Annalisa Calini (joint work with Tom Ivey and Gloria Mar´ı ...€¦ · Annalisa Calini (joint...
34
Geometric flows in centro-affine space Annalisa Calini (joint work with Tom Ivey and Gloria Mar´ ı-Beffa) Geometry, Dynamics and Mechanics Seminar September 22, 2020 Partially supported by the NSF through DMS-0804541 (G-MB) and DMS-1109017 (AC) 1 / 34
Transcript of Annalisa Calini (joint work with Tom Ivey and Gloria Mar´ı ...€¦ · Annalisa Calini (joint...
-
Geometric flows in centro-affine space
Annalisa Calini
(joint work with Tom Ivey and Gloria Marı́-Beffa)
Geometry, Dynamics and Mechanics SeminarSeptember 22, 2020
Partially supported by the NSF through DMS-0804541 (G-MB) and DMS-1109017 (AC)
1 / 34
-
Outline
1 Take-home points
2 Moving frames and integrabilityMotivation: curves in Euclidean spaceExample: the Vortex Filament Equation (VFE)Integrable hierarchies
3 What about the KdV equation?Pinkall’s flowCurves in RP1 and moving framesGeometric Hamiltonian structures (KdV)
4 Discrete settingProjective twisted polygons and centroaffine liftsDiscretizations of the AGD flowsBi-hamiltonian structure and pre-symplectic forms
2 / 34
-
Take-home points
Take-home points
Geometric evolution equations are “integrable” if the evolutions of theirgeometric invariants are integrable.
Famous case: vortex filament equation (binormal flow)→ focusingnonlinear Schrödinger equation:
γt = γx × γxx = κB −→ iqt + qss + 2|q|2q = 0Invariant moving frames for the evolving geometric object andpreservation of the lowest order invariant (e.g. arc length for curves) bythe evolution appear to be key to integrability.
Sometimes, the geometric picture is simpler and clearer than that at thelevel of the invariants. In this talk, the former will reveal the integrabilityof the latter.
3 / 34
-
Moving frames and integrability
Moving Frames and Integrability
4 / 34
-
Moving frames and integrability Motivation: curves in Euclidean space
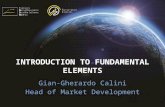
Curves in Euclidean space and moving framesRecall the Frenet equations of classical curve theory:
Ts = κN, Ns = −κT + τB, Bs = −τN.
The unit tangent T(s), normal N(s),and binormal B(s) form an (adapted)orthonormal frame along an arc lengthparametrized curve γ(s). The curvatureκ(s) 6= 0 and torsion τ(s) describe theshape of of the curve.
N
B
x
y0
z
r
T
Sometimes, natural Frenet systems are more convenient:Ts = κ1U1 + κ2U2, (U1)s = −κ1T + σU2, (U2)s = −κ2T − σU1,
where σ is a constant. (Frames of least rotation, σ = 0, are described inBishop, 1975.) The relation with the classical Frenet system is
U1 + iU2 = (N + iB)eiθ, κ1 + iκ2 = κeiθ, θ =∫ s(τ(u) − σ) du.
5 / 34
-
Moving frames and integrability Motivation: curves in Euclidean space
The natural frame (T,U1,U2) can be represented in terms of skew-hermitianmatrices, via the isometry
(R3, ·) −→ (su(2), < , >)x −→ ∑3k=1 xkEk.
Here, the triplet
E1 =(−i 00 i
), E2 =
(0 1−1 0
), E3 =
(0 ii 0
)
forms an orthonormal basis for the Lie algebra su(2) with the inner product< A,B >= −12 trace(AB), and satisfies [Ei,Ej] = −2�ijkEk.
Since SU(2) acts transitively on orthonormal frames, there isΩ ∈ SU(2) thatconjugates (T,U1,U2) to (E1,E2,E3):
T = Ω−1E1Ω, U1 = Ω−1E2Ω, U2 = Ω−1E3Ω.
6 / 34
-
Moving frames and integrability Motivation: curves in Euclidean space
Rewriting the natural frame system in terms ofΩ:
Ts = κ1U1 + κ2U2 ⇒ [E1,ΩsΩ−1] = κ1E2 + κ2E3,Us = −κ1T + σU2 ⇒ [E2,ΩsΩ−1] = −κ1E1 + λE3,
leads toΩsΩ−1 =σ
2E1 −
κ2
2E2 +
κ1
2E3 or, setting σ = 2λ and
q = 12(k1 + ik2) =12κe
iθ.
We obtain
Ωs =
(−iλ iqiq̄ iλ
)Ω,
recognizable as the eigenvalue problem of the AKNS system1with λ asspectral parameter. Thus, the AKNS eigenvalue problem arises as the2λ-natural Frenet system for a space curve of curvature κ and torsion τ.
1The “Lax Pair” of several well-known soliton equations including mKdV, NLS, and sG.7 / 34
-
Moving frames and integrability Motivation: curves in Euclidean space
Consequences1. Let Ψ be a fundamental matrix solution of the AKNS spectral problem withΨ(0) = I. Then, for λ ∈ R, the skew-hermitian matrix
Γ = Ψ−1dΨdλ
=
(−iγ1 γ2 + iγ3
−γ2 + iγ3 iγ1
)gives the position vector of a curve γ = (γ1, γ2, γ3) of curvature κ = |q| andtorsion τ = dds arg(q) − 2λ. (Sym, Pohlmeyer.)
2. Integrable curve flows2 arise from adjoining compatible arc lengthpreserving time evolutions to the natural frame systemΩs = U(q(s, t); λ)Ω:
Ωt = V(q(s, t); λ)Ω, V ∈ su(2),
so that the resulting zero curvature condition
Ut − Vs + [U ,V] = 0
is independent of the spectral parameter λ.2Those inducing completely integrable PDE for curvature and torsion.
8 / 34
-
Moving frames and integrability Example: the Vortex Filament Equation (VFE)
Example: the Vortex Filament Equation
The compatible frame evolution
Ωt =
(i(|q|2 − 2λ2) 2iλq − qs
2iλq̄ − q̄s i(2λ2 − |q|2)
)Ω
gives rise to the focusing NLS equation
iqt + qss + 2|q|2q = 0 (fNLS)
for the complex curvature q, and to the Vortex Filament Equation
γt = κ2U1 − κ1U2= κB (VFE)
for γ = Γ |λ=0.
The Hasimoto map
H(γ) = q := 12κei∫sτds (Hasimoto, 1972)
maps a solution of the VFE to a solution of the focusing NLS equation.
9 / 34
-
Moving frames and integrability Integrable hierarchies
Integrable hierarchiesVFE
J = T×
K = J ddsJ
R = T × dds
{f , g}MW =∮
S1∇f · J∇g
Wn = RnW0, W0 = T
NLS
J̃φ = iφ
K̃qφ = φs +14
q(∫ s
0+
∫ s2π
)[φq̄ − φ̄q]
R̃ = K̃qJ̃ −1
{F,G}n = 〈R̃nJ̃ F,G〉
Xn = R̃nX0, X0 = qx
Given W = αT + β1U1 + β2U2 and arc length-preserving vector field, setβ = β1 + iβ2. Then
Theorem (Langer & Perline)
dH[W] = R̃4J̃β =⇒ {F,G}4(H(γ)) = {F ◦ H,G ◦ H}MW(γ)10 / 34
-
What about the KdV equation?
What about the KdV equation?
11 / 34
-
What about the KdV equation?
Planar star-shaped curves
A smooth curve γ : I ⊂ R→ R2 is star-shaped if|γ(x) , γ ′(x)| 6= 0 ∀x ∈ I, (?)
where |· , ·| denotes the determinant. Condition (?) is invariant under the linearaction of SL(2,R).
Introduce centroaffine arc length s =∫|γ , γ ′| dx, with v = |γ , γ ′| the
centroaffine speed.
If γ is arc length parametrized, then |γ , γs| = 1. Differentiating this relationwith respect to s gives |γ, γss| = 0 =⇒
γss = −pγ, p := |γs , γss| (centroaffine curvature).
• centroaffine speed and curvature generate differential invariants ofparametrized planar curves under the linear action of SL(2,R).
12 / 34
-
What about the KdV equation? Pinkall’s flow
Pinkall’s flowThe space of closed, unparametrized star-shaped curves in R2
M = {γ : S1 → R2, |γ , γs| = 1}/{s→ s + c}has a natural symplectic structure [Pinkall, 1995]
ω(X,Y) =∮|X ,Y | ds,
with X,Y ∈ TγM arc length preserving vector fields of the formW = −12βsγ+ βγs, β ∈ C
∞(S1).the symplectic form establishes a 1-1 correspondence
dh(X) = ω(X,Xh), ∀X ∈ TγM,between Hamiltonians h and Hamiltonian vector fields Xh.
Taking h[γ] =∮
p(s) ds (twice the area swept by γ ′), we get
γt = −12 psγ+ pγs, Pinkall
′s Flowand the associated evolution for the centroaffine curvature p:
pt = −12 psss + 3pps. (KdV)
13 / 34
-
What about the KdV equation? Curves in RP1 and moving frames
Curves in RP1 and moving framesG = PSL(2,R) acts on RP1 via linear fractional transformations(
a bc d
)· u = au + b
cu + d,
(u an affine coordinate on RP1.)A curve in RP1 is a regular map φ : I → RP1. (Take u(x) as the value of φ inthe affine coordinate, assuming u ′(x) > 0.)
• A moving frame is a smooth equivariant lift ρ : I → G of the curve into thegroup, determined by the action of G on the jet space of φ.
• A normalization process determines the moving frame, as well as agenerating set of differential invariants (curvatures) of the curve. [Fels &Olver]
Example: normalization conditions for a right-moving frame g(x) (equivariant under the rightaction of G on itself):
(g · u)(x) = 0, (g · u) ′(x) = 1, (g · u) ′′(x) = 2λ, ∀x ∈ I.14 / 34
-
What about the KdV equation? Curves in RP1 and moving frames
A λ-normalized left moving frame3 is shown below in factored form:
ρ(x) =(
1 u(x)0 1
)(u ′(x)1/2 0
0 u ′(x)−1/2
) 1 0λ−
u ′′(x)2u ′(x)
1
.• The entries of the Maurer-Cartan matrix ρ−1ρ ′ contain an independent,generating set of differential invariants for the curve. [Hubert]
• Compute:
ρ−1ρ ′ =
(λ 1
κ− λ2 −λ
),
where κ = −12S(u) is the projective curvature of φ, and
S(f ) = f′′′
f ′−
32
(f ′′
f ′
)2is the Schwarzian derivative.
3equivariant under the left action of G on itself15 / 34
-
What about the KdV equation? Curves in RP1 and moving frames
Invariant evolutions of curves in RP1In affine coordinates, the most general SL(2,R)-invariant flow takes the form
ut = ru ′, (1)
with r a function of κ = −12S(u) and its derivatives. [Sokolov]
• If φ evolves by (1), then its λ-normalized projective frame satisfies
ρ−1ρt =
(λr + 12 r
′ r− 12 r
′′ − λr ′ + (κ− λ2)r −λr − 12 r′
),
and its projective curvature satisfies
κt = −12 r′′′ + 2κr ′ + rκ ′,
which for r = κ reduces to the KdV equation
κt = −12κ′′′ + 3κκ ′.
Well-known fact: the Schwarzian KdV equation ut = −12S(u)u′ induces a
KdV evolution for 12S(u). [Krichever, Novikov]16 / 34
-
What about the KdV equation? Curves in RP1 and moving frames
From centroaffine to projectiveThe projectivization map π : R2 → RP1 takes a star-shaped curveγ = (γ1, γ2) to a regular map φ : I → RP1 (since |γ, γ ′| 6= 0).• If γ1 6= 0, then π(γ) in an affine chart is given by u =
γ2
γ1.
• Projectivization π takes centroaffine invariant evolutions to projectiveinvariant evolutions:The most general invariant flow for arclength parametrized curves is
γt = −12
rsγ+ rγs, (2)
r a differential invariant. If γ evolves by (2), then u = γ2/γ1 satisfies
ut = ru ′.
The centroaffine curvature of an arclength parametrized curve satisfiesp(x) = −12S(u), thus:
• Pinkall’s flow (r = p) is simply the Schwarzian KdV equation inhomogeneous coordinates.
17 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
Geometric Hamiltonian structures: frameworkLet g ≡ g∗ = sl(2,R); the following are compatible Poisson structures on theloop algebra Lg∗:
{H,G}1(L) =∫
S1tr(((
δHδL
)x+
[L,δHδL
])δGδL
)dx,
{H,G}0(L) =∫
S1tr([(
0 01 0
),δHδL
]δGδL
)dx,
(3)
[Drinfeld, Sokolov]where G,H are functionals on Lg∗, and δG/δL, δH/δL (∈ Lg) are theirgradients at the point L ∈ Lg∗.
Key Observation. (Ivey, Marı́-Beffa, C) These Poisson structures can bereduced on suitable quotient spacesM/LN (M⊂ Lg∗, N subgroup ofSL(2,R)) to give bi-Hamiltonian structures on: 1. the space of differentialinvariants of projective curves, and 2. the space of differential invariants ofcurves parametrized by centroaffine arc length.
18 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
Geometric Hamiltonian structures: projective caseThe space of periodic Maurer-Cartan matrices ρ−1ρ ′ with λ = 0 can beidentified with the quotient
M/LN ={(
α 1β −α
)}/ {(1 0∗ 1
)},
where LN ={(
1 0∗ 1
)}acts on Lsl(2)∗ via the gauge action
g · L = g−1g ′ + g−1Lg, g ∈ LN,L ∈ Lsl(2)∗.
The Poisson brackets (3) can be reduced toM/LN to produce the second andfirst Hamiltonian structure for KdV: [Marı́-Beffa]
{h, f }1(κ) =∫
S1
δfδκ
(−
12
D3 − κD − Dκ)δhδκ
dx,
{h, f }0(κ) = 2∫
S1
δfδκ
Dδhδκ
dx, D = d/dx,
with h(κ), f (κ) functionals on the space of periodic curvatures of projectivecurves.
19 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
Geometric Hamiltonian structures: centroaffine case
Compute the normalized left moving frame for a star-shaped curve γ:
ρ =(γ 1vγ
′) , v = |γ, γ ′|.Results:
• The space of Maurer-Cartan matrices ρ−1ρ ′ =(
0 −vpv 0
)can be identified
with the quotient
Lsl∗(2)/ {(
1 ∗0 1
)},
where LN ={(
1 ∗0 1
)}acts on Lsl(2)∗ via the gauge action
g · L = g−1g ′ + g−1Lg, g ∈ LN, L ∈ Lsl(2)∗.
20 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
• The Poisson brackets (3) can be reduced to{(
0 ab 0
)}⊂ Lsl(2)∗:
{h, f }1(a, b) =∫
S1
(δfδa,δfδb
)(− 12 D
1b D
1b D +
1b aD + D
1b a 0
0 0
)δhδaδhδb
dx,
{h, f }0(a, b) =∫
S1
(δfδa,δfδb
)(2b D 00 0
)δhδaδhδb
dx.Further restriction to the subspace with b = 1 (arc length parametrizedcurves) gives the second and first Poisson operators for the KdV equation(where a = p = −k, the centroaffine curvature).
Consequence: The projectivization map π : R2 → RP1 induces a localbi-Poisson map between the space of periodic Maurer-Cartan matrices forcentroaffine curves parametrized by centroaffine arc-length, and the space ofMaurer-Cartan matrices for parametrized projective curves.
21 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
HierarchiesDefine the map
K(γ) := p = |γs, γss|
(analogue of the Hasimoto map for Euclidean curves) and let Y = −12βsγ+ βγs be an arclength preserving vector field.
Lemma:dK(Y) = Pβ,
where P is the second Poisson operator of the KdV hierarchy.
Let f =∫ρ ds be an invariant functional on M (ρ must be a function of p and its
derivatives). Define
Xf = −12(Eρ)sγ+ (Eρ)γs, where Ef =∑j≥0
(−D)j∂ρ
∂p(j).
If hk =∮ρkds is the k-th KdV Hamiltonian, and Xhk is the Hamiltonian vector field defined
bydhk(Y) = ω(Y,Xhk),
Then,Xhk = X
ρk+1 , Eρk+1 = Q−1PEρk.
22 / 34
-
What about the KdV equation? Geometric Hamiltonian structures (KdV)
In summary,
Theorem1 Each flow of the KdV hierarchy is the curvature evolution induced by a
geometric flow for centroaffine curves in R2.2 Defining {Hj,Hk}(γ) := ω(XHj ,XHk), we have:
{Hj,Hk}(γ) = {Hj,Hk+1}0(K(γ)) = {Hj,Hk}1(p),
Thus K is a Poisson map, that maps Pinkall’s area form to the secondPoisson structure for KdV.
23 / 34
-
Discrete setting
Discrete setting
24 / 34
-
Discrete setting Projective twisted polygons and centroaffine lifts
Polygonal evolutionsExampleConsider the Volterra model on twisted polygons, a discretization of theKorteweg deVries (KdV) equation
(qn)t = qn(qn+1 − qn−1)
and assume that qn is the cross ratio of un−1, un, un+1, un+2, where un ∈ RP1for all n. Let {γn} be a lift of the projective polygon to R2 with
|γn, γn+1| = 1, ∀n.
(Possible if N is not even.) Then, qn = (|γn−1, γn+1||γn, γn+2|)−1 and theprojective tangential flow
(γn)t =1
2|γn−1, γn+1|(γn+1 − γn−1)
is a projective realization of the Volterra model .
Note: We assume we have twisted polygons, i.e. un+N = g · un, for g ∈ PSL(2,R),the monodromy and N ∈ N, the period.
25 / 34
-
Discrete setting Projective twisted polygons and centroaffine lifts
General polygonal evolutionsLet {γn}, γn ∈ Rm+1, be the lift of an N-twisted projective polygon {un},un ∈ RPm, such that
`n = |γn, γn+1, . . . , γn+m| = 1, ∀n.(This condition can be satisfied when m and N are coprime.)
The projective invariants are defined by the relation:
γn+m+1 = amn γn+m + · · ·+ a1nγn+1 + (−1)mγn.
Introduce the left moving frame ρ(γ) = {ρn(γ)}:
ρn(γ) = (γn, γn+1, . . . , γn+m).
The discrete equivalent of the Frenet-Serret equations are:
ρn+1 = ρnKn, Kn =(
0T (−1)m−1Im−1 an
){Kn}, the Maurer-Cartan matrix, defines (local) coordinates of the modulispace of polygons.
26 / 34
-
Discrete setting Projective twisted polygons and centroaffine lifts
A projective vector field X = {Xn}, invariant under the projective group, hasthe form
Xn =m∑`=0
r`nγn+` = ρnr, rT = (r0n, . . . , r
mn ),
where r`n are functions of the curvatures akj . The resulting polygon evolution
equation(γn)t = Xn
induces evolution equations for its left-moving frame ρ = {ρn}:
(ρn)t = ρnQn,
The Frenet-Serret equations and the frame evolution equations are compatibleprovided
(Kn)t = KnQn+1 − QnKn.
Arc length preservation during the evolution can be expressed as:
tr(Qn) = 0.
As in the continuous case, compatibility and arc length preservation are key tointegrabiilty.
27 / 34
-
Discrete setting Discretizations of the AGD flows
Discrete generalized KdV flowsThe following ODE system
(γn)t = −m
m + 1γn −
a2n−1a1n−1
γn+1 . . .−amn−1a1n−1
γn+m−1 +1
a1n−1γn+m. (4)
preserves the centroaffine arc length `n, defining a projective evolution.
Theorem (Marı́-Beffa & Wang, 2013)If {γn(t)} is a solution of (4) , then the geometric invariants {an(t)} satisfy thefollowing system of ODEs:
(akn)t =ak+1n+1a1n+1
−ak+1na1n−k
k = 1, 2, . . . ,m − 1
ddt
amn =1
a1n+1−
1a1n−m−1
a discretization of the m-AGD flow: a generalized KdV equation introduced by Lax(’68) and proven integrable by Adler (’79), Gel’fand and Dikii (’87), who found twocompatible Hamiltonian structures (the AGD brackets)
28 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
Theorem (Marı́-Beffa & Wang, ’13)The evolution equation for {an(t)} is Hamiltonian with respect to two Poissonstructures { , }1 and { , }2. For m = 1, 2, the Poisson brackets are compatibleand the evolutions are Liouville integrable.
For m = 2, the Poisson brackets are given by:
{f , h}1(a) =∑
n
(∂f∂a1n
∂f∂a2n
)T (T −1a2n − a2nT T − T −2T 2 − T −1 0
)( ∂h∂a1n∂h∂a2n
),
{f , h}2(a) =∑
n
(∂f∂a1n
∂f∂a2n
)T (a1nR−1(T − T −1)a1n a1nR−1(1 − T −1)a2na2nR−1(1 − T −1)a1n T a1n − a1nT −1 + a2nR−1(T − T −1)a2n
)( ∂h∂a1n∂h∂a2n
),
where T akn := akn+1 andR := T −1 + 1 + T (invertible for N 6= 0 mod 3)For
m ≥ 3, the compatibility question was left open due to unyieldingcomputations.
29 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
Lifting the Poisson structures to projective polygonsOn the space of projective vector fields on twisted polygons, define theoperator L(X) = {Ln(X)} with
Ln(X) = (−1)m((−1)mXn + a1nXn+1 + · · ·+ amn Xn+m − Xn+m+1).
Let θ be the 1-form
θ(X) =N∑
n=1
|Xn, γn+1, . . . , γn+m|
and define the following two formsω1 andω2
ω1(X,Y) = dθ(X,Y)
ω2(X,Y) = X(θ(L(Y))) − Y(θ(L(X)) − θ ((XL(Y) − YL(X))) .
Theorem (Marı́-Beffa, C)Bothω1 andω2 are closed 2-forms on the space of projective vector fields,and have non-trivial kernels (pre-symplectic forms).
30 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
Results (M-B, C)
TheoremGiven function f , g of the invariants arn, there exist vector fields X
f ,Xh
(explicitly constructible) such that:1 ω1(Xf ,Xh)(γ) = {f , h}1(a) and ω2(Xf ,Xh)(γ) = {f , h}2(a).2 Xf is theω2-Hamiltonian vector field of f .3 If γ evolves via
(γn)t = Xfn,
then the evolution of the an’s is Hamiltonian w.r.t. { , }2 withHamiltonian f .
4 The map df → Xf is the de-facto inverse ofω2 on symplectic leaves.31 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
The discrete AGD-flows are bi-Hamiltonian
CorollaryThe Hamiltonian structures { , }1 and { , }2 are compatible. It follows that thediscretizations of generalized KdV are bi-Hamiltonian and completelyintegrable.
Proof.∑
{h, {f , g}1 + {f , g}2}1 + {h, {f , g}1 + {f , g}2}2
=∑
{h, {f , g}2}1 + {h, {f , g}1}2
=∑
ω1(Xh, [Xf ,Xg]) + Xh(ω1(Xf ,Xg)) =∑
dω1(Xh,Xf ,Xg) = 0.
32 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
Further properties ofω1 andω2 (Marı́-Beffa, C)
1 The kernel ofω1 is generated by two vector fields X1 and X2
X1n = γn+1 + αnγn, X2n = γn+2 + (αn + αn+1)γn+1 + βnγn,
with Hamiltonians with respect toω2 given by h1 = 1m+1θ(X1) and
h2 = m+12 θ(X2), respectively.
2 The kernel ofω2 is generated by the vector fields
(γn)t = Aγn
where A ∈ sl(m + 1) is an element of the isotropy algebra of themonodromy of γ. These vector fields are Hamiltonian with respect toω1, with Hamiltonian hA = θ(Aγ).
3 ω2(X1,X2) = 0.
In progress: Construction of integrable hierarchies.
33 / 34
-
Discrete setting Bi-hamiltonian structure and pre-symplectic forms
Thank you!
34 / 34
Take-home pointsMoving frames and integrabilityMotivation: curves in Euclidean spaceExample: the Vortex Filament Equation (VFE)Integrable hierarchies
What about the KdV equation?Pinkall's flow Curves in RP1 and moving framesGeometric Hamiltonian structures (KdV)
Discrete settingProjective twisted polygons and centroaffine liftsDiscretizations of the AGD flowsBi-hamiltonian structure and pre-symplectic forms