
An automatic wave equation migration velocity analysis by differential semblance optimization
25
An automatic wave equation migration velocity analysis by differential semblance optimization The Rice Inversion Project
-
Upload
leigh-duffy -
Category
Documents
-
view
34 -
download
1
description
An automatic wave equation migration velocity analysis by differential semblance optimization. The Rice Inversion Project. Objective. Simultaneous optimization for velocity and image Shot-record wave-equation migration. Theory. Nonlinear Local Optimization Objective function - PowerPoint PPT Presentation
Transcript of An automatic wave equation migration velocity analysis by differential semblance optimization

An automatic wave equation migration velocity analysis by
differential semblance optimization
The Rice Inversion Project

Objective
• Simultaneous optimization for velocity and image
• Shot-record wave-equation migration.

Theory
• Nonlinear Local Optimization
– Objective function
– Gradient of the objective function
• Remark: – Objective function requires to be smooth .
– Differential semblance objective function is smooth.
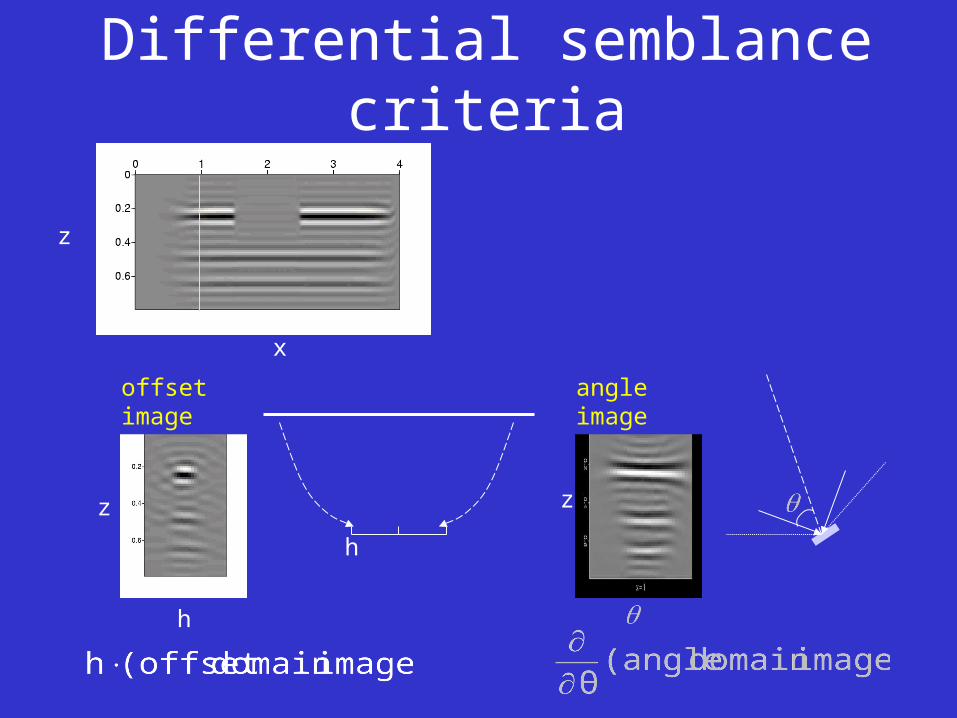
Differential semblance criteria
offset image
z
x
z z
angle image
h
h

Objective function
I : offset domain image
c : velocity
h : offset parameter
P : differential semblance operator
|| ||: L2 norm
M : set of smooth velocity functions


Gradient calculation
derivative cross correlate*
cross correlate reference field
cross correlate
R0S0
image
DS* DR*
gradient
down down
up up
S*z R*
z
Downward continuation and upward continuationDefinitions:
SZ RZ

Gradient smoothing using spline evaluation
Vimage I
gimage
migration
differential migration*
spline
spline*
Vmodel
gmodel
M : set of smooth velocity functions

Optimization
• Objective function evaluation
• Gradient calculation
BFGS algorithm for nonlinear iteration
• Update search direction
loop
cout Iout

Synthetic Examples
• Flat reflector, constant velocity
• Marmousi data set

Experiment of flat reflector at constant velocity
x
z Ccorrect = 2km/sec

Initial iterate:
Image (v0 = 1.8km/sec)
Image space: 401 by 80
Model space: 4 by 4
Offset image Angle image

Offset image Angle image
Iteration 5:
Image

Iterations
v5: Output velocity at
iteration 5
vbest - v5

Marmousi data set

Marmousi data set

V

Offset image Angle image
Initial iterate:
Image (v0=1.8km/sec)
Image space: 921 by 60
Model space: 6 by 6

Iterate 5:
Image
Offset image Angle image

v5: output velocity at iteration 5
vbest: best spline interpolated velocity
v5 - vbest
iterations

Low velocity lense + constant velocity background
Vbackground = 2 km/sec

Shot gathers far away from the low velocity lense
Shot gathers near the low velocity lense
Seismogram

Iteration 1
Iteration 2
Iteration 3
Iteration 4
Start with v0 = 2km/sec

1.0 1.5 2.0 2.5 3.0

• Offset domain DSO is a good substitute for angle domain DSO.
• Image domain gradient needs to be properly smoothed. • DSO is sensitive to the quality of the image.
• Differential semblance optimization by wave equation migration is promising.
Conclusions







![Seismic velocity structure in the Earth’s outer core · [1] We constrain seismic velocity structure in the Earth’s outer core by analyzing differential travel times, waveforms,](https://static.fdocuments.in/doc/165x107/5d3335b388c993d91a8c79b8/seismic-velocity-structure-in-the-earths-outer-1-we-constrain-seismic-velocity.jpg)









