
ATA’s TA’s NanoradianNanoradian--ClassClass Rotational...
17
ATA’s ATA’s Nanoradian Nanoradian-Class Class Rotational Sensors Rotational Sensors Rotational Sensors Rotational Sensors October 2010 October 2010 WARNING Thi d t ti it t d t if ti f A T h C ti U th i d di l i t i tl hibit d d lt i i l l Thi if ti h ll t WARNING: This document contains proprietary or trade secret information of A-Tech Corporation. Unauthorized disclosure isstrictly prohibited and may result in serious legal consequences. This information shall not be published, copied in whole or in part, or used for any purpose without written permission of A-Tech Corporation. ITAR CONTROLLED This product is subject to U.S. Government approval for all hardware export licenses, end-user certificates and technical assistance agreements as required in accordance with the U.S. Government International Traffic in Arms Regulations (ITAR). Regulation requirements can be found in Subchapter M, Title 22, Code of Federal Regulations, Parts 120 through 130 (22 CFR 120-130). © 2010 by A-Tech Corporation. All rights reserved. 10B1478
Transcript of ATA’s TA’s NanoradianNanoradian--ClassClass Rotational...
ATA’s ATA’s NanoradianNanoradian--ClassClassRotational SensorsRotational SensorsRotational SensorsRotational Sensors
October 2010October 2010
WARNING Thi d t t i i t t d t i f ti f A T h C ti U th i d di l i t i tl hibit d d lt i i l l Thi i f ti h ll tWARNING: This document contains proprietary or trade secret information of A-Tech Corporation. Unauthorized disclosure is strictly prohibited and may result in serious legal consequences. This information shall notbe published, copied in whole or in part, or used for any purpose without written permission of A-Tech Corporation.
ITAR CONTROLLEDThis product is subject to U.S. Government approval for all hardware export licenses, end-user certificates and technical assistance agreements as required in accordance with the U.S. Government International Traffic in Arms Regulations (ITAR). Regulation requirements can be found in Subchapter M, Title 22, Code of Federal Regulations, Parts 120 through 130 (22 CFR 120-130).
© 2010 by A-Tech Corporation. All rights reserved.
10B1478
About ATAAbout ATA
Successful Small BusinessSuccessful Small Business– Founded in 1975– ~250 Employees– Multiple National Small Business u p e a o a S a us ess
Awards– ISO 9001:2008 Certified– Approved Aerospace Vendor
ATA’s driving force is – Space-Qualified Hardware
Operating Sites in New MexicoAlbuquerque (HQ)
ATA s driving force is Technology / Know-How
Proactively Leverage Our Leading-Edge – Albuquerque (HQ)– Kirtland AFB Satellite I&T Facilities– WSMR Test Facilities
Proactively Leverage Our Leading Edge Precision Sensing, Measurement and
Controls Application Know-How into Viable Custom Solutions, Services and Tests
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 2
ATA is a Proven Technology Company for Challenging Problems

ATA Overview Cont’dATA Overview Cont’d
• ISO 9001 Certified• Class 10,000 Clean Room• Approved Vendor
Ball Aerospace– Ball Aerospace– Lockheed Martin– Boeing
R thR th – Raytheon• Produced Space Qualified
Hardware
Raytheon
– Lockheed Martin– Boeing– Raytheon
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 3
– Sandia National Laboratories

Overview Overview
• ATA has a History of Inventing Precision Angular Inertial Sensors in Response to Customer Requests or Internally Identified Needs
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 4
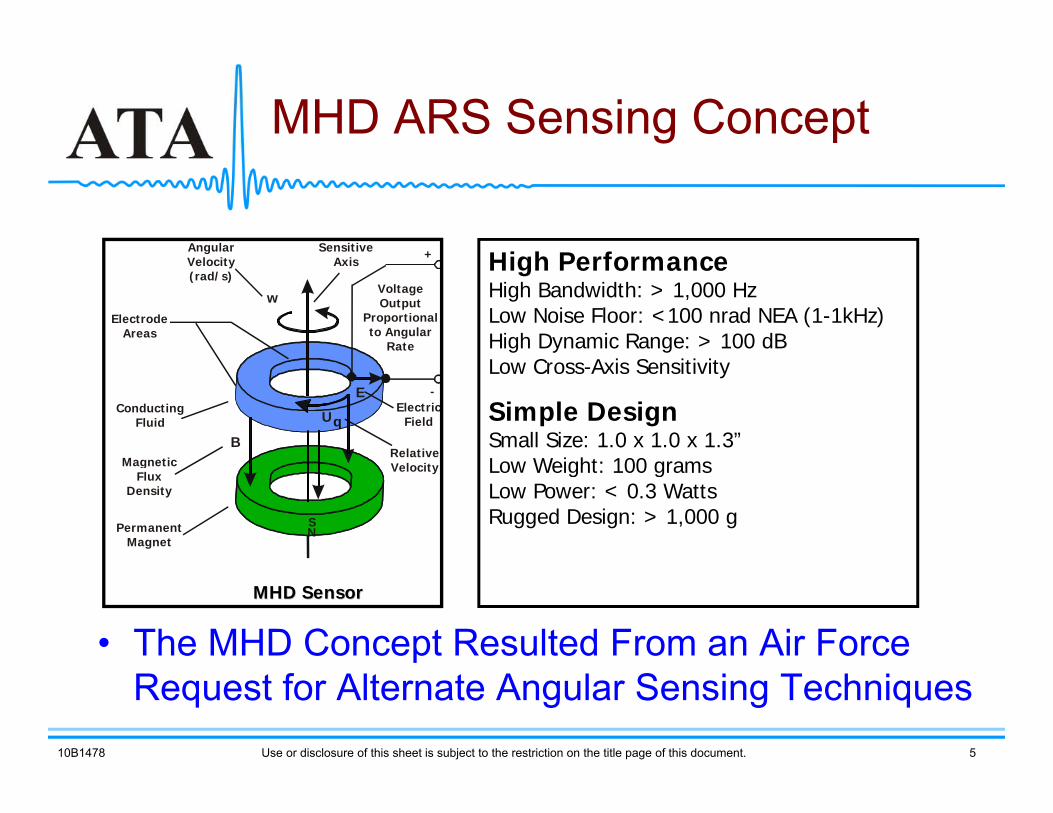
MHD ARS Sensing Concept
Angular Sensitive + Hi h P fg
Velocity(rad/s)
Axis
ElectrodeAreas
VoltageOutput
Proportionalto Angular
Rate
w
+ High PerformanceHigh Bandwidth: > 1,000 HzLow Noise Floor: <100 nrad NEA (1-1kHz)High Dynamic Range: > 100 dB
ElectricField
Relative
ConductingFluid
M tiB
E -
Uq
Low Cross-Axis Sensitivity
Simple DesignSmall Size: 1.0 x 1.0 x 1.3”L W i ht 100VelocityMagnetic
FluxDensity
PermanentMagnet
SN
Low Weight: 100 gramsLow Power: < 0.3 WattsRugged Design: > 1,000 g
• The MHD Concept Resulted From an Air Force MHD SensorMHD Sensor
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 5
Request for Alternate Angular Sensing Techniques
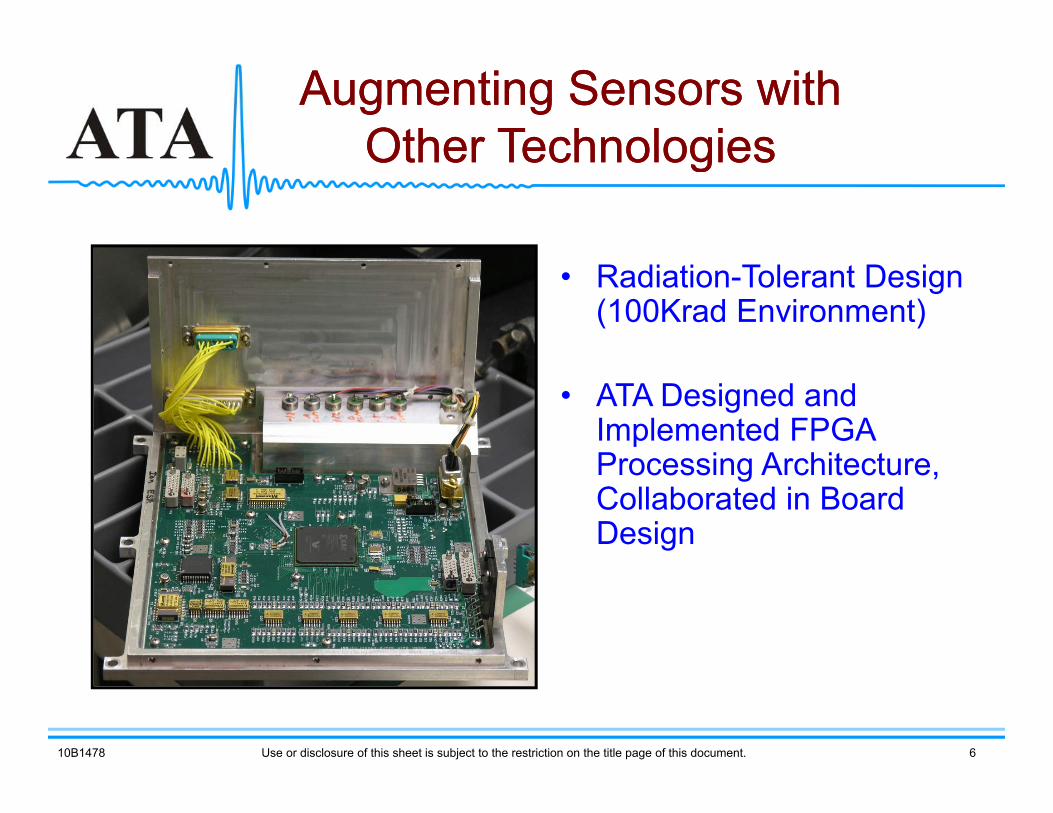
Augmenting Sensors with Augmenting Sensors with Other TechnologiesOther TechnologiesOther TechnologiesOther Technologies
• Radiation-Tolerant Design (100Krad Environment)
• ATA Designed and Implemented FPGA P i A hit tProcessing Architecture, Collaborated in Board Design
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 6
MicroradianMicroradian--Class Testing Class Testing
ATA h D l d T t F iliti d T h i• ATA has Developed Test Facilities and Techniques Suitable for High Precision Motion Testing
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 7
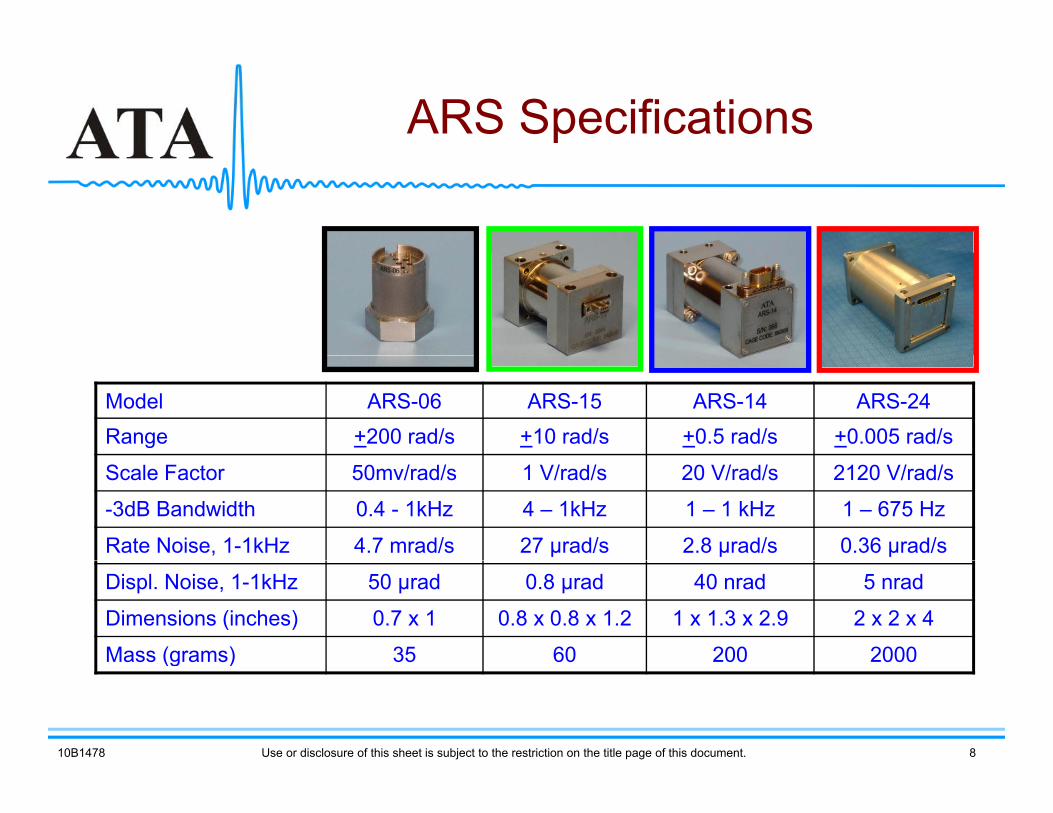
ARS Specifications
Model ARS-06 ARS-15 ARS-14 ARS-24Range +200 rad/s +10 rad/s +0.5 rad/s +0.005 rad/s
Scale Factor 50mv/rad/s 1 V/rad/s 20 V/rad/s 2120 V/rad/s
-3dB Bandwidth 0.4 - 1kHz 4 – 1kHz 1 – 1 kHz 1 – 675 Hz
Rate Noise, 1-1kHz 4.7 mrad/s 27 μrad/s 2.8 μrad/s 0.36 μrad/s
Displ. Noise, 1-1kHz 50 μrad 0.8 μrad 40 nrad 5 nrad
Dimensions (inches) 0.7 x 1 0.8 x 0.8 x 1.2 1 x 1.3 x 2.9 2 x 2 x 4
Mass (grams) 35 60 200 2000
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 8
(g )
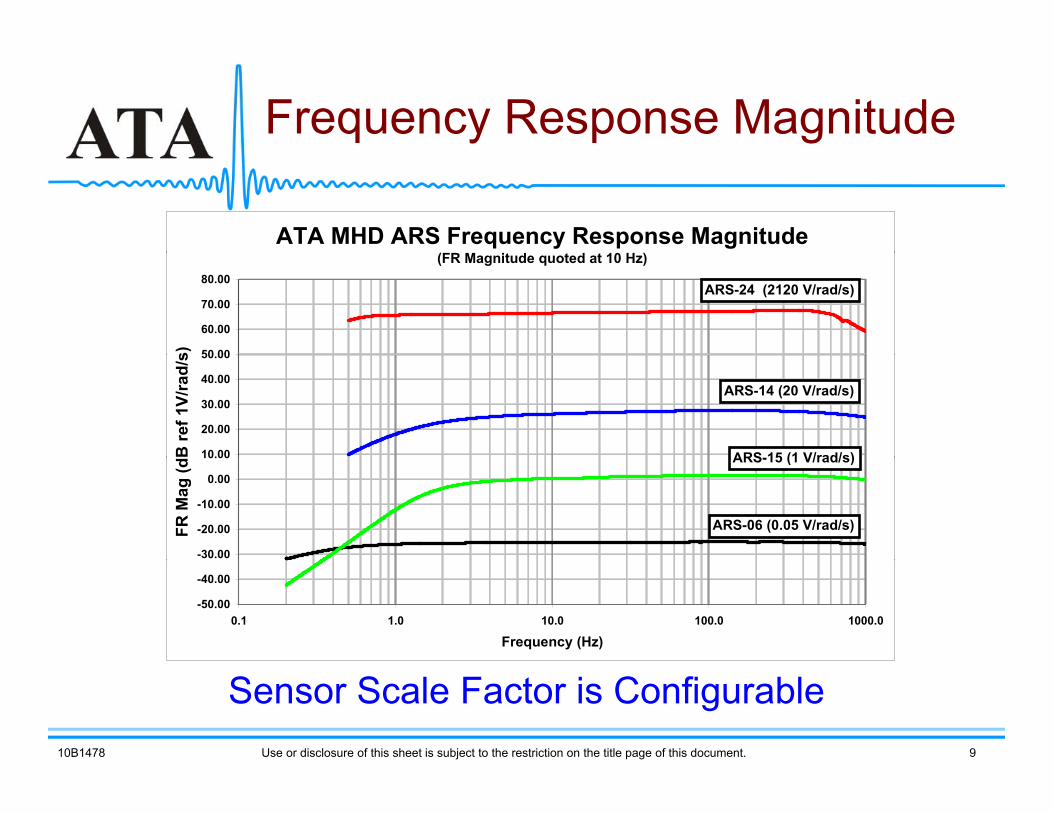
Frequency Response Magnitude
ATA MHD ARS Frequency Response Magnitude(FR M i d d 10 H )(FR Magnitude quoted at 10 Hz)
50 00
60.00
70.00
80.00
s)
ARS-24 (2120 V/rad/s)
10.00
20.00
30.00
40.00
50.00
B re
f 1V/
rad/
s
ARS-15 (1 V/rad/s)
ARS-14 (20 V/rad/s)
-30.00
-20.00
-10.00
0.00
10.00
FR M
ag (d
ARS-06 (0.05 V/rad/s)
ARS-15 (1 V/rad/s)
-50.00
-40.00
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 9
Sensor Scale Factor is Configurable
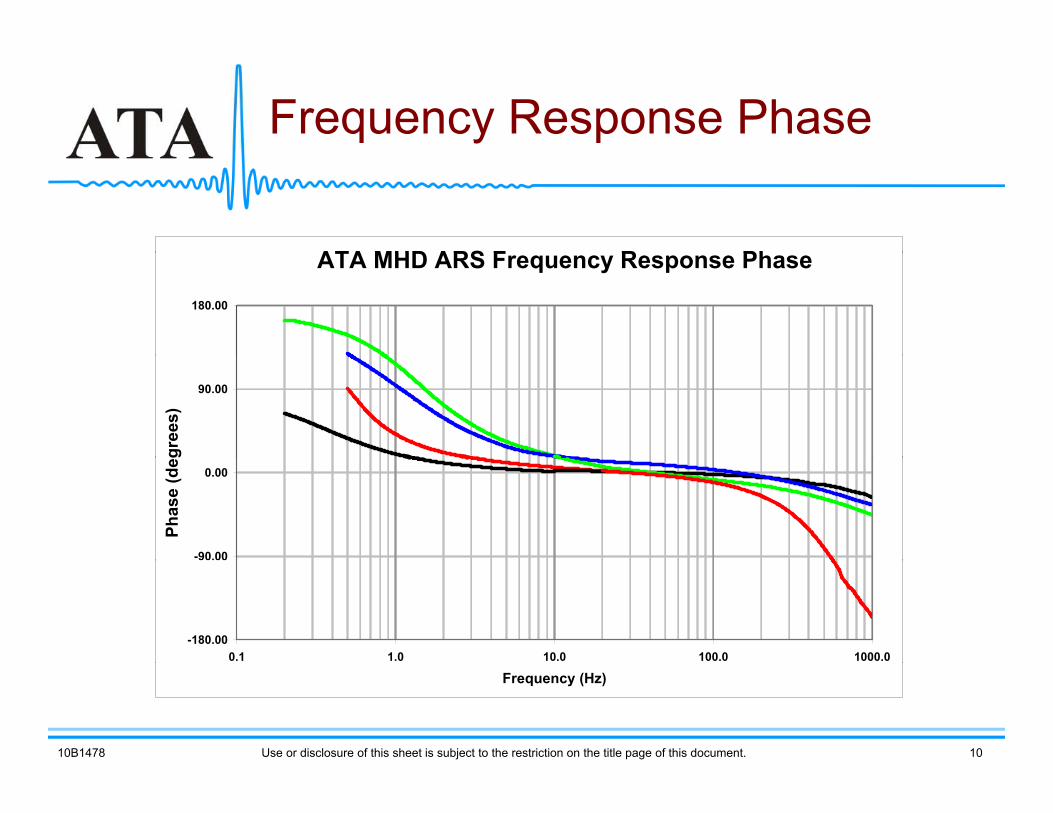
Frequency Response Phase
ATA MHD ARS F R PhATA MHD ARS Frequency Response Phase180.00
90.00
gree
s)
-90.00
0.00
Phas
e (d
e
-180.000.1 1.0 10.0 100.0 1000.0
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 10
Frequency (Hz)
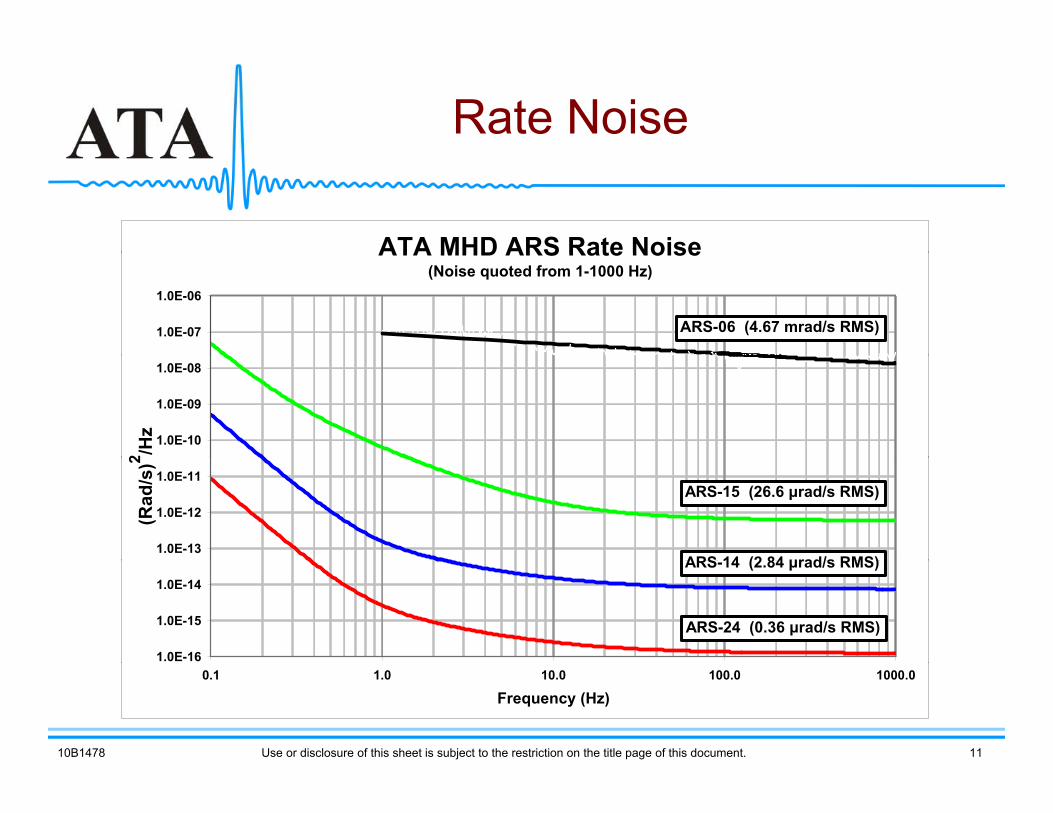
Rate Noise
ATA MHD ARS Rate NoiseATA MHD ARS Rate Noise(Noise quoted from 1-1000 Hz)
1.0E-07
1.0E-06
ARS-06 (4.67 mrad/s RMS)
1.0E-10
1.0E-09
1.0E-08
2 /Hz
1.0E-13
1.0E-12
1.0E-11
(Rad
/s)2
ARS-15 (26.6 μrad/s RMS)
ARS 14 (2 84 μrad/s RMS)
1.0E-16
1.0E-15
1.0E-14ARS-14 (2.84 μrad/s RMS)
ARS-24 (0.36 μrad/s RMS)
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 11
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
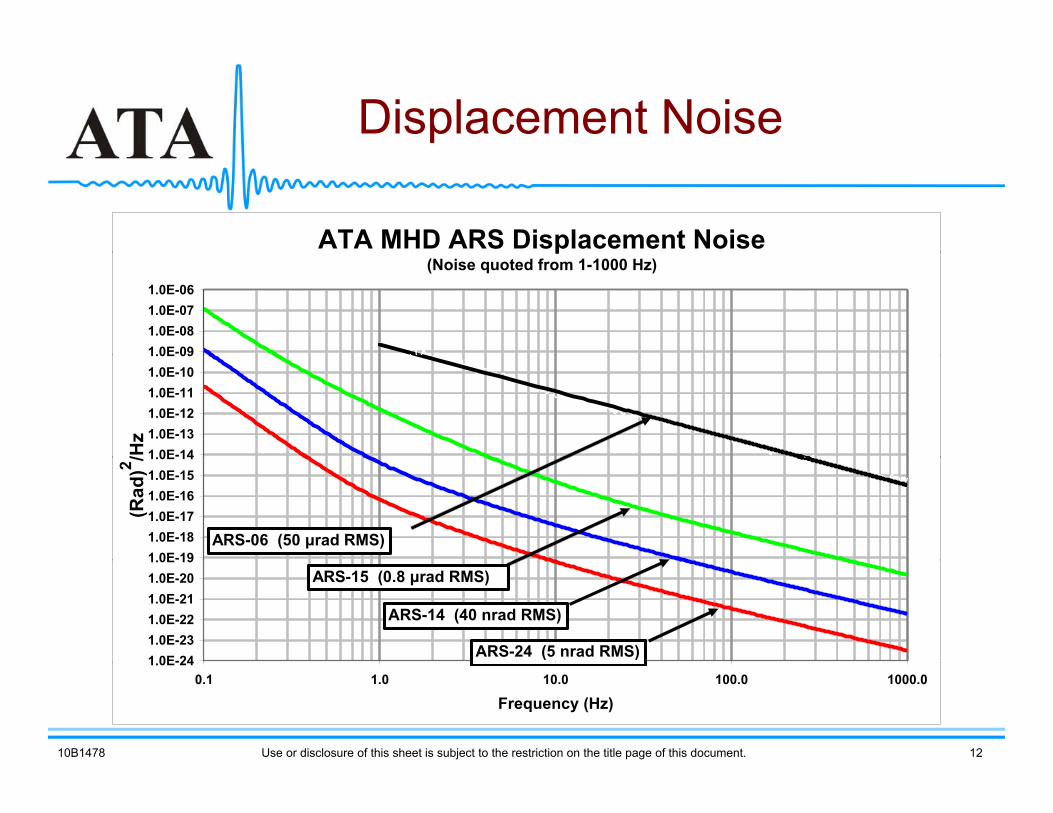
Displacement Noise
ATA MHD ARS Displacement Noisep(Noise quoted from 1-1000 Hz)
1.0E-091.0E-081.0E-071.0E-06
1.0E-141.0E-131.0E-121.0E-111.0E-101.0E 09
/Hz
1.0E-191.0E-181.0E-171.0E-161.0E-151.0E 14
(Rad
)2 /
ARS-06 (50 μrad RMS)
1 0E-241.0E-231.0E-221.0E-211.0E-201.0E 19
ARS-15 (0.8 μrad RMS)
ARS-14 (40 nrad RMS)
ARS-24 (5 nrad RMS)
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 12
1.0E 240.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
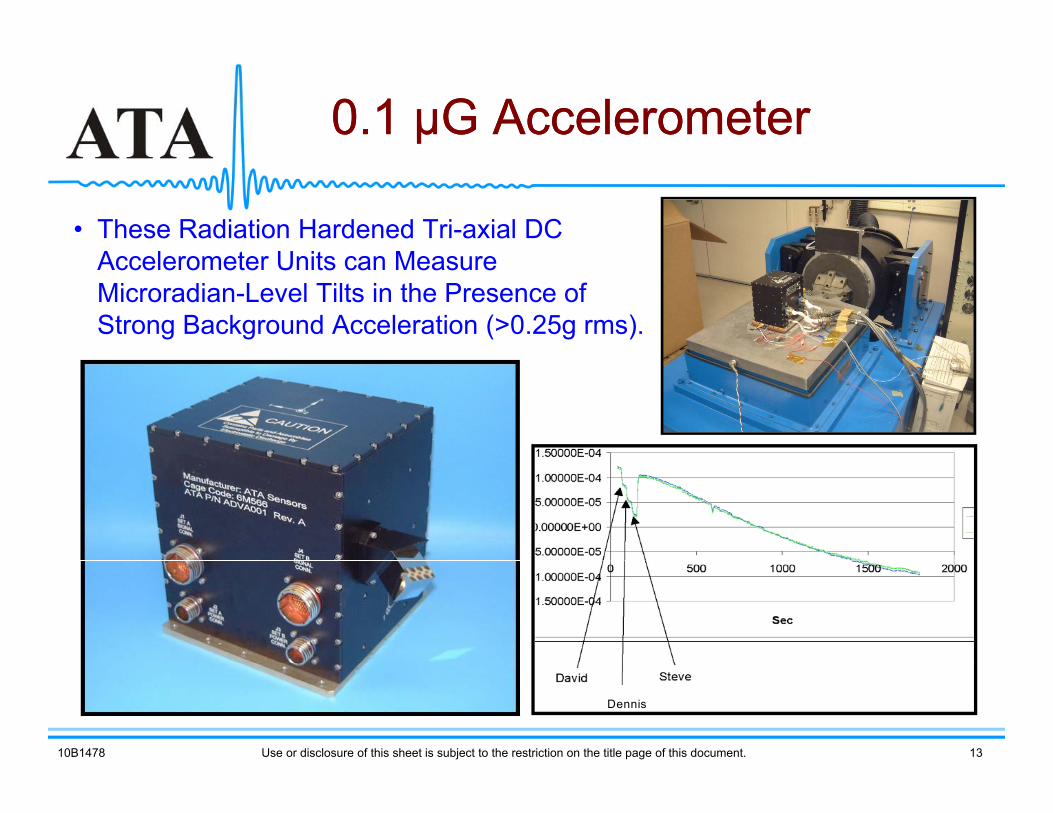
0.1 0.1 μμG AccelerometerG Accelerometer
• These Radiation Hardened Tri-axial DC A l t U it MAccelerometer Units can Measure Microradian-Level Tilts in the Presence of Strong Background Acceleration (>0.25g rms).
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 13
Dennis
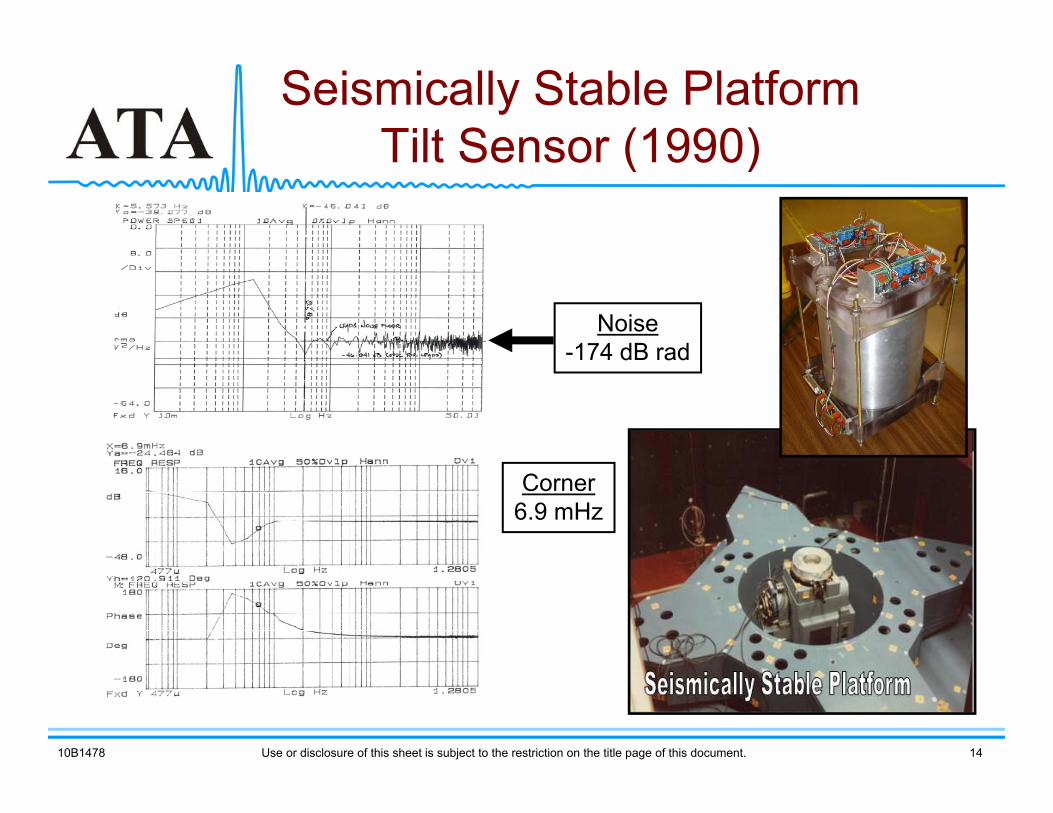
Seismically Stable Platform Tilt Sensor (1990)Tilt Sensor (1990)
Noise-174 dB rad174 dB rad
Corner6.9 mHz
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 14
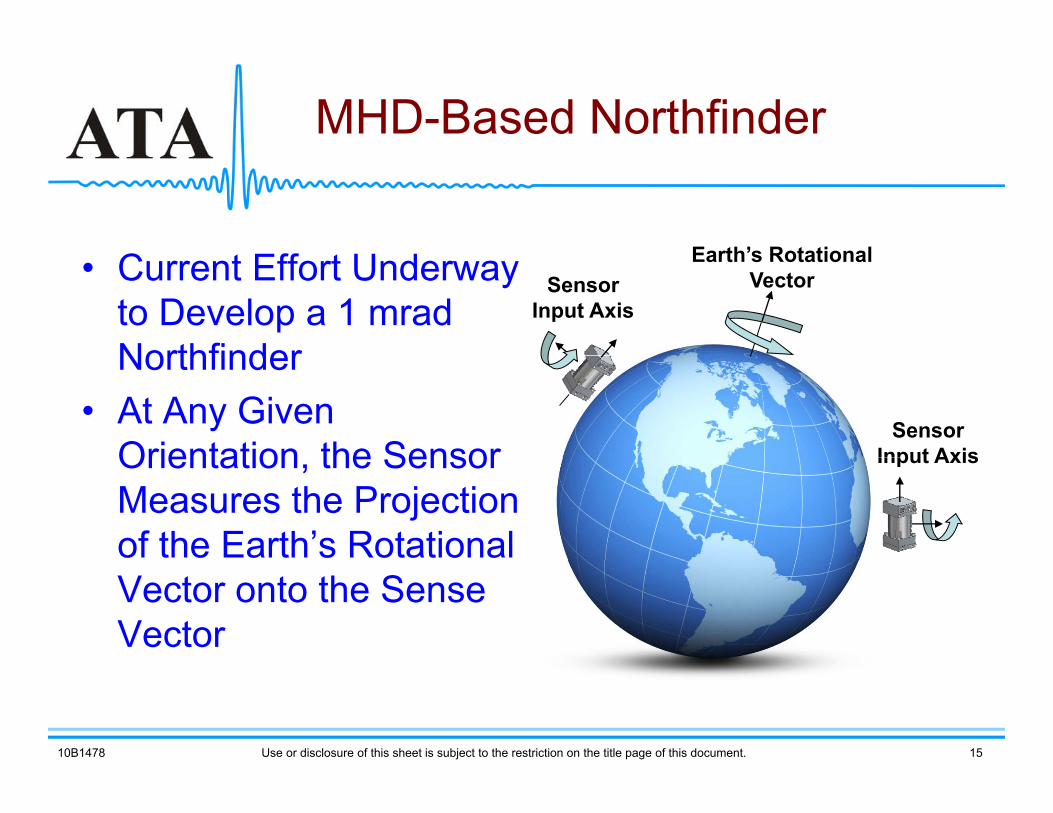
MHD-Based Northfinder
Earth’s Rotational• Current Effort Underway to Develop a 1 mrad Northfinder
Earth’s Rotational VectorSensor
Input Axis
Northfinder• At Any Given
Orientation the SensorSensor
Input AxisOrientation, the Sensor Measures the Projection of the Earth’s Rotational
Input Axis
Vector onto the Sense Vector
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 15
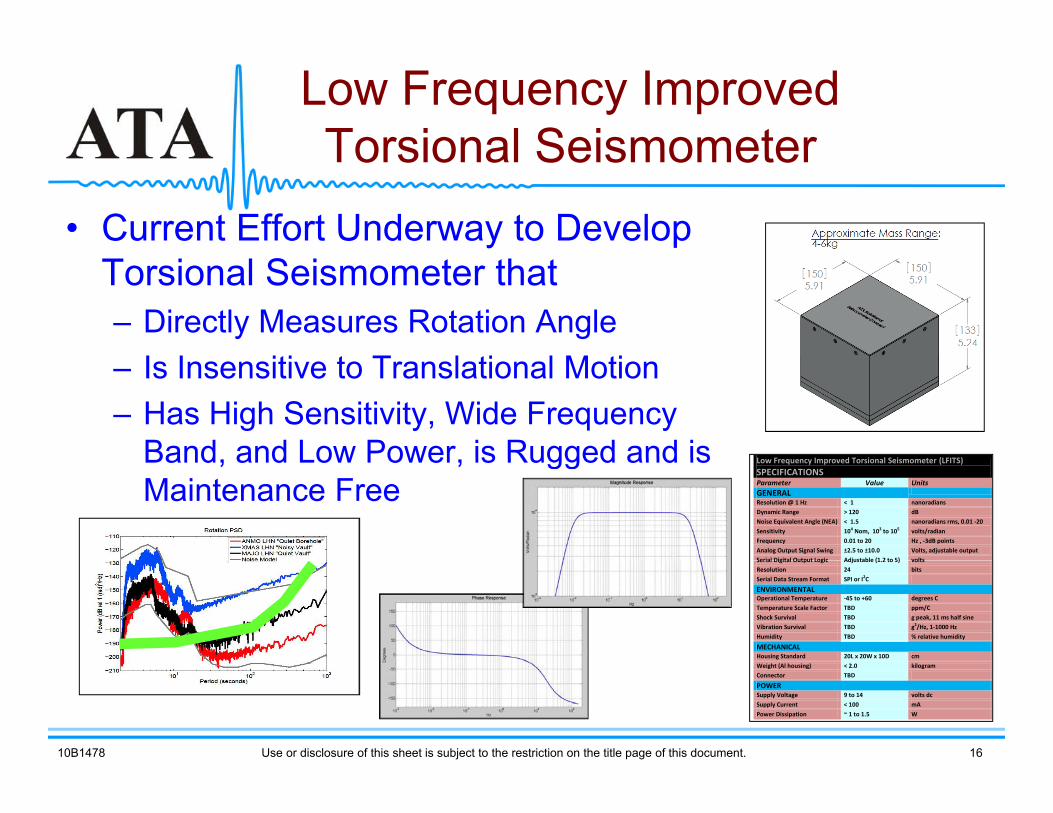
Low Frequency Improved Torsional SeismometerTorsional Seismometer
• Current Effort Underway to Develop Torsional Seismometer that– Directly Measures Rotation Angle
I I i i T l i l M i– Is Insensitive to Translational Motion– Has High Sensitivity, Wide Frequency
Band and Low Power is Rugged and is L F I d T i l S i t (LFITS)Band, and Low Power, is Rugged and is Maintenance Free
Low Frequency Improved Torsional Seismometer (LFITS) SPECIFICATIONS Parameter Value UnitsGENERALResolution @ 1 Hz < 1 nanoradians Dynamic Range > 120 dB Noise Equivalent Angle (NEA) < 1.5 nanoradians rms, 0.01 ‐20 Sensitivity 104 Nom, 103 to 105 volts/radian Frequency 0.01 to 20 Hz , ‐3dB points Analog Output Signal Swing ±2.5 to ±10.0 Volts, adjustable output Serial Digital Output Logic Adjustable (1 2 to 5) voltsSerial Digital Output Logic Adjustable (1.2 to 5) volts Resolution 24 bits Serial Data Stream Format SPI or I2C
ENVIRONMENTAL Operational Temperature ‐45 to +60 degrees C Temperature Scale Factor TBD ppm/C Shock Survival TBD g peak, 11 ms half sine Vibration Survival TBD g2/Hz, 1‐1000 Hz Humidity TBD % relative humidity
MECHANICAL Housing Standard 20L x 20W x 10D cm
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 16
Weight (Al housing) < 2.0 kilogram Connector TBD
POWER Supply Voltage 9 to 14 volts dc Supply Current < 100 mA Power Dissipation ~ 1 to 1.5 W
Applied Technology AssociatesApplied Technology AssociatesApplied Technology AssociatesApplied Technology Associates
For additional information, contact:Larry Lloyd, Director of Business Development
(505) 767-1200, [email protected]
10B1478 Use or disclosure of this sheet is subject to the restriction on the title page of this document. 17


















