Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks

of 10
-
Upload
poowadol-niyomka -
Category
Documents
-
view
223 -
download
0
Transcript of Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
1/10
First International Symposium on Fishing Vessel Energy Efficiency
E-Fishing, Vigo, Spain, May 2010
Automated Marine Propeller Design
Combining Hydrodynamics Models and Neural Networks
D. Calcagni1, F. Salvatore1, G. Bernardini2, M. Miozzi1
1 Italian Ship Model Basin (INSEAN), Rome, Italy
2 University Roma Tre, Rome, Italy
AbstractAn automated computational methodology for
the preliminary design of marine propellers is presented.
A Neural Network architecture is developed to describe
the performance of propeller models from a virtually-
generated systematic series. Propeller performance pre-
dictions are based on a propeller hydrodynamics model
based on a inviscid-flow model. Next, propeller geometry
optimization is investigated through a Genetic Algorithm
formulation. The structure of the resulting propeller de-
sign environment is illustrated and Neural Network, opti-
mization models are validated through comparisons with
existing experimental data and results from alternative
approaches. Numerical applications to a notional design
excercise addressing a propeller retrofit study for an aged
fishing vessel are also presented.
Marine Propulsion; Ducted Propellers; Neural Networks;
Numerical Optimization (key words)
I. INTRODUCTION
The quest for reducing operating costs and the increasing
awareness of environmental issues related to fuel consump-
tion and NOx emissions raise pressing demands to improve
the energetic efficiency of vessels. The propulsion system
is among the most important factors contributing to deter-
mine vessel performance, and hence consistent efficiency im-
provements are expected from a successful design of propul-
sion components.Dealing with large transport ships, enhanced design tech-
niques taking advantage of state-of-the-art experimental and
computational techniques can be applied in view of the large
investments shipowners can afford for that kind of vessels.
This is not the case with smaller vessels like fishing boats
where budget available for design is typically very limited
and standard, sometimes obsolete, analysis and prediction
approaches are used.
A viable strategy to achieve efficiency improvements for
fishing boats is to develop fast and automated modelling
techniques to rapidly explore propulsion retrofitting solu-
tions as well as to design new vessels compliant to more and
more stringent regulations.
In the present paper, a propeller design environment com-
bining multi-disciplinary models is described. Specifically,
three different tools are integrated: (i) propeller hydrody-
namics modelling through robust techniques, (ii) virtually-
generated systematic propeller series processing, and (iii) au-
tomated optimal geometry refinement. Proposed modelling
and analysis tools are described in the following sections and
applications to sample design problems are presented.
Computational hydrodynamics modelling is based on an in-
viscid flow approach developed over the last decade and ex-
tensively validated for marine propeller flow studies. This
approach provides fast and robust performance predictionsonce propeller geometry and operating conditions are de-
fined. Applications of this methodology to both open and
ducted propellers are presented.
Next, a procedure to identify general relationships between
propeller performances and geometry/operating conditions
is developed by using an Artificial Neural Network (ANN)
model. Combining computational hydrodynamics and ANN
models, a virtual systematic propeller series is created and
new design configurations are found through fast automated
procedures. The capability of the proposed ANN model to
describe a whole propeller series is demonstrated by consid-
ering the Wageningen B-Series for open propellers as a ref-
erence case. Finally, an optimal propeller design excercise is
proposed, in which the computational hydrodynamics/ANN
model is interfaced to a numerical optimization code based
on a Genetic Algorithm methodology.
The capabilities of the resulting design environment are de-
scribed and evaluated through a notional design excercise ad-
dressing a propeller retrofit study for an aged fishing vessel.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
2/10
II. C OMPUTATIONAL MODEL S
Core of the present automated design technique is the com-
putational hydrodynamics model used to predict propeller
performance under given operating conditions. In view of
the application to fishing vessels, emphasis is given here to
numerical models capable to describe ducted propellers.
With respect to conventional open screw propellers, ducted propellers have the advantage of increasing thrust and ef-
ficiency at low speed when an accelerating duct is used,
whereas the risk of blade cavitation is reduced by mounting
decelerating ducts. The hydrodynamic interaction between
propeller and duct is very complex and is characterized by
viscosity driven phenomena such as blade tips immersed into
the inner duct boundary layer, flow separation on outer duct
surface and thick viscous wakes downstream blunt duct trail-
ing edges. Nevertheless, an inviscid-flow approach is ca-
pable of capturing global interactional phenomena related
mainly to thrust-induced vorticity and three-dimensional un-
steady flow effects.Current approaches for the computational analysis of ducted
propellers include both inviscid (potential) and viscous flow
solvers. Inviscid methods are widely used because of their
robustness and limited computational effort required. Exam-
ples of these type of models are described in [1], [2], and in
recent work as [3].
Major drawbacks of inviscid-flow approaches are that flow
details where viscosity effects are dominant are neglected.
This may traduce into unreliable predictions of propeller
performance of screw operating in off-design conditions.
The exact description of viscous phenomena characterizing
duct/blade interaction requires viscous flow models based
on the solution of Navier-Stokes equations. An example ofRANS flow field calculations on a complete ducted propul-
sor is reported in [4]. Of course, sophisticated flow mod-
elling and highly-accurate results are obtained at computa-
tional costs that are typically unaffordable for design proce-
dures where several candidate configurations are evaluated
and compared to determine the best one.
A. Propeller Hydrodynamics Model
In view of the analysis above, a computational approach suit-
able for design scopes and based on inviscid-flow modelling
is proposed here and referred to as BEM hydrodynamics
model. Limitations typical for these types of methods areminimized by using a general formulation in which blade
trailing vorticity dynamics, boundary layer flow and cavita-
tion are described. Specifically, an approach for open screw
propellers developed and validated over the last decade (see
[5] and [6]) has been extended to analyse ducted propul-
sors [7]. Description of blade/duct interaction is enhanced
through trailing vortices alignment [8] and gap-flow mod-
elling proposed in [9].
Here, the computational model is briefly reviewed, whereas
details can be found in referenced papers above cited.
Assuming the onset flow is inviscid and incompressible,
propulsor-induced perturbation velocity v may be expressed
in terms of a scalar potential as v = and is governedby the Laplace equation 2 = 0. A classical mathemati-
cal model (e.g., [11]) yields that the perturbation velocity canbe determined through a boundary integral equation where is express as a superposition of singularities distributed over
the fluid domain boundary represented by the propulsor solid
surface and a surface describing the vortical wake gener-
ated by propeller blades. Impermeability conditions on solid
boudaries and vorticity convection along the wake surface
are imposed to define suitable boundary conditions. A key
feature of the methodology is that unknowns are distributed
only over these boundary surfaces and hence the additional
burden of unknowns distributed throughout the fluid region
typical of viscous-flow solvers is prevented.
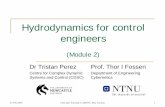
Figure 1: Computational grid for ducted propeller flow anal-
ysis through the BEM hydrodynamics model.
By discretization, the problem is recast as the solution of a
linear system of equations. Once the perturbation potential
is determined, the total velocity field follows as q = vI
+, where v
Ihas different expressions to describe the in-
coming flow to each propulsor component (screw and duct).Velocity and pressure fields are related through Bernoullis
theorem
t+
1
2q2 +
p
+ gz0 =
1
2v2I
+p0
, (1)
where p is the pressure, q = q, vI
= vI, and gz0 is the
hydrostatic head.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
3/10
As a result of the hydrodynamic analysis, open propeller
thrust TP
and torque QP
are calculated by integrating pres-
sure p and viscous friction over the propeller surface SP
:
TP
=
SP
pnx dS+
SP
tx dS (2)
QP = SP
p (r n)x dS+SP
(r t)x dS
where n and t are respectively unit normal and tangent to
SP
, and subscript x denotes vector projection along the pro-peller axis direction. In (2) above, the pressure is evaluated
via Bernoullis equation (1), whereas the friction coefficient
is estimated by coupling BEM and boundary-layer models or
simply from semi-empirical formulas for a flat plate in tur-
bulent flow, [10].
Replacing propeller surface with duct surface, similar ex-
pressions determine duct thrust TD
. Then, total ducted
propulsor thrust TT
is (using ITTC symbols)
TT
= TP
+ TD
(3)
whereas the thrust coefficient is KTT
= TT/12n2D4
P, with
n and D respectively propeller rotational speed (rps) anddiameter. Similarly, ducted propeller torque coefficient is
KQP
= QP
/12n2D5
P. Figure 1 shows a BEM model com-
putational grid describing a ducted propeller and vortical
wakes emanated by blades and by the duct trailing edge.
B. Neural Network Model
BEM hydrodynamics modelling can be used to evaluate
the performance of a given propeller once geometry and
operating conditions are assigned. Dealing with design,it is also important to develop procedures to find general
relationships between propeller performances and geome-
try/operating conditions. To achieve this, BEM hydrody-
namics model is combined with an Artificial Neural Network
(ANN) model.
Neural Networks denote a general approach to describe a
complex system through the relationships among Nin inputand Nout output variables without any explicit mathemati-cal input/output model, but simply through a learning pro-
cess. Developed over the last five decades, today ANNs are
widely used in many disciplines, and applied with different
aims such that of function approximation, classification anddata processing [20].
ANN architectures try to mimic biological systems: multiple
layers ofneurons are linked each other through synapses that
transfer information from the input layer to the output layer.
A feed-forward architecture implies that information flux is
mono-directional. Each neuron receives and processes infor-
mation from all neurons of the preceding layer through the
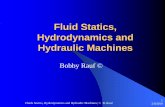
following steps (see Fig. 2):
1. information incoming to a neuron from all neurons of
the preceeding layer is summed and biased in order to
allow/disable activation of the neuron itself;
2. a proper transfer function modifies the income signal,
generating the output signal of the neuron;
3. the output signal is sent, through synapses, to all the
neurons in the following layer.
The output Yi(l) of a single neuron may be expressed as
Yi(l) = Fai(l)
= F
Nneur
j=1
wj
i(l)Xj + w0i(l)X
0)
0 l Llayer; Yi(0) = Xi; X0 = 1
where ai(l) represents the activation function, Xj the input
data to neurons weighted by quantity wj
i(l), related to the
connection between neurons. QuantityF is a monotone, con-tinous and differentiable transfer function. A sigmoid func-
tion is used here, see right Fig. 2.
In order to reproduce the input/output structure character-
izing a given system, ANNs require suitable training. The
problem of training a neural network consists in determin-
ing the optimal set of weights w that allows to describe a
response surface over the entire domain of the independent
variables with a minimum error; they are updated through a
recursive procedure that ends when neural numerical and de-
sired outputs differ less than a prescribed threshold. Specifi-
cally, a Levenberg-Marquardt algorithm, based on a gradi-
ent search direction calculated via a back-propagation of theerror, is here used [12].
Once training is completed, the ANN is ready to simulate
and predict the behaviour of any configuration described as
arbitrary combination of input variables. The only require-
ment is that queried input variables do not take values that
are significantly outside the range of variation of input vari-
ables used in the training phase. A major advantage of using
trained ANNs is that computational time required to predict
system output is negligible. Thus, this technique is appeal-
ing when combined with design and optimization procedures
where recursive calculations are necessary.
C. Numerical Optimization Model
In the design process of a marine propeller, one of the main
goals is the definition of the optimal combination of the de-
sign parameters, defining screw geometry and operating con-
ditions, in accordance to required performances. To have a
fast and automated design tool, an optimization procedure
based on trained ANNs to describe the physical behaviour of
the system is here proposed.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
4/10
Figure 2: Neural network architecture: multi-layer configuration and single neuron structure.
Numerical optimization applied to propeller design typically
implies that propeller performance figures (objective func-
tions) have to be maximized (or minimized) through varia-
tion of a given set of parameters defining propeller geome-
try and operating conditions (design parameters). Physical
or practical limitations to values that variables assume dur-
ing the optimization procedure are called constraints. In the
following sections, examples of design parameters, objective
functions and constraints are given.
In the present work, a numerical optimization procedure
based on genetic Algorithms (GAs) is considered. Basic fea-
tures of the methodology are given here, whereas details can
be found e.g. in [13], [14] and [15]. The underlying idea of
GAs is to mimic natural selection in the process of finding
the optimal solution. Candidate solutions during the opti-
mization procedures are called individuals and the whole set
of individuals is a population. Here, since binary-based GAs
are used, each individual is associated to a string of binary
digits (genes) ordered in a given sequence (chromosome).
At each step of the process, solutions corresponding to all
individuals are evaluated in terms of the objective functions.
A penalty-function technique [16] is used to include the con-
straints in the optimization process. A selection of the best
individuals, based on a fitness measure calculated from the
objective function and constraints, is done and chromosomestrings are saved to build a new generation. New offsprings
starting from the actual population are generated through
chromosome string manipulations (crossover). A mutation
operator is also applied to avoid premature convergence to
local optima, instead of global ones. The amount of chro-
mosone variations during the evolutionary process is con-
trolled in order to reduce the impact of random mutations as
the solution converges to an optimum. Furthermore, an elite
selection strategy is used to prevent new generations produc-
ing worse results than elder ones. The optimization proce-
dure is iterated untill the chromosomes similarity (bit-string
affinity) reaches a given value [13].
D. Parametric Search
An alternative approach to find the optimum inside a popu-
lation is represented by parametric search. Specifically, the
optimum is searched by investigating the region of design
variables space where all constraints are satisfied [17]. In this
case the search procedure is simply based on parametric vari-
ation of all design variables in order to span all the domain
of interest. The optimum is found by comparing objective
function values in all tested design variables space points.
Because of the dummy search technique, such a procedure
typically requires to test a larger number of conditions than
those investigated by numerical optimization algorithms and
hence it tends to be computationally inefficient, expecially
when the number of design variables growths. In the present
work parametric search is used to compare results from opti-
mization via GAs.
III. VALIDATION OF NEURAL NETWORK MODEL
A necessary step before application of ANNs to optimal de-
sign consists in assessing the capability of the proposed Neu-
ral Network Model to simulate performances of a general
class of propellers [18]. As an example of training dataset,
the Wageningen B-Series open propellers [19] are considered
here. Specifically, available experimental data for the Wa-
geningen B-Series allow to build an extensive dataset of 230
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
5/10
propeller models obtained from different combinations of ge-
ometry parameters as number of blades Z, pitch/diameter ra-tio P/D, expanded area ratio EAR. Each model is testedat advance ratio Ja = VA/nDp from zero (bollard pull) tozero thrust. Input/output relationship are sketched in Fig. 3.
A total of 4000 combinations of geometry and operational
conditions is then considered, for which measured propellerKT, K
Qand efficiency = (Ja/2)KT/KQ are known.
Figure 3: Neural Network training based on Wageningen B-
Series open propeller dataset: input/output relationships.
Two cases are considered:
(a) training dataset based on experimental data from the
original Wageningen series [19];
(b) training dataset for the same propeller series, with ex-
perimental data replaced by computational results from
BEM hydrodynamic model.
In order to perform Neural Network training first and val-
idation then, the whole dataset is splitted into two subsets.
The subset used in the training phase (training dataset) isobtained from the whole dataset by considering only dataset
entries at even values of Ja, whereas dataset entries at oddJa values form the subset used for ANN results validation.Results by the ANN architecture developed in the present
work are compared to those obtained using software
NeurosolutionsTM [21]. In order to make the two ANN
models comparable, input data arrangement and neurons
transfer function used are the same, and both models use a
Levenberg-Marquardt procedure for the gradient search in
the back propagation step [20]. Moreover, a check on the cor-
rectness of the hidden layer compositions in terms of number
of neurons has been made, by adopting a genetic algorithmscheme in the determination of the optimal layers dimension
[15]. This form of optimization requires that the network
be trained several times in order to find the combination of
inputs that produces the lowest error.
The comparison between original Wageningen B-Series
open propeller data and those obtained from Neural Network
test simulations is described in Figs. 4, 5. Figures 4 depict
error maps of calculated propeller KT
versus original data
[19] in particular, the figure shows the influence of two input
variables, J and P/D, for given value of other ones, Z = 4and Ae/A0 = 0.85. ANN prediction error is below 4% overa wide range of input variables P/D,J. Only exception is10% error peaks in the boundary region with lowest P/Dand highest J values (thrust close to zero). Results by the
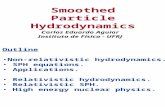
two ANN models are in good agreement. Similar results areobtained for other output variables KQ and .The quantitative comparison of original vs. ANN-predicted
data is confirmed by Figure 5, where actual KT
results are
shown for three different values of P/D. B-Series exper-imental data [19] and ANN results are within plotting ac-
curacy. In particular, results by the present ANN model and
those from commercial softwareNeuroSolutionsTM software
[21] are in excellent agreement.
Figure 5: ANN prediction of Wageningen B-Series pro-
peller KT: Z = 4, AE/A0 = 0.85,P/D = [0.6, 1.0, 1.4].Original data [19] compared to present ANN model and
NeuroSolutionsTM software [21].
IV. AUTOMATED DE SIGN: CASE STUDY
The integrated BEM hydrodynamics-Neural Networks
model is coupled to numerical optimization via Genetic Al-
gorithms and applied to a propeller design exercise.
Akin to classical propeller series like the Wageningen B-
Series, a basic assumption here is that a propeller series may
be built by considering only fourdesign parameters:
the propeller diameterDP
the number of blades, Z
the expanded area ratio, EAR
pitch to diameter ratio, P/D
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
6/10
Figure 4: Prediction by Neural Networks of Wageningen B-Series propeller thrust coefficient KT: Z = 4, AE/A0 = 0.85.Error map between calculated and original data [19]. Left: present ANN model; right: NeuroSolutionsTM software [21].
Other blade geometry details including radial distributions of
chord, pitch, skew, sectional profile thickness and camber are
implicitely defined through combinations of the four design
variables above.
The design objective is to maximize hydrodynamic effi-
ciency while keeping fixed delivered torque Qd (and powerPd, with n also kept constant).Then, design constraints are imposed as follows:
1. torque absorbed by propeller at given rps matches
delivered torque within a 2.5% allowed deviation:
|(QQd)/Qd| 0.025;
2. propeller thrust at given ship speed matches hull resis-
tance within a 2.5% deviation: |(TR)/R| 0.025;
3. propeller diameter is limited to fit into an existing after-
body layout: DP Dmax;
4. cavitation condition based on Kellers Formula:
EAR EARmin, with [19]:
EARmin =(1.3 + 0.3Z)T
(p0 pv)D2P+ k (4)
where k = 0.2 is used for single-screw vessels.
Constraint no. 2 implies that vessel speed cannot be lower
than reference speed VS . Then, hydrodynamic efficiency op-timization means that thrust (and vessel speed) is increased.
A real-life case study is derived from existing vessel data
analysed during the EU-FP6 research project SUPER-
PROP, [7]. Aim of the project (2005-2008) was to analyse
tecno-economical aspects related to retrofitting propellers of
aged boats like trawlers and tugs.
The reference configuration chosen here reflects the propeller
of a fishing vessel of about 1400 T gross weigth, 70 m length,
2000 kW/375 RPM engine power at MCR. Considering free-
running conditions, design parameters for this reference con-
figuration are:
reference ship speed, VS
= 7.31 m/s
delivered power, Pd = 1714 KW
engine rotational speed, n = 4.17 rps
maximum diameter allowed, DP
= 2.7 m
Combining model test and sea-trials data from the project
above, hull resistance curve R = R(VS
), wake fraction (1wt) and thrust deduction (1 t) factors are known for thisreference configuration.
The optimum search is based on numerical optimization via
genetic algorithms and results are compared to those ob-
tained by the parametric search approach. In particular, the
parametric search procedure can be summarized as sketched
in Fig. 6: (i) determine the condition for DP
satisfying the
KQ
-constraint; (ii) determine the condition for VS
satisfy-
ing the KT-constraint; (iii) check other constraints affectingEAR in combination to D
P, V
S.
Considering alternative optimum search techniques (para-
metric search Vs. numerical optimization) and NN training
dataset (experimental Vs. BEM hydrodynamics), four differ-
ent combinations are obtained and addressed here below.
With respect to design variables, a set of optimal conditions,
for which the choice of the best is made only by comparison
of the chosen objective function, is shown in Figs. 8 to 10.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
7/10
Figure 6: Parametric search algorithm to determine the opti-
mal propeller operating in the hull wake.
Figure 7: Parametric search algorithm to determine the op-
timal propeller operating in the hull wake: efficiency versus
the pitch to diameter and the expanded area ratio.
All figures show a sequence of points representing local min-
ima when Z is fixed and input variables P/D and EAR arechanged. For the case Z=5, Fig. 7 shows the subset of solu-
tions satisfying all constraints. Among all points, one is the
optimum in that efficiency is maximised.Typically, the minimum lies on the boundaries of the domain;
in particular, results in Figg. 9 and 10 show the propeller
diameter is in the nearby of its maximum allowable value,
whereas the expanded area ratio is very close to its minimum
required value. Discrepancies between results obtained us-
ing parametric search and GA optimization are mainly due
to different strategies used to update input variable values in
both approaches. In particular, EAR is updated with step
(EAR) = 0.01 whereas a smaller step is used in the GAprocedure. As a consequence, parametric search and GA so-lutions are shifted whereas predicted slopes are very similar.
Next, the effect of using numerical or experimental data to
train the NN model is analysed. This kind of comparison is
very important because it reveals the error that occurs when
a numerical model is used instead of experimental data.
Discrepancies are now much more evident, and vary between
6% for quantitity P/D to only 2% in case of predicted op-timum efficiency. The above differences yield that for the
present case small performance differences are obtained be-
tween a four-bladed propeller and a five-bladed propeller.
The selection between these two candidate solutions is then
postponed to results of careful analysis addressing cavitation
risks, acoustic and vibratory response of the propeller.
V. EXTENSION TO DUCTED PROPELLERS
The propeller design exercise described above refers to open
screw configurations. In view of application of the proposed
methodology to working boats like fishing and supply ves-
sels, the extension to include ducted propeller modelling ca-
pabilities is necessary.
To this aim, the integrated BEM hydrodynamics/Neural-
Networks/numerical optimization tool described above is
easily generalized once open propeller hydrodynamics by
BEM is extended to ducted propellers. Work underway inthis area is described in the present section.
In order to assess the proposed methodology, the present nu-
merical model has been used to predict global performances
of the original propeller mounted on the fishing vessel taken
as the reference case. Its model propeller is denoted E1622
in the INSEAN nomenclature and is characterized by a pitch
to diameter ratio, P/D, equal to 1.0 and an expanded arearatio Ae/A0 0.85. Experimental data are available for the
propeller working in ducted as well as in unducted configu-
ration.
In Fig.11 predicted thrust and torque are compared to exper-
imental data for the INSEAN E1622 isolated propeller case.A good agreement is shown for all values of the advance co-
efficient. Propeller thrust coefficient KT is slightly under- predicted at high values ofJ. Next, in Fig.12 the ductedpropeller configuration is considered and results obtained by
using different trailing wake models are compared. Specif-
ically, results are labelled respectively as PW and FW,where PW stands for numerical calculations considering a
prescribed helicoidal wake shape, whereas the notation FW
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
8/10
Figure 8: Automated design procedure. Comparison be-
tween parametric search and GA optmization. NNs trained
with numerical and experimental data. Top: efficiency vs.
blade number. Bottom: pitch ratio vs. blade number.
refers to results by using a flow-aligned trailing wake ?? de-
termined from open propeller simulations at equivalent load-
ing conditions. At high values ofJ (above 0.5) the totalthrust coefficient is overpredicted by using any wake shape,
and this is mainly due to an overestimation of the duct con-
tribution. At low values ofJ, the propeller contribution tothrust is overpredicted, whereas the duct contribution is un-
derpredicted. As far as duct contribution to thrust is con-
cerned, the use of a flow-aligned wake improves numerical
predictions, whereas propeller thrust is generally not influ-
enced (with slight overprediction of experimental data at low
values ofJ) if a free wake model is included.The above mentioned tests reveal that the introduction of a
flow-aligned wake is a crucial issue in order to accurately
Figure 9: Automated design procedure. Comparison be-
tween parametric search and GA optmization. NNs trained
with numerical and experimental data. Top: diameter vs.
blade number. Bottom: ship speed vs. blade number.
predict ducted propellers performance. The inclusion of a
wake-alignement technique for the complete propeller/duct
configuration is then deemed necessary and represents the
objective of ongoing work.
VI. CONCLUDING REMARKS
An automated computational methodology for the prelimi-
nary design of marine propellers has been described. The
methodology combines inviscid-flow hydrodynamics mod-
elling, Neural Networks and numerical optimization via Ge-
netic Algorithm into a fast and robust tool that can be used
at reduced computational costs. In the paper, the computa-
tional methodology has been outlined and ongoing develop-
ment and validation work has been presented.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
9/10
Figure 10: Automated design procedure. Comparison be-
tween parametric search and GA optmization. NNs trained
with numerical and experimental data. Top: EAR vs. blade
number. Bottom: deviation from EARmin.
In particular, simple numerical applications have been pre-
sented to assess the capability of the whole methodology to
correctly predict optimal configurations for given operating
conditions and other design constraints. Although the no-
tional nature of the design excercise addressed, model capa-
bilities are demonstrated and the following conclusions can
be drawn.
The computational hydrodynamics model based onBEM provides reliable predictions of propeller per-
formances over a wide range of operating conditions.
Ducted propeller modelling reveals critical aspects at
low advance ratio that require further investigations.
The proposed Neural Network model provides a pow-
Figure 11: INSEAN E1622 unducted propeller open water
performance. Comparison between BEM results and experi-
mental data.
erful tool to predict input/output relationships to de-
scribe a virtual systematic propeller series built on user-
defined characteristics.
Applications of the Neural Network/BEM hydrodynam-ics model to simulate experimental results for the Wa-
geningen B-series demonstrate virtually-generated pro-
peller series can be easily built.
The proposed automated technique is able to determinethe optimal configuration given operating conditions
and design constraints.Future work will focus on improving BEM hydrodynamics
modelling of ducted propeller configurations and creating
virtual ducted propeller systematic series by using the pro-
posed Neural Network strategy.
ACKNOWLEDGEMENT
The present work has been partly supported in the frame of
Project SUPERPROP, Superior Life-time Operation Econ-
omy of Ship Propellers, under EU-FP6 grant TST4-CT-
2005-516219, and by Italian Ministry for Transports in the
frame of project Programma Ricerche INSEAN.
-
8/6/2019 Automated Marine Propeller Design Combining Hydrodynamics Models and Neural Networks
10/10
Figure 12: INSEAN E1622 ducted propeller open water per-
formance. Comparison between BEM results and experi-
mental data. Top: screw and duct thrust. Bottom: total thrust
and torque.
References
[1] Kerwin, J.E., Kinnas, S.A., Lee, J.-T., Shih, W.-Z. (1987) A
surface panel method for the hydrodynamic analysis of ducted
propellers, Transaction SNAME, vol. 95, 1987.
[2] Hughes, M.J. (1997). Implementation of a Special Procedure
for Modeling the Tip Clearance Flow in a Panel Method for
Ducted Propellers, Propellers/Shafting 97 Symposium, Vir-
ginia Beach (USA).[3] Baltazar, J., Falcao de Campos, J.A.C. (2009). On the
Modelling of the Flow in Ducted Propellers with a Panel
Method, First International Symposium on Marine Propul-
sors, SMP09, Trondheim (Norway), June 2009.
[4] Sanchez-Caja, A., Pylkkanen J.V., Sipila, T.P. (2008) Simu-
lation of the Incompressible Viscous Flow around Ducted Pro-
pellers with Rudders Using a RANSE Solver, 27th Sympo-
sium on Naval Hydrodynamics, Seoul (Korea), October 2008.
[5] Pereira, F., Salvatore, F., Di Felice, F. (2004). Measurement
and Modelling of Propeller Cavitation in Uniform Inflow.
Journal of Fluids Engineering, Vol. 126, 2004, pp. 671-679.
[6] Salvatore, F., Testa, C., Ianniello, S., Pereira, F. (2006).
Theoretical Modelling of Unsteady Cavitation and Induced
Noise, Proceedings of CAV 2006 Symposium, Wageningen
(The Netherlands) September 2006.
[7] Salvatore, F., Calcagni, D., Greco, L. (2006). Ducted pro-
peller performance analysis using a boundary element model,
INSEAN Technical Report / 2006-083, 2006.
[8] Greco, L., Salvatore, F., Di Felice, F. (2004). Validation of a
Quasipotential Flow Model for the Analysis of Marine Pro-
pellers Wake. Twenty-fifth ONR Symposium on Naval Hydro-
dynamics, St. Johns, Newfoundland (Canada), August, 2004.
[9] Hughes, M. J. (1993) Analysis of Multi-Component Ducted
Propellers in Unsteady Flow, PhD Thesis, M.I.T., May 1993.
[10] Harvald, S. A. (1992). Resistance and Propulsion of Ships.
Wiley Interscience Pubilication, New York, USA.
[11] Morino, L. (1993), Boundary Integral Equations in Aerody-namics, Applied Mechanics Reviews, Vol. 46, No. 8, pp. 445-
466.
[12] Principe, J.C., Euliano, N.R., Lefebvre, C. (2000) Neural
and Adaptive Systems: Fundamentals Through Simulations,
ISBN: 0471351679, John Wiley and Sons Inc., New York,
USA.
[13] Raymer, P.D. (2002) Enhancing Aircraft Conceptual Design
Using Multidisciplinary Optimization, PhD Thesis, ISBN:
9172832592 Royal Institute of Technology, Stockholm (Swe-
den), May 2002.
[14] Holland, J.H. (1975) Adaptation in Nature and Artificial Sys-
tems, Univers. of Michigan Press, Ann Arbor.
[15] Goldberg, D.E. (1989), Genetic Algorithms in Search, Opti-
mization and Machine Learning, Addison Wesley.
[16] Hatfka, R.T., Gurdal, Z. (1992) Element of Structural Opti-
mization, Kluwer Academy Publishers, Dordrecht.
[17] Myers, R.H., Montgomery, D.C. (1995) Response Surface
Methodology, ISBN: 0471581003, John Wiley and Sons Inc.,
New York, USA.
[18] Roddy, R.F., Hess, D.E., Faller, W. (2006) Neural Network
Predictions of the 4-Quadrant Wageningen Propeller Series,
David Taylor Technical Report NSWCCD-50-TR-2006/004,
April 2006.
[19] Kuiper, G. (1992), The Wageningen Propeller Series, Marin
Pubblication No. 92-001.
[20] Haykin, S. (1999) Neural Networks: A comprehensive foun-
dation, Second edition, Prentice-Hall.
[21] NeuroSolutions: Getting Started Manual, Version 5, NeuroDi-
mension, Inc., Gainesville, FL, USA.