failed prematurely at the butt end and a crackpropagated away from there to give failure of the first lap. After ini-tial failure, the single intact lap withstood a further increased loaduntil final failure occurred. The factor that contributed to the sig-nificantly higher strength of the perforated joints was the transi-tional zone of stiffness that the perforated joints offer.Comparison of joints with and without PTFE plugs in the holesshowed that mechanical interlocking of the resin and fibres inthe holes did not lead to an additional increase of the joint strengthin the SH specimens. Results were inconclusive on this point forthe LH specimens. Comparison of experimental results and finite
element predictions showed a good agreement of load–displace-ment curves. Similar failure and damage mechanisms wereobserved between numerical predictions and failed jointspecimens.
Acknowledgements
The authors acknowledge the financial support provided by theEngineering and Physical Sciences Research Council (EPSRC) andDowty Propellers (part of GE Aviation). We also thank John Dunn,Kevin Pentony and Ben Smith from Dowty Propellers, who sup-ported the project and helped with the mould design and RTM.Finally, we would like to thank Alistair Ross and Alan Heaver fromCambridge University, who offered valuable assistance with thespecimen manufacture and experimental activities, respectively.
References
[1] Eckold G. Design and manufacture of composite structures. Cambridge,UK: Woodhead Publishing Ltd; 1994.
[2] Banea MD, da Silva LFM. Adhesively bonded joints in composite materials: anoverview. J Mater: Des Appl 2009;223:1–18.
[3] Campilho RDSG, Banea MD, Neto JABP, da Silva LFM. Modelling of single-lapjoints using cohesive zone models: effect of the cohesive parameters on theoutput of the simulations. J Adhes 2012;88:513–33.
[4] Anyfantis KN. Finite element predictions of composite-to-metal bonded jointswith ductile adhesive materials. Compos Struct 2012;94:2632–9.
[5] Anyfantis KN, Tsouvalis NG. Loading and fracture response of CFRP-to-steeladhesively bonded joints with thick adherents – Part I: experiments. ComposStruct 2013;96:850–7.
[6] Anyfantis KN, Tsouvalis NG. Loading and fracture response of CFRP-to-steeladhesively bonded joints with thick adherents – Part II: numerical simulation.Compos Struct 2013;96:858–68.
[7] Cao J, Grenestedt L. Design and testing of joints for composite sandwich/steelhybridic ship hulls. Compos A 2004;35:1091–105.
[8] Avgoulas EI, Sutcliffe MPF. Biomimetic-inspired joining of composite withmetal structures: a survey of natural joints and application to single lap joints.In: Proceedings of the SPIE smart structures and materials: bioinspiration,biomimetics, and bioreplication IV. San Diego, California: United States; 2014.p. 9–13.
[9] Vertech R, Parenti-Castelli V. Biologically inspired joints for innovativearticulations concepts. ESA research; 2012. Ariadna ID: 04/6401.
[10] Thomopoulos S, Williams GR, Gimbel JA, Favata M, Soslowsky LJ. Variation ofbiomechanical, structural, and compositional properties along the tendon tobone insertion site. J Orthop Res 2003;21:413–9.
[11] Benjamin M, Toumi H, Ralphs JR, Bydder G, Best TM, Milz S. Where tendonsand ligaments meet bone: attachment sites (‘entheses’) in relation to exerciseand/or mechanical load. J Anat 2006;208:471–90.
[12] Thomopoulos S, Genin GM, Galatz LM. The development and morphogenesis ofthe tendon-to-bone insertion – What development can teach us about healing.J Musculoskelet Neuronal Interact 2010;10(1):35–45.
[13] Thomopoulos S. The role of mechanobiology in the attachment of tendon tobone. IBMS BoneKEy 2011;8(6):271–85.
[14] Smith L, Thomopoulos S. Tendon/ligament-to-bone tissue engineering-currentand emerging strategies. US Musculoskeletal Rev 2011;6(1):11–5.
[15] Smeathers JE, Vincent JFV. Mechanical properties of mussel byssus threads. JMolluscan Stud 1979;45:219–30.
[16] Qin X, Waite JH. Exotic collagen gradients in the byssus of the mussel Mytilusedulis. J Exp Biol 1995;198(Pt 3):633–44.
[17] Gosline JM, Lillie M, Carrington E, Guerette PA, Ortlepp CS, Savage KN.Elatomeric proteins: biological roles and mechanical properties. Philos Trans RSoc London B 2002;357:121–32.
[18] Waite JH, Lichtenegger HC, Stucky GD, Hansma P. Exploring molecular andmechanical gradients in structural bioscaffolds. Biochemistry 2004;43(24):7653–62.
[19] Lichtenegger HC, Schöberl T, Ruokolainen J, Cross JO, Heald SM, Birkedal H,et al. Zinc and mechanical prowess in the jaws of Nereis, a marine worm. PNASUSA 2003;100:9144–9.
[20] Unden H, Ridder SO. Load-introducing armature as component part of alaminated structural element, 13 February 1985, US Patent 4,673,606; 1985.
[21] Melogranaa DJ, Grenestedt LJ. Improving joints between composites and steelusing perforations. Compos A 2002;33:1253–61.
[22] Hart-Smith LJ. Joints. engineered materials handbook. Composite structuresanalysis and design, vol. 1. Metal Parks, OH: ASM International; 1998. pp. 479-495.
[23] Panigrahi SK, Pradhan BJ. Three dimensional failure analysis and damagepropagation behaviour of adhesively bonded single lap joints in laminated FRPcomposites. Reinf Plast Compos 2007;26:183–201.
[24] Campilho RDSG, Banea MD, Neto JABP, da Silva LFM. Modelling adhesive jointswith cohesive zone models: effect of the cohesive law shape of the adhesivelayer. Int J Adhes Adhes 2013;44:48–56.

938 E.I. Avgoulas, M.P.F. Sutcliffe / Composite Structures 152 (2016) 929–938
[25] Anyfantis KN, Tsouvalis NG. A novel traction–separation law for the predictionof the mixed mode response of ductile adhesive joints. Int J Solids Struct2012;49:213–26.
[26] Campilho RDSG, Banea MD, Pinto AMG, da Silva LFM, de Jesus AMP. Strengthprediction of single- and double-lap joints by standard and extended finiteelement modelling. Int J Adhes Adhes 2011;31:363–72.
[27] Yosomiya R, Morimoto K, Nakajima A, Ikada Y, Suzuki T. Adhesion and bondingin composites. New York: Marcel Dekker; 1990.
[28] Comyn J. Adhesion science. Cambridge: Royal Society of Chemistry; 1997.[29] Peters ST. Handbook of composites. 2nd ed. London: Chapman & Hall; 1998.[30] Avgoulas EI, Sutcliffe MPF. Numerical and experimental investigation of CFRP
to perforated steel joints. In: Proceedings of the 20th international conferenceon composite materials. p. 9–24. Copenhagen, Denmark.
[31] Brambleby RJ, Louca LA, Mouring SE. Dynamic strength testing of perforatedsteel-GRP double lap joints. In: Proceedings of the 16th european conferenceon composite materials. p. 22–6. Seville, Spain.