An Agenda for Sensorimotor Research in Sub-Orbital … · An Agenda for Sensorimotor Research in...
192
An Agenda for Sensorimotor Research in Sub-Orbital Flight 1 Faisal Karmali, Harvard/MEEI Mark Shelhamer, Johns Hopkins Supported by: NSBRI, NIH, NSERC (Canada) Special thanks: Ondrej Juhasz, Michelle Zwernemann, John Yaniec, Noel Skinner and our research subjects
Transcript of An Agenda for Sensorimotor Research in Sub-Orbital … · An Agenda for Sensorimotor Research in...

An Agenda for Sensorimotor Research in Sub-Orbital Flight
1
Faisal Karmali, Harvard/MEEIMark Shelhamer, Johns Hopkins
Supported by: NSBRI, NIH, NSERC (Canada)
Special thanks: Ondrej Juhasz, Michelle Zwernemann, John Yaniec, Noel Skinner and our research subjects

2
How can we: Make sub-orbital flight more safe? Make sub-orbital flight more enjoyable? Benefit humans on Earth through
sub-orbital flight experiments?

Sensorimotor disruptions
3
AutonomicMotion Sickness
Orthostatic intolerance
Eye movements
Vestibulo-ocular reflexPitch
Roll
Eye alignmentTorsional
VerticalNystagmus
Saccade accuracy
Postural stabilityGait
Head-body-eye coordination
Motor coordination Manual joystick control
Orientation illusions Inversion illusion

Goals
4
Sub-orbital passengers
Sub-orbital pilots
• Maximize enjoyment (maximize corporate revenue via customer referrals)
• Accomplish research tasks
• Safely pilot the aircraft during both nominal and emergency situationsWithout interference from sensorimotor disruption

Overcoming sensorimotor disruptions
5
Strategies
Adaptation
Re-adaptation
Pre-adaptation
Pharmaceutical
Cognitive training
Orbital flight
Sub-orbital passengers
Sub-orbital pilots
***** * *
** * *****
*** ***** **
*** *** **
***** ***** ***

How quickly do we adapt?
6Experienced Pilots Day 1 Early Day 1 Late Day 3
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Naive
Diff
eren
ce b
etw
een
0 g
and
1.8
g in
pitc
h ve
stib
uloo
cula
r ref
lex
gain
(deg
/deg
)

Recommendations
7
Operators ResearchersUse pre-adaptation in parabolic flight for sub-orbital passengers
Emphasize recency of experience for sub-orbital pilots
Develop and conduct a neurological examination for sub-orbital pilots
Consider screening of passengers for latent and undiagnosed neurovestibular problems before sub-orbital flight
Study the effectiveness of parabolic flight as a tool to pre-adapt sub-orbital passengers
Find sensorimotor symptoms caused by the unique sub-orbital flight trajectory, and ways to mitigate them
Study the correlation between sensorimotor disruption and pilot performance and appropriate countermeasures.

8

Adaptation
Adaptation Seconds - Days
9

Research Goals
10
Sub-orbital passengers Sub-orbital pilots
• Allow passengers to fully focus on the flight experience without distraction of sensorimotor disruption
• Allow passengers to complete a set of personal tasks within a short period of time, such as movement in 0 g, flips, looking out the window, and interacting with other passengers
• Allow scientist-passengers to complete scientific tasks quickly and accurately
• Consider any interactions between flight phases specific to sub-orbital flight
• Ensure that sensorimotor disruption does not interfere with the ability to pilot the aircraft during both nominal and emergency situations
• Quantify re-adaptation capability by study the effect of gaps in sub-orbital exposure on functional neurological tests and actual flight performance metrics

11
Adaptation of otolith-ocular responses to parabolic flight
Presented by:Faisal KarmaliResearch FellowJVPL / MEEI / HMS
October 14, 2008
Supported by: NSBRI, NIH, NSERC (Canada)
Faisal Karmali, Ondrej Juhasz, Michelle Zwernemann, Mark Shelhamer

12
Take-home points In parabolic flight, certain otolith-dependent ocular
responses improve over the course of 3 days of flying
Pilots (non-parabolic) had similar responses to experienced parabolic fliers, suggesting that certain experiences can prepare one for parabolic flight
Adaptation of otolith-dependent pitch responses transfers to otolith-dependent translation responses

13Experienced Day 1 Day 2 Day 3
0
0.5
1
1.5
2
2.5In
stab
ility
of to
rsio
nal a
lignm
ent (
deg)
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.

14None Single episode vomiting Severe vomiting
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Motion sickness score
Inst
abilit
y of
tors
iona
l alig
nmen
t (de
g)
Naive subjects (n=6)Pilots subjects (n=3)Experienced subjects (n=4)

15
Day 1
0 g 1 g 1.8 g0.5
0.6
0.7
0.8
0.9
1
1.1
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)
0 g 1 g 1.8 g0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)Experienced parabolic flyers (n=4)
Day 3

16
Take-home points In parabolic flight, certain otolith-dependent
neurological responses improve over the course of 3 days of flying
Pilots (non-parabolic) had similar responses to experienced parabolic fliers, suggesting that certain experiences can prepare one for parabolic flight
Adaptation of otolith-dependent pitch responses transfers to otolith-dependent translation responses

17
Measuring static eye position• OCR• Torsional alignment• Vertical alignment
• Nikon D70 digital camera
• Subjects’ head upright/ tilted

18
Measuring pitch VOR gain Active sine-like head
movements • 0.3-1.6 Hz. Results
based on 0.6-1.3 Hz• 20-30º• 40-90º/sec
Fixating stationary point in the light.
Eye movements were recorded using a head-mounted video system (Chronos).
Gain computed by least-squares fitting of eye velocity to head velocity, for each cycle of motion.

19

20
Adventures in weightlessness:
Adaptation of otolith-dependent ocular responses to parabolic flight
Presented by:Faisal KarmaliResearch FellowJVPL / MEEI / HMS
MEEI Vestibular SeminarMarch 24, 2008
Faisal Karmali, Ondrej Juhasz, Michelle Zwernemann, Mark Shelhamer

21

22

23

24
The bottom line…1. Parabolic flight consists of specific flight trajectories
that provide periods of 0 g and 1.8 g.
2. Subjects experience sensorimotor disruption when initially exposed to parabolic flight, specifically in the pitch vestibuloocular reflex and torsional alignment.
3. Over the course of three days in parabolic flight, responses became appropriate in 0 g, 1 g and 1.8 g.
4. Responses in 1 g were not affected by adaptation in 0 g and 1.8 g, suggesting context-specific adaptation (rather than generalized sensory rearrangement)

25
Outline Background: Parabolic flight Background: Science Methods: Recording eye position Results
Conclusions

26
BackgroundParabolic Flight

27Mercury astronauts training aboard a C-131B (1959)

28
Play movie: C:\Faisal\kc-135\Skew\KC135_March2002_Day3_MarkFaisal.avi
Play movie:C:\Faisal\kc-135\Pictures\Aug2006\walkingupsidedown.mov

29
Start of 0 gPitch 45º nose-up
24000 feet(7300 m)
34000 feet (10000 m)
0 g
1.8 g 1.8 g
End of 0 gPitch 45º nose-down
g = gia = gravitoinertial acceleration ⇒ the occupants’perceptions
of gravity

30
Play movie:c:\Faisal\kc-135\Pictures\Apr2006\HPIM2161.MPG

31
It is not zero gravity! In parabolic flight, the plane accelerates downwards to
match gravity, so the net force is zero. Even in orbit, there is still gravity (~9.37 m/s2 at 300 km)
freefall weightlessness microgravity zero gravityzero ggravitoinertial acceleration (gia)
Preferred terms Less correct

32
KC135 Photo

33
Why doesn’t everybody fall to the front of the plane?
Wz
WWx
Nz
Nx
Vertical (z)axis
Longitudinal (x) axis
θ
degreesKarmali F, Shelhamer M. The dynamics of parabolic flight: flight characteristics and passenger percepts. Acta Astronautica (In press)

34
0
0.5
1
1.5
2
Ver
tical
g le
vel (
g)
Aircraft g level (gravito-inertial acceleration) during two parabolas (aircraft coordinates)
0
0.5
1
Long
itudi
nal
g le
vel (
g)
0
0.5
1
Late
ral
g le
vel (
g)
0 20 40 60 80 100 120 140 160 180
Alti
tude
Time (seconds)
350 KT IAS, Mach 0.83510 KT TAS, 24000 ft
225 KT IAS, Mach 0.61360 KT TAS, 45º nose upMAX UPWARD VELOCITY
140 KT IAS, Mach 0.43245 KT TAS, 34000 ftBELOW UNACCELERATED STALL SPEED

35
Rotational dynamics The aircraft is rotating through 90º every 30 seconds
Our paper claims these are “barely at the threshold of detection” of the semicircular canals!
Angular velocity of 3 º/s
Centripetal acceleration of 0.006 g
Angular acceleration of 2 º/s2 during transitions between 0 g and 1.8 g
Tangential acceleration of 0.07 g
Karmali F, Shelhamer M. The dynamics of parabolic flight: flight characteristics and passenger percepts. Acta Astronautica (In press)

36
Otolith stimulation

37
Why they call it the “Vomit Comet” Approximately 40-60% of participants get sick on their first
flight. The next day, most are fine.
A sensorimotor rearrangement has occurred. This learning is retained for months.
We want to improve our understanding of these adaptive processes.
Studied a range of sensorimotor responses at different neural levels: brainstem through to perceptual • based on design MVL Spacelab experiments

38
Background

39
Vestibular-Ocular Reflexes
Otolith organs measure linear acceleration and gravity (contains utricle and saccule)
Semicircular canals (SCC) measure angular velocity
Eye movements opposite of head movements
Conjugate: eyes move together
Disconjugate: difference between left and right eyes
VOR gain=Eye velocity / head velocity

40
Eye misalignments occur in parabolic flight and whole-body pitch rotation – otolith implicated (Markham, Diamond, Karmali)
Ocular counterroll is reduced after space flight (Clarke 2000,
Moore 2003, Vogel 1986).
Pitch VOR still exists when canals deactivated (Angelaki)
Otolith-dependent misalignments can be adapted with static head positioning using a visual-vestibular mismatch (Schor)
Eye movements and otolith organs

41
Hypotheses1. Context-specific adaptation: learning a set of
specific responses that is calibrated for each g level.• Example: initially inappropriate otolith-driven responses, which
eventually become appropriate (correctly calibrated) in each g level.
2. Generalized adaptation: learning a set of general responses, each of which is simultaneously appropriate for multiple g levels.• Example: gradual decrease in otolith-driven responses, reflecting
overall lack of reliability of otolith information as g level varies.

42
Methods

43
Experimental design Three consecutive days of flying per subject Responses tested:
• Pre-parabolas• Early• Late• Post-parabolas
14 subjects: 5 experienced, 6 naïve, 3 pilots Measurements:
• torsional alignment • ocular counterroll• vertical alignment • pitch VOR gain – active & passive• Also tried linear VOR, SVV, SPV
No medication for motion sickness

44
Experimental designDay 1 Day 2 Day 3
Pre-parabolas Pre-parabolas Pre-parabolas
Early (first 10 parabolas)
Early (first 10 parabolas)
Early (first 10 parabolas)
Late (last 10 parabolas)
Late (last 10 parabolas)
Late (last 10 parabolas)
Post-parabolas Post-parabolas Post-parabolas

45
Measuring pitch VOR gain Active sine-like head
movements • 0.3-1.6 Hz. Results
based on 0.6-1.3 Hz• 20-30º• 40-90º/sec
Fixating stationary point in the light.
Eye movements were recorded using a head-mounted video system (Chronos).
Gain computed by least-squares fitting of eye velocity to head velocity, for each cycle of motion.

46
Measuring static eye position• OCR• Torsional alignment• Vertical alignment
• Nikon D70 digital camera
• Subjects’ head upright/ tilted

47
Results Torsional alignment instability Ocular counterroll (response to head tilt) Active pitch VOR

48Experienced Day 1 Day 2 Day 3
0
0.5
1
1.5
2
2.5In
stab
ility
of to
rsio
nal a
lignm
ent (
deg)
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.
Naïve Subjects(n=5)
Pilot Subjects(n=3)
Experiencedparabolicflyers(n=4)
Naïve subjects had significantly differentresults compared to both pilots and experienced subjects on day 1 (p<0.04),but not subsequent days.

49None Single episode vomiting Severe vomiting
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Motion sickness score
Inst
abilit
y of
tors
iona
l alig
nmen
t (de
g)
Naive subjects (n=6)Pilots subjects (n=3)Experienced subjects (n=4)

500 g 1 g 1.8 g
-8
-6
-4
-2
0
2
g level
Con
juga
te to
rsio
nal e
ye p
ositi
on(+
CW
; deg
rees
)
Naive subjects (n=6)Pilots subjects (n=3)Experienced subjects (n=4)

51
10 15 20 25 30 35 40 45 50 55 60-20
-15
-10
-5
0
5
10
15
20
25
10 15 20 25 30 35 40 45 50 55 60
0.6
0.8
1
1.2
10 15 20 25 30 35 40 45 50 55 600
0.5
1
1.5
2
Eye
& h
ead
posi
tion
VOR G
ain
g le
vel 1.8 g 0 g

520 g 1 g 1.8 g
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)Experienced parabolic flyers (n=4)
Day 1 Early

530 g 1 g 1.8 g
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)Day 1
Late

54
Day 3
0 g 1 g 1.8 g0.5
0.6
0.7
0.8
0.9
1
1.1
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)Day 3

55
Conclusions All responses showed a g-level dependence early in flight,
which decreased with experience.
Rate of adaptation varied between reflexes: torsional disconjugacy is fastest, then pitch VOR, then ocular counterroll.
• Torsional alignment instability rapidly reduced upon exposure to parabolic flight, and adaptation is retained between flights. The relatively rapid adaptation may be because errors in torsional alignment have greater functional offsets than conjugate changes in torsional eye position and changes in the pitch VOR.
• Pitch VOR gain initially dropped in 0 g and increased in 1.8 g, consistent with an otolith contribution. Difference between g levels decreased with experience and eventually disappeared, showing that the different otolith contributions in the different g levels are correctly processed after adaptation.
• Ocular counterroll is initially larger in 1.8 g and smaller in 0 g. Differences between g levels do not change within 3 days, although pilots show more appropriate responses in 1 g. An explanation for this slow adaptation may be that a well-tuned OCR gain is not critical; it is not compensatory in normal circumstances.
• None of the mechanisms show a change in response to 1 g after exposure to parabolic flight. This suggests that adaptation is context specific.
Upon adaptation, torsion, torsional alignment and pitch VOR are correctly calibrated in each g level, supporting the hypothesis of a context-specific adaptation of each response.

56

57
Acknowledgements
Advisor: Dr. Mark Shelhamer Undergraduate researchers: Ondrej Juhasz, Michelle
Zwernemann, Anton Aboukhalil Technical assistance: Adrian Lasker, Dale Roberts,
Dr. Andy Clarke NASA staff: Noel Skinner, John Yaniec Scientific advise: Dr. Mark Walker, Dr. Howard Ying,
SPH Biostats Clinic Moral support: Zee lab, friends & family Funding: NSBRI, NIH, NSERC

58
Compare t-test significance of day 1 vs day 3 naïve
Change bar graphs to std err instead of std
Review adapt. Spaceflight See MJS PPT Inc cool videos ~45 slides

59

60

61

62

63
Otolith ambiguity – same sensor transduces tilt and translation of head Transduced signal during tilt differs dramatically in weightlessness / high g environments, and changes in
otolith-dependent reflexes occur Designing a countermeasure to speed adaptation or pre-adapt reflexes could reduce adverse problems during
space missions, return to Earth or visiting other celestial bodies Characterizing the adaptive characteristics of otolith-dependent reflexes and the relationship between
adaptation of translation and tilt important for the design of countermeasures To learn more about these pathways, we studied the vestibulo-ocular reflex Specifically interested in the pitch VOR, because this is the most common type of head movement in which
the otolith organs transduce a changing direction of gravity During pitch head movements, three (or more) sensory signals available: otolith-transduced head position;
SCC-transduced head velocity; eye position Goals:
• to adapt VOR and show that adaptation is otolith-organ dependent• Show that adaptation of VOR transfers from tilt to translation• Characterize how the brain processes otolith organ information using the characteristics of the transfer of
adaptation With pitch head movements, during translation and tilt, the compensatory eye movement is vertical. Makes it
impossible to distinguish adaptation that is dependent on eye- vs. head- motion-dependent adaptation. Using vertical eye misalignment allows dependency on velocity and position to be better discriminated.
Methods• How to adapt VOR / eye misalignment?
Results / Discussion Conclusions
• The evidence that Cartesian components of the g vector are used as adaptive cues is important because it suggests that countermeasures on Earth can adapt some responses without changing the magnitude of the g vector. That means adaptation of otolith-dependent reflexes could occur in a 1 g field, which allows longer, cheaper adaptation sessions than jet or parabolic flight.

64
Transfer of oculomotor adaptation between otolith-dependent tilt and translation reflexes
Faisal KarmaliPost-doctoral fellowJVPL / MEEI / HMS
MVL, MITNovember 14, 2007

65
The bottom line…1. A vertical misalignment between the eyes can be
adapted that is dependent on otolith-transduced head tilt during pitch head rotation using a visual-vestibular mismatch
2. Modification of the response to otolith-transduced head tilt also modifies the response to vertical translation
3. Modeling shows that for adaptation, the brain processes the g vector as Cartesian components, rather than in polar coordinates

66
Background

67
Vestibular-Ocular Reflexes
Otolith organs measure linear acceleration and gravity (contains utricle and saccule)
Semicircular canals (SCC) measure angular velocity
Eye movements opposite of head movements
Conjugate: eyes move together
Disconjugate: difference between left and right eyes
VOR gain=Eye velocity / head velocity

68
Eye misalignments occur in parabolic flight and whole-body pitch rotation – otolith implicated (Markham, Diamond, Karmali)
Amount of misalignment decreases with experience in parabolic flight – shows adaptation of pathway occurs
Pitch VOR gain changes with g level – otolith implicated
Pitch VOR still exists when canals deactivated (Angelaki)
Otolith-dependent misalignments can be adapted with static head positioning using a visual-vestibular mismatch (Schor)
Eye movements and otolith organs

69
Previous studies of transfer between translation and rotation Yaw adaptation affects interaural translation
response (Koizuka et al.)
Interaural adaptation affects yaw response (Koizuka et al.)
Yaw adaptation affects response to constant-velocity pitch rotation (Petropoulos, Wall III, Oman)
These studies suggest adaptation of a pathway common to the SCC and otolith reflexes
In contrast, we find adaptation specific to the otolith pathway

70
0 g 1 g 1.8 g0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
g level
Gai
n of
pitc
h ve
stib
uloo
cula
r ref
lex
(deg
/deg
; ide
al g
ain
is 1
.0)
Naive subjects (n=3)Pilot subjects (n=2)Experienced parabolic flyers (n=4)
0 g 1 g 1.8 gg level
Naive subjects (n=3)Pilot subjects (n=2)
Day 1, early Day 1, late
Pitch VOR gain is dependent on g level in parabolic flight

71
Experimental Design

72
Aims1. Show that a misalignment between the eyes can be
adapted that it dependent on otolith-transduced tilt during dynamic pitch rotation using a visual-vestibular mismatch
2. Determine if modification of the response to otolith-transduced head tilt also modifies the response to vertical translation
3. Develop a model to understand how the brain processes otolith information during adaptation of otolith-ocular responses

73
Motion profiles
0 20 40 60 80 100 120-4
-2
0
2
4
Act
ive
pitc
h ro
tatio
n
0 20 40 60 80 100 120-4
-2
0
2
4
Ver
tical
sle
d tra
nsla
tion
Time (seconds)

74
Motion profileSensory receptor
Active pitch rotation Vertical translation
Otolith organs
Changing orientation relative to gravity
Linear acceleration
Semicircular canals (SCC)
Yes No
Orbital eye position
Yes Yes
Collic (neck) reflex
Yes No
Sensory environment during motion profiles

75
Motion profileSensory receptor
Passive pitch rotation (full body)
Active pitch rotation Vertical translation
Otolith organs Changing orientation relative to gravity
Changing orientation relative to gravity
Linear acceleration
Semicircular canals (SCC)
Only before vestibular time constant exceeded
Yes No
Orbital eye position
Yes, due to counterpitch response
Yes Yes
Collic (neck) reflex
No Yes No
Cognitive intent No Yes NoCognitive anticipation
Some situations Yes Yes
Sensory environment during motion profiles

76
Pre-test Pitch(monocular targets)
Adapt Pitch(20 min)
Post-test Pitch (monocular targets)
Pre-test Vertical (monocular target)
Pre-test Pitch (monocular target)
Adapt Pitch(15 min)
Post-test Pitch (monocular target)
Adapt Pitch(5 min)
Post-test vertical(monocular target)
The pitch plasticity study
The vertical translate study
Study procedures

77
Scleral contact lens coils Coil frame in a cube that consists of
three orthogonal magnetic fields oscillating at different frequencies
Coil acts as antenna that picks up a linear combination of the three that depends on its orientation
Accuracy <0.01º Wire is fragile, and often breaks Small coil frame used on vertical sled – data for pitch
not usable during the vertical translate study

78
Generalized Estimating Equations
t-test is often used to compare time-series data in two different conditions
t-test assumes independence between measures, which is not usually the case with rapidly-changing, sampled data such as eye position
GEE is a more correct and stringent technique that takes into account the correlation of the data with itself
t-test will sometimes indicate significance when GEE does not
Zeger, S. L. & Liang, K. Y. (1986). Longitudinal data analysis for discrete and continuous outcomes. Biometrics 42, 121-130.Karmali, Ramat, Shelhamer (2006). Journal of Vestibular Research 16:117-125.

79
Goal: understand the nature of central compensation Study the ability of the brain to learn an otolith organ-dependent
misalignment during dynamic head movements Subject performs active pitch rotation Induced a vertical misalignment of the eye by presenting a
visual disparity between the left and right eyes Subject wears red-blue glasses Real-time head position is fed to laptop which projects a field of
dots onto a screen The dots have a vertical disparity between left and right eyes Regular & eye-head dissociation paradigms
Pitch plasticity study

80
Pitch plasticity study
95 100 105 110 115 120
-20
0
20
40
Hea
d po
sitio
n(d
egre
es; +
up)
95 100 105 110 115 120
-40
-20
0
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
up) Right eye
Left eye
95 100 105 110 115 120-1
0
1
2
3
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
95 100 105 110 115 120
-0.1-0.05
00.050.1
Mis
alig
nmen
t gai
n
Time (seconds)
1645 1650 1655 1660 1665 1670
-20
0
20
40
Hea
d po
sitio
n(d
egre
es; +
up)
1645 1650 1655 1660 1665 1670
-40
-20
0
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
up)
1645 1650 1655 1660 1665 1670-1
0
1
2
3
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
1645 1650 1655 1660 1665 1670
-0.1-0.05
00.050.1
Mis
alig
nmen
t gai
n
Time (seconds)
Pre-adaptation Post-adaptation

81-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject J)
Verti
cal m
isal
ignm
ent (
degr
ees;
righ
t-lef
t; +
up)
Head position (degrees; + up)
Pre-adaptation
Post-adaptation

82
-50 0 50-4
-2
0
2
4Subject HSubject HSubject HSubject HSubject HSubject H
Standard paradigm
-50 0 50-4
-2
0
2
4Subject HSubject HSubject HSubject HSubject HSubject H
-50 0 50-4
-2
0
2
4Subject H*Subject H*Subject H*Subject H*Subject H*Subject H*
Eye-head dissociation paradigm
-50 0 50-4
-2
0
2
4Subject H*Subject H*Subject H*Subject H*Subject H*Subject H*
-50 0 50-4
-2
0
2
4Subject JSubject JSubject JSubject JSubject JSubject J
-50 0 50-4
-2
0
2
4Subject JSubject JSubject JSubject JSubject JSubject J
-50 0 50-4
-2
0
2
4Subject J*Subject J*Subject J*Subject J*Subject J*Subject J*
-50 0 50-4
-2
0
2
4Subject J*Subject J*Subject J*Subject J*Subject J*Subject J*
-50 0 50-4
-2
0
2
4Subject LSubject LSubject LSubject LSubject LSubject L
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
-50 0 50-4
-2
0
2
4Subject LSubject LSubject LSubject LSubject LSubject L
-50 0 50-4
-2
0
2
4Subject M*Subject M*Subject M*Subject M*Subject M*Subject M*
-50 0 50-4
-2
0
2
4Subject M*Subject M*Subject M*Subject M*Subject M*Subject M*
-50 0 50-4
-2
0
2
4Subject BSubject BSubject BSubject BSubject BSubject B
Head position(degrees; + up)
-50 0 50-4
-2
0
2
4Subject BSubject BSubject BSubject BSubject BSubject B
Eye position(deg; + down)
-50 0 50-4
-2
0
2
4Subject B*Subject B*Subject B*Subject B*Subject B*Subject B*
Head position(degrees; + up)
-50 0 50-4
-2
0
2
4Subject B*Subject B*Subject B*Subject B*Subject B*Subject B*
Eye position(deg; + down)
-50 0 50-4
-2
0
2
4Subject YSubject YSubject YSubject YSubject YSubject Y
-50 0 50-4
-2
0
2
4Subject YSubject YSubject YSubject YSubject YSubject Y

83
Position-dependent misalignment increased in most experiments
* eye-head dissociation paradigm
H H* J J* L M* B B* Y-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
**
**
**
**
**
**
**
**
Coe
ffici
ent o
f cha
nge
in p
ositi
on-d
epen
dent
mis
alig
nmen
t fro
m p
re to
pos
t (de
g/de
g)
Subject
0
10
20
30
40
50
60
% o
f req
uest
ed g
ain
chan
ge
** p<0.01; GEE

84-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Head position (deg; + up)
Ideal results demonstrating eye position-dependent adaptation
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Eye position (deg; + down)
-50 0 50-4
-3
-2
-1
0
1
2
3
4V
ertic
al m
isal
ignm
ent
(deg
rees
; rig
ht-le
ft; +
up)
Head position (deg; + up)
Ideal results demonstrating head position-dependent adaptation
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Eye position (deg; + down)
Up target
fixatio
n
Center ta
rget fi
xatio
n
Down targ
et fixati
on

85
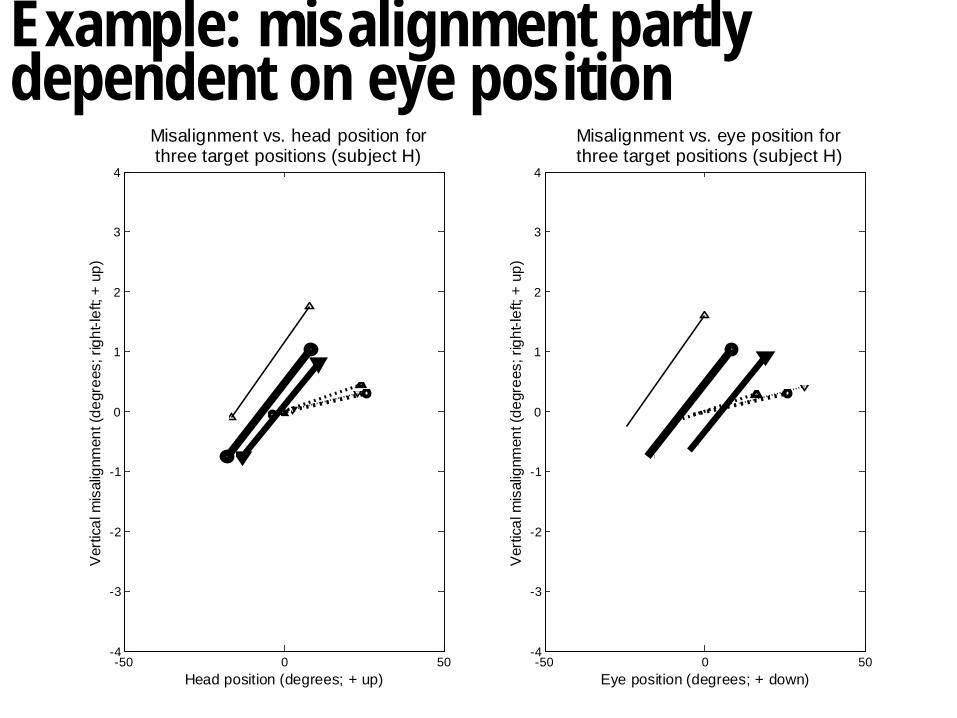
Example: misalignment dependent on head position
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Head position (degrees; + up)-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. eye position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Eye position (degrees; + down)
index of head-position-dependent adaptationheadeye
headeye
MSMSMSMS
+−
=

86
Example: misalignment partly dependent on eye position
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Head position (degrees; + up)-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. eye position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Eye position (degrees; + down)

87
Is adaptation dependent on eye or head? Compare mean sum-of-squares of regression for
misalignment on eye, and misalignment on head
H H* J J* L M* B B* Y-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Inde
x of
hea
d-po
sitio
n-de
pend
ent a
dapt
atio
n
Subject
Subject exhibits head-position-dependent adaptation
Subject exhibits eye-position-dependent adaptation

88
Pitch plasticity study – summary Position-dependent misalignments were adapted in
all subjects
Head position was implicated as the adaptation cue in most subjects
Otolith organs or SCC could be driving adaptation
In the next study, we performed the same adaptation and also tested in vertical translation, which stimulated the otolith organs but not the SCC

89
Vertical translate studyPre-test Vertical (monocular target)
Pre-test Pitch (monocular target)
Adapt Pitch(15 min)
Post-test Pitch (monocular target)
Adapt Pitch(5 min)
Post-test vertical(monocular target)

900.95 Hertz ±0.7 g peak acceleration
4 6 8 10 12 14 16 18-10
-5
0
5
10
Upward
Downward
Time (seconds)Ver
tical
acc
eler
atio
n (m
/s2 ) Vertical sled movement characteristics
4 6 8 10 12 14 16 18-2
-1
0
1
2
Time (seconds)
Ver
tical
vel
ocity
(m/s
)
4 6 8 10 12 14 16 18
-0.2
-0.1
0
0.1
0.2
0.3
Top
Bottom
Time (seconds)
Ver
tical
pos
ition
(m)

91
Response to vertical translation
170 175 180 185 190
-5
0
5
Hea
d ac
cele
ratio
n(m
/s/s
; + u
p)
Pre-adaptation response (subject J)
170 175 180 185 1900
2
4
6
8
Ver
genc
e an
gle
(deg
rees
)
170 175 180 185 190-20
-10
0
10
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
dow
n)
Right eyeLeft eye
170 175 180 185 190-2
-1
0
1
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Time (seconds)
2050 2055 2060 2065 2070
-5
0
5
Hea
d ac
cele
ratio
n(m
/s/s
; + u
p)
Post-adaptation response (subject J)
2050 2055 2060 2065 20700
2
4
6
8
Ver
genc
e an
gle
(deg
rees
)2050 2055 2060 2065 2070
-20
-10
0
10
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
dow
n)
2050 2055 2060 2065 2070-2
-1
0
1
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Time (seconds)

92
Sensitivity to vertical translation increases after adaptation of pitch response
Increase in sensitivity increases for 4 of 5 subjects
Change statistically significant in all subjects (GEE)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.083°/g (subject H)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.084°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.166°/g (subject H)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.190°/g (subject J)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.321°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.514°/g (subject J)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.289°/g (subject M)
Verti
cal m
isal
ignm
ent (
degr
ees;
righ
t-lef
t; +
up)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.086°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.375°/g (subject M)
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.053°/g (subject B)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change -0.078°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.133°/g (subject B)
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.217°/g (subject W)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.249°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.053°/g (subject W)
Vertical acceleration (g; 1 g=9.81 m/s2)
Pre-adaptation Post-adaptation Difference

93
Sensitivity to vertical translation increases after adaptation of pitch response
-0.05 0 0.05 0.1-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Gain change for active pitch rotation (°/°)Sens
itivi
ty c
hang
e fo
r ver
tical
tran
slat
ion
(°/g
)
H
J
B
M

94
Vertical translate study – summary
Head-position-dependent adaptation of misalignment during pitch rotation was otolith organ dependent
Adaptation transferred from otolith-dependent tilt response to otolith-dependent translation response
Misalignment is a tool to study the otolith-ocular pathway: it allows questions to be asked about tilt/translation which are difficult to answer using conjugate eye movements

95
What model of otolith organ information processing explains the transfer of
adaptation from pitch to vertical translation?
pitchangle
g vector
g vector
VT
NO
Polar coordinates
Cartesian components
VT
g vector
NO

96
0 20 40 60 80 100-20
0
20Pitch Plasticity Study
Hea
d pi
tch
angl
e(d
egre
es)
0 20 40 60 80 100-2
0
2
Car
tesi
anco
mpo
nent
s(g
= 9
.81
m/s
/s)
NOVT
0 20 40 60 80 100-4-2024 misalignment=c*pitchangle [c=-1/10]
Pol
ar
0 20 40 60 80 100-4-2024 misalignment=a*NO+b*VT [a=-4; b=0]
Mis
alig
nmen
t pre
dict
ed b
yC
arte
sian
NO
onl
y
0 20 40 60 80 100-4-2024 misalignment=a*NO+b*VT [a=-4; b=1]
Car
tesi
anN
O a
nd V
T(n
on-o
ptim
al)
0 20 40 60 80 100-4-2024 misalignment=b*(k*NO+VT) [b=1; k=-4]
Car
tesi
an(s
ingl
e kn
ob)
Time (seconds)
0 20 40 60 80 100-1
0
1Vertical Translate Study
0 20 40 60 80 100-2
0
2
0 20 40 60 80 100-4-2024 misalignment=c*pitchangle [c=-1/10]
0 20 40 60 80 100-4-2024 misalignment=a*NO+b*VT [a=-4; b=0]
0 20 40 60 80 100-4-2024 misalignment=a*NO+b*VT [a=-4; b=1]
0 20 40 60 80 100-4-2024 misalignment=b*(k*NO+VT) [b=1; k=4]
Time (seconds)

97
Modeling – summary
Otolith organ information is processed in Cartesian components
Adaptation affects all g vector components equally

98
Conclusions Otolith-dependent eye misalignments can be
adaptively created during dynamic pitch rotation using a visual-vestibular mismatch
Adaptation transfers from otolith-transduced tilt responses to translation responses
Components of the g vector are used to determine the ocular response; adaptation affects all components equally

99
Application to countermeasures Adapting otolith reflexes during weightlessness is
expensive and of a short duration
Countermeasures can focus on adapting responses of individual Cartesian components
When appropriate g vector cannot be provided using translation, it can be provided using tilt

100
Future work Test for transfer when adapted Cartesian
components are the same
The relationship between head position and misalignment in the adaptive paradigm was linear –a parabolic relationship would separate otolith and SCC contributions
Transfer of adaptation from vertical translation to pitch rotation

101
Future work
Head orientation during adaptation during first test during second test rotation axis g vector
components stimulated
rotation axis g vector components stimulated
rotation axis g vector components stimulated
Pitch upright VT & NO Roll onside VT (&IA) Yaw onside NO (&IA) Roll upright VT & IA Pitch supine VT (&NO) Yaw supine IA (&NO) Yaw supine NO & IA Pitch upright NO (&VT) Roll upright IA (&VT)

102
Acknowledgements
Advisor: Dr. Mark Shelhamer Committee members: Drs. Paul
Fuchs, David Solomon, David Zee, Kechen Zhang
Technical assistance: Adrian Lasker, Dale Roberts, NASA staff, Dr. Andy Clarke
Scientific advise: Dr. Mark Walker, Dr. Howard Ying, School of Public Health Biostats Clinic
Funding: NSBRI, NIH, NSERC

103

104

105
Vertical eye misalignments during pitch rotation and vertical translation:
Evidence for bilateral asymmetries and plasticity in the otolith-ocular reflex
Dr. Faisal Karmali MEEI
September 10, 2007

106
Publications 12 conference abstracts Peer-reviewed publications
• Karmali F, Ramat S, Shelhamer M. Vertical skew due to changes in gravitoinertial force: A possible consequence of otolith asymmetry. Journal of Vestibular Research. 2006 Dec;16:117-125.
• Karmali F, Shelhamer M. Automatic Detection of Camera Translation in Eye Video Recordings using Multiple Methods. Annals of the New York Academy of Sciences. 2005 Apr;1039:470-6.
• Karmali F, Shelhamer M. Compensating for camera translation in video eye movement recordings by tracking a landmark selected automatically by a genetic algorithm. (submitted)
• Karmali F, Shelhamer M. The dynamics of parabolic flight: flight characteristics and passenger percepts. (submitted)
• Grabherr L, Karmali F, Bach S, Indermaur K, Metzler S, Mast FW. Mental Rotation of Bodies and Body-parts in Microgravity. Journal of Vestibular Research. 2007. (accepted)
• Karmali F, Ramat S, Straumann D, Shelhamer M. Binocular disconjugacy in slow and fast pitch vestibulo-ocular reflex: Evidence for otolithic influence. (in preparation)

107
Background

108
The Vestibular System “Sixth sense” that keeps us balanced Stops us from falling when we stumble Helps move eyes (“gaze stabilization”)
Patients with Vestibular Disease or stroke
Astronauts affected by weightlessness
VertigoDifficulty walkingEyes move incorrectly
Vertigo and motion sicknessDifficulty walking upon returnEyes move incorrectly

109
Vestibular-Ocular Reflexes
Otolith organs measure linear acceleration and gravity (contains utricle and saccule)
Semicircular canals (SCC) measure angular velocity
Eye movements opposite of head movements
Torsion is rotation of eye about the line of sight
Conjugate: eyes move together
Disconjugate: difference between left and right eyes

110
The otolith organ: a mass on a lever
The lever is a hair cell that measures deflection
The mass is called the otoconia and deflects when acted upon by external forces
g vector: the sum of linear acceleration and gravity 1 g of downward gravity is indistinguishable from 1 g of upward acceleration of the head
Temporal bone of the
head

111
Vertical misalignments during parabolic flight
Karmali, Ramat, Shelhamer, Journal of Vestibular Research. 2006 Dec;16:117-125
10 20 30 40 50 60
-5
0
5
Left Eye
Right Eye
Ver
tical
eye
posi
tions
(deg
rees
) y g g Right EyeLeft Eye
10 20 30 40 50 60-10
-5
0
5
10
Com
pens
ated
ver
tical
eye
po
sitio
ns (d
egre
es)
Right EyeLeft Eye
10 20 30 40 50 60
0
1
2
Time (seconds) Trial: D1
Gra
vito
iner
tial
acce
lera
tion
(g)

112
Otolith Asymmetry Hypothesis
Left Otolith
Right Otolith
Left Eye
Right Eye
g vector
Central Compensation

113
“Over 50% of utricular-activated, second-order vestibular neurons received commissural inhibition from the contralateral utricular nerve.”
“Almost all the saccular-activated, second-order vestibular neurons exhibit no response to stimulation of the contralateral saccular nerve.”
Uchino, 2004

114
Implications of otolith asymmetry1. It can predict space sickness: a better understanding
of the mechanisms may help to improve screening and produce simpler screening tests
2. It may reduce task performance by creating a sensory conflict or misaligning the eyes
3. Understanding how it adapts may be useful in training including partial adaptation before flight

115
Experimental Design

116
Motion profiles
0 20 40 60 80 100 120-4
-2
0
2
4
Par
abol
ic fl
ight Pitch angular position
g vector
0 20 40 60 80 100 120-4
-2
0
2
4
Pas
sive
pitc
h ro
tatio
n
0 20 40 60 80 100 120-4
-2
0
2
4
Act
ive
pitc
h ro
tatio
n
0 20 40 60 80 100 120-4
-2
0
2
4
Ver
tical
sle
d tra
nsla
tion
Time (seconds)

117
Motion profileSensory receptor
Passive pitch rotation (full body)
Active pitch rotation Vertical translation
Otolith organs Changing orientation relative to gravity
Changing orientation relative to gravity
Linear acceleration
Semicircular canals (SCC)
Only before vestibular time constant exceeded
Yes No
Orbital eye position
Yes, due to counterpitch response
Yes Yes
Collic (neck) reflex
No Yes No
Sensory environment during motion profiles

118
Motion profileSensory receptor
Passive pitch rotation (full body)
Active pitch rotation Vertical translation
Otolith organs Changing orientation relative to gravity
Changing orientation relative to gravity
Linear acceleration
Semicircular canals (SCC)
Only before vestibular time constant exceeded
Yes No
Orbital eye position
Yes, due to counterpitch response
Yes Yes
Collic (neck) reflex
No Yes No
Cognitive intent No Yes NoCognitive anticipation
Some situations Yes Yes
Sensory environment during motion profiles

119
Slow test Pitch
Medium testPitch
Fast test Pitch
Pre-test Pitch (monocular targets)
Adapt Pitch (20 min)
Post-test Pitch (monocular targets)
Pre-test Vertical (monocular target)
Pre-test Pitch (monocular target)
Adapt Pitch (15 min)
Post-test Pitch (monocular target)
Adapt Pitch (5 min)
Post-test vertical (monocular target)
The pitch innate study
The pitch plasticity study
The vertical translate study
Study procedures

120
Scleral contact lens coils Coil frame in a cube that consists of
three orthogonal magnetic fields oscillating at different frequencies
Coil acts as antenna that picks up a linear combination of the three that depends on its orientation
Accuracy <0.01º Wire is fragile, and often breaks Small coil frame used on vertical sled – data for pitch
not usable during the vertical translate study

121
Generalized Estimating Equations
t-test is often used to compare time-series data in two different conditions
t-test assumes independence between measures, which is not usually the case with rapidly-changing, sampled data such as eye position
GEE is a more correct and stringent technique that takes into account the correlation of the data with itself
t-test will sometimes indicate significance when GEE does not
Zeger, S. L. & Liang, K. Y. (1986). Longitudinal data analysis for discrete and continuous outcomes. Biometrics 42, 121-130.Karmali, Ramat, Shelhamer, Journal of Vestibular Research. 2006 Dec;16:117-125

122
Pitch innate study
coils

123
Static alignment
0 0.5 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Time (seconds)
Subject AV
ertic
al m
isal
ignm
ent (
Deg
rees
, rig
ht-le
ft, +
dow
n)
0° (τ=3.26 s)least-squares fit270° (τ=0.35 s)least-squares fit180° (τ=0.00 s)least-squares fit90° (τ=0.32 s)least-squares fit
0 0.5 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Time (seconds)
Subject T
0° (τ=0.00 s)least-squares fit270° (τ=0.00 s)least-squares fit180° (τ=0.00 s)least-squares fit90° (τ=0.00 s)least-squares fit
0 0.5 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Time (seconds)
Subject S
0° (τ=0.43 s)least-squares fit270° (τ=0.59 s)least-squares fit180° (τ=0.91 s)least-squares fit90° (τ=0.37 s)least-squares fit
0 0.5 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Time (seconds)
Subject E
0° (τ=0.52 s)least-squares fit270° (τ=0.50 s)least-squares fit180° (τ=0.00 s)least-squares fit90° (τ=0.00 s)least-squares fit
0 0.5 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Time (seconds)
Subject Q
0° (τ=5.85 s)least-squares fit270° (τ=1.26 s)least-squares fit180° (τ=0.59 s)least-squares fit90° (τ=0.42 s)least-squares fit

124
0 20 40 60 80 100 120 140-2
0
2
4
6
8
Ver
tical
eye
pos
ition
s (d
egre
es, +
dow
n)
Vertical misalignment during slow pitch rotation (6 deg/sec)
Right eyeLeft eye
0 20 40 60 80 100 120 1400
200
400BackwardRotation
ForwardRotation
Cha
ir po
sitio
n (d
egre
es)
-slo
pe p
itch
forw
ard
Time
Slow rotation – 6º/sec

125
Medium rotation – 60º/sec
0 5 10 15 20 25 30 35 40 45 50 55-20
-10
0
10
20
Time (seconds)
Ver
tical
eye
pos
ition
s(d
egre
es, +
dow
n) Right eyeLeft eyeChair positionTarget flash
0 5 10 15 20 25 30 35 40 45 50 55-1
-0.5
0
0.5
1
Time (seconds)
Ver
tical
mis
alig
nmen
t(d
egre
es, r
ight
-left,
+do
wn)
Vertical misalignmentChair positionTarget flash
0 50 100 150 200 250 300 350-1.5
-1
-0.5
0
0.5
1
1.5
Chair position (degrees)
Ver
tical
mis
alig
nmen
t(d
egre
es, r
ight
-left,
+do
wn)
Upright
Upside-down
Upright

126
0 1000 2000 3000 4000 5000 6000 7000 8000-100
-80
-60
-40
-20
0
Ver
tical
eye
pos
ition
s (d
egre
es, +
dow
n)
Right eyeLeft eyeChair position (inverted)
0 1000 2000 3000 4000 5000 6000 7000 8000-2
-1.5
-1
-0.5
0
0.5
1
Fixa
tion
targ
et o
ff
Fixa
tion
targ
et o
n
Ver
tical
mis
alig
nmen
t(d
egre
es, r
ight
-left,
+do
wn)
0 1000 2000 3000 4000 5000 6000 7000 8000-100
-50
0
50
100
Ver
tical
eye
vel
ocity
(deg
/s, +
dow
n)
0 1000 2000 3000 4000 5000 6000 7000 8000-4
-2
0
2
4
Time (ms)
Mis
alig
nmen
t vel
ocity
(deg
/s, r
ight
-left,
+do
wn)
Fast rotation – 2 second steps

127
-3000 -2000 -1000 0 1000 2000 3000 4000 5000 6000-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Time (msec)
Ver
tical
mis
alig
nmen
t(d
egre
es, r
ight
-left,
+do
wn)
Forward movement
Fixa
tion
targ
et o
ff
Mov
emen
tco
mm
ence
s
Fixa
tion
targ
et o
n
-3000 -2000 -1000 0 1000 2000 3000 4000 5000 6000-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Time (msec)
Ver
tical
mis
alig
nmen
t(d
egre
es, r
ight
-left,
+do
wn)
Backward movement
Fixa
tion
targ
et o
ff
Mov
emen
tco
mm
ence
s
Fixa
tion
targ
et o
n
upright→supinesupine→upside-downupside-down→proneprone→upright
Fast rotation – 2 second steps

128
Backward movement
uprig
ht→
supi
ne
supi
ne→
upsi
de-d
own
upsi
de-d
own→
pron
e
pron
e→up
right
ATSEQ
-5
-4
-3
-2
-1
0
1
2
3
4
5
g
g(d
egre
es, r
ight
-left,
+do
wn)
Forward movement
uprig
ht→
pron
e
pron
e→up
side
-dow
n
upsi
de-d
own→
supi
ne
supi
ne→
uprig
htATSEQ
Fast rotation – 2 second steps

129
A E Q R S T
-3
-2
-1
0
1
2
3
**
**
**
*
**
**
ns
**
ns
Fast
: pea
k m
isal
ignm
ent (
forw
ard)
Fast
: pea
k m
isal
ignm
ent (
back
war
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(fo
rwar
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(ba
ckw
ard)
Sta
tic o
rient
atio
n: m
isal
ignm
ent d
iffer
entia
lS
low
: pea
k ve
rtica
l mis
alig
nmen
t (fo
rwar
d)S
low
: pea
k m
isal
ignm
ent (
back
war
d)M
ediu
m: m
isal
ignm
ent d
iffer
entia
l (fo
rwar
d)M
ediu
m: m
isal
ignm
ent d
iffer
entia
l (ba
ckw
ard)
**
**
**
*
**
*
**
Fast
: pea
k m
isal
ignm
ent (
forw
ard)
Fast
: pea
k m
isal
ignm
ent (
back
war
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(fo
rwar
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(ba
ckw
ard)
Sta
tic o
rient
atio
n: m
isal
ignm
ent d
iffer
entia
lS
low
: pea
k ve
rtica
l mis
alig
nmen
t (fo
rwar
d)S
low
: pea
k m
isal
ignm
ent (
back
war
d)
** **
*
ns
ns
**
ns
Fast
: pea
k m
isal
ignm
ent (
forw
ard)
Fast
: pea
k m
isal
ignm
ent (
back
war
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(fo
rwar
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(ba
ckw
ard)
Sta
tic o
rient
atio
n: m
isal
ignm
ent d
iffer
entia
lS
low
: pea
k ve
rtica
l mis
alig
nmen
t (fo
rwar
d)S
low
: pea
k m
isal
ignm
ent (
back
war
d)M
ediu
m: m
isal
ignm
ent d
iffer
entia
l (fo
rwar
d)
**
Med
ium
: mis
alig
nmen
t diff
eren
tial (
forw
ard)
Med
ium
: mis
alig
nmen
t diff
eren
tial (
back
war
d)
**
ns
ns
ns
**
Fast
: pea
k m
isal
ignm
ent (
forw
ard)
Fast
: pea
k m
isal
ignm
ent (
back
war
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(fo
rwar
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(ba
ckw
ard)
Sta
tic o
rient
atio
n: m
isal
ignm
ent d
iffer
entia
l
ns
**
ns
**
Fast
: pea
k m
isal
ignm
ent (
forw
ard)
Fast
: pea
k m
isal
ignm
ent (
back
war
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(fo
rwar
d)Fa
st: p
eak
mis
alig
nmen
t vel
ocity
(ba
ckw
ard)
Sta
tic o
rient
atio
n: m
isal
ignm
ent d
iffer
entia
l
Med
ium
: mis
alig
nmen
t diff
eren
tial (
back
war
d)
Subject
Verti
cal m
isal
ignm
ent (
Deg
rees
, rig
ht-le
ft, +
dow
n)Summary of vertical eye misalignments for static orientation and slow, medium and fast pitch rotations
Static orientation: misalignment differentialSlow: peak vertical misalignment (forward)Slow: peak misalignment (backward)Medium: misalignment differential (forward)Medium: misalignment differential (backward)Fast: significance of orientation dependence - peak misalignment (forward)Fast: significance of orientation dependence - peak misalignment (backward)Fast: significance of orientation dependence - peak misalignment velocity (forward)Fast: significance of orientation dependence - peak misalignment velocity (backward)

130
Pitch innate study - summaryMisalignment determined by
Average misalignment difference between upright & upside-down
Number of significant subjects (p<0.01; GEE)
Static Orientation 0.99º 3/5
Slow Orientation 1.74º 3/3
Medium Orientation 0.39º 3/4
Fast Angular velocity (orientation significant in 1/5 subjects)
1.86º (peak misalignment) Velocity-dependent
misalignments implicate SCC pathway
Orientation-dependent misalignments implicate asymmetry in otolith pathway
Otolith asymmetry acts in both:• pitch rotation - g vector direction changing• vertical acceleration - g vector magnitude changing

131
Goal: understand the nature of central compensation Study the ability of the brain to learn an otolith organ-dependent
misalignment during dynamic head movements Subject performs active pitch rotation Induced a vertical misalignment of the eye by presenting a
visual disparity between the left and right eyes Subject wears red-blue glasses Real-time head position is fed to laptop which projects a field of
dots onto a screen The dots have a vertical disparity between left and right eyes Regular & eye-head dissociation paradigms
Pitch plasticity study

132
Pitch plasticity study
95 100 105 110 115 120
-20
0
20
40
Hea
d po
sitio
n(d
egre
es; +
up)
95 100 105 110 115 120
-40
-20
0
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
up) Right eye
Left eye
95 100 105 110 115 120-1
0
1
2
3
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
95 100 105 110 115 120
-0.1-0.05
00.050.1
Mis
alig
nmen
t gai
n
Time (seconds)
1645 1650 1655 1660 1665 1670
-20
0
20
40
Hea
d po
sitio
n(d
egre
es; +
up)
1645 1650 1655 1660 1665 1670
-40
-20
0
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
up)
1645 1650 1655 1660 1665 1670-1
0
1
2
3
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
1645 1650 1655 1660 1665 1670
-0.1-0.05
00.050.1
Mis
alig
nmen
t gai
n
Time (seconds)
Pre-adaptation Post-adaptation

133-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject J)
Verti
cal m
isal
ignm
ent (
degr
ees;
righ
t-lef
t; +
up)
Head position (degrees; + up)
Pre-adaptation
Post-adaptation

134
-50 0 50-4
-2
0
2
4Subject HSubject HSubject HSubject HSubject HSubject H
Standard paradigm
-50 0 50-4
-2
0
2
4Subject HSubject HSubject HSubject HSubject HSubject H
-50 0 50-4
-2
0
2
4Subject H*Subject H*Subject H*Subject H*Subject H*Subject H*
Eye-head dissociation paradigm
-50 0 50-4
-2
0
2
4Subject H*Subject H*Subject H*Subject H*Subject H*Subject H*
-50 0 50-4
-2
0
2
4Subject JSubject JSubject JSubject JSubject JSubject J
-50 0 50-4
-2
0
2
4Subject JSubject JSubject JSubject JSubject JSubject J
-50 0 50-4
-2
0
2
4Subject J*Subject J*Subject J*Subject J*Subject J*Subject J*
-50 0 50-4
-2
0
2
4Subject J*Subject J*Subject J*Subject J*Subject J*Subject J*
-50 0 50-4
-2
0
2
4Subject LSubject LSubject LSubject LSubject LSubject L
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
-50 0 50-4
-2
0
2
4Subject LSubject LSubject LSubject LSubject LSubject L
-50 0 50-4
-2
0
2
4Subject M*Subject M*Subject M*Subject M*Subject M*Subject M*
-50 0 50-4
-2
0
2
4Subject M*Subject M*Subject M*Subject M*Subject M*Subject M*
-50 0 50-4
-2
0
2
4Subject BSubject BSubject BSubject BSubject BSubject B
Head position(degrees; + up)
-50 0 50-4
-2
0
2
4Subject BSubject BSubject BSubject BSubject BSubject B
Eye position(deg; + down)
-50 0 50-4
-2
0
2
4Subject B*Subject B*Subject B*Subject B*Subject B*Subject B*
Head position(degrees; + up)
-50 0 50-4
-2
0
2
4Subject B*Subject B*Subject B*Subject B*Subject B*Subject B*
Eye position(deg; + down)
-50 0 50-4
-2
0
2
4Subject YSubject YSubject YSubject YSubject YSubject Y
-50 0 50-4
-2
0
2
4Subject YSubject YSubject YSubject YSubject YSubject Y

135
Position-dependent misalignment increased in most experiments
* eye-head dissociation paradigm
H H* J J* L M* B B* Y-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
**
**
**
**
**
**
**
**
Coe
ffici
ent o
f cha
nge
in p
ositi
on-d
epen
dent
mis
alig
nmen
t fro
m p
re to
pos
t (de
g/de
g)
Subject
0
10
20
30
40
50
60
% o
f req
uest
ed g
ain
chan
ge
** p<0.01; GEE

136-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Head position (deg; + up)
Ideal results demonstrating eye position-dependent adaptation
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Eye position (deg; + down)
-50 0 50-4
-3
-2
-1
0
1
2
3
4V
ertic
al m
isal
ignm
ent
(deg
rees
; rig
ht-le
ft; +
up)
Head position (deg; + up)
Ideal results demonstrating head position-dependent adaptation
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Eye position (deg; + down)
Up target
fixatio
n
Center ta
rget fi
xatio
n
Down targ
et fixati
on

137
Example: misalignment dependent on head position
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Head position (degrees; + up)-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. eye position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Eye position (degrees; + down)
index of head-position-dependent adaptationheadeye
headeye
MSMSMSMS
+−
=
138
Example: misalignment partly dependent on eye position
-50 0 50-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. head position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Head position (degrees; + up)-50 0 50
-4
-3
-2
-1
0
1
2
3
4
Misalignment vs. eye position forthree target positions (subject H)
Ver
tical
mis
alig
nmen
t (de
gree
s; ri
ght-l
eft;
+ up
)
Eye position (degrees; + down)

139
Is adaptation dependent on eye or head? Compare mean sum-of-squares of regression from
misalignment on eye and misalignment on head
H H* J J* L M* B B* Y-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Inde
x of
hea
d-po
sitio
n-de
pend
ent a
dapt
atio
n
Subject
Subject exhibits head-position-dependent adaptation
Subject exhibits eye-position-dependent adaptation

140
Pitch plasticity study – summary Position-dependent misalignments were adapted in
all subjects Head position was implicated as the adaptation cue
in most subjects Otolith organs or SCC could be driving adaptation In the next study, we performed this experiment and
tested in vertical translation, which stimulated the otolith organs but not the SCC

141
Vertical translate study
Pre-test Vertical (monocular target)
Pre-test Pitch (monocular target)
Adapt Pitch (15 min)
Post-test Pitch (monocular target)
Adapt Pitch (5 min)
Post-test vertical (monocular target)
The vertical translate study

1420.95 Hertz ±0.7 g peak acceleration
4 6 8 10 12 14 16 18-10
-5
0
5
10
Upward
Downward
Time (seconds)Ver
tical
acc
eler
atio
n (m
/s2 ) Vertical sled movement characteristics
4 6 8 10 12 14 16 18-2
-1
0
1
2
Time (seconds)
Ver
tical
vel
ocity
(m/s
)
4 6 8 10 12 14 16 18
-0.2
-0.1
0
0.1
0.2
0.3
Top
Bottom
Time (seconds)
Ver
tical
pos
ition
(m)

143
Response to vertical translation
170 175 180 185 190
-5
0
5
Hea
d ac
cele
ratio
n(m
/s/s
; + u
p)
Pre-adaptation response (subject J)
170 175 180 185 1900
2
4
6
8
Ver
genc
e an
gle
(deg
rees
)
170 175 180 185 190-20
-10
0
10
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
dow
n)
Right eyeLeft eye
170 175 180 185 190-2
-1
0
1
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Time (seconds)
2050 2055 2060 2065 2070
-5
0
5
Hea
d ac
cele
ratio
n(m
/s/s
; + u
p)
Post-adaptation response (subject J)
2050 2055 2060 2065 20700
2
4
6
8
Ver
genc
e an
gle
(deg
rees
)2050 2055 2060 2065 2070
-20
-10
0
10
20
Ver
tical
eye
pos
ition
s(d
egre
es; +
dow
n)
2050 2055 2060 2065 2070-2
-1
0
1
Ver
tical
mis
alig
nmen
t(d
egre
es; r
ight
-left;
+ u
p)
Time (seconds)

144
Sensitivity to vertical translation increases after adaptation of pitch response
Increase in sensitivity increases for 4 of 5 subjects
Change statistically significant in all subjects (GEE)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.083°/g (subject H)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.084°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.166°/g (subject H)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.190°/g (subject J)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.321°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.514°/g (subject J)
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.289°/g (subject M)
Verti
cal m
isal
ignm
ent (
degr
ees;
righ
t-lef
t; +
up)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.086°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.375°/g (subject M)
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.053°/g (subject B)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change -0.078°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.133°/g (subject B)
-1 -0.5 0 0.5 1-1
0
1Sensitivity -0.217°/g (subject W)
-1 -0.5 0 0.5 1-1
0
1Sensitivity change 0.249°/g
-1 -0.5 0 0.5 1-1
0
1Sensitivity 0.053°/g (subject W)
Vertical acceleration (g; 1 g=9.81 m/s2)

145
Sensitivity to vertical translation increases after adaptation of pitch response
-0.05 0 0.05 0.1-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Gain change for active pitch rotation (°/°)Sens
itivi
ty c
hang
e fo
r ver
tical
tran
slat
ion
(°/g
)
H
J
B
M

146
Vertical translate study – summary
Head-position-dependent adaptation of misalignment during pitch rotation was otolith organ dependent
Adaptation transferred from otolith-dependent tilt response to otolith-dependent translation response
Misalignment is a tool to study the otolith-ocular pathway: it allows questions to be asked about tilt/translation which are difficult to answer using conjugate eye movements

147
Modeling
What is the nature of the central compensation? What model of otolith organ information processing
explains the transfer of adaptation from pitch rotation to vertical translation?

148
Model overview
Right otolith organ
Left otolith organ
Sensorimotor processing
Central compensation
Sensorimotor processing +
+
–
Left eye position
Right eye position
Visual processing of misalignment
Head tilt and translation
Commissure
Leye
Raff
Reye
Lcomm
Rcomm
Laff
–k
–k Vertical eye misalignment
Eye plant
Eye plant
AdditiveMultiplicativeContext-specific adaptation

149
Additive vs.MultiplicativeCompensation -1 0 1 2
Rcomm=(q*g)
Lcomm=g
Pre-commissural neurons
No
com
pens
atio
n
-1 0 1 2
Reye=(q*g)-k*g
Leye=g-k*(q*g)
Post-commissural neurons
-1 0 1 2
Lcomm=g
Rcomm=(q*g-a)
Pre
-com
mis
sura
lad
ditiv
e
-1 0 1 2
Leye=g-k*(q*g-a)
Reye=(q*g-a)-k*g
-1 0 1 2
Raff=q*g
Laff=g
Otolith organ afferents
neur
onal
firin
g ra
te
g level (g)
-1 0 1 2
Lcomm=gRcomm=(q*g*b)
Pre
-com
mis
sura
lm
ultip
licat
ive
-1 0 1 2
Leye=g-k*(q*g*b)Reye=(q*g*b)-k*g
-1 0 1 2
Rcomm=(q*g)
Lcomm=g
Pos
t-co
mm
issu
ral
addi
tive
-1 0 1 2
Leye=g-k*(q*g)-c
Reye=(q*g)-k*g
-1 0 1 2
Rcomm=(q*g)
Lcomm=g
Pos
t-co
mm
issu
ral
mul
tiplic
ativ
e
g level (g)-1 0 1 2
Leye=g-k*(q*g)Reye=d*((q*g)-k*g)
g level (g)

150
What model of otolith organ information processing explains the transfer of
adaptation from pitch to vertical translation?
pitchangle
g vector
g vector
VT
NO
g vector model
g vector components model
VT
g vector
NO

151
Eye torsion with head tilted during change g level Torsion changes even though g vector direction does not
change Suggests the g vector component determines torsion

152
0 20 40 60 80 100-20
0
20Pitch Plasticity Study
Hea
d pi
tch
angl
e(d
egre
es)
0 20 40 60 80 100-2
0
2
g ve
ctor
com
pone
nts
(g =
9.8
1 m
/s/s
)
NOVT
0 20 40 60 80 100-4-2024
misalignment=c*pitchangle [c=-1/10]
g ve
ctor
mod
el
0 20 40 60 80 100-4-2024
misalignment=a*NO+b*VT [a=-4; b=0]
Mis
alig
nmen
t pre
dict
ed b
yg
vect
orco
mpo
nent
s m
odel
0 20 40 60 80 100-4-2024
misalignment=a*NO+b*VT [a=-4; b=1]
g ve
ctor
com
pone
nts
mod
el(n
on-o
ptim
al)
0 20 40 60 80 100-4-2024
misalignment=b*(k*NO+VT) [b=1; k=-4]
g ve
ctor
com
pone
nts
mod
el(s
ingl
e kn
ob)
Time (seconds)
0 20 40 60 80 100-1
0
1Vertical Translate Study
0 20 40 60 80 100-2
0
2
0 20 40 60 80 100-4-2024
misalignment=c*pitchangle [c=-1/10]
0 20 40 60 80 100-4-2024
misalignment=a*NO+b*VT [a=-4; b=0]
0 20 40 60 80 100-4-2024
misalignment=a*NO+b*VT [a=-4; b=1]
0 20 40 60 80 100-4-2024
misalignment=b*(k*NO+VT) [b=1; k=4]
Time (seconds)

153
Modeling – summary
Context-specific adaptation is a likely candidate for central compensation
Otolith organ information is processed in g vector components
Adaptation affects all g vector components equally

154
Conclusions Vertical eye misalignments that are dependent on
the otolith organs occur during pitch rotation Vertical eye misalignments that are dependent on
the SCC occur during fast pitch rotation Otolith-dependent misalignments can be adaptively
created during dynamic pitch rotation using a visual-vestibular mismatch
Context-specific adaptation is a likely candidate for central compensation
Components of the g vector are used to determine the ocular response; adaptation affects all components equally

155
Implications Understanding central compensation in the otolith-
ocular pathway can improve the design of adaptation regiments for both astronauts and patients
Understanding how otolith information is used by the brain can guide the selection of motion profiles used for adaptation paradigms
The ability to measure innate misalignments using pitch rotation may help in assessing risks during spaceflight

156
Future work Model a SCC asymmetry by having canal planes that
are slightly different in the left and right ear The relationship between head position and
misalignment in the adaptive paradigm was linear –a parabolic relationship would help to separate otolith and SCC contributions
In fast rotation, SCC-dependent misalignments were implicated – further investigation is required
Transfer of adaptation from vertical translation to pitch rotation
Transfer of adaptation between otolith-dependent tilt and translation with conjugate eye movements

157
Future work
Head orientation during adaptation during first test during second test rotation axis g vector
components stimulated
rotation axis g vector components stimulated
rotation axis g vector components stimulated
Pitch upright VT & NO Roll onside VT (&IA) Yaw onside NO (&IA) Roll upright VT & IA Pitch supine VT (&NO) Yaw supine IA (&NO) Yaw supine NO & IA Pitch upright NO (&VT) Roll upright IA (&VT)

158
Acknowledgements
Advisor: Dr. Mark Shelhamer Committee members: Drs. Paul Fuchs, David Solomon, David
Zee, Kechen Zhang Collaborators: Dr. Stefano Ramat, Dr. Dominik Straumann,
Zurich University Hospital students & staff Technical assistance: Adrian Lasker, Dale Roberts,
NASA staff, Dr. Andy Clarke Scientific advise: Dr. Mark Walker, Dr. Howard Ying, SPH
Biostats Clinic Undergraduate researchers: Ondrej Juhasz, Anton Aboukhalil,
Tiffany Chen, Michelle Zwernemann Moral support: Zee lab, friends & family Funding: NSBRI, NIH, NSERC

159

160
Control of motion and posture
(AP Photo/Misha Japaridze)

161
The Vestibular System “Sixth sense” that keeps us balanced Stops us from falling when we stumble Helps move eyes (“gaze stabilization”)
Patients with Vestibular Disease or stroke
Astronauts affected by microgravity
VertigoDifficulty walkingEyes move incorrectly
Vertigo and motion sicknessDifficulty walking upon returnEyes move incorrectly
Studying astronauts will help us cure people on the ground

162
Background & Significance Astronauts and others exposed to unusual
acceleration environments get sick Torsional misalignment found in parabolic flight and
may be due to otolith asymmetry Motion sickness correlated with torsional misalignment Motion sickness correlated with an otolith mass
asymmetry in fish In pitch head movements, the otoliths detect a
changing g vector and contribute to eye movements

163
Vestibular-Ocular Reflexes
Otoliths measure linear acceleration and gravity (contains utricle and saccule)
Semicircular canals (SCC) measure angular velocity
Eye movements opposite of head movements
Torsion is rotation of eye about the line of sight
Conjugate: eyes move together
Disconjugate: difference between left and right eyes
Eye misalignment between L and R eye positionVisual disparity between what is seen by L and R eye

164
The otoliths: a mass on a lever
The lever is a hair cell that measures deflection
The mass is called the otoconia and deflects when acted upon by external forces
Gravito-inertial acceleration (g level): the sum of linear acceleration and gravity. 1 g of downward gravity is
indistinguishable from 1 g of upward acceleration of the head
Temporal bone of the
head

165
Otolith Asymmetry Hypothesis
Left Otolith
Right Otolith
Left Eye
Right Eye
g level (GIA)
Central Compensation

166
Implications of otolith asymmetry1. It can predict space sickness: a better understanding
of the mechanisms may help to improve screening and produce simpler screening tests
2. It may reduce performance by misaligning the eyes3. Understanding how it adapts may be useful in
training including partial adaptation before flight

169
Hypotheses An otolith asymmetry will manifest as ocular
misalignments when the magnitude and orientation of the g vector is unusual.
An otolith asymmetry will imbalance the otolith contribution to the pitch VOR, resulting in ocular misalignment
A reduction is misalignment will occur with experience in an environment, and this adaptation occurs within the central compensation mechanism

172
Experimental Methods: Parabolic Flight

173
Parabolic Flight Trajectory

175
Experimental Methods: Video eye movement recording Binocular (both eyes) 50 Hz Accelerometers and
rate sensors Subjects in darkness Software finds pupil in
image and computes gaze direction

178
Experimental Methods: Summary
0 20 40 60 80 100 120-4
-2
0
2
4
Par
abol
ic fl
ight
0 20 40 60 80 100 120-4
-2
0
2
4
Cen
trifu
gatio
n
0 20 40 60 80 100 120-4
-2
0
2
4
Pitc
h ro
tatio
n
Time (seconds)
Parabolic flightOtolith: vertical; change in magnitude (0-1.8 g) but not directionPitch rotation: 3 º/sRoll rotation: 0 º/sYaw rotation: 0 º/sCentrifugationOtolith: rotates in roll to vertical; change in magnitude 1-2 g and directionPitch rotation: 0 º/sRoll rotation: 1 º/sYaw rotation: 0 º/s to 100 º/s
Pitch rotationOtolith: continuously rotating in pitch; fixed magnitude gPitch rotation: up to 90 º/sRoll rotation: 0 º/sYaw rotation: 0 º/s

180
Perceptual Observation Operator: “Did you notice the light diverging at all?” Subject: “The little light… diverged, and I couldn’t get it to
come back together again when I was looking off to the right. The two divergent red lights were not always in the same relation to each other.”
Operator: “Did they separate completely horizontally, completely vertically or something in between?”
Subject: “…It was mostly vertically, but the bottom one would move across, moving horizontally more than the top one”
Subject: “I tried to focus them back on top of each other. They were always vertically separated but I tried to get them horizontally aligned.”
Subject #2: “For right targets, one moved up and to the left. For left targets one moved down and to the right.”
Subject #2: “At the end I didn’t notice it as much at all.”

181
Vertical Results: Video0 1 2
Gravity

184
Vertical eye position trace

187
Algorithm Automatically select a smaller rectangular landmark Find in each video frame using cross-correlation “Temporal feature-selection”
Goal Develop a method to detect vertical translation of the camera relative to the eye using features in the video image… using an automatically selected landmark

189
Co-correlation Metric to estimate motion of a landmark relative to other landmarks
Vertic
al loc
ation
of la
ndma
rk
Time (seconds)

190

194
3: How is disconjugacy influenced by target distance and position?
Target Near (12 cm) Far (30 cm) Overall
Right +1.54°±1.13° (n=18) +0.99°±1.04° (n=4) +1.44°±1.16° (n=22)
Left +0.99°±0.63° (n=9) +0.70°±0.65° (n=3) +0.92°±0.62° (n=12)
Center +0.90°±0.67° (n=9) +1.15°±0.00° (n=1) +0.93°±0.63° (n=10)
Up +1.20°±0.91° (n=4) - (n=0) +1.20°±0.91° (n=4)
Overall +1.24°±0.93° (n=40) +0.90°±0.79° (n=8) +1.18°±0.93°(n 48)
The magnitude of g-dependent vertical skew does not depend on the horizontal or vertical displacement of the fixation target (ANOVA; p>0.4)
Vertical skew is significantly smaller for far targets compared to near targets (t-test; p<0.1)
Aim 1: Parabolic flight vertical

196
Adaptation Vs. flight experience
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Parabolic flight experience in current campaign (flights)
Mag
nitu
de o
f ske
w d
iffer
entia
lbet
wee
n 0
g an
d 1.
8 g(
degr
ees)
Influence of flight experience on magnitude of skew differential
Significant trial (p<0.005)Not significantExponential fit (τ=3.69 flights, p<0.034)

198
Adaptation (Torsional disconjugacy)

201
Summary Aim 1: Determine how binocular alignment is disrupted during linear acceleration
The results provide evidence for vertical skew related to g level, possibly as a consequence of otolith asymmetry
The skew is does not varies with target position (comitant) but reduces with target distance
Vertical skew and torsional disconjugacy is reduced with exposure to parabolic flight
The relationship between vertical and torsional disconjugacies will be studied

203
Methods Rotate full body
in the pitch direction
Slow, medium, fast paradigms
Eye movements recorded with scleral search coils
Aim 2: Pitch Rotations
0 20 40 60 80 100 1200
100
200
300
Slo
w(6
deg
/s)
Position (deg)Velocity (deg/s)
0 20 40 60 80 100 1200
100
200
300M
ediu
m(6
0 de
g/s)
0 20 40 60 80 100 1200
100
200
300
Fast
ste
ps(9
0 de
g/s/
s)
Time (seconds)

204
0 20 40 60 80 100 120-10
0
10
Tors
iona
l eye
posi
tions
(deg
rees
)
0 20 40 60 80 100 120
0
2
4
6
8Vertical skew during slow pitch rotation (6 deg/sec)
Ver
tical
eye
posi
tions
(deg
rees
) Right eyeLeft eye
0 20 40 60 80 100 1200
100
200
300
400
BackwardRotation
ForwardRotation
Cha
ir po
sitio
n (d
egre
es)
Time
Slow pitch rotation

205
Medium pitch rotation
Pitch angle (deg)
Verti
cal s
kew
(deg
)
60 º/sec
Target flashes every 7 seconds resetting skew
Skew changes by 0.94º.
Will attempt to reduce noise by finding and removing fast phases

210
Summary of Aim 2: Determine how binocular alignment is disrupted during dynamic tilt (pitch VOR)
Vertical skew occur in pitching with different motion profiles
Torsional disconjugacy occurs in slow pitching; will look in medium, fast
Will look for correlation between vertical/torsional Will perform regression of all experimental data to
determine dependency on motion variables

215
Can an anatomically-based otolith asymmetry model explain the vertical and torsional disconjugacies?
Does a model suggest that the pathway is a direct otolith-vertical or that it is otolith-torsion-vertical?
Does the model correctly predict changes in disconjugacy with different vestibular and visual inputs?
Can the model predict adaptation? How are adaptation and central compensation related?
Aim 4: Model how otolith asymmetry could contribute to disruption of binocular alignment under these different motion scenarios

220
B: Does a model suggest that the pathway is:direct otolith-vertical or otolith-torsion-vertical?
A direct pathway is suggested by evidence that damage to the otolith pathway will result in vertical skew.
Otolith asymmetry
Torsion
Vertical disconjugate and conjugate offset
?
Torsion about an axis other than an optical axis will result in vertical movement.
It has been shown that torsion results from otolith asymmetry.
The model incorporated the geometry of how torsion about different axes would cause vertical movements. We will use experimental data to determine which axis is consistent

225
D: How to model influence of central compensation on vestibular nuclei
Central compensation
+
Vestibular nuclei
Left otolith
Right otolith
Left eyeRight eye
—
Central compensation
Left otolith
Right otolith
Left eyeRight eye
—
X
X

226
D: How to model influence of central compensation on vestibular nuclei
Central compensation
Left otolith
Right otolith
Left eyeRight eye
—
f
f
Context-specific adaptation

229
Acknowledgements
Advisor: Dr. Mark Shelhamer Parabolic flight studies: Dr. Stefano Ramat, Ondrej
Juhasz, Michelle Zwernemann, Anton Aboukhalil, Tiffany Chen, NASA staff
Pitch rotation: Dr. Dominik Straumann, Dr. Stefano Ramat, Zurich University Hospital staff
Scientific insights / moral support: Dr. David Zee & the lab

230
Recruitment The lab is looking for new students – rotations,
Masters, Ph.D.s Mark Shelhamer

232
Otolith asymmetry: Implications for disruption of human binocular alignment in
unnatural gravito-inertial environments
Faisal Karmali
October 11, 2006


















