Bernardo Kulnig Pagnoncelli Sample average approximation...
56
Bernardo Kulnig Pagnoncelli Sample average approximation for chance constrained programming TESE DE DOUTORADO Thesis presented to the Postgraduate Program in Mathemtics of the Departamento de Matem´ atica, PUC-Rio as partial fulfillment of the requirements for the degree of Doutor em Matem´ atica Adviser : Prof. Carlos Tomei Co–Adviser: Prof. Shabbir Ahmed Co–Adviser: Prof. Alexander Shapiro Co–Adviser: Prof. Humberto Jos´ e Bortolossi Rio de Janeiro February 2009
Transcript of Bernardo Kulnig Pagnoncelli Sample average approximation...

Bernardo Kulnig Pagnoncelli
Sample average approximation for chanceconstrained programming
TESE DE DOUTORADO
Thesis presented to the Postgraduate Program in Mathemtics ofthe Departamento de Matematica, PUC-Rio as partial fulfillmentof the requirements for the degree of Doutor em Matematica
Adviser : Prof. Carlos TomeiCo–Adviser: Prof. Shabbir AhmedCo–Adviser: Prof. Alexander ShapiroCo–Adviser: Prof. Humberto Jose Bortolossi
Rio de JaneiroFebruary 2009
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

Bernardo Kulnig Pagnoncelli
Sample average approximation for chanceconstrained programming
Thesis presented to the Postgraduate Program in Mathema-tics, of the Departamento de Matematica do Centro TecnicoCientıfico da PUC-Rio, as partial fulfillment of the requirementsfor the degree of Doutor.
Prof. Carlos Tomei
AdviserDepartamento de Matematica — PUC-Rio
Prof. Shabbir Ahmed
Co–AdviserH. Milton Stewart School of Industrial & Systems Engineering
— Georgia Institute of Technology
Prof. Alexander Shapiro
Co–AdviserH. Milton Stewart School of Industrial & Systems Engineering
— Georgia Institute of Technology
Prof. Humberto Jose Bortolossi
Co–AdviserInstituto de Matematica — UFF
Prof. Helio Cortes Vieira Lopes
Departamento de Matematica — PUC-Rio
Prof. Cristiano Fernandes
Departamento de Engenharia Eletrica — PUC-Rio
Prof. Alexandre Street
Departamento de Engenharia Eletrica — PUC-Rio
Prof. Helio dos Santos Migon
Instituto de Matematica — UFRJ
Prof. Beatriz Vaz de Melo Mendes
Instituto de Matematica — UFRJ
Prof. Roberto Imbuzeiro
IMPA
Prof. Jose Eugenio Leal
Coordenador Setorial do Centro Tecnico Cientıfico — PUC–Rio
Rio de Janeiro — February 3, 2009
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

All rights reserved.
Bernardo Kulnig Pagnoncelli
Bernardo Kulnig Pagnoncelli obtained his B.Sc. diploma inpure mathematics from PUC-Rio in 2002 and his M.Sc. titlein applied mathematics in 2004, with the dissertation “Ap-plications of the tensor product in numerical analysis”, underthe supervision of Carlos Tomei. He joined the Ph.D. programat PUC-Rio in March 2005 and was invited to spend 2007 atH. Milton Stewart School of Industrial Systems & EngineeringDepartment at the Georgia Institute of Technology (Atlanta,U.S.A.) by Professor Shabbir Ahmed, one of his co-advisers.
Bibliographic data
Pagnoncelli, Bernardo K.
Sample average approximation for chance constrainedprogramming / Bernardo Kulnig Pagnoncelli; adviser: CarlosTomei; co–adviser: Shabbir Ahmed et.al. – 2009.
53 f: il. ; 30 cm
Tese (Doutorado em Matematica) – Pontifıcia Universi-dade Catolica do Rio de Janeiro, Rio de Janeiro, 2009.
Inclui bibliografia.
1. Matematica – Teses. 2. Stochastic Programming. 3.Chance Constraints. 4. Sampling Methods. 5. Provisioningproblem. I. Tomei, Carlos. II. Ahmed, S.. III. PontifıciaUniversidade Catolica do Rio de Janeiro. Departamento deMatematica. IV. Tıtulo.
CDD: 510
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

A minha mulher Daniela e aos meus pais Dante e Zuza
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Acknowledgments
To my Adviser Carlos Tomei for the constant help and friendship during
those four years and for always challenging me to do my best. Thank you for
placing your bets on a different project and for believing in my potential.
To Shabbir Ahmed for the invitation to spend one year at Georgia
Tech under his supervision. Thank you for showing me how to do research
in stochastic programming and for all the support during my stay in Atlanta.
To Alexander Shapiro for participating so lively in my research project
and for always being available to answer my questions with infinite patience.
To Humberto Bortolossi for inviting me to join a series of weekly seminars
during my PhD, which were my very first contact with stochastic programming.
Thank you for all the collaboration we had during those four years and I hope
we will continue to work together for a long time.
To the members of my committee for the careful reading of the manus-
cript and for the the suggestions that certainly made the text clearer.
To Helder Inacio for helping me with computational issues on the thesis
that made my life a lot easier. Many thanks for listening carefully to me while
I spoke about my work and for the suggestions of improvement of the text.
Thank you for the friendship during my stay at Georgia Tech and for the
uncountable soccer matches.
To Ricardo, Marta and Felipe Fukasawa for everything they did for me
and for my wife during our stay in Atlanta. Your help, advice and friendship
were very important to us and without them our life at Georgia Tech would
have been harder and less funny.
To Felipe Pina and Marcos Lage for the help and suggestions that
contributed directly to the improvement of the thesis.
To all the great friends I made in Atlanta: Yao-Hsuan Chen, Claudio
Santiago, Daniel Faissol, Eliana & Jim, Luiz & Diana, Roberto & Mariana,
Luciano & Denise, Danny & Johnny, Daniel & Lıvia and Lili.
To all my friends at PUC for the support and friendship, in particular
Miguel Schnoor, Aldo Ferreira da Silva, Renato Zanforlin (in memoriam),
Eduardo Teles, Guilherme Frederico Lima, Regina Fukuda, Joao Romanelli,
Jose Cal Neto, Yuri Ki, Jessica Kubrusly, Juliana Valerio, Kennedy Pedroso,
Renato Adelino, Andre Carneiro, Marina Dias, Debora Mondaini, Carlos
Penafiel, Ines de Oliveira, Fabio de Souza, Joao Domingos, Lhaylla Crissaff,
Luiz Felipe Franca.
To all the Professors of the Mathematics Department at PUC-Rio for the
inestimable contribution to my education, specially Fred Palmeira.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

To my friends Diogo Haddad, Diogo Montes, Paula Abreu, Leandro
& Tatiana, Flavia Cordeiro, Beatriz Malajovich, Tania Vasconcelos, Sergio
Almaraz, Lucas Sigaud and Priscila Almeida.
To my grandmother Deliza Pagnoncelli and to my brother Eduardo
Pagnoncelli for always thinking I was doing something important.
To Neia for tolerating me all those years and for providing me my every
day food.
To my family and my wife’s family for the constant support.
To the staff of the Mathematics Department at PUC-Rio Katia, Creuza,
Ana, Orlando and Otavio for always being so nice to me.
To PUC-Rio, FUNENSEG and CAPES for the financial support.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Abstract
Pagnoncelli, Bernardo K.; Tomei, Carlos; Ahmed, S.; Shapiro,A.; Bortolossi, Humberto Jose. Sample average approximation
for chance constrained programming. Rio de Janeiro, 2009.53p. TESE DE DOUTORADO — Department of Mathematics,Pontifıcia Universidade Catolica do Rio de Janeiro.
We study sample approximations of chance constrained problems through
the sample average approximation (SAA) approach and prove the related
convergence properties. We discuss how to use the SAA method to obtain
good candidate solutions and bounds for the optimal value of the original
problem. In order to tune the parameters of SAA, we apply the method
to two chance constrained problems. The first is a linear portfolio selection
problem with returns following a multivariate lognormal distribution. The
second is a joint chance constrained version of a simple blending problem.
We conclude with a more demanding application of SAA methodology to
the determination of the minimum provision an economic agent must have
in order to meet a series of future payment obligations with sufficiently high
probability.
Keywords
Stochastic Programming. Chance Constraints. Sampling Methods.
Provisioning problem.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Resumo
Pagnoncelli, Bernardo K.; Tomei, Carlos; Ahmed, S.; Shapiro, A.;Bortolossi, Humberto Jose. Metodo da aproximacao amostral
para restricoes probabilısticas. Rio de Janeiro, 2009. 53p.Tese de Doutorado — Departamento de Matematica, PontifıciaUniversidade Catolica do Rio de Janeiro.
Estudamos aproximacoes amostrais de problemas com restricoes proba-
bilısticas atraves da aproximacao pela media amostral (SAA) e demons-
tramos as propriedades de convergencia relacionadas. Utilizamos SAA para
obter bons candidatos a solucao e cotas estatısticas para o valor otimo
do problema original. Para ajustar corretamente parametros, aplicamos o
metodo a dois problemas com restricoes probabilısticas. O primeiro e um
problema de selecao de portfolio linear com retornos seguindo uma distri-
buicao lognormal multivariada. O segundo e uma versao com restricoes pro-
babilısticas conjuntas de um problema da mistura simplificado. Concluımos
com uma aplicacao mais exigente ao problema de se determinar a provisao
mınima que um agente economico deve ter de forma a satisfazer uma serie
de obrigacoes futuras com probabilidade suficientemente alta.
Palavras–chave
Otimizacao Estocastica. Restricoes Probabilısticas. Metodos Amos-
trais. Problema de Reserva.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Contents
1 Introduction 11
2 Chance constrained programming 15
2.1 An example 152.2 Single and joint constraints 162.3 Some properties and special cases 18
3 Sample Average Approximation 21
3.1 Theoretical background for SAA 21
4 Two applications of SAA 27
4.1 Portfolio problem 274.2 A blending problem 35
5 From separated to joint variables: the hurdle-race problem 39
5.1 The hurdle-race problem and comonotonicity 405.2 The joint hurdle-race problem 415.3 Stochastic hurdles 44
6 Conclusion 47
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Ah! Doutor! Doutor!... Era magico o tıtulo,
tinha poderes e alcances multiplos, varios, po-
liformicos... Era um pallium, era alguma coisa
como clamide sagrada, tecida com um fio
tenue e quase imponderavel, mas a cujo en-
contro os elementos, os maus olhares, os exor-
cismos se quebravam. De posse dela, as go-
tas de chuva afastar-se-iam transidas do meu
corpo, nao se animariam a tocar-me nas rou-
pas, no calado sequer. O invisvel distribui-
dor dos raios solares escolheria os mais mei-
gos para me aquecer, e gastaria os fortes, os
inexoraveis, com o comum dos homens que
nao e doutor. Oh! Ser formado, de anel no
dedo, sobrecasaca e cartola, inflado e grosso,
como um sapo antes de ferir a martelada a
beira do brejo; andar assim pelas ruas, pelas
pracas, pelas estradas, pelas salas, recebendo
cumprimentos: Doutor, como passou? Como
esta, doutor? Era sobre-humano!...
Lima Barreto, Recordacoes do Escrivao Isaıas Caminha.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

1
Introduction
The field of stochastic programming is mainly concerned with the deve-
lopment of models and algorithms for optimization problems with uncertainty.
More often than not the constants of an optimization problem are only ap-
proximations of measured quantities that could hardly be known to high ac-
curacy. For instance in [BN], the authors analyze the set of problems of the
well-known NETLIB library and perform their sensitivity analysis. Using robust
optimization techniques, they show that feasibility of the usual optimal solu-
tion of linear programs can indeed be heavily affected by small perturbations
in problem data.
The first publications in the field of stochastic programming appeared
in the 1950’s [BEA], [DAN], [CCS]. The subject received moderate attention
until the early nineties, when an explosion in the number of publications took
place. Stochastic programming is a powerful tool to deal with uncertainty and,
unlike other approaches such as robust optimization, models the coefficients
as random variables with known joint distribution. From the point of view
of applications, such assumption may be quite demanding, specially if there
is not enough data to correctly approximate the distribution of parameters.
However, in some cases one does not need to have a complete knowledge
of the distribution of the parameters. It is enough, instead, to have an
algorithm which generates samples from the random variables in the problem.
Furthermore, we believe that in most situations even a subjective choice of the
joint distribution serves the decision maker well.
There are two main approaches to stochastic programming: two-stage
problems with recourse and chance constrained programming. In two-stage
models, the decision maker chooses an action in the present without knowing
the outcome of future events. After the uncertainty is revealed, he then
takes the best possible recourse action to (possibly) correct the unwanted
consequences of his first decision. Deviations from the goals are penalized
by the objective function. Such framework has applications in several fields
such as finance [AHM], electricity generation [LS],[PP], hospital budgeting
[KQ], production planning [PBK], etc. We refer the reader to [SR] for a
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

detailed discussion of the theoretical properties and more examples of two-
stage problems. Among the efficient algorithms which deal with two-stage
problems, one of the most popular is the L-shaped method, which is essentially
Benders decompositions applied to the so-called extensive form of a two-stage
problem (see [HV], [BP]). Other important methods based on sampling are
the Stochastic Decomposition ([HS]) and the sample average approximation
for two-stage problems ([LSW]).
The second approach, which is the focus of this thesis, is chance cons-
trained programming, sometimes referred to as probabilistic programming. The
subject was introduced by Charnes, Cooper and Symmonds [CCS] and have
been extensively studied since. For a theoretical background we may refer to
Prekopa [PREb] where an extensive list of references can be found. Applica-
tions include, e.g., water management [DGKS], soil management [ZTSK] and
optimization of chemical processes [HLMS],[HM].
In chance constrained programming, the decision maker is interested in
satisfying his goal “most of the time”, that is, he admits constraint violation
for some realizations of the random events. While two-stage problems penalize
deviations from goals, chance constrained programming considers only the
possibility of infeasibility, regardless of the amount by which the constraints
are violated. In other words, the former approach measures risk quantitatively
while the latter does it qualitatively. We consider problems of the form
Minx∈X
f(x)
s.t. Prob{
G(x, ξ) ≤ 0}
≥ 1 − ε,(1-1)
where X ⊂ Rn, ξ is a random vector1 with probability distribution P supported
on a set Ξ ⊂ Rd, constraints are expressed through G : R
n × Ξ → Rm,
f : Rn → R is the objective function and ε ∈ (0, 1) is the reliability level.
Although chance constraints were introduced almost 50 years ago, little
progress was made until recently. Even for simple functions G(·, ξ), e.g., linear,
problem (1-1) may be extremely difficult to solve numerically. One of the
reasons is that for a given x ∈ X the quantity Prob {G(x, ξ) ≤ 0} requires
a multi-dimensional integration. Thus, it may happen that the only way to
check feasibility of a point x ∈ X is by Monte-Carlo simulation. Moreover,
convexity of X and of G(·, ξ) does not imply the convexity of the feasible set
of problem (1-1).
That led to two somewhat different directions of research. One consists of
discretizing the probability distribution P and solving the related combinato-
1We use the same notation ξ to denote a random vector and its particular realization.
Which of these two meanings will be used will be clear from the context.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

rial problem (see, e.g., [DPR], [LAN]). Another approach is to employ convex
approximations of chance constraints ([NS]). As active members in this lines
of research, A. Shapiro and S. Ahmed have been working recently in the the-
ory of sampling and simulation applied to chance constrained programming.
The sample average approximation (SAA) studied in this thesis is a sampling
method for joint chance constrained problems or problems with a single chance
constraint. The approach is natural, and, as will be seen, it is a flexible tool
which can alleviate several difficulties such as non-convexity and the intracta-
bility of the probabilistic constraint.
In the third year of my doctorate in Atlanta, Ahmed and Shapiro
introduced me to some theoretical aspects of SAA, and we proceeded to clarify
foundations in order to advance to interesting applications. Ahmed’s previous
supervision of J. Luedtke [LA] gave rise to convergence results of SAA on
specific scenarios, which were then used on probabilistic versions of the set
covering and transportation problems. In this text we continue this path with
the following contributions: first, the theoretical results vindicate the numerical
approximations; then we provide further empirical evidence on how to choose
the parameters involved in SAA and how to use it to solve chance constrained
problems. Part of this material may be found in [PAS].
Chapter 2 contains some basic results about chance constrained pro-
blems, with emphasis on hypotheses leading to the convexity of the feasible
set. In Chapter 3 we provide theoretical background and present the main re-
sults about sample approximations of (1-1). We state and prove convergence
results and describe how to construct bounds for the optimal value of chance
constrained programs.
In Chapter 4, we apply SAA to two rather simple problems, which
allow for verification of our methods. The first is a linear portfolio selection
problem with 10 assets, in the spirit of Markowitz ([MAR]). We consider two
very distinct situations: the distribution of the returns of the assets is either
multivariate normal or lognormal. In the first case, the explicit solution is well
known: we use it as a benchmark to our numerics. The second problem is a
simple blending problem modeled as a joint chance constrained problem, for
which, again, the explicit solution is known.
In Chapter 5 we turn our attention to a more realistic problem arising
from actuarial sciences, the hurdle-race problem, proposed in [VDGK]. It
consists of a decision maker who needs to determine the current capital
(provision) required to meet future obligations. Furthermore, for each period
separately he needs to keep his capital above given thresholds, the hurdles,
with high probability. In [VDGK], the authors make use of comonotonicity
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

([DDGa], [DDGb]) to obtain candidate solutions to the problem.
I contacted S. Vanduffel, the corresponding author of [VDGK], and
proposed a variant of the hurdle-race problem, the joint hurdle-race problem.
Instead of separate hurdles, the decision maker has to pass the whole collection
of hurdles with high probability. This phrasing is clearly more adequate from
an actuarial point of view. Comonotonicity cannot be easily applied to the joint
version, but SAA yields good candidate solutions to the problem. Both models
are compared in the original hurdle-race format, and numerical evidence of the
robustness of the joint formulation is provided in Section 5.2.1.
In addition, we extend the formulation to include stochastic hurdles, so
that the hurdles itself are not known at (known) future times and depend on
discounted values of futures obligations at the risk free rate. Although the
model becomes more involved, SAA handles the extension by essentially the
same computational cost.
Chapter 6 concludes the thesis with a summary of the results and future
directions of research.
We use the following notation throughout the text. The integer part of
number a ∈ R is denoted by ⌊a⌋. By Φ(z) we denote the cumulative distribution
function (cdf) of standard normal random variable and by zε the corresponding
ε−quantile, i.e., Φ(zε) = 1−ε, for ε ∈ (0, 1). The cdf B(k; p, N) of the binomial
distribution is
B(k; p, N) :=∑
k
i=0
(
N
i
)
pi(1 − p)N−i, k = 0, ..., N. (1-2)
For sets A, B ⊂ Rn we denote by
D(A, B) := supx∈A dist(x, B) (1-3)
the deviation of set A from set B.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

2
Chance constrained programming
In this Chapter we give a brief introduction to chance constrained
programming. The goals are to motivate the subject and to give the reader an
idea of the related difficulties. All proofs are omitted: we indicate references
where rigorous deductions can be found.
2.1
An example
At the risk of being repetitive, we start giving an example from [HV] of a
simple chance constraint that illustrates one of the difficulties associated with
this formulation. The simplicity of the example makes it essentially unique.
For x1, x2 ∈ R, ε ∈ [0, 1], let
p(x) = Prob{ξx1 + x2 ≥ 7} ≥ 1 − ε
be a chance constraint, where ξ is uniformly distributed in [0, 1], with cumu-
lative distribution
F (t) =
0, if t ∈ (−∞, 0),
t, if t ∈ [0, 1],
1 otherwise.
In the general framework defined in (1-1), we have
G(x, ξ) = −ξx1 − x2 + 7. (2-1)
We are interested in an explicit representation of the set
C(ε) = {(x1, x2) ∈ R2 : p(x) ≥ 1 − ε}. (2-2)
If x1 = 0, we clearly need to have x2 ≥ 7. If x1 > 0,
p(x) = P (ωx1 + x2 ≥ 7) = P
(
ω ≥7 − x2
x1
)
= 1 − F
(
7 − x2
x1
)
. (2-3)
Thus,
p(x) ≥ 1 − ε ⇔ F−1(ε)x1 + x2 ≥ 7.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

0 10-10
α = 0.3
10
14
5
Figure 2.1: The set C(0.3).
5
10
0 10-10
α = 0.7
Figure 2.2: The set C(0.7).
Proceeding in an analogous way for the case x1 < 0, we end up with
C(ε) = C+(ε)⋃
C0(ε)⋃
C−(ε), where
C+(ε) ={
x ∈ R2 | x1 > 0, F−1(ε)x1 + x2 ≥ 7
}
,
C0(ε) ={
(0, x2) ∈ R2 | x2 ≥ 7
}
,
C−(ε) ={
x ∈ R2 | x1 < 0, x1F
−1(1 − ε) + x2 ≥ 7}
.
Figures 2.1 and 2.2 show the sets C(0.3) and C(0.7).
Clearly, from Figure 2.2, one cannot expect to have convex feasible sets
for chance constrained programs even for linear functions G. Convexity is
restored by requiring additional hypothesis, as shown below.
2.2
Single and joint constraints
There are essentially two ways of writing a chance constrained model. We
can have several separated constraints, each one representing one goal. Formu-
lation (1-1) represent the situation of a single separated chance constraint,
which is amenable to the SAA approach we discuss later. A general separated
chance constrained problem can be written as follows.
minx∈X
f(x)
s.t. pi(x) := Prob{
Gi(x, ξ) ≤ 0}
≥ 1 − εi, i = 1, . . . , m,(2-4)
where εi ∈ [0, 1]. A point x is feasible to problem (2-4) if it belongs to the set
C(ε1, ε2, . . . , εm) =
m⋂
i=1
Ci(εi),
where
Ci(εi) ={
x ∈ Rn | pi(x) ≥ 1 − εi
}
.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Another possibility is having a number of constraints modeled as a single
one as follows.
Minx∈X
f(x)
s.t. p(x) := Prob{
G1(x, ξ) ≤ 0, G2(x, ξ) ≤ 0, . . . , Gm(x, ξ) ≤ 0}
≥ 1 − ε,
(2-5)with ε ∈ [0, 1]. Formulation (2-5) is refereed to as a joint chance constrained
problem since all the constraints Gi(x, ξ) ≤ 0 are taken jointly. A point x is
feasible to problem (2-5) if it belongs to the set
C(ε) ={
x ∈ Rn | p(x) ≥ 1 − ε
}
.
From a modeling point of view, sometimes it makes sense to model all the
constraints jointly if they together describe one goal. In [HEN], the author
presents a cash matching problem using both separated and joint chance
constraints. He compares the robustness of both formulations in the financial
context and performs experiments showing the difference between the two
approaches. We will have the opportunity to compare both formulations when
we discuss the joint hurdle-race problem in Chapter 5.
Joint chance constrained problems are usually hard to solve because
the joint expression in (2-5) requires a multidimensional integration to be
computed. Even checking feasibility for a given candidate solution cannot be
done easily and Monte-Carlo is required. There are some algorithms available
for those problems such as Szantai’s method ([HV]) or the solvers PCSPIOR,
PROCON and PROBALL [KM], but they are restricted to multivariate normal
distributions. Furthermore, they only deal with linear chance constraints with
constant technology matrix [HV]. Other examples of algorithms are the SUMT
and the supporting hyperplane method, described in detail in Chapter 5 of
[PREa].
There is an interesting result linking the two formulations.
Theorem 1 Let (2-5) be a joint chance constrained problem with reliability
level ε. If we choose reliability levels εi = 1 − (1 − ε)/m, i = 1, . . . , m for the
separated problem (2-4), then
m⋂
i=1
Ci
(
1 −1 − ε
m
)
⊂ C(ε),
that is, any feasible solution to the separated problem is feasible for the joint
problem for a suitable choice of reliability levels εi.
Proof. The result follows directly from Bonferroni inequality [HV].
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

We can convert any joint chance constrained problem such as (2-5) into
the form (1-1) by using the max-function as follows.
Minx∈X
f(x)
s.t. Prob{
maxi=1...,n
{
Gi(x, ξ)}
≤ 0}
≥ 1 − ε.(2-6)
It is straightforward to check that problems (2-6) and (2-5) are equivalent.
Of course in some cases desired properties of the considered functions may be
destroyed, but convexity is preserved and if the functions Gi(·, ξ) are linear we
still can write (2-6) as a linear program. We will see an explicit example of
such operation when we discuss the blending problem.
2.3
Some properties and special cases
The following result gives basic properties of feasible sets of chance
constrained problems.
Theorem 2 a) Let p(x) be defined as in (2-5). We have that p(x) is upper
semicontinuous, that is
p(x) ≥ lim supy→x
p(y), x ∈ Rn,
and thus the set C(ε) is a closed set for all ε ∈ [0, 1].
b) The set C(ε) is nondecreasing: if 0 ≤ ε1 < ε2 ≤ 1, then C(ε1) ⊂ C(ε2).
In addition, C(1) = Rn and C(ε) 6= ∅ for all ε ∈ [0, 1] if and only if the
set C(0) is non empty.
Part b) is trivial. A proof of part a) can be found in [HV].
As shown in Section 2.1, the feasible set of a chance constrained problem
in general is not convex. However, there are results establishing convexity under
certain hypothesis on the function G and on the density function of the random
vector ξ. The most important is due to Prekopa and Borell ([PREa]) and is
stated without proof.
Theorem 3 Assume the random vector ξ has a continuous probability distri-
bution with density function f . The following statements hold:
a) If log f is concave (with log 0 = −∞), or
b) If f−1/m is convex (with 0−1/m = ∞),
then the cumulative distribution function F is quasi-concave and hence C(ε)
is a convex set for all ε ∈ [0, 1].
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Fortunately, there are several important distributions that satisfy the hypothe-
sis of Theorem 3. We give two examples:
– Uniform distribution. Let D be a convex subset of Rn with finite measure
|D|. The probability density function is given by
f(x) =
{
1|D|
if x ∈ D,
0 if x /∈ D.
– Normal distribution. The probability density function is defined by
f(x) =1
√
|Σ|(2π)n
2
exp− 1
2(x−µ)T Σ−1(x−µ), x ∈ R
n,
where µ is the expectation vector, Σ the covariance matrix of the
distribution and |Σ| is the determinant of Σ.
Other examples are the (multivariate) Beta and Gamma distributions. More
examples can be found in [PREa].
In the case the random variable ξ is discretely distributed, we can
formulate problem (1-1) as a mixed-integer linear program. Let us assume
Prob{ξ = ξk} = pk, k = 1, . . . , K. Problem (1-1) becomes
Minx∈X
f(x)
s.t.∑K
k=1 pk1l(−∞,0)(G(x, ξk)) ≥ 1 − ε,(2-7)
or, equivalently,
Minx∈X
f(x)
s.t.∑K
k=1 pk1l(0,∞)(G(x, ξk)) ≤ ε,(2-8)
Consider the following mixed-integer program.
Minx∈X
f(x)
s.t. G(x, ξk) − Mzk ≤ 0, k = 1, . . . , K,∑K
k=1 pkzk ≤ ε,
z ∈ {0, 1}K,
(2-9)
where M is a sufficiently large constant. We claim that (2-8) and (2-9) are
equivalent. Indeed, let (x, z1, . . . , zk) be a solution of problem (2-9). The
first constraint of (2-9) tells us that zk ≥ 1l(0,∞)(G(x, ξk)). From the second
constraint of (2-9) we have
ε ≥K
∑
k=1
pkzk ≥K
∑
k=1
pk1l(0,∞)(G(x, ξk)),
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

which implies that x is feasible for (2-8), with same objective value. Conversely,
let x be feasible for problem (2-8) and define zk := 1l(0,∞)(G(x, ξk)). We have
that (x, z1, . . . , zk) is feasible for (2-9) with same objective value, and thus both
problems are equivalent.
We conclude with a convexity result for discrete distributions. A proof
can be found in [KW].
Proposition 4 Consider problem (2-5) with discrete distribution, that is, let
pk = Prob{ξ = ξk}, k = 1, . . . , K. Then for
ε < mink=1...,K
{pk}
the feasible set C(ε) is convex.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

3
Sample Average Approximation
We have seen in Chapter 2 that chance constrained problems are usually
hard to solve and explicit solutions are only available in very particular cases.
The main idea of SAA is to replace the original problem by an approximate
problem obtained via sampling from the distribution of the original problem.
We claim that good candidate solutions and bounds on the true optimal
value can be obtained by solving such approximations. We start with the
theoretical background for the method, stating and proving consistency results.
The discussion follows [PAS].
3.1
Theoretical background for SAA
As stated in Chapter 1, we consider chance constrained problems
Minx∈X
f(x)
s.t. Prob{
G(x, ξ) ≤ 0}
≥ 1 − ε.(3-1)
In order to simplify the presentation we assume in this section that the
constraint function G : Rn × Ξ → R is real valued. Of course, a number
of constraints Gi(x, ξ) ≤ 0, i = 1, . . . , m, can be equivalently replaced by one
constraint with the max-function as discussed in (2-6). We assume that the
set X is closed, the function f(x) is continuous and the function G(x, ξ) is a
Caratheodory function, i.e., G(x, ·) is measurable for every x ∈ Rn and G(·, ξ)
continuous for a.e. ξ ∈ Ξ.
Problem (3-1) can be written in the following equivalent form
Minx∈X
f(x) s.t. p(x) ≤ ε, (3-2)
where
p(x) := P{G(x, ξ) > 0}.
Now let ξ1, . . . , ξN be an independent identically distributed (iid) sample of N
realizations of random vector ξ and PN := N−1∑N
j=1 ∆(ξj) be the respective
empirical measure. Here ∆(ξ) denotes measure of mass one at point ξ, and
hence PN is a discrete measure assigning probability 1/N to each point ξj,
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

j = 1, . . . , N . The sample average approximation pN(x) of function p(x) is
obtained by replacing the ‘true’ distribution P by the empirical measure PN .
That is, pN(x) := PN{G(x, ξ) > 0}. Let 1l(0,∞) : R → R be the indicator
function of (0,∞), i.e.,
1l(0,∞)(t) :=
{
1, if t > 0,
0, if t ≤ 0.
Then we can write that p(x) = EP [1l(0,∞)(G(x, ξ))] and
pN(x) = EPN[1l(0,∞)(G(x, ξ))] =
1
N
N∑
j=1
1l(0,∞)
(
G(x, ξj))
.
That is, pN(x) is equal to the proportion of times that G(x, ξj) > 0. The
problem, associated with the generated sample ξ1, . . . , ξN , is
Minx∈X
f(x) s.t. pN(x) ≤ γ. (3-3)
We refer to problems (3-2) and (3-3) as the true and SAA problems, respec-
tively, at the respective significance levels ε and γ. Note that, following [LA]
and [PAS], we allow the significance level γ ≥ 0 of the approximate problem to
be different from the significance level ε of the true problem. Next we discuss
the convergence of a solution of the SAA problem (3-3) to that of the true
problem (3-2) with respect to the sample size N and the significance level γ. A
convergence analysis of problem (3-3) has been given in [LA]. Here we present
complementary results under slightly different assumptions.
Recall that a sequence fk(x) of extended real valued functions is said to
epiconverge to a function f(x), written fke→ f , if for any point x the following
two conditions hold: (i) for any sequence xk converging to x one has
lim infk→∞
fk(xk) ≥ f(x), (3-4)
(ii) there exists a sequence xk converging to x such that
lim supk→∞
fk(xk) ≤ f(x). (3-5)
Note that by the (strong) Law of Large Numbers (LLN) we have that for any
x, pN(x) converges w.p.1 to p(x).
Proposition 5 Let G(x, ξ) be a Caratheodory function. Then the functions
p(x) and pN(x) are lower semicontinuous, and pNe→ p w.p.1. Moreover,
suppose that for every x ∈ X the set {ξ ∈ Ξ : G(x, ξ) = 0} has P -measure zero,
i.e., G(x, ξ) 6= 0 w.p.1. Then the function p(x) is continuous at every x ∈ X
and pN(x) converges to p(x) w.p.1 uniformly on any compact set C ⊂ X, i.e.,
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

supx∈C
|pN(x) − p(x)| → 0 w.p.1 as N → ∞. (3-6)
Proof. Consider function ψ(x, ξ) := 1l(0,∞)
(
G(x, ξ))
. Recall that p(x) =
EP [ψ(x, ξ)] and pN(x) = EPN[ψ(x, ξ)]. Since the function 1l(0,∞)(·) is lower
semicontinuous and G(·, ξ) is a Caratheodory function, it follows that the
function ψ(x, ξ) is random lower semicontinuous1 (see, e.g., [RW, Proposition
14.45]). Then by Fatou’s lemma we have for any x ∈ Rn,
lim infx→x p(x) = lim infx→x
∫
Ξψ(x, ξ)dP (ξ)
≥∫
Ξlim infx→x ψ(x, ξ)dP (ξ) ≥
∫
Ξψ(x, ξ)dP (ξ) = p(x).
This shows lower semicontinuity of p(x). Lower semicontinuity of pN (x) can
be shown in the same way.
The epiconvergence pNe→ p w.p.1 is a direct implication of Artstein and
Wets [AW, Theorem 2.3]. Note that, of course, |ψ(x, ξ)| is dominated by an
integrable function since |ψ(x, ξ)| ≤ 1.
Suppose, further, that for every x ∈ X, G(x, ξ) 6= 0 w.p.1, which
implies that ψ(·, ξ) is continuous at x w.p.1. Then by the Lebesgue Dominated
Convergence Theorem we have for any x ∈ X,
limx→x p(x) = limx→x
∫
Ξψ(x, ξ)dP (ξ)
=∫
Ξlimx→x ψ(x, ξ)dP (ξ) =
∫
Ξψ(x, ξ)dP (ξ) = p(x).
This shows that p(x) is continuous at x = x. Finally, the uniform convergence
(3-6) follows by a version of the uniform Law of Large Numbers (see, e.g.,
[SHA, Proposition 7, p.363]).
By lower semicontinuity of p(x) and pN(x) we have that the feasible
sets of the ‘true’ problem (3-2) and its SAA counterpart (3-3) are closed sets.
Therefore, if the set X is bounded (i.e., compact), then problems (3-2) and (3-
3) have nonempty sets of optimal solutions denoted, respectively, as S and SN ,
provided that these problems have nonempty feasible sets. We also denote by
ϑ∗ and ϑN the optimal values of the true and the SAA problems, respectively.
The following result shows that for γ = ε, under mild regularity conditions,
ϑN and SN converge w.p.1 to their counterparts of the true problem.
We make the following assumption.
(A) There is an optimal solution x of the true problem (3-2) such that for
any ε > 0 there is x ∈ X with ‖x− x‖ ≤ ε and p(x) < ε.
1Random lower semicontinuous functions are called normal integrands in [RW].
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

In other words the above condition (A) assumes existence of a sequence
{xk} ⊂ X converging to an optimal solution x ∈ S such that p(xk) < ε
for all k, i.e., x is an accumulation point of the set {x ∈ X : p(x) < ε}.
Proposition 6 Suppose that the significance levels of the true and SAA
problems are the same, i.e., γ = ε, the set X is compact, the function f(x) is
continuous, G(x, ξ) is a Caratheodory function, and condition (A) holds. Then
ϑN → ϑ∗ and D(SN , S) → 0 w.p.1 as N → ∞.
Proof. By the condition (A), the set S is nonempty and there is x ∈ X
such that p(x) < ε. We have that pN(x) converges to p(x) w.p.1. Consequently
pN(x) < ε, and hence the SAA problem has a feasible solution, w.p.1 for N
large enough. Since pN(·) is lower semicontinuous, the feasible set of the SAA
problem is compact, and hence SN is nonempty w.p.1 for N large enough. Of
course, if x is a feasible solution of an SAA problem, then f(x) ≥ ϑN . Since
we can take such point x arbitrary close to x and f(·) is continuous, we obtain
thatlim sup
N→∞
ϑN ≤ f(x) = ϑ∗ w.p.1. (3-7)
Now let xN ∈ SN , i.e., xN ∈ X, pN(xN ) ≤ ε and ϑN = f(xN). Since the
set X is compact, we can assume by passing to a subsequence if necessary that
xN converges to a point x ∈ X w.p.1. Also we have that pNe→ p w.p.1, and
hence
lim infN→∞
pN(xN ) ≥ p(x) w.p.1.
It follows that p(x) ≤ ε and hence x is a feasible point of the true problem,
and thus f(x) ≥ ϑ∗. Also f(xN ) → f(x) w.p.1, and hence
lim infN→∞
ϑN ≥ ϑ∗ w.p.1. (3-8)
It follows from (3-7) and (3-8) that ϑN → ϑ∗ w.p.1. It also follows that the
point x is an optimal solution of the true problem and consequently we obtain
that D(SN , S) → 0 w.p.1.
Condition (A) is essential for the consistency of ϑN and SN . Think, for
example, about a situation where the constraint p(x) ≤ ε defines just one
feasible point x such that p(x) = ε. Then arbitrary small changes in the
constraint pN(x) ≤ ε may result in that the feasible set of the corresponding
SAA problem becomes empty. Note also that condition (A) was not used in
the proof of inequality (3-8). Verification of condition (A) can be done by ad
hoc methods.
Suppose now that γ > ε. Then by Proposition 6 we may expect that with
increase of the sample size N , an optimal solution of the SAA problem will
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

approach an optimal solution of the true problem with the significance level
γ rather than ε. Of course, increasing the significance level leads to enlarging
the feasible set of the true problem, which in turn may result in decreasing
of the optimal value of the true problem. For a point x ∈ X we have that
pN(x) ≤ γ, i.e., x is a feasible point of the SAA problem, iff no more than γN
times the event “G(x, ξj) > 0” happens in N trials. Since probability of the
event “G(x, ξj) > 0” is p(x), it follows that
Prob{
pN(x) ≤ γ}
= B(
⌊γN⌋; p(x), N)
. (3-9)
Recall that by Chernoff inequality [CHE], for k > Np,
B(k; p,N) ≥ 1 − exp{
−N(k/N − p)2/(2p)}
.
It follows that if p(x) ≤ ε and γ > ε, then 1 − Prob{
pN (x) ≤ γ}
approaches
zero at a rate of exp(−κN), where κ := (γ − ε)2/(2ε). Of course, if x is an
optimal solution of the true problem and x is a feasible point of the SAA
problem, then ϑN ≤ ϑ∗. That is, if γ > ε, then the probability of the event
“ϑN ≤ ϑ∗” approaches one exponentially fast. By similar analysis we have
that if p(x) = ε and γ < ε, then probability that x is a feasible point of the
corresponding SAA problem approaches zero exponentially fast (cf., [LA]).
The above is a qualitative analysis. For a given candidate point x ∈ X,
say obtained as a solution of a SAA problem, we would like to validate its
quality as a solution of the true problem. This involves two questions, namely
whether x is a feasible point of the true problem, and if so, then what is the
optimality gap f(x)−ϑ∗. Of course, if x is a feasible point of the true problem,
then f(x) − ϑ∗ is nonnegative and is zero iff x is an optimal solution of the
true problem.
Let us start with verification of feasibility of x. For that we need to
estimate the probability p(x). We proceed by employing again the Monte Carlo
sampling techniques. Generate an iid sample ξ1, ..., ξN and estimate p(x) by
pN(x). Note that this random sample should be generated independently of
a random procedure which produced the candidate solution x, and that we
can use a very large sample since we do not need to solve any optimization
problem here. The estimator pN(x) of p(x) is unbiased and for large N and
not “too small” p(x) its distribution can be approximated reasonably well by
the normal distribution with mean p(x) and variance p(x)(1 − p(x))/N . This
leads to the following approximate (1 − β)-confidence upper bound on p(x):
Uβ,N(x) := pN(x) + zβ
√
pN(x)(1 − pN(x))/N. (3-10)
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

A more accurate (1 − β)-confidence upper bound is given by (cf., [NS]):
U∗
β,N(x) := supρ∈[0,1]
{ρ : B(k; ρ,N) ≥ β} , (3-11)
where k := NpN (x) =∑N
j=1 1l(0,∞) (G(x, ξj)).
In order to get a lower bound for the optimal value ϑ∗ we proceed as
follows. Let us choose two positive integers M and N , and let
θN := B(
⌊γN⌋; ε,N)
and L be the largest integer such that
B(L− 1; θN ,M) ≤ β. (3-12)
Next generate M independent samples ξ1,m, . . . , ξN,m, m = 1, . . . ,M , each of
size N , of random vector ξ. For each sample solve the associated optimization
problemMinx∈X
f(x)
s.t.∑N
j=1 1l(0,∞) (G(x, ξj,m)) ≤ γN,(3-13)
and hence calculate its optimal value ϑmN ,m = 1, . . . ,M . That is, solve M times
the corresponding SAA problem at the significance level γ. It may happen
that problem (3-13) is either infeasible or unbounded from below, in which
case we assign its optimal value as +∞ or −∞, respectively. We can view
ϑmN , m = 1, . . . ,M , as an iid sample of the random variable ϑN , where ϑN
is the optimal value of the respective SAA problem at significance level γ.
Next we rearrange the calculated optimal values in the nondecreasing order as
follows ϑ(1)N ≤ · · · ≤ ϑ
(M)N , i.e., ϑ
(1)N is the smallest, ϑ
(2)N is the second smallest
etc, among the values ϑmN , m = 1, . . . ,M . We use the random quantity ϑ
(L)N
as a lower bound of the true optimal value ϑ∗. It is possible to show that
with probability at least 1 − β, the random quantity ϑ(L)N is below the true
optimal value ϑ∗, i.e., ϑ(L)N is indeed a lower bound of the true optimal value
with confidence at least 1− β (see2 [NS]). We will discuss later how to choose
the constants M,N and γ based on numerical experiments.
2In [NS] this lower bound was derived for γ = 0. It is straightforward to extend thederivations to the case of γ > 0.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

4
Two applications of SAA
In this Chapter we apply SAA to a portfolio problem and to a blending
problem. In the first the decision maker must choose the composition of a
portfolio of assets such that the expected return is maximized. Due to the
chance constraint, the total gain has to be greater than a pre-specified return
level v with high probability. When returns follow a multivariate normal
distribution, we compute the solution explicitly and compare it with the
results of SAA. When returns are lognormally distributed, we have to rely
on approximations.
The second problem is a joint version of a two dimensional blending
problem. We show that SAA can be readily applied to this situation at no
extra cost. Due to the independence assumption, we compute explicit answers
for this problem and use them as benchmarks to tune the parameters of SAA.
4.1
Portfolio problem
Consider the following maximization problem subject to a single chance
constraint:Maxx∈X
E[
rT x]
s.t. Prob{
rT x ≥ v}
≥ 1 − ε.(4-1)
Here x ∈ Rn is vector of decision variables, r ∈ R
n is a random vector
with known probability distribution, v ∈ R, ε ∈ (0, 1), e is a vector whose
components are all equal to 1 and
X := {x ∈ Rn : eT x = 1, x ≥ 0}.
Note that, of course, E[
rT x]
= µT x, where µ := E[r] is the corresponding
mean vector. That is, the objective function of problem (4-1) is linear and
deterministic.
The motivation to study (4-1) is the portfolio selection problem going
back to Markowitz [MAR]. The vector x represents the percentage of a total
wealth of one dollar invested in each of n available assets, r is the vector of
random returns of these assets and the decision agent wants to maximize the
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

mean return subject to having a return greater or equal to a desired level v,
with probability at least 1 − ε. In terms of risk measures, this requirement is
equivalent to a Value-at-Risk constraint. We note that problem (4-1) is not
realistic because it does not incorporate crucial features of real markets such
as cost of transactions, short sales, lower and upper bounds on the holdings,
etc. However, it will serve to our purposes as an example of an application
of the SAA method. For a more realistic model we can refer the reader, e.g.,
to [WCZ], where the authors include market frictions and discuss the best
distribution function for asset returns.
A very similar version of problem (4-1) was analyzed in [ZTSK], where the
authors obtained important information about the different policies available
in soil management as well as the trade off between net returns and soil loss.
We consider two different situations, namely when the vector of random
returns r follows multivariate normal and multivariate lognormal distributions.
The two cases are very distinct; on the former one can solve explicitly the
chance constraint, while in the latter no explicit formula is known. Under
normality, we can compare the quality of the approximations with the true
optimal value, while in the lognormal case we have to rely on approximations.
4.1.1
SAA of the portfolio problem
First assume that r follows a multivariate normal distribution with
mean vector µ and covariance matrix Σ, written r ∼ N (µ, Σ). In that case
rTx ∼ N(
µT x, xT Σ x)
, and hence (as it is well known) the chance constraint
in (4-1) can be written as a convex second order conic constraint (SOCC) as
follows.
Prob{
rTx ≥ v}
≥ 1 − ε ⇔
Prob
{
rT x − µT x√xT Σx
≥ v − µTx√xT Σx
}
≥ 1 − ε ⇔
1 − Prob
{
rT x − µT x√xT Σx
≤ v − µTx√xT Σx
}
≥ 1 − ε ⇔
1 − Φ
(
v − µT x√xT Σx
)
≥ 1 − ε ⇔
v − µT x√xT Σx
≤ z1−ε ⇔
v − µTx + z1−ε
√xT Σx ≤ 0. (4-2)
Using the explicit form (4-2) of the chance constraint, one can efficiently solve
the convex problem (4-1) for different values of ε. An efficient frontier of
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

portfolios can be constructed in an objective function value versus confidence
level plot, that is, for every confidence level ε we associate the optimal value
of problem (4-1). The efficient frontier dates back to Markowitz [MAR]. A
discussion of the subject can be found, e.g., in [CM].
If r follows a multivariate lognormal distribution, then no closed form
solution for the chance constrained problem (4-1) is available. The related
SAA problem (4-1) can be written as
Maxx∈X
µT x
s.t. pN(x) ≤ γ,(4-3)
where pN(x) := N−1∑N
i=1 1l(0,∞)(v − rTi x) and γ ∈ [0, 1). The reason we use γ
instead of ε is to suggest that for a fixed ε, a different choice of the parameter
γ in (4-3) might be suitable. For instance, if γ = 0, then the SAA problem
(4-3) becomes the linear program
Maxx∈X
µT x
s.t. rTi x ≥ v, i = 1, . . . , N .
(4-4)
A recent paper by Campi and Garatti [CG], building on the work of Calafiore
and Campi [CC], provides an expression for the probability of an optimal
solution xN of the SAA problem (3-3), with γ = 0, to be infeasible for the true
problem (3-2). That is, under the assumptions that the set X and functions
f(·) and G(·, ξ), ξ ∈ Ξ, are convex and that w.p.1 the SAA problem attains
unique optimal solution, we have that for N ≥ n,
Prob {p(xN) > ε} ≤ B(n − 1; ε, N), (4-5)
and the above bound is tight. We apply this bound to the considered portfolio
selection problem to conclude that for a confidence parameter β ∈ (0, 1) and
a sample size N∗ such that
B(n − 1; ε, N∗) ≤ β, (4-6)
the optimal solution of problem (4-4) is feasible for the corresponding true
problem (4-1) with probability at least 1 − β.
For γ > 0, problem (4-3) can be written as the mixed-integer linear
programMax
x,zµTx
s.t. rTi x + vzi ≥ v,
∑N
i=1 zi ≤ Nγ,
x ∈ X, z ∈ {0, 1}N ,
(4-7)
The equivalence of problems (4-3) and (4-7) was already proved when we
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

showed the equivalence of problems (2-8) and (2-9) in Chapter 2, Section 2.3.
Given a fixed ε in (4-1), it is not clear what are the best choices of γ and
N for approximation (4-7). We believe it is problem dependent and numerical
investigations will be performed with different values for both parameters. We
know from Proposition 6 that, for γ = ε the larger the N the closer we are to
the original problem (4-1). However, the number of samples N must be chosen
carefully because problem (4-7) is a binary problem. Even moderate values of
N can generate instances that are very hard to solve.
4.1.2
Obtaining candidate solutions
First we perform numerical experiments applying SAA to the portfolio
problem (4-1) assuming that r ∼ N (µ, Σ). We considered 10 assets (n = 10)
and the data for the estimation of the parameters was taken from historical
monthly returns adjusted for dividends from 1997 to 2007 of 10 US major
companies1. The sample was generated by the Triangular Factorization Method
[BS]. We wrote the codes in GAMS and solved the linear and binary problems
using CPLEX 9.0. The computer was a PC with an Intel Core 2 processor and
2GB of RAM.
Let us fix ε = 0.10 and β = 0.01. For these values, the sample size
suggested by (4-6) is N∗ = 183. We ran 10 independent replications of (4-4)
for each of the sample sizes N = 30, 40, . . . , 200 and for N∗ = 183. We also
build an efficient frontier plot of optimal portfolios with an objective value
versus Prob{rT xε ≥ v} axes, where xε is the optimal solution of problem (4-
1) for a given ε. We show in the same plot (Figure 4.1) the corresponding
objective function values and Prob{rT xN ≥ v} for each optimal solution xN
found for the problem (4-4). To identify each point with a sample size, we
used a gray scale that attributes light tones of gray to smaller sample sizes
and darker ones to larger samples. The efficient frontier curve is calculated for
ε = 0.8, 0.81, . . . , 0.99 and then connected by lines. The vertical and horizontal
lines are for reference only: they represent the optimal value for problem (4-1)
with ε = 0.10 and the 90% reliability level, respectively.
Figure 4.1 shows interesting features of the SAA problem (4-4). Although
larger sample sizes always generate feasible points, the value of the objective
function, in general, is quite small if compared with the optimal value 1.004311
of problem (4-1) with ε = 0.10. We also observe the absence of a convergence
property: if we increase the sample size, the feasible region of problem (4-4)
1JP Morgan, Oracle, Intel, Exxon, Wal-Mart, Apple, Sun Microsystems, Microsoft, Yahooand Procter & Gamble
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA
0.80
0.85
0.90
0.95
1.00
0.998 1.004 1.010
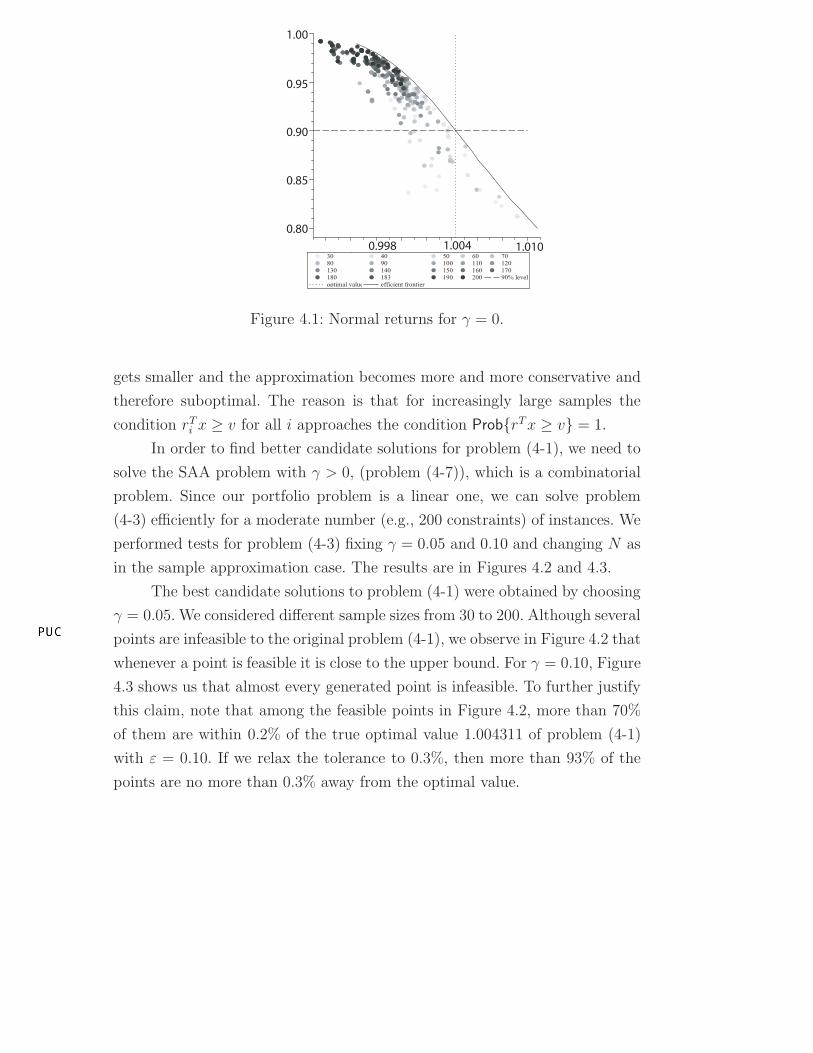
Figure 4.1: Normal returns for γ = 0.
gets smaller and the approximation becomes more and more conservative and
therefore suboptimal. The reason is that for increasingly large samples the
condition rTi x ≥ v for all i approaches the condition Prob{rT x ≥ v} = 1.
In order to find better candidate solutions for problem (4-1), we need to
solve the SAA problem with γ > 0, (problem (4-7)), which is a combinatorial
problem. Since our portfolio problem is a linear one, we can solve problem
(4-3) efficiently for a moderate number (e.g., 200 constraints) of instances. We
performed tests for problem (4-3) fixing γ = 0.05 and 0.10 and changing N as
in the sample approximation case. The results are in Figures 4.2 and 4.3.
The best candidate solutions to problem (4-1) were obtained by choosing
γ = 0.05. We considered different sample sizes from 30 to 200. Although several
points are infeasible to the original problem (4-1), we observe in Figure 4.2 that
whenever a point is feasible it is close to the upper bound. For γ = 0.10, Figure
4.3 shows us that almost every generated point is infeasible. To further justify
this claim, note that among the feasible points in Figure 4.2, more than 70%
of them are within 0.2% of the true optimal value 1.004311 of problem (4-1)
with ε = 0.10. If we relax the tolerance to 0.3%, then more than 93% of the
points are no more than 0.3% away from the optimal value.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

0.80
0.85
0.90
0.95
1.00
1.000 1.005 1.0100.995
Figure 4.2: Normal with γ = 0.05.
0.80
0.85
0.90
0.95
1.00
1.000 1.0101.0050.995
Figure 4.3: Normal with γ = 0.10.
To investigate the possible choices of γ and N in problem (4-7), we
created a three dimensional representation which we call γN -plot. The domain
is a discretization of values of γ and N , forming a grid with pairs (γ, N). For
each pair we solve an instance of problem (4-7) with these parameters and
stored the optimal value and the approximate probability of being feasible to
the original problem (4-1). The z-axis represents the optimal value associated
to each point in the domain in the grid. Finally, we created a surface of triangles
based on this grid as follows. Let i be the index for the values of γ and j for the
values of N . If candidate points associated with grid members (i, j), (i + 1, j)
and (i, j + 1) or (i + 1, j + 1), (i + 1, j) and (i, j + 1) are feasible to problem
(4-1) (with probability greater than or equal to (1− ε)), then we draw a dark
gray triangle connecting the three points in the space. Otherwise, we draw a
light gray triangle.
We created a γN -plot for problem (4-1) with normal returns. The result
can be seen in Figure 4.4, where we also included the plane corresponding
to the optimal solution with ε = 0.10. The values for parameter γ were
0, 0.01, . . . , 0.10 and for N = 30, 40, . . . , 200. From Figure 4.4 we see that
for any fixed γ small sample sizes tend to generate infeasible solutions and
large samples feasible ones. As predicted by the results of Campi and Garatti,
when γ = 0, large sample sizes generate feasible solutions, although they can
be seen to be of poor quality judging by the low peaks observed in this region.
The concentration of high peaks corresponds to γ values around ε/2 = 0.05 for
almost all sample sizes, including small ones (varying from 50 until 120). We
generated different instances of Figure 4.4 and the output followed the pattern
described here.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

1.005
1.0
0.995
30 80 130 1800.0
0.025
0.05
0.075
0.1
1.01
g
N
Figure 4.4: γN -plot for the portfolio problem with normal returns.
Even though there are peaks in other regions, Figure 4.4 suggests a
strategy to obtain good candidates for chance constrained problems: choose
γ close to ε/2, solve instances of SAA problems with small sizes of N (e.g. one
third of the Campi-Garatti estimate (4-6)) and keep the best solution. This
is fortunate because SAA problems with γ > 0 are binary problems that can
be hard to solve. Our experience with the portfolio problem and with others
suggest this strategy works better than trying to solve SAA problems with
large sample sizes. The choice γ = ε/2 came from our empirical experience.
We believe in general the choice of γ is problem dependent.
4.1.3
Upper bounds
A method to compute lower bounds of chance constrained problems of
the form (3-1) was suggested in [NS]. We summarized their procedure at the
end of Section 3.1, leaving the question of how to choose the constants L, M
and N . Given β, M and N , it is straightforward to specify L: it is the largest
integer that satisfies (3-12). For a given N , the larger M the better because we
are approximating the L-th order statistic of the random variable ϑN . However,
note that M represents the number of problems to be solved and this value is
often constrained by computational limitations.
In [NS] an indication of how N should be chosen is not given. It is possible
to gain some insight on the magnitude of N by doing some algebra in inequality
(3-12). With γ = 0, the first term (i = 0) of the sum (3-12) is
[
1 − (1 − ε)N]M ≈
[
1 − e−Nε]M
. (4-8)
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Approximation (4-8) suggests that for small values of ε we should take N of
order O(ε−1). If N is much bigger than 1/ε then we would have to choose a very
large M in order to honor inequality (3-12). For instance if ε = 0.10, β = 0.01
and N = 100 instead of N = 1/ε = 10 or N = 2/ε = 20, we need M to be
greater than 100 000 in order to satisfy (3-12), which can be computationally
intractable for some problems. If N = 200 then M has to be grater then 109,
which is impractical for most applications.
In [LA], the authors applied the same technique to generate bounds on
probabilistic versions of the set cover problem and the transportation problem.
To construct the bounds they varied N and used M = 10 and L = 1. For many
instances they obtained lower bounds slightly smaller (less than 2%) or even
equal to the best optimal values generated by SAA. In the portfolio problem,
the choice L = 1 generated poor bounds as we will see.
We performed experiments for the portfolio problem with returns now
following a lognormal distribution. Figure 4.5 shows the sample points obtained
by SAA with γ = 0 and with the corresponding probability estimated by
Monte-Carlo. The reader is referred to [LK] for detailed instructions of how
to generate samples from a multivariate lognormal distribution. Since in the
lognormal case one cannot compute the efficient frontier, we also included in
Figure 4.5 upper bounds2 for ε = 0.02, . . . , 0.20, calculated according to (3-
12). We fixed β = 0.01 for all cases and chose three different values for the
constants L, M and N .
First we fixed L = 1 and N = ⌈1/ε⌉ (solid line in Figure 4.5, upper bound
A). The constant M was chosen to satisfy the inequality (3-12). The results
were not satisfactory, mainly because M ended up being too small. Since the
constant M defines the number of samples from vN and since our problem is
a linear one, we decided to fix M = 1 000. Then we chose N = ⌈1/ε⌉ (dashed
line in Figure 4.5, upper bound B) and defined L to be the largest integer such
that (3-12) is satisfied. Finally, we generated an upper bound with M = 1 000
and N = ⌈2/ε⌉ (dotted line in Figure 4.5, upper bound C).
It is harder to construct upper bounds with γ > 0. The difficulty lies
in solving integer problems and it is hard to find an appropriate choice of
the parameters M or N in order to keep the problem size manageable. Based
on experiments, a good choice for this problem is M = 500, N = 50 and
γ = ε/2 = 0.05, which originated the dotted upper bound in Figure 4.5.
Although it is slightly better than the bounds obtained with γ = 0, in many
situations one often wants an upper bound without much computational effort.
If that is the case, it might be appropriate to use equation (3-12) for γ = 0
2The portfolio problem (4-1) is a maximization problem.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

0.80
0.85
0.90
0.95
1.00
1.021.011.00
Figure 4.5: Lognormal with γ = 0.
since the corresponding problems are easier to solve.
0.80
0.85
0.90
0.95
1.00
1.010 1.0301.020
Figure 4.6: Lognormal with γ =
0.05.
0.80
0.85
0.90
0.95
1.00
1.010 1.020 1.030
Figure 4.7: Lognormal with γ =
0.10.
Following the normal case, we performed similar experiments with γ =
ε/2 and γ = ε. The results are in Figures 4.6 and 4.7 respectively, where we
only included the dashed upper bound. The experiments for the lognormal
case confirmed the tendency observed in the normal case: γ = ε generated
infeasible points, γ = 0 generated feasible points of poor quality if measured
by the distance to the upper bound curves and γ = ε/2 yielded the best
candidate solutions.
4.2
A blending problem
Let us consider a second example of a chance constrained problem.
Suppose a farmer has some crop and wants to use fertilizers to increase the
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

production. He hires an agronomy engineer who recommends 7 g of nutrient
A and 4 g of nutrient B. He has two kinds of fertilizers available: the first has
ω1 g of nutrient A and ω2 g of nutrient B per kilogram. The second has 1 g of
each nutrient per kilogram. The quantities ω1 and ω2 are uncertain: we assume
they are (independent) continuous uniform random variables with support in
the intervals [1, 4] and [1/3, 1] respectively. Furthermore, each fertilizer has a
unitary cost per kilogram.
There are several ways to model this blending problem. A detailed
discussion can be found in [HV], where the authors use this problem to motivate
the field of stochastic programming. We consider a joint chance constrained
formulation as follows:
Minx1,x2
x1 + x2
s.t. Prob{ω1x1 + x2 ≥ 7, ω2x1 + x2 ≥ 4} ≥ 1 − ε,
x1, x2 ≥ 0,
(4-9)
where xi represents the quantity of fertilizer i purchased, i = 1, 2, and ε ∈ [0, 1]
is the reliability level. The independence assumption allows us to convert the
joint probability in (4-9) into a product of probabilities. After some tedious
calculations, one can explicitly solve (4-9) for all values of ε. For ε ∈ [1/2, 1]
the solution (x∗
1, x∗
2) and the optimal value v∗ = x∗
1 + x∗
2 are
x∗
1 =18
9 + 8(1 − ε), x∗
2 =2(9 + 28(1 − ε))
9 + 8(1 − ε), v∗ =
4(9 + 14(1 − ε))
9 + 8(1 − ε).
For ε ∈ [0, 1/2], v∗ is
v∗ =2(25 − 18(1 − ε))
11 − 9(1 − ε). (4-10)
Our goal is to exemplify the use of SAA to joint chance constrained
problems. In addition, we use problem (4-9) as a benchmark to gain more
understanding of tuning of the underlying parameters of the SAA approach
since an explicit solution is available in this case. As mentioned in Section
2.3 of Chapter 2, we can convert a joint chance constrained problem into a
problem of the form (3-1) using the min (or max) operators. Problem (4-9)
becomes
Minx1,x2
x1 + x2
s.t. Prob {min{ω1x1 + x2 − 7, ω2x1 + x2 − 4} ≥ 0} ≥ 1 − ε,
x1, x2 ≥ 0.
(4-11)
Introducing one auxiliary variable zi per scenario, it is possible to formulate the
SAA method to problem (4-11) as a mixed integer linear program as follows.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

0.90
0.95
1.00
6.05.5 7.06.5 7.5
Figure 4.8: SAA for the blending problem with γ = 0.025.
Minx1,x2
x1 + x2
s.t. ωi1x1 + x2 − 7 + Kzi ≥ 0, i = 1, . . . , N,
ωi2x1 + x2 − 4 + Kzi ≥ 0, i = 1, . . . , N,
∑N
i=1 zi ≤ Nγ,
z ∈ {0, 1}N ,
x1, x2 ≥ 0,
(4-12)
where N is the number of samples, ωi1 and ωi
2 are samples from the random
variables ω1 and ω2, γ ∈ (0, 1) and K is a positive constant greater or equal
than 7.
4.2.1
Numerical experiments
We performed experiments similar to the ones for the portfolio problem
so we present the results without details. In Figure 4.8 we generated appro-
ximations for problem (4-9) with ε = 0.05 using SAA. The sample points
were obtained by solving a SAA problem with γ = 0.025 and sample sizes
N = 60, 70, . . . , 150. The Campi-Garatti inequality (4-6) suggested value is
N∗ = 130. In addition, we included the efficient frontier for problem (4-9). We
will not show the corresponding Figures for other values of γ, but the pattern
observed in the portfolio problem repeated: with γ = 0 almost every point
was feasible but far from the optimal, with γ = ε = 0.05 almost every point
was infeasible. Again, the parameter choice that generated the best candidate
solutions was γ = ε/2 = 0.025.
We also show the γN -plot for SAA applied to problem (4-9). We tested γ
values in the range 0, 0.005, 0.01, . . . , 0.05 and N = 60, 70, . . . , 150. We included
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

6.95
5.45
6.45
5.95
0.025
0.05
0.075
0.1
120
100
60
140
80
N
g
Figure 4.9: γN -plot for the blending problem.
a plane representing the optimal value of problem (4-9) for ε = 0.05, which is
readily obtained by applying formula (4-10).
In accordance with Figure 4.4, we note that in Figure 4.9 the best
candidate solutions are the ones with γ around 0.025. Even for very small
sample sizes we have feasible solutions (dark gray triangles) relatively close to
the optimal plane. On the other hand, this experiment gives more evidence that
SAA with γ = 0 is excellent to generate feasible solutions (dark gray triangles)
but the quality of the solutions is poor. As shown in Figure 4.9, the high peaks
associated with γ = 0 persist for any sample size, generating points far form
the optimal plane. In agreement with Figure 4.4, the candidates obtained for
γ close to ε were mostly infeasible.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

5
From separated to joint variables: the hurdle-race problem
We consider a general provisioning problem, where an economic agent
aims to determine an initial amount that would be needed in order to meet
a series of future payment obligations with a sufficiently large probability. We
assume a “hold-to-maturity” (actuarial) approach: the initial provision is such
that upon investing it in a portfolio one is always able in the future to pay-
off the cash flows. In contrast, the “available-for-sales” (financial) framework
admits the possible fall in the arbitrage-free price of the series of cash flows
over a given time period and use it as means of assessing risk and establishing
buffers. Although the latter approach is at the core of the latest regulatory
documents such as Basel II and Solvency II, it can induce crashes when they
would not otherwise occur. Furthermore, we believe better risk measures are
available, such as the so-called coherent risk measures [ADEH]. This does not
mean that the financial approach is wrong but the actuarial framework is at
least a complementing alternative. For a detailed criticism of those regulatory
documents we refer the reader to [DEGK].
In [VDGK], the authors study the provisioning problem and impose
minimum requirements of available capital at each period, called hurdles. In
their framework, hurdles are modeled as separated chance constraints with
given reliability levels, one for each period of time. They coined the term hurdle-
race problem to describe the provisioning problem with hurdles. We start by
summarizing the approach proposed in [VDGK] and stating their main result.
Then we propose an alternative chance constrained model which requires that
all the obligations should be met jointly with a given reliability level. To this
end we make use of a joint chance constraint and refer to the problem as
the joint hurdle-race problem. We propose to solve the corresponding problem
using SAA and to compare the results with [VDGK]. In addition, we consider
another generalization in which the hurdles are not determined by the model
builder but are defined as discounted values of future obligations by stochastic
risk-free rates.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

5.1
The hurdle-race problem and comonotonicity
An insurer wants to determine the initial provision R0 required to meet
n future obligations, of costs α1, . . . , αn at fixed, prescribed times t1, . . . , tn, for
t ∈ [0, tn]. Among obligations, the insurer may invest his capital, with random
returns. More precisely, the stochastic return process (Y1, . . . , Yn) such that 1
unit at time 0 grows to exp(Y1 + · · ·+ Yj) at time tj determines the evolution
of capital Rj in time,
Rj = Rj−1 exp(Yj) − αj , j = 1, . . . , n. (5-1)
In [VDGK], the authors impose probabilistic constraints (the hurdles) that
have to be met every time tj, that is, provision Rj has to be larger than a
deterministic value Vj with high probability 1−εj. They formulate the hurdle-
race problem as follows:
R0 = MinR0≥V0
R0 (5-2)
Prob{Rj ≥ Vj |R0} ≥ 1 − εj , j = 1, . . . , n
for given hurdles V0, V1, . . . , Vn and given tolerances ε1, ε2, . . . , εn ∈ [0, 1].
To determine the optimal provision R0 in (5-2) set
S[0,j] =
j−1∑
i=1
αi exp(−Y1 − · · · − Yi) + (Vj + αj) exp(−Y1 − · · · − Yj), (5-3)
the stochastically discounted value of the future obligations in the restricted
time period [0, j]. Theorem 1 in [VDGK], below, gives the optimal solution of
problem (5-2) in terms of the quantiles of the distributions of S[0,j].
Theorem 7 The optimal initial provision R0 defined in (5-2) is given by
R0 = Max{V0, F−1S[0,1]
(1 − ε1), F−1S[0,2]
(1 − ε2), . . . , F−1S[0,n]
(1 − εn)},
where FS[0,j]is the cumulative distribution function of S[0,j], j = 1, . . . , n.
A basic ingredient in the proof is the simple fact that
Prob {Rj ≥ Vj | R0} = Prob{
S[0,j] ≤ R0
}
, j = 1, . . . , n.
Thus, in order to determine the optimal R0 we are led to compute the quan-
tiles of the random variables S[0,j], which is very hard in most relevant cases.
For instance, if the random return process (Y1, . . . , Yn) follows a multivariate
normal distribution, we have that S[0,j] is a sum of lognormal distributions, a
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

random variable with no known distribution. The approach in [VDGK] repla-
ces the random variables S[0,j] by simpler random variables using comonotonic
approximations, whose quantiles can be calculated explicitly. Such approxima-
tions assume the random vector is strongly correlated, with all the components
depending on the same univariate random variable. A detailed description of
the theory of comonotonicity can be found in [DDGa]. For examples and ap-
plications we refer the reader to [DDGb].
In [VDGK], numerical experiments are performed for the case in which
the random variables (5-3) are sums of lognormals, and hence the return
process (Y1, . . . , Yn) follows a multivariate normal distribution. They compare
their results with the values obtained from the empirical distribution of S[0,j].
In the next section, in the more general joint hurdle-race problem, we apply
SAA to obtain good candidate solutions. We compare the results for the joint
hurdle-race to the ones obtained in [VDGK]. From now on we refer to this
model (5-2) as the separated hurdle-race problem.
5.2
The joint hurdle-race problem
The definition of R0 in (5-2) does not reflect the proper safety requi-
rements: for each fixed time tj the probability of not satisfying a hurdle is
small, but the probability of having missed one of the hurdles may remain
high. Indeed, there is no guarantee that the optimal provision keeps the joint
probability of missing at least one hurdle low. In [HEN], the author exempli-
fies the contrast between both models in a cash matching problem somewhat
similar to the separated hurdle race problem (5-2).
We then consider the joint hurdle-race problem,
R0 = MinR0≥V0
R0 (5-4)
Prob{Rj ≥ Vj, j = 1, . . . , n |R0} ≥ 1 − ε (5-5)
for ε ∈ [0, 1]. As opposed to problem (5-2), the optimal provision R0 in problem
(5-4) is the smallest value such that with high probability no hurdle is violated.
Although we have a single constraint in (5-4) opposed to n constraints
in (5-2), problem (5-4) is harder to solve: the joint probability calculation in
(5-4) involves the computation of a quantile of the cumulative distribution
of the random vector (S[0,1], S[0,2], . . . , S[0,n]), an extremely difficult task. Even
checking feasibility for a given candidate R0 is usually hard.
We use SAA to obtain good candidate solutions of (5-4) and lower bounds
for the optimal value. Indeed, (5-4) is a joint chance constrained problem so
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

the techniques of the previous Chapters apply.
The joint hurdle-race problem is not explicitly written in format (1-1),
but it can be easily converted by employing the max-function
Prob {R1 ≥ V1, . . . , Rn ≥ Vn|R0} = Prob{
S[0,1] ≤ R0, . . . , S[0,n] ≤ R0
}
= Prob
{
maxj=1,...,n
{S[0,j]} ≤ R0
}
= Prob
{
maxj=1,...,n
{S[0,j]} − R0 ≤ 0
}
. (5-6)
Using (5-6) we have that problem (5-4) is a particular case of (1-1):
MinR0≥V0
R0
s.t. Prob
{
maxj=1,...,n
{S[0,j]} − R0 ≤ 0
}
≥ 1 − ε.(5-7)
But how do we solve (5-7) with SAA? Given a sample size N and a reliability
level γ, the SAA formulation becomes a MILP as follows.
MinR0≥V0
R0
s.t. (V1 + α1) exp(−Y s1 ) − R0 − Kzs ≤ 0, s = 1, . . . , N,
...∑j
i=1 αi(j) exp(−Y s1 − · · · − Y s
i ) − R0 − Kzs ≤ 0, s = 1, . . . , N,...
∑n
i=1 αi(n) exp(−Y s1 − · · · − Y s
n ) − R0 − Kzs ≤ 0, s = 1, . . . , N,∑N
s=1 zs ≤ Nγ,
zs ∈ {0, 1}N ,
(5-8)where K is a sufficiently large positive constant, Y s
i are samples from the return
process (Y1, . . . , Yn) and
αi(j) =
{
αi, i 6= j,
Vj + αj , i = j.
The feasibility check cannot be performed exactly and uses Monte-Carlo
methods.
5.2.1
Numerical experiments
We compare separated and the joint hurdle-race problems. Following
[VDGK], we performed experiments with n = 40 periods of investment and
with normal iid returns Yi with mean µ = log 1.10 and standard deviation
σ = 0.10. The hurdles and the liabilities are equal to 10 and 0.8 respectively for
all time periods. For the separated hurdles we choose εj = 0.05 for all periods
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

and for the joint case we take ε = 0.05. Our numerical experiments showed that
the stochastic lower bound approximation in [VDGK] is extremely accurate
for the separated hurdle-race problem, and we obtained R0 = 13.56411337.
An (stochastic) upper bound, obtained by the comonotonic approximation, is
14.48125099.
For the joint hurdle-race problem, we first choose values of γ and N .
Following the empirical findings for the portfolio problem and the blending
problem of the previous Chapter, we set γ = ε/2 = 0.025. We then compute
the value of N for which the optimal solution of the SAA problem is feasible
for the original problem with probability greater than 99% (see [CG]), which
in this case is N = 90. This estimate is usually too conservative and should
be regarded as an upper bound for the actual value of N to be used in the
experiments. The best result was obtained for N = 50 and the smallest initial
provision was R0 = 15.81238194. A Monte-Carlo experiment with 100 000
samples estimated the true probability of this candidate as 0.9527 and it is
thus feasible for the original problem.
We compute statistical lower bounds for the optimal value of the joint
hurdle-race problem following section 4.1.3. Fixing M = 1 000 and L according
to (3-12), the 99%-confidence lower bound for the optimal value is 15.302594.
Obviously, the candidate solution obtained by SAA can be regarded as an
upper bound for the true optimal value (if feasible).
Similar experiments were performed with εj = 0.01. The techniques in
[VDGK] give 16.34858684 for the solution of the separated problem, with
comonotonic upper bound1 equal to 18.37208466. It is not clear how these
methods should be extended to the joint hurdle problem. In this case, applying
SAA with N = 150 and γ = ε/2 = 0.005, the new method obtained
18.21640345. The true probability was estimated by Monte-Carlo and was
equal to exactly 1, with 100 000 samples. The 99%-confident lower bound
obtained was 17.515987.
It is interesting to compare the solution for the joint case (5-4) with the
one for the separate case (5-2). The best provisions obtained for the latter were
less than those for the former in both experiments. One might be tempted to
adopt the separated version as the best model since smaller provisions are
usually preferred. However, the solution of the joint problem is obviously more
robust. We proceed to substantiate this claim with some simulations.
The separated case was treated as in [VDGK], whereas we used SAA
for the joint problem. For illustration, we first present small size simulation
1The comonotonic upper bound is constructed using conditional expectations of como-
notonic random variables.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

experiments that show the differences between the two approaches. Figures
5.1 and 5.2 show the estimated probability of violating each hurdle for the
separated problem. The values in the y-axis are close to 0.05 and 0.01
respectively, in accordance with the chosen reliability levels. Figures 5.3 and
5.4 show 100 sample paths for each choice of ε in the separated case. In Figure
5.3, 12 paths violated one of the hurdles at least once, giving a violation
probability of 0.12, significantly higher than the original 0.05 confidence level.
In Figure 5.4, the probability of violation was 0.06, also higher than the original
significance level 0.01. In the joint case, Figures 5.5 and 5.6 indicate that at
least one constraint was violated only 3% and 1% of the time, in accordance
with the joint reliability levels ε = 0.05 and ε = 0.01, a much more robust
situation.
In order improve numerical accuracy, we ran the same experiments for
10 000 paths. For εj = ε = 0.05, the estimated probability of violation of
at least one hurdle for the separated hurdle-race problem was 0.1173, much
higher than the corresponding value 0.0328 for the joint version with the same
reliability level. For εj = ε = 0.01, the estimated values were 0.0247 for the
separated formulation and 0.0094 for the joint counterpart. In both cases the
separated hurdle-race problem misses the joint reliability level by roughly twice
the pre-determined reliability level, substantially underestimating the more
robust provision given by SAA for the joint case.
0 5 10 15 20 25 30 35 40 450
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Figure 5.1: ε = 0.05.
0 5 10 15 20 25 30 35 40 450
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Figure 5.2: ε = 0.01.
5.3
Stochastic hurdles
We now consider a joint hurdle-race model with the possibility of mo-
deling stochastic hurdles. Now we define the hurdles as the market consistent
value of future liabilities when evaluating the portfolio at period j, i.e., the
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

0 5 10 15 20 25 30 35 40 45−200
0
200
400
600
800
1000
1200
Figure 5.3: Sample paths for ε =0.05, SHR.
0 5 10 15 20 25 30 35 40 45
0
500
1000
1500
2000
2500
3000
Figure 5.4: Sample paths for ε =0.01, SHR.
0 5 10 15 20 25 30 35 40 45
0
500
1000
1500
2000
2500
Figure 5.5: Sample paths for ε =0.05, JHR.
0 5 10 15 20 25 30 35 40 45
0
200
400
600
800
1000
1200
1400
1600
1800
Figure 5.6: Sample paths for ε =0.01, JHR.
hurdles will be the discounted cash flows at the stochastic risk-free rate. In
particular, the hurdles Vj are not known at period j.
In addition to the stochastic return process (Y1, . . . , Yn), the model will
have a risk-free rate process (r1, . . . , rn) that will determine the (stochastic)
hurdles as follows.
V0 = α1 exp(−r1) + α2 exp(−r1 − r2) + · · ·+ αn exp(−r1 − · · · − rn),
V1 = α1 + α2 exp(−r2) + · · ·+ αn exp(−r2 − · · · − rn),
... (5-9)
Vn = αn.
SAA obtains candidate solutions with no additional computational effort.
In the numerics, the risk-free rate process was composed of iid normal random
variables with mean µr = 0.04 and standard deviation σr = 0.05. The
stochastic return process is the same as described in section (5.2.1). For
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

ε = 0.05, the best solution was 21.68791898, with N = 60 and γ = ε/2 = 0.025.
The estimated probability was 0.95275, using 20 000 samples. For ε = 0.01,
the best solution was 25.17916015, with N = 120 and γ = ε/2 = 0.005. The
estimated probability was exactly 1, with 20 000 samples.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

6
Conclusion
We believe that the SAA method is a valuable tool to obtain good
candidate solutions for chance constrained problems. An important advantage
of the method is the fairly general assumption on the underlying distribution
of the random variables of the problem: SAA only requires the ability to
sample from the given distribution. The related numerical analysis is tractable
and stable, allowing for practical implementations. The thesis bridges the
gap between theory and application, by presenting theoretical foundations,
techniques for parameter calibration and a collection of applications, which
exemplify as benchmarks and as new amenable problems.
SAA was used in a portfolio chance constrained problem with random
returns. In the normal case, the efficient frontier can be computed explicitly
and we used it as a benchmark solution. Fixing the parameters ε = 0.10 and
γ = 0 in the method, we concluded that the sample size suggested by Campi-
Garatti inequality (4-6) was too conservative for our problem: a much smaller
sample gave rise to better feasible solutions. Similar results were obtained
for the lognormal case, where upper bounds were computed using a method
developed in [NS].
As another illustration of the SAA method, we modeled a two dimen-
sional blending problem as a joint chance constrained problem. Due to the
independence assumption, one can again solve the problem explicitly and find
the optimal solution for any given reliability level. This served as a benchmark
for SAA on the class of approximate joint chance constrained problems.
In both examples, the choice γ = ε/2 obtains very good candidate
solutions. Even though it generated more infeasible points if compared to the
choice γ = 0, the feasible ones were of better quality. Using the γN -plot
(Figures (4.4) and (4.9)) we were able to confirm these empirical findings for
our two test problems. Relatively small sample sizes (e.g., if compared to (4-6)
estimates) can yield good candidate solutions, which is crucial since for γ > 0
the SAA problem is an integer program. Upper bounds were constructed for
the portfolio problem with γ = 0 and continuous linear programs were solved
to obtain the estimates. According to approximation (4-8), the number of
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

samples N should be of order 1/ε. Since no closed solution is available for
the portfolio problem with lognormal returns, having an upper bound is an
important information about the variability of the solution.
Finally we described the hurdle-race problem, proposed in [VDGK]. We
proposed a more adequate formulation in which the hurdles were taken jointly.
We obtained good candidate solutions and lower bounds for the true optimal
value using SAA. An additional extension, assuming stochastic hurdles instead
of deterministic ones, is handled by SAA at almost no extra cost.
Future work will include writing a SAA solver. For this goal, the empirical
findings in this text are crucial. Together with H. Bortolossi, we started to write
a program in C++ using Osi, a uniform API for interacting with callable solver
libraries. At present, we handle SAA problems with SYMPHONY, an open-
source generic MILP developed by T.K. Ralphs. Both Osi and SYMPHONY
can be freely downloaded at www.coin-or.org. The idea is to make our solver
freely available for use with SLP-IOR1, a user-friendly interface for stochastic
programs developed by P. Kall and J. Mayer. As of yet, problems such as
the portfolio problem of Chapter 4, where the uncertainty is multiplying the
decision variables, cannot be solved by any solver available at SLP-IOR.
The first Chapters of the thesis, in a condensed form, are the content
to [PAS]. A text with S. Vanduffel about the hurdle-race problem is in prepa-
ration. We plan to extend the results described here by assuming stochastic
liabilities of the type
αi = ai + fi(Ei), i = 1, . . . , n,
where ai are constants, (E1, . . . , En) is a multivariate normal vector and fi
are given functions. Such a setting may be appropriate in the context of life
insurance activities. The ai would be the total amount of fixed guaranteed
benefits to be paid to the policy holders. The insurance company may also
provide a profit sharing mechanism linked to some return process (E1, . . . , En)
of an external benchmark (e.g a stock index).
1 www.ior.uzh.ch/Pages/English/Research/StochOpt/index en.php
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Bibliography
[AHM] AHMED, S. Convexity and decomposition of mean-risk sto-
chastic programs. Mathematical Progamming, v. 106, p. 433–446,
2006.
[AW] ARTSTEIN, Z.; WETS, R.J.-B. Consistency of minimizers and
the slln for stochastic programs. Journal of Convex Analysis,
v. 2, p. 1–17, 1996.
[ADEH] ARTZNER, P.; DELBAEN, F.; EBER, J-.M.; HEATH, D. Cohe-
rent measures of risk. Mathematical Finance, v. 9, p. 203–228,
1999.
[BS] BARR, D.R.; SLEZAK, N.L. A comparison of multivariate
normal generators. Communications of the ACM, v. 15, p. 1048–
1049, 1972.
[BEA] BEALE, E.M.L. On minimizing a convex function subject to
linear inequalities. Journal of the Royal statistical Society, Series
B, v. 17, p. 173–184, 1955.
[BN] BEN-TAL, A.; NEMIROVSKI, A. Robust optmization –
methodology and applications. Mathematical Programming, v.
93, p. 453–480, 2002.
[BP] BORTOLOSSI, H.J.; PAGNONCELLI, B. Uma
introducao a otimizacao sob incerteza. III
Bienal da SBM, Goiania, Brazil. Available at
http://www.mat.puc-rio.br/∼hjbortol/seminarios
/2006.1/soe/arquivos/iii-bienal-sbm-texto.pdf, 2006.
[CC] CALAFIORE, G.; CAMPI, M.C. The scenario approach to
robust control design. IEEE Transactions on Automatic Control,
v. 51, p. 742–753, 2006.
[CCS] CHARNES, A.; COOPER, W. W.; SYMMONDS, G.H. Cost ho-
rizons and certainty equivalents: an approach to stochastic
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

programming of heating oil. Management Science, v. 4, p. 235–
263, 1958.
[CG] CAMPI, M.C.; GARATTI, S. The exact feasibility of rando-
mized solutions of robust convex programs. Available at Op-
timization online (www.optimization-online.org), 2007.
[CHE] CHERNOFF, H. A measure of asymptotic efficiency for tests
of a hypothesis based on the sum observations. Annals of
Mathematical Statistics, v. 23, p. 493–507, 1952.
[CM] CONSTANTINIDES, G.; MALLIARIS, A.G. Portfolio theory. In
R.A. Jarrow, V. Maksimovic, and W.T. Ziemba, editors, Finance, v.
9 of Handbooks in OR & MS, North-Holland Publishing Company,
p. 1–30, 1995.
[DEGK] DANIELSSON, J. et al. An academic response to Basel II.
LSE Financial Markets Group, Special Paper Series, number 130,
2001.
[DAN] DANTZIG, G.B. Linear programming under uncertainty.
Management science, vol. 1, 197–206, 1955.
[DPR] DENTCHEVA, D.; PREKOPA, A.; RUSZCZYNSKI, A. Conca-
vity and efficient points of discrete distributions in pro-
babilistic programming. Mathematical Programming, v. 89, p.
55–77, 2000.
[DDGa] DHAENE, J. et al. The concept of comonotonicity in actu-
arial science and finance: theory. Insurance: Mathematics and
Economics, v. 31, p. 3–33, 2002.
[DDGb] DHAENE, J. et al. The concept of comonotonicity in actua-
rial science and finance: applications. Insurance: Mathematics
and Economics, v. 31, p. 133–161, 2002.
[DGKS] DUPACOVA, J.; GAIVORONSKI, A.; KOS, Z.; SZANTAI, T. Sto-
chastic programming in water management: a case study
and a comparison of solution techniques. European Journal
of Operational Research, v. 52, p. 28–44, 1991.
[HV] KLEIN HANEVELD, W.K.; VAN DER VLERK, M.H. Stochastic
Programming (lecture notes). 2007.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

[HEN] HENRION, R. Introduction to chance constrained program-
ming. Available at http://www.stoprog.org/.
[HM] HENRION, R.; MOLLER, A. Optimization of a continuous
distillation process under random inflow rate. Computers &
Mathematics with Applications, v. 45, p. 247–262, 2003.
[HLMS] HENRION, R. et al. Stochastic optimization for opera-
ting chemical processes under uncertainty. In Grtschel, M.,
Krunke, S., Rambau, J., (editors), Online optimization of large scale
systems, Springer, p. 457–478, 2001.
[HS] HIGLE, J.; SEN, S. Stochastic Decomposition: A Statistical
Method for Large Scale Stochastic Linear Programming.
Springer, Berlin, 1996.
[KM] KALL, P.; MAYER, J. Stochastic Linear Programming. Sprin-
ger, 2005.
[KW] KALL, P.; WALLACE, S. Stochastic Programming. Wiley John
& Sons, 1995. Freely available at http://www.stoprog.org/.
[KQ] KAO, E.P.C.; QUEYRANNE, M. Budgeting cost of nursing in
a hospital. Management Science, v. 31, p. 608–621, 1985.
[LSW] LINDEROTH, J.; SHAPIRO, A.; WRIGHT, S. The empirical
behavior of sampling methods for stochastic programming,
Annals of Operations Research, v. 142, p. 215–241, 2006.
[LS] LOUVEAUX, F.V.; SMEERS, Y. Optimal investments for elec-
tricity generation: a stochastic model and a test problem.
In Yu. Ermoliev and R.J.-B. Wets, editors, Numerical techniques for
stochastci optimization, chapter 24, Springer-Verlag, Berlin, 1988.
[LA] LUEDTKE, J.; AHMED, S. A sample approximation approach
for optimization with probabilistic constraints SIAM Journal of
Optimization, v. 19, p. 674–699, 2008.
[LAN] LUEDTKE, J.; AHMED, S.; NEMHAUSER, G.L. An integer
programming approach for linear programs with proba-
bilistic constraints. To appear in Mathematical Programming,
2007.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA
[LK] LAW, A.; KELTON, W.D. Simulation Modeling and Analysis.
Industrial Engineering and Management Science Series. McGraw-
Hill Science/Engineering/Math, 1999.
[MAR] MARKOWITZ, H. Portfolio selection. Journal of Finance, v. 7,
p. 77–97, 1952.
[NS] NEMIROVSKI, A.; SHAPIRO, A.: Convex approximations of
chance constrained programs. SIAM Journal on Optimization,
v. 17, 969–996, 2006.
[PAS] PAGNONCELLI, B.K.; AHMED, S.; SHAPIRO, A. The Sample
Average Approximation method for chance constrained
programming: theory and applications. To appear in Journal
of Optimization Theory and Appplications, 2009.
[PP] PEREIRA, M.V.F.; PINTO, L.M.V.G. Multi-stage stochastic
optimization applied to energy planning. Mathematical Pro-
gramming, v. 52, p. 359–375, 1991.
[PBK] PETERS, R.J.; BOSKMA, K.; KUPPER, H.A.E. Stochastic pro-
gramming in production planning: a case with non-simple
recourse. Statistica Neerlandica, v. 31, p. 113–126, 1977.
[PREa] PREKOPA, A. Probabilistic programming. In A. Ruszczynski
and A. Shapiro, editors, Stochastic Programming, volume 10 of
Handbooks in OR & MS, North-Holland Publishing Company, p.
267-351, 2003.
[PREb] PREKOPA, A. Stochastic Programming. Kluwer Acad. Publ.,
Dordrecht, Boston, 1995.
[RW] ROCKAFELLAR, R.T.; WETS,R.J.-B. Variational Analysis.
Springer, Berlin, 1998.
[SHA] SHAPIRO, A. Monte carlo sampling methods. In
A. Ruszczynski and A. Shapiro, editors, Stochastic Program-
ming, volume 10 of Handbooks in OR & MS, North-Holland
Publishing Company, p. 353–425, 2003.
[SR] SHAPIRO, A.; RUSZCZYNSKI, A. Lectu-
res on stochastic programming. Available at
http://www2.isye.gatech.edu/~ashapiro/publications.html,
2008.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA
[VAN] VANDUFFEL, S. Comonotonicity: from risk measurement to
risk management. PhD thesis, University of Amsterdam, 2005.
[VDGK] VANDUFFEL, S., DHAENE, J., GOOVAERTS, M., KASS, R. The
hurdle-race problem. Insurance: Mathematics and Economics, v.
33, p. 405–413, 2003.
[WCZ] WANG, Y.; CHEN, Z.; ZHANG, K. A chance-constrained port-
folio selection problem under t-distrbution. Asia Pacific Jour-
nal of Operational Research, v. 24, p. 535–556, 2007.
[ZTSK] ZHU, M.; TAYLOR, D.B.; S. C. SARIN, S.C.; KRAMER, R.A.
Chance constrained programming models for risk-based
economic and policy analysis of soil conservation. Agricul-
tural and Resource Economics Review, v. 23, p. 58–65, 1994.
DBD
PUC-Rio - Certificação Digital Nº 0510535/CA

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo