Angular Momentum - Physics F111 BITS Pilani
66
Dr. G. Amaranath, BITS Pilani, Dubai Campus ANGULAR MOMENTUM AND FIXED AXIS ROTATION Contents: 1. Angular Momentum 2. Torque 3. Moment of Inertia 4. Parallel Axes Theorem 5. The Dynamics of Pure Rotation 6. Rolling Motion 7. Problems Chapter : 6
-
Upload
harsh-hirani -
Category
Documents
-
view
237 -
download
1
Transcript of Angular Momentum - Physics F111 BITS Pilani

Dr. G. Amaranath, BITS Pilani, Dubai Campus
ANGULAR MOMENTUM AND
FIXED AXIS ROTATION
Contents:1. Angular Momentum2. Torque3. Moment of Inertia4. Parallel Axes Theorem5. The Dynamics of Pure Rotation6. Rolling Motion7. Problems
Chapter : 6
Dr. G. Amaranath, BITS Pilani, Dubai Campus
In first 4 chapters, the concepts (force, linear momentum and centre of mass) to handle the translatory motion of have been developed.
In this chapter, the techniques / concepts to handle the rotational motion of solid bodies will be developed. They are
(1)Torque ()(2)Angular momentum (L)(3)Moment of inertia (I)
Introduction

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Motion / displacement of a rigid body – translation of the centre of mass and rotation of the body about centre of mass (one possible way and it is not the only way)
Introduction

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Angular momentum (L) :
of a particle:Definition: L = r X P, where L is the angular momentum of a particle which has a momentum P and position vector rwith respect to a given coordinate system.Unit: kgm2 s-1 No special names for these units.Magnitude - rpsin Direction - perpendicular to the plane containing both r & P - dictated by the right hand rule.

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Angular momentum
If r and P lie on XY plane, then L is in the Z – direction.If the rotation is anticlockwise then L is said to be +veIf the rotation is clockwise then L is said to be -ve

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Angular momentum (L):
Method: 1
Lz = r P = r P

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Method:2

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Method:3
Lz=(xPy-yPx)k = 00
yx ppyx
kji
Angular momentum
Dr. G. Amaranath, BITS Pilani, Dubai Campus
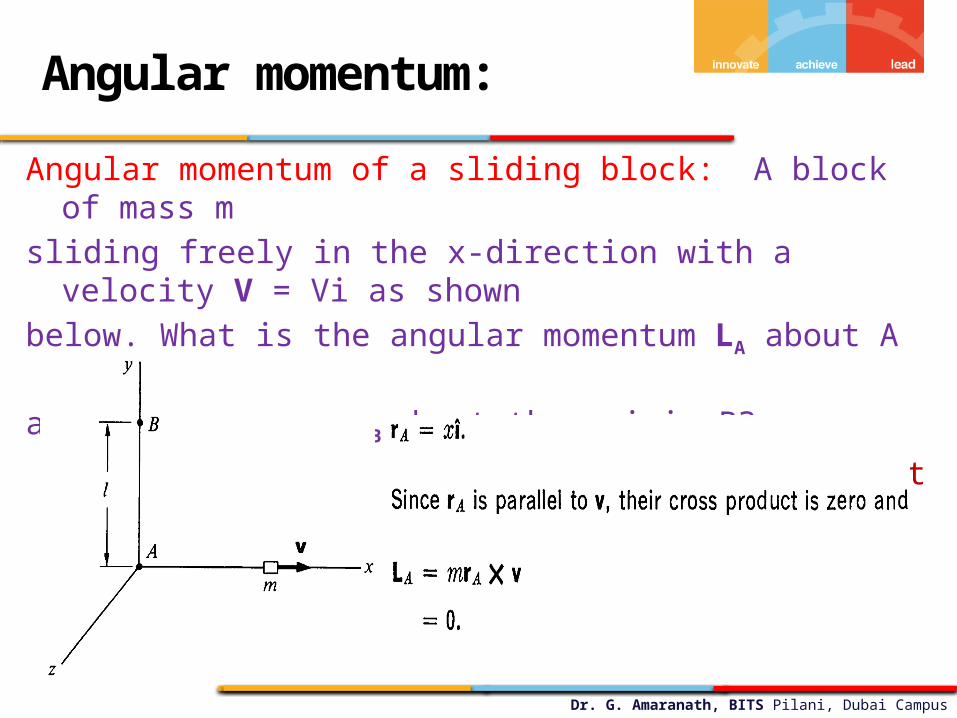
Angular momentum of a sliding block: A block of mass m sliding freely in the x-direction with a velocity V = Vi as shown below. What is the angular momentum LA about A and its angular momentum LB about the origin B? About the origin A:
Angular momentum:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
About origin B:
rB = xi – lj
LB = mrB X V
LB =
LB = mlv k
L depends on the choice of the origin.
Angular momentum
000
vlxkji

Dr. G. Amaranath, BITS Pilani, Dubai Campus
About the point A : the conical pendulum is in steady circular motion with constant angular velocity . P = MV = Mr (V = r) LA = r X P = r Mr k = M r2 k
The direction of L is along the Z axis.
L is constant both in magnitude and direction in this case.
Angular momentum of the conical Pendulum:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
About the point B: LB = r’ X P = r’ P = l Mr Here L is constant in magnitude but not in direction.
Angular momentum of the conical Pendulum:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
One more example:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
The torque () due to force F which acts on a particle at position r is defined by
= r X F =
= r F = r F
The direction of torque will be perpendicular to both r and F.Given by the Right Hand Rule. Torque depends on the origin we choose, whereas force not. Both are always perpendicular to each other.
Torque ():
zyx FFFzyxkji

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
There can be a torque on a system with zero net force and there can be force with zero net torque as shown below.
Torque is the rate of change of angular momentum.
Toque:
dtdLτ
dtdLτ
Dr. G. Amaranath, BITS Pilani, Dubai Campus
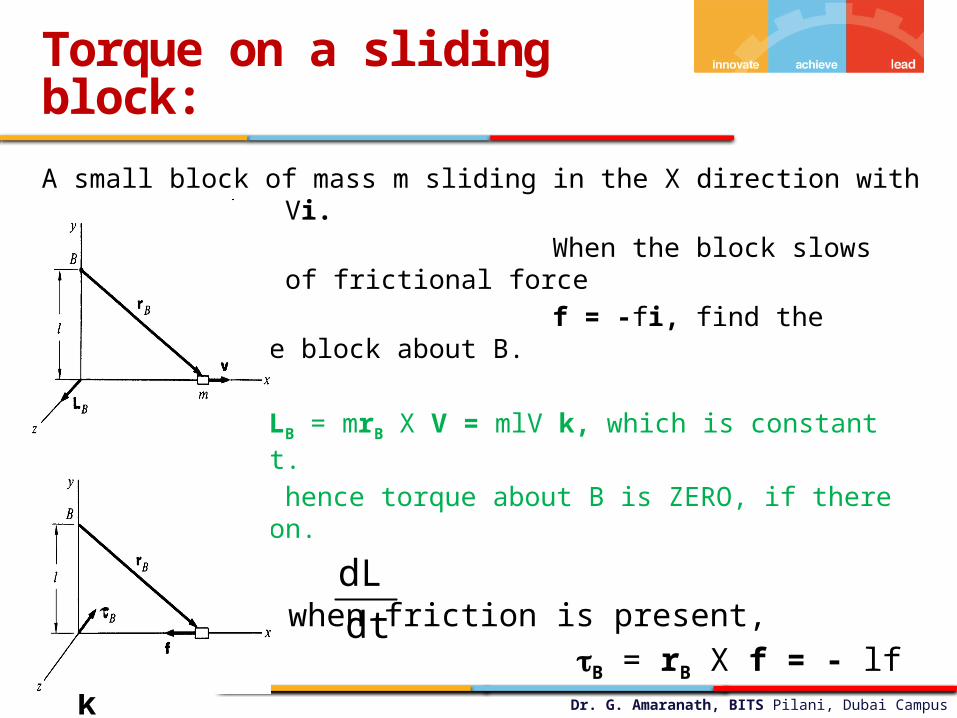
A small block of mass m sliding in the X direction with velocity V = Vi. When the block slows down because of frictional force f = -fi, find the torque on the block about B.
LB = mrB X V = mlV k, which is constant if v is const.
hence torque about B is ZERO, if there is no friction.
when friction is present, B = rB X f = - lf k
= can also be used
Torque on a sliding block:
dtdL
Dr. G. Amaranath, BITS Pilani, Dubai Campus
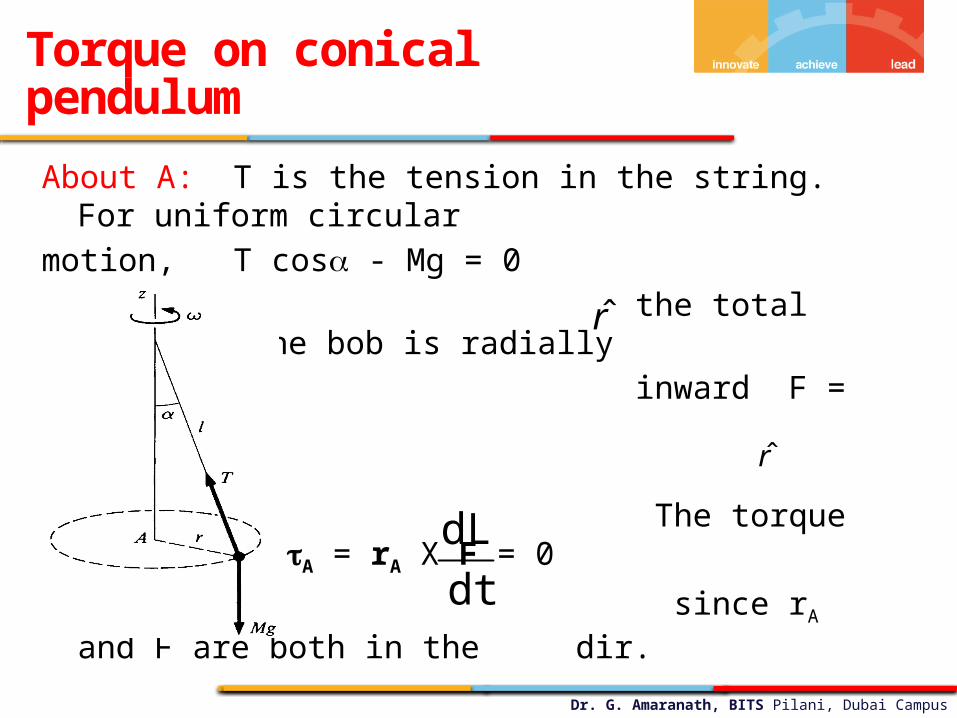
Torque on conical pendulum
About A: T is the tension in the string. For uniform circularmotion, T cos - Mg = 0 the total force on the bob is radially inward F = -T sin
The torque about A is A = rA X F = 0 since rA and F are both in the dir.
hence = 0 and so LA = constant.
r̂
r̂
dtdL

Dr. G. Amaranath, BITS Pilani, Dubai Campus
About B: B = rB X F B = l cos F = l cos T sin
= Mgl sin (since,T cos = Mg) The direction of B is tangential to the line of motion of M. B = Mgl sin where is the unit tangential vector in the plane of motion. B B
Torque on conical pendulum:
θ̂
θ̂̂

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
When a body is rotating about Z axis,Where j is the perpendicular distance from the axis of rotation to the particle mj of the rigid body and is the angular velocity.
The angular momentum of the j particle is L = r X mV L=mVxdistance to Z axis = mV L = m() = (m2)
Moment of Inertia (I)
jjj ωρrV

Dr. G. Amaranath, BITS Pilani, Dubai Campus
The total angular momentum of the body is LZ = (m2) = Iwhere I = (m2) and I is called MOMENT OF INERTIAI depends on the distribution of mass in the body and the location of the axis of rotation.
For a continuously distributed matter,I= = perpendicular distance from the axis of rotation. dm = density X d(volume)
A body can have infinite moments of inertia!!!
Moment of inertia
)dmy(xdmρ 222

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Uniform thin hoop: mass – M; radius – RAxis: Through the centre & perpendicular to the plane of hoop. As the hoop is thin, dm = ds where = M / 2R and = R
MI of some simple objects:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
mass – M; radius – RAxis : Through the centre & perpendicular to the plane of disk. Divide the disk in series of thin hoops with
radius , width d and MI, dI. dA = 2 d and its mass is
MI of Uniform disk
Dr. G. Amaranath, BITS Pilani, Dubai Campus
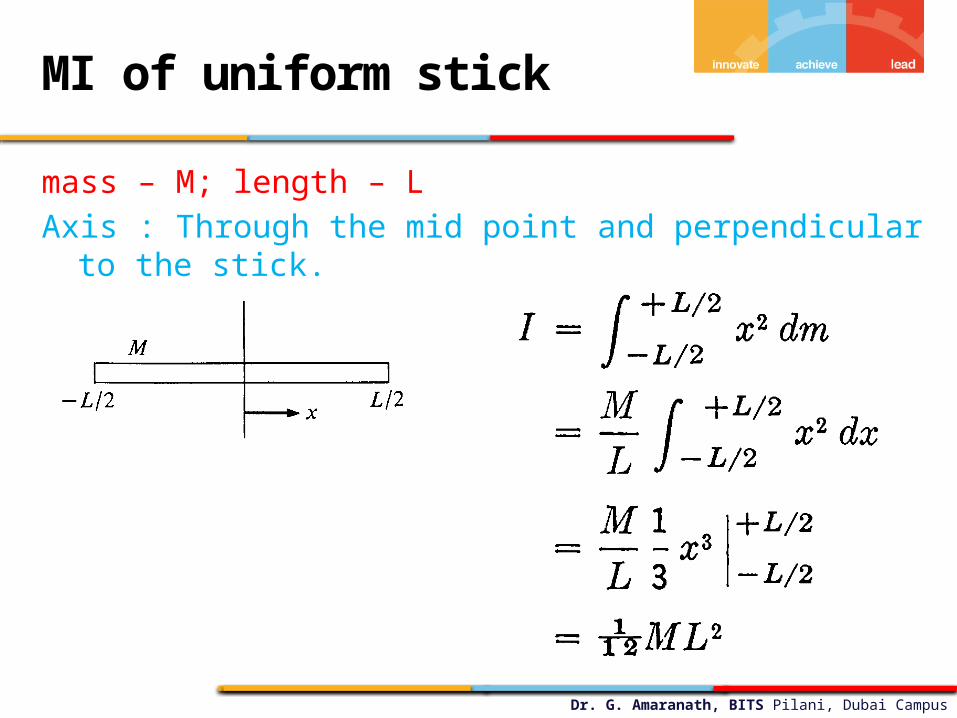
mass – M; length – LAxis : Through the mid point and perpendicular to the stick.
MI of uniform stick

Dr. G. Amaranath, BITS Pilani, Dubai Campus
mass – M; length – LAxis : Through one end and perpendicular to the stick.
MI of uniform stick:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
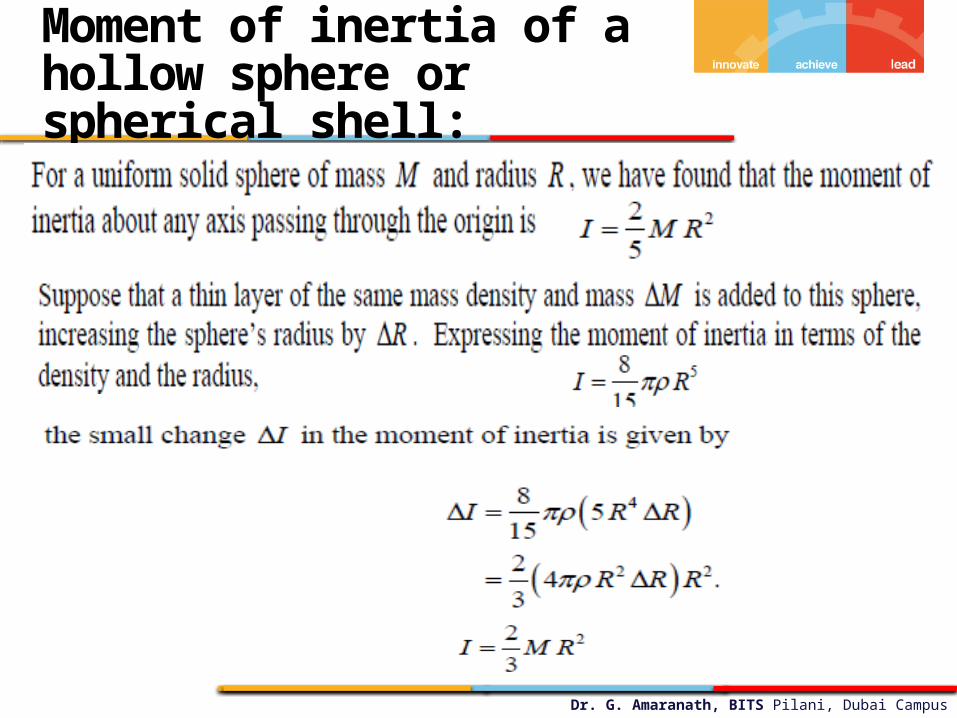
MI of uniform sphere

Dr. G. Amaranath, BITS Pilani, Dubai Campus
1. Slice up the solid sphere into infinitesimally thin solid cylinders.2. Sum from the left to the right.We know that the moment of inertia for a solid cylinder is

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Moment of inertia for a hoop: I = r2 dmHence,Finding dm, Now, dA is the area of the ring Note: 2πr is the circumference of the hoop while R dθ is the “thickness” of the hoop (its dx in the above picture). The R dθ comes from the equation for arc length: S = Rθ.There is a right-angle triangle with angle θ at the centre of the circle.hence, substituting the equation for dA and the equation above into theequation for dm, we have: Substituting the equation above and the equation for r into the equationfor dI, we have:
Moment of inertia of a thin spherical shell:
Dr. G. Amaranath, BITS Pilani, Dubai Campus
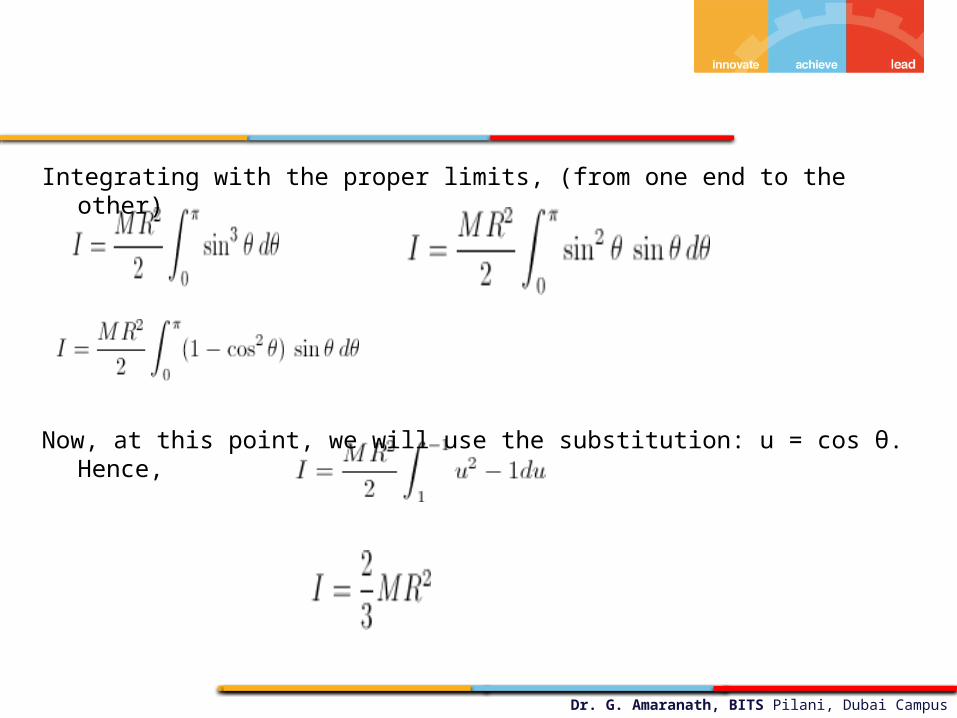
Integrating with the proper limits, (from one end to the other)
Now, at this point, we will use the substitution: u = cos θ. Hence,
Dr. G. Amaranath, BITS Pilani, Dubai Campus
Moment of inertia of a hollow sphere or spherical shell:
Dr. G. Amaranath, BITS Pilani, Dubai Campus
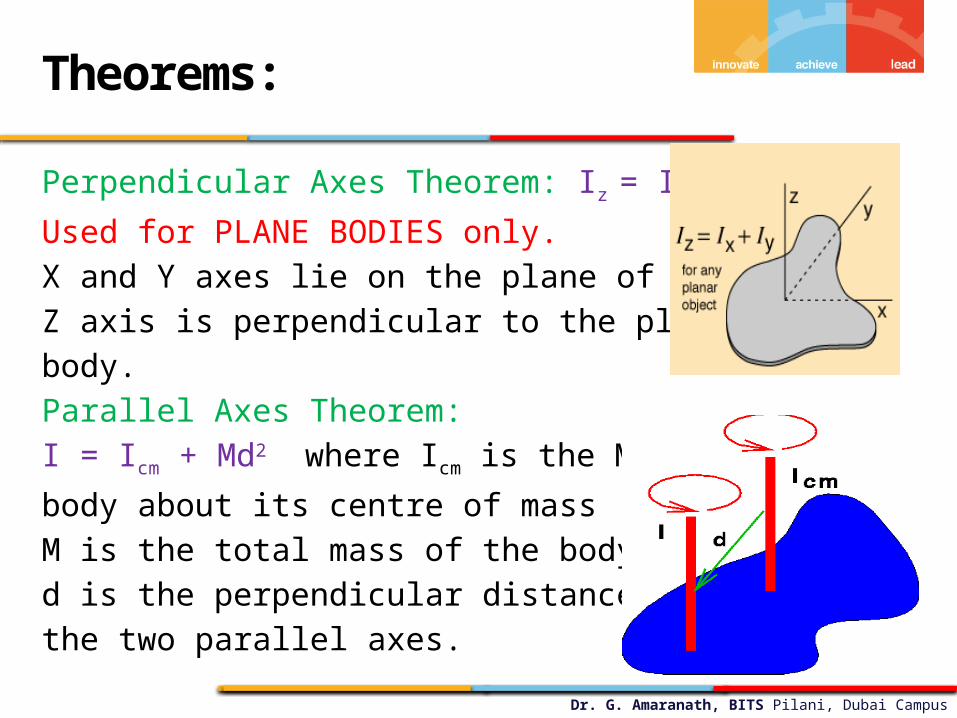
Perpendicular Axes Theorem: Iz = Ix + Iy
Used for PLANE BODIES only.X and Y axes lie on the plane of the bodyZ axis is perpendicular to the plane of the body.Parallel Axes Theorem:I = Icm + Md2 where Icm is the MI of thebody about its centre of massM is the total mass of the bodyd is the perpendicular distance betweenthe two parallel axes.
Theorems:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Applications of Theorems:
MI of cylinder: MI of thin disc: MI of thin rod:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
MI of common regular shaped objects:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Find the acceleration a for the arrangement shown below.
Atwood’s machine with a massive pulley:

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Rolling motion:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
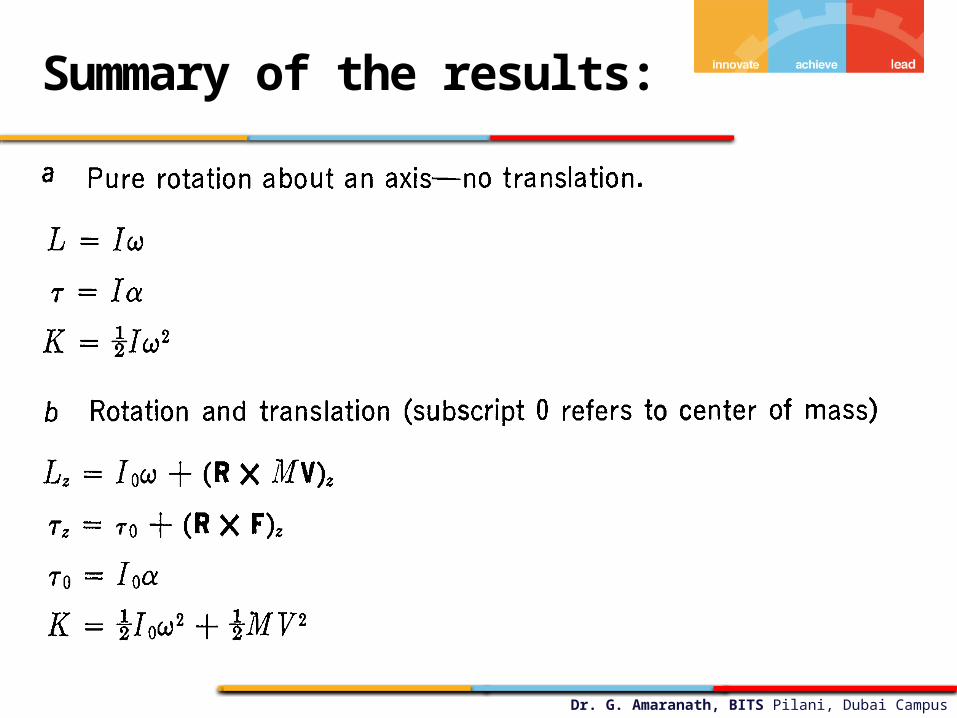
1. Angular Momentum:First term is due to the rotation of the body about its centre of mass (SPIN) and the second term, due to motion of centre of mass w.r.to the origin (ORBITAL).
Daily rotation of earth-SPIN Annual rotation about Sun- ORBITAL Angular
momentum
Dr. G. Amaranath, BITS Pilani, Dubai Campus
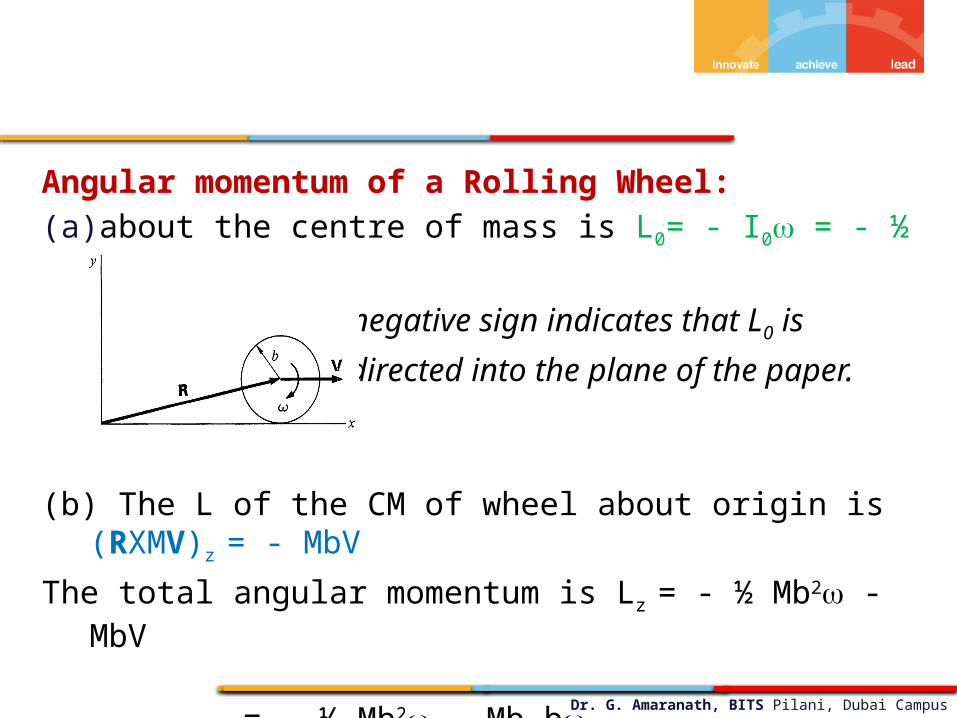
Angular momentum of a Rolling Wheel:(a) about the centre of mass is L0= - I0 = - ½ Mb2, the n negative sign indicates that L0 is directed into the plane of the paper.
(b) The L of the CM of wheel about origin is (RXMV)z = - MbVThe total angular momentum is Lz = - ½ Mb2 - MbV = - ½ Mb2 - Mb.b Lz= - 1.5 Mb2

Dr. G. Amaranath, BITS Pilani, Dubai Campus
2. Torque:
The first term is the torque about the CM due to variousexternal forces, and the second term is the torque due tothe total external force acting at the centre of mass.

Dr. G. Amaranath, BITS Pilani, Dubai Campus
According to this eqn, rotational motion about CM depends onthe torque about the CM, independent of translational motion.
Dr. G. Amaranath, BITS Pilani, Dubai Campus
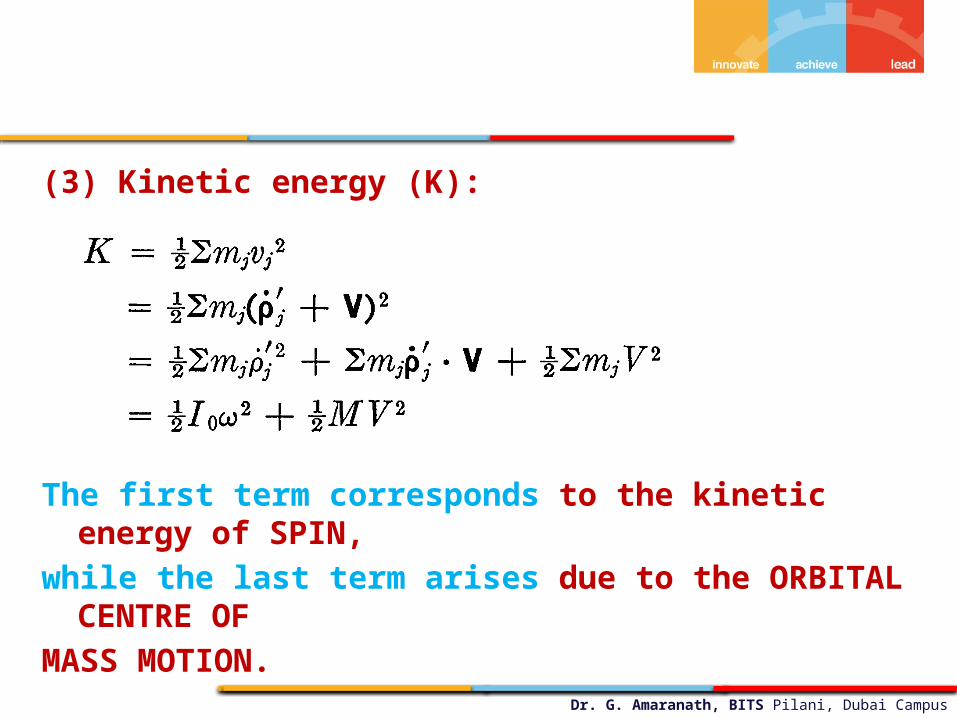
(3) Kinetic energy (K):
The first term corresponds to the kinetic energy of SPIN, while the last term arises due to the ORBITAL CENTRE
OFMASS MOTION.
Dr. G. Amaranath, BITS Pilani, Dubai Campus
AA
Summary of the results:

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Disk on Ice: A disk of mass M and radius b is pulled with constant force F by a thin tape wound around its circumference. The disk slides on ice without friction. Find the acceleration of the CM. The torque about the CM of the
disk 0 = bF = I0
Acceleration a =
Example 6.15 page:264
0IbFα
MF
Dr. G. Amaranath, BITS Pilani, Dubai Campus
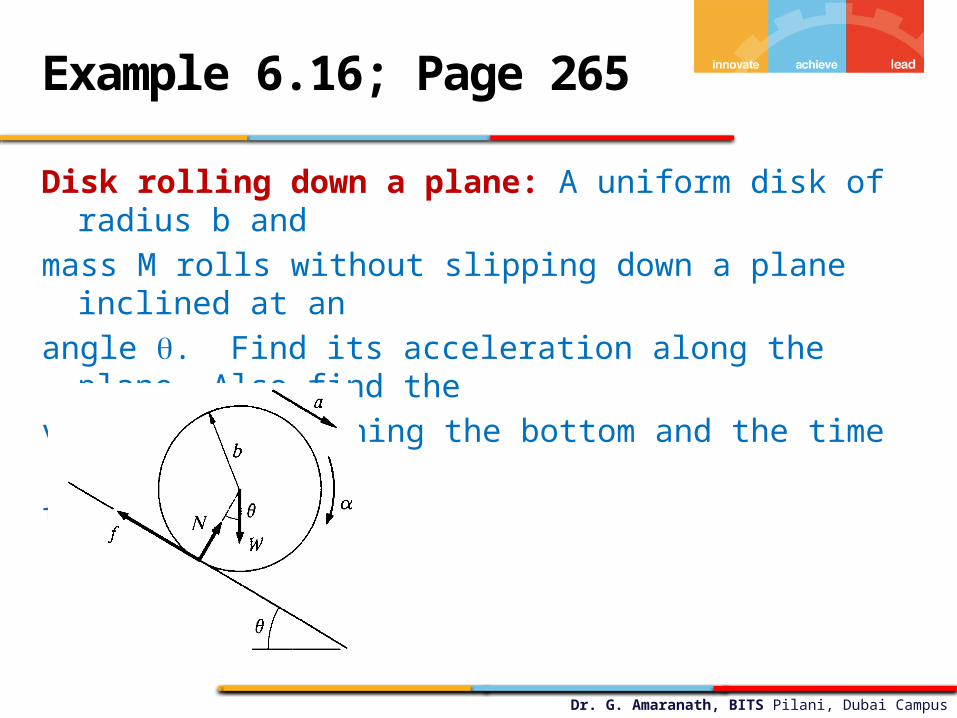
Disk rolling down a plane: A uniform disk of radius b and mass M rolls without slipping down a plane inclined at an angle . Find its acceleration along the plane. Also find the velocity on reaching the bottom and the time taken to reachthe bottom.
Example 6.16; Page 265
Dr. G. Amaranath, BITS Pilani, Dubai Campus
The translation of the CM along the plane is given by W sin - f = Ma ----------------------(1)
where f is the frictional force.The rotation of the CM is given by = bf = I0 ---------(2)For the rolling without slipping, we have, a = b -----(3)using the value of f from (2) in (1) we get,W sin - I0 (a/b) = MaUsing I0 = ½ Mb2 and = (a/b) in the aboveWe get a = (2/3) g sin

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Velocity : ( energy method is used) using the W-E theorem,
Where l = h/sin is the displacement of the CM.The energy equation for rotational motion is or f b = ½ I0 2

Dr. G. Amaranath, BITS Pilani, Dubai Campus
For rolling motion without slipping, b = l hence,
Eliminating f we get,

Dr. G. Amaranath, BITS Pilani, Dubai Campus
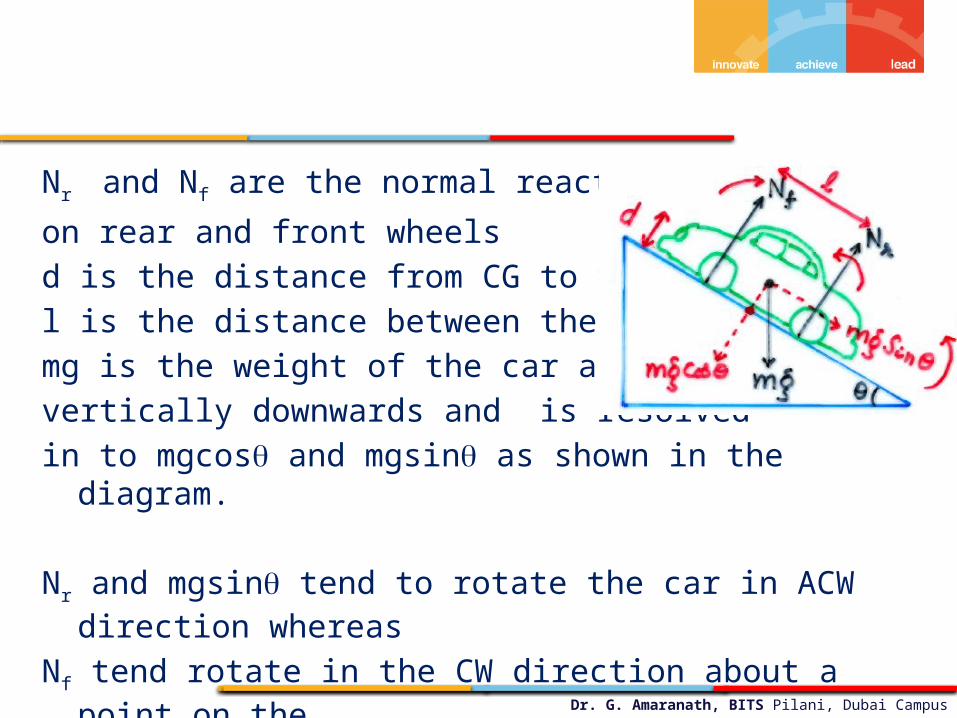
A 3000 lb car is parked on a 300 slope, facing uphill. The centre of mass of the car is halfway between the front and rear wheels and is 2ft above the ground. The wheels are 8 ft apart. Find the normal force exerted by the road on the front and on the rear wheels.Given,M = 3000 lb = 300
l = 8 ft d = 2 ftNf = ? and Nr = ?
Problem 6.5 page 279
Dr. G. Amaranath, BITS Pilani, Dubai Campus
Nr and Nf are the normal reactions on rear and front wheelsd is the distance from CG to the groundl is the distance between the two tyresmg is the weight of the car acting vertically downwards and is resolved in to mgcos and mgsin as shown in the diagram.
Nr and mgsin tend to rotate the car in ACW direction whereasNf tend rotate in the CW direction about a point on theground(2ft below the CM)
Dr. G. Amaranath, BITS Pilani, Dubai Campus
As there is no rotation of the car, the net torque = 0
As the car is neither moving in upward no in the downward direction, the net force should be zero.
Nr + Nf = mg cos ---------------(2) solving (1) and (2) for Nr and Nf we get
r f
r f
N + mgdsinθ = N2 2
-2mgdsinθN - N = (1)
r fcosθ dsinθ cosθ dsinθN = mg - and N = mg +
2 2

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
For vertical equilibrium of the cylinder,
0 0 0 02 2 1 1
2 1
sin 45 sin 45 sin 45 sin 45
2 (1 ) (1 ) (1)
mg N N N N
mg N N
Dr. G. Amaranath, BITS Pilani, Dubai Campus
For horizontal equilibrium of the cylinder,
Solving for N1 and N2 we get,
Torque is = ( f1 + f2) R = R (N1 + N2)
0 0 0 01 2 1 2
2 1
cos 45 cos 45 cos 45 cos 450 (1 ) (1 ) (2)N N N N
N N
1 22 2
mg(1+μ) mg(1-μ)N = and N =2(1+μ ) 2(1+μ )
2
mgR 2τ = = 5.7m(1+μ )

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
We know that
Length of the tape is
2 2 2Fr t Fr tL = Vdt = rωdt = dt = I 2I
τ rFtt = I I
t
22
22
2LIt = Fr
substituting t in equation, and simplifying, we get,2FLI = 400 kgmω

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
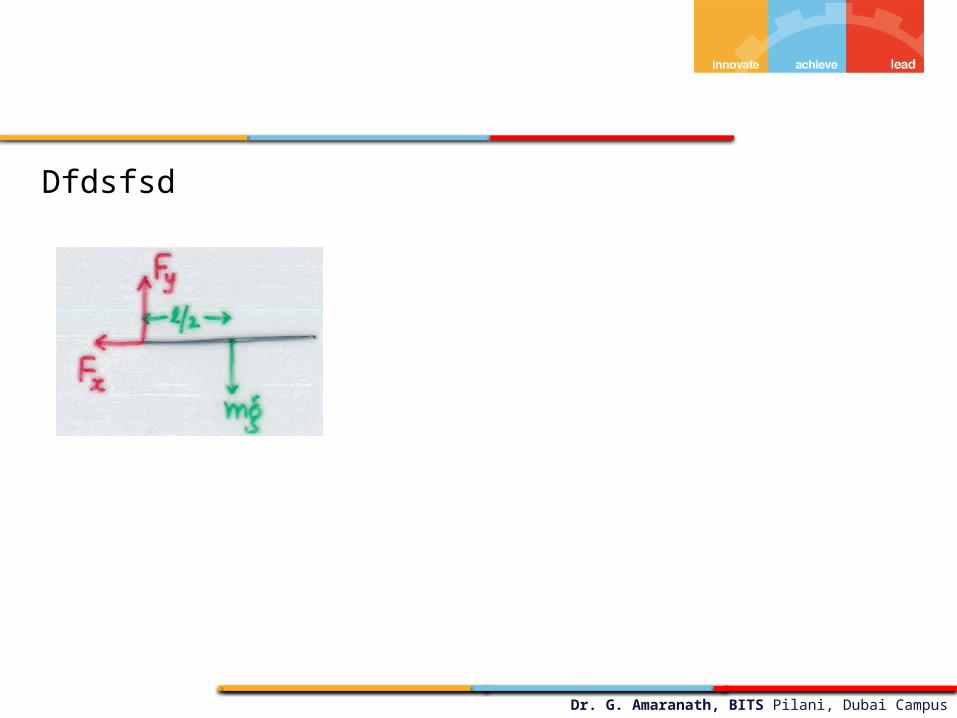
(a) When the stick is released, there are TWO forces acting on it, gravity at the midpoint and the normal force at point B. Using B as origin, , clockwise.
(b)
mgτ = 2
2
2
mτ = I = 3
m 32 3 2
B
mg g
Dr. G. Amaranath, BITS Pilani, Dubai Campus
(c)
(d) Vertical force at B =
3g 3ga = rα = . = 2 2 4
3mg mgmg - 4 4

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Afsdfsd

Dr. G. Amaranath, BITS Pilani, Dubai Campus
Dr. G. Amaranath, BITS Pilani, Dubai Campus
Dfdsfsd

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus

Dr. G. Amaranath, BITS Pilani, Dubai Campus