Artificial intelligence heuristics in solving vehicle routing problems with time window constraints
13
Engineering Applications of Artificial Intelligence 14 (2001) 825–837 Artificial intelligence heuristics in solving vehicle routing problems with time window constraints K.C. Tan a, *, L.H. Lee b , K. Ou a a Department of Electrical and Computer Engineering, National University of Singapore, 4 Engineering Drive 3, 10 Kent Ridge Crescent, Singapore 119260 b Department of Industrial and Systems Engineering, National University of Singapore, 10 Kent Ridge Crescent, Singapore 119260 Abstract This paper describes the authors’ research on various heuristics in solving vehicle routing problem with time window constraints (VRPTW) to near optimal solutions. VRPTW is NP-hard problem and best solved to near optimum by heuristics. In the vehicle routing problem, a set of geographically dispersed customers with known demands and predefined time windows are to be served by a fleet of vehicles with limited capacity. The optimized routines for each vehicle are scheduled as to achieve the minimal total cost without violating the capacity and time window constraints. In this paper, we explore different hybridizations of artificial intelligence based techniques including simulated annealing, tabu search and genetic algorithm for better performance in VRPTW. All the implemented hybrid heuristics are applied to solve the Solomon’s 56 VRPTW with 100-customer instances, and yield 23 solutions competitive to the best solutions published in literature according to the authors’ best knowledge. r 2002 Elsevier Science Ltd. All rights reserved. Keywords: Artificial intelligence; Vehicle routing problems with time windows; Simulated annealing; Tabu search; Genetic algorithms 1. Introduction The vehicle routing problem with time window constraints (VRPTW) arises in a wide range of practical decision making problems, such as school bus routing, mail, newspaper delivery, fuel oil delivery and municipal waste collection. The VRPTW problem addressed in this paper belongs to the operational level in logistical decisions as classified by Hax and Candea (1984), which involves routing a fleet of vehicles, with limited capacities, from a central depot to a set of geographi- cally dispersed customers with known demands and predefined time window constraints. The route cost of a vehicle is the total distance it travels, and the objective is to minimize the total cost of all routes with minimum number of vehicles without violating any constraints. Efficient routing and scheduling of vehicles can save millions of dollars for government and industries. Surveys on classifications and applications of VRPTW can be found in Osman (1993a), Laporte (1992), Fisher (1993) and Bodin et al. (1983). It has been shown previously that finding a feasible solution for the traveling salesman problem (TSP), the simplest problem in vehicle routing, is an NP-complete problem. Therefore, solving the problem of VRPTW is more complicated since it involves serving many customers using multiple vehicles. Although optimal solutions to VRPTW can be obtained using exact methods, the computational time required to solve the VRPTW to optimality is prohibitive (Desrochers et al., 1992). Since heuristic methods often produce near optimal solutions in a reasonable amount of computational time, there are many researches currently working on the design of new heuristics for solving the VRPTW. A great amount of work has been done to the development of heuristics for VRPTW. For example, Christofides (1985), Fisher (1995), Federgruen and Simchi-Levi (1995), Bertsimas and Simichi-Levi (1996), Kontoravdis and Bard (1994), Kohl and Madsen (1997), Kohl et al. (1999), Thompson and Psaraftis (1993) or Kolen et al. (1987). These heuristics can be classified into four categories by Christofides’s definition: Constructive methods, route first-cluster second method, cluster first- route second methods and incomplete optimization methods. The saving algorithm (1964), heuristics of *Corresponding author. Tel.: +65-874-2127; fax: +65-779-1103. E-mail addresses: [email protected] (K.C. Tan), [email protected] (L.H. Lee), [email protected] (K. Ou). 0952-1976/02/$ - see front matter r 2002 Elsevier Science Ltd. All rights reserved. PII:S0952-1976(02)00011-8
Transcript of Artificial intelligence heuristics in solving vehicle routing problems with time window constraints

Engineering Applications of Artificial Intelligence 14 (2001) 825–837
Artificial intelligence heuristics in solving vehicle routing problemswith time window constraints
K.C. Tana,*, L.H. Leeb, K. Oua
aDepartment of Electrical and Computer Engineering, National University of Singapore, 4 Engineering Drive 3, 10 Kent Ridge Crescent,
Singapore 119260bDepartment of Industrial and Systems Engineering, National University of Singapore, 10 Kent Ridge Crescent, Singapore 119260
Abstract
This paper describes the authors’ research on various heuristics in solving vehicle routing problem with time window constraints
(VRPTW) to near optimal solutions. VRPTW is NP-hard problem and best solved to near optimum by heuristics. In the vehicle
routing problem, a set of geographically dispersed customers with known demands and predefined time windows are to be served by
a fleet of vehicles with limited capacity. The optimized routines for each vehicle are scheduled as to achieve the minimal total cost
without violating the capacity and time window constraints. In this paper, we explore different hybridizations of artificial
intelligence based techniques including simulated annealing, tabu search and genetic algorithm for better performance in VRPTW.
All the implemented hybrid heuristics are applied to solve the Solomon’s 56 VRPTW with 100-customer instances, and yield 23
solutions competitive to the best solutions published in literature according to the authors’ best knowledge. r 2002 Elsevier Science
Ltd. All rights reserved.
Keywords: Artificial intelligence; Vehicle routing problems with time windows; Simulated annealing; Tabu search; Genetic algorithms
1. Introduction
The vehicle routing problem with time windowconstraints (VRPTW) arises in a wide range of practicaldecision making problems, such as school bus routing,mail, newspaper delivery, fuel oil delivery and municipalwaste collection. The VRPTW problem addressed in thispaper belongs to the operational level in logisticaldecisions as classified by Hax and Candea (1984), whichinvolves routing a fleet of vehicles, with limitedcapacities, from a central depot to a set of geographi-cally dispersed customers with known demands andpredefined time window constraints. The route cost of avehicle is the total distance it travels, and the objective isto minimize the total cost of all routes with minimumnumber of vehicles without violating any constraints.Efficient routing and scheduling of vehicles can savemillions of dollars for government and industries.Surveys on classifications and applications of VRPTWcan be found in Osman (1993a), Laporte (1992), Fisher(1993) and Bodin et al. (1983).
It has been shown previously that finding a feasiblesolution for the traveling salesman problem (TSP), thesimplest problem in vehicle routing, is an NP-completeproblem. Therefore, solving the problem of VRPTWis more complicated since it involves serving manycustomers using multiple vehicles. Although optimalsolutions to VRPTW can be obtained using exactmethods, the computational time required to solvethe VRPTW to optimality is prohibitive (Desrocherset al., 1992). Since heuristic methods often producenear optimal solutions in a reasonable amount ofcomputational time, there are many researches currentlyworking on the design of new heuristics for solving theVRPTW.A great amount of work has been done to the
development of heuristics for VRPTW. For example,Christofides (1985), Fisher (1995), Federgruen andSimchi-Levi (1995), Bertsimas and Simichi-Levi (1996),Kontoravdis and Bard (1994), Kohl and Madsen (1997),Kohl et al. (1999), Thompson and Psaraftis (1993) orKolen et al. (1987). These heuristics can be classified intofour categories by Christofides’s definition: Constructivemethods, route first-cluster second method, cluster first-route second methods and incomplete optimizationmethods. The saving algorithm (1964), heuristics of
*Corresponding author. Tel.: +65-874-2127; fax: +65-779-1103.
E-mail addresses: [email protected] (K.C. Tan),
[email protected] (L.H. Lee), [email protected] (K. Ou).
0952-1976/02/$ - see front matter r 2002 Elsevier Science Ltd. All rights reserved.
PII: S 0 9 5 2 - 1 9 7 6 ( 0 2 ) 0 0 0 1 1 - 8

Gaskel (1967), Yellow (1970) and Russel (1977) fall intothe class of the constructive methods. The optimalpartitioning heuristic (Beasley, 1983) and the sweepalgorithm (Gillett and Miller, 1974) belong to the classof route first-cluster second methods. There are threealgorithms for the cluster first-route second methods,which includes the two-phase method (Christofides et al.,1978), the generalized assignment heuristic (Fisher andJaikumar, 1981) and the location-based heuristic (Bra-mel and Simchi-Levi, 1995). For the last category, itincludes the method of cutting plane methods (Cornu-!ejols and Harche, 1993) and minimum K-tree methods(Fisher, 1994).All the above algorithms are capable of giving feasible
solutions for VRPTW, but the solutions produced maynot be satisfactory because of their limited ability ofsearching the solution space. Heuristics search strategiesbased on genetic algorithm (GA), simulated annealing(SA) and tabu search (TS) (artificial intelligence (AI)based algorithms) have been explored in recent years inorder to improve the solutions in VRPTW, e.g., theworks of Garcia et al. (1994), Potvin and Bengio (1996)on TS, Thangiah and Petrovic (1998), Thangiah et al.(1996) on GA and Thangiah (1999) on hybrid algo-rithms. All these AI-based algorithms can help to obtainbetter solutions for VRPTW by exploring much largersolution space. The work of Osman (1993b) in using SAand TS for VRPTW show that customer interchangemethods guided by SA and TS produce solutions thatare significantly better than solutions obtained bycompeting heuristic methods. Heuristic search strategiesbased on GA (Thangiah and Nygard, 1992; Thangiahet al., 1993) were also proved to give good solutions forVRPTW.In this paper, we investigate the use of customer
interchange method to improve solutions using local
search algorithm as well as hybrid SA and TS. HybridGA and local search method is also proposed in thepaper to solve the representation problem in standardGA. For all these heuristics, the initial solution ofVRPTW is obtained from push forward insertionheuristic (PFIH), which is a straightforward andconstructive algorithm to obtain initial solutions (Solo-mon, 1987). The paper is arranged as follows: Section 2gives a mathematical formulation of the VRPTW.Section 3 introduces the PFIH, l-interchange localsearch method, and local search with diversification.Section 4 describes the hybridization of TS and SAheuristics for VRPTW. Hybrid GA with local searchtechnique is presented in Section 5. The overallcomputational results are listed and described inSection 6. Conclusions and future works are drawn inSection 7.
2. Mathematical formulation
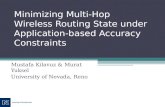
This section describes the notation and features thatare common throughout the paper. Our formulation isbased on the VRPTW model as shown in Fig. 1.The VRPTW consists of a set of identical vehicles, a
central depot node, a set of customer nodes and anetwork connecting the depot and customers. It isassumed that there are N þ 1 customers,CAf0; 1; 2;y;Ng and K vehicles, VAf1; 2;y;Kg:Conveniently, the depot node is denoted as customer0. Each arc in the network represents a connectionbetween two nodes and also indicating the direction ittravels. Each route starts from depot, visits customernodes and then returns to depot. The number of routesin the network is equal to the number of vehicles used.One vehicle is dedicated to one route. A cost cij and a
6
3
9
2
7
4
5
8
1
Depot
Fig. 1. Model of VRPTW.
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837826

travel time tij are associated with each arc of thenetwork.In Solomon’s 56 VRPTW 100-customer instances, all
distances are represented by Euclidean distance, and thespeed of all vehicles is assumed to be unity. That is, ittakes one unit of time to travel one unit of distance. Thisassumption makes the problem simpler, because nu-merically the travel cost cij ; the travel time tij and theEuclidean distance between the customer nodes equal toeach other.Each customer in the network can be visited only once
by one of the vehicles. Every vehicle has the samecapacity qk and each customer has a varying demand mi:qk must be greater or equal to the summation of alldemands on the route traveled by vehicle k; whichmeans that no vehicles can be overloaded. The timewindow constraint is denoted by a predefined timeinterval, given an earliest arrival time and latest arrivaltime. The vehicles must arrive at the customers not laterthan the latest arrival time, while arrive earlier than theearliest arrival time, waiting occurs. Each customer alsoimposes a service time to the route, taking considerationof the loading/unloading time of goods. In Solomon’sinstances, the service time is assumed to be uniqueregardless of the load quantity needed to be handled.Vehicles are also supposed to complete their individualroutes within a total route time, which is essentially thetime window of the depot.There are three types of decision variables in
VRPTW. The decision variable xijkði; jAf0; 1; 2;y;Ng;kAf1; 2;y;Kg; iaj) is 1 if vehicle k travels fromcustomer i to customer j; and 0 otherwise. The decisionvariable ti denotes the time when a vehicle arrives at thecustomer. And wi denotes the waiting time at node i:The objective is to design a network which satisfies allconstraints, at the same time minimizing the total travelcost. The model is mathematically formulated below:
Decision Variables:ti arrival time at node i;wi wait time at node i;xijkA0; 1; 0 if there is no arc from nodes i to j; and 1otherwise. iaj: i; jA0; 1; 2;y;N:
Parameters:K total number of vehicles,N total number of customers,Ci customer i; where iA1; 2;y;N ;C0 central depot,yi any arbitrary real number,dij Euclidean distance between node i and node j;cij cost incurred on arc from node i to j;tij travel time between node i and j;mi demand at node i;qk capacity of vehicle k;ei earliest arrival time at node i;
li latest arrival time at node i;fi service time at node i;rk maximum route time allowed for vehicle k;minimize
XN
i¼0
XN
j¼0
XK
k¼1
cijxijk ð2:1Þ
subject to:
XK
k¼1
XN
j¼1
xijkpK for i ¼ 0; ð2:2Þ
XN
j¼1
xijk ¼XN
j¼1
xjikp1
for i ¼ 0 and kAf1;y;Kg; ð2:3Þ
XK
k¼1
XN
j¼0
xijk ¼ 1 for iAf1;y;Ng; ð2:4Þ
XK
k¼1
XN
i¼0
xijk ¼ 1 for jAf1;y;Ng; ð2:5Þ
XN
i¼0
mi
XN
j¼0
xijkpqk for kAf1;y;Kg; ð2:6Þ
XN
i¼0
XN
j¼0
xijkðtij þ fi þ wiÞprk for kAf1;y;Kg; ð2:7Þ
t0 ¼ w0 ¼ f0 ¼ 0; ð2:8Þ
XK
k¼1
XN
i¼0
xijkðti þ tij þ fi þ wiÞ ¼ tjfor jAf1;y;Ng;
ð2:9Þ
eipðti þ wiÞpli for iAf0;y;Ng: ð2:10Þ
Formula (2.1) is the objective function of the problem.Constraint (2.2) specifies that there are maximum K
routes going out of the depot. Eq. (2.3) makes sure everyroute starts and ends at the central depot. Eqs. (2.4) and(2.5) define that every customer node can be visited onlyonce by one vehicle. Eq. (2.6) is the capacity constraint.Eq. (2.7) is the maximum travel time constraint. Con-straints (2.8)–(2.10) define the time windows. Theseformulas completely specify the feasible solutions forVRPTW.
3. Local search methods
This section describes the route construction heuristicfor obtaining an initial solution of VRPTW, the PFIH,
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 827

and the l-Interchange mechanism to generate neighbor-ing solutions for improving the initial solution.
3.1. Push forward insertion heuristic (PFIH)
The PFIHs for inserting customers into a route for theVRPTW was introduced by Solomon (1987). It is anefficient method for computing the cost of inserting anew customer into the current route. The procedure iseasy and straightforward. The feasibility of inserting acustomer into a route is checked by inserting thecustomer between all the edges in the current routeand then select the edge that has the lowest additionalinsertion cost. The feasibility check examines all theconstraints including time windows and load capacity.Only feasible insertion will be accepted. When thecurrent route is full without accepting any newcustomer, PFIH will start a new route and repeat theprocedure until all the customers are routed. PFIHserves the role of constructing route configuration forVRPTW, which is an efficient method to obtain feasiblesolutions. Detailed information of PFIH is available inSolomon’s paper (1987).
3.2. l-interchange local search method
The l-Interchange local search method was intro-duced by Osman and Christofides (1994), which is usedto improve the solution by interchanging customersbetween sets of routes. Based on some successfullysolved problems (Osman, 1993a, b; Osman and Chris-tofides, 1994; Thangiah et al., 1994), the l-Interchangelocal search method has been shown to be an effectiveneighborhood searching algorithm.The local search procedure is conducted by inter-
changing customer nodes between routes. For a chosenpair of routes, the searching order for the customers tobe interchanged needs to be defined, either system-atically or randomly. In this paper we only consider thecases l ¼ 1 and l ¼ 2; which means that maximum twocustomer nodes may be interchanged between routes.Based on the number of l; totally eight interchangeoperators can be defined, i.e., (0, 1), (1, 0), (1, 1), (0, 2),(2, 0), (2, 1), (1, 2), (2, 2). The operator (1, 2) on a routepair (Rp;Rq) indicates a shift of two customers from Rq
to Rp and a shift of one customer from Rp to Rq: Theother operators are defined similarly. For a givenoperator, the customers are considered sequentiallyalong the routes. In both shift and interchange process,only improved solutions are accepted if the move resultsin the reduction of the total cost.There are two selection strategies proposed to select a
candidate solution:
(a) The first-best (FB) strategy will select the firstsolution S0 in NlðSÞ; the neighborhood of thecurrent solution that results in a decrease in cost;
(b) The global-best (GB) strategy will search allsolution S0 in NlðSÞ; and select the one which willresult in the maximum decrease in cost.
From the description above, it can be understoodintuitively that GB searches the solution neighborhoodmore thoroughly than FB, but needs longer time inprocess.
3.3. Local Search Method with Diversification
(LS-DIV)
Both of the above two selection strategies, e.g., GBand FB, are highly dependent upon the initial solution.They can only search very limited solution space in thevicinity of the initial solution and may get stuck in localoptima having no means to get out of it. In order toexplore larger solution space, a diversification mechan-ism is proposed in the local search method. When thelocal search method cannot produce any better solu-tions, it is believed that a local optimum has beenreached. The current solution will then be diversified byrandomly shifting and interchanging customers betweenrandomly selected routes. As a result, the currentsolution jumps to a random neighbor. After severaldiversification processes, the current solution jumps toa new initial point in the solution space, and thel-interchange local search method is applied again.The only constraint of the diversification mechanism
is that during the process only feasible moves will beaccepted regardless of whether they lead to worsesolutions or better solutions in terms of the total cost.The whole procedure is repeated, and there is nostopping criterion for this algorithm. It is generallybelieved that given enough time, this method can searchbig enough solution space and find near optimalsolutions. The steps of this algorithm are shown below:
Heuristic 1: Local Search with Diversification (LS-DIV)
LS-DIV-1: Obtain an initial solution from PFIH.LS-DIV-2: Use GB strategy to select the
best solution candidate S0:LS-DIV-3: If {CðS0ÞoCðSÞ}then
accept S0 and branch to LS-DIV-2.ElseBranch to LS-DIV-4.
LS-DIV-4: Diversify current solution M times.If{Termination criterion reached}Branch to LS-DIV-5.
ElseBranch to LS-DIV-2.
LS-DIV-5: Terminate
As mentioned, standard local search method is highlydependent on the initial solution and suffers thedrawback of trapping in local optima. The LS-DIV
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837828

algorithm can be considered as an improved heuristic ofthe local search method, which helps to release suchdependency and facilitates current solutions to escapefrom any local optima.
4. Hybrid algorithm of simulated annealing and tabu
search
SA and TS are two well-known Meta heuristics insolving optimization problems. In this paper, wepropose a hybrid heuristic algorithm by combining SAand TS to solve the problem of VRPTW.
4.1. Simulated annealing
Kirkatrick et al. (1983) started the work of solvingcombinatorial optimization problem using SA, whichuses a stochastic approach to guide the search. Besidesaccepting better solutions, SA also allows the search toproceed to a neighboring state even if the move causesthe value of the objective function to become worse. SAdirects the search in an optimization problem in thefollowing way: If a move to a neighborhood S0 decreasesthe objective function value, or leaves it unchanged, thenthe move is always accepted. More precisely, thesolution S0 is accepted as the new solution if Dp0;where D ¼ CðS0Þ � CðSÞ; and CðSÞ is the cost of thesolution. In order to allow the search to escape from alocal optimum, moves which increase the objectivefunction value may also be accepted according to aprobability function
eð�D=TÞ > y if D > 0; ð4:1Þ
where T is the parameter of ‘‘temperature’’, and y is arandom number between [0, 1]. The value of T variesgradually from a relatively high temperature to a smallvalue close to zero, which is often controlled by a linearcooling schedule for which the temperature is decreasedlinearly.The temperature T will be reset to a high value after
the occurrence of a special neighborhood withoutaccepting any moves. SA has no ending criterion andhas been statistically proved to be capable of finding theoptimal solution (Davis, 1991). However, SA may getcaught in repetition of moves, e.g., a succession ofmoves that result in cycles. This problem of SA can bedisastrous because of the large consumption of compu-tational time. In order to avoid moves that result incycles and force the search to explore other regions, TSis introduced in the following section.
4.2. Tabu search
TS was introduced as a memory structure to supportand encourage its non-monotonic search (Glover, 1989,
1990, 1997). TS stores the most recently made moves orvisited solutions in a tabu list. Attempts that reverse themoves or reproduce the solutions in the tabu list will bedenied and marked as ‘‘Tabu’’. However, this restrictioncan be realized by an aspiration criterion only if theattempt of move will lead to a new global best solution.The lifetime of a tabu staying in the tabu list iscontrolled by the tabu list size, and the first-in–first-out rule is often used in refreshing the tabu list.There are two kinds of structures for tabu list. The
first one records the recent moves of individual nodesand set them as ‘‘Tabu’’. The structure is describedbelow
fR1; Node 1; R2; Node 2; R3; Node 3;yg: ð4:2Þ
Each pair of the numbers such as {R1, Node 1} indicatesthat Node 1 is moved out from route R1; and likewisefor the other pairs. Any move that attempts to shiftNode 1 back to its original route R1 is prohibited as longas {R1, Node 1} is still in the tabu list.The second structure records the whole route in-
formation when the shift of nodes occurs instead of onlyrecording the node number being shifted. If any of thenodes in this route is shifted out in the recent move, thewhole route is recorded as a ‘‘Tabu’’. The elements ofthis structure are strings of node numbers representingrecently visited routes, e.g.,
f5-9-8-7-2; 12-4-6-3-21; 11-3-13-32-15; yg : ð4:3Þ
The tabu restriction imposed by this structure issimilar to the first structure. Any move is prohibited if itattempts to produce the same route that has beenencountered before. Obviously, the second structureprovides a more accurate memory for recording therecently made moves, although it takes longer computa-tional time for comparison. In this paper, the secondstructure is adopted as the tabu list and its length isempirically set to 10.
4.3. Hybrid heuristic of SA and TS
In the hybrid heuristic of SA and TS, a non-monotonic cooling schedule is used to decrease thetemperature after each accepted move, which is given as
Tkþ1 ¼ Tk=ð1þ tffiffiffiffiffiffiTk
pÞ: ð4:4Þ
The starting temperature Ts is set to 50, and thetime constant t is set to 0.3. When the temperatureis high, the probability of accepting worse move is alsohigh. When the temperature is decreased gradually,the chance of accepting worse move is also reducingand resulting the search approaches the ‘‘thermalequilibrium’’ point. When no more moves can beaccepted, the local optimum is assumed to be reachedand the whole cooling process is repeated by resetting
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 829

the temperature to a high initial value as given by
Tr ¼ Max ðTr=2;TbÞ; ð4:5Þ
where Tr is the reset temperature and Tb is thetemperature at which the best current solution is found.The candidate moves are searched systematically in
the hybrid heuristic, which means that the search ofmove is started from the first position of the first routeonwards. During the process, if the move is not a tabuand satisfies the SA criterion, it will be accepted andthen the search will be restarted from the beginning of anew current solution after updating the tabu list and SAparameters. It follows the idea of FB local searchmethod, but with a tabu structure added to remove anycycling and an SA criterion attached to guide thestochastic search. The hybrid algorithm of SATabu isdescribed below
Ts Starting temperature of SA=50,Tr Reset temperature of SA, originally equal to Ts;Tb Temperature at which the current best solution is
found,Tk Temperature of the current solution,S Current solution,Sb Current best solution,R Number of resets done,t Time constant in the range [0, 1].
Heuristic 2: Hybrid simulated annealing and Tabu
search (SaTabu)
SATabu-1: Obtain an initial solution S using PFIH.SATabu-2: Initialize Tabulist to zero and all the
SA parameters.SATabu-3: Set the iteration counter m ¼ 0 and the
reset counter R ¼ 0:SATabu-4: Generate systematically a S0 in NlðSÞ:
And compute D ¼ CðS0Þ � CðSÞ:SATabu-5: If {S0 is a Tabu}
Branch to SATabu-4 and selectthe next move.
SATabu-6: Accept or reject S0 according to theSA criterion.If {S0 is accepted}
S ¼ S0; update Tabulist and other SAparameters.If {CðSÞoCðSbÞ}Update Sb ¼ S:
Branch to SATabu-7.ElseBranch to SATabu-4 and select thenext move.
SATabu-7: If {the whole neighborhood is searchedwithout any accepted move}Reset temperature, R ¼ R þ 1: Branchto SATabu-4.
SATabu-8: If {R is greater than a preset number}Terminate the program.
ElseBranch to SATabu-4.
5. Genetic algorithm
5.1. Standard GA
GA was introduced by Holland (1975), which statesthat even in large and complicated search spaces, givencertain conditions on the problem domain, GA wouldtend to converge to a solution that is globally optimal ornearly so. GA has a standard structure and procedure,including representation of chromosomes, creation ofinitial population, selection, reproduction and localsearch improvement (LSI).
5.1.1. Representation
Most of the GA applications use binary strings torepresent chromosomes. Unlike these applications, weuse an integer string of length N as the representation ofchromosome, where N is the number of customers inquestion. Each gene in the chromosome is the customernode number assigned to them, and the sequence of thegenes is the order of visiting these customers. Forexample, a chromosome representation can be shown as
2 5 8 10 12 9 3 7 1 4 11: ð5:1Þ
This chromosome represents one feasible solution of12 node VRPTW. In this representation, there is nodepot node number 0, the delimiters, since suchdelimiters in a chromosome greatly restrain the validityof children chromosomes reproduced by crossoveroperation. To decode this chromosome into routeconfiguration, we simply insert the genes into newroutes sequentially in a similar way to PFIH. When aroute is full, a new route starts until the last gene isinserted.
5.1.2. Creation of initial population
In VRPTW, a portion of the population members canbe initialized using the PFIH initial solution and itsrandom neighborsANðSÞ; while the remaining chromo-somes can be produced randomly. The population size iskept at 1000 in our study, and the total generationnumber is set at 500–1000, a compromise betweencomputational time and the results obtained.
5.1.3. Genetic operators
In our problem, the fitness value associated with eachchromosome is their respective total cost in the routeconfiguration. Chromosomes with good fitness value(lower total cost) will have higher chance to be selectedas parents for mating and reproduction. Crossover is the
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837830

key operator to generate new individuals in thepopulation. The mating pool has N=2 pairs of chromo-somes and the crossover operation is applied to eachpair with the crossover probability pc; the value of pc isin general >0.6. The PMX crossover operator is used inthis paper (Thangiah, 1995).Mutation serves the role of bringing random,
unrelated traits into the present population andincreasing the variance of the population. The mutationprocess involves randomly swapping nodes in the samechromosome. There is a probability associated withmutation, pm in the range of [0,1]. Earlier research hasshown that excessive pm drives the GA into convergencesooner than necessary, resulting in undesirable localoptimal solutions. On the contrary, small pm producesthe opposite results, e.g., intolerably slow convergence.An adaptive mutation probability scheme is used in thispaper, which adapts pm to the standard deviation of thepopulation
S ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPN�1i¼0 ðxi � %xÞ2
N � 1
s; ð5:2Þ
where N is the population size, xi is the fitness value ofindividual i and %x is the average fitness of thepopulation. If S is greater or equal to a threshold valueMINPOPDEV=0.5, a minimum pm ¼ pmin ¼ 0:06 isused, otherwise pm ¼ pminþMINPOPDEV�S:
5.1.4. Local search improvement (LSI)
After a new generation is produced via the abovereproduction process, a portion of chromosomes isdecoded into their route configuration, and undergoes al-interchange procedure using local search method toimprove the solutions. The improved solutions areencoded back to the chromosome format. This processis called LSI, which is a supplementary solutionimprovement process. Note that not all of the chromo-somes will undergo the LSI process due to theconsumption of time. In the algorithm, there is a LSIprobability parameter ph; which is set to 0.5. Whenchromosomes are undergoing the LSI process, the FB l-interchange procedure is used since it is less time-consuming than the method of GB.
5.2. Hybrid GA
As described above, the chromosome representationadopted in this paper is in the format of an integerstring, e.g., it could be in the form of
2 5 8 10 12 9 3 7 6 1 4 11 : ð5:3Þ
This chromosome can be decoded into route configura-tion by sequentially pushing the customer nodes intonew routes, which is a very greedy constructive method.By using the method, the above chromosome string may
be decoded into route configuration as
ð2 5 8 10 12 9Þ ð3 7 6 1 4Þ ð11Þ ; ð5:4Þ
where each portion in the parentheses represents oneroute. Clearly, although a feasible solution can beguaranteed, the solution may not be the best one thatthe chromosome string can represent. For the samechromosome string in (5.3), it may also represent manyfeasible solutions as long as all the constraints are notviolated, such as
ð2 5 8 10Þ ð12 9 3 7Þ ð6 1 4 11Þ
ð2 5 8Þ ð10 12 9 3 7 6Þ ð1 4 11Þ
ð2 5 8 10 12Þ ð9 3 7 6 1Þ ð4 11Þ:
ð5:5Þ
The only difference between these representations is thegrouping of customer nodes. With different groupings,one chromosome can represent different solutions. Tosearch better grouping (better fitness value) for eachchromosome, a new hybrid GA is proposed in this paperwhich associates the grouping information with eachchromosome, e.g., the chromosome representation maybe given as
2 5 8 10 12 9 3 7 6 1 4 11
2 5 8 10 12 9 3 7 6 1 4 11
2 5 8 10 12 9 3 7 6 1 4 11
½4 4 4
½3 6 3
½5 5 2:
ð5:6Þ
In each of these new representations, the second partinside the parentheses is the grouping information. Forexample, ½3 6 3 indicates that the first 3 customernodes are in the first route, the next 6 customer nodesare in the second route, and so on. The fitness value canthen be calculated according to the grouping informa-tion easily.The appropriate selection of grouping for chromo-
somes is the major focus in this hybrid GA. Everychromosome has an initial grouping information usingthe greedy constructive method of sequential pushing asused in the standard GA. A local search method is thenused to search new groupings for each chromosome,which is conducted by changing the grouping informa-tion until one feasible better grouping is accepted. Thissearching procedure is similar to the l-interchange localsearch method as described in Section 3, and the onlychanges made here is on the grouping information. Forexample, if the original grouping is ½6 5 1 ; we cancheck the new grouping combinations such as½5 6 1 ; ½5 5 2 ; ½4 5 3 and so on. Thesearching order and operators can be defined easily.Each of the new groupings will be checked for validityfirst, and only feasible groupings will be underconsideration. The search will stop when a new bettergrouping is found as similar to the strategy of FBselection. If there is no new grouping found when thesearching time is out, the grouping information remainsunchanged.
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 831

After the grouping update process, chromosomes willgo through the LSI for further fine-tuning. The wholeimprovement procedure including grouping update andLSI is repeated several times, and then the populationwill undergo the same selection, reproduction process asin the standard GA. The hybrid GA procedure is shownbelow, where P1 and P2 are two preset numbers for thegroupings.
Heuristic 3: Hybrid genetic algorithm (HGA)
HybridGA-1: Initialize chromosomes and set theiteration counter N ¼ 0:
HybridGA-2: Get initial grouping information foreach chromosome.
HybridGA-3: Set the regrouping counter M :HybridGA-4: Update chromosome-grouping
information using FB local search.HybridGA-5: Undergo LSI Process, M ¼ M þ 1:HybridGA-6: If (M > P1)
Branch to HybridGA-7.ElseBranch to HybridGA-4.
HybridGA-7: GA operations: selection, crossover andmutation. N ¼ N þ 1:
HybridGA-8: If (N > P2)Branch to HybridGA-9.
ElseBranch to HybridGA-2.
HybridGA-9: Terminate.The advantages of using the proposed hybrid GA can
be summarized below:
* The chromosome representation becomes much moreflexible. One-to-Many replaces One-to-One represen-tation;
* By choosing from the One-to-Many representation,each chromosome is best represented in terms of thecost value;
* Fine-tuning procedure including grouping updateand LSI plays an important role in this hybrid GA.Since PMX has been shown to be a disruptive
crossover method for VRPTW problems in whichthe order is important, the standard GA is difficult toproduce optimal solutions since the good relations inchromosomes will hardly be maintained after normalcrossover operation;
* The fine-tuning procedure is in charge of rearrangingthe customer order in chromosomes and the GAoperations serve the role of interchanging geneticmaterials between chromosomes as usual.
6. Computational results
In this paper, three heuristics are proposed to solvethe VRPTW, e.g., l-interchange local search method
with diversification (LS-DIV); Hybrid SA with Tabu(SATabu) and Hybrid Genetic Algorithm (HGA). Theheuristics were applied to six data VRPTW setsincluding R1, C1, RC1, R2, C2 and RC2 as generatedby Solomon (Solomon, 1987) consisting of 100 cus-tomers with Euclidean distance. In these problems, thetravel time between the customers is equal to thecorresponding Euclidean distance. The data consist ofgeographical and temporal differences in addition todifferences in demands for the customers. Each of theproblems in these data sets has 100 customers. The fleetsize to service them varies between 2 and 21 vehicles.The VRPTW problems generated by Solomon in-
corporate many distinguishing features of vehicle rout-ing with two-sided time windows. The problems vary infleet size, vehicle capacity, travel time of vehicles, spatialand temporal distribution of customers, time windowdensity (the number of demands with time windows),time window width, percentage of time constrainedcustomers and customer service times. Problem sets R1,C1 and RC1 have narrow scheduling horizon. Hence,only a few customers can be served by the same vehicle.Conversely, problem sets R2, C2 and RC2 have largescheduling horizon, and more customers can be servedby the same vehicle. Problems belonging to C categoriesare clustered data, meaning nodes are clustered eithergeographically or in term of time windows. Problemsfrom R categories are uniformly distributed data andthose from RC categories are hybrid problems havingthe features of both C and R categories.
6.1. Comparison results of competing heuristics
Performance of the three proposed heuristic methodsin this paper have been compared with another ninecompeting methods as shown in Table 1.The explanation of the table is shown below:
(a) Data sets, from C1 to RC2, are compared instead ofcomparing every instance;
(b) In each grid there are two numbers representing theaverage vehicle number and average travel distance,respectively (the upper one for vehicle number andlower one for distance). For example, in class C1,the number pair (10.00, 828.45) means that over the9 instances in C1, the average vehicle numberdeployed is 10, and the average travel distance is828.45;
(c) The last row is the total accumulated sum,indicating the total number of vehicles used in all56 instances and the total travel distance.
The results obtained from the comparison can besummarized below
(a) In category R1, LS-DIV achieves the best averageresults. SATabu produces best solutions in R2 and
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837832

HGA in RC1 and RC2. It is also noticed that inRC2, both results from SATabu and HGA arebetter than those from competing heuristics. In allthe R class data sets where the Solomon instanceshave uniformly distributed customers, our heuris-tics give satisfactory results. For SATabu, it favorsthose VRPTW instances having uniformly distrib-uted customers and large scheduling horizon in R2and RC2. Likewise, HGA is shown to generategood solutions for data instances in RC class.
(b) One observation from the results is the averagevehicle fleet size. Our solutions usually employmore vehicles. However, as stated in the beginningof this paper, the only aim of our algorithm is toreduce the total distance traveled by the vehicles.The size of the fleet does not impose any additionalcost, so that it is possible for our algorithm toreduce the total distance by increasing the numberof vehicles.
(c) The cumulated total travel distance given by thethree heuristics are fairly good as compared withother heuristics. Among the total 12 heuristics,SATabu is ranked 2nd, HGA is ranked 4th and LS-DIV is ranked 7th.
The solutions for all the instances are listed inAppendix A. The results presented here are the bestsolutions collected after running the program indepen-dently for many times for each instance. Although weonly marked down the best result for each benchmarkproblem, the standard deviation of the results is low,around 1–3%, which shows that the solutions producedfrom our proposed heuristics are consistent.
6.2. Comparison with the best-known results
A comparison between our heuristics and the best-known results in literature according to the authors’ bestknowledge is shown in Appendix A. Those results arecollectively gathered from different papers in literaturecovering the most recent research on the optimization ofVRPTW in using Solomon’s data sets. All the referencesare clearly presented in Appendix A, and thosecompetitive results are highlighted. Most of the better/equivalent solutions are observed to come from thecategories of C1, R2 and RC2.Table 2 shows the average travel distance for each
class of data similar to Table 1, the percentage increaseof our heuristics against the best-known results accord-ing to our best knowledge as well as the number ofsolutions obtained from our proposed heuristics that arebetter than or equivalent to the best solutions (indicatedby a fraction, e.g., 3/9 means 3 good solutions out of 9instances). As can be seen, the average performance overthe six data sets against the reference results for the threedifferent heuristics are shown in the table. In each of theT
able1
Comparisonamongdifferentheuristics
Prob
Rochatand
Russell
Chiangand
Potvin
etal.
Potvin
and
Taillard
etal.
Bachem
etal.
Chiangand
Homberger
and
LS-D
IVSATabu
HGA
class
Taillard
(1995)
(1995)
Russell(1996)
(1996)
Bengio
(1996)
(1996)
(1997)
Russell(1997)
Gehring(1999)
C1
10.00
10.00
10.00
10.00
10.00
10.00
10.00
10.00
10.00
10.0
10.0
10.0
828.45
930.00
909.80
861.00
838.00
828.45
828.38
828.38
828.38
850.71
841.92
851.05
C2
3.00
3.00
3.00
3.00
3.00
3.00
3.00
3.00
3.00
3.1
3.3
3.2
590.32
681.00
684.10
602.50
589.90
590.30
591.88
591.42
589.86
646.2
612.75
620.12
R1
12.58
12.66
12.50
12.60
12.60
12.25
12.25
2.17
11.92
13.3
13.1
13.2
1197.42
1317.00
1308.82
1294.70
1296.83
1216.70
1264.24
1204.19
1228.06
1197.27
1213.16
1220
R2
3.09
2.91
2.91
3.10
3.00
3.00
2.91
2.73
2.73
4.5
4.6
4.4
954.36
1167.00
1166.42
1185.90
1117.70
995.38
1100.33
986.32
969.95
979.53
952.3
985.69
RC1
12.38
12.38
12.38
12.60
12.10
11088
11.75
11.88
11.63
13
12.7
13.3
1369.48
1523.00
1473.90
1465.00
1446.20
1367.51
1414.63
1397.44
1392.57
1413.1
1415.62
1366.62
RC2
3.62
3.38
3.38
3.40
3.40
3.38
3.38
3.25
3.25
4.8
5.6
5.2
1139.79
1398.00
1401.50
1476.10
1360.60
1165.62
1341.35
1229.54
1144.43
1157.1
1120.37
1108.5
All
427
424
422
427
422
416
414
411
406
466
470
470
57120
65827
65201
64679
62572
57993
61523
58502
57876
58529
57799
57903
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 833

data sets, our results are closely comparable and theoverall distance gap between our heuristics and the bestresults is ranging from 3% to 4.3% which is acceptable.
6.3. Comparison with optimal solutions
In this section, the optimal solutions for some of theVRPTW instances reported in (Desrochers et al., 1992)are compared with our heuristic results in Table 3. Thepercentage increase of the travel distance is alsoincluded. For these seven optimal solutions, ourheuristics have found close results especially for the C1class instances.
6.4. Computational time
Our three heuristics use different approach to solveVRPTW, and their computational time is differentconsequently. Table 4 shows the average time andstandard deviation for the heuristics. For LS-DIV, eachinstance is diversified 10 times after the current solutionis stuck in local optima. For SATabu, the totaltemperature reset is 10 times. HGA has a populationsize of 1000 and a generation size of 500. All thealgorithms are written in C++ programming language,and were run in a Pentium II 330Mhz PC. There were atleast 10 independent runs for each of the instances ineach algorithm. The time needed to find the solutions isconsistent and with only minor difference in the
computational time for each run. As can be seen,HGA takes the longest time to run as expected becauseof its large population size and its gradual evolutionarymanner. LS-DIV and SATabu take shorter time to runand offer reasonably good results.
7. Conclusions and future works
In this paper, the usage and implementation ofl-interchange local search method and its modifiedheuristic LS-DIV have been studied. The heuristic issimple to implement and the obtained current solution iscapable of avoiding local optima via the implementationof diversification. A hybrid heuristics of SA and TS hasalso been proposed, which is capable of exploring largersearch space by overcoming the problem of local optimaor cycling of moves. In addition, a new hybrid GA hasbeen proposed in this paper, which adopts a newchromosome structure containing more informationabout the vehicle route configuration. By combining
Table 2
Percentage increase and number of good solutions
Prob class Best result LS-DIV SATabu HGA
C1 827.5 850.71 +2.8% 3/9 841.92 +1.7% 5/9 851.05 +2.8% 3/9
C2 589.9 646.2 +9.5% 1/8 612.75 +3.9% 2/8 620.12 +5.1% 1/8
R1 1174.7 1197.27 +1.9% 2/12 1213.16 +3.3% 2/12 1220 +3.8% 2/12
R2 942.0 979.53 +4.0% 4/11 952.3 +1.1% 4/11 985.69 +4.6% 4/11
RC1 1354.1 1413.1 +4.3% 2/8 1415.62 +4.5% 0/8 1366.62 +0.9% 2/8
RC2 1081.3 1157.1 +7.0% 1/8 1120.37 +3.6% 3/8 1108.5 +2.5% 3/8
All 56108 58529 +4.3% 13/56 57799 +3.0% 16/56 57903 +3.2% 15/56
Note: Percentage=(mGA result�best result)/best result.
Table 3
Comparison between optimal solutions and our heuristic solutions
Data set Optimum LS-DIV SATabu HGA
C101 10/827.3 10/828.937 +0.2% 10/828.937 +0.2% 10/828.937 +0.2%
C102 10/827.3 10/831.734 +0.5% 10/828.937 +0.2% 10/832.672 +0.6%
C106 10/827.3 10/840.482 +1.6% 10/828.937 +0.2% 10/836.653 +1.1%
C107 10/827.3 10/828.937 +0.2% 10/828.937 +0.2% 10/828.937 +0.2%
C108 10/827.3 10/853.339 +3.1% 10/830.939 +0.4% 10/861.999 +4.2%
R101 18/1607.7 19/1648.86 +2.5% 19/1655.03 +2.9% 19/1660.33 +3.3%
R102 17/1434.0 18/1482.77 +3.4% 19/1517.06 +5.8% 18/1486.82 +3.7%
Table 4
Average time needed for each method
Heuristics LS-DIV SATabu HGA
Time (s) 158 275 1340
Standard deviation 2.3% 1.2% 1.8%
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837834

the new structure with local search approaches, eachchromosome representation can be fine-tuned forbetter routing solutions. Results obtained are encoura-ging and show the effectiveness of the proposed hybridheuristics.An extensive computational study on a set of bench-
mark problems based on the Solomon’s 56 VRPTWwith 100-customer instances has been performed. All theresults obtained from our heuristics have been comparedwith the best-known results in literature according toour best knowledge. It has been shown that ourheuristics produce competitive solutions as well asachieve good averaged results.
To reduce the needed computational time of runningthe proposed heuristics, a parallel and distributed GA iscurrently being developed using the Internet and Peer-to-Peer computing technology. Such parallel computingapproach should also increase the efficiency andaccuracy of our heuristics by employing migrationstrategy in the algorithm. Progress and results will bereported in due course.
Appendix A
See Table 5.
Table 5
Detail results of the heuristics
Prob class Reference Best-known LS-DIV SATabu HGA
NV TD NV TD NV TD NV TD
C101 Desrochers et al., 1992 10 827.3 10 828.937 10 828.937 10 828.937
C102 Desrochers et al., 1992 10 827.3 10 831.734 10 828.937 10 832.672
C103 Rochat and Taillard, 1995 10 828.26 10 869.178 10 860.39 10 859.779
C104 Rochat and Taillard, 1995 10 824.78 10 900.467 10 894.822 10 893.225
C105 Potvin and Bengio, 1996 10 828.94 10 828.737 10 828.937 10 828.937
C106 Desrochers et al., 1992 10 827.3 10 840.482 10 828.937 10 836.653
C107 Desrochers et al., 1992 10 827.3 10 828.937 10 828.937 10 828.937
C108 Desrochers et al., 1992 10 827.3 10 853.339 10 830.939 10 861.999
C109 Potvin and Bengio, 1996 10 828.94 10 875.312 10 849.034 10 890.92
C201 Potvin and Bengio, 1996 3 591.56 3 591.557 3 591.557 3 591.557
C202 Potvin and Bengio, 1996 3 591.56 3 612.249 3 591.557 3 613.478
C203 Rochat and Taillard, 1995 3 591.17 3 620.772 3 628.124 3 646.776
C204 Potvin and Bengio, 1996 3 590.60 3 655.921 4 601.23 4 605.345
C205 Potvin and Bengio, 1996 3 588.88 4 680.954 3 598.764 4 631.21
C206 Potvin and Bengio, 1996 3 588.49 3 674.179 4 653.788 3 648.915
C207 Rochat and Taillard, 1995 3 588.29 3 612.251 3 618.023 3 609.157
C208 Rochat and Taillard, 1995 3 588.32 3 720.953 4 618.673 3 614.951
R101 Desrochers et al., 1992 18 1607.7 19 1648.86 19 1655.03 19 1660.33
R102 Desrochers et al., 1992 17 1434.0 18 1482.77 19 1517.06 18 1486.82
R103 Thangiah et al., 1994 13 1207 15 1221.06 13 1234.43 13 1272.14
R104 Rochat and Taillard, 1995 10 982.01 12 1032.03 10 1024.38 11 1073.63
R105 Rochat and Taillard, 1995 14 1377.11 15 1378.11 16 1382.71 16 1380.44
R106 Rochat and Taillard, 1995 12 1252.03 12 1288.22 13 1271.11 13 1283.06
R107 Homberger and Gehring, 1999 10 1120.85 12 1123.7 12 1116.04 12 1117.81
R108 Taillard et al., 1996 9 968.59 11 989.57 10 994.876 10 995.361
R109 Chiang and Russell, 1997 12 1013.16 13 1027.49 13 1129.79 14 1101.37
R110 Rochat and Taillard, 1995 11 1080.36 11 1108.07 11 1119.53 11 1162.19
R111 Homberger and Gehring, 1999 10 1099.46 12 1086.36 12 1091.11 12 1093.76
R112 Rochat and Taillard, 1995 10 953.63 10 981.09 10 1020.52 10 1012.85
R201 Homberger and Gehring, 1999 4 1252.37 6 1282.41 8 1198.15 6 1243.18
R202 Homberger and Gehring, 1999 3 1198.45 6 1147.53 6 1077.66 6 1188.91
R203 Homberger and Gehring, 1999 3 942.64 5 971.985 5 933.286 5 1050.03
R204 Homberger and Gehring, 1999 2 854.88 5 813.712 4 826.19 4 800.361
R205 Homberger and Gehring, 1999 3 1013.47 5 1015.99 5 1049.04 5 1056.54
R206 Thangiah et al., 1994 3 833 4 1010.72 5 974.5 5 984.648
R207 Rochat and Taillard, 1995 3 814.78 3 921.552 4 875.757 3 920.269
R208 Homberger and Gehring, 1999 2 731.23 4 778.381 3 769.256 3 770.691
R209 Thangiah et al., 1994 3 855 3 945.276 3 912.47 3 902.67
R210 Homberger and Gehring, 1999 3 955.39 5 1003.26 5 961.179 5 1037.58
R211 Homberger and Gehring, 1999 2 910.09 4 884.703 3 896.108 4 887.476
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 835

References
Bachem, A., Bodmann, M., Bolz, G., Emden-Weinert, T., Erdmann,
A., Kiahaschemi, M., Monien, B., Pr +omel, H.J., Schepers, J.,
Schrader, R., Schulze, J., Tsch +oke, S., 1997. Verbundprojekt
PARALOR: Parallele Algorithmen zur Wegeoptimierung in
Flugpaanung und Logistik. Report No. 97-269, Beitrag zur
Statustagung des BMBF HPSC 97, Angewandte Mathematik und
Informatik, Universit.at K +oln, K +oln.
Beasley, J., 1983. Route first-cluster second methods for vehicle
routing. Omega 11, 403–408.
Bertsimas, D., Simchi-Levi, D., 1996. The new generation of vehicle
routing research: robust algorithms addressing uncertainty. Opera-
tions Research 44, 286–304.
Bodin, L., Golden, B., Assad, A., Ball, M., 1983. The state of the art in
the routing and scheduling of vehicles and crews. Computers and
operations Research 10 (2), 63–211.
Bramel, J., Simchi-Levi, D., 1995. A location based heuristic
for general routing problems. Operations Research 43,
649–660.
Chiang, W.-C., Russell, R.A., 1996. Simulated annealing meta-
heuristics for the vehicle routing problem with time windows.
Annals of Operations Research 63, 3–27.
Chiang, W.-C., Russell, R.A., 1997. A reactive tabu search meta-
heuristics for the vehicle routing problem with time windows.
INFORMS Journal on computing 9, 417–430.
Christofides, N., 1985. Vehicle routing. In: Lawler, E.L., Lenstra, J.K.,
Rinnooy Kan, A.H.G., Shmoys, D.B. (Eds.), The Traveling
Salesman Problem: a Guided Tour of Combinatorial Optimization.
Wiley, New York, pp. 431–448.
Christofides, N., Mingozi, A., Toth, P., 1978. The vehicle routing
problem. In: Christofides, N., Mingozzi, A., Toth, P., Sandi,
C. (Eds.), Combinatorial Optimization. Wiley, New York,
pp. 318–338.
Cornu!ejols, G., Harche, F., 1993. Polyhedral study of the capacitated
vehicle routing problem. Mathematical Programming 60, 21–52.
Davis, L., 1991. Handbook of Genetic Algorithms. Van Nostrand
Reinhold, New York.
Desrochers, M., Desrosiers, J., Solomon, M., 1992. A new optimiza-
tion algorithm for the vehicle routing problem with time windows.
Operations Research 40 (2), 342–354.
Federgruen, A., Simchi-Levi, D., 1995. Analytical analysis of
vehicle routing and inventory routing problems. In: Ball, M.O.,
Magnanti, T.L., Monma, C.L., Nemhauser, G.L. (Eds.), Hand-
books in Operations Research and Management Science, the
Volume on Network Routing. North-Holland, Amsterdam,
pp. 297–373.
Fisher, M., 1993. Vehicle Routing. Handbooks on Operations
Research and Management Science, Volume on Networks,
North-Holland, Amsterdam, in preparation.
Fisher, M.L., 1994. Optimal solution of vehicle routing problems using
minimum k-tree. Operations Research 42, 626–642.
Fisher, M.L., 1995. Vehicle routing. In: Ball, M.O., Magnanti, T.L.,
Monma, C.L., Nemhauser, G.L. (Eds.), Handbooks in Operations
Research and Management Science, the Volume on Network
Routing. North-Holland, Amsterdam, pp. 1–33.
Fisher, M.L., Jaikumar, R., 1981. A generalized assignment heuristic
for vehicle routing. Networks 11, 109–124.
Garcia, B.-L., Potvin, J.-Y., Rousseau, J.-M., 1994. A parallel
implementation of the tabu search heuristic for vehicle routing
problems with time window constraints. Computers & Operations
Research 21 (9), 1025–1033.
Gaskel, T.J., 1967. Bases for vehicle fleet scheduling. Operational
Research Quarterly 18, 281–295.
Gillett, B.E., Miller, L.R., 1974. A heuristic algorithm for the vehicle
routing dispatch problem. Operational Research 22, 340–349.
Glover, F., 1989. Tabu Search-Part I. ORSA Journal on Computing
1 (3), 190–206.
Glover, F., 1990. Tabu search-part II. ORSA Journal on Computing 2
(1), 4–32.
Glover, F., 1997. Manuel Lagun. In: Tabu Search. Kluwer Academic
Publishers, Dordrecht.
Hax, A.C., Candea, D., 1984. Production and Inventory Management.
Prentice-Hall, Englewood Cliffs, NJ.
Holland, J.H., 1975. Adaptation in Natural and Artificial Systems.
University of Michigan Press, Ann Arbor.
Table 5 (continued)
Prob class Reference Best-known LS-DIV SATabu HGA
NV TD NV TD NV TD NV TD
RC101 Chiang and Russell, 1997 15 1642.82 14 1677.68 14 1677.93 15 1658.96
RC102 Chiang and Russell, 1997 13 1540.97 15 1512.02 14 1569.73 15 1514.85
RC103 Thangiah et al., 1994 11 1110 11 1210.29 12 1196.12 13 1149.86
RC104 Rochat and Taillard, 1995 10 1135.83 12 1252.41 10 1264.73 10 1173.47
RC105 Homberger and Gehring, 1999 13 1637.15 15 1626.47 15 1648.88 16 1585.34
RC106 Chiang and Russell, 1997 12 1395.37 14 1465.07 13 1480.06 15 1403.1
RC107 Taillard et al., 1997 11 1230.54 12 1338.69 12 1303.36 13 1290.76
RC108 Taillard et al., 1997 10 1139.82 11 1221.48 12 1184.68 10 1157.20
RC201 Thangiah et al., 1994 4 1249 4 1308.31 5 1303.64 5 1354.96
RC202 Taillard et al., 1997 4 1164.25 5 1251.52 8 1151.46 5 1257.48
RC203 Homberger and Gehring, 1999 3 1060.45 5 1142.39 7 1032.7 5 1063.77
RC204 Homberger and Gehring, 1999 3 799.12 4 848.05 4 865.513 4 899.347
RC205 Homberger and Gehring, 1999 4 1302.42 6 1463.7 6 1426.09 8 1236.18
RC206 Thangiah et al., 1996 3 1158.81 5 1148.33 5 1162.6 5 1133.86
RC207 Thangiah et al., 1996 3 1082.32 5 1171.52 5 1078.65 5 1068.73
RC208 Rochat and Taillard, 1995 3 833.97 5 922.566 5 942.78 5 854.749
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837836

Homberger, J., Gehring, H., 1999. Two evolutionary metaheuristics
for the vehicle routing problem with time windows. INFOR 37,
297–318.
Kirkatrick, S., Gelatt, C.D., Vecchi, P.M., 1983. Optimization by
simulated annealing. Science 220, 671–680.
Kohl, N., Madsen, O.B.G., 1997. An optimization algorithm for the
vehicle routing problem with time windows based on Lagrangean
relaxation. Operations Research 45 (3), 395–406.
Kohl, N., Desrosiers, J., Madsen, O.B.G., Solomon, M.M., Soumis,
F., 1999. 2-path cuts for the vehicle routing problem with time
windows. Transportation Science 33 (1), 101–331116.
Kolen, A.W.J., Rinnooy Kaan, A.H.G., Trienekens, H.W.J.M., 1987.
Vehicle routing with time windows. Operations Research 35 (2),
266–331273.
Kontoravdis, G., Bard, J.F., 1994. Improved Heuristics for the Vehicle
Routing Problem with Time Windows, Technical Report, Depart-
ment of Mechanical Engineering, University of Texas, Austin, TX.
Laporte, G., 1992. The vehicle routing problem: an overview of exact
and approximate algorithms. Europe Journal of Operational
Research 59, 345–358.
Osman, I.H., 1993a. Vehicle routing and scheduling: application,
algorithms and developments. Proceedings of the International
Conference on Industrial Logistics, Rennes, France.
Osman, I.H., 1993b. Metastrategy simulated annealing and tabu
search algorithms for the vehicle routing problems. Annals of
Operations Research 42, 421–451.
Osman, I.H., Christofides, N., 1994. Capacitated clustering problem
by hybrid simulated annealing and tabu search. International
Transaction in Operational Research 1 (3) 317–336.
Potvin, J.-Y., Bengio, S., 1996. The vehicle routing problem with time
windows—part II: genetic search. INFORMS Journal on Comput-
ing 8, 165–172.
Potvin, J.Y., Kervahut, T., Garcia, B.L., Rousseau, J.M., 1996. The
vehicle routing problem with time windows; part I: tabu search.
INFORMS Journal on Computing 8, 158–164.
Rochat, Y., Taillard, E.D., 1995. Probabilistic diversification and
intensification in local search for vehicle routing. Technical Report
CRT-95-13, Centre de recherche sur les transports, Universit!e de
Montr!eal, Montr!eal.
Russel, R.A., 1977. An effective heuristics for the m-tour traveling
salesman problem with some side constraints. Operational Re-
search 25, 521–524.
Russell, R.A., 1995. Hybrid heuristics for the vehicle routing problem
with time windows. Transportation Science 29, 156–166.
Solomon, M.M., 1987. Algorithms for vehicle routing and scheduling
problems with time window constraints. Operational Research
35 (2), 254–265.
Taillard, E., Badeau, P., Gendreau, M., Guertin, F., Potvin, J.-Y.,
1996. A new neighborhood structure for the vehicle routing
problem with time windows. Transportation Science.
Taillard, E., Badeau, P., Gendreau, M., Guertin, F., Potvin, J.-Y.,
1997. A tabu search heuristic for the vehicle routing problem with
soft time windows. Transportation Science 31, 170–186.
Thangiah, S.R., 1995. Vehicle routing problems with time windows
using genetic algorithms. In: Chambers, L. (Ed.), Practical Hand-
book of Genetic Algorithms: New Frontiers, Vol. II. CRC Press,
Boca Raton, FL, pp. 253–277.
Thangiah, S.R., 1999. A hybrid genetic algorithm, simulated annealing
and tabu search heuristics for the vehicle routing problem with time
windows. In: Chambers, L. (Ed.), Practical handbook of Genetic
Algorithms: Complex Coding Systems, Vol. III. CRC Press, Boca
Raton, FL, pp. 253–277.
Thangiah, S.R., Nygard, K., 1992. School bus routing using genetic
algorithms. Proceedings of the Applications of Artificial Intelli-
gence X: Knowledge Based Systems, Orlando.
Thangiah, S.R., Petrovic, P., 1998. Introduction to genetic heuristics
and vehicle routing problems with complex constraints. In:
Woodruff, D.L. (Ed.), Advances in Computational and Stochastic
Optimization, Logic Program and Heuristics Search. Kluwer
Academic Publishers, Dordrecht, pp. 253–280.
Thangiah, S.R., Vinayagamoothy, R., Gubbi, A., 1993. Vehicle
routing with time deadlines using genetic and local algorithms.
Proceedings of the Fifth International Conference on Genetic
Algorithms, Morgan Kaufman, NY, pp. 506–513.
Thangiah, S.R., Osman, I.H., Vinayagaoorthy, R., Sun, T., 1994.
Algorithms for vehicle routing problems with time deadlines.
American Journal of Mathematical and Management Science
13 (3&4), 323–355.
Thangiah, S.R., Potvin, J.-Y., Sun, T., 1996. Heuristics approaches to
vehicle routing with backhauls and time windows. International
Journal of Computers and Operations Research 23 (11), 1043–
1057.
Thompson, P.M., Psaraftis, H., 1993. Cyclic transfer algorithms for
multi-vehicle routing and scheduling problems. Operations Re-
search 41, 935–946.
Yellow, P., 1970. A computational modification to the saving
method of vehicle scheduling. Operational Research Quarterly
21, 281–283.
K.C. Tan et al. / Engineering Applications of Artificial Intelligence 14 (2001) 825–837 837