Basic Issues and Modeling of Structural Dynamics for Aeroelasticity · 2019-10-03 · Aircraft...
18
Chapter 1 Basic Issues and Modeling of Structural Dynamics for Aeroelasticity In this Chapter the linear Ordinary Differential Equations (ODE’s) of motions, which for a linearly-elastic solid can be elegantly provided too, are carried out on the basis of an energetic principle only. Furthermore, they are specialized in term of the external dynamic loads of an elastic aircraft which is the relevent topic of this course. However, the specific modeling of the unsteady aerodynamic force will be addressed in the Chapters 3, 4, and 5. 1.1 Discrete Structural Dynamics and Lagrange Equations Let us assume that the dynamics of a continuous elastic body can be described by a set of infinitive scalar function q n (t)(i =1, 2, ..., ∞) known as Lagrange variables; then, this implies that, if the motion function x(ξ α ,t)(ξ α for α =1, 2, 3, represent a set of material coordinate 1 is referred to a reference position ◦ x (ξ α ) (Fig. 1.1), i.e., x(ξ α ,t)= ◦ x (ξ α )+ u(ξ α ,t) (1.1) then one can generally assume for the displacement field u(ξ α ,t) u(ξ α ,t)= u(ξ α ; q 1 (t),q 2 (t), ...) (1.2) where q n (t)’s are Lagrangean co-ordinates able to describe the elastic motion of the body. 1 Note that in solid mechanics, this set of coordinates (Lagrangean coordinates) is typically chosen as coinci- dent at the undeformed-reference configuration with the Carthesian coordinate system which describes the point position (Euler coordinates). 15
Transcript of Basic Issues and Modeling of Structural Dynamics for Aeroelasticity · 2019-10-03 · Aircraft...

Chapter 1
Basic Issues and Modeling ofStructural Dynamics forAeroelasticity
In this Chapter the linear Ordinary Differential Equations (ODE’s) of motions, which for a
linearly-elastic solid can be elegantly provided too, are carried out on the basis of an energetic
principle only. Furthermore, they are specialized in term of the external dynamic loads of an
elastic aircraft which is the relevent topic of this course. However, the specific modeling of the
unsteady aerodynamic force will be addressed in the Chapters 3, 4, and 5.
1.1 Discrete Structural Dynamics and Lagrange Equations
Let us assume that the dynamics of a continuous elastic body can be described by a set of
infinitive scalar function qn(t) (i = 1, 2, ...,∞) known as Lagrange variables; then, this implies
that, if the motion function x(ξα, t) (ξα for α = 1, 2, 3, represent a set of material coordinate1
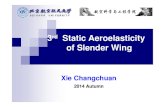
is referred to a reference positionx (ξα) (Fig. 1.1), i.e.,
x(ξα, t) =x (ξα) + u(ξα, t) (1.1)
then one can generally assume for the displacement field u(ξα, t)
u(ξα, t) = u(ξα; q1(t), q2(t), ...) (1.2)
where qn(t)’s are Lagrangean co-ordinates able to describe the elastic motion of the body.
1Note that in solid mechanics, this set of coordinates (Lagrangean coordinates) is typically chosen as coinci-dent at the undeformed-reference configuration with the Carthesian coordinate system which describes the pointposition (Euler coordinates).
15

16
Figure 1.1: motion description for an elastic body.
The body is also assumed to be loaded by a vector field f of external body forces (forces per
unit mass) and also by a vector field of external surface forces denoted by t (forces per unit
area).
Assuming as variational principle that the total energy of the elastic system has a stationary
point, one obtains
d
dt
(∂T∂qn
)− ∂T
∂qn+
∂E∂qn
= en (1.3)
(n = 1, 2, ...,∞) where T and E are the kinetic and elastic energy of the body respectively,
whereas en(t)’s are generalized forces able to perform work W on the generalized co-ordinates
such that W =∑∞
n enqn.
Next, we assume that the relationship given by Eq. 1.2 is
u(ξα, t) =∞∑n
qn(t)ψn(ξα) (1.4)
and then
Du
Dt=: u(ξα, t) =
∞∑n
qn(t)ψn(ξα) (1.5)
where ψn(ξα) is an arbitrary set of functions compatible with the constraints.

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 17
For the sake of clarity we could suppose, e.g., that these functions be the shape functions
used in the finite element method: this implies that a finite number of degree of freedom equal
to N is considered (i.e., displacements at the element nodes); furthermore, that ψn(ξα) is a unit
vector in the material point corresponding to the n−th finite-element degree of freedom suitable
oriented as this degree of freedom is defined; consequently, qn(t) represents directly the value of
such degree of freedom.2 In the following we shall denote this special type of ψn(ξα) function
with ψn(ξα) and the corresponding Lagrange variables with qn(t).
• Then, reducing the problem to a finite dimension equal to N , the kinetic energy in Eq.
1.3 is given by
T =1
2
∫∫∫Vρ v · v dV ≃ 1
2
∫∫∫Vρ
(N∑n
ˆqn(t)ψn(ξα)
)·(
N∑p
ˆqp(t)ψp(ξα)
)dV
=1
2
N∑n,p
∫∫∫Vρψn(ξ
α) · ψp(ξα)dV ˆqn(t)ˆqp(t) (1.6)
Thus, a (consistent) symmetric N × N mass matrix M can be introduced with generic
entry
Mnp :=
∫∫∫Vρψn(ξ
α) · ψp(ξα)dV (1.7)
so that
T =1
2
N∑n,p
Mnpˆqn(t)ˆqp(t) dV =
1
2˙qTM ˙q (1.8)
Besides symmetry shown by itself definition (Eq. 1.7), matrix M has one more property.
First, let us note that the kinetic energy T is positive in the sense that for an arbitrary
motion x(ξα, t) for the solid, T :=1
2
∫∫∫Vρv2dV > 0 and is zero if and only if v(ξα, t) = 0
for all the material points and for all times; then, if one considers, for example, a finite-
element discretization with u =∑N
n=1 ψnqn, one obtains
T ≃ 1
2
N∑m,n
˙qmMmn˙qn =
1
2˙qTM ˙q > 0 ∀ ˙q (1.9)
which implies that the mass matrix M is definite positive.3
2Indeed, this is true for the translational degree of freedom; for the rotations the corresponding ψn(ξα) has
an orientation orthogonal to the rotation axis and a ξα dependency in the neighbourhood of the node which islinear with respect to a material coordinate orthogonal to the rotation axis (value equal to zero on the axis) withunit slope; of course, the function is zero in all the other nodes.
3A matrix A definite positive if (and only if) for all vector x = 0 one has
xTAx > 0 (1.10)

18
• Next, let us consider the elastic energy contribution in the Lagrange equation of motion
for a flexible body (see Section 2.5.1 for details). If a solid is elastic an elastic energy per
unit mass e can be defined such that
τij = ρ∂e
∂ϵij(1.11)
where τij are the component of the stress tensor. In this case the internal (elastic) energy
e is function of the strain state only.
If a solid is linearly elastic the total elastic energy function E can be defined in the neigh-
bourhood of an not-deformed state as quadratic function of the strain state only if this
energy is assumed to be zero for zero deformation and no pre-stress conditions are consid-
ered, i.e.,
E :=
∫∫∫VρedV =
∫∫∫V
ρ0e0 +∑ij
Aijεij +1
2
∑ijkl
Bijklεijεkl
dV (1.12)
If the constitutive relationships for a solid are also considered and, therefore, a linear
relationship between stresses and strains are assumed τij = Cijklεkl, Eqs. 1.11 and 1.12
imply, together with the hipothesis of zero prestress, or Aij ≡= 04
Cijkl ≡ Bijkl (1.13)
where Cijkl are the components of the fourth order constitutive tensor for the linearly
elastic solid.
Note that, because of existence of the elastic energy e, one has the symmetry property
Cijkm = Ckmij (1.14)
This arises by applying the Schwarz theorem for the function e which implies that5
∂2e
∂εij∂εkm=
∂2e
∂εkm∂εij(1.15)
Finally, the total elastic energy for the linearly elastic solid is
E :=
∫∫∫VρedV =
∫∫∫V
1
2
∑ijkl
CijklεijεkldV =
∫∫∫V
1
2
∑kl
τklεkldV =
∫∫∫V
1
2T : E dV
4Note that this issue is really trute if the density ρ is assumed to be constant; indeed, it could be shown thatthis hypothesis is not necessarily to be assumed to demonstrate Eq. 1.13.
5It could be demonstrated that the mass density ρ does not depond on the state space variable εij if nopres-stressed condition (Aij = 0) are assumed in the undeformed configuration. Thus, from now on, it is assumedρ ≃ ρ0.

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 19
Next, if one considers Eq. 1.12 and a linear kinematics for the deformation, i.e., in term
of Cartesian components
εij =1
2(ui,j + uj,i) (1.16)
one has
E :=1
2
∫∫∫VCijkmεijεkmdV =
1
8
∫∫∫VCijkm (ui,j + uj,i) (uk,m + um,k) dV
Thus, using the relation given by Eq. 1.4 one has
E =1
8
∫∫∫VCijkm
[∑r
qr(t)(ψ
r
i,j + ψr
j,i
)] [∑s
qs(t)(ψ
s
k,m + ψs
m,k
)]dV
=1
2
∑rs
qs(t)qr(t)1
4
∫∫∫V
∑ij
∑km
(ψ
r
i,j + ψr
j,i
)Cijkm
(ψ
s
k,m + ψs
m,k
)dV (1.17)
=1
2
∑rs
qs(t)qr(t)Krs
with
Krs =1
4
∫∫∫V
∑ij
∑km
(ψ
r
i,j + ψr
j,i
)Cijkm
(ψ
s
k,m + ψs
m,k
)dV (1.18)
which is the formal expression of the stiffness matrix for the linearly elastic solid. Finally,
considering Eq. 1.3, one has
∂E∂qn
=∑s
qs1
4
∫∫∫V
∑ij
∑km
(ψ
n
i,j + ψn
j,i
)Cijkm
(ψ
s
k,m + ψs
m,k
)dV =
∑m
Knsqs
Note that this matrix is symmetric, or
Krs = Ksr (1.19)
because of the physical property of the linearly elastic solids given by Eq. 1.14 applied on
the matrix definition given by Eq. 1.18.
Thus, in terms of Lagrangian variable the total elastic energy is given by
E =1
2
N∑n,p
Knp qn(t)qp(t) =1
2qT K q (1.20)
Moreover, the elastic energy E is positive in the sense that E > 0 for any arbitrary state
of the strain field E; neverthless, it could happen that it is zero for u(ξα, t) = 0 (e.g., for
a rigid-body motion) althought E be equal to zero: then, we say that E is semi-definite if
we consider u(ξα, t) - or qn(t) - as state-space variables. Now if one considers, as in the
present case, a finite-element discretization, then
E ≃ 1
2qTKq ≥ 0 ∀q (1.21)
that means that the matrix K is semi-definite too.

20
• If one considers an arbitrary virtual displacement δu compatible with the constraints –
e.g., the boundary conditions of the problem – one can evaluate the associate work δW
performed on it by the assumed external force fields f and t as given by
δW =
∫∫∫Vρf · δu dV +⃝
∫∫St · δu dS (1.22)
This work has to be equal to that performed by the new introduced generalized forces en(t)
on the corresponding Lagrange-variables δqn
δW =∞∑n
en(t)δqn (1.23)
where δqn are defined as
δu =N∑n
δqn ψn (1.24)
Thus, the performed work is given by
δW =N∑n
δqn
[∫∫∫Vρf · ψn dV +⃝
∫∫St · ψn dS
](1.25)
Therefore, comparing with Eq. 1.23 one obtain the explicit definition of the generalized
force as projection of the physical load vector fields and the assumed n-th shape function
ψn
en =
∫∫∫Vρf · ψn dV +⃝
∫∫St · ψn dS (1.26)
It is worth to point out that, in the case of a typical aerodynamic load (namely, a surface
load), the previous equation specializes to
en = ⃝∫∫
St · ψn dS (1.27)
Finally, considering the Eqs. 1.3, 1.8, and 1.20 one obtains the (linearized) Langrange equa-
tions for the finite element method:
N∑p
Mnp¨qp(t) +
N∑p
Knp qp(t) = en(t) n = 1, 2, ..., N (1.28)
Note that one of the main goal of the aeroelastic modelling is to give an explicit definition of
the generalized (aerodynamic) forces en(t)’s as functions of the state-space variables qn(t) and
ˆqn(t), which are the variables giving the state of deformation of the elastic solid. (this issue will
be explicitly clarified in details in this course in Chapters 3, 4, and 5).

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 21
1.2 Co-ordinate Transformations
In this Section we will study how the Lagrange equations are affected by co-ordinate transforma-
tions. Consider a new set of Lagrangian co-ordinates qs that are given as a linear combination
of the old ones qr:
qr =∑s
Ursqs (1.29)
The relationship between the corresponding sets of base functions is:
ψs =∑s
Ursψr (1.30)
For
u(ξα, t) =∑r
qr(t)ψr(ξα) =
∑rs
Ursqs(t)ψr(ξα) =
∑s
qs(t)ψs(ξα) (1.31)
i.e., the Lagrange equations of motion are invariant under general co-ordinate transformation.
This general issue will be investigated in the next Subsection.
1.2.1 Finite Elements vs Modes of Vibration
This Subection deals with the issue of the relationship between two formulations widely used for
analyzing structural-dynamics problems; the finite-element method and the classical approach
based on the use of the natural modes of vibration. The discussion is limited to the use of these
methods for flutter analysis, but is applicable to similar situations. In order to solve flutter
problems, it is common practice in the aerospace industry to use a two-step procedure. In the
first step, one uses the finite-element method to study the eigenvalue problem corresponding to
the free vibration case, and obtain the approximate natural modes of vibration, ψr(ξα). In the
second step, the dynamics problem is typically solved by expressing the displacement as a linear
combination of the approximate modes of vibration, ψr(ξα), and using the unknown coefficients
as Lagrangian co-ordinates.
Note that this is an efficient way to approach the problem: in the case of a typical analysis,
the number of finite-element unknowns may be of the order of several thousands; the flutter
analysis, on the other hand, is performed using a small subset (ten to twenty, only exceptionally
more: sixty for the flutter analysis of the space shuttle) of approximate modes of vibration.
One may raise the question that it might be more accurate to use the finite-element method to
study the original problem or that somehow the nonlinearities discussed above are more naturally
described in the context of a finite-element representation. In the following we address this issue
and demonstrate that the classical approach is equivalent to solve the finite-element equations
for the dynamics of the airplane by first diagonalizing the linearized equations of motion, and

22
then reducing the size of the problem by truncating the equations so as to eliminate the high-
frequency terms.
The modes of vibration are obtained solving the equations for the linear free-vibration problem
for an aircraft. These are obtained from Eq. 1.28 by setting er = 0 (neglecting damping effects6)
so that ∑s
Mrs¨qs +
∑s
Krsqs = 0 (1.33)
If one considers only a finite number of equations (r = 1, 2, ..., N), one can write the eigen-
problem associated to the Eq. 1.33
Kz(s) = λsMz(s) (1.34)
that yields N real positive7 eigenvalues λs and N orthogonal eigenvectors z(s): in fact, Eq. 1.34
premultiplied by z(s)Tyields8 (see Eqs. 1.9 and 1.21)
λs =z(s)
T
Kz(s)
z(s)TMz(s)
≥ 0 (1.35)
Moreover, if z(s)r denotes the r-th component of the s-th eigenvector corresponding to the natural
angular frequency ωs :=√λs, the following orthogonality relations can be obtained:9∑
qr
z(p)q Mqrz(s)r = mpδps (1.36)
∑qr
z(p)q Kqrz(s)r = kpδps (1.37)
or, denoting with Z a matrix having as columns all the eigenvectors z(p), the matrix relationship
ZTMZ = M ZTKZ = K (1.38)
6The dissipative behavior in solids, originally due to the tensor Tirr (see Sec. 2.3.1), is typically described aposteriori in structural dynamics considering, for instance, e viscous damping term ...+ D ˙q+ ... in Eq. 1.33, withD symetric matrix. Note that, as the Eq. 1.33 can be rewritten in this case for the free response as
˙qTM¨q+ ˙q
TD ˙q+ ˙q
TKq = 0
or
d
dt
(1
2˙qTM ˙q+
1
2qTKq
)= − ˙q
TD ˙q (1.32)
then, this matrix has to be necessary positive definite in order to describe dissipative effects.7This issue could be demonstrated on the base of the symmetry of matrices M and K.8It could be similarly demonstrated at the beginning that that the eigenvalues λs are real and, consequently,
the eigenvectors z(s) are real too.9These are obtained by subtracting by Eq. 1.34 premultiplied by z(s)
Ta similar equation with the role of the
indeces p and s interchanged and then using the matrices symmetry.

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 23
with Mps = δpsmp and Kps = δpskp. Note also that, by Eq. 1.35, λp ≡ ω2p = kp/mp. In Section
1.3.1 it is shown how the eigenvectors z(p) and the eigenvalues ω2p correspond to the physical
concepts of natural modes and frequencies of vibrations.
Next, introducing in a finite dimension N the new set of co-ordinate q
q =∑m
qmz(m) = q1z(1) + q2z
(2) + ... = Zq (1.39)
in Eq. 1.28 and using Eqs. 1.36 and 1.37, the Lagrange equation can be rewritten as
mr¨qr + mrω2r qr = er (1.40)
where er given by10
er =∑s
z(r)s es (1.41)
Figure 1.2: FE description for the mode shape-function ψp(ξα).
Next, in the following it will be shown how the Eq. 1.40 can be equivalently obtained for the
case of linearly elastic solid with linearized kinematics using as base functions the (approximated)
10Note that the equations for the approximate modes of vibration are formally equal to those for the exactnatural modes of vibration. This is due to the fact that the approximate modes of vibration satisfy the sameorthogonality conditions as the exact ones.

24
natural modes of vibration ψp(ξα) obtained using the finite-element eigenvectors z(p) and the
finite-element shape functions ψn(ξα) (see Figure 1.2):
ψp(ξα) =
∑n
z(p)n ψn(ξα) (1.42)
which coincides with the generic change in the base function given by Eq. 1.30. In fact, in this
case the general entry of the mass matrix M is
Mrs :=
∫∫∫Vρψr · ψsdV =
∑i,j
z(r)i
∫∫∫Vρψi(ξ
α) · ψj(ξα)dV z
(s)j =
∑i,j
z(r)i Mijz
(s)j = ZTMZ (1.43)
where Z :=[z(1)|z(2)|...
]: this demonstrates (see Eq. 1.36) that this diagonal matrix is identical
to that appearing in Eq. 1.40. In the same way the stiffness matrix for linearly elastic solid is
given by
Krs : =1
4
∫∫∫V
∑ij
∑km
(ψ
ri,j + ψ
rj,i
)Cijkm
(ψ
sk,m + ψ
sm,k
)dV
=∑p,q
z(r)p
1
4
∫∫∫V
∑ij
∑km
(ψ
p
i,j + ψp
j,i
)Cijkm
(ψ
q
k,m + ψq
m,k
)dV z(s)q
= ZTKZ (1.44)
which demonstrates (see Eq. 1.37) that this diagonal matrix is identical to that appearing in
Eq. 1.40. Finally, for the generalized force one has
er :=⃝∫∫
St · ψrdS =
∑i
z(r)i ⃝∫∫
St · ψidS or e = ZTe (1.45)
which are identical to the generalized forces defined in Eq. 1.41.
The conclusions are that the change of lagrangian co-ordinates (see also Section 1.2)
qn =∑m
qmz(m)n or q =
∑m
qmz(m) = q1z(1) + q2z
(2) + ... = Zq (1.46)
and the change of the corresponding base functions given by Eq. 1.42, have the same effect to
yield the diagonalized (linear) lagrange equation of motion, as
u(ξα, t) =∑n
qn(t)ψn(ξα) =
∑m
qm(t)ψm(ξα) =∑m,n
qm(t)z(m)n ψn(ξ
α) (1.47)
1.2.2 Comments
Consider the two approaches to the study of flutter that were mentioned above. The first –
transforming the finite-element equations by diagonalizing the linear portion of the equation – is

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 25
fully equivalent to substituting Eq. 1.29 (or 1.39) into Eq. 1.28 and premultiplying the resulting
set of equations by the matrix [z(p)r ]T (process (i) in the observation at the end of last Section).
On the other hand the second approach – finding the approximate modes of vibration and using
these as the base functions in the expression for the displacement – is fully equivalent to obtaining
directly the equations for qr; one may then use Eq. 1.30 in the expression for the coefficients
(process (ii) in the above section) to prove the equivalence of the two approaches. Therefore, as
mentioned in the beginning of this Section, the classical approach (i.e., using the finite-element
method to find approximate modes of vibration and using the Lagrange equations of motion for
these modes) is equivalent to solve the finite-element equations for the dynamics of the airplane
by first diagonalizing the linear portion of the equations, and then reducing the size of the
problem by truncating the equations as to eliminate the high-frequency terms. This implies
that, of course, if the finite-element formulation converges, then the approximate-vibration-
mode formulation converges as well. Note that, the rate of convergence of the expression for
u =∑
n ψnqn, for the (approximated) vibration modes is typically higher than that for the finite-
element approximation, i.e., u =∑
n ψnqn (however, this is not necessarely true, especially if
the low-order derivatives of the displacement are discontinuous, see, for instance, Gottlieb and
Orszak, 1977)
It should be noted that, in the case of an unrestrained structure, such as an airplane, there
exist an additional problem that was not included in the above discussion. For an unrestrained
structure, the rigid-body modes may be obtained as linear combinations of the finite-element
base functions (this is not true for the vibration modes, because of the orthogonality conditions).
This implies that the Lagrange equations for the rigid-body modes (conservation of momentum
and angular momentum) may be obtained as a suitable linear combination of the equations
for the elastic degrees of freedom. One way to eliminate this ambiguity is to impose that the
displacement u is orthogonal to the rigid-body modes. One of the advantages of the vibration-
mode formulation is that this last condition is automatically satisfied. This issue is further
discussed in Morino and Baillieul (1987).
1.3 ODE for Structural Dynamics
Let us consider the truncated (finite dimension N) and linearized Lagrange equations of motion,
e.g., as given by the Finite Element method and presented in Sec. 1.2.1
M¨q + Kq = e q(0) = q0 ˙q(0) = ˙q0 (1.48)
and the associated eigenproblem in the form given by Eq. 1.34. As the eigenvectors are or-
thogonal in the sense given by the Eqs. 1.36 and 1.37, one can legitimately express the solution

26
as
q = Zq = z(1)q1 + z(2)q2 + ...+ z(N)qN (1.49)
and then, premultipling Eq. 1.48 by ZT one obtains
ZTMZ ¨q+ ZTKZ q = ZTe (1.50)
or (using the same orthogonality relationships 1.36 or 1.38) the diagonalized problem
mn¨qn + knq = en n = 1, 2, ..., N (1.51)
with e := ZTe. The first part of this section is dedicated to the solution of free problem associated
to Eq. 1.48 and the second to the driven one using the associated standard eigenproblem.
1.3.1 Second order systems of linear ODE for structural problems: free un-damped response
Let us consider the free response problem for Eq. 1.48 with e ≡ 0: considering the co-ordinate
transformation given by Eq. 1.49 also for the initial conditions, one has at t = t0
q0 = Zq0 ˙q0 = Z ˙q0 (1.52)
and then Eq. 1.51 gives
qi(t) = q0i cos√λit+
˙q0i√λi
sin√λit (1.53)
or
q(t) = C(t)q0 +Ω−1S(t) ˙q0 (1.54)
where the following diagonal matrices are introduced
C(t) :=
cos√λ1t
cos√λ2t
. . .
cos√λN t
S(t) :=
sin√λ1t
sin√λ2t
. . .
sin√λN t
Ω :=
√λ1 √
λ2. . . √
λN
Then, the solution of the original homogeneous problem is given by
q(t) = Z[C(t)Z−1q0 +Ω−1S(t)Z−1 ˙q0
](1.55)

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 27
Note that, because of the orthogonality relationshups given by Eq. 1.38, Z−1 in Eq. 1.55 is
given by
Z−1 = M−1ZTM (1.56)
where M−1 is a diagonal matrix as well: thus, an inverse operation for the matrix Z is not
required at all. Note that if one consider for the homogeneous problem the initial conditions
q0 = z(m) ˙q0 = 0 (1.57)
one obtains by Eq. 1.55
q(t) = z(m) cos√λmt (1.58)
which demonstrates that the eigenvectors and the eigenvalues for the discrete (or discretized) dy-
namical system described by linear second order homogeneous differential equations correspond
to the physical concept of natural modes and frequencies of vibrations: i.e., if the eigenvector
z(m) (namely, the shape function ψ(m)
(ξα) :=∑
n z(m)n ψ
(n)(ξα)) is imposed as initial condition
of a free response problem, the system oscillates with the same shape in space and with a simple
harmonic function in time with (angular) frequency equal to the corresponding eigenfrequency.
1.4 Second order systems of linear ODE for structural problems:driven undamped response
Next, consider the driven problem given by the diagonalized Eq. 1.51: the solution is
qi(t) = qi0 cos√λit +
˙qi0√λi
sin√λit +
∫ t
0
sin√λi(t− τ)√λi
ei(τ)dτ (1.59)
This can be demonstrated as shown in the following. Indeed, it is sufficient to show that Eq.
1.59 satisfies the initial conditions and the Eq. 1.51. However, this may be also demonstrated
by means of the Laplace transform method. Indeed, the Laplace transform of the generic of Eq.
1.51 gives
s2˜qi − sqi(0)− ˙qi(0) + λi˜qi =˜eimi
(1.60)
where the transformed quantities have been denoted with the symbol . Thus, one obtains
˜qi =s qi(0)
s2 + λi+
˙qi(0)
s2 + λi+
˜eimi(s2 + λi)
(1.61)
or, going-back in the time domain and considering the convolution theorem,
qi(t) = qi0 cos√λit +
˙qi0√λi
sin√λit +
∫ t
0
sin√λi(t− τ)
mi
√λi
ei(τ)dτ (1.62)

28
i.e., the final solution in the original co-ordinates11
q(t) = Z
[C(t)Z−1q0 +Ω−1S(t)Z−1 ˙q0 + M−1
∫ t
0Ω−1S(t− τ)ZT e(τ)dτ
](1.64)
Note that if one take the Laplace transform of Eq. 1.48 with initial conditions equal to zero,
one obtains
˜q = H(s)˜e with H(s) =(s2M+ K
)−1(1.65)
i.e., an algebraic relationship between the Laplace transform of input vector (˜e) and the output
vector (˜q) trought the transfer function matrix H(s). Moreover, note that considering the Laplace
transform of Eq. 1.64 and the convolution theorem, but including now also generic initial
conditions, one has
˜q(s) = Z
. . .
s
s2 + λn. . .
Z−1 q0 + Z
. . .
1
s2 + λn. . .
Z−1 ˙q0
+Z
. . .
1
mn(s2 + λn). . .
ZT ˜e (1.66)
where Z−1 = M−1ZTM.
Thus, in the case of initial conditions equal to zero, one can identify the transfer-function
matrix of the system as given in term of the system eigenproblem, i.e.,
H(s) = Z L[M−1Ω−1S(t)
]ZT = Z
. . .
1
mn(s2 + λn). . .
ZT (1.67)
or
Hij(s) =N∑r=1
z(r)i z
(r)j
mr(s2 + λr)(1.68)
Finally, note also that the Frequency Response Function system matrix H(ω) can be obtained
evaluating the transfer matrix H(s) in the restricted domain s = jω. It is worth to show the
11It is worth noting that the matrice Z−1 in Eq. 1.64 or Eq. 1.55 can be evaluated, avoiding the inversionprocess, by means of considering Eq. 1.38, or
Z−1 = M−1ZTM (1.63)
where Mij = δijmi

Aircraft Aeroelasticity – L. Morino F. Mastroddi c⃝ 29
specific meaning assumed by a generic element Hij of such a matrix. Indeed, if one considers
an input vector with a only one element ej(t) not equal to zero and of harmonic type like
ej(t) = sin(Ωt) (1.69)
the Laplace transform will be given by ej(s) =Ω
s2+Ω2 . Thus, the system response for the i−thoutput component is
˜qi(s) = Hij(s)Ω
s2 +Ω2= ˜qi(s)trans +
˜qi(s)steady ≃ρ
s− jΩ+
ρ
s+ jΩ(1.70)
where ˜qi(s)trans indicates the part of the response related with the system (stable) poles whereas
˜qi(s)steady the other one related with the input whose contribution has been considered in the
following: in fact, the residuals ρ and ρ are given by
ρ =Hij(jΩ)
2jρ =
Hij(−jΩ)−2j
=H∗
ij(jΩ)
−2j= ρ∗ (1.71)
Therefore, noting that Hij(−jΩ) ≡ H∗ij(jΩ), one has in the time domain
qi(t)steady = L−1
[Hij(jΩ)
2j(s− jΩ)−
H∗ij(jΩ)
2j(s+ jΩ)
]= |Hij(jΩ)| sin
(Ωt+Hij(jΩ)
)(1.72)
where Hij(jΩ)
is the phase of the complex number Hij(jΩ). The previous result can be
interpreted as in the following:
the complex value assumed by frequency response function Hij(jΩ) represents, with
its modulus and phase, the modulus and the phase of the i-th output when a simply
harmonic input with angular frequency equal to Ω, unit amplitude, and zero phase is
applied to the j-th component only.
Note that the previous result can be extended to the case of multiple input but with the same
exciting frequency, namely for an input of type
e(t) = w sin(Ωt)
Indeed, in this case for the generic i−th component of the output vector one would obtain (see
Eq. 1.65)
˜qi(s) = Hi1(s)Ω
s2 +Ω2w1 +Hi2(s)
Ω
s2 +Ω2w2 + ...HiN (s)
Ω
s2 +Ω2wN = ˜qi(s)trans +
˜qi(s)steady
≃ ρis− jΩ
+ρi
s+ jΩ

30
where the last approximation is valid when only the steady component of the response is taken
into account. Again, the residuals can be evaluated considering the previous equation
ρi =N∑j=1
Hij(jΩ)wj
2jρi =
N∑j=1
Hij(−jΩ)wj
−2j=
N∑j=1
H∗ij(jΩ)
−2j≡ ρ∗i (1.73)
and, therefore, going back to the time domain, one can obtain for the steady oscillatory response
qi(t)steady =N∑j=1
wj |Hij(jΩ)| sin(Ωt+Hij(jΩ)
)(1.74)
As a natural consequence of the frequency response function interpretation, one can consider
the concept of resonance of a dynamical system: indeed, if one consider as input for the system
the load
e(t) = w sin(Ωt) (1.75)
with Ω = ωm, i.e., equal to the m− th angular natural frequency, the steady sinusoidal response
generally will diverge in that the m − th fraction in Eq. 1.67 will go to infinitive when s = jΩ
as requested for determining the harmonic response q(t).12
The resonant conditions might be sometimes voluntary induced in some applications: indeed,
this is the case of the direct modal appropriation approach in the experimental modal analysis.
It consists of loading with a harmonic load a structure in order to obtain a harmonic response
composed by only a selected natural mode of vibration. This goal can be easily achieved for,
e.g., the k−th mode using, of course, a simply harmonic load with angular frequency Ω = ωk
and a load space distribution (see Eq. 1.67) such that
e = α sin (ωkt) Mz(k) (1.76)
with α arbitrary unessential constant. Indeed, Eq. 1.67 together with the interpretation of the
frequency response functions, clearly shows how in this case the response would be given by the
vibration of the k−th mode only.
On the other hand, the resonance condition might be simply avoided keeping the same har-
monic law for the load (i.e., sin(Ωt) with Ω ≃ ωk) but using a space distribution for the load
w orthogonal to the k − th eigenvector: indeed, in this case (see Eq. 1.67) the explosive of the
resonant mode may be cancelled.
12Indeed, this is true when the damping is not present in the model: the presence of damping transforms theFRF curves to have a maximum point instead of a singular one.

Bibliography
[1] T. A. Cruse, Boundary Element Analysis on Computational Fracture Mechanics, Kluwer
Academic Press, 1988.
[2] J. W. Dettman: Mathematical Methods in Physics and Engineering, Dover Publications,
Inc., 1988.
[3] D. J. Ewins: Modal Testing: Theory and Practice, Research Studies Press LTD, John Wiley
& Sons, 1984.
[4] J. Inman: Engineering Vibration, Prentice Hall, Englewood Cliffs, New Jersey, 1996.
[5] K. G. McConnell: Vibration Testing: Theory and Practice, John Wiley, 1995.
[6] L. Meirovitch: Elements of Vibration Analysis, McGraw Hill, 2nd ed., 1986.
31

32