Analysis of the step and ramp response of a feedback gain-control system
7
Analysis of the step and ramp response of a feedback gain-control system G.R. Hoffman Indexing terms: Audio frequency amplifiers, Feedback, Gain control, Telecommunication systems Abstract: Gain-control systems are used to improve the performance of communication links that are subject to variation of received signal power, and in a variety of techniques designed to increase the signal/noise ratio. The system described here is intended to operate at audio frequencies with the minimum of distortion, and the gain is controlled by the amplitude of a high-frequency (50 kHz) carrier superimposed on the audio signal. Two modes of operation have been investigated, and their response when subjected to step and ramp control signals is analysed mathematically. Theoretical results are expressed in graphical form and are com- pared with measurements obtained from experimental prototype circuits. 1 Introduction The class of gain-control systems considered in this work utilises a high-frequency carrier which is amplitude modu- lated by an inverse form of the control information. The modulated carrier is combined with the audio signal to be processed at the input of a variable-gain amplifier. A frequency-selective negative-feedback circuit seeks always to maintain the amplitude of the carrier appearing at the amplifier output at a constant level and, by this process, determines the gain of the audio signal. In any practical circuit configuration, rapid changes in the control-signal amplitude will result in gain tracking errors during and shortly after each transition period. In the following paragraphs, the theoretical performances of two gain-control circuits with differing feedback arrangements are analysed and compared when they are supplied with control information containing step and ramp transitions. 2 Linear gain-controlled amplifier The small-signal drain resistance r of a field-effect transistor (f.e.t.) can be expressed as r = r 0 V — (1) where V p is the pinch-off voltage, V^ is the gate-source voltage and r 0 is the drain resistance when V^ = 0. The f.e.t. may be arranged in a feedback loop such that the gain of the circuit is linearly related to the gate-source voltage. 1 A circuit of this type is shown in Fig. 1. The input signal is attenuated to ensure that only a small signal will appear across the f.e.t. and is fed into a low-noise integrated ampli- fier. Other components in the feedback line stabilise the operating conditions and determine the minimum gain. When the f.e.t. is turned on, the gain of the circuit is output signal control signal current control signal voltage Fig. 1 Linear gain-controlled amplifier Paper T143E, first received 22nd November 1977 and in revised form 12th January 1978 Prof. Hoffman is with the Electrical Engineering Laboratories, The University, Manchester M13 9PL, England ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2 47 0308-6984'/78/143E-0047 $1-50/0
Transcript of Analysis of the step and ramp response of a feedback gain-control system

Analysis of the step and ramp response ofa feedback gain-control system
G.R. Hoffman
Indexing terms: Audio frequency amplifiers, Feedback, Gain control, Telecommunication systems
Abstract: Gain-control systems are used to improve the performance of communication links that are subjectto variation of received signal power, and in a variety of techniques designed to increase the signal/noise ratio.The system described here is intended to operate at audio frequencies with the minimum of distortion, andthe gain is controlled by the amplitude of a high-frequency (50 kHz) carrier superimposed on the audiosignal. Two modes of operation have been investigated, and their response when subjected to step and rampcontrol signals is analysed mathematically. Theoretical results are expressed in graphical form and are com-pared with measurements obtained from experimental prototype circuits.
1 Introduction
The class of gain-control systems considered in this workutilises a high-frequency carrier which is amplitude modu-lated by an inverse form of the control information. Themodulated carrier is combined with the audio signal to beprocessed at the input of a variable-gain amplifier. Afrequency-selective negative-feedback circuit seeks alwaysto maintain the amplitude of the carrier appearing at theamplifier output at a constant level and, by this process,determines the gain of the audio signal.
In any practical circuit configuration, rapid changes inthe control-signal amplitude will result in gain trackingerrors during and shortly after each transition period. In thefollowing paragraphs, the theoretical performances of twogain-control circuits with differing feedback arrangementsare analysed and compared when they are supplied withcontrol information containing step and ramp transitions.
2 Linear gain-controlled amplifier
The small-signal drain resistance r of a field-effect transistor(f.e.t.) can be expressed as
r = r0 V —(1)
where Vp is the pinch-off voltage, V^ is the gate-sourcevoltage and r0 is the drain resistance when V^ = 0. Thef.e.t. may be arranged in a feedback loop such that the gainof the circuit is linearly related to the gate-source voltage.1
A circuit of this type is shown in Fig. 1. The input signalis attenuated to ensure that only a small signal will appearacross the f.e.t. and is fed into a low-noise integrated ampli-fier. Other components in the feedback line stabilise theoperating conditions and determine the minimum gain.When the f.e.t. is turned on, the gain of the circuit is
outputsignal
control signalcurrent
control signalvoltage
Fig. 1 Linear gain-controlled amplifier
Paper T143E, first received 22nd November 1977 and in revisedform 12th January 1978Prof. Hoffman is with the Electrical Engineering Laboratories, TheUniversity, Manchester M13 9PL, England
ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2 47
0308-6984'/78/143E-0047 $1-50/0

reference current
3
constantamplitudecarrier50kH2
variableamplitudecarrier
ICo
iy* Fig. 2 Linear gain-control system with feedback gain compen-^ sation
0̂

increased. The f.e.t. is a nonlinear device, and if the voltagebetween its drain and source is halved and fed back to thegate, a substantial improvement in the linearity of thecircuit is obtained. (For the circuit shown, the totalharmonic distortion is less than 0-02%). Two emitter-follower buffer stages ensure that signals in the f.e.t. gatecontrol line are isolated from the amplifier input. Thecircuit may be controlled by a voltage or a current input.
3 The feedback gain-control system
A complete gain-control system is shown in some detail inFig. 2. A 50 kHz voltage sinewave, the amplitude of whichdetermines the required gain, is added to the input signalvia a resistive attenuator. At the output of the variable-gainstage, the 50 kHz waveform is extracted by a simple parallel-tuned circuit and is then processed by a synchronousdetector, IC2, run at low quiescent current to enhance thesignal/noise ratio. The output from the detector is fed via acurrent-mirror load (Q6, Q7) into a virtual-earth integratingamplifier IC3. At the virtual-earth point the d.c. componentfrom the synchronous detector is compared with a refer-ence current. The error voltage developed at the amplifieroutput is passed to the feedback gain-compensation stage
audio output
circuit such that y = b/x. Because the audio signal passesthrough the variable-gain stage, its amplitude will also bedetermined by the gain y, which is an inverse function ofthe control signal x. The gain round the feedback loop issufficiently high to ensure that the precision of this oper-ation is mainly determined by the stability of the synchron-ous detector and the reference current, and is independentof the temperature of Q t . However, if the control signal ischanged instantaneously from xx to x2, the gain y is notable to change immediately to the required value.
4 The step response
The circuit of Fig. 2 reappears in block schematic form inFig. 3a. Because the synchronous detector rectifies the50kHz output waveform and transforms it into a current,and because the filter bandwidth is large compared with theintegrator, the schematic may be further simplified(Fig. 3b) so that three of the blocks are replaced by a singlevariable-conductance amplifier block and the control signalx is replaced by a current gain g. Thus, a change in theamplitude of the control signal from xx to x2 is now
t i m e
g
I
gv2
c1 II—1
V Dv2
Fig. 3 Linear gain-control system: schematic diagrams
which consists of an f.e.t., Q8, biased near to 7 ^ toprovide the required characteristic. The output from Q8
is fed to an attenuating current mirror (Q9,Qio), whichhas an extremely high output resistance and suppliescurrent to the potential-divider circuit connected to thegate electrode of the variable-resistance f.e.t. Qx. In theabsence of a compensation circuit, the gain round the feed-back loop would be proportional to the amplitude of the50 kHz input signal. However, the square-law stage Q8 hasa mutual conductance which is a linear function of its inputvoltage, and is therefore able to maintain constant the gainround the feedback loop.
When the control-signal amplitude x is altered, the gain yof the variable-gain circuit changes so that the 50 kHz wave-form measured at the audio-signal output remains at aconstant amplitude b. The system thus acts as a divider
represented by a change in conductance ofg^ to# 2 . Thedifferential equation describing the operation of the circuitmay now be simply described as
dv— = I ~gv \Z)
This equation can be solved by separating the variables, anda suitable solution for a step change of gain from gx to #2 is
v = / - ( l +Ae-t/T)/(l -Ae~tfT) (3)
"This and subsequent equations may appear to have dimensionalanomalies, but it must be remembered that, for example, an elec-tronic multiplier which squares the input voltage has an outputwhose dimension is still a voltage.
ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2 49

where where
^ = n-./M/fi + / * •
and
This result is valid independent of whether g2 is larger orsmaller than gx, and it will be seen that the time constant inthe equation depends on the value of g2.
6 8normalised time
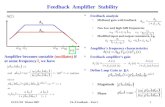
Fig. 4 Theoretical response to a ramp input of gain-controlsystem with compensated feedback
*• = 0a, = 0005a2 = 001a, = 002
0 5V/div
10ms/div
Fig. 5 Linear gain-control circuit with gain-compensated feedback
a 50 kHz modulated ramp inputb F.E.T. gate voltagea = 0-02 sV"1
5 The ramp response
To assist in analysing the system response, a close approxi-mation to the ramp input in the form of a linear staircasewaveform with 10 000 incremental steps over a gain rangeof 16:1 was used. Eqn. 3 may be written as
v = v2
1 -
and
I = gi V? = gi v\
where vx and v2 represent steady-state voltages whichwould be attained if the control signal g was held at aparticular value for a sufficiently long time. This relation-ship will of course give rise to the ideal reciprocal formshown in curve a0 of Fig. 4.
Eqn. 4 was used to compute the value of v at the end ofeach incremental step (which then formed the initial valuefor the succeeding step). Gain-response curves so obtainedfor several values of a are shown in Fig. 4. Lower values ofa correspond to a smaller time constant, and the curvefollows the reciprocal relationship more closely. Curvesassociated with a falling ramp input are also drawn on theright of this Figure.
Experimental results obtained using the circuit in Fig. 2are available for comparison in Fig. 5. The characteristic,shape of the lower waveform corresponds closely to' thecalculated form in the previous Figure.
The product gv2 also determines the audio gain of thesystem, and in the steady state this product is equal to thereference current. However, in the transient condition thegain is in error during the period of a ramp and for a short
Fig. 6 Gain-compensated feedback system: gain error duringrising and falling ramp inputs
ax = 0005a2 = 001a, = 002
0 5V/div
01V/dJv
lOms/div
Fig. 7 Gain tracking error of a gain-compensated feedback circuit
a 50 kHz modulated ramp inputb Variable-gain-stage output waveform
50 ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2

time afterward. Therefore the audio gain will be too largeduring a rising input ramp and too small when the ramp isfalling. The error in gain, v2 \v\ (v^ is the steady-statevalue), can be calculated, and is plotted as a function oftime for several values of a in Fig. 6. Characteristic of thegain errors inherent in this type of feedback system are aninitial hump at the start of the rising ramp and a notchwhich develops on the falling ramp as the required recipro-cal gain slope approaches its maximum value. The notch isthen at its minimum, and thereafter the gain increasestoward unity. This error signal can also be measuredexperimentally at the output of the variable-gain stage, andis shown in Fig. 7.
In pilot tone systems,2'3 the control signals can beadvanced in time relative to corresponding changes in theencoded audio-signal gain. The computed gain-errorpatterns plotted logarithmically for delays of 0, 1%, 2% and3% of the ramp time for both rising and falling ramps, andusing a value for a of 0-01, are shown in Fig. 8. It is evidentthat a considerable reduction in the peak errors can beachieved using this technique.
6 The reciprocal attenuator
It has already been indicated that, for a linear change inamplitude of the control signal, the required relationship ofthe gain in the control circuit is of reciprocal form. Asimple attenuator using a resistance and an f.e.t. is shown inFig. 9. When suitably biased, the small-signal drain resist-ance r varies with the control voltage v according to therelationship
r = r0 ^ (5)v
The attenuator formed by the fixed resistor R and thevariable resistor r has a transfer characteristic y which canbe expressed as
7 =
where
(6)
Fig. 8 Effect of signal delay on gain error response to ramp input
Rinput -output
controlvoltage
Fig. 9 Reciprocal f.e. t. attenuator
ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2
An attenuator of this type provides an output signal whichis inversely related to the control voltage and therefore maybe usefully employed in a feedback gain-controlled system.A simplified block-schematic diagram of this type of feed-back attenuator is shown in Fig. 10. The audio input signaland the control signal-modulated carrier are added togetherby a resistive network at the electronic attenuator input.Many details of the circuit design (e.g. those concernedwith carrier selection and demodulation, reference andfiltering) are substantially similar to those in the circuit ofFig. 2 and have been omitted from the Figure.
The differential equation describing the circuit is
dv __ gaV
dt a + vT (7)
and a suitable solution to this equation for a control-signalinput step from Vx to V2 is
fgaV2
gaV2In
gaVi— v — a +
gaVx
a — v
ItC
(8)
Fig. 10 Sch ematic of reciprocal atten uator gain -con trol circuit
. 0 2 4 6 8 10 12 14normalised time
Fig. 11 Response of reciprocal attenuator to ramp inputs
51

In the steady state,
gaV =J
a + v
and
gaV _ a vIV ~ V VP p r p
where vn is normalised with respect to Vp, and
r0
R(9)
Eqn. 8 can be rewritten as
In 'V2 -
v2 — vt
A(10)
where A = ~— and vx and v2 are normalised steady-state
voltages corresponding to inputs Vx and V2, respectively.This is an intrinsic equation and can be solved for a step
change (from Vx to V2 ) by numerical methods utilising theNewton-Raphson technique. The solution for a ramp inputis obtained in the same way as that described previously.Graphs of gain against time for rising and falling ramp
6 8 10normalised time
Fig. 12 Reciprocal attenuator: gate voltage against time charac-teristics
0 5V/div
2V/div
10ms/div
Fig. 13 Response of f.e.t. gate voltage in reciprocal-attenuatorcircuit to a ramp input
a 50 kHz modulated ramp inputb F.E.T. gate voltageA = 002 s
inputs have been drawn (Fig. 11) using a value for A of 0-4(determined by the integrator time constant), and makingthe ratio R/r0 equal to 100. The curves again refer to achange in gain of 16. A direct comparison between theor-etical and experimental results can more easily be made byplotting the gate voltage as a function of time for variousvalues of A. These curves appear in Fig. 12, together withthe ramps indicating the ideal form of the gate voltage. Theexperimental waveforms of Fig. 13, showing an amplitude-modulated ramp input and the corresponding voltage onthe gate of the f.e.t., correlate extremely well with thetheoretical results of the previous Figure.
The error in gain of this system can be computed, and inFig. 14 theoretical results are plotted for various values oftime constant A. Error coefficients greater than unity aredue to a rising ramp input, and those below unity to afalling ramp. It will be seen that for moderate values of Athe gain error remains approximately constant for bothrising and falling ramp inputs, which is consistent with theuse of reciprocal compensation in the feedback loop. Whenthe ramp input is decreasing, and the value of A is large, itdeparts from the steady error because the gain round thefeedback loop is falling at an increasing rate. The behaviour
A=0-8
normalised time
Fig. 14 Reciprocal attenuator: gain error during rising and fallingramp inputs
0 5V/div
005V/div
10ms/div
Fig. 15 Gain tracking error of a reciprocal-feedback circuita 50 kHz modulated ramp inputb Variable-gain-stage output waveform
52 ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2

of a circuit with a relatively long time constant is .shown inFig. 15. The envelope of the output waveform correspondswell with the theoretical results shown in Fig. 14.
Gain-error patterns can be computed to represent theeffect of advancing the control signals in time, and havebeen plotted logarithmically in Fig. 16 for delays of 0, 1%,2% and 3% of the ramp time. As in the earlier example, areduction in error can be obtained,with this technique, butat the disadvantage of changing the steady error during aramp transition into a much less smooth response.
oFig. 16 Reciprocal attenuator: effect of signal delay on gain errorresponse to ramp input
7 Conclusion
Two precision feedback gain-control systems have beenconsidered in some detail, and, in particular, their responseto a ramp input when acting as a dividing stage has beeninvestigated. The correlation between theoretical andexperimental results is good, and allows the performance ofboth circuits to be verified for the conditions demonstratedand predicted for other forms of control signal not dis-cussed here. It is evident that errors occur during transitionsbetween gain levels, and the magnitude of acceptable errormust be assessed in relation to other imperfections in acomplete system. It is not feasible to increase the band-width by reducing the time constant to too small a value, asthe signal/noise ratio of the system will be impaired. This isbecause any noise present in the control signal is attenuated
by the time constant in the feedback loop. Moreover, thefrequency-doubled carrier signal from the synchronousdetector, operating through the variable-gain stage, beatshigh-frequency noise components down into the audioband. The time constant in the feedback loop must besufficiently large to attenuate this carrier signal to a magni-tude low enough for the effect to be negligible.
The gain-control system with a compensation stage inthe feedback loop is designed to keep the closed-loop gainconstant independent of the degree of attenuation de-manded. It has, however, a nonuniform error response, withpeaks at the start and finish of each input ramp. These ofcourse could be reduced if the form of the input controlsignal is modified at the beginning and end of each tran-sition. The reciprocal attenuator feedback circuit, on theother hand, has an error response which is virtually steadyduring a gain transition. The gain round the feedback loopvaries and becomes larger as the control signal is reduced.This corresponds to a reduction in bandwidth round thefeedback loop for low-level output signals, thus enhancingthe signal/noise ratio at these levels. Furthermore, theimpedance of the f.e.t. is low and its contribution as a noisesource is diminished.
8 Acknowledgments
The author would like to thank L.S. Piggott for his initialassistance in solving the differential equations, and D. Kingfor his considerable help with the numerical computation.
References
SHERWIN, J.: 'A linear multiple gain-controlled amplifier', NewElectron., 1975, 8, p. 26BEDFORD, L.H.: 'Improving the dynamic range of tape record-ing', Wireless World, 1960, 66, p. 104HOFFMAN, G.R., and BIRTWISTLE, J.H.: 'Pilot-tone noise-reduction system using quantised control signals', IEE J.Electron. Circuits & SySt., 1977, 1, (3), pp. 95 -98
G.R. Hoffman spent three years in theRoyal Air Force before, returning tothe University of St. Andrews, wherehe received an Honours degree inphysics in 1950. In 1954 he received aPh.D. degree in electrical engineeringfrom Manchester University. Afterholding every Academic post fromAssistant Lecturer to Reader he was
I appointed Professor of ElectricalEngineering in 1966. His research
interests include electronic circuitry, electroluminescence,ultra-high vacuum, thin ferromagnetic films, thin dielectricfilms, quartz-crystal deposition monitoring, optical fibres,computer graphics, electron-beam lithography and noise-reduction systems.
ELECTRONIC CIRCUITS AND SYSTEMS, MARCH 1978, Vol. 2, No. 2 53


















