
Application of digital image cross-correlation and...
12
journal homepage: www.elsevier.com/locate/jmbbm Available online at www.sciencedirect.com Research Paper Application of digital image cross-correlation and smoothing function to the diagnosis of breast cancer Yougun Han, Dong-Woo Kim, Hyock-Ju Kwon n Department of Mechanical and Mechatronics Engineering, University of Waterloo, 200 University Ave. W., Waterloo, ON, Canada N2L 3G1 article info Article history: Received 25 February 2012 Received in revised form 7 May 2012 Accepted 8 May 2012 Available online 23 May 2012 Keywords: Elastogram DIC DVC Smoothing function abstract Digital image correlation (DIC) algorithm was applied to 2D and 3D B-mode ultrasound (US) images to create 2D and 3D elastograms based on displacement-gradient. The roughness of elastograms caused by signal noises and sub-pixel errors could be greatly improved by employing the smoothing function based on the penalized least square regression method. Using the smoothed elastogram, the size and the relative modulus of the inclusion could be estimated with a reasonable accuracy. The study suggests that the 2D and 3D displacement-gradient elastograms acquired by the combination of DIC and smoothing function have the potential to diagnose pathological tissues in-vivo, and to provide new information that is related to tissue structure and/or pathology. & 2012 Elsevier Ltd. All rights reserved. 1. Introduction Cancer is the top leading cause of death in North America (Jemal et al., 2011; Milan, 2011). Among the various cancers, breast cancer is the most common malignancy in women and the second most common cause of cancer-related mortality (Jemal et al., 2011). In the past several years, early detection and treatment of breast carcinoma has received increased attention and has contributed significantly to the decrease of mortality rate (Smith et al., 2003). Currently, mammography, ultrasound (US) imaging and MRI (magnetic resonance ima- ging) are all used in congruence with each other for non- invasive diagnosis of breast cancer. Although each has its own effective purpose, no single screening method or combi- nation stands out for every individual female. Among them, mammography has been commonly used for the early detection of breast cancer (Lee et al., 2010a). However, regardless of its contribution to the early detection and the reduction of mortality, high false positive rate causing addi- tional testing or biopsy, and the possibility of overdiagnosis and overtreatment arguably outweigh the benefits (Skrabanek, 1989). It is also known that mammography is not effective for Asian women having small, dense breasts (Zhi et al., 2007). On the other hand, the addition of MRI to the screening algorithm adds considerable cost of over $50,000 per cancer (Lee et al., 2010b). US imaging is relatively affordable and accessible; thus it has been given interests as a modality to supplement or replace mammography, especially for the women with dense breasts (Zhi et al., 2007). However, in many cases, the pathologic lesion may not possess sufficient echographic properties and therefore it is difficult to detect the lesion by only using B-mode US images. The breast comprises a complex group of tissues, including fat, glandular, and fibrous tissues, each of which has different stiffness. Pathological changes, such as carcinoma in situ (CIS) and invasive carcinoma, are also known to affect the 1751-6161/$ - see front matter & 2012 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.jmbbm.2012.05.007 n Corresponding author. Tel.: þ1 519 888 4567x33427; fax: þ1 519 885 5862. E-mail addresses: [email protected] (Y. Han), [email protected] (D.-W. Kim), [email protected] (H.-J. Kwon). journal ofthe mechanical behavior of biomedical materials 14 (2012)7–18
Transcript of Application of digital image cross-correlation and...

Available online at www.sciencedirect.com
journal homepage: www.elsevier.com/locate/jmbbm
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8
1751-6161/$ - see frohttp://dx.doi.org/10
nCorresponding autE-mail addresse
Research Paper
Application of digital image cross-correlation andsmoothing function to the diagnosis of breast cancer
Yougun Han, Dong-Woo Kim, Hyock-Ju Kwonn
Department of Mechanical and Mechatronics Engineering, University of Waterloo, 200 University Ave. W., Waterloo, ON, Canada N2L 3G1
a r t i c l e i n f o
Article history:
Received 25 February 2012
Received in revised form
7 May 2012
Accepted 8 May 2012
Available online 23 May 2012
Keywords:
Elastogram
DIC
DVC
Smoothing function
nt matter & 2012 Elsevie.1016/j.jmbbm.2012.05.00
hor. Tel.: þ1 519 888 4567s: [email protected]
a b s t r a c t
Digital image correlation (DIC) algorithm was applied to 2D and 3D B-mode ultrasound (US)
images to create 2D and 3D elastograms based on displacement-gradient. The roughness
of elastograms caused by signal noises and sub-pixel errors could be greatly improved by
employing the smoothing function based on the penalized least square regression method.
Using the smoothed elastogram, the size and the relative modulus of the inclusion could
be estimated with a reasonable accuracy. The study suggests that the 2D and 3D
displacement-gradient elastograms acquired by the combination of DIC and smoothing
function have the potential to diagnose pathological tissues in-vivo, and to provide new
information that is related to tissue structure and/or pathology.
& 2012 Elsevier Ltd. All rights reserved.
1. Introduction
Cancer is the top leading cause of death in North America
(Jemal et al., 2011; Milan, 2011). Among the various cancers,
breast cancer is the most common malignancy in women and
the second most common cause of cancer-related mortality
(Jemal et al., 2011). In the past several years, early detection
and treatment of breast carcinoma has received increased
attention and has contributed significantly to the decrease of
mortality rate (Smith et al., 2003). Currently, mammography,
ultrasound (US) imaging and MRI (magnetic resonance ima-
ging) are all used in congruence with each other for non-
invasive diagnosis of breast cancer. Although each has its
own effective purpose, no single screening method or combi-
nation stands out for every individual female. Among them,
mammography has been commonly used for the early
detection of breast cancer (Lee et al., 2010a). However,
regardless of its contribution to the early detection and the
r Ltd. All rights reserved.7
x33427; fax: þ1 519 885 58(Y. Han), [email protected]
reduction of mortality, high false positive rate causing addi-
tional testing or biopsy, and the possibility of overdiagnosis and
overtreatment arguably outweigh the benefits (Skrabanek,
1989). It is also known that mammography is not effective for
Asian women having small, dense breasts (Zhi et al., 2007). On
the other hand, the addition of MRI to the screening algorithm
adds considerable cost of over $50,000 per cancer (Lee et al.,
2010b). US imaging is relatively affordable and accessible; thus
it has been given interests as a modality to supplement or
replace mammography, especially for the women with dense
breasts (Zhi et al., 2007). However, in many cases, the pathologic
lesion may not possess sufficient echographic properties and
therefore it is difficult to detect the lesion by only using B-mode
US images.
The breast comprises a complex group of tissues, including
fat, glandular, and fibrous tissues, each of which has different
stiffness. Pathological changes, such as carcinoma in situ
(CIS) and invasive carcinoma, are also known to affect the
62.om (D.-W. Kim), [email protected] (H.-J. Kwon).

j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 88
tissue stiffness. Using the difference in stiffness, the oldest
(but still widely in use) standard medical practice of detection
involved palpation. Malignant tumors feel harder than benign
ones which is related to the pathological changes in their
elastic and visco-elastic mechanical properties (Ophir et al.,
1996). It is also reported that average moduli of normal breast
tissue was approximately four times softer than fibroade-
noma, while breast cancer showed a wide range of moduli,
up to seven times higher than those of normal tissue
(Krouskop et al., 1998; Sarvazyan, 1993). While palpation is
simple, it is just a qualitative assessment and can only be
applied to superficial organs. The results are also widely open
to user interpretation (Doyley, 2001).
Recently, elastography has emerged as a method to detect
or classify pathological tissues (Hall, 2003; Lanza di Scalea
et al., 1998; Ophir et al., 2002, 1999, 1996). This imaging
modality intends to detect the difference of the stiffness by
applying the principle of palpation to US signals. Elastograms
are obtained by estimating the strain variations using the
time-gradient of US echo signal, obtained before and after a
slight compression of the tissue, i.e.
e11 ¼ðt1b�t1aÞ�ðt2b�t2aÞ
t1b�t1að1Þ
where t1a and t1b are the arrival times of the pre-compression
echoes from the proximal and distal windows, respectively; t2a
and t2b are the arrival times of the post-compression echoes
from the same windows, respectively (Ophir et al., 1996). The
resulting strain fields are displayed as an image, where soft
areas appear white and hard areas black. The mean depth and
width of the lesion on the elastogram and sonogram are
measured and used as parameters for differentiating benign
and malignant lesions (Kumar et al., 2009; Lyshchik et al., 2005;
Rago et al., 2007; Zhi et al., 2007). Since elastogram images can
be displayed almost simultaneously with B-mode US images,
it is a very useful diagnostic tool for the practitioner to detect
the lesion with different stiffness. However, elastogram is
highly degraded under large strain deformation due to echo
signal decorrelation caused by distortion of window signals,
even after the stretching of the post-compression signals
(Ophir et al., 2002). It is also degraded by lateral and elevational
deformations. Moreover, the direction of loading must be the
same as that of the US wave, and the deformation under
tension is hard to be measured. Other drawbacks include the
lack of 3D imaging capability.
Digital Image Correlation (DIC) is an application which
measures the degree of deformation based on the compar-
ison of two images of the same specimen acquired at two
different stages: one before deformation and one after (Chu
et al., 1985; Kwon et al., 2010). As opposed to time-gradient
strain in Eq. (1), DIC estimates the strain using displacement-
gradient as
e11 ¼ðx1b�x1aÞ�ðx2b�x2aÞ
x1b�x1að2Þ
where x1a and x1b are the 1-directional coordinates of the
proximal and distal windows in the pre-compression image,
respectively; x2a and x2b are the 1-directional coordinates of the
same windows in the post-compression image, respectively.
In this study, we applied DIC to 2D B-mode US images to
characterize the displacement and the strain fields in the
phantom mimicking a human breast. Signal decorrelation
could be successfully suppressed by adopting dynamic refer-
encing instead of fixed referencing scheme (Han et al., 2011).
Dynamic referencing scheme calculates the incremental
displacement by employing the most recent image as a pre-
compression image and the current image as post-compres-
sion image, and sums them together to determine the total
displacement.
However, due to the intrinsic nature of discontinuities of
digital images, sub-pixel errors were necessarily contained in
the displacement which was also corrupted by signal noises.
When the strain was calculated using displacement gradient,
the error level in the strain could be significantly amplified,
particularly when the distance between the windows was
small in Eq. (2).
To reduce the influence of noise and sub-pixel errors,
smoothing function based on the penalized least square
regression (Wahba, 1990), also known as smoothing spline,
was applied to the DIC results. The combination of DIC and
smoothing function demonstrated excellent performance in
determining the strain field in US images, which is the
‘‘displacement-gradient elastogram.’’ The stiffness ratio of
the inclusion to the surrounding matrix, representing carci-
noma and normal tissue respectively, was estimated based
on the strain ratio in the elastogram. This study was
extended to full 3D analysis of 3D US images using the in-
house developed Digital Volume Correlation (DVC) algorithm
combined with the smoothing function. 3D shape of the
inclusion and the relative stiffness of the inclusion could be
estimated with a reasonable accuracy by this analysis.
2. Background
2.1. Digital image cross-correlation
Cross-correlation (CC) is a numerical technique to quantify
the similarity of two sets of signals or data that are acquired
with lagging of time or position. Since a digital image can be
considered as a data set, cross-correlation can be used to
detect the similarity and the lagging between the images.
Mathematically, for discrete real-valued functions f of size N
and g of the greater or equal size, CC is defined as:
ðfUgÞðnÞ �XN�1
m ¼ 0
f ðmÞgðnþmÞ ð3Þ
where n is an integer representing the degree of lagging. High
CC value indicates high degree of similarity; therefore n
yielding the highest value can be regarded as the actual
lagging between two functions. Note that the value of (f . g) is
maximized when the two functions match, because when
positive or negative peaks are aligned, they make the largest
contribution to the summation.
However, CC of the digital images can yield erroneous
result if the brightness of the window varies significantly
from region to region within the image g. Note that a digital
image is a matrix of pixels, and the brightness of each pixel is
expressed by a numeric value between 0 and 255 for 8-bit
gray image, with the tone gradually changing from black to
white as the value increases. Therefore, CC for the bright

j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8 9
region in the image g can be higher than that for the exactly
matching location with f in dark region. For the balanced
consideration of bright and dark regions, Eq. (3) can be
modified by subtracting the average value from each function
before performing correlation, and normalized to have the
value between 0 and 1 as:PN�1m ¼ 0ðf ðmÞ�f aveÞðgðnþmÞ�gavenÞPN�1
m ¼ 0 ðf ðmÞ�f aveÞ2
n o PN�1m ¼ 0 ðgðnþmÞ�gavenÞ
2n i0:5
� ð4Þ
This is called the normalized cross correlation (NCC) which
yields a value of 1 when two data sets are exactly matched
and values close to 0 when no match is made.
However, computation load for NCC is much heavier than
that for CC, since convolution theorem that allows the use of
Fast Fourier Transforms (FFTs) in Eq. (3) cannot be employed
for Eq. (4). The load can be relieved by adopting the sum table
suggested by Lewis (1995). Sum table is the pre-calculated
look-up table over the whole region of function g, and is
referred to whenever a local sum is calculated. NCC adopting
the sum-table method is called the fast normalized cross-
correlation (FNCC).
FNCC algorithm can be extended to multidimensional data
such as 2D and 3D digital images. When the deformation of
the material is small enough to ignore the local distortion of
the visual pattern of the material, one can assign sub-images
of the material before and after deformation around a point
of interest to functions f and g, respectively, and find the 2D
or 3D dimensional lagging which corresponds to 2D or 3D
displacement of the point (Han et al., 2011). By repeating this
procedure to uniformly distributed grid points, displacement
field can be generated. Furthermore, infinitesimal strain
tensor fields can also be determined by taking the gradient
of the displacement field as
eij ¼12
@ui
@xjþ@uj
@xi
!ð5Þ
where xi, ui, and eij refer to coordinate system vector, dis-
placement vector, and strain tensor, respectively.
DIC algorithms have been mainly developed for 2D images
with 2D matrix data sets. For example, in-plane strains in soft
bio-gel were measured by DIC as a non-contact optical sensor
(Kwon et al., 2010). Zhang and Arola (2004) applied DIC to
biological tissues and biomaterials such as arterial tissues,
bovine hoof horn and total hip replacement. DIC has also
been applied to 3D images such as MRI or CT. Lee et al. (2010b)
created 3D finite element model (FEM) of the breast and
employed 3D NCC to compare localized mismatches between
FEM and clinical MR images. Verhulp et al. (2004) applied 3D
DIC to computed tomography (CT) images to measure the
strain in trabecular bone. However, to the best of our knowl-
edge, the application of DIC to 3D US image has not been
reported to date.
For 3D US image analysis, we developed digital volume
correlation (DVC) algorithm by extending FNCC to 3D to
correlate 3D images composed of multiple 2D image stacks.
In both DIC and DVC algorithms, predetermined multiple
material points were tracked to estimate the variations of
displacement and strain fields with the progress of
deformation.
2.2. Data smoothing
Since digital images are composed of pixels, the accuracy of
cross-correlation is limited to the size of a pixel; thus the
estimated displacements necessarily contain sub-pixel scale
errors. On the other hand, US images are usually corrupted by
signal noises in its acquisition and transmission. The major
source of the noise is the speckle noise generated by small
particles in the solution or liquid which reflect ultrasonic
waves (Bilgen and Insana, 1997). Various approaches for noise
reduction have been proposed (Sanches et al., 2008; Sudha
et al., 2009), but none of them can completely remove the
noise. When DIC is applied to noised US images, the sub-pixel
errors are amplified by signal noise and as a consequence the
displacement field yielded by DIC frequently contains sig-
nificant amount of errors. Since displacement gradients are
used to calculate strains, strains are very sensitive to the
displacement errors particularly when the distances between
the grid points are small. Tracking multiple points usually
involves highly dense grid arrays, and rough strains are
frequently generated even from a reasonably smooth displa-
cement dataset in US images.
To resolve this problem, we adopted a smoothing function
that can significantly reduce the small scale errors (Garcia,
2010). In data analysis, smoothing function intends to reduce
experimental noises while preserving the most important
imprints of a dataset, by eliminating random error ei from
noised dataset yi
yi ¼ yi þ ei ð6Þ
to find a smooth true dataset yi.
The smoothing function employed in this study is based on
the penalized least square regression method (Wahba, 1990)
that minimizes criterion function F as:
minfFðyÞg ¼minXn
i ¼ 1
ðyi�yiÞ2þ sPðyÞ
( )ð7Þ
where the first term in the right-hand side is the data
measured by the residual sum of squares (RSS) and s is a
real positive smoothing parameter that controls the degree of
smoothing. A penalty term P(y) is the roughness of smooth
data and can be expressed as a second-order divided differ-
ence (Weinert, 2007) as
PðyÞ ¼ :Dy:2ð8Þ
where J J denotes the Euclidean norm and D is a tri-diagonal
square matrix, which for the equally spaced data is given as
D¼
�1 1
1 �2 1
& & &
1 �2 1
1 �1
0BBBBBB@
1CCCCCCA
ð9Þ
Minimizing FðyÞ using Eqs. (7) and (8) yields the following
linear system that allows the determination of smoothed
data
y¼ ðIn þ sDTDÞ�1y ð10Þ
where In is n by n identity matrix and DT the transpose of D. In
Eq. (10), it is important to choose an appropriate smoothing

Fig. 1 – Schematics of phantom fabrication procedure and
2D US test setup: (a) Solution containing 5% gelatin was
poured into the mold in half; (b) Once the temperature
dropped to 35 1C the prepared inclusion containing 20%
gelatin was placed on top of it; (c) The solution was poured
to fill the rest of the mold; (d) In 2D US test, the phantom
was uniaxially compressed while the US probe acquired US
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 810
parameter s to avoid over- or under- smoothing. It can be
optimally estimated by the method of generalized cross
validation (GCV) introduced by Wahba (1990). When D is
given as in Eq. (9), the GCV method selects the parameters
that minimizes the GCV score given by
GCVðsÞ �nPn
i ¼ 11
1þsl2i
�1� �2
DCT2i ðyÞ
n�Pn
i ¼ 11
1þsl2i
� �2ð11Þ
where (l2i )i¼1,2yn are the eigenvalues of DTD and DCT denotes
n-by-n type-2 discrete cosine transform (Strang, 1999). Using
an s value that minimizes the GCV score of Eq. (11), smoothed
data y can be determined. This method allows fast automatic
smoothing of data in multiple dimensions. We adopted this
method to generate smooth displacement and strain fields
without subjective intervention from users.
images of the deformed phantom.3. Materials and methods
3.1. Numerical validation of DIC smoothing
To validate the performance of the smoothing function in
reducing the roughness of DIC results caused by sub-pixel
errors and signal noises, a digital image of 2000 by 2000 pixels
with random gray values was generated. While the image
was numerically stretched to 10% by 1% increment, evenly
distributed 39�39 grid points across the image were tracked
by the DIC to determine the displacement field at each strain
increment. Strain field was generated from displacement
field by employing the following smoothing schemes: (i) no
smoothing, (ii) strain smoothing, (iii) displacement smooth-
ing, and (iv) combined smoothing. In (ii), smoothing was
applied to the strain field which was generated from the
unsmoothed displacement field, while in (iii) displacement
field was smoothed first, and then strain field was generated
from the smoothed displacement. In (iv), smoothing was
applied to the strain field determined by (iii).
3.2. Phantom preparation
Gelatin based phantoms were designed to contain an inclu-
sion with higher stiffness than the surrounding matrix,
mimicking a carcinoma in a normal tissue. Following the
protocol in Madsen et al. (1982), the inclusion and the matrix
were made with the same constituents to have the similar
echogenicity, i.e., 1 wt% agarose (J.T. Baker, NJ, USA), 2 wt%
glutaraldehide (Sigma-Aldrich, MO, USA), 5 wt% n-propanol
(Fisher-Scientific, NJ, USA), gelatin (Fluka, Germany) (20 wt%
and 5 wt% for inclusion and matrix, respectively), and dis-
tilled water (the remaining wt%). Glutaraldehide acted as a
cross-linker resulting in a melting point of the materials in
the phantom in excess of 68 1C and n-propanol promoted
dissolving of materials. In addition, n-propanol and glutar-
aldehide served as preservatives.
To fabricate the phantom, an inclusion was made first.
After water was heated up to 85 1C, agarose, gelatin, and n-
propanol were added in order. After 3 min of solution time,
glutaraldehide was added, and the solution was kept at an
elevated temperature for 4 more minutes. The resulting
solution was suctioned into a 3 ml syringe (inner diameter
of 8.6 mm) and kept at room temperature for 48 h for gela-
tion. Then, the resulting gel was taken out and stored in
water to prevent shrinkage and dehydration.
Following the same procedure, the solution with 5 wt%
gelatin content was prepared and poured into a long cylind-
rical mold (diameter of 4 cm and height of 8 cm) in half
(Fig. 1(a)). When temperature decreased to 35 1C, the prepared
inclusion was placed on top of the solution and gelled for
5 min (Fig. 1(b)). Then, the solution with 5 wt% gelatin was
added up to the top of the mold and kept 48 more hours
(Fig. 1(c)).
To measure the mechanical properties of the inclusion and
the matrix, cylindrical samples with aspect ratio of 1 (height
and diameter 4 cm each) were additionally made at each
formula following the same procedures.
3.3. Simple compression test
Simple compression tests were conducted using a TA mate-
rial testing machine (TA.xt Plus, Stable Micro Systems, UK)
with a 50 N load cell. Each sample was loaded up to the
engineering strain of 10% at the speed of 10 mm/s. Five tests
were performed at each concentration using different sam-
ples and the results were averaged.
3.4. 2-Dimensional test
The phantom was uniaxially compressed to reach 10%
nominal strain. At each 1% strain step, US image was
recorded using the commercial medical US image machine
(Accuvix XQ, Medison, Korea). US probe was placed in the
direction perpendicular to the axis of cylindrical inclusion so
that circular cross-section of the inclusion was imaged
(Fig. 1(d)). The obtained image has the size of 470�440 pixels
with space resolution of 81 mm/pixel. From the undeformed
image, multiple points were selected at every 20 pixels in
both x and y directions and FNCC algorithm implemented
with sub-pixel algorithm was applied to track these points
through the deformed images. To avoid the decorrelation
errors, dynamic referencing was employed (Han et al., 2011).
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8 11
Based on the acquired relative movements of grid points,
displacement and strain fields were estimated.
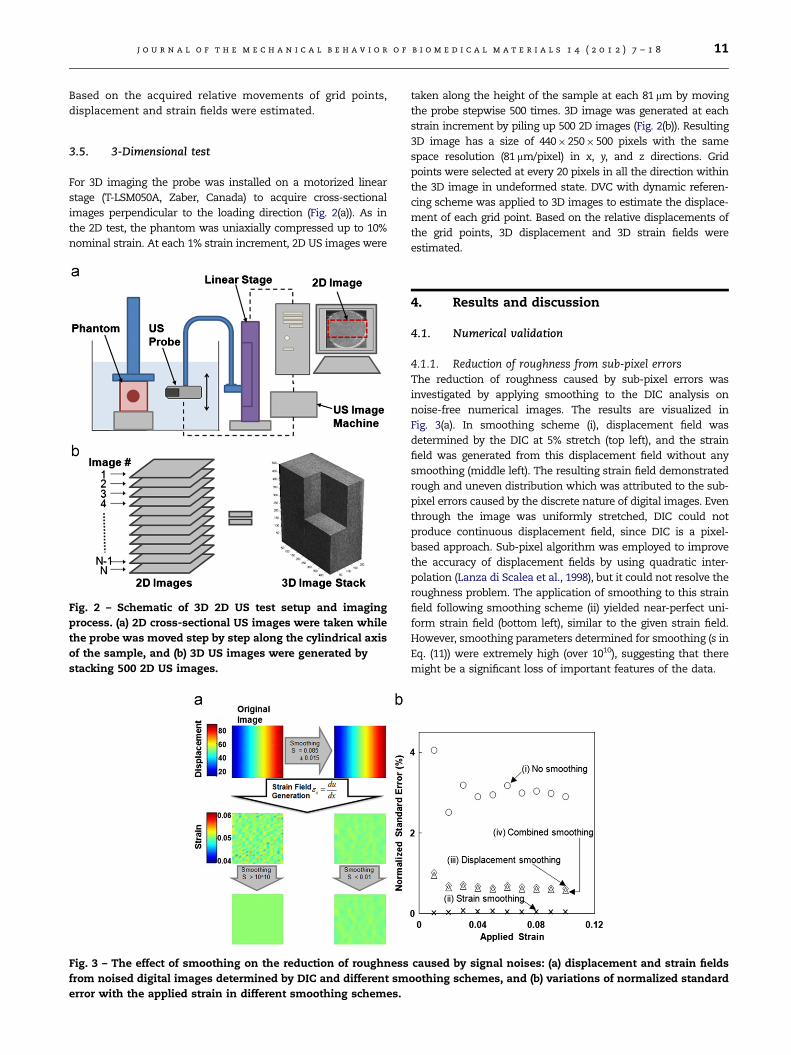
3.5. 3-Dimensional test
For 3D imaging the probe was installed on a motorized linear
stage (T-LSM050A, Zaber, Canada) to acquire cross-sectional
images perpendicular to the loading direction (Fig. 2(a)). As in
the 2D test, the phantom was uniaxially compressed up to 10%
nominal strain. At each 1% strain increment, 2D US images were
Fig. 2 – Schematic of 3D 2D US test setup and imaging
process. (a) 2D cross-sectional US images were taken while
the probe was moved step by step along the cylindrical axis
of the sample, and (b) 3D US images were generated by
stacking 500 2D US images.
Fig. 3 – The effect of smoothing on the reduction of roughness
from noised digital images determined by DIC and different sm
error with the applied strain in different smoothing schemes.
taken along the height of the sample at each 81 mm by moving
the probe stepwise 500 times. 3D image was generated at each
strain increment by piling up 500 2D images (Fig. 2(b)). Resulting
3D image has a size of 440�250�500 pixels with the same
space resolution (81 mm/pixel) in x, y, and z directions. Grid
points were selected at every 20 pixels in all the direction within
the 3D image in undeformed state. DVC with dynamic referen-
cing scheme was applied to 3D images to estimate the displace-
ment of each grid point. Based on the relative displacements of
the grid points, 3D displacement and 3D strain fields were
estimated.
4. Results and discussion
4.1. Numerical validation
4.1.1. Reduction of roughness from sub-pixel errorsThe reduction of roughness caused by sub-pixel errors was
investigated by applying smoothing to the DIC analysis on
noise-free numerical images. The results are visualized in
Fig. 3(a). In smoothing scheme (i), displacement field was
determined by the DIC at 5% stretch (top left), and the strain
field was generated from this displacement field without any
smoothing (middle left). The resulting strain field demonstrated
rough and uneven distribution which was attributed to the sub-
pixel errors caused by the discrete nature of digital images. Even
through the image was uniformly stretched, DIC could not
produce continuous displacement field, since DIC is a pixel-
based approach. Sub-pixel algorithm was employed to improve
the accuracy of displacement fields by using quadratic inter-
polation (Lanza di Scalea et al., 1998), but it could not resolve the
roughness problem. The application of smoothing to this strain
field following smoothing scheme (ii) yielded near-perfect uni-
form strain field (bottom left), similar to the given strain field.
However, smoothing parameters determined for smoothing (s in
Eq. (11)) were extremely high (over 1010), suggesting that there
might be a significant loss of important features of the data.
caused by signal noises: (a) displacement and strain fields
oothing schemes, and (b) variations of normalized standard

j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 812
In smoothing scheme (iii), displacement field was
smoothed first (top right in Fig. 3(a)), then the strain field
was generated from this displacement field (middle right).
Even though the effect of smoothing was almost invisible in
displacement field and the smoothing parameter s used for
displacement smoothing was very small (0.08570.015), the
strain field determined from this displacement field was
much more uniform than that from scheme (i). This suggests
that this smoothing scheme could effectively reduce the
small level of sub-pixel errors within the displacement field,
which greatly improved the roughness of strains while pre-
serving the main imprint of the original displacement data.
Application of smoothing to this strain field following
scheme (iv) slightly improved the quality of the strain field
with very small smoothing parameter of less than 0.01.
For the quantitative comparison of smoothing schemes,
standard error was normalized by the applied strain as
Errorð%Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPni ¼ 1 ðei�eappliedÞ
2
n
s�
100eapplied
ð12Þ
where n is the number of grid point, ei the measured strain at
i-th grid point, and eapplied the applied strain at each strain
increment.
The variation of normalized standard error with the increase
of strain was plotted for each smoothing scheme in Fig. 3(b). As
visualized in Fig. 3(a), scheme (iii) could decrease the error level
considerably compared to unsmoothed strain field. Scheme (iv)
reduced the error level even further, although the amount of
reduction was not significant. The error level from scheme (ii)
showed the lowest value; however, extremely high degree of
smoothing might have caused the loss of important feature and
the distortion of data. Therefore, considering both error level
and degree of smoothing, scheme (iv) (combined smoothing)
should be the most appropriate smoothing method to reduce
the roughness caused by sub-pixel errors.
4.1.2. Reduction of roughness from signal noisesTo investigate the effect of smoothing on the roughness
caused by signal noises, noises were manually introduced
to the numerical image. It was assumed that two kinds of
Fig. 4 – Schematic of the numerical imagi
noises exist: static and dynamic noises. Static noise repre-
sented noises that might originate from the reflection of
signal from some static components and did not change with
the degree of deformation. Dynamic noise was due to the
floating speckles in the liquid and varied randomly. As an
extreme case, noised images were formed by adding static
and dynamic noises to the original image, with ratio of 25%,
25% and 50% respectively. This image production process is
illustrated in Fig. 4. DIC was performed to the resulting
noised images and the results were smoothed following the
smoothing schemes in the previous section.
The results from the four smoothing schemes are shown in
Fig. 5(a) and (b). Apparently, noises disturbed the tracking
process of DIC and increased the roughness and the error level
in strain field. Compared to the standard errors in the strain
field without smoothing from noise-free images in Fig. 3(b),
those from noised images in Fig. 5(b) were much higher,
indicating that sub-pixel errors were amplified by signal
noises. This was particularly notable in small strain range
where standard errors were extremely high for unsmoothed
data. Since the displacement difference (DL) between adjacent
grid points was very small in this range (e.g. DL was less than
one pixel at 1% strain), strain was highly sensitive to noises.
On the other hand, the standard errors for noised image
after smoothing scheme (iii) did not show much variation
with the strain. Moreover, they were almost in the same
range as those for non-noised image in Fig. 3(b). This
indicates that by applying smoothing to the displacement
field, strain roughness caused by noises could be successfully
suppressed and the quality of strain fields could be signifi-
cantly improved. The result was further enhanced by
smoothing the strain fields from smoothed displacement
field (smoothing scheme (iv)) as illustrated by the insert in
Fig. 5(b). Again, the degree of smoothing in (ii) was extremely
high that the important information of data could be missed
or distorted; thus this scheme should not be suitable, parti-
cularly for the images with nonuniform strain field.
From the above simulation results, it was concluded that
(iv) combined smoothing should be the optimal smoothing
method that can be applied to DIC analysis to reduce the
roughness from both sub-pixel errors and signal noises.
ng process to produce noised images.

Fig. 5 – Effect of smoothing on the reduction of roughness caused by sub-pixel errors: (a) displacement and strain fields in
noise-free images determined by DIC and different smoothing schemes, and (b) variations of normalized standard error with
the applied strain in different smoothing schemes.
Fig. 6 – Engineering stress–strain curves for 20% (solid line)
and 5% (dotted) gelatin samples from simple compression
tests.
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8 13
4.2. Loading modulus
Representative engineering stress–strain curves from the
simple compression tests were shown in Fig. 6. Viscoelastic
behavior was demonstrated by the significant hysteresis
loops formed by loading and unloading curves in Fig. 6,
especially for 20% gelatin sample. Viscoelasticity is common
to many biological materials; thus, particular attention is
required in investigating the mechanical properties. In this
study, however, only loading curve was considered to avoid
complexity, since unloading did not occur in any of the tests
performed in this study. Note that loading curve might be
varied by the
Loading curves were regarded as linear with R squared
value of 0.9971 and 0.9849, for 20% and 5% gelatin content
samples, respectively. Loading modulus was determined to be
4772 kPa and 971 kPa for each content.
4.3. Displacement-gradient elastogram
2D displacement field and displacement-gradient elastogram
estimated by DIC at 1%, 5%, and 10% compressive strains are
presented with B-mode US image in Fig. 7. The existence of
inclusion can be recognized from both the displacement field
and the elastogram at each strain. Note that the displace-
ment fields are relatively smooth across the images at all
strains; however, elastograms derived from displacement
fields show highly rough and discontinuous strain distribu-
tions. This is because of the intrinsic sensitivity of strain
(displacement gradient) to noises and sub-pixel errors. The
roughness of strain field does not allow the accurate estima-
tion of the size and the stiffness of the inclusion.
Qualities of the elastograms could be improved by applying
smoothing algorithm to the DIC results, following the three
schemes in Section 3.1, i.e., strain smoothing, displacement
smoothing, and combined smoothing. The resulting elasto-
grams are shown in Fig. 8 with those without smoothing in
the first column. Roughness of strain field was significantly
reduced by all three schemes. Smoothed elastograms show
reasonably smooth strain fields and the circular-shaped low
strain region in the center can be clearly identified. Qualita-
tive comparison with the original shape of the inclusion
indicates that combined smoothing yielded the most satis-
factory result, as suggested by the numerical simulation in
Section 4.1.
By applying DVC to 3D US images, 3D displacement field
and 3D elastograms were produced. The results at 5% com-
pressive strain are presented in Fig. 9 3D images were
sectioned to better illustrate the internal state.
3D displacement field in Fig. 9(a) seems to be smoother
than 2D displacement field in Fig. 7. This is because DVC
considers all three directional displacements, while DIC
ignores the out-of-plane displacement; thus continuity of
the displacement field could be better maintained in 3D
displacement field. Slight distortion of the displacement field
in the central region suggests the existence of the inclusion;
however, the size or the modulus could not be estimated
from this image. The inclusion can be clearly recognized in
3D elastograms that were derived using 3D displacement
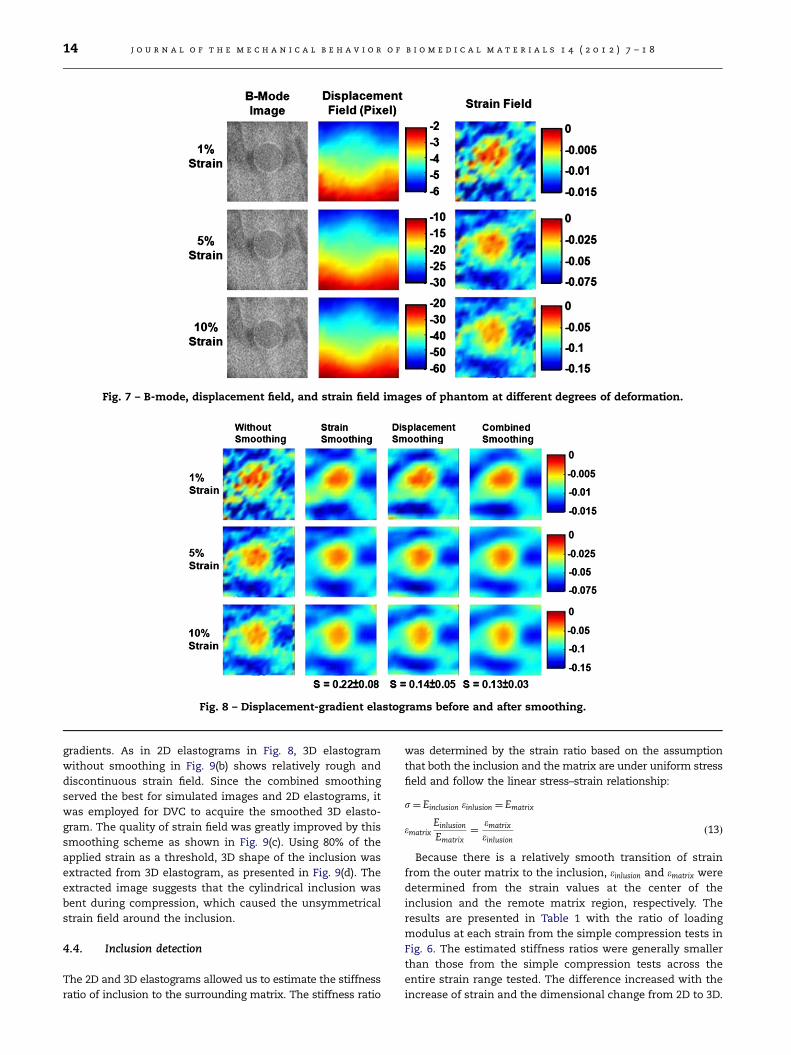
Fig. 7 – B-mode, displacement field, and strain field images of phantom at different degrees of deformation.
Fig. 8 – Displacement-gradient elastograms before and after smoothing.
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 814
gradients. As in 2D elastograms in Fig. 8, 3D elastogram
without smoothing in Fig. 9(b) shows relatively rough and
discontinuous strain field. Since the combined smoothing
served the best for simulated images and 2D elastograms, it
was employed for DVC to acquire the smoothed 3D elasto-
gram. The quality of strain field was greatly improved by this
smoothing scheme as shown in Fig. 9(c). Using 80% of the
applied strain as a threshold, 3D shape of the inclusion was
extracted from 3D elastogram, as presented in Fig. 9(d). The
extracted image suggests that the cylindrical inclusion was
bent during compression, which caused the unsymmetrical
strain field around the inclusion.
4.4. Inclusion detection
The 2D and 3D elastograms allowed us to estimate the stiffness
ratio of inclusion to the surrounding matrix. The stiffness ratio
was determined by the strain ratio based on the assumption
that both the inclusion and the matrix are under uniform stress
field and follow the linear stress–strain relationship:
s¼ Einclusion einlusion ¼ Ematrix
ematrixEinlusion
Ematrix¼
ematrix
einlusionð13Þ
Because there is a relatively smooth transition of strain
from the outer matrix to the inclusion, einlusion and ematrix were
determined from the strain values at the center of the
inclusion and the remote matrix region, respectively. The
results are presented in Table 1 with the ratio of loading
modulus at each strain from the simple compression tests in
Fig. 6. The estimated stiffness ratios were generally smaller
than those from the simple compression tests across the
entire strain range tested. The difference increased with the
increase of strain and the dimensional change from 2D to 3D.

Fig. 9 – (a) 3D displacement field, (b) 3D strain field without smoothing, (c) 3D strain field after combined smoothing, and
(d) extracted inclusion shape.
Table 1 – Relative stiffness of inclusion to the matrixestimated from elastograms.
Stiffness ratio (Einclusion/Ematrix)
Strain (%) 2D 3D Simple compression
1 3.4 2.4 5.0
5 3.1 2.2 4.8
10 2.7 2.0 4.7
Table 2 – Diameter of inclusion estimated fromelastograms.
Inclusion diameter (mm)
Threshold 80% 50% Actual
Strain (%) 2D 3D 2D 3D
1 8.8 6.8 9.2 8.2 8.6
5 7.2 5.3 8.8 7.5
10 7.2 5.2 8.8 7.4
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8 15
The difference may be caused by multiple factors such as
pulling boundary condition on the inclusion, over-smoothing,
and gelatin diffusion. To estimate the stiffness ratio, the strain
at the center of the inclusion and that of the matrix in the
remote region were compared, based on the assumption they
were the under same stress state. However, since the boundary
of the inclusion was bonded to the matrix which was much
more compliant, larger deformation in the matrix developed
the downward pulling force exerted on the boundaries of the
inclusion. As a result, the deformation in the inclusion was
larger than that in free boundary condition; thus the measured
modulus was smaller than that from simple compression test.
This is the opposite stress state to the plane strain condition
with fixed boundaries which yields higher apparent modulus
than that of plane stress condition with free boundaries.
The difference of gelatin content in the inclusion and the
matrix might have caused gelatin diffusion during fabrication
and the ensuing storage process. When the phantom was
fabricated, the gelled inclusion containing 20 wt% gelatin was
placed into matrix solution with 5 wt% gelatin content. Due
to the difference in the contents, gelatin diffusion might
happen during the gelation of the matrix, from the inclusion
to the matrix, resulting in the decrease of inclusion stiffness.
Also, smoothing of strain fields might lessen the contrast
between hard and soft materials, in addition to the intended
reduction of the roughness in the strain fields.
Diameters of the inclusion estimated by using 80% and 50%
of the applied strain as thresholds were presented in Table 2.
Note that inclusion size was varied by the threshold value,
with larger diameter by lower threshold value. When 50% of
the applied strain was employed as a threshold, most
accurate inclusion size was obtained. Similar to stiffness
ratios, estimated inclusion size in 3D was generally smaller
than that in 2D at all strains.
4.5. Inclusion size overestimation
Ophir et al. (1996) reported that the size of the tumor
determined by elastogram was significantly larger than that
by sonogram, only when the tumors are carcinomas. They
hypothesized that since carcinomas elicited a desmoplastic
reaction in the surrounding normal tissue, the size

j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 816
overestimation might be due to the desmoplasia, which
causes hardening of the normal tissues around the cancer.
Size overestimation due to desmoplasia was mimicked by
varying the boundary layer formed by gelatin diffusion during
phantom fabrication process in Fig. 1(c). Gelatin diffusion was
promoted by increasing the surface-to-volume ratio, which
could be achieved by decreasing the inclusion size and
changing the inclusion shape from circular to non-circular.
For this, cylindrical inclusion prepared by the protocols
described in Section 3.2 was cut into a half-cylindrical and
a quarter-cylindrical shape. Surface-to-volume ratio of a full-,
a half-, and a quarter-cylindrical inclusion was 2/r, and (2þ4/
p)/r and (2þ8/p)/r, i.e., 0.23 mm�1, 0.38 mm�1 and 0.53 mm�1,
respectively. Phantoms were made using these inclusions
and their 2D elastograms were created by applying combined
smoothing. Post-destructive investigation qualitatively con-
firmed that the ratio of boundary layer to entire volume was
relatively proportional to surface-to-volume ratio.
B-mode US and elastogram images of the phantoms con-
taining different inclusions are illustrated in Fig. 10. The
position of the inclusion obtained from B-mode images is
indicated in the elastogram by solid black lines. Comparisons
between the elastograms with different inclusions suggest
that as the size of inclusion was decreased, the contrast
between the inclusion and the matrix became indistinct. This
is quantified in Table 3 which presents the decrease of
stiffness ratio with the decrease of size of inclusion. In a
quarter-cylindrical inclusion, almost the entire volume was
affected by diffusion; therefore, strain difference between the
inclusion and the matrix was much smaller than that in an
inclusion with a lower surface-to-volume ratio. The shape of
the inclusion was also blurred, resulting in the over-estimation
Fig. 10 – B-mode images and elastograms of a fu
Table 3 – Relative stiffness of various inclusions to the matrix
Stiffness ratio (Einclusion/Ematrix)
Inclusion (%) Full cylinder Half cylinder
1 3.4 2.8
5 3.1 2.5
10 2.7 2.4
of inclusion size in the elastogram. These results suggest that
as the bonding between the inclusion and the matrix such as
boundary layer or desmoplasia increases, the shape of the
inclusion becomes less vivid and the size of the inclusion tends
to be overestimated in the elstogram, which is consistent with
the report by Ophir et al. (1996).
4.6. Applications
Usually, malignant tumors are harder than benign tissues
(Ophir et al., 1999) and therefore time-gradient elastograms
have been frequently used to detect carcinomas (Krouskop
et al., 1998; Parker et al., 2011). However, because of relatively
poor resolution of conventional time-gradient elastograms,
the application has been limited to qualitative diagnosis of
diseased lesion, even though it has the advantage of real time
imaging capability. The displacement-gradient elastogram
proposed in this study has more flexibility in employing
reference schemes (dynamic or fixed referencing) and
smoothing function; thus it can have better resolution and
can detect the size and the relative modulus of the stiff lesion
with a better accuracy. They can also be applied to acquire 3D
elastograms that can provide information on 3D shape and
3D stiffness variation of the stiff lesion. Currently, the
computation required to acquire displacement-gradient elas-
togram is too intensive to be performed in real-time, but the
rapid growth of computing power may soon make the real-
time processing available. Real-time 3D displacement-gradi-
ent elastogram can be used congruently with other medical
practices such as biopsy. When a suspected cyst is found by
modalities such as mammogram or MRI, biopsy is frequently
ll, a half and a quarter cylindrical inclusions.
from 2D elastograms.
Quarter cylinder Simple compression
2.3 5.0
2.2 4.8
2.1 4.7
j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 8 17
conducted to sample fluid or remove clusters of cells. In this
practice, the information on the location and the shape of the
suspected cyst is critical. 3D elastogram proposed in this study
can be used as a guide to perform accurate biopsy practice.
5. Conclusions
Digital image correlation algorithm was applied to produce
2D and 3D displacement field and strain fields. Strain field
can be significantly improved by employing smoothing func-
tion. The stiffness ratio of inclusion to that of surrounding
matrix and the diameter of inclusion within the phantom
were estimated from displacement-gradient elastogram with
a reasonable accuracy.
This study suggests the potential application of DIC and
DVC algorithms implemented with smoothing function to the
in-vivo diagnosis of pathological tissue within the body, and
to provide new information that is related to tissue structure
and or pathology.
Acknowledgments
The work was sponsored by Natural Sciences and Engineer-
ing Research Council of Canada (NSERC).
r e f e r e n c e s
Bilgen, M., Insana, M.F., 1997. Error analysis in acoustic elasto-graphy. II. Strain estimation and SNR analysis. The Journal ofthe Acoustical Society of America 101, 1147–1154.
Chu, T.C., Ranson, W.F., Sutton, M.A., Peters, W.H., 1985. Applica-tions of digital-image-correlation techniques to experimentalmechanics. Experimental Mechanics 25, 232–244.
Doyley, M., 2001. A freehand elastographic imaging approach forclinical breast imaging: system development and perfor-mance evaluation. Ultrasound in Medicine and Biology 27,1347–1357.
Garcia, D., 2010. Robust smoothing of gridded data in one andhigher dimensions with missing values. Computational Sta-tistics and Data Analysis 54, 1167–1178.
Hall, T.J., 2003. AAPM/RSNA physics tutorial for residents: Topicsin US. Beyond the basics: elasticity imaging with US. Radio-graphics: a Review Publication of the Radiological Society ofNorth America, Inc 23, 1657–1671.
Han, Y., Rogalsky, A.D., Zhao, B., Kwon, H.J., 2011. The applicationof digital image techniques to determine the largestress–strain behaviors of soft materials. Polymer Engineeringand Science Online.
Jemal, A., Siegel, R., Xu, J., Ward, E., 2011. Cancer statistics, 2010.CA: a Cancer Journal for Clinicians 60, 277–300.
Krouskop, T.A., Wheeler, T., Kallel, F., Garra, B., 1998. Elasticmoduli of breast and prostate tissues under compression.Ultrasonic Imaging 20, 260–274.
Kumar, K., Andrews, M.E., Jayashankar, V., Mishra, A.K., 2009.Improvement in diagnosis of breast tumour using ultrasoundelastography and echography: A phantom based analysis.Biomedical Imaging and Intervention Journal 5 (e30), 1–6.
Kwon, H.J., Rogalsky, A.D., Kovalchick, C., Ravichandran, G., 2010.Application of digital image correlation method to biogel.Polymer Engineering and Science 50, 17–20.
Lanza di Scalea, F., Hong, S.S., Cloud, G.L., 1998. Whole-field strainmeasurement in a pin-loaded plate by electronic specklepattern interferometry and the finite element method. Experi-mental Mechanics 38, 55–60.
Lee, A.W.C., Rajagopal, V., Chung, J.-H., Nielsen, P.M.F., 2010a.Method for validating breast compression models using nor-malised cross-correlation. Computer Methods in Biomecha-nics and Biomedical Engineering 1, 63–71.
Lee, C.H., Dershaw, D.D., Kopans, D., Evans, P., Monsees, B.,Monticciolo, D., Brenner, R.J., Bassett, L., Berg, W., Feig, S.,Hendrick, E., Mendelson, E., D’Orsi, C., Sickles, E., Burhenne,W.D., 2010b. Breast cancer screening with imaging: Recom-mendations from the Society of Breast Imaging and the ACRon the use of mammography, breast MRI, breast ultrasound,and other technologies for the detection of clinically occultbreast cancer. Journal of the American College of Radiology:JACR 7, 18–27.
Lewis, J.P., 1995. Fast template matching, Vision Interface 95.Canadian Image Processing and Pattern Recognition Society,Quebec City, Canada 120-123.
Lyshchik, A., Higashi, T., Asato, R., Tanaka, S., Ito, J., Mai, J.J.,Pellot-Barakat, C., Insana, M.F., Brill, A.B., Saga, T., Hiraoka, M.,Togashi, K., 2005. Thyroid gland tumor diagnosis at USelastography. Radiology 237, 202–211.
Madsen, E.L., Zagzebski, J.A., Frank, G.R., 1982. An anthropo-morphic ultrasound breast phantom containing intermediate-sized scatterers. Ultrasound in Medicine and Biology 8, 381–392.
Milan, A., 2011, Mortality: Causes of death, 2007, Component ofStatistics Canada Catalogue no. 91-209-X, Report on theDemographic Situation in Canada, Statistics Canada.
Ophir, J., Alam, S.K., Garra, B.S., Kallel, F., Konofagou, E.E.,Krouskop, T., Merritt, C.R.B., Righetti, R., Souchon, R., Sriniva-san, S., Varghese, T., 2002. Elastography: Imaging the elasticproperties of soft tissues with ultrasound. Journal of MedicalUltrasonics 29, 155–171.
Ophir, J., Alam, S.K., Garra, B., Kallel, F., Konofagou, E., Krouskop,T., Varghese, T., 1999. Elastography: ultrasonic estimation andimaging of the elastic properties of tissues. Proceedings of theInstitution of Mechanical Engineers—Part H: Journal of Engi-neering in Medicine 213, 203–233.
Ophir, J., Cespedes, I., Garra, B., Ponnekanti, H., Huang, Y.,Maklad, N., 1996. Elastography: Ultrasonic imaging of tissuestrain and elastic modulus in vivo. European Journal ofUltrasound: Official Journal of the European Federation ofSocieties for Ultrasound in Medicine and Biology 3, 49–70.
Parker, K.J., Doyley, M.M., Rubens, D.J., 2011. Imaging the elasticproperties of tissue: the 20 year perspective. Physics inMedicine and Biology 56 513-513.
Rago, T., Santini, F., Scutari, M., Pinchera, A, Vitti, P., 2007.Elastography: new developments in ultrasound for predictingmalignancy in thyroid nodules. The Journal of Clinical Endo-crinology and Metabolism 92, 2917–2922.
Sanches, J.M., Nascimento, J.C., Marques, J.S., 2008. Medical imagenoise reduction using the Sylvester-Lyapunov equation. IEEETransactions on Image Processing: a Publication of the IEEESignal Processing Society 17, 1522–1539.
Sarvazyan, A., 1993. Shear acoustic properties of soft biologicaltissues in medical diagnostics. The Journal of the AcousticalSociety of America 93, 2329–2330.
Skrabanek, P., 1989. Mass mammography: the time for reapprai-sal. International Journal of Technology Assessment in HealthCare 5, 423–430.
Smith, R.A., Cokkinides, V., Eyre, H.J., 2003. American CancerSociety guidelines for the early detection of cancer, 2006. CA: aCancer Journal for Clinicians 56, 11–25.
Strang, G., 1999. The discrete cosine transform. Siam Review 41,135–147.

j o u r n a l o f t h e m e c h a n i c a l b e h a v i o r o f b i o m e d i c a l m a t e r i a l s 1 4 ( 2 0 1 2 ) 7 – 1 818
Sudha, S., Suresh, G.R., Sukanesh, R., 2009. Speckle Noise reduc-tion in ultrasound images by wavelet thresholding based onweighted variance. International Journal of Computer Theoryand. Engineering 1, 7–12.
Verhulp, E., van Rietbergen, B., Huiskes, R., 2004. A three-dimensionaldigital image correlation technique for strain measurements inmicrostructures. Journal of Biomechanics 37, 1313–1320.
Wahba, G., 1990. Spline Models for Observational Data, CBMS-NSFRegional Conference Series in Applied Mathematics 59, Phila-delphia: SIAM: Society for Industrial and Applied Mathe-matics, pp. 45–65.
Weinert, H.L., 2007. Efficient computation for Whittaker–Henderson smoothing. Computational Statistics and DataAnalysis 52, 959–974.
Zhang, D., Arola, D.D., 2004. Applications of digital image correla-tion to biological tissues. Journal of Biomedical Optics 9,691–699.
Zhi, H., Ou, B., Luo, B.-M., Feng, X., Wen, Y.-L., Yang, H.-Y., 2007.Comparison of ultrasound elastography, mammography, andsonography in the diagnosis of solid breast lesions. Journal ofUltrasound in Medicine: Official Journal of the AmericanInstitute of Ultrasound in Medicine 26, 807–815.


















