ARO 406 MDOF - trylam.comMULTIEDOFSYSTEMS$ Week7 Winter!2016!...
42
ARO 406: Advance Dynamics and Vibra7ons of Aerospace Systems Winter 2016 Try Lam Department of Aerospace Engineering California State Polytechnic University, Pomona
Transcript of ARO 406 MDOF - trylam.comMULTIEDOFSYSTEMS$ Week7 Winter!2016!...

ARO 406: Advance Dynamics and Vibra7ons of Aerospace Systems
Winter 2016
Try Lam Department of Aerospace Engineering
California State Polytechnic University, Pomona
MULTI-‐DOF SYSTEMS Week 7
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 2

Content
• IntroducKons • EquaKons of MoKon for MDOF • Matrix Method • Undamped Normal Modes • Damping with MDOF • Response of MDOF
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 3

Introduc7ons
• MulK-‐Degree of Freedom (MDOF) system are systems where you have at least 2 DOF.
• The method describe here is for simple MDOF system (i.e., no FEM and a few DOF)
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 4

Equa7ons of Mo7on (Current Method)
• For the system on the right we can use a number of current methods we already steady to derive the EOM. – Using Newton’s Law – Using Energy Method – Using SKffness Matrix – Using Lagrange’s EquaKon
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 5

Equa7ons of Mo7on (Newton’s Law)
• EquaKons of MoKon
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 6

Matrix Method
• For the analysis of the MDOF responses it is essenKal to use Matrix methods
• The basic ideas are – Coordinate transformaKon of basic mass and sKffness elements to equaKons in the global coordinates (usually by some FE method).
– TransformaKon of the global coordinates to modal coordinates (matrix method).
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 7

Mass Transforma7on to Global Coordinate
• Assume some linear relaKon between the actual posiKon of the mass element and the global coordinate given by
where {r} is the vector displacement and {z} is the global displacement
• If given a kineKc energy of the form
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 8

Mass Transforma7on to Global Coordinate
• Since we have and
• Then
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 9

S7ffness Transforma7on to Global Coord.
• Now if we look at the potenKal energy we see that
• Now assuming a linear relaKon of the form • The potenKal energy can now be wri`en as
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 10

Example 6.1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 11

Example 6.1
• Since we have no external forces or dampers the EOM is of the form
• The mass matrix is
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 12
Example 6.1
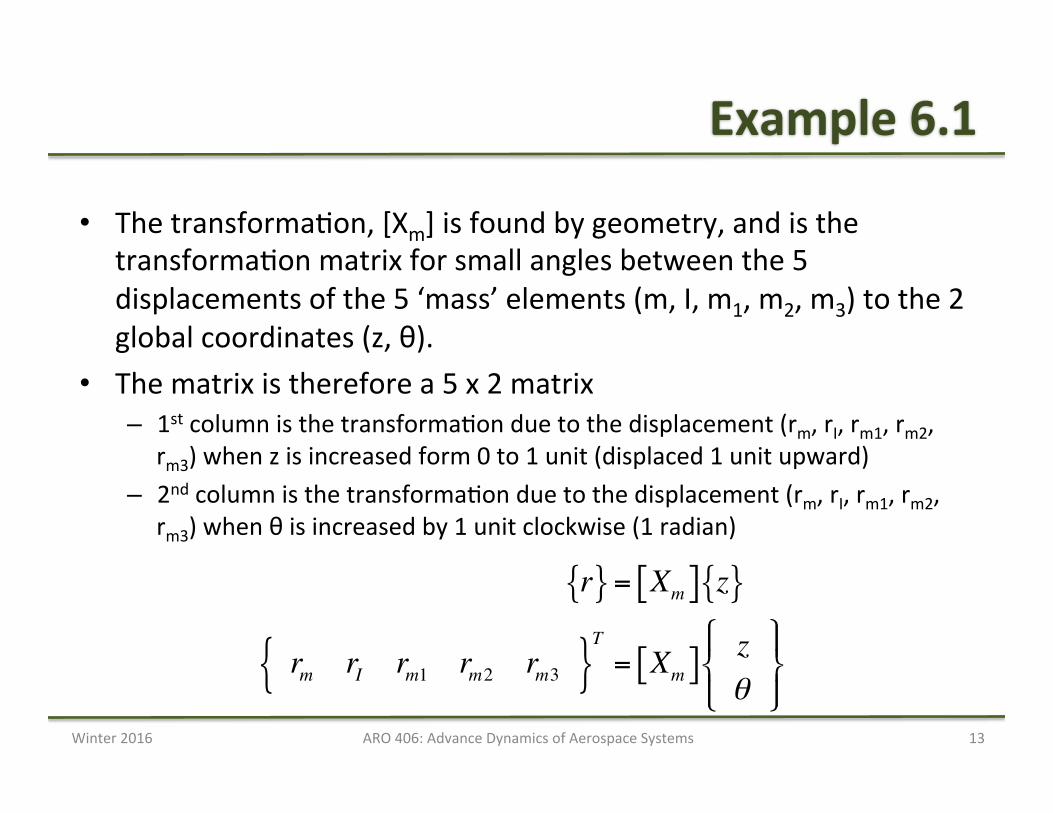
• The transformaKon, [Xm] is found by geometry, and is the transformaKon matrix for small angles between the 5 displacements of the 5 ‘mass’ elements (m, I, m1, m2, m3) to the 2 global coordinates (z, θ).
• The matrix is therefore a 5 x 2 matrix – 1st column is the transformaKon due to the displacement (rm, rI, rm1, rm2,
rm3) when z is increased form 0 to 1 unit (displaced 1 unit upward) – 2nd column is the transformaKon due to the displacement (rm, rI, rm1, rm2,
rm3) when θ is increased by 1 unit clockwise (1 radian)
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 13
r{ }= Xm[ ] z{ }
rm rI rm1 rm2 rm3{ }T= Xm[ ] z
θ
!"#
$#
%&#
'#
Example 6.1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 14
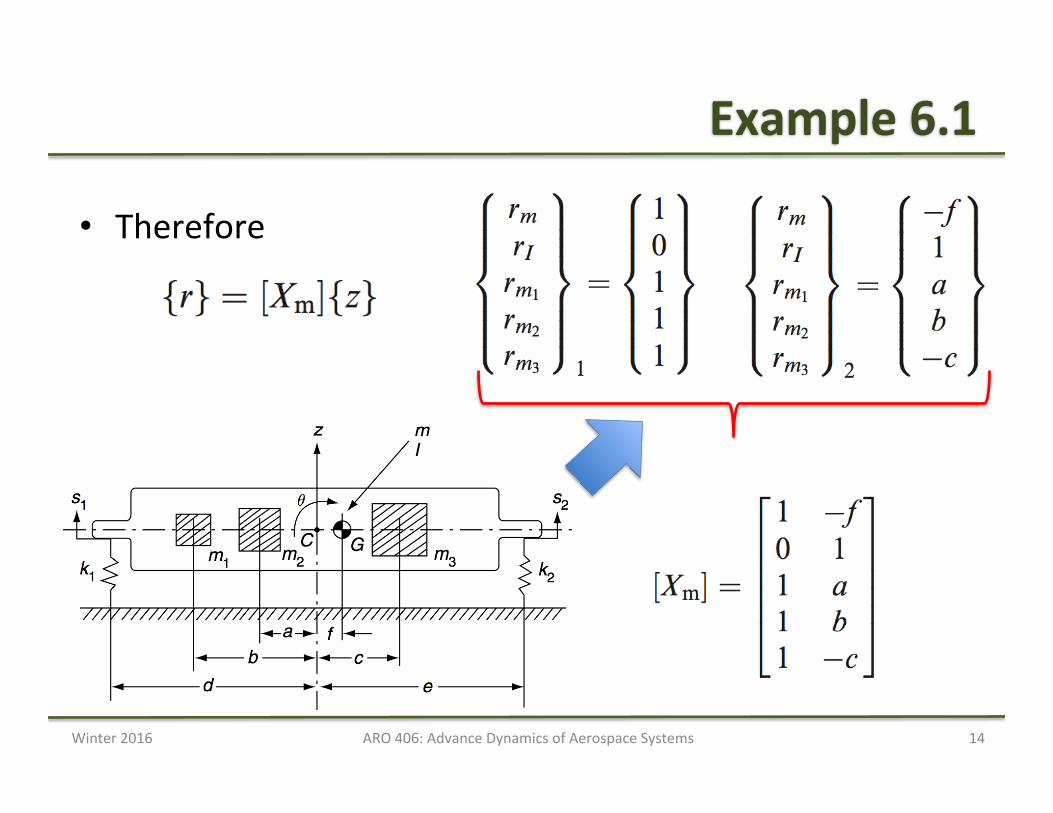
• Therefore

Example 6.1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 15
• Therefore for the mass matrix we have
Example 6.1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 16
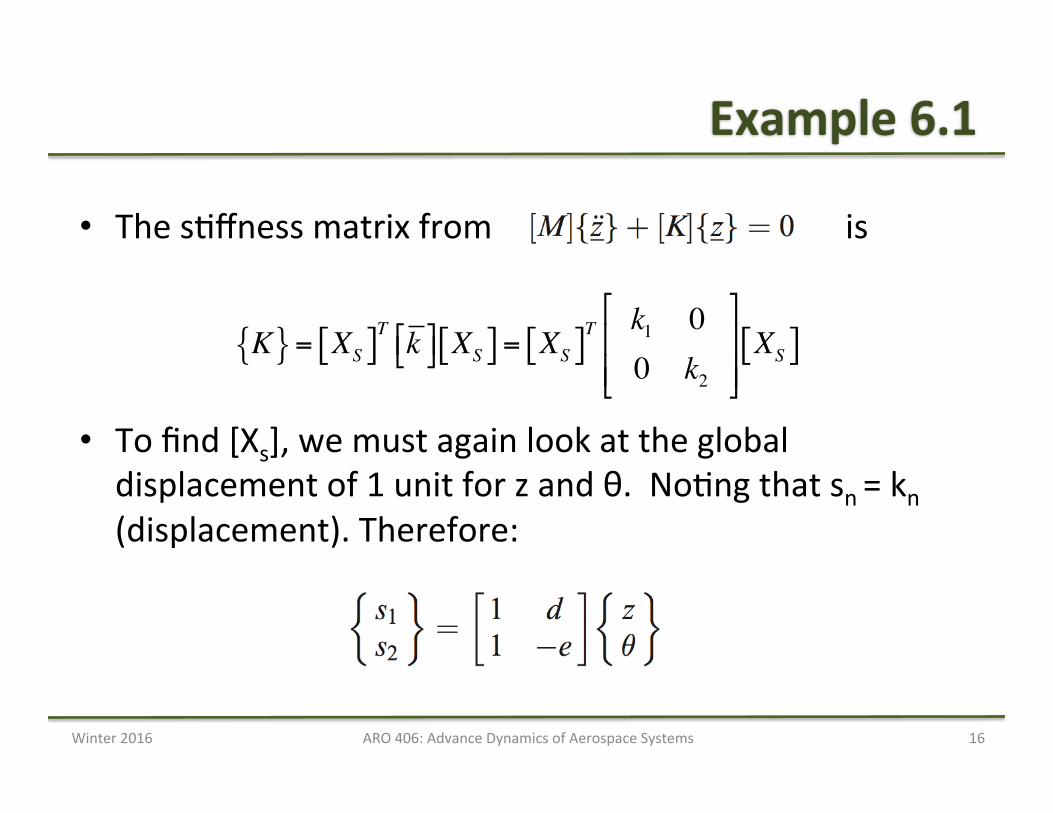
• The sKffness matrix from is
• To find [Xs], we must again look at the global displacement of 1 unit for z and θ. NoKng that sn = kn (displacement). Therefore:
K{ }= XS[ ]T k!" #$ XS[ ] = XS[ ]Tk1 00 k2
!
"%%
#
$&&XS[ ]

Example 6.1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 17
• The sKffness matrix is now
• So finally we have:
Modal Coordinates
• So far we have considered coordinates that are easily to recognize (i.e., along an axis from a mass). – In general, for larger systems, we idenKfy displacements (translaKons and rotaKons) of global coordinates at nodes, and look at displacements only at the points of interests.
• For MDOF system, however, it is possible to define modal coordinates – Represents moKon of a system by coordinates – A mode is a set of displacements for the enKre structure – Changing a single modal coordinate can affect the displacement over all or part of the structure
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 18

Modal Coordinates
• There are two types (classes) of modes – Normal modes: special modes where the mass and sKffness matrices are diagonal
• MoKon of each mode can be treated independently of other modes • Each mode can then be treated as a SDOF
– Assumed (or arbitrary) shapes. Combined with normal modes and the displacement funcKons (FEM) are assumed modes defined between nodes.
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 19

Global to Modal Coordinates
• StarKng with the equaKons for the global coordinates
• We want an alternate form in modal coordinates
• Define a transformaKon
– If the number of {q} << number of {z} then high frequency informaKon is lost. IF number {q] = number {z}, then no loss.
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 20

Global to Modal Coordinates
• TransformaKon of the Mass Matrix – From the KineKc Energy we have
where
• TransformaKon of the SKffness Matrix – From the PotenKal Energy
where Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 21

Global to Modal Coordinates
• TransformaKon of the External Forces – From {F} to {Q} using virtual work
• Thus we have
where
– These relaKonships apply to any transformaKon from global into modal coordinates, whether the modes are assumed or normal modes.
, , Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 22

Example 6.2
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 23

Example 6.2
• Using the following transformaKon
– Arbitrary decided that the 1st mode is [1, 1]T and 2nd mode is [0, 1]T
– 1st mode: 2 masses move 1 unit upward together • Compresses k1 but not k2
– 2nd mode: m1 doesn’t move and m2 moves 1 unit upward • Compresses k2 but not k1
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 24
Part (a)
Therefore, no coupling of the stiffness

Example 6.2
• Using the transformaKon we get
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 25
Part (a)

Example 6.2
• Form the force we have
plug this into the previous equaKon • Local Kme history can be found from
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 26
Part (b)

Undamped Normal Modes
• A special set of coordinates will diagonalize [M] and [K]. This happens if the columns of the transformaKon maKx X are the “eigenvectors” or the natural mode shape of the system.
• Eigenvectors means the characterisKc moKon of the system, and the eigenvalues are the characterisKc frequencies of vibraKon.
• Eigenvectors and eigenvalues can be real or complex: – If no damping, they are both real – Most cases, with damping, eigenvalues and eigenvectors are complex – If proporKonal damping, eigenvalues are complex but vectors are real – If damping is small, they are “almost” real, and works well for many
structures – If gyroscopic coupling (i.e., turntable), get complex modes.
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 27

Finding Eigenvector and Eigenvalues (undamped system)
• Start with the physical system (F=0)
• Assume soluKon
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 28

Finding Eigenvector and Eigenvalues (undamped system)
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 29

Finding Eigenvector and Eigenvalues (undamped system)
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 30

Finding Eigenvector and Eigenvalues (undamped system)
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 31

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 32
Recall:

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 33
• Omimng the applied force (homogenous equaKons)
(Eq. 6.3.1)
Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 34
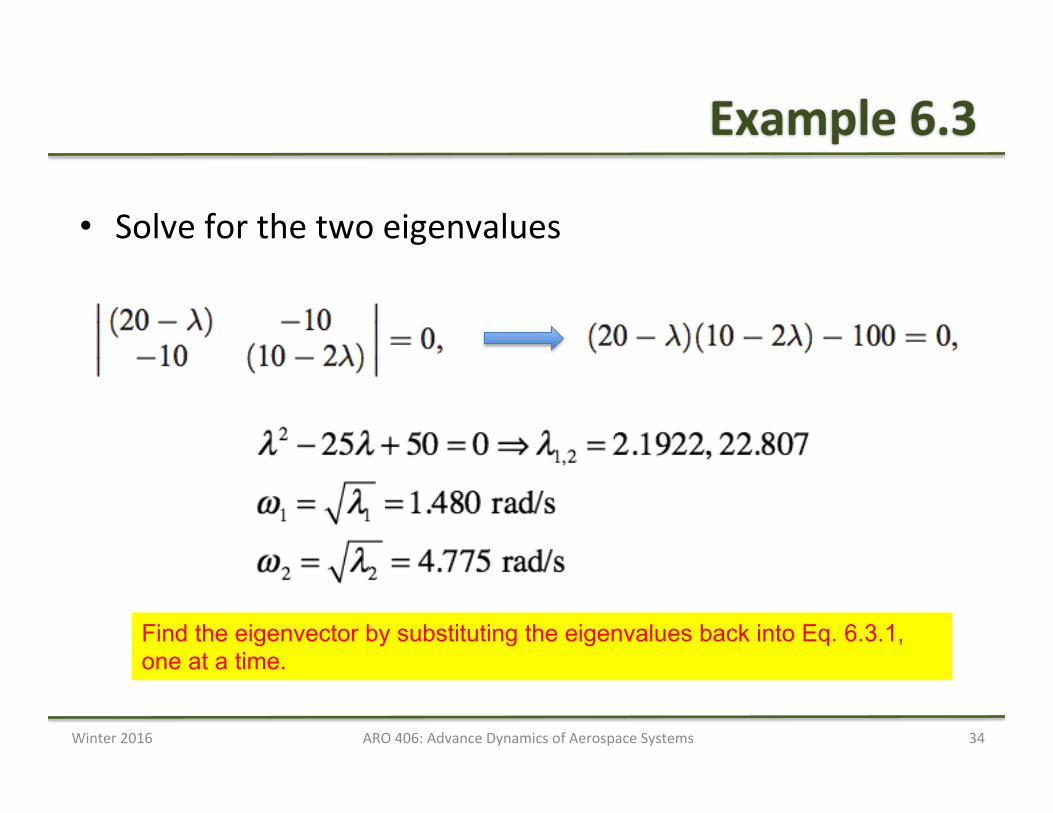
• Solve for the two eigenvalues
Find the eigenvector by substituting the eigenvalues back into Eq. 6.3.1, one at a time.

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 35
• Solve for the two eigenvectors

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 36
• Modes
0.56
1.00
1.00
0.28
MODE 1 MODE 2
Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 37
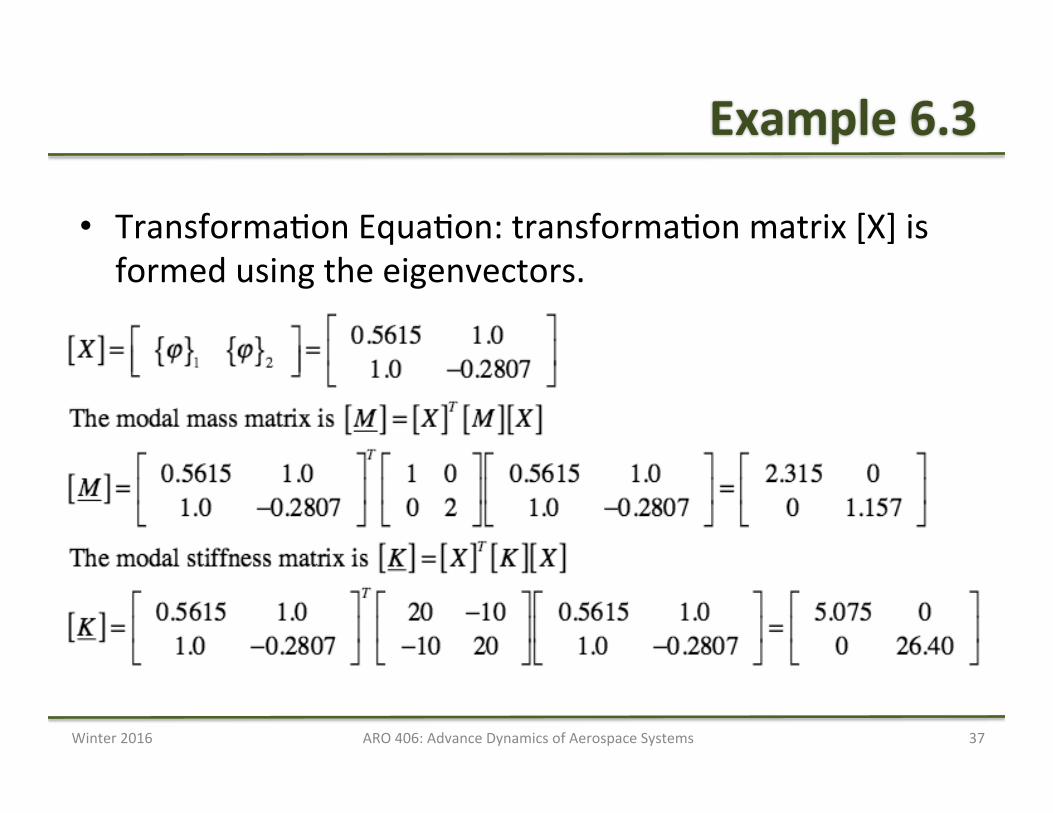
• TransformaKon EquaKon: transformaKon matrix [X] is formed using the eigenvectors.
Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 38
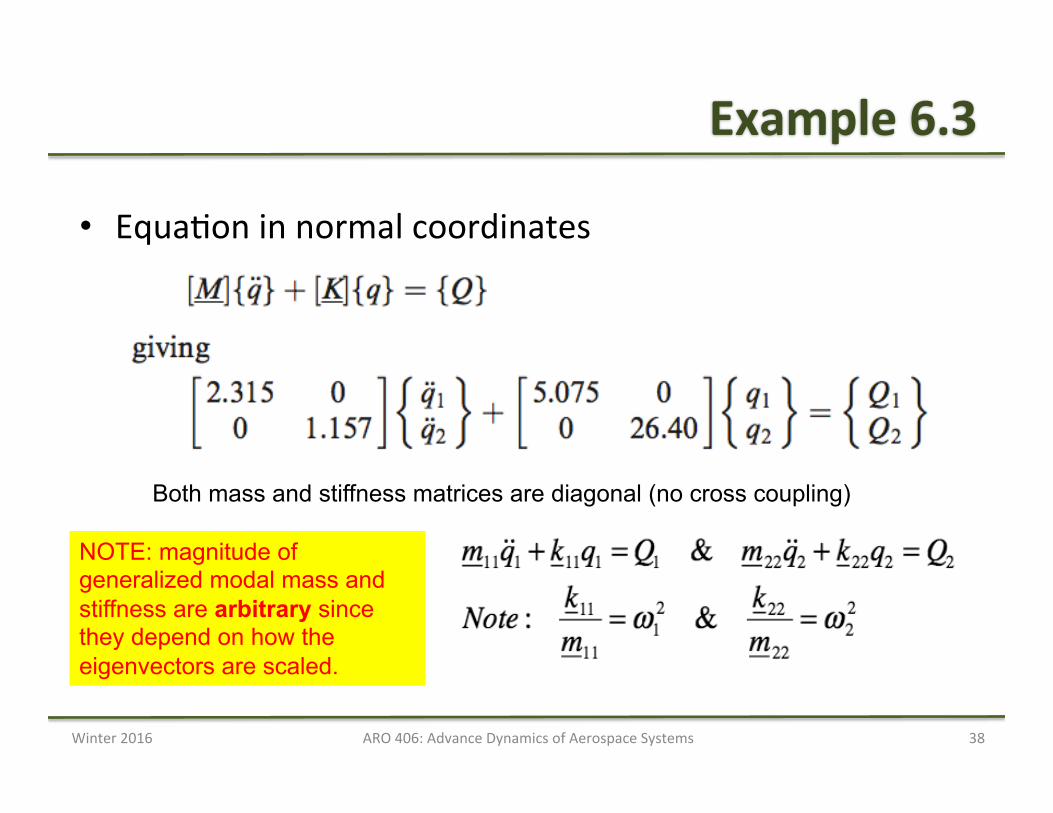
• EquaKon in normal coordinates
Both mass and stiffness matrices are diagonal (no cross coupling)
NOTE: magnitude of generalized modal mass and stiffness are arbitrary since they depend on how the eigenvectors are scaled.
Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 39

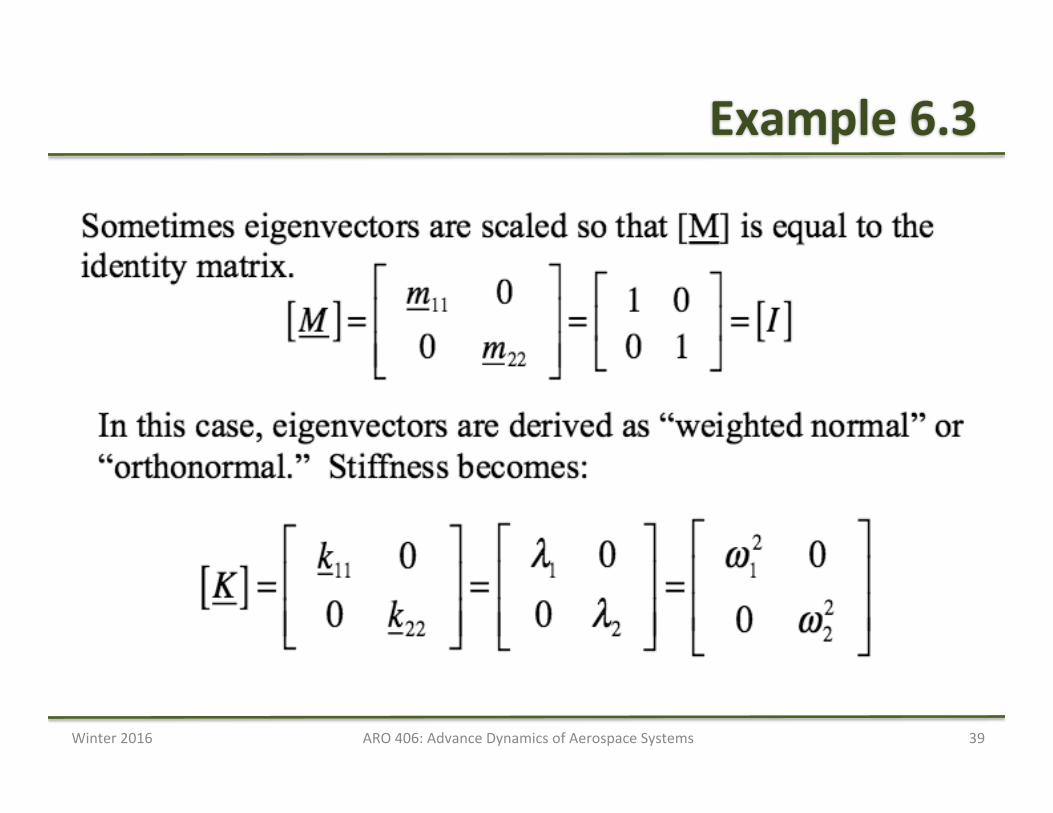
Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 40
Method 1: On Scaling
• If the diagonal mass and sKffness modal coordinates are known the rescale by α.

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 41
Method 1: On Scaling
• Then

Example 6.3
Winter 2016 ARO 406: Advance Dynamics of Aerospace Systems 42
Method 2: On Scaling
• More directly
Therefore you get the same udpated eigenvectors

![LECT06 - MDOF Part 2 [Compatibility Mode]](https://static.fdocuments.in/doc/165x107/577cc1431a28aba711928c4a/lect06-mdof-part-2-compatibility-mode.jpg)


![Voith DIWA. 3 E automatic transmissions in Mercedes-Benz · PDF fileCITARO CITARO L ARO G ARO ARO G ARO L ARO CITARO G CITARO ARO G CITARO L CITARO L v [km/h] 101 91 83 77 101 91 83](https://static.fdocuments.in/doc/165x107/5a70293a7f8b9ab6538bb0f8/voith-diwa-3-e-automatic-transmissions-in-mercedes-benz-nbsppdf.jpg)