SECURITY IN DISTRIBUTED FILE SYSTEMS Tejaswini Kalluri, Venkata Prudhvi Raj Konda, Kanna Karri.
Upload
moris-robertsCategory
view
225download
1
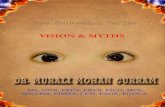
Automated 3D Object Modeling from Aerial Video Imagery
Prudhvi Krishna GurramPh.D. Student
Chester F. Carlson Center for Imaging Science,
Rochester Institute of Technology
Army Research Laboratory, MD
Date: 09/02/2009

Outline
Introduction Motivation Research objectives Approach & Results
Pre-processing step Building stereo mosaics 3D object identification 3D object modeling
Summary and conclusions Future work recommendations
Prudhvi Gurram, Research Seminar04/19/23 2

Introduction Applications of physically realistic 3D scenes
Military applications include target area simulation and moving target detection
Civilian applications include damage assessment in case of natural disasters
Other applications include medical imaging, robotic vision Reconstructed 3D scenes must conform to real scenes in terms of
Geometry Radiometry
RIT has the Digital Imaging and Remote Sensing Image Generation (DIRSIG) tool which can create spectrally accurate synthetic imagery by simulating different sensor types.
DIRSIG requires pre-defined 3D geometrical scene with spectra assigned to each facet of the scene
04/19/23Prudhvi Gurram, Research Seminar
3

Motivation
04/19/23Prudhvi Gurram, Research Seminar
4
High-Resolution VideoHigh-Resolution VideoLidar DataLidar Data
Spectral ImagerySpectral Imagery
Spectrally-Accurate Spectrally-Accurate Scene ModelScene Model
Rapidly construct radiometrically-correct scene models based on
multi-sensor data for use in DIRSIG synthetic scene generation

Motivation Objective
Extraction of 3D geometry of a scene from aerial video over a large scene
Possible Approaches Manual Interpretation of Stereo Imagery (Very intensive and time
consuming for large areas in the order of days or even months) Automated processing of video frames to build stereo mosaics for the
extraction of 3D geometry
Combine this with information from Lidar to improve the accuracy of the 3D Scene
Combine the 3D coordinates with material properties from Hyperspectral imaging to render a 3D Scene which conforms both geometrically and radiometrically to real world
04/19/23Prudhvi Gurram, Research Seminar
5

Research Objectives
Build stereo mosaics from video frames over large scenes
Identify 3D objects like buildings and trees in the scene using stereo mosaics
Accurately model 3D buildings in the scene Improve the accuracy of 3D object
identification and modeling by fusing Lidar data with visual imagery
04/19/23Prudhvi Gurram, Research Seminar
6

Approach
04/19/23Prudhvi Gurram, Research Seminar
7
Video Fram
es
Pre-processing of
the video frames
Ray Interpolation
3D Object Identificatio
n and Modeling
3D Models
Exterior Orientation (EO) and Interior Orientation (IO)
parameters
Orientation-corrected video
frames
Stereo Mosaics
Inputs
Intermediate output and visual aid
Final output

04/19/23Prudhvi Gurram, Research Seminar
8
Video Fram
es
Pre-processing of
the video frames
Ray Interpolation
3D Object Identificatio
n and Modeling
3D Models
Exterior Orientation (EO) and Interior Orientation (IO)
parameters
Orientation-corrected video
frames
Stereo Mosaics

Initial Video FramesExterior and Interior Orientation parameters
04/19/23Prudhvi Gurram, Research Seminar
9
Rotation matrix
Camera centeror
Viewpoint
1R
1T
2R
2T
NR
NT
Video Camera
100
/0
0/
p
p
ydf
xdf
K
Interior orientation matrix

04/19/23Prudhvi Gurram, Research Seminar
10
Video Fram
es
Pre-processing of
the video frames
Ray Interpolation
3D Object Identificatio
n and Modeling
3D Models
Exterior Orientation (EO) and Interior Orientation (IO)
parameters
Orientation-corrected video
frames
Stereo Mosaics

Pre-processing of Video Frames
04/19/23Prudhvi Gurram, Research Seminar
11
Correct the orientation of the frames so that all the frames have same orientation (nadir looking).
Observed motion parallax of objects is due to translational motion of camera only.
)()( TPRTPRRRP worldworld
A world point can be expressed in camera coordinate system with Rotation matrix R and camera center at T as
worldP
World coordinate system ↓
Camera coordinate system

Pre-processing (contd…)
04/19/23Prudhvi Gurram, Research Seminar
12
The image coordinates in any frame i are transformed by matrix A, to observe only translational motion in the sensor
)(11'iworldimiimim TPKPKKRAPP
iii
TPKR
k
ky
kx
P worldim
The image coordinates of this point are given by Interior Orientation parameters embedded in matrix K
Camera coordinate system ↓
Image coordinate system

04/19/23Prudhvi Gurram, Research Seminar
13
Video Fram
es
Pre-processing of
the video frames
Ray Interpolation
3D Object Identificatio
n and Modeling
3D Models
Exterior Orientation (EO) and Interior Orientation (IO)
parameters
Orientation-corrected video
frames
Stereo Mosaics

04/19/23Prudhvi Gurram, Research Seminar
14
Parallel Ray Interpolation Why are we using Parallel Ray Interpolation?
To convert the view from perspective view to parallel-perspective view Simulating a linear pushbroom camera To use motion parallax information (while creating mosaics) To make the stereo mosaics seamless
Perspective view Parallel view

Perspective ViewParallel ViewParallel View from Perspective View
Using Fixed Lines
Parallel and Perspective views
04/19/23Prudhvi Gurram, Research Seminar
15

04/19/23Prudhvi Gurram, Research Seminar
16
Ray InterpolationViewpoint 2Viewpoint 1
InterpolatedViewpoint
Image (Mosaic) Plane
Point in the image planefrom viewpoint 1
Point in the image planefrom viewpoint 2
Point in the image plane from the interpolated viewpoint
Acknowledgement:
Zhigang Zhu et al.,
City College of New York,
New York City, NY

04/19/23Prudhvi Gurram, Research Seminar
17
PRISM (Parallel Ray Interpolation for Stereo Mosaicing)
Frame 1 Frame 2

04/19/23Prudhvi Gurram, Research Seminar
18
Frame 1:
Frame 2:
Fixed Line
Fixed Line
Overlapped Region
Fixed Lines
Image Frame
Fast PRISM

04/19/23Prudhvi Gurram, Research Seminar
19
Fra
me
1
Fra
me
2
Source Triangles
Fast PRISM
Des
tinat
ion
Tria
ngle
sin
the
Lef
t M
osai
c

04/19/23Prudhvi Gurram, Research Seminar
20
Motion Parallax
Frame 1 Frame 2Interpolated Frame(before triangulation)
Can happen with low-flying aircraft and high-rise buildings

04/19/23Prudhvi Gurram, Research Seminar
21
Interpolation
Frame 1 Frame 2Overlay of Frames 1 and 2Interpolation

04/19/23Prudhvi Gurram, Research Seminar
22
Interpolation
Frame 1 Frame 2Interpolation

04/19/23Prudhvi Gurram, Research Seminar
23
Triangulation Problem
Frame 1 Frame 2Interpolated Frame(after triangulation)

04/19/23Prudhvi Gurram, Research Seminar
24
Modified PRISM
Make sure that none of the triangles include regions with different motion parallax
Find edges of different regions and align the sides of triangles with the edges
Use segmentation to obtain different planar surfaces
The inner boundary of each segment forms an edge of a region/object

04/19/23Prudhvi Gurram, Research Seminar
25
Overlapped region
Frame 1:
Frame 2:

04/19/23Prudhvi Gurram, Research Seminar
26
Segmented images
Segmented Frame 1:
Segmented Frame 2:

04/19/23Prudhvi Gurram, Research Seminar
27
Frame k
Segments in Overlapped Region
One of the segments
Significant points using Convex Hull around the segment
Triangulation

04/19/23Prudhvi Gurram, Research Seminar
28
Frame k+1Matching curve
The other part of the segment between matching curve and fixed line
Triangulation

04/19/23Prudhvi Gurram, Research Seminar
29
On the Mosaic
“Orphan” Pixels Orphan pixels filled
• Using a constraint inherent in the Parallel-Perspective view
• Parallel view in dominant motion direction and Perspective view in the other direction
• Do not consider motion parallax along x direction
• In 3D translational case, use sequential linear interpolation to fill the orphan pixels
X
Y
Direction

Results – Set 1
04/19/23Prudhvi Gurram, Research Seminar
30
MotionParallax
Frame 1 Frame 2
Fast PRISM Modified PRISM

Results – Set 2
04/19/23Prudhvi Gurram, Research Seminar
31
Fast PRISM Modified PRISM
Publications:1. P. Gurram, E. Saber, and H. Rhody, “A Novel Triangulation Method for Building Parallel-Perspective
Stereo Mosaics”, Proceedings of Electronic Imaging Symposium, SPIE, San Jose, CA, January 2007.2. P. Gurram, E. Saber, and H. Rhody, “Segment-based Mesh Design for Building Parallel-Perspective
Stereo Mosaics”, Accepted for publication in IEEE Transactions on Geoscience and Remote Sensing

04/19/23Prudhvi Gurram, Research Seminar
32
Stereo Mosaic – Modified PRISM

04/19/23Prudhvi Gurram, Research Seminar
33
Video Fram
es
Pre-processing of
the video frames
Ray Interpolation
3D Object Identificatio
n and Modeling
3D Models
Exterior Orientation (EO) and Interior Orientation (IO)
parameters
Orientation-corrected video
frames
Stereo Mosaics

3D Object Identification and Modeling (Deterministic Approach)
Build a nadir mosaic along with left and right stereo mosaics with fixed line looking in nadir direction
Use image segmentation to identify the various homogeneous surfaces in the mosaics
Manually set the segmentation input parameters Each homogeneous surface is treated as a planar surface Use deterministic thresholds to identify polyhedral building surfaces based on
elevation map generated using stereo mosaics
04/19/23Prudhvi Gurram, Research Seminar
34
Image Plane
Scene
Viewpoints
Left mosaic Nadir mosaic Right mosaic
Sensor motion

Deterministic Approach (contd…)
04/19/23Prudhvi Gurram, Research Seminar
35
Nadir mosaic Segmentation
Tree regions
Building surfaces extraction using
height information
Each surface
Boundary of each surface
Right mosaic
Left mosaic
Plane fit for each surface using disparity
between mosaics
Corners through Curvature Scale
Space
Edges through line fit between corners
CAD model of each building
DTM
Digital Elevation Model (DEM)
Reconstructed scene
100 200 300 400 500 600 700 800 900 1000 1100
50
100
150
200
250
300
350
400
450
500
Noise
Solar shadow
Problems in 3D model of a
building due to solar shadow and noise in
images
Stereo pair
Nadir mosaic

04/19/23Prudhvi Gurram, Research Seminar
36Raw Lidar CAD Model from Lidar
Good Elevation
and Planes
Solar shadow
Noise
There is no information in these cases as one planar surface merges with a neighboring surface at a different height during segmentation
Video
Lidar
Fusing Lidar data with visual imagery

Problems with Deterministic Approach Had to set the segmentation input parameters manually Manually select Regions-Of-Interest (ROI) around buildings which is
tedious over large scenes Sparse depth/elevation map from stereo mosaics led to inaccurate 3D
models Noise in the images led to problems with modeling 3D buildings (missing
surfaces etc.) Deterministic thresholds led to the models being overfitted to a particular
data set Some of the above problems can be avoided by fusing Lidar data with visual
imagery
04/19/23Prudhvi Gurram, Research Seminar
37
Publications:1. Prudhvi Gurram, Eli Saber and Harvey Rhody, "Extraction of Digital Elevation Map from Parallel-
Perspective Stereo Mosaics", IS&T/SPIE Electronic Imaging Symposium, San Jose, CA, Jan. 2008.2. Prudhvi Gurram, Steve Lach, Eli Saber, Harvey Rhody and John Kerekes, "3D Scene Reconstruction
through a Fusion of Passive Video and Lidar Imagery", IEEE Applied Imagery Pattern Recognition Workshop, Washington, DC, Oct. 2007.

3D Object Identification and Modeling Two Parts
Object Identification (Buildings, Trees, Terrain, etc.) Using Global Statistics of various features in Bayesian network for
classification of surfaces Features include elevation map from visual imagery (stereo mosaics),
elevation from Lidar data, color information, edges and corners extracted from visual imagery
Object modeling (3D Buildings) Identified building surfaces have inaccurate 3D geometry due to sparse depth
maps provided by stereo mosaics Improving accuracy of the building geometry measurements obtained from
stereo mosaics using local optimization and individual video frames.
04/19/23Prudhvi Gurram, Research Seminar
38

3D Object Identification
Why Bayesian Networks? Useful in representing causal relationships between the
features/nodes Specify conditional independence among the features Easier to combine prior knowledge (structure of the BN)
with data Easier for an expert to intervene and predict the effects of
such an intervention Avoid overfitting of models to a particular data set
04/19/23Prudhvi Gurram, Research Seminar
39

Bayesian Network Semantics The features constitute the nodes of the
BN If X is connected to Y (causal
relationship), X is called the parent of Y Any node has conditional probability
distribution P(X|Parents(X)) → P(X|A,B) The probabilities associated with each
node are called parameters BN defined by
Structure (causal relationships) Parameters (probabilities – conditional or
prior)
04/19/23Prudhvi Gurram, Research Seminar
40
X
Y Z
A B
Parents of X
Conditionally independent
given X
Causal relationship

Bayesian Network Structure
04/19/23Prudhvi Gurram, Research Seminar
41
BN structure to use visual imagery and Lidar data
BN structure to use visual imagery only
Region
RegionOther features in the BN1.Elevation information from stereo mosaics2.Elevation information from Lidar data3.Corner information from nadir mosaic4.Color information from nadir mosaic5.Texture information from nadir mosaic6.Area of regions
Classes: 1 – Buildings, 2 – Grass, 3 – Trees, 4 – Asphalt, 5 – Misc.

Stereo Mosaics
04/19/23Prudhvi Gurram, Research Seminar
42
Original Video frames
Left
mosa
icN
adir
m
osa
icR
ight
mosa
ic

Mosaics and Lidar Data
04/19/23Prudhvi Gurram, Research Seminar
43
Stereo Mosaics
Lidar data (Rasterized and registered to nadir mosaic by flying a linear pushbroom camera over
Lidar point cloud)

Truth Map and Pseudo Truth Map
04/19/23Prudhvi Gurram, Research Seminar
44
Tru
th m
apN
adir
mos
aic
Seg
men
t m
ap
Pse
udo
Tru
th m
ap
Generated using mean-shift image segmentation with spatial bandwidth and color bandwidth15sh 10ch
Classes: 1 – Buildings, 2 – Grass, 3 – Trees, 4 – Asphalt, 5 – Misc.

Feature Extraction Elevation information from stereo mosaics
Match corresponding points in left, right and nadir mosaic (along the boundaries of segments) using correlation technique and epipolar constraints of parallel-perspective stereo mosaics
Use stereo geometry of parallel-perspective stereo mosaics to extract depth/elevation map
Fit least squares planes for each segment in nadir mosaic Use RANdom SAmple Consensus (RANSAC) algorithm to remove outliers (due to bad
segmentation and bad point matches) during plane fit Use mean height, minimum height, maximum height, number of inliers during plane fit as
features in the BN
04/19/23Prudhvi Gurram, Research Seminar
45
Observe the noise in the elevation map – this is due to over segmentation of tree regions and bad matches of points

Feature Extraction Elevation information from Lidar data
Elevation map readily available from Lidar point cloud Fit least squares planes for each segment in nadir mosaic Use RANdom SAmple Consensus (RANSAC) algorithm to remove outliers (due to bad
segmentation) during plane fit Use mean height, minimum height, maximum height, number of inliers during plane fit as
features in the BN
Corner information from nadir mosaic Extract 2D corners from each segment of nadir mosaic Orthorectify the corners using initial elevation map from stereo mosaics Use total number of corners, number of right angle corners, 45 degree, 135 degree
corners as features in the BN
Surface area of each segment in absolute units (m2) Mean values of hue and saturation of each segment
04/19/23Prudhvi Gurram, Research Seminar
46

Feature Extraction
04/19/23Prudhvi Gurram, Research Seminar
47
Visual entropy determined over 9x9 window on nadir mosaic
Lidar entropy determined over 9x9 window on rasterized Lidar data
Entropy represents the energy of the data over a window – can be used to represent the presence of texture in visual images and presence of changes of height in Lidar data

Bayesian Network Learning and Inference
Equal frequency binning used to discretize the features Known structure and Incomplete data
Hidden nodes introduced by expert to make causal dependencies explicit
Use Expectation-Maximization (EM) algorithm to learn the parameters of the nodes given all the training data
During testing phase, use Junction tree inference algorithm to marginalize over the nodes for which evidence is provided and obtain the posteriori probabilities of desired node (Region)
04/19/23Prudhvi Gurram, Research Seminar
48

Decision Theory
Decision theory = ‘Probability theory’ + ‘Utility theory’
User-defined utilities are used to determine how the posteriori probabilities are used for making decisions
For region classification, utilities are set in such a way that the class with Maximum A Posteriori (MAP) probability is chosen
04/19/23Prudhvi Gurram, Research Seminar
49

Automated Choice of Best Segmentation Input Parameters Mean-shift image segmentation input parameters
Spatial bandwidth is set at a constant level since its variation does not considerably change the segmentation results
Color bandwidth is varied from 2 to 20 in steps of 2 10 sets of input parameters
The best set of parameters chosen based on the quality of classification results
Quality metric: Weighted sum of differences of True Positive Rate and False Positive Rate
where represents one case of input parameter
represents the class number True Positive is a hit and False positive is a false alarm True positives and false positives are calculated in terms of pixels but not
regions
04/19/23Prudhvi Gurram, Research Seminar
50
N
i
ki
kii
hc FPTPWh
kc 1
max
sh
ch
kch
i

Results – Visual Data Only
04/19/23Prudhvi Gurram, Research Seminar
51
Building Class Trees Class
2 0.8326 0.0802 0.7524 0.9033 0.086 0.81734 0.8375 0.0705 0.767 0.8711 0.0764 0.79476 0.8109 0.0491 0.7618 0.9099 0.1034 0.80668 0.7871 0.0482 0.7389 0.8951 0.0806 0.814510 0.8474 0.0774 0.77 0.9111 0.0968 0.814312 0.7951 0.0634 0.7318 0.8841 0.081 0.803114 0.7735 0.0594 0.7142 0.8415 0.0658 0.775716 0.8322 0.0664 0.7658 0.7879 0.0646 0.723318 0.8131 0.0829 0.7302 0.8267 0.0596 0.767220 0.8026 0.0711 0.7315 0.7648 0.0523 0.7125
ch TP FP FPTP TP FP FPTP
Best Parameter 10ch
Classification map
Weights used:
0,0,0,0,1 54321 WWWWW

Results – Visual Data Only
04/19/23Prudhvi Gurram, Research Seminar
52
Best Parameter 2ch
Classification map
Weights used:
0,0,0,9.0,1.0 54321 WWWWW

Results – Visual and Lidar fusion
04/19/23Prudhvi Gurram, Research Seminar
53
Building Class Trees Class
2 0.9478 0.0273 0.9204 0.9552 0.0291 0.92614 0.9651 0.0499 0.9151 0.9516 0.0273 0.92436 0.9576 0.0346 0.923 0.9527 0.028 0.92488 0.9609 0.0476 0.9133 0.9512 0.0278 0.923410 0.9604 0.0151 0.9453 0.9504 0.0277 0.922712 0.959 0.0197 0.9393 0.9483 0.0252 0.923114 0.9424 0.0225 0.9199 0.942 0.0227 0.919316 0.9433 0.0481 0.8952 0.9471 0.0224 0.924818 0.9189 0.0996 0.8194 0.9457 0.0226 0.923120 0.9188 0.1236 0.7952 0.9419 0.0225 0.9195
ch TP FP FPTP TP FP FPTP
Best Parameter 10ch
Classification map
Weights used:
0,0,0,0,1 54321 WWWWW

Comparison of the Two Classifiers
04/19/23Prudhvi Gurram, Research Seminar
54
Building Class Trees Class
2 0.8326 0.0802 0.7524 0.9033 0.086 0.81734 0.8375 0.0705 0.767 0.8711 0.0764 0.79476 0.8109 0.0491 0.7618 0.9099 0.1034 0.80668 0.7871 0.0482 0.7389 0.8951 0.0806 0.814510 0.8474 0.0774 0.77 0.9111 0.0968 0.814312 0.7951 0.0634 0.7318 0.8841 0.081 0.803114 0.7735 0.0594 0.7142 0.8415 0.0658 0.775716 0.8322 0.0664 0.7658 0.7879 0.0646 0.723318 0.8131 0.0829 0.7302 0.8267 0.0596 0.767220 0.8026 0.0711 0.7315 0.7648 0.0523 0.7125
ch TP FP FPTP TP FP FPTP Building Class Trees Class
2 0.9478 0.0273 0.9204 0.9552 0.0291 0.92614 0.9651 0.0499 0.9151 0.9516 0.0273 0.92436 0.9576 0.0346 0.923 0.9527 0.028 0.92488 0.9609 0.0476 0.9133 0.9512 0.0278 0.923410 0.9604 0.0151 0.9453 0.9504 0.0277 0.922712 0.959 0.0197 0.9393 0.9483 0.0252 0.923114 0.9424 0.0225 0.9199 0.942 0.0227 0.919316 0.9433 0.0481 0.8952 0.9471 0.0224 0.924818 0.9189 0.0996 0.8194 0.9457 0.0226 0.923120 0.9188 0.1236 0.7952 0.9419 0.0225 0.9195
ch TP FP FPTP TP FP FPTP
Visual imagery only Visual and Lidar fusion
Visual imagery only Visual and Lidar fusionTruth map

3D Object Modeling
Need for further optimization of 3D buildings Sparse depth maps obtained from stereo mosaics Height of each point quantized into levels defined by
the view angle of the fixed line used for building the stereo mosaics
Project initial 3D models on to individual video frames
Minimize the distance between the projected corners of the building and the actual corners detected in the 2D images
04/19/23Prudhvi Gurram, Research Seminar
55

04/19/23Prudhvi Gurram, Research Seminar
56
Initial estimate of orthorectified, georeferenced 3D corners
Project initial 3D corners on to individual video frames in which the building is visible
Find corresponding point pairs between projected 3D corners and 2D corners in individual video frames
Optimize the 3D position of corners in object space to reduce the sum of squared distances between each corner’s
projected 2D coordinates and the actual 2D coordinates of the points in the video frames (nonlinear least squares
problem - Levenberg-Marquardt algorithm)
Fit a RANSAC least squares plane through the optimized 3D corners of the surface to remove outliers due to bad point
pairs
Recalculate the accurate 3D positions of the corners using the plane equation
Over all surfaces
For each surface s
Combine all the corners of adjacent surfaces with common edges by applying appropriate constraints to build accurate
3D model of the building
),,( ZYX
Projected 3D corners
Initial 3D corners
)ˆ,ˆ( yx
Actual 2D corners
),( yx
1
|ˆ
ˆ
33 Z
Y
X
TIKR
k
yk
xk
N
iiiii
ZYXyyxx
1
22
),,()ˆ()ˆ(min

Results – 3D Object Modeling
04/19/23Prudhvi Gurram, Research Seminar
57
Building surfaces identified by Bayesian Network
Surfaces belonging to a single building identified using connected
components

Summary and Conclusions
Automatically built stereo mosaics from video frames over large scenes using ray interpolation
Automatically identified 3D objects like buildings and trees in the scene using features from stereo mosaics
Improved the accuracy of 3D object identification and modeling by fusing Lidar data with visual imagery
Accurately modeled 3D buildings in the scene In summary, an automated system has been designed to
model 3D buildings from aerial video
04/19/23Prudhvi Gurram, Research Seminar
58

Original Contributions
04/19/23Prudhvi Gurram, Research Seminar
59
A segment-based mesh design for aerial triangulation without any prior 3D knowledge of the scene has been developed This new design helps in avoiding visual artifacts in the parallel-perspective stereo mosaics
that are built using ray interpolation Consequently, the errors in the final 3D models of buildings are reduced Publication: P. Gurram, E. Saber, and H. Rhody, “Segment-based Mesh Design for Building
Parallel-Perspective Stereo Mosaics”, Accepted for publication in IEEE Transactions on Geoscience and Remote Sensing
A novel method to set the input parameters of vision algorithms like color segmentation using the data-driven probabilistic inference in Bayesian networks has been designed This method automates the 3D object identification process and precludes the need for
manual intervention to set the accurate input parameters for best quality of the final 3D building models
Publication: P. Gurram, E. Saber, and H. Rhody, “An Automated System for Modeling 3D Buildings from Aerial Video”, to be submitted to ASPRS Photogrammetric Engineering and Remote Sensing Journal

Future Work
Structural learning of Bayesian Networks Design of hierarchical Bayesian Networks Fusion of Lidar data with visual imagery
during 3D modeling step
04/19/23Prudhvi Gurram, Research Seminar
60

Acknowledgements
Dr. Eli Saber, RIT Dr. Harvey Rhody, RIT Dr. Ferat Sahin, RIT Major Steve Lach, USAF Jason Faulring, LIAS, RIT Matthew Montanaro Archana Devasia Mustafa Jaber04/19/23
Prudhvi Gurram, Research Seminar61