Axisymmetrical topology optimization of an FPSO main...
108
Axisymmetrical topology optimization of an FPSO main bearing support structure Master thesis Ing. E. van Vliet, 4094654 Faculty of Mechanical, Maritime and Materials Engineering (3ME) Department of Ship Structures and Hydromechanics [email protected]
-
Upload
truongxuyen -
Category
Documents
-
view
219 -
download
0
Transcript of Axisymmetrical topology optimization of an FPSO main...

Axisymmetrical topology
optimization of an FPSO main
bearing support structure
Master thesis
Ing. E. van Vliet, 4094654
Faculty of Mechanical, Maritime and Materials Engineering (3ME)
Department of Ship Structures and Hydromechanics


Axisymmetrical topology optimization of an
FPSO main bearing support structure
v2.1
E. van Vliet
Committee:
Prof. Dr. Ir. M. L. Kaminiski (chairman)
Dr. Ir. A. Romeijn
Dr. Ir. M. Langelaar
Ir. J. van Nielen
Ir. R. ten Have
03-03-2015
Delft University of Technology
Faculty of Mechanical, Maritime and Materials Engineering (3ME)
Department of Ship Structures and Hydromechanics

Contents
Abstract 6
Prologue 9
Symbols and acronyms 13
1 Introduction 17
1.1 A brief history . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 FPSO fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Thesis subject and goals 21
2.1 Problem description . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2 Problem approach . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 A step toward topology optimization . . . . . . . . . . . . . . . . 26
2.3.1 Optimization potential . . . . . . . . . . . . . . . . . . . . 26
2.3.2 Why topology optimization? . . . . . . . . . . . . . . . . 28
2.4 Goals and boundaries . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5 Thesis structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3 Mathematical modeling 35
3.1 Formulation of main problem . . . . . . . . . . . . . . . . . . . . 35
3.1.1 Objective function . . . . . . . . . . . . . . . . . . . . . . 36
3.1.2 Relative stress constraints . . . . . . . . . . . . . . . . . . 37
3.1.3 Load preservation constraints . . . . . . . . . . . . . . . . 38
3.2 Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.1 MMA approximation . . . . . . . . . . . . . . . . . . . . . 40
3.2.2 Lagrangian duality . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Topological derivatives . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.1 Objective derivative . . . . . . . . . . . . . . . . . . . . . 45
3.3.2 Suppressing intermediate densities using SIMP . . . . . . 45
3.3.3 Constraint derivatives . . . . . . . . . . . . . . . . . . . . 46
3.3.4 Analysis of penalization . . . . . . . . . . . . . . . . . . . 48
3

3.3.5 Derivatives for arbitrary orientation (DAO) . . . . . . . . 48
4 Test model verification 52
4.1 Arbitrary orientation with stress and displacement constraint . . 53
4.2 Displacement and relative stress constraints . . . . . . . . . . . . 53
4.3 Coupled design spaces with relative constraints . . . . . . . . . . 58
5 Application to main bearing support structure 61
5.1 Finite element modeling . . . . . . . . . . . . . . . . . . . . . . . 62
5.1.1 Element description . . . . . . . . . . . . . . . . . . . . . 62
5.1.2 Modeling and discretization . . . . . . . . . . . . . . . . . 63
5.1.3 Main bearing modeling . . . . . . . . . . . . . . . . . . . 65
5.2 General programming for all loadcases . . . . . . . . . . . . . . . 67
5.2.1 Topological derivatives . . . . . . . . . . . . . . . . . . . . 67
5.2.2 Displacement decomposition . . . . . . . . . . . . . . . . . 71
5.2.3 Coefficient ratios . . . . . . . . . . . . . . . . . . . . . . . 73
5.2.4 Scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2.5 Initial feasibility . . . . . . . . . . . . . . . . . . . . . . . 75
5.2.6 Asymptotal increase . . . . . . . . . . . . . . . . . . . . . 75
5.2.7 Ansys-Matlab coupling . . . . . . . . . . . . . . . . . . . . 76
5.3 Additional programming for bilateral loadcases . . . . . . . . . . 78
6 Results 79
6.1 Axisymmetric loadcase . . . . . . . . . . . . . . . . . . . . . . . . 80
6.2 Bilateral loadcase . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
7 Conclusions 90
7.1 Program stability and convergence . . . . . . . . . . . . . . . . . 90
7.2 Resulting structure . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.3 Increased main bearing loads . . . . . . . . . . . . . . . . . . . . 95
7.4 Evaluation of set goals . . . . . . . . . . . . . . . . . . . . . . . . 96
8 Recommendations and contingencies 98
8.1 Constraints for failure modes . . . . . . . . . . . . . . . . . . . . 98
8.2 Constraints in multiple radial planes . . . . . . . . . . . . . . . . 99
8.3 Incorporate pre-existing structure . . . . . . . . . . . . . . . . . . 99
8.4 Lower bearing modeling . . . . . . . . . . . . . . . . . . . . . . . 100
8.5 Contact elements . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8.6 Radial basis functions . . . . . . . . . . . . . . . . . . . . . . . . 101
8.7 Removal of obsolete elements . . . . . . . . . . . . . . . . . . . . 101
8.8 Pre-tension adjustment . . . . . . . . . . . . . . . . . . . . . . . . 102
Index 106
4

(This page is left blank intentionally)

Abstract
Keywords: structural mechanics, topology optimization, relative constraints, method
of moving asymptotes, convex approximation, primal-dual Newton method, Lagrangian
duality, axisymmetric structures, offshore structures, FPSO, solid isentropic material
with penalization, large diameter bearings, harmonic elements, finite element method,
linear static analysis, bilateral loadcases.
Unevenly distributed loads on rollers within an FPSO turret main bearing causes
increased wear, failure and possible down-time of the weathervaning system.
They are caused by the relative deformation between the inner and outer bear-
ing ring. In what manner these deform depends on the geometry of the bearing
itself, but also in large part on the supporting structure: the turret casing and
the turntable. Bluewater Energy Services (BES) is interested in a structural so-
lution to this problem. However, structural problems with these type of relative
constraints are far from esoteric (the industry has shown attempted solutions
of both stiff and flexible nature) and till date, the conventional approach is to
launch an iterative design process between the company and the bearing man-
ufacturer, starting at some chosen initial design. Since this initial design itself
was not designed for -or possibly already had problems with- roller load distri-
bution, one cannot be guaranteed a solution, let alone an optimal design.
This thesis proposes a new perspective on this problem using topology opti-
mization. By combining the method of moving asymptotes (MMA), structural
axisymmetry and relative constraints, a program is written which can determine
a feasible, optimal solution in an iterative fashion. This solution represents
the topology of the structures adjacent to the main bearing (i.e. part of the
turntable and part of the turret casing) such that the rollers remain uniformly
loaded. By incorporating a class of harmonic elements, the user is not limited
to mere axisymmetric loadcases, but can also apply any preferred type of bilat-
eral loadcase. Effects of stress concentration, buckling and fatigue are neglected.
The resulting algorithm proved to be stable and showed convergence in all con-
6

straints (relative and absolute alike) and the demand for a solid and isotropic
solution using the SIMP method. This ensures the calculated topological deriva-
tives provide accurate information as required by MMA. A few iterations of a
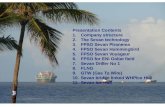
bilateral loadcase are shown in figure 1 as an example of how the algorithm dis-
cards elements from the design domain. Two types of loadcases were examined:
1. An axisymmetrical loadcase where only the gravitational load of the turntable
and risers are modeled. In this model there is no tangial structural re-
sponse.
2. A bilateral loadcase where, besides gravitational loads, overturning and
transverse loads are applied. In this model tangial structural response
does occur.
In both types of loadcases (i.e. axisymmetric and bilateral) the converged so-
lutions showed a lot of structural similarities, among which a tubular structure
increasing the torsion resistance of the inner bearing ring (see figures 2a and
2b). Additional numerical models show that, indeed, this type of geometry is
optimal when trying to limit torsional deformation. The support for the outer
ring is different in both cases due to the difference in nature between the load-
cases.
The product of this thesis is an optimization program that is capable of han-
dling multiple relative constraints in an axisymmetrical structure subjected to
non-axisymmetrical loadcases. Further research has to be done in order to pro-
vide a more accurate and definite topology, in which the two most important
steps are the modeling of the lower bearing and the inclusion of constraints in
multiple radial planes (using derivative convolution) such that the main bear-
ing is evaluated at multiple key points. These steps are not too difficult to
overcome, but, due to time imitations, they are outside the scope of this the-
sis. More elaborate contingencies include subjecting the model to stress and
fatigue constraints and model the main bearing rollers with contact elements.
By incorporating these constraints, topology optimization can be considered a
serious candidate for solving problems of relative nature, and one can find this
relativity in other places than just the main bearing; also the lower bearing and
the swivelstack will probably be interesting subjects. Since topology optimiza-
tion is a rather unknown concept within the offshore industry, a company such
as BES might stand a lot to gain in expanding and utilizing this type of knowl-
edge, especially since there are clear indications that conventional engineering
has difficulty dealing with relative constraints.
7

Figure 1: Iteration 2, 9, and 40 of the bilateral loadcase. Be-
tween the turntable on the left and the casing on the right we
see a solid black square which represents the main bearing.
(a) Solution of axisymmetrical loadcase. (b) Solution of bilateral loadcase.
Figure 2: A close up view of the axisymmetric and bilateral
solution x(κ). Clearly, the solution shows to favor a tubular
structure around the inner main bearing ring. The solid square
in the center represents the main bearing itself (which remains
untouched by the algorithm).
8

Prologue
Whether it is common or not to write a prologue for a master thesis I don’t
know, but studying has become a significant part of my life, so I guess I’m
pretty much obliged to. I got the call from Bluewater only after I already half-
committed my graduation to a third party. If they would invite me that same
day, I told them, I would be willing to reconsider. So that day we started what
is now marking the end to a long and rather strenuous student carrier. ‘What
better way to end with some fun, axisymmetrical topology optimization?’, I
hear you think. And indeed you are correct -sir- as long as, while programming,
stoicism outlasts your error-induced rancor. There is no guarantee it will, not
without the constant support of friends and family, but I’ll save that for the
end. One exception though, and it’s a cliche but it doesn’t count when it’s true:
Thank you, for years and years of continued unconditional support and love,
representing altruism at its finest
mom and dad
Much of what you are holding right now is math, so if that doesn’t quite spike
your interest, in the following I will try to explain this thesis in plain English.
Structures need to be designed, then build. If you want to sit, you design a
chair. If you want to fish, you design a fishing pole. A chair is stiff, a fishing
pole is flexible. If a chair were flexible you will find a large portion of yourself
laying on the floor rather than sitting in the chair. If you design a stiff fishing
pole it will break in half and you will sob inconsolably. There are, however,
structures that do not intrinsically demand either stiffness or flexibility. They
need a bit of both, or a lot of both, or some specific ratio, or... well, you don’t
really know, that’s the point. In a sense, common human intuition sometimes
falls short when designing these structures, just as it does in our structure: the
‘FPSO main bearing support structure’.
I’m not going to tell you what it is or what it looks like, and Google probably
won’t help you much either. You only need to know that it has a problem, and
that that problem get worse when you make the structure bigger. The thing is:
9

we really want to make it bigger though, and as a starting point we take an old,
smaller design and make it bigger. Then, to fix our emerging problem, we make
slight modifications to the new and bigger design. Sounds familiar? That’s
because your body was ‘designed’ in somewhat the same fashion, by means of
evolution.
When one mentions evolution, the assumption usually is that it comes up with
the best answer to all of natures’ hardships and competitions. In a lot of cases,
yes, it does. In others... not quite. Conveniently, a whole string of these bad
designs is mentioned in the ‘Greatest Show on Earth’ by R. Dawkins. I could
have chosen the human eye as an example 1, but consider that one homework.
Instead, let’s look at a giraffe.
In mammals, the ‘recurrent laryngeal’ nerve (RLN) is a nerve that connects the
larynx 2 to the more central ‘vagus’ nerve which runs up to the brain. The
RLN branches off the vagus nerve just above the aorta, loops around it and
heads back up to join the larynx. This means that, in humans, the RLN makes
a small detour of a several centimeters rather than moving from point A to B
in a straight line. Compared to the whole complexity of your body, one might
brush this off as being fairly insignificant. But when we examine the giraffe
we see a RLN that extended as far as 5 meters in length! Not only a waste of
resources but also an unnecessary increased risk of damaging the nerve, not to
mention the 10 meters (down and up the full length of the neck) signals have to
travel when sent by the brain. Perhaps, a consequence could be that “despite
possession of a well developed larynx and a gregarious nature, the giraffe is able
to utter only low moans or bleats”, as mentioned by Dawkins.
Somewhere down the evolutionary tree humans and giraffes share a common
ancestor, a creature that did not look anything like a human or a giraffe but did
function as an initial ‘design’ 3 for both. As the neck of the ancestor steadily
grew, the RLN, which was stuck around the aorta, had no option but to extend
along with it. The current giraffe might still function satisfactory as an animal,
but it will never be an optimum since all an engineer has to do to improve the
design is replace the idiotic 5 meter nerve with a simple 30 odd centimeter one.
Evolution cannot do so; it can only move forward with what is already there,
missing potential optima that might have been exploited. Hypothetically, if
trees were to continuously extend in length over time, there comes a point that
the giraffe reaches a physical boundary from whereon it can no longer keep up.
1Whose design can be compared to installing an electric socket on the wrong side of the
wall, then drill a hole through that same wall to feed a wire through in order to plug it in.2The organ commonly known as the ‘voice box’, considering its link to sound production3In context I chose to call it design. The ancestor itself was, of course, never actually
‘designed’ but also came about by means of natural selection.
10

This boundary could be the limit on neck weight, or maybe it could actually be
RLN which at a certain length impedes the animals functionality. In this newly
developed evolutionary situation, perhaps a monkey appears to be the optimum
solution in reaching the top of the tree. The ancestor turned out to be flawed
as an initial design for a giraffe.
Enough of this biological digression. Where am I going with all of this? Well,
by taking an existing structure, enlarge and subsequently modify it to adhere to
certain characteristics, engineers are basically following the same evolutionary
path. But, as we have seen in the giraffe, this might in some aspects result in
absurd and wasteful designs. Also, it will probably make you hit a ceiling earlier
than needed, meaning that there comes a point that, no matter what you do, you
cannot improve performance without a complete overhaul. To an engineer this
should at least raise some suspicion when applying this empirical strategy, es-
pecially when the purpose of, or demand on a structure slowly changes overtime.
Let’s circumvent this evolutionary design path. Let’s switch off human intuition.
The number of ways to design a structure is near infinite, and our brains do not
have the capacity to evaluate even a fraction of them. A computer, although
also limited, hugely extends this capacity, and it doesn’t have any interference
from intuition or a bias towards a certain configuration. Letting a computer
design a structure for you is a special branch within engineering and mathe-
matics called ‘topology optimization’ 4. Basically, you start off with a volume
consisting of a large number of small blocks (in this thesis around 12,000 +)
and tell the computer to start removing blocks without the structure falling
apart. Consider it a very elaborate game of Jenga, but there are a few differ-
ences. For one, besides the structure not falling apart we might add additional
demands, such as how much or in what manner it may deform under pressure;
and two, the computer may not only remove blocks but also add them when
needed. We let the computer do the designing for us, and as a snack, we get to
glance inside the ‘thoughts’ of a computer, see what structures it is considering
before discarding them and moving on to yet other, better designs. We do not
anticipate the computer’s decisions. If we could, we might as well design the
structure ourselves and avoid all these programming efforts; they would have
become obsolete. The appealing thing, to me, is that no human can tell what
the outcome will be. In a sense, we’ve created a self-governing brain5; a brain
whose sole purpose is to come up with the best structure given the most com-
plex of demands. There has been substantial development in this field, and the
4Derived from the Greek word ‘topo’ meaning place. In this context in means where to
put material, or how to distribute it throughout ‘Euclidian’ space.5In case you’re wondering what such a brain looks like on paper, skip to the appendices B
and C
11

flexibility of algorithms in describing different scenarios and demands is ever
growing. Hopefully, this thesis contributes to that effort.
I’d like to add one more thing before moving on to the thesis. There is a group
of people who had to hear me complain about (trivial) things the past four
(or far more) years: Robert Wouters, Joran van Aart, Thijs Muskens, Jolanda
Jacobs, Henk-Jan Bosman, Erik Verboom, Julian de Kat, Elodie Mendels, Pien
Minnen and Malte Verleg. Thanks for listening; I probably would’ve gone nuts
by now if it wasn’t for you.
12

Symbols and acronyms
Latin symbols
Symbol Description Defined
a Mode number
b Mode number
B Set containing all link180 elements modeling
main bearing rollers
figure 5.2
B Strain-displacement matrix (5.6), (3.28)
c Contribution factor; transforming global to lo-
cal displacements
(5.3)
e Amplitude vector for physical harmonic dis-
placements
(??)
^e Amplitude vector for virtual harmonic displace-
ments
(??)
E Elasticity vector; containing Young’s modulus
all elements within Θ
(3.20)
E Elasticity matrix; describing the deformation of
an element under load
(??)
Eg General elasticity (210 GPa)
f0 Objective function (3.2)
fm Constraint functions with m ∈ N and m 6= 0 (3.6), (3.7)
fρ Dimensionless unit load in DOF number ρ (3.22)
g Lagrangian dual fuction (3.12)
g Local displacement vector (5.4)
h Double harmonic vector (??)
H Harmonic primitives vector (??)
i Constraint number6
I(n) Identity matrix with size n
j Element number
k Iteration number
6unless otherwise specified
13

k Elemental stiffness matrix
K Global stiffness matrix
L Roller length vector (5.2)
L Lagrangian function (3.10)
m Total number of constraint functions
n Total number of design variables (number of el-
ements in Ω)
p Penalization factor (3.20)
p Set of mode numbers used in physical loadcase
P Stiffness reduction factor
P Main optimization problem (3.1)
R Radial contribution (3.3)
s Scaling vector (5.12)
S MMA approximated subproblem (3.9)
t Boolean vector identifying common harmonic
identities
(??)
T Transformation matrix (3.27)
u Displacement
u Displacement vector (either global or elemental)^u Virtual displacement vector (either global or el-
emental)
(3.25)
^
U Virtual displacement matrix (concatenation of
different^u’s corresponding to different unit
loads
(5.4)
v Horizontal displacement component of u (3.29)
v Set of mode numbers used in virtual loadcases
w Vertical displacement component of u (3.29)
W Dual objective subproblem (3.16)
x Design variable or elemental density (3.20)
x Design variable vector (3.20)
14

Greek symbols
Symbol Description Defined
β Link angle (3.26)
Γ Feasible domain
∆ Difference
ε Strain
ζ Displacement amplitude vector (??)
η Number of DOFs in an element
θ Angle about the axis of axisymmetry
Θ Domain containing all elements with FE model figure 5.2
ι(n) Vector of size n with all elements equal to 1
κ Total number of iterations to reach convergence
κ Vector containing rearranged stiffness coeffi-
cients
λ Vector of Lagrangian multipliers
Π Domain containing all plane elements that
model the main bearing
figure 5.2
ρ DOF number
σ Stress
τ Constraint tolerance (3.1)
Υ Domain containing relative stress link-elements figure 5.2
Φ Domain containing all bearing affiliated ele-
ments, both link and plane elements
figure 5.2
χ Vector containing all density ranges of all design
variables
χ−
Lower density boundary
χ Upper density boundary
ω Boolean vector identifying common frequencies (??)
Ω Domain containing all design variables xj figure 5.2
15

Acronyms
BES Bluewater energy services
DAO Derivatives for arbitrary orientation
DOF Degree of freedom
FEA Finite element analysis
FEM Finite element method
FPSO Floating storage production and offloading
KKT Karush-Kuhn-Tucker (conditions)
MMA Method of moving asymptotes
OTC Offshore Technology Conference
SAO Sequential approximate optimization
SIMP Solid isotropic material with penalization
SLP Sequential linear programming
SPM Single point mooring
TOP Topology optimization
16

Chapter 1
Introduction
1.1 A brief history
The ‘peak oil theory’ is being disputed more and more frequent as the projected
maximum petroleum extraction in the year 2020 is probably not met. In late
2013 a KPMG publication [10] stated that a receding oil and gas market is till
date unfounded, backed by the fact that across the globe considerable invest-
ments are made off the coast of the US, Brazil and Northern Australia. The
Artic regions are expected to undergo similar developments in the no so distant
future, and advances in the continues struggle with ice-induced problems are
made. The recent decrease in oil prices is supply-triggered, rather than a de-
crease in demand. This increase in supply, without losing ourselves in too much
speculation, is in large part caused by recent political instabilities in, among oth-
ers, the Middle East. The current demand itself was anticipated by the Interna-
tional Energy Agency (IEA) which also states that the global energy market is
expected to rise by a third between 2011 and 2035. The development of sustain-
able energies are not yet able to cope with a demand of this magnitude, hence,
fossil fuels are the only candidate to fill in the gap. Offshore developments will
naturally play a substantial role -certainly considering the controversy related
to shale gas extraction- and consequently own of its key components, the FPSO.
An FPSO is a ship-shaped vessel that remains moored at sea for moderate peri-
ods of times while operating a pre-developed subsea oil or gas field. The abbre-
viation FPSO (Floating Production Storage and Offloading) has been steadily
gaining more and more recognition since its first application in 1977; the Shell
Castellon, an FPSO operating an oil field in 117 m of water in the Spanish
Mediterranean. It stems from the vessels ability to process (produce) hydro-
carbons and storing them for certain amounts of time before being offloaded
to a shuttle tanker. The term floating indicates that the vessel does not need
17

to be supported other than its own buoyancy. The need for deeper and ever
remote oil and gas field development has proved to catalyze extensive research
in the technology concerning these vessels, slowly pushing the concept of FPSO
towards offshore energy market dominance.
As far back as 1891, the first submerged oil wells were developed in fresh water
lakes in Ohio, USA, using small platforms supported by piles driven into the
lake bed. After the Second World War the first permanent offshore installations,
pioneered by Kerr-McGee Corporation, struck oil beyond the sight of land. In
both cases the dependency on land required infrastructure that connected both
offshore and onshore facilities; pipelines had to be built in order to transport
oil ashore for further processing and logistics. This remained the case up until
developments in both economy and engineering favored ventures that further
extended the borders known to the offshore sector. This consequently launched
the era of floating production, which began in 1975 with the Transworld 58
becoming operational, a converted semi-submersible drilling rig deployed in the
Argyll field off the coast of the UK. From here on the floodgates were opened,
spawning various types of FPS structures: compliant towers, spars and tension
leg platforms, added to the existing semi-submersibles and FPSO-like vessels.
The latter without doubt the industry’s favorite, whereas 63 percent of all FPS
installations are accounted for by FPSOs, a grand total of 186 worldwide based
on the 2013 statistics.
Among recent FPSO records are the Pioneer, which operates in record water
depth of 2.6 kilometers (8,520 ft.), and the Kiszomba with a storage capacity
of 2.2 million barrels (350,000 m3). The Royal Dutch Shell ordered the largest
vessel ever constructed: the Shell Prelude FLNG, build by Samsung Heavy In-
dustries. The 488 meter (1,601 ft.) vessel, expected to weigh approximately
600,000 tonnes when operational, is designed to extract liquefied natural gas
(LNG) from the Browse Basin, 200 kilometers off the coast of north Australia.
It weighs more than five aircraft carriers combined.
1.2 FPSO fundamentals
A key feature of conventional FPSOs is the turret, normally found in the bow
of the vessel. In contrary to spread moored vessels, which have multiple con-
nections to the seabed at the bow and stern, the turret is the only component
physically anchored. The FPSO can rotate (also known as weathervane) freely
around the turret, while subjected to the prevailing environmental conditions.
Since all anchor chains are attached to the submerged part of the turret, such
18

a system is called a single point mooring (SPM) system. The advantage of
weathervaning is that it reduces the forces exerted on the anchor chains and
connections by minimizing the roll and heave motions. Spread moored systems,
while maintaining their angular position regarding wind, waves and/or swell,
might be subjected to enormous forces when confronted with a certain angle,
considering their significant hull surface area. SPM turret systems allow the
vessel to orientate the bow of the FPSO facing oncoming weather, thereby re-
ducing the loads on the mooring system. This also proves an advantage during
offloading procedures: shuttle-tankers may connect at the stern of the FPSO
while the weather may safely attempt to push the vessels apart and reducing
the change of collision. As a consequence offloading procedures might continue
in harsher weather conditions.
Many FPSO hulls are conversions of surplus tankers; tankers that had a deck
structure suitable for carrying a process facility. Conversion meant that acquir-
ing an FPSO was relatively cheap and significantly faster than building from
scratch, which certainly added to the popularity in the early years of these off-
shore installations. There are, however, certain drawbacks to converting old
tankers, the most important of which is the restriction on the weather condi-
tions and water depth. For these conditions, the demands for integrating the
turret into the hull can become quite elaborate and is therefore usually not eco-
nomically feasible. As a result, initially, FPSOs were designed to produce small
to medium sized oil fields in remote locations, ranging from moderate to deep
waters, where pipelines and fixed infrastructure would prove inefficient. With
the development of turret mooring and new-build ship-shaped hulls the number
of FPSOs operating in very deep water and harsh weather conditions has grown
substantially. In short, new build FPSO are designed keeping in mind roughly
four requirements:
1. Installation of the turret (usually in the bow).
2. Oil storage capacity.
3. Space for process facilities and accommodation.
4. Displacement and ballast capacity as to reduce the effect of motions on
the mooring and riser systems.
Nowadays, the modular-based FPSO construction is very much standardized
and automated. It out-competes the application of large jackets, since modular
assembly at a shipyard reduces the need for heavy-lifting vessels at the instal-
lation site. Consequently, this reduces the lead-time to first oil.
19

Figure 1.1: The Rosebank FPSO as designed for Chevron; the
turret is highlighted. The Rosebank will serve as a case study
throughout this thesis.
FPSOs commonly owned by contractors (such as the Dutch founded Bluewater
Energy Services (BES) and SBM) and leased by oil companies if need arises.
This a sharp contrast with production platforms which are usually owned by
the oil companies themselves. The reason for this shift is the fact that oil com-
panies rather lease oil fields with a small or uncertain reservoirs than own them,
although a lack of operational experience within a certain region may also be a
factor.
20

Chapter 2
Thesis subject and goals
2.1 Problem description
While applying larger turret diameters (from about 20+ meter diameter), off-
shore engineers have found that the increased relative displacements between
the inner and outer rings of the main bearing causes unevenly distributed loads
and even direct damage on the rollers. This in turn leads to excessive wear and
down-time of the turret system and its weathervaning capability. Bluewater
Energy Services (BES) is interested in a structural solution to this problem.
The main goal in this thesis would therefore be to optimize the main bearing
support structure (as well within the turntable as the turret casing) in such a
way as to limit non-uniform load distributions on the bearing rollers. In the
next paragraphs we shall take a small step back and look at the complete prob-
lem before deciding on a structural approach.
Consider two typical turret designs: a stiff turret with large radius/height ratio
and a less stiff turret with smaller radius/height ratio. The first concept po-
tentially provides a lot of space for equipment within the turret, perhaps even
an inverted swivel stack system thereby drastically reducing the turret height.
It can also cope with more risers. By increasing the diameter we consequently
increase the stiffness of the turret, and this has a drawback, which is discussed
in the next paragraph. The mooring chains exert a force on the spider, the ver-
tical component of which will be transferred by the turret to the main bearing.
In absence of a lower guiding bearing, the horizontal component will have to be
passed up through the entire turret by shear force until it can be transferred to
the ship hull, where it will cause a massive moment. To prevent this, it would
be logical to add a lower bearing to transfer the horizontal load directly to the
hull. However, the increased stiffness of a larger diameter turret would limit
the amount of horizontal forces being transferred simply because the turret in-
21

trinsically does not want to bend, but rather deal with the loads using mostly
shear. Slender turrets that, for obvious reasons, have less bending stiffness do
not display this problem. They deform until they are restricted by the lower
bearing and from thereon transfer a significant proportion of the horizontal load
to the turret casing.
The upper and lower radii of the turret each have their own specific limitations.
We cannot make the upper radius too small taking into account the space needed
for the risers, umbilicals and such. The lower radius is limited by the spider
(the mooring chains system) as well as the risers. As a result of the above, the
upper radius being smaller than the lower radius, the turret has a cone shape.
A cone shaped turret means that, when being lowered into the ships hull during
installation, the radius of the casing in the ship has to be greater than the lower
radius of the turret. When installed, a gap has to be bridged between the main
bearing of the turret and the hull. The structure that closes this gap and adds
stiffness to the outer bearing ring is called the torsion box.
Earlier, within BES, a simplified FEM model was made concerning the SKARV
FPSO project which included a three-raceway roller bearing and a cone shaped
outer ring support structure. The inner and outer ring interaction was based
on contact and gap elements. The model is constraint at the lower part of
de cone which simulates a rigid hull connection. By introducing an axial and
horizontal force to the upper part of the turret we can see how the inner ring
behaves with respect to the outer ring; this without the influence of an inner
support structure. The point of this quick study was to establish the difference
between working with a shell and a solid model. However, we can use it simply
to illustrate the problem with extensive relative bearing deformation. In figure
2.1a and figure 2.1b we see both the creation of a gap and an angular difference
between the two rings. Note that these are visually exaggerated displacements;
the turret and the turret casing seem to actually touch or cross at certain points.
This, of course, does not happen in reality.
In internal correspondence (as far back as 2008) within BES it was noted that
the trend of turret design is towards larger main bearings and more riser space
because of design and installation simplicity; among other things, the risers can
be pulled up straight rather than at an angle. Also, main bearings that span the
entire casing diameter are not a serious financial setback with respect to smaller
bearings, considering the total projected costs are not uncommonly 100 million
plus. As a result the bearings got bigger in diameter over the years. However,
the cross section did not grow in the same fashion because of limitations to
the roller ton size. Because of this growing habit of up-scaling (and because of
22

(a) Bearing displacement (b) Bearing rotation
Figure 2.1: The SKARV main bearing displacement and rota-
tion shown on either side of the turret. Note that the displace-
ment and rotations are exaggerated. In reality the inner and
outer ring never come in contact.
the fact that the turntables inevitably became more massive) the forces on the
bearings could actually deform the rings in such a way that they could slide over
the roller tons axially, which causes damages to the ring. So, on the outer ring
directed we have the loads induced by hogging and sagging of the hull; on the
inner ring we have loads caused by the massive turntable inertia; all of which
are combined with the static axial force caused by the turret weight. As long as
the relative deformation of both rings is the same, there would be no problem
as the roller will be loaded in an acceptable manner. This has hitherto been
the case concerning smaller diameters, but the boundaries are currently being
pushed, explaining the industries interest in solutions, whether they are created
from a structural or mechanical perspective.
Other types of bearings have been considered to some extend. Basically, the
turret main bearing can be based on three different concepts, i.e.
1. Roller bearings (currently applied)
2. Container ring bearings
3. Bogey bearings
BES has shown to favor roller bearing application in SPM systems, including
CALM buoys, mooring towers and turrets. Both container ring and bogey
applications -having significantly larger diameters- suffer from pitting corrosion
and fatigue induced cracks, and this is explains (in part) BES’ penchant for
23

sticking with smaller diameter bearings. The known issues regarding roller
bearings include (and quote for internal correspondence)
1. ‘Maintenance issues; insufficient greasing or the usage of inferior quality
grease causing internal corrosion and ingress of water and debris.’
2. ‘The inaccuracy of supporting surfaces causing peak loads in certain areas
and edge loads on the rollers.’
3. ‘Incorrect design of support structures; deformation of structures leading
to the rotation between and opening of the bearing rings with respect to
each other, also causing non-uniform load distribution.’
Although all of the above potentially pose relevant and significant problems, the
latter will obviously be the one this thesis will address.
2.2 Problem approach
One is of course allowed to question the entire existence of the single point
moored FPSO and come op with an radical new concept. This thesis, however,
will work within the concept of the current FPSOs capable of weathervaning.
Having established this, we may fundamentally approach the problem in the
following ways:
1. Limit the loading on the main bearing; this is already partly done by
applying a lower bearing, though the horizontal forces induced by the
turntable inertia still remain.
2. Acquire more proportional bearing dimensions; this can mean two things:
either you increase the cross section of the bearing along with the radius
or you keep the bearing diameter small.
3. Different bearing design; an inner bearing ring that can impose pulling
forces on the outer ring is already applied (using a fourth raceway), but
there are various other options that could be considered.
4. Design the structures adjacent to the main bearing in such a way it limits
the relative deformations between the inner and outer bearing ring.
Approach 1 holds a fundamental question that we always have to ask ourselves
repeatedly during any design process. The inertia forces from the turntable can
only be reduced by decreasing the mass or radius of gyration. This requires
extensive redesigning of the turntable and would likely cause more problems
than it would solve. Approach 2 and 3 will need to be investigated by an expert
24

on large diameter bearings since it requires far going knowledge about tribol-
ogy 1 and contact mechanics. It is therefore wise to consider the bearing itself
as a black box and work with the dimensions and properties provided by the
manufacturer. Approach 4 lies within the realm of structural mechanics and we
should be able to analyze this particular problem using finite element method
(FEM).
Various attempts were made by other companies to solve this pending problem
via a structural approach. Two of them are discussed here; a few are referred to
in [25, 26, 27]. SBM filed a patent [24] in 1989 which described the use of a ‘rigid
ring’ in order to protect the outer main bearing ring from deformations. This
torsion box is by no means an innovative way of distributing loads but rather a
very stiff circular structure on which the main bearing is mounted; in essence it
is a extension of the bearing itself making the construction stiffer on the whole.
The torsion box rests on top of the extended turret casing and is free on all
sides, it is not embedded in the structure of the hull itself. The observation that
this construction does not strike one as an valid invention does not change the
fact that its patent held for 20 years after which it expired in 2009.
In 1997 a paper [12] (also in affiliation with SBM) was published in the OTC con-
cerning the so-called ‘forgiving tanker/turret interface’ stating problems caused
by relative deformation could be solved by applying a flexible coupling between
turret and casing using an elastomeric suspension. The system included several
elastomeric pads installed at and angle that could be hydraulically aligned in
situ. Still, it leaves one to question the fatigue performance of these types of
support (since the entire loads have to be transferred through a few pads) and
contingencies of this design have been found sporadic during further literature
study.
It might be worth pointing out a perhaps rather salient contradiction: On one
hand engineers have tried to tackle this problem by adding stiffness by intro-
ducing a rigid torsion box, on the other they have done the exact opposite by
installing flexible couplings. Granted, a difference might exist between inner
and outer ring stiffness in order to reach an optimum, but both papers made
opposite adaptions to the outer only. This peculiar fact might tell us something
useful about how the industry responds to problems of relative nature, rather
than the conventional absolute ones.
1The science concerned with interacting surfaces, friction, lubrication and wear.
25

2.3 A step toward topology optimization
2.3.1 Optimization potential
The conclusion of the previous section was that the design of the main bearing
support structure (i.e. the structures directly connected to the main bearing,
the hull and the turret turntable) would be a suitable candidate for further,
more extensive research. This means we will start searching for indications that
changes in topology of this structure could actually improve the stress distribu-
tions within the main bearing. It also means ruling out the possibility that the
solution might be a very straight forward and simple one; a scenario to avoid
at all cost would be one which, after months of research and modeling, yields
a fundamental, text book solution to the problem. This is not to be expected
though, considering the industry still struggles with the problem, but it is nev-
ertheless a desirable approach to any new problem.
Figure 2.2: The model geometry with the main bearing cross
section shown in red, the turntable and hull in gray.2
In figure 2.2 a section of the hull and the turntable are represented by two
discretized areas with appropriate dimensions. Connecting the hull and the
turntable is a simple cross sectional model of the main bearing in which two
links are placed for each of the four raceways (therefore 8 links in total). Each
pair of links is a simplified model for a roller, where the links represent either
edge of the roller. When subjected to an uniform load distribution or vertical
displacement, the stresses in these links will be equal. If these stresses are not
equal, we may conclude a certain degree of relative deformation between the
coupled substructures has occurred. This is only valid if we allow the links
26

to only respond to compression, not tension, since rollers can only exert pres-
sure on a surface. Thus, by evaluating the relative stress between the links
we evaluate the relative deformations between the structures. Since the rollers
are relatively small in comparison to the turntable and hull structure (where
we expect smooth, near zero curvatures), we can assume the stress distribution
between the links to be a linear function. The load distribution will therefore
be optimal when both stresses are equal. Upon performing a FEM analysis
one may derive the relative stress between the two members within a set. The
higher this relative stress, the less uniform the load distribution on a bearing
roller would be in reality (and vice versa).
The stiffness corresponding to a particular degree of freedom in a structure
is always dependent on the modulus of elasticity and the topology. If we as-
sume both are interchangeable, then we are allowed to simulate an arbitrary,
non-defined change in topology by varying the elasticity of both design spaces
independently, i.e. E ⊂ Ω. While going through different combinations of stiff-
ness we can monitor the effect it has on the relative stress between each set of
links. Note that we are trying to monitor the effect of topology in general, not
a specific topology.
The algorithm grades the load distributions within the link sets of each structure
by introducing a dependent performance variable φ , defined by
φ(Eh, Et) =1
n
n∑i=1
(σmax
σmin
)i
φ ∈ [1,∞〉 (2.1)
In figure 2.3a we can see the landscape described by the performance variable φ
as a function of the hull and turntable elasticity ratio (Eh and Et). The ratios
are defined by
Eh,t =E
210 GPaEh,t ∈ [0.5, 2]
As φ approaches unity (or perhaps becomes equal to 1) the better the load
distributions in all link sets become. Optimizing the performance variable for
changing E would therefore mean
min φ(Eh, Et) : Eh,t ∈ Γ (2.2)
with Γ representing the feasible domain. The feasible domain ranges from 0
to 1, since a ratio of 1 represents the full elasticity modulus of commonly used
steel (210 GPa). A ratio equal to 0 means we discarded the design space and
a ratio equal to 2 would mean we are using a very stiff but fictional topology
(since no change in topology can result in a higher stiffness than the fully closed
design space). Figure 2.3 shows that, in both feasible and non-feasible domain,
27

(a) Partly non-feasible domain (b) Feasible domain
Figure 2.3: Performance variable φ as function of turntable and
hull stiffness ratio (Et and Eh respectively) in both feasible and
non-feasible domain.
the optimal solution is not a simple matter of making both hull and turntable
as stiff or flexible as possible, nor is it a unique ratio between stiffness. The
numerical results of this analysis are shown in table 2.3.1. In the chosen design
space and bearing cross section geometry, a φ of 1.1056 is the best attainable
performance, resulting from a sem-stiff turntable (Et = 0.5) and a stiff hull
structure (Eh = 1.0).
min φ Eh Et
Feasible 1.1056 0.50 1.00
Non-feasible 1.1045 0.72 1.22
Based on this simple test we can conclude that there is potential for a structural
optimization approach, since the ratio between the hull and the turntable stiff-
ness is not a straight forward one. We have to realize, though, that this model
is two dimensional, and as such it does not take into account the full geometric
effects of the structure in 3D. It does, however, give us more confidence that a
3D model will support our conclusions based on 2D.
2.3.2 Why topology optimization?
Before the need for excessively large, segment-fabricated main bearings to sup-
port the colossal turrets we find in the new generation FPSOs, non-uniform
load distributions were not the main concern. Smaller diameter bearings have a
28

more proportionate cross section in contrast to their large diameter cousins and
as such they are less susceptible to relative inner and outer ring deformations,
or, more specific, to deformations in general. Also, as the bearing diameter
decreases, we expect the mass of the turret, the turret radius of gyration and
the loads induced by the risers to decrease accordingly (decreasing the diame-
ter obviously means decreasing the feasible amount of risers). Because of these
relations, the importance of load distributions have hitherto not been an active
constraint in the design process. They only emerged as a scaling effect of con-
tinuously pushing the main bearing dimensions to its limits.
While pushing these boundaries, initial designs have been based (in most cases)
on pre-existing but smaller turrets build for similar conditions; turrets that had
proven themselves in practice but were designed without an active constraint
concerning load distributions. These initial designs would be adapted so as to
tackle the problems at hand, resulting in a larger, slightly modified turret. This
manner of designing is very much like an evolutionary process, at the end of
which we now find ourselves approaching the boundaries imposed by excessive
wear and gapping.
Further modification of the turret design might well be possible, at least to a
certain extend. The Rosebank’s main bearing support structure has been suc-
cessfully adapted, although only in numerical models, to reduce the non-uniform
load distributions on the rollers to an acceptable limit. This also included the
introduction of a new type of bearing, one with an additional fourth (outer)
raceway to cope with the rings’ newly developed gapping behavior. The inter-
esting question remains: Can engineers maintain this approach of constantly
modifying designs for ever growing diameters and still regard the result as an
structural optimum? Since a suitable initial design is a prerequisite to finding
an optimum within a design domain, it is not realistic to positively answer that
question because the earlier structures were not designed to deal with future
problems concerning relative deformations of the main bearing. The structure
has demand added to it, demand that was not previously there.
We might even go further and ask ourselves: Do engineers (as they are ul-
timately human) have a reliable intuition when it comes to finding optimal
structures that have to satisfy one or multiple relative constraints? Also this is
not obvious. Engineers in general have developed an intuition that helps them
design and recognize stiff structures (structures that tend to resist deforma-
tion when subjected to a certain load) as well as avoiding stress concentrations.
When it comes to relative deformation, that intuition looses its grasp because a
structure no longer has to be either stiff or compliant. As we saw earlier, when
29

dealing with coupled structures, such as the main bearing and its support struc-
ture, matters get only more complex, especially when we increase the number of
such constraints. In many FPSOs the outer main bearing ring is reinforced with
an circular boxed construction, also referred to as the torsion box or ‘rigid ring’
(the term used in the SBM patent [24]). This construction was added to make
the outer ring more stiff in attempt to solve these relative constraint problems.
The point being, there is no easy, straight forward method to determine the
desired compliance or stiffness for each individual structure when dealing with
these type of constraints.
There is a overlapping field within mathematics and engineering which attempts
to approximate an optimum structure, given a design domain and a certain set
of boundary conditions, loads and constraints, called ‘structural optimization’.
We can divide structural optimization into three global categories:
1. Size optimization
2. Shape optimization
3. Topology optimization
wherein topology optimization (TOP) would be considered the most fundamen-
tal approach. An example of size optimization could be to optimize the cross
sectional area of a cantilever bar subjected to a horizontal load and horizontal
displacement constraint. Naturally, this concept can also be applied to multi-
variable problems, but the geometry of the model is predetermined. Shape op-
timization deals with solely the contour of structural boundaries. Basically, it
can manipulate the shape of a boundaries, but cannot create new boundaries or
change the connectivity within the structural domain. Topology optimization,
in general, is able to change boundaries and connectivity when given an appro-
priate design domain. Consider a model which is basically a boxed construction
with diagonal members in which the design variables are the cross sectional
areas. Let’s assume we want to minimize cross sectional area (i.e. minimize
mass or volume) but maintain a certain stiffness. Obviously, the optimization
should only decrease the area of those members that, in their given position
and orientation, do not contribute significantly to the structure’s performance
or could be sacrificed in order to add area to other, better positioned members.
TOP would be able to reduce the cross sectional area of a member thus far such
that the member is essentially removed from the structure.
30

(a) (b)
Figure 2.4: From a initial starting point (a), with the cross sec-
tion of the members as design variables, TOP is able to eliminate
those whose contribution is not significant (b).
By removing a member altogether we effectively change the boundaries of the
structure, but it could also create new or merge existing boundaries and change
the connectivity of the structure as a whole. For more examples on how TOP
can shape and sculpt structures, take a quick look at chapter 4 in which various
simple test models are examined.
By increasing the number of design variables, we increase the complexity and
possible detail within a structure. Doing so enables TOP to help us find a
structural optimum within a feasible, bounded domain. Given a space in which
to shape a structure, one will find that it has a (practically) infinite number of
possible structures to choose from. Most of these structures will preform horri-
bly or worse, nevertheless, if they are part of the domain, they are considered
a possibility. Imagine a design space composed of blocks that can be switched
‘on’ and ‘off’, i.e. either they are added to the structure or removed. If we are
looking for an optimal structure within a domain with n of such blocks, we are
looking at 2n possibilities. When we consider design spaces with 2000 blocks or
more, the number of possibilities is more than the staggering amount of atoms
in the observable universe. In this thesis a design space with over 12.000 design
variables is considered. How one navigates through this maze of possibilities is
explained in detail in chapter 3.
2.4 Goals and boundaries
To conclude this chapter, a list of goals and subgoals is formulated. Whether
or not these goals are achieved, and to what extend, will be evaluated in the
conclusion (chapter 7). The list differs somewhat from the goals in the thesis
proposal, which is due to the fact that during the actual modeling, unexpected
31

problems were encountered. The goals are as follow:
1. Investigate the potential of topology optimization for the pending main
bearing issues (has already been discussed, see subsection 2.3.1).
2. Write a general mathematical framework for optimization with relative
stress constraints.
3. Write an optimization program capable of handling
(a) multiple (relative) constraints.
(b) the intrinsic non-linear behavior of roller bearings.
(c) axisymmetric as well as non-axisymmetric loadcases.
(d) data exchange between optimization and external FEM-algorithms.
4. Compute an optimum solution which can be used as an initial design and
provides structural insights concerning relative constraints.
Since this thesis is mainly concerned with the potential for applying topology
optimization to problems of axisymmetric and relative nature, boundaries are
set on the various failure modes. Mostly likely, the resulting structure will fail
on one or multiple of these criteria, but, as discussed earlier in this chapter,
it should provide insights in what a theoretical optimum structure should look
like, from which point on practical engineering can take over. In the future, this
model may be expanded with a whole range of failure modes. All boundaries
set in this thesis are now listed:
1. The loadcases are assumed to be static. No dynamic effects are examined.
2. The main bearing is considered a black box (it will not be part of the
design domain Ω).
3. Effects of gravity on the structure are neglected.
4. No fatigue, buckling or yield critera are considered.
5. All material is assumed to behave elastic.
6. The structure will be axisymmetric.
7. The stress distribution on the rollers can be approximated in a linear
fashion (as long as contact is maintained).
32

2.5 Thesis structure
Some effort will now be made to describe the structure of this thesis; how it will
attempt to achieve these goals. The best way to structure this thesis turns out
the be rather chronologically.
Chapter 3 will discuss the basics of optimization and, in particular, the
methods used in this thesis. The mathematical description of the prob-
lem is formulated such that we can always return should we find ourselves
lost in detail. Of great importance throughout the other chapters are the
concepts of finding topological derivatives and their manipulation by us-
ing penalization (SIMP). The method of moving asymptotes, duality and
Newton’s method for finding multi-constraint optima, although important,
will be less prominent in later chapters.
Chapter 4 is there to confirm the actual theory by conducting a series
of simplified model tests. Not all performed tests are included in this
chapter; the ones that are were highlighted mainly because they reassured
the algorithm’s performance under special conditions, such as:
1. Link elements that change their angle during optimization.
2. The coupling of two separate design spaces and their susceptibility
to ill-conditioning.
3. The introduction of relative constraints, rather than conventional
absolute ones.
Also, the ways in which performance can be monitored and evaluated are
introduced. This, of course, might help in the interpretation of the data
produced in chapter 6.
Chapter 5 could be considered the actual in-depth modeling of the main
bearing support structure problem. It represents the application of the
math proposed in 3 (verified by chapter 4) to a set of Matlab and Ansys
programs controlled by a master of ‘governor’ program, all of which can
be found in the appendices ?? and ??. These programs together perform
the model building, finite element analyses, necessary data exchange and
optimization in an iterative fashion for both axisymmetric and bilateral
loadcases. Concerning the latter, some new mathematical concepts are
introduced which would be out of place in chapter 3, concepts that are
needed to determine topological derivatives for superimposed harmonic
functions (these type of functions cause tangial deformations which greatly
complicate matters).
33

Chapters 6 and 7 will introduce different sets of loadcases, their behavior,
results and the conclusions that can be drawn from them. The goals, as
described in 2.4, will be evaluated.
34

Chapter 3
Mathematical modeling
The focus of this chapter is to establish a mathematical framework on which we
can then proceed building the final bearing and support structure model (which
will be done in chapter 5: ‘Applications to main bearing support structure’).
It might occur that the connection between theory and application within the
FPSO is not explicitly mentioned in this chapter, e.g.: it does mathematically
formulate the relative constraint functions, but the actual modeling of the main
bearing rollers, in which these constraints are used, will be left to chapter 5.
Naturally, chapter 5 has references to the mathematics where needed.
Within this framework we will discuss all mathematical concern within the
topology optimization, among others, the
the formal definition of the main optimization problem denoted P
the definition of the objective and constraint functions
methods for approximating and subsequently solving P
The order in which we shall discuss these topics is based on the order in which
the algorithm deals with the optimization (which is rather similar). This could
well proof to be more convenient when evaluating the actual programming in
Matlab.
3.1 Formulation of main problem
Let us first define our main optimization problem and refer to it as P (shown in
(3.1)). In contrast with conventional topology optimization, we are not directly
concerned with either the stiffness or compliance of the structure. Of course
there are practical limitations to how flexible a structure can actually become,
but the real restrictions are the stress distributions on the roller bearings. If
35

we would set out to optimize these stress distributions we will find ourselves
facing a multi-objective optimization, considering the amount of roller bearings.
Intuitively, one would like to stay away from such mathematical formulations as
they could pose a problem far too complex for practical applications. Regarding
the stress distributions as constraints functions with corresponding constraint
limitation values (or tolerances) avoids this problem altogether. A logical choice
for the objective function would be the reduction of mass. In general, the
optimization problem could then be written as
P :
min f0 (x)
fi (x) 6 τi i = 1, . . . ,m
x(k)j ∈ χj j = 1, . . . , n ∧ ∀k
x(κ)j =
χj
χ−j
(3.1)
wherein f0 is the objective function, fi is one particular constraint function with
corresponding tolerance τi and x is the set of design variables or element densi-
ties. κ is the amount of iterations needed to reach convergence. The fourth and
last demand within P is a solid/void demand, i.e. the resulting structure should
mainly consist of either solid or void design variables. The tendency towards
these types of structures has to be mathematically built into the algorithm.
This is done using the so called SIMP method which is explained in detail in
subsection 3.3.2.
3.1.1 Objective function
The objective function in this thesis has two separate definitions: a plane stress
one and an axisymmetrical one. The plane stress definition is a rather simple,
linear function of x defined as
f0 (x) =
n∑j=1
xj (3.2)
Since densities are proportionate to the total mass of the structure, minimizing
(3.2) as demanded by P is equal to minimizing the mass of the structure. This
particular definition is only used in chapter 4 where the main purpose it to test
the eventual algorithms characteristics and performance. For axisymmetrical
models, such as the main bearing support structure model described in chapter
5 and onward, f0(xj) becomes a function of the distance that element j is located
from the symmetry axis. Consider the volume enclosed by a ring-shaped object
(as depicted in figure 3.1)
36

Figure 3.1: A design variable xj within an axisymmetric model
represents a solid ring of material (here cut in half) with area
A and inner and outer radii ri and ro.
V = 2
π∫0
ro∫ri
Ar dr dθ
in which ri and ro are its inner and outer radii respectively. A is the area of an
element, and, since the design spaces will be uniformly meshed, A will simply
be a constant. Its normalized mass can then be described by
m
πA= xj
(r2o − r2
i
)j
= xjRj (3.3)
From here its only a small step defining the axisymmetric objective function
f0 (x) =
n∑j=1
xjRj = xTR (3.4)
3.1.2 Relative stress constraints
The need arises for a mathematical notation in order to compare stresses within
each roller. Choosing a stress-ratio approach could cause problems in case of
severe uneven load distributions, causing the algorithm to deal with constraint
values approaching infinity or zero. In these circumstances, this approach would
fail to supply the optimization with useful constraint information and cause com-
putational errors. In reality these situations should not occur, provided that no
turret was designed that poorly, but when running models test we want the al-
gorithm to be able to deal with these types of hypothetical situations. We could
imagine a scenario in which one roller would be found rudimentary, then the op-
timization should be able to eject this roller by removing all element connecting
it without encountering instabilities; instabilities resulting from perturbations
within an almost unloaded roller that might well cause huge constraint value
37

responses. Therefore, defining a constraint function using the difference ∆σ
between two stress values would be a more suitable approach. The formulation
would then become
f∆σ (x) = |∆σ| − τ 6 0 (3.5)
But dealing with absolute values while calculating topological derivatives is
not preferable. The derivatives loose their indication whether they increase or
decrease the constraint value per change in density of an element. In order to
still use these constraint formulations, we have to assign two separate functions
for each constraint; one that deals with positive difference and one that deals
with negative difference, i.e.
f∆σ =
f∆σ = ∆σ − τ 6 0
f∗∆σ = −∆σ − τ 6 0(3.6)
in which
∆σ = σ1 − σ2
Both σ-terms represent the stress in a roller bearing. Rollers can only transfer
loads when being compressed, and therefore both σ1 6 0 and σ2 6 0. To ensure
this condition is met at each iteration, pre-tensioning of the main bearing is
modeled at a later stage (see subsection 5.1.3). Looking at (3.6), one can easily
verify that f∗∆σ is a horizontally mirrored image of f∆σ, the symmetry axis of
which is the line −τ . This is shown in figure 3.2. Consequently, only one of
these constraint can be active at a time, or both are dormant. Applying this
to each constraint function effectively means doubling the amount of relative
constraints. Since the eventual algorithm is well suited to deal with a large
number of constraints, this should not pose any computation problems.
3.1.3 Load preservation constraints
Running an optimization solely on relative stress constraints will yield only
trivial solutions wherein both f0 and fi approach 0. This is due to the fact
that the algorithm thinks discarding the loaded elements within the structure
as a valid solution (and it is right to do so since the problem is not properly
bounded). This leads to instabilities within the FEM analysis. To avoid these
trivial solutions the algorithm uses ‘load preservation’ constraints, which are
displacement constraints that apply at the loaded nodes. These constraints are
defined by
fi = ui − τi 6 0 (3.7)
38

Figure 3.2: A hypothetical development of a constraint function
and its mirror about the line g = −τ . Which one is which does
not matter.
It is inevitable that these constraints demand structural stiffness of some degree,
but, in reality, there are of course limitations on how compliant the turntable
and casing may become; e.g. a support structure made of Jell-O would not
be helpful. Even though they are chosen in a heuristic manner, displacement
constraint can be of use in finding an optimum by setting these restrictions.
3.2 Optimization
To solve for P (3.1), one of the core elements in optimization in this thesis is
the Method of Moving Asymptotes (or MMA) as first proposed by K. Svanberg
[20]. In his paper he devised a new method for dealing with a large number
of design variables and constraints as typically found in structural optimiza-
tion. Furthermore, it was thought out in such a way as to keep the method
flexible, handling various types of constraints and elements as well as element
sizes, shape variables and material orientation. MMA belongs to the class of
approximation methods, in which we also find, among others, the well known
Sequential Linear Programming (SPL) and Sequential Approximate Optimiza-
tion (SAO). As the exact functions for structural response to a change in design
variable xj are non-linear and usually too complicated to be obtained analyti-
cally, the general approach had always been to create approximation functions
on which an iterative-type optimization can be based. Commonly, this entailed
the application of the a first order Taylor-expansion, as in SPL. MMA is an
alternative method which produces asymptotic, convex approximate functions.
Here convexity indicates the property of a given set S such that each linear con-
nection between two arbitrary data points x1 and x2 represents a subset within
39

Figure 3.3: A convex (left) and non-convex (right) example of
set S
the original S, i.e. x ⊆ S. Schematic representation of a convex and non-convex
set S are shown in 3.3. With the approximate description of P (later denoted S)
a new domain can be defined (using Lagrangian duality) in which a minimum
has to be found which satisfies the KKT-conditions (also discussed later).
3.2.1 MMA approximation
First, let us go into detail concerning the convex asymptotic approximations.
Since the optimization is an iterative (evolutionary) process, we will have k
denote the current iteration number, such that k ∈ N. The approximation
function (which shall be symbolically distinguished from the exact function as
f) is then defined as
f(k)i (x) = r
(k)i +
n∑j=1
(p
(k)ij
U(k)j − xj
+q
(k)ij
xj − L(k)j
)(3.8)
This means that for every objective or constraint function f we create a domain
in Rn. Each independent design variable within the set x has its own unique
asymptote, the characteristics of which are defined by
p(k)ij =
(U
(k)j − x(k)
j
)2
∂f/∂xj if ∂f/∂xj > 0
0 if ∂f/∂xj 6 0
q(k)ij =
0 if ∂f/∂xj > 0
−(x
(k)j − L
(k)j
)2
∂f/∂xj if ∂f/∂xj < 0
in which U and L represent the upper and lower asymptote boundary respec-
tively. The partial derivatives are evaluated at x(k) and therefore simply repre-
sent a either positive or negative scalar value. The sign of the partial derivative
determines which of the two asymptotes is activated, the lower or upper. The
term ri is a variable, independent of any partial derivative, which controls the
40

vertical shift in the approximation in order to line it up with the exact function.
Therefore
r(k)i = fi
(x(k)
)−
n∑j=1
(p
(k)ij
U(k)j − x(k)
j
+q
(k)ij
x(k)j − L
(k)j
)
One can now easily verify that
f(k)i
(x(k)
)= fi
(x(k)
)∂
∂xjf
(k)i
(x(k)
)=
∂
∂xjfi(x(k)
)∀k ∈ N
which means that the original and approximation function, as well as their
derivatives, are equal when evaluated at the iteration point x(k). A good ob-
servation would be that the only remaining control regarding the shape of fi
is the positioning of the asymptotes using U and L. Svanberg [20] proposes
a somewhat heuristic approach to determine the boundaries, but, in any case,
it is clear that the iteration point should lay in between the boundaries, i.e.
L(k)j < x
(k)j < U
(k)j . By expanding or contracting the boundaries of each design
variable separately, MMA has dynamic control of the optimization; it is able to
slow down or speed up the alteration of each xj . When ∆xj/∆k is consistently
positive or negative its asymptotes are expanded, allowing the variable to in-
crease or decrease more rapidly. When elements have a clear purpose (or lack
of purpose) this is an advantage, since it will take less iterations to converge.
When elements are in a structural zone where their contribution is less obvious,
∆xj/∆k might alternate; an element may sway back and forth in density. Its
boundaries are then contracted in order to limit its behavior. At a later stage
in optimization the element’s purpose may become clear and as it does, the
increase or decrease in density will become consistent and the boundaries are
readily expanded. The exact conditions can be read in [20] and the particular
adaptions made in this thesis are discussed in 5.2.6.
With these approximated functions we can define an optimization subproblem
S based on P discussed earlier, i.e.
S(k) :
min f
(k)0 (x)
f(k)i (x)− τi 6 0 i = 1, . . . ,m
x(k)j ∈ χj j = 1, . . . , n
(3.9)
Solving S(k) with the approximation functions obtained using x(k) yields a new
set of design variable values which shall be used as the next iteration point
x(k+1). Thus, we sequentially solve a series of approximated subproblems, each
of which will hopefully bring us closer to the solution to main problem P defined
41

in (3.1) until some convergence criteria is met. Note that within S, the solid/void
demand has disappeared. This is due to the fact that intermediate solutions may
vary in density to whatever extend the algorithm pleases.
3.2.2 Lagrangian duality
S is solvable using the Lagrangian duality principle. From hereon, f simply de-
notes the approximated function (earlier denoted by f). We make a distinction
between the ‘primal’ variables and ‘dual’ variables, which consist of the de-
sign variables x and the so called ‘Lagrangian multipliers’ λ respectively. Both
primal and dual variables are used to incorporate the constraint function into
the objective function (a nested function if you will) to form the Lagrangian
L : Rn × Rm → R
L (x,λ) = f0 (x) +
m∑i=1
λifi (x) = f0 (x) + λT f(x) (3.10)
The dual variables λ will prove a useful tool for solving these types of opti-
mization problems. Because L is the sum of the objective function and weighed
summation of constraint functions, for any particular set λ, L is a hyper surface
with n dimensions. Since all functions within L are convex, this hyper surface
has to be convex as well when we demand λi ≥ 0,∀i. 1 Thus, for any par-
ticular λ, the minimum W = minx
L will have a certain value. As ‖λ‖ → ∞,
W = minx
L→ −∞, and, more importantly
lim‖λ‖→0
W (λ) = minx
(lim‖λ‖→0
L (x,λ)
)= min
xf0 (x) : fi 6 τi (3.11)
which means that as the norm of λ approaches 0, the minimum of the La-
grangian converges to a feasible optimum within the objective function. This
characteristic is formally defined by the ‘Lagrange dual function’ (or simply
‘dual function’) defined as
g (λ) = infx⊂χ
L (x,λ) = infx⊂χ
(f0 (x) +
m∑i=1
λifi (x)
)(3.12)
where g is the infimum, or ‘greatest lower bound’, of the Lagrangian L. There-
fore, if we find the solution to g, we find the solution to the original problem
S. The KKT-conditions set the requirements that a solutions needs to satisfy
1Subproblem S satisfies Slater’s condition for ‘strong’ duality. Slater’s condition is a reg-
ulatory condition (or constraint qualification) for strong duality within the KKT-conditions.
Only when the problem can be characterized as having strong duality, the difference between
the primal and the dual solution, better known as the ‘duality gap’, is equal to 0. It will not
be further discussed in this thesis.
42

in order for it to be an minimum. For inequality constraints (such as we have
defined in P) one needs to satisfy the following criteria
∂f0
∂x∂s + λT
∂f
∂x∂s = 0 , f = 0 (3.13)
in which ∂s represents a vector in any feasible direction.
(a) Objective (solid) and constraint func-
tion (dashed).
(b) Lagrangian L as function of λ (dot-
ted) and set of corresponding optima (thick
solid) denoted W (λ)
Figure 3.4: Visualization of using the Lagrangian duality prin-
ciple considering a simple 2 dimensional optimization problem
with 1 objective and 1 constraint function.
A simple duality optimization example is shown in figure 3.4 using one objective
and one constraint function within a 2 dimensional domain. Figure 3.4b shows
how the set of optima corresponding to a sequential set λ converges to the
minimum of the original objective function while remaining within the feasible
domain. In this particular example the optimum lies in between the upper and
lower bound defined by the constraint function, i.e. the constraint is not active.
Figure 3.5 shows the obvious effect of adapting the constraint function in such
a way it does becomes active. The optimum now converges to the boundary
imposed by the constraint function. Incorporating the MMA approximation
defined in (3.8) yields
L (x,λ) = r0 − λTb +
n∑j=1
(p0,j + λTpjUj − xj
+q0,j + λTqjxj − Lj
)(3.14)
in which r0 − λTb is the dual variable counterpart of ri. The set of optima as
a function of the dual variables λ is defined as W , such that for a particular
design variable xj we obtain
Wj (λ) = minxj
Lj (xj ,λ) (3.15)
43

Figure 3.5: Visualization of the same problem as in figure 3.4,
only with an active constraint. The infimum coincides with the
objective function evaluated at the lower bound of the feasible
domain, as is the case when considering strong duality.
As we determined earlier, the dual objective function Wj (λ) is a concave func-
tion, and as such finding the global optimum means finding the unique solution
to the equation
dLjdxj
= 0
Doing so allows us to define λ as a function of xj , hence Wj becomes an implicit
function of xj instead of the explicit formulation in (3.15). To finally find a
solution to the dual function g (3.12) (and consequently the problem S) we have
to solve for subproblem W, defined for iteration k as
W(k) : maxW (λ) (3.16)
This is relatively easy function that can be solved using an arbitrary search
algorithm, such as a conjugate gradient method, to find a solution that abides
the KKT-conditions (3.13). The algorithm in this thesis uses the primal-dual
Newton method, which is basically the well-known first order Newton method
adapted for primal-dual problems. This method is not discussed in this thesis,
the reader is referred to [16].
3.3 Topological derivatives
Since the method of moving asymptotes is a first order approximation tech-
nique, we will need to provide subproblem S with first derivative information. In
44

optimization problems such as these they represent the effect a change in topol-
ogy has on the objective and constraint functions, hence the name ‘topological
derivatives’ , also frequently referred to as elemental ‘sensitivities’. Whether
or not these derivatives are easily obtained depends on the complexity of the
elements and the constraints involved. Not in the sense of expanding the set of
degrees freedom within each element (this only increases computation time) but
in the sense of using more extraordinary, exotic elements like contact elements,
more on which later. In reality, the structure’s response is described by a rather
large set of differential equations which one would not want to derive analyti-
cally. Fortunately, only the first derivatives of various responses to structural
change need to be obtained.
3.3.1 Objective derivative
The plane stress objective function was defined by (3.2), a relatively easy func-
tion. Determining the derivative is also rather easy, i.e.
∂f0
∂xj= 1 ∀j (3.17)
The axisymmetrical variant, defined by (3.4), becomes
∂f0
∂xj= Rj ∀j (3.18)
Rj was defined earlier in (3.3). Note that ∂xj means a infinitesimal increase in
density, therefore the objective function would increase as well. Of course, we
set out to achieve the opposite: decreasing densities and decreasing objective
values. This might be a little counter-intuitive and the reader will be reminded
a few times throughout this thesis.
3.3.2 Suppressing intermediate densities using SIMP
Up to this point there is no mathematical tendency built into the algorithm for
creating a homogeneous structure. As far as the optimization is concerned, an
optimum solution x(κ) might well consist of various intermediate values. This, of
course, is completely impracticable from the engineers’ perspective. We might
in some circumstances allow structures involving different material types or
laminates, but these are considered outside the scope of this thesis. Gradually
decreasing and increasing densities throughout the structure are simply not
feasible. Therefore, the demand imposed on the optimization is
x(κ)j = χ
−j
∨ x(κ)j = χj (3.19)
45

wherein κ is the amount of iterations needed to satisfy the convergence criteria.
This was already included in P (3.1). The demand in (3.19) can be achieved by
imposing so called ‘Solid Isentropic Material with Penalization’ method (SIMP)
on the moduli of elasticity corresponding to each independent design variable,
such that
Ej = Egxpj p ∈ [1,∞) (3.20)
wherein Eg is the initial modulus for all design variables and p is a penalization
factor which can be freely chosen to control the severeness of the penalty ele-
ments receive for not being completely solid (usually p = 3 produces satisfactory
results). Thus, by using SIMP, the density does not influence the stiffness of an
element j in a direct manner, but by affecting the material property Ej . Before
each iteration the elasticity vector E has to be updated within the FEM model,
which shall be further discussed in subsection 5.2.7. If the stiffness matrix of
an arbitrary element j is given by kj = Ejdj , then SIMP has the following
influence on the global stiffness matrix:
K = Eg∑
xpjdj (3.21)
This relation is needed in subsection 3.3.3.
3.3.3 Constraint derivatives
S (3.9) deals with both stress-based and displacement-based (load preservation)
constraints as defined earlier in (3.6) and (3.7). Since stress ultimately de-
pendents on displacement, obtaining the topological displacement derivatives
should enables us to calculate both. How this is done exactly is described in
detail in chapter 5; for now, the focus is solely on the displacement derivative.
We will mainly be concerned with the so-called ‘adjoint method’ [9]. Our main
objective is to calculate the derivative for a particular degree of freedom, re-
ferred to as uρ. Eventually, ρ will be a set of DOFs, but for simplicity let’s
assume it consists of just one DOF. This DOF can also be written as
uρ = fTρ u (3.22)
in which u is the displacement vector and fρ is a dimensionless unit vector with
the ρ-th component unity and all other component equal to 0. At each iteration
we demand a static, determined solution, defined by
K− fu = 0 (3.23)
46

Combining both equation (3.22) and (3.23) we define the adjoint equation as
uρ = fTρ u + λ (K− fu) (3.24)
in which λ is a vector. The partial derivative with respect to xj of the adjoint
equation becomes
∂uρ∂xj
=∂ fTρ∂xj
u + fTρ∂u
∂xj+∂λ
∂xj(f −Ku) + λ
∂f
∂xj+ λ
(∂K
∂xju + K
∂u
∂xj
)When we assume fρ, f and λ are independent of x, then after eliminating some
terms we are left with
∂uρ∂xj
=(fTρ − λK
) ∂u
∂xj+ λ
∂K
∂xju
In this we recognize another equilibrium condition if we define λ =^uT
ρ , which
represents the displacement caused by a unit load. By defining λ in this way,
the derivative is reduced to
∂uρ∂xj
=^uT
ρ
∂K
∂xju
Using (3.21) the displacement derivative can now be formulated as
∂uρ∂xj
= pxp−1j
^uT
ρ kju (3.25)
It is important to note that the notation^u is deliberately chosen to make a
clear distinction regarding the conventional displacement u. This can be best
explained performing the following dimension analysis
^uT
ρ
[m
N
]= K−1
[m
N
]· fTρ [−]
∂uρ∂xj
[m
−
]= pxp−1
j [−] · ^uT
ρ
[m
N
]· kj
[N
m
]· u [m]
^uρ therefore represents a virtual displacement in DOF ρ per unit load in the
DOF of the element being evaluated. Throughout this thesis a clear distinction
is made between virtual and physical displacements, wherein virtual are merely
displacements that allow us to calculate topological derivatives and physical
displacement are the actual displacements found given a certain loadcase.
47

3.3.4 Analysis of penalization
It is perhaps valuable to evaluate the effect of penalization on the derivatives
and see if they behave as expected. The range evaluated is p ∈ [1,∞), wherein
p = 1 would mean the solid/void constraint is discarded from P and solutions
with intermediate densities are condoned. Assume the displacement uρ has a
certain value for xj = 1 and xj → 0 and some undefined intermediate values in
between. Take the extreme case where p → ∞, then for any particular xj the
derivatives would yield
limp→∞
∂uρ∂xj
∣∣∣∣x=1
= p · ^uT
ρ kju =∞ ∀j
This makes sense; any decrease in density would be infinitely penalized the
next iteration, resulting in elimination of element j. Its gradient then becomes
infinite, as the actual change in density ∆x approaches ∂x will result in the
expected ∆uρ between the solid and void state. A variable xj → 1 applied in
the same situation yields
limp→∞
(limxj→1
∂uρ∂xj
)=
^uT
ρ kju · limp→∞
(limxj→1
pxp−1j
)= 0
This is also logical since all density values within that range will be reduced to
0, meaning the element effectively no longer ‘exists’. The structure does not
respond to elements that do not exist, hence the derivative return is equal to
0; it does not matter what changes you make to that element, due to infinite
penalization its effect on structural response is infinitely small.
Besides forcing a homogeneous structure, a high factor p makes the algorithm
less conservative and speeds up the optimization, but it could also easily cause
instabilities. A penalization factor equal to 3 already creates enough tendency
to converge to a solid/void solution, so that sense we do not have to be con-
cerned extending the upper limit such that χj = 1. Theoretically, the lower
limit should be χ−j
= ε in which ε is a small number in order to prevent compu-
tational problems caused by 0. In practice, however, also any arbitrarily small ε
will cause numerical problems better known as ‘ill-conditioning’. More on this
problem in subsection 5.2.3. If we define the stiffness reduction Pj such that
Pj(p, x) = pxp−1j for any particular j, we can visualize the effect of p for x ∈ χ,
which is done in figure 3.6.
3.3.5 Derivatives for arbitrary orientation (DAO)
Ideally, we want to give the algorithm as much freedom as is practically possible
to steer the topology towards more stiffness or more compliance. Imagine the
48

Figure 3.6: The effect of penalization factor p on the stiffness re-
duction factor P (p, x) for an arbitrary element. The blue surface
represents P (p, x) = 1, and so the intersection of both surfaces
is the curve x (p) =1
p−1√p
which the density where penalization
has no influence.
optimum would demand a rather compliant structure. Increasing compliance
could cause the rollers to rotate in space, i.e. their local coordinate systems
are no longer parallel to the global coordinate system. We do not expect large
rotations, but considering the enormous loads in play a slight rotation can al-
ready have a significant effect on the distributions. We can easily transform the
displacement of the bearing nodes in the global system to their respective local
systems, but including this transformation within the displacement derivatives
needs some elaboration.
First, a quick recap on how to transform global displacements to the local dis-
placements of a link element. In the local coordinate system a link element has
only 2 DOFs, that of each node in the direction tan (∆u/∆v) (which is the ori-
entation of the local coordinate system). The values of these local displacements
can be obtained via transformation of the global displacements, i.e.
(u1′
u2′
)=
(sin (β) cos (β) 0 0
0 0 sin (β) cos (β)
)u1
v1
u2
v2
(3.26)
or
u′ = Tu (3.27)
49

Figure 3.7: A schematic representations of definitions and con-
ventions concerning the arbitrary orientation of a link element
(shown in red). The nodes are denoted 1 and 2.
This is an easy geometrical relation, visualized in figure 3.7. The stress in link
element i would therefore become
σi = Eε = EBui′ = EBTui
Since both T and u are a function of xj its derivative becomes
∂σ
∂xj= EB
∂ (Tu)
∂xj(3.28)
When we abbreviate c = cos(β) and s = sin(β) then the local displacement
derivative can be written as
∂ (Tu)
∂xj=
∂u1s
∂xj+∂v1c
∂xj∂u2s
∂xj+∂v2c
∂xj
(3.29)
Regarding the calculations, there is only a distinction between the horizontal
and vertical displacement derivatives since they are multiplied with a factor s
and c respectively. Only the calculations for the vertical displacement derivative
are shown, the horizontal counterpart is omitted. Using the product rule we can
further expand each individual term. The vertical terms become
∂vc
∂xj= c
∂v
∂xj+ v
∂c
∂xj
50

The term ∂v/∂xj we already obtained in (3.25). The second term can be ex-
panded even further
∂c
∂xj=dc
dh· ∂h∂xj
with h = ∆u/∆v and c = cos(arctan(h)). This term will account for the change
of angle due to a unit load. But, since this effect is small and is multiplied with
the displacement, which is an even smaller number, this term is insignificant
compared to the regular displacement derivative (i.e. c · ∂v/∂xj v · ∂c/∂xj).It is therefore neglected.
51

Chapter 4
Test model verification
To ensure the proper functioning of the algorithm, various test models were
programmed to monitor different effects. This chapter shall evaluate a few of
them. They start simple and gain more complexity as we add more constraints
en geometrical challenges, in preparation of the eventual FPSO main bearing
model. The details of each model are not discussed, merely the stability and
convergence are what actually matters at this point. The actual application of
the mathematical model is shown in detail in chapter 5. The following conditions
are modeled and tested for response and stability:
1. Derivatives for arbitrary orientation (DAO) of link elements, as discussed
in subsection 3.3.5.
2. Relative constraints, as formulated in subsection 3.1.2.
3. Coupled design spaces, as the eventual main bearing model will have to
deal with separate design spaces connected only by the main bearing.
The topology plots are shown in a gray-scale fashion, wherein black means full
density and white insignificant density. These two states should be the only
ones present at k = κ, as required in P (3.1) (or at least as close as possible).
In between k = 1 and k = κ we find the intermediate iterations which can
-and always will- contain design variables in a fuzzy (grey) state, making the
structure non-homogeneous. Regions which hold a substantial amount of these
fuzzy elements can be thought of as regions where the optimizer is still looking
for possible solutions. Fully white regions, where elements obviously contribute
little to none to a certain constraint, will most probably remain white unless
some form of perturbation is present within the system.
52

4.1 Arbitrary orientation with stress and dis-
placement constraint
The purpose of this test is to verify the optimizer obtains valid topological stress
derivative for a link which is allowed to rotate (mildly) during optimization.
Derivative information is based on subsection 3.3.5 (Derivatives for arbitrary
orientation). The objective is to reduce mass while not exceeding a certain stress
threshold in the link connecting the center and the top left node. Furthermore, a
horizontal displacement constraint is added at the top left corner. The structure
is subjected to a conservative horizontal force as shown in figure 4.1. Note that
the model represents a plane stress situation, not a axisymmetrical one.
Figure 4.1: Test for validating the optimization using derivatives
for arbitrary orientation. In this model a horizontal displace-
ment constrain is added at the top left corner. The diagonal
link is subjected to a stress constraint.
The results of this test are shown in figure 4.2 and 4.3. Since the link is consid-
ered weightless, the optimizer should use it to its full extend in order to further
the reduce mass of the surrounding structure. Indeed it does just that, as shown
in figure 4.2. However, it needs to maintain a link support structure to ensure
it does not exceed its stress limit. There are some checkerboarding patterns
involved -thereby introducing some artificial stiffness- but not to a worrying
degree. Checkerboarding itself is explained in section 8.6.
If we remove the stress constraint from the link, the optimizer simply iterates
towards a minimal triangular structure in which the link forms a connection
between the top left corner and a structure spanning the distance between the
bottom right corner and center, as would be expected.
4.2 Displacement and relative stress constraints
In order to evaluate the ability of the algorithm to deal with relative stress con-
straints (as formulated in (3.6)), the block model from the previous section is
53

Figure 4.2: Optimization of an arbitrary orientated link element
within a structure.
used once more. The design space is now subjected to a compressing vertical
force and held in place by two sets of links, 1 set on the left and 1 on the right
(shown in figure 4.4) The difference between the stress in a set may not exceed
a threshold value τ and an addition vertical displacement constraint is added at
the force location. Since the block is not uniformly loaded, the force will have
to be distributed on both side via shear stress. This means the 2 inner links
will start off with a higher initial stress than their neighbors, but τ is chosen
in such a way that x(1) ⊂ Γ. In essence the algorithm is forced toward a more
complex geometry than would be needed in order to satisfy the displacement
constraint alone, in which case is could simply form a pyramid structure using
the 2 inner links. The relative stress constraint prevents the outer links from
being decoupled from the structure entirely.
The results of this test are shown in figure 4.5. The outer links are kept at the
minimum amount of stress while still maintaining a feasible solution. The way
in which the optimizer maintains pressure on the outer links is rather interest-
ing, i.e. it recognizes the importance of the angle of the outer legs with respect
to the outer links. Only the vertical component of the force applied to the link
will result in an actual contribution to the relative stress. When the angle is
decreased, that contribution diminishes. However, the angle needed in this case
cannot be obtained by a direct connection, hence the slight bend supported by
an perpendicular member.
Figure 4.9a and b show the constraint values for both displacement and relative
stress. In reality there are 4 relative stress constraints, but only 1 is shown since
the others are either exactly the same -due to structural and load symmetry-
54

(a) Displacement constraint values.
(b) Link stress constraint values.
(c) SIMP values.
Figure 4.3: Results of the DAO test model. All data show con-
vergence: the displacement (a), stress (b) and the SIMP values
(c), which means the optimum is bounded by both the displace-
ment and stress constraint. SIMP convergence strengthens the
confidence in the penalization method.
or a mirrored function. This was discussed earlier in subsection 3.1.2 and an
example is shown in figure 3.6. It seems clear that the relative stress constraint
is active, whereas the displacement constraint is not.
55

Figure 4.4: Test for validating the optimization using relative
stress constraints.
Figure 4.5: Optimization of an block model with relative con-
straints. The topology is a direct effect of the imposed con-
straints.
56

(a) Displacement constraint values.
(b) Relative stress constraint values.
Figure 4.6: Results from the relative stress constraint model as
depicted in figure 4.1. Both constraint functions show intent to
remain feasible. One might notice the relative stress violates the
tolerance briefly, but corrects itself right away. The algorithm
is sufficiently resilient to deal with these violations.
57

Figure 4.7: A simple model to test the response of the optimizer
to coupled structures and possible ill-conditioning of the global
stiffness matrix. The relative constraints apply to the set of ver-
tical and the set of horizontal links. The dashed vertical line on
the left end of the model represents the axis of symmetry. Note
that this model is only 2D symmetrical, not axisymmetrical.
4.3 Coupled design spaces with relative constraints
Coupling structures is another important step within the optimization since we
are eventually planning on connecting both hull and turntable design spaces
using a simplified main bearing model. An anticipated problem -regarding FEA
and the optimization which is dependent upon it- is the possibility of an ill-
conditioned system of equations, which tends to arise when e.g. coupling a rigid
to a compliant structure. This phenomenon might well turn out to be pernicious
to obtaining the structural response and its derivatives. The problem can really
be reduced to the eigenvalue characteristics of global stiffness matrix K.
As mentioned earlier, not much is know about the effects of relative constraints
on topology optimization. If K(1) is ill-conditioned, the optimizer might only
exacerbate this initial state (more on ill-conditioning can be found in subsection
5.2.3). Or perhaps the algorithm might -after a few or so iterations- stumble
upon a structure that translates mathematically to ill-conditioning, causing the
optimization to become unstable. Although this test does not completely guar-
antee safeguarding from ill-conditioning, it might reinforce confidence regarding
the application in larger models. In order to test algorithm’s response to such
models, the model in figure 4.7 on page 58 is optimized using relative constraints
and a load preservation (displacement) constraint.
The results are not as straight forward as in the previous models. First of all, the
58

Figure 4.8: Objective and topology results from the model as
depicted in figure 4.7.
lower horizontal links are quickly rendered useless and therefore disconnected
from the structure as a whole. Disconnection inherently satisfies the relative
stress constraint since both stresses approach 0. The remaining relative stress
constraint does not seem to be active, but nevertheless it is satisfied. Instead the
displacement becomes and remains active from as early as k = 4. A possibility
might be the optimization is not bounded by the relative stress constraints.
In such a case, the bounding constraint would become the load preservation
constraint itself. As long as the relative constraints are met as well, the solution
remains within Γ.
59

(a) Displacement constraint values.
(b) Relative stress constraint values.
(c) SIMP values.
Figure 4.9: Results of the coupled design space model as de-
picted in figure 4.7.60

Chapter 5
Application to main
bearing support structure
With the mathematical framework and definitions in place, it is time to put it
to actual use. This chapter will discuss the precise details of how the support
structure, the main bearing cross section and the individual rollers and various
loadcases are modeled. It will do so in the following order:
1. FE modeling; Describes the general modeling of turntable, turret casing
and main bearing, but also the simplified modeling of the main bearing
rollers. Here the different domains within the FE-model are defined which
should help the reader to distinguish different sets of elements and their
relation with the optimization process.
2. General programming for all loadcases; Describes the application of
chapter 3 to the model presented in subsection 5.1.2. Some of these adap-
tations are of a programming nature, they describe how Matlab prepares
the input data for the optimizer. Others are mathematical adaptations to
cope with problems unique to the turntable/casing model. Furthermore,
an overview of the Ansys/Matlab-coupling is given. These adaptations are
general in the sense that they apply to both axi -and non-axisymmertical
loadcases. They are all the optimizer needs to handle axisymmetric load-
cases.
3. Additional programming for bilateral loadcases; Describes the addi-
tional adaptations unique to bilateral loadcases. These types of loadcases
are most interesting since they can describe the limit states to which the
turret and turntable are subjected, but they are also significantly more
complex.
61

To avoid confusion, keep in mind that structural axisymmetry is always main-
tained, but loadcases may be axisymmetric as well as bilateral. In the previous
chapter only plane stress models were evaluated. Of course, in reality, ax-
isymmetrical structures could never be accurately modeled with plane stress
assumptions; for one the stiffness would be severely underestimated and -even
worse- the horizontal translation of an element as a whole would not induce any
resistance. Also, one has to apply unrealistic boundary conditions in order to
avoid rigid body motions. On the brighter side, the only aspects that really
change are the elemental stiffness matrices and the switch from a Cartesian to
cylindrical coordinate system.
5.1 Finite element modeling
5.1.1 Element description
Three types of elements are used throughout this thesis (in both the turret
model and the test models discussed earlier in chapter 4). These elements are:
1. link180 for main bearing roller modeling
2. plane183 for axisymmetric loadcases
3. plane25 for bilateral loadcases
link180 is used in its most simple form, i.e. linear stress development and
compression as well as tension capability. Ideally, links should only be capable
of compression, not tension, since bearing rollers can only convey loads while
compressed. In order for link180 to be compression-only, Ansys needs to per-
form non-linear static analyses; these are analyses based on a Newton-Raphson
iterative solving method. However, non-linear analyses are incompatible with
plane25 and the axisymmetric option of plane183. This incompatibility is
avoided by issuing pre-tension in both the axial and radial rollers, making sure
the rollers always remain compressed to a certain extend. This, in itself, in-
cludes an assumption which shall be further discussed in subsection 5.1.3.
plane183 is an 8 node element with each node having 2 DOFs; radial and axial
displacement. The introduction of mid-side nodes makes this element better
at describing pure bending situations and avoid shear locking during iterations.
The increased number of DOFs does increase the computation time regarding
FEA and the calculation of topological derivatives, but does not affect the opti-
mization since the amount of elements within the design domain stays the same.
62

plane25 also has 8 nodes but with each having 3 DOFs; radial, axial and
tangial displacement. This ‘harmonic’ element is only used when applying bi-
lateral (non-axisymmetric) loadcases. It is, in essence, and expanded version
of plane183. The radial and axial displacement relations are similar, but
plane83 also has tangial displacements which only interact with other tan-
gial displacements within the element. These elements are further discussed in
section 5.3 in which bilateral loadcases are discussed.
5.1.2 Modeling and discretization
The Rosebank FPSO (which is being designed at the time of writing this thesis)
is used as a case study, and as such its dimensions are roughly used throughout
the modeling. The program only needs the global measurements, i.e. the sizes
of the bearing and turntable; the internal geometry is not of importance since
that will be the result of topology optimization. The size of the casing design
space (the design space that is actually part of the hull) is chosen freely, but
of sufficient size to make sure the optimization can utilize it in order to satisfy
structural constraints. It could well prove to be as important as the topology
within the turntable itself. Figure 5.2 and table 5.1 provide all dimension as
used in Ansys. All distances are dividable by 70, which is the element size that
provides sufficient resolution without overreaching the available computation
power. These dimensions are readily changeable, meaning the user is free to
chose different shapes as long as the chosen dimensions remain a multiplicity of
70.Table 5.1: Value of spatial dimensions as shown in figure 5.1.
Symbol Dimension Value [mm]
a Core radius 4200
b Outer radius 12460
c Turntable overhang 1120
d Turntable height 4900
e Turntable depth 700
f Inner radius 12460-700
g Casing width 2800
h Casing height 3500
The various areas are divided in different domains. In the previous chapters
we already defined (or hinted at) some domain specifications. The precise def-
initions of all specified domains is listed for convenience in table 5.2 and their
relation to each other can be found in figure 5.2.
63

Figure 5.1: The default model dimensions of Θ as used in FEA.
All dimensions are adaptable to a certain extend. The model
resembles the one used in figure 4.7 and the mirrored image of
figure 2.2, except that this model is axisymmetric about the axis
shown on the left. This means that this model has a cylindrical
gap in the center.
Table 5.2: Domain definitions
Symbol Domain Type
Θ Entire FEM domain. plane,link
Ω The set design variables x. plane
Φ All elements within main
bearing.
plane,link
Π Elements modeling main
bearing cross section area.
plane
B Link elements affiliated
with roller modeling.
link
Υ Link elements affiliated
with roller relative con-
straint functions.
link
The domain dimensions determine the eventual mesh resolution of Ω. The finer
Ω is discretized, the more detailed the topology can be described, but the more
demanding the algorithm will become. The element size of 70 mm is chosen in
an empirical fashion, i.e. based on experience obtained for chapter 4. Ansys
64

Figure 5.2: The domains represented schematically in relation
to each other. The size of the set is approximately indicated by
the size of its bubble. Throughout the thesis, a domain might
either represent the DOF, node or element numbers of which it
consists. Domain definitions are given by table 5.2. It can be
verified that, e.g. Υ ⊂ Φ ⊂ Θ.
will try to mesh with element size 70 where possible, but it will deviate when
the geometry is not dividable by 70. Therefore, the dimensions of the Rosebank
will be slightly adapted so as to ensure the mesh algorithm creates an uniform
plane mesh. This is only a necessity for elements within Ω. plane-elements
within Π can be meshed in any shape or form, as long as they abide the shape
criteria. They will be discussed in 5.1.3.
5.1.3 Main bearing modeling
The main bearing is the bridge between two design spaces; a substantial part
of the loads have to be conveyed by it. The manner in which these loads
are conveyed will determine the distribution on the bearings and hence their
performance. Figure 5.3 a through c shows different perspectives on the main
bearing model. In the following paragraphs the different aspects of main bearing
modeling will be explained.
Bearing rings
The model has two bearing rings: an inner ring connected to the turntable and
an outer ring connected to the casing. Both are unaffected by the optimiza-
tion (as Π 6⊂ Ω), they only serve as a container for the rollers and bridge the
discretization difference between the design spaces and the rollers (hence the
irregular mesh). In order to simplify the programming as much as possible,
65

clearances between the rings were neglected. In reality, gaps ranging from 0.15
to 0.75 mm are maintained between the rings to account for the space needed
for lubrication and deformation. The model does not include that space and
one might therefore misinterpret the mesh in figure 5.3c as if the two rings were
connected. However, the inner and outer elements share no nodes and contact
between the inner and outer ring is not modeled; they are only allowed to con-
vey forces through the rollers. In certain loadcases this could result in the rings
seemingly overlapping, this has no implications on the accuracy of the model
and can therefore be disregarded.
Rollers
There are various ways in which a roller bearing could be modeled. One of the
most accurate ways would be to introduce a special branch of elements, called
‘contact elements’, also commonly used by the industry. However, given the
non-linear behavior of these elements and the fact that their topological stress
derivatives will probably be rather difficult to obtain, these are outside of the
scope of this thesis. In light of the goal to just maintain uniform stress distri-
bution, the choice is made to introduce a simpler bearing model using only a
set of link elements. A major drawback of this method is the incompatibility of
non-linear analyses and the plane-axisymmetry option in Ansys. This problem
is solved using bearing pre-tension (see 5.1.3).
As shown in figure 5.3b, each bearing is modeled with ‘constraint’ links and
‘support’ links. The support links purpose is solely to provide a better force
transfer from the inner to the outer main bearing ring (a minimum of 5 links
in total is required). The constraint links are the elements which are actu-
ally monitored by the optimizer in order to compare stresses and establish the
relative stress function values f∆σ. They are allowed to rotate freely, thereby
ensuring the support structure is allowed to rotate. Of course, large rotations
are not expected (and actually constraint in some sense by the displacement
constraints) but since the main bearing has to convey such large forces it could
be that even small rotations might cause significant derivative errors if they are
based on links with fixed orientation. This effect is account for in ‘Derivatives
for arbitrary orientation’, subsection 3.3.5.
The properties of the rollers can be chosen freely by either adapting their
Young’s modulus or increase their ‘area’ real constant in Ansys. This area
has no physical meaning, but it can be set such that the links combined provide
a good approximation of the roller stiffness. Both types of links together make
up set B and Υ (see figure 5.2), meaning they are not part of the design domain
66

and their stiffness will remain unchanged during optimization. Although the
eventual stiffness within a roller will vary linearly to ensure initial feasibility,
i.e. x(1) ⊂ Γ, more on which later (see subsection 5.2.5).
Bearing pre-tension
In reality, the main bearing is hydraulically pre-tensionsed in the axial direc-
tion and this has a significant effect on the roller load distributions. Rothe
Erde applies this pre-tension in order to keep the upper and the lower raceway
rollers under constant compression. From a FEM modeling point of view, this
is perfect since linear static analyses will still be accurate even when describ-
ing intrinsic non-linear behavior of the rollers. However, the radial bearings
are not subjected to any pre-tension and, as a result, they may theoretically
become partially of fully unloaded. This is unacceptable since linear analyses
will cause the respective links to becomes tension loaded, thus rendering the
solution invalid; the stress in all links must remain negative (as discussed ear-
lier, see subsection 5.1.1). To circumvent this problem, radial, as well as axial
pre-tension, is included. This is an assumption of which the potential technical
implications are not studied in detail, but they do not strike one as unfeasible
when dealing with a 4-raceway bearing. It would not be possible to use this
approach with a 3-raceway bearing because in order to ‘pinch’ the rings in the
radial direction you do need two separate radial raceways. Both axial and radial
pre-tension are modeled with a single link and the inistate-command in Ansys.
5.2 General programming for all loadcases
Models describing 3 dimensional, axisymmetric structures can be reduced to 2
dimensional models when they abide certain criteria. When subjected to an
axisymmetric load, the deformation will also be axisymmetric. The stress dis-
tribution in the tangent direction (also referred to in the literature as ‘hoop’
or circumferential stress) is then assumed to be equal for all radial planes. In
any radial plane, all corresponding elements will only deform within that ra-
dial plane. Though the structure might be presented in 3D space, the problem
can be reduced to two cylindrical dimensions: radial and vertical DOFs. This
greatly decreases computation costs, therefore most FEM programs include ax-
isymmetric elements, including Ansys.
5.2.1 Topological derivatives
We can write the objective and constraint values and derivatives as they will be
determined by the optimization algorithm. Matlab is a matrix-based computa-
67

(a) Technical drawing of main bearing as produced by Rothe Erde. It shows both
rings, 4 roller bearings and the axial pre-tension bolt.
(b) A schematic cross section of the 4 raceway main bearing with left the inner ring
and right the outer ring. Each roller is modeled with 2 constraint links (solid red) and
3 support links (grey dashed), except the main (or axial) roller which is modeled with
5 support links sine it is significantly larger. The numbers show the sequence in which
the constraint links are ordered within the set Υ and in each subsequent dependent
matrix. The set B contains both the constraint and support links.
(c) The discretized main bearing as modeled in Ansys. The mesh is irregular, which
is caused by the size difference between the link spacing and design elements (the link
space is half the design element size). The irregular mesh does not complicate the
optimization since Π * Ω. Note that although the rings seem to be connected, their
elements do not share any nodes.
Figure 5.3: Various representations of the 4-raceway main bear-
ing system.
68

tion program, and as such it is preferable to perform matrix-based calculations
rather than a series of nested programming loops. Preparing the functions and
derivatives basically entails the application of various algebraic manipulations
(using various mapping matrices denoted M), but it will in any case proof use-
ful when understanding and/or checking the programming itself. During this
progress, references to chapter 3 will be made when necessary. The mapping
matrices used in the following equations are defined by
M1 =
1 0
0 1
−1 0
0 −1
, M2 =
1
0
1
0
T
, M3 =
0
1
0
1
T
, M4 =
(1 −1
−1 1
)
The first derivatives of all constraints are assembled in the Jacobean J(k) such
that all relative stress constraint functions f∆σ are found at the top and the
displacement constraints fu at the bottom, such that
J = ∇f =∂f
∂x=
(∂f∆σ∂x
∂fu∂x
)T(5.1)
From hereon, let’s denote the subset DOFs belonging to nodes of the constraint
links as uΥ ⊂ u. The set containing the horizontal and vertical distances
between these nodes then becomes
∆uΥ = uTΥ
(I(8) ⊗M1
)+ LT (5.2)
With ∆uΥ we can easily determine the set of link orientation angles β (as
defined in figure 3.7). These angles are used to determine the contribution of
the global displacements to the displacements in the local coordinate system.
This contribution factor is defined
c = sin (β)T(I(8) ⊗M2
)+ cos (β)
T(I(8) ⊗M3
)(5.3)
and is not dependent on j. gj represents the local displacement derivative values
for uB, i.e.
gj = c
(^
UT
ku
)j
(5.4)
wherein the first term accounts for the change in global displacements trans-
formed to local values. The contribution of the vertical and horizontal dis-
placements of each node have to be added in order to determine the total local
displacement of each node, which is defined by n. This is a simple summation
of the appropriate components within g. We then obtain
nT = gTj ·(I(16) ⊗ ι(2)
)(5.5)
69

Consequently, the stress in each constraint link becomes
∂σ
∂xj= pEgx
p−1j Bn (5.6)
By mapping (5.6) using M4 we attain the derivatives for the constraint functions
within the set Υ
∂f∆σ∂xj
=(I(4) ⊗M4
)· ∂σ∂xj
(5.7)
Therefore, the Jacobean as defined (5.1) becomes
J = ∇f =
∂f1∂x1
· · · · · · · · · ∂f1∂xn
− ∂f1∂x1
· · · · · · · · · − ∂f1∂xn
.... . .
...∂fm−1
∂x1· · · · · · · · · ∂fm−1
∂xn∂fm∂x1
· · · · · · · · · ∂fm∂xn
(5.8)
J is a [m× n]-sized matrix wherein n m. As mentioned earlier, the relative
stress constraint f∆σ are arranged at the top of the matrix, the load preservation
constraints fu at the bottom. The load preservation constraints have no mirrored
cousins, hence the absence of a minus sign at the bottom two (displacement)
constraint functions in (5.8). A last note on the constraint function derivatives:
It’s easy to confuse the appropriate sign of the derivatives. Note that each
derivative provides the response of the constraint function upon a ∂x increase
in density, not decrease. This might prove a little counter intuitive since the
objective is -of course- to decrease density and structural mass alike. Recall the
model shown in figure 4.4 (page 56) and its vertical displacement constraint at
the top center node
fu = −v − τ 6 0
∂fu∂xj
= − ∂v
∂xj
Now imagine a increase of a particular density in the model. As a result, the
displacement at the top will decrease. As a downward displacement is defined
by a negative sign, a decrease in displacement yield a positive displacement
derivative. The constraint function derivative will therefore have positive sign.
In short, when looking at derivative contour plots, ∂fi/∂xj 6 0 indicates regions
where removing elements would bring more ‘pressure’ onto the constraint func-
tion. ∂fi/∂xj > 0 indicates regions that will relieve pressure on the constraint.
70

5.2.2 Displacement decomposition
Testing axisymmetric structures on their response derivatives revealed that -
as mesh resolution was increased- the turntable regions with less deformation
returned faulty derivative values, visualized as noise in contour plots. This is
due to the fact that the turntable is only supported at the main bearing; upon
loading, a substantial part of the nodal displacements is due to vertical motion
of the turntable as a whole, here referred to as element translation (ET). The
elemental deformations (ED) are rather small with respect to the translations,
even more so when the element size is decreased, therefore numerical errors oc-
cur when calculating the derivatives. They are not cumulative as the derivative
information is not exchanged between iterations, but they do confuse the op-
timizer and cause instability. Regions with relatively large ED (e.g. the main
bearing where all forces are transferred to the hull) are less susceptible to these
errors. The casing itself has very limited ET since it contains the boundary
conditions. Two dimensional non-axisymmetric structures are less affected by
this type of error because they lack the increased stiffness due to increased stress
in the tangial direction. Their translation/deformation ratio is much more fa-
vorable than would be the case in axisymmetric structures.
The numerical errors are a pure result of computational precision. Matlab reads
FEA data from Ansys and stores it in double-precision floating point format.
A 32 bit operating system uses two 1 storage locations to store such a number,
allowing for a 15 digit precision for mathematical manipulations. Now, a nodal
displacement of the turntable can be split in both element translation and el-
ement deformation. In the axisymmetric case there is a significant difference
in magnitude between the two components. It is this difference that results in
numerical noise within the derivative contour since Matlabs finite precision in-
evitably causes loss of information when evaluating such numbers. E.g., consider
the following number
+0. 100000000000000︸ ︷︷ ︸Double precision
619150012︸ ︷︷ ︸Deformation
e - 08
which represents a nodal displacement of an arbitrary point in the turntable.
This number consists of the sum of a general element translation of 0.1e−8 and a
nodal contribution to element deformation. If Matlab were to store this number
in double-precision format, some deformation information would be lost since
the precision is bound to 15 digits. Thus, all mathematical procedures within
Matlab will be performed with the number
1Hence the name ‘double’.
71

+0.100000000000001e− 08
which includes a round-off error which results in a 62% overestimation of the
deformation displacement of that particular DOF. Errors of this size are capable
of creating substantial noise within the derivative contour, even rapid alterna-
tion of sign within a group of adjacent elements.
Because this effect is due to the difference in magnitude between ET and ED, it
means that it is a intrinsic property of the structure itself. It cannot be solved
by changing the unit convention. If one adapts the modulus of elasticity Eg the
magnitudes of k and u would lie closer together. However, is does not solve the
problem of the displacement having two components of different magnitude.
Fortunately, Matlab does store all information provided by Ansys, whose output
can range up to 25 digit precision. It is only upon performing calculations that
Matlab reduces the precision to a double format. If the displacements were to
be split in two separate terms of different magnitudes, one can retain numer-
ical precision in both cases. This method will be referred to as ‘displacement
decomposition’.
The numerical precision problems that arise with turntable-like structures can
be tackled using displacement decomposition, which means we describe the
derivative as a superposition of ET and ED components, such that
^uT
ρ ku =^uT
ρ,RkuR +^uT
ρ,εkuR +^uT
ρ,Rkuε +^uT
ρ,εkuε (5.9)
in which the index R (for ‘rigid’) refers to the ET component and ε refers to the
ED component. In each term, round-off errors are limited since only information
of the appropriate magnitude is used. The ET displacement itself is composed
of a horizontal and a vertical displacement vector, i.e.
uR = vR ⊗
1
0
+ wR ⊗
0
1
(5.10)
in which
vR = ι(n) min(|v|)
(1
n
∑n
sign (vn)
)α
wR = ι(n) min(|w|)
(1
n
∑n
sign (wn)
)α
72

For a plane element with mid-side nodes, n will be equal to 8. The ED displace-
ment is simply defined by
uε = u− uR (5.11)
If α is a positive odd number (i.e. α ∈ 2N − 1), then the following condition
holds
limα→∞
(1
n
∑n
sign (un)
)α=
0 for sign (u) 6= ±n1 for sign (u) = n
−1 for sign (u) = −n
Per default, α = 101 deems sufficient to reduce the effect on elements not
prone to ET. In both an axisymmetrical and plane stress structures a vertical
translation of an element does not result in any nodal forces (i.e. fR = 0),
it merely means a solid ring of material is being moved either up or down.
Therefore, these displacements do not contribute to the topological derivative
and we can neglect them without consequence. A simplified turntable/casing
structure model was constructed to pinpoint the source of this (then unknown)
numerical error. The effect of displacement decomposition can be seen in figure
5.4a and b. By retaining precision in both the ET and ED terms in (5.9) the
derivative contour shows smooth gradients in all regions, also those far removed
from boundary conditions.
(a) Without displacement decomposition. (b) With displacement decomposition.
Figure 5.4: The effect of rigid body motion correction on the
topological derivatives of a simplified turntable/hull structure
(both figures have the same color scale and range).
5.2.3 Coefficient ratios
Another computational/numerical error occurs when the stiffness matrix (which
Ansys generally refers to as ‘coefficient’ matrix since not all problems are of a
structural nature) consists of values having vastly different magnitudes, or (the
73

way that Ansys refers to the problem) the ratio between coefficients becomes
too small. This phenomenon is also known as ‘ill-conditioning’. In a sense, these
numerical errors are of the same ‘precision’-related nature as the ones described
in subsection 5.2.2, however, they do not necessarily lead to ill-conditioning
since this also depends on the specific composition of any particular matrix. A
telling example of this is given in [5] where two springs with greatly varying
stiffness are connected in-line. The manner in which forces and boundary con-
ditions are applied determines whether or not the system will be susceptible to
ill-conditioning.
As it turns out, the global stiffness matrix K(k) of the support structure model
is susceptible to ill-conditioning, depending on the chosen χ. A tell-tale sign
of this is the fact that results from the optimization shows violent perturba-
tions in some (or all) structural responses that, consequently, cause unstable
optimization. This means the algorithm still optimizes using correctly calcu-
lated derivatives, but Ansys returns faulty values based on a K that became
ill-conditioned somewhere during the iteration process (since K(1) most likely
is not ill-conditioned due to initial conditions x(1)j = χj , ∀j). Hence, one needs
to be cautious when choosing the lower bound of χ.
The choice of lower bound is a trade-off. On one hand the structural influence of
‘discarded’ elements must be insignificant (χ−→ 0), on the other, ill-conditioning
has to be avoided (χ−→ χ). Determined in an empirical fashion, χ
−= 0.1 proves
an appropriate value to ensure both. This means that, account for the effect of
penalization, the stiffness of an discarded element is a factor 10−3 of the original
stiffness.
5.2.4 Scaling
Another important adaptation to the objective and constraint functions and
derivatives is scaling. This is an adaptation regarding programming considera-
tions, and it also applies to the design variables themselves. The algorithm is
unable to deal with very large or very small values and derivatives which increase
the chance of instability (also cause by the same numerical errors discussed in
the previous subsections). To avoid this problem, we introduce a scaling vector
s and applied a element-wise product of the objective and constraint functions
as defined in S (3.9). This yields
f = (r− τ ) s 6 0
∇f = ∇r(ι(n),T ⊗ s
)6 0
: 1 6 τisi 6 100 ∀i (5.12)
wherein r is the set consisting of multiple types of response values (in this case
74

displacement, stress and relative stress).
5.2.5 Initial feasibility
The Rosebank is already designed such that the roller load distributions -in
theory- are within acceptable ranges, so FEM analysis of a detailed model should
yield a solution within Γ given the applied loads and their positions. But this is
an already completed structure. In order to give the optimizer the most flexible
set up possible, the initial design spaces are fully closed and solid, i.e. x(1) = χ.
This means that, if the same loadcase is applied, the initial constraint values
f(1)i could well prove to be non-feasible. Certain optimization algorithms do
not necessarily require a feasible start-off, the primal-dual Newton method can
only cope with these types of situations conditionally. It is therefore advisable
to adapt the structure to provide acceptable initial constraint values. These
adaptations can be made in the following ways:
1. Adaptation of the loadcase: Change the force magnitude and locations or
change the bearing pre-tensioning.
2. Change elemental properties within Φ.
3. Change elemental properties within Ω, thereby changing the initial topol-
ogy x(1).
Adaption of the loadcase is not obviously not preferable; one inevitably looses
the guarantee the resulting structure will perform satisfactory under different
loadcases. Remember that by taking a severe loadcase we do not automatically
satisfy less severe loadcases, due to the fact that there are relative constraints
involved. Changing the initial elemental properties within Ω means we are
basically already introducing a bias towards a certain structure, which actually
impedes the main advantage of topology optimization to certain extend and
therefore also not really preferable. What remains is the adaptation of the
rollers. To achieve initial feasibility, the elasticity within each roller is assumed
to be a linear function of its length. Varying elasticity in the manner might, for
example, simulate the angle or tapered geometry of an roller of each individual
raceway. However, this is an assumed condition and no further research is done
within this thesis. In future models, it could be considered converging the roller
elasticity to a uniform state during iterations, or perhaps find an approach for
changing the initial state x(1) in such a way that no definite structural bias is
introduced within the optimizer.
5.2.6 Asymptotal increase
As discussed in subsection 3.2.1, one of the main advantages of MMA is the fact
that the optimization can be sped up of slowed down by setting separate bound-
75

aries for all asymptotic approximations, hence the name ‘moving’ asymptotes.
As admitted by Svanberg [20], the factor with with these boundaries are allowed
to extend or contract are chosen in a heuristic manner. In a multi-constraint
problem with lots of conflicting interests, such as the current problem, it is
preferable to air on the safe side regarding boundary expansion. If we allow the
boundaries to expand too rapidly, especially in the first iterations, the algorithm
might not notice and skip a path towards a more optimal design. Once passed,
it is less likely, though not inconceivable, it will reroute and still converge on
this solution. Altogether, it is better to accept slightly increased computational
demands than running this risk.
5.2.7 Ansys-Matlab coupling
It would be possible to contain the entire algorithm within Matlab. This means
the FEM analyses would also have to been done internally. As the size and geo-
metrical complexity of the model grows, so does the programming in Matlab, to
the point it becomes rather strenuous. For this exact reason, the algorithm in
this thesis calls upon Ansys (a dedicated FEM program) to build models, assign
numbering and perform the needed structural analyses. To solve for W(k) each
iteration both Matlab and Ansys are used and they exchange data by writing it
to the harddisk. Matlab governs the entire program, calculates function values
and their derivatives and does the actual primal-dual optimization. The entire
algorithm is shown schematically in figure 5.5 in which it is split up in sev-
eral blocks representing the most important activities. Notice that the blocks
which are evaluated by Ansys are enclosed in the dashed rectangular section,
all others are accounted for by various (nested) Matlab scripts. Completing the
primal-dual Newton optimization, the algorithm can either restart the process
for the next iteration k+ 1 or it can reach convergence after which the solution
is presented.
Almost all steps are described at some point in this thesis, but a note has
to made concerning the central path in figure 5.5 regarding the stiffness matrix
export and conversion: In order to ensure Matlab and Ansys work with identical
stiffness matrices kj ∀j, they are exported forehand. They are exported only
once with a separate algorithm and need not be part of the optimization loop
since (3.20) adapts each kj through its modulus of elasticity. Furthermore,
elements with the same radial position will have equal k(1), thus the algorithm
will only have to export matrices for each radial position. The reason for using
Harwell-Boeing format is not of immediate importance, but will be elaborated
in the corresponding section(s) in appendix ??.
76

Figure 5.5: Schematic representation of the entire algorithm.
The core programming is done Matlab, but embedded is a func-
tion which calls upon Ansys to perform FEM analyses. This
Ansys module is shown within the red dashed rectangular sec-
tion. S refers to the subproblem defined in (3.9) and W refers
to the dual objective function defined in (3.16).
77

5.3 Additional programming for bilateral load-
cases
(This section has been omitted for legal reasons. Please contact E.vanVliet-
[email protected] for more information.)
78

Chapter 6
Results
Two separate loadcases are examined: an axisymmetric and a bilateral one.
As explained in chapter 5, axisymmetric loadcases use plane183 as their main
element, whereas bilateral uses the harmonic plane25. The axisymmetric load-
cases are only able to describe the gravitational loads on the turret, whereas the
bilateral loadcases can describe a wide range of different situations. For each of
the two loadcases the results shown in this thesis include (in this order)
1. Relative constraint values
2. Displacement constraint values
3. Objective function values
4. SIMP values
5. Computation time
6. Topology
all of which are displayed as a function of iteration number. The topology (or
density visualization) actually shows what parts of the structure are degraded
and subsequently removed, and which parts remain essential as the iterations
pass. The results shall be commented on in the corresponding caption of that
particular graph.
79

6.1 Axisymmetric loadcase
The gravitational loads include the turntable as well as the turret and riser/um-
bilical weights, but can be adapted as required. This loadcase only incorporates
the math discussed in section 5.2, not that of section 5.3. The results of the
loadcase shall be discussed in the caption of each graph (figures 6.2 through
6.7). The detailed set-up of the algorithm is shown in the table below.
Symbol Description Value
τ∆σ Relative stress tolerance 0.05 MN
τρ Displacement tolerance 10%
Initial boundary expansion 0.5
Explicit boundary expansion 1.1
Explicit boundary contraction 0.7
p Penalization factor 3
χ−
Lower density boundary 0.1
Turntable load 15 MN
Riser hang-off load 5 MN
Element types plane183, link180
Boundary conditions Casing edges clamped
Element size 70 mm
Figure 6.1: Axisymmetric loadcase.
80

Figure 6.2: Relative stress constraint values of the axisymmetrical load-
case. In reality there are 8 relative stress constraints (as explained in subsection
3.1.2), but only the 4 closest to the 0-boundary are relevant. The other, mir-
rored functions are left out for clarity. These results show that 3 of the 4 relative
constraint sets are active, i.e. they converge towards the feasible boundary. The
fourth, the lower axial roller, is not active but slightly swaying back and forth.
Since the objective is to minimize mass, the constraints do (theoretically) not
necessarily need to converge. However, as more elements are removed, they will
most likely be forced to. The lower axial constraint will also converge, when
given enough time. During this convergence the overall structure will not change
significantly, it is therefore decided to save the additional computation costs.
81

Figure 6.3: Displacement constraint values of axisymmetrical loadcase.
Both displacement constraint show convergence towards the feasible boundary.
This being the case, they do impose some structural stiffness on the solution,
which needed since relative stress constraints alone do not provide a sufficiently
bounded optimization problem (as discussed in chapter 4). During this test, the
displacement constraints were set at 10% of their initial displacement values, but
can always be adapted as required.
Figure 6.4: Objective function values of axisymmetrical loadcase. The
objective shows an overall decrease with steady speed, converging on a lower
bound that represents the minimal mass needed to support the applied loads
and satisfy all imposed constraints at the same time. The detailed view (right)
does show the algorithm’s decision to slightly back track and add mass, rather
than removing it (at iteration number 16 and 17). At that time, none of the
constraints are that close to the feasible limit, so it is hard to point out an clear
reason why that decision is made.
82

Figure 6.5: SIMP values of axisymmetrical loadcase. The SIMP values
also show a nice convergence towards 0. Since the initial design space is fully
enclosed, none of the variables are in an intermediate stage. In the beginning
iterations a peak value in intermediates can be observed, after which the amount
steadily declines as penalization filters them out. This behavior is logical since
the optimizer is stuck to the initial boundary expansion, it cannot simply remove
rudimentary elements in one iteration.
Figure 6.6: Optimization computation time. The time per iteration starts
off at about 45 minutes, but as the constraint functions reach the limits of
the feasible domain and start to show more profound contradictory demands,
the algorithm takes longer to find a minimum in W. A salient dip is found
between iteration 32 and 37. This is due to the fact that the lower axial relative
constraint finds some leeway and start to move away from its boundary.
83

Figure 6.7: Topology. Iteration 3, 7, 11, 18 and 40 of the axisymmetrical
loadcase. The intermediate iteration between 18 and 40 show only small adjust-
ments which are less important. Note that in each figure the left edge represents
the axis of symmetry. Between the turntable on the left and the casing on the
right we see a solid black square which represents the main bearing.
84

6.2 Bilateral loadcaseTo run the complete model, the bilateral loadcase representing the rolling motion
of an FPSO is used, as shown in figure 6.8 (as was already used in an example
in figure ??). As in the previous section, the results will be explained in the
caption of each result (figures 6.9 through 6.14). The detailed set-up used in
the bilateral loadcase is shown below.
Symbol Description Value
τ∆σ Relative stress tolerance 0.05 MN
τρ Displacement tolerance 10%
Initial boundary expansion 0.5
Explicit boundary expansion 1.1
Explicit boundary contraction 0.7
p Penalization factor 3
χ−
Lower density boundary 0.1
Turntable load 15 MN
Riser hang-off load 5 MN
Transverse load 1 MN
Overturning load 1 MN
Element types plane25, link180
Boundary conditions Casing edges clamped
Element size 70 mm
Figure 6.8: Bilateral loadcase.
85

Figure 6.9: Relative stress constraint values of the bilateral loadcase. In
reality there are 8 relative stress constraints (as explained in subsection 3.1.2),
but only the 4 closest to the 0-boundary are relevant. The other, mirrored func-
tions are left out for clarity, as was also done in the axisymmetric counterpart
in figure 6.2. All relative constraint functions seem to converge, although the
outer radial constraint is lagging behind just a bit.
Figure 6.10: Displacement constraint values of bilateral loadcase. In
comparison to its axisymmetric counterpart in figure 6.3, the bilateral loadcase
creates more volatile displacement constraint responses and although they seem
to converge, they do so in a less behaved fashion. This probably due to the fact
that with the inclusion of bilateral load distributions, the relative constraints
gain more prominence.
86

Figure 6.11: Objective function values of bilateral loadcase. The objec-
tive shows an overall decrease with steady speed, converging on a lower bound
that represents the minimal mass needed to support the applied loads and sat-
isfy all imposed constraints at the same time. The detailed view (right) does
show the algorithm’s decision to slightly back track and add mass, rather than
removing it (at iteration number 31 to 37). This is to counteract the sudden
increase in both displacement constraints (see figure 6.10). Although currently
the optimizer reaches a objective minimum at iteration 32, it will probably reach
a lower value when given enough time. But, since the overall structure will not
change significantly, this is considered unnecessary.
Figure 6.12: SIMP values of bilateral loadcase. As in the axisymmetric
counterpart (see figure 6.5, the SIMP values also show a nice convergence to-
wards 0. Since the initial design space is fully enclosed, none of the variables are
in an intermediate stage. In the beginning iterations a peak value in intermedi-
ates can be observed, after which the amount steadily declines as penalization
filters them out. This behavior is logical since the optimizer is stuck to the
initial boundary expansion, it cannot simply remove rudimentary elements in
one iteration.
87

Figure 6.13: Optimization computation time of bilateral loadcase. The
time per iteration starts off at about 45 minutes, but as the constraint func-
tions reach the limits of the feasible domain and start to show more profound
contradictory demands, the algorithm takes longer to find a minimum in W, as
was also the case in the axisymmetric loadcase.
88

Figure 6.14: Topology. Iteration 2, 5, 9, 15 and 40 of the bilateral loadcase.
The intermediate iteration between 18 and 40 show only small adjustments
which are less important. Note that in each figure the left edge represents the
axis of symmetry. Between the turntable on the left and the casing on the right
we see a solid black square which represents the main bearing.
89

Chapter 7
Conclusions
7.1 Program stability and convergence
Within the set of assumptions as shown in section 2.4, both the TOP-algorithms
(axi -and bilateral symmetric loadcases) show stable behavior and convergence,
which ensures the derivative calculations as proposed in chapter 5 are accu-
rate (at least to a satisfactory extend). Not only do the solutions converge
toward multiple or all constraints imposed on the structure, they also converge
on the demand for solid models using the SIMP-method. Usually, the displace-
ment constraint functions show a kind of dynamic behavior in which they first
overshoot their boundaries into the non-feasible domain. This, in itself, is no
problem; intermediate solutions are not required by MMA to stay within Γ and,
hypothetically, it could be the case that in order to reach an optimum, the
algorithm has to navigate through some non-feasible intermediates. Although,
there is no clear reason to believe that this is currently the case. A more likely
candidate is fact that the initial asymptotic boundary expansion (as discussed
in subsection 5.2.6) is set too high, allowing the optimizer to try and speed
up convergence. This initial increase factor determines the speed at the first
two iterations, after which the normal boundary expansion (which is an explicit
function, using the data from previous iterations) takes over. It was only the
latter that was decreased manually, the initial retained its original value.
The amount of design variables and constraint functions cause moderate com-
putation times, between 1 and 3 hours per iteration, with around 40 iterations
to reach full convergence. There are, however, certain demands which tend to
cause excessive computation time, indicating that the Newton-method has some
difficulty searching for minimums. These occurrences were rare and are prob-
ably linked to some ill-posed combination of constraint tolerances or an initial
start condition that is sufficiently outside the feasible domain Γ, but also a too
90

conservative limitation to the boundary increase of the moving asymptotes (as
discussed the previous paragraph) might prove to be a culprit.
7.2 Resulting structure
A detailed view of both solutions is shown in figure 7.1, wherein the focus is on
the structure directly connected to the main bearing. For both solutions, the
axisymmetric (7.1a) as well as the bilateral loadcase (7.1b), the optimizer has
a clear penchant for creating a tubular (or circular) structure incorporated in
the turntable. Furthermore, a slightly different structure emerges on the casing
side, supporting the outer main bearing ring. This is undoubtedly linked to the
deformations cause by the transverse, bilateral loads.
(a) Solution of axisymmetrical loadcase. (b) Solution of bilateral loadcase.
Figure 7.1: A close up view of the axisymmetric and bilateral
solution x(κ). Clearly, the solution shows to favor a tubular
structure around the inner main bearing ring. The solid square
in the center represents the main bearing itself (which remains
untouched by the algorithm).
The circular structure on the turntable side is actually more of a circle segment
as shown in figure 7.2a, it most likely emerges from particular characteristics
of such a geometrical shape. Then, what are these apparently favorable char-
acteristics? To answer that question the torsion behavior within two separate
models are examined, i.e.
1. A numerical axisymmetric model
2. A analytic cantilever model
91

In case of axisymmetric deformations (that is: axisymmetric loadcases) all radial
cross sections of a ring-shaped volume, described by a particular element, will
deform within that same radial plane, and they all deform exactly the same way.
This phenomenon is better know as ring torsion. Without any external bound-
ary conditions, a ring will resist rotation about its center line due to increasing
tangial stresses, sometimes referred to as ‘hoop’ stresses. A higher torsion re-
sistance will decrease the rotation of the inner bearing ring as well, which is
what the optimizer seems to prefer in almost all examined circumstances. Why
not a boxed construction instead of a circular one? To answer that question, a
separate numerical model was made comparing the two geometries as depicted
schematically in figure 7.2b and 7.2c (using the same plane183 elements as in
the TOP-programming). Since the algorithm is trying to minimize structural
mass, different geometries with equal cross section areas have to be examined.
Therefore the model takes radius r and thickness t as independent variables and
a as a dependent variable defined specifically to satisfy the equal surface areas,
i.e.
a (r, t) : AC = AB =1
2πr + t
(1− 1
4π
)(7.1)
(a) Schematic representation of
the circular structure adjacent to
the main bearing (Π) on the
turntable side (as proposed by the
optimizer).
(b) Circular structure with rota-
tion about the center line φC .
The red lines indicated constraint
equations coupling rotation and
displacements.
(c) Boxed structure with rotation
about the center line φB . The red
lines indicated constraint equa-
tions coupling rotation and dis-
placements.
Figure 7.2: Schematic models of torsion rings.
The resistance to torsion is approximated by applying a moment to each geom-
etry and determine the rotation about its center line, as shown in figure 7.2b
and 7.2c. Repeating the process while varying r and t produces the results in
figure 7.3a. Figure 7.3a is a torsional stiffness indicator of a circular ring, in
this case represented by 1/φC . The smaller the rotation φC about the center
92

line, the higher the torsional stiffness. As expected, we see an increase in this
particular stiffness when either increasing the cross section radius or thickness,
or both. The same effect can be found in an axisymmetric boxed cross section.
Upon examining the optimal shape (i.e. the shape with the least surface area),
figure 7.3b shows that, at least within a realistic range, the circular cross section
constantly has a higher resistance to torsion, especially profound in structures
with large radii and small thicknesses. When setting out to create a structure
that decreases the rotation of the inner main bearing ring, circular shapes prove
to be the most efficient.
(a) Indication of stiffness (1/φC) of a circular ring-
shaped structure as a function of r and t
(b) The ratio of rotation about the center line when
subjected to moment M (φC/φB).
Figure 7.3: Results of numerically evaluating ring-shaped struc-
tures with circular and boxed cross section subjected to torsion.
93

Also in non-axisymmetric loadcases, in which the cross section deformations
vary as a function θ, circular shapes are preferable. This can be shown in an
analytical fashion, by considering the torsional stiffness of a cantilever using
well-known relations as given by Roark [14] for cross sections as depicted in
figures 7.2b and 7.2c, i.e.
JC =1
2π(r4 − (r − t)4
)JB = t(a− 2)
2(a− t)
(7.2)
in which J denotes the polar inertia for a circular and boxed cross section
respectively. Now taking r and t as independent variables, t is defined as
t(r, t) : AC = AB =2πr − 4a
π − 4(7.3)
in which t ∈ [0,∞).
t equals 0 when the perimeter of both cross sections are equal, i.e. 2πr = 4a.
The surface plot of t(r, t) is given by figure 7.4a. The ratio of polar inertia, much
the same as the ratio in figure 7.3b, is examined in figure 7.4b. By looking at
figure 7.4b and 7.4a both, it is evident that circular shapes are favorable when
dealing with decreasing thickness. The polar inertia of a solid beam, however,
is higher that that of a circular one with equal cross section area, but solid
sections are of course avoided when trying to minimizing mass.
(a) Thickness t as a function of r and a. Note the un-
defined white areas in which t < 0 or t > r.
(b) The ratio of polar inertia of a cantilever model of a
boxed and circular cross section (JC/JB).
Figure 7.4: Results of analytically evaluating cantilever models
with circular and boxed cross section subjected to torsion.
94

Figure 7.5: The normalized bearing stress results from the bi-
lateral loadcase (shown in figure 6.8). The stress increase factor
shows how much the stress has increased from its original value
σ(1). We can see that the stresses pair up and stick together;
this is obviously due to the optimizer trying to satisfy the rel-
ative stress constraints. Note that all bearing stresses increase
due to pre-tension effects.
So, the optimizer sets out to increase the torsion stiffness of the inner bearing
ring, whereas the outer ring is made somewhat more compliant. Although this
solution emerges under a number of assumptions (such as neglecting the presence
of a lower bearing), it is has a sharp contrast with the ‘rigid ring’-concept [24]
which adds stiffness to the outer ring.
7.3 Increased main bearing loads
The constraint functions show us the relation between stresses on a main bearing
roller, they do not show the stresses themselves. Plotting the stress development
within the main bearing, as is done in figure 7.5, reveals an increasing load on
all rollers. This might seem odd, given the fact that the loads do not increase;
how can, for example, the loads on the axial orientated roller increase if we do
not increase the static vertical loads? The cause of this is directly linked to
removal of elements. During the first iteration all elements start off as solids
(x(1) = ι), and as such, the elements in the turntable adjacent to the main
bearing will be compressed due to the applied pre-tension; they are subjected
to ‘pinching’, if you will. As these elements are subsequently removed from
the structure, more and more of the pre-tension load is redirected to the main
bearing, hence the increase in roller loads. Pre-tension is there to compress
the rollers, and, in this algorithm, it is essential to keep them that way since
95

axisymmetrical FEA does not support non-linear analysis. Since the elements
which make up the main bearing (Π) are not part of the design domain, the
pre-tension cannot be ejected. There is no way for the algorithm to adjust or
reduce pre-tension when needed. This leads to the automatic assumption that
pre-tension (of a certain magnitude) needs to be incorporated, which might also
affect the solution. Incorporating pre-tension adjustment into the optimizer has
to be examined in future models, and since it has been discussed here, it will
only be mentioned shortly in the recommendations (chapter 8).
7.4 Evaluation of set goals
As a final conclusions, let’s recapitulate what the set of goals exactly was and
evaluate whether or not these were achieved. The list, as formulated in subsec-
tion 2.4, is once more given by:
1. Investigate the potential of topology optimization for the pending main
bearing issues.
2. Write a general mathematical framework for optimization with relative
stress constraints.
3. Write an optimization program capable of handling
(a) multiple (relative) constraints.
(b) the intrinsic non-linear behavior of roller bearings.
(c) axisymmetric as well as non-axisymmetric loadcases.
(d) data exchange between optimization and external FEM-algorithms.
4. Compute an optimum solution which can be used as an initial design and
provides structural insights concerning relative constraints.
The only goals that was not achieved (i.e. in the exact way it was meant) is goal
3b: the program’s capability of describing the intrinsic non-linear behavior of
the roller bearings. This is due to the fact that Ansys cannot perform non-linear
analyses while using axisymmetric option of plane elements, and to circum-
vent this problem, horizontal as well as vertical pre-tension were assumed. This
assumption, and the compatibility problem leading to it, were discussed in sub-
section 5.1.1 and 5.1.3.
Most of the assumptions in this thesis can be overcome by methods proposed
in the recommendations (chapter 8). Therefore, topology optimization can be
considered a serious candidate for solving problems of relative nature, and one
can find this relativity in other places than just the main bearing; also the
96

lower bearing and the swivelstack will probably be interesting subjects. Since
topology optimization is a rather unknown concept within the offshore industry,
a company such as BES might stand a lot to gain in expanding and utilizing
this type of knowledge.
97

Chapter 8
Recommendations and
contingencies
8.1 Constraints for failure modes
Up till this point, all failure modes, such as yield and fatigue, were ignored. If
the goal is to create a more accurate model, capable of designing not only an
initial design, but a readily usable turret/casing structure, one has to find a
way to incorporate such additional constraints. This is not an idea that is too
far-fetched, but, with defining such constraints, scrutiny is advised. The more
complex the demands become, the more complex its derivatives will be, as is the
case in e.g. subsection 8.5 on replacing link180 for contact elements. Research
has been done on this subject and papers were published for adaptations con-
cerning stress constrained topology optimization using so called cluster methods
[8]. Stress criteria should, realistically, apply throughout the entire structural
domain, potentially creating a vast number of constraints. To reduce this num-
ber to an acceptable level a so called clustering method is used. This method
might prove to be the first step towards incorporating fatigue constraints into
the optimization cycle. The effect of fatigue performance on the optimization
process and its solution is something BES regards as interesting since turntables
are rather susceptible to this phenomenon. A lot of monitoring and maintenance
is required to ensure the structural safety of the FPSO, which puts a strain on
the companies resources. Furthermore, some advances are made obtaining the
topological derivatives for buckling constraints, which grapples with a whole
different set of mathematical problems, that of structural non-linear responses
and instabilities.
98

8.2 Constraints in multiple radial planes
The constraints on the main bearing load distributions should ideally be imposed
on all radial planes, not just a particular one. The load distributions should be
within the set tolerance at any point on the circumference. For axisymmetric
loadcases this is not relevant since the structural response is also axisymmetric.
Hence, if one radial plane satisfies the constraint, that means they all do. In
non-axisymmetric loadcases this is no longer the case. Because there are an in-
finite amount of radial planes, this would mean the algorithm has to deal with
an infinite amount of constraint functions. For practical purposes, an appropri-
ate angle is chosen between constraint radial planes such that the number of
constraint functions is acceptable A reasonable assumption would then be that
if the constraint radial planes meet all requirements, the intermediate plane will
meet them as well.
However, this means that the derivatives for all constraint radial planes will
have to be calculated. More constraint functions would intuitively increase the
amount of unit load analyses even further, possibly to an unacceptable number.
Fortunately, the unit load analyses are valid for all radial planes when they are
merely rotated to the appropriate angle. This opens up the possibility for the
derivatives to be determined as a function of θ by means of convolution with
the structures physical response, i.e.
∂uρ (θ)
∂xj= pxp−1
j
(^uT
ρ (θ) ∗ ku (θ)
)or -more useful- in integral form
∂uρ (θ)
∂xj= pxp−1
j
2π∫0
^uT
ρ (τ) ku (θ − τ) dτ (8.1)
To avoid any unnecessary ambiguity, the choice was made to use a simplified
form of (??) shown on page ??; meaning, (8.1) needs to be adapted to include
the change of ka due to the mode of the applied load(s).
8.3 Incorporate pre-existing structure
Other departments pursue their own structural needs. The support structure is
also there to support equipment, guide risers and other piping. From these view
points, demands such as the need for horizontal layering of decks might follow.
However, the optimizer, up till this point, does not care about such demands.
Among other possibility, one might define a pre-existing, initial structure within
Φ such that the optimizer cannot simply discard it. It can, however, decouple
99

the structure if some type of connectivity to the main bearing is not ensured.
Defining this pre-existing structure should therefore be subject to engineering
scrutiny.
8.4 Lower bearing modeling
The effects of the presence of a lower bearing should, when correctly designed,
greatly affect the eventual loads on the main bearing; a full and accurate topol-
ogy optimization of the support structure cannot be considered complete with-
out it. In essence, it should not even prove too difficult or time consuming to
make a good approximation of this interaction. The turret extending down-
wards to the lower bearing can, for example, be represented by a simple beam
model, the end of which is connected to a partly constraint horizontal link el-
ement. The crux of this proposed model is that this link element has to be
non-linear in nature, something we have seen earlier is incompatible with ax-
isymmetric modeling. In the main bearing, this is solved using pre-tensioning.
The lower bearing, however, is not, and cannot be pre-tensioned. Disregarding
this would mean that the lower bearing can start to pull on the casing. Even
if this happens for a limited amount of iterations, and even if it happens in a
certain part of its circumference, it could well be enough to contaminate the
solution. Therefore, the presence of the lower bearing is neglected in this thesis.
Finding a solution to the incompatibility between non-linear static analysis and
axisymmetry would not only solve this problem, but would also eliminate the
direct need for proper pre-tensioning within the main bearing.
8.5 Contact elements
For a more accurate analysis of the interaction between the inner and outer main
bearing ring, a better way of modeling the roller is paramount. In this thesis
sets of link180 elements were used in order to retain simplicity of derivative
calculations; constraints were based on the stress difference between the two
most outer elements, and stress itself following from well defined displacement
derivatives. To include contact elements means determining whether or not
they are compatible with harmonic elements (such as plane25) and gaining a
deep understanding in how these elements behave mathematically. Non-linear
behavior might well entail that derivatives will depend on some type of iterative
calculation, greatly increasing computational demand.
100

8.6 Radial basis functions
The phenomenon ‘checkerboarding’ is well known within the field of topology
optimization. Its the pattern created by the algorithm such that direct neigh-
bors of a dense element have 0 density, while the diagonal neighbors have high
densities. This pattern resembles that of a checker -or chessboard, and it gives
the model a type of stiffness that is either too expensive or too difficult to man-
ufacture. Any sufficiently large region which displays this pattern can also be
regarded as mimicking an intermediate density, something SIMP is supposed
to prevent. Unfortunately, it is unable to do so since, technically, all demands
within P are satisfied. Huang [9] solves this problem by make the derivative value
of each element dependent on its neighboring elements, i.e. elements within a
certain radius r. Using all values within r, based on some averaging function
the new derivative values is calculated. Since derivatives are supposed to show
a smooth gradient within a derivative field this does should not affect the solu-
tion by much (one might observe a more persistent fuzzy state near structural
boundaries during intermediate iterations). In regions where the derivatives do
not show a nice gradient, this averaging will prevent them from turning into
checkerboard patterns. A more general way of manipulating the derivative field
would be to introduce a radial basis function. Radial basis functions are any
type of function that depend on the distance from the functions center, in this
case an arbitrary element j. The function describes in what way the derivative
value of j is influenced by its own value and that of its surroundings. Charac-
teristics of the elements, such as location or density, can also be incorporated.
Make the radial basis function depend on an elements location from another
point in space might be useful when only particular areas in the design space
are susceptible to checkerboarding. Caution is adviced, though, since we are
artificially changing the derivative field as calculated from real FEA data. If
not done correctly, the optimizer might become unstable.
8.7 Removal of obsolete elements
The optimizer has the objective to reduce mass while being subjected to pe-
nalization, therefore it will try to remove as many elements as possible without
violating constraints. In most cases, a lot of elements will be rendered obsolete
within, give or take, the first 10 iterations. The optimizer should, ideally, be
able to reintroduce some of these elements, and indeed it does so in particu-
lar situations. However, some elements turn out the be obviously rudimentary;
they drop down to χ−j
and flat-line. Still, these elements contribute to the com-
putation time of all processes: FEA, data exchange, displacement decoupling,
derivative calculations and eventual optimization. A possibility to discard these
101

elements fully (also within the finite element model) could potentially save a
lot of time (or, since the optimization time increases towards later iterations,
it might level off the time needed). The condition for eliminating elements
should be chosen carefully; only when an element, and those within its imme-
diate vicinity, show no penchant to contribute even in a slight manner, it can
be safely removed. Ansys provides this option in the ekill-command, but, as
in the compression-only state of link180, it can only be used when preforming
non-linear static analyses.
8.8 Pre-tension adjustment
Pre-tension adjustment refers to the optimizer’s ability to adapt the initial com-
pression of the main bearing rollers. This has been discussed in section 7.3 of
the conclusion, to which the reader is now referred.
102

(This page is left blank intentionally)

Bibliography
[1] J.R. Barber Elasticity. Department of Mechanical Engineering and Applied
Mechanics, University of Michigan, 3rd edition, Springer Science, 2010.
[2] S.P. Boyd Convex Optimization. Department of Electrical Engineering,
Stanford University, USA, 7th edition, Cambridge University Press, 2009.
[3] Y.K. Cheung Finite Strip Method, CRC Press, Boca Ratom, Florida, 1998.
[4] P.W. Christensen An Introduction to Structural Optimization. Division of
Mechanics, Linkoping University, Sweden, Springer Science, 2009.
[5] R.D. Cook, Concepts and Applications of Finite Element Analysis. Univer-
sity of Wisconsin, Madison, 4th edition, 2002, John Wiley and sons inc.
[6] T. Handreck Analysis of Large-diameter Antifriction Bearings in Conjuc-
tion with Customer-specified Companion Structures
[7] D. Henery Prospects and Challenges for the FPSO. Offshore Technology
Conference, 1995.
[8] E. Holmberg Stress Constraint Topology Optimization Devision of Mechan-
ics, Institute of Technology, Linkoping University, Sweden, Struct Multidisc
Optim, 48:33-47, 2013.
[9] X. Huang, Evolutionary Topology Optimization of Continuum Structures:
Methods and Applications. RMIT University, Australia, 1st edition, 2010,
John Wiley and sons inc.
[10] KPMG Being relevant; Suppliers to the Oil and Gas Industry Can Control
Their Own Future. 2013.
[11] S. Nishiwaki Optimal structural design considering flexibility. Computer
methods in applied mechanics and engineering, Elsevier, 190 (2001) 4457-
4504.
[12] J. Pollack Latest Breakthrough in Turret Moorings for FPSO Systems: The
forgiving Tanker/Turret Interface. Offshore Technology Conference, 1997.
104

[13] A. Rietz A first laboratory exercise in topology optimization using Matlab.
Department of Mathematics, Linkoping University, Sweden.
[14] W. C. Young Roark’s formulas for stress and strain. 7th edition, McGraw-
Hill, 2002.
[15] B.F. Ronalds FPSO Trends. Society of Petroleum Engineers Inc., 1999.
[16] C. Roos Interior Point Methods for Linear Optimization. Delft University
of Technology, the Netherlands, 2nd edition, Springer Science, 2005.
[17] O. Sigmund A 99 line topology optimization code written in Matlab. Struct
Multidisk Optim 21, 120-127, Springer-Verlag, 2001.
[18] O. Sigmund Topology Optimization - Theory, Methods and Applications.
Spirnger Verlag, Berlin, 2003.
[19] M. Sliwinksi Design Considerations in the Development of a Modular
FPSO. Vencor Technologies Limited, Ottowa, Canada, 2004.
[20] K. Svanberg, The Method of Moving Asymptotes - A New Method for Struc-
tural Optimization. International journal for numerical methods in engi-
neering, 24 359-373, 1987.
[21] K. Svanberg, A Class of Globally Convergent Optimization Methods Based
on Conservative Convex Separable Approximations. SIAM Journal of Op-
timization, 12 555-573, 2002.
[22] K. Svanberg, MMA and GCMMA, versions September 2007. KTH, Stock-
holm, Sweden, 2007.
[23] H. De Sterek, Introduction to Computational Mathematics. Department of
Applied Mathematics, University of Waterloo, 2006.
[24] European Patent Specification 0 338 605 B1 Ship with Mooring Means.
Single Buoy Mooring Inc, 1989.
[25] United States Patent 6 263 822 B1 Radial Elastomeric Spring Arrangement
to Compensate for Hull Deflections at the Main Bearing of a Mooring Tur-
ret. FMC Corporation, 2001.
[26] United States Patent 7 063 032 B2 Upper Bearing Support Assembly for
Internal Turret. FMC Technologies Inc., 2006
[27] United States Patent 5 860 382 Turret Bearing Structure for Vessels. M.A.
Hobdy, 1999.
105

Index
asymptotes, see MA112
axisymmetric, 119
axisymmetry, 32, 33, 45, 61, 62, 67, 71,
104
bilateral symmetric, 123
bilateral symmetry, 33, 78, 86, 100, 107
checkerboarding, 53, 109
coefficient ratio, see ill-conditioning
computation time, 98
constraint
derivative, 46
load preservation, 38
relative stress, 38, 53
stress, 53
contact element, 66, 108
convergence, 98
convex approxiation, see MA112
convolution, 107
derivative
constraint, 46
convolution, 107
displacement, 47, 108
objective, 45
relative stress, 70
stress, 70, 108
topological, 45
design space, 31
design variables, 36
duality, see Lgrangian duality112
feasible, 98
Fourier-series, 79
guiding bearing, see lwer bearing112
harmonic
element, 63, 78
load, 78, 79, 82
Harwell-Boeing, 76, 117
hoop stress, see blateral symmetry112
ill-conditioning, 58, 73
jacobean, 69
KKT-conditions, 40
Lagrangian, 42
Lagrangian duality, 33, 42
lower bearing, 108
main bearing, 20, 21, 25, 26, 29, 32,
65, 99, 103
MMA, 33, 39, 75, 98
objective function, 36
optimization, see tpology optimization112
patents, 25
penalization, 46, 48
performance variable, 27
physical loads, 79
pre-existing structure, 107
pre-tension, 67, 103
primal-dual Newton method, 44
rimal-dual Newton method, 33
roller, 108
Rosebank, 63
Rothe Erde, 67, 68
106

sensitivity, 45
SIMP, 46, 98
Slater’s condition, 42
superposition, 33, 80–82
tangial deformation, see bilateral sym-
metry112
topology optimization, 30, 98
torsion, 99
upper bearing, see main bearing
virtual loads, 79
107