
API User Guide (.Net Remoting)faremo.pmc.org.tw/RegisterServer/AppFiles/Help/SkyMars API Remoting...
184
Precision Machinery Research Development Center - Intelligent technology department 1 API User Guide (.Net Remoting) (Corresponding to SkyMars Professional / Express 3.06 above) . Version 3.06 2014/5/9 +
Transcript of API User Guide (.Net Remoting)faremo.pmc.org.tw/RegisterServer/AppFiles/Help/SkyMars API Remoting...
Precision Machinery Research Development Center - Intelligent technology department
1
API User Guide
(.Net Remoting)
(Corresponding to SkyMars Professional / Express 3.06 above)
.
Version 3.06
2014/5/9
+
Precision Machinery Research Development Center - Intelligent technology department
2
Contents
I. SkyMars Professional Archtecture ........................................................................................... 8
II. Developer’s required add-on components ................................................................................ 9
1. Add reference System.Runtime.Remoting ....................................................................... 9
2. Add reference InterfaceLib.dll ......................................................................................... 9
III. .Net Remoting pre-code ......................................................................................................... 10
1. Create a namespace and import the Remoting API support and SkyMars Interface ........ 10
2. Register the .Net Remoting channel and bind to it. ......................................................... 10
3. Reference following code: ............................................................................................. 10
4. How do I know the number of machines connected of SkyMars? ................................... 11
IV. Error Code and details ........................................................................................................... 13
V. FTP Error List ....................................................................................................................... 15
VI. Internal-info class function .................................................................................................... 17
1. SKY_version: Get SkyMar’s version and USB Key info ................................................ 17
2. SKY_conn_status: Get Connection status of CNC ......................................................... 17
3. SKY_conn_ip_port: Get CNC IP, port and other corelation info .................................... 18
4. SKY_nc_filename: Get CNC NC Filename ................................................................... 19
5. SKY_conn_count: Get SkyMars connection number ..................................................... 20
VII. Basic Type of Function .......................................................................................................... 22
1. GET_information: Basic Information of Correlation ...................................................... 22
2. GET_information_heid: Basic information of HEIDENHAIN controller ....................... 23
3. GET_status: Status information ..................................................................................... 24
4. GET_position: Coordinate Status ................................................................................... 25
5. GET_gcode: G Code...................................................................................................... 26
6. GET_othercode: Other Codes(H Code,D Code,T Code,M Code,B Code,F Code,S Code)
27
7. GET_feed_spindle: Feed rate / Spindle speed ................................................................ 28
8. GET_time: Time ............................................................................................................ 29
9. GET_time_heid: The ime of HEIDENHAIN Controller ................................................. 30
10. GET_time_cnc: Get the time of controller system .................................................. 31
11. GET_part_count: The count of part ........................................................................ 32
12. GET_part_total: ..................................................................................................... 33
13. GET_part_required: ............................................................................................... 33
14. SET_relpos: Set relative coordinate........................................................................ 34
15. SET_time_cnc: Set controller time ......................................................................... 35
VIII. The functions of Alert ............................................................................................................ 37
1. GET_alm_current: Current occurring alarm ................................................................... 37
2. GET_alm_current2: Current occurring alarm ................................................................. 37
3. GET_alm_current_heid: Get the current alarm of HEIDENHAIN controller .................. 39
Precision Machinery Research Development Center - Intelligent technology department
3
4. GET_alm_history: History of Alarms ............................................................................ 40
5. GET_alm_history2: History of Alarms........................................................................... 41
6. GET_alm_history_heid: History of Alarm for HEIDENHAIN Controller ...................... 42
7. GET_msg_current: Get the message of operation........................................................... 44
8. GET_msg_history: Get History of Operation ................................................................. 45
9. GET_plc_alarm: Get History of PLC Alarm .................................................................. 45
IX. The Functions of Servo Spindle ............................................................................................. 47
1. GET_servo_current: Current Loads of All Spindles ....................................................... 47
2. GET_servo_load: Get the percentage of servo load (%) ................................................. 47
3. GET_servo_speed: Get Servo Speed .............................................................................. 48
4. GET_spindle_load: Get the percentage of Spindle load (%) ........................................... 49
5. GET_spindle_speed: Get Spindle Speed ........................................................................ 50
6. GET_servo_temperature: Get the temperature of servo motor ........................................ 51
7. GET_spindle_temperature: Get the temperature of spindle ............................................ 52
X. The Functions of Tool Management (Controller) ................................................................... 53
1. GET_offset_title: Get the title of tool offset ................................................................... 53
2. GET_offset_all: Get the Offset of all tools ..................................................................... 54
3. GET_offset_scope: Get the tool offset according to designated scope ............................ 55
4. GET_offset_single: Get the Offset of a single tool ......................................................... 57
5. SET_offset_all: Write the Offsets of all tools ................................................................. 58
6. SET_offset_single: Write the Offset of a single tool ....................................................... 59
7. GET_offset_count: Get the count of offsets ................................................................... 60
8. GET_tool_title: Get the title of tool management ........................................................... 61
9. GET_tool_count: Get the count of Tool ......................................................................... 61
10. GET_tool_data: Get the data of all tool management ............................................. 62
11. GET_tool_data_mem: Get tool data and send the data into SkyMars memory ........ 63
12. GET_tool_data_scope: Get the data of Tool management and return the data of
indicated index ...................................................................................................................... 64
13. SET_tool_data: Write the data of management tool ................................................ 65
14. GET_pocket_title: Get the title of tool pocket ........................................................ 66
15. GET_pocket_count: Get the count of tool pocket ................................................... 67
16. GET_pocket_data: Get the data of Tool Pocket ...................................................... 68
17. SET_pocket_data: Write the data of tool pocket ..................................................... 69
18. GET_pocket_data_mem: Get the data from tool pocket, and write the data into
SkyMars memory .................................................................................................................. 70
19. GET_pocket_data_scope: Get the data of tool pocket, and return the data of
indicated index ...................................................................................................................... 71
XI. The Functions of Work Coordinates....................................................................................... 73
1. GET_work_coord_title: Get the title of work coordinates .............................................. 73
2. GET_work_coord_all: Get the data of all work coordinates ........................................... 73

Precision Machinery Research Development Center - Intelligent technology department
4
3. GET_work_coord_scope: Get the data of work coordinate by using indicated scope ...... 75
4. GET_work_coord_single: Get the data of a single work coordinate ............................... 76
5. SET_work_coord_all: Write the data of all work coordinates ......................................... 77
6. SET_work_coord_single: Write the data of a single workpiece coordinate ..................... 78
7. GET_work_coord_count: Get the count of workpiece coordinate .................................. 80
8. GET_preset_title: Get title of the program table ............................................................. 80
9. GET_preset_count: Get count of the program table ........................................................ 81
10. GET_preset_data: Get data of the program table .................................................... 82
11. SET_preset_data: Write data to a program table ..................................................... 84
12. GET_preset_data_mem: Get the program table, and save it in SkyMars memory ... 85
13. GET_preset_data_scope: Get data of the program table, and return it by indicated
index 86
XII. The Functions of Macro Variables (Common Variables) ........................................................ 88
1. GET_macro_all: Get all Macro (Common Variables) variables data ............................... 88
2. GET_macro_scope: Get Macro (Common Variable) variable data by scope indication ... 89
3. SET_macro_all: Set all Macro (Common Variable) variable data ................................... 90
4. GET_macro_single: Get single Macro (Common Variable) variable data ....................... 91
5. SET_macro_single: Set single Macro (Common Variable) variable data ........................ 92
6. GET_macro_variable: Get Macro (Common Variable) variable type .............................. 93
7. GET_pcode_single: Get single P-Code variable value (FANUC) ................................... 94
8. SET_pcode_single: Write single P-Code variable value (FANUC) ................................. 95
XIII. The Functions of NC Program ............................................................................................... 97
1. GET_nc_mem_list: Get the NC list from machine (memory) ......................................... 97
2. GET_nc_ftp_list: Get NC list from FTP ......................................................................... 98
3. GET_nc_mem_code: Get the content of NC from memory ............................................ 99
4. GET_nc_ftp_code: Get the content of NC from FTP.................................................... 100
5. UPLOAD_nc_mem: Upload NC to memory ................................................................ 101
6. UPLOAD_nc_ftp: Upload NC to FTP ....................................................................... 102
7. DEL_nc_mem: Delect NC from memory ..................................................................... 103
8. DEL_nc_ftp: Delect NC from FTP .............................................................................. 104
9. GET_nc_pointer: Get the pointer of the current NC ..................................................... 105
10. GET_nc_current_block: Get the current and next block of NC ............................. 107
11. GET_nc_freespace: Get free space of NC ............................................................ 108
12. SET_nc_main: Set or assign NC to main program ................................................ 109
13. UPLOAD_nc_mdi: Upload MDI NC program to Controller (MDI mode) ............ 109
XIV. The Functions of System parameter ......................................................................................111
1. GET_param_max: Get the Max number of the parameters (Or the last number)............111
2. GET_param_data: Get the parameter data .....................................................................111
3. SET_param_data: Set the parameter data ..................................................................... 115
XV. The Functions of PLC ......................................................................................................... 117
Precision Machinery Research Development Center - Intelligent technology department
5
1. GET_plc_ver: Get the version information of PLC ...................................................... 117
2. GET_plc_addr: Get the PLC address of start or end number ........................................ 117
3. GET_plc_addr2: Get the PLC address of start or end number ...................................... 119
4. GET_plc_status: Get the status of PLC ........................................................................ 120
5. GET_plc_status2: Get the status of PLC ...................................................................... 121
6. SET_plc_status: Set the status of PLC ......................................................................... 123
7. SET_plc_status2: Set the status of PLC ....................................................................... 125
XVI. The Functions of Files Management ............................................................................ 127
1. GET_file_directory: Get files and directories on controller .......................................... 127
2. UPLOAD_file2: Upload file from PC side to controller ............................................... 128
3. DOWNLOAD_file2: Download file from controller side to PC side ............................ 128
4. DEL_file: Delete file from controller ........................................................................... 129
XVII. The Functions of National Instruments 9233 (Accelerometer module) (Currently
disabled function.) ..................................................................................................................... 131
1. START_ni9233_get_data: Start module for data acquisition ........................................ 131
2. STOP_ni9233_get_data: Stop Data Acquisition ........................................................... 132
3. CHECK_ni9233_running: Check if DataAcquisition is running ................................... 132
4. GET_ni9233_spectrum_data: Get the data from NI 9233 ............................................. 133
5. GET_ni9233_error_msg: Get the error message of NI 9233 ......................................... 134
XVIII. The Function of RS232 Module ................................................................................... 136
1. GET_rs232_status: Get the status and parameters of RS232 ........................................ 136
2. OPEN_rs232: Open RS232 .......................................................................................... 137
3. SET_rs232: Set data into RS232 .................................................................................. 139
4. CHECK_rs232_data_received: Check if RS232 received data (IsOnCallbackEvent=true)
140
5. GET_rs232_data_received: Get the data from RS232 received .................................... 140
6. CLOSE_rs232: Close RS232 ....................................................................................... 141
7. GET_rs232_error_msg: Get the error message from RS-232........................................ 141
XIX. PC Camera Module Class(USB) .................................................................................. 143
1. CONNECT_cam: Connect to the camera ..................................................................... 143
2. DISCONNECT_cam: Disconnect the camera .............................................................. 143
3. CHECK_cam_running: Check if the camera gets connected and ready to capture vedios
144
4. GET_cam_image: Get a image from the camera .......................................................... 144
5. GET_cam_error: Get exception error of the camera ..................................................... 145
XX. SkyMars Professional Event Delegate ................................................................................. 147
1. EVENT_conn_cnc: Create an event happened after setting CNC info through SkyMars
Professional ......................................................................................................................... 148
2. EVENT_disconn_cnc: Create an event when CNC is disconnected through SkyMars
Professional ......................................................................................................................... 149

Precision Machinery Research Development Center - Intelligent technology department
6
3. EVENT_conn_status: Create an event of CNC status(OFF、RUN、IDLE、ALARM)
150
4. EVENT_nc_filename: Create an event of CNC changing NC filename ........................ 151
XXI. SkyMars Utilization Rate Data .................................................................................... 153
1. GET_utilization_all_today: Get today’s utilization rate data ........................................ 153
2. GET_utilization_single_time: Get a single machine utilization rate data based on time 154
3. GET_utilization_single_total: Get a single machine utilization rate data based on total
running counts(part counts and cycle times) ........................................................................ 155
4. GET_utilization_single_list: Get a single machine utilization rate historical data ......... 156
5. GET_utilization_single_all: Get a single machine all utilization rate data .................... 158
XXII. The Function of SkyMars Maintenance Management................................................... 161
1. GET_maint_count: Get maintenance management total count...................................... 161
2. GET_maint_title: Get maintenance management title .................................................. 161
3. GET_maint_all: Get maintenance management all data ............................................... 162
4. GET_maint_all_time: Get maintenance management all time (use time and life time) . 163
5. GET_maint_single: Get single maintenance management data ..................................... 164
6. GET_maint_single_time: Get single maintenance management time data (use time and
life time) ............................................................................................................................. 165
7. ADD_maint_single: Add single maintenance management data ................................... 165
8. SET_maint_single: Modify single maintenance management data ............................... 167
9. DEL_maint_single: Delete single maintenance management data ................................ 168
10. SET_maint_single_usetime: Modify single maintenance management use time ... 169
11. SET_maint_single_zero: Reset single maintenance management use time............ 169
XXIII. The Function of SkyMars Tool Management ............................................................... 171
1. GET_toolmanage_count: Get tool management total count .......................................... 171
2. GET_toolmanage_title2: Get tool management title ..................................................... 171
3. GET_toolmanage_all2: Get all tool management data .................................................. 172
4. GET_toolmanage_all_execute: Get all tool management cycle time, life time, part count
and life part count data ........................................................................................................ 173
5. GET_toolmanage_single2: Get single tool management data ....................................... 174
6. GET_toolmanage_single_execute: Get single tool management cycle time, life time, part
count and life part count data ............................................................................................... 175
7. ADD_toolmanage_single2: Add single tool management data ..................................... 176
8. SET_toolmanage_single2: Modify single tool management data .................................. 177
9. DEL_toolmanage_single: Delete single tool management data .................................... 179
10. SET_toolmanage_single_cycletime: Set single tool management cycle time ........ 179
11. SET_toolmanage_single_partcount: Set single tool management part count ......... 180
12. SET_toolmanage_single_zero: Reset for single tool management cycle time ....... 181
13. SET_toolmanage_single_zero_partcount: Reset single tool management part count
181

Precision Machinery Research Development Center - Intelligent technology department
7
XXIV. SkyMars APP Piracy-Proof Method ............................................................................. 183
XXV. Question & Answer ..................................................................................................... 184
Precision Machinery Research Development Center - Intelligent technology department
8
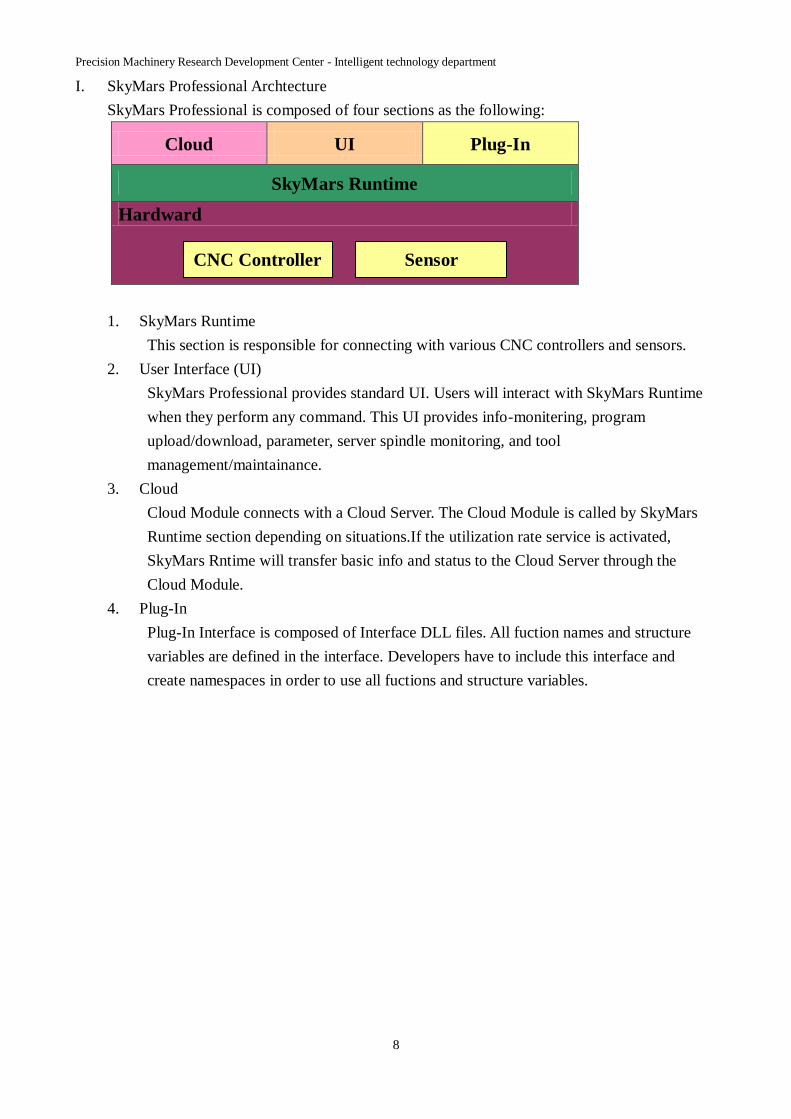
I. SkyMars Professional Archtecture
SkyMars Professional is composed of four sections as the following:
Cloud UI Plug-In
SkyMars Runtime
Hardward
1. SkyMars Runtime
This section is responsible for connecting with various CNC controllers and sensors.
2. User Interface (UI)
SkyMars Professional provides standard UI. Users will interact with SkyMars Runtime
when they perform any command. This UI provides info-monitering, program
upload/download, parameter, server spindle monitoring, and tool
management/maintainance.
3. Cloud
Cloud Module connects with a Cloud Server. The Cloud Module is called by SkyMars
Runtime section depending on situations.If the utilization rate service is activated,
SkyMars Rntime will transfer basic info and status to the Cloud Server through the
Cloud Module.
4. Plug-In
Plug-In Interface is composed of Interface DLL files. All fuction names and structure
variables are defined in the interface. Developers have to include this interface and
create namespaces in order to use all fuctions and structure variables.
CNC Controller Sensor

Precision Machinery Research Development Center - Intelligent technology department
9
II. Developer’s required add-on components
1. Add reference System.Runtime.Remoting
As shown below, select System.Runtime.Remoting.
2. Add reference InterfaceLib.dll
Copy InterfaceLib.dll to the project execute folder, and add it as a reference.
Precision Machinery Research Development Center - Intelligent technology department
10
III. .Net Remoting pre-code
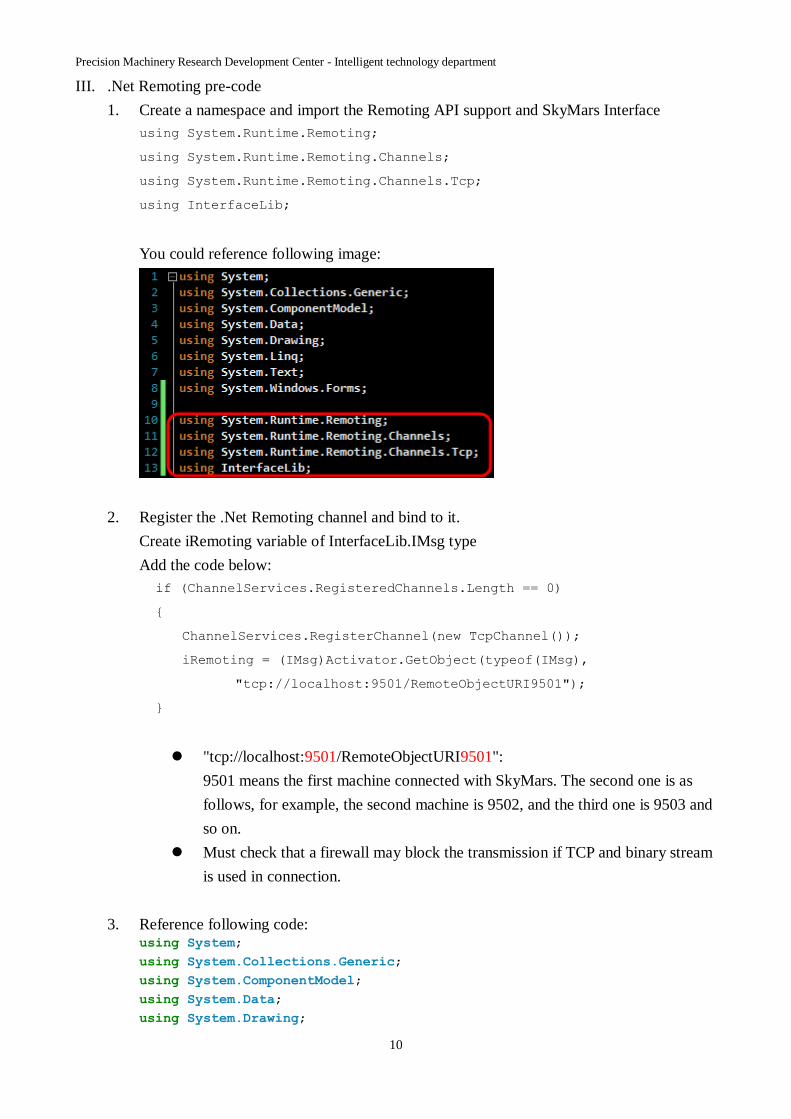
1. Create a namespace and import the Remoting API support and SkyMars Interface
using System.Runtime.Remoting;
using System.Runtime.Remoting.Channels;
using System.Runtime.Remoting.Channels.Tcp;
using InterfaceLib;
You could reference following image:
2. Register the .Net Remoting channel and bind to it.
Create iRemoting variable of InterfaceLib.IMsg type
Add the code below:
if (ChannelServices.RegisteredChannels.Length == 0)
{
ChannelServices.RegisterChannel(new TcpChannel());
iRemoting = (IMsg)Activator.GetObject(typeof(IMsg),
"tcp://localhost:9501/RemoteObjectURI9501");
}
"tcp://localhost:9501/RemoteObjectURI9501":
9501 means the first machine connected with SkyMars. The second one is as
follows, for example, the second machine is 9502, and the third one is 9503 and
so on.
Must check that a firewall may block the transmission if TCP and binary stream
is used in connection.
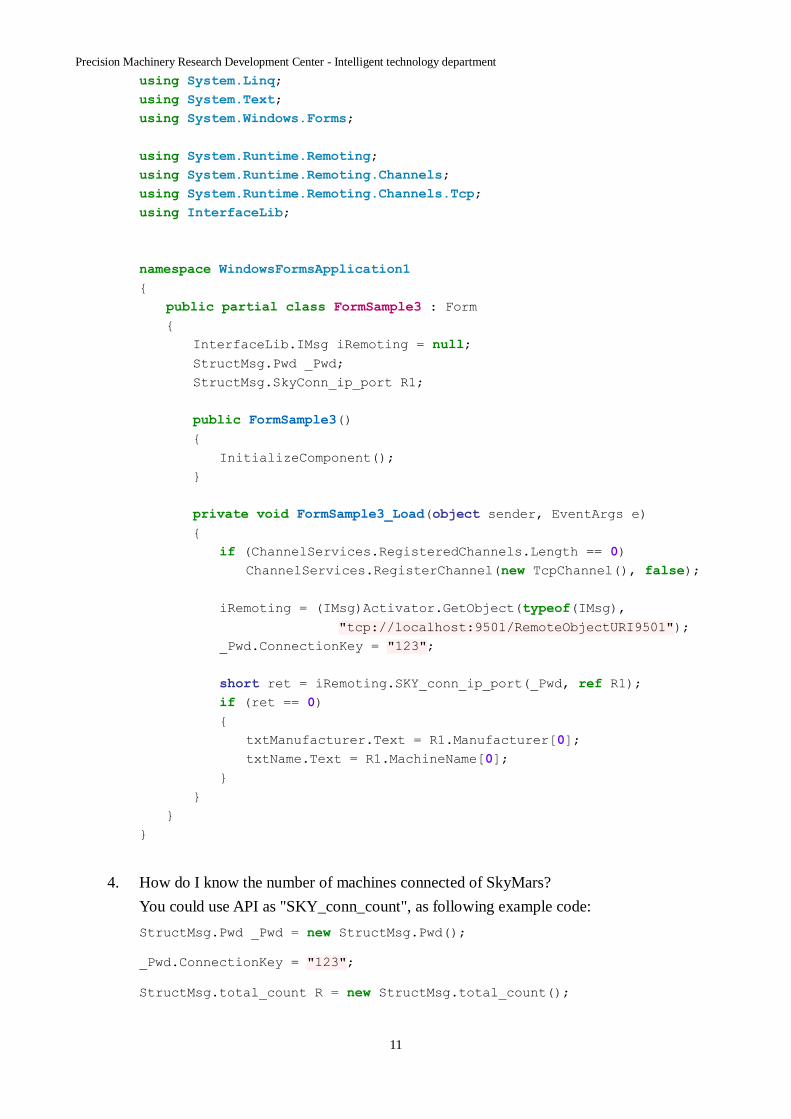
3. Reference following code: using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
Precision Machinery Research Development Center - Intelligent technology department
11
using System.Linq;
using System.Text;
using System.Windows.Forms;
using System.Runtime.Remoting;
using System.Runtime.Remoting.Channels;
using System.Runtime.Remoting.Channels.Tcp;
using InterfaceLib;
namespace WindowsFormsApplication1
{
public partial class FormSample3 : Form
{
InterfaceLib.IMsg iRemoting = null;
StructMsg.Pwd _Pwd;
StructMsg.SkyConn_ip_port R1;
public FormSample3()
{
InitializeComponent();
}
private void FormSample3_Load(object sender, EventArgs e)
{
if (ChannelServices.RegisteredChannels.Length == 0)
ChannelServices.RegisterChannel(new TcpChannel(), false);
iRemoting = (IMsg)Activator.GetObject(typeof(IMsg),
"tcp://localhost:9501/RemoteObjectURI9501");
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SKY_conn_ip_port(_Pwd, ref R1);
if (ret == 0)
{
txtManufacturer.Text = R1.Manufacturer[0];
txtName.Text = R1.MachineName[0];
}
}
}
}
4. How do I know the number of machines connected of SkyMars?
You could use API as "SKY_conn_count", as following example code:
StructMsg.Pwd _Pwd = new StructMsg.Pwd();
_Pwd.ConnectionKey = "123";
StructMsg.total_count R = new StructMsg.total_count();

Precision Machinery Research Development Center - Intelligent technology department
12
short ret = iRemoting.SKY_conn_count(_Pwd, ref R);
if (ret == 0)
MessageBox.Show(R.Count.ToString());
else
MessageBox.Show(ret.ToString());
Precision Machinery Research Development Center - Intelligent technology department
13
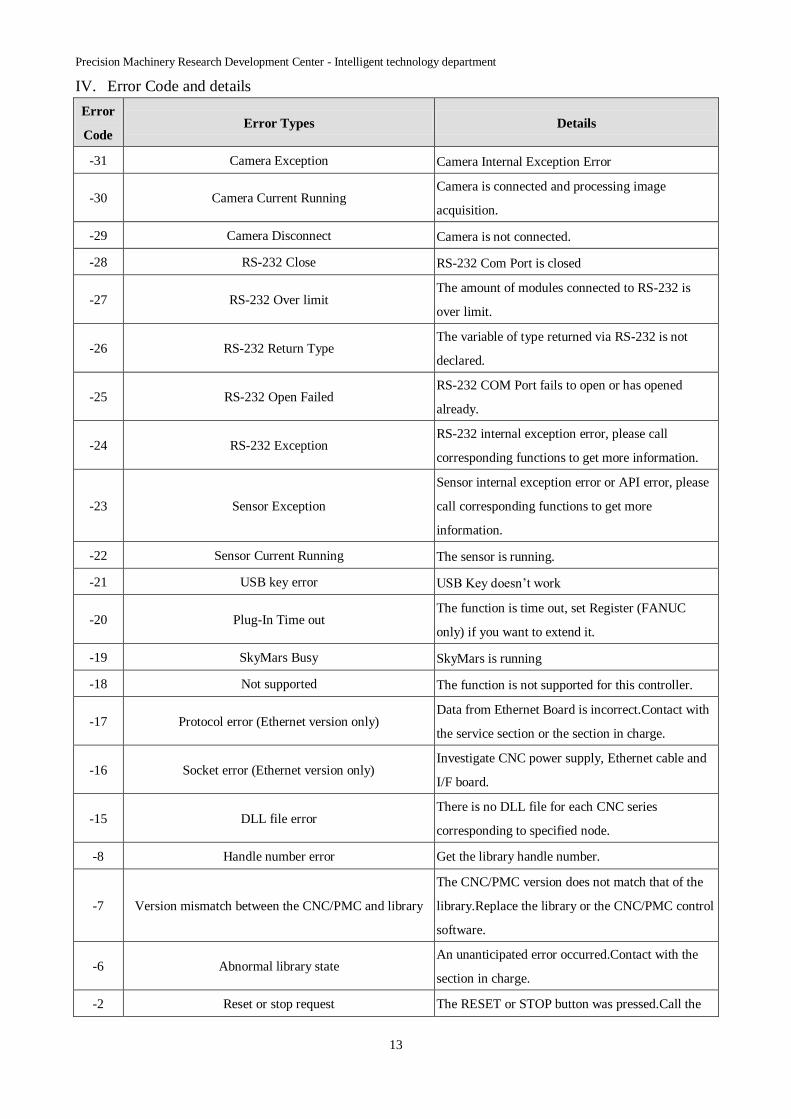
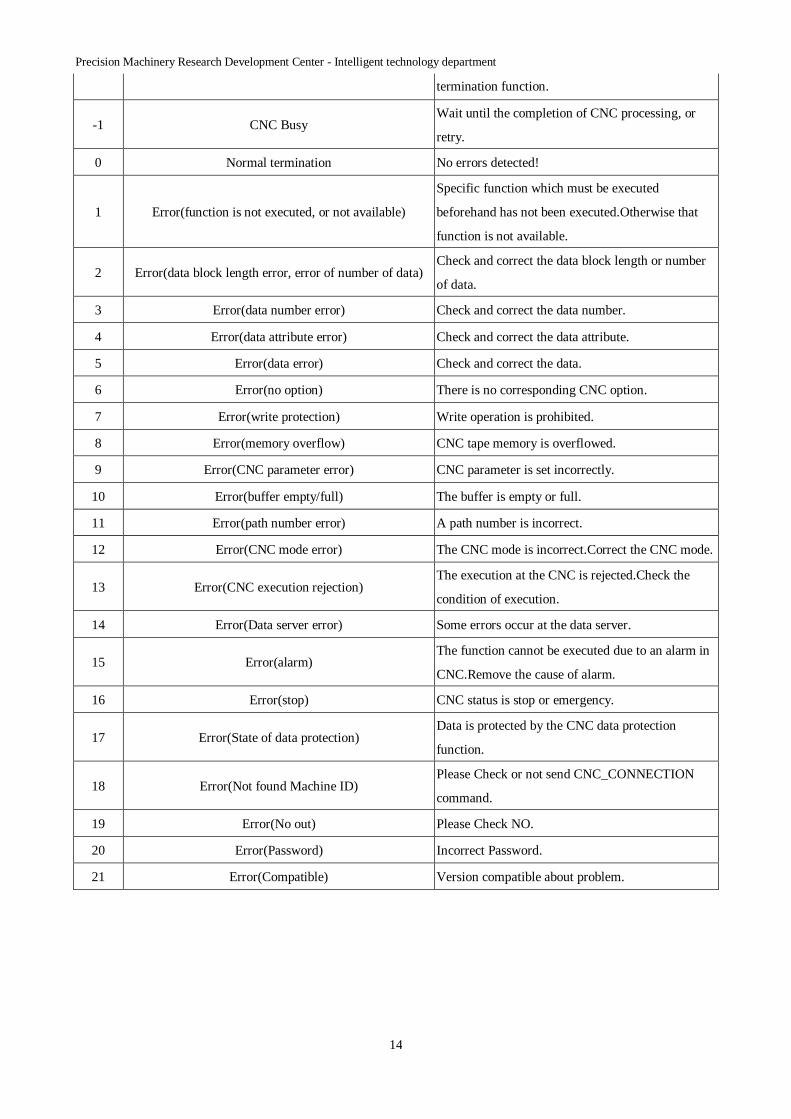
IV. Error Code and details
Error
Code Error Types Details
-31 Camera Exception Camera Internal Exception Error
-30 Camera Current Running Camera is connected and processing image
acquisition.
-29 Camera Disconnect Camera is not connected.
-28 RS-232 Close RS-232 Com Port is closed
-27 RS-232 Over limit The amount of modules connected to RS-232 is
over limit.
-26 RS-232 Return Type The variable of type returned via RS-232 is not
declared.
-25 RS-232 Open Failed RS-232 COM Port fails to open or has opened
already.
-24 RS-232 Exception RS-232 internal exception error, please call
corresponding functions to get more information.
-23 Sensor Exception
Sensor internal exception error or API error, please
call corresponding functions to get more
information.
-22 Sensor Current Running The sensor is running.
-21 USB key error USB Key doesn’t work
-20 Plug-In Time out The function is time out, set Register (FANUC
only) if you want to extend it.
-19 SkyMars Busy SkyMars is running
-18 Not supported The function is not supported for this controller.
-17 Protocol error (Ethernet version only) Data from Ethernet Board is incorrect.Contact with
the service section or the section in charge.
-16 Socket error (Ethernet version only) Investigate CNC power supply, Ethernet cable and
I/F board.
-15 DLL file error There is no DLL file for each CNC series
corresponding to specified node.
-8 Handle number error Get the library handle number.
-7 Version mismatch between the CNC/PMC and library
The CNC/PMC version does not match that of the
library.Replace the library or the CNC/PMC control
software.
-6 Abnormal library state An unanticipated error occurred.Contact with the
section in charge.
-2 Reset or stop request The RESET or STOP button was pressed.Call the
Precision Machinery Research Development Center - Intelligent technology department
14
termination function.
-1 CNC Busy Wait until the completion of CNC processing, or
retry.
0 Normal termination No errors detected!
1 Error(function is not executed, or not available)
Specific function which must be executed
beforehand has not been executed.Otherwise that
function is not available.
2 Error(data block length error, error of number of data) Check and correct the data block length or number
of data.
3 Error(data number error) Check and correct the data number.
4 Error(data attribute error) Check and correct the data attribute.
5 Error(data error) Check and correct the data.
6 Error(no option) There is no corresponding CNC option.
7 Error(write protection) Write operation is prohibited.
8 Error(memory overflow) CNC tape memory is overflowed.
9 Error(CNC parameter error) CNC parameter is set incorrectly.
10 Error(buffer empty/full) The buffer is empty or full.
11 Error(path number error) A path number is incorrect.
12 Error(CNC mode error) The CNC mode is incorrect.Correct the CNC mode.
13 Error(CNC execution rejection) The execution at the CNC is rejected.Check the
condition of execution.
14 Error(Data server error) Some errors occur at the data server.
15 Error(alarm) The function cannot be executed due to an alarm in
CNC.Remove the cause of alarm.
16 Error(stop) CNC status is stop or emergency.
17 Error(State of data protection) Data is protected by the CNC data protection
function.
18 Error(Not found Machine ID) Please Check or not send CNC_CONNECTION
command.
19 Error(No out) Please Check NO.
20 Error(Password) Incorrect Password.
21 Error(Compatible) Version compatible about problem.
Precision Machinery Research Development Center - Intelligent technology department
15
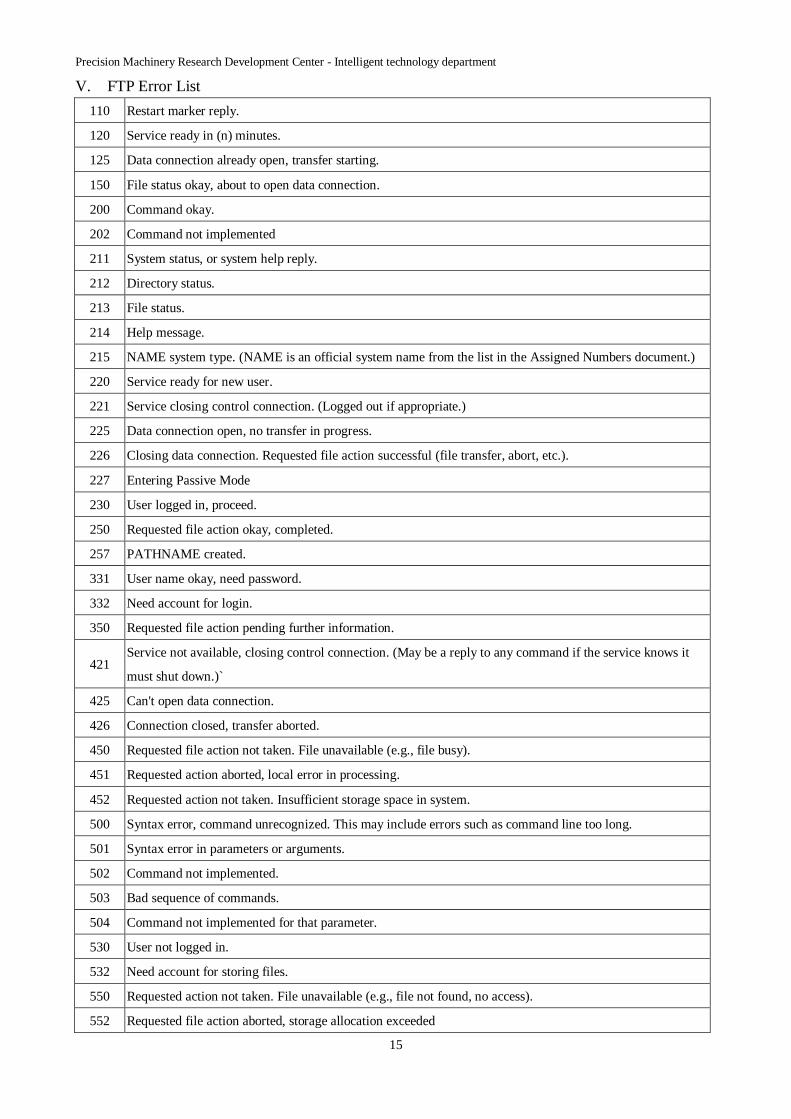
V. FTP Error List
110 Restart marker reply.
120 Service ready in (n) minutes.
125 Data connection already open, transfer starting.
150 File status okay, about to open data connection.
200 Command okay.
202 Command not implemented
211 System status, or system help reply.
212 Directory status.
213 File status.
214 Help message.
215 NAME system type. (NAME is an official system name from the list in the Assigned Numbers document.)
220 Service ready for new user.
221 Service closing control connection. (Logged out if appropriate.)
225 Data connection open, no transfer in progress.
226 Closing data connection. Requested file action successful (file transfer, abort, etc.).
227 Entering Passive Mode
230 User logged in, proceed.
250 Requested file action okay, completed.
257 PATHNAME created.
331 User name okay, need password.
332 Need account for login.
350 Requested file action pending further information.
421 Service not available, closing control connection. (May be a reply to any command if the service knows it
must shut down.)`
425 Can't open data connection.
426 Connection closed, transfer aborted.
450 Requested file action not taken. File unavailable (e.g., file busy).
451 Requested action aborted, local error in processing.
452 Requested action not taken. Insufficient storage space in system.
500 Syntax error, command unrecognized. This may include errors such as command line too long.
501 Syntax error in parameters or arguments.
502 Command not implemented.
503 Bad sequence of commands.
504 Command not implemented for that parameter.
530 User not logged in.
532 Need account for storing files.
550 Requested action not taken. File unavailable (e.g., file not found, no access).
552 Requested file action aborted, storage allocation exceeded

Precision Machinery Research Development Center - Intelligent technology department
16
553 Requested action not taken. Illegal file name.
Precision Machinery Research Development Center - Intelligent technology department
17
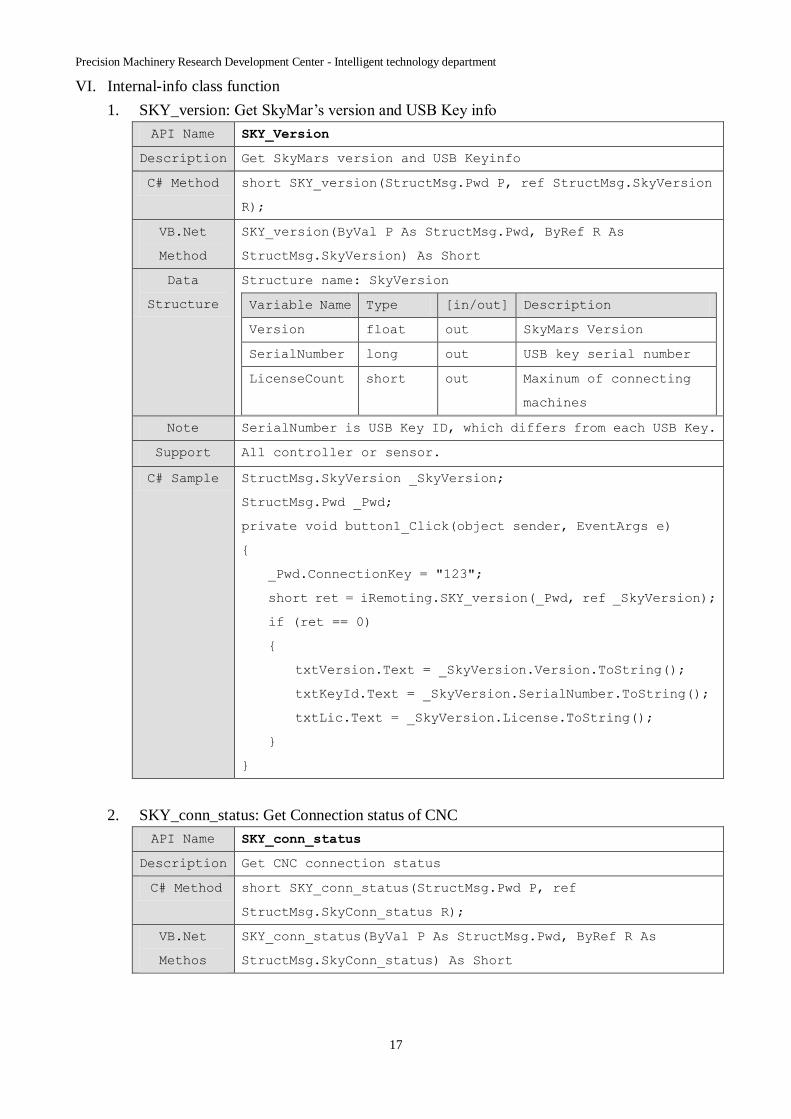
VI. Internal-info class function
1. SKY_version: Get SkyMar’s version and USB Key info
API Name SKY_Version
Description Get SkyMars version and USB Keyinfo
C# Method short SKY_version(StructMsg.Pwd P, ref StructMsg.SkyVersion
R);
VB.Net
Method
SKY_version(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.SkyVersion) As Short
Data
Structure
Structure name: SkyVersion
Variable Name Type [in/out] Description
Version float out SkyMars Version
SerialNumber long out USB key serial number
LicenseCount short out Maxinum of connecting
machines
Note SerialNumber is USB Key ID, which differs from each USB Key.
Support All controller or sensor.
C# Sample StructMsg.SkyVersion _SkyVersion;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SKY_version(_Pwd, ref _SkyVersion);
if (ret == 0)
{
txtVersion.Text = _SkyVersion.Version.ToString();
txtKeyId.Text = _SkyVersion.SerialNumber.ToString();
txtLic.Text = _SkyVersion.License.ToString();
}
}
2. SKY_conn_status: Get Connection status of CNC
API Name SKY_conn_status
Description Get CNC connection status
C# Method short SKY_conn_status(StructMsg.Pwd P, ref
StructMsg.SkyConn_status R);
VB.Net
Methos
SKY_conn_status(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.SkyConn_status) As Short

Precision Machinery Research Development Center - Intelligent technology department
18
Data
Structure
Structure Name: SkyConn_status
Pamarametr
Name
Type [in/out] Info
MachineNo int[] out Machine Index
Status short[] out 0:Off 1:RUN 2:IDLE
3:Alarm
4:RUN and Alarm
Note
Support All controller or sensor.
C# Sample StructMsg.SkyConn_status _SkyConn_status;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SKY_conn_status(_Pwd, ref
_SkyConn_status);
if (ret == 0)
{
txtMachineNo.Text =
_SkyConn_status.MachineNo[0].ToString();
txtStatus.Text =
_SkyConn_status.Status[0].ToString();
}
}
3. SKY_conn_ip_port: Get CNC IP, port and other corelation info
API Name SKY_conn_ip_port
Description Get CNC IP, port, and other correlation info
C# Method short SKY_conn_ip_port(StructMsg.Pwd P, ref
StructMsg.SkyConn_ip_port R);
VB.Net
Method
SKY_conn_ip_port(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.SkyConn_ip_port) As Short
Data
Structure
Structure Name: SkyConn_ip_port
Variable Name Type [in/out] Description
MachineNo int[] out Machine Index
MachineName string[] out Machine Name
IP string[] out Machine IP
Port short[] out Machine Port
Manufacturer string[] out Brand
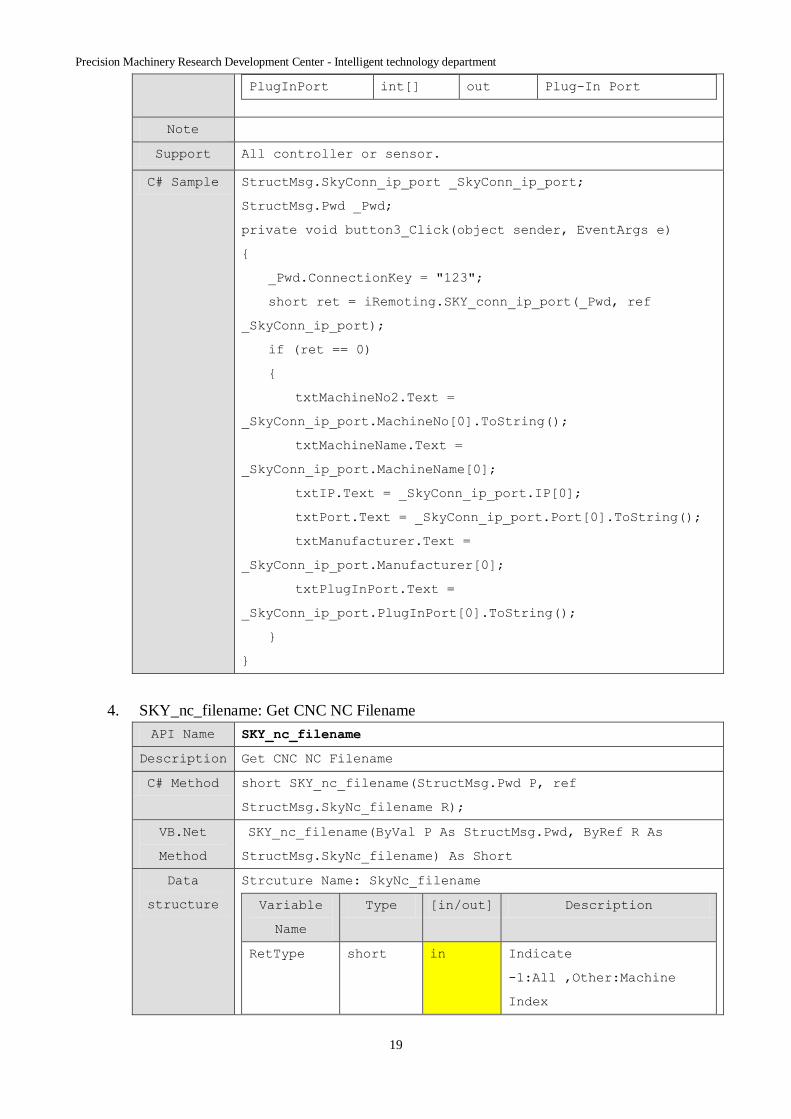
Precision Machinery Research Development Center - Intelligent technology department
19
PlugInPort int[] out Plug-In Port
Note
Support All controller or sensor.
C# Sample StructMsg.SkyConn_ip_port _SkyConn_ip_port;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SKY_conn_ip_port(_Pwd, ref
_SkyConn_ip_port);
if (ret == 0)
{
txtMachineNo2.Text =
_SkyConn_ip_port.MachineNo[0].ToString();
txtMachineName.Text =
_SkyConn_ip_port.MachineName[0];
txtIP.Text = _SkyConn_ip_port.IP[0];
txtPort.Text = _SkyConn_ip_port.Port[0].ToString();
txtManufacturer.Text =
_SkyConn_ip_port.Manufacturer[0];
txtPlugInPort.Text =
_SkyConn_ip_port.PlugInPort[0].ToString();
}
}
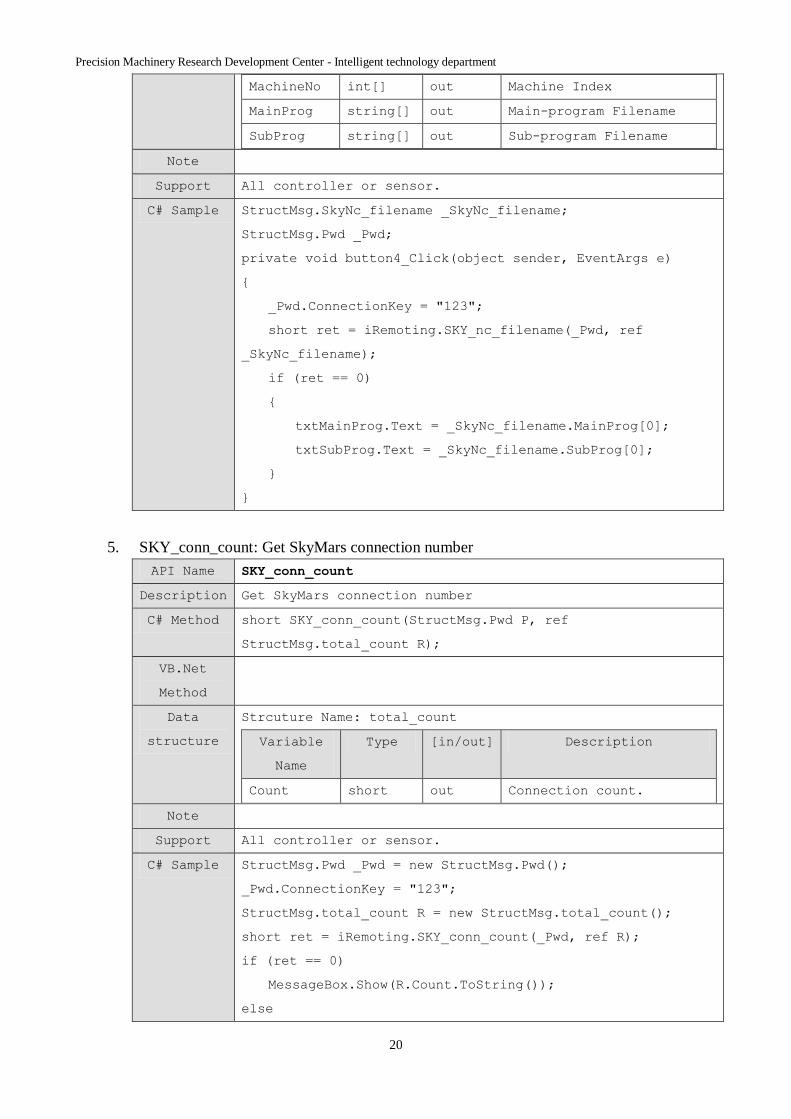
4. SKY_nc_filename: Get CNC NC Filename
API Name SKY_nc_filename
Description Get CNC NC Filename
C# Method short SKY_nc_filename(StructMsg.Pwd P, ref
StructMsg.SkyNc_filename R);
VB.Net
Method
SKY_nc_filename(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.SkyNc_filename) As Short
Data
structure
Strcuture Name: SkyNc_filename
Variable
Name
Type [in/out] Description
RetType short in Indicate
-1:All ,Other:Machine
Index
Precision Machinery Research Development Center - Intelligent technology department
20
MachineNo int[] out Machine Index
MainProg string[] out Main-program Filename
SubProg string[] out Sub-program Filename
Note
Support All controller or sensor.
C# Sample StructMsg.SkyNc_filename _SkyNc_filename;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SKY_nc_filename(_Pwd, ref
_SkyNc_filename);
if (ret == 0)
{
txtMainProg.Text = _SkyNc_filename.MainProg[0];
txtSubProg.Text = _SkyNc_filename.SubProg[0];
}
}
5. SKY_conn_count: Get SkyMars connection number
API Name SKY_conn_count
Description Get SkyMars connection number
C# Method short SKY_conn_count(StructMsg.Pwd P, ref
StructMsg.total_count R);
VB.Net
Method
Data
structure
Strcuture Name: total_count
Variable
Name
Type [in/out] Description
Count short out Connection count.
Note
Support All controller or sensor.
C# Sample StructMsg.Pwd _Pwd = new StructMsg.Pwd();
_Pwd.ConnectionKey = "123";
StructMsg.total_count R = new StructMsg.total_count();
short ret = iRemoting.SKY_conn_count(_Pwd, ref R);
if (ret == 0)
MessageBox.Show(R.Count.ToString());
else

Precision Machinery Research Development Center - Intelligent technology department
21
MessageBox.Show(ret.ToString());
Precision Machinery Research Development Center - Intelligent technology department
22
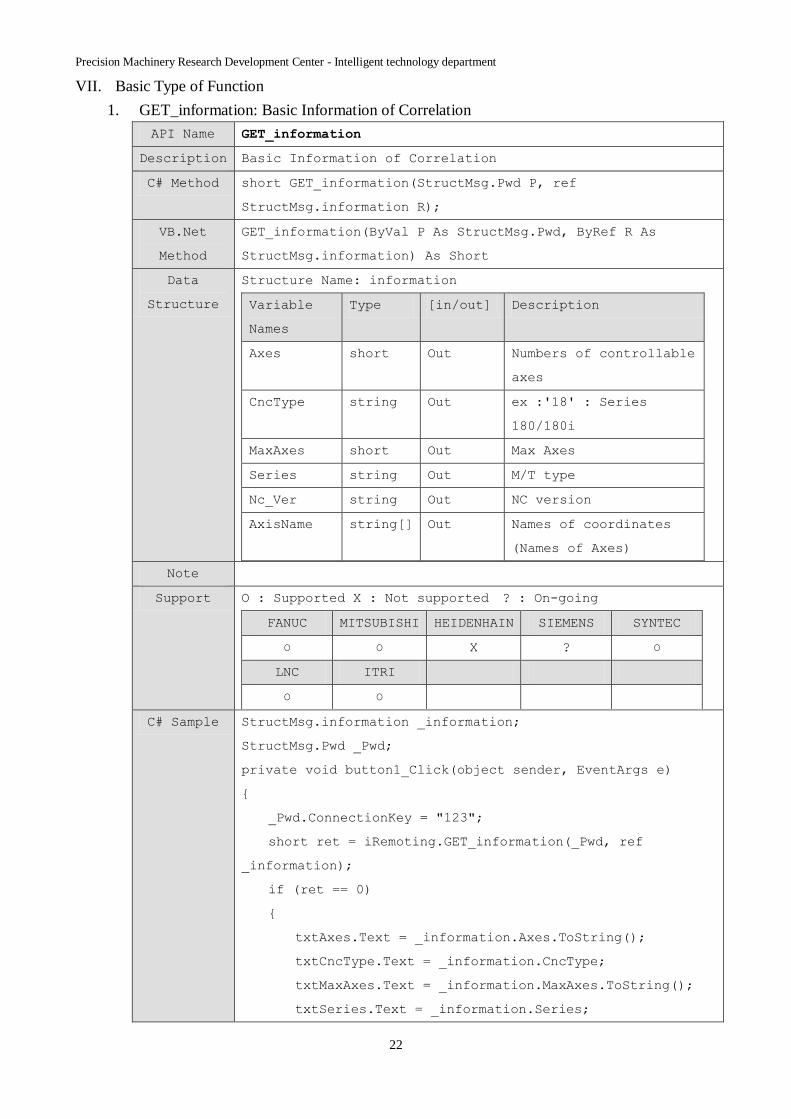
VII. Basic Type of Function
1. GET_information: Basic Information of Correlation
API Name GET_information
Description Basic Information of Correlation
C# Method short GET_information(StructMsg.Pwd P, ref
StructMsg.information R);
VB.Net
Method
GET_information(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.information) As Short
Data
Structure
Structure Name: information
Variable
Names
Type [in/out] Description
Axes short Out Numbers of controllable
axes
CncType string Out ex :'18' : Series
180/180i
MaxAxes short Out Max Axes
Series string Out M/T type
Nc_Ver string Out NC version
AxisName string[] Out Names of coordinates
(Names of Axes)
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.information _information;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_information(_Pwd, ref
_information);
if (ret == 0)
{
txtAxes.Text = _information.Axes.ToString();
txtCncType.Text = _information.CncType;
txtMaxAxes.Text = _information.MaxAxes.ToString();
txtSeries.Text = _information.Series;

Precision Machinery Research Development Center - Intelligent technology department
23
txtNc_Ver.Text = _information.Nc_Ver;
}
}
2. GET_information_heid: Basic information of HEIDENHAIN controller
API Name GET_information_heid
Description Basic information of correlation
C# Method short GET_information_heid(StructMsg.Pwd P, ref
StructMsg.information_heid R);
VB.Net
Method
GET_information_heid(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.information_heid) As Short
Data
structure
Structure name: information_heid
Variable
Names
Type [in/out] Description
Axes short Out Numbers of controllable
axes
Model string Out
Nc_Ver string Out
FCL string Out
Plc_Ver string Out
AxisName string[] Out Names of coordinates
(Names of Axes)
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O X X
LNC ITRI
X X
C# Sample
StructMsg.information_heid _information_heid;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_information_heid(ref
_information_heid);
if (ret == 0)
{
txtAxes.Text = _information_heid.Axes.ToString();
txtModel.Text = _information_heid.Model;
txtNc_Ver.Text = _information_heid.Nc_Ver;
txtFCL.Text = _information_heid.FCL;
Precision Machinery Research Development Center - Intelligent technology department
24
txtPlc_Ver.Text = _information_heid.Plc_Ver;
txtAxisName.Text = _information_heid.AxisName[0];
}
}
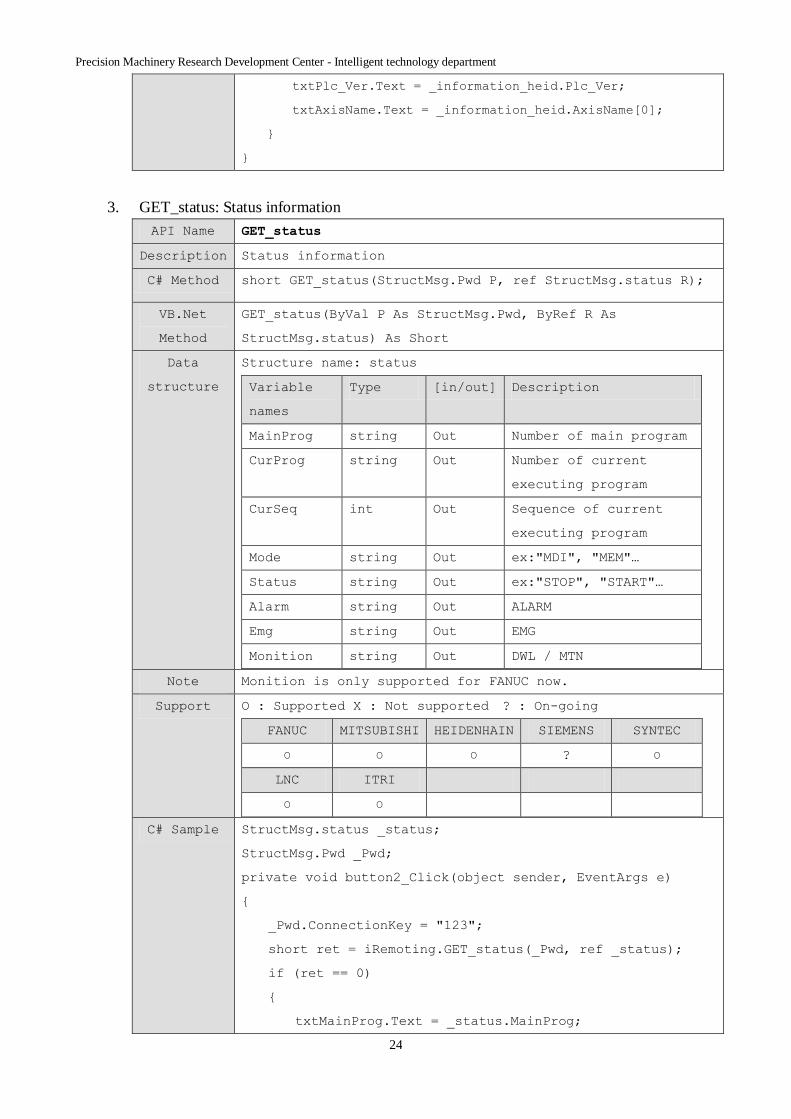
3. GET_status: Status information
API Name GET_status
Description Status information
C# Method short GET_status(StructMsg.Pwd P, ref StructMsg.status R);
VB.Net
Method
GET_status(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.status) As Short
Data
structure
Structure name: status
Variable
names
Type [in/out] Description
MainProg string Out Number of main program
CurProg string Out Number of current
executing program
CurSeq int Out Sequence of current
executing program
Mode string Out ex:"MDI", "MEM"…
Status string Out ex:"STOP", "START"…
Alarm string Out ALARM
Emg string Out EMG
Monition string Out DWL / MTN
Note Monition is only supported for FANUC now.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.status _status;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_status(_Pwd, ref _status);
if (ret == 0)
{
txtMainProg.Text = _status.MainProg;

Precision Machinery Research Development Center - Intelligent technology department
25
txtCurProg.Text = _status.CurProg;
txtCurSeq.Text = _status.CurSeq.ToString();
txtMode.Text = _status.Mode;
txtStatus.Text = _status.Status;
txtAlarm.Text = _status.Alarm;
txtEMG.Text = _status.Emg;
}
}
4. GET_position: Coordinate Status
API Name GET_position
Description Coordinate Status
C# Method short GET_position(StructMsg.Pwd P, ref StructMsg.position R);
VB.Net
Method
GET_position(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.position) As Short
Data
Structure
Structure name: position
Variable
Names
Type [in/out] Description
AxisName string[] out Names of Axes
DecPoint sohrt out Floating point number of
Axes
Unit string[] out Unit of coordinates
Mach double[] out Mechanical coordinate
system
Abs double[] out Absolute coordinate
system
Rel double[] out Relative coordinate
system
Dist double[] out Remaining distance
Note ※ HEIDENHAIN controller doesn’t support relative coordinates.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O O O
LNC ITRI
O O
C# Sample StructMsg.position _position;
StructMsg.Pwd _Pwd;
private void button11_Click(object sender, EventArgs e)
{

Precision Machinery Research Development Center - Intelligent technology department
26
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_position(_Pwd, ref _position);
if (ret == 0)
{
txtAbs.Text = _position.Abs[0].ToString();
txtMach.Text = _position.Mach[0].ToString();
txtRel.Text = _position.Rel[0].ToString();
txtDist.Text = _position.Dist[0].ToString();
}
}
5. GET_gcode: G Code
API Name GET_gcode
Description G Code
C# Method short GET_gcode(StructMsg.Pwd P, ref StructMsg.gcode R);
VB.Net
Method
GET_gcode(ByVal P As StructMsg.Pwd, ByRef R As StructMsg.gcode)
As Short
Data
Structure
Structure name: gcode
Variable
names
Type [in/out] Description
Gdata string[] out G Code
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.gcode _gcode;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_gcode(_Pwd, ref _gcode);
if (ret == 0)
{
for (int i = 0; i <= _gcode.Gdata.Length - 1; i++)
{
txtGCode.Text += _gcode.Gdata[i] + " ";
}
Precision Machinery Research Development Center - Intelligent technology department
27
}
}
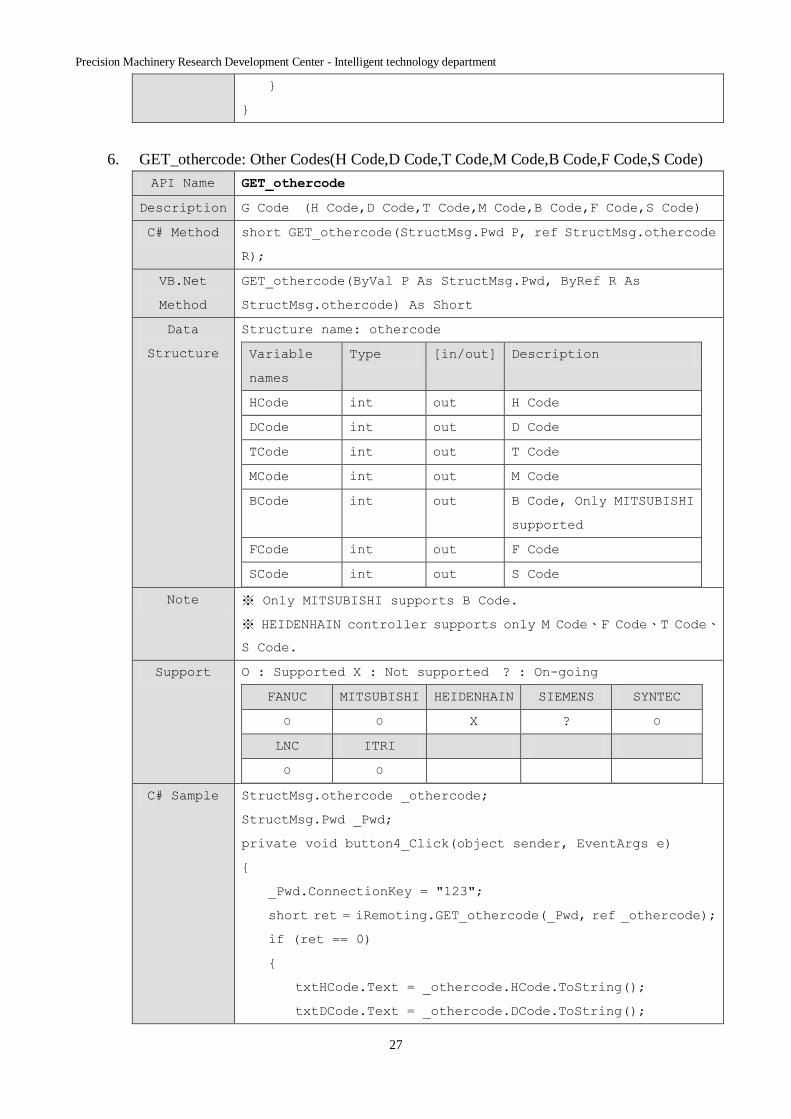
6. GET_othercode: Other Codes(H Code,D Code,T Code,M Code,B Code,F Code,S Code)
API Name GET_othercode
Description G Code (H Code,D Code,T Code,M Code,B Code,F Code,S Code)
C# Method short GET_othercode(StructMsg.Pwd P, ref StructMsg.othercode
R);
VB.Net
Method
GET_othercode(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.othercode) As Short
Data
Structure
Structure name: othercode
Variable
names
Type [in/out] Description
HCode int out H Code
DCode int out D Code
TCode int out T Code
MCode int out M Code
BCode int out B Code, Only MITSUBISHI
supported
FCode int out F Code
SCode int out S Code
Note ※ Only MITSUBISHI supports B Code.
※ HEIDENHAIN controller supports only M Code、F Code、T Code、
S Code.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.othercode _othercode;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_othercode(_Pwd, ref _othercode);
if (ret == 0)
{
txtHCode.Text = _othercode.HCode.ToString();
txtDCode.Text = _othercode.DCode.ToString();
Precision Machinery Research Development Center - Intelligent technology department
28
txtTCode.Text = _othercode.TCode.ToString();
txtMCode.Text = _othercode.MCode.ToString();
txtBCode.Text = _othercode.BCode.ToString();
txtFCode.Text = _othercode.FCode.ToString();
txtSCode.Text = _othercode.SCode.ToString();
}
}
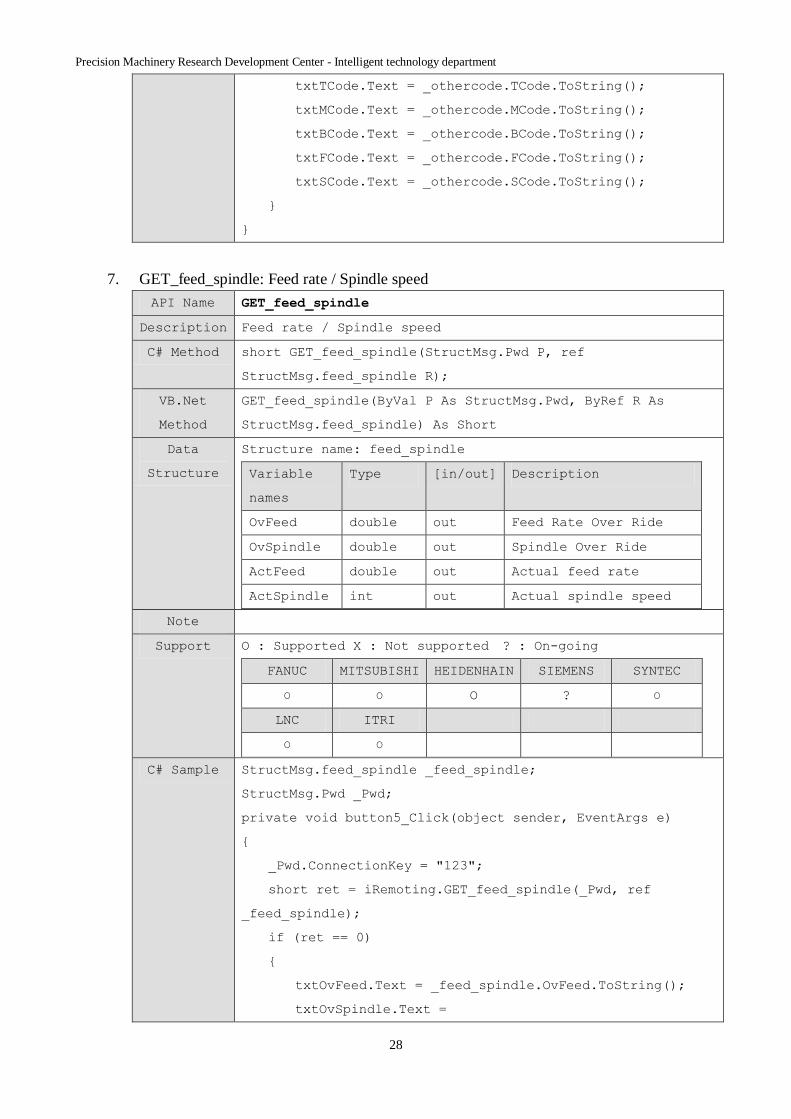
7. GET_feed_spindle: Feed rate / Spindle speed
API Name GET_feed_spindle
Description Feed rate / Spindle speed
C# Method short GET_feed_spindle(StructMsg.Pwd P, ref
StructMsg.feed_spindle R);
VB.Net
Method
GET_feed_spindle(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.feed_spindle) As Short
Data
Structure
Structure name: feed_spindle
Variable
names
Type [in/out] Description
OvFeed double out Feed Rate Over Ride
OvSpindle double out Spindle Over Ride
ActFeed double out Actual feed rate
ActSpindle int out Actual spindle speed
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.feed_spindle _feed_spindle;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_feed_spindle(_Pwd, ref
_feed_spindle);
if (ret == 0)
{
txtOvFeed.Text = _feed_spindle.OvFeed.ToString();
txtOvSpindle.Text =
Precision Machinery Research Development Center - Intelligent technology department
29
_feed_spindle.OvSpindle.ToString();
txtActFeed.Text = _feed_spindle.ActFeed.ToString();
txtActSpindle.Text =
_feed_spindle.ActSpindle.ToString();
}
}
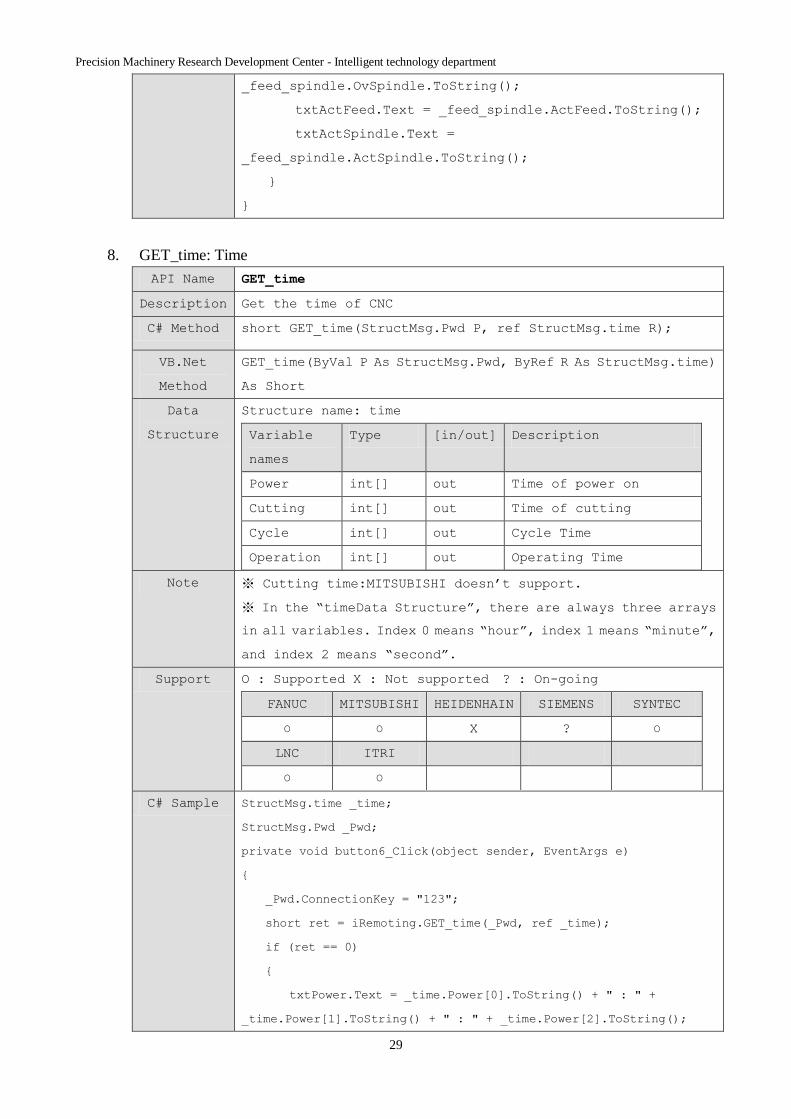
8. GET_time: Time
API Name GET_time
Description Get the time of CNC
C# Method short GET_time(StructMsg.Pwd P, ref StructMsg.time R);
VB.Net
Method
GET_time(ByVal P As StructMsg.Pwd, ByRef R As StructMsg.time)
As Short
Data
Structure
Structure name: time
Variable
names
Type [in/out] Description
Power int[] out Time of power on
Cutting int[] out Time of cutting
Cycle int[] out Cycle Time
Operation int[] out Operating Time
Note ※ Cutting time:MITSUBISHI doesn’t support.
※ In the “timeData Structure”, there are always three arrays
in all variables. Index 0 means “hour”, index 1 means “minute”,
and index 2 means “second”.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.time _time;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_time(_Pwd, ref _time);
if (ret == 0)
{
txtPower.Text = _time.Power[0].ToString() + " : " +
_time.Power[1].ToString() + " : " + _time.Power[2].ToString();
Precision Machinery Research Development Center - Intelligent technology department
30
txtCutting.Text = _time.Cutting[0].ToString() + " : " +
_time.Cutting[1].ToString() + " : " + _time.Cutting[2].ToString();
txtCycle.Text = _time.Cycle[0].ToString() + " : " +
_time.Cycle[1].ToString() + " : " + _time.Cycle[2].ToString();
txtOperation.Text = _time.Operation[0].ToString() + " : " +
_time.Operation[1].ToString() + " : " +
_time.Operation[2].ToString();
}
}
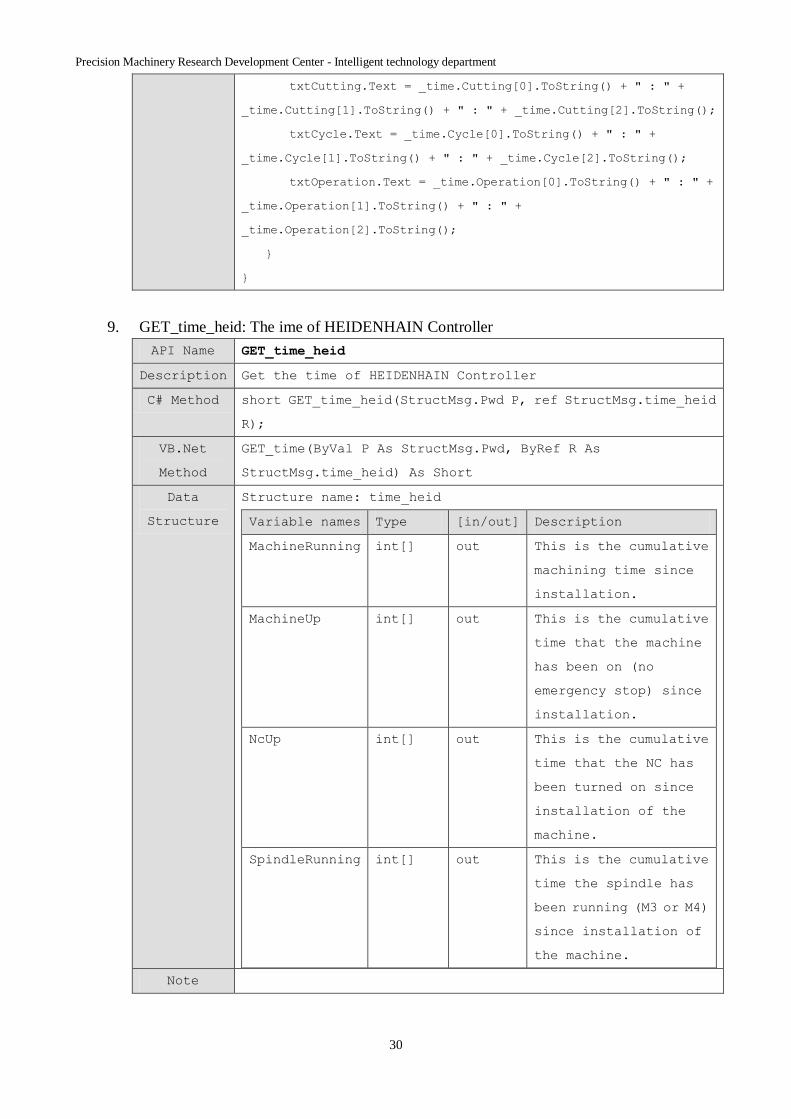
9. GET_time_heid: The ime of HEIDENHAIN Controller
API Name GET_time_heid
Description Get the time of HEIDENHAIN Controller
C# Method short GET_time_heid(StructMsg.Pwd P, ref StructMsg.time_heid
R);
VB.Net
Method
GET_time(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.time_heid) As Short
Data
Structure
Structure name: time_heid
Variable names Type [in/out] Description
MachineRunning int[] out This is the cumulative
machining time since
installation.
MachineUp int[] out This is the cumulative
time that the machine
has been on (no
emergency stop) since
installation.
NcUp int[] out This is the cumulative
time that the NC has
been turned on since
installation of the
machine.
SpindleRunning int[] out This is the cumulative
time the spindle has
been running (M3 or M4)
since installation of
the machine.
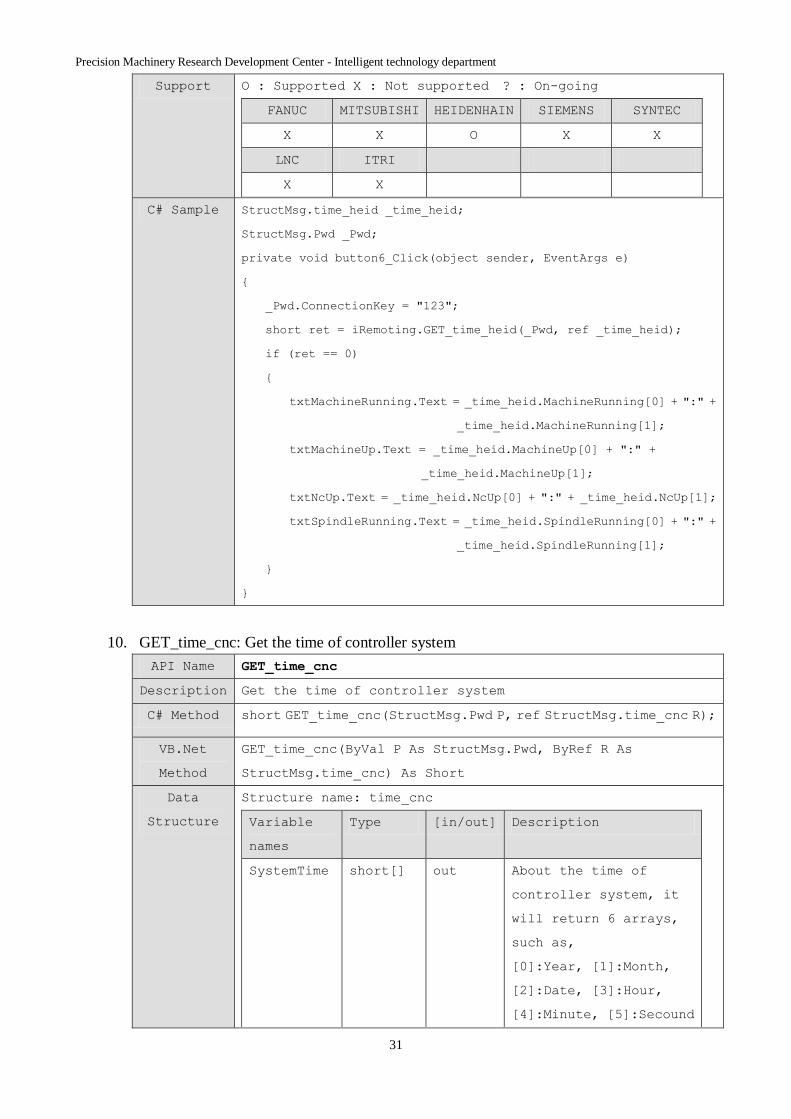
Note
Precision Machinery Research Development Center - Intelligent technology department
31
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O X X
LNC ITRI
X X
C# Sample StructMsg.time_heid _time_heid;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_time_heid(_Pwd, ref _time_heid);
if (ret == 0)
{
txtMachineRunning.Text = _time_heid.MachineRunning[0] + ":" +
_time_heid.MachineRunning[1];
txtMachineUp.Text = _time_heid.MachineUp[0] + ":" +
_time_heid.MachineUp[1];
txtNcUp.Text = _time_heid.NcUp[0] + ":" + _time_heid.NcUp[1];
txtSpindleRunning.Text = _time_heid.SpindleRunning[0] + ":" +
_time_heid.SpindleRunning[1];
}
}
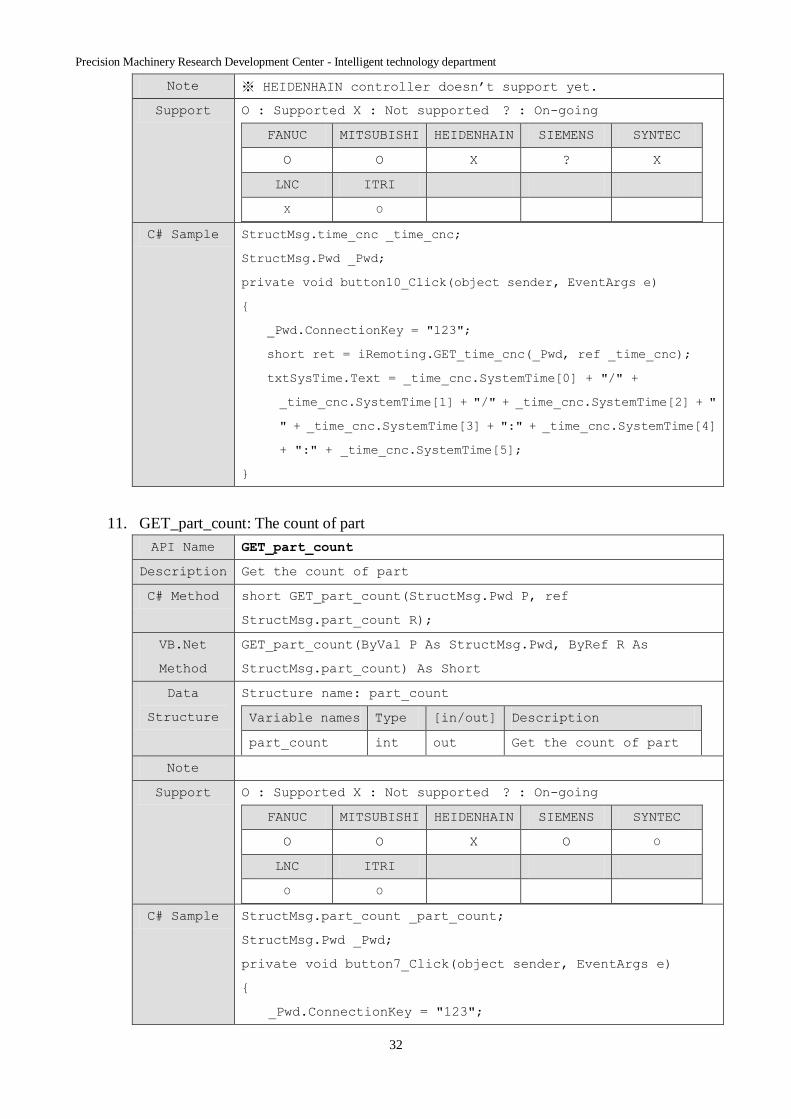
10. GET_time_cnc: Get the time of controller system
API Name GET_time_cnc
Description Get the time of controller system
C# Method short GET_time_cnc(StructMsg.Pwd P, ref StructMsg.time_cnc R);
VB.Net
Method
GET_time_cnc(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.time_cnc) As Short
Data
Structure
Structure name: time_cnc
Variable
names
Type [in/out] Description
SystemTime short[] out About the time of
controller system, it
will return 6 arrays,
such as,
[0]:Year, [1]:Month,
[2]:Date, [3]:Hour,
[4]:Minute, [5]:Secound
Precision Machinery Research Development Center - Intelligent technology department
32
Note ※ HEIDENHAIN controller doesn’t support yet.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? X
LNC ITRI
X O
C# Sample StructMsg.time_cnc _time_cnc;
StructMsg.Pwd _Pwd;
private void button10_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_time_cnc(_Pwd, ref _time_cnc);
txtSysTime.Text = _time_cnc.SystemTime[0] + "/" +
_time_cnc.SystemTime[1] + "/" + _time_cnc.SystemTime[2] + "
" + _time_cnc.SystemTime[3] + ":" + _time_cnc.SystemTime[4]
+ ":" + _time_cnc.SystemTime[5];
}
11. GET_part_count: The count of part
API Name GET_part_count
Description Get the count of part
C# Method short GET_part_count(StructMsg.Pwd P, ref
StructMsg.part_count R);
VB.Net
Method
GET_part_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.part_count) As Short
Data
Structure
Structure name: part_count
Variable names Type [in/out] Description
part_count int out Get the count of part
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X O O
LNC ITRI
O O
C# Sample StructMsg.part_count _part_count;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";

Precision Machinery Research Development Center - Intelligent technology department
33
short ret = iRemoting.GET_part_count(_Pwd, ref
_part_count);
if (ret == 0)
{
txtPartCount.Text = _part_count.PartCount.ToString();
}
}
12. GET_part_total:
API Name GET_part_total
Description
C# Method short GET_part_total(StructMsg.Pwd P, ref
StructMsg.part_total R);
VB.Net
Method
GET_part_total(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.part_total) As Short
Data
Structure
Structure name: part_total
Variable
names
Type [in/out] Description
PartTotal int Out
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X X O
LNC ITRI
X X
C# Sample StructMsg.part_total _part_total;
StructMsg.Pwd _Pwd;
private void button8_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_part_total(_Pwd, ref
_part_total);
if (ret == 0)
{
txtPartTotal.Text = _part_total.PartTotal.ToString();
}
}
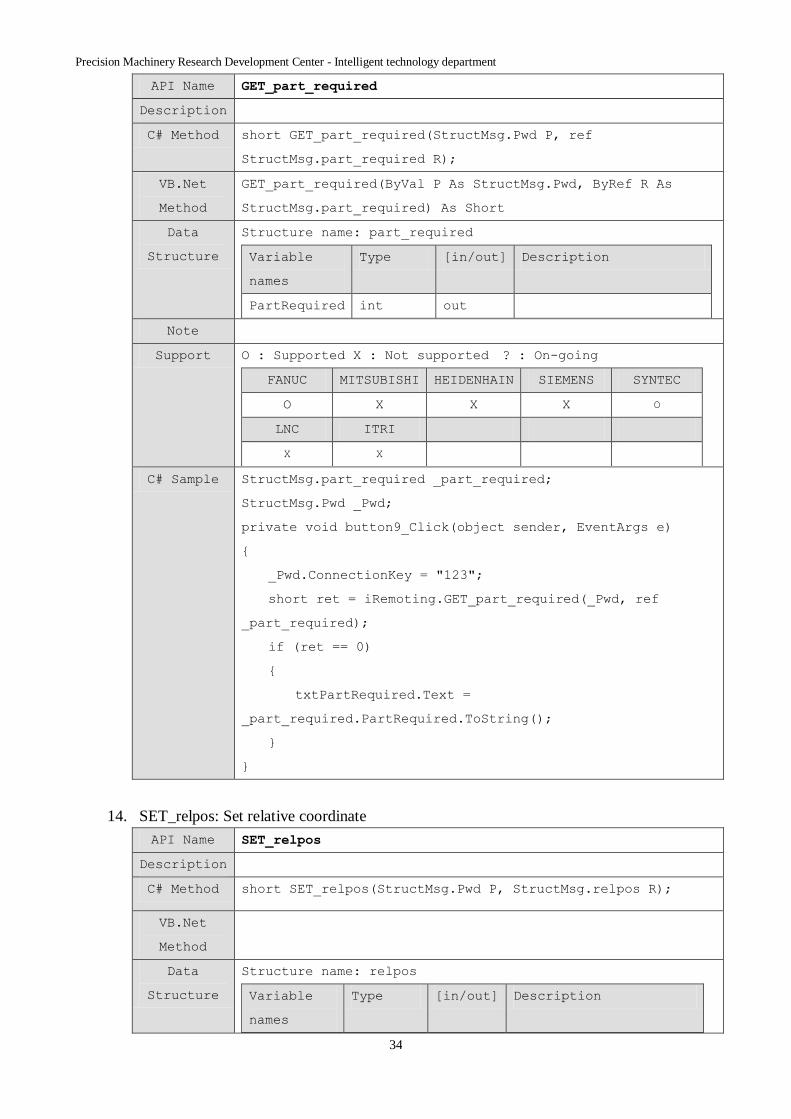
13. GET_part_required:
Precision Machinery Research Development Center - Intelligent technology department
34
API Name GET_part_required
Description
C# Method short GET_part_required(StructMsg.Pwd P, ref
StructMsg.part_required R);
VB.Net
Method
GET_part_required(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.part_required) As Short
Data
Structure
Structure name: part_required
Variable
names
Type [in/out] Description
PartRequired int out
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X X O
LNC ITRI
X X
C# Sample StructMsg.part_required _part_required;
StructMsg.Pwd _Pwd;
private void button9_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_part_required(_Pwd, ref
_part_required);
if (ret == 0)
{
txtPartRequired.Text =
_part_required.PartRequired.ToString();
}
}
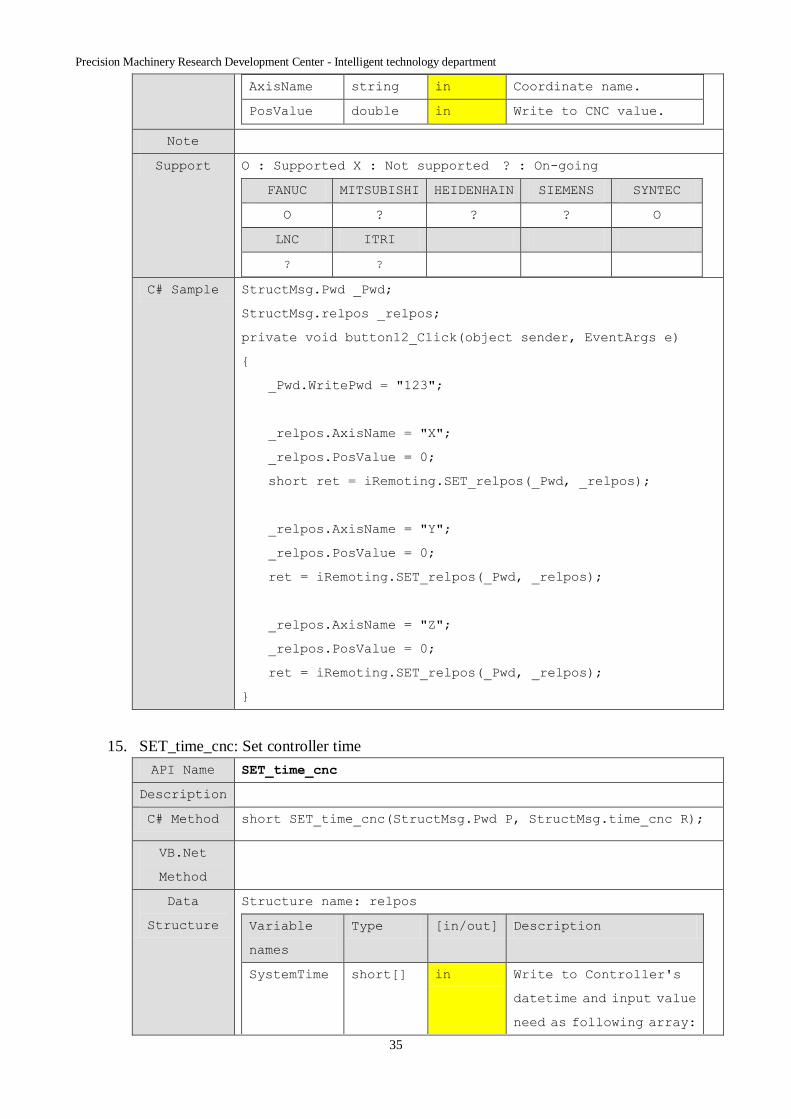
14. SET_relpos: Set relative coordinate
API Name SET_relpos
Description
C# Method short SET_relpos(StructMsg.Pwd P, StructMsg.relpos R);
VB.Net
Method
Data
Structure
Structure name: relpos
Variable
names
Type [in/out] Description
Precision Machinery Research Development Center - Intelligent technology department
35
AxisName string in Coordinate name.
PosValue double in Write to CNC value.
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
LNC ITRI
? ?
C# Sample StructMsg.Pwd _Pwd;
StructMsg.relpos _relpos;
private void button12_Click(object sender, EventArgs e)
{
_Pwd.WritePwd = "123";
_relpos.AxisName = "X";
_relpos.PosValue = 0;
short ret = iRemoting.SET_relpos(_Pwd, _relpos);
_relpos.AxisName = "Y";
_relpos.PosValue = 0;
ret = iRemoting.SET_relpos(_Pwd, _relpos);
_relpos.AxisName = "Z";
_relpos.PosValue = 0;
ret = iRemoting.SET_relpos(_Pwd, _relpos);
}
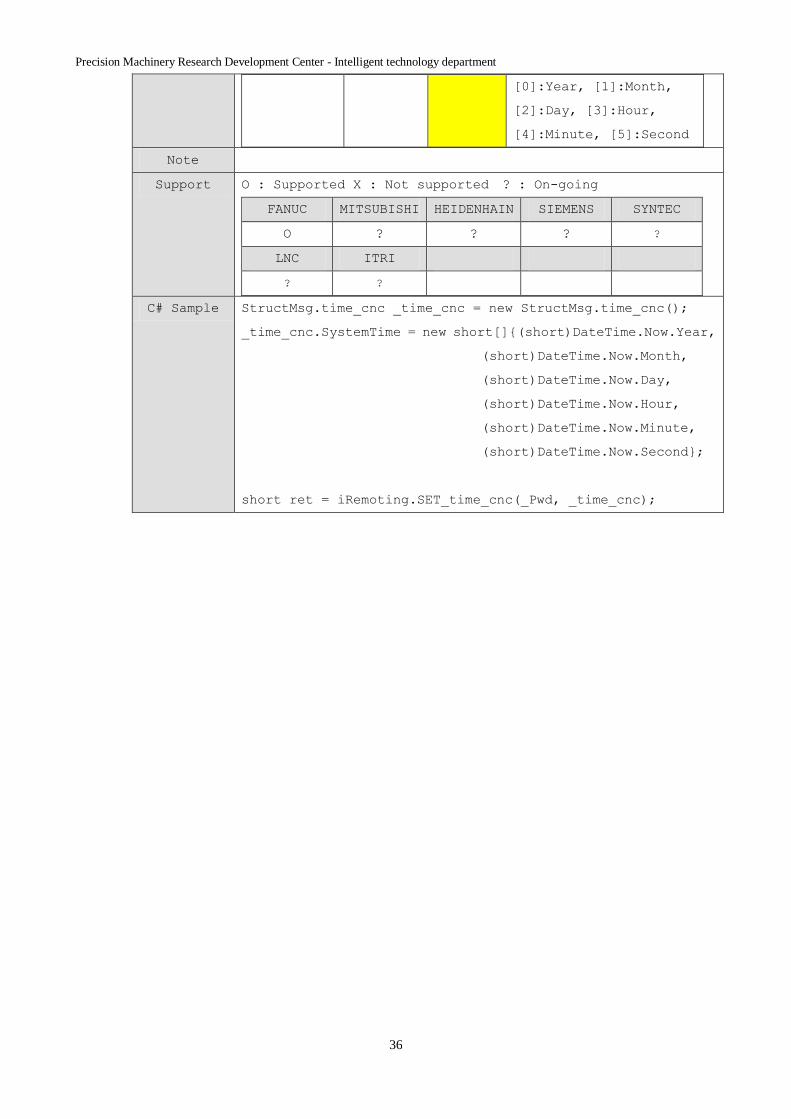
15. SET_time_cnc: Set controller time
API Name SET_time_cnc
Description
C# Method short SET_time_cnc(StructMsg.Pwd P, StructMsg.time_cnc R);
VB.Net
Method
Data
Structure
Structure name: relpos
Variable
names
Type [in/out] Description
SystemTime short[] in Write to Controller's
datetime and input value
need as following array:
Precision Machinery Research Development Center - Intelligent technology department
36
[0]:Year, [1]:Month,
[2]:Day, [3]:Hour,
[4]:Minute, [5]:Second
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? ?
LNC ITRI
? ?
C# Sample StructMsg.time_cnc _time_cnc = new StructMsg.time_cnc();
_time_cnc.SystemTime = new short[]{(short)DateTime.Now.Year,
(short)DateTime.Now.Month,
(short)DateTime.Now.Day,
(short)DateTime.Now.Hour,
(short)DateTime.Now.Minute,
(short)DateTime.Now.Second};
short ret = iRemoting.SET_time_cnc(_Pwd, _time_cnc);
Precision Machinery Research Development Center - Intelligent technology department
37
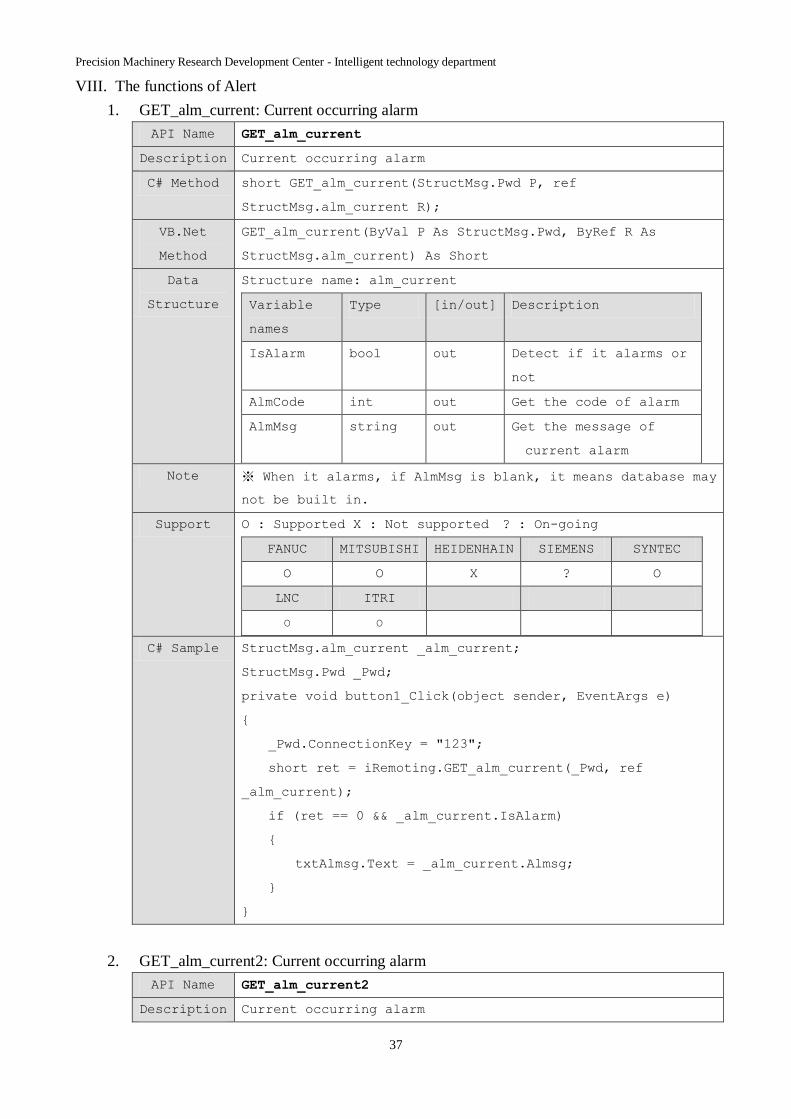
VIII. The functions of Alert
1. GET_alm_current: Current occurring alarm
API Name GET_alm_current
Description Current occurring alarm
C# Method short GET_alm_current(StructMsg.Pwd P, ref
StructMsg.alm_current R);
VB.Net
Method
GET_alm_current(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_current) As Short
Data
Structure
Structure name: alm_current
Variable
names
Type [in/out] Description
IsAlarm bool out Detect if it alarms or
not
AlmCode int out Get the code of alarm
AlmMsg string out Get the message of
current alarm
Note ※ When it alarms, if AlmMsg is blank, it means database may
not be built in.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.alm_current _alm_current;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_current(_Pwd, ref
_alm_current);
if (ret == 0 && _alm_current.IsAlarm)
{
txtAlmsg.Text = _alm_current.Almsg;
}
}
2. GET_alm_current2: Current occurring alarm
API Name GET_alm_current2
Description Current occurring alarm

Precision Machinery Research Development Center - Intelligent technology department
38
C# Method short GET_alm_current2(StructMsg.Pwd P, ref
StructMsg.alm_current2 R);
VB.Net
Method
GET_alm_current2(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_current2) As Short
Data
Structure
Structure name: alm_current2
Variable
names
Type [in/out] Description
IsAlarm bool out Detect if it alarms or
not
AlmClass string[] out Get the class of alarm.
AlmCode string[] out Get the code of alarm
AlmMsg string[] out Get the message of
current alarm
Note ※ The "AlmClass" variable apply in: HEIDENHAIN and SYNTEC
controller.
When "SkyMars Maintenance Management" or "SkyMars Tool
Management" have alarm, then the class name will write to
"AlmClass" variable:
The "SkyMars Maintenance Management" have class name is
"SkyMarsMaintenance".
The "SkyMars Tool Management" have class name is
"SkyMarsToolManagement".
※ The "AlmCode" variable apply in: FANUC, HEIDENHAIN and SYNTEC
controller.
※ The "AlmMsg" variable apply in: FANUC, HEIDENHAIN, SYNTEC,
SkyMars Maintenance Management and SkyMars Tool Management.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O O O
LNC ITRI
O O
C# Sample StructMsg.alm_current2 _alm_current2;
StructMsg.Pwd _Pwd;
private void button8_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_current2(_Pwd, ref
_alm_current2);
if (ret == 0)

Precision Machinery Research Development Center - Intelligent technology department
39
{
txtC1.Text = _alm_current2.IsAlarm.ToString();
if (_alm_current2.IsAlarm)
{
txtC2.Text = _alm_current2.AlmClass[0];
txtC3.Text = _alm_current2.AlmCode[0];
txtC4.Text = _alm_current2.AlmMsg[0];
}
}
}
3. GET_alm_current_heid: Get the current alarm of HEIDENHAIN controller
API Name GET_alm_current_heid
Description Get the current alarm of HEIDENHAIN controller
C# Method short GET_alm_current_heid(StructMsg.Pwd P, ref
StructMsg.alm_current_heid R);
VB.Net
Method
GET_alm_current_heid(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_current_heid) As Short
Data
Structure
Structure name: alm_current_heid
Variable names Type [in/out] Description
IsAlarm bool out Detect if it alarms or
not.
ErrNumber int[] out Nuumber error.
ErrGroup string[] out Group error.
ErrClass string[] out Class error.
ErrMsg string[] out Error messages.
ErrDescription string[] out Error descriptions.
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O X X
LNC ITRI
X X
C# Sample StructMsg.alm_current_heid _alm_current_heid;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_current_heid(_Pwd, ref
Precision Machinery Research Development Center - Intelligent technology department
40
_alm_current_heid);
if (ret == 0 && _alm_current_heid.IsAlarm)
{
txtNumber.Text =
_alm_current_heid.ErrNumber[0].ToString();
txtGroup.Text = _alm_current_heid.ErrGroup[0];
txtClass.Text = _alm_current_heid.ErrClass[0];
txtMsg.Text = _alm_current_heid.ErrMsg[0];
txtDescription.Text =
_alm_current_heid.ErrDescription[0];
}
}
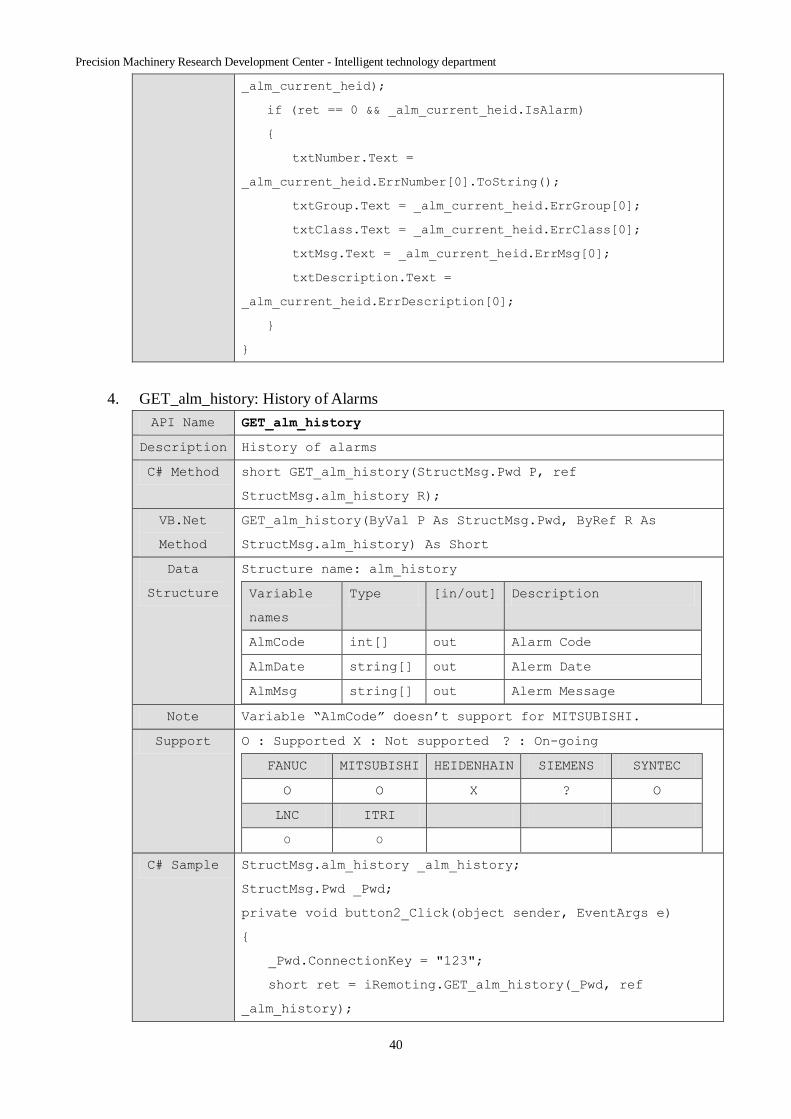
4. GET_alm_history: History of Alarms
API Name GET_alm_history
Description History of alarms
C# Method short GET_alm_history(StructMsg.Pwd P, ref
StructMsg.alm_history R);
VB.Net
Method
GET_alm_history(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_history) As Short
Data
Structure
Structure name: alm_history
Variable
names
Type [in/out] Description
AlmCode int[] out Alarm Code
AlmDate string[] out Alerm Date
AlmMsg string[] out Alerm Message
Note Variable “AlmCode” doesn’t support for MITSUBISHI.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.alm_history _alm_history;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_history(_Pwd, ref
_alm_history);
Precision Machinery Research Development Center - Intelligent technology department
41
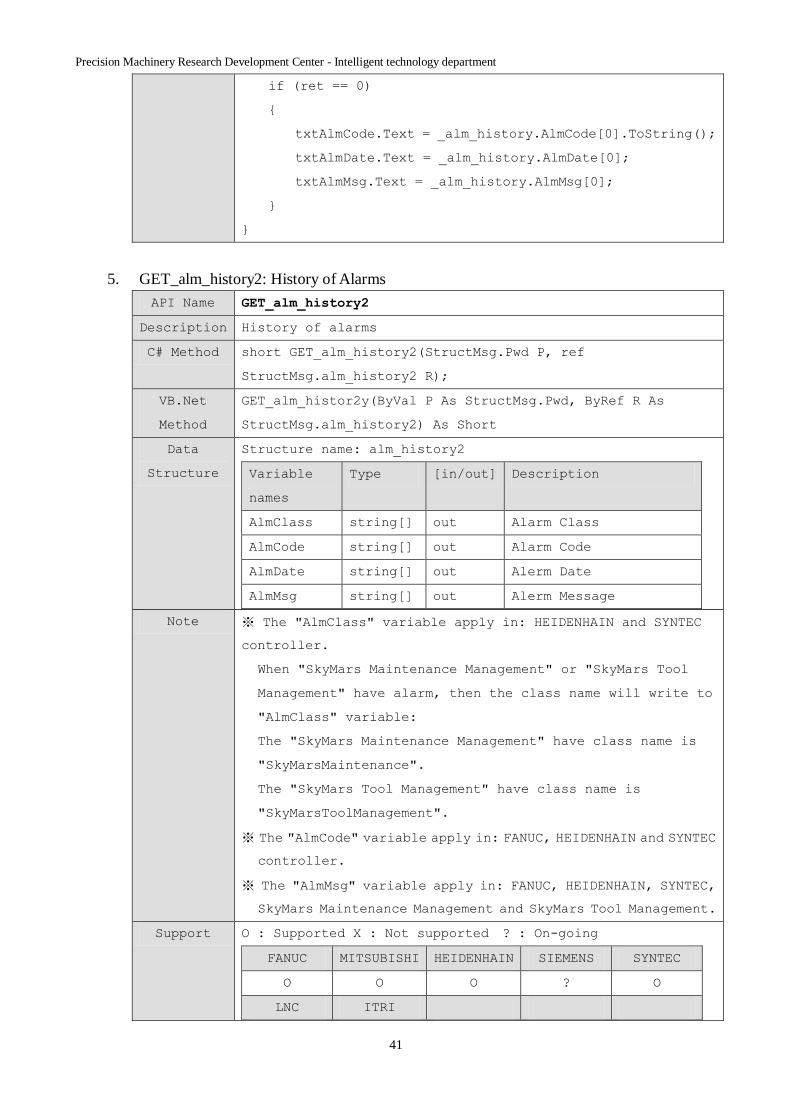
if (ret == 0)
{
txtAlmCode.Text = _alm_history.AlmCode[0].ToString();
txtAlmDate.Text = _alm_history.AlmDate[0];
txtAlmMsg.Text = _alm_history.AlmMsg[0];
}
}
5. GET_alm_history2: History of Alarms
API Name GET_alm_history2
Description History of alarms
C# Method short GET_alm_history2(StructMsg.Pwd P, ref
StructMsg.alm_history2 R);
VB.Net
Method
GET_alm_histor2y(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_history2) As Short
Data
Structure
Structure name: alm_history2
Variable
names
Type [in/out] Description
AlmClass string[] out Alarm Class
AlmCode string[] out Alarm Code
AlmDate string[] out Alerm Date
AlmMsg string[] out Alerm Message
Note ※ The "AlmClass" variable apply in: HEIDENHAIN and SYNTEC
controller.
When "SkyMars Maintenance Management" or "SkyMars Tool
Management" have alarm, then the class name will write to
"AlmClass" variable:
The "SkyMars Maintenance Management" have class name is
"SkyMarsMaintenance".
The "SkyMars Tool Management" have class name is
"SkyMarsToolManagement".
※ The "AlmCode" variable apply in: FANUC, HEIDENHAIN and SYNTEC
controller.
※ The "AlmMsg" variable apply in: FANUC, HEIDENHAIN, SYNTEC,
SkyMars Maintenance Management and SkyMars Tool Management.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
Precision Machinery Research Development Center - Intelligent technology department
42
O O
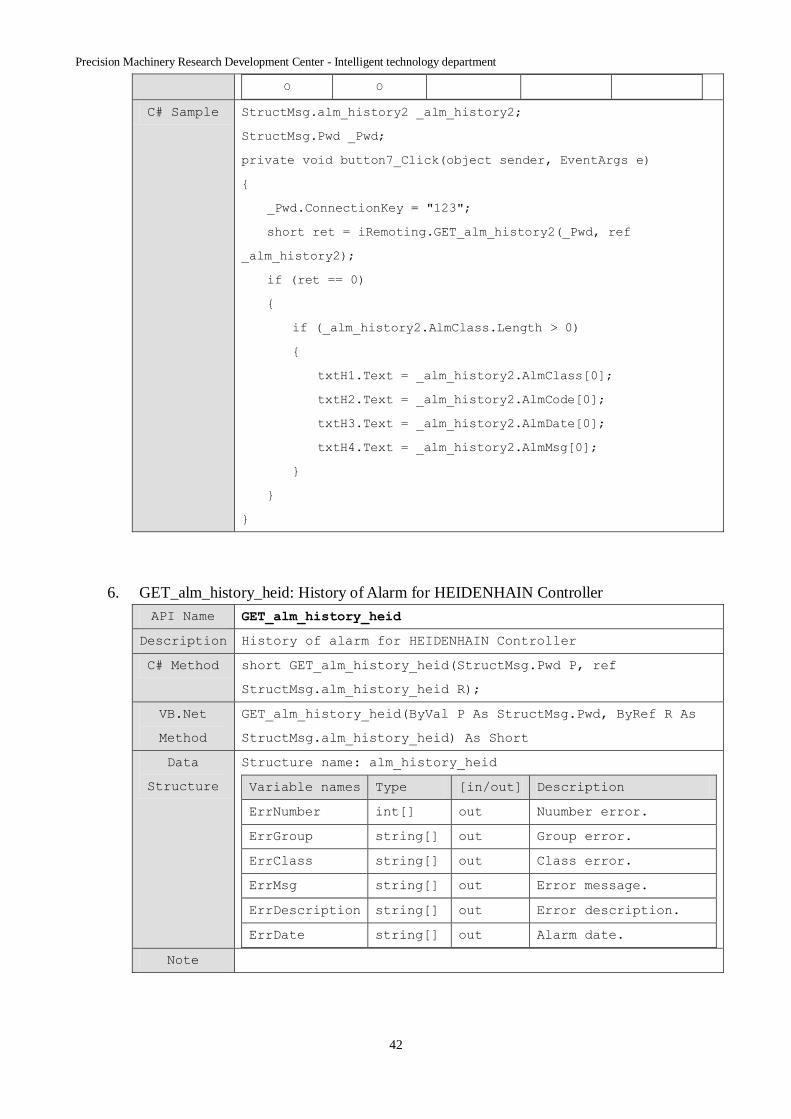
C# Sample StructMsg.alm_history2 _alm_history2;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_history2(_Pwd, ref
_alm_history2);
if (ret == 0)
{
if (_alm_history2.AlmClass.Length > 0)
{
txtH1.Text = _alm_history2.AlmClass[0];
txtH2.Text = _alm_history2.AlmCode[0];
txtH3.Text = _alm_history2.AlmDate[0];
txtH4.Text = _alm_history2.AlmMsg[0];
}
}
}
6. GET_alm_history_heid: History of Alarm for HEIDENHAIN Controller
API Name GET_alm_history_heid
Description History of alarm for HEIDENHAIN Controller
C# Method short GET_alm_history_heid(StructMsg.Pwd P, ref
StructMsg.alm_history_heid R);
VB.Net
Method
GET_alm_history_heid(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.alm_history_heid) As Short
Data
Structure
Structure name: alm_history_heid
Variable names Type [in/out] Description
ErrNumber int[] out Nuumber error.
ErrGroup string[] out Group error.
ErrClass string[] out Class error.
ErrMsg string[] out Error message.
ErrDescription string[] out Error description.
ErrDate string[] out Alarm date.
Note

Precision Machinery Research Development Center - Intelligent technology department
43
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O X X
LNC ITRI
X X
C# Sample StructMsg.alm_history_heid _alm_history_heid;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_alm_history_heid(_Pwd, ref
_alm_history_heid);
if (ret == 0)
{
DataTable dtHeid = new DataTable();
dtHeid.Columns.Add("HDate",
Type.GetType("System.String"));
dtHeid.Columns.Add("ErrNumber",
Type.GetType("System.Int32"));
dtHeid.Columns.Add("_Group",
Type.GetType("System.String"));
dtHeid.Columns.Add("_Class",
Type.GetType("System.String"));
dtHeid.Columns.Add("_Msg",
Type.GetType("System.String"));
dtHeid.Columns.Add("_Description",
Type.GetType("System.String"));
for (int i = 0; i <= _alm_history_heid.ErrNumber.Length -
1; i++)
{
DataRow dr = dtHeid.NewRow();
dr["HDate"] = _alm_history_heid.ErrDate[i];
dr["ErrNumber"] = _alm_history_heid.ErrNumber[i];
dr["_Group"] = _alm_history_heid.ErrGroup[i];
dr["_Class"] = _alm_history_heid.ErrClass[i];
dr["_Msg"] = _alm_history_heid.ErrMsg[i];
dr["_Description"] =
_alm_history_heid.ErrDescription[i];
dtHeid.Rows.Add(dr);
Precision Machinery Research Development Center - Intelligent technology department
44
}
dataGridView1.DataSource = dtHeid;
}
}
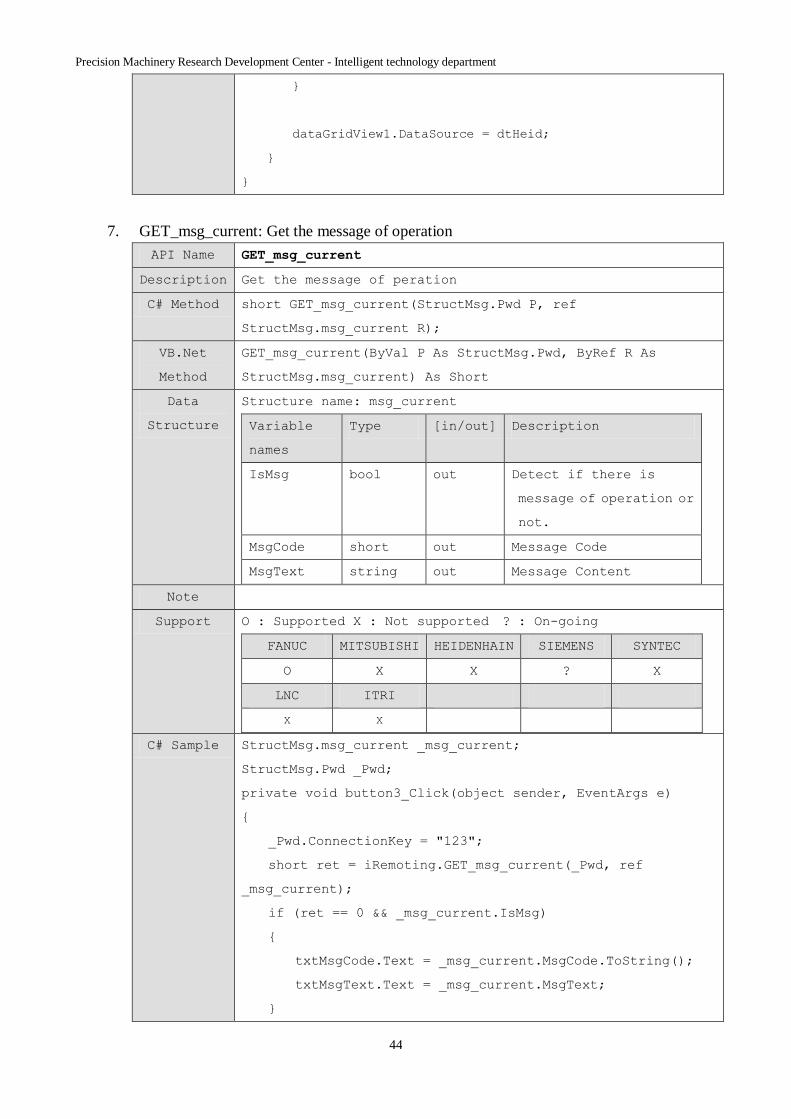
7. GET_msg_current: Get the message of operation
API Name GET_msg_current
Description Get the message of peration
C# Method short GET_msg_current(StructMsg.Pwd P, ref
StructMsg.msg_current R);
VB.Net
Method
GET_msg_current(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.msg_current) As Short
Data
Structure
Structure name: msg_current
Variable
names
Type [in/out] Description
IsMsg bool out Detect if there is
message of operation or
not.
MsgCode short out Message Code
MsgText string out Message Content
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X ? X
LNC ITRI
X X
C# Sample StructMsg.msg_current _msg_current;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_msg_current(_Pwd, ref
_msg_current);
if (ret == 0 && _msg_current.IsMsg)
{
txtMsgCode.Text = _msg_current.MsgCode.ToString();
txtMsgText.Text = _msg_current.MsgText;
}
Precision Machinery Research Development Center - Intelligent technology department
45
}
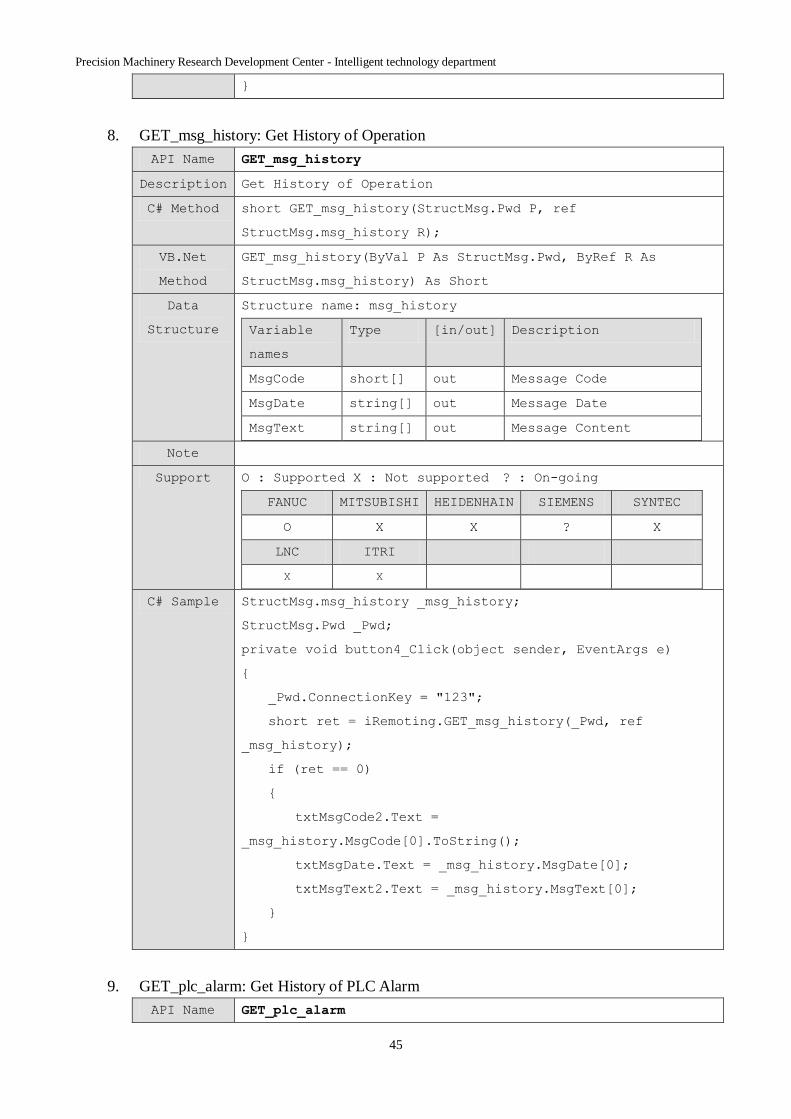
8. GET_msg_history: Get History of Operation
API Name GET_msg_history
Description Get History of Operation
C# Method short GET_msg_history(StructMsg.Pwd P, ref
StructMsg.msg_history R);
VB.Net
Method
GET_msg_history(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.msg_history) As Short
Data
Structure
Structure name: msg_history
Variable
names
Type [in/out] Description
MsgCode short[] out Message Code
MsgDate string[] out Message Date
MsgText string[] out Message Content
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X ? X
LNC ITRI
X X
C# Sample StructMsg.msg_history _msg_history;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_msg_history(_Pwd, ref
_msg_history);
if (ret == 0)
{
txtMsgCode2.Text =
_msg_history.MsgCode[0].ToString();
txtMsgDate.Text = _msg_history.MsgDate[0];
txtMsgText2.Text = _msg_history.MsgText[0];
}
}
9. GET_plc_alarm: Get History of PLC Alarm
API Name GET_plc_alarm

Precision Machinery Research Development Center - Intelligent technology department
46
Description Get History of PLC Alarm
C# Method short GET_plc_alarm(StructMsg.Pwd P, ref StructMsg.plc_alarm
R);
VB.Net
Method
GET_plc_alarm(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.plc_alarm) As Short
Data
Structure
Structure name: plc_alarm
Variable
names
Type [in/out] Description
AlmMsg string[] out Error Message of PLC
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X ? X
LNC ITRI
O ?
C# Sample StructMsg.plc_alarm _plc_alarm;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_plc_alarm(_Pwd, ref _plc_alarm);
if (ret == 0)
{
if (_plc_alarm.AlmMsg != null)
txtAlmMsg2.Text = _plc_alarm.AlmMsg[0];
}
}

Precision Machinery Research Development Center - Intelligent technology department
47
IX. The Functions of Servo Spindle
1. GET_servo_current: Current Loads of All Spindles
API Name GET_servo_current
Description Get Current Loads of All Spindles
C# Method short GET_servo_current(StructMsg.Pwd P, ref
StructMsg.servo_current R);
VB.Net
Method
GET_servo_current(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.servo_current) As Short
Data
Structure
Structure name: servo_current
Variable
names
Type [in/out] Description
AxisCurrent int[] out Current value of Axes
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X ? X
LNC ITRI
X X
C# Sample StructMsg.servo_current _servo_current;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_servo_current(_Pwd, ref
_servo_current);
if (ret == 0)
{
txtAxisCurrent.Text =
_servo_current.AxisCurrent[0].ToString();
}
}
2. GET_servo_load: Get the percentage of servo load (%)
API Name GET_servo_load
Description Get the percentage of servo load (%)
C# Method short GET_servo_load(StructMsg.Pwd P, ref
StructMsg.servo_load R);
VB.Net
Method
GET_servo_load(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.servo_load) As Short
Precision Machinery Research Development Center - Intelligent technology department
48
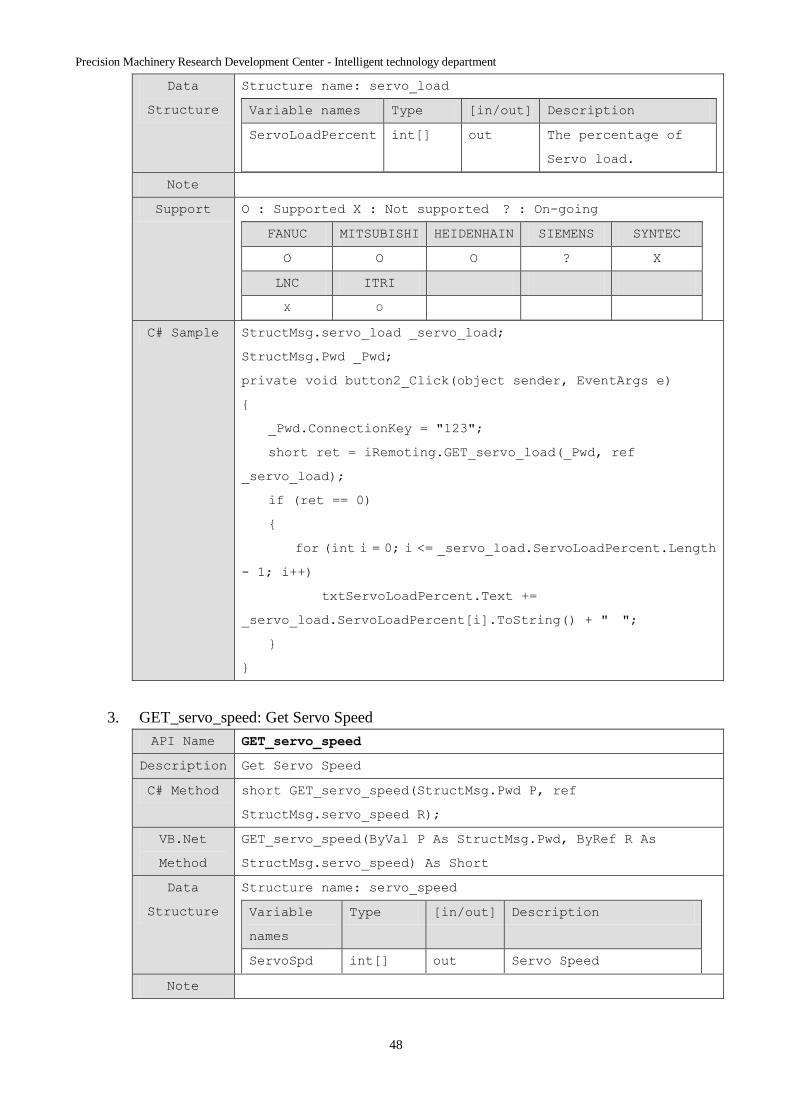
Data
Structure
Structure name: servo_load
Variable names Type [in/out] Description
ServoLoadPercent int[] out The percentage of
Servo load.
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? X
LNC ITRI
X O
C# Sample StructMsg.servo_load _servo_load;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_servo_load(_Pwd, ref
_servo_load);
if (ret == 0)
{
for (int i = 0; i <= _servo_load.ServoLoadPercent.Length
- 1; i++)
txtServoLoadPercent.Text +=
_servo_load.ServoLoadPercent[i].ToString() + " ";
}
}
3. GET_servo_speed: Get Servo Speed
API Name GET_servo_speed
Description Get Servo Speed
C# Method short GET_servo_speed(StructMsg.Pwd P, ref
StructMsg.servo_speed R);
VB.Net
Method
GET_servo_speed(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.servo_speed) As Short
Data
Structure
Structure name: servo_speed
Variable
names
Type [in/out] Description
ServoSpd int[] out Servo Speed
Note
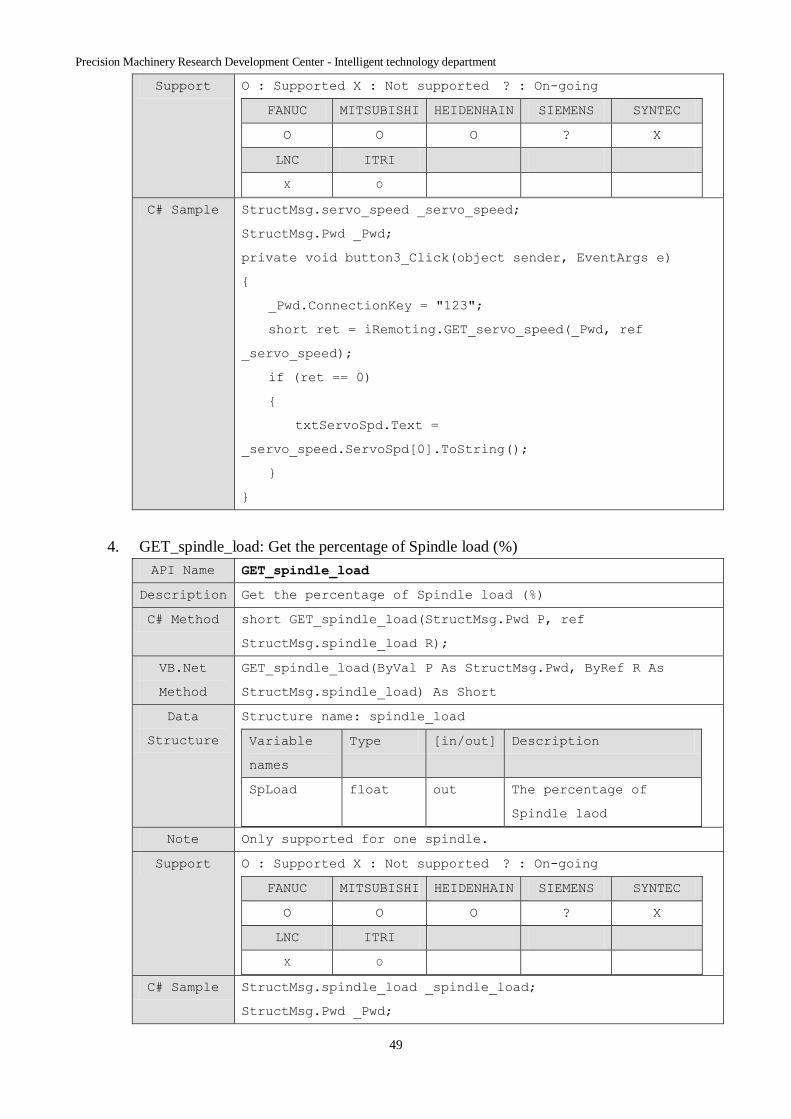
Precision Machinery Research Development Center - Intelligent technology department
49
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? X
LNC ITRI
X O
C# Sample StructMsg.servo_speed _servo_speed;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_servo_speed(_Pwd, ref
_servo_speed);
if (ret == 0)
{
txtServoSpd.Text =
_servo_speed.ServoSpd[0].ToString();
}
}
4. GET_spindle_load: Get the percentage of Spindle load (%)
API Name GET_spindle_load
Description Get the percentage of Spindle load (%)
C# Method short GET_spindle_load(StructMsg.Pwd P, ref
StructMsg.spindle_load R);
VB.Net
Method
GET_spindle_load(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.spindle_load) As Short
Data
Structure
Structure name: spindle_load
Variable
names
Type [in/out] Description
SpLoad float out The percentage of
Spindle laod
Note Only supported for one spindle.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? X
LNC ITRI
X O
C# Sample StructMsg.spindle_load _spindle_load;
StructMsg.Pwd _Pwd;
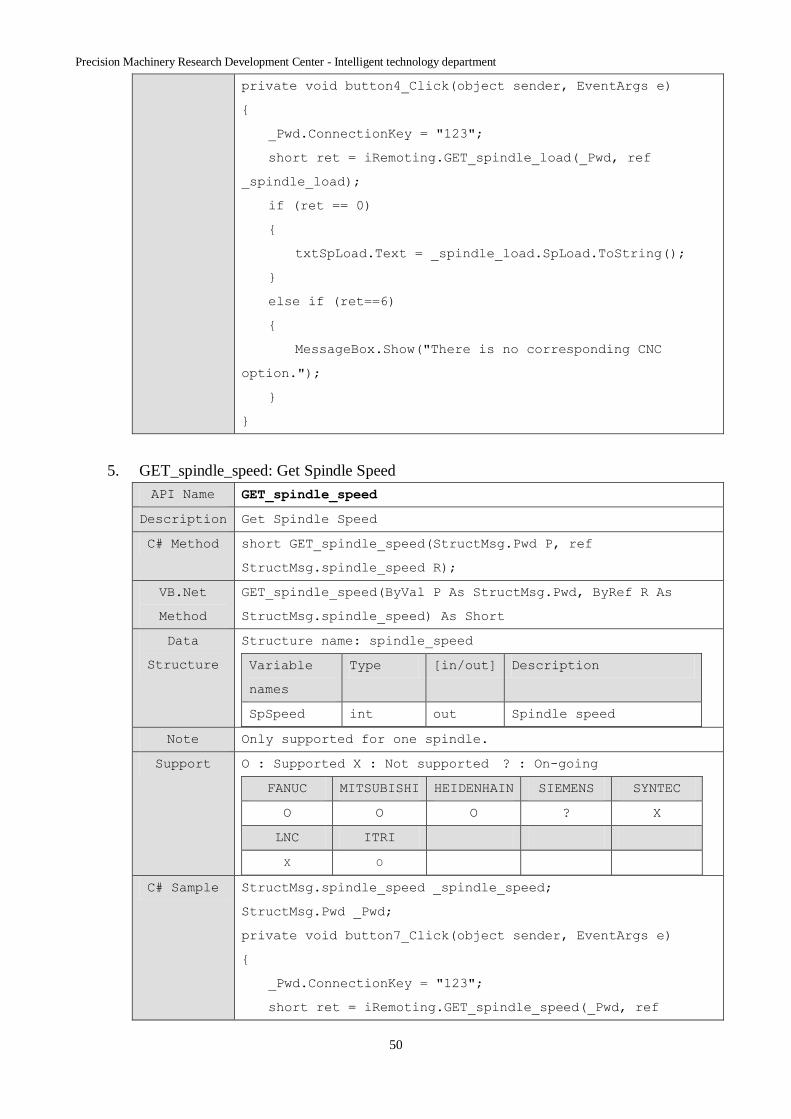
Precision Machinery Research Development Center - Intelligent technology department
50
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_spindle_load(_Pwd, ref
_spindle_load);
if (ret == 0)
{
txtSpLoad.Text = _spindle_load.SpLoad.ToString();
}
else if (ret==6)
{
MessageBox.Show("There is no corresponding CNC
option.");
}
}
5. GET_spindle_speed: Get Spindle Speed
API Name GET_spindle_speed
Description Get Spindle Speed
C# Method short GET_spindle_speed(StructMsg.Pwd P, ref
StructMsg.spindle_speed R);
VB.Net
Method
GET_spindle_speed(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.spindle_speed) As Short
Data
Structure
Structure name: spindle_speed
Variable
names
Type [in/out] Description
SpSpeed int out Spindle speed
Note Only supported for one spindle.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? X
LNC ITRI
X O
C# Sample StructMsg.spindle_speed _spindle_speed;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_spindle_speed(_Pwd, ref
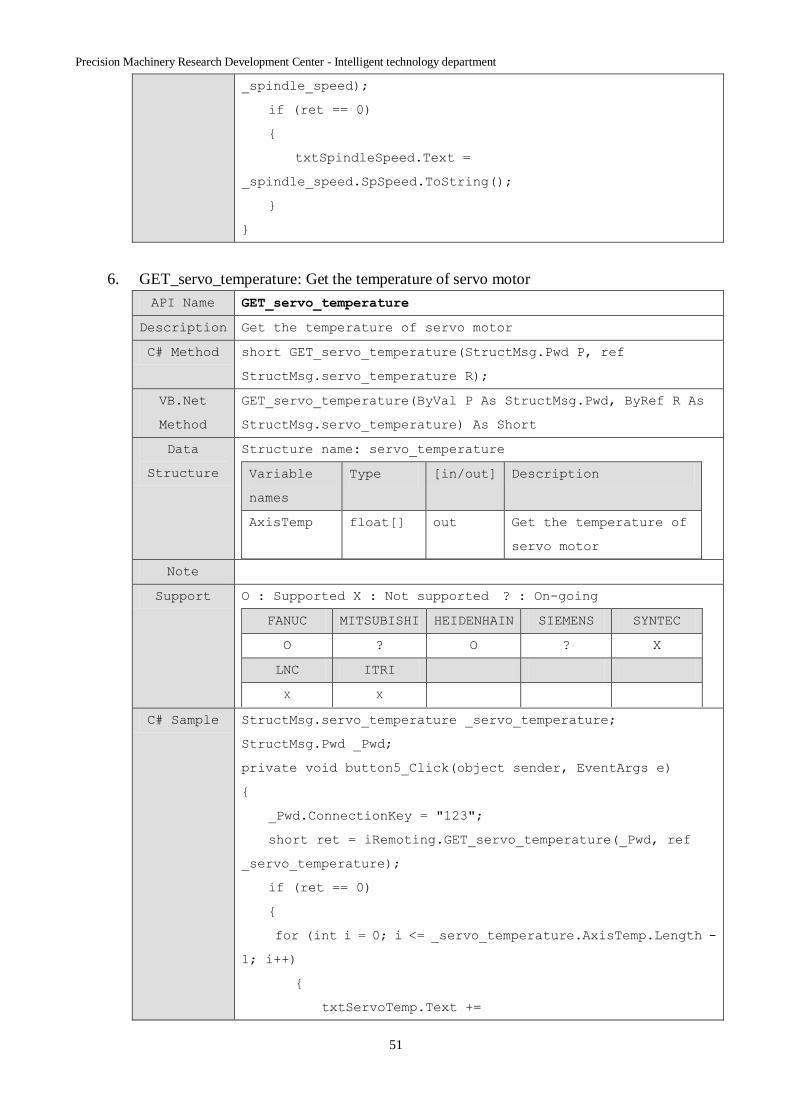
Precision Machinery Research Development Center - Intelligent technology department
51
_spindle_speed);
if (ret == 0)
{
txtSpindleSpeed.Text =
_spindle_speed.SpSpeed.ToString();
}
}
6. GET_servo_temperature: Get the temperature of servo motor
API Name GET_servo_temperature
Description Get the temperature of servo motor
C# Method short GET_servo_temperature(StructMsg.Pwd P, ref
StructMsg.servo_temperature R);
VB.Net
Method
GET_servo_temperature(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.servo_temperature) As Short
Data
Structure
Structure name: servo_temperature
Variable
names
Type [in/out] Description
AxisTemp float[] out Get the temperature of
servo motor
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? O ? X
LNC ITRI
X X
C# Sample StructMsg.servo_temperature _servo_temperature;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_servo_temperature(_Pwd, ref
_servo_temperature);
if (ret == 0)
{
for (int i = 0; i <= _servo_temperature.AxisTemp.Length -
1; i++)
{
txtServoTemp.Text +=
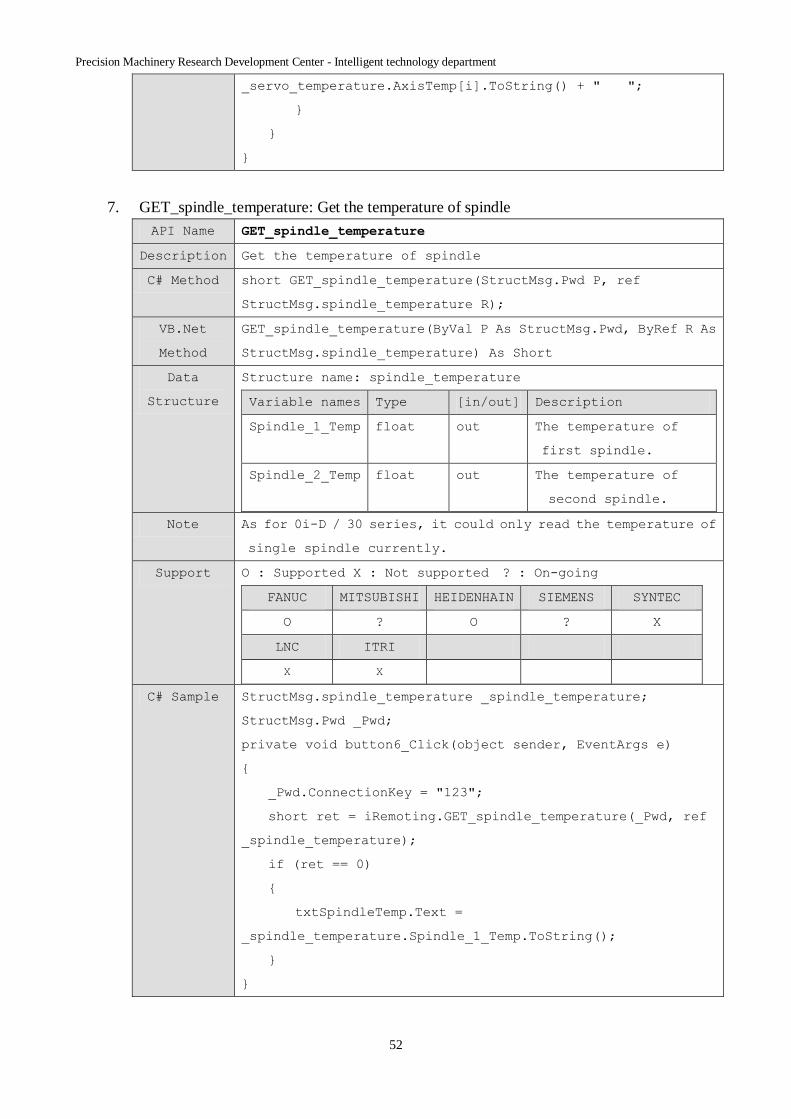
Precision Machinery Research Development Center - Intelligent technology department
52
_servo_temperature.AxisTemp[i].ToString() + " ";
}
}
}
7. GET_spindle_temperature: Get the temperature of spindle
API Name GET_spindle_temperature
Description Get the temperature of spindle
C# Method short GET_spindle_temperature(StructMsg.Pwd P, ref
StructMsg.spindle_temperature R);
VB.Net
Method
GET_spindle_temperature(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.spindle_temperature) As Short
Data
Structure
Structure name: spindle_temperature
Variable names Type [in/out] Description
Spindle_1_Temp float out The temperature of
first spindle.
Spindle_2_Temp float out The temperature of
second spindle.
Note As for 0i-D / 30 series, it could only read the temperature of
single spindle currently.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? O ? X
LNC ITRI
X X
C# Sample StructMsg.spindle_temperature _spindle_temperature;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_spindle_temperature(_Pwd, ref
_spindle_temperature);
if (ret == 0)
{
txtSpindleTemp.Text =
_spindle_temperature.Spindle_1_Temp.ToString();
}
}
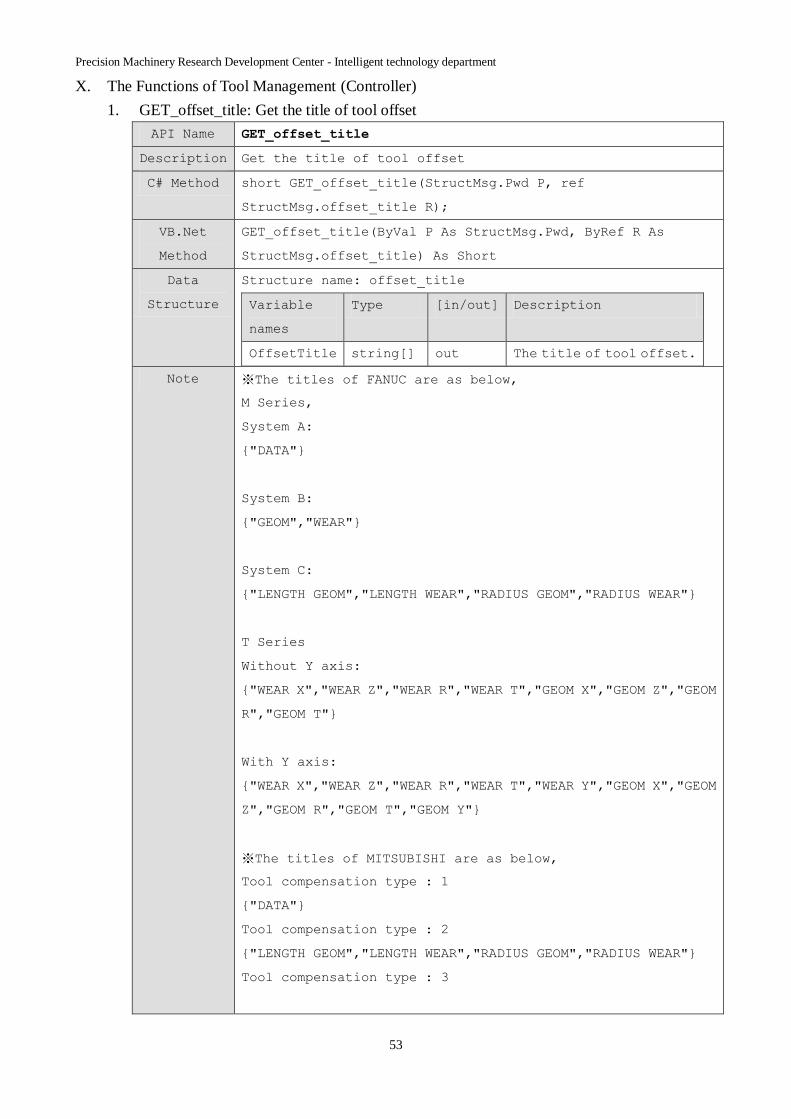
Precision Machinery Research Development Center - Intelligent technology department
53
X. The Functions of Tool Management (Controller)
1. GET_offset_title: Get the title of tool offset
API Name GET_offset_title
Description Get the title of tool offset
C# Method short GET_offset_title(StructMsg.Pwd P, ref
StructMsg.offset_title R);
VB.Net
Method
GET_offset_title(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_title) As Short
Data
Structure
Structure name: offset_title
Variable
names
Type [in/out] Description
OffsetTitle string[] out The title of tool offset.
Note ※The titles of FANUC are as below,
M Series,
System A:
{"DATA"}
System B:
{"GEOM","WEAR"}
System C:
{"LENGTH GEOM","LENGTH WEAR","RADIUS GEOM","RADIUS WEAR"}
T Series
Without Y axis:
{"WEAR X","WEAR Z","WEAR R","WEAR T","GEOM X","GEOM Z","GEOM
R","GEOM T"}
With Y axis:
{"WEAR X","WEAR Z","WEAR R","WEAR T","WEAR Y","GEOM X","GEOM
Z","GEOM R","GEOM T","GEOM Y"}
※The titles of MITSUBISHI are as below,
Tool compensation type : 1
{"DATA"}
Tool compensation type : 2
{"LENGTH GEOM","LENGTH WEAR","RADIUS GEOM","RADIUS WEAR"}
Tool compensation type : 3

Precision Machinery Research Development Center - Intelligent technology department
54
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_title _offset_title;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_offset_title(_Pwd, ref
_offset_title);
if (ret == 0)
{
for (int i = 0; i <= _offset_title.OffsetTitle.Length
- 1; i++)
rtbTitle.Text += _offset_title.OffsetTitle[i] + "
";
}
}
2. GET_offset_all: Get the Offset of all tools
API Name GET_offset_all
Description Get the Offset of all tools
C# Method short GET_offset_all(StructMsg.Pwd P, ref
StructMsg.offset_all R);
VB.Net
Method
GET_offset_all(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_all) As Short
Data
Structure
Structure name: offset_all
Variable
names
Type [in/out] Description
OffsetData double[][] out The offset data
Note The second array of OffsetData, Please refer to the title.
(Length Geom…)
Using this function may spend lots of time reading data.
(Generally, it usually happens on a low-speed internet adapter.)
Please use “GET_offset_scope” to read by segment.
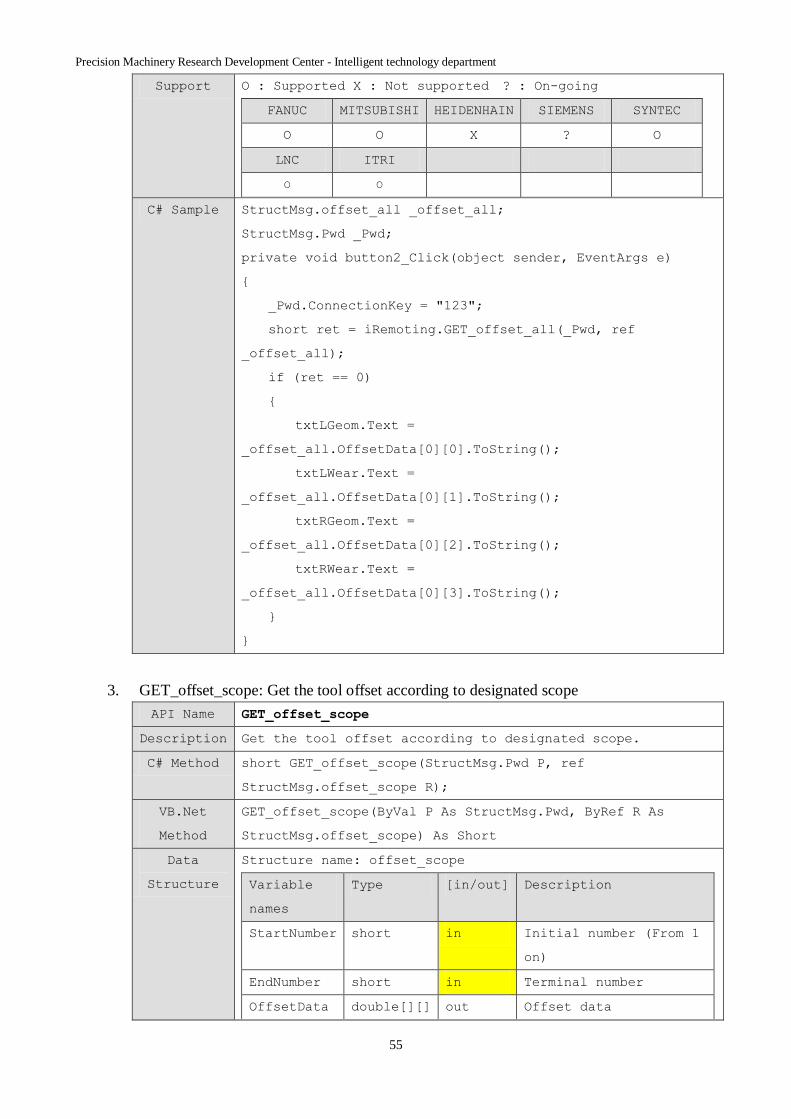
Precision Machinery Research Development Center - Intelligent technology department
55
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_all _offset_all;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_offset_all(_Pwd, ref
_offset_all);
if (ret == 0)
{
txtLGeom.Text =
_offset_all.OffsetData[0][0].ToString();
txtLWear.Text =
_offset_all.OffsetData[0][1].ToString();
txtRGeom.Text =
_offset_all.OffsetData[0][2].ToString();
txtRWear.Text =
_offset_all.OffsetData[0][3].ToString();
}
}
3. GET_offset_scope: Get the tool offset according to designated scope
API Name GET_offset_scope
Description Get the tool offset according to designated scope.
C# Method short GET_offset_scope(StructMsg.Pwd P, ref
StructMsg.offset_scope R);
VB.Net
Method
GET_offset_scope(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_scope) As Short
Data
Structure
Structure name: offset_scope
Variable
names
Type [in/out] Description
StartNumber short in Initial number (From 1
on)
EndNumber short in Terminal number
OffsetData double[][] out Offset data
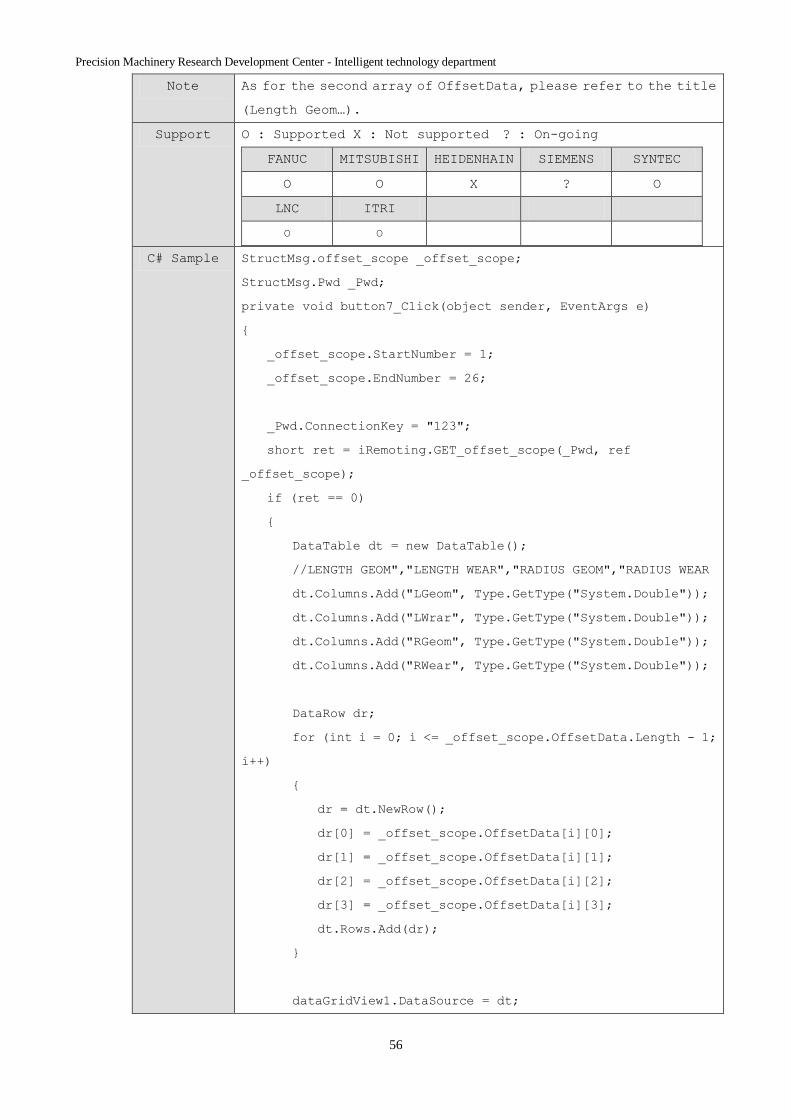
Precision Machinery Research Development Center - Intelligent technology department
56
Note As for the second array of OffsetData, please refer to the title
(Length Geom…).
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_scope _offset_scope;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
_offset_scope.StartNumber = 1;
_offset_scope.EndNumber = 26;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_offset_scope(_Pwd, ref
_offset_scope);
if (ret == 0)
{
DataTable dt = new DataTable();
//LENGTH GEOM","LENGTH WEAR","RADIUS GEOM","RADIUS WEAR
dt.Columns.Add("LGeom", Type.GetType("System.Double"));
dt.Columns.Add("LWrar", Type.GetType("System.Double"));
dt.Columns.Add("RGeom", Type.GetType("System.Double"));
dt.Columns.Add("RWear", Type.GetType("System.Double"));
DataRow dr;
for (int i = 0; i <= _offset_scope.OffsetData.Length - 1;
i++)
{
dr = dt.NewRow();
dr[0] = _offset_scope.OffsetData[i][0];
dr[1] = _offset_scope.OffsetData[i][1];
dr[2] = _offset_scope.OffsetData[i][2];
dr[3] = _offset_scope.OffsetData[i][3];
dt.Rows.Add(dr);
}
dataGridView1.DataSource = dt;
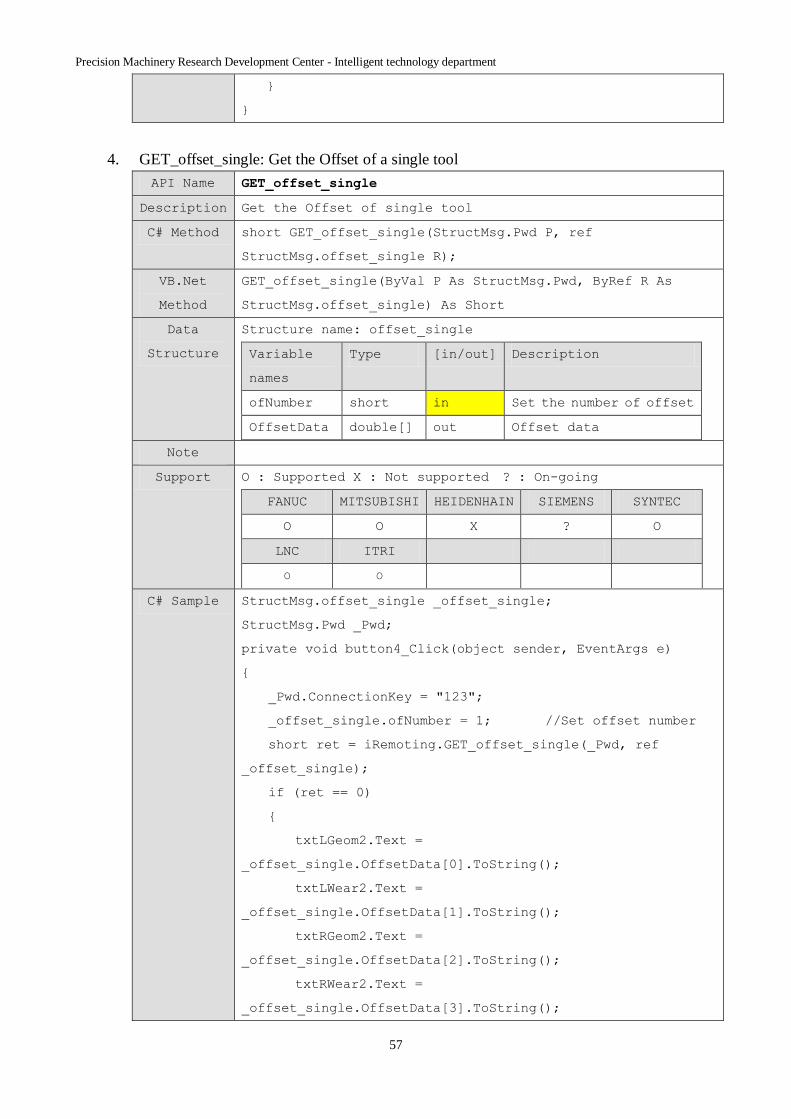
Precision Machinery Research Development Center - Intelligent technology department
57
}
}
4. GET_offset_single: Get the Offset of a single tool
API Name GET_offset_single
Description Get the Offset of single tool
C# Method short GET_offset_single(StructMsg.Pwd P, ref
StructMsg.offset_single R);
VB.Net
Method
GET_offset_single(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_single) As Short
Data
Structure
Structure name: offset_single
Variable
names
Type [in/out] Description
ofNumber short in Set the number of offset
OffsetData double[] out Offset data
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_single _offset_single;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_offset_single.ofNumber = 1; //Set offset number
short ret = iRemoting.GET_offset_single(_Pwd, ref
_offset_single);
if (ret == 0)
{
txtLGeom2.Text =
_offset_single.OffsetData[0].ToString();
txtLWear2.Text =
_offset_single.OffsetData[1].ToString();
txtRGeom2.Text =
_offset_single.OffsetData[2].ToString();
txtRWear2.Text =
_offset_single.OffsetData[3].ToString();

Precision Machinery Research Development Center - Intelligent technology department
58
}
}
5. SET_offset_all: Write the Offsets of all tools
API Name SET_offset_all
Description Write the Offsets of all tools
C# Method short SET_offset_all(StructMsg.Pwd P, StructMsg.offset_all
R);
VB.Net
Method
SET_offset_all(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_all) As Short
Data
Structure
Structure name: offset_all
Variable
names
Type [in/out] Description
OffsetData double[][] in Set offset data
Note ※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_all _offset_all;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_offset_all(_Pwd, ref
_offset_all);
_offset_all.OffsetData[0][0] =
double.Parse(txtLGeom3.Text);
_offset_all.OffsetData[0][1] =
double.Parse(txtLWear3.Text);
_offset_all.OffsetData[0][2] =
double.Parse(txtRGeom3.Text);
_offset_all.OffsetData[0][3] =
double.Parse(txtRWear3.Text);
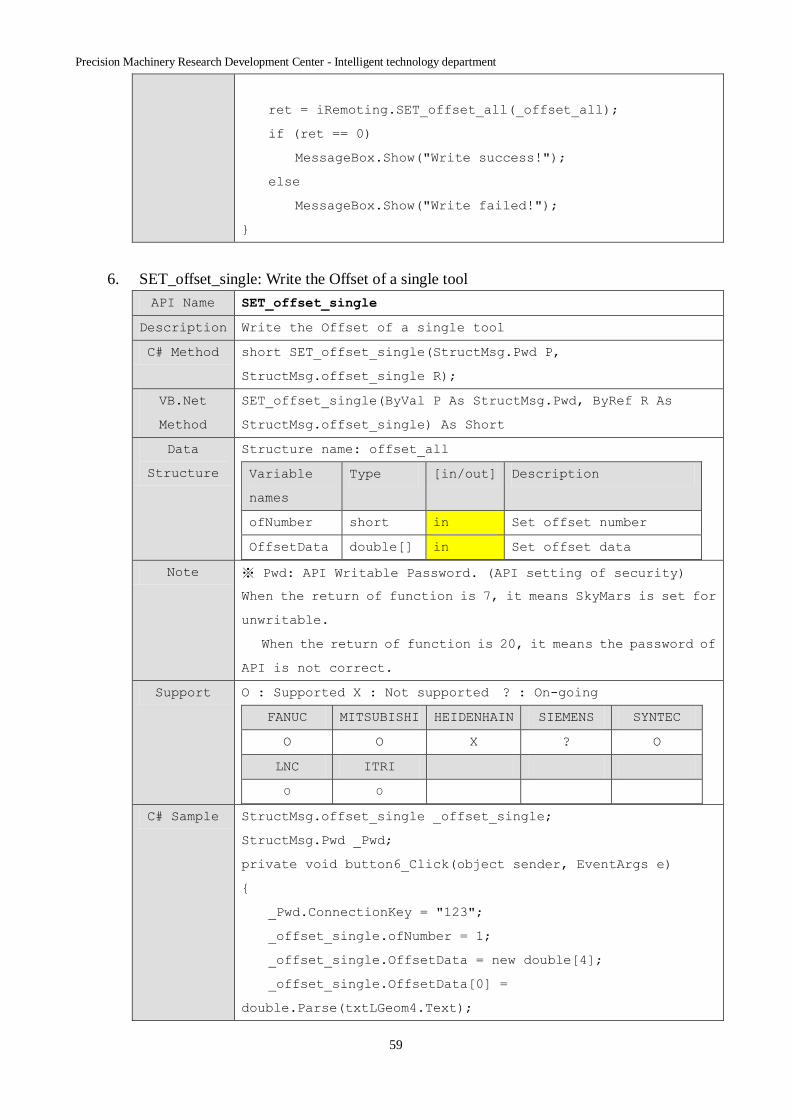
Precision Machinery Research Development Center - Intelligent technology department
59
ret = iRemoting.SET_offset_all(_offset_all);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed!");
}
6. SET_offset_single: Write the Offset of a single tool
API Name SET_offset_single
Description Write the Offset of a single tool
C# Method short SET_offset_single(StructMsg.Pwd P,
StructMsg.offset_single R);
VB.Net
Method
SET_offset_single(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.offset_single) As Short
Data
Structure
Structure name: offset_all
Variable
names
Type [in/out] Description
ofNumber short in Set offset number
OffsetData double[] in Set offset data
Note ※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set for
unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.offset_single _offset_single;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_offset_single.ofNumber = 1;
_offset_single.OffsetData = new double[4];
_offset_single.OffsetData[0] =
double.Parse(txtLGeom4.Text);
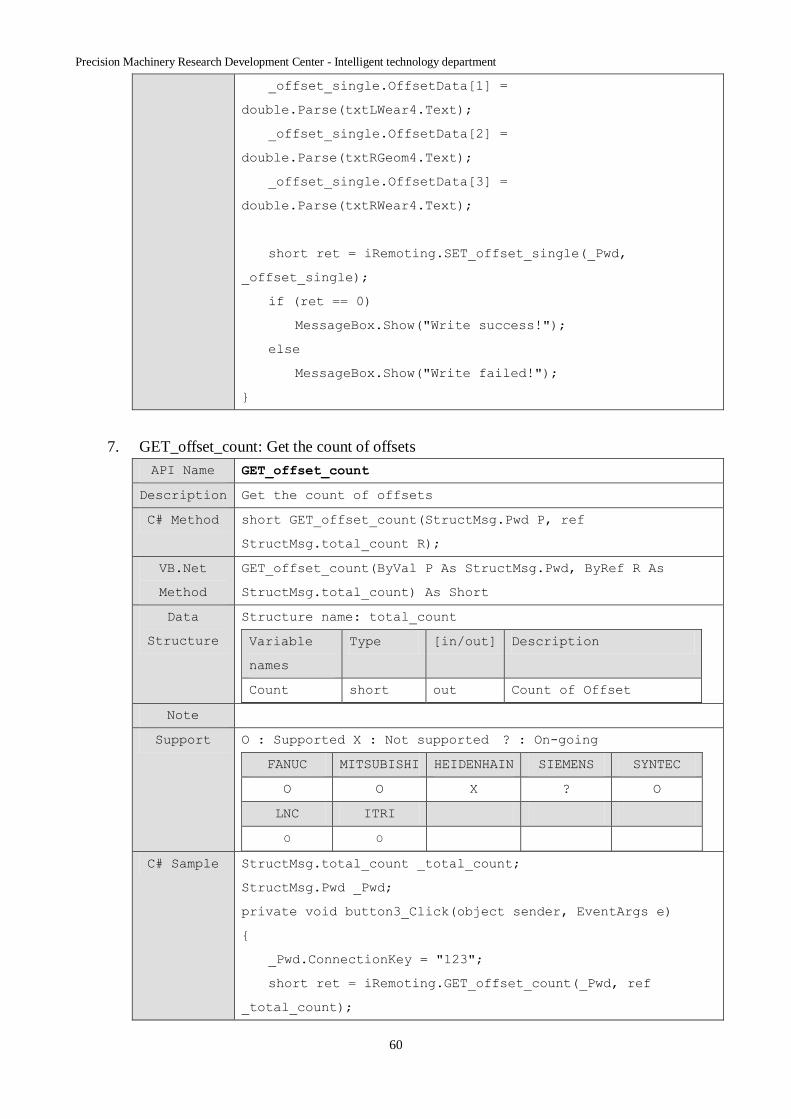
Precision Machinery Research Development Center - Intelligent technology department
60
_offset_single.OffsetData[1] =
double.Parse(txtLWear4.Text);
_offset_single.OffsetData[2] =
double.Parse(txtRGeom4.Text);
_offset_single.OffsetData[3] =
double.Parse(txtRWear4.Text);
short ret = iRemoting.SET_offset_single(_Pwd,
_offset_single);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed!");
}
7. GET_offset_count: Get the count of offsets
API Name GET_offset_count
Description Get the count of offsets
C# Method short GET_offset_count(StructMsg.Pwd P, ref
StructMsg.total_count R);
VB.Net
Method
GET_offset_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.total_count) As Short
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Count short out Count of Offset
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.total_count _total_count;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_offset_count(_Pwd, ref
_total_count);
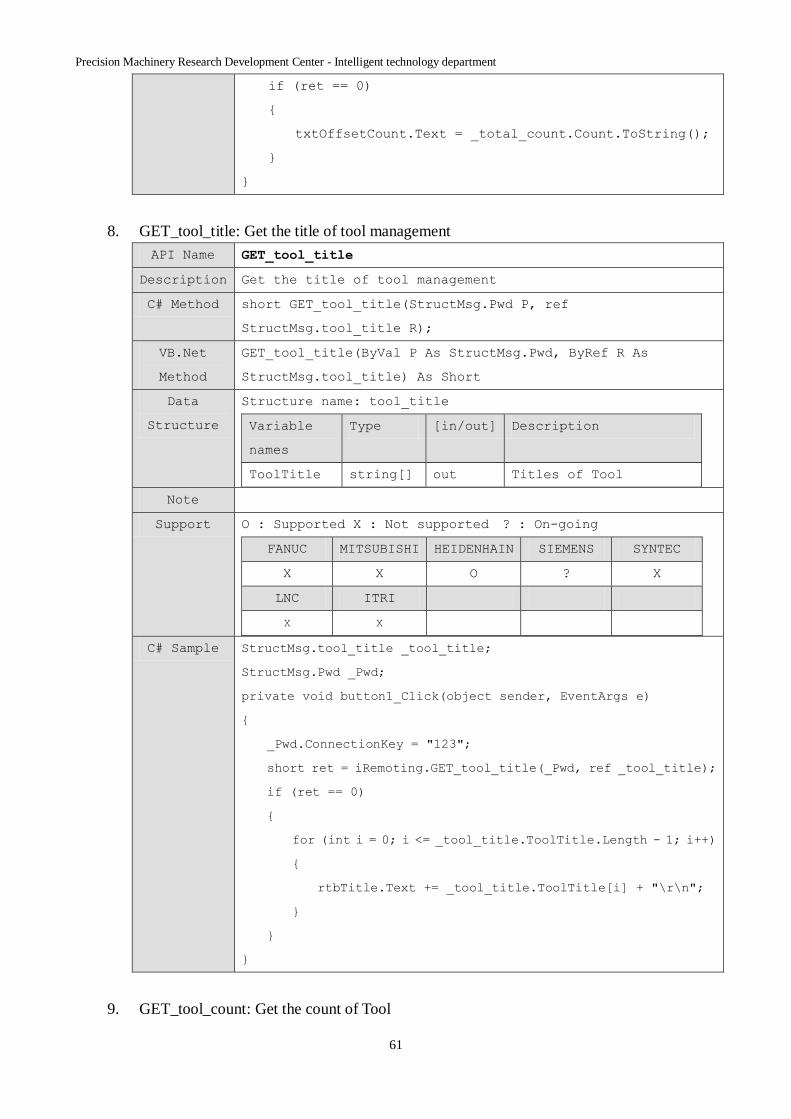
Precision Machinery Research Development Center - Intelligent technology department
61
if (ret == 0)
{
txtOffsetCount.Text = _total_count.Count.ToString();
}
}
8. GET_tool_title: Get the title of tool management
API Name GET_tool_title
Description Get the title of tool management
C# Method short GET_tool_title(StructMsg.Pwd P, ref
StructMsg.tool_title R);
VB.Net
Method
GET_tool_title(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.tool_title) As Short
Data
Structure
Structure name: tool_title
Variable
names
Type [in/out] Description
ToolTitle string[] out Titles of Tool
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.tool_title _tool_title;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_tool_title(_Pwd, ref _tool_title);
if (ret == 0)
{
for (int i = 0; i <= _tool_title.ToolTitle.Length - 1; i++)
{
rtbTitle.Text += _tool_title.ToolTitle[i] + "\r\n";
}
}
}
9. GET_tool_count: Get the count of Tool
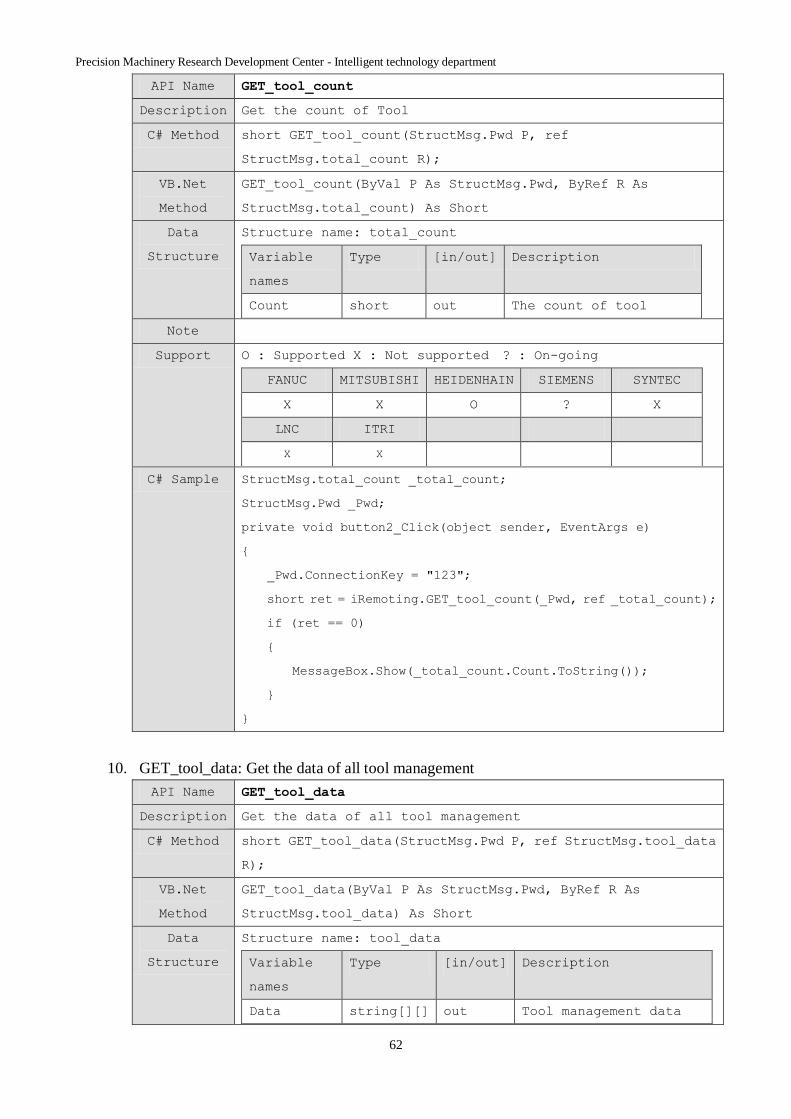
Precision Machinery Research Development Center - Intelligent technology department
62
API Name GET_tool_count
Description Get the count of Tool
C# Method short GET_tool_count(StructMsg.Pwd P, ref
StructMsg.total_count R);
VB.Net
Method
GET_tool_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.total_count) As Short
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Count short out The count of tool
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.total_count _total_count;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_tool_count(_Pwd, ref _total_count);
if (ret == 0)
{
MessageBox.Show(_total_count.Count.ToString());
}
}
10. GET_tool_data: Get the data of all tool management
API Name GET_tool_data
Description Get the data of all tool management
C# Method short GET_tool_data(StructMsg.Pwd P, ref StructMsg.tool_data
R);
VB.Net
Method
GET_tool_data(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.tool_data) As Short
Data
Structure
Structure name: tool_data
Variable
names
Type [in/out] Description
Data string[][] out Tool management data
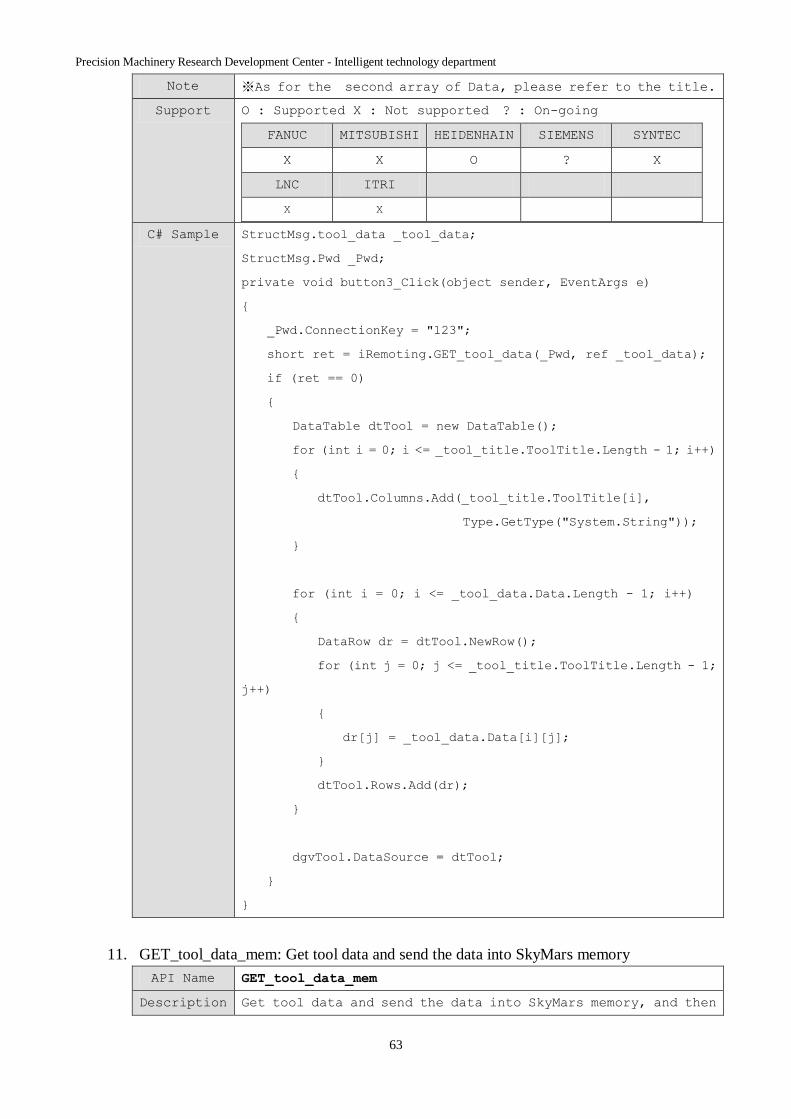
Precision Machinery Research Development Center - Intelligent technology department
63
Note ※As for the second array of Data, please refer to the title.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.tool_data _tool_data;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_tool_data(_Pwd, ref _tool_data);
if (ret == 0)
{
DataTable dtTool = new DataTable();
for (int i = 0; i <= _tool_title.ToolTitle.Length - 1; i++)
{
dtTool.Columns.Add(_tool_title.ToolTitle[i],
Type.GetType("System.String"));
}
for (int i = 0; i <= _tool_data.Data.Length - 1; i++)
{
DataRow dr = dtTool.NewRow();
for (int j = 0; j <= _tool_title.ToolTitle.Length - 1;
j++)
{
dr[j] = _tool_data.Data[i][j];
}
dtTool.Rows.Add(dr);
}
dgvTool.DataSource = dtTool;
}
}
11. GET_tool_data_mem: Get tool data and send the data into SkyMars memory
API Name GET_tool_data_mem
Description Get tool data and send the data into SkyMars memory, and then

Precision Machinery Research Development Center - Intelligent technology department
64
return the max index value of data array
C# Method short GET_tool_data_mem(StructMsg.Pwd P, ref
StructMsg.tool_data_max_index R);
VB.Net
Method
Data
Structure
Structure name: tool_data_max_index
Variable
names
Type [in/out] Description
MaxIndex int out The max index value of
data array.
Note If you need to read the data of tool management by segment, please
execute the function “GET_tool_data_mem” first, and use the
function “GET_tool_data_scope”, and then read the data of
indicated index.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.tool_data_max_index _ToolMaxIndex;
StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
ret = iRemoting.GET_tool_data_mem(_Pwd, ref _ToolMaxIndex);
12. GET_tool_data_scope: Get the data of Tool management and return the data of indicated
index
API Name GET_tool_data_scope
Description Get the data of Tool management and return the data of indicated
index.
C# Method short GET_tool_data_scope(StructMsg.Pwd P, ref
StructMsg.tool_data_scope R);
VB.Net
Method
Data
Structure
Structure name: tool_data_scope
Variable
names
Type [in/out] Description
StartIndex int in Start Index
EndIndex int in End Index
Data string[][] out Data

Precision Machinery Research Development Center - Intelligent technology department
65
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.tool_data_scope _DataScope;
StructMsg.Pwd _Pwd;
for (int i = 0; i <= _ToolMaxIndex.MaxIndex; i += 20)
{
_DataScope.StartIndex = i;
if ((i + 20) <= _ToolMaxIndex.MaxIndex)
_DataScope.EndIndex = i + 20 - 1;
else
_DataScope.EndIndex = _ToolMaxIndex.MaxIndex;
_Pwd.ConnectionKey = "123";
ret = iRemoting.GET_tool_data_scope(_Pwd, ref _DataScope);
if (ret == 0)
{
for (int j = 0; j <= _DataScope.Data.Length - 1; j++)
{
DataRow dr = dtTool.NewRow();
for (int s = 0; s <= _tool_title.ToolTitle.Length - 1;
s++)
{
dr[s] = _DataScope.Data[j][s];
}
dtTool.Rows.Add(dr);
}
}
}
13. SET_tool_data: Write the data of management tool
API Name SET_tool_data
Description Write the data of management tool
C# Method short SET_tool_data(StructMsg.Pwd P, StructMsg.tool_data R);
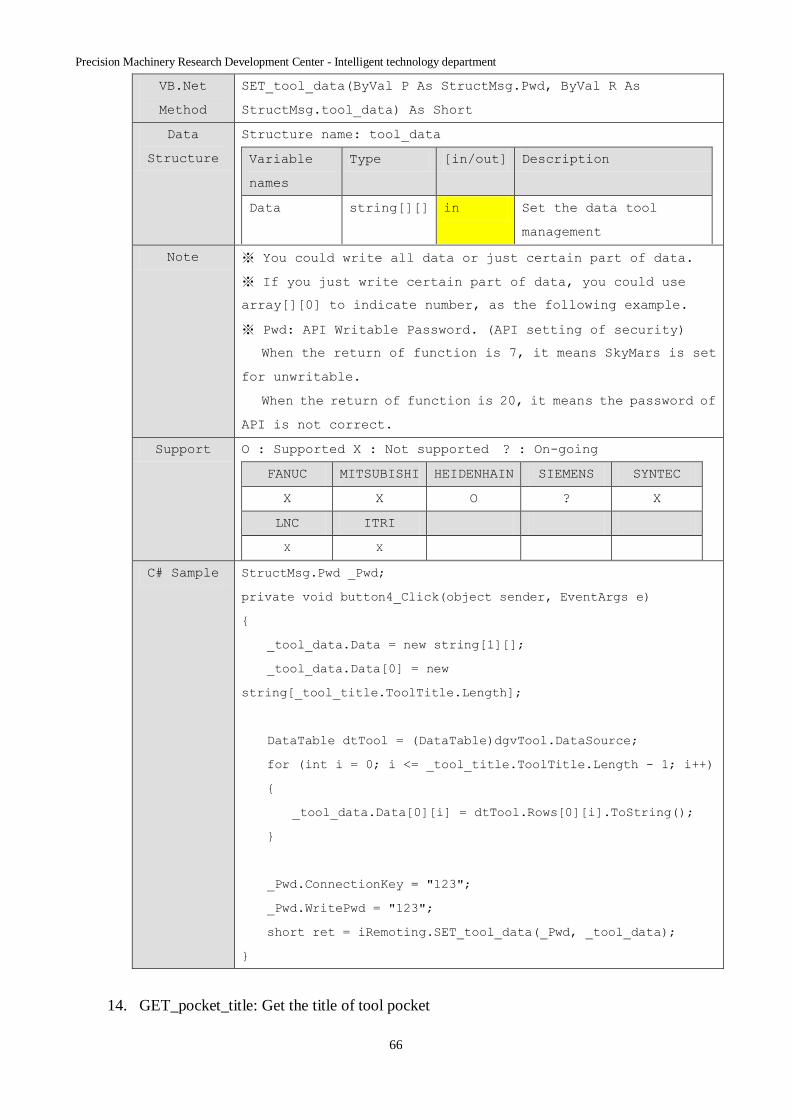
Precision Machinery Research Development Center - Intelligent technology department
66
VB.Net
Method
SET_tool_data(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.tool_data) As Short
Data
Structure
Structure name: tool_data
Variable
names
Type [in/out] Description
Data string[][] in Set the data tool
management
Note ※ You could write all data or just certain part of data.
※ If you just write certain part of data, you could use
array[][0] to indicate number, as the following example.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_tool_data.Data = new string[1][];
_tool_data.Data[0] = new
string[_tool_title.ToolTitle.Length];
DataTable dtTool = (DataTable)dgvTool.DataSource;
for (int i = 0; i <= _tool_title.ToolTitle.Length - 1; i++)
{
_tool_data.Data[0][i] = dtTool.Rows[0][i].ToString();
}
_Pwd.ConnectionKey = "123";
_Pwd.WritePwd = "123";
short ret = iRemoting.SET_tool_data(_Pwd, _tool_data);
}
14. GET_pocket_title: Get the title of tool pocket

Precision Machinery Research Development Center - Intelligent technology department
67
API Name GET_pocket_title
Description Get the title of tool pocket
C# Method short GET_pocket_title(StructMsg.Pwd P, ref
StructMsg.pocket_title R);
VB.Net
Method
GET_pocket_title(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.pocket_title) As Short
Data
Structure
Structure name: pocket_title
Variable
names
Type [in/out] Description
PocketTitle string[] out The title of Tool Pocket
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.pocket_title _pocket_title;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_pocket_title(_Pwd, ref
_pocket_title);
if (ret == 0)
{
for (int i = 0; i <= _pocket_title.PocketTitle.Length - 1;
i++)
{
rtbTitle.Text += _pocket_title.PocketTitle[i] +
"\r\n";
}
}
}
15. GET_pocket_count: Get the count of tool pocket
API Name GET_pocket_count
Description Get the count of tool pocket
C# Method short GET_pocket_count(StructMsg.Pwd P, ref
StructMsg.total_count R);
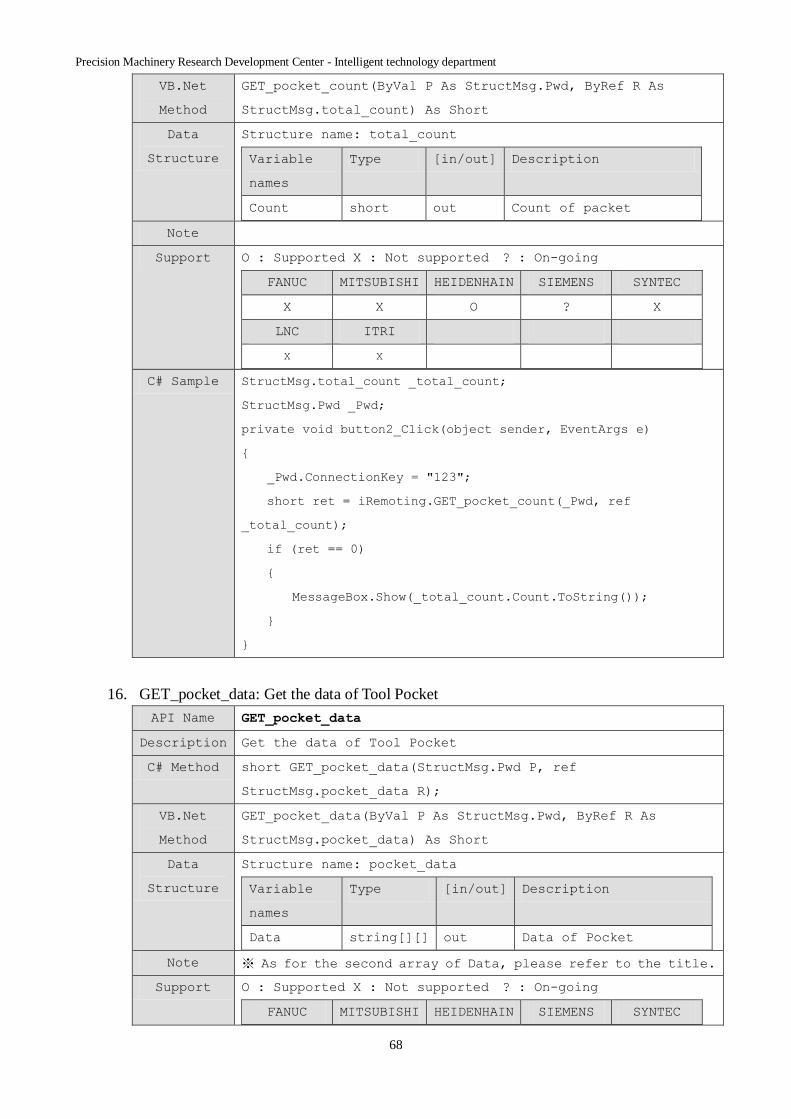
Precision Machinery Research Development Center - Intelligent technology department
68
VB.Net
Method
GET_pocket_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.total_count) As Short
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Count short out Count of packet
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.total_count _total_count;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_pocket_count(_Pwd, ref
_total_count);
if (ret == 0)
{
MessageBox.Show(_total_count.Count.ToString());
}
}
16. GET_pocket_data: Get the data of Tool Pocket
API Name GET_pocket_data
Description Get the data of Tool Pocket
C# Method short GET_pocket_data(StructMsg.Pwd P, ref
StructMsg.pocket_data R);
VB.Net
Method
GET_pocket_data(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.pocket_data) As Short
Data
Structure
Structure name: pocket_data
Variable
names
Type [in/out] Description
Data string[][] out Data of Pocket
Note ※ As for the second array of Data, please refer to the title.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
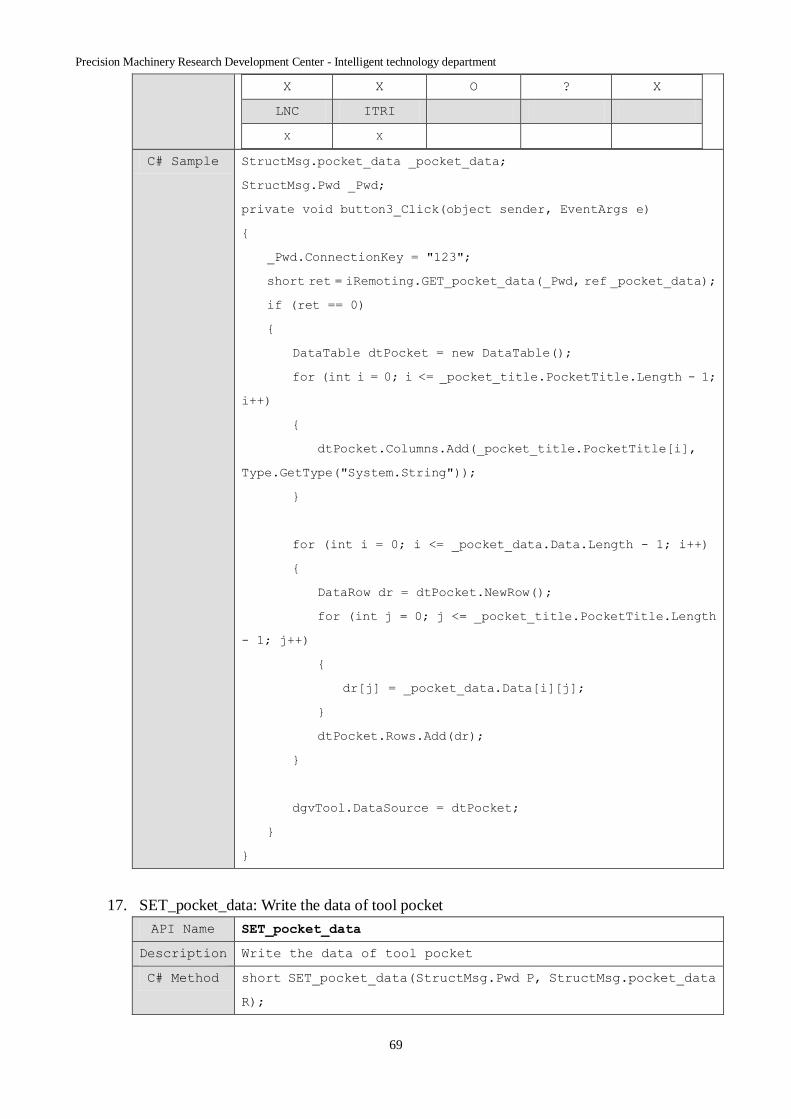
Precision Machinery Research Development Center - Intelligent technology department
69
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.pocket_data _pocket_data;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_pocket_data(_Pwd, ref _pocket_data);
if (ret == 0)
{
DataTable dtPocket = new DataTable();
for (int i = 0; i <= _pocket_title.PocketTitle.Length - 1;
i++)
{
dtPocket.Columns.Add(_pocket_title.PocketTitle[i],
Type.GetType("System.String"));
}
for (int i = 0; i <= _pocket_data.Data.Length - 1; i++)
{
DataRow dr = dtPocket.NewRow();
for (int j = 0; j <= _pocket_title.PocketTitle.Length
- 1; j++)
{
dr[j] = _pocket_data.Data[i][j];
}
dtPocket.Rows.Add(dr);
}
dgvTool.DataSource = dtPocket;
}
}
17. SET_pocket_data: Write the data of tool pocket
API Name SET_pocket_data
Description Write the data of tool pocket
C# Method short SET_pocket_data(StructMsg.Pwd P, StructMsg.pocket_data
R);
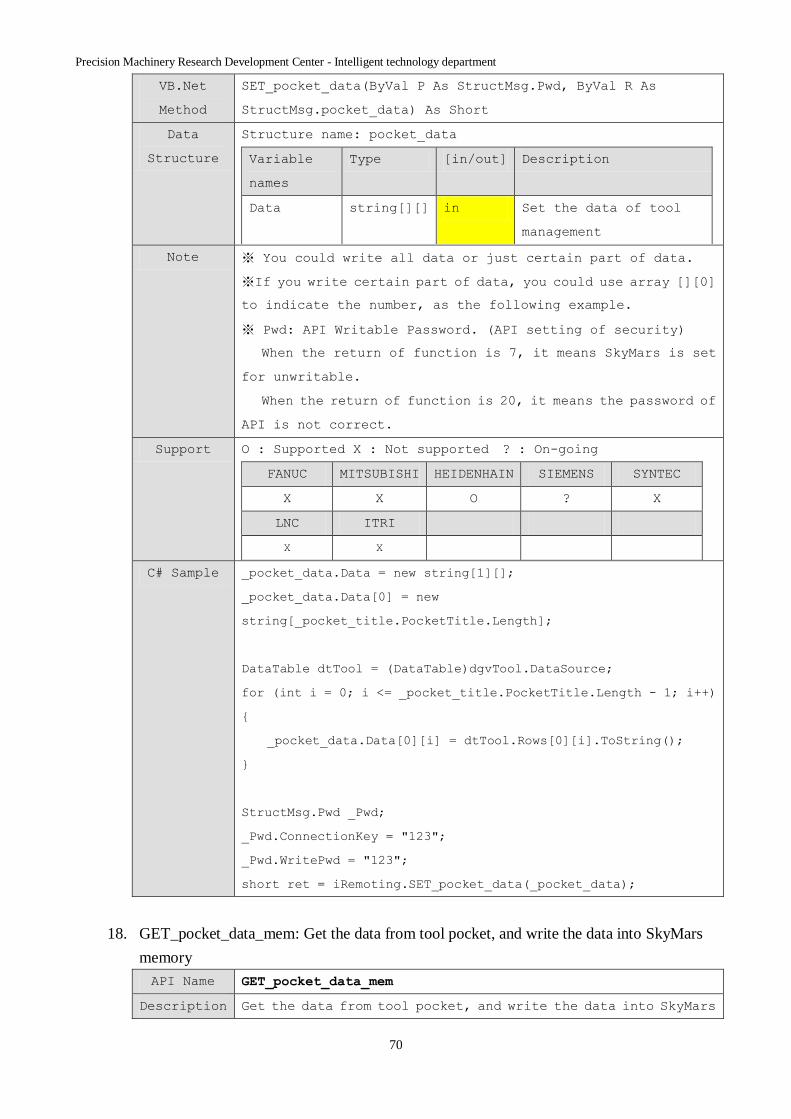
Precision Machinery Research Development Center - Intelligent technology department
70
VB.Net
Method
SET_pocket_data(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.pocket_data) As Short
Data
Structure
Structure name: pocket_data
Variable
names
Type [in/out] Description
Data string[][] in Set the data of tool
management
Note ※ You could write all data or just certain part of data.
※If you write certain part of data, you could use array [][0]
to indicate the number, as the following example.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample _pocket_data.Data = new string[1][];
_pocket_data.Data[0] = new
string[_pocket_title.PocketTitle.Length];
DataTable dtTool = (DataTable)dgvTool.DataSource;
for (int i = 0; i <= _pocket_title.PocketTitle.Length - 1; i++)
{
_pocket_data.Data[0][i] = dtTool.Rows[0][i].ToString();
}
StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
_Pwd.WritePwd = "123";
short ret = iRemoting.SET_pocket_data(_pocket_data);
18. GET_pocket_data_mem: Get the data from tool pocket, and write the data into SkyMars
memory
API Name GET_pocket_data_mem
Description Get the data from tool pocket, and write the data into SkyMars
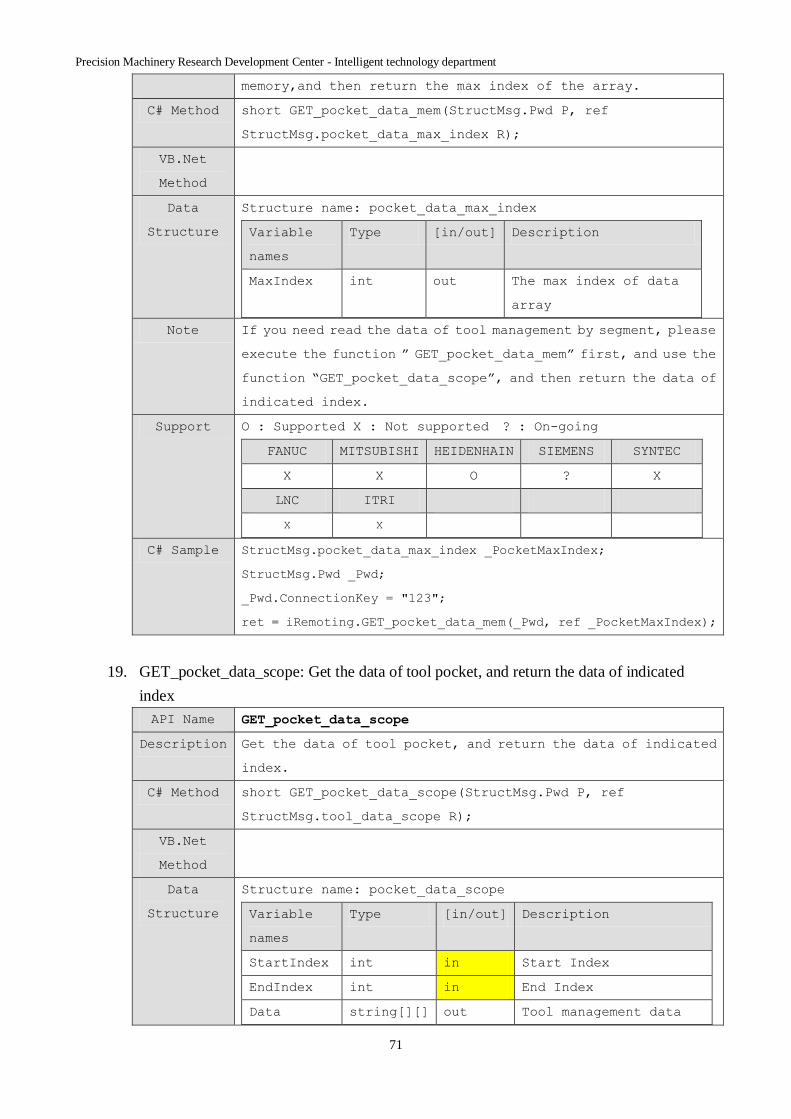
Precision Machinery Research Development Center - Intelligent technology department
71
memory,and then return the max index of the array.
C# Method short GET_pocket_data_mem(StructMsg.Pwd P, ref
StructMsg.pocket_data_max_index R);
VB.Net
Method
Data
Structure
Structure name: pocket_data_max_index
Variable
names
Type [in/out] Description
MaxIndex int out The max index of data
array
Note If you need read the data of tool management by segment, please
execute the function ” GET_pocket_data_mem” first, and use the
function “GET_pocket_data_scope”, and then return the data of
indicated index.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.pocket_data_max_index _PocketMaxIndex;
StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
ret = iRemoting.GET_pocket_data_mem(_Pwd, ref _PocketMaxIndex);
19. GET_pocket_data_scope: Get the data of tool pocket, and return the data of indicated
index
API Name GET_pocket_data_scope
Description Get the data of tool pocket, and return the data of indicated
index.
C# Method short GET_pocket_data_scope(StructMsg.Pwd P, ref
StructMsg.tool_data_scope R);
VB.Net
Method
Data
Structure
Structure name: pocket_data_scope
Variable
names
Type [in/out] Description
StartIndex int in Start Index
EndIndex int in End Index
Data string[][] out Tool management data
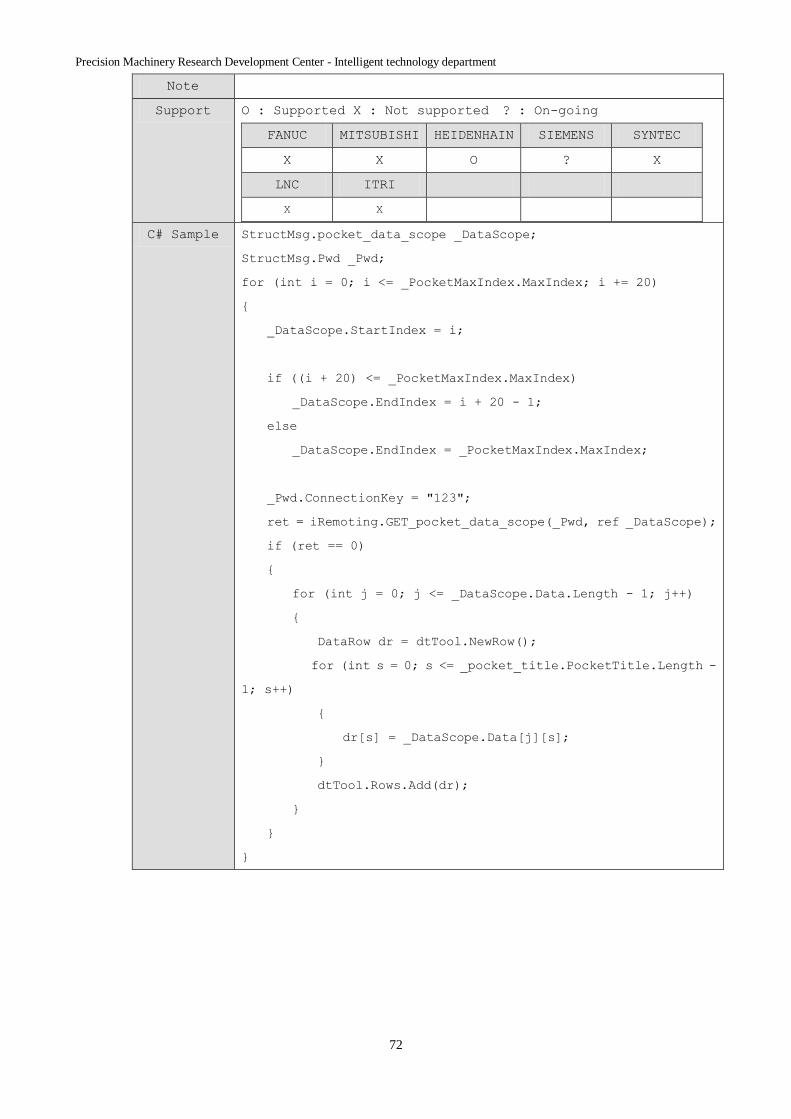
Precision Machinery Research Development Center - Intelligent technology department
72
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.pocket_data_scope _DataScope;
StructMsg.Pwd _Pwd;
for (int i = 0; i <= _PocketMaxIndex.MaxIndex; i += 20)
{
_DataScope.StartIndex = i;
if ((i + 20) <= _PocketMaxIndex.MaxIndex)
_DataScope.EndIndex = i + 20 - 1;
else
_DataScope.EndIndex = _PocketMaxIndex.MaxIndex;
_Pwd.ConnectionKey = "123";
ret = iRemoting.GET_pocket_data_scope(_Pwd, ref _DataScope);
if (ret == 0)
{
for (int j = 0; j <= _DataScope.Data.Length - 1; j++)
{
DataRow dr = dtTool.NewRow();
for (int s = 0; s <= _pocket_title.PocketTitle.Length -
1; s++)
{
dr[s] = _DataScope.Data[j][s];
}
dtTool.Rows.Add(dr);
}
}
}
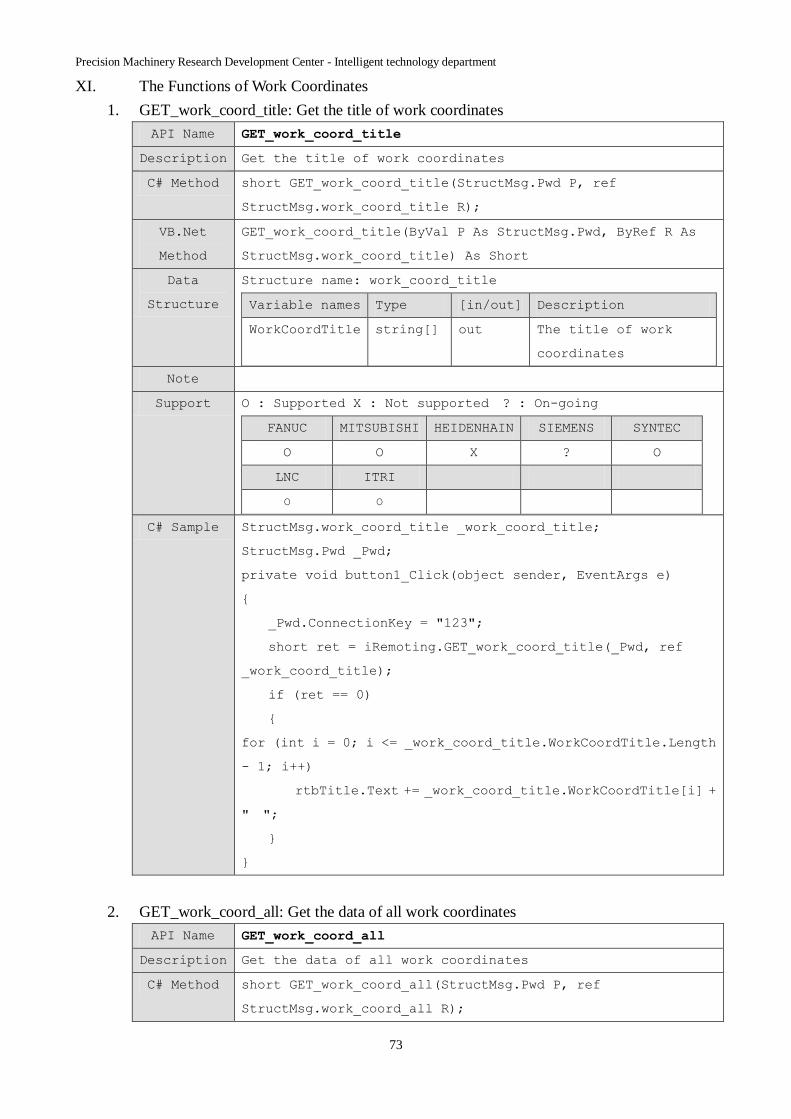
Precision Machinery Research Development Center - Intelligent technology department
73
XI. The Functions of Work Coordinates
1. GET_work_coord_title: Get the title of work coordinates
API Name GET_work_coord_title
Description Get the title of work coordinates
C# Method short GET_work_coord_title(StructMsg.Pwd P, ref
StructMsg.work_coord_title R);
VB.Net
Method
GET_work_coord_title(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.work_coord_title) As Short
Data
Structure
Structure name: work_coord_title
Variable names Type [in/out] Description
WorkCoordTitle string[] out The title of work
coordinates
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_title _work_coord_title;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_title(_Pwd, ref
_work_coord_title);
if (ret == 0)
{
for (int i = 0; i <= _work_coord_title.WorkCoordTitle.Length
- 1; i++)
rtbTitle.Text += _work_coord_title.WorkCoordTitle[i] +
" ";
}
}
2. GET_work_coord_all: Get the data of all work coordinates
API Name GET_work_coord_all
Description Get the data of all work coordinates
C# Method short GET_work_coord_all(StructMsg.Pwd P, ref
StructMsg.work_coord_all R);

Precision Machinery Research Development Center - Intelligent technology department
74
VB.Net
Method
GET_work_coord_all(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.work_coord_all) As Short
Data
Structure
Structure name: work_coord_all
Variable
names
Type [in/out] Description
CoordName string[] out items, ex:EXT,G54,G55…
WorkCoord double[][] out The data of work
coordinates
Note The items of CoordName are as below:
Such as EXT, G54, G55, G56, G57, G58, G59 , G54.1P1, G54.1P2,
G54.1P3…etc.
Using this function may spend lots of time reading data.
(Generally, it usually happens on a low-speed internet adapter.)
Please use “GET_offset_scope” to read by segment.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_all _work_coord_all;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_all(_Pwd, ref
_work_coord_all);
if (ret == 0)
{
//EXT Work Coord
txtItem.Text = _work_coord_all.CoordName[0];
txtX.Text =
_work_coord_all.WorkCoord[0][0].ToString();
txtY.Text =
_work_coord_all.WorkCoord[0][1].ToString();
txtZ.Text =
_work_coord_all.WorkCoord[0][2].ToString();
}
}
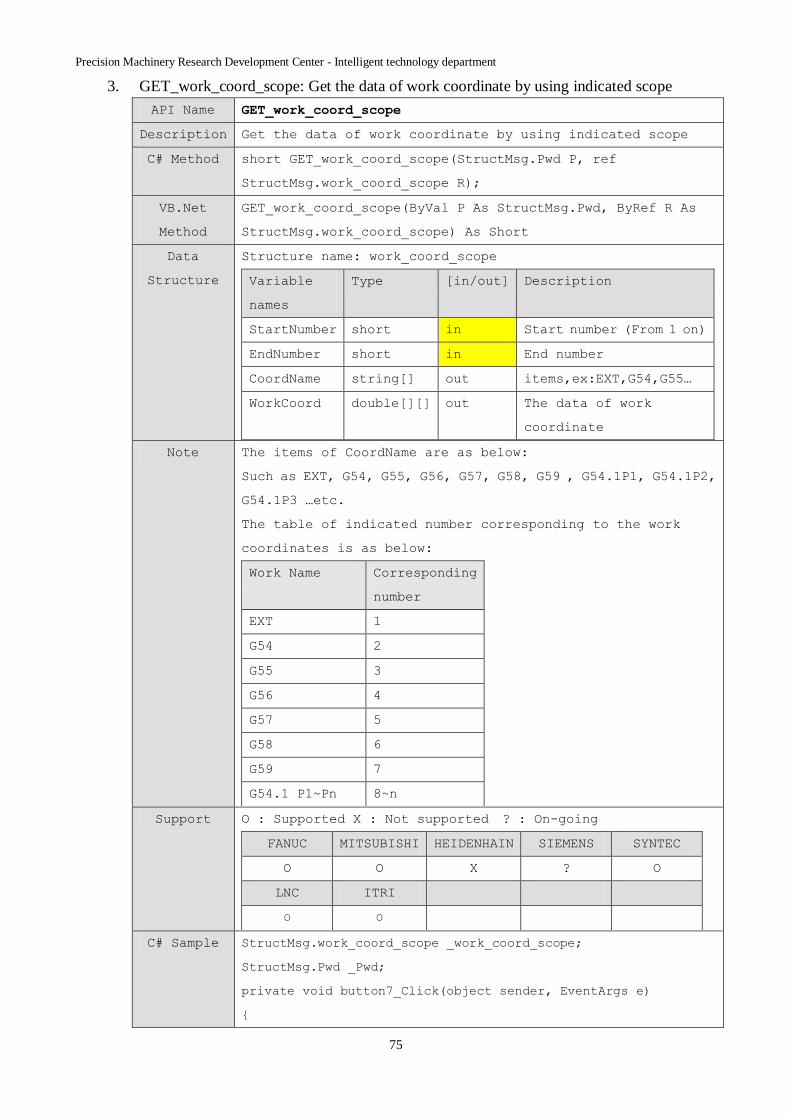
Precision Machinery Research Development Center - Intelligent technology department
75
3. GET_work_coord_scope: Get the data of work coordinate by using indicated scope
API Name GET_work_coord_scope
Description Get the data of work coordinate by using indicated scope
C# Method short GET_work_coord_scope(StructMsg.Pwd P, ref
StructMsg.work_coord_scope R);
VB.Net
Method
GET_work_coord_scope(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.work_coord_scope) As Short
Data
Structure
Structure name: work_coord_scope
Variable
names
Type [in/out] Description
StartNumber short in Start number (From 1 on)
EndNumber short in End number
CoordName string[] out items,ex:EXT,G54,G55…
WorkCoord double[][] out The data of work
coordinate
Note The items of CoordName are as below:
Such as EXT, G54, G55, G56, G57, G58, G59 , G54.1P1, G54.1P2,
G54.1P3 …etc.
The table of indicated number corresponding to the work
coordinates is as below:
Work Name Corresponding
number
EXT 1
G54 2
G55 3
G56 4
G57 5
G58 6
G59 7
G54.1 P1~Pn 8~n
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_scope _work_coord_scope;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
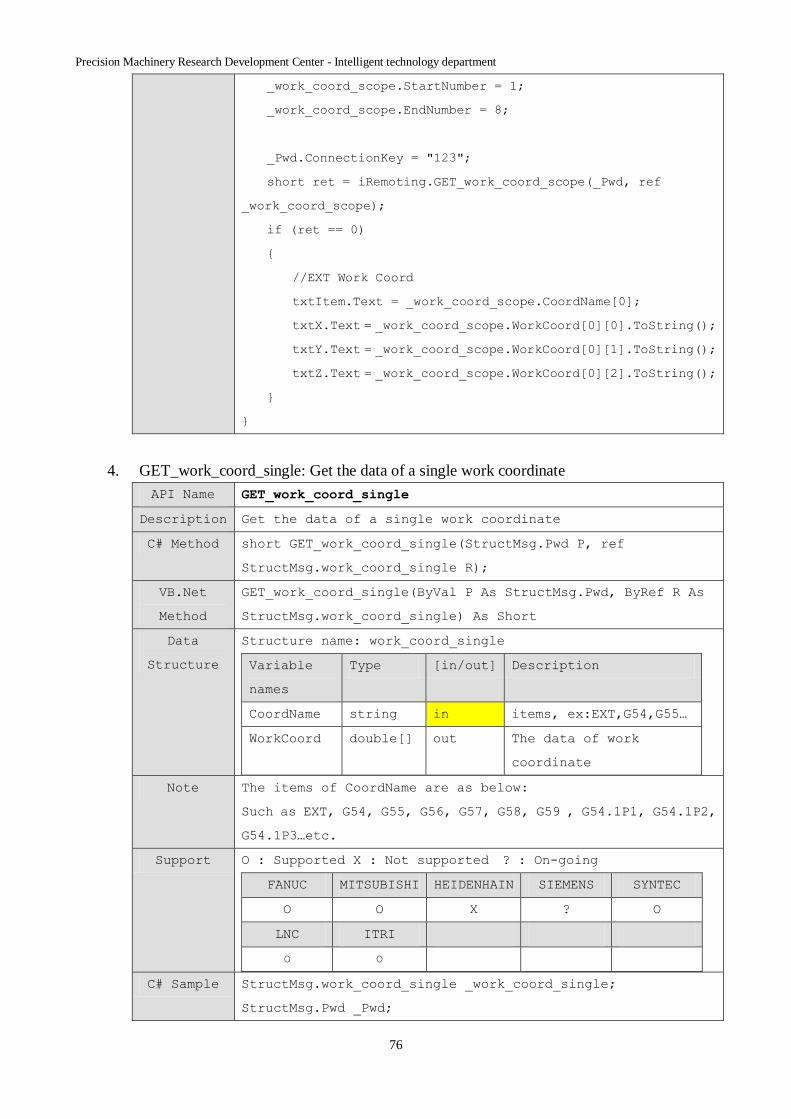
Precision Machinery Research Development Center - Intelligent technology department
76
_work_coord_scope.StartNumber = 1;
_work_coord_scope.EndNumber = 8;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_scope(_Pwd, ref
_work_coord_scope);
if (ret == 0)
{
//EXT Work Coord
txtItem.Text = _work_coord_scope.CoordName[0];
txtX.Text = _work_coord_scope.WorkCoord[0][0].ToString();
txtY.Text = _work_coord_scope.WorkCoord[0][1].ToString();
txtZ.Text = _work_coord_scope.WorkCoord[0][2].ToString();
}
}
4. GET_work_coord_single: Get the data of a single work coordinate
API Name GET_work_coord_single
Description Get the data of a single work coordinate
C# Method short GET_work_coord_single(StructMsg.Pwd P, ref
StructMsg.work_coord_single R);
VB.Net
Method
GET_work_coord_single(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.work_coord_single) As Short
Data
Structure
Structure name: work_coord_single
Variable
names
Type [in/out] Description
CoordName string in items, ex:EXT,G54,G55…
WorkCoord double[] out The data of work
coordinate
Note The items of CoordName are as below:
Such as EXT, G54, G55, G56, G57, G58, G59 , G54.1P1, G54.1P2,
G54.1P3…etc.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_single _work_coord_single;
StructMsg.Pwd _Pwd;
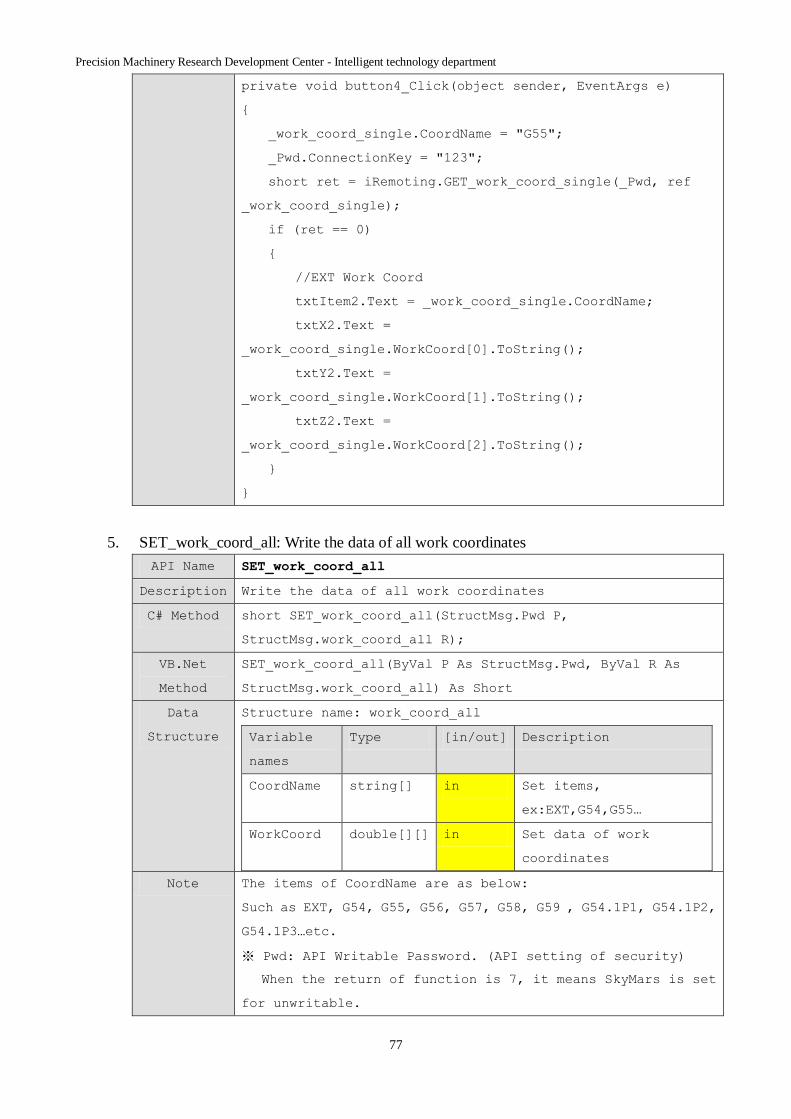
Precision Machinery Research Development Center - Intelligent technology department
77
private void button4_Click(object sender, EventArgs e)
{
_work_coord_single.CoordName = "G55";
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_single(_Pwd, ref
_work_coord_single);
if (ret == 0)
{
//EXT Work Coord
txtItem2.Text = _work_coord_single.CoordName;
txtX2.Text =
_work_coord_single.WorkCoord[0].ToString();
txtY2.Text =
_work_coord_single.WorkCoord[1].ToString();
txtZ2.Text =
_work_coord_single.WorkCoord[2].ToString();
}
}
5. SET_work_coord_all: Write the data of all work coordinates
API Name SET_work_coord_all
Description Write the data of all work coordinates
C# Method short SET_work_coord_all(StructMsg.Pwd P,
StructMsg.work_coord_all R);
VB.Net
Method
SET_work_coord_all(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.work_coord_all) As Short
Data
Structure
Structure name: work_coord_all
Variable
names
Type [in/out] Description
CoordName string[] in Set items,
ex:EXT,G54,G55…
WorkCoord double[][] in Set data of work
coordinates
Note The items of CoordName are as below:
Such as EXT, G54, G55, G56, G57, G58, G59 , G54.1P1, G54.1P2,
G54.1P3…etc.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
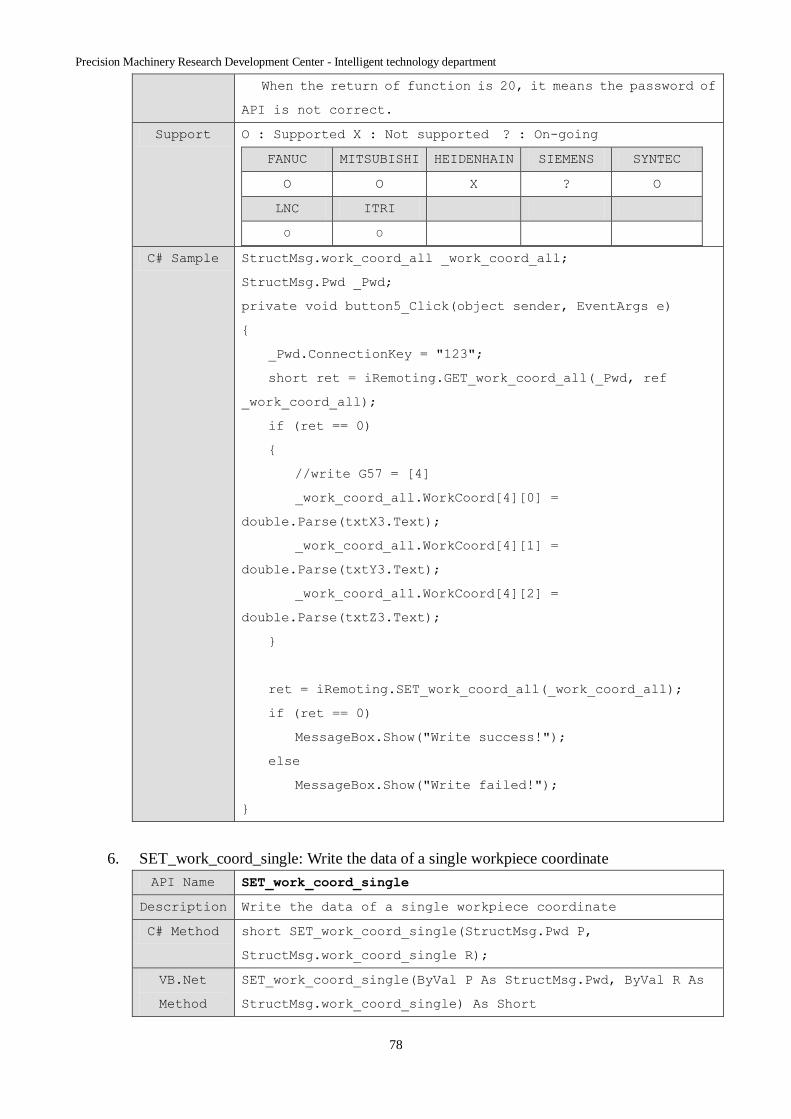
Precision Machinery Research Development Center - Intelligent technology department
78
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_all _work_coord_all;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_all(_Pwd, ref
_work_coord_all);
if (ret == 0)
{
//write G57 = [4]
_work_coord_all.WorkCoord[4][0] =
double.Parse(txtX3.Text);
_work_coord_all.WorkCoord[4][1] =
double.Parse(txtY3.Text);
_work_coord_all.WorkCoord[4][2] =
double.Parse(txtZ3.Text);
}
ret = iRemoting.SET_work_coord_all(_work_coord_all);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed!");
}
6. SET_work_coord_single: Write the data of a single workpiece coordinate
API Name SET_work_coord_single
Description Write the data of a single workpiece coordinate
C# Method short SET_work_coord_single(StructMsg.Pwd P,
StructMsg.work_coord_single R);
VB.Net
Method
SET_work_coord_single(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.work_coord_single) As Short
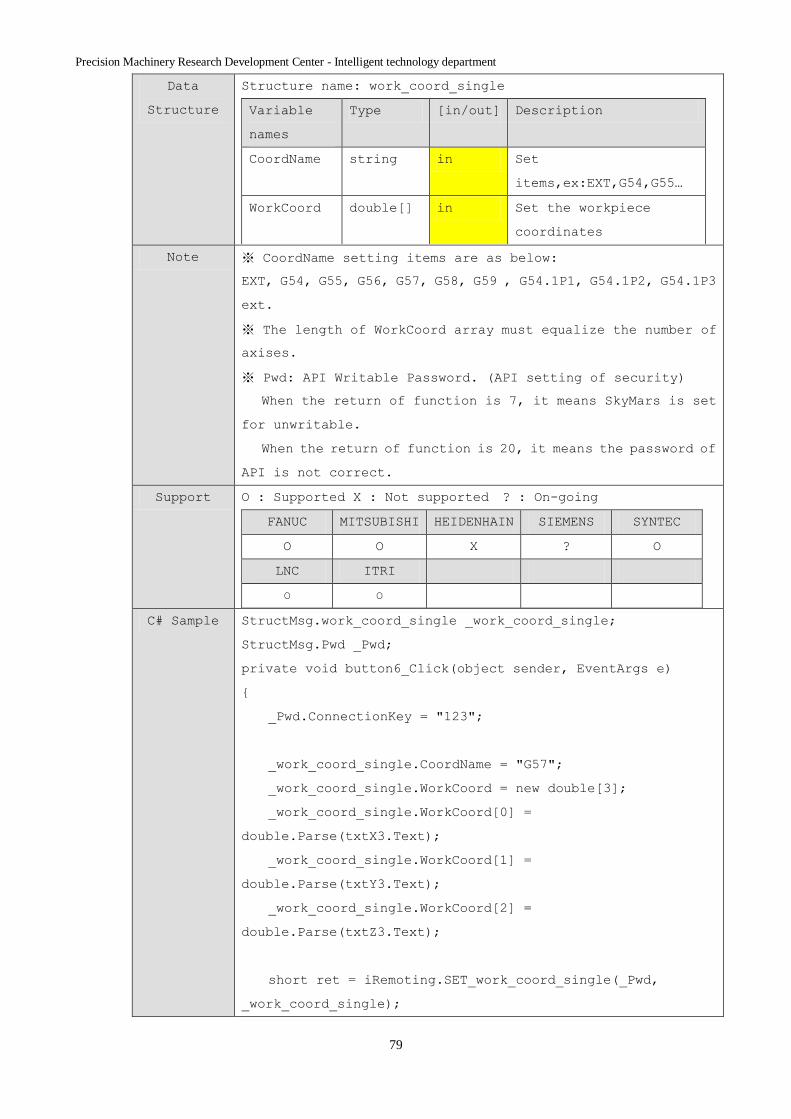
Precision Machinery Research Development Center - Intelligent technology department
79
Data
Structure
Structure name: work_coord_single
Variable
names
Type [in/out] Description
CoordName string in Set
items,ex:EXT,G54,G55…
WorkCoord double[] in Set the workpiece
coordinates
Note ※ CoordName setting items are as below:
EXT, G54, G55, G56, G57, G58, G59 , G54.1P1, G54.1P2, G54.1P3
ext.
※ The length of WorkCoord array must equalize the number of
axises.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.work_coord_single _work_coord_single;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_work_coord_single.CoordName = "G57";
_work_coord_single.WorkCoord = new double[3];
_work_coord_single.WorkCoord[0] =
double.Parse(txtX3.Text);
_work_coord_single.WorkCoord[1] =
double.Parse(txtY3.Text);
_work_coord_single.WorkCoord[2] =
double.Parse(txtZ3.Text);
short ret = iRemoting.SET_work_coord_single(_Pwd,
_work_coord_single);
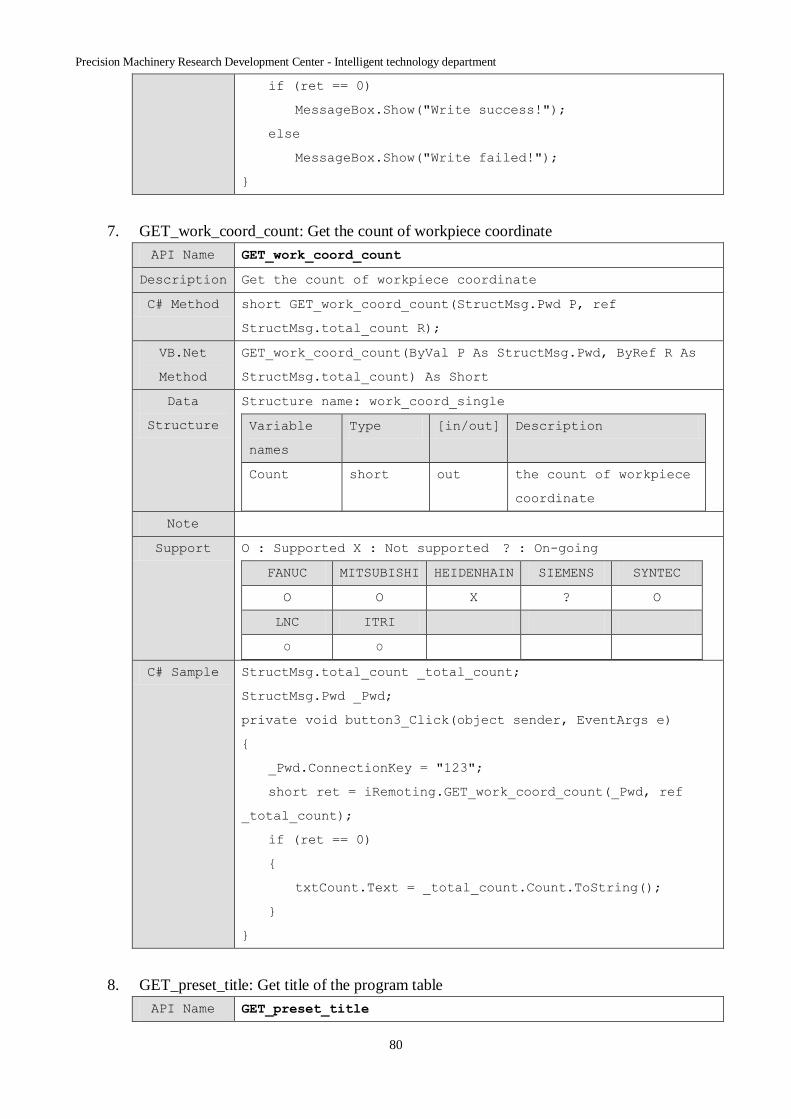
Precision Machinery Research Development Center - Intelligent technology department
80
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed!");
}
7. GET_work_coord_count: Get the count of workpiece coordinate
API Name GET_work_coord_count
Description Get the count of workpiece coordinate
C# Method short GET_work_coord_count(StructMsg.Pwd P, ref
StructMsg.total_count R);
VB.Net
Method
GET_work_coord_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.total_count) As Short
Data
Structure
Structure name: work_coord_single
Variable
names
Type [in/out] Description
Count short out the count of workpiece
coordinate
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.total_count _total_count;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_work_coord_count(_Pwd, ref
_total_count);
if (ret == 0)
{
txtCount.Text = _total_count.Count.ToString();
}
}
8. GET_preset_title: Get title of the program table
API Name GET_preset_title
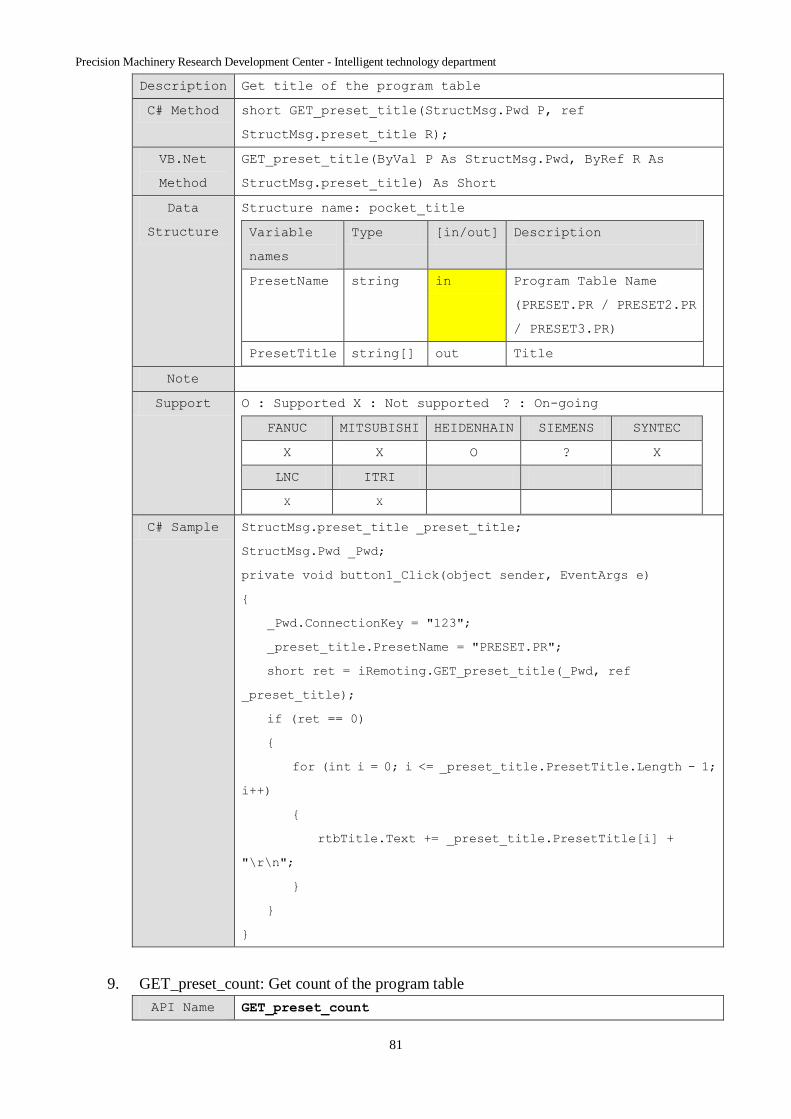
Precision Machinery Research Development Center - Intelligent technology department
81
Description Get title of the program table
C# Method short GET_preset_title(StructMsg.Pwd P, ref
StructMsg.preset_title R);
VB.Net
Method
GET_preset_title(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.preset_title) As Short
Data
Structure
Structure name: pocket_title
Variable
names
Type [in/out] Description
PresetName string in Program Table Name
(PRESET.PR / PRESET2.PR
/ PRESET3.PR)
PresetTitle string[] out Title
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.preset_title _preset_title;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_preset_title.PresetName = "PRESET.PR";
short ret = iRemoting.GET_preset_title(_Pwd, ref
_preset_title);
if (ret == 0)
{
for (int i = 0; i <= _preset_title.PresetTitle.Length - 1;
i++)
{
rtbTitle.Text += _preset_title.PresetTitle[i] +
"\r\n";
}
}
}
9. GET_preset_count: Get count of the program table
API Name GET_preset_count
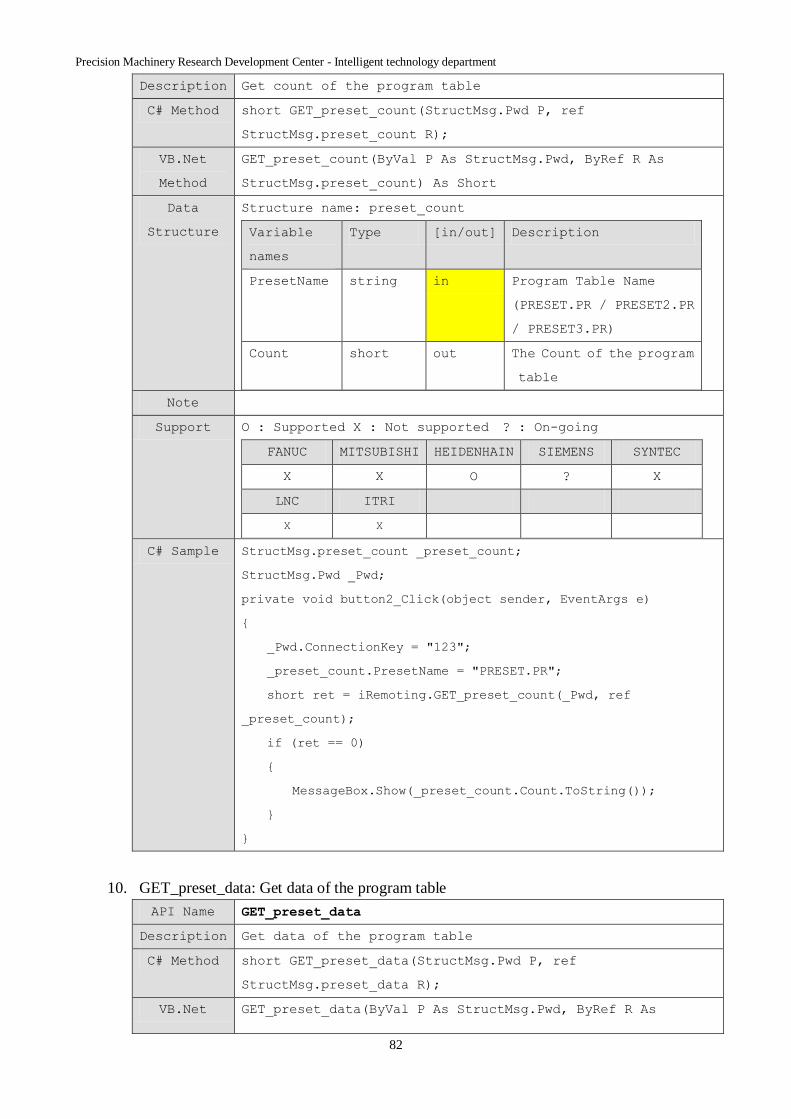
Precision Machinery Research Development Center - Intelligent technology department
82
Description Get count of the program table
C# Method short GET_preset_count(StructMsg.Pwd P, ref
StructMsg.preset_count R);
VB.Net
Method
GET_preset_count(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.preset_count) As Short
Data
Structure
Structure name: preset_count
Variable
names
Type [in/out] Description
PresetName string in Program Table Name
(PRESET.PR / PRESET2.PR
/ PRESET3.PR)
Count short out The Count of the program
table
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.preset_count _preset_count;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_preset_count.PresetName = "PRESET.PR";
short ret = iRemoting.GET_preset_count(_Pwd, ref
_preset_count);
if (ret == 0)
{
MessageBox.Show(_preset_count.Count.ToString());
}
}
10. GET_preset_data: Get data of the program table
API Name GET_preset_data
Description Get data of the program table
C# Method short GET_preset_data(StructMsg.Pwd P, ref
StructMsg.preset_data R);
VB.Net GET_preset_data(ByVal P As StructMsg.Pwd, ByRef R As
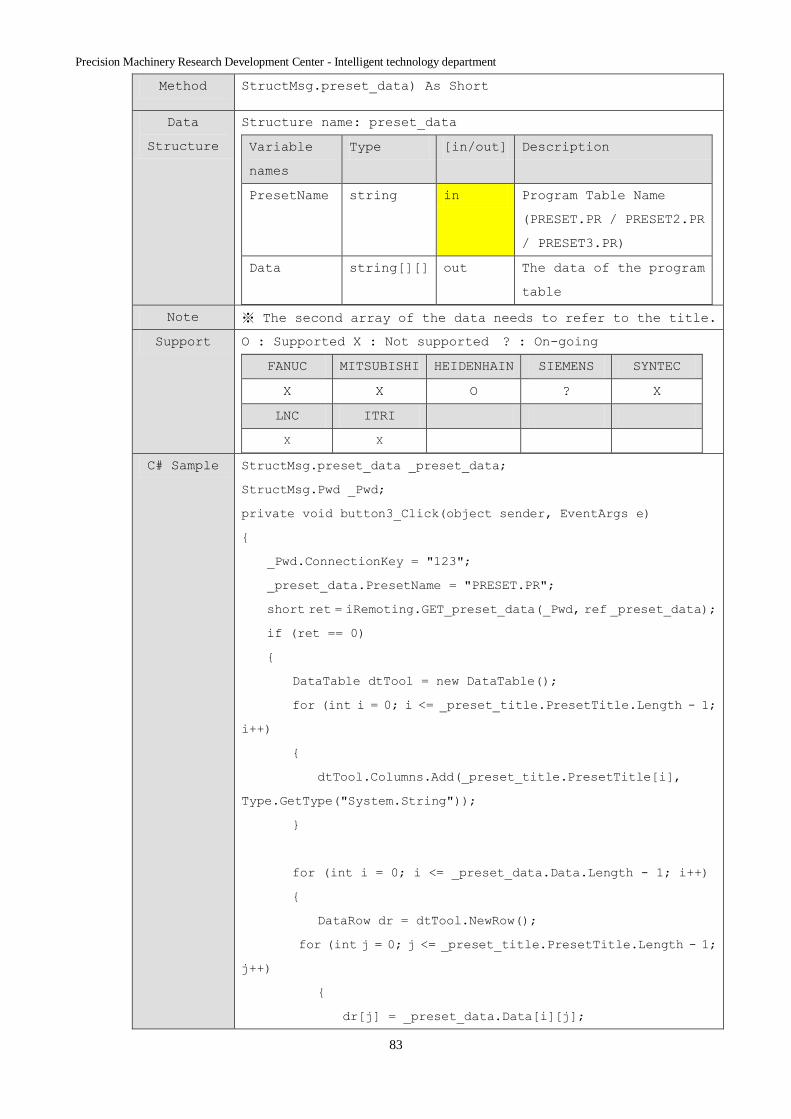
Precision Machinery Research Development Center - Intelligent technology department
83
Method StructMsg.preset_data) As Short
Data
Structure
Structure name: preset_data
Variable
names
Type [in/out] Description
PresetName string in Program Table Name
(PRESET.PR / PRESET2.PR
/ PRESET3.PR)
Data string[][] out The data of the program
table
Note ※ The second array of the data needs to refer to the title.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.preset_data _preset_data;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_preset_data.PresetName = "PRESET.PR";
short ret = iRemoting.GET_preset_data(_Pwd, ref _preset_data);
if (ret == 0)
{
DataTable dtTool = new DataTable();
for (int i = 0; i <= _preset_title.PresetTitle.Length - 1;
i++)
{
dtTool.Columns.Add(_preset_title.PresetTitle[i],
Type.GetType("System.String"));
}
for (int i = 0; i <= _preset_data.Data.Length - 1; i++)
{
DataRow dr = dtTool.NewRow();
for (int j = 0; j <= _preset_title.PresetTitle.Length - 1;
j++)
{
dr[j] = _preset_data.Data[i][j];
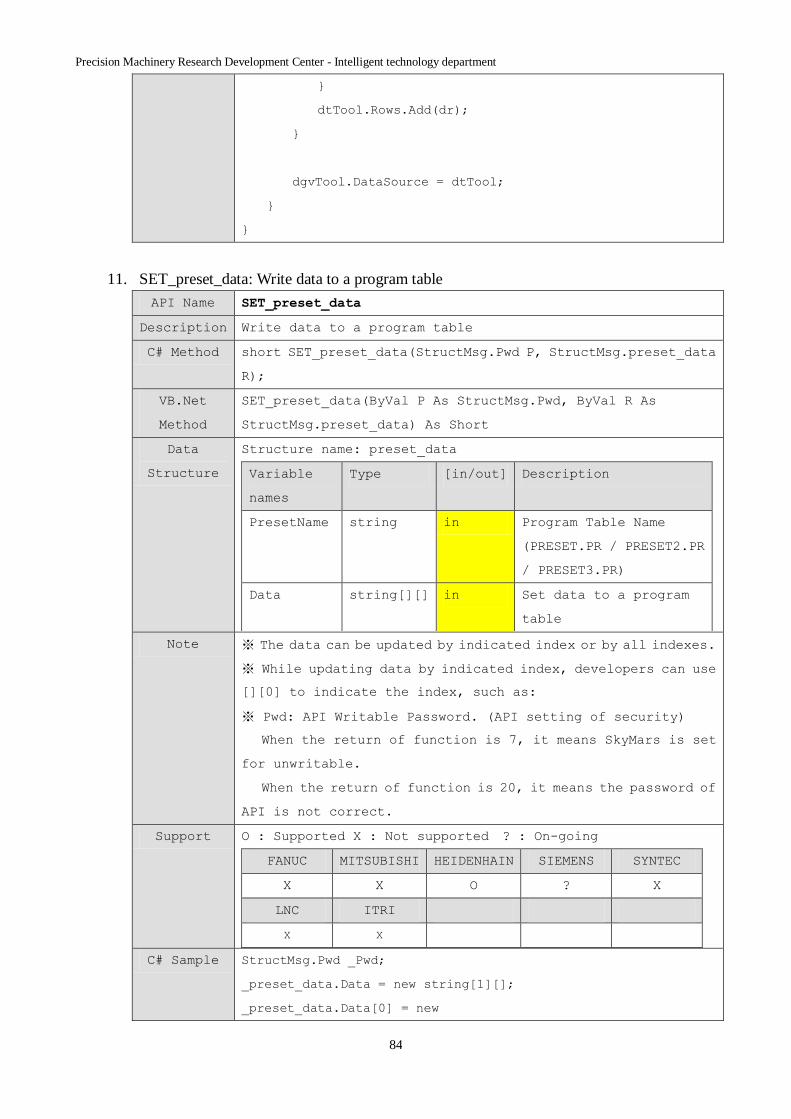
Precision Machinery Research Development Center - Intelligent technology department
84
}
dtTool.Rows.Add(dr);
}
dgvTool.DataSource = dtTool;
}
}
11. SET_preset_data: Write data to a program table
API Name SET_preset_data
Description Write data to a program table
C# Method short SET_preset_data(StructMsg.Pwd P, StructMsg.preset_data
R);
VB.Net
Method
SET_preset_data(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.preset_data) As Short
Data
Structure
Structure name: preset_data
Variable
names
Type [in/out] Description
PresetName string in Program Table Name
(PRESET.PR / PRESET2.PR
/ PRESET3.PR)
Data string[][] in Set data to a program
table
Note ※ The data can be updated by indicated index or by all indexes.
※ While updating data by indicated index, developers can use
[][0] to indicate the index, such as:
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.Pwd _Pwd;
_preset_data.Data = new string[1][];
_preset_data.Data[0] = new
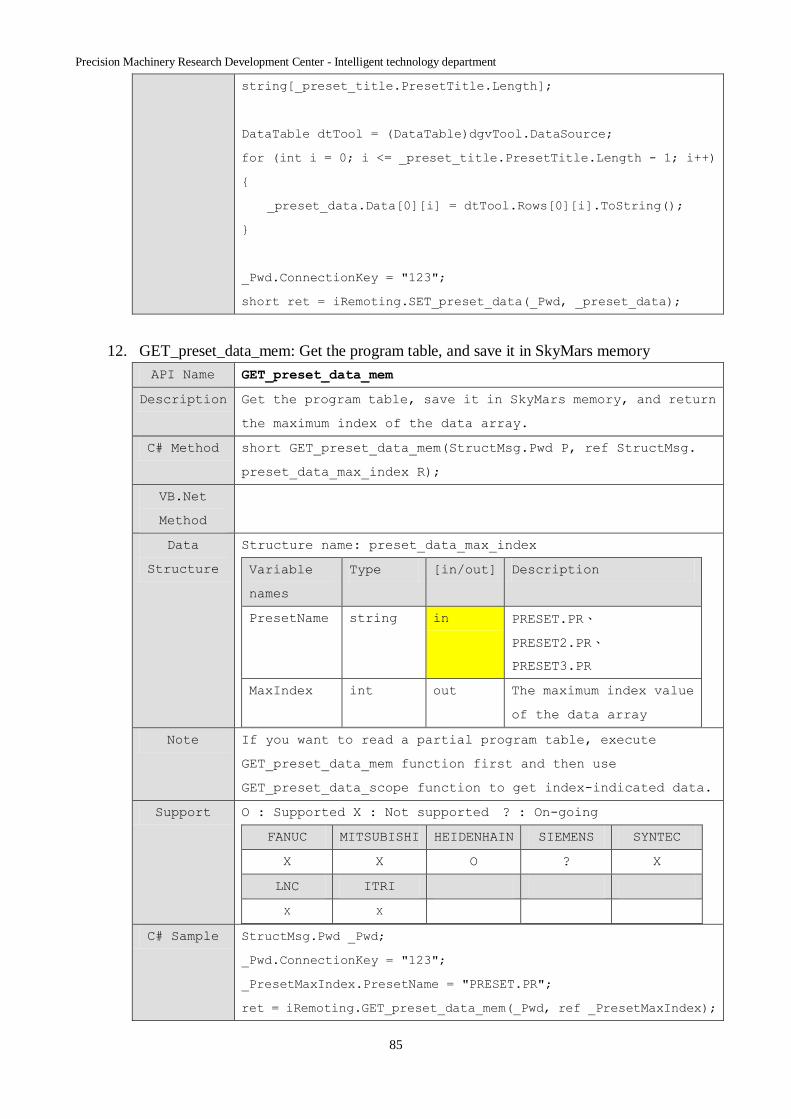
Precision Machinery Research Development Center - Intelligent technology department
85
string[_preset_title.PresetTitle.Length];
DataTable dtTool = (DataTable)dgvTool.DataSource;
for (int i = 0; i <= _preset_title.PresetTitle.Length - 1; i++)
{
_preset_data.Data[0][i] = dtTool.Rows[0][i].ToString();
}
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SET_preset_data(_Pwd, _preset_data);
12. GET_preset_data_mem: Get the program table, and save it in SkyMars memory
API Name GET_preset_data_mem
Description Get the program table, save it in SkyMars memory, and return
the maximum index of the data array.
C# Method short GET_preset_data_mem(StructMsg.Pwd P, ref StructMsg.
preset_data_max_index R);
VB.Net
Method
Data
Structure
Structure name: preset_data_max_index
Variable
names
Type [in/out] Description
PresetName string in PRESET.PR、
PRESET2.PR、
PRESET3.PR
MaxIndex int out The maximum index value
of the data array
Note If you want to read a partial program table, execute
GET_preset_data_mem function first and then use
GET_preset_data_scope function to get index-indicated data.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
_PresetMaxIndex.PresetName = "PRESET.PR";
ret = iRemoting.GET_preset_data_mem(_Pwd, ref _PresetMaxIndex);
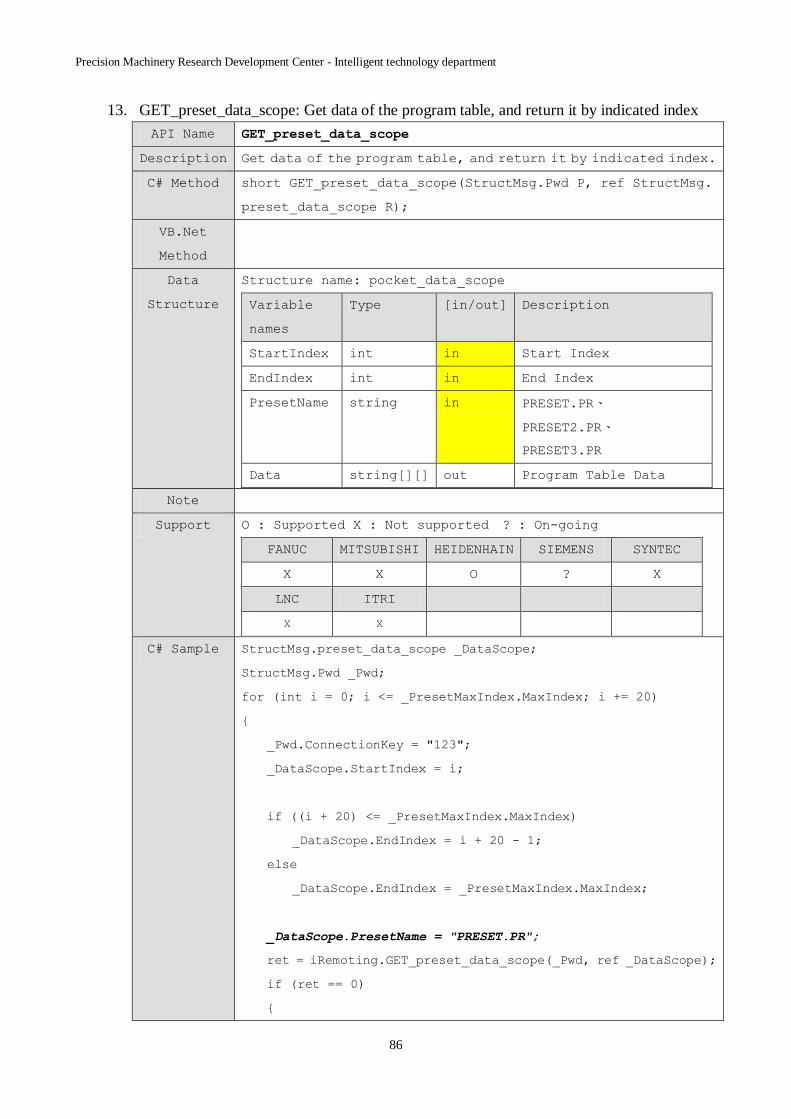
Precision Machinery Research Development Center - Intelligent technology department
86
13. GET_preset_data_scope: Get data of the program table, and return it by indicated index
API Name GET_preset_data_scope
Description Get data of the program table, and return it by indicated index.
C# Method short GET_preset_data_scope(StructMsg.Pwd P, ref StructMsg.
preset_data_scope R);
VB.Net
Method
Data
Structure
Structure name: pocket_data_scope
Variable
names
Type [in/out] Description
StartIndex int in Start Index
EndIndex int in End Index
PresetName string in PRESET.PR、
PRESET2.PR、
PRESET3.PR
Data string[][] out Program Table Data
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
X X O ? X
LNC ITRI
X X
C# Sample StructMsg.preset_data_scope _DataScope;
StructMsg.Pwd _Pwd;
for (int i = 0; i <= _PresetMaxIndex.MaxIndex; i += 20)
{
_Pwd.ConnectionKey = "123";
_DataScope.StartIndex = i;
if ((i + 20) <= _PresetMaxIndex.MaxIndex)
_DataScope.EndIndex = i + 20 - 1;
else
_DataScope.EndIndex = _PresetMaxIndex.MaxIndex;
_DataScope.PresetName = "PRESET.PR";
ret = iRemoting.GET_preset_data_scope(_Pwd, ref _DataScope);
if (ret == 0)
{

Precision Machinery Research Development Center - Intelligent technology department
87
for (int j = 0; j <= _DataScope.Data.Length - 1; j++)
{
DataRow dr = dtTool.NewRow();
for (int s = 0; s <= _preset_title.PresetTitle.Length -
1; s++)
{
dr[s] = _DataScope.Data[j][s];
}
dtTool.Rows.Add(dr);
}
}
}
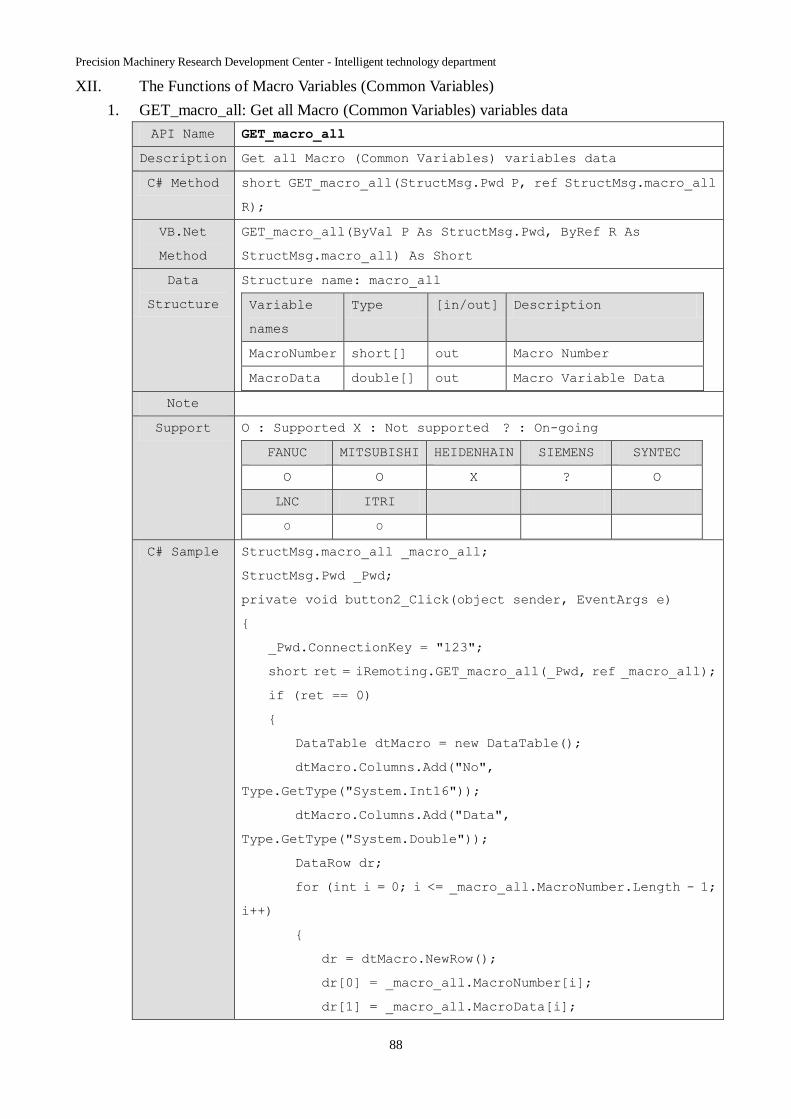
Precision Machinery Research Development Center - Intelligent technology department
88
XII. The Functions of Macro Variables (Common Variables)
1. GET_macro_all: Get all Macro (Common Variables) variables data
API Name GET_macro_all
Description Get all Macro (Common Variables) variables data
C# Method short GET_macro_all(StructMsg.Pwd P, ref StructMsg.macro_all
R);
VB.Net
Method
GET_macro_all(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.macro_all) As Short
Data
Structure
Structure name: macro_all
Variable
names
Type [in/out] Description
MacroNumber short[] out Macro Number
MacroData double[] out Macro Variable Data
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.macro_all _macro_all;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_macro_all(_Pwd, ref _macro_all);
if (ret == 0)
{
DataTable dtMacro = new DataTable();
dtMacro.Columns.Add("No",
Type.GetType("System.Int16"));
dtMacro.Columns.Add("Data",
Type.GetType("System.Double"));
DataRow dr;
for (int i = 0; i <= _macro_all.MacroNumber.Length - 1;
i++)
{
dr = dtMacro.NewRow();
dr[0] = _macro_all.MacroNumber[i];
dr[1] = _macro_all.MacroData[i];

Precision Machinery Research Development Center - Intelligent technology department
89
dtMacro.Rows.Add(dr);
}
dataGridView1.DataSource = dtMacro;
}
}
2. GET_macro_scope: Get Macro (Common Variable) variable data by scope indication
API Name GET_macro_scope
Description Get Macro(Common Variable) variable data by scope indication
C# Method short GET_macro_scope(StructMsg.Pwd P, ref
StructMsg.macro_scope R);
VB.Net
Method
GET_macro_scope(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.macro_scope) As Short
Data
Structure
Structure name: macro_scope
Variable
names
Type [in/out] Description
StartNumber short in Start Number (From 1)
EndNumber short in End Number
MacroNumber short[] out Macro Number
MacroData double[] out Macro Valuable Data
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.macro_scope _macro_scope;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_macro_scope.StartNumber = 513;
_macro_scope.EndNumber = 515;
short ret = iRemoting.GET_macro_scope(_Pwd, ref _macro_scope);
if (ret == 0)
{
DataTable dtMacro = new DataTable();
dtMacro.Columns.Add("No", Type.GetType("System.Int16"));
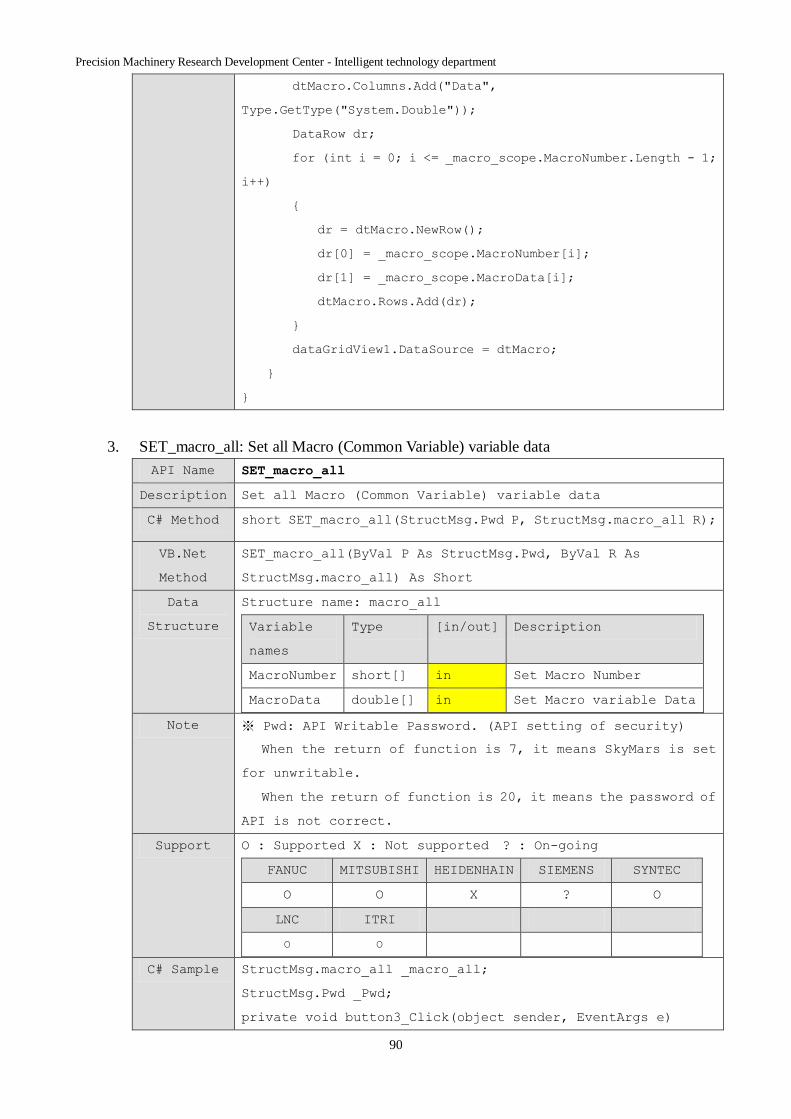
Precision Machinery Research Development Center - Intelligent technology department
90
dtMacro.Columns.Add("Data",
Type.GetType("System.Double"));
DataRow dr;
for (int i = 0; i <= _macro_scope.MacroNumber.Length - 1;
i++)
{
dr = dtMacro.NewRow();
dr[0] = _macro_scope.MacroNumber[i];
dr[1] = _macro_scope.MacroData[i];
dtMacro.Rows.Add(dr);
}
dataGridView1.DataSource = dtMacro;
}
}
3. SET_macro_all: Set all Macro (Common Variable) variable data
API Name SET_macro_all
Description Set all Macro (Common Variable) variable data
C# Method short SET_macro_all(StructMsg.Pwd P, StructMsg.macro_all R);
VB.Net
Method
SET_macro_all(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.macro_all) As Short
Data
Structure
Structure name: macro_all
Variable
names
Type [in/out] Description
MacroNumber short[] in Set Macro Number
MacroData double[] in Set Macro variable Data
Note ※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.macro_all _macro_all;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)

Precision Machinery Research Development Center - Intelligent technology department
91
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_macro_all(_Pwd, ref _macro_all);
if (ret == 0)
{
//Search no
for (int i = 0; i <= _macro_all.MacroNumber.Length - 1;
i++)
{
if (_macro_all.MacroNumber[i] ==
short.Parse(txtNo.Text))
{
_macro_all.MacroData[i] =
double.Parse(txtData.Text);
break;
}
}
}
ret = iRemoting.SET_macro_all(_macro_all);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
4. GET_macro_single: Get single Macro (Common Variable) variable data
API Name GET_macro_single
Description Get single Macro (Common Variable) variable data
C# Method short GET_macro_single(StructMsg.Pwd P, ref
StructMsg.macro_single R);
VB.Net
Method
GET_macro_single(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.macro_single) As Short
Data
Structure
Structure name: macro_single
Variable
names
Type [in/out] Description
MacroNumber short in Macro Number
MacroData double out Macro Variable Data
Note
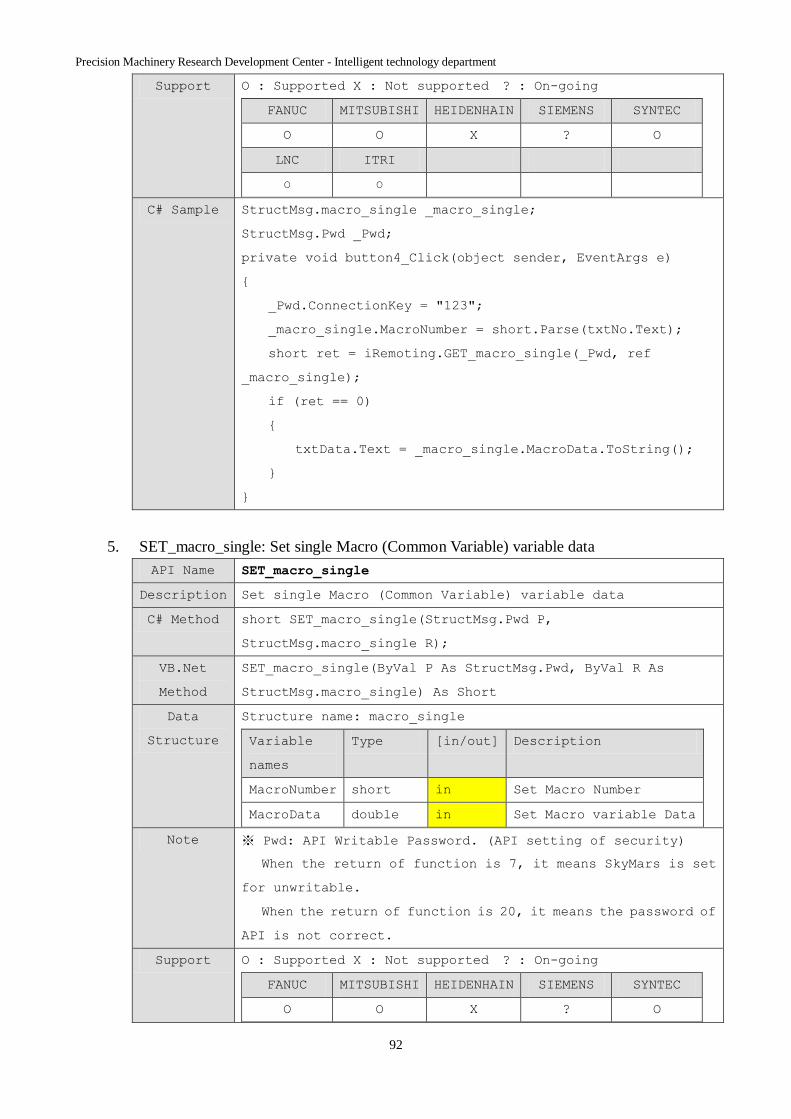
Precision Machinery Research Development Center - Intelligent technology department
92
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.macro_single _macro_single;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_macro_single.MacroNumber = short.Parse(txtNo.Text);
short ret = iRemoting.GET_macro_single(_Pwd, ref
_macro_single);
if (ret == 0)
{
txtData.Text = _macro_single.MacroData.ToString();
}
}
5. SET_macro_single: Set single Macro (Common Variable) variable data
API Name SET_macro_single
Description Set single Macro (Common Variable) variable data
C# Method short SET_macro_single(StructMsg.Pwd P,
StructMsg.macro_single R);
VB.Net
Method
SET_macro_single(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.macro_single) As Short
Data
Structure
Structure name: macro_single
Variable
names
Type [in/out] Description
MacroNumber short in Set Macro Number
MacroData double in Set Macro variable Data
Note ※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
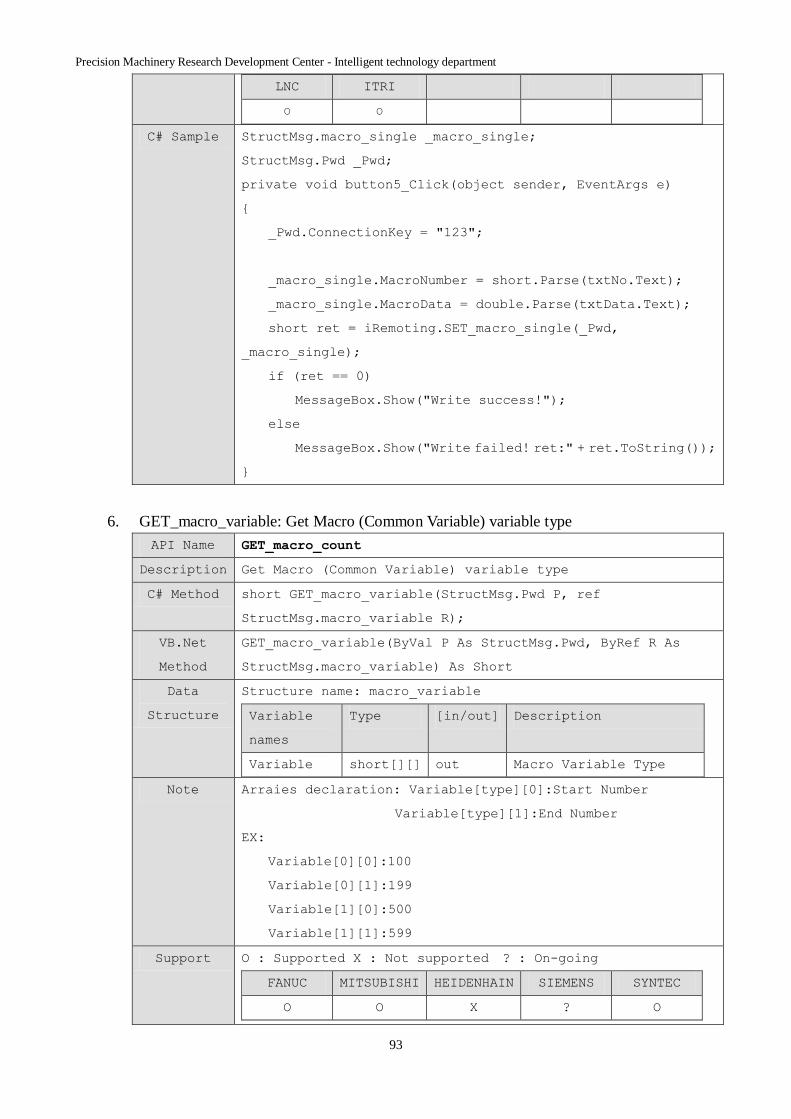
Precision Machinery Research Development Center - Intelligent technology department
93
LNC ITRI
O O
C# Sample StructMsg.macro_single _macro_single;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_macro_single.MacroNumber = short.Parse(txtNo.Text);
_macro_single.MacroData = double.Parse(txtData.Text);
short ret = iRemoting.SET_macro_single(_Pwd,
_macro_single);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
6. GET_macro_variable: Get Macro (Common Variable) variable type
API Name GET_macro_count
Description Get Macro (Common Variable) variable type
C# Method short GET_macro_variable(StructMsg.Pwd P, ref
StructMsg.macro_variable R);
VB.Net
Method
GET_macro_variable(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.macro_variable) As Short
Data
Structure
Structure name: macro_variable
Variable
names
Type [in/out] Description
Variable short[][] out Macro Variable Type
Note Arraies declaration: Variable[type][0]:Start Number
Variable[type][1]:End Number
EX:
Variable[0][0]:100
Variable[0][1]:199
Variable[1][0]:500
Variable[1][1]:599
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
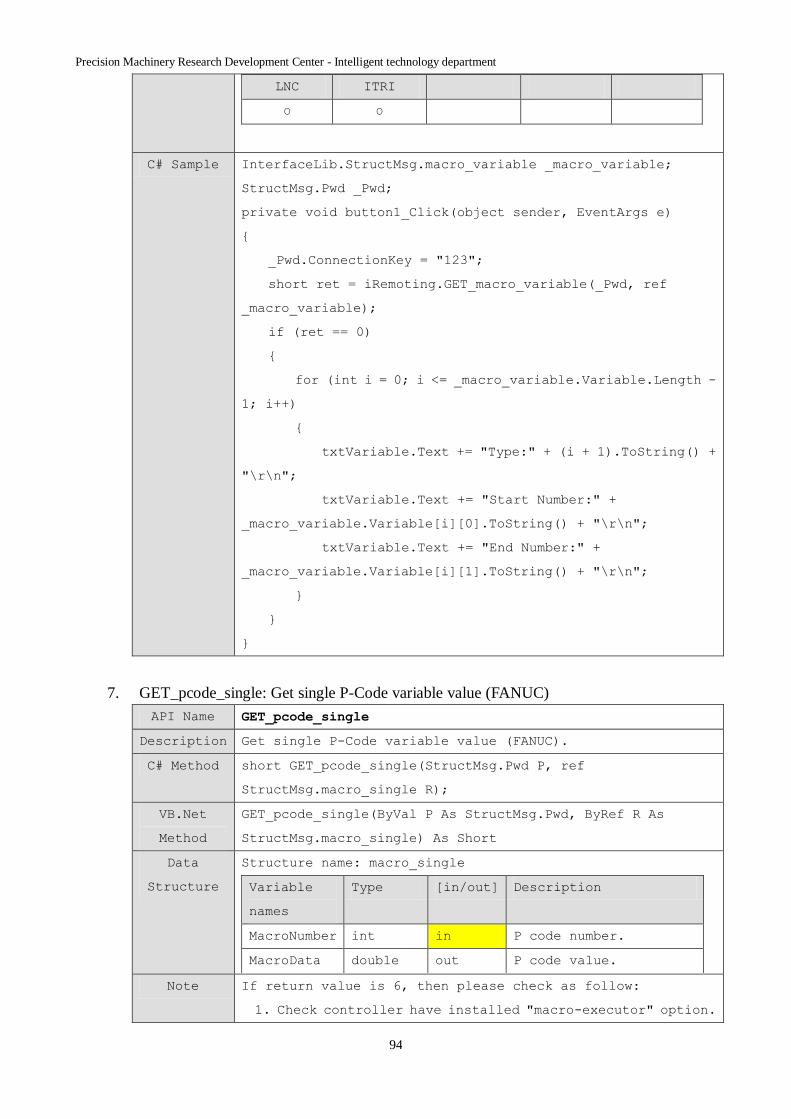
Precision Machinery Research Development Center - Intelligent technology department
94
LNC ITRI
O O
C# Sample InterfaceLib.StructMsg.macro_variable _macro_variable;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_macro_variable(_Pwd, ref
_macro_variable);
if (ret == 0)
{
for (int i = 0; i <= _macro_variable.Variable.Length -
1; i++)
{
txtVariable.Text += "Type:" + (i + 1).ToString() +
"\r\n";
txtVariable.Text += "Start Number:" +
_macro_variable.Variable[i][0].ToString() + "\r\n";
txtVariable.Text += "End Number:" +
_macro_variable.Variable[i][1].ToString() + "\r\n";
}
}
}
7. GET_pcode_single: Get single P-Code variable value (FANUC)
API Name GET_pcode_single
Description Get single P-Code variable value (FANUC).
C# Method short GET_pcode_single(StructMsg.Pwd P, ref
StructMsg.macro_single R);
VB.Net
Method
GET_pcode_single(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.macro_single) As Short
Data
Structure
Structure name: macro_single
Variable
names
Type [in/out] Description
MacroNumber int in P code number.
MacroData double out P code value.
Note If return value is 6, then please check as follow:
1. Check controller have installed "macro-executor" option.
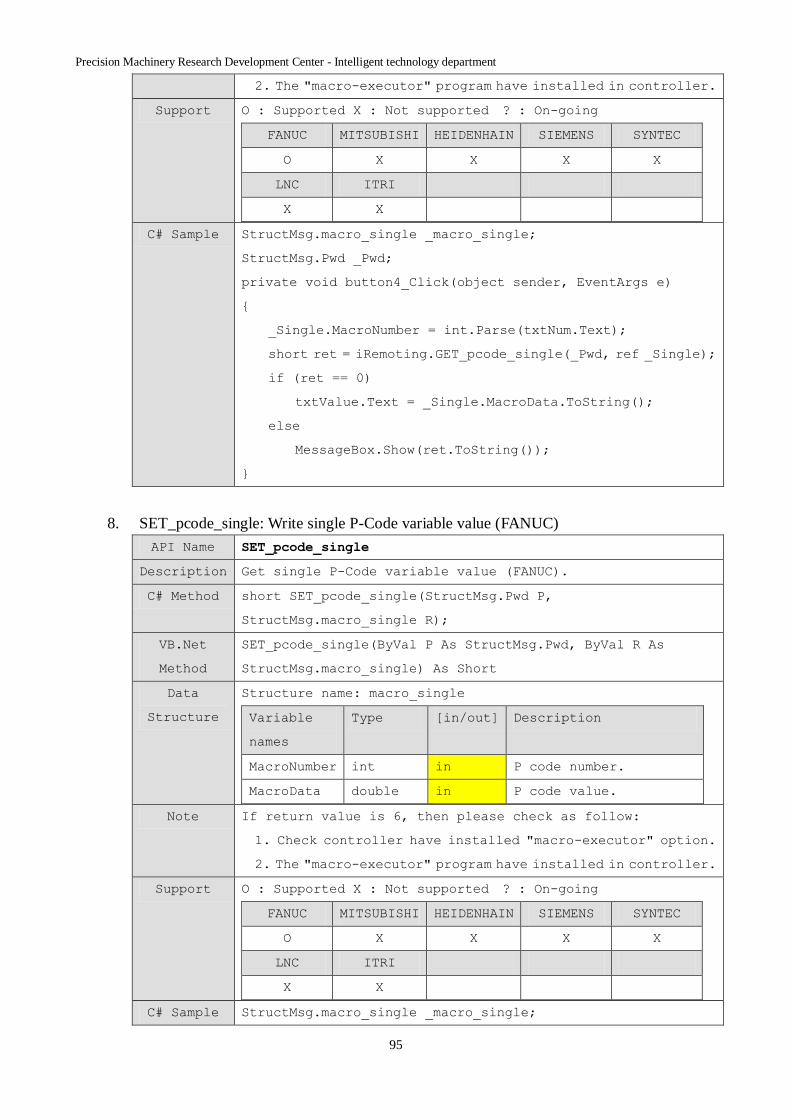
Precision Machinery Research Development Center - Intelligent technology department
95
2. The "macro-executor" program have installed in controller.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X X X
LNC ITRI
X X
C# Sample StructMsg.macro_single _macro_single;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_Single.MacroNumber = int.Parse(txtNum.Text);
short ret = iRemoting.GET_pcode_single(_Pwd, ref _Single);
if (ret == 0)
txtValue.Text = _Single.MacroData.ToString();
else
MessageBox.Show(ret.ToString());
}
8. SET_pcode_single: Write single P-Code variable value (FANUC)
API Name SET_pcode_single
Description Get single P-Code variable value (FANUC).
C# Method short SET_pcode_single(StructMsg.Pwd P,
StructMsg.macro_single R);
VB.Net
Method
SET_pcode_single(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.macro_single) As Short
Data
Structure
Structure name: macro_single
Variable
names
Type [in/out] Description
MacroNumber int in P code number.
MacroData double in P code value.
Note If return value is 6, then please check as follow:
1. Check controller have installed "macro-executor" option.
2. The "macro-executor" program have installed in controller.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X X X X
LNC ITRI
X X
C# Sample StructMsg.macro_single _macro_single;

Precision Machinery Research Development Center - Intelligent technology department
96
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_Single.MacroNumber = int.Parse(txtNum.Text);
_Single.MacroData = double.Parse(txtValue.Text);
short ret = iRemoting.SET_pcode_single(_Pwd, _Single);
}
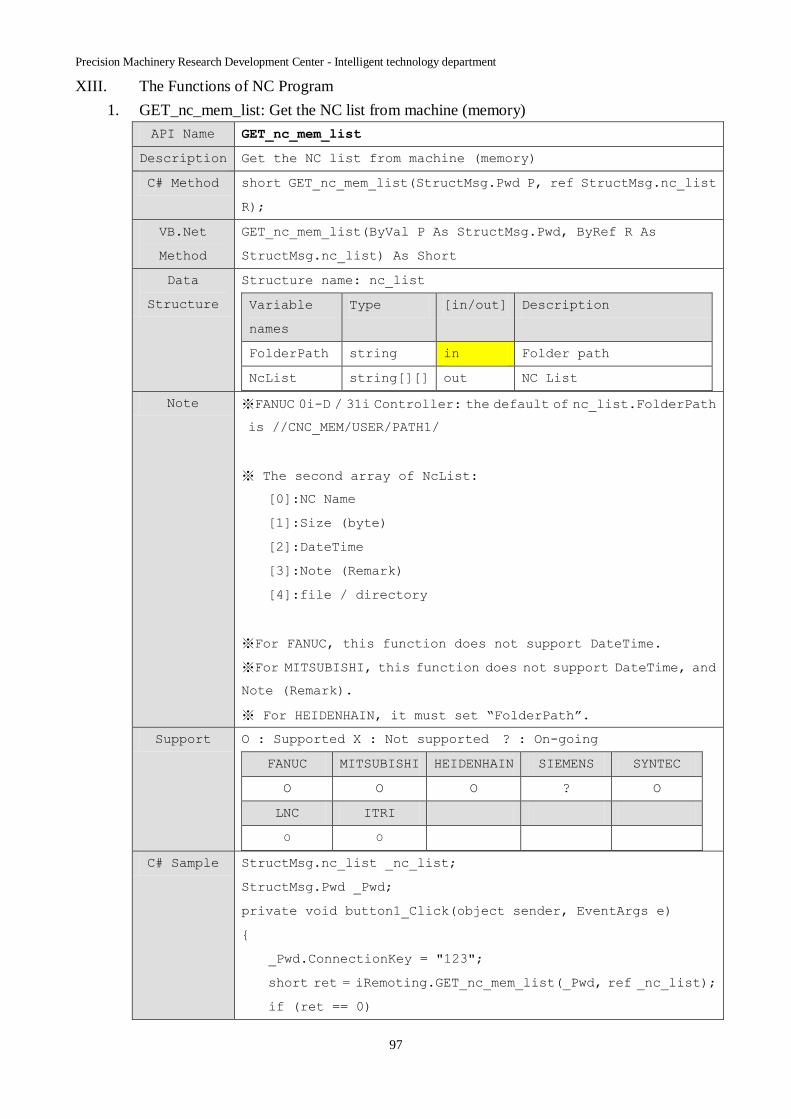
Precision Machinery Research Development Center - Intelligent technology department
97
XIII. The Functions of NC Program
1. GET_nc_mem_list: Get the NC list from machine (memory)
API Name GET_nc_mem_list
Description Get the NC list from machine (memory)
C# Method short GET_nc_mem_list(StructMsg.Pwd P, ref StructMsg.nc_list
R);
VB.Net
Method
GET_nc_mem_list(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.nc_list) As Short
Data
Structure
Structure name: nc_list
Variable
names
Type [in/out] Description
FolderPath string in Folder path
NcList string[][] out NC List
Note ※FANUC 0i-D / 31i Controller: the default of nc_list.FolderPath
is //CNC_MEM/USER/PATH1/
※ The second array of NcList:
[0]:NC Name
[1]:Size (byte)
[2]:DateTime
[3]:Note (Remark)
[4]:file / directory
※For FANUC, this function does not support DateTime.
※For MITSUBISHI, this function does not support DateTime, and
Note (Remark).
※ For HEIDENHAIN, it must set “FolderPath”.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.nc_list _nc_list;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_mem_list(_Pwd, ref _nc_list);
if (ret == 0)

Precision Machinery Research Development Center - Intelligent technology department
98
{
DataTable dtNcList = new DataTable();
dtNcList.Columns.Add("Name",
Type.GetType("System.String"));
dtNcList.Columns.Add("Size",
Type.GetType("System.Int32"));
dtNcList.Columns.Add("Remark",
Type.GetType("System.String"));
DataRow dr;
for (int i = 0; i <= _nc_list.NcList.Length - 1; i++)
{
dr = dtNcList.NewRow();
dr[0] = _nc_list.NcList[i][0];
dr[1] = int.Parse(_nc_list.NcList[i][1]);
dr[2] = _nc_list.NcList[i][3];
dtNcList.Rows.Add(dr);
}
dataGridView1.DataSource = dtNcList;
}
}
2. GET_nc_ftp_list: Get NC list from FTP
API Name GET_nc_ftp_list
Description Get NC list from FTP
C# Method short GET_nc_ftp_list(StructMsg.Pwd P, ref StructMsg.nc_list
R);
VB.Net
Method
GET_nc_ftp_list(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.nc_list) As Short
Data
Structure
Structure name: nc_list
Variable
names
Type [in/out] Description
FolderPath string in Not use
NcList string[][] out NC List
Note FANUC Controller must have DataServer, and must have set
username (account) and password.
The second array of NcList include:
[0]:NC name (Name)
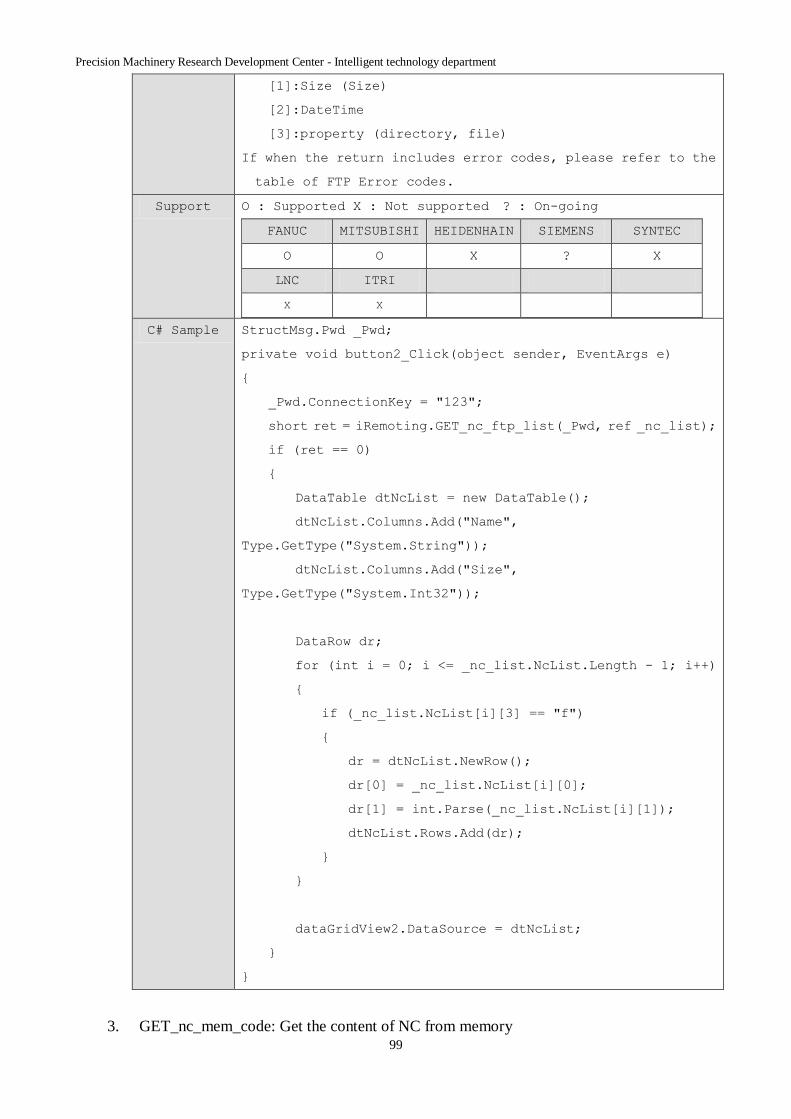
Precision Machinery Research Development Center - Intelligent technology department
99
[1]:Size (Size)
[2]:DateTime
[3]:property (directory, file)
If when the return includes error codes, please refer to the
table of FTP Error codes.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? X
LNC ITRI
X X
C# Sample StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_ftp_list(_Pwd, ref _nc_list);
if (ret == 0)
{
DataTable dtNcList = new DataTable();
dtNcList.Columns.Add("Name",
Type.GetType("System.String"));
dtNcList.Columns.Add("Size",
Type.GetType("System.Int32"));
DataRow dr;
for (int i = 0; i <= _nc_list.NcList.Length - 1; i++)
{
if (_nc_list.NcList[i][3] == "f")
{
dr = dtNcList.NewRow();
dr[0] = _nc_list.NcList[i][0];
dr[1] = int.Parse(_nc_list.NcList[i][1]);
dtNcList.Rows.Add(dr);
}
}
dataGridView2.DataSource = dtNcList;
}
}
3. GET_nc_mem_code: Get the content of NC from memory
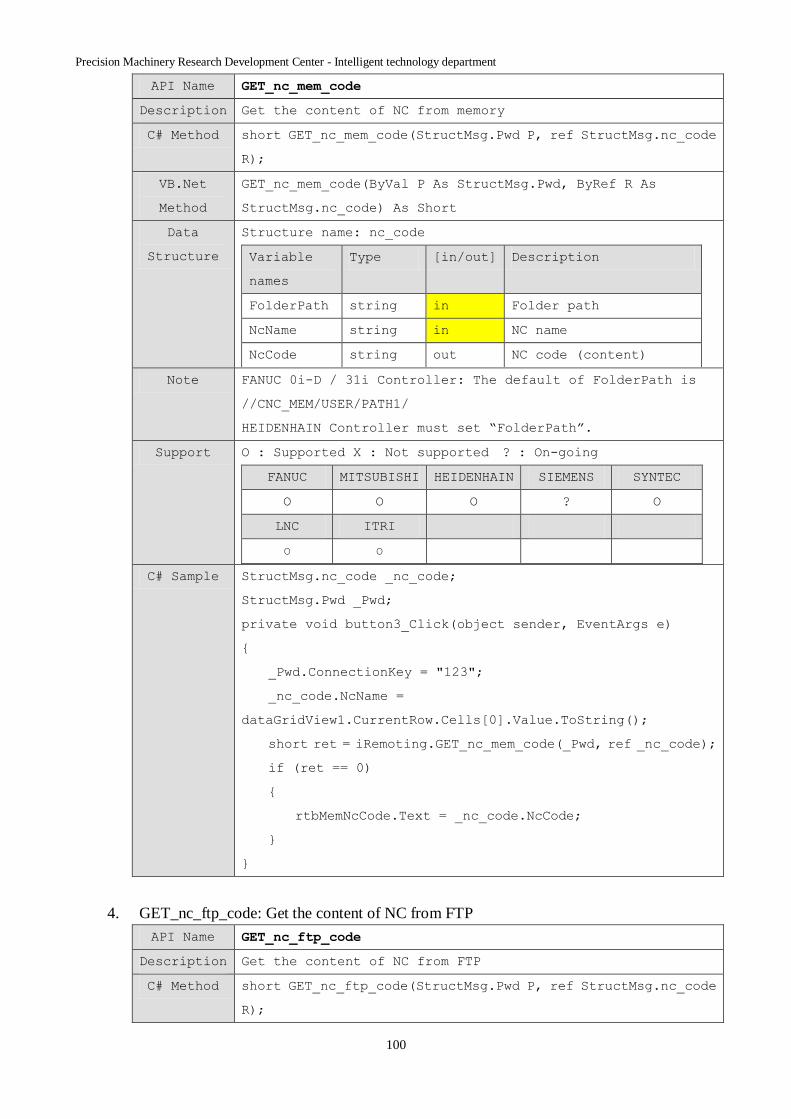
Precision Machinery Research Development Center - Intelligent technology department
100
API Name GET_nc_mem_code
Description Get the content of NC from memory
C# Method short GET_nc_mem_code(StructMsg.Pwd P, ref StructMsg.nc_code
R);
VB.Net
Method
GET_nc_mem_code(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.nc_code) As Short
Data
Structure
Structure name: nc_code
Variable
names
Type [in/out] Description
FolderPath string in Folder path
NcName string in NC name
NcCode string out NC code (content)
Note FANUC 0i-D / 31i Controller: The default of FolderPath is
//CNC_MEM/USER/PATH1/
HEIDENHAIN Controller must set “FolderPath”.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.nc_code _nc_code;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_nc_code.NcName =
dataGridView1.CurrentRow.Cells[0].Value.ToString();
short ret = iRemoting.GET_nc_mem_code(_Pwd, ref _nc_code);
if (ret == 0)
{
rtbMemNcCode.Text = _nc_code.NcCode;
}
}
4. GET_nc_ftp_code: Get the content of NC from FTP
API Name GET_nc_ftp_code
Description Get the content of NC from FTP
C# Method short GET_nc_ftp_code(StructMsg.Pwd P, ref StructMsg.nc_code
R);
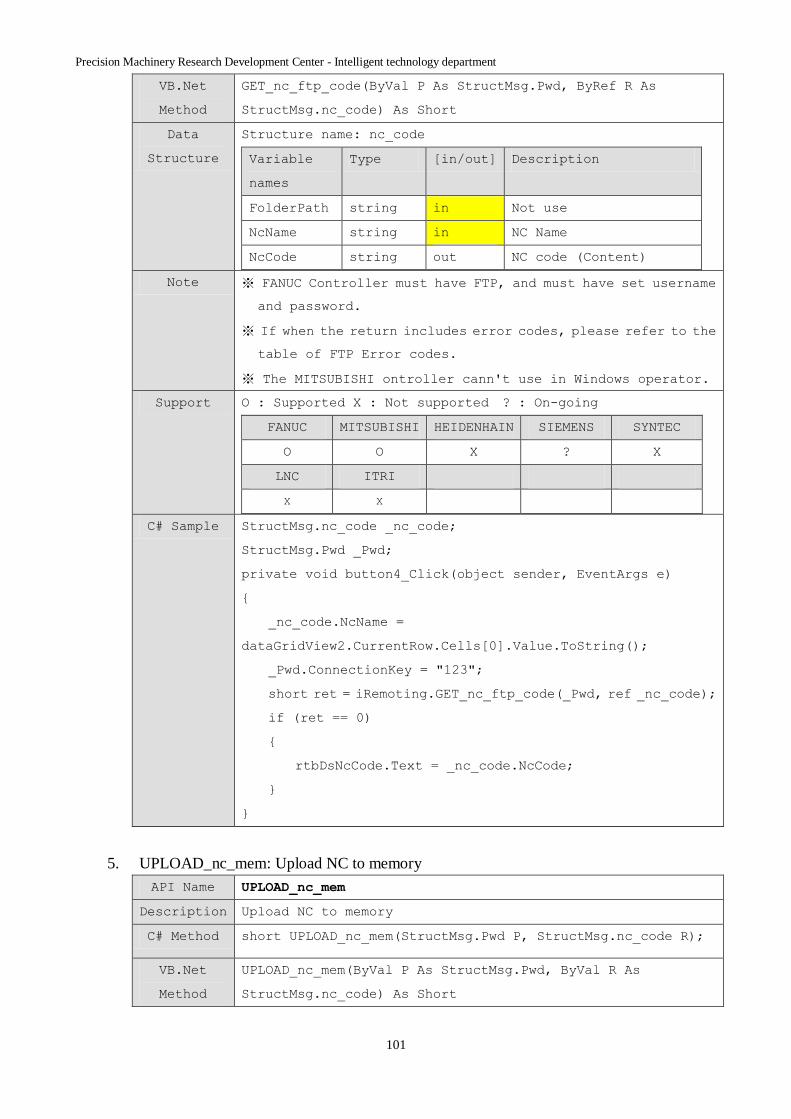
Precision Machinery Research Development Center - Intelligent technology department
101
VB.Net
Method
GET_nc_ftp_code(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.nc_code) As Short
Data
Structure
Structure name: nc_code
Variable
names
Type [in/out] Description
FolderPath string in Not use
NcName string in NC Name
NcCode string out NC code (Content)
Note ※ FANUC Controller must have FTP, and must have set username
and password.
※ If when the return includes error codes, please refer to the
table of FTP Error codes.
※ The MITSUBISHI ontroller cann't use in Windows operator.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? X
LNC ITRI
X X
C# Sample StructMsg.nc_code _nc_code;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_nc_code.NcName =
dataGridView2.CurrentRow.Cells[0].Value.ToString();
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_ftp_code(_Pwd, ref _nc_code);
if (ret == 0)
{
rtbDsNcCode.Text = _nc_code.NcCode;
}
}
5. UPLOAD_nc_mem: Upload NC to memory
API Name UPLOAD_nc_mem
Description Upload NC to memory
C# Method short UPLOAD_nc_mem(StructMsg.Pwd P, StructMsg.nc_code R);
VB.Net
Method
UPLOAD_nc_mem(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.nc_code) As Short
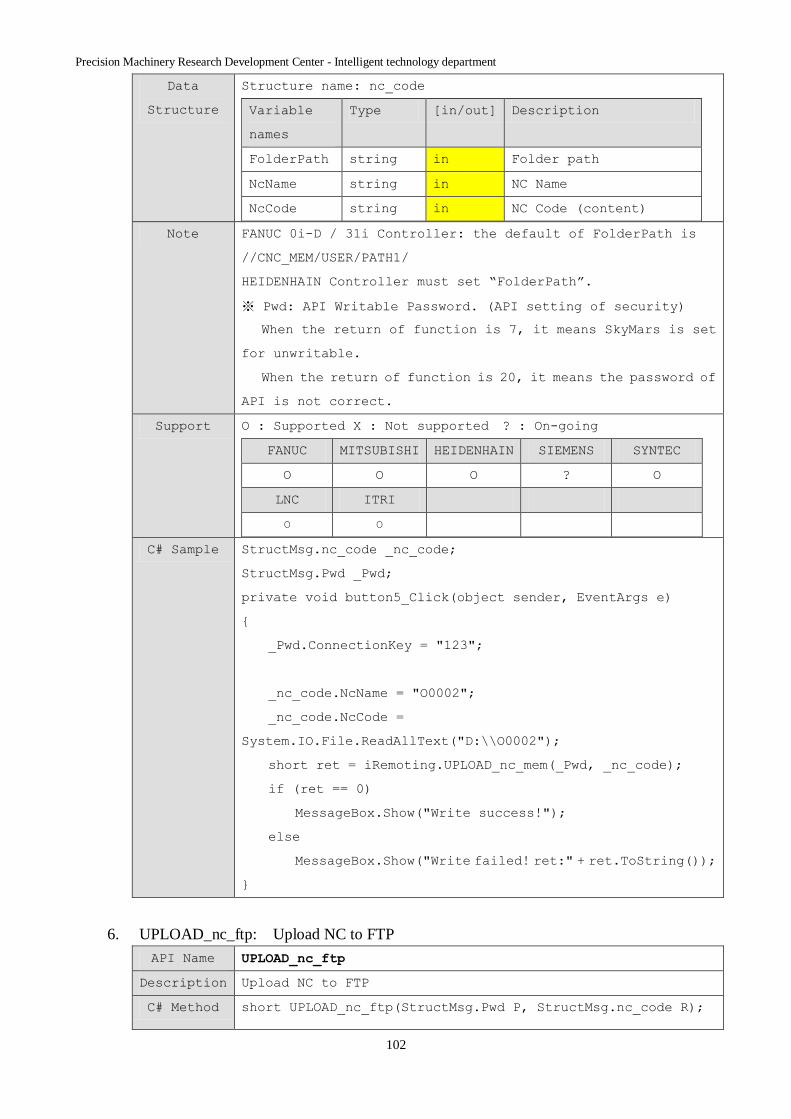
Precision Machinery Research Development Center - Intelligent technology department
102
Data
Structure
Structure name: nc_code
Variable
names
Type [in/out] Description
FolderPath string in Folder path
NcName string in NC Name
NcCode string in NC Code (content)
Note FANUC 0i-D / 31i Controller: the default of FolderPath is
//CNC_MEM/USER/PATH1/
HEIDENHAIN Controller must set “FolderPath”.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.nc_code _nc_code;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_nc_code.NcName = "O0002";
_nc_code.NcCode =
System.IO.File.ReadAllText("D:\\O0002");
short ret = iRemoting.UPLOAD_nc_mem(_Pwd, _nc_code);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
6. UPLOAD_nc_ftp: Upload NC to FTP
API Name UPLOAD_nc_ftp
Description Upload NC to FTP
C# Method short UPLOAD_nc_ftp(StructMsg.Pwd P, StructMsg.nc_code R);

Precision Machinery Research Development Center - Intelligent technology department
103
VB.Net
Method
UPLOAD_nc_ftp(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.nc_code) As Short
Data
Structure
Structure name: nc_code
Variable
names
Type [in/out] Description
FolderPath string in Folder path
NcName string in NC Name
NcCode string in Nc code (content)
Note FANUC Controller must have FTP, and must have set username and
password.
If when the return includes error codes, please refer to the
table of FTP Error codes.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
※ The MITSUBISHI ontroller cann't use in Windows operator.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? X
LNC ITRI
X X
C# Sample StructMsg.nc_code _nc_code;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_nc_code.NcName = "O0002";
_nc_code.NcCode =
System.IO.File.ReadAllText("D:\\O0002");
short ret = iRemoting.UPLOAD_nc_ftp(_Pwd, _nc_code);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
7. DEL_nc_mem: Delect NC from memory
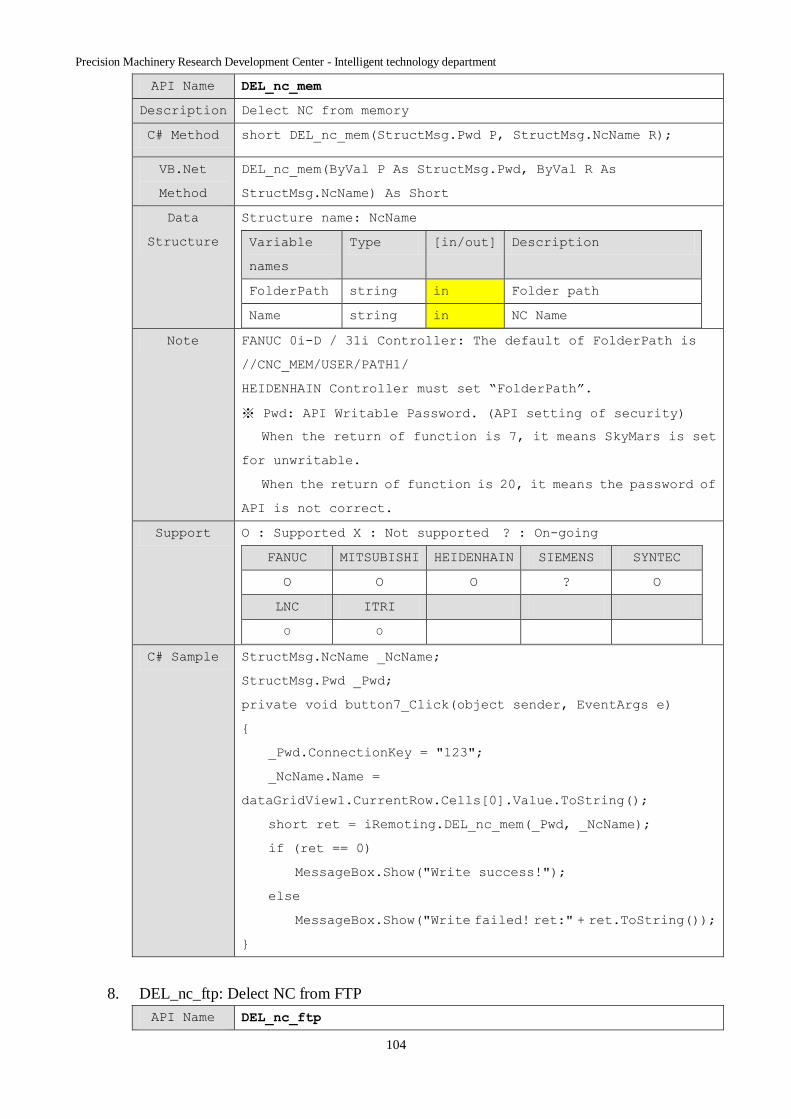
Precision Machinery Research Development Center - Intelligent technology department
104
API Name DEL_nc_mem
Description Delect NC from memory
C# Method short DEL_nc_mem(StructMsg.Pwd P, StructMsg.NcName R);
VB.Net
Method
DEL_nc_mem(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.NcName) As Short
Data
Structure
Structure name: NcName
Variable
names
Type [in/out] Description
FolderPath string in Folder path
Name string in NC Name
Note FANUC 0i-D / 31i Controller: The default of FolderPath is
//CNC_MEM/USER/PATH1/
HEIDENHAIN Controller must set “FolderPath”.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.NcName _NcName;
StructMsg.Pwd _Pwd;
private void button7_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_NcName.Name =
dataGridView1.CurrentRow.Cells[0].Value.ToString();
short ret = iRemoting.DEL_nc_mem(_Pwd, _NcName);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
8. DEL_nc_ftp: Delect NC from FTP
API Name DEL_nc_ftp
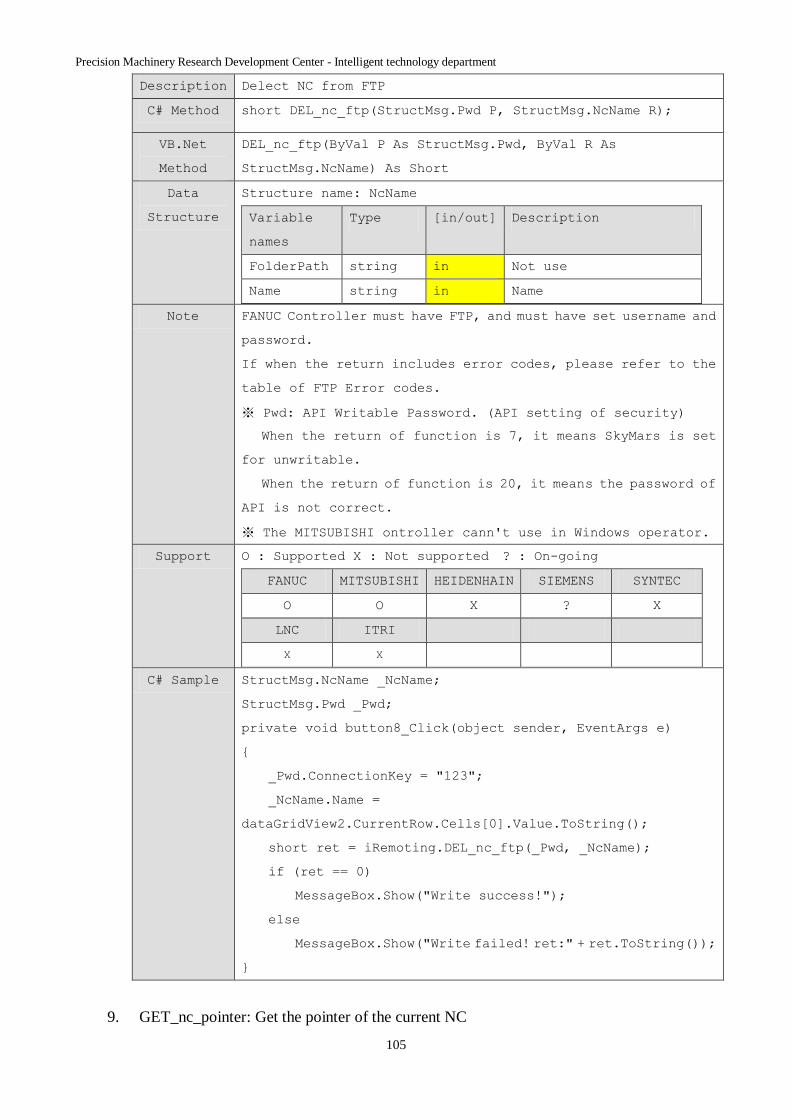
Precision Machinery Research Development Center - Intelligent technology department
105
Description Delect NC from FTP
C# Method short DEL_nc_ftp(StructMsg.Pwd P, StructMsg.NcName R);
VB.Net
Method
DEL_nc_ftp(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.NcName) As Short
Data
Structure
Structure name: NcName
Variable
names
Type [in/out] Description
FolderPath string in Not use
Name string in Name
Note FANUC Controller must have FTP, and must have set username and
password.
If when the return includes error codes, please refer to the
table of FTP Error codes.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
※ The MITSUBISHI ontroller cann't use in Windows operator.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? X
LNC ITRI
X X
C# Sample StructMsg.NcName _NcName;
StructMsg.Pwd _Pwd;
private void button8_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
_NcName.Name =
dataGridView2.CurrentRow.Cells[0].Value.ToString();
short ret = iRemoting.DEL_nc_ftp(_Pwd, _NcName);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show("Write failed! ret:" + ret.ToString());
}
9. GET_nc_pointer: Get the pointer of the current NC
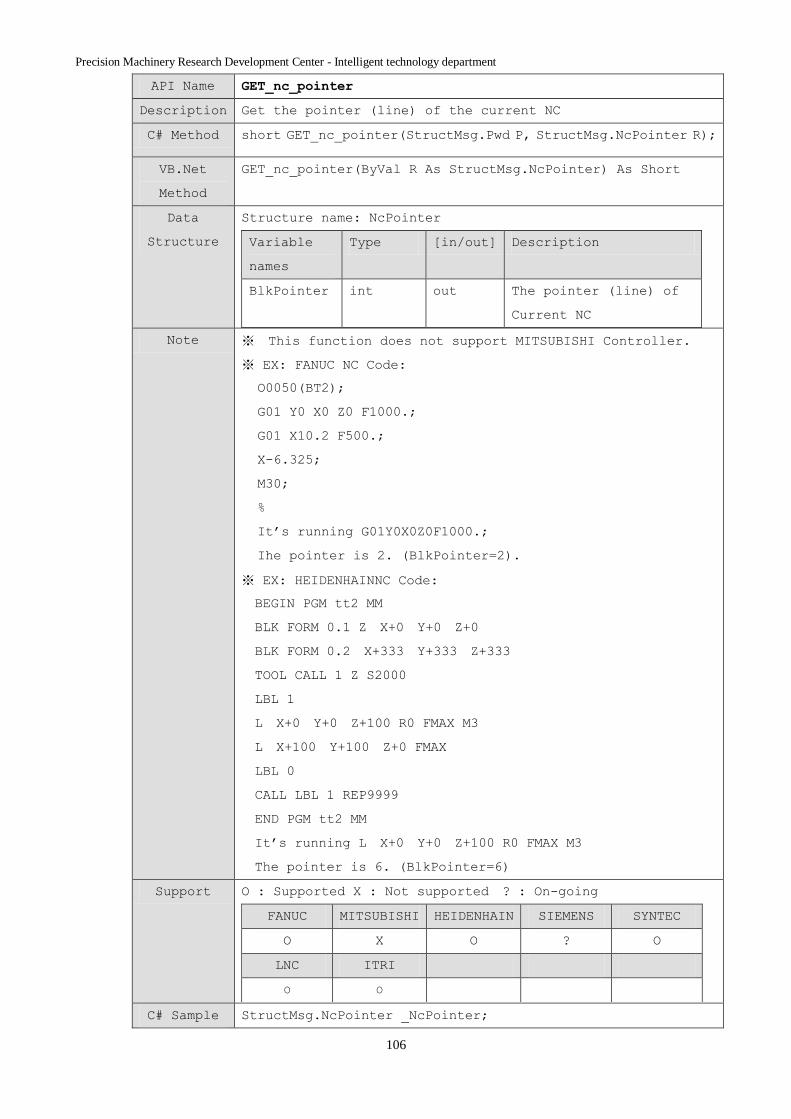
Precision Machinery Research Development Center - Intelligent technology department
106
API Name GET_nc_pointer
Description Get the pointer (line) of the current NC
C# Method short GET_nc_pointer(StructMsg.Pwd P, StructMsg.NcPointer R);
VB.Net
Method
GET_nc_pointer(ByVal R As StructMsg.NcPointer) As Short
Data
Structure
Structure name: NcPointer
Variable
names
Type [in/out] Description
BlkPointer int out The pointer (line) of
Current NC
Note ※ This function does not support MITSUBISHI Controller.
※ EX: FANUC NC Code:
O0050(BT2);
G01 Y0 X0 Z0 F1000.;
G01 X10.2 F500.;
X-6.325;
M30;
%
It’s running G01Y0X0Z0F1000.;
Ihe pointer is 2. (BlkPointer=2).
※ EX: HEIDENHAINNC Code:
BEGIN PGM tt2 MM
BLK FORM 0.1 Z X+0 Y+0 Z+0
BLK FORM 0.2 X+333 Y+333 Z+333
TOOL CALL 1 Z S2000
LBL 1
L X+0 Y+0 Z+100 R0 FMAX M3
L X+100 Y+100 Z+0 FMAX
LBL 0
CALL LBL 1 REP9999
END PGM tt2 MM
It’s running L X+0 Y+0 Z+100 R0 FMAX M3
The pointer is 6. (BlkPointer=6)
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O X O ? O
LNC ITRI
O O
C# Sample StructMsg.NcPointer _NcPointer;

Precision Machinery Research Development Center - Intelligent technology department
107
StructMsg.Pwd _Pwd;
private void button9_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_pointer(_Pwd, ref _NcPointer);
if (ret == 0)
{
txtPointer.Text = _NcPointer.BlkPointer.ToString();
}
}
10. GET_nc_current_block: Get the current and next block of NC
API Name GET_nc_current_block
Description Get the current and next block of NC
C# Method short GET_nc_current_block(StructMsg.Pwd P, ref
StructMsg.nc_current_block R);
VB.Net
Method
Data
Structure
Structure name: nc_current_block
Variable
names
Type [in/out] Description
Block string[] Out The block array
Note ※ "0"-th index in the array is the current block that NC is
running now.
※ It only read 256 bits.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O X
C# Sample StructMsg.nc_current_block _current_block;
StructMsg.Pwd _Pwd;
private void button10_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_current_block(_Pwd, ref
_current_block);
if (ret==0)
{

Precision Machinery Research Development Center - Intelligent technology department
108
for (int i = 0; i <= _current_block.Block.Length - 1;
i++)
{
richTextBox1.Text += _current_block.Block[i] +
";\r\n";
}
}
}
11. GET_nc_freespace: Get free space of NC
API Name GET_nc_freespace
Description Get free space of NC
C# Method short GET_nc_freespace(StructMsg.Pwd P, ref
StructMsg.nc_freespace R);
VB.Net
Method
Data
Structure
Structure name: nc_freespace
Variable
names
Type [in/out] Description
FreeSpace int Out Free space of NC
Note ※ The unit of FANUC and MITSUBISHI is CHAR.
※ The unit of HEIDENHAIN is byte.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample StructMsg.nc_freespace _nc_freespace;
StructMsg.Pwd _Pwd;
private void button11_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_nc_freespace(_Pwd, ref
_nc_freespace);
if (ret == 0)
{
MessageBox.Show("Free: " + _nc_freespace.FreeSpace);
}
}
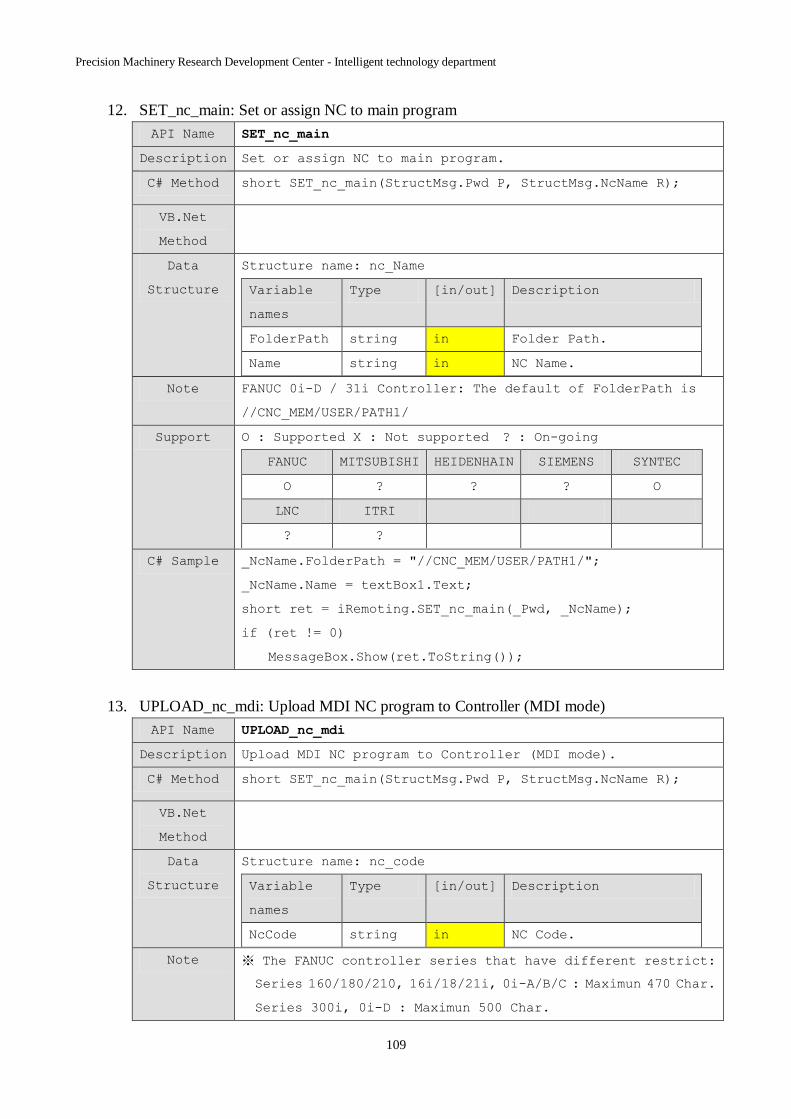
Precision Machinery Research Development Center - Intelligent technology department
109
12. SET_nc_main: Set or assign NC to main program
API Name SET_nc_main
Description Set or assign NC to main program.
C# Method short SET_nc_main(StructMsg.Pwd P, StructMsg.NcName R);
VB.Net
Method
Data
Structure
Structure name: nc_Name
Variable
names
Type [in/out] Description
FolderPath string in Folder Path.
Name string in NC Name.
Note FANUC 0i-D / 31i Controller: The default of FolderPath is
//CNC_MEM/USER/PATH1/
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
LNC ITRI
? ?
C# Sample _NcName.FolderPath = "//CNC_MEM/USER/PATH1/";
_NcName.Name = textBox1.Text;
short ret = iRemoting.SET_nc_main(_Pwd, _NcName);
if (ret != 0)
MessageBox.Show(ret.ToString());
13. UPLOAD_nc_mdi: Upload MDI NC program to Controller (MDI mode)
API Name UPLOAD_nc_mdi
Description Upload MDI NC program to Controller (MDI mode).
C# Method short SET_nc_main(StructMsg.Pwd P, StructMsg.NcName R);
VB.Net
Method
Data
Structure
Structure name: nc_code
Variable
names
Type [in/out] Description
NcCode string in NC Code.
Note ※ The FANUC controller series that have different restrict:
Series 160/180/210, 16i/18/21i, 0i-A/B/C : Maximun 470 Char.
Series 300i, 0i-D : Maximun 500 Char.
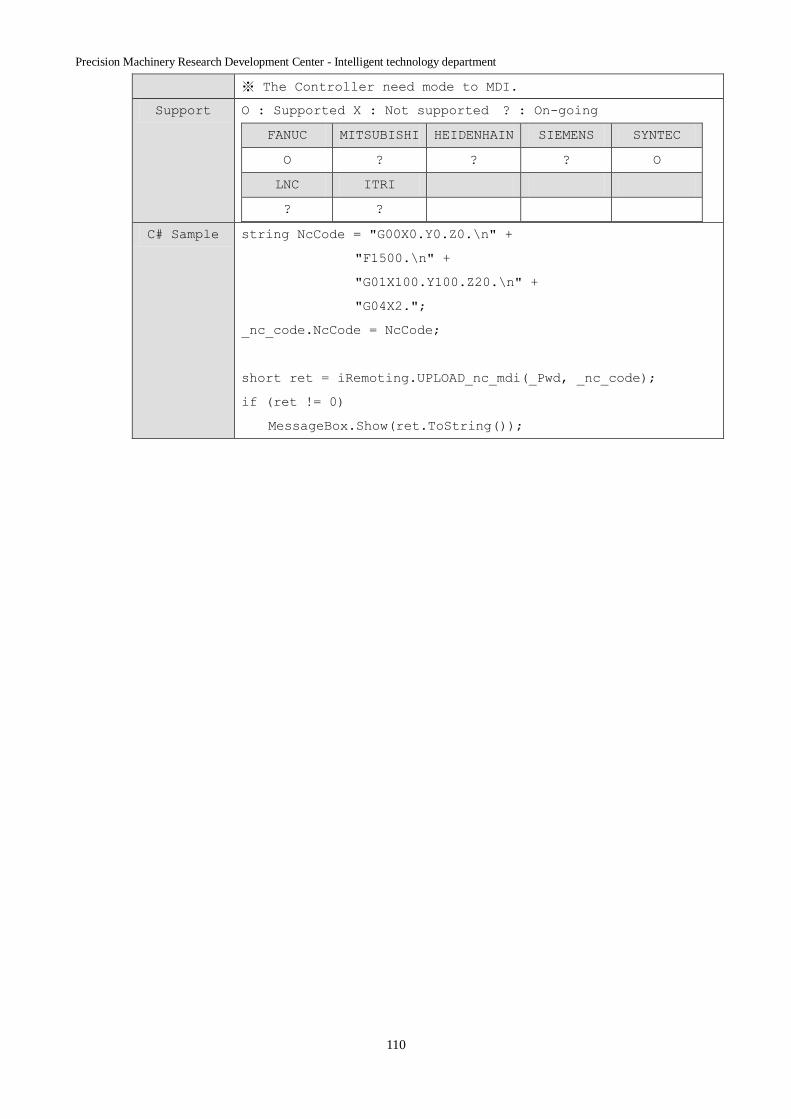
Precision Machinery Research Development Center - Intelligent technology department
110
※ The Controller need mode to MDI.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
LNC ITRI
? ?
C# Sample string NcCode = "G00X0.Y0.Z0.\n" +
"F1500.\n" +
"G01X100.Y100.Z20.\n" +
"G04X2.";
_nc_code.NcCode = NcCode;
short ret = iRemoting.UPLOAD_nc_mdi(_Pwd, _nc_code);
if (ret != 0)
MessageBox.Show(ret.ToString());
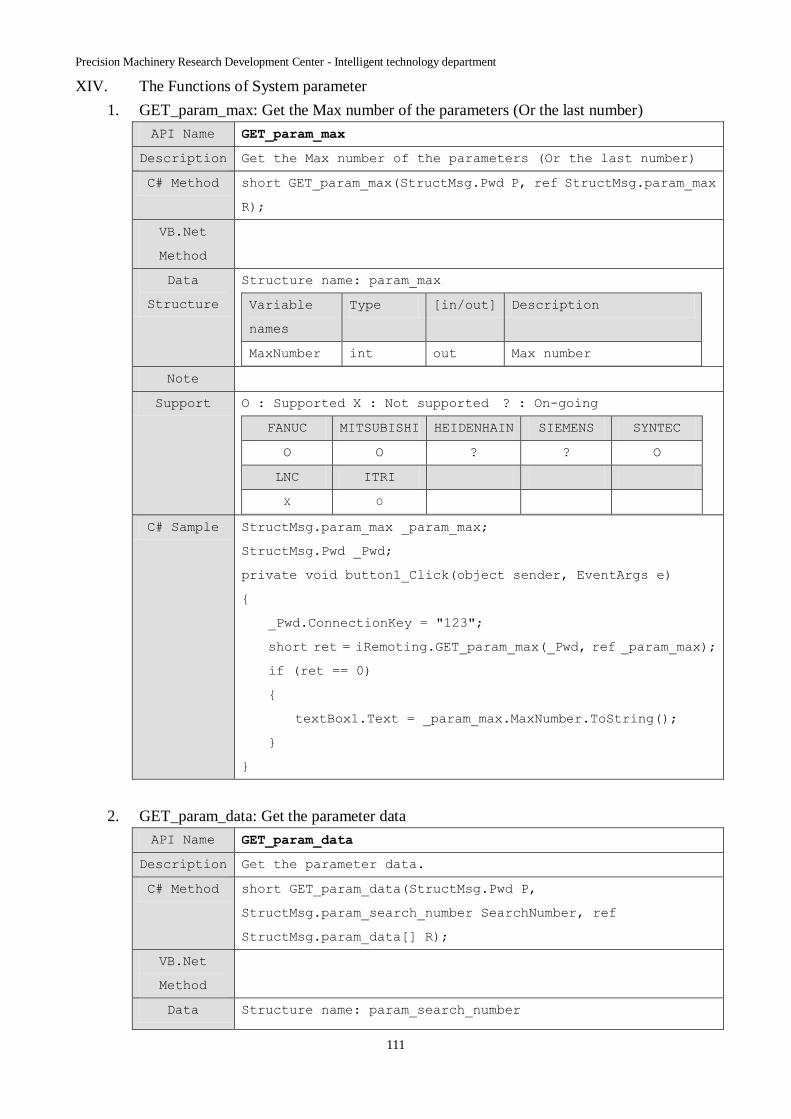
Precision Machinery Research Development Center - Intelligent technology department
111
XIV. The Functions of System parameter
1. GET_param_max: Get the Max number of the parameters (Or the last number)
API Name GET_param_max
Description Get the Max number of the parameters (Or the last number)
C# Method short GET_param_max(StructMsg.Pwd P, ref StructMsg.param_max
R);
VB.Net
Method
Data
Structure
Structure name: param_max
Variable
names
Type [in/out] Description
MaxNumber int out Max number
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O ? ? O
LNC ITRI
X O
C# Sample StructMsg.param_max _param_max;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_param_max(_Pwd, ref _param_max);
if (ret == 0)
{
textBox1.Text = _param_max.MaxNumber.ToString();
}
}
2. GET_param_data: Get the parameter data
API Name GET_param_data
Description Get the parameter data.
C# Method short GET_param_data(StructMsg.Pwd P,
StructMsg.param_search_number SearchNumber, ref
StructMsg.param_data[] R);
VB.Net
Method
Data Structure name: param_search_number
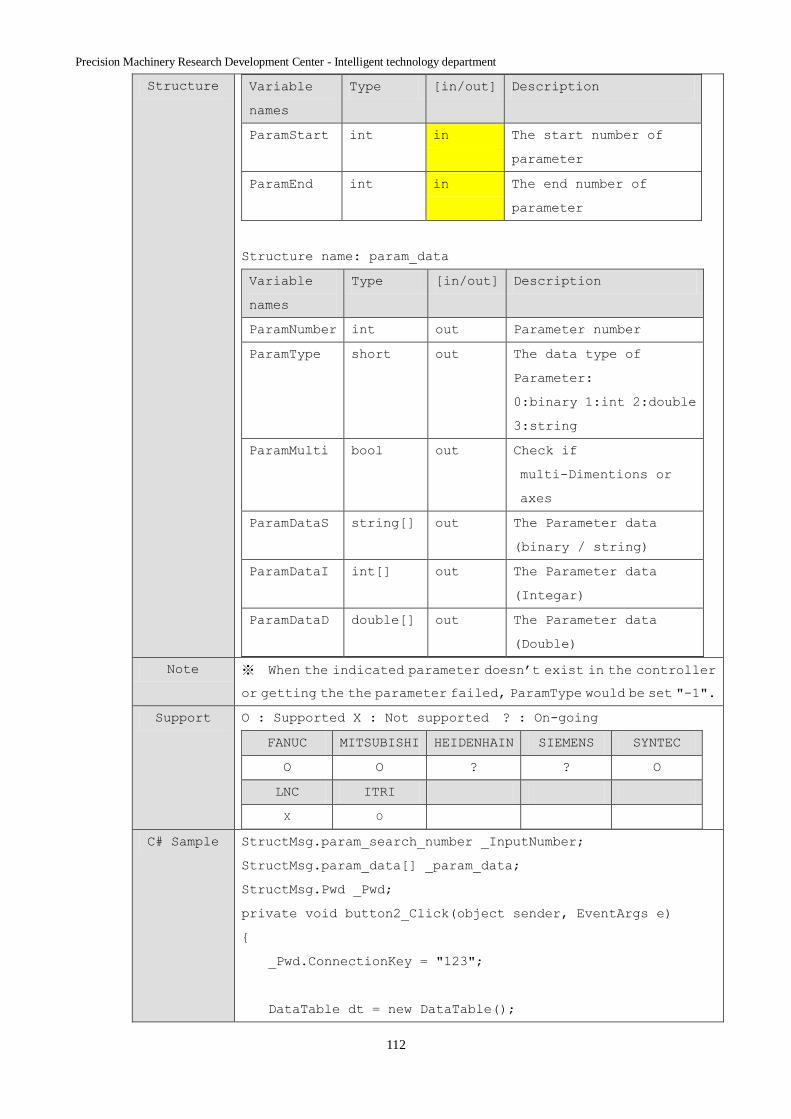
Precision Machinery Research Development Center - Intelligent technology department
112
Structure Variable
names
Type [in/out] Description
ParamStart int in The start number of
parameter
ParamEnd int in The end number of
parameter
Structure name: param_data
Variable
names
Type [in/out] Description
ParamNumber int out Parameter number
ParamType short out The data type of
Parameter:
0:binary 1:int 2:double
3:string
ParamMulti bool out Check if
multi-Dimentions or
axes
ParamDataS string[] out The Parameter data
(binary / string)
ParamDataI int[] out The Parameter data
(Integar)
ParamDataD double[] out The Parameter data
(Double)
Note ※ When the indicated parameter doesn’t exist in the controller
or getting the the parameter failed, ParamType would be set "-1".
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O ? ? O
LNC ITRI
X O
C# Sample StructMsg.param_search_number _InputNumber;
StructMsg.param_data[] _param_data;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
DataTable dt = new DataTable();
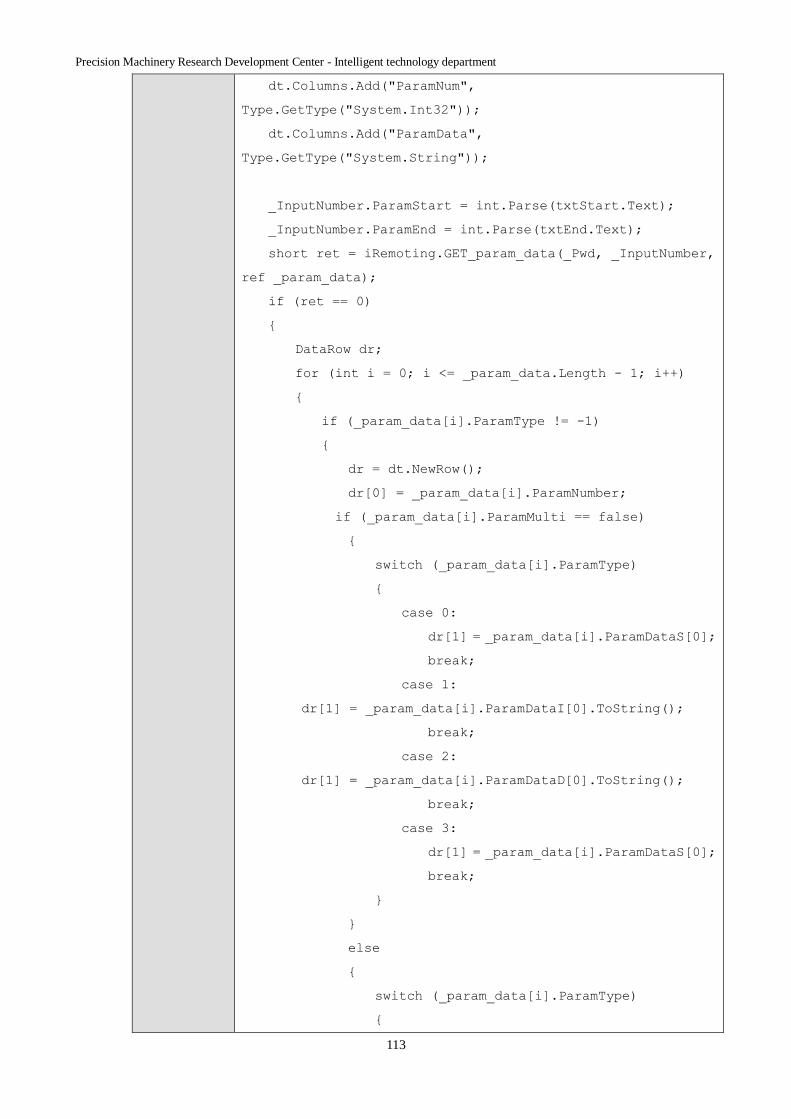
Precision Machinery Research Development Center - Intelligent technology department
113
dt.Columns.Add("ParamNum",
Type.GetType("System.Int32"));
dt.Columns.Add("ParamData",
Type.GetType("System.String"));
_InputNumber.ParamStart = int.Parse(txtStart.Text);
_InputNumber.ParamEnd = int.Parse(txtEnd.Text);
short ret = iRemoting.GET_param_data(_Pwd, _InputNumber,
ref _param_data);
if (ret == 0)
{
DataRow dr;
for (int i = 0; i <= _param_data.Length - 1; i++)
{
if (_param_data[i].ParamType != -1)
{
dr = dt.NewRow();
dr[0] = _param_data[i].ParamNumber;
if (_param_data[i].ParamMulti == false)
{
switch (_param_data[i].ParamType)
{
case 0:
dr[1] = _param_data[i].ParamDataS[0];
break;
case 1:
dr[1] = _param_data[i].ParamDataI[0].ToString();
break;
case 2:
dr[1] = _param_data[i].ParamDataD[0].ToString();
break;
case 3:
dr[1] = _param_data[i].ParamDataS[0];
break;
}
}
else
{
switch (_param_data[i].ParamType)
{
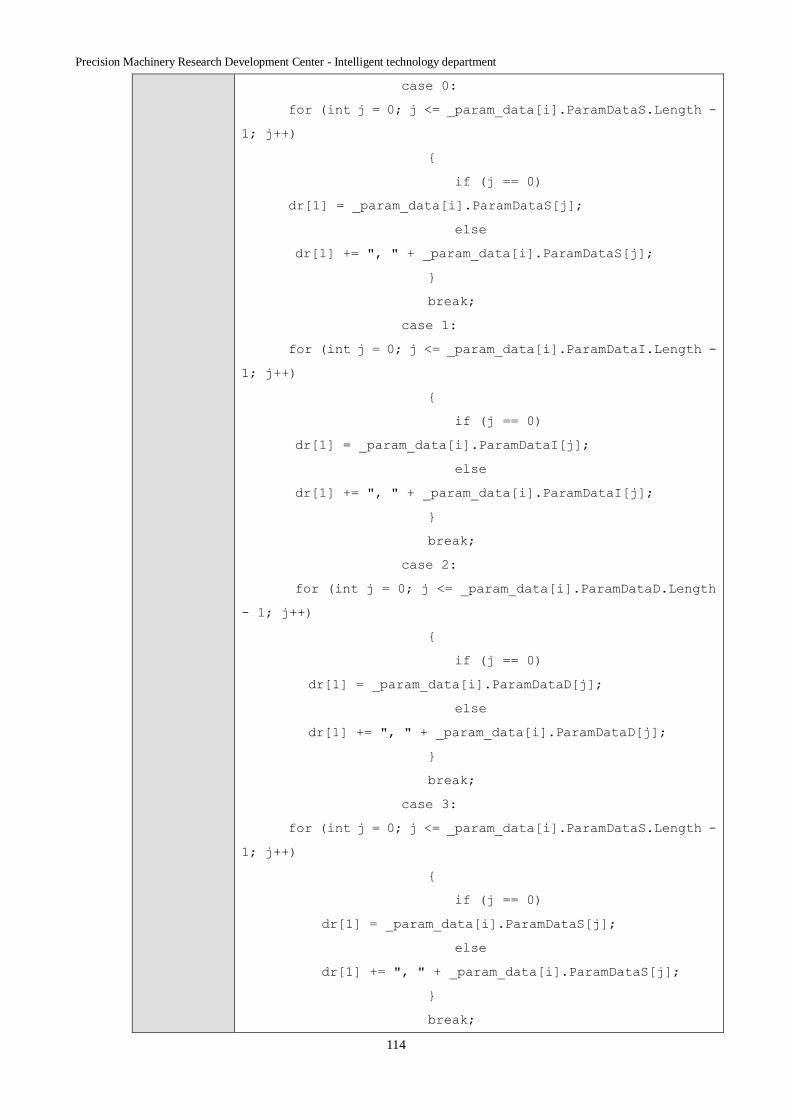
Precision Machinery Research Development Center - Intelligent technology department
114
case 0:
for (int j = 0; j <= _param_data[i].ParamDataS.Length -
1; j++)
{
if (j == 0)
dr[1] = _param_data[i].ParamDataS[j];
else
dr[1] += ", " + _param_data[i].ParamDataS[j];
}
break;
case 1:
for (int j = 0; j <= _param_data[i].ParamDataI.Length -
1; j++)
{
if (j == 0)
dr[1] = _param_data[i].ParamDataI[j];
else
dr[1] += ", " + _param_data[i].ParamDataI[j];
}
break;
case 2:
for (int j = 0; j <= _param_data[i].ParamDataD.Length
- 1; j++)
{
if (j == 0)
dr[1] = _param_data[i].ParamDataD[j];
else
dr[1] += ", " + _param_data[i].ParamDataD[j];
}
break;
case 3:
for (int j = 0; j <= _param_data[i].ParamDataS.Length -
1; j++)
{
if (j == 0)
dr[1] = _param_data[i].ParamDataS[j];
else
dr[1] += ", " + _param_data[i].ParamDataS[j];
}
break;

Precision Machinery Research Development Center - Intelligent technology department
115
}
}
dt.Rows.Add(dr);
}
}
dataGridView1.DataSource = dt;
}
}
3. SET_param_data: Set the parameter data
API Name GET_param_max
Description Set the parameter data.
C# Method short SET_param_data(StructMsg.Pwd P, StructMsg.param_data[]
R);
VB.Net
Method
Data
Structure
Structure name: param_data
Variable
names
Type [in/out] Description
ParamNumber int in Parameter number
ParamType short in The data type of
Parameter:
0:binary 1:int 2:double
3:string
ParamMulti bool in Check if
multi-Dimentions or
axes
ParamDataS string[] in The Parameter data
(binary / string)
ParamDataI int[] in The Parameter data
(Integar)
ParamDataD double[] in The Parameter data
(Double)
Note
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
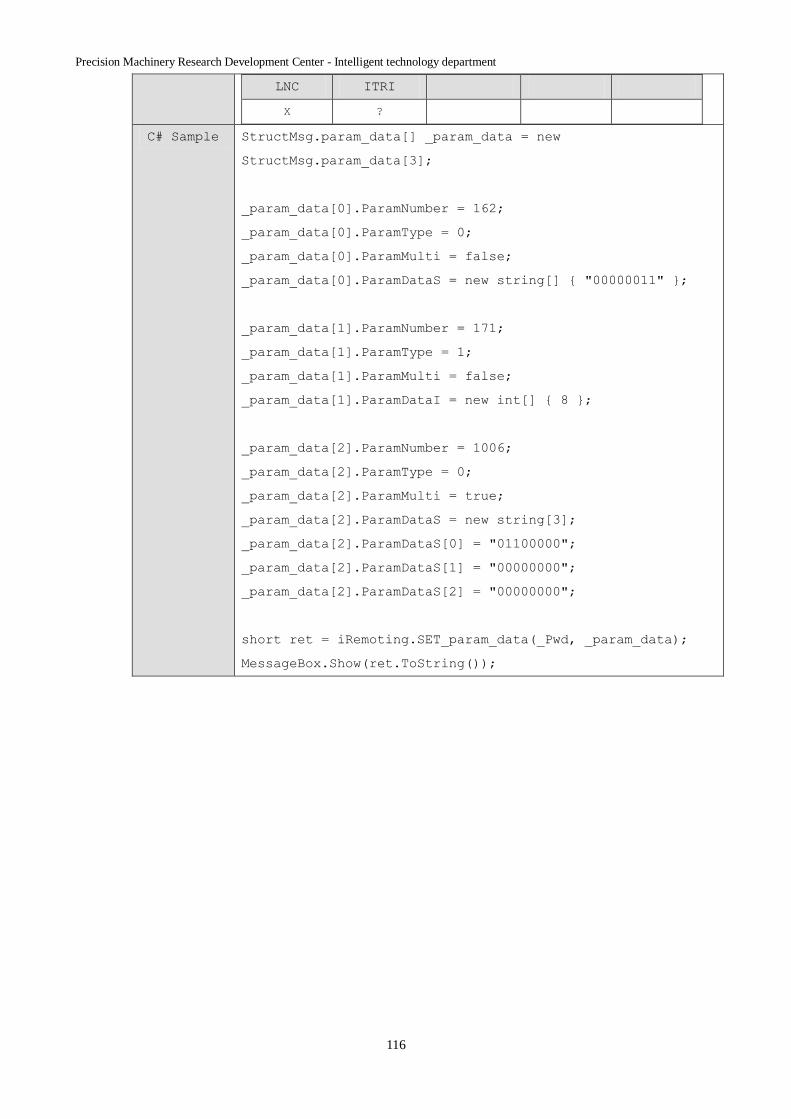
Precision Machinery Research Development Center - Intelligent technology department
116
LNC ITRI
X ?
C# Sample StructMsg.param_data[] _param_data = new
StructMsg.param_data[3];
_param_data[0].ParamNumber = 162;
_param_data[0].ParamType = 0;
_param_data[0].ParamMulti = false;
_param_data[0].ParamDataS = new string[] { "00000011" };
_param_data[1].ParamNumber = 171;
_param_data[1].ParamType = 1;
_param_data[1].ParamMulti = false;
_param_data[1].ParamDataI = new int[] { 8 };
_param_data[2].ParamNumber = 1006;
_param_data[2].ParamType = 0;
_param_data[2].ParamMulti = true;
_param_data[2].ParamDataS = new string[3];
_param_data[2].ParamDataS[0] = "01100000";
_param_data[2].ParamDataS[1] = "00000000";
_param_data[2].ParamDataS[2] = "00000000";
short ret = iRemoting.SET_param_data(_Pwd, _param_data);
MessageBox.Show(ret.ToString());
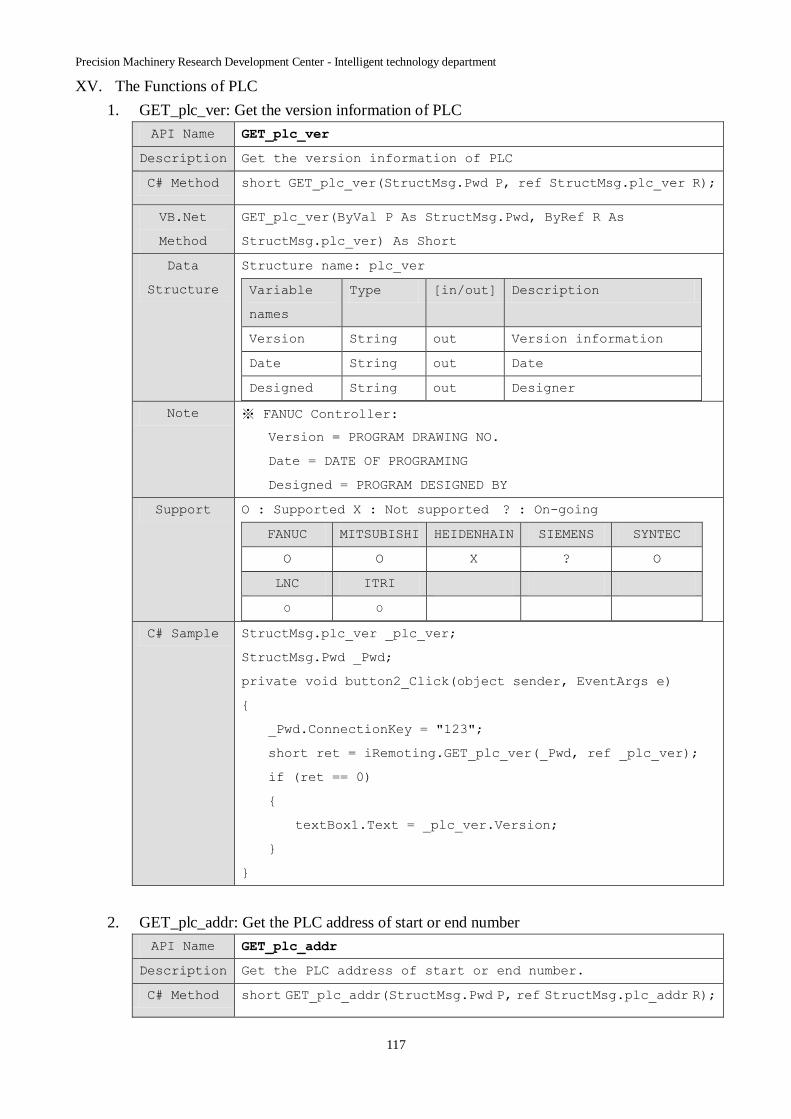
Precision Machinery Research Development Center - Intelligent technology department
117
XV. The Functions of PLC
1. GET_plc_ver: Get the version information of PLC
API Name GET_plc_ver
Description Get the version information of PLC
C# Method short GET_plc_ver(StructMsg.Pwd P, ref StructMsg.plc_ver R);
VB.Net
Method
GET_plc_ver(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.plc_ver) As Short
Data
Structure
Structure name: plc_ver
Variable
names
Type [in/out] Description
Version String out Version information
Date String out Date
Designed String out Designer
Note ※ FANUC Controller:
Version = PROGRAM DRAWING NO.
Date = DATE OF PROGRAMING
Designed = PROGRAM DESIGNED BY
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O X ? O
LNC ITRI
O O
C# Sample StructMsg.plc_ver _plc_ver;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_plc_ver(_Pwd, ref _plc_ver);
if (ret == 0)
{
textBox1.Text = _plc_ver.Version;
}
}
2. GET_plc_addr: Get the PLC address of start or end number
API Name GET_plc_addr
Description Get the PLC address of start or end number.
C# Method short GET_plc_addr(StructMsg.Pwd P, ref StructMsg.plc_addr R);
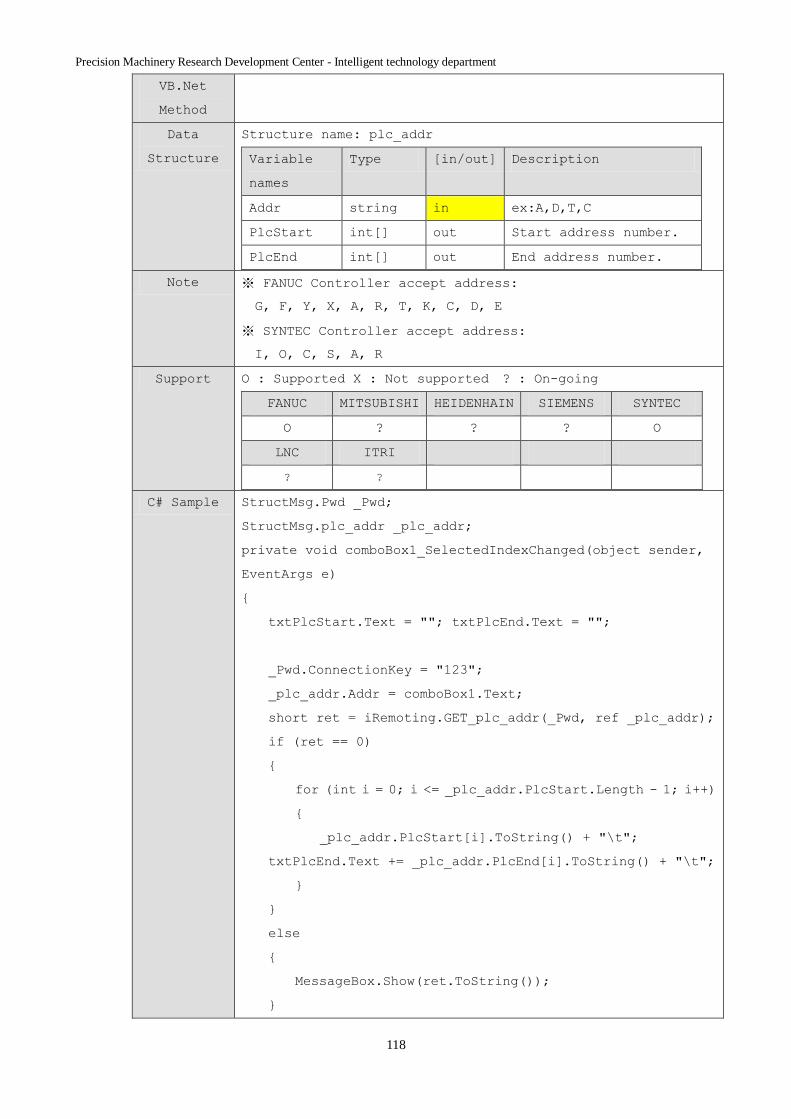
Precision Machinery Research Development Center - Intelligent technology department
118
VB.Net
Method
Data
Structure
Structure name: plc_addr
Variable
names
Type [in/out] Description
Addr string in ex:A,D,T,C
PlcStart int[] out Start address number.
PlcEnd int[] out End address number.
Note ※ FANUC Controller accept address:
G, F, Y, X, A, R, T, K, C, D, E
※ SYNTEC Controller accept address:
I, O, C, S, A, R
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
LNC ITRI
? ?
C# Sample StructMsg.Pwd _Pwd;
StructMsg.plc_addr _plc_addr;
private void comboBox1_SelectedIndexChanged(object sender,
EventArgs e)
{
txtPlcStart.Text = ""; txtPlcEnd.Text = "";
_Pwd.ConnectionKey = "123";
_plc_addr.Addr = comboBox1.Text;
short ret = iRemoting.GET_plc_addr(_Pwd, ref _plc_addr);
if (ret == 0)
{
for (int i = 0; i <= _plc_addr.PlcStart.Length - 1; i++)
{
txtPlcStart.Text += _plc_addr.PlcStart[i].ToString() + "\t";
txtPlcEnd.Text += _plc_addr.PlcEnd[i].ToString() + "\t";
}
}
else
{
MessageBox.Show(ret.ToString());
}

Precision Machinery Research Development Center - Intelligent technology department
119
}
3. GET_plc_addr2: Get the PLC address of start or end number
API Name GET_plc_addr2
Description Get the PLC address of start or end number.
C# Method short GET_plc_addr2(StructMsg.Pwd P, ref StructMsg.plc_addr2
R);
VB.Net
Method
Data
Structure
Structure name: plc_addr2
Variable
names
Type [in/out] Description
Version string in ex:A,D,T,C
PlcStart int[] out Start address number.
PlcEnd int[] out End address number.
PlcType short[] out 0:byte, 1:short, 2:int
3:bool, 4:double,
5:string
6:sbyte
Note ※ FANUC Controller accept address:
G, F, Y, X, A, R, T, K, C, D, E
※ SYNTEC Controller accept address:
I, O, C, S, A, R
※ HEIDENHAIN Controller accept address:
M, B, W, D, I, O, T, C, S, IB, IW, ID, OB, OW, OD
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? O ? O
LNC ITRI
? ?
C# Sample StructMsg.plc_addr2 _plc_addr2 = new StructMsg.plc_addr2();
_Pwd.ConnectionKey = "123";
_plc_addr2.Addr = comHeidAddr.Text;
short ret = iRemoting.GET_plc_addr2(_Pwd, ref _plc_addr2);
if (ret == 0)
{
txtHeidStart.Text = _plc_addr2.PlcStart[0].ToString();
txtHeidEnd.Text = _plc_addr2.PlcEnd[0].ToString();
txtHeidType.Text = _plc_addr2.PlcType[0].ToString();
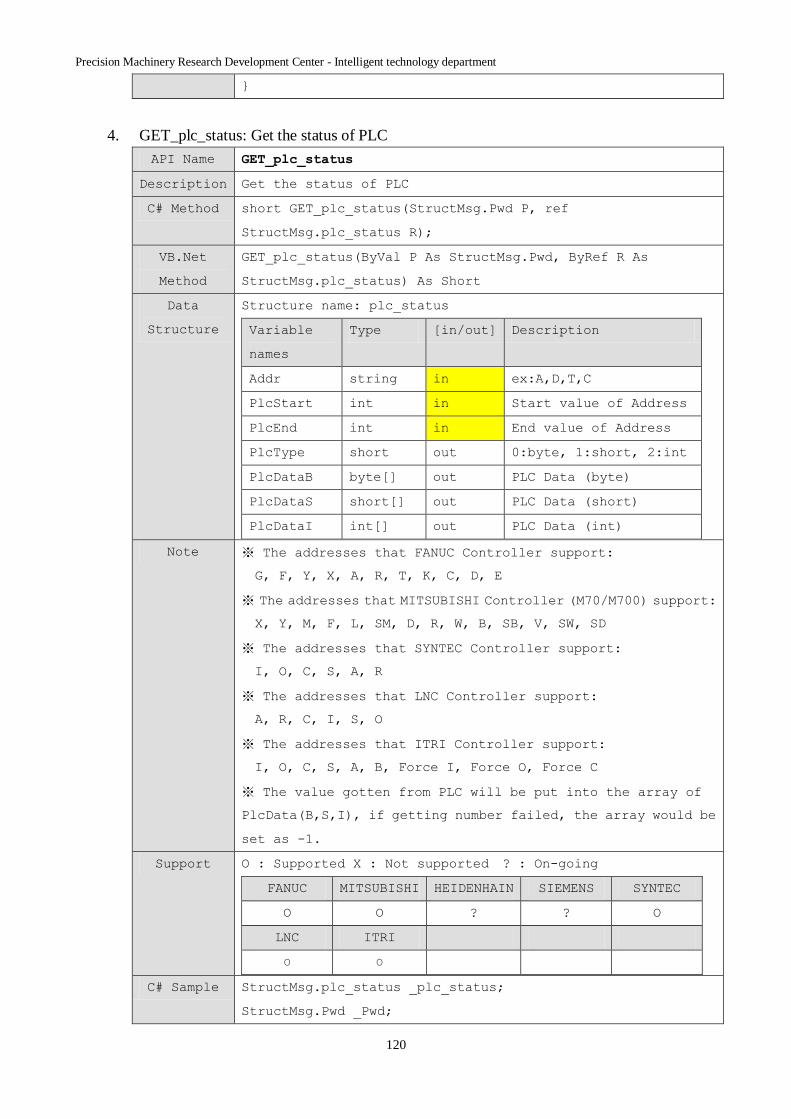
Precision Machinery Research Development Center - Intelligent technology department
120
}
4. GET_plc_status: Get the status of PLC
API Name GET_plc_status
Description Get the status of PLC
C# Method short GET_plc_status(StructMsg.Pwd P, ref
StructMsg.plc_status R);
VB.Net
Method
GET_plc_status(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.plc_status) As Short
Data
Structure
Structure name: plc_status
Variable
names
Type [in/out] Description
Addr string in ex:A,D,T,C
PlcStart int in Start value of Address
PlcEnd int in End value of Address
PlcType short out 0:byte, 1:short, 2:int
PlcDataB byte[] out PLC Data (byte)
PlcDataS short[] out PLC Data (short)
PlcDataI int[] out PLC Data (int)
Note ※ The addresses that FANUC Controller support:
G, F, Y, X, A, R, T, K, C, D, E
※ The addresses that MITSUBISHI Controller (M70/M700) support:
X, Y, M, F, L, SM, D, R, W, B, SB, V, SW, SD
※ The addresses that SYNTEC Controller support:
I, O, C, S, A, R
※ The addresses that LNC Controller support:
A, R, C, I, S, O
※ The addresses that ITRI Controller support:
I, O, C, S, A, B, Force I, Force O, Force C
※ The value gotten from PLC will be put into the array of
PlcData(B,S,I), if getting number failed, the array would be
set as -1.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O ? ? O
LNC ITRI
O O
C# Sample StructMsg.plc_status _plc_status;
StructMsg.Pwd _Pwd;
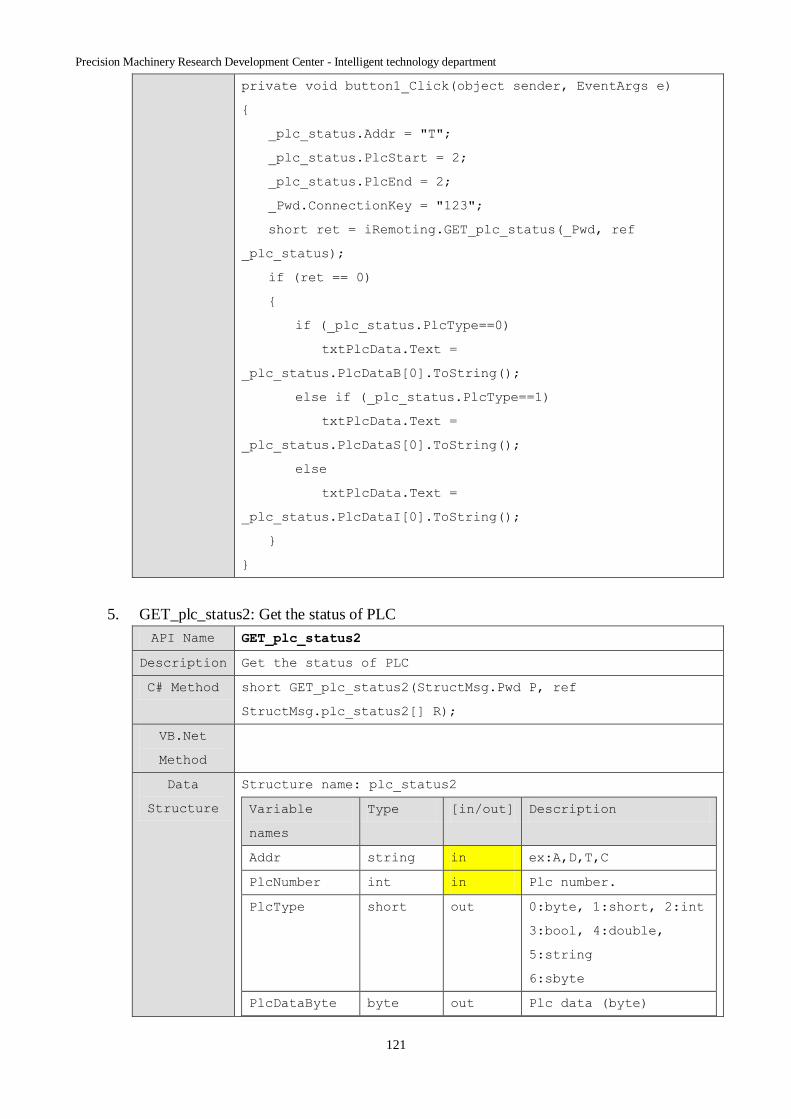
Precision Machinery Research Development Center - Intelligent technology department
121
private void button1_Click(object sender, EventArgs e)
{
_plc_status.Addr = "T";
_plc_status.PlcStart = 2;
_plc_status.PlcEnd = 2;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_plc_status(_Pwd, ref
_plc_status);
if (ret == 0)
{
if (_plc_status.PlcType==0)
txtPlcData.Text =
_plc_status.PlcDataB[0].ToString();
else if (_plc_status.PlcType==1)
txtPlcData.Text =
_plc_status.PlcDataS[0].ToString();
else
txtPlcData.Text =
_plc_status.PlcDataI[0].ToString();
}
}
5. GET_plc_status2: Get the status of PLC
API Name GET_plc_status2
Description Get the status of PLC
C# Method short GET_plc_status2(StructMsg.Pwd P, ref
StructMsg.plc_status2[] R);
VB.Net
Method
Data
Structure
Structure name: plc_status2
Variable
names
Type [in/out] Description
Addr string in ex:A,D,T,C
PlcNumber int in Plc number.
PlcType short out 0:byte, 1:short, 2:int
3:bool, 4:double,
5:string
6:sbyte
PlcDataByte byte out Plc data (byte)

Precision Machinery Research Development Center - Intelligent technology department
122
PlcDataShort short out Plc data (short)
PlcDataInt int out Plc data (int)
PlcDataBool bool out Plc data (bool)
PlcDataDouble double out Plc data (double)
PlcDataString string out Plc data (string)
PlcDataSByte sbyte out Plc data (sbyte)
Note ※ The addresses that FANUC Controller support:
G, F, Y, X, A, R, T, K, C, D, E
※ The addresses that MITSUBISHI Controller (M70/M700) support:
X, Y, M, F, L, SM, D, R, W, B, SB, V, SW, SD
※ The addresses that SYNTEC Controller support:
I, O, C, S, A, R
※ The addresses that LNC Controller support:
A, R, C, I, S, O
※ The addresses that ITRI Controller support:
I, O, C, S, A, B, Force I, Force O, Force C
※ The value gotten from PLC will be put into the array of
PlcData(B,S,I), if getting number failed, the array would be
set as -1.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O O O ? O
LNC ITRI
O O
C# Sample _Pwd.ConnectionKey = "123";
StructMsg.plc_status2[] _plc_status2 = new
StructMsg.plc_status2[1];
_plc_status2[0].Addr = "W";
_plc_status2[0].PlcNumber = 9804;
DataTable dt = new DataTable();
dt.Columns.Add("PlcNumber", Type.GetType("System.Int32"));
dt.Columns.Add("PlcType", Type.GetType("System.Int16"));
dt.Columns.Add("PlcValue", Type.GetType("System.String"));
short ret = iRemoting.GET_plc_status2(_Pwd, ref _plc_status2);
if (ret == 0)
{
for (int i = 0; i <= _plc_status2.Length - 1; i++)
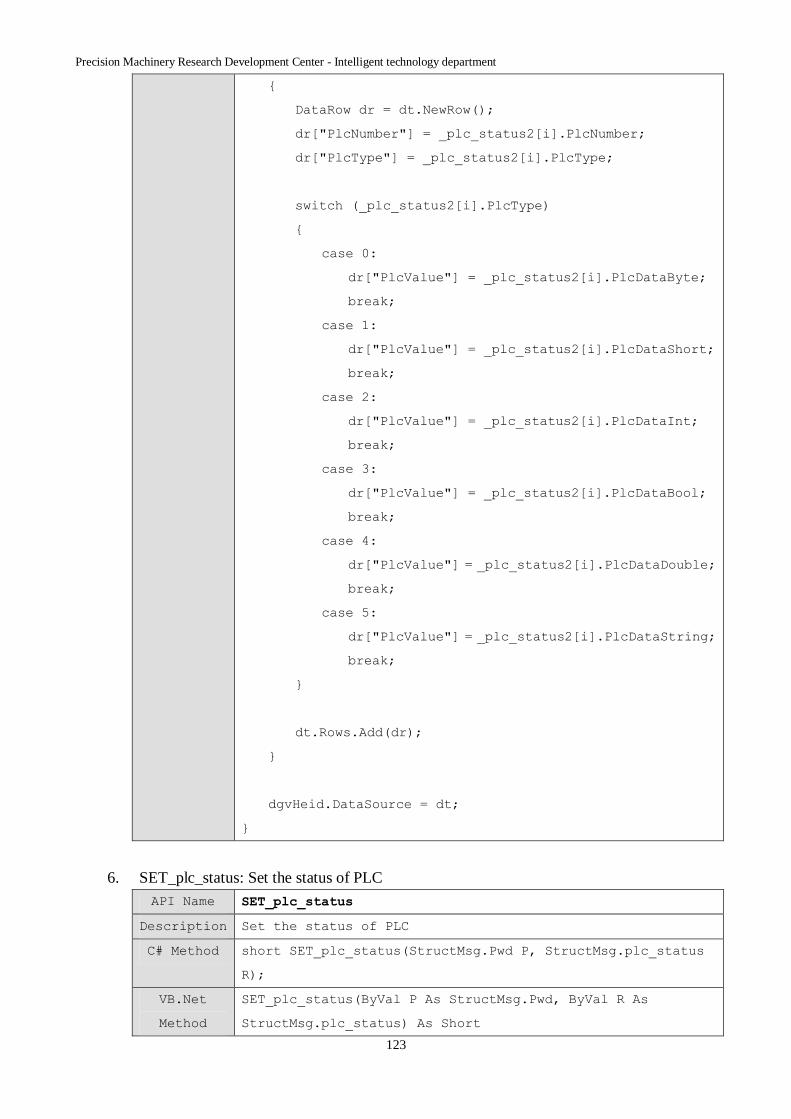
Precision Machinery Research Development Center - Intelligent technology department
123
{
DataRow dr = dt.NewRow();
dr["PlcNumber"] = _plc_status2[i].PlcNumber;
dr["PlcType"] = _plc_status2[i].PlcType;
switch (_plc_status2[i].PlcType)
{
case 0:
dr["PlcValue"] = _plc_status2[i].PlcDataByte;
break;
case 1:
dr["PlcValue"] = _plc_status2[i].PlcDataShort;
break;
case 2:
dr["PlcValue"] = _plc_status2[i].PlcDataInt;
break;
case 3:
dr["PlcValue"] = _plc_status2[i].PlcDataBool;
break;
case 4:
dr["PlcValue"] = _plc_status2[i].PlcDataDouble;
break;
case 5:
dr["PlcValue"] = _plc_status2[i].PlcDataString;
break;
}
dt.Rows.Add(dr);
}
dgvHeid.DataSource = dt;
}
6. SET_plc_status: Set the status of PLC
API Name SET_plc_status
Description Set the status of PLC
C# Method short SET_plc_status(StructMsg.Pwd P, StructMsg.plc_status
R);
VB.Net
Method
SET_plc_status(ByVal P As StructMsg.Pwd, ByVal R As
StructMsg.plc_status) As Short

Precision Machinery Research Development Center - Intelligent technology department
124
Data
Structure
Structure name: plc_status
Variable
names
Type [in/out] Description
Addr string in ex:A,D,T,C
PlcStart int in Start value of Address
PlcEnd int in End value of Address
PlcType short in 0:byte, 1:short, 2:int
PlcDataB byte[] in PLC data (byte)
PlcDataS short[] in PLC data (short)
PlcDataI int[] in PLC data (int)
Note ※ The addresses that FANUC Controllers support:
G, F, Y, X, A, R, T, K, C, D, E
※ FANUC Controllers accept only byteType, so please set PlcType
as 0 and put the data into the variable “PlcDataB”.
※ The addressses that MITSUBISHI Controllers support:
X, Y, M, F, L, SM, D, R, W, B, SB, V, SW, SD
※ The addresses that SYNTEC Controller support:
I, O, C, S, A, R
※ The addresses that LNC Controller support:
A, R, C, I, S, O
※ The addresses that ITRI Controller support:
I, O, C, S, A, B, Force I, Force O, Force C
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? ? ? O
LNC ITRI
O O
C# Sample StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_plc_status.Addr = "D";
_plc_status.PlcStart = 15;
_plc_status.PlcEnd = 20;
_plc_status.PlcType = 0;
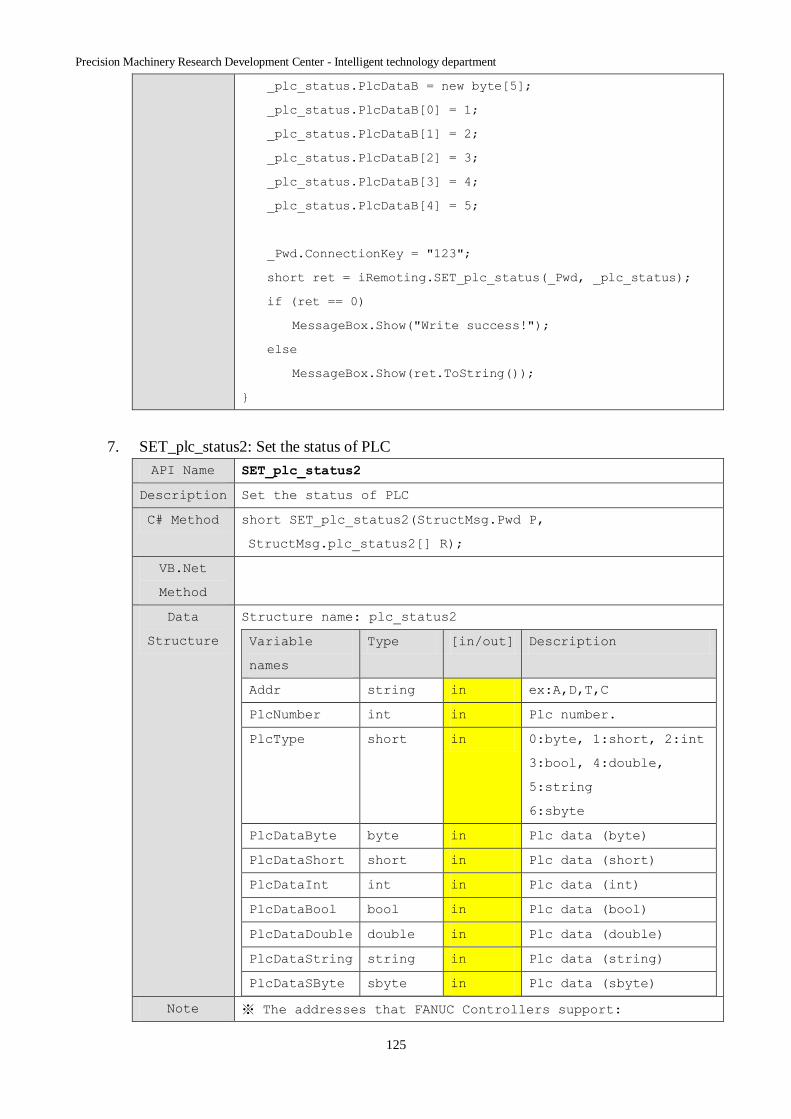
Precision Machinery Research Development Center - Intelligent technology department
125
_plc_status.PlcDataB = new byte[5];
_plc_status.PlcDataB[0] = 1;
_plc_status.PlcDataB[1] = 2;
_plc_status.PlcDataB[2] = 3;
_plc_status.PlcDataB[3] = 4;
_plc_status.PlcDataB[4] = 5;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SET_plc_status(_Pwd, _plc_status);
if (ret == 0)
MessageBox.Show("Write success!");
else
MessageBox.Show(ret.ToString());
}
7. SET_plc_status2: Set the status of PLC
API Name SET_plc_status2
Description Set the status of PLC
C# Method short SET_plc_status2(StructMsg.Pwd P,
StructMsg.plc_status2[] R);
VB.Net
Method
Data
Structure
Structure name: plc_status2
Variable
names
Type [in/out] Description
Addr string in ex:A,D,T,C
PlcNumber int in Plc number.
PlcType short in 0:byte, 1:short, 2:int
3:bool, 4:double,
5:string
6:sbyte
PlcDataByte byte in Plc data (byte)
PlcDataShort short in Plc data (short)
PlcDataInt int in Plc data (int)
PlcDataBool bool in Plc data (bool)
PlcDataDouble double in Plc data (double)
PlcDataString string in Plc data (string)
PlcDataSByte sbyte in Plc data (sbyte)
Note ※ The addresses that FANUC Controllers support:
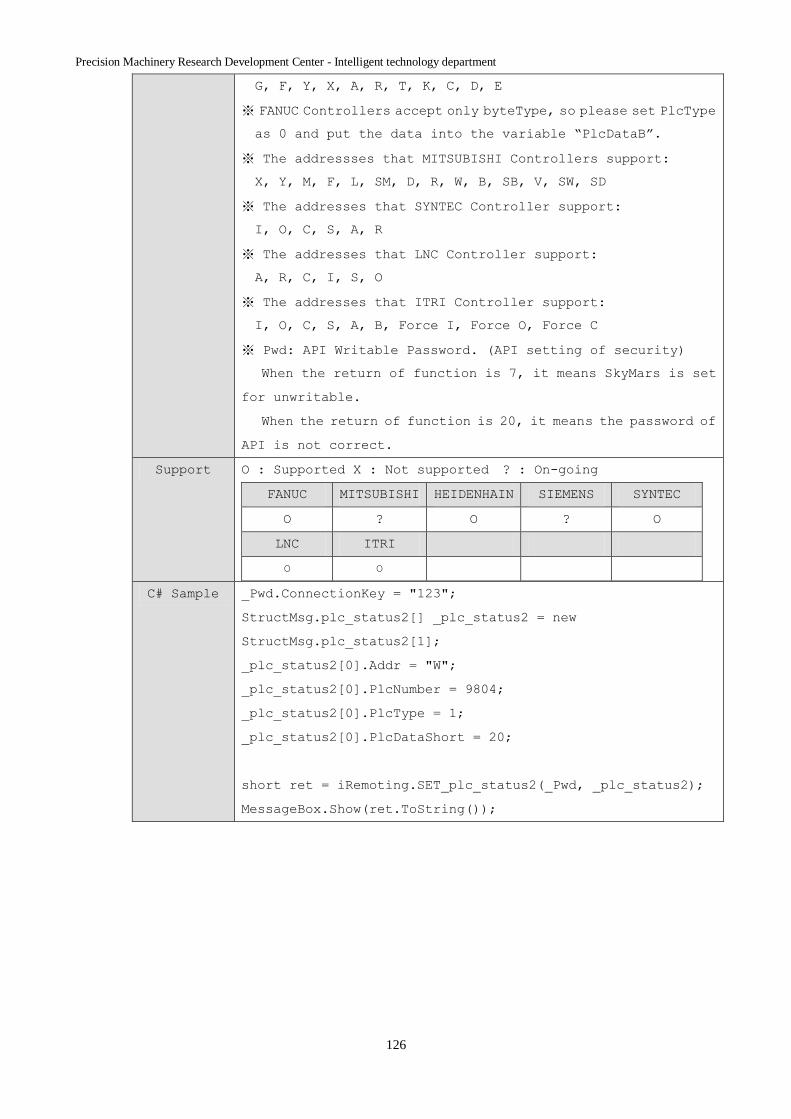
Precision Machinery Research Development Center - Intelligent technology department
126
G, F, Y, X, A, R, T, K, C, D, E
※ FANUC Controllers accept only byteType, so please set PlcType
as 0 and put the data into the variable “PlcDataB”.
※ The addressses that MITSUBISHI Controllers support:
X, Y, M, F, L, SM, D, R, W, B, SB, V, SW, SD
※ The addresses that SYNTEC Controller support:
I, O, C, S, A, R
※ The addresses that LNC Controller support:
A, R, C, I, S, O
※ The addresses that ITRI Controller support:
I, O, C, S, A, B, Force I, Force O, Force C
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
O ? O ? O
LNC ITRI
O O
C# Sample _Pwd.ConnectionKey = "123";
StructMsg.plc_status2[] _plc_status2 = new
StructMsg.plc_status2[1];
_plc_status2[0].Addr = "W";
_plc_status2[0].PlcNumber = 9804;
_plc_status2[0].PlcType = 1;
_plc_status2[0].PlcDataShort = 20;
short ret = iRemoting.SET_plc_status2(_Pwd, _plc_status2);
MessageBox.Show(ret.ToString());
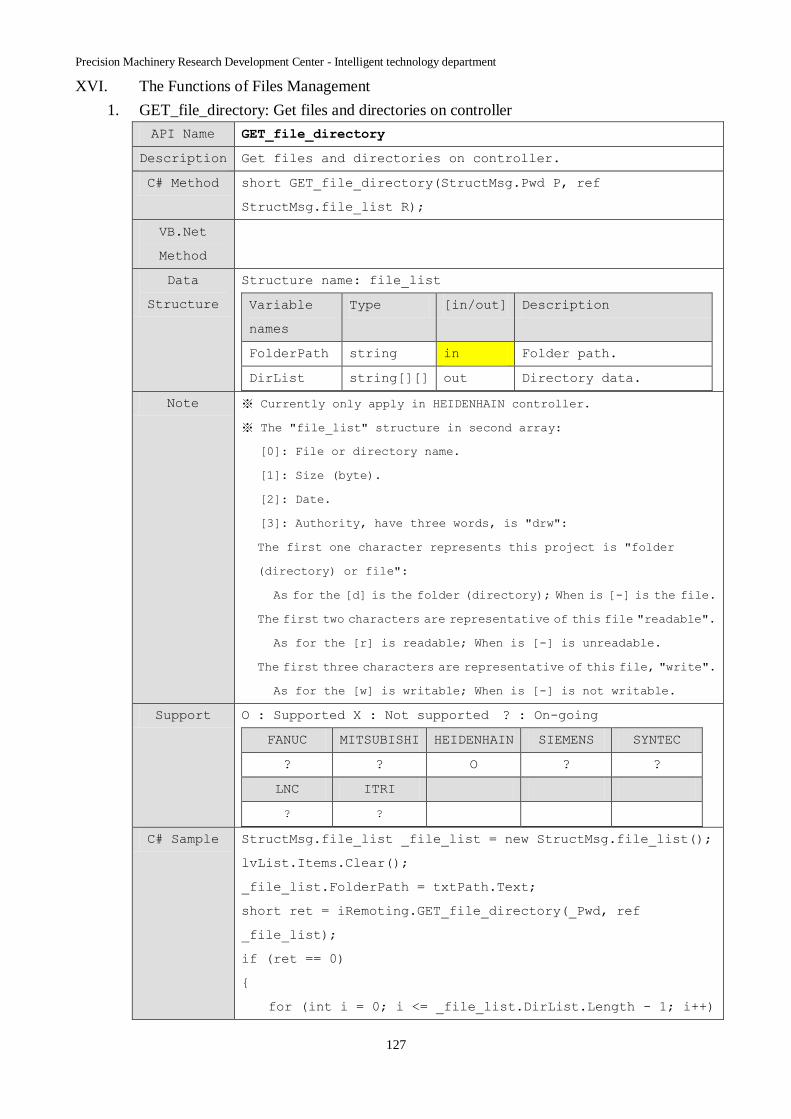
Precision Machinery Research Development Center - Intelligent technology department
127
XVI. The Functions of Files Management
1. GET_file_directory: Get files and directories on controller
API Name GET_file_directory
Description Get files and directories on controller.
C# Method short GET_file_directory(StructMsg.Pwd P, ref
StructMsg.file_list R);
VB.Net
Method
Data
Structure
Structure name: file_list
Variable
names
Type [in/out] Description
FolderPath string in Folder path.
DirList string[][] out Directory data.
Note ※ Currently only apply in HEIDENHAIN controller.
※ The "file_list" structure in second array:
[0]: File or directory name.
[1]: Size (byte).
[2]: Date.
[3]: Authority, have three words, is "drw":
The first one character represents this project is "folder
(directory) or file":
As for the [d] is the folder (directory); When is [-] is the file.
The first two characters are representative of this file "readable".
As for the [r] is readable; When is [-] is unreadable.
The first three characters are representative of this file, "write".
As for the [w] is writable; When is [-] is not writable.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
? ? O ? ?
LNC ITRI
? ?
C# Sample StructMsg.file_list _file_list = new StructMsg.file_list();
lvList.Items.Clear();
_file_list.FolderPath = txtPath.Text;
short ret = iRemoting.GET_file_directory(_Pwd, ref
_file_list);
if (ret == 0)
{
for (int i = 0; i <= _file_list.DirList.Length - 1; i++)

Precision Machinery Research Development Center - Intelligent technology department
128
{
ListViewItem item = new
ListViewItem(_file_list.DirList[i][0]);
item.SubItems.Add(_file_list.DirList[i][1]);
item.SubItems.Add(_file_list.DirList[i][2]);
item.SubItems.Add(_file_list.DirList[i][3]);
lvList.Items.Add(item);
}
}
2. UPLOAD_file2: Upload file from PC side to controller
API Name UPLOAD_file2
Description Upload file from PC side to controller.
C# Method short UPLOAD_file2(StructMsg.Pwd P, StructMsg.file_path2 R);
VB.Net
Method
Data
Structure
Structure name: file_list
Variable
names
Type [in/out] Description
FileContent byte[] in Upload file from PC side.
DestFile string in File path and file name
in controller.
Note ※ Currently only apply in HEIDENHAIN controller.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
? ? O ? ?
LNC ITRI
? ?
C# Sample StructMsg.file_path _file_path = new StructMsg.file_path();
_file_path.SourceFile = openFileDialog1.FileName;
_file_path.DestFile = txtPath.Text + "\\" +
openFileDialog1.SafeFileName;
short ret = iRemoting.UPLOAD_file(_Pwd, _file_path);
3. DOWNLOAD_file2: Download file from controller side to PC side
API Name DOWNLOAD_file2
Description Download file from controller side to PC side.
C# Method short UPLOAD_file2(StructMsg.Pwd P, StructMsg.file_path2 R);
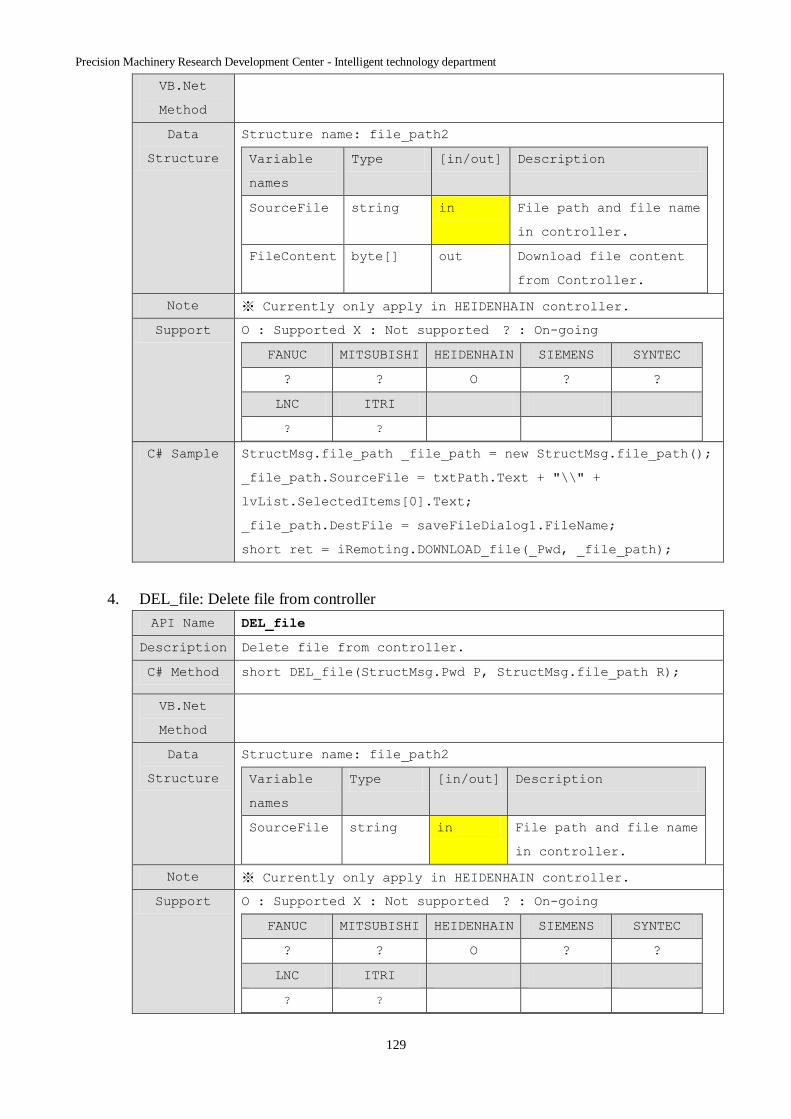
Precision Machinery Research Development Center - Intelligent technology department
129
VB.Net
Method
Data
Structure
Structure name: file_path2
Variable
names
Type [in/out] Description
SourceFile string in File path and file name
in controller.
FileContent byte[] out Download file content
from Controller.
Note ※ Currently only apply in HEIDENHAIN controller.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
? ? O ? ?
LNC ITRI
? ?
C# Sample StructMsg.file_path _file_path = new StructMsg.file_path();
_file_path.SourceFile = txtPath.Text + "\\" +
lvList.SelectedItems[0].Text;
_file_path.DestFile = saveFileDialog1.FileName;
short ret = iRemoting.DOWNLOAD_file(_Pwd, _file_path);
4. DEL_file: Delete file from controller
API Name DEL_file
Description Delete file from controller.
C# Method short DEL_file(StructMsg.Pwd P, StructMsg.file_path R);
VB.Net
Method
Data
Structure
Structure name: file_path2
Variable
names
Type [in/out] Description
SourceFile string in File path and file name
in controller.
Note ※ Currently only apply in HEIDENHAIN controller.
Support O : Supported X : Not supported ? : On-going
FANUC MITSUBISHI HEIDENHAIN SIEMENS SYNTEC
? ? O ? ?
LNC ITRI
? ?

Precision Machinery Research Development Center - Intelligent technology department
130
C# Sample StructMsg.file_path _file_path = new StructMsg.file_path();
_file_path.SourceFile = txtPath.Text + "\\" +
lvList.SelectedItems[0].Text;
short ret = iRemoting.DEL_file(_Pwd, _file_path);
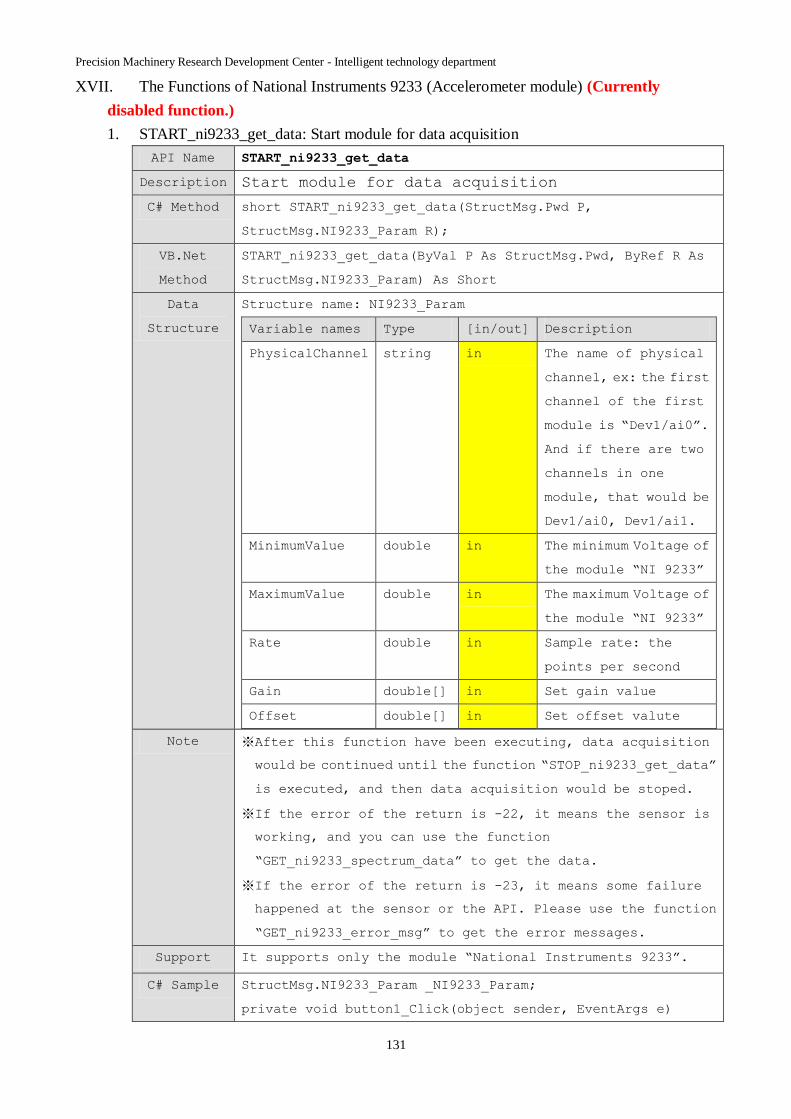
Precision Machinery Research Development Center - Intelligent technology department
131
XVII. The Functions of National Instruments 9233 (Accelerometer module) (Currently
disabled function.)
1. START_ni9233_get_data: Start module for data acquisition
API Name START_ni9233_get_data
Description Start module for data acquisition
C# Method short START_ni9233_get_data(StructMsg.Pwd P,
StructMsg.NI9233_Param R);
VB.Net
Method
START_ni9233_get_data(ByVal P As StructMsg.Pwd, ByRef R As
StructMsg.NI9233_Param) As Short
Data
Structure
Structure name: NI9233_Param
Variable names Type [in/out] Description
PhysicalChannel string in The name of physical
channel, ex: the first
channel of the first
module is “Dev1/ai0”.
And if there are two
channels in one
module, that would be
Dev1/ai0, Dev1/ai1.
MinimumValue double in The minimum Voltage of
the module “NI 9233”
MaximumValue double in The maximum Voltage of
the module “NI 9233”
Rate double in Sample rate: the
points per second
Gain double[] in Set gain value
Offset double[] in Set offset valute
Note ※After this function have been executing, data acquisition
would be continued until the function “STOP_ni9233_get_data”
is executed, and then data acquisition would be stoped.
※If the error of the return is -22, it means the sensor is
working, and you can use the function
“GET_ni9233_spectrum_data” to get the data.
※If the error of the return is -23, it means some failure
happened at the sensor or the API. Please use the function
“GET_ni9233_error_msg” to get the error messages.
Support It supports only the module “National Instruments 9233”.
C# Sample StructMsg.NI9233_Param _NI9233_Param;
private void button1_Click(object sender, EventArgs e)

Precision Machinery Research Development Center - Intelligent technology department
132
{
if (iRemoting.CHECK_ni9233_running() == false)
{
//Parameter setting
_NI9233_Param.PhysicalChannel =
"Dev1/ai0,Dev1/ai1,Dev1/ai2";
_NI9233_Param.MinimumValue = -5;
_NI9233_Param.MaximumValue = 5;
_NI9233_Param.Rate = 100;
_NI9233_Param.SamplesPerChannel = 1000;
_NI9233_Param.Gain = new double[] { 10.208, 9.94,
10.352 };
_NI9233_Param.Offset = new double[] { 0, 0, 0 };
iRemoting.START_ni9233_get_data(_NI9233_Param);
}
else
{
//It is running
MessageBox.Show("It is running now.");
}
}
2. STOP_ni9233_get_data: Stop Data Acquisition
API Name STOP_ni9233_get_data
Description Stop data acquisition
C# Method void STOP_ni9233_get_data();
VB.Net
Method
STOP_ni9233_get_data()
Data
Structure
Note
Support It supports only the module “National Instruments 9233”.
C# Sample iRemoting.STOP_ni9233_get_data();
3. CHECK_ni9233_running: Check if DataAcquisition is running
API Name STOP_ni9233_get_data
Description Check if DataAcquisition is running
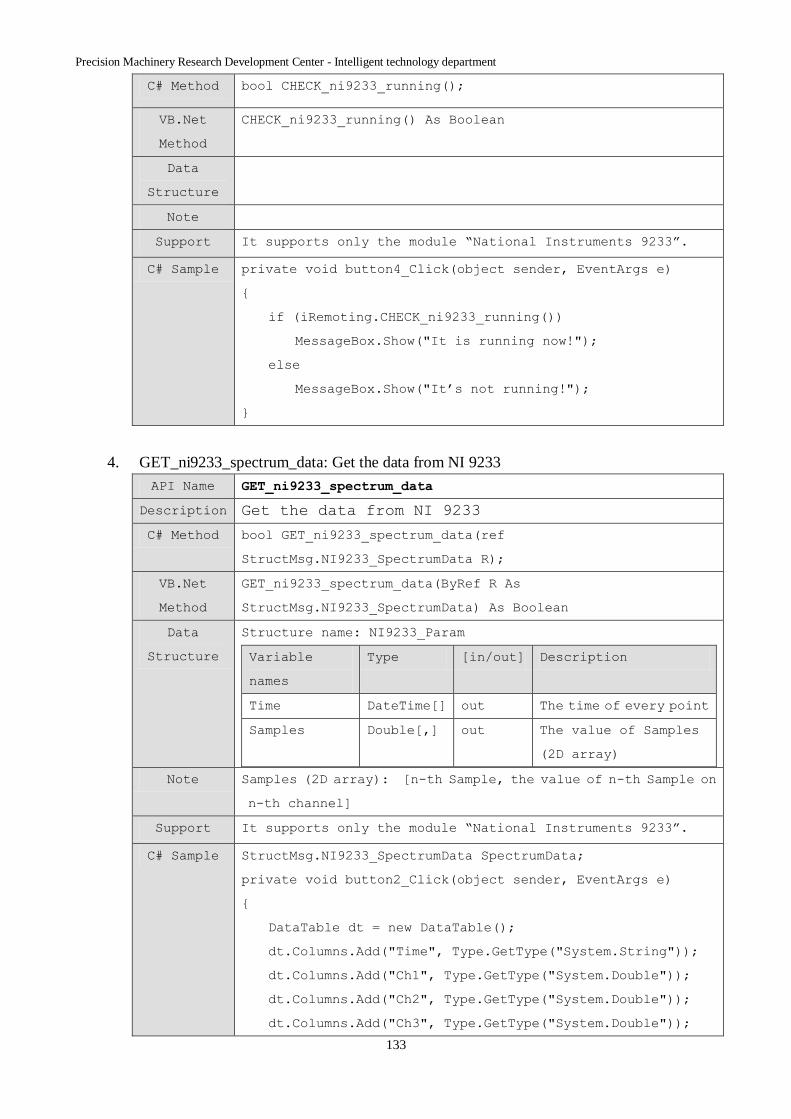
Precision Machinery Research Development Center - Intelligent technology department
133
C# Method bool CHECK_ni9233_running();
VB.Net
Method
CHECK_ni9233_running() As Boolean
Data
Structure
Note
Support It supports only the module “National Instruments 9233”.
C# Sample private void button4_Click(object sender, EventArgs e)
{
if (iRemoting.CHECK_ni9233_running())
MessageBox.Show("It is running now!");
else
MessageBox.Show("It’s not running!");
}
4. GET_ni9233_spectrum_data: Get the data from NI 9233
API Name GET_ni9233_spectrum_data
Description Get the data from NI 9233
C# Method bool GET_ni9233_spectrum_data(ref
StructMsg.NI9233_SpectrumData R);
VB.Net
Method
GET_ni9233_spectrum_data(ByRef R As
StructMsg.NI9233_SpectrumData) As Boolean
Data
Structure
Structure name: NI9233_Param
Variable
names
Type [in/out] Description
Time DateTime[] out The time of every point
Samples Double[,] out The value of Samples
(2D array)
Note Samples (2D array): [n-th Sample, the value of n-th Sample on
n-th channel]
Support It supports only the module “National Instruments 9233”.
C# Sample StructMsg.NI9233_SpectrumData SpectrumData;
private void button2_Click(object sender, EventArgs e)
{
DataTable dt = new DataTable();
dt.Columns.Add("Time", Type.GetType("System.String"));
dt.Columns.Add("Ch1", Type.GetType("System.Double"));
dt.Columns.Add("Ch2", Type.GetType("System.Double"));
dt.Columns.Add("Ch3", Type.GetType("System.Double"));
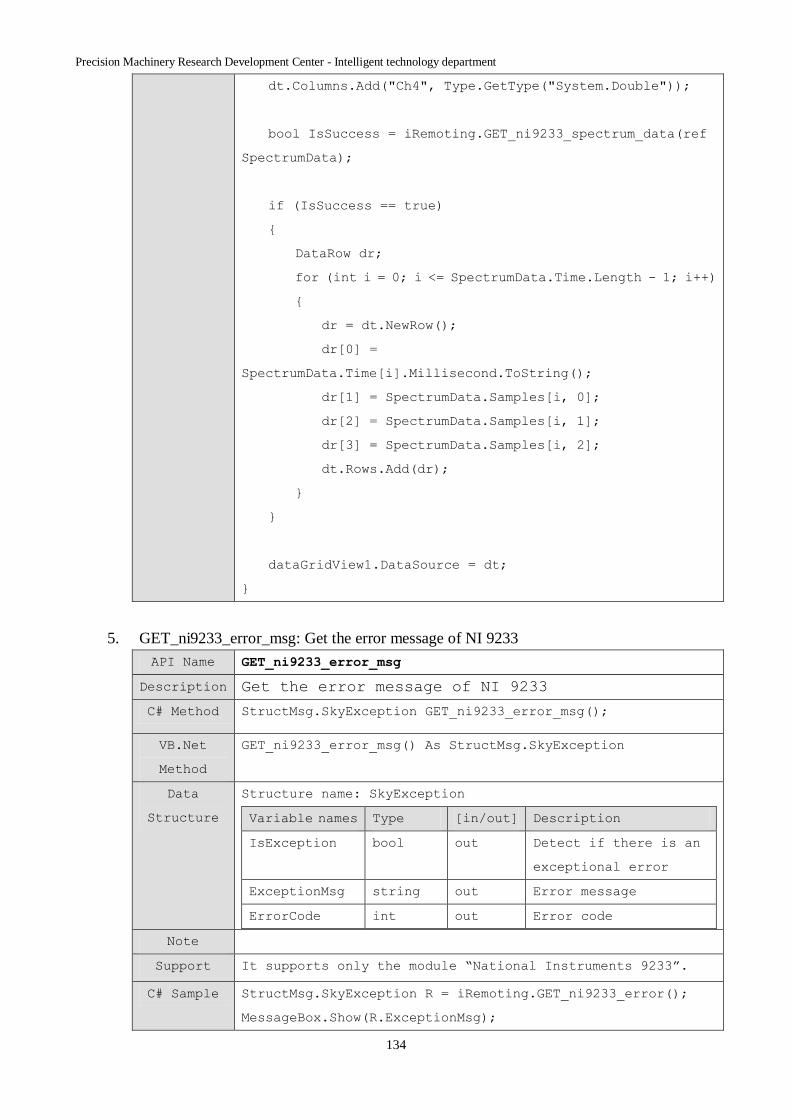
Precision Machinery Research Development Center - Intelligent technology department
134
dt.Columns.Add("Ch4", Type.GetType("System.Double"));
bool IsSuccess = iRemoting.GET_ni9233_spectrum_data(ref
SpectrumData);
if (IsSuccess == true)
{
DataRow dr;
for (int i = 0; i <= SpectrumData.Time.Length - 1; i++)
{
dr = dt.NewRow();
dr[0] =
SpectrumData.Time[i].Millisecond.ToString();
dr[1] = SpectrumData.Samples[i, 0];
dr[2] = SpectrumData.Samples[i, 1];
dr[3] = SpectrumData.Samples[i, 2];
dt.Rows.Add(dr);
}
}
dataGridView1.DataSource = dt;
}
5. GET_ni9233_error_msg: Get the error message of NI 9233
API Name GET_ni9233_error_msg
Description Get the error message of NI 9233
C# Method StructMsg.SkyException GET_ni9233_error_msg();
VB.Net
Method
GET_ni9233_error_msg() As StructMsg.SkyException
Data
Structure
Structure name: SkyException
Variable names Type [in/out] Description
IsException bool out Detect if there is an
exceptional error
ExceptionMsg string out Error message
ErrorCode int out Error code
Note
Support It supports only the module “National Instruments 9233”.
C# Sample StructMsg.SkyException R = iRemoting.GET_ni9233_error();
MessageBox.Show(R.ExceptionMsg);

Precision Machinery Research Development Center - Intelligent technology department
135
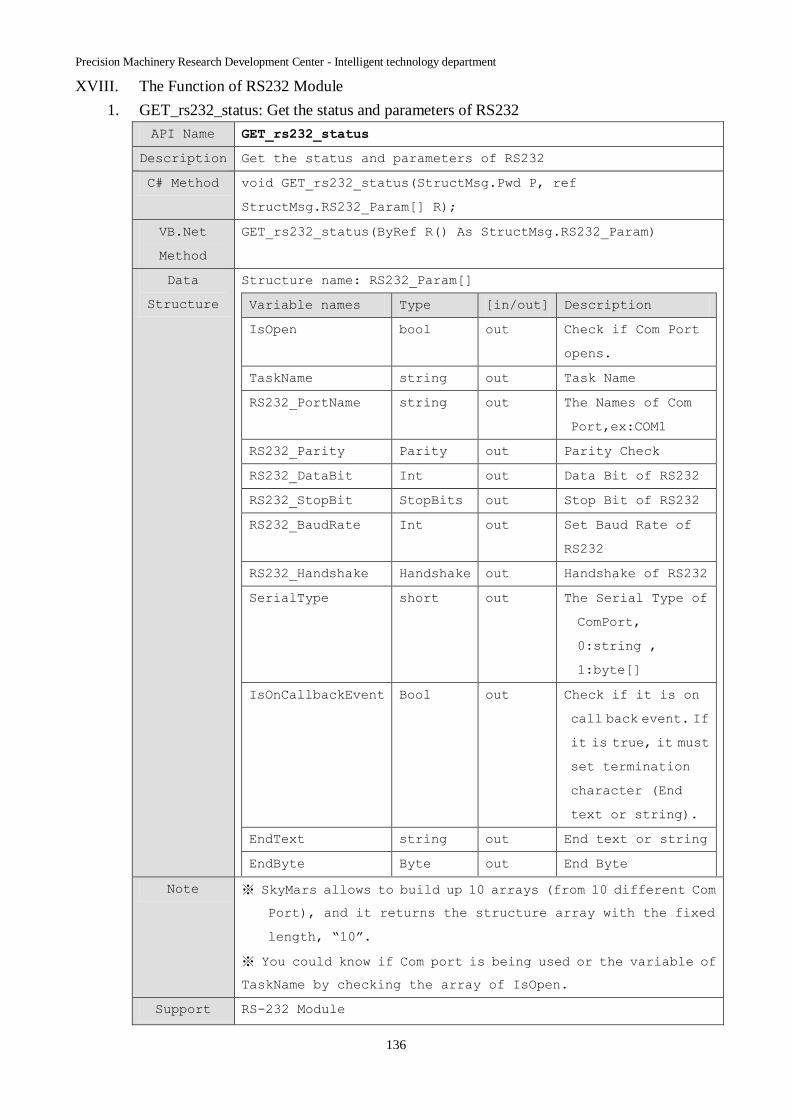
Precision Machinery Research Development Center - Intelligent technology department
136
XVIII. The Function of RS232 Module
1. GET_rs232_status: Get the status and parameters of RS232
API Name GET_rs232_status
Description Get the status and parameters of RS232
C# Method void GET_rs232_status(StructMsg.Pwd P, ref
StructMsg.RS232_Param[] R);
VB.Net
Method
GET_rs232_status(ByRef R() As StructMsg.RS232_Param)
Data
Structure
Structure name: RS232_Param[]
Variable names Type [in/out] Description
IsOpen bool out Check if Com Port
opens.
TaskName string out Task Name
RS232_PortName string out The Names of Com
Port,ex:COM1
RS232_Parity Parity out Parity Check
RS232_DataBit Int out Data Bit of RS232
RS232_StopBit StopBits out Stop Bit of RS232
RS232_BaudRate Int out Set Baud Rate of
RS232
RS232_Handshake Handshake out Handshake of RS232
SerialType short out The Serial Type of
ComPort,
0:string ,
1:byte[]
IsOnCallbackEvent Bool out Check if it is on
call back event. If
it is true, it must
set termination
character (End
text or string).
EndText string out End text or string
EndByte Byte out End Byte
Note ※ SkyMars allows to build up 10 arrays (from 10 different Com
Port), and it returns the structure array with the fixed
length, “10”.
※ You could know if Com port is being used or the variable of
TaskName by checking the array of IsOpen.
Support RS-232 Module
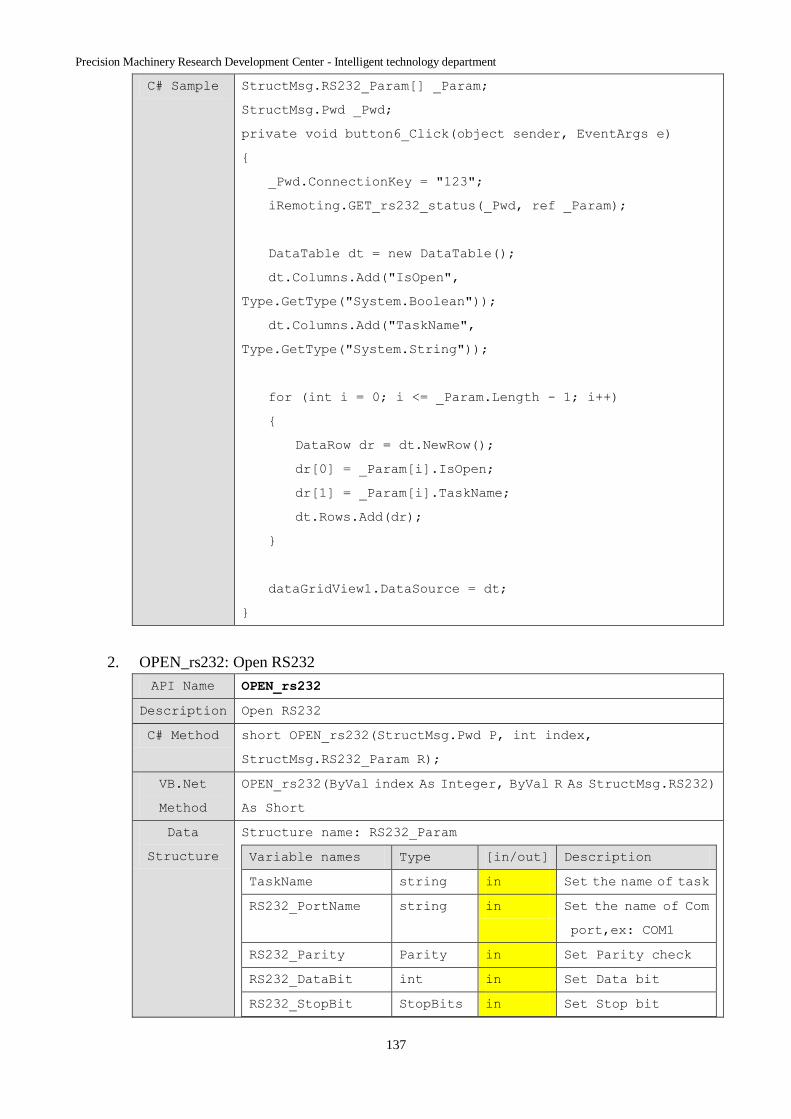
Precision Machinery Research Development Center - Intelligent technology department
137
C# Sample StructMsg.RS232_Param[] _Param;
StructMsg.Pwd _Pwd;
private void button6_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
iRemoting.GET_rs232_status(_Pwd, ref _Param);
DataTable dt = new DataTable();
dt.Columns.Add("IsOpen",
Type.GetType("System.Boolean"));
dt.Columns.Add("TaskName",
Type.GetType("System.String"));
for (int i = 0; i <= _Param.Length - 1; i++)
{
DataRow dr = dt.NewRow();
dr[0] = _Param[i].IsOpen;
dr[1] = _Param[i].TaskName;
dt.Rows.Add(dr);
}
dataGridView1.DataSource = dt;
}
2. OPEN_rs232: Open RS232
API Name OPEN_rs232
Description Open RS232
C# Method short OPEN_rs232(StructMsg.Pwd P, int index,
StructMsg.RS232_Param R);
VB.Net
Method
OPEN_rs232(ByVal index As Integer, ByVal R As StructMsg.RS232)
As Short
Data
Structure
Structure name: RS232_Param
Variable names Type [in/out] Description
TaskName string in Set the name of task
RS232_PortName string in Set the name of Com
port,ex: COM1
RS232_Parity Parity in Set Parity check
RS232_DataBit int in Set Data bit
RS232_StopBit StopBits in Set Stop bit
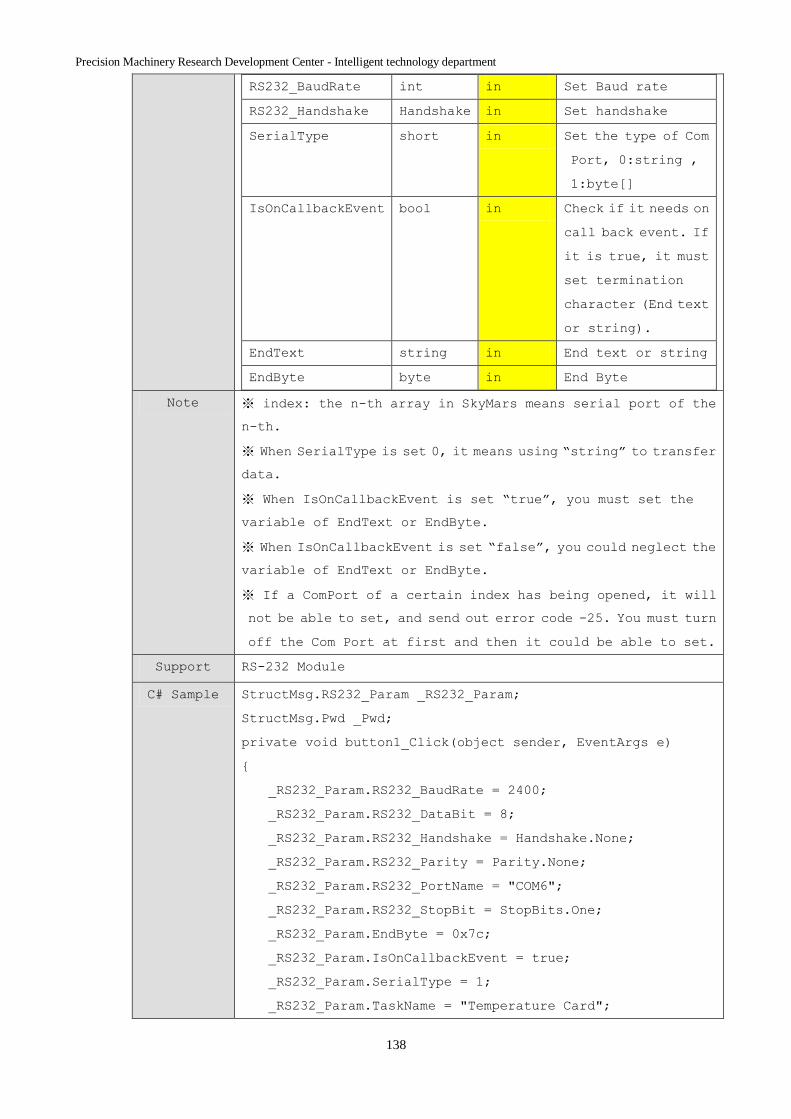
Precision Machinery Research Development Center - Intelligent technology department
138
RS232_BaudRate int in Set Baud rate
RS232_Handshake Handshake in Set handshake
SerialType short in Set the type of Com
Port, 0:string ,
1:byte[]
IsOnCallbackEvent bool in Check if it needs on
call back event. If
it is true, it must
set termination
character (End text
or string).
EndText string in End text or string
EndByte byte in End Byte
Note ※ index: the n-th array in SkyMars means serial port of the
n-th.
※ When SerialType is set 0, it means using “string” to transfer
data.
※ When IsOnCallbackEvent is set “true”, you must set the
variable of EndText or EndByte.
※ When IsOnCallbackEvent is set “false”, you could neglect the
variable of EndText or EndByte.
※ If a ComPort of a certain index has being opened, it will
not be able to set, and send out error code -25. You must turn
off the Com Port at first and then it could be able to set.
Support RS-232 Module
C# Sample StructMsg.RS232_Param _RS232_Param;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_RS232_Param.RS232_BaudRate = 2400;
_RS232_Param.RS232_DataBit = 8;
_RS232_Param.RS232_Handshake = Handshake.None;
_RS232_Param.RS232_Parity = Parity.None;
_RS232_Param.RS232_PortName = "COM6";
_RS232_Param.RS232_StopBit = StopBits.One;
_RS232_Param.EndByte = 0x7c;
_RS232_Param.IsOnCallbackEvent = true;
_RS232_Param.SerialType = 1;
_RS232_Param.TaskName = "Temperature Card";

Precision Machinery Research Development Center - Intelligent technology department
139
_Pwd.ConnectionKey = "123";
short ret = iRemoting.OPEN_rs232(_Pwd, 0, _RS232_Param);
MessageBox.Show(ret.ToString());
}
3. SET_rs232: Set data into RS232
API Name SET_rs232
Description Set data into RS232
C# Method short SET_rs232(StructMsg.Pwd P, int index,
StructMsg.RS232_Data R);
VB.Net
Method
SET_rs232(ByVal P As StructMsg.Pwd, ByVal index As
Integer,ByVal R As StructMsg.RS232_Data) As Short
Data
Structure
Structure name: RS232_Data
Variable names Type [in/out] Description
Text string in Set string
ArrayByte byte[] in Set array byte
Note ※ index: the n-th array in SkyMars means the Com Port of n-th.
※ As for selecting the variable of “Text” or “ArrayByte”, please
refer to “SerialType” in the function “OPEN_rs232” before.
Ex: SerialType=0, please set variable “Text” and neglect
“ArrayByte”.
If SerialType=1, please set variable “ArrayByte” and neglect
“Text”.
※ Pwd: API Writable Password. (API setting of security)
When the return of function is 7, it means SkyMars is set
for unwritable.
When the return of function is 20, it means the password of
API is not correct.
Support RS-232 Module
C# Sample StructMsg.RS232_Data _RS232_Data;
StructMsg.Pwd _Pwd;
private void button2_Click(object sender, EventArgs e)
{
byte[] wrCmd = { 0x05, 0x05, 0x05, 0x37 };
_RS232_Data.ArrayByte = wrCmd;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.SET_rs232(_Pwd, 0, _RS232_Data);
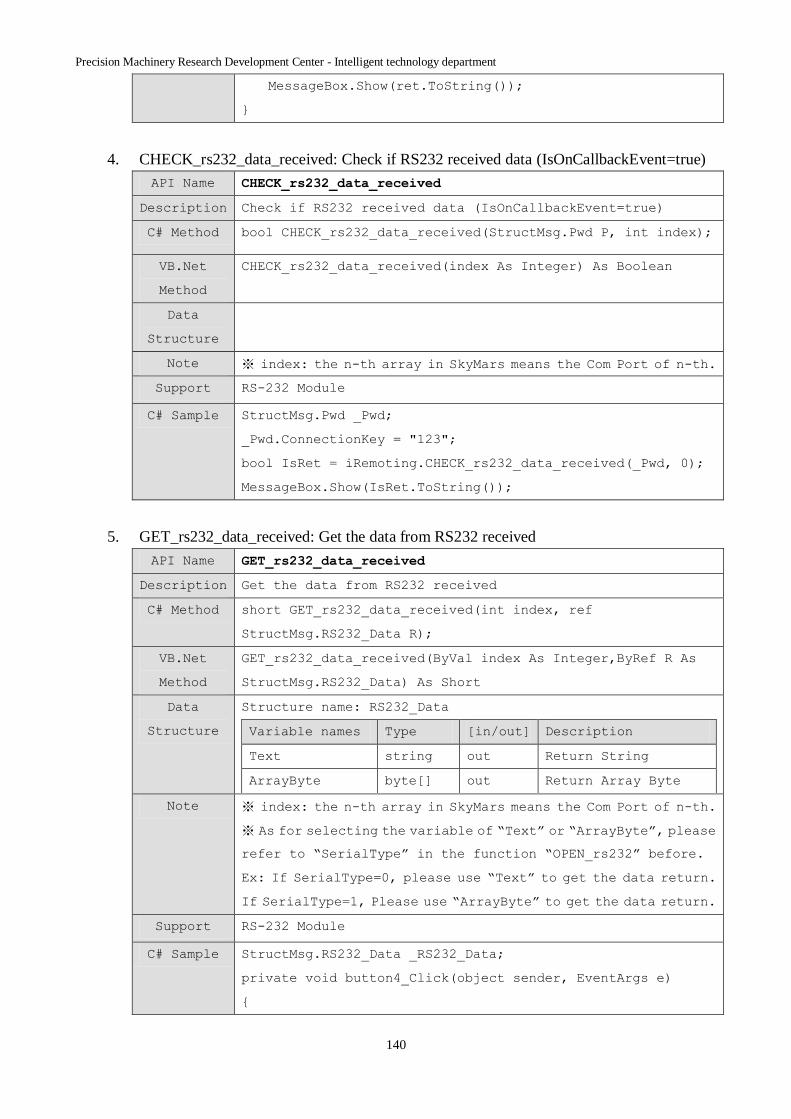
Precision Machinery Research Development Center - Intelligent technology department
140
MessageBox.Show(ret.ToString());
}
4. CHECK_rs232_data_received: Check if RS232 received data (IsOnCallbackEvent=true)
API Name CHECK_rs232_data_received
Description Check if RS232 received data (IsOnCallbackEvent=true)
C# Method bool CHECK_rs232_data_received(StructMsg.Pwd P, int index);
VB.Net
Method
CHECK_rs232_data_received(index As Integer) As Boolean
Data
Structure
Note ※ index: the n-th array in SkyMars means the Com Port of n-th.
Support RS-232 Module
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
bool IsRet = iRemoting.CHECK_rs232_data_received(_Pwd, 0);
MessageBox.Show(IsRet.ToString());
5. GET_rs232_data_received: Get the data from RS232 received
API Name GET_rs232_data_received
Description Get the data from RS232 received
C# Method short GET_rs232_data_received(int index, ref
StructMsg.RS232_Data R);
VB.Net
Method
GET_rs232_data_received(ByVal index As Integer,ByRef R As
StructMsg.RS232_Data) As Short
Data
Structure
Structure name: RS232_Data
Variable names Type [in/out] Description
Text string out Return String
ArrayByte byte[] out Return Array Byte
Note ※ index: the n-th array in SkyMars means the Com Port of n-th.
※ As for selecting the variable of “Text” or “ArrayByte”, please
refer to “SerialType” in the function “OPEN_rs232” before.
Ex: If SerialType=0, please use “Text” to get the data return.
If SerialType=1, Please use “ArrayByte” to get the data return.
Support RS-232 Module
C# Sample StructMsg.RS232_Data _RS232_Data;
private void button4_Click(object sender, EventArgs e)
{

Precision Machinery Research Development Center - Intelligent technology department
141
short ret = iRemoting.GET_rs232_data_received(0, ref
_RS232_Data);
byte[] readByte = _RS232_Data.ArrayByte;
}
6. CLOSE_rs232: Close RS232
API Name CLOSE_rs232
Description Close RS232
C# Method void CLOSE_rs232(StructMsg.Pwd P, int index);
VB.Net
Method
CLOSE_rs232(index As Integer)
Data
Structure
Note ※ index: the n-th array in SkyMars means the Com Port of n-th.
Support RS-232 Module
C# Sample StructMsg.RS232_Data _RS232_Data;
StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
iRemoting.CLOSE_rs232(_Pwd, 0);
7. GET_rs232_error_msg: Get the error message from RS-232
API Name GET_rs232_error_msg
Description Get the error message from RS-232
C# Method StructMsg.SkyException GET_rs232_error_msg(StructMsg.Pwd P,
int index);
VB.Net
Method
GET_rs232_error_msg(index As Integer) As
StructMsg.SkyException
Data
Structure
Structure name: SkyException
Variable names Type [in/out] Description
IsException bool out Check if there is any
error
ExceptionMsg string out Error message
ErrorCode int out Error code
Note
Support RS-232 Module
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
Precision Machinery Research Development Center - Intelligent technology department
142
StructMsg.SkyException R = iRemoting.GET_rs232_error(_Pwd,
0);
MessageBox.Show(R.ExceptionMsg +"\r\n" +
R.ErrorCode.ToString());
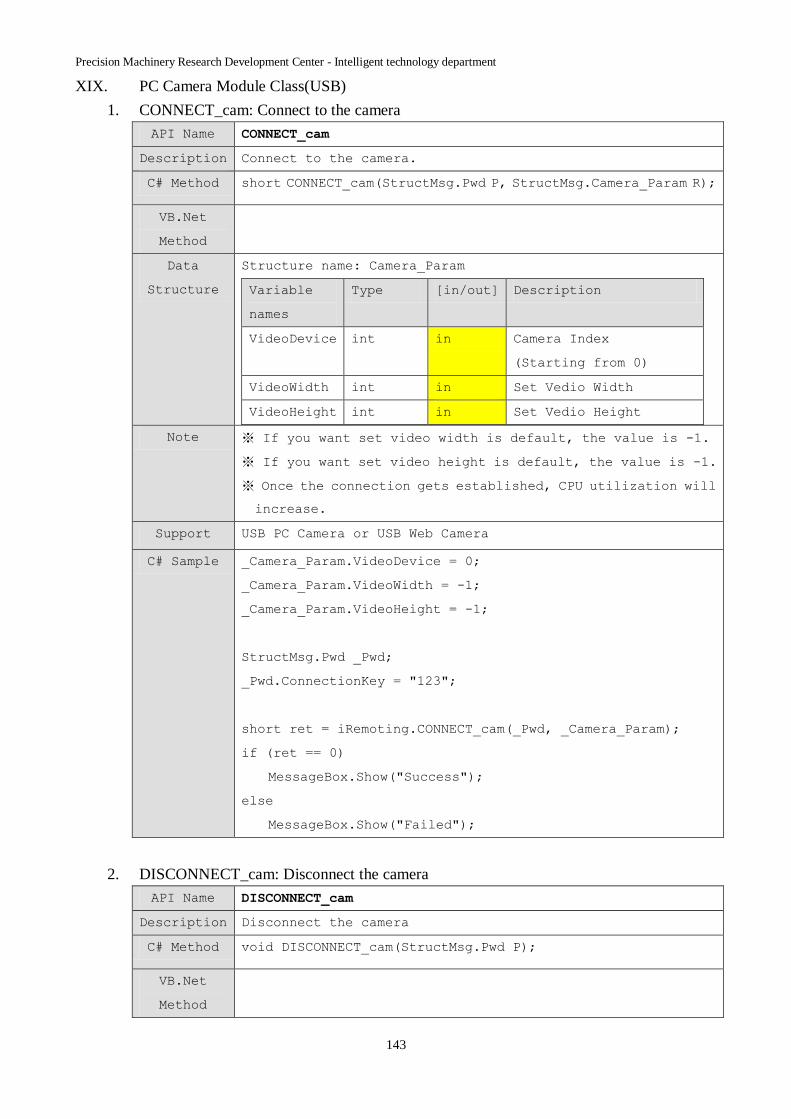
Precision Machinery Research Development Center - Intelligent technology department
143
XIX. PC Camera Module Class(USB)
1. CONNECT_cam: Connect to the camera
API Name CONNECT_cam
Description Connect to the camera.
C# Method short CONNECT_cam(StructMsg.Pwd P, StructMsg.Camera_Param R);
VB.Net
Method
Data
Structure
Structure name: Camera_Param
Variable
names
Type [in/out] Description
VideoDevice int in Camera Index
(Starting from 0)
VideoWidth int in Set Vedio Width
VideoHeight int in Set Vedio Height
Note ※ If you want set video width is default, the value is -1.
※ If you want set video height is default, the value is -1.
※ Once the connection gets established, CPU utilization will
increase.
Support USB PC Camera or USB Web Camera
C# Sample _Camera_Param.VideoDevice = 0;
_Camera_Param.VideoWidth = -1;
_Camera_Param.VideoHeight = -1;
StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.CONNECT_cam(_Pwd, _Camera_Param);
if (ret == 0)
MessageBox.Show("Success");
else
MessageBox.Show("Failed");
2. DISCONNECT_cam: Disconnect the camera
API Name DISCONNECT_cam
Description Disconnect the camera
C# Method void DISCONNECT_cam(StructMsg.Pwd P);
VB.Net
Method

Precision Machinery Research Development Center - Intelligent technology department
144
Data
Structure
Note
Support USB PC Camera or USB Web Camera
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
iRemoting.DISCONNECT_cam(_Pwd);
3. CHECK_cam_running: Check if the camera gets connected and ready to capture vedios
API Name CHECK_cam_running
Description Check if the camera gets connected and ready to capture vedios.
C# Method bool CHECK_cam_running(StructMsg.Pwd P);
VB.Net
Method
Data
Structure
Note
Support USB PC Camera or USB Web Camera
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
bool IsRunning = iRemoting.CHECK_cam_running();
if (IsRunning)
MessageBox.Show("The camera is capturing a vedio");
else
MessageBox.Show("The camera doesn’t get connected");
4. GET_cam_image: Get a image from the camera
API Name GET_cam_image
Description Get a image from the camera
C# Method short GET_cam_image(StructMsg.Pwd P, ref
StructMsg.Camera_Image R);
VB.Net
Method
Data
Structure
Structure name: Camera_Image
Variable name Type [in/out] Description
CamImage byte[] out Get the byte array of a
image
Note ※ The type of Vairable CamImage is Bitmap after transfering.

Precision Machinery Research Development Center - Intelligent technology department
145
Support USB PC Camera or USB Web Camera
C# Sample StructMsg.Camera_Image _Camera_Image;
StructMsg.Pwd _Pwd;
private void timer1_Tick(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_cam_image(_Pwd, ref
_Camera_Image);
if (ret == 0)
{
if (_Camera_Image.CamImage == null ||
_Camera_Image.CamImage.Length == 0) { return; }
//Image oImage = null;
Bitmap oBitmap = null;
using (MemoryStream oMemoryStream = new
MemoryStream(_Camera_Image.CamImage))
{
oMemoryStream.Position = 0;
oBitmap = new Bitmap(oMemoryStream);
//oBitmap =
System.Drawing.Bitmap.FromStream(oMemoryStream);
pictureBox1.Image = oBitmap;
}
}
}
5. GET_cam_error: Get exception error of the camera
API Name GET_cam_error
Description Get exception error of the camera
C# Method StructMsg.SkyException GET_cam_error(StructMsg.Pwd P);
VB.Net
Method
Data
Structure
Structure name: SkyException
Variable names Type [in/out] Description
IsException bool out Is exception or not
ExceptionMsg string out Error Message
ErrorCode int out Error Code
Note
Precision Machinery Research Development Center - Intelligent technology department
146
Support USB PC Camera or USB Web Camera
C# Sample StructMsg.Pwd _Pwd;
_Pwd.ConnectionKey = "123";
StructMsg.SkyException R = iRemoting.GET_cam_error(_Pwd);
MessageBox.Show(R.ExceptionMsg + "\r\n" +
R.ErrorCode.ToString());
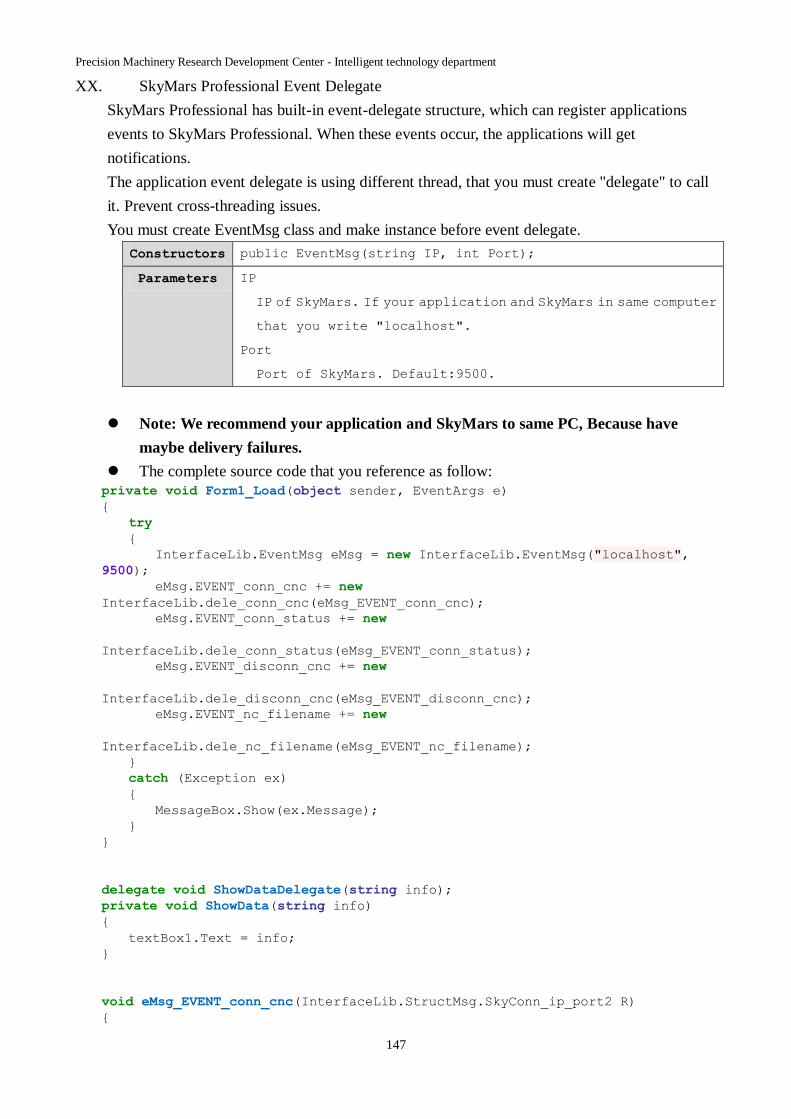
Precision Machinery Research Development Center - Intelligent technology department
147
XX. SkyMars Professional Event Delegate
SkyMars Professional has built-in event-delegate structure, which can register applications
events to SkyMars Professional. When these events occur, the applications will get
notifications.
The application event delegate is using different thread, that you must create "delegate" to call
it. Prevent cross-threading issues.
You must create EventMsg class and make instance before event delegate.
Constructors public EventMsg(string IP, int Port);
Parameters IP
IP of SkyMars. If your application and SkyMars in same computer
that you write "localhost".
Port
Port of SkyMars. Default:9500.
Note: We recommend your application and SkyMars to same PC, Because have
maybe delivery failures.
The complete source code that you reference as follow:
private void Form1_Load(object sender, EventArgs e)
{
try
{
InterfaceLib.EventMsg eMsg = new InterfaceLib.EventMsg("localhost",
9500);
eMsg.EVENT_conn_cnc += new
InterfaceLib.dele_conn_cnc(eMsg_EVENT_conn_cnc);
eMsg.EVENT_conn_status += new
InterfaceLib.dele_conn_status(eMsg_EVENT_conn_status);
eMsg.EVENT_disconn_cnc += new
InterfaceLib.dele_disconn_cnc(eMsg_EVENT_disconn_cnc);
eMsg.EVENT_nc_filename += new
InterfaceLib.dele_nc_filename(eMsg_EVENT_nc_filename);
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
delegate void ShowDataDelegate(string info);
private void ShowData(string info)
{
textBox1.Text = info;
}
void eMsg_EVENT_conn_cnc(InterfaceLib.StructMsg.SkyConn_ip_port2 R)
{

Precision Machinery Research Development Center - Intelligent technology department
148
ShowDataDelegate _ShowDataDelegate = new ShowDataDelegate(ShowData);
this.BeginInvoke(_ShowDataDelegate, new object[] { R.MachineNo + "," +
R.MachineName + "," + R.Manufacturer });
}
void eMsg_EVENT_disconn_cnc(bool IsExitSkyMars)
{
if (IsExitSkyMars == false)
{
ShowDataDelegate _ShowDataDelegate = new ShowDataDelegate(ShowData);
this.BeginInvoke(_ShowDataDelegate, new object[] { "Power OFF of CNC" });
}
else
{
this.Close();
}
}
void eMsg_EVENT_conn_status(InterfaceLib.StructMsg.SkyConn_status2 R)
{
ShowDataDelegate _ShowDataDelegate = new ShowDataDelegate(ShowData);
this.BeginInvoke(_ShowDataDelegate, new object[] { R.MachineNo + "," +
R.Status });
}
void eMsg_EVENT_nc_filename(InterfaceLib.StructMsg.SkyNc_filename2 R)
{
ShowDataDelegate _ShowDataDelegate = new ShowDataDelegate(ShowData);
this.BeginInvoke(_ShowDataDelegate, new object[] { R.MachineNo + "," +
R.MainProg
+ ", " + R.SubProg });
}
1. EVENT_conn_cnc: Create an event happened after setting CNC info through SkyMars
Professional
API Name EVENT_conn_cnc
Description Create an event happened after setting CNC info through SkyMars
Professional.
C# Method event EventHandler_conn_cnc EVENT_conn_cnc;
VB.Net
Method
Data
Structure
Structure name: SkyConn_ip_port2
Variable Name Type [in/out] Description
MachineNo int out Machine Index
MachineName string out Machine Name
IP string out Machine IP
Port short out Machine Port
Manufacturer string out Machine Brand
PlugInPort int out Plug-In Port
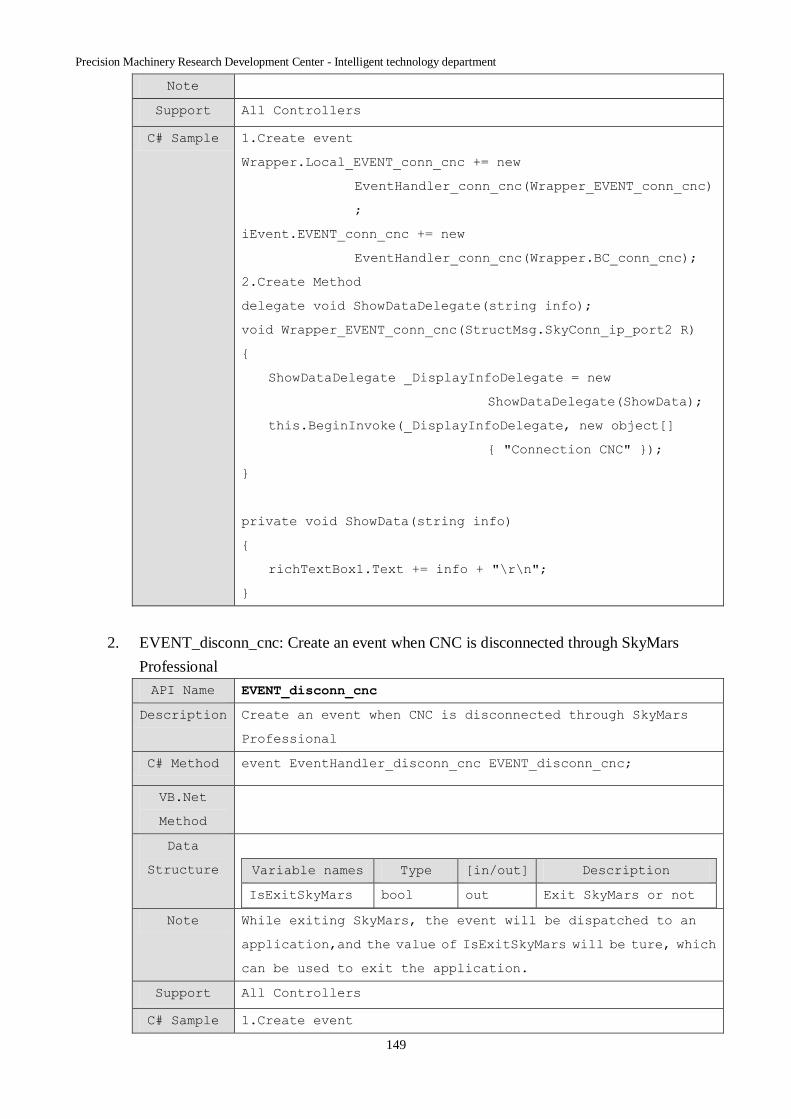
Precision Machinery Research Development Center - Intelligent technology department
149
Note
Support All Controllers
C# Sample 1.Create event
Wrapper.Local_EVENT_conn_cnc += new
EventHandler_conn_cnc(Wrapper_EVENT_conn_cnc)
;
iEvent.EVENT_conn_cnc += new
EventHandler_conn_cnc(Wrapper.BC_conn_cnc);
2.Create Method
delegate void ShowDataDelegate(string info);
void Wrapper_EVENT_conn_cnc(StructMsg.SkyConn_ip_port2 R)
{
ShowDataDelegate _DisplayInfoDelegate = new
ShowDataDelegate(ShowData);
this.BeginInvoke(_DisplayInfoDelegate, new object[]
{ "Connection CNC" });
}
private void ShowData(string info)
{
richTextBox1.Text += info + "\r\n";
}
2. EVENT_disconn_cnc: Create an event when CNC is disconnected through SkyMars
Professional
API Name EVENT_disconn_cnc
Description Create an event when CNC is disconnected through SkyMars
Professional
C# Method event EventHandler_disconn_cnc EVENT_disconn_cnc;
VB.Net
Method
Data
Structure
Variable names Type [in/out] Description
IsExitSkyMars bool out Exit SkyMars or not
Note While exiting SkyMars, the event will be dispatched to an
application,and the value of IsExitSkyMars will be ture, which
can be used to exit the application.
Support All Controllers
C# Sample 1.Create event
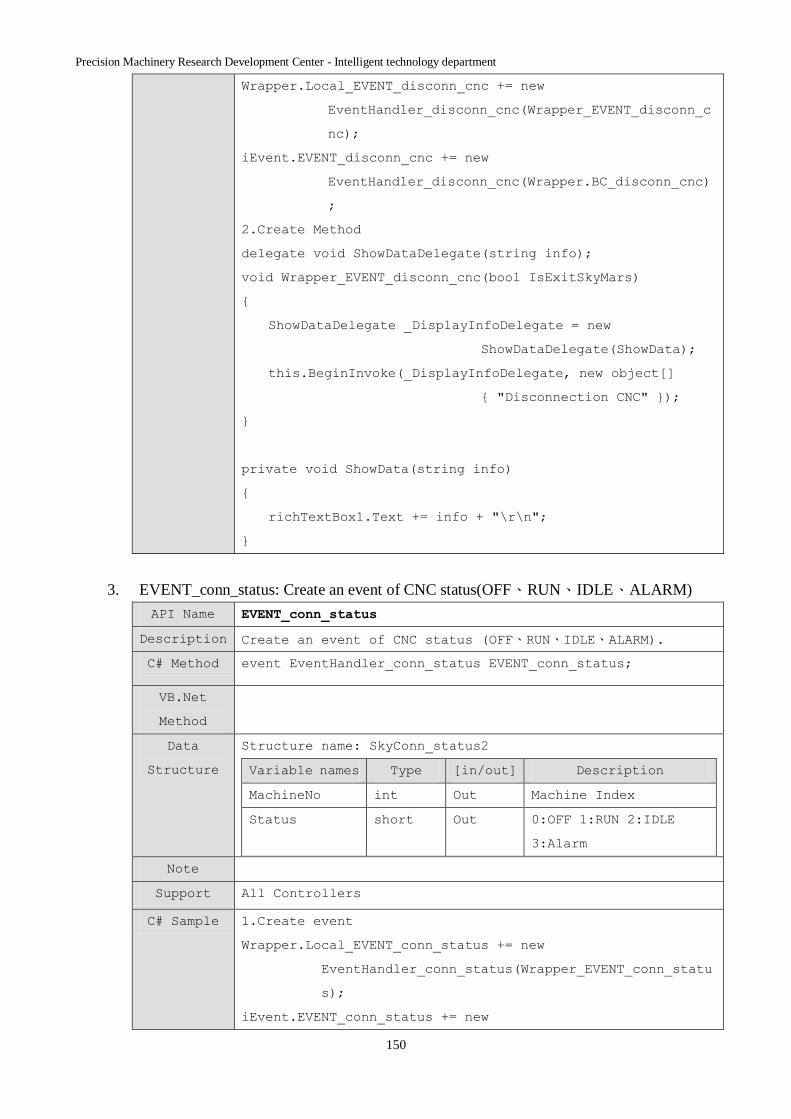
Precision Machinery Research Development Center - Intelligent technology department
150
Wrapper.Local_EVENT_disconn_cnc += new
EventHandler_disconn_cnc(Wrapper_EVENT_disconn_c
nc);
iEvent.EVENT_disconn_cnc += new
EventHandler_disconn_cnc(Wrapper.BC_disconn_cnc)
;
2.Create Method
delegate void ShowDataDelegate(string info);
void Wrapper_EVENT_disconn_cnc(bool IsExitSkyMars)
{
ShowDataDelegate _DisplayInfoDelegate = new
ShowDataDelegate(ShowData);
this.BeginInvoke(_DisplayInfoDelegate, new object[]
{ "Disconnection CNC" });
}
private void ShowData(string info)
{
richTextBox1.Text += info + "\r\n";
}
3. EVENT_conn_status: Create an event of CNC status(OFF、RUN、IDLE、ALARM)
API Name EVENT_conn_status
Description Create an event of CNC status (OFF、RUN、IDLE、ALARM).
C# Method event EventHandler_conn_status EVENT_conn_status;
VB.Net
Method
Data
Structure
Structure name: SkyConn_status2
Variable names Type [in/out] Description
MachineNo int Out Machine Index
Status short Out 0:OFF 1:RUN 2:IDLE
3:Alarm
Note
Support All Controllers
C# Sample 1.Create event
Wrapper.Local_EVENT_conn_status += new
EventHandler_conn_status(Wrapper_EVENT_conn_statu
s);
iEvent.EVENT_conn_status += new
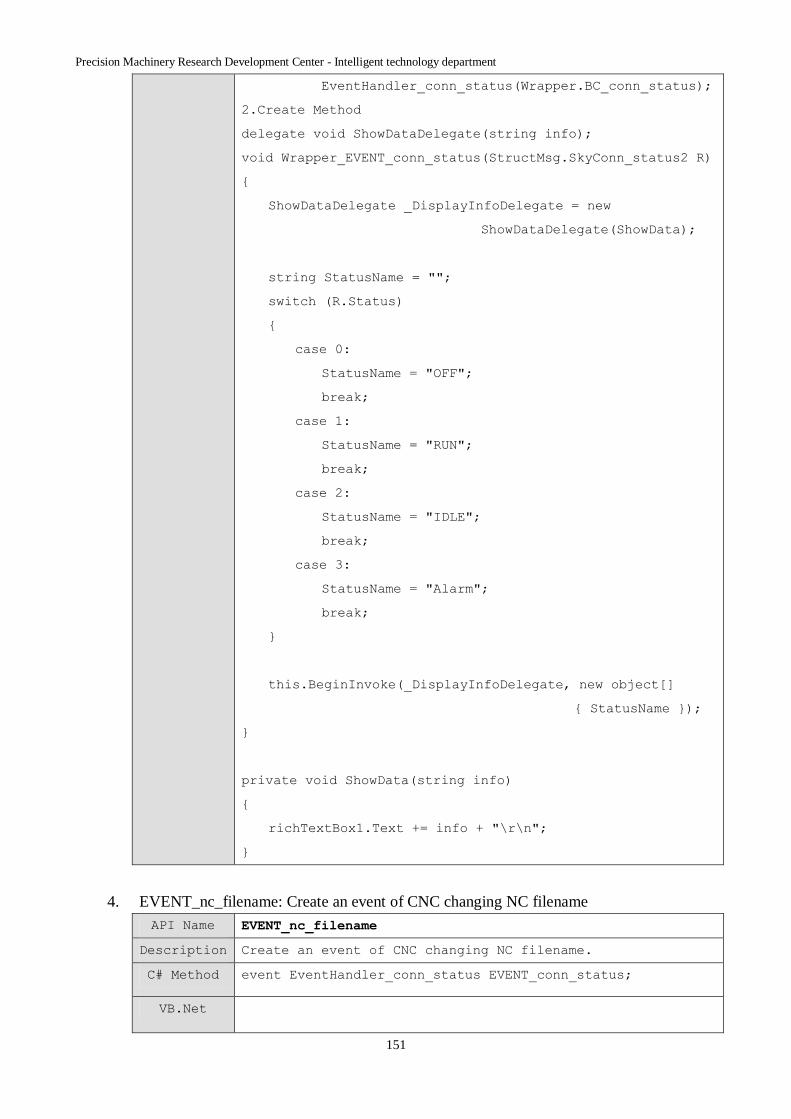
Precision Machinery Research Development Center - Intelligent technology department
151
EventHandler_conn_status(Wrapper.BC_conn_status);
2.Create Method
delegate void ShowDataDelegate(string info);
void Wrapper_EVENT_conn_status(StructMsg.SkyConn_status2 R)
{
ShowDataDelegate _DisplayInfoDelegate = new
ShowDataDelegate(ShowData);
string StatusName = "";
switch (R.Status)
{
case 0:
StatusName = "OFF";
break;
case 1:
StatusName = "RUN";
break;
case 2:
StatusName = "IDLE";
break;
case 3:
StatusName = "Alarm";
break;
}
this.BeginInvoke(_DisplayInfoDelegate, new object[]
{ StatusName });
}
private void ShowData(string info)
{
richTextBox1.Text += info + "\r\n";
}
4. EVENT_nc_filename: Create an event of CNC changing NC filename
API Name EVENT_nc_filename
Description Create an event of CNC changing NC filename.
C# Method event EventHandler_conn_status EVENT_conn_status;
VB.Net

Precision Machinery Research Development Center - Intelligent technology department
152
Method
Data
Structure
Structure name: SkyNc_filename
Variable
names
Type [in/out] Description
MachineNo int out Machine Index
MainProg string out Main Program Filename
SubProg string out Sub Program Filename
Note
Support All Controllers
C# Sample 1.Create event
Wrapper.Local_EVENT_nc_filename += new
EventHandler_nc_filename(Wrapper_EVENT_nc_filenam
e);
iEvent.EVENT_nc_filename += new
EventHandler_nc_filename(Wrapper.BC_nc_filename);
2.Create Method
delegate void ShowDataDelegate(string info);
void Wrapper_EVENT_nc_filename(StructMsg.SkyNc_filename2 R)
{
ShowDataDelegate _DisplayInfoDelegate = new
ShowDataDelegate(ShowData);
this.BeginInvoke(_DisplayInfoDelegate, new object[]
{ R.MainProg + ", " + R.SubProg });
}
private void ShowData(string info)
{
richTextBox1.Text += info + "\r\n";
}
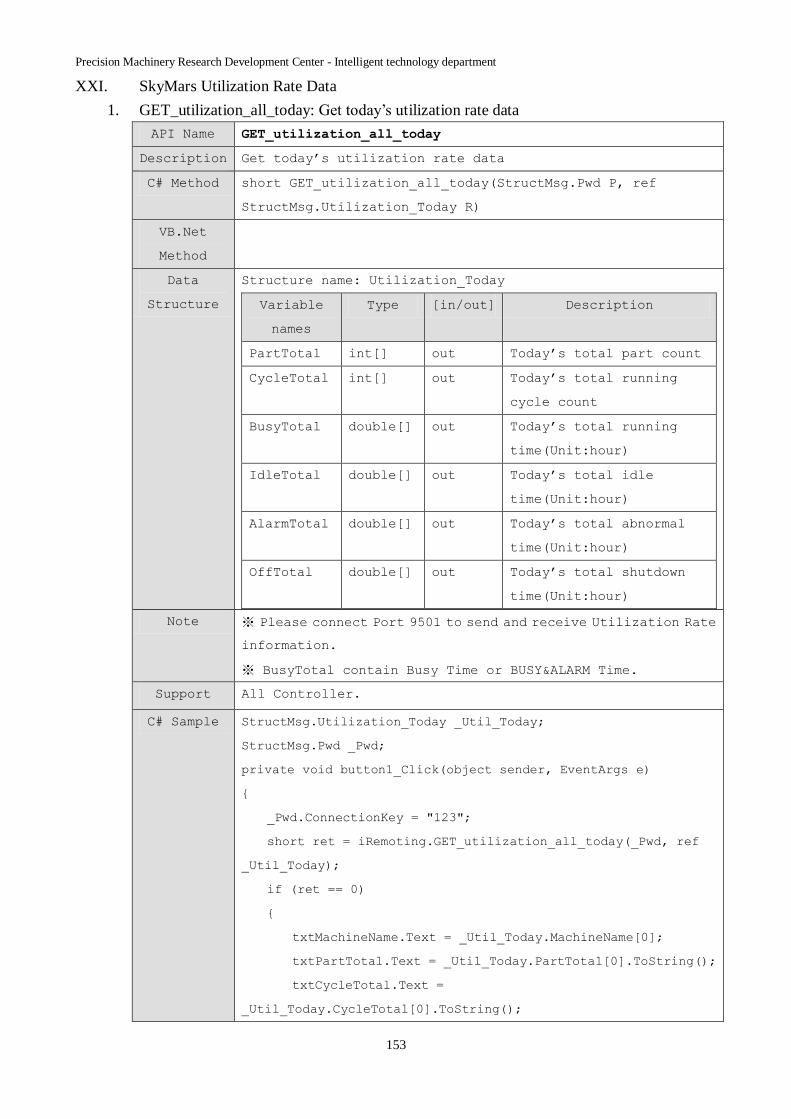
Precision Machinery Research Development Center - Intelligent technology department
153
XXI. SkyMars Utilization Rate Data
1. GET_utilization_all_today: Get today’s utilization rate data
API Name GET_utilization_all_today
Description Get today’s utilization rate data
C# Method short GET_utilization_all_today(StructMsg.Pwd P, ref
StructMsg.Utilization_Today R)
VB.Net
Method
Data
Structure
Structure name: Utilization_Today
Variable
names
Type [in/out] Description
PartTotal int[] out Today’s total part count
CycleTotal int[] out Today’s total running
cycle count
BusyTotal double[] out Today’s total running
time(Unit:hour)
IdleTotal double[] out Today’s total idle
time(Unit:hour)
AlarmTotal double[] out Today’s total abnormal
time(Unit:hour)
OffTotal double[] out Today’s total shutdown
time(Unit:hour)
Note ※ Please connect Port 9501 to send and receive Utilization Rate
information.
※ BusyTotal contain Busy Time or BUSY&ALARM Time.
Support All Controller.
C# Sample StructMsg.Utilization_Today _Util_Today;
StructMsg.Pwd _Pwd;
private void button1_Click(object sender, EventArgs e)
{
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_utilization_all_today(_Pwd, ref
_Util_Today);
if (ret == 0)
{
txtMachineName.Text = _Util_Today.MachineName[0];
txtPartTotal.Text = _Util_Today.PartTotal[0].ToString();
txtCycleTotal.Text =
_Util_Today.CycleTotal[0].ToString();

Precision Machinery Research Development Center - Intelligent technology department
154
txtBusyTotal.Text = _Util_Today.BusyTotal[0].ToString();
txtIdleTotal.Text = _Util_Today.IdleTotal[0].ToString();
txtAlarmTotal.Text =
_Util_Today.AlarmTotal[0].ToString();
txtOffTotal.Text = _Util_Today.OffTotal[0].ToString();
}
}
2. GET_utilization_single_time: Get a single machine utilization rate data based on time
API Name GET_utilization_single_time
Description Get a single machine utilization rate data based on time
C# Method short GET_utilization_single_time(StructMsg.Pwd P, ref
StructMsg.Utilization R)
VB.Net
Method
Data
Structure
Structure name: Utilization
Variable
names
Type [in/out] Description
MachineName int in Machine Name
StDate DateTime in Start Date
EndDate DateTime in End Date
BusyTotal double out Total Running
Time(Unit:hour)
IdleTotal double out Total Idle
Time(Unit:hour)
AlarmTotal double out Total Abnormal
Time(Unit:hour)
OffTotal double out Total Shutdown
Time(Unit:hour)
Note ※ Please connect Port 9501 to send and receive Utilization Rate
information.
※ BusyTotal contain Busy Time or BUSY&ALARM Time。
※ If you want to search the same day, the variables "StDate"
and "EndDate" recommend to use the full date time, such as:
StDate: 2014/5/7 00:00:00.000
EndDate: 2014/5/7 23:59:59.999
Support All Controller.
C# Sample StructMsg.Utilization _Util;
StructMsg.Pwd _Pwd;
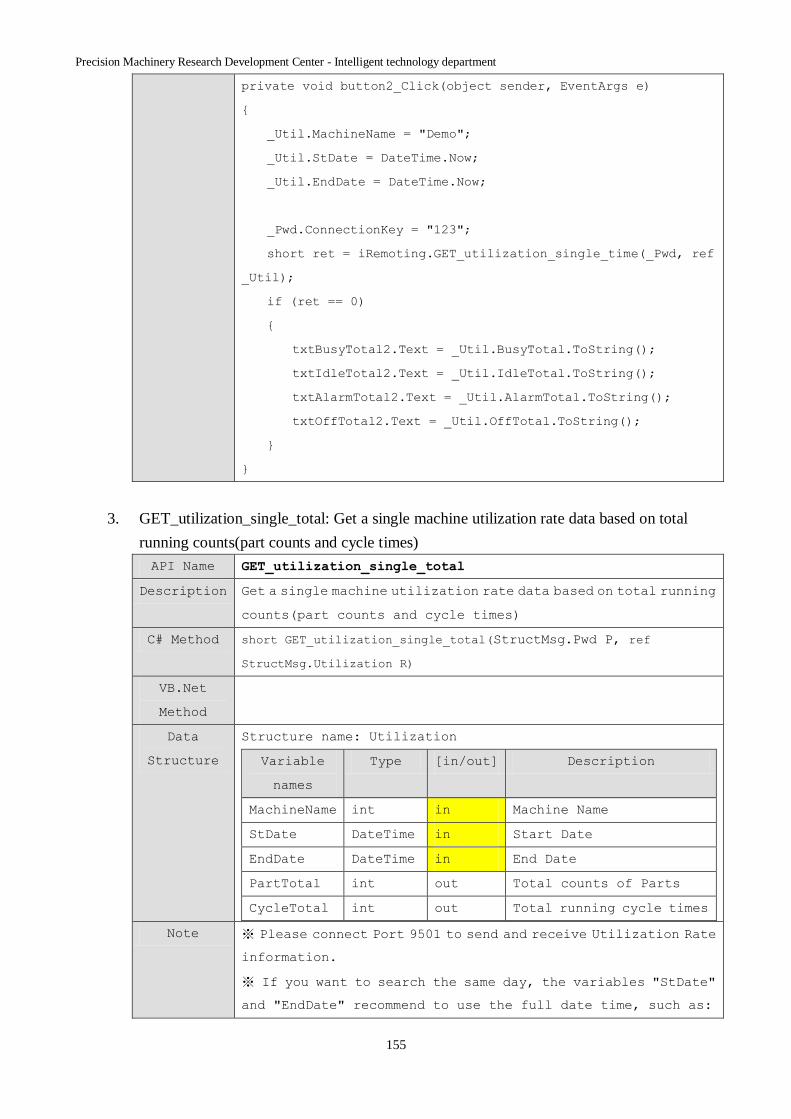
Precision Machinery Research Development Center - Intelligent technology department
155
private void button2_Click(object sender, EventArgs e)
{
_Util.MachineName = "Demo";
_Util.StDate = DateTime.Now;
_Util.EndDate = DateTime.Now;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_utilization_single_time(_Pwd, ref
_Util);
if (ret == 0)
{
txtBusyTotal2.Text = _Util.BusyTotal.ToString();
txtIdleTotal2.Text = _Util.IdleTotal.ToString();
txtAlarmTotal2.Text = _Util.AlarmTotal.ToString();
txtOffTotal2.Text = _Util.OffTotal.ToString();
}
}
3. GET_utilization_single_total: Get a single machine utilization rate data based on total
running counts(part counts and cycle times)
API Name GET_utilization_single_total
Description Get a single machine utilization rate data based on total running
counts(part counts and cycle times)
C# Method short GET_utilization_single_total(StructMsg.Pwd P, ref
StructMsg.Utilization R)
VB.Net
Method
Data
Structure
Structure name: Utilization
Variable
names
Type [in/out] Description
MachineName int in Machine Name
StDate DateTime in Start Date
EndDate DateTime in End Date
PartTotal int out Total counts of Parts
CycleTotal int out Total running cycle times
Note ※ Please connect Port 9501 to send and receive Utilization Rate
information.
※ If you want to search the same day, the variables "StDate"
and "EndDate" recommend to use the full date time, such as:
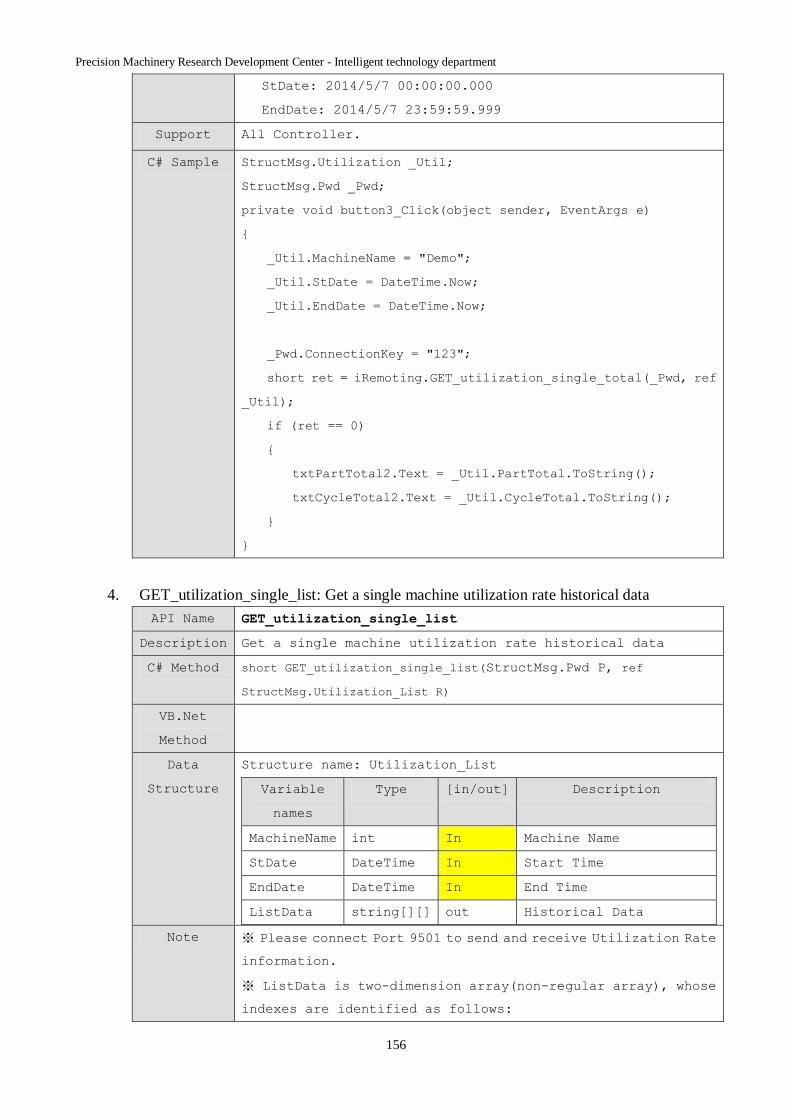
Precision Machinery Research Development Center - Intelligent technology department
156
StDate: 2014/5/7 00:00:00.000
EndDate: 2014/5/7 23:59:59.999
Support All Controller.
C# Sample StructMsg.Utilization _Util;
StructMsg.Pwd _Pwd;
private void button3_Click(object sender, EventArgs e)
{
_Util.MachineName = "Demo";
_Util.StDate = DateTime.Now;
_Util.EndDate = DateTime.Now;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_utilization_single_total(_Pwd, ref
_Util);
if (ret == 0)
{
txtPartTotal2.Text = _Util.PartTotal.ToString();
txtCycleTotal2.Text = _Util.CycleTotal.ToString();
}
}
4. GET_utilization_single_list: Get a single machine utilization rate historical data
API Name GET_utilization_single_list
Description Get a single machine utilization rate historical data
C# Method short GET_utilization_single_list(StructMsg.Pwd P, ref
StructMsg.Utilization_List R)
VB.Net
Method
Data
Structure
Structure name: Utilization_List
Variable
names
Type [in/out] Description
MachineName int In Machine Name
StDate DateTime In Start Time
EndDate DateTime In End Time
ListData string[][] out Historical Data
Note ※ Please connect Port 9501 to send and receive Utilization Rate
information.
※ ListData is two-dimension array(non-regular array), whose
indexes are identified as follows:
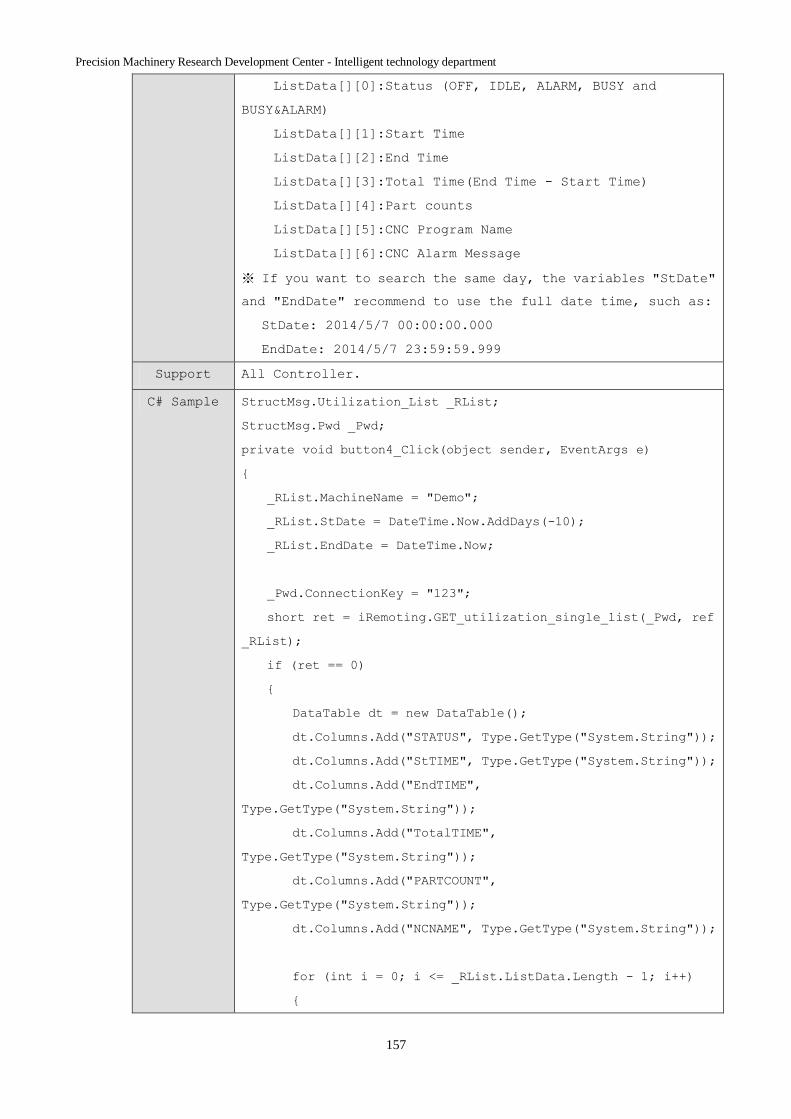
Precision Machinery Research Development Center - Intelligent technology department
157
ListData[][0]:Status (OFF, IDLE, ALARM, BUSY and
BUSY&ALARM)
ListData[][1]:Start Time
ListData[][2]:End Time
ListData[][3]:Total Time(End Time - Start Time)
ListData[][4]:Part counts
ListData[][5]:CNC Program Name
ListData[][6]:CNC Alarm Message
※ If you want to search the same day, the variables "StDate"
and "EndDate" recommend to use the full date time, such as:
StDate: 2014/5/7 00:00:00.000
EndDate: 2014/5/7 23:59:59.999
Support All Controller.
C# Sample StructMsg.Utilization_List _RList;
StructMsg.Pwd _Pwd;
private void button4_Click(object sender, EventArgs e)
{
_RList.MachineName = "Demo";
_RList.StDate = DateTime.Now.AddDays(-10);
_RList.EndDate = DateTime.Now;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_utilization_single_list(_Pwd, ref
_RList);
if (ret == 0)
{
DataTable dt = new DataTable();
dt.Columns.Add("STATUS", Type.GetType("System.String"));
dt.Columns.Add("StTIME", Type.GetType("System.String"));
dt.Columns.Add("EndTIME",
Type.GetType("System.String"));
dt.Columns.Add("TotalTIME",
Type.GetType("System.String"));
dt.Columns.Add("PARTCOUNT",
Type.GetType("System.String"));
dt.Columns.Add("NCNAME", Type.GetType("System.String"));
for (int i = 0; i <= _RList.ListData.Length - 1; i++)
{
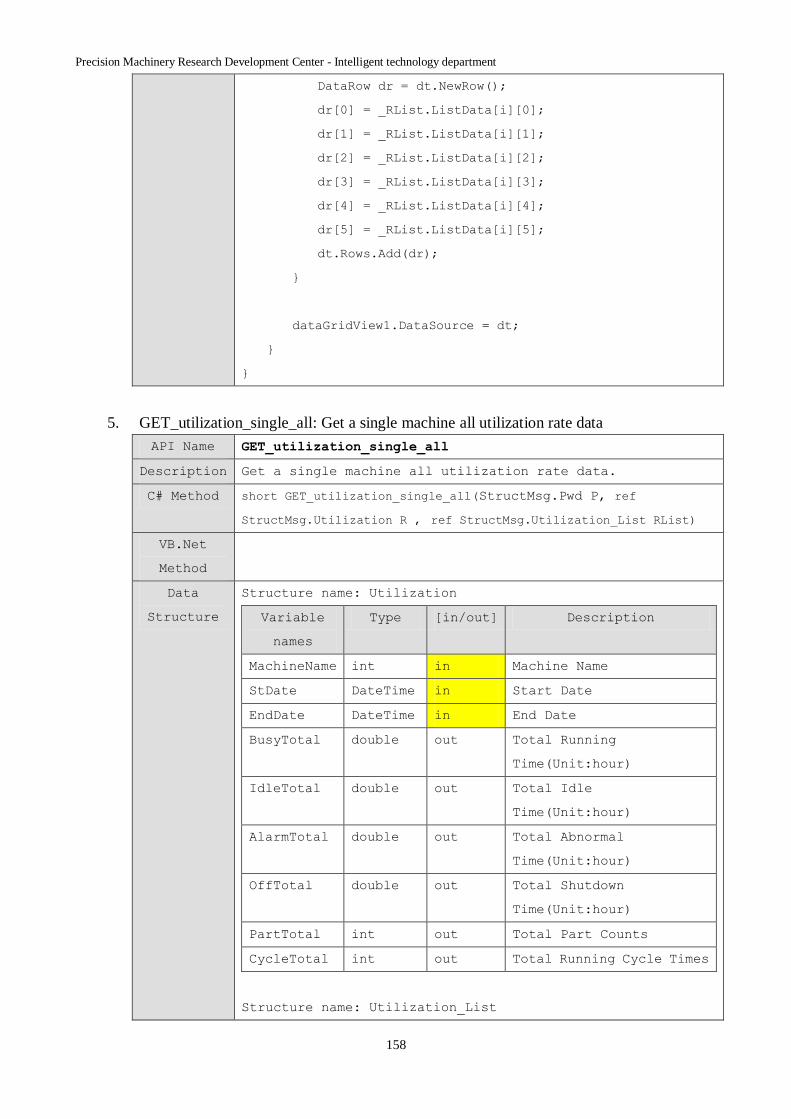
Precision Machinery Research Development Center - Intelligent technology department
158
DataRow dr = dt.NewRow();
dr[0] = _RList.ListData[i][0];
dr[1] = _RList.ListData[i][1];
dr[2] = _RList.ListData[i][2];
dr[3] = _RList.ListData[i][3];
dr[4] = _RList.ListData[i][4];
dr[5] = _RList.ListData[i][5];
dt.Rows.Add(dr);
}
dataGridView1.DataSource = dt;
}
}
5. GET_utilization_single_all: Get a single machine all utilization rate data
API Name GET_utilization_single_all
Description Get a single machine all utilization rate data.
C# Method short GET_utilization_single_all(StructMsg.Pwd P, ref
StructMsg.Utilization R , ref StructMsg.Utilization_List RList)
VB.Net
Method
Data
Structure
Structure name: Utilization
Variable
names
Type [in/out] Description
MachineName int in Machine Name
StDate DateTime in Start Date
EndDate DateTime in End Date
BusyTotal double out Total Running
Time(Unit:hour)
IdleTotal double out Total Idle
Time(Unit:hour)
AlarmTotal double out Total Abnormal
Time(Unit:hour)
OffTotal double out Total Shutdown
Time(Unit:hour)
PartTotal int out Total Part Counts
CycleTotal int out Total Running Cycle Times
Structure name: Utilization_List
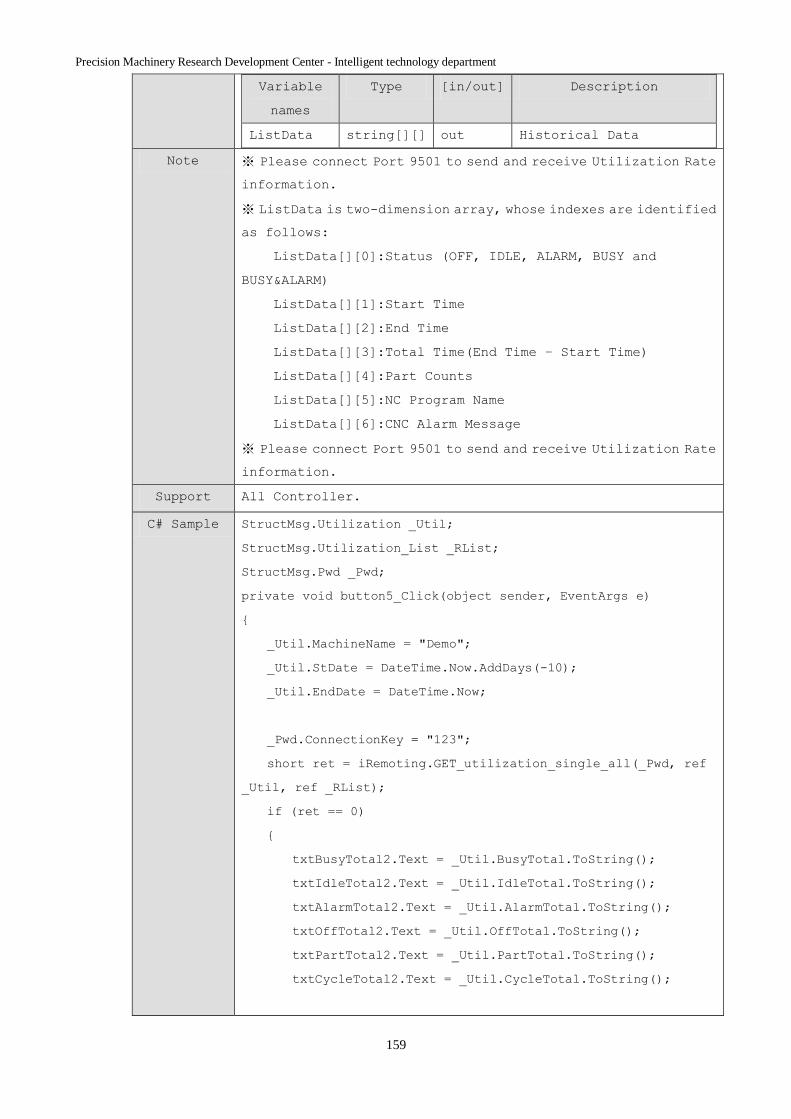
Precision Machinery Research Development Center - Intelligent technology department
159
Variable
names
Type [in/out] Description
ListData string[][] out Historical Data
Note ※ Please connect Port 9501 to send and receive Utilization Rate
information.
※ ListData is two-dimension array, whose indexes are identified
as follows:
ListData[][0]:Status (OFF, IDLE, ALARM, BUSY and
BUSY&ALARM)
ListData[][1]:Start Time
ListData[][2]:End Time
ListData[][3]:Total Time(End Time – Start Time)
ListData[][4]:Part Counts
ListData[][5]:NC Program Name
ListData[][6]:CNC Alarm Message
※ Please connect Port 9501 to send and receive Utilization Rate
information.
Support All Controller.
C# Sample StructMsg.Utilization _Util;
StructMsg.Utilization_List _RList;
StructMsg.Pwd _Pwd;
private void button5_Click(object sender, EventArgs e)
{
_Util.MachineName = "Demo";
_Util.StDate = DateTime.Now.AddDays(-10);
_Util.EndDate = DateTime.Now;
_Pwd.ConnectionKey = "123";
short ret = iRemoting.GET_utilization_single_all(_Pwd, ref
_Util, ref _RList);
if (ret == 0)
{
txtBusyTotal2.Text = _Util.BusyTotal.ToString();
txtIdleTotal2.Text = _Util.IdleTotal.ToString();
txtAlarmTotal2.Text = _Util.AlarmTotal.ToString();
txtOffTotal2.Text = _Util.OffTotal.ToString();
txtPartTotal2.Text = _Util.PartTotal.ToString();
txtCycleTotal2.Text = _Util.CycleTotal.ToString();
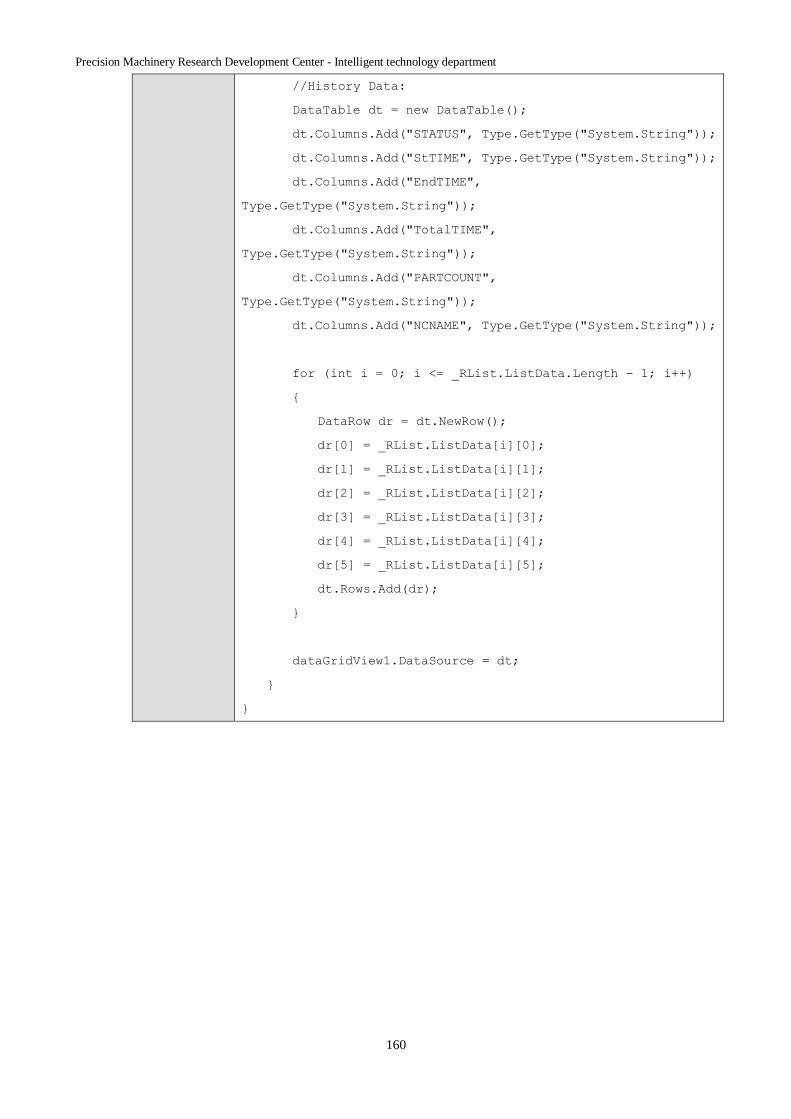
Precision Machinery Research Development Center - Intelligent technology department
160
//History Data:
DataTable dt = new DataTable();
dt.Columns.Add("STATUS", Type.GetType("System.String"));
dt.Columns.Add("StTIME", Type.GetType("System.String"));
dt.Columns.Add("EndTIME",
Type.GetType("System.String"));
dt.Columns.Add("TotalTIME",
Type.GetType("System.String"));
dt.Columns.Add("PARTCOUNT",
Type.GetType("System.String"));
dt.Columns.Add("NCNAME", Type.GetType("System.String"));
for (int i = 0; i <= _RList.ListData.Length - 1; i++)
{
DataRow dr = dt.NewRow();
dr[0] = _RList.ListData[i][0];
dr[1] = _RList.ListData[i][1];
dr[2] = _RList.ListData[i][2];
dr[3] = _RList.ListData[i][3];
dr[4] = _RList.ListData[i][4];
dr[5] = _RList.ListData[i][5];
dt.Rows.Add(dr);
}
dataGridView1.DataSource = dt;
}
}
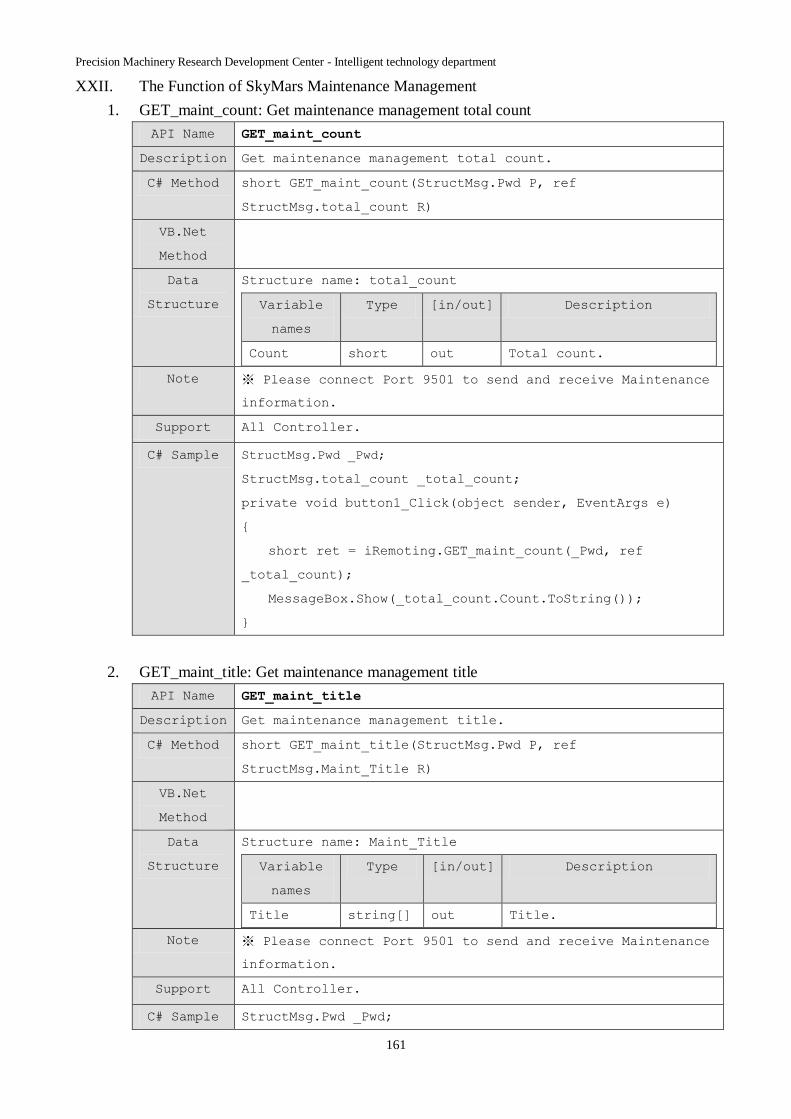
Precision Machinery Research Development Center - Intelligent technology department
161
XXII. The Function of SkyMars Maintenance Management
1. GET_maint_count: Get maintenance management total count
API Name GET_maint_count
Description Get maintenance management total count.
C# Method short GET_maint_count(StructMsg.Pwd P, ref
StructMsg.total_count R)
VB.Net
Method
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Count short out Total count.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.total_count _total_count;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_maint_count(_Pwd, ref
_total_count);
MessageBox.Show(_total_count.Count.ToString());
}
2. GET_maint_title: Get maintenance management title
API Name GET_maint_title
Description Get maintenance management title.
C# Method short GET_maint_title(StructMsg.Pwd P, ref
StructMsg.Maint_Title R)
VB.Net
Method
Data
Structure
Structure name: Maint_Title
Variable
names
Type [in/out] Description
Title string[] out Title.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
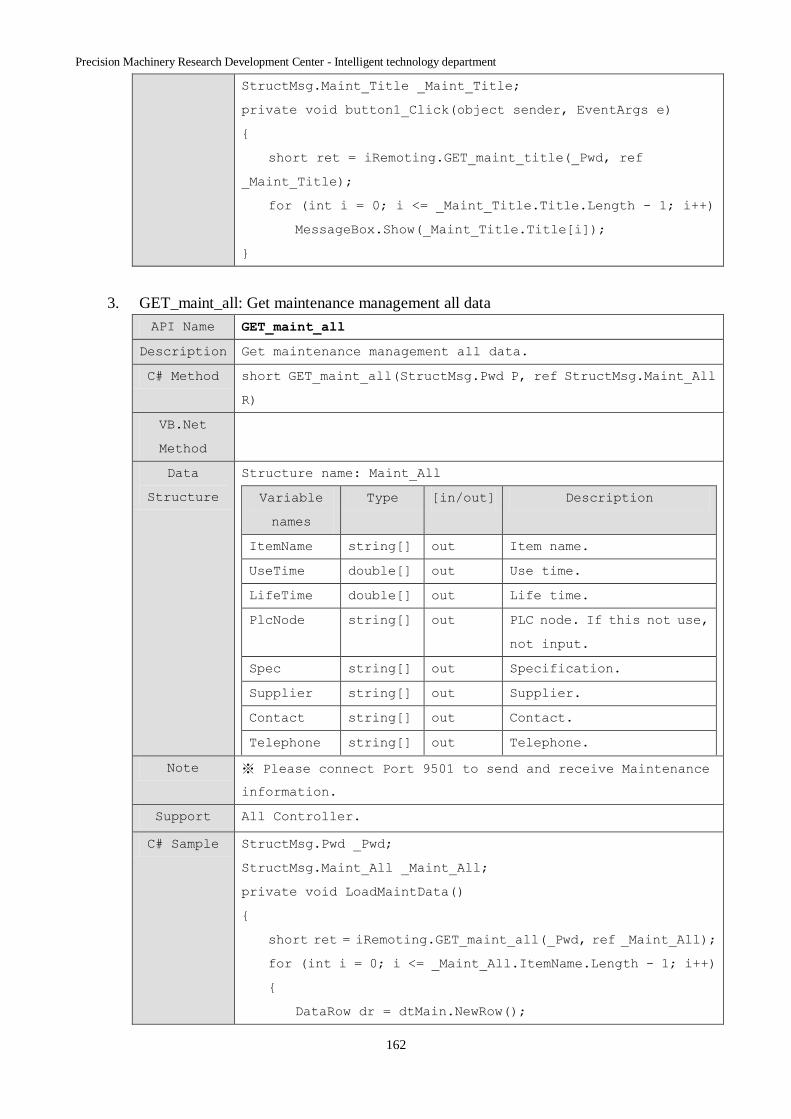
Precision Machinery Research Development Center - Intelligent technology department
162
StructMsg.Maint_Title _Maint_Title;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_maint_title(_Pwd, ref
_Maint_Title);
for (int i = 0; i <= _Maint_Title.Title.Length - 1; i++)
MessageBox.Show(_Maint_Title.Title[i]);
}
3. GET_maint_all: Get maintenance management all data
API Name GET_maint_all
Description Get maintenance management all data.
C# Method short GET_maint_all(StructMsg.Pwd P, ref StructMsg.Maint_All
R)
VB.Net
Method
Data
Structure
Structure name: Maint_All
Variable
names
Type [in/out] Description
ItemName string[] out Item name.
UseTime double[] out Use time.
LifeTime double[] out Life time.
PlcNode string[] out PLC node. If this not use,
not input.
Spec string[] out Specification.
Supplier string[] out Supplier.
Contact string[] out Contact.
Telephone string[] out Telephone.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_All _Maint_All;
private void LoadMaintData()
{
short ret = iRemoting.GET_maint_all(_Pwd, ref _Maint_All);
for (int i = 0; i <= _Maint_All.ItemName.Length - 1; i++)
{
DataRow dr = dtMain.NewRow();
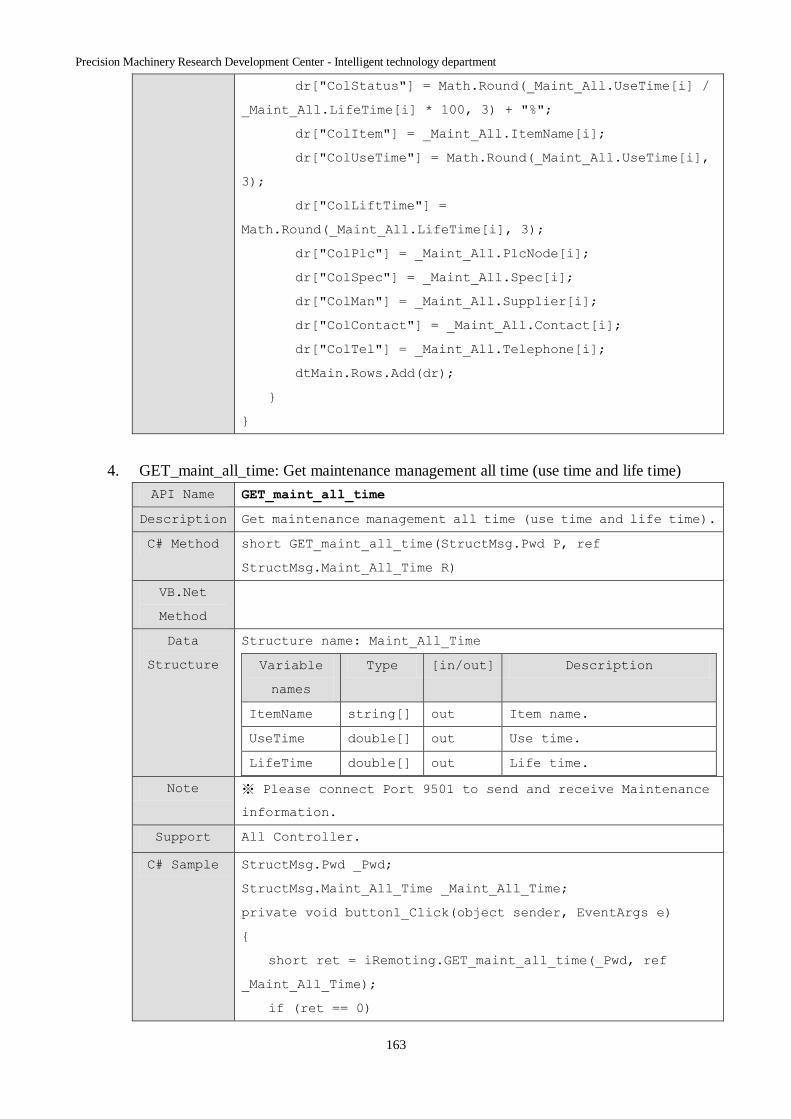
Precision Machinery Research Development Center - Intelligent technology department
163
dr["ColStatus"] = Math.Round(_Maint_All.UseTime[i] /
_Maint_All.LifeTime[i] * 100, 3) + "%";
dr["ColItem"] = _Maint_All.ItemName[i];
dr["ColUseTime"] = Math.Round(_Maint_All.UseTime[i],
3);
dr["ColLiftTime"] =
Math.Round(_Maint_All.LifeTime[i], 3);
dr["ColPlc"] = _Maint_All.PlcNode[i];
dr["ColSpec"] = _Maint_All.Spec[i];
dr["ColMan"] = _Maint_All.Supplier[i];
dr["ColContact"] = _Maint_All.Contact[i];
dr["ColTel"] = _Maint_All.Telephone[i];
dtMain.Rows.Add(dr);
}
}
4. GET_maint_all_time: Get maintenance management all time (use time and life time)
API Name GET_maint_all_time
Description Get maintenance management all time (use time and life time).
C# Method short GET_maint_all_time(StructMsg.Pwd P, ref
StructMsg.Maint_All_Time R)
VB.Net
Method
Data
Structure
Structure name: Maint_All_Time
Variable
names
Type [in/out] Description
ItemName string[] out Item name.
UseTime double[] out Use time.
LifeTime double[] out Life time.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_All_Time _Maint_All_Time;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_maint_all_time(_Pwd, ref
_Maint_All_Time);
if (ret == 0)
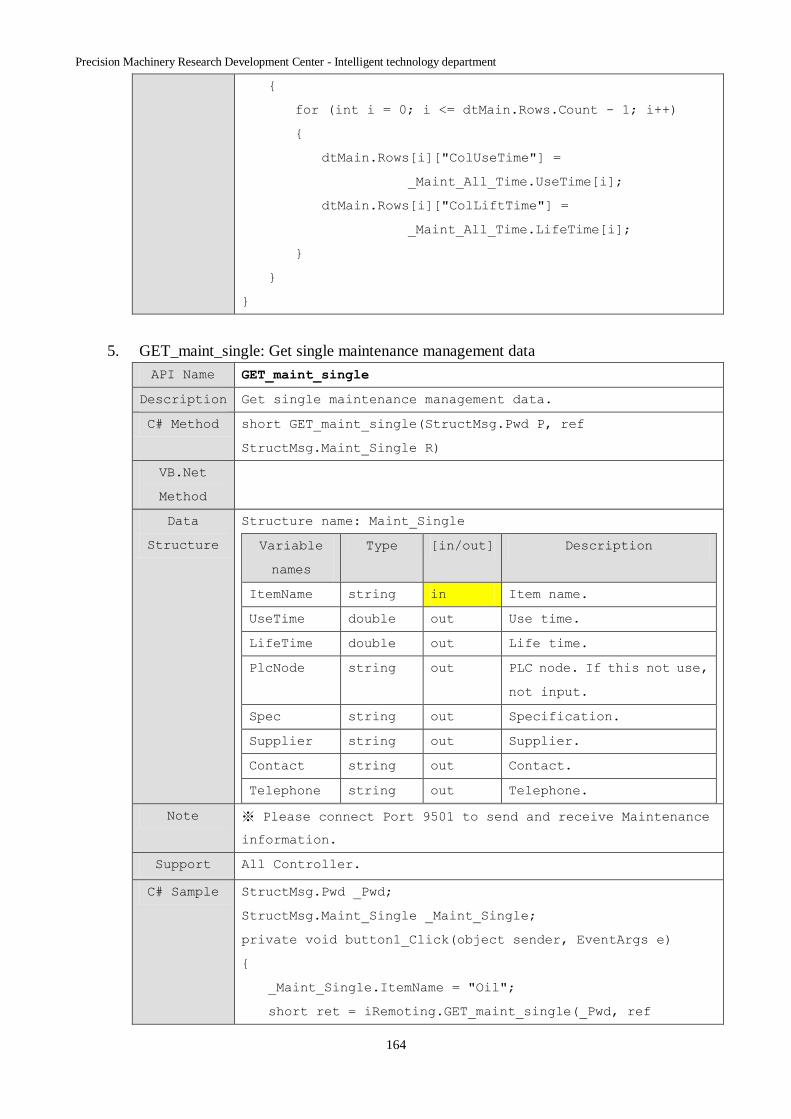
Precision Machinery Research Development Center - Intelligent technology department
164
{
for (int i = 0; i <= dtMain.Rows.Count - 1; i++)
{
dtMain.Rows[i]["ColUseTime"] =
_Maint_All_Time.UseTime[i];
dtMain.Rows[i]["ColLiftTime"] =
_Maint_All_Time.LifeTime[i];
}
}
}
5. GET_maint_single: Get single maintenance management data
API Name GET_maint_single
Description Get single maintenance management data.
C# Method short GET_maint_single(StructMsg.Pwd P, ref
StructMsg.Maint_Single R)
VB.Net
Method
Data
Structure
Structure name: Maint_Single
Variable
names
Type [in/out] Description
ItemName string in Item name.
UseTime double out Use time.
LifeTime double out Life time.
PlcNode string out PLC node. If this not use,
not input.
Spec string out Specification.
Supplier string out Supplier.
Contact string out Contact.
Telephone string out Telephone.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_Single _Maint_Single;
private void button1_Click(object sender, EventArgs e)
{
_Maint_Single.ItemName = "Oil";
short ret = iRemoting.GET_maint_single(_Pwd, ref
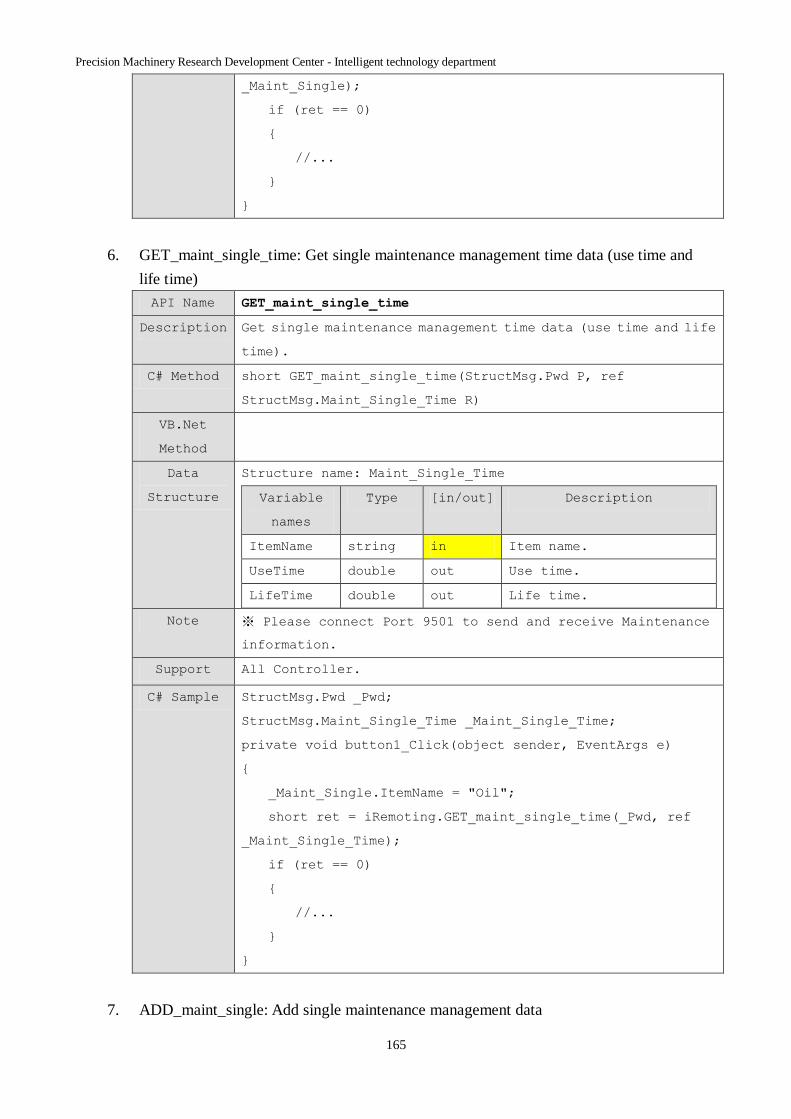
Precision Machinery Research Development Center - Intelligent technology department
165
_Maint_Single);
if (ret == 0)
{
//...
}
}
6. GET_maint_single_time: Get single maintenance management time data (use time and
life time)
API Name GET_maint_single_time
Description Get single maintenance management time data (use time and life
time).
C# Method short GET_maint_single_time(StructMsg.Pwd P, ref
StructMsg.Maint_Single_Time R)
VB.Net
Method
Data
Structure
Structure name: Maint_Single_Time
Variable
names
Type [in/out] Description
ItemName string in Item name.
UseTime double out Use time.
LifeTime double out Life time.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_Single_Time _Maint_Single_Time;
private void button1_Click(object sender, EventArgs e)
{
_Maint_Single.ItemName = "Oil";
short ret = iRemoting.GET_maint_single_time(_Pwd, ref
_Maint_Single_Time);
if (ret == 0)
{
//...
}
}
7. ADD_maint_single: Add single maintenance management data
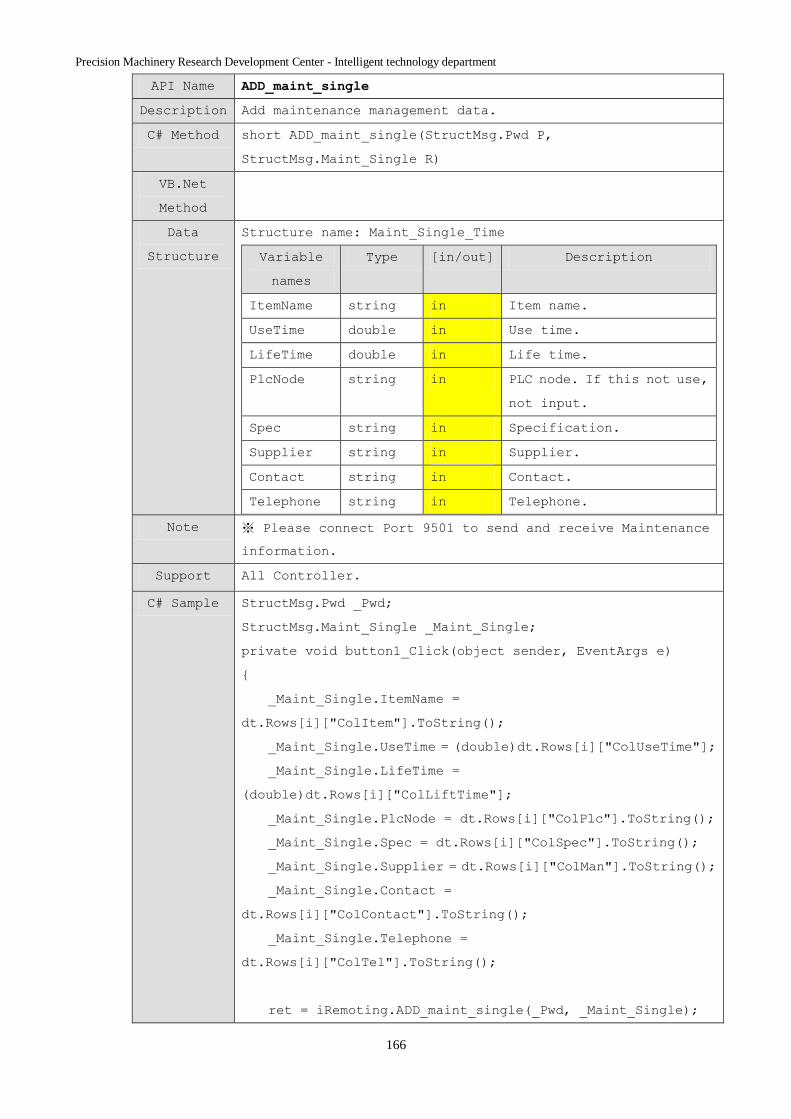
Precision Machinery Research Development Center - Intelligent technology department
166
API Name ADD_maint_single
Description Add maintenance management data.
C# Method short ADD_maint_single(StructMsg.Pwd P,
StructMsg.Maint_Single R)
VB.Net
Method
Data
Structure
Structure name: Maint_Single_Time
Variable
names
Type [in/out] Description
ItemName string in Item name.
UseTime double in Use time.
LifeTime double in Life time.
PlcNode string in PLC node. If this not use,
not input.
Spec string in Specification.
Supplier string in Supplier.
Contact string in Contact.
Telephone string in Telephone.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_Single _Maint_Single;
private void button1_Click(object sender, EventArgs e)
{
_Maint_Single.ItemName =
dt.Rows[i]["ColItem"].ToString();
_Maint_Single.UseTime = (double)dt.Rows[i]["ColUseTime"];
_Maint_Single.LifeTime =
(double)dt.Rows[i]["ColLiftTime"];
_Maint_Single.PlcNode = dt.Rows[i]["ColPlc"].ToString();
_Maint_Single.Spec = dt.Rows[i]["ColSpec"].ToString();
_Maint_Single.Supplier = dt.Rows[i]["ColMan"].ToString();
_Maint_Single.Contact =
dt.Rows[i]["ColContact"].ToString();
_Maint_Single.Telephone =
dt.Rows[i]["ColTel"].ToString();
ret = iRemoting.ADD_maint_single(_Pwd, _Maint_Single);
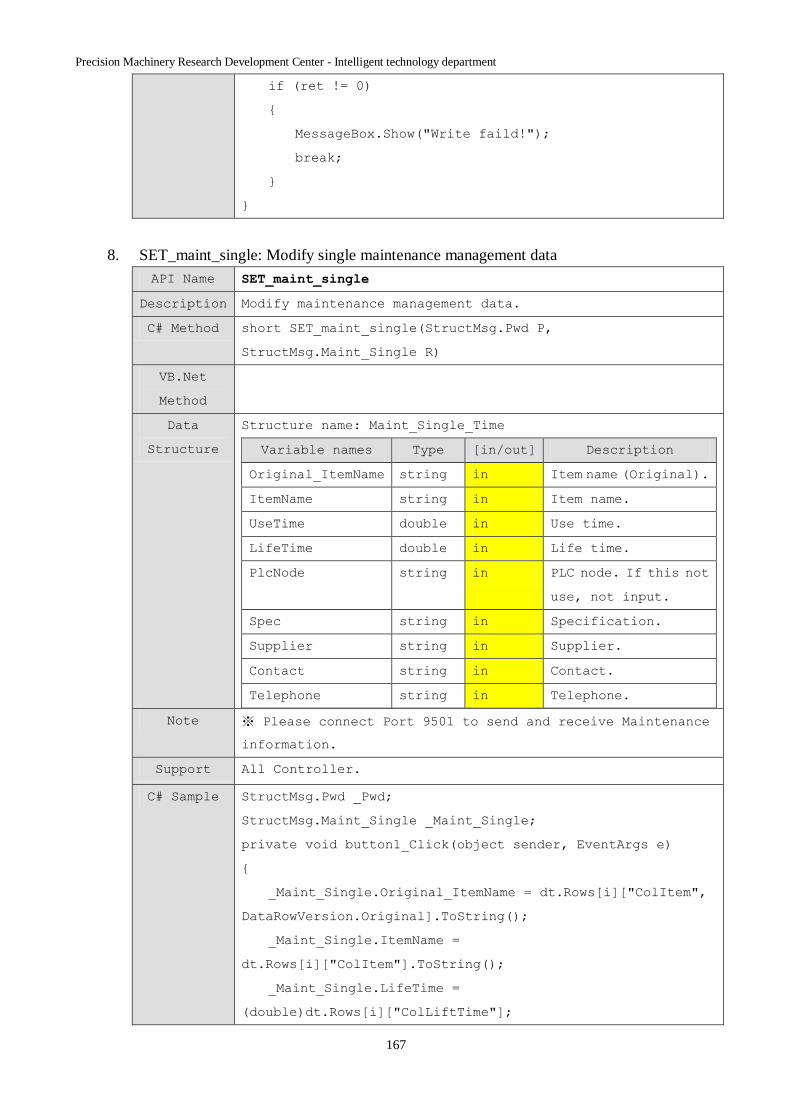
Precision Machinery Research Development Center - Intelligent technology department
167
if (ret != 0)
{
MessageBox.Show("Write faild!");
break;
}
}
8. SET_maint_single: Modify single maintenance management data
API Name SET_maint_single
Description Modify maintenance management data.
C# Method short SET_maint_single(StructMsg.Pwd P,
StructMsg.Maint_Single R)
VB.Net
Method
Data
Structure
Structure name: Maint_Single_Time
Variable names Type [in/out] Description
Original_ItemName string in Item name (Original).
ItemName string in Item name.
UseTime double in Use time.
LifeTime double in Life time.
PlcNode string in PLC node. If this not
use, not input.
Spec string in Specification.
Supplier string in Supplier.
Contact string in Contact.
Telephone string in Telephone.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_Single _Maint_Single;
private void button1_Click(object sender, EventArgs e)
{
_Maint_Single.Original_ItemName = dt.Rows[i]["ColItem",
DataRowVersion.Original].ToString();
_Maint_Single.ItemName =
dt.Rows[i]["ColItem"].ToString();
_Maint_Single.LifeTime =
(double)dt.Rows[i]["ColLiftTime"];
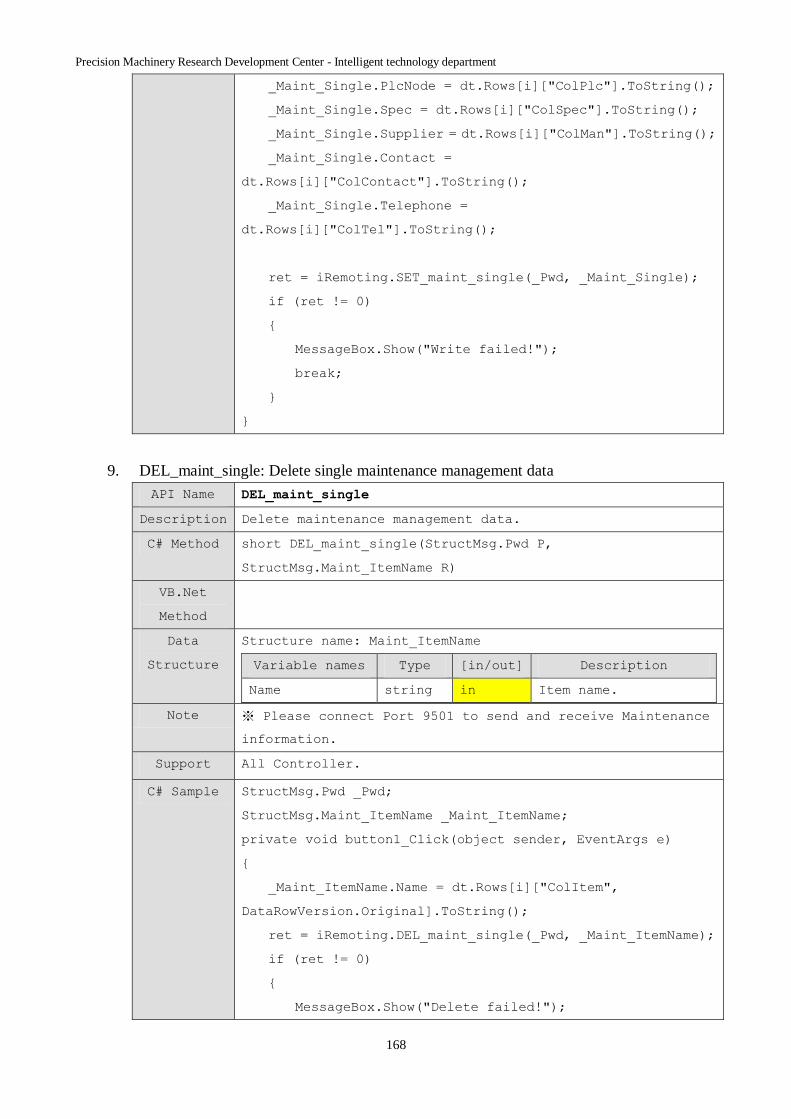
Precision Machinery Research Development Center - Intelligent technology department
168
_Maint_Single.PlcNode = dt.Rows[i]["ColPlc"].ToString();
_Maint_Single.Spec = dt.Rows[i]["ColSpec"].ToString();
_Maint_Single.Supplier = dt.Rows[i]["ColMan"].ToString();
_Maint_Single.Contact =
dt.Rows[i]["ColContact"].ToString();
_Maint_Single.Telephone =
dt.Rows[i]["ColTel"].ToString();
ret = iRemoting.SET_maint_single(_Pwd, _Maint_Single);
if (ret != 0)
{
MessageBox.Show("Write failed!");
break;
}
}
9. DEL_maint_single: Delete single maintenance management data
API Name DEL_maint_single
Description Delete maintenance management data.
C# Method short DEL_maint_single(StructMsg.Pwd P,
StructMsg.Maint_ItemName R)
VB.Net
Method
Data
Structure
Structure name: Maint_ItemName
Variable names Type [in/out] Description
Name string in Item name.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_ItemName _Maint_ItemName;
private void button1_Click(object sender, EventArgs e)
{
_Maint_ItemName.Name = dt.Rows[i]["ColItem",
DataRowVersion.Original].ToString();
ret = iRemoting.DEL_maint_single(_Pwd, _Maint_ItemName);
if (ret != 0)
{
MessageBox.Show("Delete failed!");
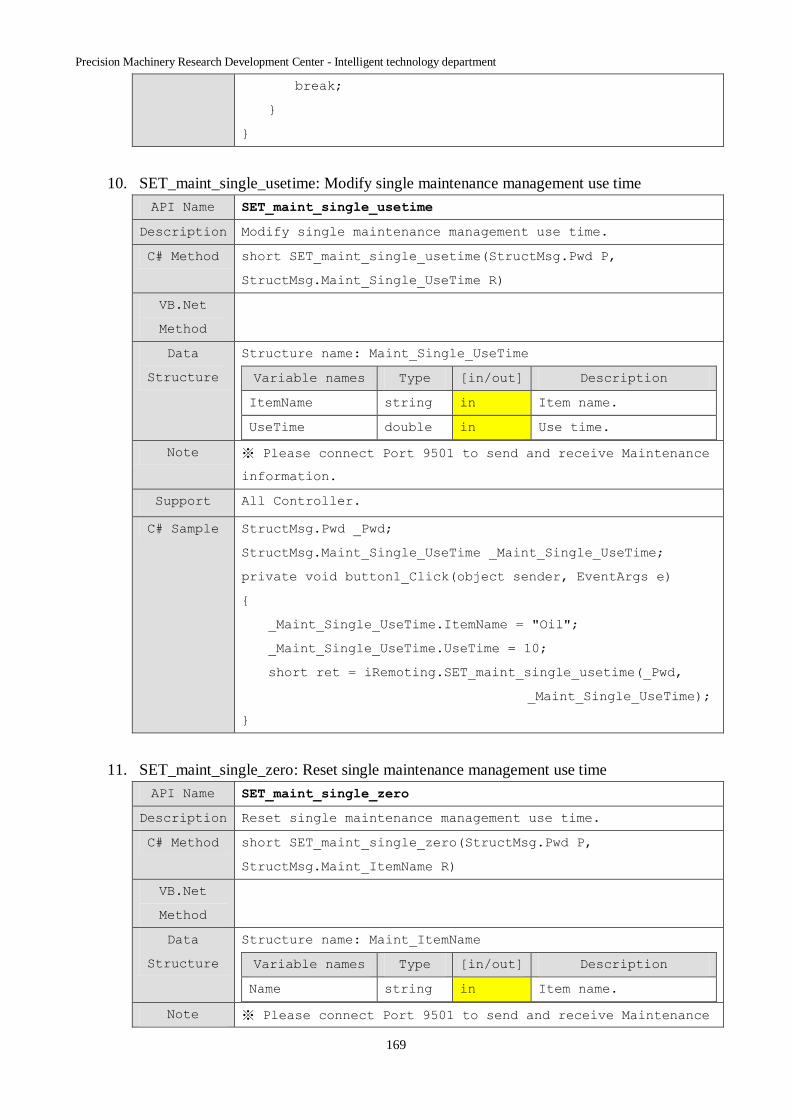
Precision Machinery Research Development Center - Intelligent technology department
169
break;
}
}
10. SET_maint_single_usetime: Modify single maintenance management use time
API Name SET_maint_single_usetime
Description Modify single maintenance management use time.
C# Method short SET_maint_single_usetime(StructMsg.Pwd P,
StructMsg.Maint_Single_UseTime R)
VB.Net
Method
Data
Structure
Structure name: Maint_Single_UseTime
Variable names Type [in/out] Description
ItemName string in Item name.
UseTime double in Use time.
Note ※ Please connect Port 9501 to send and receive Maintenance
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_Single_UseTime _Maint_Single_UseTime;
private void button1_Click(object sender, EventArgs e)
{
_Maint_Single_UseTime.ItemName = "Oil";
_Maint_Single_UseTime.UseTime = 10;
short ret = iRemoting.SET_maint_single_usetime(_Pwd,
_Maint_Single_UseTime);
}
11. SET_maint_single_zero: Reset single maintenance management use time
API Name SET_maint_single_zero
Description Reset single maintenance management use time.
C# Method short SET_maint_single_zero(StructMsg.Pwd P,
StructMsg.Maint_ItemName R)
VB.Net
Method
Data
Structure
Structure name: Maint_ItemName
Variable names Type [in/out] Description
Name string in Item name.
Note ※ Please connect Port 9501 to send and receive Maintenance

Precision Machinery Research Development Center - Intelligent technology department
170
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Maint_ItemName _Maint_ItemName;
private void button1_Click(object sender, EventArgs e)
{
_Maint_ItemName.Name =
dgvMain.Rows[e.RowIndex].Cells["ColItem"].Value.ToStri
ng();
short ret = iRemoting.SET_maint_single_zero(_Pwd,
_Maint_ItemName);
if (ret != 0)
MessageBox.Show("Reset failed!");
}
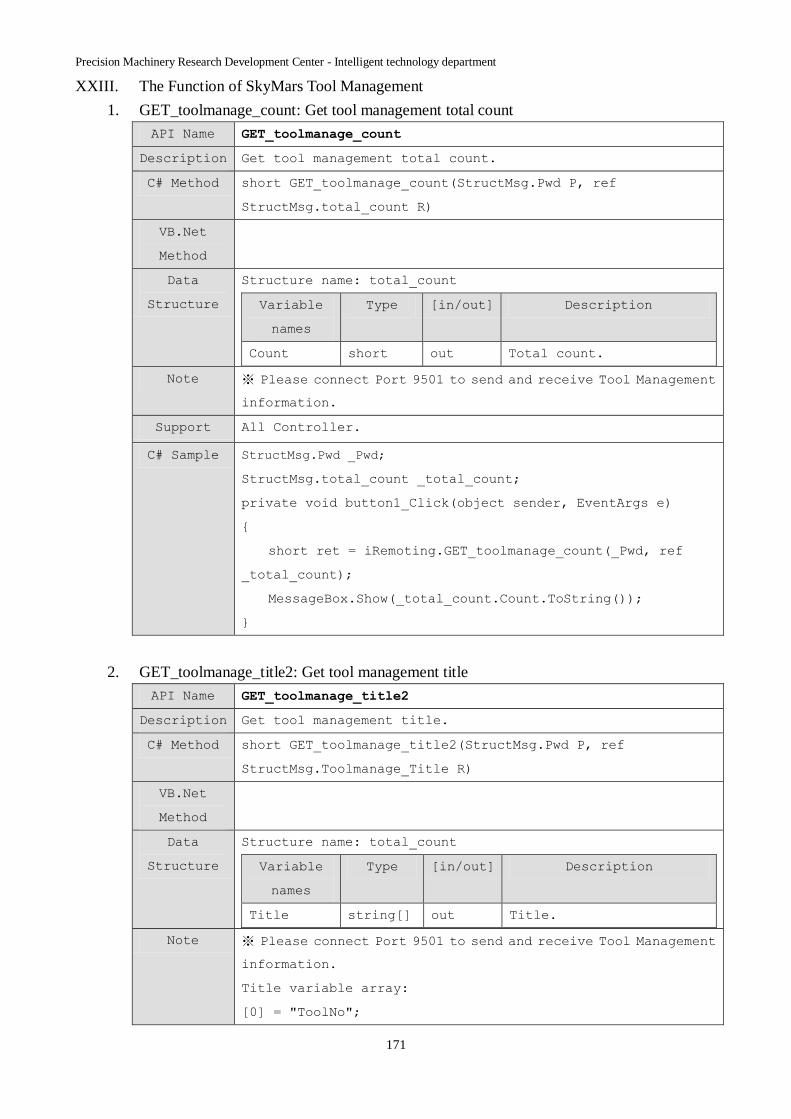
Precision Machinery Research Development Center - Intelligent technology department
171
XXIII. The Function of SkyMars Tool Management
1. GET_toolmanage_count: Get tool management total count
API Name GET_toolmanage_count
Description Get tool management total count.
C# Method short GET_toolmanage_count(StructMsg.Pwd P, ref
StructMsg.total_count R)
VB.Net
Method
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Count short out Total count.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.total_count _total_count;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_toolmanage_count(_Pwd, ref
_total_count);
MessageBox.Show(_total_count.Count.ToString());
}
2. GET_toolmanage_title2: Get tool management title
API Name GET_toolmanage_title2
Description Get tool management title.
C# Method short GET_toolmanage_title2(StructMsg.Pwd P, ref
StructMsg.Toolmanage_Title R)
VB.Net
Method
Data
Structure
Structure name: total_count
Variable
names
Type [in/out] Description
Title string[] out Title.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Title variable array:
[0] = "ToolNo";
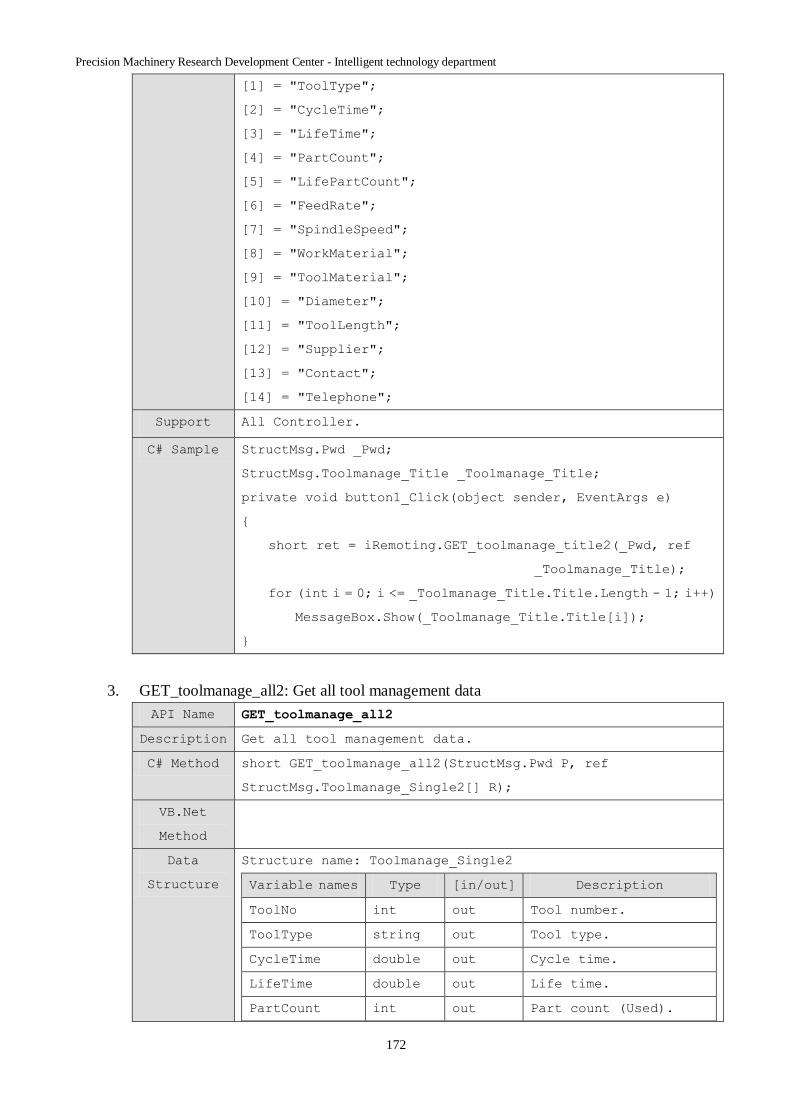
Precision Machinery Research Development Center - Intelligent technology department
172
[1] = "ToolType";
[2] = "CycleTime";
[3] = "LifeTime";
[4] = "PartCount";
[5] = "LifePartCount";
[6] = "FeedRate";
[7] = "SpindleSpeed";
[8] = "WorkMaterial";
[9] = "ToolMaterial";
[10] = "Diameter";
[11] = "ToolLength";
[12] = "Supplier";
[13] = "Contact";
[14] = "Telephone";
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Title _Toolmanage_Title;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_toolmanage_title2(_Pwd, ref
_Toolmanage_Title);
for (int i = 0; i <= _Toolmanage_Title.Title.Length - 1; i++)
MessageBox.Show(_Toolmanage_Title.Title[i]);
}
3. GET_toolmanage_all2: Get all tool management data
API Name GET_toolmanage_all2
Description Get all tool management data.
C# Method short GET_toolmanage_all2(StructMsg.Pwd P, ref
StructMsg.Toolmanage_Single2[] R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single2
Variable names Type [in/out] Description
ToolNo int out Tool number.
ToolType string out Tool type.
CycleTime double out Cycle time.
LifeTime double out Life time.
PartCount int out Part count (Used).
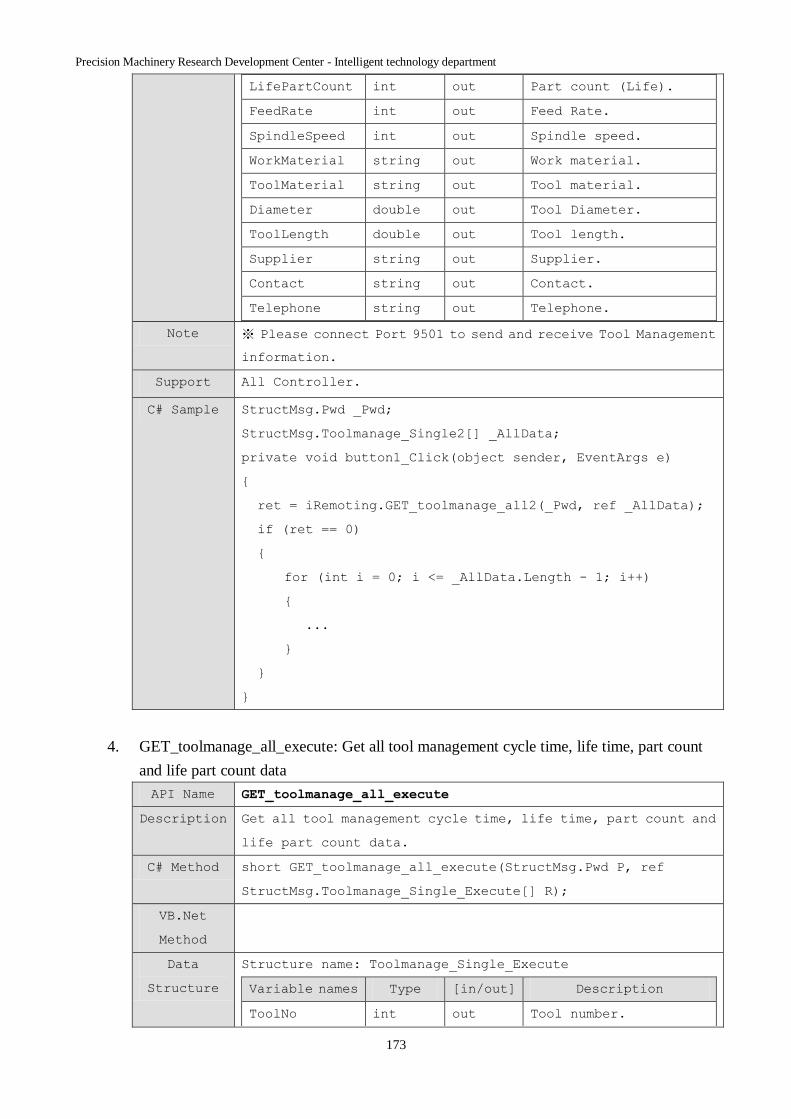
Precision Machinery Research Development Center - Intelligent technology department
173
LifePartCount int out Part count (Life).
FeedRate int out Feed Rate.
SpindleSpeed int out Spindle speed.
WorkMaterial string out Work material.
ToolMaterial string out Tool material.
Diameter double out Tool Diameter.
ToolLength double out Tool length.
Supplier string out Supplier.
Contact string out Contact.
Telephone string out Telephone.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single2[] _AllData;
private void button1_Click(object sender, EventArgs e)
{
ret = iRemoting.GET_toolmanage_all2(_Pwd, ref _AllData);
if (ret == 0)
{
for (int i = 0; i <= _AllData.Length - 1; i++)
{
...
}
}
}
4. GET_toolmanage_all_execute: Get all tool management cycle time, life time, part count
and life part count data
API Name GET_toolmanage_all_execute
Description Get all tool management cycle time, life time, part count and
life part count data.
C# Method short GET_toolmanage_all_execute(StructMsg.Pwd P, ref
StructMsg.Toolmanage_Single_Execute[] R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single_Execute
Variable names Type [in/out] Description
ToolNo int out Tool number.
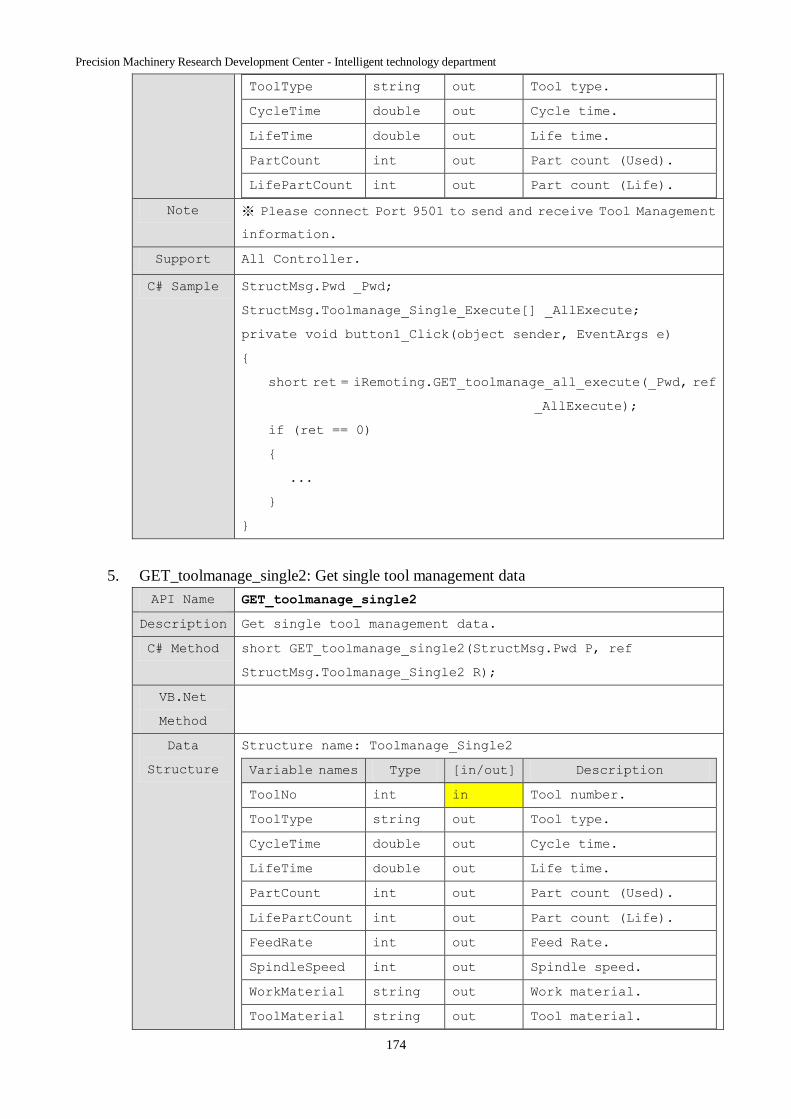
Precision Machinery Research Development Center - Intelligent technology department
174
ToolType string out Tool type.
CycleTime double out Cycle time.
LifeTime double out Life time.
PartCount int out Part count (Used).
LifePartCount int out Part count (Life).
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single_Execute[] _AllExecute;
private void button1_Click(object sender, EventArgs e)
{
short ret = iRemoting.GET_toolmanage_all_execute(_Pwd, ref
_AllExecute);
if (ret == 0)
{
...
}
}
5. GET_toolmanage_single2: Get single tool management data
API Name GET_toolmanage_single2
Description Get single tool management data.
C# Method short GET_toolmanage_single2(StructMsg.Pwd P, ref
StructMsg.Toolmanage_Single2 R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single2
Variable names Type [in/out] Description
ToolNo int in Tool number.
ToolType string out Tool type.
CycleTime double out Cycle time.
LifeTime double out Life time.
PartCount int out Part count (Used).
LifePartCount int out Part count (Life).
FeedRate int out Feed Rate.
SpindleSpeed int out Spindle speed.
WorkMaterial string out Work material.
ToolMaterial string out Tool material.
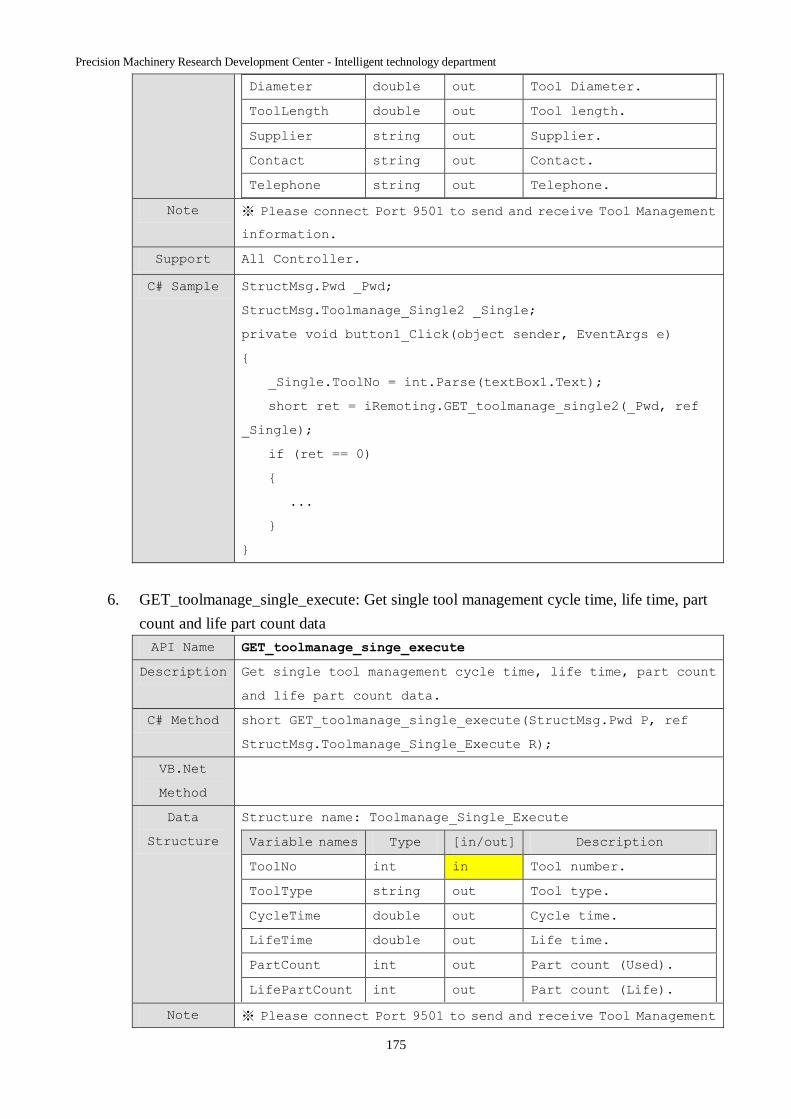
Precision Machinery Research Development Center - Intelligent technology department
175
Diameter double out Tool Diameter.
ToolLength double out Tool length.
Supplier string out Supplier.
Contact string out Contact.
Telephone string out Telephone.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single2 _Single;
private void button1_Click(object sender, EventArgs e)
{
_Single.ToolNo = int.Parse(textBox1.Text);
short ret = iRemoting.GET_toolmanage_single2(_Pwd, ref
_Single);
if (ret == 0)
{
...
}
}
6. GET_toolmanage_single_execute: Get single tool management cycle time, life time, part
count and life part count data
API Name GET_toolmanage_singe_execute
Description Get single tool management cycle time, life time, part count
and life part count data.
C# Method short GET_toolmanage_single_execute(StructMsg.Pwd P, ref
StructMsg.Toolmanage_Single_Execute R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single_Execute
Variable names Type [in/out] Description
ToolNo int in Tool number.
ToolType string out Tool type.
CycleTime double out Cycle time.
LifeTime double out Life time.
PartCount int out Part count (Used).
LifePartCount int out Part count (Life).
Note ※ Please connect Port 9501 to send and receive Tool Management
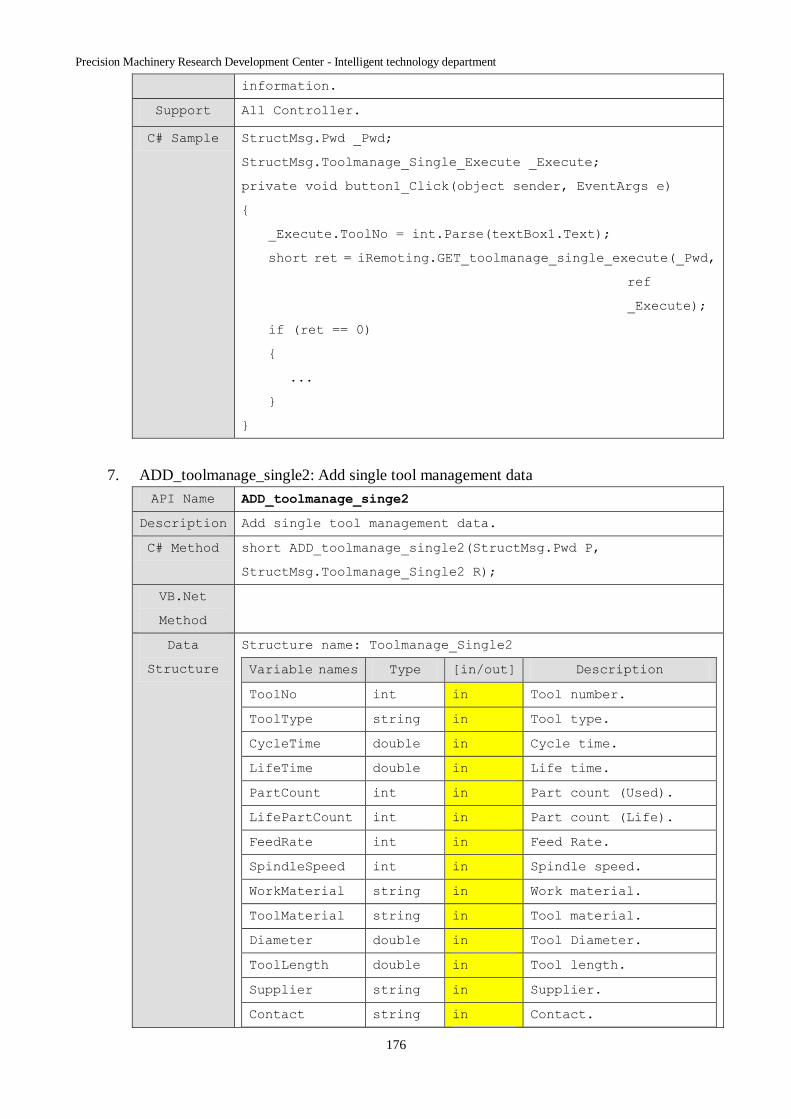
Precision Machinery Research Development Center - Intelligent technology department
176
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single_Execute _Execute;
private void button1_Click(object sender, EventArgs e)
{
_Execute.ToolNo = int.Parse(textBox1.Text);
short ret = iRemoting.GET_toolmanage_single_execute(_Pwd,
ref
_Execute);
if (ret == 0)
{
...
}
}
7. ADD_toolmanage_single2: Add single tool management data
API Name ADD_toolmanage_singe2
Description Add single tool management data.
C# Method short ADD_toolmanage_single2(StructMsg.Pwd P,
StructMsg.Toolmanage_Single2 R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single2
Variable names Type [in/out] Description
ToolNo int in Tool number.
ToolType string in Tool type.
CycleTime double in Cycle time.
LifeTime double in Life time.
PartCount int in Part count (Used).
LifePartCount int in Part count (Life).
FeedRate int in Feed Rate.
SpindleSpeed int in Spindle speed.
WorkMaterial string in Work material.
ToolMaterial string in Tool material.
Diameter double in Tool Diameter.
ToolLength double in Tool length.
Supplier string in Supplier.
Contact string in Contact.
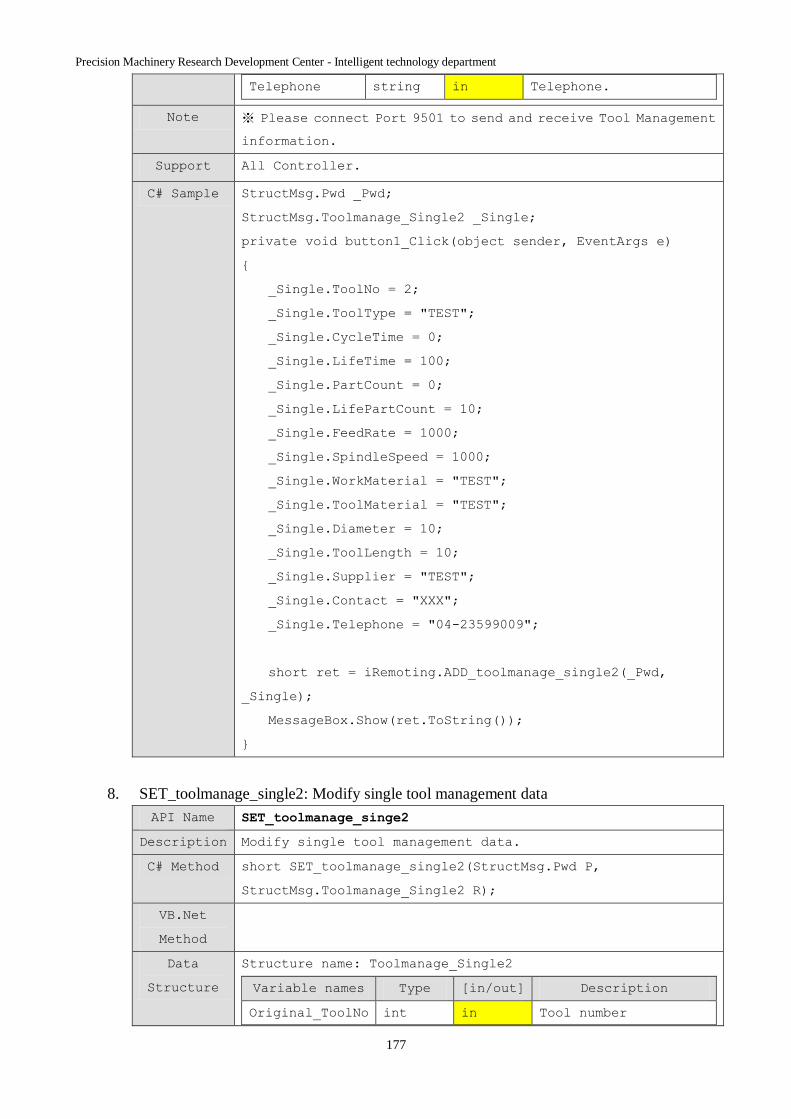
Precision Machinery Research Development Center - Intelligent technology department
177
Telephone string in Telephone.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single2 _Single;
private void button1_Click(object sender, EventArgs e)
{
_Single.ToolNo = 2;
_Single.ToolType = "TEST";
_Single.CycleTime = 0;
_Single.LifeTime = 100;
_Single.PartCount = 0;
_Single.LifePartCount = 10;
_Single.FeedRate = 1000;
_Single.SpindleSpeed = 1000;
_Single.WorkMaterial = "TEST";
_Single.ToolMaterial = "TEST";
_Single.Diameter = 10;
_Single.ToolLength = 10;
_Single.Supplier = "TEST";
_Single.Contact = "XXX";
_Single.Telephone = "04-23599009";
short ret = iRemoting.ADD_toolmanage_single2(_Pwd,
_Single);
MessageBox.Show(ret.ToString());
}
8. SET_toolmanage_single2: Modify single tool management data
API Name SET_toolmanage_singe2
Description Modify single tool management data.
C# Method short SET_toolmanage_single2(StructMsg.Pwd P,
StructMsg.Toolmanage_Single2 R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single2
Variable names Type [in/out] Description
Original_ToolNo int in Tool number
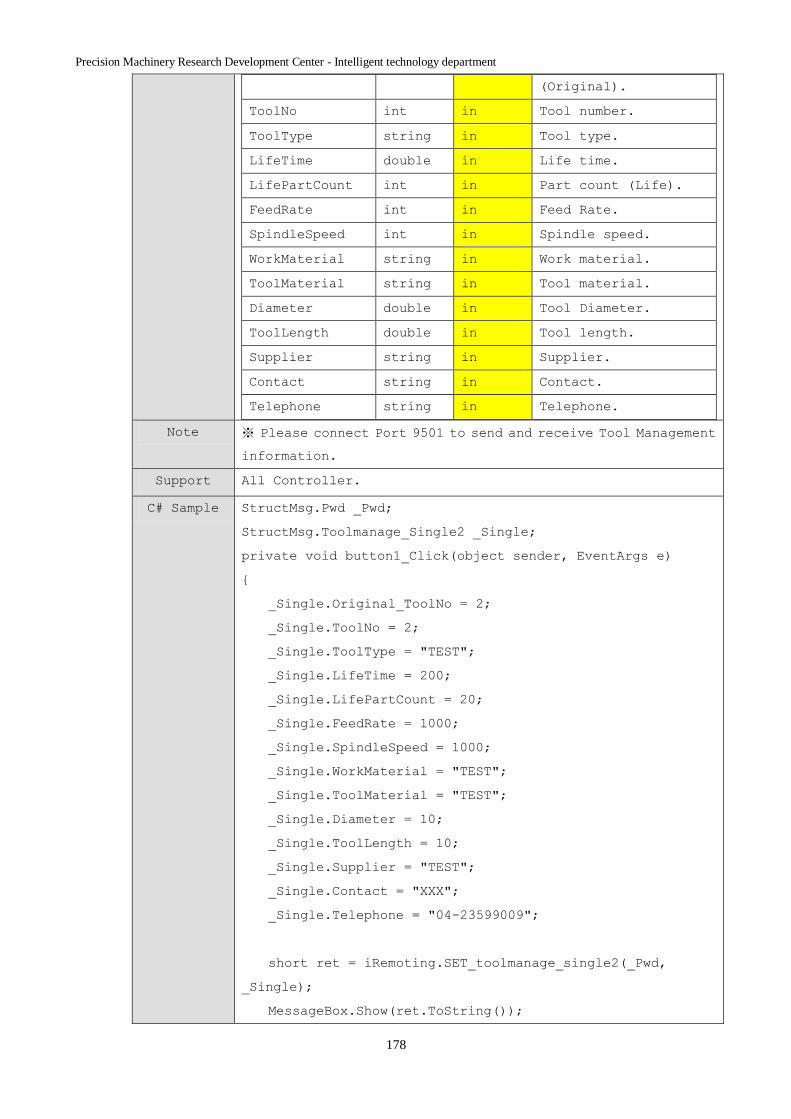
Precision Machinery Research Development Center - Intelligent technology department
178
(Original).
ToolNo int in Tool number.
ToolType string in Tool type.
LifeTime double in Life time.
LifePartCount int in Part count (Life).
FeedRate int in Feed Rate.
SpindleSpeed int in Spindle speed.
WorkMaterial string in Work material.
ToolMaterial string in Tool material.
Diameter double in Tool Diameter.
ToolLength double in Tool length.
Supplier string in Supplier.
Contact string in Contact.
Telephone string in Telephone.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single2 _Single;
private void button1_Click(object sender, EventArgs e)
{
_Single.Original_ToolNo = 2;
_Single.ToolNo = 2;
_Single.ToolType = "TEST";
_Single.LifeTime = 200;
_Single.LifePartCount = 20;
_Single.FeedRate = 1000;
_Single.SpindleSpeed = 1000;
_Single.WorkMaterial = "TEST";
_Single.ToolMaterial = "TEST";
_Single.Diameter = 10;
_Single.ToolLength = 10;
_Single.Supplier = "TEST";
_Single.Contact = "XXX";
_Single.Telephone = "04-23599009";
short ret = iRemoting.SET_toolmanage_single2(_Pwd,
_Single);
MessageBox.Show(ret.ToString());
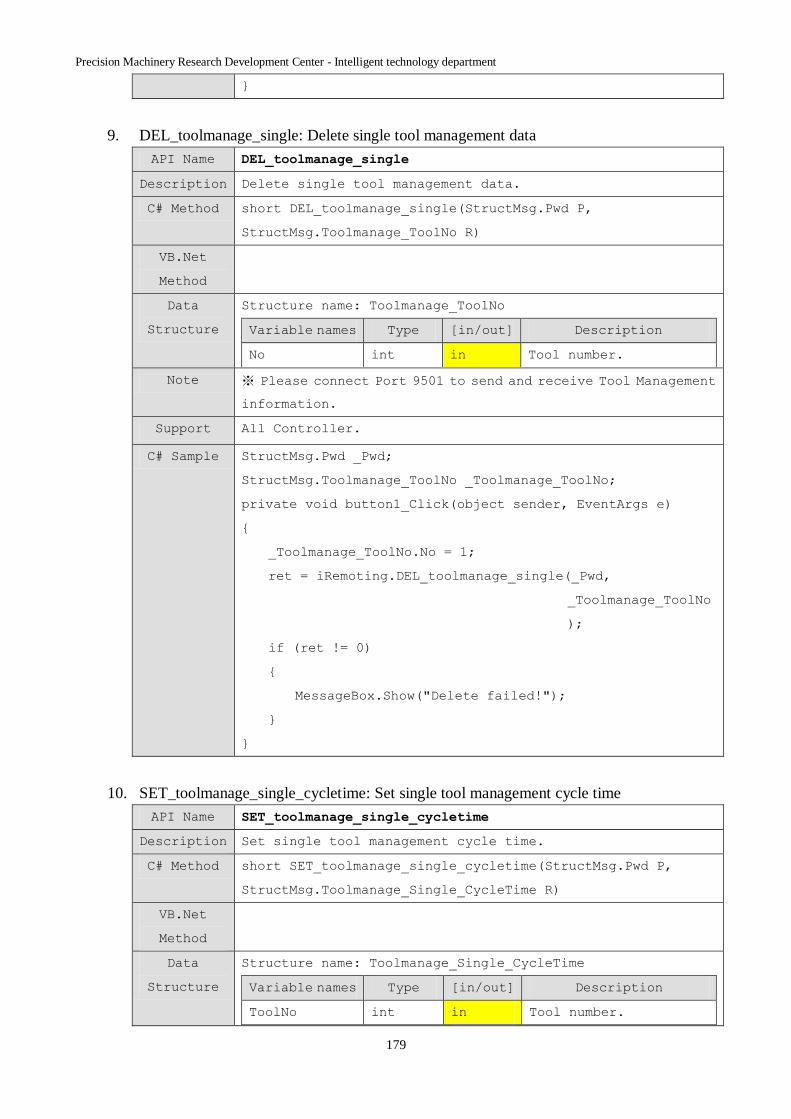
Precision Machinery Research Development Center - Intelligent technology department
179
}
9. DEL_toolmanage_single: Delete single tool management data
API Name DEL_toolmanage_single
Description Delete single tool management data.
C# Method short DEL_toolmanage_single(StructMsg.Pwd P,
StructMsg.Toolmanage_ToolNo R)
VB.Net
Method
Data
Structure
Structure name: Toolmanage_ToolNo
Variable names Type [in/out] Description
No int in Tool number.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_ToolNo _Toolmanage_ToolNo;
private void button1_Click(object sender, EventArgs e)
{
_Toolmanage_ToolNo.No = 1;
ret = iRemoting.DEL_toolmanage_single(_Pwd,
_Toolmanage_ToolNo
);
if (ret != 0)
{
MessageBox.Show("Delete failed!");
}
}
10. SET_toolmanage_single_cycletime: Set single tool management cycle time
API Name SET_toolmanage_single_cycletime
Description Set single tool management cycle time.
C# Method short SET_toolmanage_single_cycletime(StructMsg.Pwd P,
StructMsg.Toolmanage_Single_CycleTime R)
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single_CycleTime
Variable names Type [in/out] Description
ToolNo int in Tool number.

Precision Machinery Research Development Center - Intelligent technology department
180
CycleTime Double in Cycle time.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single_CycleTime
_Toolmanage_Single_CycleTime;
private void button1_Click(object sender, EventArgs e)
{
_Toolmanage_Single_CycleTime.ToolNo = 1;
short ret =
iRemoting.SET_toolmanage_single_cycletime(_Pwd,
_Toolmanage_Single_CycleTime);
if (ret != 0)
{
MessageBox.Show("Set failed!");
}
}
11. SET_toolmanage_single_partcount: Set single tool management part count
API Name SET_toolmanage_single_partcount
Description Set single tool management part count.
C# Method short SET_toolmanage_single_partcount(StructMsg.Pwd P,
StructMsg.Toolmanage_Single_PartCount R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single_CycleTime
Variable names Type [in/out] Description
ToolNo int in Tool number.
PartCount int in Part count.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_Single_PartCount _PartCount;
private void button1_Click(object sender, EventArgs e)
{
_PartCount.ToolNo = 2;
_PartCount.PartCount = 30;

Precision Machinery Research Development Center - Intelligent technology department
181
short ret =
iRemoting.SET_toolmanage_single_partcount(_Pwd,
_PartCount);
MessageBox.Show(ret.ToString());
}
12. SET_toolmanage_single_zero: Reset for single tool management cycle time
API Name SET_toolmanage_single_zero
Description Reset for single tool management cycle time.
C# Method short SET_toolmanage_single_partcount(StructMsg.Pwd P,
StructMsg.Toolmanage_Single_PartCount R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_Single_PartCount
Variable names Type [in/out] Description
No int in Tool number.
Note ※ Please connect Port 9501 to send and receive Tool Management
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_ToolNo _Toolmanage_ToolNo;
private void button1_Click(object sender, EventArgs e)
{
_Toolmanage_ToolNo.No = 1;
short ret = iRemoting.SET_toolmanage_single_zero(_Pwd,
_Toolmanage_ToolNo);
}
13. SET_toolmanage_single_zero_partcount: Reset single tool management part count
API Name SET_toolmanage_single_zero_partcount
Description Reset single tool management part count.
C# Method short SET_toolmanage_single_zero_partcount(StructMsg.Pwd P,
StructMsg.Toolmanage_ToolNo R);
VB.Net
Method
Data
Structure
Structure name: Toolmanage_ToolNo
Variable names Type [in/out] Description
No int in Tool number.
Note ※ Please connect Port 9501 to send and receive Tool Management
Precision Machinery Research Development Center - Intelligent technology department
182
information.
Support All Controller.
C# Sample StructMsg.Pwd _Pwd;
StructMsg.Toolmanage_ToolNo _ToolNo;
private void button1_Click(object sender, EventArgs e)
{
_ToolNo.No = 2;
short ret = iRemoting.SET_toolmanage_single_zero(_Pwd,
_ToolNo);
MessageBox.Show(ret.ToString());
}
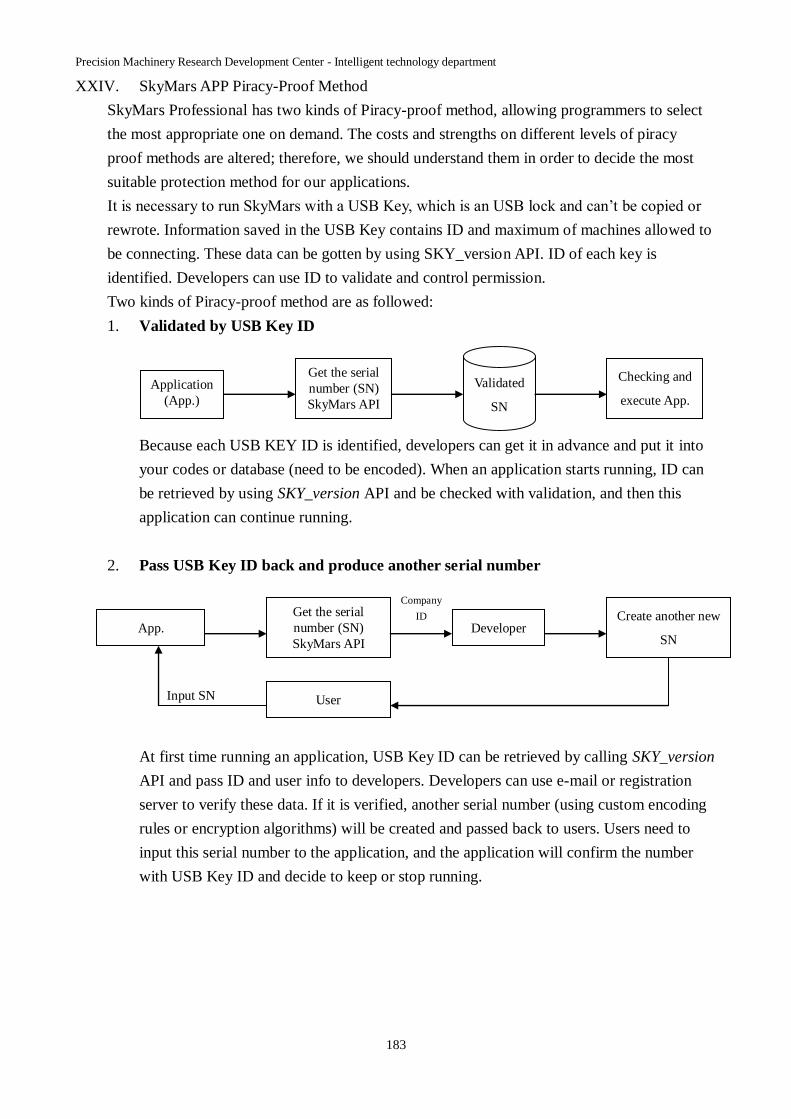
Precision Machinery Research Development Center - Intelligent technology department
183
XXIV. SkyMars APP Piracy-Proof Method
SkyMars Professional has two kinds of Piracy-proof method, allowing programmers to select
the most appropriate one on demand. The costs and strengths on different levels of piracy
proof methods are altered; therefore, we should understand them in order to decide the most
suitable protection method for our applications.
It is necessary to run SkyMars with a USB Key, which is an USB lock and can’t be copied or
rewrote. Information saved in the USB Key contains ID and maximum of machines allowed to
be connecting. These data can be gotten by using SKY_version API. ID of each key is
identified. Developers can use ID to validate and control permission.
Two kinds of Piracy-proof method are as followed:
1. Validated by USB Key ID
Because each USB KEY ID is identified, developers can get it in advance and put it into
your codes or database (need to be encoded). When an application starts running, ID can
be retrieved by using SKY_version API and be checked with validation, and then this
application can continue running.
2. Pass USB Key ID back and produce another serial number
At first time running an application, USB Key ID can be retrieved by calling SKY_version
API and pass ID and user info to developers. Developers can use e-mail or registration
server to verify these data. If it is verified, another serial number (using custom encoding
rules or encryption algorithms) will be created and passed back to users. Users need to
input this serial number to the application, and the application will confirm the number
with USB Key ID and decide to keep or stop running.
Application
(App.)
Get the serial
number (SN)
SkyMars API
Validated
SN
Checking and
execute App.
App.
Get the serial
number (SN)
SkyMars API
Developer
Company
ID Create another new
SN
User Input SN
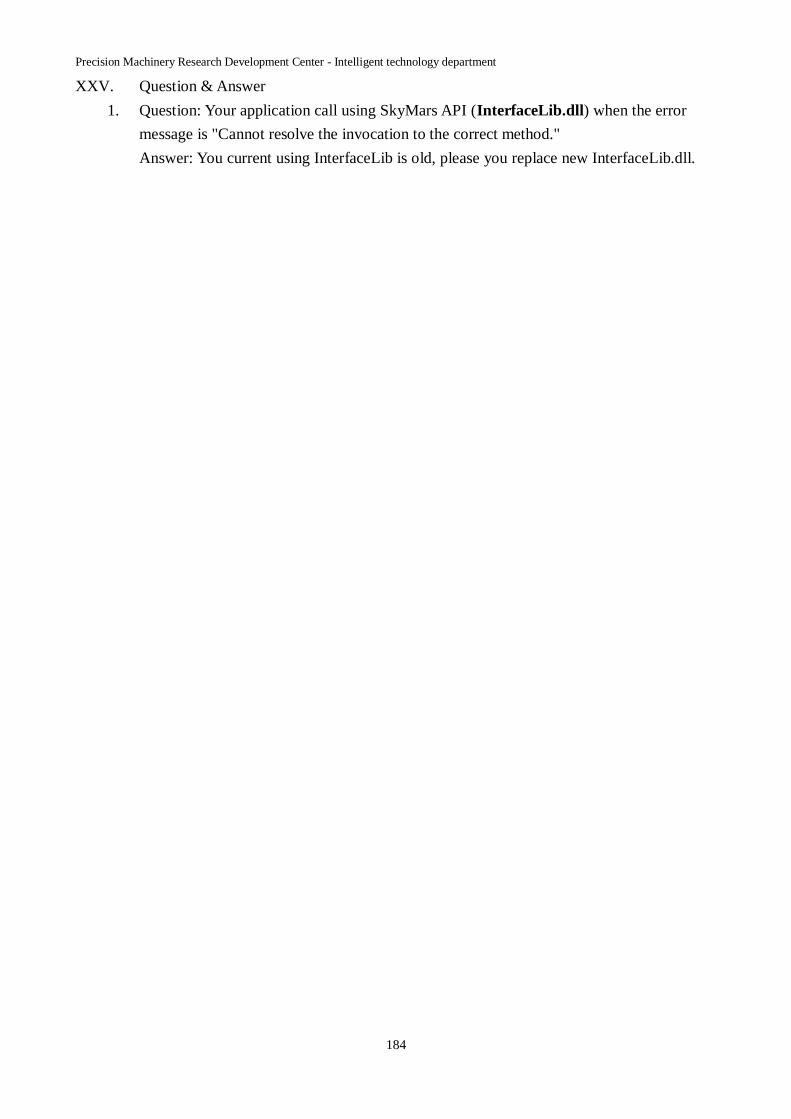
Precision Machinery Research Development Center - Intelligent technology department
184
XXV. Question & Answer
1. Question: Your application call using SkyMars API (InterfaceLib.dll) when the error
message is "Cannot resolve the invocation to the correct method."
Answer: You current using InterfaceLib is old, please you replace new InterfaceLib.dll.













![winprotocoldoc.blob.core.windows.net... · Web view[MS-WSUSAR]: Windows Server Update Services: Administrative API Remoting Protocol (WSUSAR) Intellectual Property Rights Notice for](https://static.fdocuments.in/doc/165x107/612dd7981ecc5158694270ad/-web-view-ms-wsusar-windows-server-update-services-administrative-api-remoting.jpg)


