Andrei Sharf Dan A. Alcantara Thomas Lewiner Chen Greif Alla Sheffer Nina Amenta Daniel Cohen-Or...
28
-
date post
20-Dec-2015 -
Category
Documents
-
view
215 -
download
0
Transcript of Andrei Sharf Dan A. Alcantara Thomas Lewiner Chen Greif Alla Sheffer Nina Amenta Daniel Cohen-Or...

Andrei Sharf Dan A. Alcantara Thomas Lewiner Chen Greif
Alla Sheffer Nina Amenta Daniel Cohen-Or
Space-time Surface Reconstruction using Incompressible Flow
4D Data acquisition - setting
• Synchronized static cameras • 2-16 views • Capture rates 10-30 fps
• Persistent self occlusions• Low frame rate and resolution• Noise
4D Data acquisition - limitations
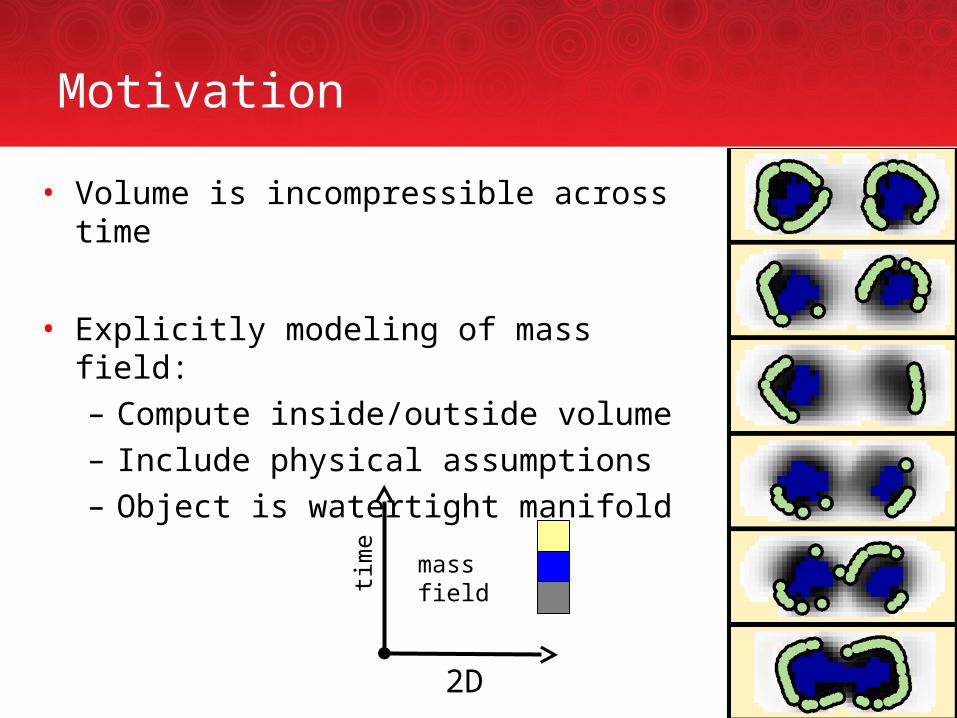
Motivation
• Volume is incompressible across time
• Explicitly modeling of mass field:– Compute inside/outside volume– Include physical assumptions– Object is watertight manifold
2D
time mass field
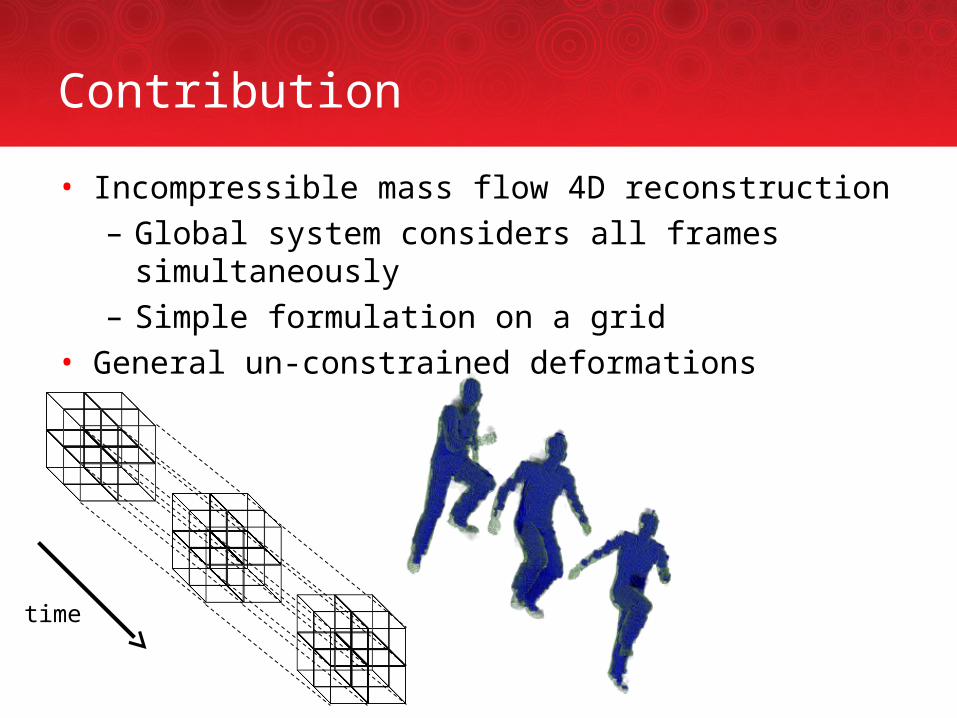
Contribution
• Incompressible mass flow 4D reconstruction– Global system considers all frames simultaneously– Simple formulation on a grid
• General un-constrained deformations
time
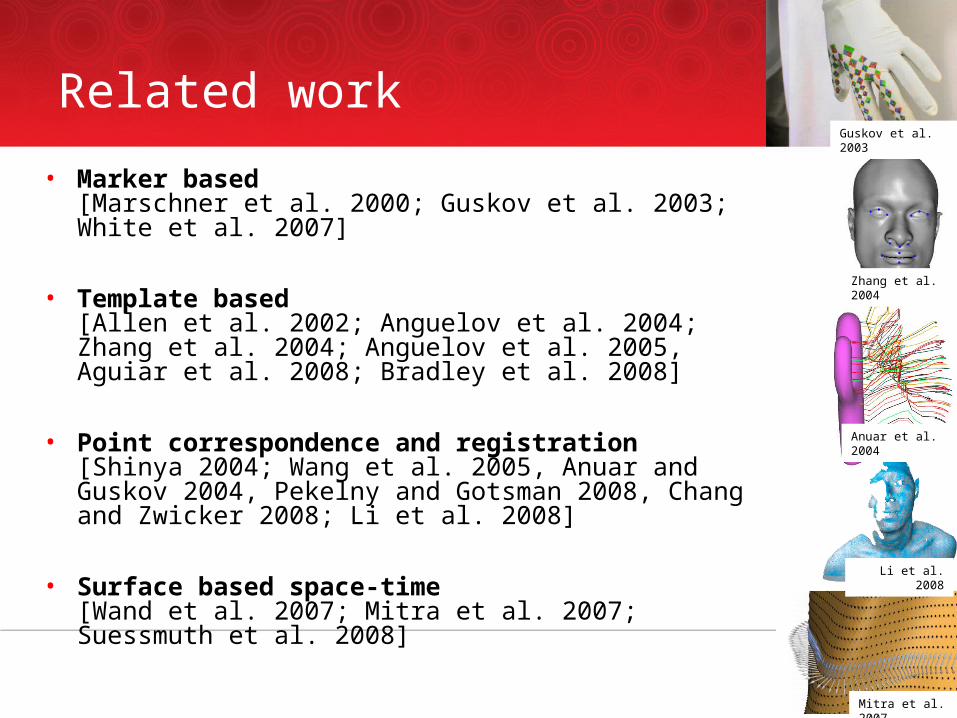
Related work
• Marker based [Marschner et al. 2000; Guskov et al. 2003; White et al. 2007]
• Template based [Allen et al. 2002; Anguelov et al. 2004; Zhang et al. 2004; Anguelov et al. 2005, Aguiar et al. 2008; Bradley et al. 2008]
• Point correspondence and registration[Shinya 2004; Wang et al. 2005, Anuar and Guskov 2004, Pekelny and Gotsman 2008, Chang and Zwicker 2008; Li et al. 2008]
• Surface based space-time [Wand et al. 2007; Mitra et al. 2007; Suessmuth et al. 2008]
Mitra et al. 2007
Li et al. 2008
Anuar et al. 2004
Zhang et al. 2004
Guskov et al. 2003
FLOW reconstruction
• In: 3D point cloud frames• Out: watertight surface• Explicit volume modeling
– 4D solid on a grid– Characteristic function
3D reconstruction techniques fail
• Surface reconstruction of individual frames fails
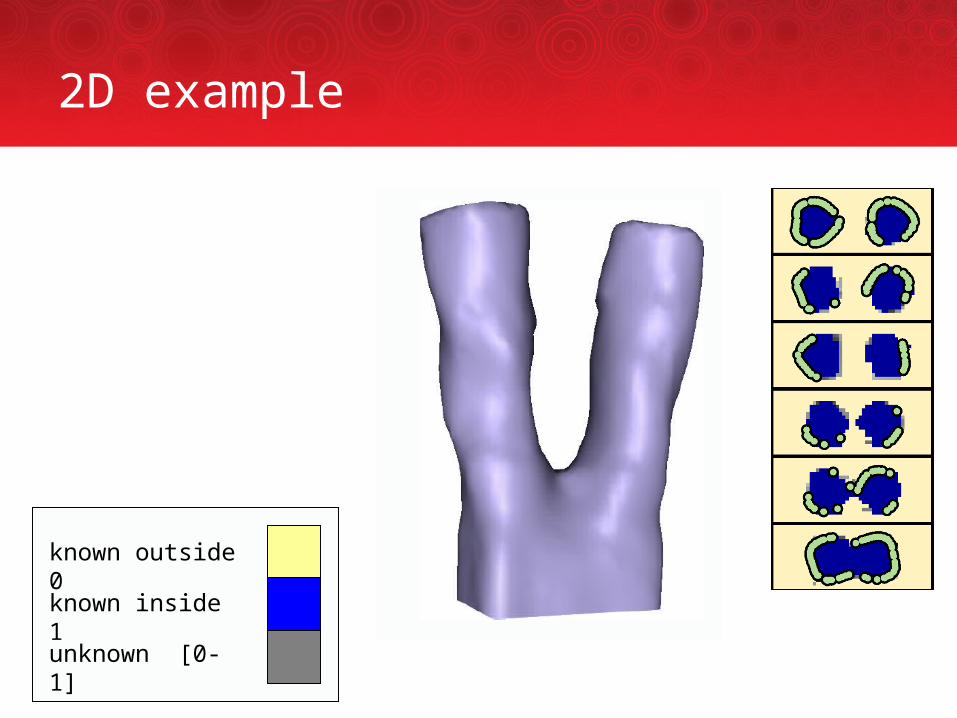
2D example
known outside 0
known inside 1
unknown [0-1]
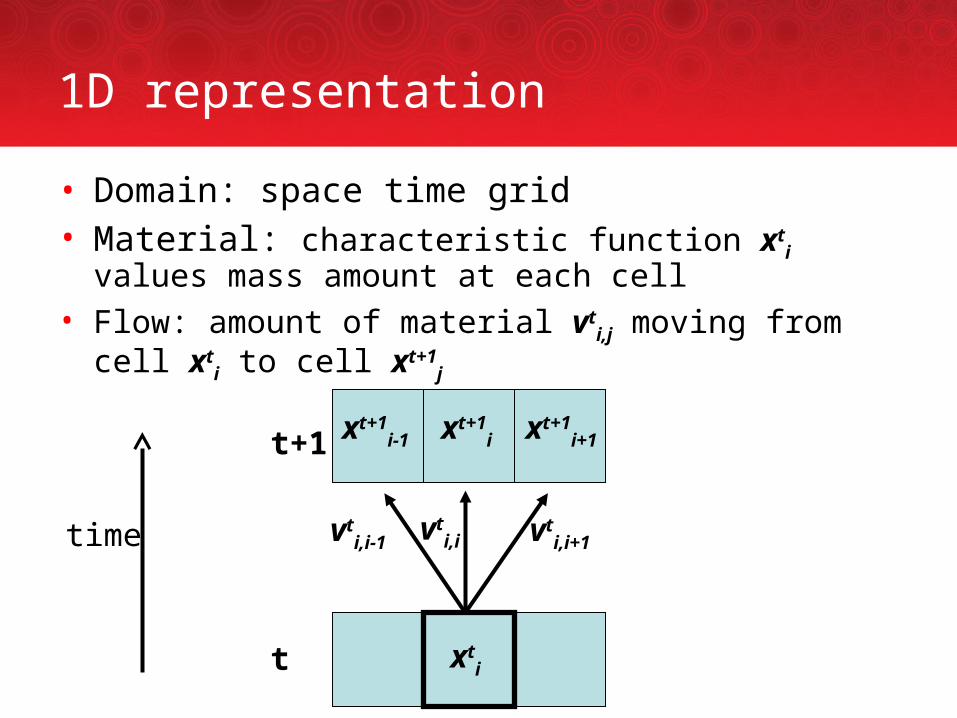
1D representation
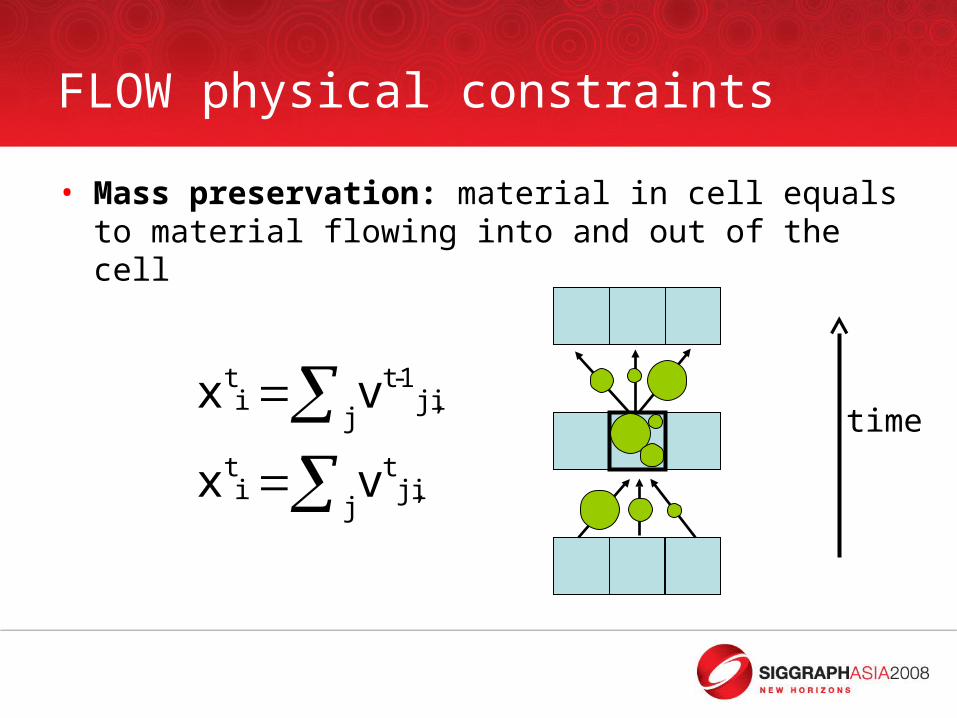
• Domain: space time grid• Material: characteristic function xti values mass amount
at each cell• Flow: amount of material vti,j moving from cell xti to cell xt+1j
vti,i-1 vti,i+1
xt+1i-1 xt+1i xt+1i+1t+1
t
vti,itime
xti
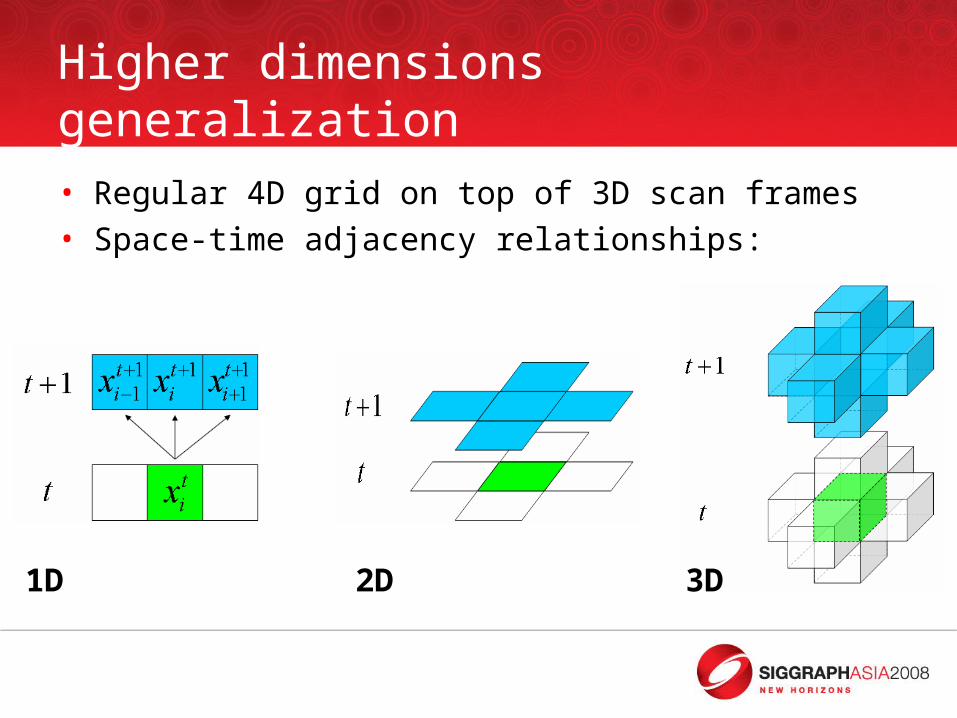
Higher dimensions generalization
• Regular 4D grid on top of 3D scan frames • Space-time adjacency relationships:
1D 2D 3D
FLOW physical constraints
• Mass preservation: material in cell equals to material flowing into and out of the cell
jij,
ti
t
jij,
1-ti
t
v x
v xtime
FLOW physical constraints
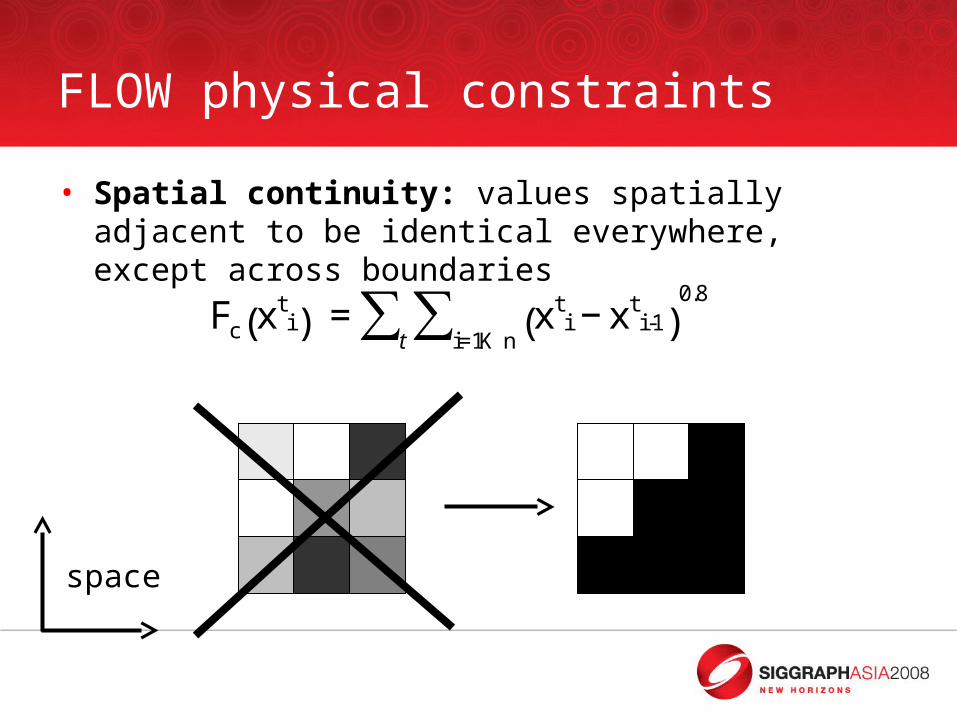
• Spatial continuity: values spatially adjacent to be identical everywhere, except across boundaries
€
Fc xti( ) = xt
i − xti-1( )
0.8
i=1K n∑
t∑
space
FLOW Physical Constraints
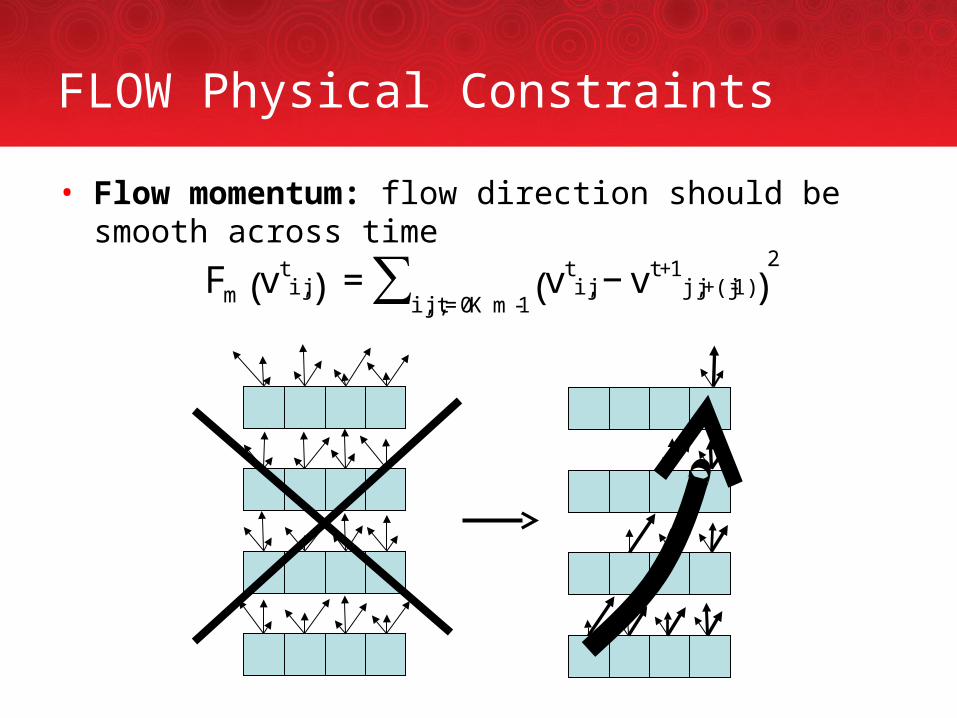
• Flow momentum: flow direction should be smooth across time
€
Fm vti, j( ) = vt
i, j − vt +1j, j+(j-1)( )
2
i, j,t= 0K m -1∑

Constrained Minimization Problem
• Optimization:
• Constraints:– Incompressibility constraints– Boundary values
mc FFF 1
Challenges
• Sublinear exponentiterative reweighted least squares
• Huge matricesfine-tuned iterative solver
• Mass stabilityboundary constraints,
clamping
€
Fc xit
( ) = xit − xi-1
t( )
0.8
i=1K n∑
t∑
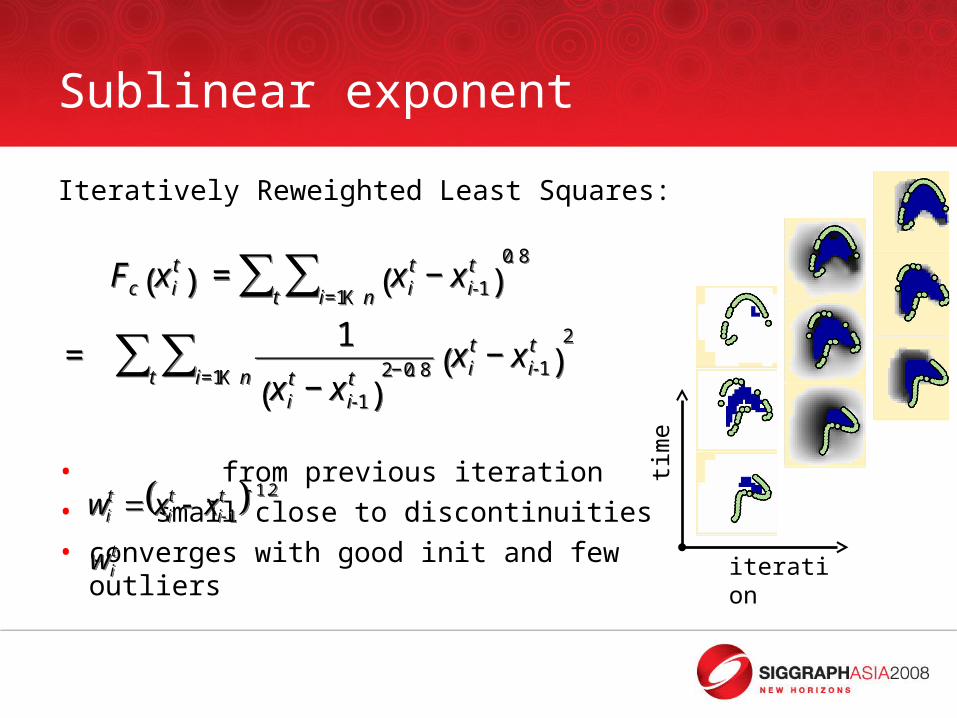
Sublinear exponent
Iteratively Reweighted Least Squares:
• from previous iteration• small close to discontinuities• converges with good init and few outliers
wit
wit
€
Fc x it
( ) = x it − x i-1
t( )
0. 8
i=1K n∑
t∑
=1
x it − x i-1
t( )
2−0. 8 x it − x i-1
t( )
2
i=1K n∑
t∑
€
Fc x it
( ) = x it − x i-1
t( )
0. 8
i=1K n∑
t∑
=1
x it − x i-1
t( )
2−0. 8 x it − x i-1
t( )
2
i=1K n∑
t∑
2.1
1
t
i-ti
ti xxw 2.1
1
t
i-ti
ti xxw
iteration
time
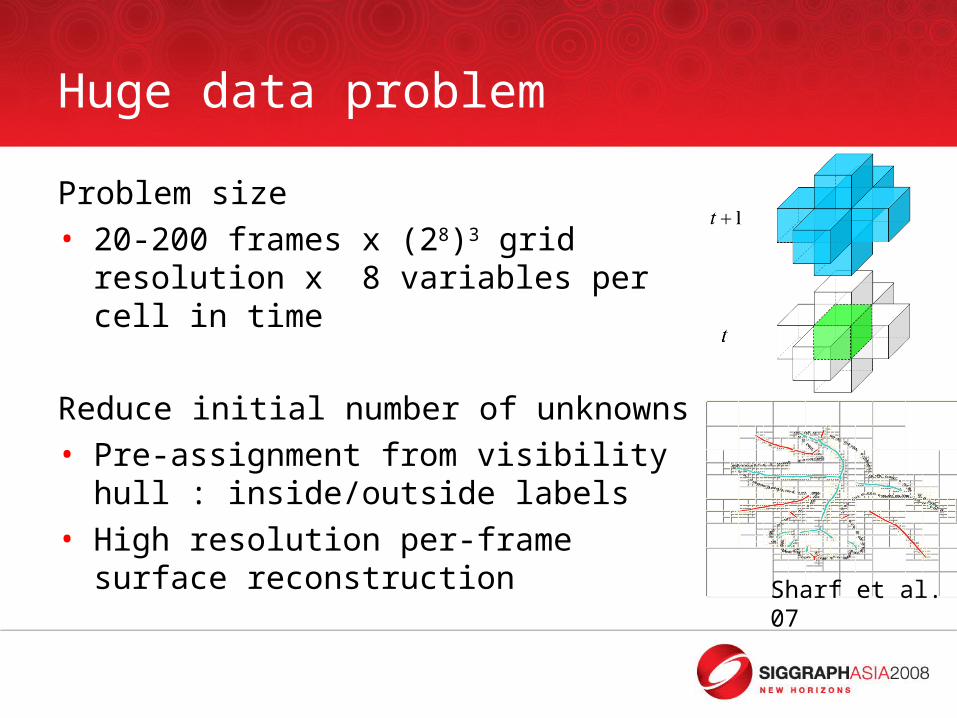
Huge data problem
Problem size• 20-200 frames x (28)3 grid resolution x 8
variables per cell in time
Reduce initial number of unknowns• Pre-assignment from visibility hull :
inside/outside labels• High resolution per-frame surface
reconstruction
Sharf et al. 07
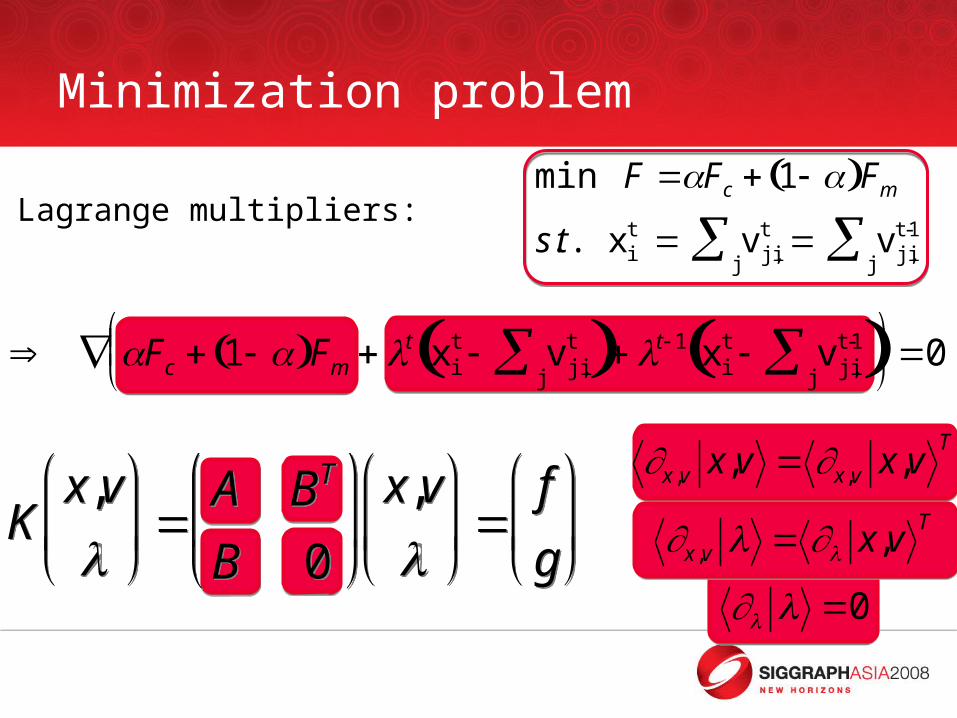
Lagrange multipliers:
Kx,v
A BT
B 0
x,v
f
g
Kx,v
A BT
B 0
x,v
f
g
Minimization problem
Fc 1 Fm t xit v j,i
t
j t 1 xi
t v j,it -1
j
0
min F Fc 1 Fm
s.t. xit v j,i
t
j v j,i
t -1
j
x,v x,v x,v x,vT
x,v x,vT
0
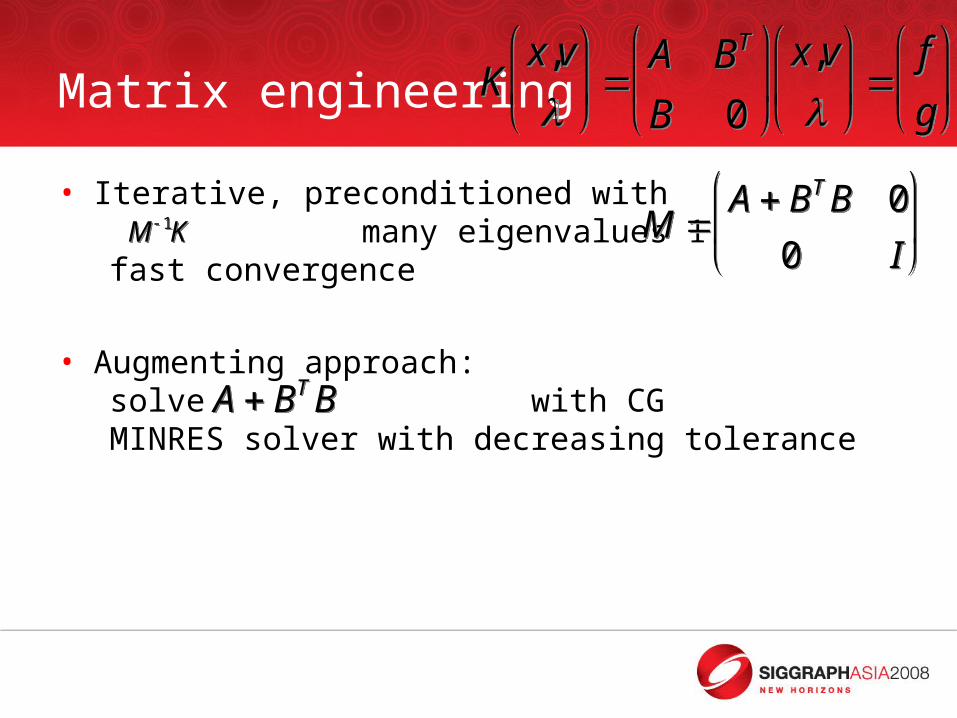
Matrix engineering
• Iterative, preconditioned with many eigenvalues 1 fast convergence
• Augmenting approach: solve with CG MINRES solver with decreasing tolerance
Kx,v
A BT
B 0
x,v
f
g
Kx,v
A BT
B 0
x,v
f
g
M A BT B 0
0 I
M A BT B 0
0 I
M 1K
M 1K
A BT B
A BT B

Mass stability: clamping/back substitution
: amount of mass at cell (i,t) • : inside, outside• clamp • if then adjacent• back-substitution reduces the system size
xit 0,1
xit 0
xit 1
xit
xit 0,1
xit 0
vi,*t 0
iteration
time

Results (2D) – empty frames completion
Results – hand puppet from 2 views

Results - garments

Results – large deformation

Results 3D+time
• 20 frames at constant resolution • Solver converges in 100 iterations.• Time: 1 minute per-frame• 3.73 GHz CPU, memory requirements up to 4.5GB

Thank you!