Analysis of Problems in Dynamics by Electronic Circuits
9
PROCEEDINGS OF THE I.R.E. Analysis of Problems in Dynamics by Electronic Circuits* JOHN R. RAGAZZINIt, MEM1BER, I.R.E., ROBERT H. RANDALLt, AND FREDERICK A. RUSSELL§, MEMBER, I.R.E. Summary-This paper describes a method for obtaining an engi- neering solution for integrodifferential equations of physical systems using an electronic system. The components consist of standard plug-in feed-back amplifier units. As the interconnections are wires, resistors, and capacitors, no complicated mechanical layout prob- lem is involved and a generally flexible analyzer need not be set up, for it is a simple matter to assemble the particular circuit for any sys- tem of equations for which solutions are desired. The system should, therefore, be of interest to those involved in a study of the dynamics of physical systems. I. INTRODUCTION r HE FORMULATION of electrical analogs of dy- namic problems in fields other than electrical has long been used to obtain solutions for such prob- lems.' Then, in most cases, a physically realizable net- work may be synthesized to fit the equations and a network used to obtain the electrical outputs represent- ing the solution of the equations.2 For complicated prob- lems this method does not usually result in a network whose individual parameters correspond to the individ- ual parameters of the original system, so that experi- mentation in the nature of varying the parameters is not simple. This objection is largely overcome through the generous use of isolating amplifiers within the elec- trical network. Until the modern methods of feed-back stabilization were developed, the use of amplifiers in- ti-oduced complicating circuit elements which altered with variation in tube characteristics. The other method of attack on problems of this type has been through the use of the mechanical differential analyzer" having as its basic tool an ingenious mechanical integrator, recently improved through the use of a polarized-light servo-operated torque amplifier.4 5 The technique described herein employs as its basic tool a stabilized feed-back amplifier of standard design,6 * Decimal classification: 621.375.2. Original manuscript received by the Institute, April 30, 1946; revised manuscript received, Septem- ber 25, 1946. t Columbia University, New York, N. Y. t City College of New York, N. Y. § Newark College of Engineering, Newark, N. J. 1 M. F. Gardner and J. L. Barnes, 'Transients in Linear System," John Wiley and Sons, New York, N. Y., 1942. 2 H.W. Bode, "Network Analysisand Feedback Amplifier Design," D. Van Nostrand Co., Inc., New York, N. Y., 1945. 3 V. Bush, "The differential analyser," Jour. Frank. Inst., vol. 212, pp. 447-448; October, 1931. 4 H. P. Kuehni and H. A. Peterson, "A new differential analyser," Trans. A.I.E.E., (Elec. Eng.), vol. 63, pp. 221-228; May, 1944. 5 T. M. Berry, "Polarized light servo-system," Trans. A.I.E.E. (Elec. Eng.), vol. 63, pp. 195-197; April, 1944. 6 E. L. Ginzton, "DC amplifier techniques," Electronics, pp. 98- 102; March, 1944. which by mere external changes in connection will serve as integrator, differentiator and sign changer. Professor J. B. Russell of Columbia University first brought these techniques to the attention of the authors in the circuits employed in the Western Electric M-IX antiaircraft gun director.' As an amplifier so connected can perform the mathematical operations of arithmetic and calculus on the voltages applied to its input, it is hereafter termed an "operational amplifier." The operations can be per- formed to any desired degree of precision, providing power supplies of excellent regulation and circuit com- ponents of high precision are used. For most engineering computations, ordinary circuit components are ade- quate. II. OPERATIONAL AMPLIFIERS The term "operational amplifier" is a generic term applied to amplifiers whose gain functions are such as to enable them to perform certain useful operations such as summation, integration, differentiation, or a com- bination of such operations. In view of the fact that Fig. 1-Direct-current amplifier for use in electronic computers. many operations involve steady or slowly changing inputs, the inherent frequency response of such ampli- fiers must extend down to zero frequency. The base unit in the operational amplifier is generally a direct-current amplifier having an odd number of stages. The unit shown in Fig. 1 was developed specifically for general laboratory use. However, any well-designed, stable, di- rect-current amplifier having an odd number of stages, or an equivalent phase shift, is adaptable to the uses which will be described. 7 Instruction booklet prepared by the Bell Telephone Laboratories for the Western Electric M-IX antiaircraft gun director. 444 May
Transcript of Analysis of Problems in Dynamics by Electronic Circuits

PROCEEDINGS OF THE I.R.E.
Analysis of Problems in Dynamics byElectronic Circuits*
JOHN R. RAGAZZINIt, MEM1BER, I.R.E., ROBERT H. RANDALLt, AND
FREDERICK A. RUSSELL§, MEMBER, I.R.E.
Summary-This paper describes a method for obtaining an engi-neering solution for integrodifferential equations of physical systemsusing an electronic system. The components consist of standardplug-in feed-back amplifier units. As the interconnections are wires,resistors, and capacitors, no complicated mechanical layout prob-lem is involved and a generally flexible analyzer need not be set up,for it is a simple matter to assemble the particular circuit for any sys-tem of equations for which solutions are desired. The system should,therefore, be of interest to those involved in a study of the dynamicsof physical systems.
I. INTRODUCTION
r HE FORMULATION of electrical analogs of dy-namic problems in fields other than electrical haslong been used to obtain solutions for such prob-
lems.' Then, in most cases, a physically realizable net-work may be synthesized to fit the equations and anetwork used to obtain the electrical outputs represent-ing the solution of the equations.2 For complicated prob-lems this method does not usually result in a networkwhose individual parameters correspond to the individ-ual parameters of the original system, so that experi-mentation in the nature of varying the parameters isnot simple. This objection is largely overcome throughthe generous use of isolating amplifiers within the elec-trical network. Until the modern methods of feed-backstabilization were developed, the use of amplifiers in-ti-oduced complicating circuit elements which alteredwith variation in tube characteristics. The other methodof attack on problems of this type has been throughthe use of the mechanical differential analyzer" havingas its basic tool an ingenious mechanical integrator,recently improved through the use of a polarized-lightservo-operated torque amplifier.4 5The technique described herein employs as its basic
tool a stabilized feed-back amplifier of standard design,6
* Decimal classification: 621.375.2. Original manuscript receivedby the Institute, April 30, 1946; revised manuscript received, Septem-ber 25, 1946.
t Columbia University, New York, N. Y.t City College of New York, N. Y.§ Newark College of Engineering, Newark, N. J.1 M. F. Gardner and J. L. Barnes, 'Transients in Linear System,"
John Wiley and Sons, New York, N. Y., 1942.2 H.W. Bode, "Network Analysisand Feedback Amplifier Design,"
D. Van Nostrand Co., Inc., New York, N. Y., 1945.3 V. Bush, "The differential analyser," Jour. Frank. Inst., vol. 212,
pp. 447-448; October, 1931.4 H. P. Kuehni and H. A. Peterson, "A new differential analyser,"
Trans. A.I.E.E., (Elec. Eng.), vol. 63, pp. 221-228; May, 1944.5 T. M. Berry, "Polarized light servo-system," Trans. A.I.E.E.
(Elec. Eng.), vol. 63, pp. 195-197; April, 1944.6 E. L. Ginzton, "DC amplifier techniques," Electronics, pp. 98-
102; March, 1944.
which by mere external changes in connection will serveas integrator, differentiator and sign changer. ProfessorJ. B. Russell of Columbia University first brought thesetechniques to the attention of the authors in the circuitsemployed in the Western Electric M-IX antiaircraft gundirector.' As an amplifier so connected can perform themathematical operations of arithmetic and calculus onthe voltages applied to its input, it is hereafter termedan "operational amplifier." The operations can be per-formed to any desired degree of precision, providingpower supplies of excellent regulation and circuit com-ponents of high precision are used. For most engineeringcomputations, ordinary circuit components are ade-quate.
II. OPERATIONAL AMPLIFIERS
The term "operational amplifier" is a generic termapplied to amplifiers whose gain functions are such asto enable them to perform certain useful operations suchas summation, integration, differentiation, or a com-bination of such operations. In view of the fact that
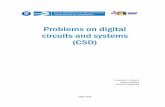
Fig. 1-Direct-current amplifier for use in electronic computers.
many operations involve steady or slowly changinginputs, the inherent frequency response of such ampli-fiers must extend down to zero frequency. The base unitin the operational amplifier is generally a direct-currentamplifier having an odd number of stages. The unitshown in Fig. 1 was developed specifically for generallaboratory use. However, any well-designed, stable, di-rect-current amplifier having an odd number of stages,or an equivalent phase shift, is adaptable to the useswhich will be described.
7 Instruction booklet prepared by the Bell Telephone Laboratoriesfor the Western Electric M-IX antiaircraft gun director.
444 May

Ragazzini, Randall, and Russell: Analysis of Problems in Dynamics by Electronic Circuits
The basic equation of the operational amplifier maybe derived by reference to Fig. 2. Here, if it is assumedthat the box marked A is a direct-current amplifier and
Fig. 2-Block diagram for basic feedback computation.
that the input at o is connected directly to the grid ofthe first tube, the currents at the junction o must addup to zero. Thus,
il =?2
or,
ei - el' ei' + e2(1
Zi(p) Zf(p)
where the voltages ei, e2, and el' are functions of timeand Zi(p) and Zf(p) are used in the manner of theHeaviside impedance operators. It is noted that, if Ais the voltage gain of the amplifier,
e2 = Aei'. (2)
Using this relation and simplifying (1),
Z(p) Z (p)('
If the amplifier gain A is made sufficiently large (5000is a practicable value), the bracketed term will approachunity, so that, with but negligible error,
Zf(P)= z Ci. (4)
Equation (4) is the basic equation for the high-gaindirect-current feed-back amplifier, and is the justifica-tion for the term "operational" amplifier, as will beshown in the succeeding paragraphs.
It will be noted in Fig. 2 that the output voltage e2
is of opposite polarity from that of the input voltage el.Hence, if the impedances Zf(p) and Zi(p) are equal re-
sistances, the amplifier will perform the simple operationof sign-changing. In fact, sign-changing will be includedin all the operations which can be performed by theamplifier.
If the impedances of (4) are unequal resistances, a
scale change will be accomplished, for
e2 =-Ci. (5)
It will be noted that the accuracy of the scale changedepends only on the accuracy of the resistors, and doesnot depend on the amplifier components, so long as the
amplifier gain remains large for all frequencies of inter-est.
Often it is desired to vary the scale of a given input,or to make the output adjustable. Three methods ofaccomplishing this operation are shown in Fig. 3. Thecircuits are self-explanatory and all of them may beused interchangeably. It is to be noted that circuits (a)and (b) fully realize the low output impedances whichresult in degenerative feed-back amplifiers. On the otherhand, the output impedance of circuit (c) may reach avalue as high as one quarter the resistance of the outputpotentiometer. This output impedance may be impor-tant in producing computation errors if the circuit fol-lowing has a low impedance. In case (a) the gain varieslin'early with the resistance of resistor Rf; in case (c) theoutput voltage will be linear with change in resistor R0;but in case (b) the gain will vary as the reciprocal of theresistance Ri. These facts are of particular importancewhen the parameter is to be varied by a servomechanismwhose output angle is most readily made linearly varia-ble with the applied voltage.
(a)
8,
A(C)
Fig. 3-Three methods for obtaining variable changes in scale or gain.
The more important operations which can be per-formed by virtue of (4) are those of the calculus, whichmake sys'tems of these amplifiers capable of solvingdifferential equations. Thus, if Zf(p) is a capacitor whoseimpedance expressed operationally is 1/Cp, and Zi(p) isa resistance R, (4) becomes
(2 1 e1 (6)
This amplifier is now an integrator which can accuratelyintegrate input voltages with respect to time. It shouldbe noted that the multiplying factor 1/RC may be madeunity by choosing R as 1 megohm and C as 1 microfarad,and that the sign of the output voltage e2 is negative ascompared to the input voltage el. If the input voltageis constant, the output voltage will rise linearly withtime up to the limit of the amplifier. If the input voltageis removed, the output voltage e2 will remain constantat the integrated value. To remove this output voltageit is necessary to provide a switch which short-circuitsthe capacitor C, thus returning the output voltage tozero.
If Zf(p) is now made a resistance R, and Z,(p) is madea capacitor whose impedance is expressed operationally
1947 445

PROCEEDINGS OF THE I.R.E.
as l/Cp, (4) becomes
e2= (RC)pei. (7)The operational amplifier is now a differentiator whoseoutput is the derivative of the input voltage. If a volt-age of constantly increasing magnitude is applied to theinput of this differentiator, the output will be a con-stant value. One of the disadvantages of the differ-entiator is its very good high-frequency response. Forexample, if the voltage fed to the differentiator is pro-duced by a coarse potentiometer, the output voltagewill contain high-magnitude pulses produced by eachstep of the contact arm.Another basic operation which can be performed by
the operational amplifier is the important one of sum-ming the voltages obtained from any number of inde-pendent sources. A circuit to provide the summation of
LI ~b LI 40 e' Ae,~~~~~-
Fig. 4-Circuit for adding functions of three variables.
three input voltages is shown for illustration in Fig.it is assumed that the voltage ei' is virtually zerocurrent equation may be written in the same mann(was used to derive (4):
ia + ib + ic = i2.
So,
ea eb ec e2+ _+ =
Za(P) Zb(P) Zc(p) Zf(p)Rearranging,
Z,(p) 4f(p) 4f(p)e2= eP + ( eb+Z() eC.
Za(P) Zb(P) Zc(p)If all the impedances are equal resistances, (10) redto a summation of the three input voltages:
e2= ea + eb + ec.
This summation may be accomplished for any nurof input voltages.
It is evident that the summation may be made;braic (that is, may include subtractions) if the i]voltages are of proper sign, and they may be made sthe use of sign-changing amplifiers where required.easy to see that scale-changing may be made to acpany the summation if the resistances Ra, Rb, etc.not selected to equal Rf, but ratios of Rf/Ra, Rf/Rb,are chosen to give the desired individual multiplfactors. Furthermore, it is possible to use the gerequation (10) and perform calculus operations on
4. If, theer as
input voltages at the same time they are summed andaltered in magnitude. The only restriction is that theimpedance Zf(p) is common to all the operations in-volved.The operations described above may be summarized
and the process involved becomes generalized and cap-able of further extension if (4) is written in the form
F= (p)e2(t) = .el(t)
F2(P) (12)
or
Fl(p)ei(t) = F2(p)e2(t). (13)In this form, the equation may be used for the settingup of complicated systems, examples of which will bedescribed in the ensuing pages. The functions F1(p) andF2(p), as shown in Fig. 5, may be produced not only by
Fi,('o) e,
+
e, F,(pJ ez0Fela
Fig. 5-Generalized circuit for operational computation.
passive circuits consisting of impedances, but also withadditional operational amplifiers.
III. SYNTHESIS OF COMPUTERS FOR LINEARFIRST-DEGREE EQUATIONS
The techniques for setting up an electronic computerfor an equation of a physical system can be divided into
(8) two classes, which will be referred to as the "in-line"and 'current-junction" methods. One or a combinationof these methods will apply to a particular problem.
(9) Usually there are many possible circuit arrangements,one of which will be more convenient to synthesize, moreeconomical of equipment, or will permit easier adjust-ment of the desired parameters.
Before an equation is synthesized, it should be written(10) in a form such that the independent variable is time, and
the literal coefficients represent positive numerical val-luces ues. A simple differential equation which fulfills the
above conditions without rearrangement is that of the(11) mechanical dynamics of a d'Arsonval meter or oscillo-
graph element with constant rotational inertia J, vis-riber cous friction damping factor D, and stiffness factor K.
The relationship between the angular displacement 0(t)alge- and the applied torque r(t) is given by the familiar sec-nput ond-order equation :8;o byIt iscom-, areetc.,yingieralthe
d20 dOJ-+D-± KO =-r(t)dt2 dt
(14)
or
(Jp2 + Dp + K)O - r(t) = 0. (15)8 R. E. Doherty and E. G. Keller, 'Mathematics of Modern Engi-
neering," vol. I, p. 17, John Wiley and Sons, New York, N. Y., 1936.
446 May

Ragazzini, Randall, and Russell: Analysis of Problems in Dynamics by Electronic Circuits
This equation, which can, of course, be solved bystraightforward mathematical methods without re-course to a computer, will be used to illustrate thetwo techniques mentioned above.
(a) In-Line Technique
The in-line technique is adaptable to equations inwhich a number of functions of the independent variableare to be added to equal some function of the dependentvariable. For example, if it is desired to examine thephysical system of (15) in order to investigate the tran-sient torque required to produce a given angular dis-placement for various values of inertia, damping, andstiffness, a computer would be synthesized to solve (15)for i(t) in terms of 0(t).
Synthesis by means of the in-line technique consistssimply of feeding the independent variable as an inputvoltage into a series of operational amplifiers, each ofwhich computes one of the desired functions. Thesefunctions are then algebraically added in a final summa-tion amplifier to give the desired output or dependentvariable.
In the system of Fig. 6(a), an applied voltage propor-tional to the angular displacement from rest, 0(t), isfed into the left-hand terminals from a relatively low-impedance source. Amplifier A a. having unit input and
(a)
(b)Fig. 6-(a) Example illustrating 'in-line" technique of synthesis.
(b) Simplified computer for above example.
feed-back resistors (say, one megohm each) operates asan isolating unit and sign-changing amplifier, giving anoutput voltage proportional to -0. This voltage is dif-ferentiated and again changed in sign by amplifier Af,having a unit input capacitor and a unit feed-backresistor (say, one microfarad and one megohm, respec-
tively). Its output voltage is therefore proportional top0. Amplifiers A, and A d receive pO and produce volt-ages proportional to -pO and -p20, respectively, thelatter by means of another differentiation.Assuming initially that the constant positive coeffi-
cients J, D, and K are all to be adjusted to values be-tween zero and one, potentiometers of relatively lowimpedance (e.g., 50,000 ohms) can then be arranged asshown to deliver fractions of the voltages symbolized by-p20, -p0, and -0, respectively proportional to thecoefficients J, D, and K. These voltages are thensummed in amplifier Ae, using high-resistance input-circuit resistors (e.g., 10 megohms) so that the equiva-lent resistance from the potentiometer tap to groundwill cause a negligible addition to the input resistanceof amplifier A,,.
Suppose, however, that 1 <J< 10. Then the feed-backresistance of amplifier Ad could be made equal to tentimes the input resistance, so that the voltage outputwould be proportional to -lOp2.Economy of amnplifiers can be obtained with the cir-
cuit of Fig. 6(b). In this circuit the summing amplifierA, also differentiates -JpO, thus producing Jp20 with-out recourse to a separate differentiator and an addi-tional sign-changing amplifier. In cases such as thatdescribed above, the potentiometer resistance to groundmust be sufficiently low so that the real component ofthe capacitive input impedance will be negligible at thehighest frequency for which accuracy of response is de-sired.Many other circuit arrangements are possible, each
having its advantages and disadvantages. It should beemphasized that all of these computer systems are uni-directional; a voltage proportional to r(t) in the presentexample can not be applied to the terminals at the rightto obtain the angular displacement 0 as a voltage at theleft-hand terminals. If it is desired to obtain 0(t) as afunction of r(t), the technique of synthesis which fol-lows must be employed.
(b) Current-Junction Techntque
The second method by means of which computercircuits may be synthesized, which is referred to as the"current-junction" technique, is perhaps the most basicmethod of attacking the problem. It was demonstratedin (13) that any amplifier, including the summing ampli-fier, solves the general equation of the form
Fl(p)x - F2(p)y = 0 (16)
where F1 (p) is the operator for the independent variablex and F2(p) is the operator for the fed-back terms of thedependent variable y.
In the general case there may be several independentvariables x, x', x", etc., each with its own operator; andseveral different operators for the dependent variable yall of which are fed to the current junction o of Fig. 5.Thus tie general equation would be of the form
4471947
H./ R./ R-1

4PROCEEDINGS OF THE I.R.E.
FI(p)x + Fl'(p)x' + Fi"(p)x" + * - F2(p)y- F2'(p)y- F2"(p)y .- = 0 (17)
If the variables x, x', x", * * *, y are voltages suchas ei(t) and e2(t), then the various expressions F(p) areadmittances, and the synthesizing process consists ofsumming algebraically the currents flowing into thejunction o, of an amplifier such as that shown in Fig. 5,and setting the result equal to zero. The various currentsare mutually independent since the grid input terminalo is virtually at zero potential (since el' is negligiblysmall) and hence effectively grounded.The technique is illustrated in Fig. 7(a) for (15),
which is now to be solved for 0(t) in terms of r(t). Ampli-fier A. is first assumed to produce an output voltageequal to 0(t). In order that 0(t) may exist at this point,it is necessary to feed four currents (one for each term ofthe equation) to its grid input terminal, junction o, thussolving the equation
- r(t) + KO + Dpo + fp20 = 0.
(a)
(b)
Fig. 7-(a) Example illustrating "current-junction" technique ofsynthesis.
(b) Simplified computer for above example.
The current i4, representing the term of the independ-ent variable r(t), will exist if we let the input resistor bea unit value and apply a voltage proportional to -r(t)at the left-hand terminals. The second term is KO, ob-tained by feeding back the voltage proportional to 0
through a conductance proportional to K, or a resist-ance, R1 = 1/K. Thus a current i1(t) =KO will also flow atjunction o. Voltages proportional to pO and p20, neces-
sary to produce currents i2(t) and i8(t), are produced bythe in-line technique described previously. When thecurrents ii, i2, $3, i are applied to junction o, the outputof amplifier Aa must then be proportional to 0(t), asassumed at the start. The computer of the above ex-ample may be somewhat simplified, at the expense ofhaving resistor R2 dependent on two of the coefficients,J and D, as shown in Fig. 7(b).The choice of the computer system is sometimes de-
termined by the variations of the coefficients of theequations. If the coefficients such as J, D, and K aremerely adjustable but remain constant as inputs areapplied, practically any system is workable. However,occasionally a coefficient is not constant but a functionof either time or one of the variables of the system. Inthat case a circuit must be chosen so that the value ofthe coefficient is proportional to the angle of rotation ofa potentiometer shaft, so that a simple servo-driven unitmay be used.
IV. PROBLEMS INVOLVING SIMULTANEOUS EQUATIONS
Simultaneous integrodifferential equations arise whenproblems of coupled physical systems are encountered.Frequently it is inconvenient or impracticable to solvethese equations mathematically for the desired un-known, and then set up a computer for the resultingeouation. In addition, a solution may be desired for eachof the unknown quantities. In such cases it is convenientto synthesize a computer for each of the equations of theset, and then to interconnect the circuits in a mannersuch that the equations are satisfied simultaneously.The steps required for synthesis of a computer for
simultaneous linear equations may be tabulated as fol-lows:
(a) Each equation is written in a form such that oneof the dependent variables, with its coefficients, standsalone on the right-hand side of the equation, this de-pendent variable being different for each equation of theset.
(b) By one of the methods previously described aseparate computer is set up for each equation, assumingthat all the variables save the one on the right are inde-pendent variables, so that the computer will producean output voltage proportional to the dependent varia-ble on the right-hand side of the equation.
(c) Functions of the output of each computer re-quired to provide the proper input functions for theother computers are noted. Circuits are added to theoutput of each to provide these additional output func-tions.
(d) The heretofore-separate systems are cross-con-nected so that each input terminal receives its propervoltage from one of the outputs of the system. Only theinput terminals for the true independent variable orvariables will then be left free,' and to these externaldriving functions will be applied, as in the cases dis-cussed previously.
448 May

Ragazzini, Randall, and Russell: Analysis of Problems in Dynamics by Electronic Circuits
(e) Scales of computation are adjusted so that eachamplifier will have a voltage output of reasonable mag-nitude.As an example consider the airplane shown in Fig. 8,
for which it is desired to make a study of the pitchingcharacteristics when the elevators are manipulated. Apair of axes fixed in the airplane will be used as refer-ences, with the customary positive directions as shown.
Fig. 8-Diagram illustrating notation for equations (19),(20), (21), and (22).
At the instant illustrated the airplane is pointing at anegative angle 0 from the horizontal, and is moving witha resultant linear velocity V in a direction at an attackarfgle A from the longitudinal axis. The velocity V isconsidered to have two rectilinear components, V.and V.
It is desired to synthesize a computer-which will solvefor the disturbances or changes in angular velocity wand the disturbances or changes in the linear velocitiesv. and v, caused by small moments M. applied to theairplane by means of the elevators. The airplane is as-sumed to have a mass m and moment of inertia J aboutthe y axis, perpendicular to the plane of the paper.
Let it be assumed that initially (at t= 0) the airplaneis flying with velocities and angular positions indicatedby upper-case symbols with the subscript o. Then equa-tions for the changes or disturbances in linear and angu-lar velocities (indicated by lower-case symbols) can bewritten for the symmetrical motions of the airplane.Three equations of motion are required, which are:9
(1) The sum of the x-directed forces equals zero;Ef,=0.
(2) The sum of the z-directed forces equals zero;Ef= 0.
(3) The sum of the angular moments about the centerof gravity and the y axis equals zero;EM= 0.With certain approximations,9 these three equationscan be written in the following form:
(p + k=X)v, + Vo(sin Ao)w + g(cos 60) -= kX,v, (19)p
- (p + kZZ)vZ + VO(COS Ao)coco
- k, ww+ g(- sin 0o) - k.,v3 (20)p
X W. F. Durand 'Aeronautic Theory," vol. 5, division N, by B.Melvill Jones, chap. 5, J. Springer, Berlin, 1934-1936.
- (kMap + kMi)vz + kMxvx + - = (p + km.)wJ
(21)
where V., A, and 0, are respectively the initial resultantvelocity, attack angle, and angle from the horizontal(chosen negative); v,, v,, and co are the increments indownward, forward, and angular velocities, respectively,for which solutions are desired; and the coefficients (allarranged so as to be numerically positive) are:
1 afxkx = - O
m Ov.1 af
kxz = -
m Ov,
k=-= Of-m Ow
1 OMkM,---
J clv,1 OM
kM., = - -J Ow
1 Ofzkzz = -
m av,1 afz
kzx = -
m avx
1 aMkMi = - -
I Oiz(22)
1 OMkM - --
J Ov.
g = gravitational constant.
(The symbol i, represents the downward acceleration.)The equations as written above are in the form re-
quired for synthesis of the computer, and this processcan now be carried out as outlined. Three separate com-puters are planned, one for each of the three equations,arranged to solve for the variable on the right-hand side.
Fig. 9-Electronic computer for symmetric motions of airplane.
In Fig. 9, the output of amplifier A, is chosen to be-y; the feed-back network is chosen so as to multiplyby the coefficient k,5. Similarly, amplifiers Ab and A,produce -v. and--w, respectively; the feed-back net-works provide for multiplication by k,, and (p+kMcw),respectively. The required inputs are then assumed tobe available, and input impedances are selected so thatthese inputs will be multiplied by the proper coefficients.
1947 449

PROCEEDINGS OF THE I.R.E.
It will be noted that, with the chosen feed-back im-pedances, it is possible to use capacitors to differentiatebut not to integrate input terms. For this reason, it isnecessary to assume as inputs the integrated quantities,such as wlp, where such are required. It is also con-venient to assume that the multiplication by V0 is tobe taken care of elsewhere, so that V0w is available foran input. It is now evident that the inputs requiredinclude, in addition to the three outputs -v., -v,, and=-, the quantities v-,, wop, and Vw. Amplifiers Ad, A,and Af are added to the circuits in order to produce theseterms.The next step consists of interconnecting the three
computers so that correspondingly labeled input andoutput terminals are connected; these wires are nots4own on the diagram. When these connections are com-plete, the only input terminal left free is that of the inde-pendent variable Me, the applied elevator moment. Thismoment may be assumed proportional to rudder angle,and may therefore be an input obtained from a po-tentiometer supplied with a direct voltage and at-tached to the elevator control operated by the "pilot"of the simulated airplane, or by an automatic pilotwhich it is desired to study.There are, of course, further practical considerations,
which have not been mentioned. Stabilization of eachloop of the computer circuit must be accomplished, aproblem to be discussed later. Scales must be adjustedso that the output voltages of the v. and w computerswill be of the same order of magnitude as that of thev. computer.
V. EQUATIONS WITH NONCONSTANT COEFFICIENTSAND OF HIGHER DEGREE
In the analysis of some systems, the equations may beof higher degree and, in additioti, some of the coeffi-cients may be functions either of time or of some of thevariables. In view of the fact that the quantities in-volved are usually voltages, simple servomultiplier anddivider circuits will be described.
Fig. 10-Servomultiplier circuit.
As shown in Fig. 10, the servomechanism, being a de-generative device, causes the error voltage e, to bebrought to zero. The angle 0 at which the servomecha-nism just closes its error is given by the relation
eT e2
R2 R1(23)
and
er= (-2E = E002
(24)
where 0 is the shaft rotation and 20. is the total anglesubtended by the follow-up potentiometer P1. Solvingfor the shaft rotation,
0= (-ia)(-)v e2. (25)
To produce multiplication with the second voltage e1, asecond potentiometer P2, is supplied on one side withthe voltage el directly, and on the other side with thevoltage el through a sign changer. The shaft of this po-tentiometer is connected to that of the servomechanism,so that its output is
(26)eO =00
ot
substituting the value of 0 from (25),
= R2)eo = tEeje2.
By proper choice of R2, R1, and E, a scale factor for themultiplication may be produced to specifications. Thecapacitor C2 is merely for stabilization of the servosys-
tem and does not enter in the computation, except duringtransient conditions.
*-N%%%%V-~~ ~ ~Se COv
41Y19
T-
Fig. 11-Servodivider circuit.
In a similar manner, it is possible to divide one volt-age by another using a servodriven potentiometer. Aschematic circuit of this system is shown in Fig. 11. Theservosystem closes the error voltage eE to zero, so that
el 20e2R1 26oR2
Solving for the shaft rotation 0,
(R20f )ea= _
R1, e2
(28)
(29)
(27)
MaY450

Ragazzini, Randall, and Russell: Analysis of Problems in Dynamics by Electronic Circuits
The output voltage e. is obtained from a potentiometeron the same shaft supplied with +E volts to ground.Thus,
(2E\ ER2\eleO= 2f 0 = R)*(30)Ri /e2
It is observed that the output voltage eO is the quotientof ei and e2 multiplied by a scale factor. Thus it is possi-ble to multiply or divide a term in any equation by an-other term with any suitable scale constant by use ofthese small servodriven potentiometers.
Frequently it is desired to insert a function of a givenvariable in the computer system. For instance, if a studyof aerodynamic systems is made in which a coefficientis a function of wind velocity, it is possible to adapt oneof the servodriven systems to perform this operation.One technique is to construct a servomechanism similarto the multiplier of Fig. 10, and to drive a cam throughan angle 0 proportional to an independent variable e2.The desired function may be cut on a cam which d-rivesanother linear potentiometer whose output voltage isthe function of the independent variable. The same re-sult may be obtained without a cam by winding a po-tentiometer whose voltage output is the desired functionof shaft angle.
For instance, referring to the electronic computer forthe symmetric motions of an airplane in Fig. 9, thequantity V. is the initial airspeed which is constant. Theterm VOw produced by amplifier Af is used in the com-puter for inputs which, for more accurate computations,should use the magnitude of the instantaneous velocityV, the vector value of which is given by the equation
V-=VO + v (31)
where v is the change in velocity from the initial value v..To make this correction in the computer, it would benecessary to vary the feed-back resistor Rig by means ofa servodriven potentiometer whose shaft rotation isproportional to I VI.
Inputs to the computer can also be obtained by man-ual curve tracing. If a function of the independent varia-ble is plotted and the plot rotated by means of the servo-motor, the curve can be manually followed and the volt-age output from a potentiometer used in the system.Such methods have been used in differential analyzersin the past and can be used in electronic computers aswell.
Practical physical problems offer numerous examplesof system variables which have fixed upper limits. Forexample, an angle specifying the position of a boat rud-der may vary between zero and a fixed maximum. Simi-lar limits apply to airplane controls. A mechanical sys-tem involving spring forces will often involve maximumspring extensions.The purely mathematical solution of the dynamics of
such systems where such limiting action occurs is oftendifficult. The electronic representation of such limits is
comparatively simple and can be introduced into thesystem wherever the limits occur. Fig. 12 shows one suchcircuit. Whenever the input voltage ei exceeds the biasvoltage E, one or the other diode will conduct, depend-ing on the polarity of el. When this occurs the outputvoltage will be limited closely equal to the bias voltage,provided the resistance R is high compared to the dioderesistance. A limiter of this type may be inserted in thecomputers previously described wherever needed.
Fig. 12-Circuit for introducing nonlinearity in form of limits.
VI. OPERATING CONSIDERATIONSThe frequency response of any operational amplifier
may be obtained by replacing the operator p by thequantity jw. Thus the frequency response of an integra-tor is given by
E / 1\R 1
El RC jw(32)
This expression indicates a gain characteristic whichdrops 6 decibels per octave. On the other hand, the fre-quency response of a differentiator is given by
E2- - (RC)jw,
(33)which indicates a gain characteristic that rises l decibelsper octave.These frequency characteristics may be used as a con-
venient test of amplifier accuracy in producing a givenoperation. For instance, if the gain curve of a differ-entiator indicates a linearly rising gain of 6 decibelsper octave up to a given frequency, but beyond this fre-quency shows considerable deviation from linearity, itmay be concluded that as a differentiator it is correctup to this particular frequency. If voltages containingfrequency components of higher value are applied at theinput, error in differentiation will result. Extending thefrequency response of the base amplifier will correct thesituation.Without further explanation, it is evident that by
proper choice of Zf(p) and Zj(p) many operational ex-pressions may be set up accurately. The accuracy whichwill result depends on the maintenance of the high val-ues of gain A, regardless of the rate of change or fre-quency component content of the input functions. Afrequency range of from zero (direct current) to thehighest frequency at which accurate computation is de-sired must be maintained in the amplifiers. In addition,the accuracy of the external circuit constants used mustbe assured.
For the impedance functions Zf(p) and Zj(p), capaci-tors and resistors are generally used. It is evident that,
1947 451

PROCEEDINGS OF THE I.R.E.
while theoretically usable, inductances are avoided,since at the relatively low frequencies involved it isdifficult to obtain as pure or accurate an impedancefunction as can be obtained with a capacitor of low lossand low retentivity.*Whever the computer involves the use of capacitors
other than small ones inserted to achieve stability, con-siderable difficulty may be found due to retentivity ofcharge. It has been recommended by the Bell TelephoneLaboratories that capacitors with polystyrene dielec-tric be used, as they are relatively free of this effect.A perfect representation of the equation for a stable
mechanical system should, of course, be stable electri-
response are, of course, attenuated as a result. In somecases it may be necessary to choose a new time scale10 inwhich these attenuated high frequencies are well abovethe upper frequencies of response of the dynamical sys-tem being simulated.While the amplifier units described earlier are reason-
ably drift free, residual drifts may often be annoying,particularly where small input voltages and long timeintervals are involved. These effects can be readilyminimized by changing the voltage scale and the timescale so that the useful voltages are large compared tothe drift voltages and so that the experimental "run"is completed before errors have had time to accumulate.
Fig. 13-Typical laboratory electronic-computer arrangement. One set of amplifiers in the lower bay onthe left is the computer described in Fig. 9 for aircraft symmetrical motions.
cally. Unavoidable progressive phase shifts, both withinindividual amplifier units and appearing accumulativelywhen several units are connected in a loop, may lead tooscillation at some upper frequency. A careful redesignof the complete system will often minimize the numberof separate amplifiers used in any single loop so that os-cillation does not occur. The nature of the system itselfwhich is being represented will often automatically sta-bilize the electronic equivalent, as, for ihstance, when amechanical system having large mass will act as a low-pass filter, eliminating from the feed-back loop thosehigher frequencies for which phase shift may occur.The individual amplifiers may exhibit instability
when the over-all gain of the amplifier is too high. Thiscondition may be overcome by inserting a small capaci-tor across the feed-back impedance of differentiatorsand scale changers, or by inserting a resistor in serieswith the capacitor of an integrator, thereby limiting thefrequency response. The higher harmonics in the system
Drift and stability for these systems are functions of thedirect-current power supply, which should be extremelywell regulated and of low dynamic output impedance.A typical laboratory electronic-computer arrange-
ment is shown in Fig. 13.
VII. ACKNOWLEDGMENT
The authors wish to express their appreciation to Sec-tion 7.2 of the National Defense Research Council, itschief, S. H. Caldwell, and the technical aides of thatSection, G. A. Philbrick, J. B. Russell, and H. C. Wolfe,for their assistance, co-operation, and guidance in carry-ing out this work at Columbia University under con-tract number OEMsr-237. In addition, the authorswish to acknowledge the contributions of L. Julie andM. Hestenes to some phases of this development.
10 J. L. Gardner and M. F. Barnes, "Transients in Linear Sys-tem,"nvol. 1, p. 226; John Wiley and Sons, New York, N. Y., 1942.
452 May