Antonio Bicchi & Phriends · Colloquium on R&A -Napoli18 Dec., 2006 © Università di Pisa...
42
Physical Human-Robot Interaction: Dependability, Safety, and Performance Antonio Bicchi & Phriends Centro “E. Piaggio” University of Pisa
Transcript of Antonio Bicchi & Phriends · Colloquium on R&A -Napoli18 Dec., 2006 © Università di Pisa...

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Physical Human-Robot Interaction:Dependability, Safety, and Performance
Antonio Bicchi& Phriends
Centro “E. Piaggio”University of Pisa

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Popular notions of robotics have long foreseen humans and robots existing side-by-side sharing work
Until very recently, the reality has been quite different
Industrial robots have been far too dangerous to share space with humans, while physical interaction has been far too unintuitive.
Introduction

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Currently industrial robots work in far more structured environments than is required for human workers

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
pHRI: Robots in touch with HumansShortly, all this is going to change radically:the next generation of robots will interact with people directly.
• cooperative manipulation tasks• domestic applications (domotics)• entertainment• assistance• rehabilitation
SARCOSNASA-JPL
The Lokomat by Hocoma

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
UTAH
• teleoperation • human augmentation• haptic exoskeletons• mixed environments
pHRI: Robots in TOUCH with Humans
Berkeley
HAL – U. Tsukuba

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Accuracy less demanding Safety is a must
Keep using rigid robots;Increase sensors drastically;Use active control;
An approach: Design for Accuracy, Control for Safety
Modern approach: Design for Safety, Control for AccuracyMechanical (passive) compliance;Compensation by control;
Towards Intrinsically Safe Mechanisms
• Machines interacting with humans have different requirements than current in industry

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Research Issues for pHRI
Design
Sensors
Software
Control
Biomimetics
Planning
LighrtweightCompliance
LighrtweightCompliance
SafetyPerformance
SafetyPerformance
On-Line FusionDependability
On-Line FusionDependability
InterfacesHuman metrics
InterfacesHuman metrics
Open ArchitectureDependability
Open ArchitectureDependability
Real TimeConsistency
Real TimeConsistency

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
• The “holy grail” of pHRI design is intrinsic safety:
• to design a robot that will be safe for humans no matter what failure, malfunctioning, or even misuse might happen.
• Naturally, perfect safety against all odds is not feasible for machines which have to deliver performance in terms of weight lifting, swift motion, etc.:
• the trade-off between safety and performance is the name of the game in pHRI.
Safety in pHRI

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Traditional approaches:modify controllers for rigid robot manipulators
(stiffness, impedance control)add sensors (force, contact, proximity,…)
Well known intrinsic limitations to alter by control the behavior of the arm if the mechanical bandwidth is not matched to the task
In other words, making a rigid, heavy robot to behave gently and safely is an almost hopeless task, if realistic conditions are taken into account.
co-design of mechanics and control
Safety in pHRI

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
What does ‘safety’ mean? • The engineering field that has developed broadest experience with human safety in collisions is car industry;
• “Severity indices” are used as measures of risk in studies in passive damage in car accidents [Versace, 1971];
• Zinn et al. [2001] first used the Head Injury Coefficient (HIC) in robotics
• (other robotics-specific measures?) Tmax
Vope
t

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Conventional Design
• Given rotor + link inertia, covering, and acceptable HIC max. velocity
InertiaM
ax sa
fe sp
eed
Iso-HIC curve
v
Operator Inertia
CompliantCovering
RotorInertiaRotorInertia
LinkInertiaLink
Inertia
• First: minimize rotor + link inertia, use compliant covering if possible

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
The generation of DLR light-weight robots is among the most advanced implementations of the “traditional”approach
The DLR-III Light-Weight Arm lifts a payload equal to its own weight (13,5 kg).
Justin: 2 L-W Arms with Torso(DLR + UNINA)
Safety-oriented design

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Collision detection and reaction (DLR+UOR)
• Collision detection
• Collision reaction strategies
• Stop
• Switch to Grav. Comp.
• Swich to Grav. Comp and additional link inertia shaping
• Admittance control Flee
• Trajectory scaling Go back and forth along commanded trajectory
• Adaptive trajectory deformation
• …

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Theoretically, HIC goes to zeroas Kf increases.
Conventional Design with Active Force Control- Ideally
Unsafe
Safe
Operator Inertia
TotalInertiaTotalInertia K InterfaceK Position }
Kf
Pos. Ref. v
Force feedback
+v
Force Controller GainH
IC

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Crash Tests (DLR + KUKA + ADAC)

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Crash Tests (DLR + KUKA + ADAC) Instrumentation

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Conventional Design with Active Force Control- Really
1) limited torque/link inertia ratio
2) limited mechanical bandwidth
3) limited sampling bandwidthH
IC .Safe
Unsafe
Ratio of Link Inertia vs. Max. Torque
Active force control unsafe in real conditions
Sampling timeForce feedback Operator Inertia
TotalInertiaTotalInertia K InterfaceK Position }
Kf
Ref. Pos. v+
v

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Conventional Design with Active Force Control- Really
HIC
Experimental Data

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
How to get beyond these limitations?
uCompliantCoveringRotor
InertiaRotorInertia
LinkInertiaLink
Inertia
uCompliantCoveringRotor
InertiaRotorInertia
LinkInertiaLink
Inertia
Basic idea: decouple rotor inertia from link
via mechanical elasticity
Heavy Light

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Soft Robots
Spring Flamingo (MIT Leg Lab)
Knee Orthosis (Yobotics)
VUB - SoftArm R&MM
COG

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
How to get beyond these limitations? - 2
uCompliantCoveringRotor
InertiaRotorInertia
LinkInertiaLink
Inertia
uCompliantCoveringRotor
InertiaRotorInertia
LinkInertiaLink
Inertia
Basic idea: decouple rotor inertia from link
via mechanical elasticity
Heavy Light
Controllable Mechanical Compliance of the Joint

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Soft Robotics
Constant Passive Compliance
Variable Passive Compliance
•Compliance is fixed•Absorb impact effects•Adapt by changing the elastic element•Only one motor
•Compliance can be changed•Adapt to situations, e.g.:
• position a heavy load• move a glass of liquid
•Extra motor to alter compliance•Increased complexity

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
(Slowly) Variable Stiffness Arms
AMASC (Hurst 2004)
Mechanical Impedance Adjuster (T. Morita, 1995)

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Variable Stiffness Actuation
Quickly Variable Compliance
• Compliance can be changed with time constants comparable to motion• Adapt stiffness during tasks, e.g.:
•Robot arm: compliant in quick motion vs. stiff accurate end positioning•Legged locomotion: adapt to gaits and swing/stance phase
• (Larger) extra motor to alter compliance
Slowly Variable Compliance
• Compliance can be changed once per task • Adapt to nominally planned tasks• Extra motor to alter compliance

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
(Quickly) Variable Stiffness Arms
Compliant StiffVUB R&MM MACCEPA (R. Van Ham 2006)
UNIPI VSA-1 (2002)
Video

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
New VSA Design
Video 1: Principle
Video 2: Soft mode
Video 3: Stiff mode

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
What does ‘Performance’ mean?
•A concern – not unique – is promptness of response:
How long does it take to bring the arm to a prescribed position?• endless actuator authority perfectly safe in zero time
• different controllers produce different performance and risks for the same mechanism
• decouple mechanical performance from controloptimal control: the Safe Brachistocrone

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Safe Brachistochrone for VSA
The Safe Brachistocrone optimal control problem
The control of transmission compliance can recoverperformance
LinkInertia
RotorInertia
vrot vlinkuK Kcov
xrot xlink
uact
Safety & Control boundsVST Bounds

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Simulation results for VSA (rotor & link)
LinkInertia
RotorInertia
vrot vlinkutransm Kcov
xrot xlink
uact
The philosophy: Fast & Soft, Stiff & SlowH
ICTime

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Actuator for VSA: Stiffness Variation
Video

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Actuator for VSA: Stiffness Variation
Video
HIC results in the ramp accelerating phase for VSA

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Extending to more DOF’s
Impact at the elbow joint
Impact at the end effector
HIC values are calculated off-line by simulationat varying configuration, stiffness and velocity’s direction (constant module)
Analytical expression for the HIC is non-trivialin this case

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Extending to more DOF’s
Impact at the elbow joint
Impact at the end effector
HIC values are calculated off-line by simulationat varying configuration, stiffness and velocity’s direction (constant module)
Analytical expression for the HIC is non-trivialin this case
impact at the end of a link is not necessarily the worst case

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Impacts of a 2 DOF VSA arm
Elbow
End-effector
q2= 90o
q1 = 0

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Impacts of a 2 DOF VSA arm
5000

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Allowable range for directionsof the stiffness
ellipsoid minor axis
Stiffness Ellipsoid and HIC LocusStiffness ellipsoid: plotted by evaluating the eigenvalues and
eigenvectors of the matrix
The direction of the stiffness ellipsoid changes at varyingjoint stiffness
11
2001 −−−−⎟⎟⎠
⎞⎜⎜⎝
⎛==Σ J
KK
JKJJ TT

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Vee (safer)
Vee (dangerous)
Stiffness Ellipsoid and HIC Locus
HIC locus describes the injury level in case of impacts at the end-effector at varying the joints positions, stiffnessand direction of the e-e velocity. (compare with “belted inertia ellipsoids”).

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Stiffness Ellipsoid and HIC Locus
There is an intimate correlation between maximum HIC, maximum stiffness, and effective inertia at the e-e

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
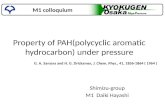
Trajectory/Stiffness Planning for a 2 DOF robot armFor a point-to-point minimum time/safe motion, the safe brachistochronealgorithm tends to align the minimum stiffness eigen-direction with (scaled) velocity
vv
vv

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Conclusions
• From stiff, heavy robots towards lightweight, soft robots
• Safety indices and tests• The variable stiffness approach • Towards n-dof’s• Much remains to be done:
– New hardware design– New planning problems– New control strategies

© Università di PisaColloquium on R&A - Napoli 18 Dec., 2006
Physical Human-Robot Interaction:Dependability, Safety, and Performance
Antonio BicchiThanks to:
Giovanni ToniettiRiccardo SchiaviSoumen Sen
Centro “E. Piaggio”University of Pisa