Biomechanics of Locomotion Christine Bedore and Shannon Long.
22
Biomechanics of Locomotion Christine Bedore and Shannon Long
-
Upload
adrian-neal -
Category
Documents
-
view
216 -
download
0
Transcript of Biomechanics of Locomotion Christine Bedore and Shannon Long.
Biomechanics of Locomotion
Christine Bedore and Shannon Long

Forces• Gravity
– Downward force– Negatively buoyant due to lack of swim bladder– Large oily liver creates minor lift– Must create more lift to oppose
• Lift– Upward force– Bernoulli’s Principle: Decrease in pressure with increasing
velocity results in lift– Vortices
• Drag– Backward motion
• Thrust– Forward motion

Vortex
• What is it?: circulatory water flow resulting from water displacement
• Importance: show water flow resulting from force on water, shows how body and fins used in locomotion

Studies of Locomotion
• DPIV: Digital particle image velocimetry– Uses reflective beads and lasers– Shows waterflow due to movement
• 3D Kinematics– 2 cameras with mirrors to show lateral and ventral
movement– X,Y,Z graphs to show fin movement
• EMG: Electromyography– Patterns of muscle activation during locomotion– Uses electrodes attached to animal– Confirms active movement of body positioning in
pectorals during horizontal and vertical movements

Body Forms• Type 1: Fast-swimming
pelagic sharks– Conical head– Deep body– Large pectorals– Narrow caudal peduncle
with keels– High heterocercal tail
angle (Symm. like a tuna)
– Reduced pelvic, second dorsal, and anal
– Increase streamlining, and reduce drag
• Type 2: General continental swimmers– Heads conical on top,
flattened ventrally– Large pectorals– Low heterocercal tail
angle– No keels on peduncle– Pelvic, second dorsal
and anal fins moderately sized
– Highly maneuverable across wide ranges of speeds

• Type 3: Benthic slow-swimmers– Big heads with blunt
snout– Pelvic anterior, first
dorsal posterior– Low heterocercal tail
angle– Smaller/absent
hypochordal lobe and large subterminal lobe
• Type 4: Deep sea sharks (Dogfish)– No anal fin– Large epicaudal lobe– Grab-bag of other
characteristics
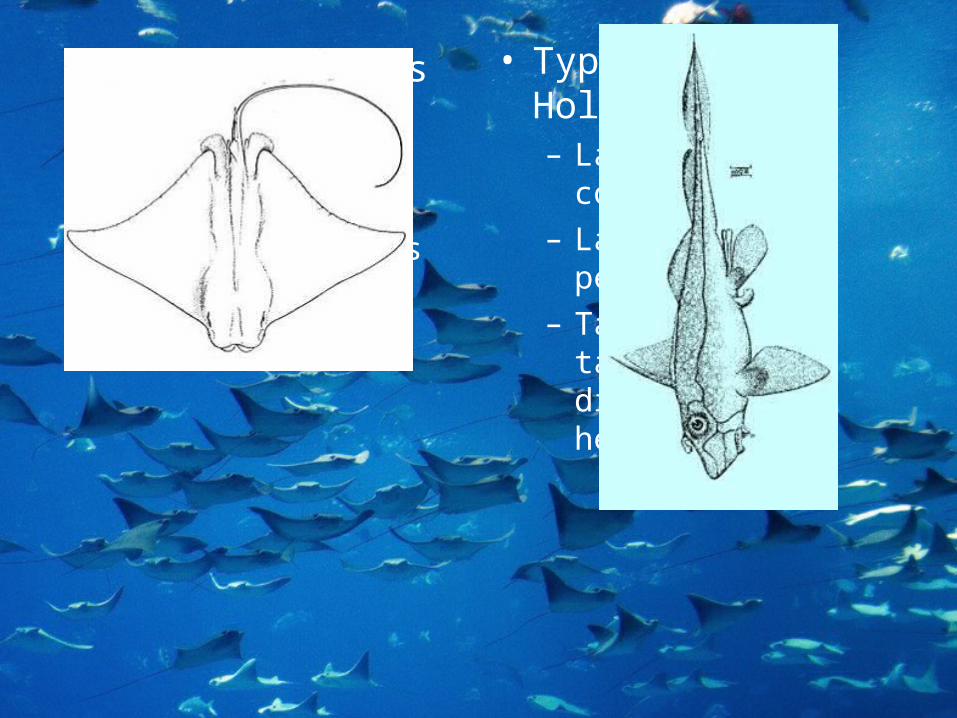
• Type 5: Batoids– Mostly benthic– Dorsoventrally
flattened– Large pectorals– Caudal half of body
reduced
• Type 6: Holocephalans– Laterally compressed– Large, broad pectorals– Tail long and tapering
or distinctly heterocercal

Locomotion Modes
• Sharks– use lateral undulations of axial skeleton– Mode 1: Anguilliform-Nurse Shark
• Entire trunk and tail move in more than one wave• Typically seen in sharks that are elongate and benthic
– Mode 2: Carangiform-Thesher Shark• Uses posterior half of body in less than one wave• Pelagic species
– Mode 3: Thunniform-Great White Shark• Only tail and caudal peduncle move• Pronounced in Lamnides

• Batoid– Appendage propulsion– Undulators
• Waves move down pectorals
• Benthic
– Oscillators• Flapping of pectorals
up and down• Pelagic
• Holocephalans– Combine oscillatory
and undulatory movements of pectorals

Body Angle of Attack (Horizontal movement)
• Upward in water = 22°
• Resting/Holding = 4-11°
• Down = -11°
• Angle varies with swimming speed– Slow speed equals higher angle– High speed equals lower angle
All angles specific to laboratory testing on bamboo and leopard sharks

Caudal Fin of Shark
• Used DPIV and 3D Kinematics• Moves in Figure-8 pattern• Top edge trails while bottom edge leads• Water is pushed down and back due to
tilted angle• Produces lift and thrust• DPIV used to show counter-clockwise and
clockwise flows which makes shark move forward and upward

Wilga and Lauder, 2004
• DPIV on dogfish shark
• Top lobe leads bottom lobe on caudal
• Forms ring within a ring vortex structure due to vortices being shed at different intervals
• 2 jets produced combine into one posteroventral jet

Caudal Fin of Skates and Rays
• Basal batoids use lateral tail undulation similar to sharks with a positive body angle of attack

Pectoral Fins of Sharks• Anatomy
– Aplesodic: flexible, used to ‘walk’– Plesodic: stiff, reduces drag
• Steady Swimming– Determined using 3D kinematics– NOT a hydrofoil– contrasts to airplane wings,
sharks have negative angles (does not create lift) and planes have positive (creates lift)
– Negative angle creates roll and de-stability

• Vertical movements– Determined with DPIV– Highly positive angles move shark upward in water,
small negative angles move shark down in water– In order to maneuver, flips posterior part of fin down
and anterior upward to produce lift– To move downward, flips posterior part of fin up and
anterior downward– Used to reorient head and body for maneuvering– When sinking, lower pectoral angle to help body
remain stable– Greater angles help maneuver

• Benthic Station-Holding– Head-first in current to reduce drag– Slower the water, the higher the angle– Faster the water, the lower the angle– Change their pectoral angles to make
negative lift, friction and combat downstream drag
– Sit concave up so water deflected up for a clockwise vortex (makes LOTS of negative lift)

Pectoral Fins of Skates and Rays
• Most batoids use strict undulation or oscillations• Undulatory
– Similar to rowing, making it drag-based– Efficient at slow speeds– Reduces drag– Highly maneuverable
• Oscillatory– ‘Flying’– Fast-cruising– Provides greater lift– Not as maneuverable

• Fully benthic rays– Low-amplitude waves – High-fin beat (number of waves)– More undulatory so lateral line usable– Do not cross ventral body axis
• Intermediate– Moderate amplitude– Moderate fin beat (number of waves)– Active benthic
• Fully pelagic rays– High-amplitude waves– Low-fin beat (number of waves)– Glide and preserve energy– Cross ventral body axis equally up and down

Pectoral Fins of Holocephalans
• Large, flexible
• Leading edge flapped
• Undulatory waves down fin

Diversity of Fin and Body Shape
• Threshers
• Oceanic Whitetips
• Hammerheads

SummaryShark
• Horizontal/Steady Swimming– Positive body angle– Caudal for lift and thrust– Pectorals create no lift
• Vertical Maneuvering– Positive/Negative body angle for rising or sinking– Pectorals change angle to rise or sink– Pectorals generate positive and negative lift
• Station-holding– Change body angle for flow rate– Pectorals held concave up to create negative lift

SummaryBatoids and Holocephalans
• Batoids– Most use appendage propulsion– Undulatory/oscillatory continuum
• Holocephalans are a combination of undulation and oscillation