
BEYOND SLIDING WINDOW:
17
BEYOND SLIDING WINDOW: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, and Thomas Hofmann
-
Upload
maxine-dyer -
Category
Documents
-
view
26 -
download
4
description
BEYOND SLIDING WINDOW:. Christoph H. Lampert, Matthew B. Blaschko, and Thomas Hofmann. Object Localization by Efficient Subwindow Search. Motivations. To localize the object without exhaustive search observation : often, only a small portion of the image contains the object of interest - PowerPoint PPT Presentation
Transcript of BEYOND SLIDING WINDOW:

BEYOND SLIDING WINDOW:Object Localization by Efficient Subwindow Search
Christoph H. Lampert, Matthew B. Blaschko, and Thomas Hofmann
MOTIVATIONS
To localize the object without exhaustive search observation : often, only a small portion of the
image contains the object of interest
To find a global optimum in a huge search space
Object detection and retrieval

CONTRIBUTIONS
Efficient (n^2 VS n^4) n^4 rectangles for an image n X n
n X n possible centers n possible choices for width & n for height n^4 rectangles
Optimal Versatile
arbitrary objects VS simple parametric objects in line drawings [4]
flexible in the choice of the cost function VS L2 distance [13]
Challenge To find optimal and tight bounds
BRANCH AND BOUND
first proposed by A. H. Land and A. G. Doig in 1960 for linear programming
a “divide and conquer” approach to optimize some cost function f(x)
recursively branching & bounding split S into subsets Si that min(f(x)) = min(vi) compute the lower & upper bounds of f(x) within
Si
pruning

METHODOLOGY Cost function Parameter space
Bounds
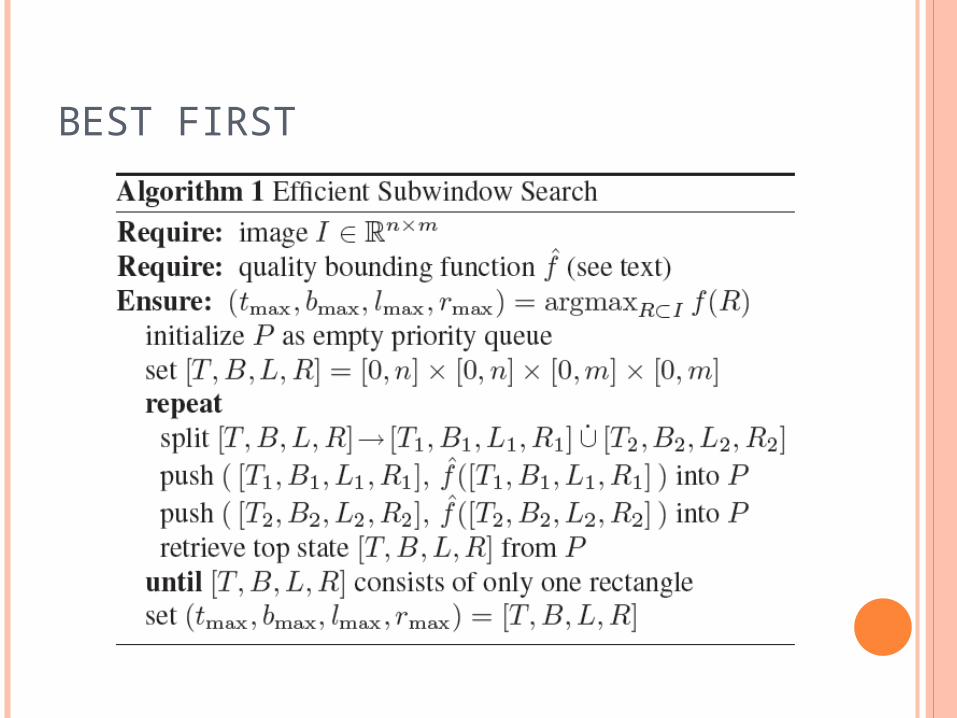
BEST FIRST

BOUNDING I
a bag of visual words for non-rigid objects histograms of SIFT prototypes SVM decision function
bounds
get the maximal amount of + and minimal amount of –
integral image makes evaluation O(1)
,
RESULTS
PASCAL VOC 06 5,304 images with 9,507 objects from 10
categories 1000 visual words from 50,000 SURF descriptors claim a match when > 50% overlap between the
detected bounding box and the ground truth
PASCAL VOC 2007 9,963 images with 24,640 objects
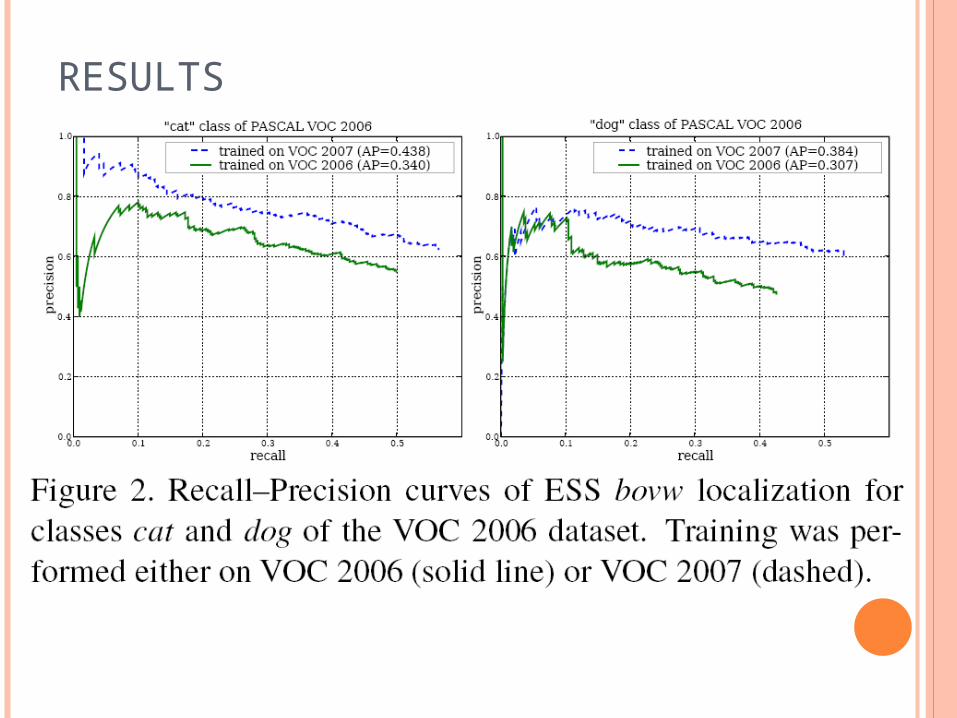
RESULTS
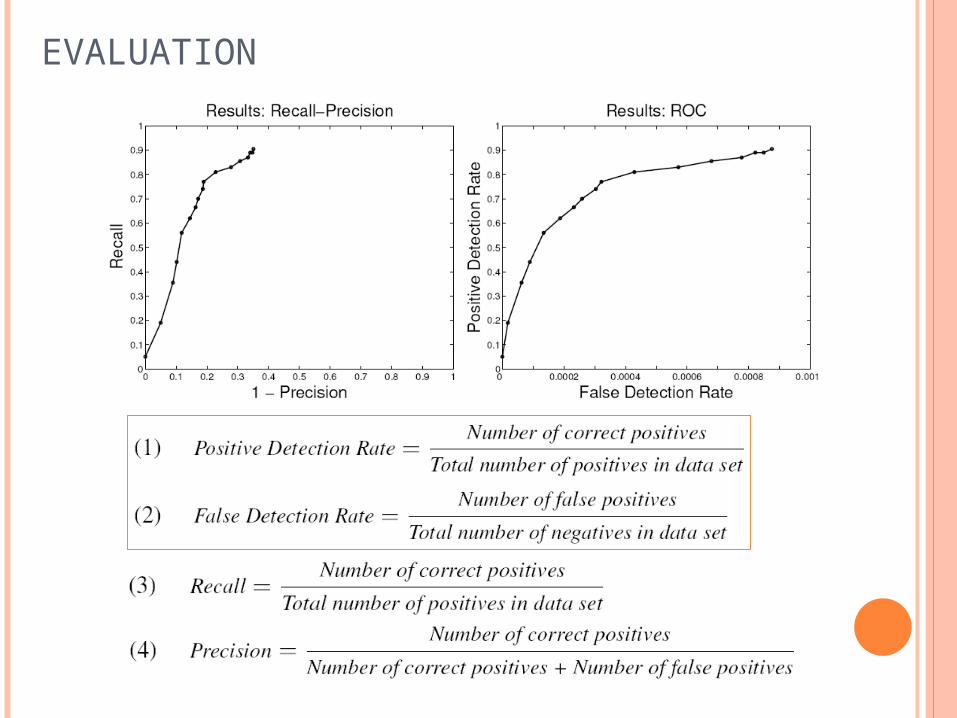
EVALUATION

SPEED
40ms per image on a 2.4 GHz PC

BOUNDING II
spatial pyramid for rigid objects histograms with spatial information Extensions with ESS (fine-grained pyramids) SVM decision function

RESULTS
UIUC Car database (side-view, one car per image) 1050 training (550 positive images) 277 test (170 single scale + 107 multi scale) 1000 visual words from 50,000 SURF descriptors

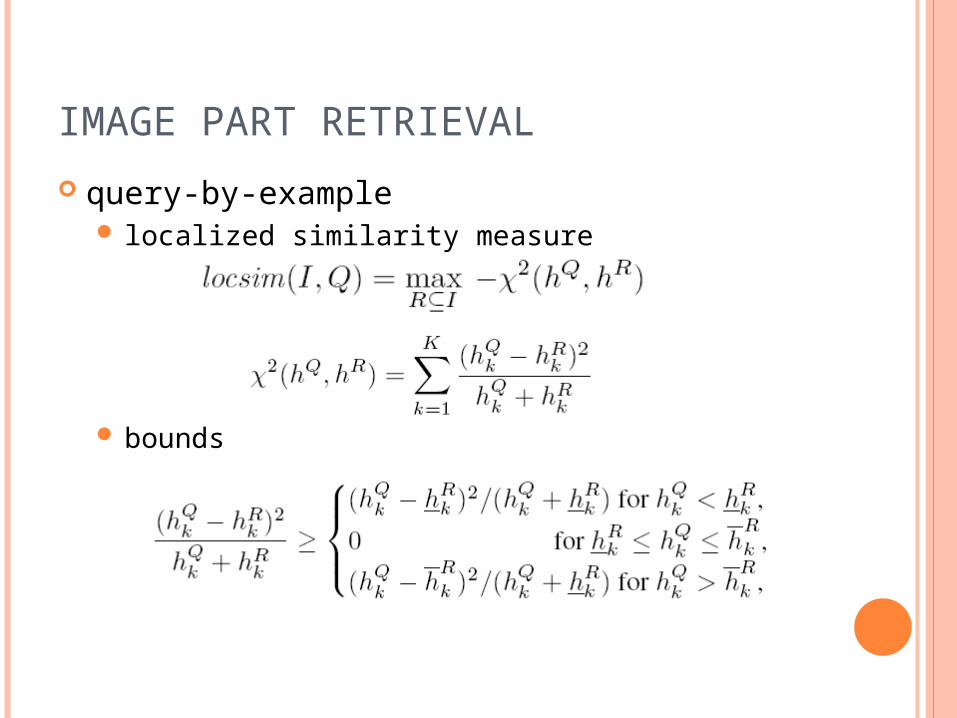
IMAGE PART RETRIEVAL
query-by-example localized similarity measure
bounds
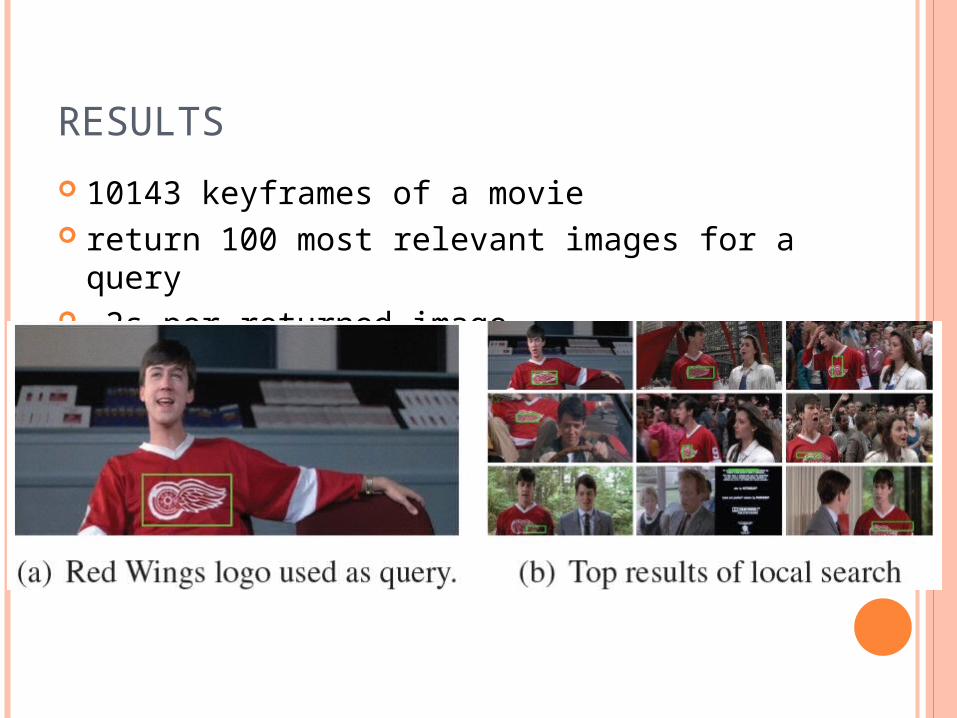
RESULTS
10143 keyframes of a movie return 100 most relevant images for a query 2s per returned image
CONCLUSIONS
high speed with global optimum
can be extended to multi-detections, other shapes, different cost functions


















![A Sliding Window-Based Algorithm for Detecting Leaders ...afariha/papers/[2015] A Sliding Window... · A Sliding Window-Based Algorithm for Detecting Leaders from Social Network Action](https://static.fdocuments.in/doc/165x107/5e06d96f4d6fba74fe2883e3/a-sliding-window-based-algorithm-for-detecting-leaders-afarihapapers2015.jpg)