
Behavioral Engineering and Brain Science in VRaliceabr/VR-class-lecture.pdfrelated mechanical...
44
Behavioral Engineering and Brain Science in Virtual Reality Bradly Alicea http://www.msu.edu/~aliceabr
-
Upload
phungxuyen -
Category
Documents
-
view
213 -
download
1
Transcript of Behavioral Engineering and Brain Science in VRaliceabr/VR-class-lecture.pdfrelated mechanical...

Behavioral Engineering and
Brain Science in Virtual
Reality
Bradly Alicea
http://www.msu.edu/~aliceabr

Introduction

Introduction
How can you use Virtual Reality to “engineer” and measure behavior?
Augmented Cognition

Introduction
How can you use Virtual Reality to “engineer” and measure behavior?
Augmented Cognition
Brain-Computer Interfaces
COURTESY: http://cnel.ufl.edu

Introduction
How can you use Virtual Reality to “engineer” and measure behavior?
Augmented Cognition
Brain-Computer Interfaces
VR for therapy Jeka Lab, University of Maryland
COURTESY: http://cnel.ufl.edu
PTSD Research, USC

Introduction
How can you use Virtual Reality to “engineer” and measure behavior?
Augmented Cognition
Brain-Computer Interfaces
VR for therapy
VR for neuroimaging Montague et.al, Nature 431, 760-767 (2004)
Jeka Lab, University of Maryland
COURTESY: http://cnel.ufl.edu
PTSD Research, USC

Background Readings
Bohil, C., Alicea, B., and Biocca, F. (2011). Virtual Reality in Neuroscience
Research and Therapy. Nature Reviews Neuroscience, 12, 752-762.

Background Readings
Bohil, C., Alicea, B., and Biocca, F. (2011). Virtual Reality in Neuroscience
Research and Therapy. Nature Reviews Neuroscience, 12, 752-762.
Alicea, B. (2011). Naturally Supervised Learning in Motion and Touch-driven
Technologies. arXiv: 1106:1105.
Behavioral
Engineering

The “Closed-Loop” System
Virtual
World Individual
Work with hybrots (Figure 1, Artificial
Life, 6, 307 -- 2000).
The “Closed-Loop” System
Virtual
World Individual
Loop is closed by FEEDBACK:
Physiological State of User
Work with hybrots (Figure 1, Artificial
Life, 6, 307 -- 2000).

The “Closed-Loop” System
Virtual
World Individual
Loop is closed by FEEDBACK:
Physiological State of User
Adaptive Control of Virtual World
Work with hybrots (Figure 1, Artificial
Life, 6, 307 -- 2000).
Figure 1,
Autonomous
Robots, 11,
305-310
(2001).
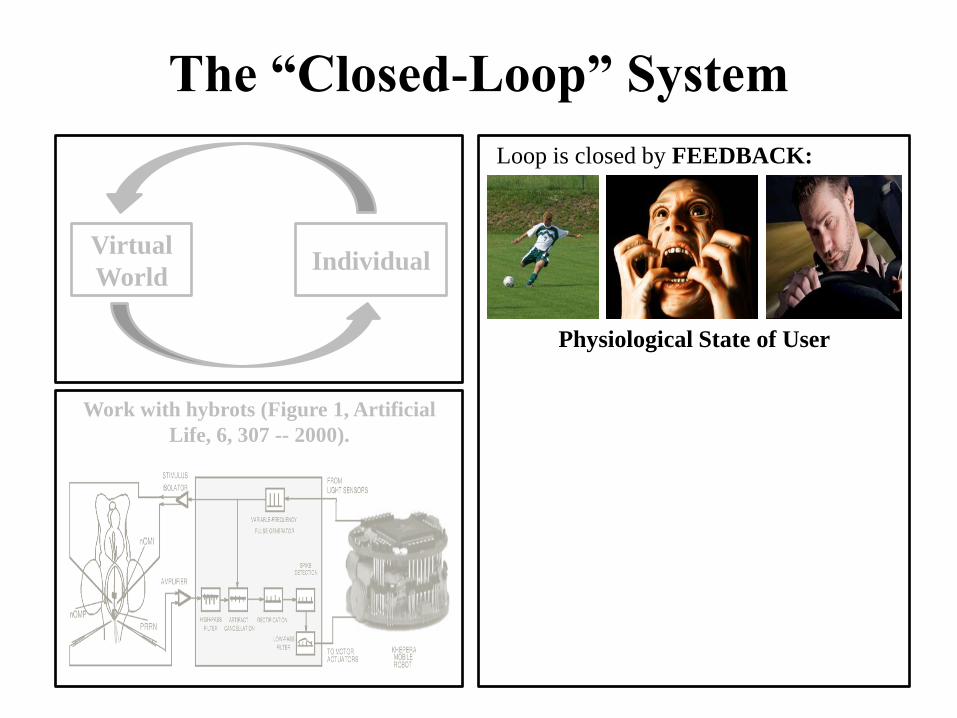
A Cybernetic Approach
“Design for an Intelligence Amplifier”
W.R. Ashby, 1958
X is the User (with a
brain and senses),
receiving inputs from
S via U.

A Cybernetic Approach
“Design for an Intelligence Amplifier”
W.R. Ashby, 1958
X is the User (with a
brain and senses),
receiving inputs from
S via U.
G is the feedforward from X to
S. Ashby thought of this as
“intelligence”.

A Cybernetic Approach
“Design for an Intelligence Amplifier”
W.R. Ashby, 1958
X is the User (with a
brain and senses),
receiving inputs from
S via U.
S is the amplifier.
Operates within a
range of values,
and uses selection
criterion on input
G.
G is the feedforward from X to
S. Ashby thought of this as
“intelligence”.

A Cybernetic Approach
“Design for an Intelligence Amplifier”
W.R. Ashby, 1958
X is the User (with a
brain and senses),
receiving inputs from
S via U. U is improvement in
performance due to S.
S is the amplifier.
Operates within a
range of values,
and uses selection
criterion on input
G.
G is the feedforward from X to
S. Ashby thought of this as
“intelligence”.

Examples from
Arousal and
BCI Design

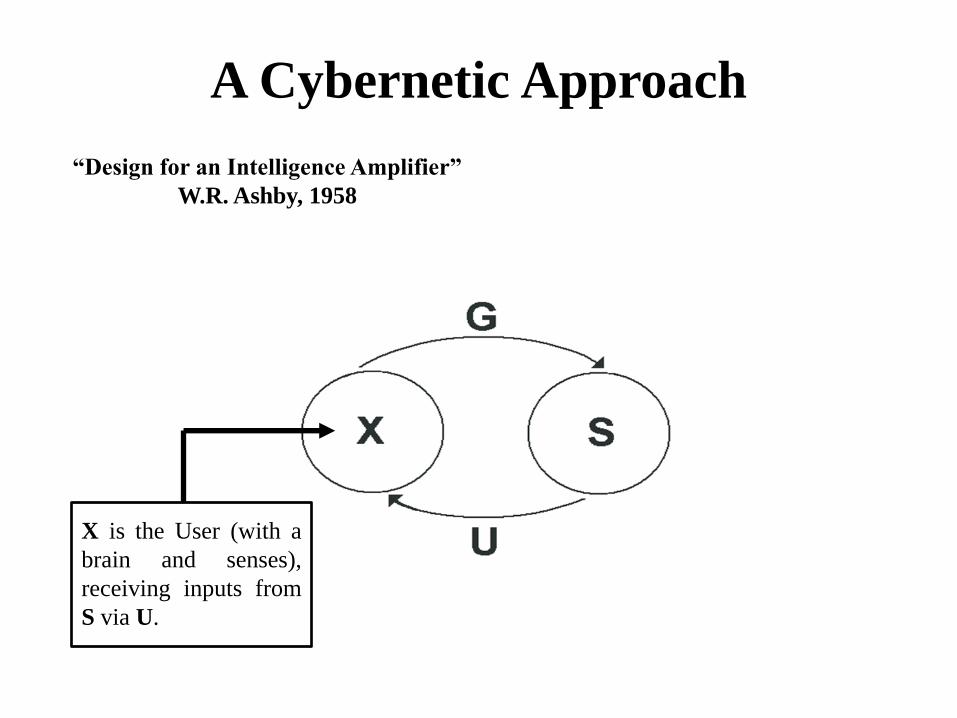
Mitigation of Sub-optimal Arousal Yerkes-Dodson Curve:
* model of arousal (attention,
wakefulness) in terms of performance.
* single performance optimum
(convexity).
OPTIMUM
Mitigation of Sub-optimal Arousal Yerkes-Dodson Curve:
* model of arousal (attention,
wakefulness) in terms of performance.
* single performance optimum
(convexity).
Mitigation Strategy:
* when performance deviates too far
(BLACK) from optimal point (RED),
performance is actively corrected.
OPTIMUM
Heads-up Display (Siemens VDO)

Mitigation of Sub-optimal Arousal Yerkes-Dodson Curve:
* model of arousal (attention,
wakefulness) in terms of performance.
* single performance optimum
(convexity).
Mitigation Strategy:
* when performance deviates too far
(BLACK) from optimal point (RED),
performance is actively corrected.
OPTIMUM
Heads-up Display
Optimal Range

Brain-Computer Interfaces
Figure 1, J. Neural Engineering, 4,
R32 (2007).
“Feedforward” signal
involves much
computation, post-
processing.
* signal processing
component (brain signals
to machine input).

Brain-Computer Interfaces
aaaaa
Figure 1, J. Neural Engineering, 4,
R32 (2007).
“Feedforward” signal
involves much
computation, post-
processing.
* signal processing
component (brain signals
to machine input).
Signal trace, acquisition

Brain-Computer Interfaces
aaaaa
Figure 1, J. Neural Engineering, 4,
R32 (2007).
“Feedforward” signal
involves much
computation, post-
processing.
* signal processing
component (brain signals
to machine input).
Signal trace, acquisition Segmentation, Classification
COURTESY: Mathematical Biosciences,
157(1–2), 303–320 (1999)

Brain-Computer Interfaces
aaaaa
Figure 1, J. Neural Engineering, 4,
R32 (2007).
“Feedforward” signal
involves much
computation, post-
processing.
* signal processing
component (brain signals
to machine input).
Signal trace, acquisition Segmentation, Classification Control Signal
COURTESY: Mathematical Biosciences,
157(1–2), 303–320 (1999)

Measuring
Neural Activity

What are we measuring?
Time-course Data and Elicited Responses
COURTESY: Gallant Lab,
Berkeley
COURTESY: MathWorks
COURTESY: Biopac

Building a Controlled Environment
Two advantages to using virtual
environments as stimuli:
1) high degree of control and
selective manipulation.
* design custom objects with unique
physical properties.
2) introduce naturalistic contexts.
* observe behavior as it occurs in the
real world.

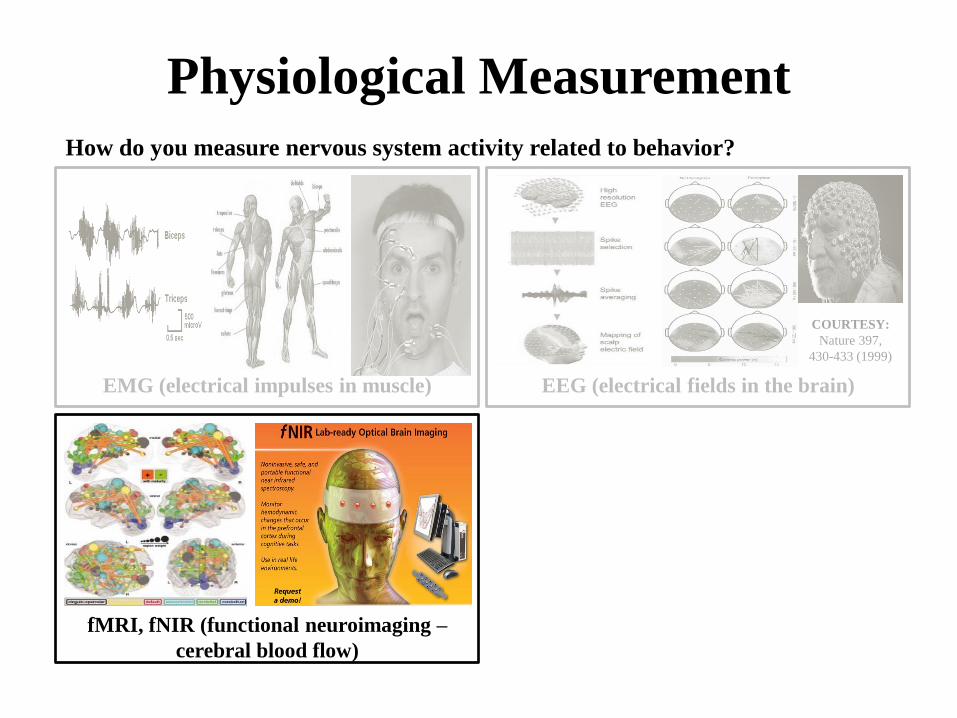
Physiological Measurement
How do you measure nervous system activity related to behavior?
EMG (electrical impulses in muscle)

Physiological Measurement
How do you measure nervous system activity related to behavior?
EMG (electrical impulses in muscle) EEG (electrical fields in the brain)
COURTESY:
Nature 397,
430-433 (1999)
Physiological Measurement
How do you measure nervous system activity related to behavior?
EMG (electrical impulses in muscle)
fMRI, fNIR (functional neuroimaging –
cerebral blood flow)
EEG (electrical fields in the brain)
COURTESY:
Nature 397,
430-433 (1999)
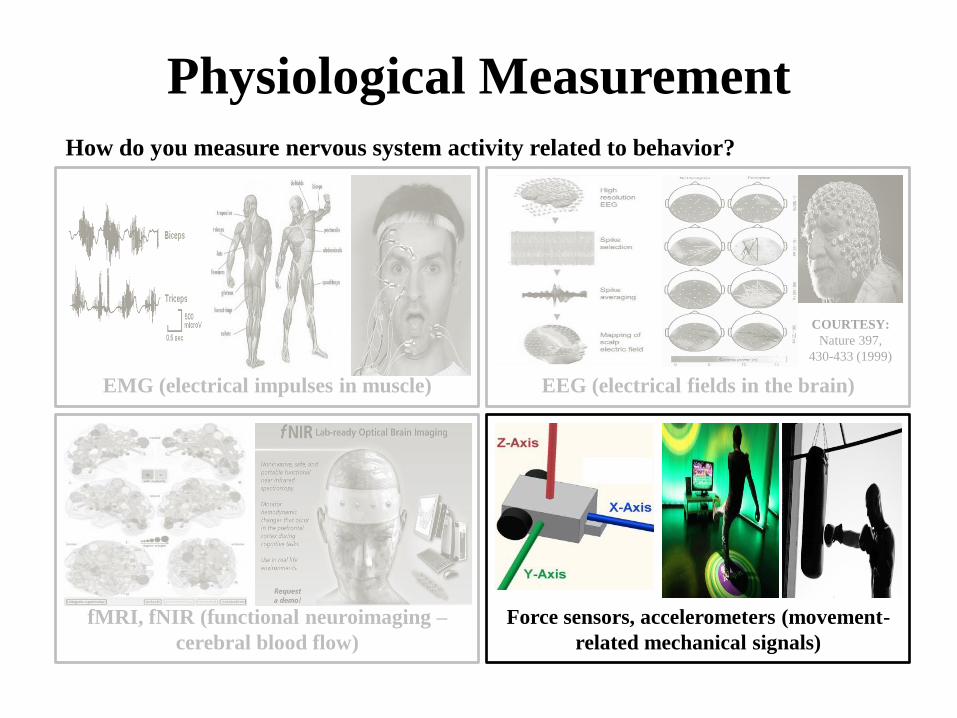
Physiological Measurement
How do you measure nervous system activity related to behavior?
EMG (electrical impulses in muscle)
fMRI, fNIR (functional neuroimaging –
cerebral blood flow)
EEG (electrical fields in the brain)
Force sensors, accelerometers (movement-
related mechanical signals)
COURTESY:
Nature 397,
430-433 (1999)

Examples of
Nervous System
Measurement

Touch- and Motion-driven
Technologies What if we could decouple human motion from “real-world” physics?
* perturbation – interference with typically-experienced physics during a movement,
activity.
* removal of perturbation – removal of forces associated with interfereing with
typically experienced physics (loaded = perturbation vs. unloaded = removal).

Touch- and Motion-driven
Technologies What if we could decouple human motion from “real-world” physics?
* perturbation – interference with typically-experienced physics during a movement,
activity.
* removal of perturbation – removal of forces associated with interfereing with
typically experienced physics (loaded = perturbation vs. unloaded = removal).
Pre-trial Trials Trials Trials Trials Trials
Real-world L U U L L
LOADED:
composite golf club
driver with weight
(forcing chamber).
UNLOADED:
performance of activity
without associated
rotational, inertial forces
(motion capture only).

Touch- and Motion-driven
Technologies
Measurement techniques:
Mapped Physiological Output (MPO):
Can the subject move a virtual object
to a target? Related to magnitude of
force production:
* subject produces x amount of force,
mapped to virtual world object
movement.
BEHAVIORAL

Touch- and Motion-driven
Technologies
Measurement techniques:
Mapped Physiological Output (MPO):
Unmatched Muscle Power (UMP):
Can the subject move a virtual object
to a target? Related to magnitude of
force production:
* subject produces x amount of force,
mapped to virtual world object
movement.
EMG amplitude (RP) and MPO are
used as a proxy for force production :
* Subject produces x amount of force,
muscles contract, “force” is measured
indirectly in two ways.
BEHAVIORAL
HYBRID

Touch- and Motion-driven
Technologies
Measurement techniques:
Mapped Physiological Output (MPO):
Unmatched Muscle Power (UMP):
EMG signal spikiness (z):
Can the subject move a virtual object
to a target? Related to magnitude of
force production:
* subject produces x amount of force,
mapped to virtual world object
movement.
EMG amplitude (RP) and MPO are
used as a proxy for force production :
* Subject produces x amount of force,
muscles contract, “force” is measured
indirectly in two ways.
BEHAVIORAL
PHYSIOLOGICAL
HYBRID
z parameter used to characterize
variance in the amplitude of a signal
(time-series) over interval i.

Touch- and Motion-driven
Technologies Surface simulations: “virtual” surface reaction forces may allow us to manipulate
muscle function.
Applications to touch screens, motion capture systems (Kinect API), physical
therapy.

Touch- and Motion-driven
Technologies Surface simulations: “virtual” surface reaction forces may allow us to manipulate
muscle function.
Applications to touch screens, motion capture systems (Kinect API), physical
therapy.

Touch- and Motion-driven
Technologies Surface simulations: “virtual” surface reaction forces may allow us to manipulate
muscle function.
Applications to touch screens, motion capture systems (Kinect API), physical
therapy.
COURTESY: Magic Vision Lab

“Virtual” Animal Model Research
Virtual Environments can also be
used to study animal nervous
systems (basic science):
* insect VR – an arena that simulates
visual and olfactory cues in an
adaptive (e.g. closed-loop) fashion.
Clockwise from top left:
Flight arena for insects
(COURTESY: Janelia
Farm).

“Virtual” Animal Model Research
Virtual Environments can also be
used to study animal nervous
systems (basic science):
* insect VR – an arena that simulates
visual and olfactory cues in an
adaptive (e.g. closed-loop) fashion.
* manipulate specific sensory
systems, provides a means to study
animal cognition and neurobiology
for which animal models are used.
Clockwise from top left:
Flight arena for insects
(COURTESY: Janelia
Farm).
Airborne Cue Control:
Nature Methods, 9(3),
290-296 (2012).

“Virtual” Animal Model Research
Virtual Environments can also be
used to study animal nervous
systems (basic science):
* insect VR – an arena that simulates
visual and olfactory cues in an
adaptive (e.g. closed-loop) fashion.
* manipulate specific sensory
systems, provides a means to study
animal cognition and neurobiology
for which animal models are used.
* creates a naturalistic environment
that can be easily controlled
(ecological validity).
Clockwise from top left:
Flight arena for insects
(COURTESY: Janelia
Farm).
Airborne Cue Control:
Nature Methods, 9(3),
290-296 (2012).
Setup for moth VR. From
NRN paper.

Sensory Engineering and VR Design
Two design principles: 1) Multisensory Integration: Senses are combined to produce cognitive behaviors (vision + audition, vision + touch).
* virtual stimuli presented to user, senses merged in their brains leads to synthetic,
suppressive cognitive effects. Decoupling senses can have as big of an effect as
strategically combining them.
2) Exploit Neural and Sensory Processing: Use the immediate and long-term features of sensory and other neural processing to build more effective virtual worlds. * arXiv paper experiments: altering experienced forces in bursts uncovers sensory and neuromuscular constraints of individual users. Interactions between short-term adaptations and longer-term memory.

![DRIVEN BY VISIBILITY...Daewoo Cielo [T-Car] 1995.07 2001.03 3 397 011 646 3 397 011 646 3 397 005 293 3 397 016 578 3 397 016 578 Matiz 1998.11 2002.02 3 397 011 650 3 397 011 643](https://static.fdocuments.in/doc/165x107/6112d7f249975425bc587ce5/driven-by-visibility-daewoo-cielo-t-car-199507-200103-3-397-011-646-3-397.jpg)







![Sweets @ 435 2- ¥1,112 ,200] No. 430 Cold Rusk Honey ......Sweets @ 435 2- ¥1,112 ,200] No. 430 Cold Rusk Honey Toast No. 432 No. No. 436 No. 433 Chocolate Banana Honey Toast ¥908](https://static.fdocuments.in/doc/165x107/5f944f74a1f85d431d3f6bcc/sweets-435-2-1112-200-no-430-cold-rusk-honey-sweets-435-2-1112.jpg)








