Automatic on 2011
97
MathWorks, Inc. MATLAB&Simulink w automatyce przemyslowej © 2011 The Automaticon, 7 Kwietnia 2011
-
Upload
krzysztof-kaz -
Category
Documents
-
view
33 -
download
0
Transcript of Automatic on 2011

The
Mat
hWor
ks, I
nc.
MATLAB&Simulink w automatyce przemysłowej
© 2
011
The
Automaticon, 7 Kwietnia 2011

Witamy uczestników seminarium
Oprogramowanie Naukowo – Techniczne
� Leszek Szkudlarek - B&R� Paweł Błaszczyk – ONT
Paweł Bytnar - ONT
2
� Paweł Bytnar - ONT

Agenda
� 10.00 - 10.30 - MATLAB Simulink, jako środowisko rozwijania modelu turbiny wiatrowej - Paweł Bytnar, ONT Kraków
� 10.30- 11.15 - Sterowanie maszynami elektrycznymi z użyciem procesorów DSP w Simulinku - Paweł Błaszczyk,
3
użyciem procesorów DSP w Simulinku - Paweł Błaszczyk, ONT Kraków
� 11.15 - 11.45 - Współpraca programu MATLAB&Simulink z środowiskiem Automation Studio firmy B&R - Leszek Szkudlarek B&R Poznań

Materiały z seminarium b ędą wysłane do Państwa
� Jeśli chcą Państwo zapytać o cenę albo sposób licencjonowania, zapraszam w przerwie lub po seminarium na stoisko firmy B&R, C16/D13, HALA 1
� Proszę o pytania dotyczące produktu w czasie seminarium
4
� Proszę o pytania dotyczące produktu w czasie seminarium

Founded in 1984: MATrix LAB oratory
Headquarters:Natick, Massachusetts US
US: California, Michigan, Washington DC, Texas
Europe:
MathWorks
5
Europe:UK, France, Germany, Switzerland, Italy, Spain, the Netherlands, Sweden
Asia-Pacific:China, Korea, Australia
Worldwide training and consulting
Distributors in 25 countries
Earth’s topography on an equidistant cylindrical projection,
created with MATLAB® and Mapping Toolbox™.

Webinaria w języku polskim
www.ont.com.pl
www.matlab.pl
Tel :012 630 49 50
email : [email protected]
6
� Webinaria w języku polskim
� Organizacja szkoleń, pomoc techniczna, projekty
� Wersje próbne 15 dniowe

Nasi klienci w Polsce
� NBP� KNF � Radwar Warszawa� TRW Czestochowa� Delphi i BWI Kraków� ABB Krakow� PIAP Warszawa� Motorola Polska
7
� Motorola Polska� MTU Rzeszow� WB Electronics� Eurotech Mielec� Contur2000� EMAG Katowice� Alstom Wroclaw� Instytut Technologii Eksploatacji� Energocontrol� Woodward Niepołomice� Wszystkie uczelnie techniczne w całej Polsce

Segway LLC Delivers Innovative Transporter Using MathWorks ™ Tools
Challenge
To design, deliver, and manufacture the first electric-powered, dynamically stabilized transportation machineSolution
Use MathWorks™ tools to help design early Segway Human Transporter.
8
Use MathWorks™ tools to help design early conceptual designs and deliver a reliable, durable commercial productResults
� Development cycles accelerated� Microprocessor memory constraints met� Lifecycle design goals confirmed
“MATLAB ® is an integral part of
our design process. It allows us
to make the technical story clear
so that we all understand how the
system is operating.”
John MorrellSegway
Segway Human Transporter.
Link to user story
B&R ma sterowniki i środowisko do ich programowania
9
MATLAB , Simulink ?

1.MATLAB&Simulink – potrzeba symulacji „wirtualnego obiektu” lub środowiska pracy urz ądzenia
w
10
w
i
)(1
)()( tvL
tL
Kti
L
R
dt
di b +−−= ω
)(1
)(1
tiKJ
twKJdt
dwmf +−=

Aby unikn ąć efektów dymno -dźwiękowych
11

2. Nie strzelaj do muchy z armaty …
12

Czasami jednak drabinka, FBD, czy CFC nie wystarczy
� Wtedy trzeba się przewietrzyć albo użyć innych narzędzi, pozwalających pracować na wyższym poziomie abstrakcji
13

2. Nie strzelaj do muchy z armaty …
� MATLAB&Simulink nie jest potrzebny do wyliczenia nastaw regulatora PID
� MATLAB to ponad 30 bibliotek,TOOLBOXów, które rozszerzają jego funkcjonalność o algorytmy z logiki
14
rozszerzają jego funkcjonalność o algorytmy z logiki rozmytej, sieci neuronowych, różnych algortymówsterowania
� Simulink posiada narzędzia do analizy i optymalizacji algorytmu sterowania
� Dla automatyka MATLAB może być dobrym narzędziem do zbudowania skomplikowanego systemu sterowania

Maszyny i urz ądzenia staj ą się coraz bardziej wyrafinowane tak aby podoła ć wyższym wymagania klienta.
15
Ta złożoność przekłada si ę na coraz bardziej skomplikowane system wbudowane.

Wdrażanieaplikacji
Dostępdo danych
Analiza i wizualizacja
Możliwo ści programu MATLAB
16
Rozwijanie algorytmówi aplikacji

Simulink
Simulink jest to narzędzie służące do graficznego przedstawieniasystemu dynamicznego za pomocą schematu blokowego, modelu.
17

Zastosowania programu Simulink
WojskoElektronika
18Przemysł maszynowyProcesy przemysłowe
Telekomunikacja Motoryzacja

To jest proste …
19
>> plcdemo_simple_subsystem
Stateflowplcdemo_stateflow_controller.mdl

Podsumowanie
� Środowisko MATLAB&Simulink jest środowiskiem w którym możemy napisać algorytm i przeprowadzić symulacj ę
� Może być użyte gdy zaistnieje potrzeba stworzenia modelu obiektu sterowanego ze względu na koszty i czas
20
obiektu sterowanego ze względu na koszty i czas
� Jest to wczesna weryfikacja naszego pomysłu (programowy prototyp)
� Nie jest przypisane do konkretnej architektury sprzętowej
� Nie jest używane tylko na uczelniach …

The
Mat
hWor
ks, I
nc.
Model Based -Design
© 2
011
The

Pytania :
� Czy używają Państwo symulacji ?
� Jak tworzą Państwo swoje algorytmy sterowania ?
22
� Jak testują Państwo swoje algorytmy sterowania ?
� Jak programują Państwo algorytmy sterowania ?

DEMO: Simulink for Designing Control Systems for Wind Turbines
BladesWind
23
GridTower
Geartrain GeneratorHub
Nacelle

Projektowanie systemu sterowania
Obiekt, środowisko
+-
System
24
Sterownik, aplikacja
Systemwbudowany
24

Problemy w tradycyjnym podej ściu
SPECYFIKACJA
BADANIA WYMAGANIA
Dokumenty tekstowe- Utrudniaj ą przepływ
informacji
2525
Embedded Software
C/C++
Control Algorithms
ControlDesign
Mechanical Components
MCAD/MCAE
Electrical Components
EDA
Elementy elektryczne
EDA
INTEGRACJ A I TESTOWANIE
Elementy mechaniczne
MCAD/MCAE
PROJEKT i IMPLEMENTACJA
Algorytmy sterowania
Projektowanie sterowania
Systemy wbudowane
C/C++
Prototypy fizyczne- Czasochłonne i kosztowne
Ręczne kodowanie- Każdy robi inne bł ędy
Testowanie- O ile si ę je przeprowadza
to znajdowane s ą za późno

ExecutableSpecificationsWykonywalna Specyfikacja
Zalety podej ścia Model-Based DesignWykonywalna specyfikacja-jednoznaczna-spójna
26
Designwith
Simulation
ContinuousTest and
Verification
AutomaticCode Generation
ModelsProjektowanie
i symulacjaWeryfikacja i Walidacja
Automatyczna Generacja Kodu
ModelsTestowanie- wcześniejsze wykrywanie bł ędów
Symulacja-brak fizycznych protypów-szybkie sprawdzenie ró żnych pomysłów i ich weryfikacja
Automatyczna Generacja Kodu-minimalizuje powstanie bł ędów
26

TE
ST
Y&
Model-Based Design - budowa systemu wbudowanego
PROJEKT
MODEL OTOCZENIA (ŚRODOWISKA)
ALGORYTMY STEROWANIA
MECHANICZNE ELEKTRYCZNE
Automatyczna generacja kodu z symulacyjnego modelu do bezpośredniej implementacji na docelowe urządzenie:
• Mikrokontrolery• FPGA• PLC IDE
BADANIA WYMAGANIA
27
INTEGRACJA
IMPLEMENTACJA&
WE
RY
FIK
AC
JA
LOGIKA NADZORUJ ĄCA
MCU DSP FPGA ASIC
Structured TextVHDL, VerilogC, C++
PLC,PAC

Model-Based Design dla systemów PLC (tylko ST)
Simulink, Stateflow, Embedded MATLAB
Simulink Verification & Validation
WYMAGANIA
TE
ST
Y&
PROJEKT
MODEL OTOCZENIA (ŚRODOWISKA)
ALGORYTMY STEROWANIA
MECHANICZNE ELEKTRYCZNE
BADANIA WYMAGANIA
28
Simulink PLC Coder
System model
PLC IDE (e.g., RSLogix)
PLC/PAC
High Speed
Bus
Embedded MATLAB
Simulink PLC Coder
Control Algorithms
PLC IDE(e.g. RSLogix)
IEC 61131 Structured Text
PLC/PAC
INTEGRACJA
IMPLEMENTACJA&
WE
RY
FIK
AC
JA
LOGIKA NADZORUJ ĄCA
MCU DSP FPGA ASIC
Structured TextVHDL, VerilogC, C++
PLC, PAC
TE
ST
Y&
PROJEKT
MODEL OTOCZENIA (ŚRODOWISKA)
ALGORYTMY STEROWANIA
MECHANICZNE ELEKTRYCZNE
BADANIA WYMAGANIA
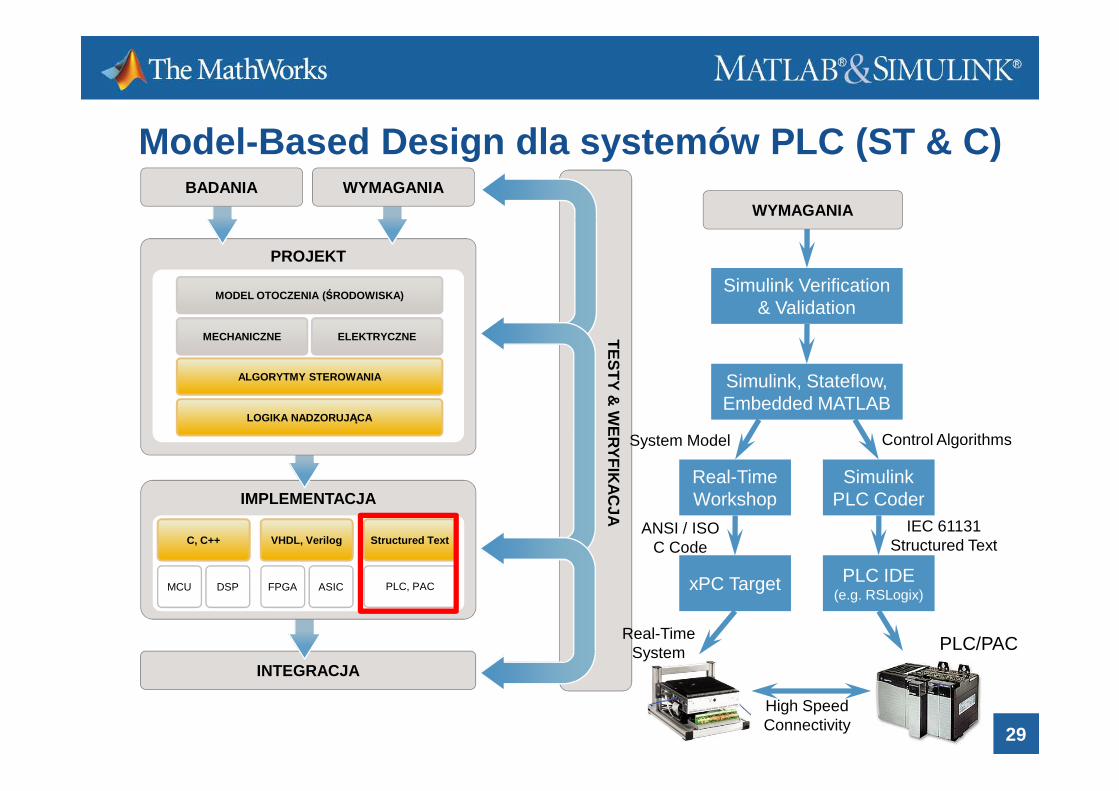
Model-Based Design dla systemów PLC (ST & C)
Simulink, Stateflow, Embedded MATLAB
Simulink Verification & Validation
WYMAGANIA
29
INTEGRACJA
IMPLEMENTACJA&
WE
RY
FIK
AC
JA
LOGIKA NADZORUJ ĄCA
MCU DSP FPGA ASIC
Structured TextVHDL, VerilogC, C++
PLC, PAC
Real-Time Workshop
Simulink PLC Coder
System Model Control Algorithms
xPC Target PLC IDE(e.g. RSLogix)
ANSI / ISO C Code
IEC 61131 Structured Text
High SpeedConnectivity
PLC/PACReal-Time
System
Embedded MATLAB

TE
ST
Y&
PROJEKT
MODEL OTOCZENIA (ŚRODOWISKA)
ALGORYTMY STEROWANIA
MECHANICZNE ELEKTRYCZNE
BADANIA WYMAGANIA
Model-Based Design dla systemów PLC B&R (C )
Simulink, Stateflow, Embedded MATLAB
Simulink Verification & Validation
WYMAGANIA
30
INTEGRACJA
IMPLEMENTACJA&
WE
RY
FIK
AC
JA
LOGIKA NADZORUJ ĄCA
MCU DSP FPGA ASIC
Structured TextVHDL, VerilogC, C++
PLC, PAC
Real-Time Workshop
System Model Control Algorithms
ANSI / ISO C Code
Embedded MATLAB

Wsparcie środowisk IDE
Simulink PLC Coder wspiera następujące środowiska :� 3S-Smart Software Solutions CoDeSys� B&R Automation Studio� Beckhoff TwinCAT
31
Beckhoff TwinCAT� Rockwell Automation RSlogix 5000 � PLCopen XML Format� KW-Software MULTIPROG®
� Siemens® SIMATIC® STEP® 7 IDE
Więcej informacji na stronie producenta :http://www.mathworks.com/products/sl-plc-coder/supportedio.html

32Alstom doubled SLOC, with No Errors, and Certified
http://www.mathworks.com/mason/tag/proxy.html?dataid=6352&fileid=26424

Podsumowanie
Simulink PLC Coder
� Generuje kod ST zgodny znorma IEC 61131-3
� Wspiera wiele różnych
33
� Wspiera wiele różnych środowisk, B&R, RSLogix, itd.
� Wsparcie dla procesu weryfikacji (generacja scenariuszy testowych)
http://www.mathworks.com/products/sl-plc-coder/
TÜV SÜD Certified Simulink PLC Coder to IEC 61508-3 and IEC 61511-1

The
Mat
hWor
ks, I
nc.
R2011a
© 2
011
The
Klienci zwykle przepisuj ą swoje pliki napisane w MATLABie na język C
35
napisane w MATLABie na język C

Nie wszyscy u żytkownicy MATLABachc ą używać Simulinka
36
chc ą używać Simulinka

Nowe produkty do tworzenia systemów wbudowanych i generacji koduMATLAB Coder
Automatyczna generacja kodu C z MATLAB’a
Simulink Coder Jeden moduł do generacji kodu C z Simulink’a i Stateflow
37
Jeden moduł do generacji kodu C z Simulink’a i Stateflow
Embedded Coder Jeden moduł do generacji kodu na systemy wbudowane
System ToolboxesAlgorytmy do tworzenia obiektów systemów (przetwarzanie sygnałów i systemy wizyjne)

Generacja kodu C z programu MATLABDo wczoraj jedyna scie żka prowadziła przez Simulink’a
� To podejście rozwijania aplikacji jest dla osób, które zaadaptowały Simulinka i MBD
Brakuje !
MATLAB
Real
Workshop
Simulink
38
MBD
C Code
Brakuje !!
Real-Tim
e W
orkshop
EmbeddedMATLAB
MAT
LAB
C
oder
R2011a: MATLAB Coder
� Niezależny (od architektury sprzętowej) kod C bezpośrednio z algorytmów MATLAB’a
MATLAB
39
MAT
LAB
C
oder
� Nie wymaga Simulink’a
� Mniejszy kosztyC Code

Unify Simulink and Stateflow Code Generation
� Separate coder limits Stateflow adoption
MATLAB Simulink Stateflow
Real
Workshop
StateflowC
oder
40
� Few people buy Stateflow Coder without Real-Time Workshop
Real-Tim
e W
orkshop
StateflowC
oderC Code
R2011a: Simulink Coder
� Jeden moduł do generacji kodu dla Simulink’ai StateflowS
imulink
Coder
MAT
LAB
Coder
MATLABSimulink
i Stateflow
41
� Wymaga MATLAB Coder
� Automatyczna generacja przenośnego i niezależnego sprzętowo kodu C do RP/HIL
Sim
ulinkC
oder
MAT
LAB
Coder
C Code

Połączenie narz ędzi do generacji kodu dla systemów wbudowanych
� Mylące opcje generacji kodu oraz zależności produktoweMATLAB Simulink
Sim
ulinkC
oder
MAT
LAB
Coder
Simulinkand Stateflow
42
Embedded CPortable C
Embedded IDE LinksEmbedded Targets
RT
W
Em
bededC
oder
Sim
ulinkC
oder
MAT
LAB
Coder

R2011a: Embedded Coder
� Generacja natywnego kodu C– Optymalizacja kodu– integracja w środowisku
programistycznym IDE
Sim
ulinkC
oder
MAT
LAB
Coder
MATLABSimulink
and Stateflow
43
programistycznym IDE
� Wymaga MATLAB Coder– Pracuje z Simulink Coder
� Simulink Coder z Embedded Coder są zalecane do generacji kodu produkcyjnego
Sim
ulinkC
oder
MAT
LAB
Coder
Embedded CPortable C
Em
bedded C
oder

Więcej informacji
� Strona producenta - www.mathworks.com� Osoby posiadające RTW i posiadające
subskrypcję mogą ściągnąć MATLAB Coder� Zapraszamy do skorzystania z wersji
44
� Zapraszamy do skorzystania z wersji testowych, TRIAL - 15 dni

Forum MATLAB.PL
45

MATLAB Central
� Wymiana plików dla użytkowników programu MATLAB i Simulink
� Grupy dyskusyjne
46
� Grupy dyskusyjne� comp.soft-sys.matlab� MATLAB Newsreader
� Blogi
www.mathworks.com/matlabcentral

Więcej informacji …� Simulink - http://www.mathworks.com/products/simulink/
– Dema– Nagrane webinaria– White papers– User stories– Pełna dokumentacja produktu
47
– Pełna dokumentacja produktu http://www.mathworks.com/access/helpdesk/help/toolbox/simulink/

Dalsze kroki…
� 15 dniowa wersja testowa na sprawdzenie przydatności programu u Państwa w firmie
� Zakup oprogramowania
48
� Szkolenia, szkolenia cykliczne już od 500 zł za osoba/dzień
� Program pilotażowy, podczas 2-3 dniowej wizyty u Państwa, pomagamy wdrożyć to oprogramowanie
� Zlecenie budowy modelu, symulacji, optymalizacji
� Proszę o kontakt, 012 630 49 52 lub [email protected]

Webinaria w języku polskim
www.ont.com.pl
www.matlab.pl
Tel :012 630 49 50
email : [email protected]
49
� Webinaria w języku polskim
� Organizacja szkoleń, pomoctechniczna, realizacja projektów
� Wersje próbne 15 dniowe
® ®
The
Mat
hWor
ks, I
nc.
® ®
Testowanie i weryfikacja w czasie rzeczywistym, sterowanie wektorowe silnikiem PMSM za pomoc ą TI
© 2
010
The
Mat
hWor
ks, I
nc.
Paweł Błaszczyk, Paweł Bytnar

® ®® ®
ABB Accelerates Application Control Software Development for Power Electronic Controller
Challenge
To adopt a more efficient development process using tools that accelerate the design of new application software for a high-powered electronic controller for power convertersSolution
Use MathWorks™ tools to design and validate
AC 800PEC controller.
22
“Our system engineers can
program, simulate, and verify
the AC 800PEC controller’s
regulation software very
rapidly in MATLAB ® and
Simulink®.”
Fritz WittwerABB
Use MathWorks™ tools to design and validate their control algorithms while streamlining the application software development process for the controllerResults
� Development times and costs reduced� Development process improved� Highly accurate code generated
Link to user story

® ®® ®
Texas Instruments Streamlines R&D with Simulink ® and DSP Tools
Challenge
To shorten product cycles by accelerating the flow of real-time DSP algorithms from product designSolution
Use an integrated set of DSP design tools from The MathWorks that allows algorithm developers,
A DSP chip from Texas Instruments.
33
The MathWorks that allows algorithm developers, system engineers, and software engineers to use a common high-level model to coordinate their workResults
� Accelerated design� Efficient time allocation� Reduced overhead
“We see the future of advanced DSP
design in development tools like those
from The MathWorks.”
Dr. Randy ColeTexas Instruments DSP SolutionsResearch & Development Center
Link to user story

Praca z SimPowerSystems
� Pozwala na :➼ Budowa i symulacja systemów
elektrycznych
SimPowerSystems jest narz ędziem do modelowania części sieci elektroenergetycznych
4
elektrycznych➼ Symulacja synchronicznych i
asynchronicznych napędów elektrycznych
➼ Przeprowadzenie „standardowych” analiz układu elektrycznego
➼ Zbudowanie algorytmu do sterowania
➼ Generacja kodu dla poprawienia szybkości symulacji

® ®® ®
Schemat blokowy systemu
55

® ®® ®
Etap 1 - Budowa modelu nap ęduWykorzystanie SimPowerSystems
� Układ składa się ze źródła zasilania, falownika i silnika PMSM� Dodatkowo utworzono punkt pomiaru napięć i prądów
66

® ®® ®
Falownik
77
� Przy stanie „0” faza jest zwarta do (-), przy „1” jest zwarta do (+)
� Do płynnego sterowania należy wykorzystać PWM
® ®® ®
Etap 2 – Sterowanie dla modelu symulacyjnego
� Mając dane wartości zadane prądów i kąt pomiędzy stojanem i wirnikiem wykonuje się odwrotną transformację Park’a
� Dla zadanych wartości ua i ub generowane jest wypełnienie PWM zapewniające sinusoidalne prądy stojana
88
PWM zapewniające sinusoidalne prądy stojana� Kąt do transformacji jest generowany przez układ (brak
sprzężenia od położenia i prędkości)� Na podstawie wypełnienia generowany jest sygnał 0/1 do
przesłania na tranzystory – w rzeczywistym układzie zadane wartości są bezpośrednio przesyłane do modułu PWM

® ®® ®
99
Wypełnienie PWM, a pr ądy stojana

® ®® ®
Schemat układu, demo
1010

® ®® ®
Obliczanie pr ądów id, iq
� Na podstawie prądu w dwóch uzwojeniach wyznaczane są
1111
aktualne prądy id i iq� Po odpowiednim przeskalowaniu wykonywana jest
transformacja Clarke’a� Przy wykorzystaniu informacji o położeniu kątowym
wykonywana jest transformacja Parka� W wyniku otrzymuje się wartości prądów w osiach d i q

® ®® ®
Sprzężenie zwrotne od pr ądów i poło żenia
� Zmierzone prądy można odnieść do wartości zadanych� Do symulacji można użyć kąta wirnika z modelu� W rzeczywistym obiekcie należy zastosować regulatory PI dla
prądów id i iq
1212

® ®® ®
Sprzężenie od pr ędkości
� Uchyb prędkości podawany jest na regulator PI, który generuje nową wartość zadaną dla składowej prądu odpowiedzialnej za generację momentu elektrycznego
1313

® ®® ®
Etap 3 - Eliminacja sprz ężenia od poło żenia wirnika
� Położenie kątowe wirnika można estymować na podstawie zmierzonych prądów stojana
� Prostsza metoda nie wymaga znajomości fizycznego położenia wirnika
1414
wirnika

® ®® ®
Software -in-the-Loop Simulation
Walidacja wygenerowanego z modelu kodu lub zaimportow anego za pomoc ą „Wrappera” do Simulinka przez symulacj ę kodu w p ętli sprz ężenia zwrotnego w jednym spójnym środowisku.
V
1515
S-function wrapper, który pozwala
na zaimportowanie napisanego
wcześniej kodu do Simulinka.

® ®® ®
Processor-in -the-Loop Cosimulation
Walidacja wygenerowanego programu przez jego urucho mienie na sprz ęcie, płycie uruchomieniowej w oparciu o dane z Simu linka.
V
1616
• exercises object code• stack profiling• code coverage• execution profiling

® ®® ®
Porównanie funkcjonalno ści modelu z wykonaniem na procesorze. V
1717
Pairwise
equality
check

® ®® ®
Targeting TI C2000 DSPs
MathWorks Modeling Environment
MATLAB® Simulink® Stateflow®
1818
• Embedded IDE Link (CCS Adaptor)• Real Time Workshop Embedded Coder• Target Support Package (for TC2)
Compile& Link
C/ASMCode
Texas InstrumentsCode Composer Studio™
Environment
Download
Debug
TI C2000DSP

® ®® ®
Etap 4 – implementacja na DSP
� Położenie symulowane generacją rampy� Prąd w osi d zależny od wartości prędkości zadanej� Wykorzystane bloczki:
– Konfiguracja płytki Piccollo
1919
– Konfiguracja płytki Piccollo– ePWM– ADC– Digital Output (aktywacja mostka H)

® ®® ®
Zestaw ewaluacyjny
Procesor F28035Piccolo
Podwójnymostek H – DRV8402 IPM
2020
Podwójnymostek H – DRV8402 IPM

® ®® ®
Etap 5 – integracja programu na procesorze z GUI
� Do współpracy pomiędzy Matlabem a Code Composer należy użyć bloków RTDX
� Na potrzeby kontroli stworzono aplikację graficzną zawierającą:– Slider do nastaw
2121
– Slider do nastaw prędkości
– Pole wykresu

® ®® ®
Program współpracuj ący z GUI
2222

® ®® ®
Hardware -in-the-Loop SimulationEmulowanie środowiska, rzeczywistej maszyny przez symulowanie na komputerze z systemem czasu rzeczywistego i płyt ą steruj ąca na której uruchomiony jest algorytm steruj ący.
V
2323
~
~
xPC-Target

® ®® ®
Dalsze kroki…
� 15 dniowa wersja testowa na sprawdzenie przydatności programu u Państwa w firmie
� Zakup oprogramowania
2424
� Szkolenia, szkolenia cykliczne już od 500 zł za osoba/dzień
� Program pilotażowy, podczas 2-3 dniowej wizyty u Państwa, pomagamy wdrożyć to oprogramowanie
� Zlecenie budowy modelu, symulacji, optymalizacji
� Proszę o kontakt, 012 630 49 52 lub [email protected]

® ®® ®
Webinaria w języku polskim
www.ont.com.pl
www.matlab.pl
Tel :012 630 49 50
email : [email protected]
2525
� Webinaria w języku polskim
� Organizacja szkoleń, pomoctechniczna, realizacja projektów
� Wersje próbne 15 dniowe

B&R Automation Studio Target for Simulink®
Automatyczne generowanie kodu programu sterownika PLC
Prelegent:
Leszek Szkudlarek – B&R Automatyka Przemysłowa Sp. z o.o.

Cel
Coraz większe wymagania w przemysłowej automatyzacji
Konieczność wcześniejszej symulacji procesu
Wyrafinowane algorytmy sterowania
Wymagane zaawansowane narzędzia
Wykorzystanie wysoko specjalistycznej wiedzy
Koncentracja na kompetencjach
Automatyczne generowanie kodu
Znaczna redukcja czasu
wdrażania projektu
Minimalizacja ryzyka wystąpienia
błędu w kodzie
Redukcja kosztów

The MathWorks
MATLAB i Simulink
Potężne środowisko obliczeniowe
Rozpowszechnione na całym świecie
Real-Time Workshop i Real-Time Workshop Embedded Coder
Automatyczne generowanie kodu z modeli Simulinka
Sprawdzone przez wiele lat
Współpraca B&R z The MathWorks
Oficjalny partner
Strategiczna współpraca techniczna

Szybkie prototypowanie (ang. Rapid Prototyping)
Szybka i elastyczna implementacja wyrafinowanych modeli
Oszczędność czasu i pieniędzy
Eliminacja błędów w kodzie programu

Symulacja obiektu na sprzęcie (ang. Hardware-in-the-Loop)
Testowanie bez ryzyka
Emulacja krytycznych komponentów obiektu (w czasie rzeczywistym)

B&R Toolbox dla Simulink
B&R Toolbox
B&R Config
B&R Input i Output
B&R Parameter

Debugowanie
Automation Studio
Watch
Trace
Profiler
MATLAB/Simulink
Workspace
Wykresy
Analiza danych
Wymagania
B&R Automation Studio 3
B&R Automation Runtime system
PLC, IPC lub symulator
MATLAB Release 2007b lub wyższy
MATLAB®
Simulink®
Real-Time Workshop®
Real-Time Workshop® Embedded Coder™ (opcjonalnie)
Stateflow® (opcjonalnie)
Blockset’y Simulink® (opcjonalnie)

Integracja i przebieg pracy
Sterownik
Projekt Automation
Studio
Model w Simulinku
Standardowe taski
100% kompatybilne
Kod
źródłowy

Krok 1: Utworzenie projektu Automation Studio

Krok 2: Utworzenie modelu Simulink

Krok 3: Automatyczne generowanie kodu programu

Krok 4: Integracja w systemie sterowania

Referencje
GE Jenbacher
Producent silników gazowych i generatorów
http://www.jenbacher.com/
AST for Simulink
Regulatory silników na biomasę

Referencje
AMST Systemtechnik
Producent cywilnych i wojskowych
urządzeń symulacyjnych
http://www.amst.co.at
AST for Simulink
Sterowanie w pętli otwartej i zamkniętej
w kabinie hiperbarycznej pilotów

Referencje
LENZING AG
Produkcji włókien celulozowych
http://www.lenzing.com/
AST for Simulink
Symulacja i optymalizacja procesu
przed wdrożeniem nowej instalacji

Referencje
Zachodniopomorski Uniwersytet Technologiczny
www.we.zut.edu.pl
Prototyp obrabiarkowego zespołu posuwowego z napędami liniowymi w
układzie CNC o otwartej architekturze
AST for Simulink
Algorytmy obliczania korekt pracy obrabiarki

Demo: Odwrócone wahadło

Demo: Airball

Wsparcie
Pełna integracja w MATLAB / Simulink
Łatwa instalacja
Training module TM140 - B&R Automation Studio Target for Simulink®
Dokumentacja
Samouczek
Przykłady
TM140

Internet

©2002 B&R
Your worldwide automation partner
![[RuPy 2011] Automatic Acceptance Tests in Ruby](https://static.fdocuments.in/doc/165x107/556a53e8d8b42a7a138b493c/rupy-2011-automatic-acceptance-tests-in-ruby.jpg)