Automatic Control Systems -Lecture Note...
25
1/25 Automatic Control Systems Automatic Control Systems -Lecture Note 3- Mathematical Foundation -1
Transcript of Automatic Control Systems -Lecture Note...

1/25
Automatic Control Systems
Automatic Control Systems -Lecture Note 3-
Mathematical Foundation -1

2/25
Automatic Control Systems
Introduction
Mathematical model to analyze and control a complicated
dynamic system
Differential equation(DE)
Laplace transform can be used to solve linear differential
equation (LDE)
□ Introduction

3/25
Automatic Control Systems
Introduction
Mathematics
for
control system design
& analysis
Laplace Transform
Complex Variable Analysis
Differential Equation
Transfer Function Concept
Matrix Theory

4/25
Automatic Control Systems
Introduction
Approach to dynamic system problems
1. Identify target system and its components
2. Find its mathematical model along with assumptions needed
3. Earn and confirm its corresponding DE
4. Solve the DE for its output variable
5. Check the solution together with its assumptions
6. Review the model designed

5/25
Automatic Control Systems
DEs and Analogous Systems
Analogous Systems
- mathematical analogy with difference in physical properties
(Similar transfer function/DE)
- have the same form of solutions
- equivalent response to the same input
- a complex mechanical system can be simulated by using
the same type of analog/digital electric system model

6/25
Automatic Control Systems
DEs and Analogous Systems
Electrical vs Mechanical Systems
i) Analogy : force-voltage, mass-induction coil

7/25
Automatic Control Systems
DEs and Analogous Systems
o Serial mass-spring-damper (m-k-b) system dynamics
o Serial RLC circuit model
pkxdt
dxb
dt
xdm
2
2
2
2
1
1
diL Ri idt e
dt C
d q dqL R q e
dt dt C
8/25
Automatic Control Systems
DEs and Analogous Systems
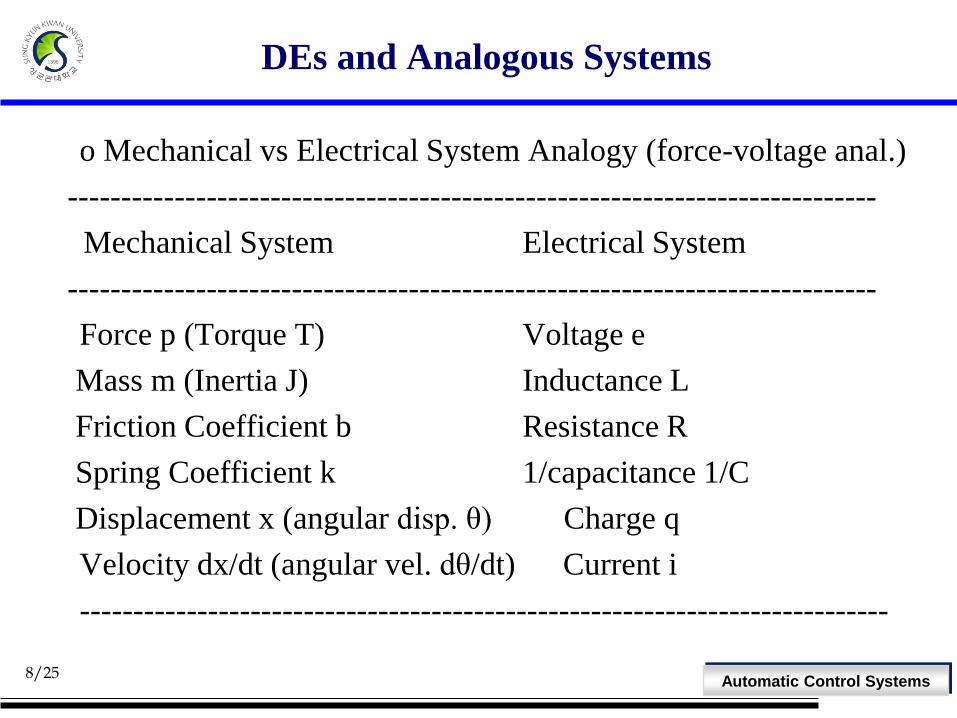
o Mechanical vs Electrical System Analogy (force-voltage anal.)
----------------------------------------------------------------------------
Mechanical System Electrical System
----------------------------------------------------------------------------
Force p (Torque T) Voltage e
Mass m (Inertia J) Inductance L
Friction Coefficient b Resistance R
Spring Coefficient k 1/capacitance 1/C
Displacement x (angular disp. θ) Charge q
Velocity dx/dt (angular vel. dθ/dt) Current i
----------------------------------------------------------------------------

9/25
Automatic Control Systems
DEs and Analogous Systems
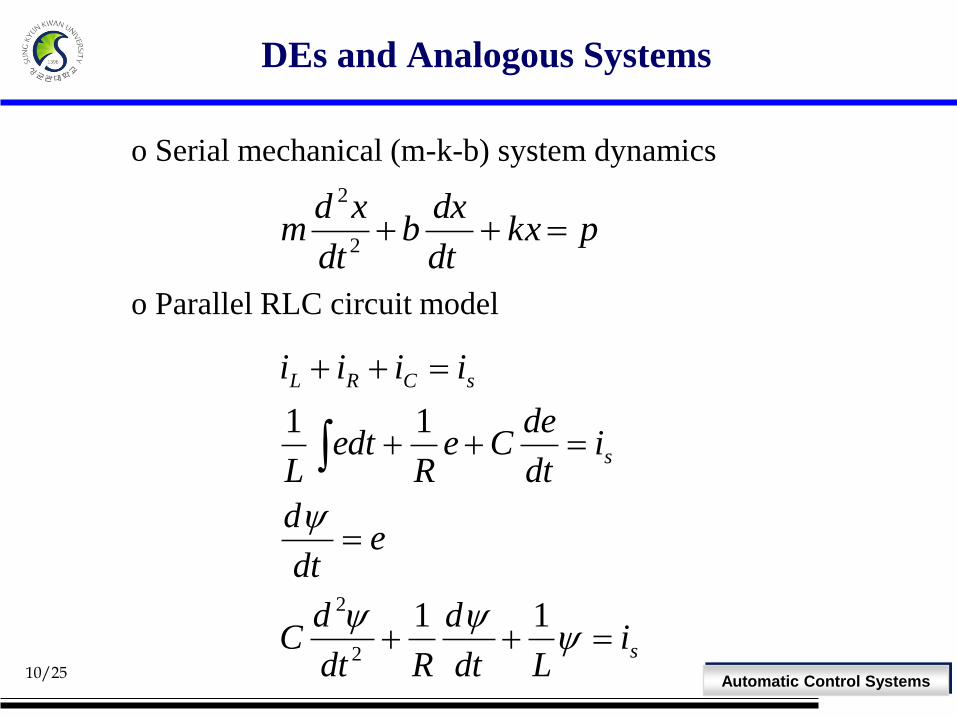
ii) Analogy : force-current & mass-capacitor
10/25
Automatic Control Systems
DEs and Analogous Systems
o Serial mechanical (m-k-b) system dynamics
o Parallel RLC circuit model
pkxdt
dxb
dt
xdm
2
2
s
s
sCRL
iLdt
d
Rdt
dC
edt
d
idt
deCe
Redt
L
iiii
11
11
2
2

11/25
Automatic Control Systems
DEs and Analogous Systems
o Mechanical vs Electrical System Analogy (force-current analogy)
----------------------------------------------------------------------------
Mechanical system Electrical system
----------------------------------------------------------------------------
force p (torque T) current i
mass m (inertia J) capacitance C
friction coefficient b 1/resistance 1/R
spring coefficient k 1/inductance 1/L
displacement x (angular disp. θ) magnetic flux Ψ
velocity dx/dt (angular vel. dθ/dt) voltage e
----------------------------------------------------------------------------
o The mathematical models of fluid, thermal, and mechanical systems are equivalent to electrical circuit model in that analogy exists in between their parameters.

12/25
Automatic Control Systems
Linear Approximation of Physical System
Nonlinear function z=f(x) can be linearized at around
the operating point P(x0,z0)
Taylor series is used for linearization
identify the corresponding Taylor series expansion
find the linearized form of function f(x)

13/25
Automatic Control Systems
Linear Approximation of Physical System
Example : a reservoir water control system
/ Q K H R dH dQ 물의흐름이 이고 저항이 일때
Fig. (a) Liquid-level system: (b) Head versus flow rate curve.
In flow : Resistance :

14/25
Automatic Control Systems
Linear Approximation of Physical System
1/ 2 1/ 21( ) ( )
2 2
2 2 2
/
2 ,
( ) /
KdQ d K H d KH K H dH dH
H
dH H H H h
dQ K Q qQ H
h HP R
q Q
Q Q H H R
점에서의기울기= Slope at P :

15/25
Automatic Control Systems
Laplace Transform
Foundation of Laplace transform was set by Laplace (1749-1827)
and its complete system was established by Heaviside (1850-
1925)
Can be used in solving LODE(linear ordinary differential
equation)
A complete solution of DE can be obtained for initial condition
and external input simultaneously
Can be used in obtaining the TF(transfer function) of LTI(linear
time invariant) system
A DE is converted into an AE(algebraic equation)
Differential eq algebraic eqL

16/25
Automatic Control Systems
Laplace Transform
Convolution integral algebraic multiplication
Definition
0( ) ( ) ( ) , stf t F s f t e dt s j
L
0( ) { ( )} ( ) , { }st
cF s f t f t e dt s R
L R
or
; unidirectional Laplace transform of piecewise continuous function f(t)
; s is complex variable, R{s} real part of s, Rc region of convergence
<Note> 1. Conversion of variables : 1/time = Hz 2. Laplace domain with complex s variable includes frequency domain of imaginary axis
17/25
Automatic Control Systems
Laplace Transform
Note 1 : Existence condition of Laplace transform
|F(s)|<∞ for all t (absolute integration possible)
Note 2 :
0 0 0
0
| ( ) | ( ) ( ) ( )
( ) , ( )
st st t
t
F s f t e dt f t e dt f t e dt
if f t e dt then F s exists
0
0
( ) ( ) ( )
-Fourier Transform
F( ) exist if ( )
j tf t F f t e dt
f t dt
F
( ), ( )step Ftn
transform transformramp Ftn
※ F L
18/25
Automatic Control Systems
Laplace Transform
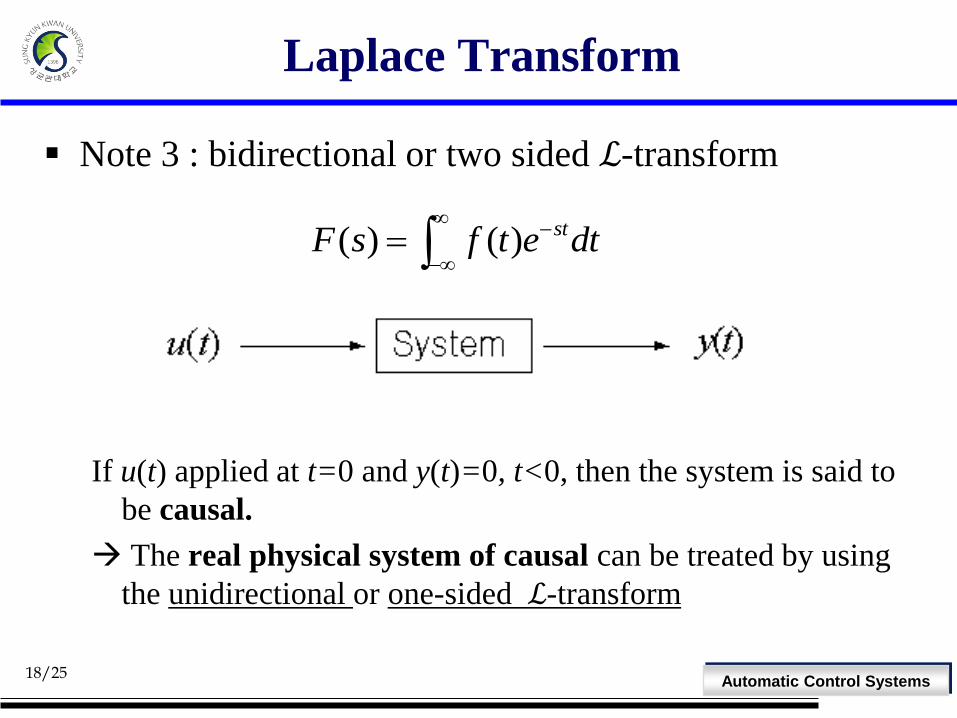
Note 3 : bidirectional or two sided ℒ-transform
If u(t) applied at t=0 and y(t)=0, t<0, then the system is said to
be causal.
The real physical system of causal can be treated by using
the unidirectional or one-sided ℒ-transform
( ) ( ) stF s f t e dt

19/25
Automatic Control Systems
Laplace Transform
Note 4 : another notation
0 0
-
( ) ( ) , ( ) ( )
( ) has an impulse at 0 ( ) ( )
otherwise, ( ) ( )
st stF s f t e dt F s f t e dt
f t t F s F s
F s F s

20/25
Automatic Control Systems
Laplace Transform
【Example】 unit-step function of constant signal
t
us(t)
1
0
0, 0( )
1, 0s
tu t
t
<Fig> unit-step function

21/25
Automatic Control Systems
Laplace Transform
Sol.)
O Existence condition?
0 0
0
0
( ) { ( )} ( ) 1
1 1[ ]
1, { } 0
st st
s s s
st
U s u t u t e dt e dt
e e es s
ss
L
R
( )
0 0
0
0
( ) ( )
( )
1 , 0
st j t
s s
t
s
t
u t e dt u t e dt
u t e dt
e dt for

22/25
Automatic Control Systems
Laplace Transform
【Example】 exponential function
Sol.)
0, 0( )
, 0at
tf t
ce t
0 0
( ) ( )
00
( ) { ( )} ( )
, { }
st at st
s a t s a t
F s f t f t e dt ce e dt
cce dt e
s a
cs a
s a
L
R

23/25
Automatic Control Systems
Laplace Transform
【Example】
【Example】
Sol.)
2
0, 0( )
, 0t t
tf t
e e t
1 1 (2 3)( )
1 2 ( 1)( 2)
sF s
s s s s
2 2
2 2
sin ,cos ?
1 1 1 1cos ( )
2 2
sin
j t j t
t t
st e e
s j s j s
ts
도 똑같은 방법으로 계산하면, 을 얻을 수 있음
L
L
can be transformed into

24/25
Automatic Control Systems
Laplace Transform
【Example】 delta function or impulse function
Sol.)
1, 0( ) ( )
0, . .
tf t t
o w
0( ) ( ) 1stF s t e dt
; identify the sifting property

25/25
Automatic Control Systems
Inverse Laplace Transform
; theoretic expression rather than practical
1
( ) ( )f t F s
L
L
1 1( ) [ ( )] ( )
2
c jst
c jf t F s F s e ds
j
L
□ Inverse Laplace Transform