Basics of Seismic Wave Theory
154
Basics of Seismic Wave Theory Gerard T. Schuster University of Utah March 23, 2007
-
Upload
yinfeng-dong -
Category
Documents
-
view
567 -
download
7
Transcript of Basics of Seismic Wave Theory

Basics of Seismic Wave Theory
Gerard T. SchusterUniversity of Utah
March 23, 2007

Contents
1 Physics of Acoustic Wave Propagation 1
2 Physics of Elastic Wave Propagation 27
3 Eikonal Equation 63
4 Traveltime Tomography 77
5 Basics of Seismic Exploration 93
6 Practical Migration 115
i

Preface
These are the notes for the 5-day course ”Basics of Seismic Wave Theory” presentedat Capetown University in April, 2007. They are intended as a supplement to the lecturesand provide the advanced undergraduate and 1st-year graduate student with a basic under-standing of seismic wave theory. The applications are for both earthquake and explorationseismology, but the emphasis is on exploration geophysics.
The lectures begin with an overview of seismology with applications to both earthquakestudies and exploration geophysics. This is followed by discussions of the physics of acousticand elastic wave propagation. Topics to be covered include the stress-strain relations, thewave equation, solutions to the two-layer problem, wave types such as P, SV, SH, Rayleigh,and Love, Snell’s law, the eikonal equation, Green’s theorem, reflection and transmissioncoefficients, wavefronts, rays, head waves, AVO, wavelength, energy, and attenuation. Theseprinciples will be used to understand the imaging concepts of traveltime tomography andwaveform migration.
A separate handout will be given that outlines the lecture and exercise schedule studentswill complete during the 5 days. MATLAB labs will be used to turn concept into practice asthe student will cover a range of topics, including forward modeling, traveltime computation,epicenter location, migration of seismic data, and other principles covered in the lectures.After diligent study, the student will be able to move on to the more advanced concepts oftheoretical seismology presented in Aki and Richards (1980).
ii

Chapter 1
Physics of Acoustic Wave Propagation
The theory of acoustic wave propagation is now described. This is an important theory inits own right because explorationists often assume that rocks behave acoustically so thatthey can simplify their data processing algorithms. The acoustic approximation says thatshear effects in the data are negligible and the dominant wave type is a compressionalwave, a wave where the particle motion is parallel to the propgation direction. This isan acceptable approximation for somewhat layered media, near-offset traces recorded byvertical component phones, and surface-wave filtered data. To deepen our understandingof this acoustic approximation we now present an overview of the physics of the acousticwave equation. A good background reference book is Aki and Richards (1980) and Kinlserand Frey (1961).
1.1 Acoustic Media and Acoustic Waves
Assume a compressible, non-viscous (i.e., no attenuation) fluid with no shear strength and inequilibrium (i.e., no inertial forces). Small localized displacements of the fluid will propagateas an acoustic wave, also known as a compressional wave. Due to the lack of shear strength,localized deformations of the medium do not result in shear deformations but instead causechanges in the fluid element’s volume, as shown in Figure 1.1.
The equilibrium force/unit area on the face of a volume element will be called the time-independent equilibrium pressure Peq(r), while the change in pressure due to a localizedcompressional wave will be denoted as P (r, t). For example, the atmospheric pressuredecreases with elevation increases and can be considered to be independent of time. If Ibegin talking, however, I excite transient acoustic waves P (r, t) that disturb the equilibriumpressure.
Snapshots of the particle distribution for a condensation wave and a rarefraction waveare shown in Figure 1.1. In the compressional case the element volume is filled with denser(shaded) air while in the rarefraction case the element volume has lighter (unshaded) airthan the surrounding medium. We can physically create the condensation wave by injectingair from our lungs into the medium (HELLLL!), and the rarefraction wave by sucking airinto our lungs (UHHHHH!). Using a spring-mass model, rarefractions are created by pullinga spring (i.e., tension) and condensations by compressing a spring (compressions).
1

2 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
Equilibrium
CompressionRarefraction
Figure 1.1: Cube of air in (top) equilibrium and (bottom) disturbed from equilibrium. Thelower left diagram depicts a rarefraction where the surrounding medium pulls the cube intoa larger volume so that the air density is less than the surrounding medium. The lowerright diagram is similar, except the surrounding medium compresses the cube into a smallervolume resulting in denser air.

1.2. ACOUSTIC HOOKE’S LAW: P = −κ∇ ·U 3
dx
dx dy dzdu dv dw+ +du dv dw
1-D Spring
du {equilibrium disturbed state
3-D Acoustic Cube
dz
equilibrium disturbed state
dy
{dw
du
{dv
du dv dw
disturbance=
} }=dVV dx dy dz
du dydz + dv dxdz + dw dxdy}
Figure 1.2: (Top) Spring in (left) equilibrium and (right) disturbed from equilibrium. (Bot-tom) Elemental cube of air in (left) equilibrium and (right) disturbed from equilibrium. Inthis case the cube has expanded so net tensional forces of surrounding medium must beexpanding cube. Note that the 1st-order volume change is outlined by the solid heavy lines,where the higher-order terms are associated with the corner parts.
1.2 Acoustic Hooke’s Law: P = −κ∇ · uHooke’s law for an acoustic medium says stress is linearly proportional to strain for small”enough” strains. A simple 1-D example will first be given to demonstrate Hooke’s law,and then we will apply it to the case of an acoustic medium.
1. 1-D Spring: The force on a mass connected to a spring disturbed from equilibrium(see Figure 1.2) is given by
F = −k(du/l)k, (1.1)
where du is the displacement from equilibrium, k is the spring constant, l is the lengthof the spring in equilibrium, and k is the downward point unit vector in Figure 1.2.The ratio du/l is also known as the compressional strain of the spring model. Notethat in the equilibrium position there is no motion because the gravitational forcebalances the elastic force. When disturbed, the net force on the mass is given by theabove equation.
2. 3-D Acoustic Springy Cube: Hooke’s Law says that the surrounding disturbedmedium exerts a pressure on the face of the cube that is linearly proportional to the

4 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
corresponding volume change of the cube. That is,
P = −κdV/V, (1.2)
where dV is the change in volume after disturbance, V is the undisturbed cube volume,and κ is the bulk modulus. Note that a volume change is the 3-D equivalent of a 1-Ddisplacement change.
Figure 1.2 shows that the relative volume change dV/V is given by:
dV
V= [dxdydz − (dx+ δu)(dy + δv)(dz + δw)]/(dxdydz),
=δudydz + δvdxdz + δwdxdy
dxdydz+O(2nd− order terms)
≈ ∂u
∂x+∂v
∂y+∂w
∂z, (1.3)
where V = dxdydz is the cube’s volume before the disturbance. Substituting equa-tion 1.3 into equation 1.2 yields:
P = −κ(x, y, z)∇ · u + S(x, y, z, t), (1.4)
where u = (u, v, w) are the cartesian components of displacement along the x, y, andz axes and S(x, y, z, t) is a time dependent source term that is independent of thedisplacement field. For example, S(x, y, z, t) can be a source that injects material intothe medium such as an air gun used for marine seismic surveys. Often the spatialand temporal variables are suppressed for the P and u field variables, but the spatialcoordinates are explicitly expressed for the bulk modulus to remind the reader thatthe physical properties of the medium can vary with location.
Note:
• Neglecting second-order terms is the small displacement approximation, valid forδV/V < 10−4 or sound quieter than a jet engine (Kinsler and Frey, 1961, Funda-mentals of Acoustics).
• Sign convention: P is the force/area that the surrounding medium exerts on the faceof the elemental cube, where tensions (force pointing away from cube into externalmedium) are negative and compressions (force pointing into cube) are positive. Forexample, the divergence of u is positive if the volume expands by tensional forces,which is consistent with the sign in equation 1.4.
1.3 Newton’s Law: ∂P/∂x = −ρ(x, y, z)∂2u/∂t2
The external force on an acoustic cube is given in Figure 1.3. These forces have a non-zerogradient along the x-axis, and so there is a net elastic force imposed upon the cube by theexternal medium. This net force must be balanced by an inertial force (i.e., it accelerates)so that Newton’s law says:
[P (x+ dx, y, z, t)− P (x, y, z, t)]dydz ≈ −[ρ(x, y, z)dxdydz]u(x, y, z, t), (1.5)

1.3. NEWTON’S LAW: ∂P/∂X = −ρ(X,Y, Z)∂2U/∂T 2 5
P(x, y, z, t) P(x+dx, y, z, t)
....
TENSIONS ARE PULLS (-)
COMPRESSIONS ARE PUSHES (+)
.Figure 1.3: External (top) tension and (bottom) compressional forces on an elemental cube.In the lower case there exists a spatial gradient of the disturbed pressure field along thex-axis.
where the double dot corresponds to two time derivatives. Expanding the LHS in a Taylorseries about the point (x, y, z) we get
[P (x, y, z, t)− P (x, y, z, t) +∂P
∂xdx+High−Order Terms]dydz ≈
−[ρdxdydz]u(x, y, z, t), (1.6)
and dividing by dxdydz and neglecting higher-order terms we get the wave equation:
∂P (x, y, z, t)∂x
= −ρ(x, y, z)u(x, y, z, t). (1.7)
For an arbitrary force distribution the general form of Newton’s law is:
∇P = −ρ(x, y, z)u(x, y, z, t), (1.8)
where u(x, y, z, t) is the particle acceleration vector.Note:

6 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
• The minus sign is used so that we are consistent with the notation for pressure. IfP (x+ dx, y, z, t) is positive and greater than P (x, y, z, t) in Figure 1.3 then the cubeshould accelerate to the left, which it will according to the above form of Newton’sLaw.
1.4 Acoustic Wave Equation
Applying ∂2/∂t2 to equation 1.4 and applying∇· to equation 1.8 after dividing by /ρ(x, y, z)gives:
P = −κ(x, y, z)∇ · u + S(x, y, z, t), (1.9)
∇ · [1/ρ(x, y, z)∇P ] = −∇ · u, (1.10)
where u= ∂2u/∂t2. The above two equations are the first-order equations of motion in anacoustic medium. Substituting equation 1.9 into equation 1.10 yields the 2nd-order acousticwave equation:
∇ · (1/ρ(x, y, z)∇P )− 1/κ(x, y, z)P = −S(x, y, z, t)/κ(x, y, z). (1.11)
This equation is valid for arbitrary velocity and density distributions.Assuming negligible density gradients the above equation reduces to the oft-used wave
equation:
∇2P − 1c2
∂2P∂t2
= −ρ(x, y, z)S(x, y, z, t)/κ(x, y, z), (1.12)
where
c =√κ(x, y, z)/ρ(x, y, z) , (1.13)
and c is the compressional wave propagation velocity.The above equation is known as the inhomogeneous acoustic wave equation for negligible
density variations, expressed as
∇2P − c−2∂2P/∂t2 = F , (1.14)
where F = −S(x, y, z, t)/κ(x, y, z) is the inhomogeneous source term that specifies thelocation and time history of the source. For example, F specifies the strength of the hammerblow and its location in an experiment.
1.5 Solutions of the Wave Equation
The physics of wave propagation will now be explained using some special solutions to thewave equation. A harmonic plane wave propagating in a homogeneous medium will be firstexamined, and then the case of a 2-layered medium will be studied. Figure 1.4 depicts theoscillations of a harmonic wave as measured by a geophone.

1.5. SOLUTIONS OF THE WAVE EQUATION 7
4
ApparentWavelength
4sinΦ
Amplitude
T/4}
dx/dt =
Tim
e
T
ApparentVelocity
Wavelength True
sin
Φ
Φ
T=period
Propagating Plane Wave
Figure 1.4: 2-D harmonic wavefront propagating onto a horizontal plane with incidenceangle φ measured with respect to the vertical line. Seismograms are depicted, where theamplitude, wavelength λ, period T , and apparent velocity dx/dt in the x-direction aredefined. The actual propagation velocity is c = λ/T .

8 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
1.5.1 1-D Wave Propagation in an Homogeneous Medium
A harmonic wave oscillates with period T and has a temporal dependence usually givenby eiωt, where ω = 2π/T is the angular frequency inversely proportional to the periodT . A plane wave is one in which the wavefronts line up along straight lines, and can bedescribed by the following function:
P (x, t) = A0ei(kx−ωt) (1.15)
which also solves the homogeneous wave equation 1.12. This can be shown by pluggingequation 1.15 into equation 1.12 to get
(k2 − (ω/c)2)P (x, z, t) = 0, (1.16)
which admits non-trivial solutions if
k2 = (ω/c)2. (1.17)
This equation is known as the dispersion equation and imposes a constraint on the temporaland spatial variables in the Fourier domain. It says that the wavefront will move a distanceof one wavelength λ during one period T of elapsed time, and the propagation velocity ofthis movement is equal to c =
√κ/ρ. See Figure 1.5 for an illustration of a plane wave
propagating plotted as Offset vs Time.The real part of equation 1.15, i.e., cos(kx−ωt), plots out as slanted lines in x− t space,
and these lines move to the right as t increases. In an x − y − z volume, these lines (orwavefronts) become planes that are perpendicular to the x-axis. Therefore this functionrepresents a plane wave propagating along the x-axis. The shortest distance between 2adjacent peaks of the wavefront is defined to be the wavelength λ and its reciprocal isgiven by k = 2π/λ, where k is known as the wavenumber. Using this definition of k andthat for ω = 2π/T the dispersion relation can be re-expressed as:
c = λ/T. (1.18)
The constant c is also defined in terms of the material properties of the rock as c =√κ/ρ,
otherwise known as the compressional wave velocity.Note: The function ei(kx−ωt) describes a right-going plane wave and ei(kx+ωt) describes a
left-going wave. To see this, note that we follow a wavefront if the phase φ = (kx−ωt) staysconstant for an increase in both t and simultaneous increase in x (such that x/t = ω/k).Because x increases this means that the wave is moving to right with the compressionalvelocity given in equation 1.18. Conversely, φ = (kx+ ωt) is a constant if t increases and xdecreases; thus, the wave is moving to left.
1.5.2 2-D Wave Propagation in an Homogeneous Medium
The following function
P (x, z, t) = A0ei(k·r−ωt), (1.19)

1.5. SOLUTIONS OF THE WAVE EQUATION 9
0
0.05
0.1
0.15
0.2
0
0.05
0.1
0.15
0.2
−1
−0.5
0
0.5
1
Offset (m)Time (s)
Offset (m)
Tim
e (s
)
0 0.05 0.1 0.15
0
0.02
0.04
0.06
0.08
0.1
0.12
Wavelength
Period
Figure 1.5: 2-D wavefront propagating along the Offset coordinate.

10 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
k
T
xλ = /cos( )λ
APPARENT WAVELENGTHS
φ
λ
λz
x
φλλz = /sin( )
λ φ
Figure 1.6: 2-D wavefront propagating along the direction parallel to the wavenumber kvector.
solves the wave equation 1.12, where the wavenumber vector is given by k = (kx, kz) andthe observation vector is given by r = (x, z). Similar to the 1-D dispersion equation, the2-D dispersion equation can be derived by plugging 1.19 into equation 1.12 to get
k2x + k2
z − (ω/c)2 = 0. (1.20)
The real part of equation 1.19, i.e., cos(kxx + kzz − ωt), plots out as straight linesperpendicular to the wavenumber vector k, and these lines propagate in a direction parallelto k as t increases. This is easy to prove because the general equation for a straightline is given by k · r = cnst, where k is a fixed vector perpendicular to the straight line.The locus of points that satisfy this equation defines the wavefront where the phase (i.e.,φ = kxx + kzz − ωt) is a constant. Thus as the time increases, i.e. as cnst increases, thestraight line also moves such that the direction of movement is parallel to the fixed k vector,as shown in Figure 1.6.
Therefore equation 1.19 represents a harmonic plane wave propagating along the direc-tion parallel to k. Similar to the discussion for a 1-D plane wave, the shortest distancebetween two adjacent peaks of the wavefront is defined to be the wavelength λ and is givenby λ = 2π/k, where k =
√k2
x + k2z is known as the wavenumber. Using this definition
of k and that for ω the 2-D dispersion relation takes the same form as equation 1.18. A

1.5. SOLUTIONS OF THE WAVE EQUATION 11
0
0.05
0.1
0.15
0.2
0
0.05
0.1
0.15
0.2
−1
−0.5
0
0.5
1
Offset (m)Time (s)
Offset (m)
Time (
s)
0 0.05 0.1 0.15
0
0.02
0.04
0.06
0.08
0.1
0.12
Figure 1.7: (Left) 3D seismograms and (right) 2D seismograms.
good illustration of the relationship between the wavenumber vector and the direction ofwave propagation is given in the movie. Here the left figure is a plot of points in (kx,kz)space, and the right figure is the corresponding snapshot of the harmonic plane wave. Notethat as the length of the wavenumber vector increases the wavelength decreases, and as thewavenumber direction changes so does the direction of the propagating wave.
1.5.3 Plane Wave Propagation in a 2-Half Space Medium
Figure 1.8 depicts a plane harmonic wave normally incident on an interface separating twohalf-spaces of unequal stiffness. The functions are those for the up and downgoing solutionsof the wave equation, but it is understood that the geophones record the sum of the up- anddown-going wavefields, the total wavefield. That is, the total pressure fields in the upper(+) and lower (-) media are expressed as
P+(z) = eikz +Rpe−ikz, (1.21)
P−(z) = Tpeikz, (1.22)
where Rp and Tp denote the pressure reflection and transmission coefficients, respectively.The harmonic function eiωt has been harmlessly dropped because it cancels out in the finalexpressions for Pp and Tp.
The two unknowns in these linear equations, Rp and Tp, can be determined by imposingtwo equations of constraints at the interface at z = 0: continuity of pressure across theinterface
P+(z = 0) = P−(z = 0) → [eikz +Rpe−ikz]|z=0 = Tpe
ikz|z=0,
or
1 +Rp = Tp, (1.23)

12 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
T e
R ee
ik’z
ik z -ik zc
c’
ρ
ρ’
xz
Incident Wave Reflected Wave
Transmitted Wave
Figure 1.8: Plane wavefront normally incident on a flat interface that separates two homo-geneous media. The unprimed medium indicates that of the incident wave.
and continuity of particle velocity (recall Newton’s Law in equation 1.8) across the interface
1/ρ∂P+/∂z|z=0 = 1/ρ′∂P−/∂z|z=0 → 1/ρ∂/∂z(eikz +Rpe−ikz)|z=0
= 1/ρ′∂/∂z(Tpeikz)|z=0,
or
(k/ρ)(1−Rp) = (k′/ρ′)Tp, (1.24)
Setting k = ω/c and k′ = ω/c′, and solving for Rp in equations 1.23 and 1.24 yields thepressure reflection and transmission coefficients for a normally incident plane wave on a flatinterface:
Rp = (ρ′c′ − ρc)/(ρ′c′ + ρc), (1.25)
Tp = 2ρ′c′/(ρ′c′ + ρc). (1.26)
Here ρc is known as the impedance of the medium, and roughly indicates the stiffness ofa medium. For example, a plane harmonic plane wave in a homogeneous medium exertsa pressure denoted by P = eikx−iωt and has a particle velocity denoted by u = k/(ρω)P=1/(ρc)P . Therefore, the ratio P/u becomes
P/u = ρc. (1.27)

1.5. SOLUTIONS OF THE WAVE EQUATION 13
e-ikze-ikzeikz- eikz-
P = 0 at the Free Surface
’
xz
Node
Upgoing Downgoing Total Field
Figure 1.9: The pressure at the free surface is always zero because the air has no stiffnessto resist motion. Mathematically, the downgoing wave has equal and opposite amplitudeto the upgoing wave at the free surface.
This says that decreasing impedances imply larger particle velocities for a fixed elasticpressure on a cube’s face. This is exactly what one would expect in a really soft medium:larger displacements for springier-softer rocks, which is one of the reasons that earthquakesshake sediment-filled valleys more than the surrounding bedrock. Conversely, stiffer medialead to smaller displacements for a given elastic pressure.
Note:
• The pressure reflection coefficient is negative if the impedance of the incident layeris greater than that of the refracting layer, i.e., ρc > ρ′c′. Thus gas sands (whichtypically have lower velocity than the overlying brine sand) have negative polarityreflections.
• The free-surface reflection coefficient due to an upcoming wave is Rp = −1 becausethe rock impedance of the incident layer is greater than that of air (impedance of air≈ 0 so ρc > ρ′c′ = 0). Equation 1.21 says that the total pressure field value on thefree surface is P = 1 +R= 1− 1 = 0! See Figure 1.9.
• In a land experiment geophones record particle velocity of the ground while a marineexperiment records pressure with hydrophones. If P = 0 on the free surface thenwe must lower the hydrophones several feet beneath the water surface, otherwise werecord nothing.
• The pressure transmission coefficient Tp is larger than 1 if the incident medium has a

14 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
lower impedance than the refracting medium, i.e. ρc < ρ′c′. For a given displacement,a really stiff medium exerts a greater elastic pressure than a soft medium. Checkout the ¡a href=”fd1mov.mpg”¿movie¡/a¿ of a 1-D propagating wave and see if thetransmission amplitude changes and the polarity of the reflection changes accordingto the reflection and transmission formulae derived above.
1.5.4 Reflection Coefficient for Particle Velocity
Marine experiments measure the pressure field, so this is why the hydrophones must besufficiently below the sea surface in order to measure a non-zero pressure. On the otherhand, land experiments use geophones that measure the particle velocity. Typically, onlythe vertical component of particle velocity is measured. The reflection coefficient for particlevelocity has a different form than that for pressure. To see this, assume that the up anddowngoing vertical particle-velocity fields in the top and bottom layers are given by
w+(z) = eikz +Rwe−ikz,
w−(z) = Tweik′z. (1.28)
The boundary conditions at the interface are continuity of vertical-particle velocity w+|z=0 =w−|z=0 and pressure κ∂w+/∂z|z=0 = κ′∂w−/∂z|z=0, where Hooke’s law is used w =−κ∂P/∂z = −ρc2∂P/∂z.
These two continuity conditions yield the following boundary conditions:
1 +Rw = Tw,
ρc(1−Rw) = (1 +Rw)ρ′c′, (1.29)
which can be solved for the particle velocity reflection and transmission coefficients:
Rw = (ρc− ρ′c′)/(ρ′c′ + ρc), (1.30)
Tw = 2ρc/(ρ′c′ + ρc), (1.31)
where the unprimed variables again refer to the medium of the incident wave, and thesubscript w denotes vertical-particle velocity. Note that the reflection coefficient above willhave opposite polarity compared to the pressure reflection coefficients. Also, note that insome cases the transmitted amplitude can be greater than the amplitude of the incidentwave! Does this violate conservation of energy? No, energy is the squared modulus ofamplitude scaled by the impedance (see later section). Thus, a weaker medium with weakrocks (small impedance) can have transmit larger amplitude waves than the incident wavesin a much stronger (larger impedance) medium. It takes much more energy to rapidlydisplace strong rock 1 mm than it does in a weak rock.
Free-Surface Reflection Coefficent. The particle velocity reflection coefficient is equalto +1 at the free surface, so the total particle velocity field at the free surface is 1+Rw = 2.Thus the free surface, because it straddles a zero stiffness medium, can oscillate with greatvigor and has the largest amplitude compared to the underlying rock motion in a half-space.When an earthquake hits, dig a hole, jump in, and cover yourself with dirt! See Figure 1.11.

1.6. OBLIQUE INCIDENCE ANGLES, REFLECTION COEFFICIENTS AND SNELL’S LAW15
1.6 Oblique Incidence Angles, Reflection Coefficients andSnell’s Law
If the incidence angle θ of the plane wave is non-zero (measured w/r to the normal) then thenormal derivatives in equation 1.24 bring down kz rather than k. Therefore, equation 1.24becomes
(kz/ρ)(1−Rp) = (k′z/ρ′)Tp,
(1.32)
or kz = 2πcos(θ)/λ and k′z = 2πcosθ′/λ′
(cosθ/(λρ))(1−Rp) = (cosθ′/(λ′ρ′))Tp, (1.33)
and because λ = c/f we have
(cosθ/(cρ))(1−Rp) = (cosθ′/(c′ρ′))Tp. (1.34)
Solving for the reflection coefficient yields
Ru = (cosθ′ρc− cosθρ′c′)/(cosθρ′c′ + cosθ′ρc), (1.35)
If the horizontal wavenumbers in the upper (kx = ωsinθ/c) and lower medium (k′x =ωsinθ/c′) are equated, k′x = kx, then this implies Snell’s law:
sin θ/c = sinθ′/c′. (1.36)
This means that transmission rays bend across an interface, bending towards the verticalwhen entering a slower velocity medium and bending towards the horizontal when enteringa faster medium (see Figure 1.12). At the critical incidence angle θcrit the refraction angleof the transmitted ray θ′ is 90 degrees so that Snell’s law says θcrit = arcsin(c/c′) if c′ > c.This gives rise to refraction head waves that propagate parallel to the interface at thevelocity c′ of the underlying medium (see Figure 1.10).
A consequence of Snell’s law is that a medium with a velocity that increases linearlywith depth always turns a downgoing ray back towards the surface, as shown in Figure 1.12.This can easily be shown by approximating the linear velocity gradient medium with a stackof thinly-spaced layers, each with a homogeneous velocity that slightly increases with depth.The velocity increase is the same across each layer. Applying Snell’s law to a downgoingray shows that each ray transmitted across an interface bends a little bit more towards thehorizontal until it goes back up. As the thickness of eash layer decreases, the ray trajectorywill be the arc of a circle.
Why did we equate the upper and lower medium wavenumbers? We did this becausethe apparent horizontal velocities along the interface must be equal to one another (i.e.,vx = ω/kx = vx′ = ω/kx′). The horizontal velocities of the incident and transmitted wavesmust be equal at the interface otherwise they would break away from one another and notbe coupled at the interface.
How does the formula for transmission coefficient in equation 1.31 change for an obliqueincidence angle?

16 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
V1
V2
V1 V2<
Head Wave
Reflected Wave
Direct Wave
X
X
Tim
e (s
) Head Wave
Reflected Wave Direct Wave
critical distancecrossover distance
h
Figure 1.10: Ray diagram and traveltime curves for head and reflected waves in a 2-layermedium.

1.7. ENERGY OF PROPAGATING ACOUSTIC WAVES 17
e-ikze-ikz
’
xz
Upgoing Downgoing Total Field
Anti-Node
eikzeikz+ +
Vertical Displacement at the Free Surface
Figure 1.11: The vertical displacement at the free surface is maximum because no elasticresistance at z = 0 means vigorous ground shaking. Mathematically, the downgoing wavehas equal amplitude to the upgoing wave at the free surface.
1.7 Energy of Propagating Acoustic Waves
Elastic energy is stored in a cube of acoustic material as it is deformed from equilibrium.That is, squeeze a cube of acoustic material, release it, and then the cube moves to performwork on the medium. In the deformed state the potential to perform work takes the form ofelastic potential energy. Figure 1.13 shows that the work (i.e., area · force/area · distancecube moves) performed by the surrounding medium on a cube along the z − axis is givenby − ∫
(Pdxdy)dz, where the limits of integration are from the undeformed volume to thedeformed volume at some given time. This figure shows that, using equation 1.3 and 1.2and κ = c2ρ, the expression for instantaneous potential energy density is given by
PE = P 2/(2ρc2). (1.37)
Therefore the total instantaneous energy density of an acoustic wave propagating along thex-axis in a homogeneous medium is given by
ε = ∆E/V = 1/2ρ[u2 + P 2/(ρc2)], (1.38)
where the kinetic energy is given by the second to the last term and the potential energy isgiven by the last term. For a harmonic plane wave ρc = P/u this equation becomes:
ε = ρu2. (1.39)
As one might expect, it takes more energy to move denser rock with the same particlevelocity as moving lighter rock.

18 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
V2
ϑ
ϑ ’
1V
V3
V4
Linear Increasing Velocity V(z) Medium
V(z+dz) > V(z)
dz
sin ϑ = sin ϑ ’V3 V4
Figure 1.12: Downgoing rays bend across an interface towards the horizontal if the velocityincreases with depth. For a medium where c(z) = a + bz, all downgoing rays eventuallybend back towards the surface.

1.8. GEOMETRICAL SPREADING AND ATTENUATION OF PROPAGATING ACOUSTIC WAVES19
dxdy
dz c2ρ
c2ρ c2ρ
Instantaneous Potential Energy Density
dV = - V dP
Hooke’s Law
P dx dy ]dz = - P dV = V P dP = 1/2 P V-
undeformed
deformed
[
undeformed
deformed
2
Figure 1.13: The potential energy of a cube of deformed material along the z-axis.
1.8 Geometrical Spreading and Attenuation of PropagatingAcoustic Waves
It is of interest to examine the solution to the wave equation when the source term on theright hand side of equation 1.14 is a point source:
∇2G(x, t|x′, t′)− 1c2∂2G(x, t|x′, t′)
∂t2= −δ(x− x′)δ(t− t′), (1.40)
where δ(x − x′) is a Dirac delta function that is infinite when the the argument is zero(i.e., x = x′) and zero otherwise. This says that the source is localized to the point x′ andonly is excited when the source initiation time t′ is equal to the observation time t. TheG(x, t|x′, t′) is known as the impulsive point source response of the medium, also knownas the Green’s function. The spatial and temporal variables to the right of the verticalbar denote the spatial location and temporal excitation time of the point source and thevariables to the left of the vertical bar denote the receiver variables.
The property of the delta function is that it picks out the value of a function at the timet and location x. For example, let f(x, t) be a smooth finite-valued function, so that if weintegrate the product f(x, t)δ(x− x′)δ(t− t′) then
f(x′, t′) =∫ ∞
−∞
∫ ∞
−∞f(x, t)δ(x, t)dxdt. (1.41)
This ability to evaluate f(x, t) at the variables x′ and t′ is known as the sifting property.

20 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
Point Source response G(x,t|x’,0)
x’
t=1 t=2 t=3
x’
Figure 1.14: Expanding spherical wave fronts for a point source in a homogeneous medium.
Often we will assume an initiation time of t′ = 0, so that a solution to the above equationfor a homogeneous medium with velocity c is given as (Aki and Richards, 1980)
G(x, t|x′, 0) = −ei(k|x−x′|−ωt)
4π|x− x′| (1.42)
where 1/|x− x′| = 1/r is the geometrical spreading factor. Note, the numerator is just likeour plane wave solution, except the wavefronts of constant value form concentric spherescentered about the source point at x′ as shown in Figure 1.14. As time increases the spheresincrease in radius at the propagation speed c, where k = ω/c. The amount of energy Eon this sphere remains constant but the energy density is E/A = E/r2. From the previoussection, the amplitude of the wave is proportional to the square root of the energy densityso the amplitude should fall off as 1/r from the source point. This is exactly the behaviordescribed by equation 1.42. The 1/r is known as the geometrical spreading factor and is acharacteristic of body waves propagating in three dimensions. As time increases, the radiusof the outwardly propagating sphere increases so that the area of the sphere increases asNote the weakening of amplitudes in the the shot gather of Figure 1.15.
As a seismic wave deforms the rock, elastic energy is lost to frictional forces within therock as the rock is squeezed many times per second. The result is that the seismic amplitude

1.8. GEOMETRICAL SPREADING AND ATTENUATION OF PROPAGATING ACOUSTIC WAVES21
Saudi Arabia Shot Gather0.0
2.0
Tim
e (s
)
Surface Waves
Refraction
PPReflections
3.60.0 X (km)
Figure 1.15: Shot gather from Saudi Arabia. Note the weakening of amplitudes with in-creasing time.

22 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
Depth (km) 700
Q vs Depth
0
600
0
Figure 1.16: Different Q vs depth curves obtained from earthquakes.
diminishes with distance from the source as energy is lost to the earth by ”frictional forces”.as they dissipate the energy of the seismic wave. An extra term can be incorporated to theGreen’s function in equation 1.42 to account for attenuation:
G(x, t|x′, 0) = −e(ikr−iωt)e−ωr/(2cQ)
4πr, (1.43)
where Q is the positive attenuation factor that accounts for frictional losses in the rockand c is the local velocity. Note, the amplitudes will more rapidly attenuate with smallervalues of Q and increasing distances from the source. Typical Q values for tight granitesare greater than 200 while for young Miocene sedimentary rock in the Gulf of Mexico theQ values range from 5 to 100 or so. Sometimes Q is absorbed into the wavenumber k tomake it a complex valued function (Aki and Richards, 1980), i.e., k → k + i|k|/Q. A plotof the Q vs depth from the earth’s surface is given in Figure 1.16.
1.9 Wave Fronts and Rays
A wave front is defined as the contiguous points in model space that have the same phasefor a fixed time. In the case of a propagating plane wave these points fall along a plane

1.9. WAVE FRONTS AND RAYS 23
T2T 3T
Curved Wavefronts
T
2T3T
in a Homogeneous Medium Plane Wavefronts
in a Heterogeneous Medium
Figure 1.17: Wavefronts and rays (arrows) for a planar wavefront and a non-planar wave-front at times T, 2T and 3T .
with a normal perpendicular to the direction of propagation. The ray is defined to be theline that is perpendicular to the wavefront. For example, the ray associated with the planewave is a straight line as shown in Figure 1.17. For a heterogeneous medium the rays thatstart out from the source point follow a curved trajectory, that also honors Snell’s law.
In general, the Green’s function in a heterogeneous medium asymptotically can be rep-resented by the harmonic formula
G(x, t|x′, 0) = −A(x|x′)eiωτxx′ , (1.44)
where τxx′ represents the time1 to go from x′ to x along the curved ray trajectory, andA(x|x′) is the generalized geometrical spreading term. This Green’s function is valid whenthe wavelength λ = ω/c of the local wavefront is at least 3 times shorter than the variationwavelength of the velocity fluctuation. Here, c is the local velocity of the medium andthis assumption is also called a high-frequency approximation valid for sufficiently smoothmedium. In this case the orientation of the ray must be perpendicular to the constanttraveltime wavefront, i.e., it is parallel to the gradient of the traveltime function τxx′ :
∇τxx′ || ray direction, (1.45)
In fact the direction cosines of the ray are given by
ni =1
|∂τxx′/∂xi|∂τxx′
∂xi. (1.46)
1This is not the symbol for the stress tensor.

24 CHAPTER 1. PHYSICS OF ACOUSTIC WAVE PROPAGATION
and the equations for the ray are given by
dx1
∂τxx′/∂x1=
dx2
∂τxx′/∂x2=
dx3
∂τxx′/∂x3. (1.47)
These equations can be used to trace rays in a heterogeneous medium, and details forestimating the rays and traveltimes will be discussed in the chapter on the eikonal equation.
1.10 Summary
The basic physics of acoustic wave propagation are described. Plane wave solutions tothe wave equation are derived for a homogeneous medium, and the concepts of frequencyand wavelength were discussed for both 1D and 2D. Snell’s law resulted from imposingboundary conditions across an acoustic interface. For a two-layered medium, the reflectionand transmission coefficients are derived and showed that a low to high impedance contrastlead to positive reflection coefficients for the incident pressure field. It is noted that thereflection coefficient varies as a function of incidence angles, which leads to the conceptof AVO (amplitude vs offset) characterization of lithology. Impedance is defined as ρc fornormal incidence plane waves and is equal to the ratio of the pressure to particle velocity.It is a measure of rock stiffness, with large impedances corresponding to small particlevelocities that generate large pressures.
The energy of a propagating wave is the sum of the kinetic and potential energies.For a plane wave in a homogeneous medium propagating in the x direction, this energyis given as ρu2. There are two reasons for amplitude decay in a propagating sphericalwave: geometrical spreading and intrinsic rock attenuation. The latter is also seen in planewaves but there is no geometrical spreading in plane waves. However, plane waves withoutgeometrical spreading is a mathematical idealization and not physically possible in practice.

Bibliography
[1] Aki, K., and Richards, P., 1980, Quantitative seismology: Theory and Methods: Free-man Co., NY, NY.
[2] Kinsler, L. and Frey, A., 1961, Fundamentals of Acoustics, . ley and Sons, NY, NY.
1.11 Problems
1. Identify the direct arrival, air wave, surface waves, refraction arrivals, and reflectionarrivals in the CSG shown in Figure 1.18. Estimate the apparent velocity in thex-direction Vx and the associated period for each event. From these calculationsdetermine the wavelengths. Show work.
2. Which arrivals have the same apparent velocity as the actual propagation velocity ofthat event? Why?
3. The 1-D SH wave equation is the same form as the 1-D acoustic wave equation, exceptc becomes the shear wave velocity, P becomes the y-component of displacement v,c=sqrt(mu/rho) where mu is the shear modulus, and the SH wave equation is
1/c2∂2v/∂t2 − ∂2v/∂z2 = 0 (1.48)
SH (or shear horizontal) refers to the fact that the shear wave particle motion isperpendicular to the direction of particle motion, and is along the horizontal direction(in and out of plane of paper). The SH continuity conditions at the interface at z=0are a). Continuity of y-displacement v+ = v−., b). Continuity of shear traction:µ∂v/∂z+ = µ∂v/∂z−, where µ is the shear modulus.
Derive the y-displacement reflection and transmission coefficients for a plane SH wavenormally incident on a planar interface in an elastic medium.
25

26 BIBLIOGRAPHY
Figure 1.18: Shot gather from salt lake valley. The trace interval is 5 feet along the horizontalaxis and the time units along the vertical axis are seconds.

Chapter 2
Physics of Elastic Wave Propagation
We now introduce the equations of motion for a rock that has non-zero shear strength,i.e., it resists a twisting motion. This is an elastic rock, which is more representative ofwaves propagating through the earth compared to the acoustic approximation of Chap-ter 1. The most significant difference is that elastic wave propagation consists of a newtype of wave, namely the shear or S wave (see Figure 2.1). Other wave types are nowpossible, including ground roll which consists of surface waves such as Rayleigh wavesand Love waves. The shear wave is a body wave characterized by particle motion per-pendicular to the wave propagation direction and has a propagation velocity that is halfor less than that of the P wave. Other new modes include the surface Rayleigh wave,which is a strong source of noise in exploration records. See the movie (http://www.ndt-
ed.org/EducationResources/CommunityCollege/Ultrasonics/Physics/wavepropagation.htm) of particle motion for a prop-agating shear wave. Although most of our treatment of exploration seismology will assumethe acoustic approximation, we will need to acknowledge the underlying physics of elasticwave propagation when dealing with surface waves and shear waves in our data.
2.1 Elastic Strain and Stress
If the medium has non-zero shear strength then there can be shear strains supported bythe rock. This means that the shape of a cube can be distorted into a, e.g., trapezoidal-like shape after application of a shear stress on the cube. Unlike an acoustic cube where,e.g., water molecules do not resist sliding past one another, an elastic cube will resist theshearing of it into a trapezoidal shape so it has shear strength. Similar to acoustic rocks,increasing strength of an elastic rock will lead to an increase in the shear velocity speed.We now describe the general theory of stress and strain for an elastic rock, which can beused to derive the elastodynamic equations of motion.
2.1.1 Simple and Pure Shear Strain
It is important to establish the physical meaning of shear strain compared to compressionalstrain. As discussed in Chapter 1, compressional strain changes the volume of the acousticcube. This volume change can be estimated by drawing two perpendicular lines within thecube and comparing the change in area (or volume for a 3D deformation) after deformation,as shown in Figure 2.2a. If the angles between the two perpendicular lines change then it islikely that simple shear strain is involved, as shown in Figure 2.2b. If the area (or volume
27

28 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
P−Wave vs S−Particle Motion
PropagationDirection
particle motion
P wave
S wave
ParticlesResting
particle motion
particle motion
Simple Strain
Figure 2.1: Snapshots of particle motions for (top) P and (bottom) S waves, which areparallel and perpendicular, respectively, to the direction of wave propagation from left toright.

2.1. ELASTIC STRAIN AND STRESS 29
in 3D) does not change but the angles do change as illustrated in Figure 2.2c, then this isdenoted as pure shear strain.
To quantify the measure of shear strain we can define the end point vectors of twopoints (small filled circle and square) of a box as r and r + dz in Figure 2.3a. After sheardeformation, these two points have been displaced by the respective displacement vectorsu(r) and u(r + dz) shown in Figure 2.3b. The displacement vector u has components in3D as u = (u, v, w), but often we will use the index notation ui where u1 = u, u2 = v, andu3 = w.
To reduce notational clutter we simplify the Figure 2.3b diagram to that in Figure 2.3c,and see that the deformation vector du(r + dz) represents the change of the line’s endpoint (small filled box) location relative to the beginning point (small filled circle). In thisexample, the ratio du/dz is equal to the tangent of the deformation angle θ, and will increasewith increasing shear forces that deform the box. This measure du/dz of shear deformationis defined as the shear strain, and is unitless just like the compressional (or longitudinal)strain defined in Chapter 1. Similar to Hooke’s law that linearly related the compressionalforce that changed the volume of a box, experiments show that that the shear forces canbe linearly related to the shear strains as
τxz = µdv/dz, (2.1)
as long as the infinitesimal strain limit is satisfied dv/dz < 10−5. Here, τxz is known as thesimple shear stress component and has units of force/unit area. The ratio (shear stress)/(shear strain) = µ is known as the shear modulus, with stiffer rocks having larger valuesof µ. For now we will naively define τxz as the z-component of deformational force the outermedia acts on the cube along the face normal to the x-axis.
2.1.2 S Waves Shear Rocks
But what does shear strain have to do with the propagation of S waves seen in Figure 2.1?Figure 2.4 depicts the deformations of boxes associated with a snapshot of propagating Pand S waves. Obviously the P waves only change the volume of the boxes while the S wavechanges both volume and the angle between two perpendicular lines. Therefore we concludethat shear waves must be strongly associated with shear stains while compressional wavesare associated with dilatational strains (i.e., volume changing). The next section describeshow to quantify the stress-strain relationship in an elastic medium.
2.1.3 Stress Tensor
Equation 2.1 loosely defined the shear stress as proportional to the shear strain, and it hasunits of force/area. The generalization of this concept is needed because the deformationalforces acting on a planar area depends on the orientation of the plane. For example, thebuilding in Figure 2.5 has a large compressional stress τzz on the horizontal plane at thesolid circle. But if we rotate this plane by 90o to the vertical (at the solid circle) thereare negligible shear and compressional forces τxz = τxx = 0 acting on this vertical plane.This seems strange, the body force at a point remains the same yet the deformation forcesdepend on the orientation of the plane.

30 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
Original Volume Change Volume
Simple Shear Strain =
Original Length Deformation
= Tan Θ
90o
90o
Deform
a). Compressional Strain
Deform
b). Simple Shear
Compressional Strain =
Deformation
Length Original
Θ
c). Pure Shear
Deform90+Θ
90−Θ
Pure Shear Strain
Angles ChangeArea Unchanged
Figure 2.2: Box (left) before and (right) after deformation. Pure shear changes anglebetween two perpendicular lines but does not change the area of the box.

2.1. ELASTIC STRAIN AND STRESS 31
x
z
x
z
dzdu = tanϑ
dz
dxr u(r)+r
simplify
ϑ
r+dz
}
u(r+dz)+r+dz
dz
}du(r+dz)
deformshear
a). Box b). Sheared Boxdu(r+dz)=u(r+dz)−u(r)
c). Simplified
Figure 2.3: a). Undeformed box, b). deformed box after applying a simple strain, and c).deformed box after simplification of notation. The displacement vector u(r) is defined asthe vector that connects the particle at r (in the undeformed state) with the same particleafter deformation.

32 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
P Wavez
y
x
S Wave
x
y
zParticle Motion
Particle Motion
Figure 2.4: Snapshots of particle motions for (top) P and (bottom) S waves, which areparallel and perpendicular, respectively, to the direction of wave propagation. The heightof the sinusoidal curve above the x axis represents the amplitude of particle motion.

2.1. ELASTIC STRAIN AND STRESS 33
−j
i
zzyz
yyxy zy
x
z orientation planesy
xz xx
zzT >> 0
T = T = 0
k
T(−j) = −iT − jT − kT
T(k) = iT + jT + kT zx
xx xyT(i) = iT + jT + kT
xz
Figure 2.5: Building where the deformation forces depend on the orientation of the planelocated at the solid circle. The enlarged infinitesimal cube on the right defines the compo-nents of the traction vector as the stress tensor components. For example, τij is the jthcomponent of the traction vector on the face perpendicular to the ith coordinate axis.
To mathematically describe these deformation forces, an infinitesimally small 3D cubecan be extracted from the building as shown and the traction vector T(n) is defined to bethe force per unit area exerted by the exterior media (i.e., the contiguous material that liesjust outside the small cube) on a plane with normal n. The normal points to this source ofthe exterior force. If this plane is perpendicular to the ith unit vector then the x, y and ztraction components are the stresses τix, τiy, and τiz:
T(ni) = τixi + τiy j + τizk, (2.2)
where ni represents the unit vector along the ith coordinate axis (e.g., n1 = i). If thecube is in static equilibrium then it makes sense that the sum of the components on the sixfaces of the cube are zero. As the opposite faces with normals parallel to k become closerthis implies that the τ+
zz component on the top face is equal and opposite to τ−zz along thebottom face. It also says that the τ+
zx component on the top face is equal and opposite toτ−zx along the bottom face. To prevent rotation of the cube then the shear stress tensorsmust be symmetrical so that τxz = τzx, as shown in Figure 2.6.
The symmetry argument above was based on a cube in static equilibrium. The sameargument can be used for a cube dynamically deformed by a passing wave by noting thatthe cube’s inertial component of force dx3ρu along the x direction can be equated to thenet sum of the deformational forces dx2(τ+
xx − τ−xx + τ+xy − τ−xy + τ+
xz − τ−xz). As dx→ 0 theinertial force terms shrinks to zero faster (i.e., cubically in dx), compared to the tractionterms (i.e., they shrink to zero quadratically in dx). Therefore for small enough dx, we canset the deformational force components to zero, i.e., τ+
xx − τ−xx + τ+xy − τ−xy + τ+
xz − τ−xz = 0.This condition is equivalent to the static equilibrium condition that the sum of traction

34 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
T = T zx xz
x
zy
T = T zy yz
Symmetry of Shear Tensors Imply no Rotation
Figure 2.6: No rotation implies symmetry of shear stresses, e.g., τxz = τzx.
components on a cube is equal to zero.We call τij a tensor because it is invariant under a coordinate transformation; this
means that the deformation forces on any one face are independent of the orientation of themathematical coordinate system.
2.1.4 Stress and Strain Definitions
We now borrow some intuitive definitions of strain and stress from Steven Dutch’s WWWpage (http://www.uwgb.edu/DutchS/structge/strsparm.htm). This will help us make theconnection between the familiar geological definitions of stress and strain and the geophysi-cist’s definitions.
• Stress is defined as force per unit area. It has the same units as pressure, and infact pressure is one special variety of stress. However, stress is a much more complexquantity than pressure because it varies both with direction and with the surface itacts on.
• Compression. Stress that acts to shorten an object.
• Tension. Stress that acts to lengthen an object.
• Normal Stress. Stress that acts perpendicular to a surface. Can be either compres-sional or tensional.

2.1. ELASTIC STRAIN AND STRESS 35
• Shear Stress that acts parallel to a surface. It can cause one object to slide overanother. It also tends to deform originally rectangular objects into parallelograms.The most general definition is that shear acts to change the angles in an object.
• Hydrostatic Stress (usually compressional) that is uniform in all directions. Ascuba diver experiences hydrostatic stress. Stress in the earth is nearly hydrostatic.The term for uniform stress in the earth is lithostatic.
• Directed Stress. Stress that varies with direction. Stress under a stone slab isdirected; there is a force in one direction but no counteracting forces perpendicularto it. This is why a person under a thick slab gets squashed but a scuba diver underthe same pressure doesn’t. The scuba diver feels the same force in all directions.
• Traction. Vector of force acting per unit area across an internal interface. It quan-tifies the contact force between particles along one side of the plane acting on theparticles on the other side.
In geology we never see stress. We only see the results of stress as it deforms materials.Even if we were to use a strain gauge to measure in-situ stress in the rocks, we would notmeasure the stress itself. We would measure the deformation of the strain gauge (that’swhy it’s called a ”strain gauge”) and use that to infer the stress.
Strain is defined as the amount of deformation an object experiences compared to itsoriginal size and shape. For example, if a block 10 cm on a side is deformed so that itbecomes 9 cm long, the strain is (10-9)/10 or 0.1 (sometimes expressed in percent, in thiscase 10 percent.) Note that strain is dimensionless.
• Longitudinal or Linear Strain. Strain that changes the length of a line withoutchanging its direction. Can be either compressional or tensional.
• Compression strain. Longitudinal strain that shortens an object.
• Tension. Longitudinal strain that lengthens an object.
• Shear Strain that changes the angles of an object. Shear causes lines to rotate.
• Infinitesimal Strain. Strain that is tiny, a few fraction of a percent or less. Allows anumber of useful mathematical simplifications and approximations. All acoustic andelastodynamic equations of motion in this book assume infinitesimal approximationsto linearize the relation between stress and strain.
• Finite Strain. Strain larger than a few percent. Requires a more complicatedmathematical treatment than infinitesimal strain.
• Homogeneous Strain. Uniform strain. Straight lines in the original object remainstraight. Parallel lines remain parallel. Circles deform to ellipses. Note that thisdefinition rules out folding, since an originally straight layer has to remain straight.
• Inhomogeneous Strain. How real geology behaves. Deformation varies from placeto place. Lines may bend and do not necessarily remain parallel.

36 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
2.1.5 Strain Tensor
The stress tensor was introduced in the previous section, so it is time to introduce thegeneralized definition of the strain tensor. The starting point is to recognize that thecomponents of the net deformation vector du(r+dr) (for the line segment with end pointsat r and r + dr) can be expanded in a Taylor series about the particle at r:
du(r + dr)i = u(r + dr)i − u(r)i =3∑
j=1
∂ui
∂xjdxj +O(dx2), (2.3)
where higher-order terms in dxj are neglected under the infinitesimal approximation. Theabove equation can be rearranged into strain and rigid rotation terms to give
du(r + dr)i = 1/23∑
j=1
strain tensor︷ ︸︸ ︷(∂ui
∂xj+∂uj
∂xi) dxj + 1/2
3∑
j=1
rigid rotation︷ ︸︸ ︷(∂ui
∂xj− ∂uj
∂xi) dxj , (2.4)
where it can easily be shown that the rigid rotation term corresponds to ∇× u× dx. Therigid rotation term can be neglected assuming infinitesimal strains that do not undergorotations (Aki and Richards, 1980).
The definition of the curl ∇u in terms of a line integral is given in Figure 2.7.The notation for the shear strain is εij = 1/2(∂ui/∂xj + ∂uj/∂xi), which says that
a shear strain exists if there is a non-zero gradient of displacement that is perpendicularto the direction of displacement. We can also use Einstein index notation so that εij =1/2(ui,j + uj,i), where the index following a comma indicates a partial derivative withrespect to that index’s coordinate and common index symbols in a term imply summationover the values of the index, i.e., equation 2.4 reduces to
du(r + dr)i = 1/2(∂ui
∂xj+∂uj
∂xi)dxj ,
= εijdxj , (2.5)
where the rigid rotation term is assumed to be zero and the strain tensor is defined to beεij = 1/2( ∂ui
∂xj+ ∂uj
∂xi). It is interpreted as the change of the ith component of the deformation
vector du(r + dr) with respect to the derivative along the jth coordinate.The term εii = 1/2(∂u1/∂x1 +∂u2/∂x2 +∂u3/∂x3) is proportional to the volume change
of the deformed cube, as discussed in Chapter 1. Therefore, εii is denoted as the dilatationalstrain tensor and plays an important role in describing compressional wave propagation. Onthe other hand, the strain tensor εij = 1/2(∂ui/∂xj + ∂uj/∂xi) accounts for shear strainswhen i 6= j. See Figure 2.3 for the case when i = 1 and j = 3 so that ε13 = 1/2∂u/∂z.
2.2 Generalized Hooke’s law
Laboratory experiments can establish the linear relationship between the stress on an elasticrock and its resulting deformation. These experiments might confine a block of rock andpress forward in the z direction, measuring the longitudinal deformation in the z (i.e.,∂w/∂z)

2.2. GENERALIZED HOOKE’S LAW 37
kA 0
U = lim U dA
|V|V 0
net flux out of box
U dA = 0
zero flux out of box
what goes in goes out
DIVERGENCE = area integral
|A|
CURL
components || to sides of box
U always has positive
paddle wheel rotates
= line integral
dS is || to sides of box
paddle wheel does not rotate
U dS >> 0
U dS=0
U dS
U is to sides of box
U dA>>> 0
U is to sides of box
dA is to sides of cube
U = lim x
Figure 2.7: Definitions of curl ∇u× k as the limit of a line integral and the divergence ∇·uas an area integral. Here, k is the unit vector pointing out of the page and the line integralcircles counterclockwise around the box. The area integral is along the surface of the cubeon the right. If the box in the left panel is undergoing pure rotation then the projectionof the vector u on the sides of the box, i.e., u · ds, will always be positive, leading to alarge value of curl. If the vector u represents the vector of water velocity flow then largepositive curl means fast counterclockwise rotation of a paddle wheel placed in the middleof the box. In contrast, if the velocity field u has zero projection onto the surface then thecurl is zero and the paddle wheel does not turn, as shown in the middle diagram in the leftpanel. Divergence is only non-zero if there is a net water flow in or out of the cube, i.e., thenet projection of velocity vector onto the normals is non-zero as shown in the right panel.

38 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
and have constraints so that the lateral directions are not deformed. Another experimentmight allow for deformation of the rock in the x-direction responding to a downward normalstress on the horizontal face. Since there are 9 different strains and 9 different types ofstresses, then there will 9x9 = 81 proportionality constants to determine. Therefore, thegeneralized Hooke’s law is given by
τij = cijklεij , (2.6)
where cijkl constitute 81 parameters and are called elastic constants. Fortunately, symme-tries (Aki and Richards, 1980) in the stress (i.e., τij = τji) and strain tensors (i.e., εij = εji)and conservation considerations reduce the number of unknowns from 81 to 21 independentconstants. In the acoustic case these constants reduce to one independent constant knownas the bulk modulus.
For an elastic isotropic material, there are only two independent elastic constants (Akiand Richards, 1980):
τij = λδijεkk + 2µεij , (2.7)
where τij is the stress tensor that denotes the force/area imposed by the outside medium inthe ith direction along the face with normal j. Also, µ is the shear modulus and λ is Lame’sconstant. Appendix 1 provides a listing of elastic stiffness coefficients and their relationshipto one another.
2.3 Elastic Wave Equation
We now discuss the case where a transient source is excited in an elastic medium to generateelastic waves. Similar to the acoustic case, the elastic form of Newton’s law can be foundby summing the body and deformation forces within a small cube and equating the resultto the inertial forces. That is, Newton’s law is given by
ρui = ∂τi1/∂x1 + ∂τi2/∂x2 + ∂τi3/∂x3 + fi = τij,j + fi, (2.8)
where Einstein notation says that repeated indices indicate summation over all three com-ponents. Here, fi is the ith component of the body force vector.
Inserting equation 2.7 into equation 2.8 gives the elastic wave equation in terms of strainsfor a homogeneous medium:
ρui = λ∂ekk
∂xjδij + 2µ
∂εij∂xj
. (2.9)
But εkk = ∂uk/∂xk = ∇·u and εij = 1/2(∂ui/∂xj+∂uj/∂xi) so the above equation becomes
ρui = λ∂∇ · u∂xi
+ µ∂
∂xj(∂ui
∂xj+∂uj
∂xi),
= λ∂∇ · u∂xi
+ µ[∇ · ∇(ui) +∂∇ · u∂xi
],
= (λ+ µ)∂∇ · u∂xi
+ µ∇ · ∇(ui), (2.10)

2.3. ELASTIC WAVE EQUATION 39
or in vector notation we have the vectorial wave equation
ρu = (λ+ µ)∇(∇ · u) + µ∇ · ∇u. (2.11)
The above partial differential equations is tedious to use when a boundary value problemneeds to be solved, such as finding the reflection coefficients in a layered medium. It is mucheasier to solve these types of problems when the governing equation of motion is a simplescalar equation, as demonstrated in Chapter 1 with the acoustic wave equation in terms ofthe pressure field. Fortunately, for a homogeneous medium, the elastic wave equation 2.11can be transformed into two simpler equations by equating the vector field u into a sum ofpotentials:
u = ∇φ+∇× ψ, (2.12)
where φ is a scalar potential and ψ is a vector potential. We have an extra degree ofconstraint we need because we are equating a 3-component vector u into an expression with4 unknowns. The extra constraint that will be useful is that ∇ · ψ = 0.
Plugging this expression for u∇φ+∇× ψ into equation 2.11 yields
ρ(∇φ+∇× ψ) = (λ+ µ)∇(∇ · [∇φ+∇× ψ]) + µ∇ · ∇[∇φ+∇× ψ]. (2.13)
We know that ∇ · ∇ × ψ = 0 so the above expression becomes
ρ(∇φ+∇× ψ) = (λ+ µ)∇[∇2φ] + µ∇2[∇φ+∇× ψ]. (2.14)
We can separate the φ terms from the ψ terms by multiplying both sides of the aboveequation by ∇·, recalling the constraint ∇ · ψ, and noting the commutative property of ∇2
when applied to a ∇ or ∇× operation:
ρ∇2φ = (λ+ µ)∇2[∇2φ] + µ∇2∇2φ. (2.15)
Rearranging gives
∇2[ρφ− (λ+ 2µ)∇2φ] = 0, (2.16)
which implies
ρφ− (λ+ 2µ)∇2φ = 0. (2.17)
This last expression is the wave equation for the scalar potential. Similar to the acousticwave equation in Chapter 1, it is satisfied by plane waves that propagate with velocitycp =
√(λ+ 2µ)/ρ.
The wave equation for the vector potential can be derived in a similar manner exceptwe multiply equation 2.14 by ∇× (remembering the identity ∇×∇φ = 0) to give
ρψ − µ∇2ψ = 0. (2.18)
and the shear velocity is given by cs =√µ/ρ.
In summary, we have the wave equations for the scalar and vector potentials
φ = c2p∇2φ; ψ = c2s∇2ψ, (2.19)
where we use the identities ∇·∇×ψ = 0, ∇×∇φ = 0, and ∇2ψ = ∇(∇·ψ)−∇× (∇×ψ).These potential equations are much more simple compared to the elastic wave equation,and can be used to more easily solve for boundary value problems.

40 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
2.4 P, PSV, and SH Waves
We can examine a plane wave solution to the elastic wave equation and deduce that there canbe three types of waves in an elastic medium: P, SV, and SH waves. The SV and SH wavesare shear waves with particle motion perpendicular to the direction of wave propagation,and P waves have particle motion parallel to the direction of wave propagation.
The starting point in the derivation is to recall the Chapter 1 expression for a propa-gating plane wave u = ei(k·x−ωt)s in a homogeneous medium, except we now include theparticle displacement vector s. Here, k is the wavenumber vector that points in the directionof propagation. For a homogeneous medium and plane wave, the s particle motion vectoris parallel to a fixed line and describes the motion of the medium’s particles affected by thepassing wave. Plugging this plane-wave expression into the vector wave equation 2.11 weget
ρω2s− (λ+ µ)(s · k)k− µk2s = 0. (2.20)
Applying the dot product of the above equation with s gives
ρω2|s|2 − (λ+ µ)(s · k)2 − µk2|s|2 = 0, (2.21)
which is a quadratic equation in |s| with two solutions. One of the solutions is found bysetting the particle motion to be perpendicular to the propagation direction s ·k = 0, whichreduces the above equation to the dispersion equation for S waves:
ω/k =√µ/ρ = cs. (2.22)
We can also choose the particle motion vector s to be parallel to the wave propagationvector k so that s || k. This gives us the dispersion equation for P waves:
ω/k =√
(λ+ 2µ)/ρ = cp. (2.23)
The above analysis says that S waves propagate perpendicular to the particle motion in ahomogeneous medium while the particle motion is parallel to the propagation direction forP waves. Comparing equation 2.23 to equation 2.22 says that the cp > cs, and in practicethe P-wave velocity is about twice or more faster than the S-wave velocity. For a layeredmedium, there can be two types of S waves, SV waves where the particle motion is parallelto to the vertical plane and SH waves where the particle motion is parallel to the horizontalplane. For a layered medium, the SH can get trapped between the free surface and a layerinterface that seperates a low-velocity layer from its faster layer underneath it. The motiondiagram for Love waves is shown in Figure 2.8.
If a plane wave is propagating parallel to the plane of this page in a layered mediumwith horizontal interfaces, then SH waves will honor the scalar wave equation
ψy = c2s∇2ψy, (2.24)
in each layer with shear velocity cs. In contrast, the associated PSV plane waves will honorthe equations
ψx = c2s∇2ψx; ψz = c2s∇2ψz, (2.25)
where the y−coordinate axis is perpendicular to this page.

2.5. REFLECTION COEFFICIENT AT THE FREE SURFACE 41
Figure 2.8: Love wave particle motion.
2.5 Reflection Coefficient at the Free Surface
The reflection coefficients will now be derived for a plane P wave incident from below onthe free surface in Figure 2.9a. Here we assume the particle motion of the plane P wave tobe restricted to be along the vertical plane. There are two reflected waves in Figure 2.9a, aPP and a SV wave. The SV wave is needed in order to satisfy the equations of constraintat the free surface, namely that τzz = 0, τzx = 0 at z = 0 along the free surface. Twoequations of constraint mean that there must be two unknowns, the reflection coefficientsPP and PS. Here, symmetry considerations say that only a PP wave and a SV wave arereflected from the surface and not a SH wave which has particle motion in and out of thepage and no component along the vertical plane.
The starting point for deriving the unknown reflection coefficients PP and PS in Fig-ure 2.9a is to write the total traction components as
T = (τzx, τzy, τzz), (2.26)
where τzy = 0 because there is no PSV particle motion along the y axis, so there is no strainεyz; no strain means no shear stress τzy = 0.
1. The next step is to write the stress components in terms of the P-wave displacementu in equation 2.7, and then rewrite the displacements in terms of potentials (i.e.,(u, 0, w) = (∂φ/∂x, 0, ∂φ/∂z) in equation 2.12 to get the traction components in termsof the P-wave potential:
TP = (2µ∂2φ/∂z∂x, 0, λ∇2φ+ 2µ∂2φ/∂z2). (2.27)
2. Similarly the stress components ( where (u, 0, w) = (−∂ψ/∂z, 0, ∂ψ/∂x)) for the SVwave are given as
TSV = (µ(∂2ψ/∂x2 − ∂2ψ/∂z2), 0, 2µ∂2ψ/∂z∂x). (2.28)

42 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
P
PS
free surface
a). Free surface b). Two−layer medium
2 unknowns4 unknowns
PP
’
P
PS’
PPPS
PP’
Figure 2.9: Plane wave impinging upon a horizontal interface at the a). free surface and b).along a 2-layer interface.The double-sided arrows indicate the direction of particle motion.
3. The plane wave forms for the total potential wavefields is given as
φ =
incident P−wave︷ ︸︸ ︷ei(kxx+kzz) +
reflected PP−wave︷ ︸︸ ︷PPei(kxx−kzz) ,
ψ =
reflected PS−wave︷ ︸︸ ︷PSei(κxx−κzz) , (2.29)
where κ is the wavenumber vector for the PS wave. The unknowns we wish to solvefor are the reflection coefficients PP and PS. To solve for two unknowns we need twolinear equations of constraint.
4. The boundary conditions at the free surface
TP + TS = (0, 0, 0), (2.30)
provide two non-trivial equations of constraint. Plugging equations 2.27-2.29 intoequation 2.30 gives two linear equations with the two unknowns PP and PS. Theseunknowns can be solved for to give the free-surface reflection coefficients (Aki andRichards, 1980; Udias, 1999):
PP =4β4p2cos(i)cos(j)/(αβ)− (1− 2β2p2)2
4β4p2cos(i)cos(j)/(αβ) + (1− 2β2p2)2,
PS =−4β2pcos(i)(1− 2β2p2)/α
4β4p2cos(i)cos(j)/(αβ) + (1− 2β2p2)2, (2.31)
where α, β, and ρ indicate P-wave velocity, S-wave velocity and density respectively. Thep slowness vector is equal to k/ω; and the angles i and j correspond to the PP and PSreflection angles, respectively, measured with respect to the vertical axis.

2.6. REFLECTION COEFFICIENTS FOR A TWO-LAYER MEDIUM 43
2.6 Reflection Coefficients for a Two-Layer Medium
Figure 2.9b depicts a plane P wave impinging upon a horizontal elastic interface. Here,there are 4 different wave types to consider because reflected and transmitted convertedshear waves can be generated at the interface, as well as a reflected and transmitted Pwave. The shear waves have particle motion that is perpendicular to the propagationdirection while the compressional components are parallel to the direction of propagation.Imposing continuity of vertical and horizontal particle velocity and normal τzz and shearstress τzx tractions provide four equations of constraint. Similar to the acoustic case, wecan solve these four equations for the unknown amplitudes PP, PS, PS′, and PP ′. ThePP reflection coefficient is given in Aki and Richards (1980):
PP = [(bcos(i1)/α1 − ccos(i2)/α2)F − (a+ dcos(i1)cos(j2)/α1β2)Hp2]/D, (2.32)
where a, b, c, d,and D are constants defined in Aki and Richards (1980). The subscripts 1and 2 refer to the top and bottom layers respectively and j corresponds to the angle of theconverted S waves.
2.7 Rayleigh Waves at the Free Surface
For a SV plane wave incident on the free surface in Figure 2.10a, it produces reflected bodywaves SP and SS. The vertical wavenumber components of these reflected waves are givenas
kz =√ω2/α2 − k2
x; κz =√ω2/β2 − k2
x; (2.33)
where kx = sinθ/β and θ is the incidence angle of the SV wave measured with respect tothe vertical. Since α > β, there will be incidence angles where kx ≥ ω/α, which leads tovertical wavenumber components that are purely imaginary. This means that the SP planewave represented by φ = ei(kxx+kzz) = e(ikxx−|kz |z) will have a decaying component in thez direction and a propagating component in the horizontal x direction1. This is similar tothe case of refraction arrivals discussed in Chapter 1, except now the propagation is alongthe free surface. Working through this boundary value problem here in the same manneras the previous section shows this inhomogeneous wave to have unusual properties. It isknown as a Rayleigh wave and has the following characteristics.
1. The Rayleigh wave has retrograde ellipitical motion as shown in Figure 2.10b. Anactual recording is shown in Figure 2.11.
2. For a homogeneous medium it has a velocity about 0.9β.
3. Rayleigh waves spread along the planar free surface rather than a 3D medium, sothe attenuation due to geometrical spreading is not strong compared to body waves.Consequently, the surface waves have much stronger amplitudes than body waves asshown in Figure 2.13.
1If all the wavenumber components are real this type of wave is known as a body wave. If at least one ofthe wavenumber components is imaginary then this is known as an inhomogeneous or interface wave.

44 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
a). Incident SV Wave b). Critical Incidence
Body Waves
Body Waves
S
free surface
S
SS
SPSP
SS
Rayleigh Wave
Figure 2.10: At critical SV incidence angles, the converted SP wave in b). propagatesparallel to the free surface. This situation produces an inhomogeneous wave that decays indepth and only propagates along the lateral direction. For this example, the surface waveis a Rayleigh wave with retrograde ellipitcal particle motion.
4. Earthquakes deep in the earth are strong generators of surface waves because they areefficient in generating shear waves (faults tear or shear, not compress) along a faultplane. See Figure 2.12 for an illustration of 4 types of fauilts. Shallower earthquakesgenerate stronger shear waves.
5. The shear wave propagation velocity of Rayleigh waves is very sensitive to the shearvelocity distribution, but not the P-wave velocity distribution. Consequently they areinverted by seismologists for S wave distributions.
6. Rayleigh wave amplitudes decay exponentially with depth, and become insignificantdeeper than two wavelengths. Thus, low-period surface waves probe to deep depthsof about 1 or 2 wavelengths while high-frequency Rayleigh waves are only sensitive toshallow velocity structures.
2.8 AVO Effects
The variation of reflection and transmission coefficients with incident angle and thus offsetis commonly known as offset-dependent reflectivity. The Zoeppritz equations (1919) de-scribe the reflection and transmission coefficients as a function of incident angle and elasticmedia properties (density, P-wave velocity, and S-wave velocity), of which the PP Zoeppritzequation is given in equation 2.32. They apply to a reflection of plane-waves between twohalf-spaces, and do not include wavelet interferences due to layering. Furthermore, am-plitudes are a measure of the reflection coefficient only when effects that cause amplitudedistortions have been removed. Thus, preprocessing to remove transmission loss, sourceand receiver effects, spherical divergence, multiples, and so on, is essential to the successful

2.8. AVO EFFECTS 45
P SSurface Waves
Minute Mark
Figure 2.11: Actual seismogram showing the first arrival as the P wave and the secondaryarrival of the S wave followed almost immediately by the Rayleigh wave and other surface-related modes. Recall, surface waves have less geometrical spreading than body waves.
extension shortening
Figure 2.12: Four types of faults that are observed along the earth’s surface.

46 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
recovery of the reflection coefficients. The last 20 years has seen the practical use of AVOeffects as a direct hydrocarbon indicator.
An example of a a shot gather collected in Saudi Arabia is shown in Figure 2.13. Here,the surface waves (primarily Rayleigh waves) propagate much with a much slower apparentvelocity than do the reflected PP arrivals. The reflection events fall along a hyperbola curvein x − t space, and the first arrivals are refraction events. A reflecting event of interest isidentified (e.g., the events along the hyperbola with time intercept at approximately 1 s inFigure 2.13) and the amplitude of this event is picked and displayed as a function of offsetparameter x. For young sedimentary rocks such as Tertiary sands in the Gulf of Mexico, theamplitude vs offset (AVO) behavior can often distinguish brine-filled sands from gas sands(Ostrander, 1984). To simplify the analysis, an approximation based on small changes inelastic parameters is used to approximate equation 2.32.
2.8.1 Small Angle Approximation to Reflection Coefficients
A modified version of Ekert’s AVO report is given below.For a two layered medium separated by a horizontal interface the PP reflection coefficient
for small jumps in the medium parameters are given by
(C. Ekert, SEP Report http://sepwww.stanford.edu/public/docs/sep96/paper_html/node34.html)
R(θ) =1
2 cos2 θIp − 4γ2 sin2(θ)Is + (2γ2sin2θ − tan2 θ)D (2.34)
where
Ip = (∆vp/vp + ∆ρ/ρ); Is = (∆vs/vs + ∆ρ/ρ);D = ∆ρ/ρ; (2.35)
with
∆vp = vp2 − vp1;∆vs = vs2 − vs1;∆ρ = ρ2 − ρ1;vp = (vp2 + vp1)/2; vs = (vs2 + vs1)/2; ρs = (ρs2 + ρs1)/2; (2.36)
The first angle-dependent term in equation 2.34 significantly contributes for 0 < θ < 30degrees, while the second starts to significantly contribute for θ > 30 degrees. The term γ isthe background vs/vp estimate.
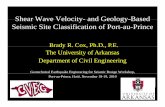
The reflectivity curves corresponding to either a unit perturbation in P-impedance con-trast (Ip = 1, Is = 0,D = 0), S-impedance contrast or density contrast can be seen inFigure 2.14. For a unit perturbation in relative P-impedance contrast, the P-impedanceinversion curve dominates at small angles of incidence and increases with increasing off-set. For a unit perturbation in relative S-impedance contrast, the S-impedance inversioncurve is zero at normal incidence and is increasingly negative with increasing offset. Overthe conventional range of surface reflection data acquisition geometry illumination, whichis typically 0
◦to 35
◦, the density inversion curve is not significant, as most of the density
contrast contributes to the reflection AVO through the impedance contrasts alone. As the re-flection amplitudes are mostly a combination of the P- and S-impedance contrast inversion

2.8. AVO EFFECTS 47
Saudi Arabia Shot Gather0.0
2.0
Tim
e (
s)
Surface Waves
Refraction
PPReflections
3.60.0 X (km)Figure 2.13: Shot gather from Saudi Arabia.

48 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
I p
I s
Theoretical Impedance Contrasts
Angle (degrees)0 50
1.2
−1.2
0.0
Refle
ctio
n A
mpl
itude
D
Figure 2.14: Theoretical P, S, and Density impedance inversion curves (from Ekert, SEP) .
curves, reflectors with P- and S-impedance contrasts of the same polarity and magnitudeare expected to show approximately constant amplitude versus offset. On the other hand,reflectors with P- and S-impedance contrasts of opposite polarities, indicating a transitionzone of changing rock pore fluid properties, should show increasing amplitudes versus offset.Reflectivity data can be inverted for changes in P- and S-impedance across an interface andtherefore for possible pore fluid transitions.
For θ < 30 degrees, geophysicists will use the small angle approximation to equation 2.34:
R(θ) ≈ A+B sin2 θ, (2.37)
and plot up crossplot curves (Foster et al., 1997) to assess geology. Shuey showed thatlinearization of the fluid factor (Shuey, 1985)
A = R0;B = 1/2∆vp/vptan2θ, (2.38)
where tan2 θ ≈ sin2 θ for small angles.For example, Figure 2.15 depicts the crossplot of A and B pairs taken from a well log.
These A and B pairs can be obtained by estimating the density and P- and S-wave velocitiesfrom the sonic log at each depth point, plug in these values into equation 2.34 to estimateR(θ) for a particular depth level, and find A and B from equation 2.37. The resulting A-Bplot shows a linear trend, and the idea is that any deviations from this trend representa significant change of geology such as oil or gas bearing rocks. The departures can beestimated by finding A and B pairs from the R(θ) vs θ curves estimated from the seismicreflection amplitudes along a horizon of interest.

2.9. PRACTICAL ASPECTS OF AVO. 49
In detail, AVO analysis might bbe carried out using the following steps.
1. Take a common midpoint gather, identify a reflection of interest, and plot its ampli-tude vs offset A midpoint gather is a collection of traces where the source and receiverfor any trace has the same midpoint. Often the data are redatumed down to thereflector of interest.
2. Pick R(θ) from the data and plot on a graph. Find the slope and the intercept of thebest fit lines as a function of angle using the above formula. That is, find A and B.
3. Plot A vs B for different midpoints as shown in the crossplot of Figure 2.15.
4. The most interesting midpoint is where the oil or gas fluids have a marked signaturein the crossplot shown in Figure 2.16. Simms et al. (2000) writes the following.
AVO crossplots are a simple and elegant way of representing AVO data. Offset varia-tions in amplitude for reflecting interfaces are represented as single points on a cross-plot of intercept and gradient. The advantage of this type of plot is that a great dealof information can be presented and trends can be observed in the data that would beimpossible to see with a standard offset (or angle) versus amplitude plot. The cross-plot is an ideal way of examining differences in AVO responses that may be related tolithologic or fluid-type variations. Commonly used techniques for revealing these dif-ferences include color-coding samples from the crossplot and using this as an overlayto a seismic display or creating weighted (or ”equivalent angle”) stacks (i.e., linearcombinations of intercept (R0) and gradient (G).
2.9 Practical Aspects of AVO.
Simm et al. (2000) writes that The early literature approached AVO crossplots from thepoint of view of rock properties. A central concept that emerged from this work was the ”fluidline,” a hypothetical trend based on a consideration of brine-filled rock properties togetherwith simplifications of the reflectivity equations (Figure 1). If the intercept is plotted onthe x axis and the gradient on the y axis, then for consolidated sand/shale rocks the topand base reflections form a trend from the upper left to the lower right quadrant of thecrossplot that passes through the origin. When it was realized that data points for equivalenthydrocarbon-filled rocks plot to the left of this line, it became clear that normalizing the dataagainst the fluid line might provide an optimum AVO indicator. A real data plot is givenin Figure 2.17.
Details for implementing this AVO (i.e., Amplitude vs Offset) procedure are non-trivialbecause much data processing must be performed before the A and B pairs can be picked.Nevertheless, significant oil and gas deposits have been discovered by the AVO method.
The following is copied from Simms et al. (2000). Consider a single point in the lower rightquadrant on a crossplot (Figure 2.18). This point was generated from the AVO attributes(derived by least squares regression) associated with the maxima of a single zero-phase re-flection on a synthetic gather with no noise. It represents a class I response from the top of

50 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
0.0
0.0
−0.25
0.25
0.25−0.25Intercept
Slope
Slope vs Intercept
Fluid lineA,B points
Figure 2.15: Crossplot of slope (B) and intercept (A) pairs using well log data from theNorth Sea. The dashed line corresponds to the fluid line for α/β = 1.9. The A and B pairstend to lie on a trend that is consistent with the fluid line. Note, the fluid line assumes aconstant density, the actual density profile is used to compute A and B.
Figure 2.16: Schematic of crossplot of slope (B) and intercept (A) pairs. A fluid line forα/β = 2.0 was assumed. Different classes of rock will plot in different quadrants of the plot(Simm et al., 2000).

2.9. PRACTICAL ASPECTS OF AVO. 51
Figure 2.17: A real data example. (a) Stacked section illustrating a bright spot with a topsand pick in green. (b) Time-window crossplot generated from a 40-ms window around thetop-sand pick. (Simm et al., 2000).

52 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
a brine-filled consolidated sand at the boundary with an overlying shale, i.e., the amplitudeis decreasing with offset. This representation might be called a ”horizon crossplot” as itrelates to a single reflecting interface.
If data from several gathers with the same reflection are crossplotted, then the crossplotsignature is of course the same?a single point on the plot. However, if random noise is addeduniformly across the gathers (such that the S/N decreases with offset), the crossplot responsebecomes an oval distribution of points around the real location (Figure 2.18b). This is due tothe sensitivity of the gradient estimation to noise. Hendrickson has termed this the ”noiseellipse.” This noise trend is easily recognized on real data, for example by crossplotting alimited number of samples from the same horizon from a seismic section. The extension ofthe trend parallel to the gradient axis is an indication of the amount of noise in the data.On real data the noise trend usually has a slope of about ?5 or more. The effects of othertypes of noise (such as RNMO) will not be dealt with here.
Cambois indicated that the slope of the noise trend is dependent on two-way traveltime,velocity structure, and offset. On real data the general position of a data cluster (such asthat shown in Figure 2.18b) is dependent on the relative scaling of R0 and G (and maybe affected by residual moveout or uncorrected amplitude decay). However, the slope of thenoise trend is independent of this scaling.
Although random noise appears to be the principal component of noise on AVO cross-plots, other types of noise can have an influence on the observed trends (such as RNMO).
Porosity and shale content. A change in lithology can be modeled by varying the poros-ity of the sand or the shale content. Increasing the porosity has two effects?to decrease theAVO gradient (i.e., the Poisson ratio contrast with the overlying shale has been reduced)and to decrease the intercept (owing to a decrease in the impedance contrast). The decreasein intercept gives rise to a low-angle porosity trend that intercepts the gradient axis.
Changing the porosity of the sand in the model (but still maintaining the criteria ofnoninterfering reflections) results in a crossplot that shows a series of ellipses aligned at anangle to the gradient axis (Figure 2.18c). The trend imposed by the eye on this data clusterwould be somewhere between the porosity trend and the noise trend.
A change in lithology due to increasing shale content of the sand also lowers the gradientand intercept, but the trend is steeper than the porosity trend. It may even be close to thenoise trend. In the case where the shale component in the sand is different from the overlyingshale (as might be found at a sequence boundary), then the ”lithologic trend” would have anonzero intercept value.
This discussion illustrates that a given area might not have one background trend but apossible variation, depending on the relative contributions of shale and porosity which, inturn, are determined by sedimentary facies. This is a moot point, however, given that inpractice noise obscures the lithologic trend.
The gas effect. Figure 2.18 shows the effect of fluid substituting the sands of varyingporosity (again the reflections are separate and noninterfering). The effect of the hydrocar-bon is not so much to define a trend as to create a separate data cluster occupying a positionto the left of the brine-bearing data points. The greater the effect of the hydrocarbon on theVP/VS ratio of the sand, the further the data points will plot away from the brine-filled

2.9. PRACTICAL ASPECTS OF AVO. 53
Figure 2.18: The anatomy of AVO crossplots. (a) A single class I reflection. (b) The noiseassociated with the measurement of gradient on numerous gathers. (c) The porosity effect.(d) The gas effect. (e) The optimum discriminator. (f) The time-window crossplot. (Simmet al., 2000).
data points.In these models, the optimum discriminator can be determined statistically (Figure 2.18).
This will depend on the amount of noise, the lithologic variation, and the magnitude of thegas effect. This trend may or may not pass through the zero point. In the real-world case,knowledge of the noise trend could be used to model the optimum discriminator (assumingall other effects on R0 and G could be accounted for). If the lithologic variation is not large,a range of trends may exist that would discriminate equally well.
So far, discussion has centered on the horizon crossplot. If samples from a time windoware incorporated into the crossplot, the horizon sample points, together with reflections fromthe base of the sand (plotting in the upper left quadrant), are included in an ellipse of pointscentered on the origin (Figure 2.18f). The organization of data around the origin does nothave a physical significance; it is simply the result of the fact that the mean of seismic datais zero. Noise related to sampling parts of the waveforms other than the maxima is infillingthe area between the two data clusters.
Cambois has shown that the slope of what might be called the ”time-window” trend (i.e.,a line drawn through the data which passes through the origin) is dependent on the S/N ofthe data. The lower the S/N, the steeper the trend. This trend may be close to the optimumdiscriminator or it may not. The noisier the data, the closer this time-window trend willbe to the noise trend.
In the case where S/N is very high, it could be argued that the line derived from a time-windowed crossplot is equivalent to an average rock property trend (call it the fluid line ifyou must) that can be inferred from a crossplot derived from well data. Given the general

54 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
level of S/N of most seismic data, this occurrence is likely to be rare.
Crossplots in practice. It is clear that the authors see little value in time-window cross-plots, owing to the effects of noise. However, these crossplots have successfully recognizedhydrocarbon-related AVO anomalies, usually related to gas where the change in crossplotposition is dramatic. Oil-related anomalies are usually well hidden in the noise of the plot.Figure 2.17 shows an example of a time-window crossplot related to a bright spot and itscorrelative reflector. The samples from the bright spot are clearly anomalous in terms oftheir AVO behavior.
On the other hand, the horizon crossplot clearly targets the reservoir of interest andhelps determine the noise trend while revealing the more subtle AVO responses. Figure ??shows the horizon crossplot for the portion of reflector marked in Figure ??. The responsesare characterized by negative reflections and positive gradients (i.e., a class IV response).The nonbright part of the reflector has a high angle slope shown on the near/far crossplotto be almost totally due to noise. The bright spot has a lower-angled slope on the crossplot(owing to higher S/N), and it is possible to see the noise trend as a second-order effect.
Horizon crossplots can be generated from maps created from AVO attributes or partialstack 3-D interpretations. These crossplots need to be made in a number of locations to makesure that an adequate sample has been analyzed. In practice it may not be easy to identifyan optimum discriminator from the crossplots, but the noise trend is usually straightforwardto determine.
AVO anomaly maps can be created from linear combinations of R0 and G. These com-binations are usually of the form R0 +Gx, where x = −G/R0 and is determined from theslope of the trend on the crossplot. Considering that the reflection amplitude is describedby Rc = R0 +G sin 2θ, x represents an ”effective” angle. Any slope on an AVO crossplot isan ”effective angle stack.” However, which trend should be used to create the AVO anomalymap?
The answer (as in many issues in seismic interpretation) is that it is impossible tobe definitive. Although crossplots are useful to determine which equivalent stack is likelyto be most discriminatory in terms of fluids, they are only a one-dimensional view of alimited amount of seismic data. The real interpretation issue is whether the anomalousresponses represent porosity or hydrocarbon effects, and the only way to determine whichinterpretation to make is to analyze the relationship of the anomaly to mapped structure.In some cases, the equivalent angle stacks representing the noise trend, the time-windowtrend, and the optimum discriminator may give similar results, owing to the fact that thehydrocarbon effect is a displacement at a high angle to all these trends.
Probably the best approach to the use of crossplots in interpretation is to be publishedby Hendrickson (in press). He illustrates the use of a range of equivalent angle stacks inan interpretation, examining the amplitude conformance to structure on each stack as wellas recognizing their significance in terms of the AVO crossplot. Interpretation is a questionof ”covering all the angles” so to speak. Further Reading. ”AVO attributes and noise:pitfalls of crossplotting” by Cambois (SEG 1998 Expanded Abstracts). ”Framework for AVOgradient and intercept interpretation” by Castagna et al. (GEOPHYSICS, 1998). ”Prin-ciples of AVO crossplotting” Castagna and Swan (TLE, 1997). ”Another perspective onAVO crossplotting” by Foster et al. (TLE, 1997). ”Stacked” by Hendrickson, (Geophysical

2.9. PRACTICAL ASPECTS OF AVO. 55
Figure 2.19: Horizon crossplots. (a) R0/G crossplot for the pick shown in real data Figureand illustrating the different trends associated with the bright spot and the ”background”reflectivity. (b) Near/Far crossplot illustrating that the background trend on the R0/Gcrossplot is related to noise and not to lithology. (Simm et al., 2000).

56 CHAPTER 2. PHYSICS OF ELASTIC WAVE PROPAGATION
Prospecting, 1999). ”Yet another perspective on AVO crossplotting” by Sams (TLE, 1998).
2.10 Summary
The stress-strain relations are introduced for an elastic medium, and the resulting equationsof motion are derived. There are two types of solutions to this equation, P waves and Swaves. Solving a boundary value problem for a layered medium reveals the analytic formulafor PP and converted PS reflection waves. These formula show the existence of two typesof S waves, SV and SH waves. Particle motions of S waves is perpendicular to the directionof wave propagation, and the S-wave velocity is typically slower by a factor of two or morecompared to P waves. The analytic expressions for the PP reflection coefficient revealsthat the AVO curves can be used to distinguish gas-filled sands from sediment-brine-filledsands. AVO analysis applied to real data is typically implemented by picking R(θ) valuesfrom horizons of interest in CMPs, estimating and plotting the associated A-B curves,and searching for deviations of points from the fluid line. Deviations can sometimes beassociated with gas plays, or other types of lithologies. The fluid line is found by predictingthe R(θ) curves from the density and velocity values in a well log devoid of gas shows. Inpractice AVO analysis appears to work best for young sand-shale sediments, and not workso well for older consolidated rocks such as limestones or older stiff sands. This is becausethe stiffness of the rock is primarily controlled by the hard rock matrix (such as limestone)and not by the fluid filling its pores. In this case, filling pores with gas or brine should notgreatly change the impedance properties.

Bibliography
[1] Aki, K., and Richards, P., 1980, Quantitative seismology: Theory and Methods: Free-man Co., NY, NY.
[2] Foster, D., Keys, R., and Reilly, J., 1997, Another perspective on AVO crossplotting:The Leading Edge, September issue.
[3] Kinsler, L. and Frey, A., 1961, Fundamentals of Acoustics, . ley and Sons, NY, NY.
[4] Ostrander, W. J., 1984, Plane-wave reflection coefficients for gas sands at nonnormalangles of incidence: Geophysics, 49, 1637-1649.
[5] Shuey, R.T., 1985, Application of the Zoeppritz equations: Geophysics, 609-614.
[6] Simm, R., White, R., and Uden, R., 2000, The anatomy of AVO crossplots, The LeadingEdge, Vol. 19, No. 2, pp. 150-155.
[7] Udias, A., 1999, Principles of Seismology: Cambridge University Press.
[8] Zoeppritz, K., 1919, Erdbebenwellen VIII B, On the reflection and penetration of seismicwaves through unstable layers: Goettinger Nachr., pages 66-84.
2.11 Problems
1. Identify the direct arrival, air wave, surface waves, refraction arrivals, and reflectionarrivals in the CSG shown in Figure 2.13. Estimate the apparent velocity in thex-direction Vx and the associated period for each event. From these calculationsdetermine the wavelengths. Show work.
2. Which arrivals have the same apparent velocity as the actual propagation velocity ofthat event? Why?
3. The 1-D SH wave equation is the same form as the 1-D acoustic wave equation, exceptc becomes the shear wave velocity, P becomes the y-component of displacement v,c=sqrt(mu/rho) where mu is the shear modulus, and the SH wave equation is
1/c2∂2v/∂t2 − ∂2v/∂z2 = 0 (2.39)
SH (or shear horizontal) refers to the fact that the shear wave particle motion isperpendicular to the direction of particle motion, and is along the horizontal direction
57

58 BIBLIOGRAPHY
(in and out of plane of paper). The SH continuity conditions at the interface at z=0are a). Continuity of y-displacement v+ = v−., b). Continuity of shear traction:µ∂v/∂z+ = µ∂v/∂z−, where µ is the shear modulus.
Derive the y-displacement reflection and transmission coefficients for a plane SH wavenormally incident on a planar interface in an elastic medium.
2.12 Appendix 1: Elastic Parameters
Some elastic parameters are are described below by Professor Steven Dutch in hiscourse notes at http://www.uwgb.edu/dutchs/structge/strsparm.htm.
Elastic material deforms under stress but returns to its original size and shape whenthe stress is released. There is no permanent deformation. Some elastic strain, like ina rubber band, can be large, but in rocks it is usually small enough to be consideredinfinitesimal. Many elastic materials obey Hooke’s Law behavior: the deformation isproportional to the stress. This is why spring balances work: twice the weight resultsin twice the deformation.
For materials, Hooke’s Law is written as: Stress = E Strain. Alternatively, the re-lationship is sometimes written E = Stress/Strain. This is the reverse of the waythe law is written in most physics texts. In physics, we can often apply the stress ina controlled way and we are interested in predicting the behavior of the spring, forexample, how it oscillates. In materials science and geology, we often know the strainand want to know what stress produced it. The two versions are equivalent; the onlydifference is which side the constant is written on. The constant E is called Young’sModulus. Because strain is dimensionless, Young’s Modulus has the units of pressureor stress, i.e. pascals.
2.12.1 Physical Meaning of Young’s Modulus
If strain = 1, stress = E, then Young’s Modulus can be considered the stress it wouldtake (theoretically only!) to result in 100 percent stretching or compression. In reality,most rocks fracture or flow when deformation exceeds a few percent, that is, at stressesa few percent of Young’s Modulus.
The seismic P- and S-wave velocities in rocks are proportional to the square root ofE. For most crystalline rocks, E ranges from 50-150 Gpa, averaging about 100. If wetake 100 Gpa as an average, and consider one bar (100,000 pa) of stress, we have:105 = 1011 Strain, or Strain = 10-6. Thus, rocks typically deform elastically by 10-6per bar of stress. This is a useful quantity to remember. Elastic strain in rocks istiny - even ten kilobars typically results in only one percent deformation - if the rockdoesn’t fail first.

2.12. APPENDIX 1: ELASTIC PARAMETERS 59
e yye xx
Stress Stress
e yy e xxPoisson Ratio =
Figure 2.20: Compressing a box in one direction elongates it in the perpendicular direction.
2.12.2 Poisson’s Ratio
When a material is flattened, it tends to bulge out at right angles to the compressiondirection. If it’s stretched, it tends to constrict. Poisson’s Ratio is defined at the ratioof the transverse strain (at right angles to the stress) compared to the longitudinalstrain (in the direction of the stress).
Note that the ratio is that of strains, not dimensions. We would not expect a thinrod to bulge or constrict as much as a thick cylinder. For most rocks, Poisson’s Ratio,usually represented by the Greek letter nu (ν averages about 1/4 to 1/3). Materialswith ratios greater than 1/2 actually increase in volume when compressed. Suchmaterials are called dilatant. Many unconsolidated materials are dilatant. Rocks canbecome dilatant just before failure because microcracks increase the volume of therock. There are a few weird synthetic foams with negative Poisson’s Ratios. Thesematerials are light froths whose bubble walls collapse inward under compression.

60 BIBLIOGRAPHY
2.12.3 Shear Modulus
Poisson’s Ratio describes transverse strain, so it obviously has a connection with shear.The Shear Modulus, usually abbreviated G, plays the same role in describing shearas Young’s Modulus does in describing longitudinal strain. It is defined by G = shearstress/shear strain. G can be calculated in terms of E and v: G = E/2(1 + ν). Sincev ranges from 1/4 to 1/3 for most rocks, K is about 0.4 E.
2.12.4 Bulk Modulus
The bulk modulus, K, is the ratio of hydrostatic stress to the resulting volume change,or K = pressure/volume change.
It’s easy to show the relationship between K, E, and Poisson’s ratio (ν Consider theeffects of pressure P acting on a unit cube equally along the x- y- and z-axes. Thepressure along the x-axis will cause the cube to contract longitudinally by an amountP/E. However, it will also bulge to the side by an amount vP/E, in both the y- andz-directions. The net volume change just due to the component in the x-direction is(1 - 2ν P/E. The minus sign reflects the fact that the bulging counteracts the volumedecrease due to compression. Similarly, compression along the y- and z- axes producessimilar volume changes. The total volume change is thus 3(1 - 2ν P/E. Since K =P/volume change, thus K = E/(3(1 - 2ν Since v ranges from 1/4 to 1/3 for mostrocks, K ranges from 2/3E to E.
Physically, K can be considered the stress it would take to result in 100 per centvolume change, except that’s physically impossible and elastic strain rarely exceeds afew percent anyway.
If ν = 1/2, then K becomes infinite - the material is absolutely incompressible. Ob-viously real solids cannot be utterly incompressible and therefore cannot have ν =1/2.
2.12.5 Relations Between Elastic Parameters
There are really only two independent quantities, so if we know any two quantitiesE, ν, G and K, we can calculate any others. The relations are shown in Figure 2.21.Find the two known parameters and read across to find the other two.
2.12.6 Viscous Deformation
Viscous materials deform steadily under stress. Purely viscous materials like liquidsdeform under even the smallest stress. Rocks may behave like viscous materials underhigh temperature and pressure.
Viscosity is defined by N = (shear stress)/(shear strain rate). Shear stress has theunits of force and strain rate has the units 1/time. Thus the parameter N has theunits force times time or kg/(m-sec). In SI terms the units are pascal-seconds. Olderliterature uses the unit poise; one pascal-second equals ten poises.

2.12. APPENDIX 1: ELASTIC PARAMETERS 61
n
n
G,
G
Known
E
E
E
G,
E,
E,
E,
G
K
K
K,
(1−E/3K)/2
(E/2G)−1
(2G−3K)/(3K+4G) G
G
E/(3−E/3K)
(E/3)/(3−E/G )
K
K
K
K =G =
ν
ν
ν
ν =
ν
12G (3K+4G)
ν ν
ν ν2/3G(1+ )/(1−2 )
ν(E/3)/(1− 2 )ν(E/2)/(1+ )
ν2 (1+ )G
/
/3K
E=
(1− 2 )ν 3/2K(1−2 )/(1 + )
2
Figure 2.21: Table of elastic constants. Only two of the constants are independent in anisotropic medium.

62 BIBLIOGRAPHY

Chapter 3
Traveltime Calculation by Solution ofEikonal Equation
This chapter introduces the eikonal equation, and shows how to solve it by a finite-differencemethod. The output is the first-arrival traveltime field for a smoothly varying inhomoge-neous velocity model. These traveltimes are used for both traveltime tomography andreflection migration.
Section 1 describes the derivation of the eikonal equation, followed by section 2 whichpresents the algorithm for computing traveltimes by a finite-difference solution to the eikonalequation.
3.1 Eikonal Equation
The elastic isotropic wave equation is given by
ρ∂2ui
∂t2=∂τij∂xj
, (3.1)
where
τij = λδij∂uk
∂xk+ µ(
∂ui
∂xj+∂uj
∂xi). (3.2)
Here, repeated indices indicate summation from 1 to 3, uk corresponds to the kth particledisplacement, ρ is density, and λ and µ are the Lame’s constants.
For a harmonic plane wave source oscillating at angular frequency ω and a scattererembedded in a homogeneous medium, it is reasonable to assume that scattered far-fieldfirst arrivals can be approximated by a free-space Green’s function, i.e,
~u( r , ω) ∼ ~A( r )eiωτro , (3.3)
where the scatterer is at the origin, τso is the traveltime from the scatterer to the inter-rogation point r , and ~A( r ) is a displacement vector that accounts for scattering andgeometrical spreading losses.
Equation 3.3 can be used as an ansatz or trial solution to the wave equation. Theunknowns ~A and τ can be found by plugging equation 3.3 into equation 3.1 to yield a
63

64 CHAPTER 3. EIKONAL EQUATION
S S S S
S S S S
S S S S
S S S S
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
❃ ▼
Figure 3.1: Slowness model discretized onto a rectangular grid of cells, each with an un-known slowness si.
quadratic equation in ω. At high frequencies, the geometrical spreading term is governedby the transport equation:
−ρ ~A+ (λ+ µ)( ~A · ∇τ)∇τ + µ|∇τ |2 ~A = 0. (3.4)
This equation is true either by:
1. choosing ~A · ∇τ = 0 which implies
|∇τ |2 = ρ/µ
= vS−2, (3.5)
2. or choosing ∇τ to be parallel to ~A to give
|∇τ |2 = ρ/(λ+ 2µ)
= vP−2, (3.6)
where vP and vS are the P- and S-wave velocities, respectively.
Equations 3.5 and 3.6 are the S- and P-wave eikonal equations, respectively, whose solutionsyield the traveltimes of the first P- and S-wave arrivals everywhere in an inhomogeneousvelocity medium. They also lead to the traveltime integral which is used to calculate thetraveltimes of rays that traverse the medium.
3.1.1 Finite Difference Solution To The Eikonal Equation
The traveltime field can be computed by a finite-difference solution to the eikonal equation(Vidale, 1988; Qin et al., 1992). For the refraction tomography example in Figure 3.1, thefinite difference algorithm is given in the following steps:

3.1. EIKONAL EQUATION 65
1. Project the slowness field s(x) onto a rectangular grid of nodes as shown in Figure 3.1,and assume a constant slowness value si in the ith cell.
2. Calculate the first arrival traveltime from the source point to its nearest eight neigh-boring nodes by simple ray tracing or a simple finite-difference approximation to theeikonal equation. In the Figure 3.2a example, the traveltime tB1 at point B1 is calcu-lated by tB1 = ∆x s( ~B1), where ∆x is the distance between the source and the pointB1. The other seven gridpoints are timed in a similar fashion. The outer ring of timedgridpoints represents the computational wavefront at a particular iteration; and thecomputational wavefront expands along with the physical first arrival wavefront. Raytracing is used until the computational wavefront is at least 5 points from the sourcepoint (see Qin et al., 1992).
3. Approximate the eikonal equation by a finite difference formula (Vidale, 1988); e.g.,in Figure 3.2b the finite-difference approximation centered at point c becomes
((te − tw)/2h)2 + ((tn − ts)/2h)2 = s(~c)2 (3.7)
If the known traveltimes are at points w, n, and s then the unknown traveltime atpoint e can be found from the above equation to give
te = tw + 2h√
(s2 − (tn − ts)2/4h2). (3.8)
The gridpoints at or next to the corner points are timed by the stencils shown inFigure 3.2b.
4. Search for the minimum traveltime point along the computational wavefront and, fromthis minimum traveltime point, expand the solution to its nearest outer neighbor. Forexample, the dotted circle in Figure 3.3 is assumed to belong to the minimum travel-time so the solution is expanded (using a formula similar to that in equation 3.8) fromX to its nearest neighbors (open circles along perimeter in Figure 3.3b) . Update thecomputational wavefront by including the 3 newly timed points shown in Figure 3.3c.
5. Step 4 is repeated until all of the gridpoints in the model have been timed. Expandingoutward from the minimum traveltime point insures that the computational wavefrontstays nearly coincident with the physical wavefront of first arrivals. This preventsviolation of causality (Qin et al., 1992).
Note that the above procedure times new points along and ”expanding wavefront”.This is superior to that of an ”expanding square” because an ”expanding square” solutionwill violate causality, as shown in Figure 3.4. The problem with this ”expanding square”strategy is that it is invalid for models with moderate to large velocity contrasts. It isbecause causality, that is ”the time for the part of the ray path leading to a point must beknown before the time of the point can be found” (Vidale, 1988), is violated in some cases.This can lead to negative values inside the square root resulting in completely erroneoustraveltimes. Figure 3.4 is a sketch to show the difference between the actual wavefronts and

66 CHAPTER 3. EIKONAL EQUATION
2e wT = T + 2h* s - (dT /dz) c
2
C3 B4 C4
B3 A
C2 B2 C1
B1
a).
b).
w c e
sw
ne
c
l
2 2
cc1 Ac
l = h 2
sw ne2 2
cT = T + l* s - (dT /dl)
T = T + l s - (dT /dl)
n
s
Figure 3.2: The finite-difference grid and differencing stencils associated with the discreteapproximation to the eikonal equation. The stencils are shown for the (a). source pointregion and (b). away from the source point region. In Figure (a), point A is the sourcepoint and the points shown as filled or dashed circles are about to be timed. In Figure (b),the dashed circles are about to be timed.

3.1. EIKONAL EQUATION 67
a). b). c).Figure 3.3: Figure illustrating the ”expanding wavefront” method. (a) The solution regionand the minimum traveltime point (filled dot inside an open circle ). The dashed curverepresents the actual wavefront. (b) The solution region is expanded to the points (opencircles along perimeter) adjacent to the minimum traveltime point. The finite-differencestencils used to time the new points are shown above the solution region. (c) New solutionregion and new minimum traveltime point among the new perimeter points.

68 CHAPTER 3. EIKONAL EQUATION
V1
V2
b).
a).
❃
❃
V1
V2
Figure 3.4: A sketch to show the differences between (a) the actual wavefront and (b) thewavefront calculated by the expanding square method for a 2 layer model. Note that theexpanding square wavefront is incorrect if the critical angle θc is less than sin−1(V1/V2) =45◦ ( or V1/V2 < 0.7071 ).

3.2. TRAVELTIME INTEGRAL 69
those calculated by the ”expanding square” method. The mis-calculation of the head wavesis clearly seen. The above procedure can be quite expensive because each gridpoint willinitiate a minimum traveltime search along its associated computational wavefront of O(N)points. Thus, the computational cost to time the entire grid will be O(N3) operations fora square model of NxN gridpoints. To reduce this cost to O(N2) operations, Qin et al.(1992) suggest that the perimeter search for the minimum traveltime point be reinitiatedonly after the computational wavefront expands over some fixed time interval, say δt. Priorto the next perimeter search at, say t+ δt, the solution is expanded in the same pointwiseorder as determined by the previous perimeter search at t. Larger δt values will lead to lesstraveltime accuracy, so there is a tradeoff between accuracy and computational efficiency.
The advantages of the calculating traveltimes by a finite-difference method comparedto raytracing are (Vidale, 1988) that traveltime fields can be computed in shadow zones,some multipathing events are included and the entire grid is efficiently timed. Knowingthe traveltimes at all gridpoints can facilitate applying traveltime tomography to the data(Nolet, 1987). The disadvantage is that only first arrivals can easily be computed. SeeFigure 3.5 for an example of traveltime contours computed by a finite difference solution ofthe eikonal equation for a low velocity cylinder model.
Raypaths are computed by either tracing rays normal to a wavefront, or by invokingthe traveltime reciprocity equation (Saito, 1990)
τrs = τrx + τxs, (3.9)
where τxs, τrx and τrs are the first arrival traveltimes, respectively, from the source points to x, from the receiver point r to x, and from the source point to the receiver point.The first arrival raypath between s and r is described by the locus of points x that satisfyequation 3.9.
3.2 Traveltime Integral
The traditional means for solving the eikonal equation is by a shooting ray trace method (Akiand Richards, 1978). While useful, the shooting method can be expensive when the entiregrid of traveltimes is needed, and can be difficult to implement when there are numerousshadow zones as shown in Figure 3.6. Here we describe a simple algorithm for tracing raysvia the shooting method.
The first step is to pound the eikonal equation into a traveltime integral. We do thisby defining the unit direction vector dl = ∇τ(x)/|∇τ(x)| which depends on the slownessmedium s(x). Therefore the eikonal equation can be cast into the form
dl · ∇τ(x) = s2(x), (3.10)
or rearranging and defining dτ(x)/dl = ∇τ(x) · dl we get
dτ(x)dl
= s(x)2/|∇τ(x)| = s(x). (3.11)
Integrating this one-dimensional ODE with respect to the raypath differential length we getthe traveltime integral
τ(x|s) =∫
raypaths(x)dl, (3.12)

70 CHAPTER 3. EIKONAL EQUATION
Figure 3.5: (Top) First arrival traveltime contours for a source located on the left side of alow velocity cylinder. (Bottom) First arrival traveltime contours for a source located at thestar position on left side of the cylinder. All traveltimes computed by a Finite Differencesolution to the eikonal equation.

3.2. TRAVELTIME INTEGRAL 71
Figure 3.6: (a). Langan velocity model adapted from a Southern California well log. (b).Rays computed by a shooting method. Note the failure of rays to penetrate into the shadowzones. (c). Eikonal traveltimes along the receiver well.

72 CHAPTER 3. EIKONAL EQUATION
where we have introduced the traveltime notation τ(x|s) to account for the initial conditionsthat the ray starts out at the source coordinates s and ends at the observer point x. Thetraveltime computed by the above integral is the time it takes for energy to follow Snell’slaw and propagate from s to x given some starting ray angle at s. It is a high frequencyapproximation valid for a slowness medium whose dominant wavelength (take a 2D spatialFourier transform of model and highest wavenumbers kx and ky in the model spectrumdefine the shortest wavelengths in the slowness mdoel) is about 3 or more times longerthan the dominant frequency in the source wavelet (Bleistein, 1984). The problem with thetraveltime integral is that it is non linear with respect to the slowness field because both theraypath and the integrand depend on the slowness field. The next section will show howto linearize this modeling equation so that we can invert traveltime data for the slownessfield. This inversion procedure is often refered to as traveltime tomography.
The procedure for solving the traveltime integral is sketched in rough psuedo-code.
[x(1),z(1)]=[1,1]*dx;angle=pi/6;m=sin(angle)/cos(angle);z(2)=z(1)+m*(dx+x(1));for i=2:L[gradx,gradz]=grad(s,x(i),z(i)); % Find gradient of
% slowness field s at [x,z].[dlx,dlz]=[gradx,gradz]/(sqrt(gradx^2+gradz^2));% [dlx,dlz] is the unit vector perpendicular to flat interface% Write a subroutine that finds angle of transmitted ray across this% flat interface that satisfies Snell’s law for incident ray with% slope=[z(i)-z(i-1)]/(x(i)-x(i-1)]. This transmitted ray has a new% slope we define as m, which is used in next calculation statement.z(i+1)=z(i)+m*(dx+x(i));x(i+1)=x(i)+dx;end
The above pseudo code needs to be regularized to avoid zeros in the denominators, e.g., theslowness gradient calculation, and assumes a ray that monotonically moves to the right.
3.3 Perturbed Traveltime Integral
The eikonal equation can be used to derive the traveltime integral associated with a per-turbed slowness medium. This integral is the keystone equation by which the slownessmodel can be efficiently updated in traveltime tomography.
Let the slowness perturbation from a background slowness field s(~x) be given by δs(~x),and let the corresponding perturbed traveltime field be given by t(~x) + δt(~x). Here, t(~x) isthe unperturbed traveltime field and δt(~x) is the traveltime perturbation. The perturbedtraveltime field honors the eikonal equation
|∇t(~x) +∇δt(~x)|2 = |∇t(~x)|2 + 2∇δt(~x) · ∇t(~x) + |δt(~x)|2
= s(~x)2 + 2δs(~x)s(~x) + δs(~x)2. (3.13)

3.3. PERTURBED TRAVELTIME INTEGRAL 73
Subtracting equation 3.13 from the unperturbed eikonal equation we get
2 ∇t(~x) · ∇δt(~x) + |δt(~x)|2 = 2δs(~x)s(~x) + δs(~x)2, (3.14)
and neglecting the terms second order in the perturbation parameters this becomes
∇t(~x) · ∇δt(~x) = |∇t(~x)| dl · ∇δt(~x)
= δs(~x)s(~x), (3.15)
where dl is defined to be the unit vector parallel to the unperturbed ray direction, so that∇t(~x) = |∇t(~x)| dl.
Defining the directional derivative along dl to be d/dl = dl · ∇ (note, this direc-tional derivative is determined by the background slowness distribution, not the perturbedmedium), and dividing equation 3.15 by |∇t(~x)| = s(~x) gives
dδt(~x)/dl = δs(~x). (3.16)
Multiplying both sides by dl and integrating along the old raypath finally yields the per-turbed traveltime integral
δt(~x) =∫
raypathδs(x′)dl′, (3.17)
which is correct to first order in the perturbation parameters. Equation 3.17 says thatthe traveltime perturbation due to a slowness perturbation is given by an integration overthe old raypath weighted by the slowness perturbation. This can be quite cost efficientbecause the traveltime perturbation calculation uses the old raypaths and does not requirethe retracing of rays through the perturbed slowness model.
Replacing the perturbation parameters in equation 3.17 by the unperturbed traveltimesand slownesses gives the traveltime integral
t(~x) =∫
raypaths(x′)dl′. (3.18)
The traveltime integral represents the integral equation solution to the unperturbed eikonalequation.This is a non-linear equation because both the raypath and integrand depend on the slownessmodel s(x′).Parameterization of Slowness Model. The slowness perturbation field s(x) can bediscretized into N cells of constant slowness so that the jth cell has slowness perturbationδsj . Equation 3.17 then reduces to a summation
δti =N∑
j
lijδsj (3.19)
where δti is the ith traveltime perturbation and lij is the segment length of the ith ray inthe jth cell. If there are M equations then these form a system of equations represented by
~δt = L~δs, (3.20)

74 CHAPTER 3. EIKONAL EQUATION
where L is the MxN raypath matrix with elements lij , ~δs is the Nx1 slowness vector,and ~δt is the Mx1 traveltime perturbation vector. If the slowness perturbations are zeroeverywhere except in the kth cell, then equation 3.19 becomes
δti = likδsk,
or dividing by the segment length
δti/δsk = lik. (3.21)
δt(~x)i/δsk is known as the Frechet derivative, or the change in the ith traveltime data withrespect to a change in the kth model parameter. When convenient, the perturbation symbolδ will be replaced by the partial derivative symbol ∂. Smoother parameterizations can beused such as piecewise continuous spline functions.
3.4 Traveltime Tomography
To solve for the slowness distribution from the observed traveltimes in the non-linear equa-tion 3.18 we first linearize it to get equation 3.17, solve this equation and update the slownessmodel. We then repeat this process until convergence.
1. Set initial model s(0) and find predicted times t(0) = Ls(0). Set nit = 0.
2. Find traveltime residual δt(nit), which is the difference between predicted and observedtraveltimes. Find perturbed slowness δs(nit) = LTL−1LTδt(nit). The matrix inversionis sometimes too expensive so we solve for δs(nit) by some type of iterative methodsuch as a limited number of iterations in a conjugate gradient method or steepestdescent method.
3. Update slowness s(nit+1) = s(nit) + δs(nit) and then find updated predicted traveltimest(nit+1) = Ls(nit+1).
4. Set nit = nit+ 1 and repeat steps 2-4 until convergence.
3.5 Summary
The eikonal equation is derived from the wave equation, and is used to compute both raysand traveltimes for high frequency waves propagating through a smooth velocity medium.In practice, this means that the characteristic wavelength of the velocity fluctuations mustbe more than three times longer than the source wavelength (Bleistein, 1984). The finite-difference solutions to the eikonal equations are computed and used to compute traveltimesand rays for traveltime tomography. Computing the traveltimes for every grid point isvery convenient for refraction tomography where there is dense source-receiver coverage inexploration surveys.

3.6. EXERCISES 75
3.6 Exercises
1. Prove equation 3.4. State the conditions under which it provides a correct kinematicdescription of wavefield propagation.
2. Sketch out a rough MATLAB code that solves the 2-D eikonal equation for an arbitraryvelocity model.

76 CHAPTER 3. EIKONAL EQUATION
Least Squares Optimization and Traveltime Tomography

Chapter 4
Least Squares Optimization andTraveltime Tomography
4.1 Introduction
Sometimes the best way to quickly understand a topic is to use an example, particularlyone that is both simple and practically interesting. Here I present the example of traveltimetomography. Many of the key ideas in this simple example reinforce the central principlesof seismic optimization, where other books provide greater details and depth of analysis.
We will introduce a special type of optimization, least squares inversion (Nolet, 1987; Gillet al., 1981;Fletcher, 1987; Nemeth et al., 1997). In this case, a misfit function is formedby summing the squared traveltime residuals and the solution is the one that minimizesthe misfit function. The traveltime residual is the difference between the observed andpredicted traveltimes. The obtained solution is the starting model for the next iterationbecause typical geophysical problems are strongly non-linear.
We will first review the main characteristics of an overconstrained system of equations,and then show how such systems characterize traveltime tomography problems. This exam-ple will illustrate the three features of a well-posed inverse problem: existence of a solution,uniqueness, and stability (Groetsch, 1993).
4.2 Least Squares Minimization
An overconstrained system of linear equations has more equations than unknowns. Forexample, the 3x2 system of equations symbolized by Ls = t is given by
1 01 1
0.7 0.7
·
(s1s2
)=
122
. (4.1)
Note, these equations are inconsistent, i.e., no one solution can simultaneously satisfy allof the equations. For example, the second and third equations conflict with one another.
A physical example related to equation 1 is the tomographic imaging experiment shownin Figure 4.1. The traveltime for each curved ray is governed by the traveltime integral:
t(x, y) =∫
raypaths(x, y)dl, (4.2)
77

78 CHAPTER 4. TRAVELTIME TOMOGRAPHY
1
s s1 2#1
#2
#3
0.7
Figure 4.1: Imaging experiment related to equation 1. The data are the measured travel-times, the segment lengths are denoted next to the segment, and the goal is to reconstructthe slowness value in each cell. Note, the total traveltime is the sum of the segment travel-times (i.e., (segment length)xslowness) in a ray.
where t(x, y) is the traveltime for waves to propagate from the source along the raypathto the observer point at (x, y), s(x, y) = 1/c(x, y) is the slowness and dl is the incrementalchange in distance along the raypath. The velocity model is discretized into N cells ofunknown constant slowness, the traveltime integral becomes approximated by a summation
ti =∑
lijsj (4.3)
over the subsegment lengths lij of the ith ray that intersect the jth cell, and there areM equations. This results in a MxN system of equations, denoted as Ls = t, where trepresents the measured Mx1 traveltime data vector, and s is the Nx1 vector of unknownslownesses in the cells. The MxN matrix L contains the segment lengths of the rays. TheAppendix derives this integral starting from the wave equation.
The goal is to solve the system of equations 4.3 and find the unknown slowness valuessi in each cell. The solution to this overconstrained system of equations gives the slownesstomogram s. Physically, the traveltime equations are inconsistent because the data containtraveltime picking errors and/or because the physics used to model the data is incomplete.
Geometrically, the three equations in 4.1 plot as straight lines shown in Figure 4.2a,and no common intersection point means that the equations are inconsistent. Althoughthere is no exact solution to equation 4.1, we would be happy with an approximate solution”close” to the points of intersection. Such a compromise is the least squares solution whichminimizes the following misfit functional:
ε = 1/2 [Ls− t ]T · [Ls− t ],

4.2. LEAST SQUARES MINIMIZATION 79
S1
S2
S1
S2
s + s = 2
s = 11
1
0.7 s + 0.7 s = 2
ε
2
2
*
*1
Figure 4.2: (a). Lines associated with equation 1, where the equations are inconsistent sothere is no common intersection point. (b). Error surface associated with misfit function.

80 CHAPTER 4. TRAVELTIME TOMOGRAPHY
= 1/23∑
i=1
2∑
j=1
(lijsj − ti)2,
= 1/23∑
i=1
r2i , (4.4)
where ri is the ith residual, i.e., the difference between the ith component of the predicted tand the actual RHS vector t. If the rays bend then the matrix components in equation 4.1depend on the unknowns s. This means that the above system of equations should bereplaced by their linearized approximation represented by Loδs = δt, as discussed in a latersection. Here, δs = so − s, where so is the background slowness model.
Plotting the misfit value against s1 and s2 yields the error bowl shown in Figure 4.2b. Itis obvious that the bottom of this error bowl is directly over the optimal solution s∗, whichwill also be considered the least squares solution. There is a bottom to the error bowl, sowe now know there exists a least squares solution.
Plotting out the error surface to find the optimal solution may be convenient for sys-tems of equations with just a few unknowns, but is impractical for many unknowns. Amore systematic approach is to recognize that at the bottom of the error bowl the partialderivatives ∂ε/∂si = 0 are simultaneously zero. That is,
∂ε/∂sk =3∑
i=1
2∑
j=1
[(lijsj − ti)lij∂sj/∂sk + (lijsj − ti)sj∂lij/∂sk],
≈3∑
i=1
2∑
j=1
(lijsj − ti)lijδjk, (4.5)
where δjk = 1 if j = k, otherwise it is equal to zero. The far-right term sj∂lij/∂sk(∑
j lijsj−ti) is often neglected partly because it is too expensive to compute and partly because∂lij/∂sk is really small when the background slowness model is sufficiently close to theactual model. Of course, if the rays were straight then Tik is identically zero becausestraight rays do not change with slowness perturbations. Therefore,
∂ε/∂sk =3∑
i=1
(liksk − ti)lik,
= [LT (Ls− t)]k = 0 k = 1, 2. (4.6)
This is exactly the gradient for the small residual Gauss-Newton method derived in Fletcher(1987) or Gill (1981). The extra term of second derivatives is not present because thestarting equations were assumed to be linear.
4.2.1 Normal Equations
Equation 4.6 can be more compactly written as
LTL s∗ = LT t∗, (4.7)

4.2. LEAST SQUARES MINIMIZATION 81
t 1
t 2
t 3
Ls − t
t
LsPredicted Traveltimes
Observed Traveltimes
*
*
Figure 4.3: The least squares solution finds the optimal s∗ so that the residual Ls∗ − t isorthogonal to the predicted traveltimes given by Ls∗.
and are called the normal equations. In this case, LTL is a symmetric 2x2 matrix andthe two unknowns s1 and s2 can be solved by inverting the above matrix to give the leastsquares solution denoted as s∗. These two constraint equations were obtained by settingto zero the misfit derivative along each of the si coordinates. Note, we assume a system oflinear equations, otherwise the derivative w/r to si would also be applied to the lij terms.
For a general MxN system of linear equations, equation 4.7 is used to solve for theleast squares solution that minimizes the sum of the squared residuals. These are called thenormal equations because equation 4.7 can be rearranged and multiplied by sT to give
(Ls,Ls− t) = 0, (4.8)
which says that the residual vector r = Ls − t is normal to the predicted RHS vector Ls,as shown in Figure 4.3.
What kind of matrix L is associated with the diagram in Figure 4.3? The answer isL= [a b; c d; 0 0], because Ls = t can be expressed as a sum of column vectors
ac0
s1 +
bd0
s2 =
t1t2t3
, (4.9)
where each column vector is one of the column vectors in L. The last component of thesecolumn vectors is zero, so no weighted linear combination of them can create a componentthat lives in the t3 dimension shown in Figure 4.3. In other words, the columns of Lonly span the horizontal plane formed by the t1 and t2 basis vectors. This is anotherinterpretation of inconsistent traveltime equations: they predict data vectors t that cannotlive in the same space as the observed data vector.

82 CHAPTER 4. TRAVELTIME TOMOGRAPHY
Exercises
1. The column span of the MxN matrix L is the ensemble of Mx1 vectors that arelinear combinations of the L column vectors. What plane is spanned by the 3x1column vectors in L = [1 1; 1 0; 1 0]? Is that plane closer to the observed 3x1 vector tthan the t1xt2 plane in Figure 4.3? The Mx1 t vector represents data, so the columnvectors of L are said to span a region of data space.
2. Can every region in three-dimensional space be spanned by the column vectors inL = [1 1; 1 0; 1 0]?.
3. What geometrical object, line or plane, is spanned by the column vectors in L =[1 2; 1 2; 1 2]? Are these two column vectors in data space linearly independent?
4. Linear combinations of slowness vectors span a model space. For the example L =[1 2; 1 2; 1 2], show that there is more than one 2x1 slowness vector s that yields thesame predicted traveltime equations. This means that the solution is non-unique.
5. The vectorso such that Lso = (0 0 0)T is known as a null space vector. Any nullspace vector added to a solution of L(s + s0) = t will also satisfy the traveltimeequations. In other words, there are non-unique solutions. The space spanned bythese null vectors define the model null space. What geometrical object is spanned bythe model null space vectors for L = [1 2; 1 2; 1 2]? This space is known as the modelnull space, and is characterized by zero eigenvalues of LTL.
6. Show that the model null space vector for L = [1 2; 1 2; 1 2] is the same as theeigenvector of LTL associated with a zero eigenvalue.
7. Insert a new ray that is parallel to ray 3 in Figure 4.1, and call it ray 4. Show thatthe three traveltime equations associated with rays 2, 3 and 4 in Figure 4.1 give riseto a non-empty null space. What does this say about the ability of a straight raycrosswell experiment to resolve lateral velocity variations? A crosswell experiment isone in which the receivers are along a vertical well and the sources are along anothervertical well offset from the receiver well.
4.2.2 Poorly Conditioned Equations and Regularization
The condition number of LTL can be large and therefore many different solutions can giverise to nearly the same value of ε. This is an example of an unstable or ill-conditionedinverse problem. To clarify this statement, we define a system of equations as
κ1 00 κ2
κ1 0.
·
(s1s2
)=
113
, (4.10)
where κ1 >> κ2. The corresponding normal equations are[
2κ21 0
0 κ22
]·(s1s2
)= LTt. (4.11)

4.2. LEAST SQUARES MINIMIZATION 83
1S
2S
ε
Figure 4.4: Poorly conditioned LTL leads to long valleys in the contoured misfit function.Equivalently, many different models can equally account for the data.
It is clear that if κ1 >> κ2 then the condition number (ie., maximum eigenvalue/minimumeigenvalue or cond = 2κ2
1/κ22) is very large. This means that quite different values of s2
give about the same value of ε. Equivalently, the misfit function shown in Figure 4.4 ischaracterized by the long narrow valley along the s2 axis where ε is somewhat insensitiveto large changes in the parameter value of s2.
In fact, if κ2 = 0 then the null space of LTL is non-empty and is spanned by the nullspace vector (0 1)T . Any scaled value of this null space vector will not change the residualvalue and therefore contaminate the solution with unrealistic model features. This is anexample of non−uniqueness in the inverse problem. To avoid non-uniqueness we introducean extra constraint in the misfit function, i.e.,
ε = 1/2||Ls− t||2 + 0.5λ||s− s0||2, (4.12)
where λ is a small damping parameter and s0 is an a priori guess to the solution. Theconstraint says that we wish to find s that minimizes the sum of the squared residuals andis also close to the a priori guess at s0. The degree of closeness is determined by the valueof λ.
The normal equations associated with this constrained misfit function is obtained bydifferentiating ε to give
∂ε/∂sk =3∑
i=1
2∑
j=1
(lijsj − ti)lij∂sj/∂sk + 0.5λ∂||s− s0||2/∂sk,
=3∑
i=1
2∑
j=1
(lijsj − ti)lijδjk + λ(sk − sok) = 0, (4.13)

84 CHAPTER 4. TRAVELTIME TOMOGRAPHY
or more compactly
[LTL + λI]s = Lt + λs0, (4.14)
and is sometimes known as the Levenberg-Marquardt solution. In the case of equation 4.11,the solution becomes s1 = [LT t]1/(2κ2
1 + λ) and s2 = [LT t]2/(κ22 + λ) if s0 = 0. Note, the
condition number is improved with damping where cond = (2κ21 + λ)/(κ2
2 + λ), at the costof somewhat diminished accuracy.
Other constraint equations include a smoothness constraint which incorporates the gra-dient raised to the nth power ||∇ns||2. Zhang and Toksoz (1998) compare the performanceof these roughness constraints and show that n = 2 or n = 4 provide superior performancecompared to n = 0.
4.2.3 Synthetic Traveltime Tomography Example
We will now apply the Gauss-Newton method with small residuals to the traveltime to-mography problem. The example is that of a transmission experiment where the model isgridded into a 20 by 20 grid of cells with unknown slowness. There are 20 sources evenlydistributed along the bottom boundary of the model, and each source shoots a straight rayinto each of the 20 evenly distributed receivers along the top boundary of the model. Thisgives rise to 400 traveltimes that are used as input data into the least squares Gauss-Newtonmethod. The model and data are linearly related because straight rays are employed.
The damped least squares solution resulted in the reconstructed models shown Fig-ure 4.5. In this case the vertical-layered model was best resolved while the horizontallayered model was least resolved. This is because the best resolution is achieved for raysthat are perpendicular to the direction of velocity variations, so that the nearly verticalrays are best at resolving nearly vertical interfaces.
For example, simply dividing the raypath length by the traveltime for a vertical raypassing through one vertical layer will yield the exact velocity of that layer. Hence, asequence of vertical layers (i.e., model with strictly horizontal velocity variations) can beuniquely reconstructed by inverting traveltimes associated with vertical rays. Conversely,if the model were purely horizontal layers then the lengths divided by the traveltimes willonly yield the average velocity of the layers.
If errors are added to the data, then least squares inversion can adequately handle Gaus-sian noise. As an example, Figure 4.6 depicts the Gauss-Newton solutions for standard andreweighted least squares inversion (Bube and Langan, 1994) when the traveltime data arecontaminated with zero-mean 1 percent Gaussian noise. Reweighted least squares becomesimportant when large non-Gaussian outliers are added to the noise, as shown in in Fig-ure 4.7. The top figure is the image from damped least squares while the bottom figure isfrom a reweighted least squares method (Bube and Langan, 1995). It is obvious that thelarge outliers have been suppressed by the reweighted least squares method.
Linearization
The earth’s velocity distribution varies in space, so the shortest traveltime path betweena source and receiver is not a straight line. The ray is curved, as shown in Figure 4.8.

4.2. LEAST SQUARES MINIMIZATION 85
2000
2500
3000
3500
4000
Z (m
)
Velocity Model Velocity (km/s)
10 20 30 40 50 60 70 80 90
20
40
60
80
2000
2500
3000
3500
4000
X (m)
Z (m
)
Slowness Tomogram (Damped LS) Velocity (m/s)
10 20 30 40 50 60 70 80 90
20
40
60
80
Student Version of MATLAB
2000
2500
3000
3500
4000
Z (m
)
Velocity Model Velocity (km/s)
10 20 30 40 50 60 70 80 90
20
40
60
80
2000
2500
3000
3500
4000
X (m)
Z (m
)
Slowness Tomogram (Damped LS) Velocity (m/s)
10 20 30 40 50 60 70 80 90
20
40
60
80
Student Version of MATLAB
Figure 4.5: Top two figures depict the two-layer vertical model and its damped least squaresreconstruction. Bottom two figures are the same except the model is a two-horizontal layermodel with a graben along the interface. Note, the ray directions are mostly orientedalong the vertical axis, so the vertical-layer model with layering parrallel to the rays is bestresolved (courtesy of Min Zhou).

86 CHAPTER 4. TRAVELTIME TOMOGRAPHY
2000
2500
3000
3500
4000
X (m)
Z (m
)
Actual Velocity Model Velocity (m/s)
20 40 60 80 100 120 140 160 180
50
100
150
2000
2500
3000
3500
4000
X (m)
Z (m
)
Final Damped LS Velocity Model (Gauss. noise) Velocity (m/s)
20 40 60 80 100 120 140 160 180
50
100
150
Student Version of MATLAB
Figure 4.6: Reconstructed models for (top) standard and (bottom) reweighted least squaresinversion for the vertical-layer model in Figure 4.5. The traveltime data are contaminatedwith 1 percent zero-mean Gaussian (courtesy of G. Waite).
2000
2500
3000
3500
4000
X (m)
Z (m
)
Final Damped LS Velocity Model (Gauss. noise+outliers) Velocity (m/s)
20 40 60 80 100 120 140 160 180
50
100
150
2500
3000
3500
X (m)
Z (m
)
Weighted Damped LS Velocity Model (Gauss. noise+outliers) Velocity (m/s)
20 40 60 80 100 120 140 160 180
50
100
150
Student Version of MATLAB
Figure 4.7: Same as previous figure except large outlier errors (about >500 percent) havebeen added to six of the traveltime picks (courtesy of G. Waite).

4.2. LEAST SQUARES MINIMIZATION 87
Consequently, the raypath geometry depends on the slowness model so the raypath lengthsin equation 2 also depend on the slowness model. Thus, the traveltimes in equation 2depend non-linearly on the slownesses. To linearize this equation, we choose a backgroundslowness model so that is very close to the actual model s. ”Close” means that the raypathsfor so are nearly the same as those for s. In this case, we have the background traveltimeequation given as to = Loso so that Lo ≈ L. The original traveltime equation is t = Ls,and subtracting it from the background traveltime equations give:
t− to = Ls− Loso,
= Lo(s− so). (4.15)
Setting δs = s− so and δt = t− to, we get the linearized traveltime equations:
δt = Loδs, (4.16)
where δs is known as the traveltime residual and δs is slowness perturbation. Often we willnot use the subscript in Lo. The strategy is to solve for δs = [LTL]−1LTδt, and find thenew update for the slowness field by
s′ = so + α[LTL]−1LTδt, (4.17)
where α is a scalar quantity 0 < α ≤ 1 known as the step length. It is selected by trial anderror to insure that the misfit function decreases after each iteration. The slowness field s′ isused as the new background slowness, and a new traveltime residual is found δt′ = t−Ls′.Here, Ls′ is the predicted traveltimes using the updated slowness and t is the observedtraveltime vector.
S S S S
S S S S
S S S S
S S S S
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
❃ ▼
Figure 4.8: Diagram of jth ray through a discretized earth model, where the ith cell has aconstant slowness si. For this ray, the segment length in the ith cell is given by lij .
More generally, a regularization parameter is introduced (see equation 4.14 and sets0 = 0) and the updating is repeated in an iterative manner:
s(k+1) = s(k) + α[LTL + λI]−1LTδt, (4.18)

88 CHAPTER 4. TRAVELTIME TOMOGRAPHY
where k is the iteration index and it is assumed that the [LTL + λI]−1LTδt is computedusing the kth slowness model.
4.2.4 Steepest Descent
In real applications, the earth model is gridded so that there can be anywhere from severalthousand unknowns to more than a million unknown slownesses. This means that the costof storing and direct inversion of [LTL] is prohibitive. Thus, an indirect iterative methodsuch as conjugate gradients is used, where only matrix-vector multiplication is needed. Asimpler cousin of the conjugate gradient method is steepest descent, and has proven usefulin a multigrid mode (Nemeth et al., 1997).
The regularized steepest descent formula is obtained by approximating the inverse to[LTL] by the recipricol of its diagonal elements:
[LTL + λI]−1 ≈ 1/[LTL + λI]iiδij , (4.19)
where δij is the Kronecker delta function. Substituting this approximation into equa-tion 4.18 yields the steepest descent formula
s(k+1)i = s
(k)i + α/[LTL + λI]ii[LTδt]i, (4.20)
where si denotes the constant slonwness in the ith cell. Note, only matrix-vector multipli-cation is needed (cost=O(N2)) compared to direct inversion which costs O(N3) algebraicoperations. Equation 4.20 is sometimes called a preconditioned regularized steepest descentbecause of the diagonal matrix approximation. It is closely related to the SIRT method(Nolet, 1987).
The 1/[LTL]ii = 1/∑
j l2ij term is the squared sum of the segment lengths of rays that
visit the ith cell. Thus cells that do not get visited frequently are given roughly the sameweight as frequently visited cells.
Example: One ray and only one slowness perturbation. Assume a single jth rayand a single slowness anomaly in the ith cell that leads to the traveltime residual δtj .Equation 4.18 reduces to
s(k+1)i = s
(k)i + αlijδtj/(lij2 + λ). (4.21)
This says that the slowness in the ith cell is updated by smearing the weighted jth residualδtj into the ith cell visited by the jth ray, where the weight is αlij/(lij2+λ) ≈ 1/lij for smallλ and α = 1. Thus, the slowness update δsi = δtj/lij makes sense because it accounts forthe traveltime residual strictly caused by the slowness anomaly in this ith cell. However,this residual is erroneously smeared along other cells visited by the jth ray, which hadthe correct slowness. Further iterations and more data (i.e., rays) are needed to correctfor these errors, and if we are lucky then the regularized preconditoned steepest descentmethod should converge to the correct answer.

4.3. SUMMARY 89
4.3 Summary
For most overconstrained systems of equations in seismic imaging no exact solution exists.The usual remedy is that seek a least squares solution that minimizes the sum of thesquared residuals denoted by ε = 0.5
∑i r
2i . In this case, the non-linear GN solution x(k+1) =
xk−H−1g(k), yields the Hessian given by H =∑M
i=1 Tiri + LT L, where Ti contains secondderivatives of the residuals and L contains the first derivatives of the residuals. Invokinga small residual assumption, the second derivative term is neglected, so that x(k+1) =xk − [LTL]−1LT δt.
If the LTL are poorly conditioned then many different models can account for the data,i.e., the solution is unstable. The partial remedy is to impose equations of constraint toregularize the system of equations. If the system of equations is highly inconsistent becauseof outlier errors in the traveltime picks then an l1 method can be used, otherwise known asreweighted least squares. In practice, the system of equations is usually too large to findthe direct inverse to LTL, so iterative solution methods are used, as discussed in Fletcher(1987), Gill (1981) and Nolet (1987).

90 CHAPTER 4. TRAVELTIME TOMOGRAPHY

Bibliography
[1] Bube, K., and Langan, R., 1994, A Hybrid l1/l2 minimization with applications totomography: Geophysics, 62, 1183-1195.
[2] Fletcher, R., l987, Practical Methods of Optimization: J. Wiley and Sons, NY, NY.
[3] Gill, P., Murray, W., and Wright, M., 1981, Practical Optimization: Academic Press,NY, NY.
[4] Groetsch, C., 1993, Inverse Problems in Mathematical Science: Vieweg Publ., Wies-baden, Germany.
[5] Nemeth, T., Qin, F., and Normark, E, 1997, Dynamic smoothing in crosswell traveltimetomography: Geophysics, 62, 168-176.
[6] Nolet, G., l987, Seismic Tomography: D. Reidel Publishing, Boston, MA.
[7] Zhang, J. and Toksoz, N., 1998, Nonlinear refraction traveltime tomography: 63, 1726-1737.
4.4 Appendix
A microscopic view of the bent raypath in Figure 4.8 would reveal a straight ray, where theassociated wavefronts are straight and perpendicular to this straight ray. In this microscopiczone, a small peeble or velocity inhomeogeneity appears as a limitless ocean of homogeneousvelcoity. Consequently, for really small wavelengths the wave equation is solved by the planewave solution eiω(kxx+kyy−ωt). At the point (x, y) and its small neighborhood the mediumis effectively constant c(x, y) = ω/k for very high frequencies f , i.e., small wavelengthsλ = c/f . Thus, the following dispersion relationship is true in this neighborhood:
k2x + k2
y = (2π/cT )2, (4.22)
where T is the period of the source wavelet. Recalling that kx = 2π/λx and ky = 2π/λy,where λx and λy are the horizontal and vertical apparent wavelenths, respectivey, equa-tion 4.22 becomes after multiplying by (.5T/π)2:
(T/λx)2 + (T/λy)2 = (1/c)2. (4.23)
91

92 BIBLIOGRAPHY
But, for a plane wave, T/λx = ∂t(x, y)/∂x and T/λy = ∂t(x, y)/∂y so that the aboveequation reduces to the eikonal equation:
(∂t(x, y)/∂x)2 + (∂t(x, y)/∂y)2 = (1/c)2. (4.24)
The eikonal equation is more compactly expressed as |∇t(x, y)| = 1/c(x, y), where ∇t(x, y)is the gradient of the traveltime field, which points perpendicular to the wavefront. We canreplace this compact representation by the directional derivative
|∇t(x, y)| = dt(x, y)/dl = 1/c(x, y), (4.25)
where the direction perpendicular to the wavefront is denoted by l and a small incrementalchange of raypath length along this direction is denoted by dl. Multiplying through by dland integrating the raypath length from the source to the observation point (x, y) yieldsthe traveltime integral:
t(x, y) =∫
raypathdl/c(x, y),
=∫
raypaths(x, y)dl, (4.26)
which is the modeling equation for traveltime tomography, a high frequency method forinverting the earth’s velocity distribution from measured traveltime data. Note that this isa non-linear integral equation with respect to slowness s(x, y) because both the integrandand raypath geometry depend on s(x, y).

Chapter 5
Basics of Seismic Exploration
The goal of exploration seismology is to find oil and gas reservoirs by seismically imagingthe earth’s reflectivity distribution. Towards this goal, exploration geophysicists performseismic experiments ideally equivalent to that shown in Figure 1. Here, the source excitesseismic waves, and the resulting primary reflections are recorded by a geophone locatedat the source position. If we assume only primary reflections then this defines the idealzero-offset (ZO) experiment. For now we assume a magic filter (to be described later asdata processing) that eliminates all events but primary reflections.
A seismic source is usually some mechanical device or explosive that thumps the earth,and a geophone records the time history of the earth’s vertical particle velocity, denotedas a seismic trace d(x, z = 0, t). Larger amplitudes on the Figure 1 traces correspondto faster ground motion and the up-going (down-going) motion is denoted here by theblackened (unblackened) lobes. The strength of these amplitudes is roughly proportional tothe reflectivity strength m(x, z) of the corresponding reflector. Assuming a constant densityand a 1-D medium , the reflectivity m(x, z) is roughly defined as as
m(x, z) ≈ v(z + dz)− v(z)v(z + dz) + v(z)
, (4.1)
where v(z) is the propagation velocity at depth z.After recording at one location, the source and receiver are moved a bit over and the
idealized ZO seismic experiment is iteratively repeated for different ground positions. Allrecorded traces are lined up next to one another and the resulting section is defined as aZO or poststack seismic section, as shown on the RHS of Figures 1 and 2. Note that thedepth d of the first reflector can be calculated by multiplying the 2-way reflection time t byhalf the velocity v of the first layer, i.e. d = tv/2.
The reflection section in Figure 1 roughly resembles the actual geology, where one side ofthe signal is colored black to help enhance visual detection of the interface. Unfortunately,this experiment and the ZO seismic section are ideal because they assume no coherentnoises such as multiples, out-of-the-plane scattering, surface waves, converted waves and soon. In practice, a real ZO experiment cannot generate the ideal seismic section becausethe source also generates strong coherent noise and near-source scattering energy. To solvethis problem, explorationists perform non-zero offset experiments (where one shot shotsinto many far-offset geophones), filter coherent noise from these data and make time-shiftcorrections to the traces so that they are roughly equivalent to the ideal ZO traces. Thesteps for processing these data are described in a later section.
93

94 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
Figure 4.1: Earth model on left and idealized zero-offset (ZO) seismic section on right,where each trace was recorded by an experiment where the source has zero offset from thegeophone. The above ZO seismic section represented by d(x, z = 0, t) roughly resemblesthe earth’s reflectivity model m(x,z) because we unrealistically assume it contains only theprimary reflections.

4.1. SEISMIC IMAGES OF THE EARTH 95
4 km
Seismic Section Road Cut
20 m
Figure 4.2: Geologic faults revealed by road cut on right and seismic section from a marineseismic survey. Seismic section (courtesy of Dave Lumley’s homepage) in the X-T planeshows faults denoted by dark solid lines. Distances are roughly estimated by double-sidedarrow.
4.1 Seismic Images of the Earth
Seismic images can reveal remarkable pictures of the earth’s subsurface geology. Suchpictures can be used to understand and identify faults at deep depths, and therefore helpus identify the location of oil and gas deposits. Figure 4.2 shows some seismic pictures offaults taken by optical and seismic cameras. The explorationist is keenly interested in suchfaults because the lighter-than-water oil+gas will flow along a layer towards a topographichigh until it is stopped by some permeability barrier such as a fault. There it accumulatesin large reservoirs, waiting to be found by the explorationist with the most capable seismiccamera.
A fault is not a sufficient condition for a hydrocarbon reservoir, so one must look foradditional hydrocarbon clues in the seismic image. Such clues can sometimes be found inthe brightening of the reflection amplitude. Gassy marine sandstones will typically reflectmore energy than non-gas sands, so a gas can reveal its presence by a large amplitude brightspot in the seismic section. A bright spot example from the Gulf of Mexico is shown inFigure 3 where the gas-sand reflection is much ”brighter” than the surrounding reflections.This brite spot technology represented one of the technological breakthroughs in the 1970’sthat led to a significant increase in the hydrocarbon discovery rate in the Gulf of Mexicoand other marine environments.
Another breakthrough in seismic exploration, 3-D reflection experiments, came aboutwith the advent of fast computers in the mid-1980’s. Instead of just placing geophones andsources along the same line, 3-D seismic experiments distribute geophones and sources on alarge 2-D patch of ground. A large 2-D grid of geophones is activated for each source locationso that 3-D seismic scattering from out-of-the XZ plane could be properly accounted for to

96 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
Bright Spot Gulf of Mexico1 Mile
1.0
2.0
Tim
e (s
)
Figure 4.3: Bright spot, or large seismic amplitude in the seismic section indicating a largereservoir of gas. Vertical axis is in seconds, and 1 second indicates a depth of about 5,000feet (courtesy of Conoco).
reveal geologic complexity in unprecedented detail. An example is given Figure 4.4, wherea 3-D reflectivity cube of data is sliced horizontally to reveal a meandering river channelat a depth of more than 16,000 feet!. River channels can make oil geologists gush withexcitement because they contain highly porous sands that can quickly sop up vast pools ofmigrating hydrocarbons.
4.2 Seismic Experiment
In practice the ZO shooting geometry shown in Figure 1 does not produce useful resultsbecause the signal/noise (S/N) ratio is too low. This is in part due to the very weak zero-offset reflections , strong coherent noise, and strong scattering (?) noise near the source. Tosuppress these noises, the seismic reflection experiment is designed to record arrivals thatare offset from the source position, as shown in Figure 4.5. This figure shows a 2-D recordinggeometry where the source shoots into a 1-D recording line of receivers or geophones, andthe resulting reflections are recorded by the recording truck. This is referred to as a 2-Drecording line because the reflections are assumed to emanate only along the vertical XZplane coincident with the recording line. The length of the recording line is sometimesreferred to as a cable length.
4.2.1 Seismic Sources
There are many types of seismic sources, but the most often used sources for land surveysare vibrator trucks (see Figure 4.6), and for marine surveys are air guns. Vibrator trucks

4.2. SEISMIC EXPERIMENT 97
Figure 4.4: Seismic 3-D image cube XYZ space showing a horizontal XY slice of a mean-dering river channel at a depth of more than 4 miles. The color variations correspond tovariations in reflectivity. This picture might look similar to an airplane view of the groundif you flew over the Mississippi River at a 20,000’ elevation. The ability to ”seismically see”within the earth to depths of many miles is one of the great technological achievements ofthe 20th century (modified from Dave Lumley’s homepage)!

98 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
RecordingTruck
Geophones
Figure 4.5: Typical shooting geometry for a 2-D end-line seismic experiment, where theshot is at one end of the spread. After excitation of the shot, the stations and shot aremoved by the same amount and the experiment is iteratively repeated.
continuously shake the ground, starting from a low frequency rumble at about 5 Hz andthen progressively sweep to higher frequencies up to 150 Hz. The sweep time ranges from20 s to 40 secs or so, and the recorded signal is crosscorrelated with the vibrator truck signalto produce an impulsive source wavelet.
4.2.2 Recording Equipment
Typical exploration surveys lines record from 48 to over 1000 channels of data per shot,where there might be anywhere from 50 feet to over 300 feet between takeouts or geophonestations. To avoid spatial undersampling or aliasing, the shot intervals and the takeoutdistances are usually no more than 1/2 the wavelength of your important reflection events.However, economic considerations prevent this ideal shot or receiver interval from beingfully realized in most 3-D surveys. See Figure 4.7 for views of the recording box, geophonesand the source used in a recent Moab, Utah experiment that searched for clues to a largemeteorite impact. The bottom photo in Figure 4.8 depicts geophones used in the sands ofSaudi Arabia.
To increase the signal-to-noise, at any one takeout station there may be many geophones(from 6 to over 48 in a group) connected in series to one another so that the summed signalis linked to one channel in the multi-channel recording cable. Similarly, there may be severalsources spaced out so as to cancel the surface waves or ground roll (see top right picture inFigure 4.6. If the group length (i.e., maximum separation between any two geophones in agroup) is about the same as the wavelength of the surface wave, then the serial geophones ina group tend to cancel the short wavelength surface waves while passing the long wavelengthreflected waves.

4.2. SEISMIC EXPERIMENT 99
Land Vibroseis Marine Vibroseis
Elastic Wave Generator Inexpensive SH Source
Figure 4.6: Typical land and marine sources. Vibroseis truck above is workhorse of landsurveys, where truck lifts up on center pad and vibrates up and down for about 20-40 secsper station. Sometimes 5 or more trucks vibrate simultaneously, and are evenly spread outover an interval equal to the wavelength of a surface wave so that the groundroll is canceledby destructive interference. Air guns are the preferred source for marine surveys; EWGsource and muscle power are the preferred cost-effective sources for U of Utah surveys.

100 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
Geophone String 48−Channel Recorder
Figure 4.7: Receiver cables and Bison recording instrument.
Geophone Desert Field Camp
Figure 4.8: Sand geophones and groups (72 phones/group) of geophones used in SaudiArabia.

4.2. SEISMIC EXPERIMENT 101
4.2.3 Common Shot Point Gathers
The traces recorded by a single shot are grouped together to form a common shot gather or CSG,as shown on the LHS of Figure 4.9. Note that the R2 reflection times increase with an in-crease of source-receiver offset, and these reflections are readily identified for source-receiveroffsets greater than 60 feet. Near the zero-offset locations these reflections are buried bynear-source noise.
75.00.0 75.00.0
dx/dt=1.4 km/s
dx/dt=1.0 km/s
SurfaceWaves
dx/dt=0.3 km/s
R2
Ref. 1
Ref 1
Ref. 1
R2
D
R2Ref.R2
1.0
0.0
X (m)X (m)
Tim
e (s)
Figure 4.9: Common shot gather on left and skeletonized version depicting arrival travel-times vs X for the direct (D), Refracted (Ref1) and Reflected (R2) arrivals. The apparentvelocities dx/dt of these arrivals can be measured from the x-t graph. CSG data collectedalong W. Valley Fault, Utah,
To cover a greater subsurface area with reflection events, the shot and geophone locationsare translated (or rolled along) by the same distance and the CSG experiment is repeatedto give another shot gather. These experiments are repeated along a line until sufficientsubsurface coverage has been achieved. It is usually necessary to have a long recording line sothat 1). the noise near the source is avoided, 2). the surface wave amplitude has diminishedor the slow surface waves arrive much later than the reflections, 3). the moveout trajectoryof the reflection events is sufficiently distinguished from coherent noise trajectories so thatprocessing (i.e., stacking) removes the noise, and 4). there is better spatial resolution in theseismic image. The seismic camera is similar to an optical camera, where wider aperturesresult in better image resolution.
In Figure 4.9, the non-zero offset reflections arrive later than the ideal zero-offset reflec-tion. Therefore, to realize the goal of obtaining an ideal ZO section we must apply timeshifts to the non-zero offset reflections to correct them to zero-offset time. To do this wemust reorganize the data into a common midpoint gather (CMG) as explained in the nextsection.

102 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
4.2.4 Common Midpoint Gathers
The CSG data are reorganized so that they are in the form of common midpoint gathers,where any trace in a CMG has the same source-receiver midpoint as any other trace in theCMG.
A CMG collected along the Oquirrh Fault, Utah is shown in Figure 4.10. Here themidpoint xm and half-offset xh coordinates in a CMG are related to the source xs andgeophone xg coordinates in a CSG by
xm = (xg + xs)/2 ; xh = (xg − xs)/2. (4.2)
The beauty of the CMG is that each trace contains reflection energy that sampled the samepart of the reflector as the other traces in the CMG. As an example, the R3 reflection eventsalong the R3 hyperbola in Figure 4.10 all emanated from apex of deepest raypath shownin this figure. This redundancy will be exploited (as discussed later) by stacking theseredundant reflections together to increase the S/N ratio of the seismic record. In contrast,the R2 reflections in the CSG in Figure 4.9 emanate from different parts of this reflectorand so do not redundantly sample the R2 reflector.
Figure 4.10: Similar to previous figure, except 1). traces in CSG’s are reorganized into aCMG, and 2). the above data were collected along Oquirrh Fault, Utah. Note, each rayshown above is connected with a source-receiver pair, and all such pairs share the commonmidpoint location denoted by the filled square box. The thick hyperbolic lines describe themoveout curves for primary reflections.
Figure 4.11 depicts the rays and traces associated with CSG’s and CMG’s. Note, allof the common midpoint (CMP) rays in the second to the bottom graph in Figure 4.11emanate from the same reflection point.
The number of traces in a CMP gather defines the fold of the data. For example, thetotal number of traces in Figure 4.10 define the fold number. Large fold data means we

4.2. SEISMIC EXPERIMENT 103
have redundantly sampled a subsurface reflection point many times, so that after stacking(explained below) we will most likely have a stacked trace with a good S/N ratio.
Figure 4.11: (Top 2 graphs) CSG’s and associated rays. (Bottom 2 graphs) CMG seismo-grams and rays associated with a common midpoint in the 2-layer model.
The next step in order to realize the goal of ideal ZO data is to apply time shifts (i.e.,Normal Moveout (NMO) corrections to be discussed in the next section) to the traces in aCMP gather to correct them to the zero-offset reflection time. These corrected traces in theCMG are then added together (i.e., stacked) to produce a stacked trace with a large S/Nratio. Presumably, most of the coherent noise can be eliminated by this stacking processbecause the time shifts only aligned the reflections with one another so that only the primaryreflections coherently added together after stacking.
4.2.5 Apparent Velocity
We are almost ready to begin processing the CSG data to achieve the goal of obtaining theideal ZO section. But first we explain the useful idea of an event’s moveout velocity. Amoveout velocity can be used to distinguish reflection events from coherent noise such assurface waves or multiples.
Figure 4.10 depicts arrivals that moveout from the source position with offset. Theapparent velocity vx in the x direction of an arrival can be computed by measuring theslope vx = dx/dt of that event’s arrival time curve t(x), as shown on the RHS of Figure 4.9.Arrivals with a large apparent velocity and having a hyperbolic moveout curve are usuallyreflection events. For example, a 2-layer flat medium with a first layer velocity of v and aninterface depth of d would see the traveltime equation for the primary reflections as
t(x) =√
4d2 + x2/v
=√t(0)2 + x2/v2 (4.3)

104 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
where t(0) = 2d/v is the 2-way vertical traveltime to the reflector at depth d. This equationdescribes a hyperbolic curve and characterizes the hyperbolic trajectory of reflection eventsseen in Figure 4.9 or 4.10.
4.2.6 RMS Velocity
If the homogeneous medium is replaced by a stack of horizontal layers then the traveltimeequation can be replaced by a series expansion in the offset coordinate:
t2(x) = C0 + C1x2 + C2x
4 + ... , (4.4)
where C0 = t(0)2, C1 = 1/v2RMSN
, and the other coefficients are complicated terms. Here,the RMS velocity vRMSN
for the stack of N layers is defined by
v2RMSN
≈∑N
i v2i ∆ti∑N
i=1 ∆ti, (4.5)
where ∆ti is the vertical 2-way time through the ith layer, and t(0) in equation 4.3 becomesequal to
∑Nk=1 ∆ti the 2-way vertical traveltime to the Nth layer. Note that vRMSN
dependson the the number of layers N , so we say that the Nth reflector has a different vRMSN
valuethan, say, the N − 4 reflector.
Plugging equation 4.5 into 4.4 and truncating after 2 terms yields the traveltime equationfor short offsets and a multilayered media:
t(x) =√t(0)2 + x2/v2
RMSN. (4.6)
The approximation in the above equation is valid for small values of offset x (Yilmaz, 1987).Once the vRMSN
velocity is found for each reflector then the interval velocities vi can befound by the Dix formula:
V 2RMSn
=v2RMSn
t(0)n − v2RMSn−1
t(0)n−1
t(0)n − t(0)n−1, (4.7)
where t(0)n denotes the vertical reflection traveltime to the nth layer. The validity of thisformula is easily proven by using the definition of vRMSN
and simple algebraic manipulation.In summary we have learned some new words.
1. STATION: Recording site connected to a group of geophones. Data from this site istransmitted along one channel in recording line.2. GEOPHONE Group: Geophones serially connected, and summed signal is fed to onechannel.3. SPREAD LENGTH: Length of recording line.4. ZO SECTION: Seismic traces obtained by recording seismic energy with a geophonethat has zero offset from the source.5. CSG: Common shot gather of traces recorded with a common shot.6. CMG: Common midpoint gather of traces where each of the traces have the samemidpoint position between the shot and receiver.7. SHOT AND GROUP INTERVALS: Intervals between shot points and stations.

4.3. BASIC PROCESSING STEPS 105
8. APPARENT VELOCITY: Velocity of an arrival as measured along a horizontal line.9. ENDLINE AND MIDPOINT RECORDING GEOMETRIES: Shot at end of recordingline = endline. Shot at midpoint of recording line = midpoint.10. The fold number is the number of traces in a CMG. It is the number of traces in agather with a common reflection point.
4.3 Basic Processing Steps
Some basic processing steps are needed to obtain ZO sections from CSG’s.
4.3.1 Automatic Gain Control to Correct for Geometrical Spreading+AnelasticLosses.
The seismic amplitudes are usually strongest nearest the source and at early times. Conse-quently, the raw records usually show very weak or non-existent reflections at the far-offsettraces. To display these important signals we gain the data in some fashion. This gainprocedure can be a combination of several methods:
• Backing out the geometric spreading by multiplying each trace with the reciprocal ofthe geometric spreading factor v(t) ∗ t, where v(t) is velocity at time t and t is the2-way traveltime. The attenuation can also be backed out by multiplying the tracewith e|α|t, where α is the attenuation constant.
• Automatic gain control (AGC) of the data. Here the data within a specified timewindow is gained to a constant energy level. The window is slid down the trace so theenergy is equilibrated. Shorter windows boost everything while longer windows tendto show true relative amplitudes.
%% MATLAB 5.0 script for applying AGC to CSG traces in a CSG.% For each trace, the energy within a moving window of length% np is computed and the sample in the center part of this window% is divided by this energy.%% data(x,t) - input - nx x nt CSG matrix% np - input - length of AGC window% out1 - output- traces with AGC applied%[nx,nt]=size(data);inn=[fliplr(data(:,1:np)) data fliplr(data(:,nt-np:nt))];inn=inn.^2;f=ones(np,1)/np;out=conv2(inn,f’);start=round(np+np/2);endd=start+nt-1;outt=out(:,start:endd);out1=data./(sqrt(outt)+.000001);

106 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
0.00.0
0.0 1000.45 0.45
Tim
e (s
)
Tim
e (s
)X (m)X (m)
Raw CSG Muted CSG
0.0 100
Figure 4.12: CSG seismograms before and after muting of data before first arrival.
4.3.2 Muting.
We use a brute force mute to eliminate events that are not coincident with our belovedprimary reflections, e.g., surface waves that arrive earlier than reflections. Figure 4.12depicts a shot gather before and after muting.
4.3.3 Bandpass Filter Data to Remove Noise.
If the noise and signal are separated in the temporal frequency domain, then bandpassfiltering can applied to the traces to remove such noise. Strong noise might be low-frequencysurface waves, 60 Hz electrical noise, wind noise, mechanical noise from human environment,cows or sharks munching on cables, etc..
As an example, Figure 4.13 depicts a shot gather before and after 50-280 Hz bandpassfiltering. Much of the low frequency groundroll (i.e., surface waves) has been eliminated toreveal many reflection events with pseudo-hyperbolic trajectories.
4.3.4 Static Corrections to Remove Elevation and Near-Surface Hetero-geneities.
A major goal of reflection processing is to provide reflectivity images of the correct reflectorgeometry. This goal can be thwarted by the statics problem. The statics problem is definedto be static time shifts introduced into the traces by, e.g., near-surface velocity anomaliesand/or topography. These time shifts distort the true geometry of deep reflectors.
As shown in Figure 4.14, an undulating topography can produce moveout delays in theCSG that can also be interpreted as undulations in the reflector, even if the reflector is flat.After an elevation statics correction (i.e., time shifts applied to traces) the data appear tohave been collected on a flat datum plane. Figure 4.14 shows that static shifts can also be

4.3. BASIC PROCESSING STEPS 107
0.00.0
0.0 1000.45 0.45
Tim
e (s
)
Tim
e (s
)X (m)X (m)
Raw CSG Bandpass CSG
0.0 100
Figure 4.13: CSG seismograms before and after 50-280 Hz bandpass filtering. The lowfrequency surface waves have been suppressed.
introduced by near-surface velocity anomalies which usually delay the traveltimes, resultingin reflections having a non-hyperbolic moveout curve.
Static shifts introduced by topographic variations fall under the class of field statics, andthose due to near-surface lithological variations that occur within a cable length fall underthe class of residual statics. Correcting for static shifts in the traces can make a significantdifference in the quality of a migrated or stacked image. It is easy to determine elevationstatic corrections, but not so easy to find the residual static corrections. One means is todetermine the near-surface velocity distribution by refraction tomography, which will bediscussed later.
4.3.5 Velocity Filter Data to Remove Surface Wave Noise.
Events with a slow moveout velocity (1000-4000 ft/s) are typically unwanted noise such assurface waves. Their velocity is usually well separated from the apparent velocity of deepreflections so we can filter them out in a domain in which they are well separated from oneanother, namely the FK (i.e., frequency-wavenumber) domain.
As an example, assume the data d(x, t)
d(x, t) = δ(x− vslowt+ x0) + δ(x− vfastt+ x′0), (4.8)
consist of two linear events, one moving out with a slow velocity vslow and the other witha fast velocity vfast. The x−intercepts are denoted by x0 and x′0.
In the (x, t) domain the two linear events cross one another and so it is difficult to muteone entirely from the other. However, under an FK Fourier transform the above equationbecomes:
d(k, ω) = aδ(kvslow − ω) + bδ(kvfast − ω), (4.9)

108 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
CSG with Statics Corr.CSG with Statics
Datum
StaticsResidual
Figure 4.14: (LHS) Elevation static correction applied to CSG traces to correct data sothat it appears to have been shot on a level datum plane. Still, there is a residual staticcorrection which must be removed to correct for the low-velocity pod.
Jitter Refl.
Jittery Reflections
Jittery Reflections
Common Midpoint Gather0.0
0.4
Tim
e (s
)
Figure 4.15: CMG collected over the Oquirrh fault, Utah where the jitter in the reflectionsat depth is due to near-surface velocity variations. These jitters must be corrected prior toNMO correction and stack.

4.3. BASIC PROCESSING STEPS 109
0.0
0.0 1000.45
Tim
e (s
)
Tim
e (s
)X (m)X (m)
Raw CSG0.0
0.0 1000.45
FK Filtered CSG
Figure 4.16: CSG seismograms before and after FK velocity filtering to eliminate surfacewaves.
where a and b are phase terms. It is clear the transformed data describe two slanted linesthat do not cross each other except at the origin. Thus muting one line from the otherbased on their different slopes (i.e., velocities) is trivial in the FK domain.
The above procedure is called velocity filtering. As a field data example, Figure 4.16shows a CSG before and after velocity filtering to remove the steep surface waves.
4.3.6 Normal Moveout Correction to Align Offset Reflections with ZOReflections.
The CMG traces in Figure 4.10 are misaligned with one another so that a brute stack willproduce cancellation of the signal. To avoid this cancellation we flatten out the reflectionsby using equation 4.6 to apply a normal moveout (NMO) time shift tNMO(x) to the data,where
tNMO(x) = t(x)− t(0),
= t(0)[√
1 + (x/vNMOt(0))2 − 1], (4.10)
and we have replaced the vRMS by vNMO. Once flattened, the traces in a NMO-correctedgather can be stacked together for constructive reinforcement of the reflection events.
But how do we in practice determine the vNMO values? A systematic means for deter-mining Vnmo is described in the next section on velocity analysis.
The MATLAB script for NMO corrected data is given below:
%% data(x,t) = CMG data% datanmo(x,t) = CMG data with NMO correction% t0 = 2-way normal incidence time

110 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
0.00.0
Tim
e (s
)
4.50.0 2.0X (km) 0.0 2.0X (km)
4.5
Tim
e (s
)
GOM CMG CMG after NMO
Figure 4.17: Mobil’s Gulf of Mexico CMG before and after NMO correction. Note, theabsence of surface waves (why?) and the cleaner appearance (no static problems) of thesemarine records compared to the messy land data from Utah. Marine data, typically, arecheaper to acquire and cleaner than land data. The primary problem with marine data,however, is usually the presence of sea-floor multiples.
% v(t0) = Stacking velocity as a function of 2-way normal incidence time%for x=1:nx;for t0=1:nt;tx = sqrt(t0^2+(x*2/v(t0))^2);datanmo(x,t0) = data(x,tx);
end;end;
Application of a script like this to the LHS of Figure 4.17 will ”flatten” the primaryreflections to give the NMO corrected traces shown on the RHS.
4.3.7 Velocity Analysis to Determine Vstack.
Figure 4.18 illustrates the procedure for automatically determining the stacking/NMO ve-locities from the CMG. Here, CMG amplitudes are summed together along different hyper-bolas described by the traveltime equation 4.6. The summation is carried out for differentvalues of (t0, VNMO), and the result is contoured in (t0, VNMO) space (see the RHS of Fig-ure 4.18). The correct values of (t0, VNMO) will describe an hyperbola that coincides withthe reflection event to give a large summation value; otherwise the summation values (orsemblance) are small. The summation value is called a semblance value because we reallysum over a thick hyperbolic line, weight the summation with a normalization factor, andinsure positive summation values by taking the absolute value of the sum.
Identifying the bullseyes on the RHS of this figure, and connecting lines between these

4.3. BASIC PROCESSING STEPS 111
stackV3 km/s 6 km/s
CMP Panel Velocity Semblance Panel
X (km) X (km)
Semblance
T (
s)
T (
s)
o
Figure 4.18: CMG panel and corresponding semblance panel. There are 2 groups of re-flection events, one corresponding to reflections from a shallow reflector with a velocity ofabout 5,000 ft/s, and the other from a deeper reflector with a moveout velocity of about10,000 ft/s. Note that the bullseyes in the semblance panels correspond to the correct T0and NMO velocities.
bullseyes describes the optimal vNMO vs t0 curve. The vNMO can also be thought of as thestacking velocity for a layered medium, and is considered to be good estimate of vRMS .
4.3.8 Stacking to Remove Coherent+Random Noise.
The NMO corrected data in a CMG are now ready to be summed together to form thestacked trace. The MATLAB code for stacking traces in a CMG is given below:
for x=1:nx;for t0=1:nt;trace(t0) = trace(t0) + datanmo(x,t0);
end;end;
One problem that arises with NMO corrected data is the phenomenon of ”stretch”, wherethe far-offset NMO-corrected traces are stretched to a wider frequency. If the stretching istoo severe then you just mute such traces prior to stacking.
After stacking the traces in a CMG you get a single stacked trace of your seismic section.Placing all of the stacked traces next to one another provides you with a poststack or ZOseismic section similar to that shown in Figure 4.2. Note that using a stacking velocitytuned to the reflections allows you to reinforce the reflection energy and partly suppress thecoherent noise such as surface waves, multiples, etc.. Thus, the ideal ZO section containingonly primary reflections is more closely realized.

112 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
T
VT
Actual Reflection Points
ApparentReflection Points
Poststack Migration Circles
Figure 4.19: For a dipping layer, projecting reflection energy directly to a depth of vt belowa trace defines the apparent reflection point, which is not the same as the actual reflectionpoint. Thus the stacked section d(x, z = 0, t) is not a good approximation to m(x, z) forcomplex structures or layers with steep dip. Here t is the 1-way reflection time.
4.3.9 Poststack Migration to Go from Data Space to Model Space.
Zero-offset seismic traces (x, z = 0, t) do not provide an accurate picture of the subsurfacelayers when there is a great deal of structural complexity. For example, Figure 4.19 showsthat the apparent reflection point deduced from our traces does not coincide with the actualreflection point in which the reflection energy originated.
The inability of d(x, z = 0, t) to represent the seismic section gets even worse when yourreflector becomes more complex as shown in Figure 4.20. For example, the faults in thedata have diffraction tails which are collapsed in the migrated section. To correct for thesedistortions we apply the operation of migration to the zero-offset seismic data to producean image m(x, z) of the reflectivity section in (x, z).
Formally, if L is the forward modeling operator so that
d = Lm, (4.11)
then migration can be described as the first iterate of a steepest descent method:
m = [LTL]−1LTd,
≈ LTd. (4.12)
The migration algorithm will be explained in detail by other speakers. In fact, migration ofthe prestack data (i.e., CMP traces) is now commonly used today to improve the imagingquality even more.Question: Why is LT such a good approximation to L−1?

4.4. SUMMARY 113
Answer: If the data d = Lm roughly resemble m, then this suggests that L acts almostlike an identity operator in mapping model space to data space. Thus, LT might act likean inverse operator. Also, [LTL] is somewhat diagonally dominant so that its inverse canbe roughly approximated by a weighted diagonal matrix.
0.0
X (km)
0.0
X (km)
Stacked Data Migration Image
Dep
th (
km)
Tim
e (s
)
2.2 2.50.0 0.75 0.0 0.75
Figure 4.20: Poststack migrated image and stacked seismic section. Note how the faultsare more clearly delineated and the diffraction frowns are collapsed in the migrated section.Data are computed for the SEG/EAGE synthetic overthrust model.
4.4 Summary
The goal of exploration seismologists is to obtain the reflectivity model of the earth. This ispartly achieved by collecting non-zero offset seismic data in the format of CSG’s, reorganiz-ing them into CMG’s, filtering these data, applying static and NMO time shifts to correctthese data to the ZO time, and stacking to get the poststack seismic section. The stackingprocess is the most powerful step in eliminating both coherent and random noise. For thisreason and to also increase spatial resolution, offset traces with source-receiver offsets outto more than several miles are not uncommon and sections with more than 100 fold arealso used. To get an even better approximation to m(x, z) the migration operator LTd isapplied to these data.
Assumptions implicit in the data processing include:
• Data are largely governed by the acoustic isotropic wave equation, where densityvariations are weak.
• Primary reflections only in the stacked section. This means that the processing haslargely eliminated coherent noise such as multiples, converted PS reflections, surfacewaves, etc..

114 CHAPTER 5. BASICS OF SEISMIC EXPLORATION
• Velocity distribution is known in order to properly migrate data. Velocity semblanceanalysis usually does a pretty good job for geology that is not too complex.
• No reflection events originate from out-of-the-recording plane are in the data. Other-wise 3-D data should be collected and processed in a 3-D fashion.
4.5 References
Yilmaz, O., 1987, Seismic Data Processing: SEG Publishing, Tulsa, Ok.

Chapter 6
Practical Aspects of Diffraction StackMigration
The basic assumption in resorting shot gathers into common midpoint gathers, applyingNMO and stacking is that the reflectors are flat. If true, the origin of the stacked reflectionenergy originates somewhere directly beneath the trace, as shown in Figure 6.1. However,layering that departs from the horizontal, such as the dipping layers shown in Figure 6.2-6.3, violates this assumption. The consequence is that the reflection energy in a trace couldhave originated along a reflector point horizontally offset from the trace. Thus we need to”migrate” the reflection to its point or origin, a process commonly known as migration. Notdoing so will lead to mispositioning errors in estimating oil location and result in many dryholes.
Another reason for ”migration” is that sharp changes in the interface geometry give riseto diffractions. Examples are a point scatterer and a synclinal model giving rise to the ZOsections shown in Figure 6.4. Without migration, the point scatterer traces appear as ifthey were generated by a synclinal structure.
6.1 Poststack Migration
The goal in seismic imaging is to use seismic data to create reflectivity sections of the earthin either (x, z) or (x, y, z) space. If the reflection traces are all we have, how do we identifyin (x, z) the origin point of reflections and migrate them to their reflection point of origin?The answer to this question for a dipping layer is shown in Figure 6.3. The reflection energyat time t in trace C could have originated anywhere along a circle of radius vt centered atC, where v is the homogeneous velocity of the medium. Any reflector located along thiscircle could have contributed energy to trace C at time t. However, this ambiguity in lo-cation is not acceptable, so we improve our answer by asking the question: what kind ofreflector could account for all the traces? The answer is found by drawing circles of radiusvt centered at all trace positions, where t is the reflection time at that particular trace. Thecommon tangent to these circles defines the reflector that could account for energy seen inall of the traces.
115

116 CHAPTER 6. PRACTICAL MIGRATION
6.1.1 Poststack Migration = Smear d(xg, t) along Semicircle(x, z)
Rather than drawing circles, the migration procedure can be automated by smearing reflec-tion energy along fat circles where each donut is filled with the reflection wavelet w(t), asshown in Figure 6.5. The areas where the adjacent donuts cross are likely to be out of phase,so that if the reflection energy is smeared and summed in model space coordinates (x, z)then destructive interference is likely to result within the intersections. However, alongthe common tangent (i.e., the actual reflector) the energy is in phase and so summation iscoherent. Thus, migration can be described as smearing and summing the reflections alongthe appropriate donuts (Stolt and Benson, 1986; Claerbout, 1996).
Mathematically, ZO migration is given by the formula (see previous chapter on Green’sfunctions):
m(x, z) =ntraces∑
g=1
data(xg, t(xg, x, z))/||(x− xg)2 + z2||2,
where
t(xg, x, z) =√
(x− xg)2 + z2/c, (6.1)
where t(xg, x, z) is the one-way time for energy to go from the surface point (xg, 0) to themodel point (x, z), and data(xg, t) is the reflection ZO trace in one-way time at position(xg, 0). The double dot denotes second-order differentiation with respect to time, which isto undo the smoothing effects of integration in the data-space x′ coordinate. Since phasechanges mainly determine the constructive/destructive interference of energy, I will usuallyignore the geometrical spreading factor in my later formulations.
This procedure can be automated with the following MATLAB fragment for ZO migra-tion;
for ixtrace=1:ntrace; Loop over ZO trace indiciesfor xs=istart:iend; Loop over model space indicies (xs,zs)for zs=1:nz;
r = sqrt((ixtrace*dx-xs*dx)^2+(zs*dx)^2); compute radius of semi-circletime = round( 1 + r/c/dt ); compute 1-way time to circlem(xs,zs) = m(xs,zs) + data(ixtrace,time)/r; Smear and sum data reflections into (x,z)
end;end;
end
Note, the data in data(ixtrace, time) are assumed to be in one-way time, otherwise thevelocity v would have to be halved.
6.1.2 Inhomogeneous Velocity
An implicit assumption in the above procedure is that the velocity medium is homogeneousso that possible reflector positions fall along a semi-circle. More realistically, the earth has a

6.1. POSTSTACK MIGRATION 117
Figure 6.1: Earth model on top left and idealized zero-offset (ZO) seismic section on topright, where each trace was recorded by an experiment where the source has zero offsetfrom the geophone. The above ZO seismic section represented by data(x, z = 0, t) roughlyresembles the earth’s reflectivity modelm(x, z) because we unrealistically assume it containsonly the primary reflections and the reflections in the data originate directly beneath thetrace.
Tsx
Tsx
Tgx
Tgx
Tgxs
Tgxs
Non-ZO TraceZO Trace
❇ ❇▼ ▼
+
Ellipse
Figure 6.2: Raypaths and associated CMP traces for a 2-layer medium. Note that thereis no common reflection point associated with these rays, and so the 1D NMO formulaincorrectly predicts the moveout of the reflection data. The subsequent stack will notproduce the correct ZO trace illustrated on the left.

118 CHAPTER 6. PRACTICAL MIGRATION
VT
TIME (
S)DE
PTH
(M)
2T
Reflection Points
Actual Reflection Points
Apparent
C
POSTSTACK DATA
Figure 6.3: Where could the reflection energy in trace C have originated from? Answer:Along the semi-circle with radius c · t centered at C. Where could the reflection energy haveoriginated for all of the traces? Common Answer: the tangent to the semi-circles which isthe dipping interface. Note, migrated energy always moves updip of the reflection energyseen in the seismic section and actual dip is steeper than apparent dip seen in seismicsection.
heterogeneous velocity distribution so that energy should fall along a irregular circle shownat the bottom of Figure 6.5. The quasi-circles can be computed by first using ray tracingto construct the traveltime table t(x, z, ixtrace) for a source at (ixtrace, 0); that is, findthe 3D matrix t(x, z, ixtrace) for all model coordinates (x, z) and trace offsets (ixtrace, 0).Then, replace time = round(1 + r/c/dt) in the above MATLAB code by t(x, z, ixtrace).
6.1.3 3D Poststack Migration = Smear d(xg, t) along Hemisphere(x, z)
Instead of a line of ZO traces, a 3D section will contain an areal patch of ZO traces. Themotivation for 3D recording is that the reflection energy could have originated anywherein the subsurface, even away from the vertical plane along the 2D recording line. That is,out-of-the-plane reflections could have been recorded. To migrate these out-of-the-planereflections to their origin point we should smear+sum reflection energy along semispheresrather than semicircles (see Figure 6.6). The change to the MATLAB code is to includeextra loops over the model- and data-space y-axes.
3D MATLAB Poststack Migration Code
for ixtrace=1:ntrace; % Loop over ZO trace indiciesfor IYTRACE=1:ntrace;for xs=istart:iend; % Loop over model space indicies (xs,ys,zs)for zs=1:nz; for YS=1:ny;r = sqrt((ixtrace*dx-xs*dx)^2+(IYTRACE*dy-YS*dy)^2+(zs*dx)^2); % compute radius of
% hemi-sphere

6.1. POSTSTACK MIGRATION 119
−0.5
0
0.5
1
X−offset (m)
Dep
th (m
)
Poststack Migration Image
0 200 400 600 800 1000 1200 1400 1600 1800
0
500
1000
1500
0
2
4
6
8
10
Offset (m)
Tim
e (s
)
Poststack AGC Data in 1−Way Time
0 200 400 600 800 1000 1200 1400 1600 1800
0
0.2
0.4
0.6
0.8
1
Student Version of MATLAB
0
5
10
15
20
Offset (m)
Tim
e (s
)
Poststack AGC Data in 1−Way Time
0 200 400 600 800 1000 1200 1400 1600 1800
0
0.2
0.4
0.6
0.8
1
−2
−1
0
1
2
3
X−offset (m)
Dep
th (m
)
Poststack Migration Image
0 200 400 600 800 1000 1200 1400 1600 1800
0
500
1000
1500
Student Version of MATLAB
Figure 6.4: ZO traces and model generated by reflections from a (top 2 images) pointscatterer and (bottom 2 images) synclinal model denoted by white dashed lines. Migrationimage in red and blue colors is shown as well.

120 CHAPTER 6. PRACTICAL MIGRATION
Destructive Interference
C
TIM
E (S
)D
EPTH
(M)
2T
POSTSTACK DATA
InhomogeneousVelocity
C
TIM
E (S
)D
EPTH
(M)
2T
POSTSTACK DATA
Figure 6.5: Fat migration ”circles” for a (top) homogeneous and (bottom) an inhomogeneousvelocity medium. The source wavelet fills in the fat ”circles”.

6.1. POSTSTACK MIGRATION 121
Non−ZO Trace
Prestack Migration Ellipsoid
*
ZO Trace
Poststack Migration Hemisphere
*
Figure 6.6: (Top) Poststack and (bottom) prestack migration impulse responses for 3Ddata.
time = round( 1 + r/c/dt ); % compute 1-way time to circlem(xs,YS,zs) = m(xs,YS,zs) + data(ixtrace,IYTRACE,time)/r; % Smear and sum data
end % reflections into (x,z)end;end;
endend
Note that there are almost twice as many end statements in the 3D code compared to the2D code, which means that 3D ZO migration is several orders of magnitude more expensivethan 2D ZO migration.
6.1.4 Obliquity Factor
An improved poststack image can be obtained by including an obliquity factor in the diffr-cation stack equation:
m(x, z) =ntraces∑
g=1
data(xg, t(xg, x, z))n · r/||(x− xg)2 + z2||2, (6.2)
where n is the unit normal at the surface and r is the unit vector at the surface that is theincidence angle of the reflection ray between the trial image point and the geophone.

122 CHAPTER 6. PRACTICAL MIGRATION
6.2 Prestack Migration
In a complex medium, such as beneath a salt dome, the NMO and stacking assumptionis inappropriate so that the stacked section is too blurry to focus by poststack migration.The cure to this problem is to eliminate the NMO and stacking steps and perform prestackmigration on the shot gather d(xg, 0, tg|xs, 0, ts), where xg and xs denote the source andgeophone x-coordinates for a shot gather; and tg and ts denote the listening time and sourceexcitation time, respectively. Typically, the source is assumed to be excited at time ts = 0.
6.2.1 Prestack Migration = Smear d(xg, t) along Ellipse(x, z)
Which parts of the model could the reflection energy at time τ originate from? Similarto the poststack migration example, the answer is that the (x, z) parts of the model thatsatisfy the moveout equation for a fixed t, xg and xs. This equation defines an ellipse inmodel space with foci at (xg, 0) and (xs, 0).
Similar to the poststack migration formula, prestack migration smears a reflection sam-ple into model space, but along the appropriate ellipse rather than a semi-circle. Theformula for prestack migration is given by
m(x, z) =∑xg
∑xs
d(xg, 0, τ(xg, xs, x, z)|xs, 0, ts)/A(x, z, xg, xs),
(6.3)
Examples of stacked data, poststack migration and prestack migration are given in Fig-ures 6.7-6.8.
6.3 Spatial Sampling Issues
How does one choose the trace and shot intervals as well as the total recording aperture?The trace interval is selected so that the discrete representation of the data still containsunambiguous information about dips. Steeper data dips and higher source frequencies willdemand finer trace spacing. Also, steeper dips in the model will give rise to ZO reflectionrays that are almost horizontal, so will demand wider recording apertures.
6.3.1 Aliased Data
If the trace spacing is too coarse, the ”wings” of the hyperbolas will not completely canceland so leave ugly smiles or frowns in the shot gather or the migration image, as shownin Figure 6.9. We say that the coarse trace spacing results in migration aliasing artifacts.Another point of view is that steep dips in the data appear more shallow if the trace spacingis too coarse; i.e., the data are aliased..
Aliasing can be cured by making sure that the shortest apparent wavelength in the data(λx)min is greater than 1/2 the trace spacing ∆x. By definition min(λx) = Tmin(dx/dt)min
so that the anti-aliasing condition is
2∆x < min(λx) = (dx/dt)minTmin, (6.4)

6.3. SPATIAL SAMPLING ISSUES 123
0
0.5
1.0
1.5
2.0
2.5
Time (
s)100 200 300
CDP
Stack
0
0.5
1.0
1.5
2.0
2.5
3.0
Depth
(km)
100 200 300CDP
Poststack Depth Mig
Figure 6.7: (Top) Stacked section and (bottom) poststack depth migration sections (cour-tesy of Jianhua Yu and Unocal). Notice how truncated reflectors have been shortened anddiffractions frowns have been reduced by migration.

124 CHAPTER 6. PRACTICAL MIGRATION
1
2
3
Tim
e (s
)
100 200 300 400 500 600 CDP
Stack section with AGC window of 400 ms
1
2
3
Tim
e (s
)
0 100 200 300 400 500 600 CDP
PSTM section with AGC window of 400 ms
Figure 6.8: (Top) Stacked section and (bottom) prestack time migration (courtesy of Jian-hua Yu and Unocal).

6.3. SPATIAL SAMPLING ISSUES 125
wheremin(λx) is the minimum apparent wavelength along the x-direction in the hyperbolas.This is known as the Nyquist sampling criterion, and its violation means that neighboringtraces undergo more than 1/2 period of time shift. This assumes that the model grid isdiscretized finely enough to avoid problems in discretely sampling a continuous interface.
A visual example of aliased data is given in Figure 6.10. The bottom image is a snapshotof a horizontally propagating plane wave. The top and middle figures show the seismogramsrecorded on the horizontal surface, except the top section is aliased while the middle sec-tion is well sampled in space. The dip of the events in the middle section show the truepropagation velocity (dx/dt=v) while the apparent velocity of the dip in the top sectionis slower because the data are aliased. Try running the MATLAB code below to see howaliasing affects recorded data.
colormap(’gray’); subplot(311); plot(1:2,1:2); subplot(312);plot(1:2,1:2); subplot(313); plot(1:3,1:3);nangle=3;nt=50;nsnap=nt*nangle;itt=0;c=.2;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
rect=get(gcf,’Position’);rect(1:2)=[0 0];M=moviein(nsnap,gcf,rect);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%for iangle=1:nangle; lam=6;angle=pi/4.2*(iangle-1);kx=2*pi*cos(angle)/lam;ky=sin(angle)*2*pi/lam;nx=100;k=sqrt(kx^2+ky^2);w=k*c; r=1:1:nx;i=ones(nx,1);dx=i*r; dy=dx’;tt=.001*[nt:-1:1];sei1=ones(nt,nx/4);sei=ones(nt,nx);
for it=1:nt; itt=itt+1; pw=cos(dx*kx+dy*ky+w*it);pw=fliplr(pw);for iii=1:25; sei1(it,iii)=pw(1,1+(iii-1)*4); end;sei(it,:)=pw(1,:);%%%%%%%%%%%%%%%%subplot(311);imagesc(r,tt,sei1);if iangle==1;title(’Seismograms: Angle = 0 deg’);end;if iangle==2;title(’Seismograms: Angle = 40 deg’);end;if iangle==3;title(’Seismograms: Angle = 80 deg’);end;ylabel(’Time (s)’); pause(.2)%%%%%%%%%%%%%%%%subplot(312);imagesc(r,tt,sei);if iangle==1;title(’Seismograms: Angle = 0 deg’);end;if iangle==2;title(’Seismograms: Angle = 40 deg’);end;if iangle==3;title(’Seismograms: Angle = 80 deg’);end;ylabel(’Time (s)’); pause(.2)

126 CHAPTER 6. PRACTICAL MIGRATION
%%%%%%%%%%%%%%%%subplot(313);imagesc(pw);xlabel(’Horizontal Offset (m)’);ylabel(’Depth (m)’);if iangle==1;title(’Snapshots: Angle = 0 deg’);end;if iangle==2;title(’Snapshots: Angle = 40 deg’);end;if iangle==3;title(’Snapshots: Angle = 80 deg’);end;pause(.2)%%%%%%%%%%%%%%%%M(:,itt)=getframe(gcf,rect); end; end; N=1 ;FPS=1 ;movie(gcf,M,N,FPS,rect);%mpgwrite(M, hot, ’filename’, [1, 0, 1, 0, 10, 8, 10, 25]);
6.3.2 Migration Operator Aliasing
Even if the data are sampled properly, the migration operator can be aliased. That is,migration can be viewed as either ”smearing a time sample of data along the correspondingmigration circle (or ellipse)”, or equivalently it can be viewed as ”summing energy alongthe appropriate hyperbola (for a fixed trial image point at x and source-receiver pair) anddumping it into the pixel centered at x”. The latter view is illustrated in Figure 6.11,where shallower trial image ponts lead to more steeply dipping wings of the hyperbola.Since we are summing amplitudes along these hyperbola we must ensure that the dip alongthe migration hyperbola is not as steep as the trace spacing allows; otherwise the data arealiased.
2∆x < λxoperator =
dx
dtmig. op.Tmin. (6.5)
Violation of this operator anti-aliasing condition will lead to migration artifacts in themigration image. A simple cure is to low pass filter the trace so the righthand side of theabove equation becomes larger. More sophisticated cures are also possible (Biondi, 2001).
For the simple cure of migration operator aliase, we apply a low pass filter to the tracesto eliminate the frequency components for which the anti-aliasing condition is violated.According to the anti-aliase condition in equation 6.5, the maximum unaliased frequencycan be represented as:
unaliased︷ ︸︸ ︷fmax <
12∆xdtmig. op.
dx
. (6.6)
For 2D poststack Kirchhoff time migration, tmig. op. is the two way traveltime from the
shot/geophone position to the image point in the model, 2√
(x−ximage)2+zimage2
c . Substitutethe traveltime for 2D poststack migration operator into equation 6.6, and we obtain themaximum unaliased frequency for the migration operator:
unaliased︷ ︸︸ ︷fmax <
c√
(x− ximage)2 + zimage2
4x ·∆x . (6.7)

6.3. SPATIAL SAMPLING ISSUES 127
−0.5
0
0.5
X−offset (m)
De
pth
(m
)
Poststack Migration Image
0 200 400 600 800 1000 1200 1400 1600 1800
0
500
1000
1500
−4
−2
0
2
Offset (m)
Tim
e (
s)
Poststack AGC Data in 1−Way Time
0 200 400 600 800 1000 1200 1400 1600 1800
0
0.2
0.4
0.6
0.8
1
Student Version of MATLAB
Figure 6.9: Same as synclinal model results except a coarse grid of data are the input togive rise to an aliased migration section with smiley artifacts. Note, the flat reflector datais not aliased but the steeply dipping part of data (syncline reflections) is aliased.

128 CHAPTER 6. PRACTICAL MIGRATION
Seismograms: Angle = 0 deg
Tim
e (
s)
0 10 20 30 40 50 60 70 80 90 100
0.01
0.02
0.03
0.04
0.05
Seismograms: Angle = 0 deg
Tim
e (
s)
10 20 30 40 50 60 70 80 90 100
0.01
0.02
0.03
0.04
0.05
Horizontal Offset (m)
Depth
(m
)
Snapshots: Angle = 0 deg
10 20 30 40 50 60 70 80 90 100
20
40
60
80
100
Student Version of MATLAB
Figure 6.10: (Top) Aliased and (middle) well-sampled seismograms for the horizontallypropagating wave seen in the bottom snapshot. Aliased data appears to have slower movingwaves, just like a fan that appears to spin backward in a strobe light.

6.3. SPATIAL SAMPLING ISSUES 129
� � �
� � �
� � �
� � � � � �� � �
� �
� �
� �
� �
� � � �
� � � �
� � � �
� � � � � � �
� � �
� � �
� � �
� � �
� � � �
� � � �
� � � �
� � � � � � � � �
� � � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � �
� � � � �
� � � � �
� � � � �
� � � �
� � � �
� � �
� � �
� � �
� � �� � �� � �
� �
� �
� �
� �
� � � �
� � � �
� � � �
� � � � ! ! !
" " " "
" " " "
# # # #
# # # # $ $ $ $ $
$ $ $ $ $
% % % %
% % % %
& & & &
& & & &
' ' ' '
' ' ' '
( ( ( (
( ( ( (
( ( ( (
) ) ) )
) ) ) )
* * * * *
* * * * *
* * * * *
+ + + +
+ + + +
Tim
e
X
Tim
e
X
Data
Migration Hyperbola
Migration HyperbolaData
No Operator Aliasing Operator AliasingOperator Dip > Data Dip
Figure 6.11: (Left) Migration hyperbola associated with a fixed trial image point at (left)deep and (right) shallow depths. The shallow depth migration operator has a dip anglesteeper than that for the data, so it is aliased.

130 CHAPTER 6. PRACTICAL MIGRATION
The maximum unaliased frequency for 3D and prestack migration operator can be obtainedin a similar way.
Then we design a low pass filter to eliminate the components in the traces with fre-quencies higher than the corresponding maximum unaliased frequencies. A triangle filter isintroduced by Lumley et al. (1994) to eliminate the aliased frequencies. The Z transformedformulation of this triangle filter is:
g(z) =−z−k−1 + 2− zk+1
α(1− z)(1− z−1), (6.8)
where the filter scaling coefficient α = (k + 1)2 and the length of the filter is N = 2k + 3.The magnitude spectrum of the triangle filter can be derived as:
A(ω) =sin2(ω∆t(k + 1)/2)α sin2(ω∆t/2)
, (6.9)
and has spectral notches at the frequencies
fn =ωn
2π=
n
(k + 1)∆t;n = 1, 2, 3, .... (6.10)
The length of the filter is decided such that f1, the first notch frequency at the magnitude
spectrum, is equal to the maximum unaliased frequency
unaliased︷ ︸︸ ︷fmax . Then we have
k =1f1− 1 =
1unaliased︷ ︸︸ ︷fmax
− 1 =4(x− ximage)∆x√
(x− ximage)2 + zimage2∆t · c
− 1. (6.11)
Figure 6.12 shows the magnitude spectrum of a triangle filter with ∆t = .01 sec and k=5.Note that 1/(1−z) in the denominator of the filter g(z) can be expanded as a geometrical
series 1+ z+ z2 + z3 + z4 + · · ·, which represents a causal filter with unit values at and after
time point 0 in time domain. Convolving an input trace f(n) with this filter givesn∑
−∞f(i),
the causal integration of the input trace. Similarly, 1/(1− z−1) in the denominator of g(z)represents an acausal filter with unit values at and before time point 0, and convolving the
input f(n) with this acausal filter gives the acausal integration of the input∞∑
i=n
f(i). The
numerator of the filter g(z) is a gapped three-point difference operator and the gap lengthk+1 determines the high cut frequency of the filter. Therefore, after the causal and acausalintegration of the input trace, we need only to implement a three-point difference to theintegrated series and can obtain the low pass output for the local time points.
The effect of the triangle anti-aliased filter on migration results is shown in Figure 6.13,where two sections migrated with and without the triangle anti-aliase filter for the samedata set are demonstrated. This comparison indicates that the anti-aliase filter effectivelyprecludes the migration artifacts due to migration operator aliasing. This improvementis more much obvious in the shallow part of the section than in the deep part because

6.3. SPATIAL SAMPLING ISSUES 131
the migration operator is easier to get aliased with small image point depth, which is alsoimplied in equation 6.7.
A latent problem of using this triangle filter to preclude migration operator aliases is thepossible loss of numerical precision, which might lead to amplitude distortion in migratedsections (Ray Abma, 2006). Since a causal and an acausal integrations of the values alongtraces are involved in the filtering process, the amplitude of the integration output mayincrease dramatically in some occasions. If the computation precision is not high enoughthe numerical precision will be lost when we sum some low amplitude values during theintegrations, especially when there are significant amplitude difference in input traces. Thisloss of numerical precision may result in serious distortions of migrated images. Figure 6.14shows an exaggerated example of the effect of numerical precision on migration results. Inthis example two sections migrated with triangle filter done in single and double precisionare demonstrated for a synthetic data set with spikes having magnitude of about 100 000and of about 1.0. There are apparent loss of weak events in the migrated section done insingle precision (Ray Abma, 2006).
One solutions to this problem is using double precision float numbers during the wholecomputation processes, which demands twice computer memory as single precision compu-tation does. When twice memory can not be easily accessed, we can do the integration indouble precision, and store the result in single precision after removing the linear trendsfrom the integrated data, because the three-point difference in the filter ignores any lineartrend.
Following code is an application of the triangle anti-aliase filter to 2D poststack timemigration, and it is the function to implement the anti-aliasing migration.
function [migi]=migrate1(cdp1,nx,ntime,dt,app,rick,dx,c,zbottom,fwavelet)dz=dx*.1; izbottom=round(zbottom/dz);x=dx*nx;nxx=round(x/dz);migi=zeros(nxx,izbottom);for ixtrace=1:nx;
ixtrace;xtrace=round(dx*ixtrace);
% Apply causal integration to the tracetrace_int1=cumsum(cdp1(ixtrace,:));
% Apply acausal integration to the tracetemp=fliplr(trace_int1);trace_int2=fliplr(cumsum(temp));
istart=max(1,1 + round(dx/dz*((ixtrace-1)-app)));iend=min(nxx,1+ round(dx/dz*((ixtrace-1)+app)));for ixs=istart:iend;
for izs=2:izbottom;r = sqrt((ixtrace*dx-ixs*dz)^2+(izs*dz)^2);
% Determine the maximun unaliased frequency fmaxif (ixtrace*dx-ixs*dz==0)
fmax=10000;else

132 CHAPTER 6. PRACTICAL MIGRATION
fmax=r*c/2/dx/abs(ixtrace*dx-ixs*dz);end
obliquity=abs(izs*dz)/r;time = round( 1 + r/c/dt );time=min(ntime,time);r=1;
% if fmax is greater than 3 times of the wavelet dominana frequency,% all frequency components in the trace is unaliased and we apply% the migration operator to the original traces.% Otherwise, we low pass filter the traces and then migrate them.
if (fmax>3*fwavelet)migi(ixs,izs) = migi(ixs,izs) + cdp1(ixtrace,time)*obliquity/r;
else% Determine the filter length according to% the maximum unaliased frequency fmax
k=max(round(1/fmax/dt-1),0);t1=max(time-k-1,1);t2=min(time+k+1,ntime);filt_output=-trace_int2(t1)-trace_int2(t2)+2*trace_int2(time);filt_output=filt_output/(k+1)^2;
migi(ixs,izs) = migi(ixs,izs) + filt_output*obliquity/r;endend;
end;end;subplot(212);imagesc([1:izbottom]*dz,[1:nx]*dx,migi’);colormap(gray)title([’Partial Migration Section at Iteration ’,num2str(ixtrace)])subplot(211);imagesc([1:ntime]*dt,[1:nx]*dx,cdp1’);title(’Radar Section’);pause(.05)
6.3.3 Aperture Limitation.
Wider apertures will lead to better horizontal resolution, and also allow for recording ofevents with nearly horizontal raypaths. The aperture width should be estimated by usingthe formula given in Figure 6.15.
6.4 Time Migration vs Depth Migration
Depth migration in a variable velocity medium can be effected by replacing the t = r/cstatement in the MATLAB script by the traveltime obtained from ray tracing seismic en-ergy from the trace position to the migrated image point. This is the correct procedurefor downward continuing recorded energy to its place of origin, and such traveltimes cancomputed by a finite-difference solution to the eikonal equation.
Sometimes the velocity is not known very well so that the depth migration results donot look very good. In this case the geophysicists try to use a degraded form of migration

6.4. TIME MIGRATION VS DEPTH MIGRATION 133
−80 −60 −40 −20 0 20 40 60 800
0.2
0.4
0.6
0.8
1
Frequency (Hz)
Am
plitu
de
The magnitude spectrum of the triangle filter: dt=.01sec and k=5
Figure 6.12: The magnitude spectrum of the triangle low pass filter with ∆t = .01 sec andk=5. The spectrum notches are at the frequencies fn = n
(k+1)∆t . The frequencies betweenthe two first notches are preserved and the other frequency components are suppressed afterthe filtering.

134 CHAPTER 6. PRACTICAL MIGRATION
The section migrated with anti−aliase filter
X (m)
Dep
th (
m)
50 100 150 200 250 300
50
100
150
200
250
300
The section migrated without anti−aliase filter
X (m)
Dep
th (
m)
50 100 150 200 250 300
50
100
150
200
250
300
Figure 6.13: The sections migrated without (left) and with (right) anti-aliase filter. Af-ter applying an anti-aliase filter to the migration operator, the migration artifacts due tomigration operator aliasing are effectively eliminated.
Figure 6.14: The migrated sections done in double precision (left) and single (right) for anidentical synthetic data set with large amplitude difference (Ray Abma, 2006).

6.4. TIME MIGRATION VS DEPTH MIGRATION 135
L = D/tanα
L
D
α
α
Figure 6.15: Aperture width L should be computed by estimating the maximum dip angleα of a reflector and its depth D, so that L = D/tanα.

136 CHAPTER 6. PRACTICAL MIGRATION
known as time migration. Time migration is effected by replacing the t = r/c statement inthe MATLAB script by the NMO traveltime computed from the RMS velocity. The depthloop is replaced by a loop over the zero-offset traveltimes. This replacement automaticallyassumes an earth model with vertically varying velocity, negligible ray bending, and nolateral velocity variations. The reflection event is smeared along a circle, as shown inFigure 6.16. Note that this type of migration does not require ray tracing so it is faster thandepth migration. The problem is that it still smears energy along circles, which is incorrectif there is significant ray bending across interfaces. This leads to the mispositioning ofthe lateral positions of irregular reflectors. As an example, the migration of the field dataclearly images the dipping layer while the time migrated Kirchhoff migration smeared thereflector position. Below is a time-migration MATLAB code.
for ixtrace=1:ntrace; Loop over ZO trace indiciesfor xs=istart:iend; Loop over model space indicies (xs,t0)for t0=1:nt0;r = vnmo(t0)*t0 Compute geometrical-spreading radiustime = sqrt( (t0/dt)^2 + (x/vnmo(t0)/dt)^2 ); Compute 1-way time to circlem(xs,t0) = m(xs,t0) + data(ixtrace,time)/r; Smear/sum reflections into (x,t0)
end;end;
end
One effect of time migration is that the time migration images sometimes looks betterthan depth migration images. This is because the images are plotted in offset vs two-wayvertical time space, so there will be no wavelet stretch due to a faster velocity medium. Thatis, in depth migration the wavelet is smeared within the fat semicircle, but if the velocity ofthe semicircle is faster at depth (longer wavelength for a given period) then the upper partof donut is thin and lower part of donut is fat. Compare the stretching effect in Figure 6.7to the no-stretch time migration section in Figure 6.8. Thankfully, time migration lookslike it is becoming less common because of the inaccuracies in positioning events.
However, time migration is preferred if the velocity model is not very well known. Why?Because the NMO velocity is obtained by looking for the best hyperbola that most coher-ently stacks reflections. Thus, time migration focuses energy as well as any summationalong hyperbolas can hope to achieve. Compare this to depth migration with a crummyvelocity model. For a crummy velocity model we are summing energy along a correspond-ingly crummy quasi-hyperbola, resulting in a crummy focused image. Crumbs in, crumbsout.

6.4. TIME MIGRATION VS DEPTH MIGRATION 137
T=3s
T=3s
Single ZO Trace
Time Migration Operator Depth Migration Operator
Figure 6.16: ZO time migration circles do not take into account raybending effects, sothe result is that time migration laterally mispositions the events. Depth migration takesinto account raybending across interfaces as well as lateral velocity variations, and so willcorrectly image the ZO reflection energy. The problem is that the ZO trace is formed bystacking CMP traces using a 1D NMO formula, which can be inappropriate for earth modelswith strong lateral velocity variations. The solution is prestack depth migration

138 CHAPTER 6. PRACTICAL MIGRATION
6.5 Spatial Resolution
What is the minimum separation between two point scatterers that can be resolved in amigrated section? This minimum distance is known as the spatial resolution of the migratedsection, where the horizontal resolution will differ from the vertical resolution. The spatialresolution will largely be a function of the wavelength λ, recording aperture L and/or depthof the scatterer.
The spatial resolution is quantitatively estimated by using the idea of a Fresnel zone(Elmore and Heald, 1969), where the first Fresnel zones makes the largest contribution tothe recorded reflection signal, with a negligible contribution from the higher-order Fresnelzones. The definition of the 1st reflection Fresnel zone is the area on the reflector such thatany reflection ray path (see Figure 6.20) from source-to-reflector-geophone differs in totalpath length by no more than a λ/2 (or arrival time difference of T/2). Therefore, two pointscatterers located within each others first Fresnel zone will not be clearly distinguishablefrom one another on a migrated section because of interference effects. An example of imag-ing data for several neighboring point scatterers at different depths is given in Figure 6.18.Here, the lateral resolution becomes worse with depth because the migration circles becomeflatter with depth, so that the deepest pair of scatterers is not resolvable in the migrationimage. The migration ellipses interfere such that only one bump rather than two appear inthe sideview image (Schuster, 1996; Chen and Schuster, 1999).
An intuitive picture of resolution limits is given in Figure 6.17. Here, two traces areused to resolve the location of a scatterer, where the intersection of the migration donutsdetermines the approximate location of the point scatterer. Note, the width (i.e., horizontalresolution limit) of the intersection zone is controlled by the width of the far-trace donut atthe scatterer point, while vertical height (i.e., vertical resolution limit) of the intersectionzone is controlled by the thickness of the near-trace donut at the scatterer point. Moregenerally, vertical resolution limits are controlled by the near-offset traces and the horizontalresolution limit is controlled by the far-offset traces. The next two sections quantify theseresolution limits with analytic formulas.
Poststack Migration Resolution. As shown in Figure 6.20, a Fresnel zone encompassesa spatial region in which the length difference between the shortest and longest reflectionray is 1/2λ. For the ZO trace in Figure 6.20, the 1st horizontal Fresnel zone has a radius of
T/2 = TACA − TABA,
= 2AB√
1 +BC2/AB2/c− 2 ∗AB/c,≈ 2AB(1 + 0.5BC2/AB2)/c− 2 ∗AB/c,= BC2/(AB ∗ c),
(6.12)
and rearranging, noting that cT = λ, setting AB = zdepth and solving for BC gives
BC = dx =√λ ∗ zdepth/2. (6.13)

6.5. SPATIAL RESOLUTION 139
Where is the Scatterer?
Answer: Here
1 2
2
Near−offset traces = better dz
Far−offset traces = better dx
1
Figure 6.17: Where is the scatterer located that explains the reflections in the near- and far-offset ZO traces? Answer: The quadrilateral intersection zone. The width of the intersectionzone is controlled by the far-offset (i.e., farthest from the scatterer) trace while its height iscontrolled by the near-offset (i.e., nearest to scatterer) trace.

140 CHAPTER 6. PRACTICAL MIGRATION
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
X−offset (m)
Dep
th (m
)
Poststack Migration Image
200 400 600 800 1000 1200 1400 1600 1800
0
500
1000
1500
−0.5
0
0.5
Offset (m)
Tim
e (s
)
Poststack AGC Data in 1−Way Time
200 400 600 800 1000 1200 1400 1600 1800
0
0.5
1
1.5
Student Version of MATLAB0
500
1000
1500
2000
0
500
1000
1500
2000−100
−50
0
50
100
Z (m)
Side View of Migration Section
X (m)
Migrati
on Am
plitude
Student Version of MATLAB
Figure 6.18: (Top) ZO data (middle and bottom) migration images for a model with 3pairs of neighboring scatterers (white stars). Lateral resolution becomes worse with depthbecause the migration circles become less tilted and Fresnel zones become wider. The pair ofscatterers separated by 125 m at z = 1700 m are not resolvable, where the central frequencyof wavelet is 15 Hz, velocity is 1500 m/s, and the aperture width is 1875 m.

6.5. SPATIAL RESOLUTION 141
where AB = zdepth is the depth of the scatterer directly beneath the ZO trace. The lengthBC is proportional to the horizontal resolution directly below a ZO trace, and so horizontalresolution becomes better for smaller wavelengths and shallower scatterers.
But what is the horizontal resolution of a ZO trace for a scatterer laterally offset fromthe ZO trace? We can cook up an analytic formula similar to the above, except now we usea short cut. That is, differentiate the traveltime equation 6.1 w/r to x to get
dt/dx = 2 ∗ (x− xg)/(√
(x− xg)2 + z2 ∗ c), (6.14)
where the factor 2 comes about because we are using the two-way traveltime equation.Setting dt = T/2 and solving for dx gives
dx = (cT√
(x− xg)2 + z2)/(4(x− xg)),
= λ√
(x− xg)2 + z2/(4 ∗ (x− xg)). (6.15)
We seek the parameters that give the minimum resolution value dx and denote this as∆x = min dx. If the scatterer depth z is much larger than the aperture L = max(x− xg),then equation 6.15 becomes
∆x = min(dx) = .25T√L2 + z2 ∗ c/L,
= .25λz√
1 + L2/z2/L.
≈ .25λz/L, (6.16)
for z >> L. Thus larger apertures, shallower scatterers, and smaller wavelengths lead tobetter horizontal resolution.
Similar considerations show that the vertical resolution can be obtained by subtractingTABA − TACA for the vertical raypath shown in the right plot of Figure 6.20:
T/2 = TACA − TABA,
= 2 ∗ABA/c− 2 ∗ACA/c,= 2 ∗BC/c. (6.17)
Solving for BC gives
BC = ∆z = λ/4. (6.18)
Figure 6.19 shows the depth migrated traces for reflections from a thinning bed, and suggeststhat we can distinguish the there are two reflectors from the migration section if theirthickness is greater than or equal to 1/4λ.
Equation 6.18 says that vertical resolution does not depend on the recording aperture.In designing a recording array, the horizontal and vertical resolution limits can be estimated(see Figure 6.20) for ZO migrated sections by the formulas 6.16 and 6.18. In fact, equa-tion 6.16 can be used to validate that the deepest pair of scatterers in Figure 6.18 are notlaterally resolvable.

142 CHAPTER 6. PRACTICAL MIGRATION
0 1 2 3 4 5 6 7 8 9 10 11−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
De
pth
(m
)
Midpoint (m)
∆ z / λ = 1
Depth Resolution Test: Interference of reflections for Different Layer Thickness/Wavelength Ratios
∆ z / λ = 0.8 ∆ z / λ = 0.6 ∆ z / λ = 0.4 ∆ z / λ = 0.2
Student Version of MATLAB
Figure 6.19: Vertical resolution limit is reached when the thickness between two neighboringreflectors ∆z = λ/4.

6.5. SPATIAL RESOLUTION 143
TABA
TACA
TABA
TACA
A
B
C
dz
B C
A
1st Fresnel Zone BC=dx
−TACA TABA
−TACA TABA
T
= T/2
= T/2
dz = /4λ
λdx z /2
Figure 6.20: Extent of horizontal (left) and vertical (right) Fresnel zones for a ZO trace,where the 1st Fresnel zone defines the area where the difference in the shortest and longestraypath is equal to half the wavelength. The approximation formula for horizontal resolutionis valid when AB is much larger than λ.

144 CHAPTER 6. PRACTICAL MIGRATION
Prestack Migration Resolution. Similar considerations define the resolution limits formigrating a prestack gather of CMP traces, as shown in Figure 6.21. Here, the minimumvertical resolution of the migrated gather is governed by the migrated ZO trace, which is∆z = λ/4. On the other hand, the far-offset trace will govern the minimum horizontalresolution, which is dx = λ ∗ z/(4L), where L is the recording aperture.
A formula for ∆x can be derived by a procedure similar to that of the ZO trace resolution;or by differentiating the traveltime equation
τ = τsx + τxg,
=
downgoing time︷ ︸︸ ︷√(xs − x)2 + (ys − y)2 + (zs − z)2/c+
upgoing time︷ ︸︸ ︷√(xg − x)2 + (yg − y)2 + (zg − z)2/c,
(6.19)
with respect to the x-coordinate x of the trial image point, ∂τ/∂x, setting dτ → T/2, andsolving for dx. These are known as migration stretch formula and give both stretch andresolution estimates along the x and z directions.
How does one find the minimum dz and dx at image point (x0, y0, z0) for an entireensemble of prestack traces? Simply find the source receiver pairs that minimize theseresolution estimates.
The above formulas are restricted to homogeneous velocity media, but the real earth isinhomogeneous in velocity. Resolution estimates can be obtained for inhomogeneous mediaby using the simple idea that the sum of the unit vectors of the downgoing and negative up-going rays is proportional to the wavenumber kmodel of the model that can be reconstructedFor example, the ZO vertical rays suggest that the wavenumber of the model that can bereconstructed is proportional to ~kmocel = (0, 0, 2π/λ). Note, the kx and ky componentsare zero because the ray is perfectly vertical and has no x-y component (Gesbert, 2003).Formally, the model wavenumber that can be reconstructed (see Figure 6.22) is given by
~k = ω∇(τdown(x) + τup(x)). (6.20)
Similar considerations can be used to estimate resolution for tomographic images (Shengand Schuster, 2003).
Is it really important to be concerned about the subtle nuances of improving lateralresolution? Jianhua Yu shows in Figure 6.23 that modest lateral resolution leaves doubtabout the existence of fault, but slightly improving this lateral resolution via migrationdeconvolution leaves no doubt about the existence of a fault.
Beylkin Resolution → Migration Stretch. A simple interpretation of equation 6.20 isthat it is equivalent to the formula for migration stretch. Specifically, the migration stretchformulas in the different coordinate directions are given by differentiating the traveltimeformula 6.19 with respect to the coordinates of the trial image point (x, y, z):
∂τ/∂x = ∂τsx/∂x+ ∂τxg/∂x,
∂τ/∂y = ∂τsx/∂y + ∂τxg/∂y,
∂τ/∂z = ∂τsx/∂z + ∂τxg/∂z.
(6.21)

6.5. SPATIAL RESOLUTION 145
TABA
TACA
1st Fresnel Zone
A
B C
BC=dx
’
’A’
dx λ z4L
L
−TACA TABA’ ’ = T/2
Figure 6.21: Extent of horizontal Fresnel zone for a trace with non-zero offset between thesource and receiver. The 1st horizontal Fresnel zone for a reflection defines the area wherethe difference in the shortest and longest reflection raypaths is equal to half the wavelength.

146 CHAPTER 6. PRACTICAL MIGRATION
dTdown dTdowndx dy
i + j
Source Receiver
k
dx dyi + jdTup dTup
Upcoming raypathDowngoing raypath
Figure 6.22: Wavenumber k of model that can be reconstructed by the downgoing andupgoing rays of the reflection. Here k = ω(∇Tdown + ∇Tup), so that wavenumbers thatpoint sideways (down) indicate good lateral (vertical) resolution.

6.5. SPATIAL RESOLUTION 147
Figure 6.23: 3D prestack migration images (left) before and (right) after migration decon-volution. Lateral resolution improves by about 20 percent so that the right image leaves nodoubt about the existence of a fault.

148 CHAPTER 6. PRACTICAL MIGRATION
Using a Fresnel-zone argument, we set ∂τ ≈ T/2 and ∂x ≈ ∆x, ∂y ≈ ∆y and ∂z ≈ ∆z onthe left hand side of the above equation, and rearrange terms to get analytical expressionsfor the resolution limits (∆x,∆y,∆z), or migration stretch in the three coordinates similarto the expression in Figure 6.21. Here, T is the dominant period of the wavelet. Multiplyingthe three stretch formula in equation 6.21 by ω yields the components proportional to theBeylkin wavenumber formula in equation 6.20 (e.g., recall ω∂τ/∂x = kx). This establishesthe equivalency between Beylkin’s fancy resolution formula and the well known migrationstretch formulas.
6.6 Summary
The practical aspects of integral equation migration are reviewed. Migration can be viewedas either ”smearing a time sample of data along the corresponding migration circle (orellipse)”, or equivalently it can be viewed as ”summing energy along the appropriate hy-perbola (for a fixed trial image point at x and source-receiver pair) and dumping it intothe pixel centered at x”. The latter view is illustrated in Figure 6.11, where shallowertrial image ponts lead to more steeply dipping wings of the hyperbola. Since we are sum-ming amplitudes along these hyperbola we must ensure that the dip along the migrationhyperbola is not as steep as the trace spacing allows; otherwise the data are aliased.
A more economical migration can be carried out by ordering the loops so that the outerloops are over data space coordinates (i.e., traces), while the inner loops are over modelspace coordinates. This is because the data volume is five dimensional while the modelvolume is 3 dimensional; thus, IO cost is minimized if the trace sample is visited only onceby having the outer loop over trace coordinates.
There are three critical parameters that should be selected prior to designing a seismicexperiment or migrating seismic data:
• Spatial sampling interval ∆x of geophones and sources. The spatial sampling intervalis determined by the minimum horizontal wavelength λmin of the seismic data suchthat λmin > 2∆x. This minimum wavelength is estimated a priori from previousexperiments in the area or from a test seismic experiment that spatially oversamplesa shot gather and determines from this shot gather the minimum apparent wavelengthin the data: (dx/dt)minTmin > 2∆x. Normally, the surface waves are much slowerthan the body wave reflections (they travel along the surface at about the shearwave velocity at the near surface) so this would require too expensive of a geophonesampling interval. Instead companies will use an array of geophones (up to 70/groupin Saudi Arabia!) for each group or channel to cancel out the slow moving surfacewave yet retain the long wavelength body wave reflection.
• Aperture width. Wide angle reflections will allow for the capture of steeply dippingspecular reflections. Estimation of the aperture width should use the formula givenin Figure 6.15. An alternative estimation procedure is the Beylkin stretch formulawhere the user decides the acceptable resolution at a selected depth region and usesthe stretch formulas to estimate aperture width. The best vertical resolution you canachieve is λmin/4 but the best horizontal resolution is estimated by a complicatedstretch formula that is a function of source and receiver coordinates.

6.7. REFERENCES 149
• A digital anitaliasing filter should be applied to the data to eliminate operator aliasing.
The diffraction stack formula is acceptable when there is plenty of redundancy in the data(i.e., high fold) but the obliquity factor should be used if fold is low. Experience shows thatthe obliquity factor suppreses aliasing-like artifacts in the final migration image. Unlikedepth migration, time migration does not suffer from migration stretch but does sufferfrom mispositioning of events in complex geologic areas. Therefore it is rarely used todayfor subsalt imaging. However, the velocity model must be finely tuned in order to getdepth imaging to show a coherent section. This compares to time migration which usuallyprovides a good looking image because the stacking velocity is used to estimate the time-migration velocity. The stacking velocity is robustly estimated by efficient and automaticvelocity scans while the velocity model for depth migration is typically estimated by atime-consumming and tedious process (e.g., reflection tomography or migration velocityanalysis).
6.7 References
Abma, R., 2006, Numerical precision and triangle filter antialiasing in Kirchhoff migrations:The Leading Edge, 25, 20-23.
Biondi, B., 2001, Kirchhoff imaging beyond aliasing: Geophysics, 66, 654-664.
Beylkin, G., 1985. Imaging of discontinuities in the inverse scattering problem by inversionof a causal generalized Radon transform: J. Math. Phys., 26, 99–108.
Chen, J., and Schuster, G.T., 1999, Resolution limits for migration images: Geophysics,1046-1053.
Claerbout, J., 1996, Earth Soundings Analysis: Processing versus Inversion: Blackwell Sci-ence Ltd., London, U.K.
Elmore C. W. and Heald A. M., 1969, Physics of Waves: McGraw-Hill Book Company, NewYork, US.
Gesbert, S., 2002, From acquisition footprints to true amplitude: Geophysics, 67, 830-839.
Lumley, D., Claerbout, J., and Bevc, D., 1994, Anti-aliased Kirchhoff 3-D migration: 64thAnn. Internat. Mtg., Soc. Expl. Geophys. Expanded Abstracts, 1282-1285.
Schuster, G.T., 1996, Resolution limits for crosswell migration and traveltime tomography:Geophysical J. Int., 427-440.

150 CHAPTER 6. PRACTICAL MIGRATION
Sheng, J., and Schuster, G.T., 2003, Finite-frequency resolution limits of wave path travel-time tomography for smoothly varying models: Geophys. J. Int., 152, 669-676.
Stolt, R., and Benson, A., 1986, Seismic Migration: Theory and Practice: in Handbook ofGeophysical Exploration, Volume 5, Geophysical Press, London, UK.
6.8 Exercises
1. The CDP interval in Figure 7 is 50 m. The velocity at z = 1 km is 2 km/s andat z = 2.5 km it is 4 km/s, and the recording aperture is 350 CDP’s wide for anyshot point. Calculate the minimum horizontal and vertical resolutions for a prestackmigration image at the points (x, z) = (0 km, 1 km), (x, z) = (1 km, 1 km), (x, z) =(0 km, 2.5 km), and (x, z) = (1 km, 2.5 km). Same question as before, except calculateminimum horizontal and vertical resolutions for a poststack migration image. Showwork.
2. Using fat circles and fat ellipses, compare the vertical and horizontal resolution limitsfor poststack migration and prestack migration for a point at (x, z) = (1 km, 2.5 km)in Figure 7. Assume a homogeneous velocity.
3. Convert your poststack depth migration code into a prestack time migration code.The output should be in the offset-time domain. Show poststack depth and timemigration images.
4. Determine the maximum aperture for a seismic experiment in order to image 0− 40degree dips at z = 5 km. Assume a homogeneous velocity of 5 km/s. What isthe minimum geophone spacing in order to not spatially alias the data? Assume aminimum wavelet period of 0.01 s. Clearly show steps in your reasoning.
5. Derive and use the Beylkin stretch formulas (starting point for derivation is equa-tion 6.21) to estimate the best horizontal and vertical resolutions for a 12 km widepoststack depth section at the following coordinates: (0,12), (12,12), (6,12), (6,6),(0,6), (3,3), (0,12). Assume the origin of coordinate system is at upper left portionof migration section and positive z is pointing downward. Assume a homogeneousvelocity of v = 3 km/s from 0-3 km, v = 5 km/s from 3-7 km, and any deeper than7 km we have a velocity of 6 km/s. Assume a maximum useful frequency of 80 Hz.Assume straight rays everywhere. Why is there better horizontal resolution at shallowdepths?
6. Time migrate the radar data from your lab exercise. Choose a suitable time migrationvelocity by trial and error. Show results. Which results look more coherent, thetime migration or depth migration results? Why does depth migration suffer frommigration stretch which is avoided by time migration. Wgat are benefits and liabilitiesof time migration vs depth migration?
7. Apply an antialiasing filter (equation 6.8 to your radar migration images. Selectdifferent cutoff frequencies as a function of depth (note, c in equation 6.7 varies as afunction of depth).

6.8. EXERCISES 151
8. Estimate the horizontal wavelength of surface waves and body wave reflections in theSaudi shot gather (from a previous lab). What is a good array interval that wouldsuppress surface waves but retain body waves ion the data. Test your estimate byapplying an N-point spatial averaging filter to the data, where N is length of yourestimated filter. Show results.


















