
Specifying Optical Fiber Cable. Cable Parameters and Typical Values.

Analysis of the impact of parameters values
on the Genetic Algorithm for TSP
Avni Rexhepi1, Adnan Maxhuni2, Agni Dika3
1,2,3 Faculty of Electrical and Computer Engineering, University of Pristina, Kosovo
Abstract
Genetic algorithms (GAs) are multi-dimensional and stochastic
search methods, involving complex interactions among their
parameters. Researchers have been trying to understand the
mechanics of GA parameter interactions by using various
techniques. It still remains an open question for practitioners as
to what values of GA parameters (such as population size, choice
of GA operators, operator probabilities, and others) to use in an
arbitrary problem.
Genetic algorithm (GA) parameters are explored to minimize the
time needed to find a solution. The basic GA code stays the same
throughout the entire system. Variable parameters include
mutation rate, crossover rate, crossover operator, number of
generations, population size, etc. When an optimization problem
is encoded using genetic algorithms, one must address issues of
population size, crossover and mutation operators and
probabilities, stopping criteria, selection operator and pressure,
and fitness function to be used in order to solve the problem.
This paper tests a relationship between (1) size of initial
population, (2) mutation probability, and (3) number of
generations in runs of Genetic Algorithm for solving the TSP.
TSP is an NP hard problem, so using Genetic Algorithm we can
find a solution on reasonable amount of time. In this paper we
describe the results of the solution for the Traveling Salesman
Problem (TSP) for Kosovo municipalities, using the genetic
algorithm, with different settings for the parameters of the
Genetic Algorithm [12].
Keywords: Genetic Algorithms, TSP, Parameter Selection,
Initial Population, Crossover, Mutation
1. Introduction
TSP is a problem, where traveling salesman wants to visit
each of a set of cities exactly once, starting from
hometown and returning to his hometown. His problem is
to find the shortest route for such a trip. TSP has a model
character in many branches of Mathematics, Computer
Science, Operations Research, etc. Linear programing,
heuristics and branch and bound which are main
components for the most successful approaches to hard
combinatorial optimization problems, were first formulated
for the TSP and used to solve practical problem instances
in 1954 by Dantzig, Fulkerson and Johnson.
When the theory of NP-completeness developed, the TSP
was one of the first problems to be proven NP-hard by
Karp in 1972. New algorithmic techniques have first been
developed for or at least have been applied to the TSP to
show their effectiveness. Such examples are branch and
bound, Lagrangean relaxation, Lin-Kernighan type
methods, simulated annealing, etc. [3].
Representation model is: Let Kn=(Vn, En) be the complete
undirected graph with n=|Vn| nodes and m=|En|=
2
n
edges. An edge e with endpoints i and j is also denoted by
ij, or by (i,j). We denote by REn
the space of real vectors
whose components are indexed by the elements of En. The
component of any vector nz ER indexed by the edge
e=ij is denoted by ze, zij, or z(i,j).
Given an objective function nc ER , that associates a
“length” ce with every edge e of Kn, the symmetric
traveling salesman problem consists of finding a
Hamiltonian cycle such that its c-length (the sum of the
lengths of its edges) is as small as possible.
Of special interest are the Euclidean instances of the
traveling salesman problem. In these instances the nodes
defining the problem correspond to points in the two-
dimensional plane and the distance between two nodes is
the Euclidean distance between their corresponding points.
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 158
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.

More generally, instances that satisfy the triangle
inequality, i.e., ikjkij ccc for all the three distinct i,j
and k, are of particular interest.
For our case, we consider the locations of the
cities/municipalities in Kosovo map as nodes of the graph.
For to do this, we take their geographic coordinates and
then based on that, we calculate their position in our map
scaled to a smaller size, for to calculate the real positions
and distances, by using the real life values for distances in
kilometers between the cities.
2. Genetic Algorithms
Genetic Algorithms (GA) [1,2] are computer algorithms
that search for good solutions to a problem within a large
number of possible solutions. They were proposed and
developed in the 1960s by John Holland, his students, and
his colleagues at the University of Michigan. These
computational paradigms were inspired by the mechanics
of natural evolution, including survival of the fittest,
reproduction, and mutation. These mechanics are well
suited to resolve a variety of practical problems, including
computational problems, in many fields. Some applications
of GAs are optimization, automatic programming, machine
learning, economics, immune systems, population genetic,
and social system.
GAs have been successfully applied to many problems of
business, engineering, and science. Because of their
operational simplicity and wide applicability, GAs play an
important role in computational optimization and
operations research [6].
The genetic algorithm transforms a population (set) of
individual objects, each with an associated fitness value,
into a new generation of the population using the
Darwinian principle of reproduction and survival of the
fittest and analogs of naturally occurring genetic operations
such as crossover (sexual recombination) and mutation.
Each individual in the population represents a possible
solution to a given problem. The genetic algorithm
attempts to find a very good (or best) solution to the
problem by genetically breeding the population of
individuals over a series of generations.
2.1 Basic elements of GAs
Most GAs methods are based on the following elements:
populations of chromosomes, selection according to
fitness, crossover to produce new offspring, and random
mutation of new offspring. The chromosomes in GAs
represent the space of candidate solutions. Possible
chromosomes encodings are binary, permutation, value,
and tree encodings. GAs require a fitness function which
allocates a score to each chromosome in the current
population. Thus, it can calculate how well the solutions
are coded and how well they solve the problem [2].
The selection process is based on fitness. Chromosomes
that are evaluated with higher values (fitter) will most
likely be selected to reproduce, whereas, those with low
values will be discarded. The fittest chromosomes may be
selected several times, however, the number of
chromosomes selected to reproduce is equal to the
population size, therefore, keeping the size constant for
every generation. This phase has an element of randomness
just like the survival of organisms in nature. The most used
selection methods, are roulette-wheel, rank selection,
steady-state selection, and some others. Moreover, to
increase the performance of GAs, the selection methods
are enhanced by elitism. Elitism is a method, which first
copies a few of the top scored chromosomes to the new
population and then continues generating the rest of the
population. Thus, it prevents losing the few best found
solutions.
Crossover is the process of combining the bits of one
chromosome with those of another to create an offspring
for the next generation that inherits traits of both parents.
Mutation is performed after crossover to prevent falling all
solutions in the population into a local optimum of solved
problem.
So, general outline of basic GA is:
1. Start: Randomly generate a population of N
chromosomes.
2. Fitness: Calculate the fitness of all chromosomes.
3. Create a new population:
a. Selection: According to the selection method select 2
chromosomes from the population.
b. Crossover: Perform crossover on the 2 chromosomes
selected.
c. Mutation: Perform mutation on the chromosomes
obtained.
4. Replace: Replace the current population with the new
population.
5. Test: Test whether the end condition is satisfied. If so,
stop. If not, return the best solution in current population
and go to Step 2.
Each iteration of this process is called generation.
The genetic algorithm object determines which individuals
should survive, which should reproduce, and which should
die. It also records statistics and decides how long the
evolution should continue. A typical genetic algorithm will
run forever, so we must build functions for specifying
when the algorithm should terminate. These include
terminate-upon generation, in which you specify a certain
number of generations for which the algorithm should run,
and terminate-upon-convergence, in which you specify a
value to which the best-of-generation score should
converge. One can customize the termination function to
use own stopping criterion and must tell the algorithm
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 159
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.

when to stop. Often the number-of generations is used as a
stopping measure, but you can use goodness-of-best-
solution, convergence-of-population, or any problem-
specific criterion if you prefer.
There are some flavors of genetic algorithms. For example,
the first is the standard 'simple genetic algorithm' described
by Goldberg in his book [2]. This algorithm uses non-
overlapping populations and optional elitism. Each
generation the algorithm creates an entirely new population
of individuals. The second is a 'steady-state genetic
algorithm' that uses overlapping populations. In this
variation, you can specify how much of the population
should be replaced in each generation. The third variation
is the 'incremental genetic algorithm', in which each
generation consists of only one or two children. The
incremental genetic algorithms allow custom replacement
methods to define how the new generation should be
integrated into the population. So, for example, a newly
generated child could replace its parent, replace a random
individual in the population, or replace an individual that is
most like it. The fourth type is the 'deme' genetic
algorithm. This algorithm evolves multiple populations in
parallel using a steady-state algorithm. Each generation the
algorithm migrates some of the individuals from each
population to one of the other populations.
The base genetic algorithm class contains operators and
data common to most genetic algorithms.
The genetic algorithm contains the statistics, replacement
strategy, and parameters for running the algorithm. The
population object, a container for genomes, also contains
some statistics as well as selection and scaling operators.
The number of function evaluations is a good way to
compare different genetic algorithms with various other
search methods[3]. The basic algorithm is as follows:
Figure 1 – Genetic Algorithm
2.2 TSP
In order to calculate the shortest traveling distance from an
initial city, by visiting each one only once and returning to
the initial one, we consider the locations as nodes of the
graph, in the graph model. In the meantime, the distances
between the cities are edges of the graph.
For length of the edges we take inter-city distances in
kilometers. We have created a matrix of distances between
all the municipalities, where the matrix elements cij are
elements of the square symmetrical matrix, since distance
ij is equal to the distance in the other side ji. The diagonal
of the matrix will contain zero values, since diagonal
elements of the matrix cij, where i=j, will represent the
distance of the city to itself, so in fact it will be the
traveling distance of zero kilometers, therefore these
elements will be equal to cij=0.
By using complete graph in the definition of the TSP, the
existence of a feasible solution is guaranteed, while for
general graphs deciding the existence of a Hamiltonian
cycle is an NP-complete problem. The number of
Hamiltonian cycles in Kn, i.e. the size of the set of feasible
solutions of the TSP is (n-1)!/2.
The algorithmic treatment of the TSP ensures an
approximation algorithm that cannot guarantee to find the
optimum, but which is the only available technique to find
a good solution to a large problem instances. To assess the
quality of a solution, one has to be able to compute a lower
bound on the value of the shortest Hamiltonian cycle.
We have built an application in C#, with an image with the
small-scaled size of the Kosovo map, with depicted
municipality boundaries and locations (Figure 2).
It is possible to select a particular city by clicking on the
map and we have also added buttons that make it possible
to create locations for the biggest cities and locations for
the all municipalities.
Figure 2 – Screenshot of the application
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 160
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.

We used the geographical coordinates of the cities, to
calculate their positions. By running the application, we
can calculate the shortest traveling distance between the
selected cities, by finding a solution of the TSP using a
genetic algorithm.
User can set up the values for initial population, maximal
number of generations, size of the group, percentage of
mutations and number of close cities/locations (used by the
algorithm, while finding closest locations).
3. Simulation and Results
We analyzed the results of different cases with different
values for the parameters of initial population, probability
of mutation and number of generations.
Firstly, we have set the value of the maximal number of
generations to 10,000 and we calculated the fitness for the
cases where the size of the initial population is: 1000, 5000
and 10000 and for each of these cases, we calculated the
results for the mutation rate of: 1%, 3%, 5% and 10% (as
in Figures: 3, 4 and 5).
Then, we compared the results for each value of the
mutation rate (1%, 3%, 5% and 10%), with different values
of the initial population parameter values (1000, 5000 and
10000, as in Figures: 6, 7, 8 and 9).
We repeated this for the values of maximal number of
generations of 50,000 and 100,000, too (see Appendix).
In each figure, the y-axis is the value of the fitness and the
x-axis is the maximal number of generations, which serves
as the interruption parameter for the genetic algorithm.
Figure 3 – Initial population size: 1000; pm=1%, 3%, 5% and 10%.
Figure 4 – Initial population size: 5000; pm=1%, 3%, 5% and 10%.
Figure 5 – Initial population size: 10000; pm=1%, 3%, 5% and 10%.
Now we present the results for the cases when, for some
particular probability of mutation, we take different values
for the parameter of the Initial Population. In Figure 6 we
show the changes in fitness for different values of the
number of initial population, having the same probability
of mutation (pm=1%). Similarly, for other pm values (3%,
5% and 10%), in Figure 7, 8 and 9.
Figure 6 – pm=1%,; Initial population sizes: 1000, 5000 and 10000.
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 161
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.

Figure 7 - pm=3%,; Initial population sizes: 1000, 5000 and 10000
Figure 8 - pm=5%,; Initial population sizes: 1000, 5000 and 10000
Figure 9 - pm=10%,; Initial population sizes: 1000, 5000 and 10000
4. Conclusions
Since the use of correct population size is a crucial factor
for successful GA applications, more efforts need to be
spent in finding correct population sizing estimates for
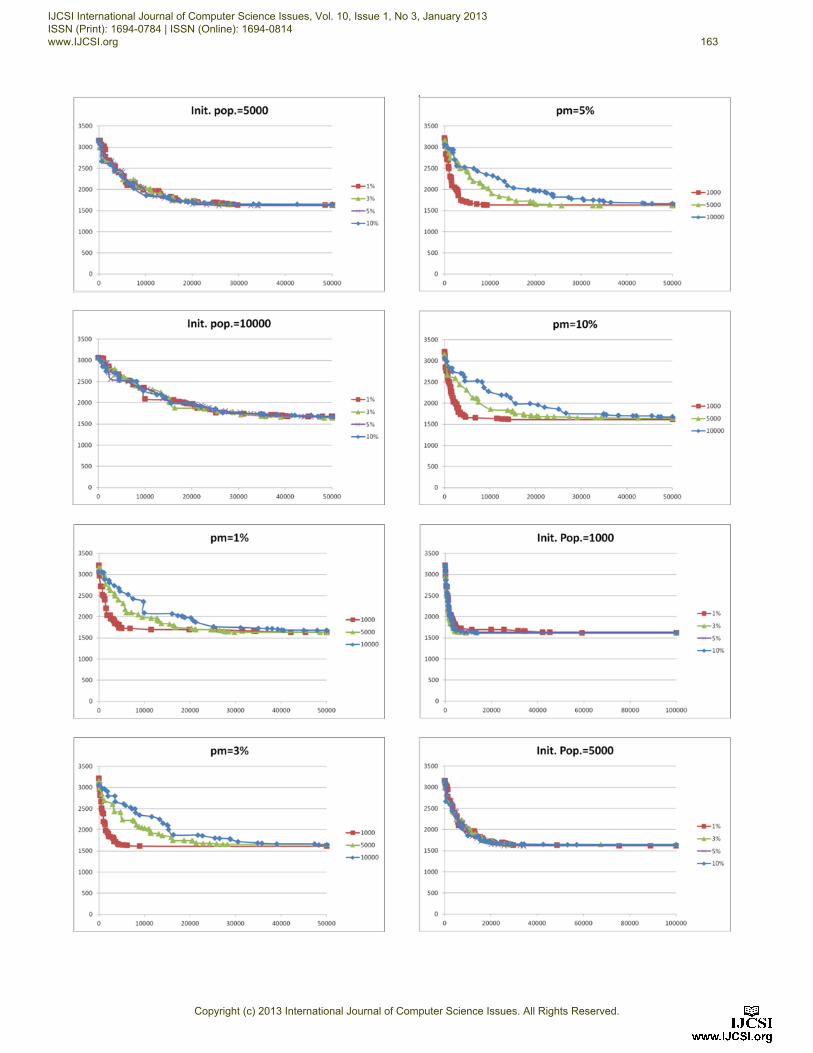
particular problems. Our results show that there is a slight
or no difference in fitness results for the case of TSP with
GA, for different values of the initial population size, with
all tested values of mutation parameter. So increasing the
mutation rate doesn’t contribute to a better results.
There is no use of increasing the value of the probability of
mutation, since it doesn’t pay-off as it increases the
execution time/processor time and doesn’t contribute to a
much better fitness result.
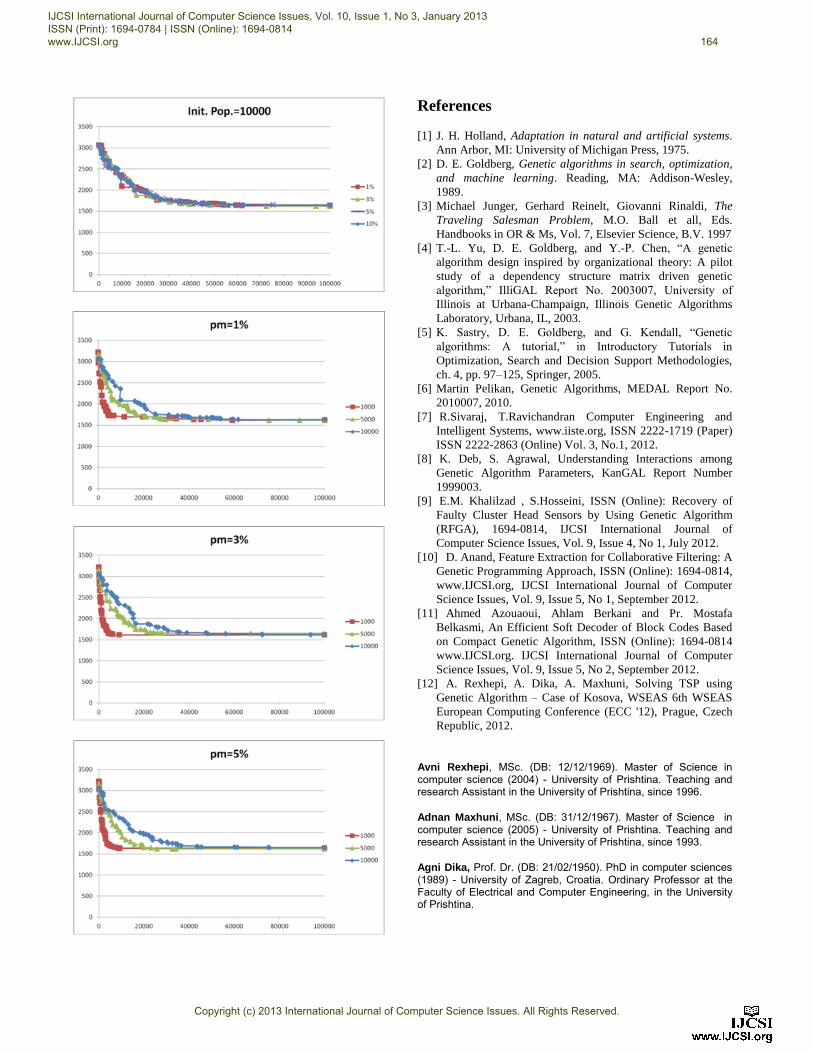
Considering the effect of changing the initial population
size for fixed mutation rate, we see that the effect of the
mutation is important for small initial populations, since it
contributes to promoting new solutions in the solution
space.
For each percentage of the mutation, results show that the
bigger the value of the initial population, the less is the
fitness value improved.
The effect of mutation is especially noticed in the first
generations of the cases with small value of the intimal
population (when there is no enough number of good
solutions). Otherwise, when the initial population is of
higher value, it means that there is a higher diversity of
solutions and so the mutation doesn’t bring much new and
better solutions.
When the population is large, the diversity in the initial
random population is large and the best solution in the
population is expected to be close to the optimal solution.
Appendix
Here we will present the results for the cases when the
value of the parameter of maximal number of generations
is: 50,000 and 100,000.
For each value of the number of generations, we present
the results for cases with values of the initial population
(1000, 5000 and 10000) for different values of the
probability of mutation (1%, 3%, 5% and 10%) and then
cases with same probabilities of mutation for different
values of initial population (1000, 5000 and 10000) .
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 162
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 163
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.
References
[1] J. H. Holland, Adaptation in natural and artificial systems.
Ann Arbor, MI: University of Michigan Press, 1975.
[2] D. E. Goldberg, Genetic algorithms in search, optimization,
and machine learning. Reading, MA: Addison-Wesley,
1989.
[3] Michael Junger, Gerhard Reinelt, Giovanni Rinaldi, The
Traveling Salesman Problem, M.O. Ball et all, Eds.
Handbooks in OR & Ms, Vol. 7, Elsevier Science, B.V. 1997
[4] T.-L. Yu, D. E. Goldberg, and Y.-P. Chen, “A genetic
algorithm design inspired by organizational theory: A pilot
study of a dependency structure matrix driven genetic
algorithm,” IlliGAL Report No. 2003007, University of
Illinois at Urbana-Champaign, Illinois Genetic Algorithms
Laboratory, Urbana, IL, 2003.
[5] K. Sastry, D. E. Goldberg, and G. Kendall, “Genetic
algorithms: A tutorial,” in Introductory Tutorials in
Optimization, Search and Decision Support Methodologies,
ch. 4, pp. 97–125, Springer, 2005.
[6] Martin Pelikan, Genetic Algorithms, MEDAL Report No.
2010007, 2010.
[7] R.Sivaraj, T.Ravichandran Computer Engineering and
Intelligent Systems, www.iiste.org, ISSN 2222-1719 (Paper)
ISSN 2222-2863 (Online) Vol. 3, No.1, 2012.
[8] K. Deb, S. Agrawal, Understanding Interactions among
Genetic Algorithm Parameters, KanGAL Report Number
1999003.
[9] E.M. Khalilzad , S.Hosseini, ISSN (Online): Recovery of
Faulty Cluster Head Sensors by Using Genetic Algorithm
(RFGA), 1694-0814, IJCSI International Journal of
Computer Science Issues, Vol. 9, Issue 4, No 1, July 2012.
[10] D. Anand, Feature Extraction for Collaborative Filtering: A
Genetic Programming Approach, ISSN (Online): 1694-0814,
www.IJCSI.org, IJCSI International Journal of Computer
Science Issues, Vol. 9, Issue 5, No 1, September 2012.
[11] Ahmed Azouaoui, Ahlam Berkani and Pr. Mostafa
Belkasmi, An Efficient Soft Decoder of Block Codes Based
on Compact Genetic Algorithm, ISSN (Online): 1694-0814
www.IJCSI.org. IJCSI International Journal of Computer
Science Issues, Vol. 9, Issue 5, No 2, September 2012.
[12] A. Rexhepi, A. Dika, A. Maxhuni, Solving TSP using
Genetic Algorithm – Case of Kosova, WSEAS 6th WSEAS
European Computing Conference (ECC '12), Prague, Czech
Republic, 2012.
Avni Rexhepi, MSc. (DB: 12/12/1969). Master of Science in computer science (2004) - University of Prishtina. Teaching and research Assistant in the University of Prishtina, since 1996.
Adnan Maxhuni, MSc. (DB: 31/12/1967). Master of Science in computer science (2005) - University of Prishtina. Teaching and research Assistant in the University of Prishtina, since 1993.
Agni Dika, Prof. Dr. (DB: 21/02/1950). PhD in computer sciences (1989) - University of Zagreb, Croatia. Ordinary Professor at the Faculty of Electrical and Computer Engineering, in the University of Prishtina.
IJCSI International Journal of Computer Science Issues, Vol. 10, Issue 1, No 3, January 2013 ISSN (Print): 1694-0784 | ISSN (Online): 1694-0814 www.IJCSI.org 164
Copyright (c) 2013 International Journal of Computer Science Issues. All Rights Reserved.


















