Automation Kiva

of 25
-
Upload
anirudh-kowtha -
Category
Documents
-
view
230 -
download
0
Transcript of Automation Kiva
-
7/27/2019 Automation Kiva
1/25
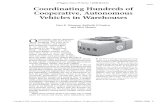
COORDINATING HUNDREDS
OF COOPERATIVE,
AUTONOMOUS VEHICLES INA WAREHOUSE
Dev Bahadur Poudel
Automation and Control Seminar
Jacobs University
Bremen
Friday, August
23, 2013
Automation and Control Seminar 1
-
7/27/2019 Automation Kiva
2/25
Structure of Presentation
Friday, August 23, 2013Automation and Control Seminar
2
Overview on Multi-Agent System
Multi Agent System in Warehouse
Kiva System in Warehouse
-
7/27/2019 Automation Kiva
3/25
Autonomous Robot
Friday, August 23, 2013Automation and Control Seminar
3
Robots that can perform desired task in
unstructured environment without human
guidance.
Have some degree of autonomy
Have control over their internal state and their
behavior
-
7/27/2019 Automation Kiva
4/25
Agents
Friday, August 23, 2013Automation and Control Seminar
4
Computer system that is capable of
independent(autonomous) action to satisfy
design objectives
Problem Solving entities
Situated in a particular environment (input
environment through sensors and act on
environment through effectors)
-
7/27/2019 Automation Kiva
5/25
Multi-Agent System
Friday, August 23, 2013Automation and Control Seminar
5
Agent Oriented Approach to solve Complex
Problem
Consist of a number of agents interacting with
each other to accomplish the goal in acommon environment
Problem are decentralized to different agents
Decomposition of Knowledge and Expertise Distributed Intelligence
-
7/27/2019 Automation Kiva
6/25
Why and Where Multi-agents
Systems?
Friday, August 23, 2013Automation and Control Seminar
6
Decentralization of Problems and Knowledge
For Complex Control Systems
Increase the productivity and decrease the
cost Reliability, Robust
Military Network-centric Operations
Search and Rescue Transportation and Logistics
Now days used in Warehouse to increase theefficiency
-
7/27/2019 Automation Kiva
7/25
Traditional Automation in
Warehouse
Friday, August 23, 2013Automation and Control Seminar
7
Pickers(human) move around the Warehouse
Fetch products and return them to packing
station
Human have to look for the order items
Order items in Conveyors
Batch Processing
Time consuming
-
7/27/2019 Automation Kiva
8/25
Modern Automation in
Warehouse
Friday, August 23, 2013Automation and Control Seminar
8
Orders item come in hand of picker like a
MAGIC!
Use of Autonomous agents
Agents search the order fetch to the human
Agents co-ordinate to achieve a system goal
Many orders can be fulfilled
Increases Productivity
Kiva System
-
7/27/2019 Automation Kiva
9/25
Kiva System
Friday, August 23, 2013Automation and Control Seminar
9
State-of-the art for modern automation in
warehouse
Founded on better approach for order fulfillment
(goods to customers) Uses Hundreds of autonomous mobile robots
Sophisticated control Software
Uses the concept of Distributed Intelligence Founded in 2003 (Mick Mountz )
Fielded in 2006
Implements Distributed Intelligence
-
7/27/2019 Automation Kiva
10/25
Resources
Friday, August 23, 2013Automation and Control Seminar
10
Inventory ( with dimensions and frequency)
Inventory Pods (pods can visit one or multiple
stations)
Bins (pods can have 1-1000 bins)
Order Pods
Parking space for pods
Robots
Picking Stations
-
7/27/2019 Automation Kiva
11/25
MAS Architecture in
Warehouse(Kiva)
Friday, August 23, 2013Automation and Control Seminar
11
Job Manager
Inventory Station Drive Unit
Agent 1
Agent 2Agent 3
-
7/27/2019 Automation Kiva
12/25
Drive Unit Agent
Friday, August 23, 2013Automation and Control Seminar
12
Mobile Robots
Fetch the Inventory pod to the picking station
Take the Order pods to the shipping station
Transport the Inventory Pod to replenishment
Path Planning
-
7/27/2019 Automation Kiva
13/25
Inventory Station Agent(ISA)
Friday, August 23, 2013Automation and Control Seminar
13
Picking stations : Workers pick items
Replenishment stations: barcodes are
scanned and appropriate pod come to the
station
Report accomplishment of its tasks.
Equipped with computer that pick lights,
barcode scanners, laser pointers used toidentify the pick and put locations
-
7/27/2019 Automation Kiva
14/25
Job Manager
Friday, August 23, 2013Automation and Control Seminar
14
Central Server System
Resource Allocation
Communicate with Warehouse Management
System
Receives customer orders that need to be
fulfilled
Assigns drives, pods, and stations to carry outthe tasks.
-
7/27/2019 Automation Kiva
15/25
Kiva Robots and Pods
Friday, August 23, 2013Automation and Control Seminar
15
-
7/27/2019 Automation Kiva
16/25
Kiva working Mechanism
Friday, August 23, 2013Automation and Control Seminar
16
JM receives orders and assign to stations to
fulfill
Robot(Drive Unit) carries the inventory pods
Inventory pods come to picking stations
Picking: Workers pick items and put in order
pod
Shipping : Order pod move for shipping afterfulfilling all the orders
Replenishment : Inventory pods go for
replenishment
-
7/27/2019 Automation Kiva
17/25
Order fetch Configuration
Friday, August 23, 2013Automation and Control Seminar
17
-
7/27/2019 Automation Kiva
18/25
Path Planning
Friday, August 23, 2013Automation and Control Seminar
18
Optimization of the path to fetch order from
storage to the station
A* Algorithm
Travelling Salesman Problem
-
7/27/2019 Automation Kiva
19/25
Resource Allocation Challenges
Friday, August 23, 2013Automation and Control Seminar
19
Objective: Optimizing the system(keep the
workers busy minimizing the robots and pods
used)
Which order to assign to which robot?
Which pod to pick up?
Where to keep the pod after order is fulfilled?
Which pod to send for replenishment?
Optimization(make all the robots and stations
busy)
-
7/27/2019 Automation Kiva
20/25
Heuristic Technique for
Optimization
Friday, August 23, 2013Automation and Control Seminar
20
Order Allocation
1.Time to fulfill the order must be minimized
2. Inventories around the station and in
queue pods must be considered
Inventory Pod Selection
1.Nearer pods
2. Multiple items to be picked in one visit
-
7/27/2019 Automation Kiva
21/25
Resource Allocation
Friday, August 23, 2013Automation and Control Seminar
21
Pod Storage Allocation:
1.Slow frequency pods kept backward
2.high frequency pods are kept nearer
Robot Allocation:
1.Pick More pods using less Robots
2.Decrease the Queue in stations
Replenishment Allocation:
1.Maximize the cubic utilization of the pods2.Bin packing Problem
3.Create faster pods and slower pods
-
7/27/2019 Automation Kiva
22/25
Advantages
Friday, August 23, 2013Automation and Control Seminar
22
Increase Productivity: double the output
Lower Cost: lower installation and operational
costs than traditional warehouse automation
systems Location free replenishment : items can be
kept in any pods
Adaptive storage: Pods are store usingheuristic
Expandability :Add inventory pods and drive
units to increase throughput during peak
season
-
7/27/2019 Automation Kiva
23/25
Challenges
Friday, August 23, 2013Automation and Control Seminar
23
To the Computer Scientist
Development of an appropriate high levelsoftware infrastructure/framework to support
the building of multi-agent systems Efficient Algorithm for Optimization
Path Planning for robots
Resource Allocation
Coordinating Robots
Dynamic, Stochastic and hence Intractable
-
7/27/2019 Automation Kiva
24/25
Kiva in Action
Friday, August 23, 2013Automation and Control Seminar
24
-
7/27/2019 Automation Kiva
25/25
Have a Nice Day!
Friday, August 23, 2013Automation and Control Seminar
25