
Antilinear deformations of Coxeter groups, an …fring/Micro.pdf · Introduction Invariant Calogero...
96
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions Antilinear deformations of Coxeter groups, an application to Calogero models Andreas Fring Indian Statistical Institute Kolkata 21/04/2010 based on: A.F. and Monique Smith, arXiv:1004.0916
Transcript of Antilinear deformations of Coxeter groups, an …fring/Micro.pdf · Introduction Invariant Calogero...
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinear deformations of Coxeter groups,an application to Calogero models
Andreas Fring
Indian Statistical InstituteKolkata 21/04/2010
based on: A.F. and Monique Smith, arXiv:1004.0916
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinear deformations of Coxeter groups,an application to Calogero models
Andreas Fring
Indian Statistical InstituteKolkata 21/04/2010
based on: A.F. and Monique Smith, arXiv:1004.0916
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Outline
1 Introductiongeneral motivationPT-symmetry as an example of an antilinear operator
2 Possibilities to deform Calogero modelsaddition of PT-symmetric termrestriction of KdV sollutionsdeformation of dynamical variables⇔ def. of root space
3 Antilinear deformations of Coxeter groups4 An application to Calogero models5 Conclusions

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General motivation
Operators O which are left invariant under an antilinearinvolution I and whose eigenfunctions Φ also respect thissymmetry,
[O, I] = 0 ∧ IΦ = Φ
have a real eigenvalue spectrum.[E. Wigner, J. Math. Phys. 1 (1960) 409]
By defining a new metric also a consistent quantummechanical framework has been developed for theoriesinvolving such operators.In particular this also holds for O being non-Hermitian.
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General motivation
Operators O which are left invariant under an antilinearinvolution I and whose eigenfunctions Φ also respect thissymmetry,
[O, I] = 0 ∧ IΦ = Φ
have a real eigenvalue spectrum.[E. Wigner, J. Math. Phys. 1 (1960) 409]
By defining a new metric also a consistent quantummechanical framework has been developed for theoriesinvolving such operators.In particular this also holds for O being non-Hermitian.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Unbroken PT -symmetry guarantees real eigenvalues (QM)
PT -symmetry: PT : x → −x p → p i → −i(P : x → −x ,p → −p; T : x → x ,p → −p, i → −i)
PT is an anti-linear operator:
PT (λΦ + µΨ) = λ∗PT Φ + µ∗PT Ψ λ, µ ∈ C
Real eigenvalues from unbroken PT -symmetry:
[H,PT ] = 0 ∧ PT Φ = Φ ⇒ ε = ε∗ for HΦ = εΦ
Proof :εΦ = HΦ = HPT Φ = PT HΦ = PT εΦ = ε∗PT Φ = ε∗Φ

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetry as an example of an antilinear involution
Examples of non-Hermitian models in the literatureLattice Reggeon field theory
[J.L. Cardy, R. Sugar, Phys. Rev. D12 (1975) 2514]Quantum spin chains
[G. von Gehlen, J. Phys. A24 (1991) 5371]strings on AdS5 × S5-background
[A. Das, A. Melikyan, V. Rivelles, JHEP 09 (2007) 104]affine Toda field theory (β ∈ iR)deformed space-time structures
[B. Bagchi and A.F., Phys. Lett. A373 (2009) 4307]dynamical noncommutative space-time
[A.F., L. Gouba and F. Scholtz, arXiv:1003.3025 ]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
Extended Calogero models
HBK =p2
2+ω2
2
∑iq2
i +g2
2
∑i 6=k
1(qi − qk )2 +i g
∑i 6=k
1(qi − qk )
pi
with g, g ∈ R,q,p ∈ R`+1 (similarly for Bn)[B. Basu-Mallick, A. Kundu, Phys. Rev. B62 (2000) 9927]
Generalized Hamiltonian:
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p
· µ = 1/2∑
α∈∆ gαf (α · q)α, f (x) = 1/x V (x) = f 2(x)· includes also Sutherland-Moser potentials· ∆ is any root system, i.e. algebra independent· representation independent[A. F., Mod. Phys. Lett. A21 (2006) 691, Acta P. 47 (2007) 44]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
Extended Calogero models
HBK =p2
2+ω2
2
∑iq2
i +g2
2
∑i 6=k
1(qi − qk )2 +i g
∑i 6=k
1(qi − qk )
pi
with g, g ∈ R,q,p ∈ R`+1 (similarly for Bn)[B. Basu-Mallick, A. Kundu, Phys. Rev. B62 (2000) 9927]
Generalized Hamiltonian:
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p
· µ = 1/2∑
α∈∆ gαf (α · q)α, f (x) = 1/x V (x) = f 2(x)· includes also Sutherland-Moser potentials· ∆ is any root system, i.e. algebra independent· representation independent[A. F., Mod. Phys. Lett. A21 (2006) 691, Acta P. 47 (2007) 44]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
Extended Calogero models
HBK =p2
2+ω2
2
∑iq2
i +g2
2
∑i 6=k
1(qi − qk )2 +i g
∑i 6=k
1(qi − qk )
pi
with g, g ∈ R,q,p ∈ R`+1 (similarly for Bn)[B. Basu-Mallick, A. Kundu, Phys. Rev. B62 (2000) 9927]
Generalized Hamiltonian:
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p
· µ = 1/2∑
α∈∆ gαf (α · q)α, f (x) = 1/x V (x) = f 2(x)· includes also Sutherland-Moser potentials· ∆ is any root system, i.e. algebra independent· representation independent[A. F., Mod. Phys. Lett. A21 (2006) 691, Acta P. 47 (2007) 44]
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
- Not so obvious that one can re-write
Hµ =12
(p+iµ)2+12
∑α∈∆
g2αV (α·q), g2
α =
g2
s + α2s g2
s α ∈ ∆sg2
l + α2l g2
l α ∈ ∆l
⇒ Hµ = η−1hCalη with η = e−q·µ
- integrability follows trivially in L = [L,M]: L(p)→ L(p + iµ)
- computing backwards for any CMS-potential
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p − 1
2µ2
- µ2 = α2s g2
s∑α∈∆s
V (α · q) +α2l g2
l∑α∈∆l
V (α · q) only for V rational

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
- Not so obvious that one can re-write
Hµ =12
(p+iµ)2+12
∑α∈∆
g2αV (α·q), g2
α =
g2
s + α2s g2
s α ∈ ∆sg2
l + α2l g2
l α ∈ ∆l
⇒ Hµ = η−1hCalη with η = e−q·µ
- integrability follows trivially in L = [L,M]: L(p)→ L(p + iµ)
- computing backwards for any CMS-potential
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p − 1
2µ2
- µ2 = α2s g2
s∑α∈∆s
V (α · q) +α2l g2
l∑α∈∆l
V (α · q) only for V rational
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
- Not so obvious that one can re-write
Hµ =12
(p+iµ)2+12
∑α∈∆
g2αV (α·q), g2
α =
g2
s + α2s g2
s α ∈ ∆sg2
l + α2l g2
l α ∈ ∆l
⇒ Hµ = η−1hCalη with η = e−q·µ
- integrability follows trivially in L = [L,M]: L(p)→ L(p + iµ)
- computing backwards for any CMS-potential
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p − 1
2µ2
- µ2 = α2s g2
s∑α∈∆s
V (α · q) +α2l g2
l∑α∈∆l
V (α · q) only for V rational

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Adding PT-symmetric terms
- Not so obvious that one can re-write
Hµ =12
(p+iµ)2+12
∑α∈∆
g2αV (α·q), g2
α =
g2
s + α2s g2
s α ∈ ∆sg2
l + α2l g2
l α ∈ ∆l
⇒ Hµ = η−1hCalη with η = e−q·µ
- integrability follows trivially in L = [L,M]: L(p)→ L(p + iµ)
- computing backwards for any CMS-potential
Hµ =12
p2 +12
∑α∈∆
g2αV (α · q) + iµ · p − 1
2µ2
- µ2 = α2s g2
s∑α∈∆s
V (α · q) +α2l g2
l∑α∈∆l
V (α · q) only for V rational
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Deformed KdV-systems/Calogero models (Particle-field duality)
From real fields to complex particle systems
i) No restrictionse.g. Benjamin-Ono equation
ut + uux + λHuxx = 0 (*)
H ≡ Hilbert transform, i.e. Hu(x) = Pπ
∫∞−∞
u(x)z−x dz
Then
u(x , t) =λ
2
∑k=1
(i
x − zk− i
x − z∗k
)∈ R
satisfies (*) iff zk obeys the An-Calogero equ. of motion
zk =λ2
2
∑k 6=j
(zj − zk )−3
[H. Chen, N. Pereira, Phys. Fluids 22 (1979) 187][talk by J. Feinberg, PHHQP workshop VI, 2007, London ]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Deformed KdV-systems/Calogero models (Particle-field duality)
ii) restrict to submanifoldTheorem: [Airault, McKean, Moser, CPAM, (1977) 95 ]Given a Hamiltonian H(x1, . . . , xn, x1, . . . , xn) with flow
xi = ∂H/∂xi and xi = −∂H/∂xi i = 1, . . . ,n
and conserved charges Ij in involution with H,i.e.Ij ,H = 0. Then the locus of grad I = 0 is invariant.Example: Boussinesq equation
vtt = a(v2)xx + bvxxxx + vxx (**)
Thenv(x , t) = c
∑`
k=1(x − zk )−2
satisfies (**) iff b=1/12, c=-a/2 and zk obeys
zk = 2∑
j 6=k(zj − zk )−3 ⇔ zk = −∂H
∂zi
zk = 1−∑
j 6=k(zj − zk )−2 ⇔ grad(I3 − I1) = 0
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Deformed KdV-systems/Calogero models (Particle-field duality)
ii) restrict to submanifoldTheorem: [Airault, McKean, Moser, CPAM, (1977) 95 ]Given a Hamiltonian H(x1, . . . , xn, x1, . . . , xn) with flow
xi = ∂H/∂xi and xi = −∂H/∂xi i = 1, . . . ,n
and conserved charges Ij in involution with H,i.e.Ij ,H = 0. Then the locus of grad I = 0 is invariant.Example: Boussinesq equation
vtt = a(v2)xx + bvxxxx + vxx (**)
Thenv(x , t) = c
∑`
k=1(x − zk )−2
satisfies (**) iff b=1/12, c=-a/2 and zk obeys
zk = 2∑
j 6=k(zj − zk )−3 ⇔ zk = −∂H
∂zi
zk = 1−∑
j 6=k(zj − zk )−2 ⇔ grad(I3 − I1) = 0

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Deformed KdV-systems/Calogero models (Particle-field duality)
[P. Assis and A.F., J. Phys. A42 (2009) 425206]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Calogero-Moser-Sutherland models (deformed)
Calogero-Moser-Sutherland models (deformed)
HCMS =p2
2+
m2
16
∑α∈∆s
(α ·q)2 +12
∑α∈∆
gαV (α ·q) m,gα ∈ R
- invariance with respect to Coxter groupW
HCMS =σip · σip
2+
m2
16
∑α∈∆s
(α · σiq)2 +12
∑α∈∆
gαV (α · σiq)
=p2
2+
m2
16
∑α∈∆s
(σ−1i α · q)2 +
12
∑α∈∆
gαV (σ−1i α · q)
- aim: construct new models which are invariant underWPT
HPT CMS =p2
2+
m2
16
∑α∈∆s
(α·q)2+12
∑α∈∆
gαV (α·q), m,gα ∈ R
A2,G2: [A. F., M. Znojil, J. Phys. A41 (2008) 194010]all Coxeter groups: [A. F., Monique Smith, arXiv:1004.0916]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Calogero-Moser-Sutherland models (deformed)
Calogero-Moser-Sutherland models (deformed)
HCMS =p2
2+
m2
16
∑α∈∆s
(α ·q)2 +12
∑α∈∆
gαV (α ·q) m,gα ∈ R
- invariance with respect to Coxter groupW
HCMS =σip · σip
2+
m2
16
∑α∈∆s
(α · σiq)2 +12
∑α∈∆
gαV (α · σiq)
=p2
2+
m2
16
∑α∈∆s
(σ−1i α · q)2 +
12
∑α∈∆
gαV (σ−1i α · q)
- aim: construct new models which are invariant underWPT
HPT CMS =p2
2+
m2
16
∑α∈∆s
(α·q)2+12
∑α∈∆
gαV (α·q), m,gα ∈ R
A2,G2: [A. F., M. Znojil, J. Phys. A41 (2008) 194010]all Coxeter groups: [A. F., Monique Smith, arXiv:1004.0916]

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General strategy
Construction of antilinear deformationsInvolution ∈ W ≡ Coxeter group⇒ deform in antilinear wayFind a linear deformation map:
δ : ∆→ ∆(ε) α 7→ α = θεα
αi ∈ ∆ ⊂ Rn, αi(ε) ∈ ∆(ε) ⊂ Rn ⊕ ıRn, ε ∈ R∆(ε) remains invariant under an antilinear transformation ω
(i) ω : α = µ1α1 + µ2α2 7→ µ∗1ωα1 + µ∗2ωα2 for µ1, µ2 ∈ C(ii) ω2 = I(iii) ω : ∆→ ∆.
Candidates:- Weyl reflections: σi ∈ W- factors of Coxeter element: σ± ∈ W- longest element: ω0 ∈ W

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General strategy
Construction of antilinear deformationsInvolution ∈ W ≡ Coxeter group⇒ deform in antilinear wayFind a linear deformation map:
δ : ∆→ ∆(ε) α 7→ α = θεα
αi ∈ ∆ ⊂ Rn, αi(ε) ∈ ∆(ε) ⊂ Rn ⊕ ıRn, ε ∈ R∆(ε) remains invariant under an antilinear transformation ω
(i) ω : α = µ1α1 + µ2α2 7→ µ∗1ωα1 + µ∗2ωα2 for µ1, µ2 ∈ C(ii) ω2 = I(iii) ω : ∆→ ∆.
Candidates:- Weyl reflections: σi ∈ W- factors of Coxeter element: σ± ∈ W- longest element: ω0 ∈ W

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General strategy
Construction of antilinear deformationsInvolution ∈ W ≡ Coxeter group⇒ deform in antilinear wayFind a linear deformation map:
δ : ∆→ ∆(ε) α 7→ α = θεα
αi ∈ ∆ ⊂ Rn, αi(ε) ∈ ∆(ε) ⊂ Rn ⊕ ıRn, ε ∈ R∆(ε) remains invariant under an antilinear transformation ω
(i) ω : α = µ1α1 + µ2α2 7→ µ∗1ωα1 + µ∗2ωα2 for µ1, µ2 ∈ C(ii) ω2 = I(iii) ω : ∆→ ∆.
Candidates:- Weyl reflections: σi ∈ W- factors of Coxeter element: σ± ∈ W- longest element: ω0 ∈ W

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
General strategy
Construction of antilinear deformationsInvolution ∈ W ≡ Coxeter group⇒ deform in antilinear wayFind a linear deformation map:
δ : ∆→ ∆(ε) α 7→ α = θεα
αi ∈ ∆ ⊂ Rn, αi(ε) ∈ ∆(ε) ⊂ Rn ⊕ ıRn, ε ∈ R∆(ε) remains invariant under an antilinear transformation ω
(i) ω : α = µ1α1 + µ2α2 7→ µ∗1ωα1 + µ∗2ωα2 for µ1, µ2 ∈ C(ii) ω2 = I(iii) ω : ∆→ ∆.
Candidates:- Weyl reflections: σi ∈ W- factors of Coxeter element: σ± ∈ W- longest element: ω0 ∈ W

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• simple Weyl reflections:
σi(x) := x − 2x · αi
α2iαi , with 1 ≤ i ≤ ` ≡ rankW,
• general Coxeter transformations:
σ =∏`
i=1σi ,
• special Coxeter transformations:
σ := σ−σ+, σ± :=∏
i∈V±
σi , [σi , σj ] = 0 for i , j ∈ V±
A` :+−+−+
· · ·u u u u u• deformed Coxeter element factors:
σε± := θεσ±θ−1ε = τσ± : ∆(ε)→ ∆(ε),
τ ≡ complex conjugation

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• simple Weyl reflections:
σi(x) := x − 2x · αi
α2iαi , with 1 ≤ i ≤ ` ≡ rankW,
• general Coxeter transformations:
σ =∏`
i=1σi ,
• special Coxeter transformations:
σ := σ−σ+, σ± :=∏
i∈V±
σi , [σi , σj ] = 0 for i , j ∈ V±
A` :+−+−+
· · ·u u u u u• deformed Coxeter element factors:
σε± := θεσ±θ−1ε = τσ± : ∆(ε)→ ∆(ε),
τ ≡ complex conjugation

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• simple Weyl reflections:
σi(x) := x − 2x · αi
α2iαi , with 1 ≤ i ≤ ` ≡ rankW,
• general Coxeter transformations:
σ =∏`
i=1σi ,
• special Coxeter transformations:
σ := σ−σ+, σ± :=∏
i∈V±
σi , [σi , σj ] = 0 for i , j ∈ V±
A` :+−+−+
· · ·u u u u u• deformed Coxeter element factors:
σε± := θεσ±θ−1ε = τσ± : ∆(ε)→ ∆(ε),
τ ≡ complex conjugation

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• simple Weyl reflections:
σi(x) := x − 2x · αi
α2iαi , with 1 ≤ i ≤ ` ≡ rankW,
• general Coxeter transformations:
σ =∏`
i=1σi ,
• special Coxeter transformations:
σ := σ−σ+, σ± :=∏
i∈V±
σi , [σi , σj ] = 0 for i , j ∈ V±
A` :+−+−+
· · ·u u u u u• deformed Coxeter element factors:
σε± := θεσ±θ−1ε = τσ± : ∆(ε)→ ∆(ε),
τ ≡ complex conjugation
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• deformed Coxeter element:
σε := θεσθ−1ε = σε−σ
ε+ = τ2σ−σ+ = σ : ∆(ε)→ ∆(ε),
⇒[σ, θε] = 0
• deformed Coxeter orbits:
Ωεi :=
γ i , σεγ i , σ
2ε γ i , . . . , σ
h−1ε γ i
= θεΩi
with γ i = ci αi , ci = ± for i ∈ V±• deformed root space:
∆(ε) :=⋃`
i=1Ωε
i = θε∆(ε)
• invariance:
σε± : ∆(ε)→ θεσ±θ−1ε ∆(ε) = θεσ±∆(ε) = θε∆(ε) = ∆(ε)
• limit limε→0:
limε→0
αi(ε) = αi limε→0
∆(ε) = ∆
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• deformed Coxeter element:
σε := θεσθ−1ε = σε−σ
ε+ = τ2σ−σ+ = σ : ∆(ε)→ ∆(ε),
⇒[σ, θε] = 0
• deformed Coxeter orbits:
Ωεi :=
γ i , σεγ i , σ
2ε γ i , . . . , σ
h−1ε γ i
= θεΩi
with γ i = ci αi , ci = ± for i ∈ V±• deformed root space:
∆(ε) :=⋃`
i=1Ωε
i = θε∆(ε)
• invariance:
σε± : ∆(ε)→ θεσ±θ−1ε ∆(ε) = θεσ±∆(ε) = θε∆(ε) = ∆(ε)
• limit limε→0:
limε→0
αi(ε) = αi limε→0
∆(ε) = ∆

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• deformed Coxeter element:
σε := θεσθ−1ε = σε−σ
ε+ = τ2σ−σ+ = σ : ∆(ε)→ ∆(ε),
⇒[σ, θε] = 0
• deformed Coxeter orbits:
Ωεi :=
γ i , σεγ i , σ
2ε γ i , . . . , σ
h−1ε γ i
= θεΩi
with γ i = ci αi , ci = ± for i ∈ V±• deformed root space:
∆(ε) :=⋃`
i=1Ωε
i = θε∆(ε)
• invariance:
σε± : ∆(ε)→ θεσ±θ−1ε ∆(ε) = θεσ±∆(ε) = θε∆(ε) = ∆(ε)
• limit limε→0:
limε→0
αi(ε) = αi limε→0
∆(ε) = ∆

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• deformed Coxeter element:
σε := θεσθ−1ε = σε−σ
ε+ = τ2σ−σ+ = σ : ∆(ε)→ ∆(ε),
⇒[σ, θε] = 0
• deformed Coxeter orbits:
Ωεi :=
γ i , σεγ i , σ
2ε γ i , . . . , σ
h−1ε γ i
= θεΩi
with γ i = ci αi , ci = ± for i ∈ V±• deformed root space:
∆(ε) :=⋃`
i=1Ωε
i = θε∆(ε)
• invariance:
σε± : ∆(ε)→ θεσ±θ−1ε ∆(ε) = θεσ±∆(ε) = θε∆(ε) = ∆(ε)
• limit limε→0:
limε→0
αi(ε) = αi limε→0
∆(ε) = ∆

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• deformed Coxeter element:
σε := θεσθ−1ε = σε−σ
ε+ = τ2σ−σ+ = σ : ∆(ε)→ ∆(ε),
⇒[σ, θε] = 0
• deformed Coxeter orbits:
Ωεi :=
γ i , σεγ i , σ
2ε γ i , . . . , σ
h−1ε γ i
= θεΩi
with γ i = ci αi , ci = ± for i ∈ V±• deformed root space:
∆(ε) :=⋃`
i=1Ωε
i = θε∆(ε)
• invariance:
σε± : ∆(ε)→ θεσ±θ−1ε ∆(ε) = θεσ±∆(ε) = θε∆(ε) = ∆(ε)
• limit limε→0:
limε→0
αi(ε) = αi limε→0
∆(ε) = ∆

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• take θε to be an isometry:
αi · αj = αi · αj .
⇒θ∗ε = θ−1
ε and det θε = ±1
Summary: properties of θε(i) θ∗εσ± = σ±θε
(ii) [σ, θε] = 0(iii) θ∗ε = θ−1
ε
(iv) det θε = ±1(v) limε→0 θε = I
Solutions?

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• take θε to be an isometry:
αi · αj = αi · αj .
⇒θ∗ε = θ−1
ε and det θε = ±1
Summary: properties of θε(i) θ∗εσ± = σ±θε
(ii) [σ, θε] = 0(iii) θ∗ε = θ−1
ε
(iv) det θε = ±1(v) limε→0 θε = I
Solutions?
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
• take θε to be an isometry:
αi · αj = αi · αj .
⇒θ∗ε = θ−1
ε and det θε = ±1
Summary: properties of θε(i) θ∗εσ± = σ±θε
(ii) [σ, θε] = 0(iii) θ∗ε = θ−1
ε
(iv) det θε = ±1(v) limε→0 θε = I
Solutions?

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
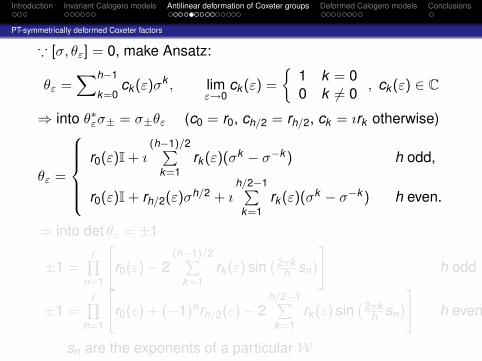
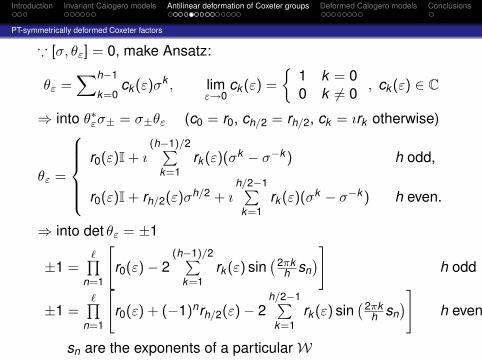
∵ [σ, θε] = 0, make Ansatz:
θε =∑h−1
k=0ck (ε)σk , lim
ε→0ck (ε) =
1 k = 00 k 6= 0
, ck (ε) ∈ C
⇒ into θ∗εσ± = σ±θε (c0 = r0, ch/2 = rh/2, ck = ırk otherwise)
θε =
r0(ε)I + ı
(h−1)/2∑k=1
rk (ε)(σk − σ−k ) h odd,
r0(ε)I + rh/2(ε)σh/2 + ıh/2−1∑k=1
rk (ε)(σk − σ−k ) h even.
⇒ into det θε = ±1
±1 =∏
n=1
[r0(ε)− 2
(h−1)/2∑k=1
rk (ε) sin(2πk
h sn)]
h odd
±1 =∏
n=1
[r0(ε) + (−1)nrh/2(ε)− 2
h/2−1∑k=1
rk (ε) sin(2πk
h sn)]
h even
sn are the exponents of a particularW
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
∵ [σ, θε] = 0, make Ansatz:
θε =∑h−1
k=0ck (ε)σk , lim
ε→0ck (ε) =
1 k = 00 k 6= 0
, ck (ε) ∈ C
⇒ into θ∗εσ± = σ±θε (c0 = r0, ch/2 = rh/2, ck = ırk otherwise)
θε =
r0(ε)I + ı
(h−1)/2∑k=1
rk (ε)(σk − σ−k ) h odd,
r0(ε)I + rh/2(ε)σh/2 + ıh/2−1∑k=1
rk (ε)(σk − σ−k ) h even.
⇒ into det θε = ±1
±1 =∏
n=1
[r0(ε)− 2
(h−1)/2∑k=1
rk (ε) sin(2πk
h sn)]
h odd
±1 =∏
n=1
[r0(ε) + (−1)nrh/2(ε)− 2
h/2−1∑k=1
rk (ε) sin(2πk
h sn)]
h even
sn are the exponents of a particularW
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
∵ [σ, θε] = 0, make Ansatz:
θε =∑h−1
k=0ck (ε)σk , lim
ε→0ck (ε) =
1 k = 00 k 6= 0
, ck (ε) ∈ C
⇒ into θ∗εσ± = σ±θε (c0 = r0, ch/2 = rh/2, ck = ırk otherwise)
θε =
r0(ε)I + ı
(h−1)/2∑k=1
rk (ε)(σk − σ−k ) h odd,
r0(ε)I + rh/2(ε)σh/2 + ıh/2−1∑k=1
rk (ε)(σk − σ−k ) h even.
⇒ into det θε = ±1
±1 =∏
n=1
[r0(ε)− 2
(h−1)/2∑k=1
rk (ε) sin(2πk
h sn)]
h odd
±1 =∏
n=1
[r0(ε) + (−1)nrh/2(ε)− 2
h/2−1∑k=1
rk (ε) sin(2πk
h sn)]
h even
sn are the exponents of a particularW

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
Now case-by-case∆(ε) for A3
θε = r0I + r2σ2 + ır1
(σ − σ3
)with explicit representation
σ1 =
−1 0 01 1 00 0 1
, σ2 =
1 1 00 −1 00 1 1
,
σ3 =
1 0 00 1 10 0 −1
, σ =
−1 −1 01 1 10 −1 −1
,
σ− = σ1σ3, σ+ = σ2, σ = σ−σ+
θε =
r0 − ır1 −2ır1 −ır1 − r22ır1 r0 − r2 + 2ır1 2ır1
−ır1 − r2 −2ır1 r0 − ır1

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
all constraints require
(r0 + r2)[(r0 + r2)2 − 4r2
1
]= 1
r0 − r2 + 2r1 = (r0 − r2 + 2r1) (r0 + r2)
(r0 + r2) = (r0 − r2)2 − 4r21
these are solved by
r0(ε) = cosh ε, r1(ε) = ±√
cosh2 ε− cosh ε, r2(ε) = 1−cosh ε
⇒ simple deformed roots
α1 =cosh εα1 + (cosh ε− 1)α3−ı√
2√
cosh ε sinh( ε
2
)(α1+2α2+α3) ,
α2 =(2 cosh ε− 1)α2 + 2ı√
2√
cosh ε sinh( ε
2
)(α1 + α2 + α3) ,
α3 =cosh εα3 + (cosh ε− 1)α1−ı√
2√
cosh ε sinh( ε
2
)(α1+2α2+α3) .
remaining positive rootsα4 := α1 + α2, α5 := α2 + α3, α6 := α1 + α2 + α3.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
∆(ε) for A4n−1-subseriesclosed solution
θε = r0I + r2nσ2n + ırn
(σn − σ−n) ,
- with r2n = 1− r0, rn = ±√
r20 − r0
- useful choice r0 = cosh ε∆(ε) for E6
θε =
r0 −2ır2 0 −2ır2 −2ır2 −ır22ır2 r0 + ır2 2ır2 2ır2 2ır2 2ır20 2ır2 r0 + 2ır2 4ır2 3ır2 2ır2−2ır2 −2ır2 −4ır2 r0 − 5ır2 −4ır2 −2ır22ır2 2ır2 3ır2 4ır2 r0 + 2ır2 0−ır2 −2ır2 −2ır2 −2ır2 0 r0
r2 = ±1/
√3√
r20 − 1 , r0 = cosh ε
∆(ε) for B2n+1-subseriesno solution

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
∆(ε) for A4n−1-subseriesclosed solution
θε = r0I + r2nσ2n + ırn
(σn − σ−n) ,
- with r2n = 1− r0, rn = ±√
r20 − r0
- useful choice r0 = cosh ε∆(ε) for E6
θε =
r0 −2ır2 0 −2ır2 −2ır2 −ır22ır2 r0 + ır2 2ır2 2ır2 2ır2 2ır20 2ır2 r0 + 2ır2 4ır2 3ır2 2ır2−2ır2 −2ır2 −4ır2 r0 − 5ır2 −4ır2 −2ır22ır2 2ır2 3ır2 4ır2 r0 + 2ır2 0−ır2 −2ır2 −2ır2 −2ır2 0 r0
r2 = ±1/
√3√
r20 − 1 , r0 = cosh ε
∆(ε) for B2n+1-subseriesno solution

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
∆(ε) for A4n−1-subseriesclosed solution
θε = r0I + r2nσ2n + ırn
(σn − σ−n) ,
- with r2n = 1− r0, rn = ±√
r20 − r0
- useful choice r0 = cosh ε∆(ε) for E6
θε =
r0 −2ır2 0 −2ır2 −2ır2 −ır22ır2 r0 + ır2 2ır2 2ır2 2ır2 2ır20 2ır2 r0 + 2ır2 4ır2 3ır2 2ır2−2ır2 −2ır2 −4ır2 r0 − 5ır2 −4ır2 −2ır22ır2 2ır2 3ır2 4ır2 r0 + 2ır2 0−ır2 −2ır2 −2ır2 −2ır2 0 r0
r2 = ±1/
√3√
r20 − 1 , r0 = cosh ε
∆(ε) for B2n+1-subseriesno solution

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Coxeter factors
Solutions from folding
for instance: Bn → A2n-deformed A6-roots:
α1 = cosh εα1 − ı/√
7 sinh ε(α1 + 2α2 + 2α3 + 2α4 − 2α6)
α2 = cosh εα2 + ı/√
7 sinh ε(2α1 + 3α2 + 4α3 + 2α4)
α3 = cosh εα3 − ı/√
7 sinh ε(2α1 + 4α2 + 3α3 + 2α4 + 2α5 + 2α6)
α4 = cosh εα4 + ı/√
7 sinh ε(2α1 + 2α2 + 2α3 + 3α4 + 4α5 + 2α6)
α5 = cosh εα5 − ı/√
7 sinh ε(2α3 + 4α4 + 3α5 + 2α6),
α6 = cosh εα6 − ı/√
7 sinh ε(2α1 − 2α3 − 2α4 − 2α5 − α6)
⇒ deformed simple B3-roots as (αij := αi − αj )
β1 = α1 + α6 = cosh ε(α1 + α6)−ı/√
7 sinh ε[3(α1 − α6) + 2(α2 − α5)]
β2 = α2 + α5 = cosh ε(α2 + α5)+ı/√
7 sinh ε[2(α16 + α34) + α25]
β3 = α3 + α4 = cosh ε(α1 + α6)−ı/√
7 sinh ε[2(α2 − α5) + α3 − α4]
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
CT-symmetrically deformed longest element
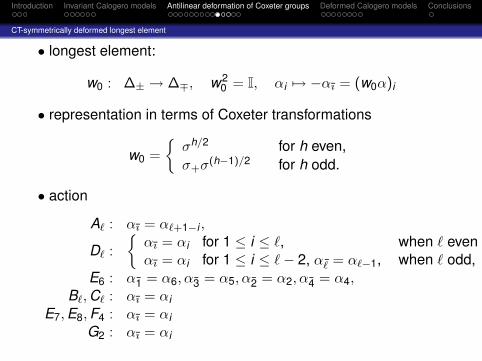
• longest element:
w0 : ∆± → ∆∓, w20 = I, αi 7→ −αı = (w0α)i
• representation in terms of Coxeter transformations
w0 =
σh/2 for h even,σ+σ
(h−1)/2 for h odd.
• action
A` : αı = α`+1−i ,
D` :
αı = αi for 1 ≤ i ≤ `, when ` evenαı = αi for 1 ≤ i ≤ `− 2, α¯ = α`−1, when ` odd,
E6 : α1 = α6, α3 = α5, α2 = α2, α4 = α4,B`,C` : αı = αi
E7,E8,F4 : αı = αiG2 : αı = αi

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
CT-symmetrically deformed longest element
A` :α`α`−1α3α2α1
· · ·u u u u u −w0−→α1α2α3α`−1α`
· · · uuuu uD2`+1 :
α2`+1
α2`
α2`−1α3α2α1· · ·
@@
u u u u u
u−w0−→
α2`
α2`+1
α2`−1α3α2α1· · ·
@@
u u u u u
uE6 :
α6α5α4α3
α2
α1
uu u u uu −w0−→
uu u u uu α1α3α4α5
α2
α6
• two cases:
[σ, θε] = 0⇒
no solution for h evenprevious solutions for h odd
[σ, θε] 6= 0, θ∗εw0 = w0θε, θ∗ε = θ−1ε , det θε = ±1 lim
ε→0θε = I

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
CT-symmetrically deformed longest element
Solutions:
∆(ε) for A3
θε =
cosh ε 0 ı sinh ε(− sinh2 ε
2 + ı2 sinh ε) 1 (− sinh2 ε
2 −ı2 sinh ε)
−ı sinh ε 0 cosh ε
∆(ε) for E6
θε =
1 0 0 00 1 0 00 0 θA3
ε 00 0 0 1
,

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
PT-symmetrically deformed Weyl reflections
Deformed Weyl reflections
This construction only works for groups of rank 2.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Construction of new models
For any model based on roots, these deformed roots can beused to define new invariant models simply by
α→ α.
For instance Calogero models:

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Generalization of Calogero’s solution, undeformed case
• generalized Calogero Hamiltionian (undeformed)
HC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2 ,
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2,
h ≡ dual Coxeter number, t` ≡ `-th symmetrizer of I• Ansatz:
ψ(q)→ ψ(z, r) = zκ+1/2ϕ(r)
⇒ solution for κ = 1/2√
1 + 4g.
ϕn(r) = cn exp
−√
ht`2ω
2r2
Lan
√ ht`2ωr2
.
Lan(x) ≡ Laguerre polynomial, a =
(2 + h + h
√1 + 4g
)l/4− 1

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Generalization of Calogero’s solution, undeformed case
• generalized Calogero Hamiltionian (undeformed)
HC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2 ,
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2,
h ≡ dual Coxeter number, t` ≡ `-th symmetrizer of I• Ansatz:
ψ(q)→ ψ(z, r) = zκ+1/2ϕ(r)
⇒ solution for κ = 1/2√
1 + 4g.
ϕn(r) = cn exp
−√
ht`2ω
2r2
Lan
√ ht`2ωr2
.
Lan(x) ≡ Laguerre polynomial, a =
(2 + h + h
√1 + 4g
)l/4− 1

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Generalization of Calogero’s solution, undeformed case
• generalized Calogero Hamiltionian (undeformed)
HC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2 ,
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2,
h ≡ dual Coxeter number, t` ≡ `-th symmetrizer of I• Ansatz:
ψ(q)→ ψ(z, r) = zκ+1/2ϕ(r)
⇒ solution for κ = 1/2√
1 + 4g.
ϕn(r) = cn exp
−√
ht`2ω
2r2
Lan
√ ht`2ωr2
.
Lan(x) ≡ Laguerre polynomial, a =
(2 + h + h
√1 + 4g
)l/4− 1

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Generalization of Calogero’s solution, undeformed case
• eigenenergies
En =14
[(2 + h + h
√1 + 4g
)l + 8n
]√ ht`2ω
• anyonic exchange factors
ψ(q1, . . . ,qi ,qj , . . .qn) = eıπsψ(q1, . . . ,qj ,qi , . . .qn), for 1 ≤ i , j ≤ n,
withs =
12
+12
√1 + 4g
∵ r is symmetric and z antisymmetric
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Generalization of Calogero’s solution, undeformed case
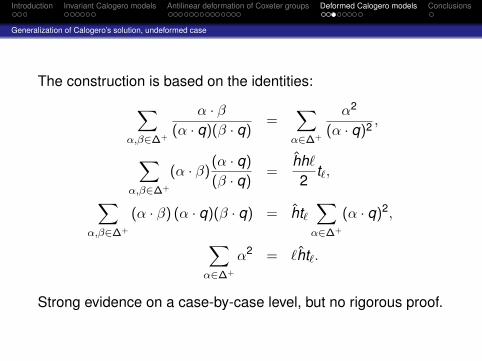
The construction is based on the identities:∑α,β∈∆+
α · β(α · q)(β · q)
=∑α∈∆+
α2
(α · q)2 ,
∑α,β∈∆+
(α · β)(α · q)
(β · q)=
hh`2
t`,∑α,β∈∆+
(α · β) (α · q)(β · q) = ht`∑α∈∆+
(α · q)2,
∑α∈∆+
α2 = `ht`.
Strong evidence on a case-by-case level, but no rigorous proof.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
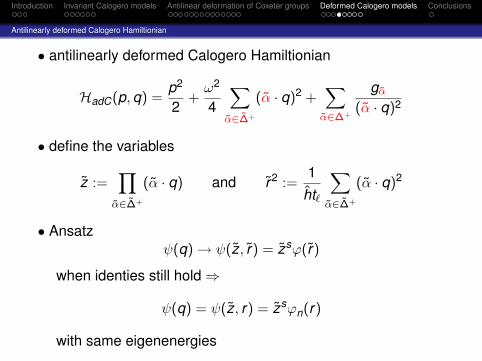
Antilinearly deformed Calogero Hamiltionian
• antilinearly deformed Calogero Hamiltionian
HadC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2
• Ansatzψ(q)→ ψ(z, r) = zsϕ(r)
when identies still hold⇒
ψ(q) = ψ(z, r) = zsϕn(r)
with same eigenenergies

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• antilinearly deformed Calogero Hamiltionian
HadC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2
• Ansatzψ(q)→ ψ(z, r) = zsϕ(r)
when identies still hold⇒
ψ(q) = ψ(z, r) = zsϕn(r)
with same eigenenergies

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• antilinearly deformed Calogero Hamiltionian
HadC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2
• Ansatzψ(q)→ ψ(z, r) = zsϕ(r)
when identies still hold⇒
ψ(q) = ψ(z, r) = zsϕn(r)
with same eigenenergies
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• antilinearly deformed Calogero Hamiltionian
HadC(p,q) =p2
2+ω2
4
∑α∈∆+
(α · q)2 +∑α∈∆+
gα(α · q)2
• define the variables
z :=∏α∈∆+
(α · q) and r2 :=1
ht`
∑α∈∆+
(α · q)2
• Ansatzψ(q)→ ψ(z, r) = zsϕ(r)
when identies still hold⇒
ψ(q) = ψ(z, r) = zsϕn(r)
with same eigenenergies

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
Deformed A3-models
• potential from deformed Coxeter group factorsα1 = 1,−1,0,0, α2 = 0,1,−1,0, α3 = 0,0,1,−1
α1 · q = q43 + cosh ε(q12 + q34)− ı√
2 cosh ε sinhε
2(q13 + q24)
α2 · q = q23(2 cosh ε− 1) + ı2√
2 cosh ε sinhε
2q14
α3 · q = q21 + cosh ε(q12 + q34)− ı√
2 cosh ε sinhε
2(q13 + q24)
α4 · q = q42 + cosh ε(q13 + q24) + ı√
2 cosh ε sinhε
2(q12 + q34)
α5 · q = q31 + cosh ε(q13 + q24) + ı√
2 cosh ε sinhε
2(q12 + q34)
α6 · q = q14(2 cosh ε− 1)− ı√
2 cosh ε sinhε
2q23
notation qij = qi − qj , No longer singular for qij = 0

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
Deformed A3-models
• potential from deformed Coxeter group factorsα1 = 1,−1,0,0, α2 = 0,1,−1,0, α3 = 0,0,1,−1
α1 · q = q43 + cosh ε(q12 + q34)− ı√
2 cosh ε sinhε
2(q13 + q24)
α2 · q = q23(2 cosh ε− 1) + ı2√
2 cosh ε sinhε
2q14
α3 · q = q21 + cosh ε(q12 + q34)− ı√
2 cosh ε sinhε
2(q13 + q24)
α4 · q = q42 + cosh ε(q13 + q24) + ı√
2 cosh ε sinhε
2(q12 + q34)
α5 · q = q31 + cosh ε(q13 + q24) + ı√
2 cosh ε sinhε
2(q12 + q34)
α6 · q = q14(2 cosh ε− 1)− ı√
2 cosh ε sinhε
2q23
notation qij = qi − qj , No longer singular for qij = 0

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• PT -symmetry for α
σε− : α1 → −α1, α2 → α6, α3 → −α3, α4 → α5, α5 → α4, α6 → α2
σε+ : α1 → α4, α2 → −α2, α3 → α5, α4 → α1, α5 → α3, α6 → α6
• PT -symmetry in dual space
σε− : q1 → q2, q2 → q1, q3 → q4, q4 → q3, ı→ −ıσε+ : q1 → q1, q2 → q3, q3 → q2, q4 → q4, ı→ −ı
⇒
σε−z(q1,q2,q3,q4) = z∗(q2,q1,q4,q3) = z(q1,q2,q3,q4)
σε+z(q1,q2,q3,q4) = z∗(q1,q3,q2,q4) = −z(q1,q2,q3,q4)
ψ(q1,q2,q3,q4) = eıπsψ(q2,q4,q1,q3).

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• PT -symmetry for α
σε− : α1 → −α1, α2 → α6, α3 → −α3, α4 → α5, α5 → α4, α6 → α2
σε+ : α1 → α4, α2 → −α2, α3 → α5, α4 → α1, α5 → α3, α6 → α6
• PT -symmetry in dual space
σε− : q1 → q2, q2 → q1, q3 → q4, q4 → q3, ı→ −ıσε+ : q1 → q1, q2 → q3, q3 → q2, q4 → q4, ı→ −ı
⇒
σε−z(q1,q2,q3,q4) = z∗(q2,q1,q4,q3) = z(q1,q2,q3,q4)
σε+z(q1,q2,q3,q4) = z∗(q1,q3,q2,q4) = −z(q1,q2,q3,q4)
ψ(q1,q2,q3,q4) = eıπsψ(q2,q4,q1,q3).

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• PT -symmetry for α
σε− : α1 → −α1, α2 → α6, α3 → −α3, α4 → α5, α5 → α4, α6 → α2
σε+ : α1 → α4, α2 → −α2, α3 → α5, α4 → α1, α5 → α3, α6 → α6
• PT -symmetry in dual space
σε− : q1 → q2, q2 → q1, q3 → q4, q4 → q3, ı→ −ıσε+ : q1 → q1, q2 → q3, q3 → q2, q4 → q4, ı→ −ı
⇒
σε−z(q1,q2,q3,q4) = z∗(q2,q1,q4,q3) = z(q1,q2,q3,q4)
σε+z(q1,q2,q3,q4) = z∗(q1,q3,q2,q4) = −z(q1,q2,q3,q4)
ψ(q1,q2,q3,q4) = eıπsψ(q2,q4,q1,q3).

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
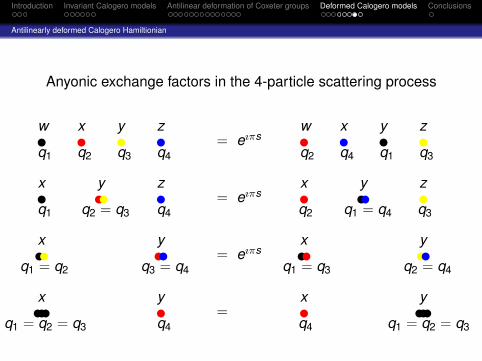
Anyonic exchange factors in the 4-particle scattering process
u u u uw x y z
q1 q2 q3 q4= eıπs u u u uw x y z
q2 q4 q1 q3
u uu ux y z
q2 = q3q1 q4= eıπs u uu ux y z
q2 q1 = q4 q3
uu uux y
q1 = q2 q3 = q4= eıπs uu uux y
q1 = q3 q2 = q4
uuu ux y
q1 = q2 = q3 q4= u uuux y
q4 q1 = q2 = q3

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
Anyonic exchange factors in the 4-particle scattering process
u u u uw x y z
q1 q2 q3 q4= eıπs u u u uw x y z
q2 q4 q1 q3
u uu ux y z
q2 = q3q1 q4= eıπs u uu ux y z
q2 q1 = q4 q3
uu uux y
q1 = q2 q3 = q4= eıπs uu uux y
q1 = q3 q2 = q4
uuu ux y
q1 = q2 = q3 q4= u uuux y
q4 q1 = q2 = q3

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
Anyonic exchange factors in the 4-particle scattering process
u u u uw x y z
q1 q2 q3 q4= eıπs u u u uw x y z
q2 q4 q1 q3
u uu ux y z
q2 = q3q1 q4= eıπs u uu ux y z
q2 q1 = q4 q3
uu uux y
q1 = q2 q3 = q4= eıπs uu uux y
q1 = q3 q2 = q4
uuu ux y
q1 = q2 = q3 q4= u uuux y
q4 q1 = q2 = q3
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
Anyonic exchange factors in the 4-particle scattering process
u u u uw x y z
q1 q2 q3 q4= eıπs u u u uw x y z
q2 q4 q1 q3
u uu ux y z
q2 = q3q1 q4= eıπs u uu ux y z
q2 q1 = q4 q3
uu uux y
q1 = q2 q3 = q4= eıπs uu uux y
q1 = q3 q2 = q4
uuu ux y
q1 = q2 = q3 q4= u uuux y
q4 q1 = q2 = q3
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Antilinearly deformed Calogero Hamiltionian
• Physical properties of the A2,G2-models:The deformed model can be solved by separation ofvariables as the undeformed case.Some restrictions cease to exist, as the wavefunctions arenow regularized.⇒ modified energy spectrum:
E = 2 |ω| (2n + λ+ 1)
becomes
E±n` = 2|ω|[2n + 6(κ±s + κ±l + `) + 1
]for n, ` ∈ N0,
with κ±s/l = (1±√
1 + 4gs/l)/4

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.

Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.
Introduction Invariant Calogero models Antilinear deformation of Coxeter groups Deformed Calogero models Conclusions
Conclusions
ConclusionsWe provided antilinear deformations of Coxeter groupsInvariant Coxeter models can be constructed with newphysical propertiesOpen issues:
mathematical constructionmost general solution, closed formulae for infinite seriesrelaxing some constraintssolutions for unsolvable casesother elements inW
Calogero modelsproof for identitiesfurther solutions to Schrödinger equationHermitian counterparts
integrability of deformed models?application to other models
Thank you for your attention.


















