
Incorporating copying mechanism in sequene to sequence learning

AN INTERMITTENT MOTION MECHANISM INCORPORATINGA GENEVA WHEEL AND A GEAR TRAIN
David B. Dooner1, Antonio Palermo2 and Domenico Mundo21Department of Mechanical Engineering, University of Puerto Rico, Mayagüez, Puerto Rico
2Department of Mechanical, Energy, and Management Engineering, University of Calabria, ItalyE-mail: [email protected]
Received August 2013, Accepted June 2014No. 13-CSME-151, E.I.C. Accession 3609
ABSTRACTThis paper presents a kinematic study of a mechanism incorporating a Geneva wheel and a gear train toachieve intermittent motion. The goal of this mechanism is to eliminate the acceleration jump at the begin-ning and end of the Geneva wheel motion. An epitrochoidal path replaces the circular path for the drivingpin in a classical Geneva wheel drive. The epitrochoidal path is generated using a gear train and results inzero velocity, acceleration, and jerk at the beginning and end of the Geneva wheel motion. Presented is acomparison of the position, velocity, acceleration, and jerk between the classical Geneva wheel mechanismand the proposed mechanism. Subsequently, the motion of the Geneva wheel is modified by introducing anon-circular gear pair to adjust the timing of the epitrochoidal path. The motion of the non-circular gear pairis determined by reducing the extreme jerk of the Geneva wheel.
Keywords: Geneva wheel; planar path generation; epitrochoid; non-circular gears.
INCORPORATION D’UNE ROUE DE MALTE ET D’UN TRAIN D’ENGRENAGE DANS UNMÉCANISME À MOUVEMENT INTERMITTENT
RÉSUMÉCet article présente une étude cinématique d’un mécanisme incorporant une roue de Malte et un train d’en-grenage pour obtenir un mouvement intermittent. Le but d’un tel mécanisme est d’éliminer au début et à lafin les sauts brusques d’accélération de mouvement de la roue de Malte. La trajectoire épitrochoïde remplacela trajectoire circulaire pour l’axe de commande dans un mécanisme classique de roue d’entraînement deMalte. La trajectoire épitrochoïde est générée par l’utilisation d’un train d’engrenage ; le résultat est nullevitesse, nulle accélération et saut au début et à la fin du mouvement de la roue de Malte. On présente unecomparaison de la position, de la vitesse, de l’accélération, et de saut en début et en fin pour la roue deMalte classique, et le mécanisme proposé. Par la suite, le mouvement de la roue de Malte est modifié enintroduisant un engrenage non circulaire pour l’ajustement de la trajectoire épitrochoïde. Le mouvement del’engrenage non circulaire est déterminé en réduisant le saut extrême de la roue de Malte.
Mots-clés : roue de Malte; planification planaire de trajectoire; épitrochoïde; engrenage non circulaire.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 359

1. BACKGROUND
One task of a mechanical designer is to synthesize a mechanism that achieves a particular task. Synthesisprocedures are usually classified as either function generation, path generation, or motion generation. Cams,gears, and linkages can be combined where a point on one of the links traces a general planar curve. Planarpath generation can be central to the kinematic design of a Geneva wheel mechanism. The available literaturedocumenting mechanism synthesis for planar path generation is enormous. An introduction to mechanismdesign is provided by Erdman and Sandor [1], Waldron and Kinzel [2], and Uicker et al. [3].
A 4-bar mechanism is a basic 1-dof (degree of freedom) mechanism. A 4-bar is created by selectingfour link lengths and joining the links with revolute joints to form a loop. A wide variety of paths arepossible by arbitrarily choosing a point on the coupler curve. These different curves can be obtained byconstructing a physical model of the mechanism and viewing the path of various points without detailedmathematical analysis (e.g. see [4]). It is also possible to develop a mathematical model of the mechanismin terms of its four link lengths. The analytical expressions for these paths are algebraic and require manycomputations to determine the coordinates for points on the path. Handbooks were developed to cataloguemany curve forms, their instantaneous properties, and the corresponding mechanism used to produce them.Burmester [5] developed a procedure to determine the link lengths of a 4-bar mechanism that will guideits coupler curve in a prescribed manner. The mathematical formulation of this procedure for designing a4-bar mechanism is referred to as Burmester theory. Freudenstein introduced the use of a computer for thedesign of 4-bar mechanisms [6]. This activity precipitated much interest in creating additional analyticalapproaches to specify mechanisms capable of satisfying a desired task. Much of the work fostered byFreudenstein is highlighted by Erdman [7]. The methodology developed by Freudenstein and Sandor [8]for path generation consists of specifying a finite number of points (precision points) on the desired curveand results in a 4-bar mechanism where a point on the coupler curve passes through the specified precisionpoints. Interestingly, the number of points is usually three, four or five. This methodology of path generationis referred to as an exact method.
One problem with designing a 4-bar mechanism for path generation is that the final 4-bar mechanismis rarely able to produce the desired path. For this reason, optimal synthesis methods were used to designmechanisms for path generation. The objective is to minimize the structural error defined as the differencebetween a prescribed path and the generated path [9–11]. An optimal mechanism is synthesized by summingthe difference between these paths over the full operative domain and changing the mechanism parametersto reduce this net difference. One disadvantage of the exact method is that only a few precision points can beused whereas one disadvantage of optimal methods is that an approximation to the desired task exists. Thesedisadvantages can be eliminated by integrating higher order pairs (viz., cams, gears, and pin-in-slots) withlinkages. In 1967, Hain [12] cited the existence of cam-linkage mechanisms, while in 1981 Singh and Kohli[13] used the complex loop closure method and the envelope theory to define a general approach for thesynthesis of combined cam-linkage systems for exact path generation. In 2006, Mundo et al. [14] proposeda method for the optimal synthesis of planar mechanisms where a combination of cams and linkages areused to obtain precise path generation.
Task performing mechanisms can also be obtained by integrating linkages with geared-bodies. Roth andFreudenstein [15] proposed a numerical method for the synthesis of a geared five-bar mechanism (GFBM)for path generation tasks defined by nine precision points. Zhang et al. [16] proposed an algorithm forthe optimal synthesis of a symmetric GFBM as a path generating mechanism. Starns and Flugrad [17]used continuation methods to synthesize a GFBM for a path generation task defined by seven precisionpositions. Nokleby and Podhorodesky [18] proposed a method for the optimal synthesis of GFBM based ona quasi-Newton optimization routine.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014360

Recently, a combination of linkages with non-circular gears was proposed for different purposes, suchas balancing shaking moments in spatial linkages [19], reducing speed and torque fluctuations in rotatingshafts [20], reducing the driving torque fluctuations in GFBMs [21], synthesizing path-generating mecha-nisms with time-prescription [22]. Mundo et al. [23, 24] proposed the integration of five-bar linkages withnon-circular gears to synthesize a mechanism capable of precisely moving a coupler point along a desiredpath, while a non-circular gear pair is designed in [25] to drive a ball-screw mechanism according to anoptimal law of motion. Presented are different gear trains incorporating circular and non-circular gears asdriving mechanisms for a classical Geneva wheel. The goal is to achieve intermittent motion with improvedkinematic behavior.
2. GENEVA WHEEL
Intermittent drives are used in industry for counting mechanisms, indexing, sequencing, motion-picturemechanisms, feed mechanisms, and watches, although less common today with programmable controllers.A Geneva wheel is an example of an intermittent motion mechanism. Typically, the Geneva wheel is drivenby a pin that traverses a circular path; this is the classical Geneva wheel mechanism. The path of the pin willvary later. One undesirable feature of the classical Geneva wheel mechanism is that an acceleration jumpexists at the start and stop of the Geneva wheel motion. Several mechanisms have been proposed to reduceand eliminate this acceleration jump. Hunt [26] proposed a 4-link crank-rocker to generate a coupler curveto eliminate these acceleration jumps. Dijksman [27] presented more complex mechanisms to eliminate theacceleration jump at the onset of Geneva wheel motion. Later, Sujan and Meggiolaro [28] used a 4-barmechanism for improving Geneva wheel dynamics. None of the proposed mechanisms are as compact asthe classical Geneva wheel drive. Further, balancing these mechanisms becomes a challenge where Genevawheels driven by linkages are not common.
Fenton et al. [29] proposed curved slots along with a slot offset to improve the motion characteristics ofthe Geneva wheel. Figliolini and Angeles [30] presented an algorithm on the synthesis of Geneva wheeldrives with curved slots using a specified motion. More recently, Lee and Jan [31] expanded this conceptwith focus on undercutting. Quaglia et al. [32] introduced counter rotating geared wheels that engage anddisengage with an output wheel to generate an oscillating motion in the output wheel. The output wheel isheld stationary using slots akin to the Geneva wheel. Acceleration spikes at engagement and disengagementare eliminated by using specially shaped slots. Figliolini et al. [33] eliminated the sliding motion inherentbetween the pin and slot using cams. Hasty and Potts [34] consider wear and maximum contact stressfor a classical drive Geneva wheel mechanism. These same considerations can be extended today usingupdated design formulations for wear and stress along with optimizations procedures. Recent applicationsincorporating a Geneva wheel mechanism include the design of a shoulder joint [35] and an insect likeflapping wing mechanism [36].
A classical 4-slotted Geneva wheel mechanism is illustrated in Fig. 1.1 Typically, mechanical designerswill incorporate a circular wheel with a pin as shown in Fig. 1. The rotation of the Geneva wheel is preventedwhen the pin is not in the slot using the locking cam illustrated in Fig. 1. Referencing Fig. 1, the followingrelation is obtained via the law of sines:
Rsinφ
=L
sin[π− (φ +θ)](1)
where for n slots−π/n < φ < π/n
1The Geneva drive is also referred to as a Maltese cross mechanism.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 361

Fig. 1. Classical Geneva wheel mechanism with circular wheel drive.
Note that the angle φ spans the open interval (−π/n,π/n). Solving for the angular position φ of the Genevawheel in terms of the Cartesian coordinates (xp, yp) of the pin yields2
φ = tan−1(
yp
L+ xp
)(2)
Expressing the angle θ in terms of the coordinates (xp, yp) gives
θ = π− tan−1(
yp
xp
)(3)
3. PATH GENERATION
The motion of the classical Geneva wheel mechanism is based on the circular path of the driving pin. TheCartesian coordinates (xp, yp) of the pin are expressed
xp = Rcosvi
yp = Rsinvi
where R is the radius of the pin and vi is the angular position of the input wheel. The Geneva wheelmotion can be altered by utilizing a path other than a circular pin path. An alternative path can be producedusing a gear pair where the input gear is held stationary and the connecting link is allowed to rotate [24,37]. Illustrated in Fig. 2 are two non-circular gears where the “input” non-circular gear (centrode) is heldstationary and the output non-circular gear (centrode) is moving. The point p in the output gear traces aplanar path. The output centrode rotates without slip along the input centrode. Depicted in Fig. 3 is a specialcase where the gears are circular. The motion of the point q embedded in the moving output gear describesan epitrochoid. One special case is when the distance rd is equal to the gear radius where the resulting pathis an epicycloid. When the input gear and the output gear are of equal diameters, there exists one cusp andthe epicycloid is defined as a cardioid. When two cusps exist (i.e., diameter of the fixed gear is twice thediameter of the moving gear), the epicycloid is defined as a nephroid.
The goal is to determine a suitable pin path for driving the Geneva wheel and subsequently determine thecorresponding non-circular gear pair. A suitable pin path is one that yields smooth and continuous velocity
2Implicit is tan−1(a/b) is a quadrant arctangent function where the sign of both the numerator a and the denominator b determinethe angle φ .
362 Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014

Fig. 2. A point p traces a planar path (xp, yp) using non-circular output gear (moving NC output gear) rotating withoutslip relative to the fixed input gear.
and acceleration of the Geneva wheel. The driving pin path determines the non-circular gear shapes and thenon-circular gear shapes define the pin path. Thus, the relation between the instantaneous gear ratio and thepin path is presented. Subsequently, zero acceleration of the Geneva wheel is defined in terms of the drivingpin path and its derivatives.
The Cartesian coordinates (xp, yp) for a general planar path are
xp = E cosvi− rd cos(vi + vo) (4a)
yp = E sinvi− rdsin(vi + vo) (4b)
where E is the connecting link center distance between the two gears, rd is the distance of the drivingpin p from the center of the moving gear, vi is the angular position of the connecting link and vo is thecorresponding angular position of the output gear. The path tangency is defined using the angle β (seeFig. 2) where
β = tan−1(
y′
x′
)(5)
Using a Geneva wheel with n slots, tan(π/n) = tanβ at initial engagement. For example, β = 240◦ forn = 3, β = 225◦ for n = 4, and β = 210◦ for n = 6. The angle vi that satisfies this relation provides an initialvalue to determine the instantaneous gear ratio g and the derivative g′ (g′ ≡ dg/dvi). Zero acceleration isensured when
ddvi
tanβ = 0 (6)
This occurs whenx′′y′ = y′′x′ (7)
Differentiating Eq. (4) givesx′p =−E sinvi + rdsin(vi + vo)(1+g) (8a)
y′p = E cosvi− rdcos(vi + vo)(1+g) (8b)
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 363

Fig. 3. An epitrochoid traced by the point (xp, yp) on a circle (moving output gear) rotating without slip.
where g≡ dvo/dvi is defined as the instantaneous gear ratio. Differentiating the above gives
x′′p =−E cosvi + rdcos(vi + vo)(1+g)2 + rdsin(vi + vo)g′ (9a)
y′′p =−E sinvi + rdsin(vi + vo)(1+g)2− rdcos(vi + vo)g′ (9b)
Candidate driving pin paths (xp, yp) are expressed in terms of the instantaneous gear ratio g. Subsequently,g is expressed using a Fourier series with N terms as follows:
g(vi) = 1+N
∑n=1
[ansin(nvi)+bncos(nvi)] (10)
where the coefficients an and bn (n = 1, . . . ,N) are unknown variables to be determined. g is an “even”function in this case due to the symmetry of the Geneva wheel drive. The “evenness” enables the “odd”terms (viz., the sine terms) in the Fourier series to be ignored. Each function g is evaluated using thefollowing integral relation:
I(g) =2π∫0
(1−g)2 dvi (11)
g = 1 = constant for circular gears. One of the N terms in the Fourier series together with vi are used to sat-isfy Eqs. (5) and (7) simultaneously. The remaining N−1 terms are optimized to minimize Eq. (11) yieldinggears as circular as possible. This procedure was implemented and multiple solutions were obtained. How-ever, a feasible solution with acceptable non-circular gears (e.g., both gear elements remain convex) using a1:1 net speed reduction was not obtained. One unacceptable solution is provided in Fig. 4.
A suitable driving pin path can be generated using circular gears. In this case, the instantaneous gear ratiog is constant for circular gears and g′ = 0. Depicted in Fig. 5 is an epitrochoidal path where the diameter ofthe input gear is three times bigger than the diameter of the moving gear. Also presented is a Geneva wheelwith 6 slots (i.e., n = 6). Substituting Eqs. (8–9) into Eq. (7) yields a relation for the radial distance rd . For
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014364

Fig. 4. A non-circular gear pair based on Eq. (10).
Fig. 5. Special epitrochoid with three inflections.
the special case where the fixed input gear is three times bigger than the output gear, the radial distance rdthat ensures an inflection is (vo = gvi for circular gears)
rd =−B±
√B2−4AC
2A(12)
whereA = (1+g)3
B = (1+g)(2+g)cos(gvi)E
C = E2
For n = 6, the gear ratio g = 3, vi = 120◦, and rd = −E/16. Additional combinations of n, g, and rp existwhich satisfy Eq. (7).
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 365

Fig. 6. Angular position of Geneva wheel using a circular pin path drive and an epitrochoidal pin path drive.
4. MOTION COMPARISON
Figure 6 shows the functional relation between the angular position φ (Eq. 2) of the Geneva wheel versusthe angular position vi of the input wheel for the classical case where the driving pin path is circular. Alsoshown is the angular position φ of the Geneva wheel versus the angular position vi of the connecting linkfor the case where the driving pin path is epitrochoidal. A third motion case involving a variable speeddrive is presented that will be used in the next section. An evaluation of the Geneva wheel motion for thecircular pin path drive and the epitrochoidal pin path drive is extended by comparing the kinematic velocity,acceleration, and jerk as presented in Figs. 7, 8, and 9 respectively. The angular position vi is valid on theopen interval (120◦, 240◦) and Figs. 6, 7, and 8 do not consider the endpoints. This is especially importantin Fig. 8 where a jerk spike exists at the endpoints for the circular path drive curve.
5. MOTION MODIFICATION
The Geneva wheel motion in the previous section is based on a uniform speed of the input wheel. Onemethod for modifying the Geneva wheel motion is to use a variable speed input wheel. This is the conceptproposed by Heidari et al. [38] to the classical Geneva wheel drive. Heidari et al. reduced both the extremeacceleration and jerk, yet did not eliminate the acceleration spike at the engagement/disengagement of thedriving pin with the Geneva wheel. A variable speed input can be applied to both the circular pin path driveand the epitrochoidal pin path drive. Non-circular gears are used to drive the pin along an epitrochoidal pathand reduce the extreme values in kinematic jerk of the Geneva wheel.
The Geneva wheel motion that minimizes the magnitude of the kinematic jerk depicted in Fig. 9 is sought.In turn, the Geneva wheel motion depends on the motion of the non-circular gear pair. This coupling ofmotions is balanced through the following objectives:
• zero velocity at engagement/disengagement of driving pin with Geneva wheel;
• zero acceleration at engagement/disengagement of driving pin with Geneva wheel;
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014366
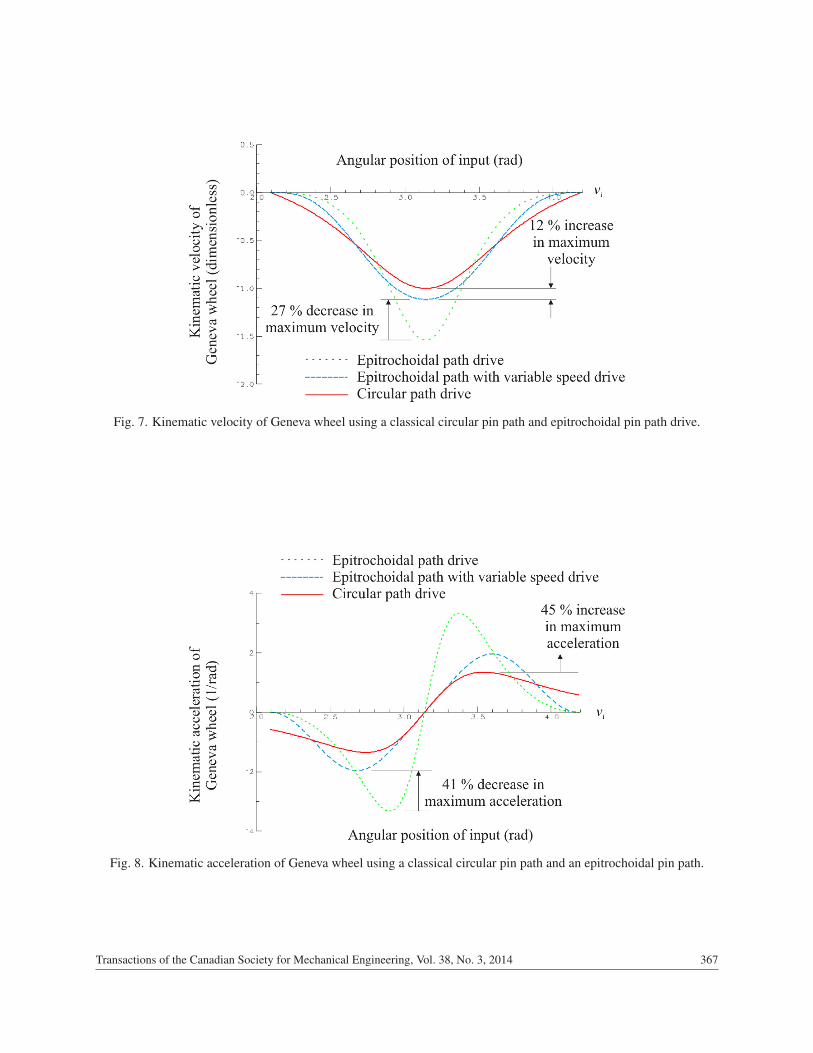
Fig. 7. Kinematic velocity of Geneva wheel using a classical circular pin path and epitrochoidal pin path drive.
Fig. 8. Kinematic acceleration of Geneva wheel using a classical circular pin path and an epitrochoidal pin path.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 367

Fig. 9. Kinematic jerk of Geneva wheel using a classical circular pin path drive and an epitrochoidal pin path drive.
Fig. 10. Non-circular gear pair for epitrochoid drive with single reduction.
• zero jerk at engagement/disengagement of driving pin with Geneva wheel;
• continuous and smooth velocity of non-circular gear pair;
• continuous and smooth acceleration of non-circular gear pair;
• continuous and smooth jerk of non-circular gear pair.
One approach is to synthesize the non-circular gears that minimize the extreme values in kinematic jerk. Asecond approach is to specify the motion of the non-circular gears and analyze the motion of the Genevawheel. A dilemma of the first approach is that the non-circular gears that optimize the Geneva wheel motionmay exhibit unacceptable dynamic characteristics. A third approach for modifying the Geneva wheel motioninvolves the use of non-circular gears in place of the 3:1 ratio circular gear pair. The second approach isused in two scenarios below.
One scenario is to use a non-circular gear pair to directly drive the arm of the gear train. The non-circulargear pair necessary to make this transformation is depicted in Fig. 10. The non-circular gear pair shown isnot practical.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014368

Fig. 11. Gearbox for generating a variable speed drive for the epitrochoidal pin path drive.
Fig. 12. Motion characteristics of non-circular gear pair.
Another scenario is to introduce a 3:1 gear reduction between the non-circular gear pair and the gear trainas illustrated in Fig. 11. The constant speed input must be “three” times greater than the earlier cases tocompensate for the 3:1 reduction. The kinematic velocity motion for the non-circular gear is assumed to be
g(vi) = 1+Asinvi. (13)
The amplitude A is determined iteratively and interactively. A value of A is specified where velocity, ac-celeration, and jerk are displayed. The final value A = 0.275 is selected based on a qualitative balancebetween maximum acceleration and maximum jerk. The position, velocity, acceleration, and jerk for thevariable speed epitrochoidal pin path is depicted in Figs. 6–9 along with the values for the classical Genevawheel and the constant speed epitrochoid. The reduction in maximum velocity, acceleration, and jerk arepresented in Figs. 7–9. The motion characteristics for the non-circular gear pair are shown in Fig. 12 andthe corresponding non-circular gear pair is depicted in Fig. 13. The non-circular gears are practical (convex)and hence a 3D view is shown. The non-circular gear pair of Fig. 13 are the NC gear pair in Fig. 11 and thevariable speed output drives the connecting link of the epitrochoidal driving pin path.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 369

Fig. 13. Non-circular gear pair for variable speed drive to epitrochoidal pin path.
6. CONCLUSIONS
A Geneva wheel mechanism with zero velocity, acceleration, and zero jerk at the beginning and end ofthe Geneva wheel motion is presented. This mechanism consists of a 6-slotted Geneva wheel driven withan epitrochoidal path. The epitrochoidal path is generated using a gear pair with a 3:1 speed ratio. TheGeneva wheel motion is compared to the classical Geneva wheel driven by a circular driving pin path.Subsequently the epitrochoidal path drive is modified using a variable speed drive. This variable speedmotion is generated using a non-circular gear pair along with a 3:1 gear reduction. The resulting mechanismyields a Geneva wheel with the same extreme jerk that the classical Geneva wheel while eliminating theacceleration discontinuity at engagement/disengagement of the Geneva wheel with the driven pin. Themaximum velocity and acceleration of the presented Geneva wheel mechanism are increased by 12 and 45%respectively over the classical Geneva wheel drive. Conversely, the maximum velocity, acceleration, and jerkof the epitrochoidal pin path drive are reduced by 27, 41, and 77% using a variable speed drive. Presentedare the non-circular gear motion and the corresponding non-circular gears that produce the variable speedmotion.
REFERENCES
1. Erdman, A.G. and Sandor, G.N., Mechanism Design, Vol. 1, Analysis and Synthesis, Prentice-Hall, EnglewoodCliffs, NJ, 1991.
2. Waldron, K.J. and Kinzel, G.L., Kinematics, Dynamics, and Design of Machinery (2nd ed.), John Wiley andSons, New York, 2004.
3. Uicker, J.J. Jr., Pennock, G. and Shigley, J.E., Theory of Machines and Mechanisms, Oxford University Press,2003.
4. Hrones, J.A. and Nelson,G.L., Analysis of the Four-Bar Linkage, The Technology Press of MIT and J. Wiley andSons, New York, 1951.
5. Burmester, L., Kinematic Handbook, A. Felix, Leipzig, 1888 [in German].6. Freudenstein, F., “An analytical approach to the design of four-link mechanisms”, Transactions of the ASME,
Vol. 76, pp. 483–492, 1954.7. Erdman, A., Modern Kinematics, Wiley Series on Design Engineering, John Wiley and Sons, New York, 1993.8. Freudenstein, F. and Sandor, G.N., “Synthesis of path-generating mechanisms by means of programmed digital
computer”, Journal of Engineering for Industry, Vol. 81B, No. 2, pp. 159–168, May 1959.9. Angeles, J., Alivizatos, A. and Akhras, R., “An unconstrained nonlinear least-square method of optimization of
RRRR planar path generators”, Mechanisms and Machine Theory, Vol. 23, No. 5, pp. 343–353, 1988.10. Gabrera, J.A., Simon, A. and Prado, M., “Optimal synthesis of mechanisms with genetic algorithms”, Mecha-
nisms and Machine Theory, Vol. 37, pp. 1165–1177, 2000.11. Laribi, M.A., Mlika, A., Romdhane, L. and Zeghloul, S., “A combined genetic algorithm-fuzzy logic method
(GA-FL) in mechanism synthesis”, Mechanisms and Machine Theory, Vol. 39, pp. 717–735, 2004.12. Hain, K., Applied Kinematics, McGraw-Hill, New York, 1967.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014370

13. Singh, Y.P. and Kohli, D., “Synthesis of cam-link mechanisms for exact path generation”, Mechanisms andMachine Theory, Vol. 16, No. 4, pp. 447–457, 1981.
14. Mundo, D., Liu, J.Y. and Yan, H.S., “Optimal synthesis of cam-linkage mechanisms for precise path generation”,Trans. ASME J. Mech. Des., Vol. 128, No. 6, pp. 1253–1260, 2006.
15. Roth, B. and Freudenstein, F., “Synthesis of path-generating mechanisms by numerical methods”, Trans. ASMEJ. Eng. Ind., Vol. 30, pp. 298–305, 1963.
16. Zhang, C., Norton, R.L. and Hammonds, T., “Optimization of parameters for specified path generation using anatlas of coupler curves of geared five-bar linkages,” Mechanisms and Machine Theory, Vol. 19, pp. 459–466,1984.
17. Starns, G. and Flugrad, D.R., “Five-bar path generation synthesis by continuation methods”, ASME Journal ofMechanical Design, Vol. 115, pp. 988–994, 1993.
18. Nokleby, S.B. and Podhorodesky, R.P., “Optimization-based synthesis of Grashof geared five-bar mechanisms”,ASME Journal of Mechanical Design, Vol. 123, pp. 529–534, 2001.
19. Han, J.Y., “Complete balancing of the shaking moment in spatial linkages by adding planar noncircular gears”,Arch. Appl. Mech., Vol. 67, pp. 44–49, 1997.
20. Dooner, D.B., “Use of noncircular gears to reduce torque and speed fluctuations in rotating shafts”, Trans. ASMEJ. Mech. Des.. Vol. 119, pp. 299–306, 1997.
21. Yao, Y.A. and Yan, H.S., “A new method for torque balancing of planar linkages using non-circular gears”, Proc.Inst. Mech. Eng. Part C, Vol. 217, pp. 495–503, 2003.
22. Liu, J.Y., Chang, S.L. and Mundo, D., “Study on the use of a non-circular gear train for the generation of Figure-8 patterns”, Proceedings of the Institution of Mechanical Engineers, Part C, Journal of Mechanical EngineeringScience, Vol. 220, No. 8, pp. 1229–1236, 2006.
23. Mundo, D., Gatti, G. and Dooner, D.B., “Optimized five-bar linkage with non-circular gears for exact pathgeneration”, Mechanism and Machine Theory, Vol. 44, pp. 751–760, 2009.
24. Mundo, D. and Gatti, G., “A graphical-analytical technique for the synthesis of non-circular gears in path-generating geared five-bar mechanism”, Transactions of the Canadian Society for Mechanical Engineering,Vol. 32, Nos. 3–4, pp. 487–497, 2008.
25. Mundo, D. and Yan, H.S., “Kinematic optimization of ball-screw transmission mechanisms”, Mechanism andMachine Theory, Vol. 42, pp. 34–47, 2006.
26. Hunt, K.H., The Kinematic Geometry of Mechanisms, Clarendon Press, Oxford, 1978.27. Dijksman, E.A., “Jerk-free Geneva wheel driving”, Journal of Mechanisms, Vol. 1, pp. 235–283, 1966.28. Sujan, V.A. and Meggiolaro, M.A., “Dynamic optimization of Geneva mechanisms”, in Proceedings of the
International Conference on Gearing, Transmissions and Mechanical Systems, Daizhong Su (Ed.), NottinghamTrent University, UK, 3–6 July, Professional Engineering Publishing, London, pp. 687–696, 2000.
29. Fenton, R.G., Zhang, Y. and Xu, J., “Development of a new Geneva mechanism with improved kinematic char-acteristics”, ASME Journal of Mechanical Design, Vol. 113, No. 1, pp. 40–55, 1991.
30. Figliolini, G. and Angeles, J., “Synthesis of conjugate Geneva mechanisms with curved slots”, Mechanism andMachine Theory, Vol. 37, pp. 1043–1061, 2002.
31. Jyh-Jone Lee and Bin-Heng Jan, “Design of Geneva mechanisms with curved slots for non-cutting manufactur-ing”, Mechanism and Machine Theory, Vol. 44, No. 6, pp. 1192–1200, 2009.
32. Quaglia, G., Maffiodo, D. and Pescarmona, F., “A novel continuous alternate motion mechanism with two inputwheels”, Journal of Mechanical Design, Vol. 129, pp. 858–864, August 2007.
33. Figliolini, G., Rea, P. and Angeles, J., “The pure-rolling cam equivalent of the Geneva mechanism”, Mechanismand Machine Theory, Vol. 41, pp. 1320–1335, 2006.
34. Hasty, C.E. and Potts, J.F., “Analysis and synthesis procedures for Geneva mechanism design”, IBM Journal,pp. 186–197, May 1966.
35. Papadopoulos, E. and Patsianis, G., “Design of an exoskeleton mechanism for the shoulder joint”, in Proceedingsof 12th World Congress on the Theory of Machines and Mechanisms, Besancon, France, June 18–21, 2007.
36. Zbikowski, R., Galinski, C. and Pedersen, C.B., “Four-bar linkage mechanism for insect like flapping wings inhover: Concept and an outline of its realization”, Journal of Mechanical Design, Vol. 127, pp. 817–824, July2005.
37. Dooner, D.B., “Path generation using non-circular gears”, in Proceedings of the 8th National Conference onMachines and Mechanisms, IIT Kanpur, India, pp. A39–A45, 1997.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014 371

38. Heidari, M., Zahiri, M. and Zohoor, H., “Optimization of kinematic characteristic of Geneva mechanism bygenetic algorithm”, Proceedings of World Academy of Science, Engineering and Technology, Vol. 34, October2008.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 38, No. 3, 2014372


















